Embed Size (px)
Citation preview

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1025
CALIBRACAO DE ACELEROMETROS UTILIZANDO UM ROBO MANIPULADORINDUSTRIAL
Lucas E. R. Silva∗, Leonardo A. B. Torres∗, Guilherme A. S. Pereira∗
∗Grupo de Pesquisa e Desenvolvimento de Veıculos Autonomos – PDVAEscola de Engenharia, Universidade Federal de Minas Gerais
Belo Horizonte, MG, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract— This paper presents and discuss the implementation of a previous published technique designedto calibrate acelerometers using manipulator robots. The paper contribution is not related to the techique itself,but on its presentation in a tutorial way and also on the discussion related to the practical implemetation ofthe method in a different setup. In the paper we present experiments where we calibrate the accelerometers ofin-house-built inertial measurement unit (IMU) using an industrial, 6-degree-of-fredom robot.
Keywords— sensor calibration, accelerometer, IMU, industrial robots
Resumo— Este artigo apresenta e discute a implementacao de um tecnica previamente publicada na literaturapara calibracao de acelerometros utilizando robos manipuladores. A contribuicao do artigo nao esta relacionadacom a tecnica propriamente dita, mas em uma apresentacao tutorial da mesma e na discussao relacionada aimplementacao pratica do metodo em um sistema diferente daquele utilizado no artigo original. Neste artigo saoapresentados resultados experimentais de calibracao de uma unidade de medicao inercial (IMU ) utilizando ummanipulador industrial de 6 graus de liberdade.
Palavras-chave— calibracao de sensores, acelerometro, IMU, robos industriais
1 Introducao
O trabalho apresentado neste artigo e parte deum projeto mais amplo que visa o desenvolvi-mento e a avaliacao de sistemas de medicao iner-cial (IMU, do ingles Inertial Measurement Unit)para aplicacao em veıculos aereos tripulados ounao tripulados. Geralmente, uma IMU e um ins-trumento de medicao que possui tres acelerome-tros, que sao montados sobre eixos ortogonais, etres girometros, tambem montados desta forma.Podem ainda compor o sistema magnetometros ereceptores GPS (Global Positioning System). Oprocessamento da informacao destes sensores coma utilizacao de algoritmos de fusao sensorial per-mite entao a estimativa da atitude do veıculo aereoao qual a IMU encontra-se montada.
Este artigo trata da calibracao dos acelerome-tros de uma unidade de medicao inercial. Foi im-plementada a ideia apresentada em (Renk et al.,2005), que utiliza um manipulador robotico antro-pomorfico para calibrar tais sensores.
A calibracao de um sensor, no contexto desteartigo, envolve descobrir a relacao estatica entrea variavel observada e a variavel de entrada. Emgeral, esta relacao e dada por:
f(x) = k0 + k1x , (1)
onde x e a variavel de entrada a ser medida,f(x) e a tensao de saıda do sensor, k0 e o valordo offset, k1 e o coeficiente de proporcionalidadeque determina a sensibilidade do sensor. Na lite-ratura, a calibracao de sensores e normalmentefeita aplicando-se metodos de otimizacao a umconjunto de dados coletados usando o sensor, de
forma a definir os parametros mais apropriadospara a Equacao (1), reduzindo assim os efeitos deperturbacoes aleatorias na medicao e no processode teste, por meio da minimizacao do erro quadra-tico medio entre a reta ajustada e os dados cole-tados. Em alguns sistemas que utilizam nao ape-nas um mas um conjunto de sensores acoplados(tal como a IMU, que utiliza tres acelerometrose tres girometros), aparecem alguns fatores com-plicadores do processo de calibracao, tais como anecessidade de um alinhamento perfeito entre ossensores envolvidos ou a estimacao de possıveisdesalinhamentos, como e considerado em (Renket al., 2005).
Alguns trabalhos relacionados a calibracao deacelerometros podem ser encontrados na litera-tura. Em (Xiaoxiong et al., 2008), desenvolve-seum metodo de calibracao, chamado de “alta pre-cisao” pelos autores, para dois acelerometros orto-gonais que elimina o efeito de erros no posiciona-mento angular relativo entre os sensores por meiodo uso de uma mesa de calibracao de dois eixos.Neste mesmo artigo, analisa-se a correlacao entreos coeficientes do modelo obtido e conclui-se queo desvio padrao na identificacao de dois acelero-metros, em conjunto, e menor que o desvio padraona identificacao de um unico acelerometro. Os au-tores de (Zhou et al., 2009) utilizam uma centrı-fuga para os testes de um acelerometro, fazendoa aceleracao variar de −55g a +55g, com incre-mentos de 5g. Para calibracao dos dados de teste,eles aplicam, primeiramente, o metodo de mıni-mos quadrados e, em seguida, algoritmos geneti-cos. Esse artigo menciona que a vantagem de seutilizar mınimos quadrados e a distribuicao relati-

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1026
vamente uniforme do erro residual, e usualmentea pequena soma dos erros. Entretanto, concluemque algoritmos geneticos sao mais indicados vistoque os erros residuais nos parametros se dispersamcom maior uniformidade.
No artigo (Renk et al., 2005), que motivoua realizacao do presente trabalho, utiliza-se ummanipulador robotico de seis graus de liberdadepara calibrar um conjunto de tres acelerometros etres magnetometros. Os testes incluem submetero equipamento a ser calibrado, que esta afixado aponta do manipulador, a diversos movimentos derolamento, arfagem e guinada (rotacoes em tornodos eixos x, y e z, respectivamente) que sejamsuficientemente lentos de forma que a unica ace-leracao considerada nos acelerometros e a propriagravidade. A calibracao dos grupos de sensores efeita, entao, a partir dos milhares de pontos cap-turados e de algoritmos de mınimos quadrados. Ametodologia aplicada permite efetuar a calibracaomesmo quando nao se pode assumir ortogonali-dade perfeita entre os grupos de sensores.
Neste artigo, utiliza-se a metodologia de(Renk et al., 2005) para calibrar acelerometrosmontados em eixos ortogonais. O foco do artigo,entretanto, e discutir os problemas decorrentes daimplementacao pratica e analisar a viabilidade, asvantagens e a eficacia da tecnica de calibracao pro-posta. Aborda-se aqui alguns temas nao tratadospelos autores do artigo, tais como a sincronizacaodos sinais advindos do robo e dos acelerometros eos metodos de otimizacao utilizados. A proximasecao descreve a metodologia de calibracao usandoum robo manipulador.
2 Metodologia
2.1 Modelagem Matematica
Seja o subscrito b indicativo do sistema de coorde-nadas da base do robo, o subscrito e indicativo dosistema de coordenadas de sua garra (end effector)e o subscrito i indicativo do sistema de coordena-das associado ao elo i do manipulador. Os vetoresunitarios que descreverao cada um destes sistemasde coordenadas serao ie
jeke
, ibjbkb
, iijiki
;
onde i varia de 1 a n, sendo n o numero de grausde liberdade do robo utilizado. Assume-se queo sistema de coordenadas da base esta localizadona origem de um sistema de coordenadas inerciale que todos os movimentos serao suficientementelentos e executados com velocidade constante, deforma que a unica aceleracao percebida pelos ace-lerometros presos a garra do robo e a gravidade.Assim, seja ~g o vetor gravitacional, que, na basedo robo, e definido como ~gb = [gx gy gz]T .
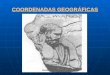
Figura 1: Rotacoes que definem os erros de ali-nhamento do acelerometro k = 1.
Cada acelerometro mede um componente es-calar do vetor gravitacional na direcao do seu eixo(referido por um vetor de orientacao em relacao aosistema de coordenadas da garra). O vetor de ori-entacao do k-esimo acelerometro (k = 1,2,3) emrelacao ao sistema de coordenadas da garra, Pke
,pode ser obtido por meio de rotacoes especıficasdo mesmo vetor unitario ie para cada caso. Parase determinar o vetor Pke deve-se girar ie de umangulo βk em torno do eixo je, seguida de uma ro-tacao de γk em torno do eixo ke, conforme pode servisualizado na Figura 1. Matematicamente tem-seos vetores unitarios resultantes:
Pke(βk,γk) = Rk(γk)Rj(βk )ie , (2)
sendo que a dependencia dos vetores unitarios dosangulos de desalinhamento βk e γk e determinadapelas matrizes de rotacao
Rj(βk) =
cosβk 0 sinβk0 1 0
− sinβk 0 cosβk
.e
Rk(γk) =
cos γk − sin γk 0sin γk cos γk 0
0 0 1
.Para representar Pke
no sistema de coordena-das da base, deve-se conhecer a matriz de rotacaoRe
b entre o sistema de coordenadas da garra e o sis-tema de coordenadas da base. Esta matriz e partedo modelo cinematico do manipulador e pode seranaliticamente obtida com o auxilio da metodolo-gia de Denavit e Hartemberg (Craig, 2005). As-sim, o vetor de orientacao Pke pode ser expressono sistema de coordenadas da base como
Pkb= Re
bPke . (3)
O sinal medido Vk associado ao acelerometrok e dado por
Vk = Skak + δk, (4)
onde Sk e a sensibilidade, δk e o offset e ak e acomponente da aceleracao na direcao do eixo do k-esimo acelerometro. Desde que a unica aceleracao

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1027
medida pelos acelerometros e devido a gravidade,a componente da gravidade medida pelo acelero-metro k sera igual a projecao da mesma sobre adirecao Pkb
:
ak = ~gTb Pkb. (5)
Logo, combinando as expressoes (3) a (5), o sinalmedido usando o acelerometro k sera dado por
Vk = Sk~gTb Pkb
+ δk = |~g|SkgTb Pkb
+ δk, (6)
em que gkbe o vetor gravidade normalizado.
Sejam φ e ψ, respectivamente, os angulos deinclinacao da base do robo em relacao ao vetorgravidade, em torno dos eixos jb e kb. Similar-mente ao que foi feito para o desalinhamento dosacelerometros em relacao a garra do robo, tem-seentao que o vetor gravidade normalizado relativoa base do robo sera dado por
gb = Rk(ψ)Rj(φ)g, (7)
em que g = [0 0 1]T .Substituindo a Equacao (2), (3) e (7) em (6),
obtem-se
Vk = |~g|Sk
[Rk(ψ)Rj(φ)g
]T[Re
bRk(γk)Rj(βk )ie]
+ δk,
⇒ Vk ≡ Vk(φ,ψ,βk,γk,Sk,δk,R
eb ,|~g|
).
(8)
A Equacao (8) relaciona a saıda do acelerometrok, para um ganho Sk e offset δk, com a aceleracaoa que ele esta sujeito devido a orientacao da garra(Re
b) e ao desalinhamento total (φ,ψ,βk e γk). Aideia da metodologia de calibracao e mover o robopara diversas configuracoes conhecidas, coletar osdados medidos pelo acelerometro e pelos propriossensores do robo e usar estes dados para identifi-car os parametros desconhecidos da Equacao (8).Observe que, nesta equacao, os parametros de Re
b
dependem apenas da geometria do robo e das con-figuracoes correntes das juntas; e |~g| sera apro-
ximadamente 9,8 m/s2. Dessa forma, restam os
angulos de ajuste φ e ψ do vetor gravidade, quedependem da instalacao do robo e da inclinacaodo piso onde este esta instalado, e ainda quatroparametros para serem estimados para cada ace-lerometro k: a sensibilidade Sk, o offset δk, e osangulos de desalinhamento γk e βk que dependemda forma de fixacao dos acelerometros ao robo.No caso da calibracao de mais de um acelerome-tro montado na mesma IMU, como e o caso nesteartigo, os angulos γk e βk fornecerao informacaosobre acoplamento cruzado entre as medicoes deaceleracao. Esta informacao pode, por exemplo,ser utilizada nos algoritmos de fusao sensorial paraevitar desvios nas estimativas de angulos. A se-guir apresentamos a metodologia utilizada paraidentificacao dos parametros do modelo.
2.2 Estimacao de parametros
Seguindo a metodologia em (Renk et al., 2005),para calibrar os acelerometros a partir de dados
coletados experimentalmente, formula-se dois pro-blemas de otimizacao de mınimos quadrados utili-zando a Equacao (8), a saber: (i) determinacao de18 parametros: φk ≈ φ, ψk ≈ ψ, βk, γk, Sk e δk,para cada acelerometro k = 1,2,3, utilizando se-paradamente as medicoes obtidas de cada sensor;e (ii) determinacao dos parametros φ e ψ, e dosoutros 12 parametros βk, γk, Sk e δk, k = 1,2,3,considerando todas as medicoes simultaneamente.
No primeiro problema objetiva-se determinarse os sensores apresentam problemas, ou se o mo-delo e inadequado, mediante a verificacao da con-sistencia da estimacao da direcao da gravidadepara cada acelerometro. Neste caso tem-se tresfuncoes de custo a serem minimizadas:
Jk(Sk, δk, γk, βk, φk, ψk) ≡n∑
j=1
{V jk − Vk
}2
, (9)
sendo k = 1, 2, 3; V jk a j-esima medicao do
k−esimo acelerometro; e Vk como expresso em (8).Ja no segundo problema de otimizacao tem-se, porsua vez, uma unica funcao de custo a ser minimi-zada, dada por:
J(S1, S2, S3, δ1, δ2, δ3, γ1, γ2, γ3, β1, β2,β3, φ, ψ) ≡3∑
k=1
Jk(Sk, δk, γk, βk, φ, ψ) (10)
onde Jk(·) e como na Equacao (9). Na proxima se-cao apresenta-se os experimentos realizados nestetrabalho.
3 Experimentos
3.1 Aparato experimental
O manipulador utilizado neste trabalho e um roboSmartSix, fabricado pela COMAU Robotics. Estee um manipulador industrial com 6 graus de liber-dade cuja programacao e realizada utilizando-sea linguagem proprietaria PDL2. Uma foto desterobo e mostrada na Figura 2.
Foi utilizada uma unidade de medicao inercialdesenvolvida na UFMG chamada de CEA-FDASu(ver Figura 3) que possui um acelerometro tria-xial, um girometro e um GPS. Esta e alimentadapor uma bateria de 12 volts e armazena em umamemoria flash os dados coletados (a uma taxa de20 Hz) em formato binario (10 bits). O acelero-metro triaxial, por sua vez, possui faixa de medi-cao de ±3,6g. O acelerometro possui sensibilidadeaxial cruzada (definida como o acoplamento entrequaisquer dois eixos) de ±1% e nao-linearidade de±0,3% do fundo de escala (medida como a razaoentre o desvio maximo da curva ideal e a entradamaxima).

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1028
Tabela 1: Parametros iniciais para a calibracao dos acelerometros (calibracao individual)Acel. k Sk(s
2/m) δk βk(◦) γk(
◦) φk(◦) ψk(
◦) ErroRMS
1 −10,0443 378,0278 48,4305 89,9170 89,5000 0,0380 0,1921
2 11,6429 504,5238 41,2791 272,0817 87,6875 1,2484 0,3809
3 −11,7563 517,9936 89,4760 0,8407 90,6289 0,4148 0,1499
Tabela 2: Parametros estimados para a calibracao dos acelerometros (calibracao individual)Acel. k Sk(s
2/m) δk βk(◦) γk(
◦) φk(◦) ψk(
◦) ErroRMS
1 −10,0611 378,0783 47,8944 90,5743 89,9938 −0,2088 0,1751
2 12,0632 505,7450 42,2072 270,7826 89,9754 −0,1590 0,1751
3 −11,7458 516,8527 90,4054 0,8079 89,9725 0,0398 0,0911
Figura 2: Manipulador robotico SmartSix, fabri-cado pela COMAU Robotics, usado neste traba-lho.
Figura 3: Unidade de medicao inercial CEA-FDASu.
3.2 Procedimento Experimental
No experimento realizado os acelerometros afixa-dos a garra do manipulador foram rotacionadosem rolamento, arfagem e guinada. A junta 1 dorobo foi girada θ1 graus em torno do eixo kb exe-cutando um movimento de guinada que variou de−160◦ a 160◦. Enquanto isso, a junta 5 foi ro-tacionada θ5 graus em arfagem em 10 ciclos quevariaram de −90◦ a 90◦ e de volta a −90◦. A junta6 girou θ6 graus em um movimento de rolamentoque variou de −2500◦ a 2500◦. Todas as rota-coes mencionadas sao efetuadas em torno do eixode coordenadas da propria junta. As medias de
velocidade para as juntas 1, 5 e 6 foram respecti-vamente 0,34◦/s, 1,92◦/s e 5,51◦/s. O movimentocompleto do robo durou aproximadamente 30 mi-nutos.
Enquanto o movimento ocorria, dados decerca de 35 mil orientacoes das juntas foram co-letados pelo manipulador a uma frequencia deamostragem media estimada de 19,9 Hz e desviopadrao de 0,2 Hz. Ao mesmo tempo, as leitu-ras da IMU foram armazenadas em seu cartaode memoria, tambem na frequencia de aproxima-damente 20 Hz. De fato, uma observacao deta-lhada dos dados revelou que o sinal da IMU es-tava hora atrasado, hora adiantado em relacaoao sinal obtido do robo, mas infelizmente nao ha-via uma base de tempo absoluta na IMU para sedeterminar a frequencia media e seu desvio pa-drao. De forma a reduzir os efeitos indesejadosde tal descompasso, optou-se por reamostrar ossinais dos acelerometros, que tinham um maiornumero de amostras, usando um filtro nao-causalanti-falseamento (passa-baixas) de ordem 10, an-tes de realizar a reamostragem.
Notou-se que, alem da flutuacao nas frequen-cias de amostragem, os dados coletados de ambasas fontes estavam dessincronizados entre si, vistoque cada leitura foi efetuada independentemente.De forma a tentar sincronizar as duas medidas, re-lacionando as posicoes das juntas as medidas dosacelerometros em cada instante de amostragem,efetuou-se o seguinte procedimento: com o mani-pulador parado, iniciou-se a coleta de dados norobo e nos acelerometros. Comandou-se, antes demais nada, uma mudanca rapida na atitude domanipulador e, em seguida, esse iniciou seu movi-mento lento. No final da trajetoria programada,executou-se outra mudanca rapida na atitude domanipulador e concluiu-se a coleta de dados. Pos-teriormente, no computador, transformou-se umvetor ideal da gravidade (que aponta no sentido de−kb e tem modulo 9,8m/s2) da base para a garrado robo em cada configuracao de junta coletada.O sinal obtido foi em seguida comparado as saı-das dos acelerometros, procurando sincronizar osmovimentos rapidos que iniciaram e terminaram omovimento. Naturalmente, tais sinais diferiam em

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1029
Tabela 3: Parametros iniciais para a calibracao dos acelerometros (calibracao simultanea)Acel. k Sk(s
2/m) δk βk(◦) γk(
◦) φ(◦) ψ(◦)
1 −11,5674 393,3344 51,8747 100,712384,0000 2,18322 10,8535 509,1909 25,1892 303,9624
3 −8,3273 517,1746 100,8133 8,7258
Tabela 4: Parametros estimados para a calibracao dos acelerometros (calibracao simultanea)Acel. k Sk(s
2/m) δk βk(◦) γk(
◦) φ(◦) ψ(◦)
1 −10,0612 378,0768 47,9410 89,438589,9633 −0,11002 12,0630 505,7460 42,1860 270,7834
3 −11,7457 516,8144 89,5959 0,8106
polarizacao e sensibilidade, alem de que o sinal dagravidade transformado da base para a garra naolevava em consideracao o eventual desalinhamentoentre os tres acelerometros e entre a gravidade e osistema de coordenadas da base do robo. Tais si-nais, entretanto, foram suficientes para se efetuaro sincronismo de inıcio do movimento. Concluıdaessa etapa, removeu-se as faixas de dados que in-cluiam os movimentos rapidos, deixando somentea trajetoria lenta, que era necessaria para a meto-dologia.
3.3 Resultados
Para todos os experimentos descritos a seguir, oseguinte procedimento foi adotado para otimiza-cao dos parametros: para se determinar uma solu-cao inicial viavel proxima ao mınimo global, usou-se um algoritmo genetico implementado na fun-cao ga do programa MATLAB). Empiricamenteescolheu-se uma populacao de 20 indivıduos e li-mite de 10 mil geracoes para esta etapa. Emseguida, utilizou-se o metodo de Quasi-Newton(funcao fmincon do MATLAB) para alcancar o
mınimo global. E importante observar que as es-colhas relativas aos algoritmos de otimizacao a se-rem utilizados nao foram baseadas no trabalhode Renk et al. (2005), uma vez que esta infor-macao nao esta disponıvel. Observa-se ainda queem todos processos de otimizacao foram incorpo-radas as seguintes restricoes: φk ∈ (80◦; 100◦);ψk ∈ (−10◦; 10◦); βk, γk ∈ (0◦; 360◦).
Inicialmente os acelerometros foram calibra-dos individualmente (Equacao (9)). Com a utili-zacao de algoritmos geneticos, obteve-se os valoresmostrados na Tabela 1. A partir desses valores,usando o metodo de Quasi-Newton encontrou-seos parametros mostrados na Tabela 2. O valor deerro presente nessas duas tabelas equivale a raizquadrada do erro quadratico medio, em m/s2.
Alem da calibracao individual dos acelerome-tros, foi tambem executada a calibracao simulta-nea por meio da Equacao (10). A Tabela 3 mostraos parametros iniciais obtidos por meio de algorit-mos geneticos. A Tabela 4, por sua vez, mostra osparametros de calibracao otimos obtidos via me-
todo Quasi-Newton.
3.4 Analise dos Resultados
Observa-se que os valores estimados por meio dosproblemas de calibracao individual e de calibracaosimultanea sao bastante proximos, evidenciando ofato de que o modelo de otimizacao e consistente.
Usando-se a serie de valores de erro residu-ais (sendo que o j-esimo erro residual e igual
a(V jk − Vk
)avaliado usando os parametros oti-
mos obtidos), foram obtidos histogramas similaresaquele mostrado na Figura 4. Os resıduos advem,a princıpio, principalmente, de sinais de ruıdo nasaıda dos acelerometros, de pequenas oscilacoesmecanicas do manipulador, de incertezas na taxade amostragem e de falta de sincronismo perfeitoentre os sinais, de erros de modelagem do manipu-lador, alem de erros na especificacao e otimizacaodos parametros, etc. Uma analise da dispersaoassociada a um dado histograma de erros podeajudar o usuario a escolher o melhor conjunto deparametros a ser utilizado, em relacao a precisaoda medicao (precisao aqui considerada como a in-certeza no valor verdadeiro do mensurando, a qualse manifesta como dispersao dos valores indicadanos histogramas correspondentes). Neste traba-lho, por exemplo, esta analise levou a definicao deque os parametros de calibracao utilizados seraoaqueles obtidos no processo de calibracao indivi-dual dos acelerometros. Os parametros relaciona-dos a gravidade, no entanto, serao aqueles obtidosna calibracao simultanea. Salienta-se que tal esco-lha, em que se combina os melhores resultados decada etapa, nao conduz necessariamente ao me-lhor resultado possıvel em termos de reducao daincerteza na medicao.
Como forma de validar os parametros de ca-libracao encontrados, utilizou-se um segundo con-junto de dados correspondente ao mesmo movi-mento executado anteriormente, mas realizado emvelocidades cerca de vinte vezes maiores. Nessecaso, as aceleracoes devidas ao proprio movimentoda garra nao sao mais desprezıveis. A Figura 5mostra o sinal do acelerometro 1, e o sinal geradousando-se os parametros estimados e a Equacao

X SBAI – Simpósio Brasileiro de Automação Inteligente18 a 21 de setembro de 2011São João del-Rei - MG - Brasil
ISSN: 2175-8905 - Vol. X 1030
Figura 4: Histograma do erro na estimacao dosparametros para o acelerometro 1.
Figura 5: Validacao dos parametros estimadospara o acelerometro 1.
(8). Os valores de raiz quadrada do erro medioquadratico entre estes sinais para os acelerometros1, 2 e 3 foram respectivamente 1,7123 m/s2, 1,6831m/s2 e 0,8461 m/s2. Observa-se, nesse caso, faltade sincronismo entre os sinais das juntas e os sinaisdos acelerometros, o que aumenta o erro. Pode-se, entretanto, notar a similaridade dos sinais, quediferem basicamente por atrasos de tempo.
4 Conclusoes e trabalhos futuros
Este artigo mostrou a implementacao de uma tec-nica proposta na literatura para calibracao de ace-lerometros com o uso de um manipulador robo-tico industrial. A principal vantagem da tecnicaadvem da propria utilizacao do manipulador, quepode ser mais facilmente encontrado em univer-sidades e centros de pesquisa do que mesas decalibracao desenvolvidas especialmente para estefim. No entanto, algumas perguntas ainda devemser respondidas relativas ao assunto. Uma delase o fato de que a matriz de rotacao do robo, Re
b ,e considerada pela metodologia como sendo com-pletamente conhecida. No entanto, esta matriz
depende dos parametros cinematicos do robo, quealem de suas dimensoes, incluem tambem os va-lores de angulos das juntas, obtidos por meio desensores, que por sua vez tambem precisam ser ca-librados. Assim, e necessario um estudo aprofun-dado sobre a influencia da incerteza de Re
b sobreo resultado da calibracao.
Os resultados deste trabalho foram fortementeinfluenciados pela falta de sincronizacao entre osdados. Esta e uma dificuldade comumente encon-trada, uma vez que parte dos dados deve ser ad-quirida por meio de um sistema proprietario quefaz parte do robo. Uma solucao aparente e utili-zar bibliotecas que abrem o sistema do robo paraque este seja programado por meio de linguagensde alto nıvel. No caso do robo COMAU utilizadoneste trabalho, sera, em trabalhos futuros, utili-zada a biblioteca C4G Open, que opera sobre umsistema operacional de tempo real. Infelizmente,nem todas as marcas de robos comerciais possuembibliotecas similares a esta, o que pode dificultara reproducao do sistema de calibracao.
Agradecimentos
Reconhecimento especial pela apoio na realizacaodeste trabalho e feito ao doutorando Antonio Ra-fael da Silva Filho (CEA/UFMG).
Os autores agradecem o suporte financeiro daFundacao de Amparo a Pesquisa do Estado de Mi-nas Gerais – FAPEMIG, sem o qual a realizacaodeste trabalho nao teria sido possıvel.
Leonardo A. B. Torres e Guilherme A. S. Pe-reira sao bolsistas do Conselho Nacional de De-senvolvimento Cientıfico e Tecnologico – CNPq.
Referencias
Craig, J. J. (2005). Introduction to Robotics: Me-chanics and Control, Pearson Prentice Hall.
Renk, E. L., Collins, W., Rizzo, M., Lee, F. andBernstein, D. S. (2005). Calibrating a triaxialaccelerometer-magnetometer, IEEE ControlSystems Magazine pp. 86–95.
Xiaoxiong, J., Yu, L., Baoku, S. and Ming, L.(2008). Experimental investigation on cali-brating high precision accelerometer on two-axis table, Space Control and Inertial Tech-nology Research Center, Harbin Institute ofTechnology, Harbin, Heilongjiang, China .
Zhou, W., Li, B., He, X., Su, W. and Zhang, F.(2009). Calibration study of force-balancedmicro accelerometer based on least squaredmethod and genetic algorithm, Proceedingsof the 2009 IEEE International Conferenceon Mechatronics and Automation pp. 1357–1361.