Embed Size (px)
Citation preview

CA2COD1: COD
CONTROLE DIGITAL
Profa. Mariana Cavalca

Currículo Resumido • Curso Técnico em Eletro-Eletrônica – ETEP (São José dos Campos - SP)
• Iniciação científica (estatística)
• Estágio – Empresa ITA júnior: microcontroladores.
• Engenharia de Controle e Automação – Unifei (Itajubá – SP)
• Monitoria de Física
• Iniciação científica e Trabalho de Diploma (PDI e Visão Computacional)
• Estágio – Citech – Sistemas Supervisórios, CLP, Banco de Dados
• Mestrado e Doutorado em Engenharia Eletrônica e Computação na área de Sistemas e
Controle – ITA (São José dos Campos - SP)
• Cargo de Professor Adjunto na UDESC desde Setembro de 2011. Membro do Grupo de
Controle do DEE.
• Principais áreas de Interesse: Teoria de Controle, Controle Preditivo, Controle Tolerante a
Falhas, Estimação Paramétrica, Desenvolvimento de Plantas Didáticas.
COD – Plano de Ensino Resumido
1. Análise de Sistemas em Tempo Discreto no Plano z;
2. Análise de Sistemas a Dados Amostrados no Plano z;
3. Controladores Digitais baseados em Controladores
Analógicos;
4. Projeto de Controladores Digitais no Plano z;
5. Projeto no Espaço de Estados;
6. Introdução ao Controle Ótimo de Sistemas.

COD – Livros Base PRINCIPAL
HEMERLY, Elder Moreira. Controle por computador de sistemas dinâmicos. 2. ed.
São Paulo: Blucher, 2000. 249 p.
OGATA, Katsuhiko. Discrete-time control systems. 2nd ed. New Jersey: Prentice-Hall,
1995. 745 p.
KIRK, Donald E. Optimal control theory: an introduction. Mineola, NY: Dover
Publications, 1970. 452 p.
COMPLEMENTAR
OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice
Hall do Brasil, 1982. 929
DORF, Richard C; BISHOP, Robert H. Sistemas de controle modernos. 11. ed. Rio de
Janeiro: LTC, 2011. 724 p.
NISE, Norman S. Engenharia de sistemas de controle. 6. ed. Rio de Janeiro: LTC,
2012. 745 p
OPPENHEIM, Alan V.; SCHAFER, Ronald W. Discrete-time signal processing. 3rd ed.
New Jersey: Pearson, 2010. 1108 p.
PETERSEN, Kaare B.; PEDERSEN, Michael S. The Matrix Cookbook. Versão: 15 de
Novembro de 2012. Disponível em:
http://www2.imm.dtu.dk/pubdb/views/edoc_download.php/3274/pdf/imm3274.pdf.
Acessado em: 30/01/2015.

COD - Avisos
Site (Plano de Ensino, Recados, Notas, Material de Aulas, Listas de Exercícios):
http://www.joinville.udesc.br/portal/professores/marianasantos/
Verifique o site regularmente!!!
Notas: Laboratório (25%, ver cronograma de datas no site!) +
Revisão de Notas: Até antes da próxima avaliação.
• Aproximações pré-exame: 69=70, 68 depende, <=67 Exame!
• Aproximações pós-exame: 48=49=50, 46 e 47 depende, <=45 Reprovado!
Pontualidade e Frequência
Para ser aprovado precisa de mínimo 75% de 90 horas/aula = 68 presenças!
Primeira Avaliação (25%) 24/03/2015
Segunda Avaliação (25%) 05/05/2015
Trabalho Final (25%) 30/06/2015
Exame Final 07/07/2015

CONTROLE DIGITAL Introdução aos Sistemas de Controle: Revisão
Baseado e Retirados de:
MAYA, Paulo Álvaro; LEONARDI, Fabrizio. Controle essencial. São Paulo: Pearson, 2011. OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall do Brasil, 1982. 929
Profa. Mariana Cavalca
1ºSem/2015

O que é controlar?

Capítulo 1: Introdução • Primeiro trabalho significativo: controlador de velocidade de
James Watt; • Década de 1940: Métodos baseados no diagrama de Bode
(resposta em frequência); • Década de 1950: Lugar das raízes; • 1960-1980: controle ótimo, controle adaptativo • 1980-hoje: controle robusto, controle baseado em
inteligência computacional, controle tolerante a falhas, etc...
Controle
Clássico
Controle
Moderno

Conceitos Necessários
1. Modelagem e Função de Transferência
2. Lógica de Diagramas de Bloco
3. Resposta de Sistemas de Primeira e Segunda Ordem
4. Critério de Routh
5. Erros Estacionários
6. Lugar das Raízes (LR)
7. Projeto de Controladores pelo Método do LR
8. Diagrama de Bode e de Nyquist
9. Modelagem no Espaço de Estados
10. Controlabilidade e Observabilidade
11. Alocação de polos e Observador de estados

Modelagem e Função de Transferência Função de Transferência:
Exemplo:
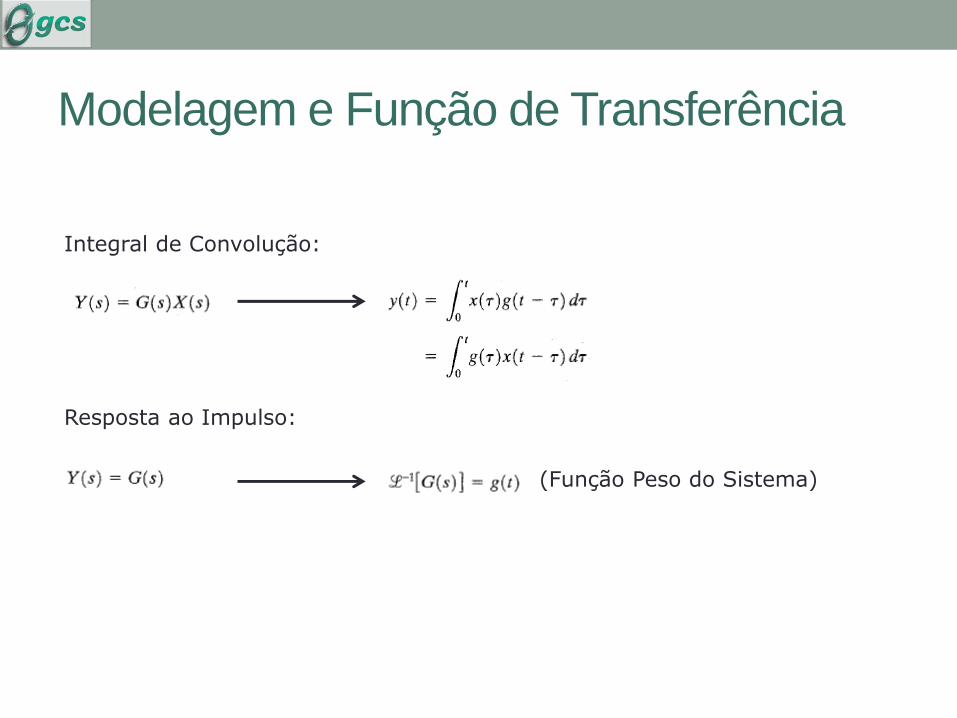
Modelagem e Função de Transferência
Integral de Convolução:
Resposta ao Impulso:
(Função Peso do Sistema)

Lógica de Diagramas de Bloco
Diagrama em Blocos:
Malha Fechada:

Sistema de Primeira Ordem
Tempo de
Acomodação: 3T
(5%) ou 4T (2%)
Tempo de Subida:
2,2T

Sistema de Segunda Ordem

Sistema de Segunda Ordem
• Sub – Amortecido
Mp em % !!!

Sistema de Segunda Ordem
-2 -1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Pole-Zero Map
Real Axis
Imag
inary
Axis
Wn
ξWn
Wd
β

Critério de Routh
• Consideremos um sistema genérico de ordem 𝑛 com o polinômio característico na seguinte forma:
• A condição preliminar para se aplicar o critério de Routh impõe que todos os coeficientes 𝑎𝑖 para 𝑖 = 0, 1, 2,…𝑛 sejam:
• Não nulos, e;
• Ou todos positivos;
• Ou todos negativos.
• Caso contrário o sistema é instável.

Critério de Routh
• Atendida a condição preliminar, montamos a seguinte
tabela:

Lugar das Raízes (LR) e Projeto pelo LR
𝐺 𝑠 =1
𝑠(𝑠 + 1)(𝑠 + 2)

Diagrama de Bode
• Os diagramas de Bode (de módulo e de fase) são uma
das formas de caracterizar sinais no domínio da
frequência.
Hendrik Wade Bode (1905-1982)
Sistema estável, linear e invariante no tempo

• Sendo 𝐺(𝑠) a função de transferência de um sistema
qualquer, pela transformada de Laplace temos:
𝑥 𝑡 = Xsen ω𝑡 → ℒ(𝑥 𝑡 ) → 𝑋 𝑠 =𝜔𝑋
𝑠2 + 𝜔2
𝐺 𝑠 = 𝑌(𝑠)
𝑋(𝑠)→ 𝑌 𝑠 = 𝐺 𝑠 𝑋 𝑠 = 𝐺 𝑠
𝜔𝑋
𝑠2 + 𝜔2
𝑌 𝑠 = 𝐺 𝑠𝜔𝑋
𝑠 − 𝑗𝜔 𝑠 + 𝑗𝜔
𝑌(𝑠) =𝐴
𝑠 + 𝑎+
𝐵
𝑠 + 𝑏+ ⋯ +
𝐶1
𝑠 − 𝑗𝜔+
𝐶2
𝑠 + 𝑗𝜔
𝑌 𝑠 = 𝑌𝐿 𝑠 + 𝑌𝐹 𝑠 → ℒ−1(𝑌 𝑠 ) → 𝑦 𝑡 = 𝑦𝐿 𝑡 + 𝑦𝐹 𝑡
Função Senoidal de Transferência

• Como estamos interessados apenas na resposta em regime
permanente, ou seja, apenas na resposta forçada, temos:
𝑌𝐹 𝑠 =𝐶1
𝑠 − 𝑗𝜔+
𝐶2
𝑠 + 𝑗𝜔
𝐶1 = 𝑌(𝑠)(𝑠 − 𝑗𝜔) 𝑠=𝑗𝜔 = 𝐺(𝑠)𝜔𝑋
𝑠 + 𝑗𝜔𝑠=𝑗𝜔
=𝑋
2𝑗𝐺(𝑗𝜔)
𝐶2 = 𝑌(𝑠)(𝑠 + 𝑗𝜔) 𝑠=−𝑗𝜔 = 𝐺(𝑠)𝜔𝑋
𝑠 − 𝑗𝜔𝑠=−𝑗𝜔
=𝑋
2𝑗𝐺(−𝑗𝜔)
Função Senoidal de Transferência

• Visto que 𝐺(𝑗𝜔) é um elemento complexo, podemos escrever:
𝐶1 =𝑋
2𝑗𝐺(𝑗𝜔) 𝑒𝑗𝜙 𝐶2 =
𝑋
2𝑗𝐺(𝑗𝜔) 𝑒−𝑗𝜙
𝑌𝐹 𝑠 =𝑋
2𝑗𝐺(𝑗𝜔)
𝑒𝑗𝜙
𝑠 − 𝑗𝜔+
𝑒−𝑗𝜙
𝑠 + 𝑗𝜔
• Retornando ao domínio do tempo:
𝑦𝐹 𝑡 =𝑋
2𝑗𝐺(𝑗𝜔) 𝑒𝑗(𝜔𝑡+𝜙) + 𝑒−𝑗(𝜔𝑡+𝜙)
𝑦𝐹 𝑡 = 𝑋 𝐺(𝑗𝜔) sen(𝜔𝑡 + 𝜙) 𝑌 = 𝑋 𝐺(𝑗𝜔) 𝜃 = 𝜙
Função Senoidal de Transferência

Função Senoidal de Transferência

Diagrama de Bode de funções de transferências básicas
• Função de transferência constante:

Diagrama de Bode de funções de transferências básicas
• Função de transferência com um polo/zero na origem

• Função com um polo real fora da origem 𝐺 𝑠 =𝑎
𝑠+𝑎=
1
𝜏𝑠+1,
𝑎 > 0.
Diagrama de Bode de funções de transferências básicas

• Função com um zero real fora da origem 𝐺 𝑠 =𝑠+𝑏
𝑏, 𝑏 > 0.
Diagrama de Bode de funções de transferências básicas

• Função com um polo e um zero 𝐺 𝑠 =1+𝑠
𝑏
1+𝑠𝑎 =
1+𝑠40
1+𝑠10
,
𝑎, 𝑏 > 0. . .
Diagrama de Bode de funções de transferências básicas

Diagrama de Bode de funções de transferências básicas
• Regras de Esboço

Diagrama de Bode de funções de transferências básicas
• Regras de Esboço

Diagrama de Bode de funções de transferências básicas
• Sistemas com polos complexo conjugados

Diagrama de Bode de funções de transferências básicas
• Sistemas com polos complexo conjugados

Diagrama de Bode de funções de transferências básicas
• Sistemas de fase mínima e não-mínima: são sistemas de fase
mínima aqueles que não possuem singularidades (polos? e zeros) no
semi-plano direito (SPD) do plano s.

Zero no SPD

Polo no SPD* Não faz sentido – Instável!

Tipo do sistema x curva de módulo e de fase
• Os coeficientes de erro estático de posição, velocidade e
aceleração descrevem o comportamento em baixa
frequência de sistemas tipo 0 (sem polos na origem), tipo
1 e tipo 2, respectivamente.
• O tipo do sistema determina a inclinação da curva de
módulo em baixas frequências. Portanto, a informação
relativa à existência e amplitude do erro em regime
estacionário de um sistema de controle, para uma dada
entrada, pode ser determinada a partir da observação da
região de baixa frequência na curva de módulo do
diagrama de Bode.

Constante de erro estático de posição
• Em um sistema do tipo 0:

Constante de erro estático de velocidade
• Em um sistema do tipo 1:
A intersecção do
seguimento inicial de -
20dB/dec com a reta de
0dB é igual a Kv.

Constante de erro estático de aceleração
• Em um sistema do tipo 2:
A intersecção do
seguimento inicial de -
40dB/dec com a reta de
0dB é igual a raiz quadrada
de Ka.

Análise de estabilidade pelo Diagrama de Bode
• O gráfico de Bode de uma função de transferência é uma ferramenta muito
útil para análise e projeto de sistemas de controle lineares.
• Vantagem: Na ausência de um computador, o diagrama de Bode pode ser
obtido, de forma aproximada, através de suas propriedades assintóticas.
• Desvantagem: Estabilidade absoluta e relativa podem ser determinadas
através do diagrama de Bode somente para sistemas de fase mínima*.
* Fase mínima – sem polos ou zeros no semi-plano direito.

Diagrama de Nyquist

Exemplo Verifique pelo critério de estabilidade de Nyquist, se a seguinte malha de controle é estável:
3. 𝑁 = −1 e 𝑃 = 1 𝑠1,2 = −1; 0,5
4. Portanto Z = 𝑁 + 𝑃 = 0 (Estável !)
-2 -1.5 -1 -0.5 0-0.5
0
0.5
Nyquist Diagram
Real Axis
Imagin
ary
Axis

Estabilidade Relativa
• Seja o seguinte sistema 𝐺 𝑠 =𝐾
𝑠 𝑠+1 (𝑠+5). O Diagrama de Nyquist e
a resposta ao degrau unitário da malha fechada com realimentação
unitária negativa para diversos valores de K são dados por:
-2.5 -2 -1.5 -1 -0.5 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Nyquist Diagram
Real Axis
Imagin
ary
Axis
K=0.1
K=0.5
K=0.75
K=1
0 5 10 15 20 25 30 35 40 45-4
-3
-2
-1
0
1
2
3
4
Step Response
Time (sec)
Am
plit
ude
K=0.1
K=0.5
K=0.75
K=1

Estabilidade Relativa: Margem de Ganho
• Supondo a planta estável em malha aberta (P = 0), a
margem de ganho é dada por:
• O sistema é estável em malha fechada se 𝑀𝐺 > 1, ou
seja 𝐺 𝜔𝑐 𝐻(𝜔𝑐) < 1.
𝑀𝐺 =1
𝐺 𝜔𝑐 𝐻(𝜔𝑐)

Estabilidade Relativa: Margem de Fase
• Supondo a planta estável em malha aberta (P=0), a
margem de fase é dada por:
• O sistema é estável em malha fechada se 𝑀𝐹 > 1.
𝑀𝐹 = 180 − 𝐺 𝜔𝑐′ 𝐻(𝜔𝑐′)

Estabilidade Relativa: Diagrama de Bode Vale apenas para sistema de fase mínima. Obs. Verificamos as margens no
Bode de malha aberta! As margens nos mostram estabilidade de malha
fechada!

Exemplo
• Seja a seguinte malha de controle:
a) Obter os valores das margens de fase e de ganho para K=10 a partir
do diagrama de Bode. Tal sistema é estável em malha fechada?
-100
-80
-60
-40
-20
0
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Gm = 9.9 dB (at 2.5 rad/sec) , Pm = 36.7 deg (at 1.54 rad/sec)
Frequency (rad/sec)

Serão revisados posteriormente:
1. Modelagem no Espaço de Estados
2. Controlabilidade e Observabilidade
3. Alocação de polos e Observador de estados

Mecânica
Eletrônica
Controle
Computação
A
dapta
do d
e w
ww
.mecatr
onic
aatu
al.com
.br
CAD/CAM Eletromecânica
Circuitos de Controle
CASCD

51
Mecânica
Eletrônica
Controle
Computação Simulação
Modelagem de Sistemas
Instrumentação
Controle Digital
Engenharia de
Controle e Automação

Controle Digital
POR QUÊ?
1. Exatidão;
2. Precisão;
3. Flexibilidade;
4. Velocidade;
5. Custo.

Estrutura Básica de um Controle Digital

Exemplos

Exemplos

Exemplos

CA2COD1: COD
CONTROLE DIGITAL Bom estudo!
Profa. Mariana Cavalca





























