Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida
Silva (UFCG/CCT/UAEM) 21 3 ANLISE DE POSIES E VELOCIDADES EM
MECANISMOS 3.1 Introduo
Osprincpiosdeprojetoesoluesdaengenhariadevemassegurarqueomecanismo
proposto ou a mquina no falhar sob as condies operacionais
previstas. Para isso, as tenses no
materialdevemsermantidasemumnvelbeminferiorstensesadmissveis.Paracalcularas
tenses,precisamosconhecerasforasestticasedinmicasdoscomponentesutilizados.Para
calcularasforasdinmicas,precisamosconhecerasaceleraes.Paracalcularasaceleraes
devemos,primeiro,encontraraposiodetodososelosouelementosnomecanismoparacada
movimentodeentrada;depois,derivarasequaesdeposioemrelaoaotempoafimde
encontrarmos as velocidades; e em seguida, derivar novamente e
obter as equaes de acelerao.
Issopodeserfeitopormuitosmtodos.Podemosusaraaproximaogrficaoupodemos
derivarasequaesgeraisparaomovimentoemqualquerposio.Seescolhermosasoluo
grfica para anlise, devemos gerar uma soluo grfica independente
para cada uma das posies
deinteresse,oquetornaoprocessobastantelongo.Emcontrapartida,umavezqueasoluo
analtica seja obtida para um mecanismo particular, ser rapidamente
resolvida por um computador para todas as posies, e ainda ser
possvel visualizar o seu desempenho em tempo real. 3.2 Anlise
Grfica da Posio e Velocidade Para qualquer mecanismo com um GDL,
somente um parmetro necessrio para definir a
posiodetodososelos.Oparmetrousualmenteescolhidoongulodoelodeentrada.Esse
mostrado como 2 na Figura 3.1. Queremos encontrar 3 e a posio do
cursor 4. Os comprimentos dos elos so
conhecidos.Aanlisegrficadesseproblemaumexercciobastantetrivialepodeserfeitausando
apenas trigonometria colegial, pois s exige o desenho em escala e
medio dos ngulos numa dada
posio,enquantoaanlisedeposioporequaesalgbricasmuitomaiscomplicada.Maso
contrrioverdadeiroparavelocidadeeespecialmenteparaaanlisedeacelerao.Aanlise
grfica de velocidade e de acelerao se torna muito mais complexa e
difcil nos casos de diagramas vetoriais grficos que devem ser
refeitos para cada uma das posies de interesse (Norton, 2010).
3.2.1 Anlise Algbrica da Posio
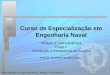
AFig.3.1mostraummecanismocompostodemanivela(2),biela(3)ecursor(4),onded
representaaposiodocursoremrelaoaoeixox.Asrelaesdoscomprimentosaebso
conhecidos e representam o raio da manivela e comprimento da biela
que completam o lao. Figura 3.1 Mecanismo biela-manivela e sua
representao. O2 1 x 3 2 y A B u2 4 Ax Ay d a b 3 Notas de Aulas de
MECANISMOS 2012.1 Professor Antonio Almeida Silva (UFCG/CCT/UAEM)
22 Para uma dada posio angular 2 da manivela, a posio linear do
cursor B : | u cos cos2b a d + = (3.1) Observando-se que o segmento
AAx o cateto oposto comum aos dois tringulos retngulos, tem-se a
relao:| u sin sin2b a = , donde pode-se obter os ngulos e 3 por | t
u u | u | =|.|
\|= =3 2 2; sin arcsin sin sinbaba (3.2) Se desejamos obter a
posio do cursor B, em funo do ngulo de entrada 2 deve-se fazer uso
da relao trigonomtrica: 2222sin 1 sin 1 cos u | ||.|
\| = =ba. Assim, a equao da posio do cursor B pode ser descrita
na forma: 2222sin 1 cos u u|.|
\| + =bab a d (3.3) Ou ainda, a fim de simplificar o lado
direito da Eq. (3.3), o radical pode ser aproximado pela Srie
infinita dada por: = 8 . 6 . 4 . 2. 5 . 3 . 16 . 4 . 2. 3 . 14 . 2.
1211 18 6 42 2| | || | (3.4)
Ousodosdoisprimeirostermosdasriejforneceumaprecisosuficienteparafinsde
clculo de engenharia. Assim, podemos adotar a relao aproximada,
222222sin211 sin 1 u u|.|
\| ~|.|
\|baba(3.5)
Portanto,substituindoaEq.(3.5)nosegundotermodaEq.(3.3),obtm-seaequao
aproximada da posio do cursor B: 2222sin2cos u ubab a d + ~(3.6)
3.2.2 Anlise Algbrica da Velocidade
Considerandoqueamanivelagiracomvelocidadeangularconstante2,equet2
2e u = ,
derivando-seaEq.(3.6)emrelaoaotempo,obtm-seaequaoaproximadadevelocidadedo
cursor B, dada por: Notas de Aulas de MECANISMOS 2012.1 Professor
Antonio Almeida Silva (UFCG/CCT/UAEM) 23 |.|
\|+ ~2 2 22 sin2sin u u ebaa VB (3.7)
Noexemploaseguir,sermostradoqueasequaesaproximadaseexatasdeposioe
velocidade do cursor B do resultados muito prximos em termos de
simulao computacional. Para isso, foi deduzido um procedimento
analtico e codificado num algoritmo em ambiente Matlab. Exemplo_01:
Biela-Manivela (Prob. 2.7, Mabie & Ockvirk) Desenvolver uma
rotina de computador para calcular os parmetros de posio e
velocidade
docursorBdomecanismomostradonaFig.(3.1).Useasequaesexataseaproximadas.Faa
a=50mm;b=100mm;n2=100rpm.(a)Calculeestesparmetrosparaumavoltacompletada
manivela, com intervalos de 15 para o ngulo 2. (b) Compare os
grficos resultantes. Soluo:
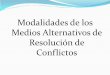
Assumindoasequaesdeduzidasacimaeimplementandoumarotinacomputacionalno
ambiente Matlab, tem-se os grficos a seguir. 0 50 100 150 200 250
300 3505060708090100110120130140150160Grfico de Posio do Cursor
Bngulo teta2 (graus) Deslocamento (mm) Curva ExataAproximada 0 50
100 150 200 250 300 350-600-400-2000200400600Grfico de Velocidade
do Cursor Bngulo teta2 (graus) Velocidade (mm/s) Curva
ExataAproximada Notas de Aulas de MECANISMOS 2012.1 Professor
Antonio Almeida Silva (UFCG/CCT/UAEM) 24 Observaes: Analisando o
grfico de velocidades, observa-se que o segundo termo da equao
exata (Eq. 3.3) se diferencia da aproximada (Eq. 3.6), apenas pela
presena de um radical no denominador, o que provoca uma pequena
distoro nas regies prximas do mximo e mnimo da
curva.Porm,essefatosetornamaiscrticoquandoseanalisaosgrficosdeaceleraespara
relaes (r/l)>0,3, que segundo especialistas em motores, causa
maiores vibraes (ver artigo). 3.3 Mtodos Grficos para Anlise de
Velocidade 3.3.1 Mtodo da Composio e Decomposio
Osprincpiosaseguirsoaplicveisasistemasarticuladosconsistindodecombinaesde
rotores, barras,cursores, cames,engrenagens e elementos rolantes.
Considera-se corpos rgidos os elos de mecanismos em que a distncia
entre dois pontos em movimento permanece invarivel.
UmapeadotipomanivelaquedvoltasouoscilaemtornodeumpontoQ,conformea
Fig. 3.2, possui magnitude da velocidade linear Va proporcional
distncia que separa o ponto em
questoAaoeixoderotaoQ.AdireodavelocidadeperpendicularlinhaQAeosentido
concordacomodavelocidadeangulardocorpom.Asmagnitudesdasvelocidadeslinearesdos
pontos B e C guardam com Va a mesma proporo de suas respectivas
distncias a Q.
Quandoseconheceavelocidadedeumpontodeumcorporgidom,pode-seobtera
velocidadedeoutropontodomesmocorpo,procedendo-seconformemostradonaFig.3.3.A
velocidadenopontoA,chamadaVa,completamenteconhecida,edavelocidadeemBsabe-se
apenas a direo na linha BM. Como se trata de um corpo rgido a
distncia AB invarivel, decompe-se Va e se encontra Aa que ser
transmitida para B, tal que Bb=Aa. O vetor Bb uma componente de Vb
que pode ser obtida pela composio de Bb na direo perpendicular reta
AB e que cruza com a direo de BM no ponto b1. Portanto, Vb ser dada
pelo vetor Bb1.
NaFig.3.4consideram-setrspontosA,BeCpertencentesaummesmocorporgidom,
onde se conhece Va completamente e apenas a direo de Vb.
Pretende-se encontrar a magnitude da velocidade Vb e Vc que
totalmente desconhecida. Fig. 3.2Fig. 3.3 Fig. 3.4 Notas de Aulas
de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 25 Seguindo o mesmo procedimento da Fig. 3.3,
encontra-se Vb. Em seguida, decompe-se Va
nadireodeACeVbnadireodeBC,representadosrespectivamentepelosvetoresAaeBb.
Deslocando-seestesvetoresparaopontoC,obtm-seCceCc1,quecompondonasdirees
perpendiculares s retas AC e BC, obtm-se o ponto c2 que representa
Vc. NaFig.3.5conhece-seporcompletoVa,adireodeVbnalinhaBMesepretende
encontrar Vc, que no se conhece nada. Por estarem A, B e C em linha
reta, no possvel aplicar o mesmo procedimento anterior da Fig. 3.4.
Porm pode-se obter rapidamente Vc considerando que o
corpomtemummovimentoangularinstantneoaoredordeumeixo,equeosvetores
representativosdasvelocidadesdeA,BeCperpendicularesaABdevemserproporcionaiss
distnciasdecadaumdestespontosaoeixoinstantneoderotao.Obtm-seVbconformej
mostrado na Fig. 3.3. Em seguida, traa-se Cc=Aa, e teremos a
componente de Vc na direo ACB. Por c passa-se uma perpendicular que
intercepta a linha que passa pelos pontos a1 e b1. O vetor Cc1 a
representao da velocidade linear Vc. 3.3.2 Mtodo dos Centros
Instantneos de Rotao Conceito de eixos instantneos de rotao O
conceito de eixos instantneos de rotao est associado idia de que,
num determinado
instante,cadaumadaspartesouelosdamquinagiraaoredordeumeixo,quepodeserfixoou
mvel. No caso do eixo mvel este pode ser considerado fixo por um
instante. A Fig. 3.6 representa uma pea oscilante de forma
qualquer. A velocidade linear do ponto A
completamenteconhecida,enquantonumoutropontoBdomesmocorposeconheceapenasa
direo-sentidodavelocidadeBX.OeixoinstantneoderotaoQpodeserdeterminadopela
interseo das perpendicularess direes das velocidades de ambos os
pontosA e B. No instante
considerado,todosospontosdocorpoemquestotendemagiraraoredordeQ.Amagnitudeda
velocidade de B se obtm partindo da magnitude de A, empregando a
semelhana de tringulos, por
queasvelocidadeslinearesinstantneasdecadaumdospontosdocorposoproporcionaiss
distncias dos pontos ao eixo Q. Fig. 3.6 Fig. 3.5 Notas de Aulas de
MECANISMOS 2012.1 Professor Antonio Almeida Silva (UFCG/CCT/UAEM)
26 Notao de centros instantneos de rotao A Fig. 3.7 mostra um
sistema de notao aplicado a um mecanismo de quatro barras, onde o
centro instantneo de rotao da pea 3 em relao pea fixa 1
denominado31 ou 13. Assim o centro instantneo de rotao da pea 2 em
relao pea 1 designado de 12 ou 21 e o da pea 4 em relao pea 1
designado de 14 ou 41 conforme mostrado. O centro instantneo de
rotao de uma pea em relao a outra, quando ambas as peas so mveis,
tambm de interesse. Tais centros so os pontos A e B, onde A2 e A3
tm uma velocidade absoluta em comum VA (centro mvel 32 ou 23) e de
modo semelhante B3 e B4 tm uma velocidade
absolutaemcomumVB(centromvel43ou34).Ocentroinstantneo42ou24tambmest
mostrado, e ser discutido na seo seguinte. Determinao de centros
instantneos de rotao - teorema de Kennedy Para trs corpos
independentes em movimento plano geral, o teorema de Kennedy
estabelece
queostrscentrosinstantneosderotaoestoemumalinharetacomum.NaFig.3.8astrs
peas 1, 2 e 3 esto em movimento uma em relao outra. H trs centros
instantneos de rotao (12, 13 e 23), cujas posies instantneas devem
ser
determinadas.Seapea1forconsideradafixa,asvelocidadesdaspartculasA2eB2dapea2eas
velocidades de D3 e E3 da pea 3 podem ser consideradas como
velocidades absolutas em relao
pea1.Ocentroinstantneo12podeserlocalizadopelainterseodasnormaissdireesdas
velocidades de A2 e B2. De modo semelhante localiza-se o centro 13,
por intermdio de D3 e E3.
Fig. 3.7 Fig. 3.8 Notas de Aulas de MECANISMOS 2012.1 Professor
Antonio Almeida Silva (UFCG/CCT/UAEM) 27 Resta determinar o
terceiro centro instantneo 23. Sobre uma reta traada pelos centros
12 e 13, existe uma partcula C2 da pea 2 a uma velocidade absoluta
Vc2 e que tem a mesma direo que
adavelocidadeVc3,dapartculaC3dapea3.ComoVc2proporcionaldistnciadeC2a12,
determina-se o mdulo de Vc2 de um modo semelhante. Na interseo das
retas de construo em k,
determina-seumaposiocomumC2eC3detalmodoqueasvelocidadesabsolutasVc2=Vc3so
idnticas.Estaposioocentroinstantneo23,porqueasvelocidadesabsolutasdaspartculas
coincidentes so comuns e porque o centro 23 est sobre uma linha
reta que une 12 e 13. O teorema de Kennedy bastante til na
determinao das posies dos centros instantneos em mecanismos que tm
um grande nmero de peas. Em relao a um nmero n de peas, h um
totalden(n-1)centrosinstantneosderotao.Entretanto,comoemcadaposiodoscentros
instantneos h dois centros comuns, o nmero total N de posies dado
por2 ) 1 ( = n n N . Exemplo_02: Mecanismo de Quatro Barras
(Composio e Centros instantneos)
SejaomecanismodequatrobarrasilustradonaFig.3.9,ondeavelocidadeangularda
manivelade100rpm,nosentidoanti-horrio,ea75comahorizontal.Dados:O2A=4,8cm;
AB=7,7cm;BD=4,3cm;AC=3,7cm;BC=5,6cm;O2O4=12,0cm;O4B=9,2cm;O4E=4,6cm.
Encontrar VB, VC, VD, VE e 4: a) Mtodo de composio e decomposio de
velocidades: s cm A O V s radnA/ 26 , 50 . / 47 , 1060) 100 ( 26022
222= = = = = et te
EscolhendoumaescaladevelocidadesapropriadaedesenhandoovetorVAemmdulo,
numa direo perpendicular manivela O2A e sentido de 2, inicia-se o
processo de decomposio
dessevetornadireoAB,ondeVA=VB.Emseguidacompe-seovetorresultante,traando-se
uma perpendicular ao segmento AB at encontrar VB. Aps a determinao
de VB, segue-se encontrandos radB OVB/ 98 , 36036,6044= = = ee
depois obtm-se Vc, Vd e Ve. Os resultados obtidos esto resumidos na
Tabela abaixo. Fig. 3.9 - Mecanismo de quatro barras (composio).
Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 28 b) Mtodo dos centros instantneos de rotao:
centrosn nN 62) 1 4 ( 42) 1 (=== Neste caso, por observao direta da
Fig. (3.10a), s precisamos determinar o centro 13, que servir para
determinar as velocidades Vb, Vc e Vd. Outra forma seria utilizando
o centro 24, conforme a Fig. (3.10b). Fig. 3.10a - Mecanismo de
quatro barras (centro 13). Notas de Aulas de MECANISMOS 2012.1
Professor Antonio Almeida Silva (UFCG/CCT/UAEM) 29 Tabela de
resultados: 2= 75 DADOS COMPOSIO E DECOMPOSIO DADOSCENTROS Va
(cm/s)50,26Va (cm/s)50,26 Vb (cm/s)36,60Vb (cm/s)36,50 Vc
(cm/s)53,20Vc (cm/s)50,30 Vd (cm/s)40,55Vd (cm/s)40,10 Ve
(cm/s)18,30Ve (cm/s)18,30 3 (rad/s)4,253 (rad/s)4,40 4 (rad/s)3,984
(rad/s)3,97 Fig. 3.10b - Mecanismo de quatro barras (centro 24)
Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 30 3.3.3 Mtodo dos Polgonos de Velocidade
Estemtodoutilizaoconceitodemovimentorelativoentrepartculasaplicadoacorpos
rgidos em geral. Seja a Fig. 3.11a onde P e Q so duas partculas que
se movem em relao a um
planoderefernciafixo,comvelocidadesVPeVQ,respectivamente.Deseja-sedeterminara
velocidaderelativaVPQentreasduaspartculas.Serconsideradoofatodequeasomadeduas
velocidades iguais e opostas a cada partcula no altera a velocidade
relativa das duas partculas. Figura 3.11 (a) Vetores no plano; (b)
e (c) Polgonos de velocidades. Portanto, se somarmos, s partculas P
e Q, duas velocidades uma igual e outra oposta a VQ, a partcula Q
ficar estacionria e P ganhar uma componente adicional de velocidade
- VQ relativa ao plano fixo. Assim, a nova velocidade relativa VPQ,
como ilustrado na Fig. 3.11b, dada por: Q P PQV V V = (3.8) De modo
semelhante VQP pode ser obtida atravs da soma vetorial de -VPa cada
partcula, conforme mostrado na Fig. 3.11c. VQP dado pela equao P Q
QPV V V = (3.9) Velocidade relativa de partculas em uma pea comum
DeacordocomaEq.(3.8),pode-sedeterminaravelocidaderelativaVPQdeumapartcula
em relao outra, a partir da diferena vetorial das velocidades
absolutas VP e VQ desde que estas
sejamconhecidas.Entretanto,emsistemasarticulados,conhece-sesomenteumadasvelocidades
absolutas e a outra deve ser determinada.A velocidade absoluta
desconhecida, VP , pode-se determinar da seguinte forma: PQ Q PV V
V + = (3.10)
EmboraVQsejaconhecida,necessrioqueavelocidaderelativaVPQtambmoseja.Em
sistemas articulados, os movimentos das partculas P e Q no so
independentes, mas so obrigadas a se deslocarem uma em relao outra
de modo que seus movimentos so
controlados.ConsiderandoocorporgidonaFig.3.12a,qualquerpartculatalcomoQpodeestar
velocidadeabsolutaVQeapeaaumavelocidadeangularabsoluta3.Seaobservaodo
movimentoforfeitaemrelaoaQ,entoQestaremrepouso,conformeindicadonaFig.
3.12b.Entretanto,desdequecadapartculaQnotenhamovimentoangular,avelocidade
Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 31 angular 3 da pea em relao aQ ficar inalterada.
Conforme a Fig. 3.12b, em relao a Q, a pea gira com velocidade
angular 3 em torno de Q como se Q fosse um centro fixo. Figura 3.12
Velocidade relativa de partculas em uma pea comum.
AvelocidaderelativaVPQdePemrelaoaQtangentetrajetriarelativacomona
Fig.3.12c.ComooraiodecurvaturaRdatrajetriarelativaigualaPQeavelocidade
angular r do raio de curvatura igual a 3, o mdulo de VPQ pode ser
determinado por: 3(PQ) = ePQV (3.11)
NaFig.3.12c,adireodeVPQtangentetrajetriacircularrelativaeindicadapor
umvetoratuandoemP.OsentidodeVPQdeterminadopelarotao de P em torno
de Q no mesmo sentido de3. Mostra-se na Fig.3.12d o vetorVQP
representando a velocidade deQ em relao a P. Pode-se ver que em
relao a P a velocidade 3 da pea 3 tem o mesmo mdulo e
sentidoquenomovimentoemrelaoaQ.Portanto,os mdulosdeVQPeVPQso os
mesmos. Suas direes tambm so as mesmas j que ambas so
perpendiculares linha PQ. Entretanto, o sentido de VQP oposto ao de
VPQ. Velocidade relativa de partculas coincidentes em peas
separadas Em muitos mecanismos tais como na Fig. 3.13, obtm-se a
limitao do movimento relativo
guiando-seapartculaPdeumapeaaolongodeumatrajetriapredeterminada,emrelao
outrapea,atravsdeumasuperfcie-guia.Talrestrioencontradaemcamesenasinverses
domecanismocursormanivela,ondeasuperfciedeumapeacontrolaomovimentodeuma
partcula sobre outra pea atravs de deslizamento ou rolamento.
NaFig.3.13,apartculaP3dapea3estemmovimentoaolongodeumatrajetria
curvilnea traada sobre a pea 2 devido ranhura-guia existente nessa
pea. Essa trajetria est
mostradanafiguraassimcomoatangentet-teanormaln-nquepassampelopontoP3.A
partcula Q2 da pea 2 coincide em posio com a partculaP3 da pea 3.
Pode-se ver que apesar das velocidades angulares absolutas 2 e 3
das peas 2 e 3, a guia restringe o movimento de P3
demodoqueessapartculanopodesedeslocaremrelaoaQ2nadireonormaln-ne,
portanto, no pode haver velocidade relativa entre as duas peas
nessa direo. Notas de Aulas de MECANISMOS 2012.1 Professor Antonio
Almeida Silva (UFCG/CCT/UAEM) 32 Entretanto, a guia permite,
partcula P3, liberdade para se deslocar em relao a Q2 na
direotangentet-te,portanto,avelocidaderelativaVP3Q2somentepoderestarnadireo
tangenteguia.Emmecanismosondearestriofeitaatravsdeguias,bastasaberquea
velocidade relativa de partculas coincidentes somente pode estar
nadireo tangente guia. Figura 3.13 Velocidade relativa de partculas
em peas separadas. Velocidade relativa de partculas coincidentes em
pontos de contato
Umterceirotipoderestrioemmecanismosaquelequeocorrequandoseobrigauma
peaarolarsobreoutrasemdeslizamentonopontodecontato.NaFig.3.14,mostram-seas
circunfernciasprimitivasdeumpardeengrenagensacopladascomaspartculascoincidentesno
pontodecontato,P3daengrenagem3eP2daengrenagem2.Comoascircunfernciasestoem
contatoderolamento,essaspartculastmvelocidadesiguaisdemodoqueVP3=VP2ea
velocidade relativa entre as duas partculas zero. Figura 3.14
Velocidade relativa de partculas em pontos de contato. Exemplo_03:
Mecanismo 4 barras com guia (polgonos de velocidade)
Considerandoomecanismoderetornorpido(Fig.3.15).Apea2seencontranaposio
2=60,girandocomumavelocidadeangular2=30rad/snadireoindicada.Determineas
velocidades lineares VB e VC e angulares 3 e 4 das peas 3 e 4.
Dados: O2A =102; R =203; AB =203; O2X
=203; AC =102; CB =152 mm. Notas de Aulas de MECANISMOS 2012.1
Professor Antonio Almeida Silva (UFCG/CCT/UAEM) 33 Soluo: a) Mtodo
dos polgonos de velocidades Realizando alguns clculos e escrevendo
as equaes das velocidades relativas no ponto B: cm/s; 306 A O = V2
2 A= . e ==+cm/s 230 Vcm/s 366 VAB VA O VB O VV V = VBABBA2 A4 BBA
A Bmedindo onde ; Fig. 3.15 Mecanismo de quatro barras com guia.
Medindo no polgono e calculando ento as velocidades angulares: s
radB OVs radABVB BA/ 03 , 183 , 20366; / 33 , 113 , 202304= = = = =
=4 3e e Em seguida, encontram-se as velocidades relativas ao ponto
C: Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida
Silva (UFCG/CCT/UAEM) 34 === + +cm/s 175 Vcm/s 113 Vcm/s 226 VCB VB
O VVV V = VCA VA O VVV V = VCBCACCB4 BCCB B CCA2 ACCA A Cmedindo
ondeonde?;?; Exemplo_04: Mecanismo Composto (Centros instantneos e
Polgonos) A Figura 3.16 representa um mecanismocomposto do
tipoWhitworth (Plaina limadora). A manivela 2, articulada ao cursor
3, gira no sentido horrio com velocidade de rotao de 500 rpm.
Encontrar as velocidades lineares nos pontos A, B e C e angular da
barra-guia 4. Dados: 0204= 3,0 cm; 02A= 5,5 cm; 04B= 3,5 cm; BC=
11,0 cm; u2= 55o. Fig. 3.16 Mecanismo Whitworth. a) Soluo pelo
mtodo dos centros: -Clculo do numero de centros:152) 1 6 ( 62) 1 n
( nN = = =- - -Identificando os centros por observao direta: (12,
23, 34, 45, 56, 14 e 16) -Usando o teorema de Kennedy, determinamos
os demais centros, conforme a Fig. 3.17: -Exemplo: 13
=>(12-23;14-34); 15 =>(16-56;14-45); 24 =>(12-14;23-34);
25 =>(12-15;24-45); 26 =>(12-16;25-56); ... Notas de Aulas de
MECANISMOS 2012.1 Professor Antonio Almeida Silva (UFCG/CCT/UAEM)
35 Fig. 3.17 Mtodo dos centros. -Em seguida, resolvemos para
acharmos as velocidades VA, VB, VC e 4. s cm VA/ 288 ) 5 , 5 (30)
500 (2= = t; Usando o centro 24, e V24obtm-ses cm VB/ 0 , 125 =
Notas de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 36 Usando BV , obtm-se s cmB OVB/ 7 , 355 , 30 ,
12544= = = e Usando o centro 26, e V26 diretamente, obtm-ses cm VC/
5 , 120 = , pois as mesmas so paralelas e possuem o mesmo mdulo e
direo. b) Soluo pelo mtodo dos polgonos: -Aplicando as equaes a
partir da velocidade inicial:cm/s; 288 A O = V2 2 A2= e +B O VA O
VB O VV V = V4 A4A22 A24 A4A4A2 A2 A4//onde ; Medindo-se no Polgono
(Fig. 3.18), VA4 = 272,65 cm/s Fig. 3.18 Mtodo dos polgonos. Logo,
obtm-se VB da relao: s cmA O B O/ 0 , 12563 , 765 , 2725 , 34 4= =
=BB A4 BVV V V Temos ento a relao: s radB OVB/ 7 , 355 , 3125,044=
= = e Sendo assim, encontra-se Vc: +BC VB O VVV V = VCB4 BCCB B
Chorizontal //onde ; Medindo-se no Polgono, VC = 120,50 cm/s. Notas
de Aulas de MECANISMOS 2012.1 Professor Antonio Almeida Silva
(UFCG/CCT/UAEM) 37 Tabela de Resultados VELOCIDADES LINEARES (cm/s)
VA2288,00VA4 272,65VA4A2 93,78VB 125,00VC 120,50VCB 75,60VELOCIDADE
ANGULAR (rad/s) 4 35,7 ATIVIDADES DE PROJETO - ANLISE CINEMTICA
(P2)
Paraomecanismocompostodebarrasarticuladasecursorhorizontal,mostradonafigura
abaixo, a manivela 2 gira no sentido anti-horrio com velocidade
angular constante de 100 rpm. a) Determine as velocidades absolutas
nos pontos A, B, C, D e angulares 3, 5 e 6 pelos mtodos da Composio
e decomposio e Centros instantneos de rotao (7 pontos); b)
Determine a posioe velocidade absoluta do cursorBe do ponto
acoplador C por um mtodo analtico e compare os resultados com os
mtodos grficos (3 pontos); Dados:02A=3,5; AB=15; AC=7,0; BC=10;
CD=06D=8,0; 0206=9,0 cm; 2=5, 10, ..., 360. Obs: Entregar as
pranchas at o dia 02/04/2012. e2 D A O2 C 2o O6 B 3 4 5 6















![Aulas Mecanismos - Parte II[1]](https://img.document.onl/doc/110x75/54e45a264a7959c3668b4c68/aulas-mecanismos-parte-ii1.jpg)