Embed Size (px)
Citation preview

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Cap. 5. Comportamento mecânico dos materiais
1. Justificação da existência das relações constitutivas
2. Linearidade física e Lei de Hooke
3. Definição de constantes elásticas
3.1 Módulo de Young
3.2 Efeito de Poisson
3.3 Módulo de corte (distorção)
3.4 Módulo de volume
4. Definições ligadas ao comportamento do material
5. Materiais homogéneos isotrópicos em análise linear
5.1 Lei de Hook generalizada
5.2 Composição da matriz de rigidez e de flexibilidade
6. Separação das partes volúmicas e desviatóricas
7. Estados planos
7.1 Tensão plana
7.2 Deformação plana
8. Carga de temperatura
8.1 Carga de temperatura em estados planos
9. Materiais ortotrópicos
10. Outras designações para comportamento mais geral dos meios contínuos
10.1 Cedência
10.2 Modelos para o cálculo

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1. Justificação da existência das relações
constitutivas
Explicou-se nos capítulos anteriores que a resposta do Meio Contínuo ao carregamento exprime-
se via três campos, dois campos tensoriais de 2ª ordem: tensão e deformação; e um campo
vectorial: deslocamento. Visto que os campos tensoriais são simétricos, justificou-se, que a
descrição das componentes na forma vectorial torna-se mais vantajosa, ou seja temos:
, , u
que no total corresponde a 6+6+3=15 componentes, funções incógnitas. Para as resolver é preciso
estabelecer também 15 equações. As equações definidas até agora são:
3 Equações de equilíbrio
0f
6 Equações deformação-deslocamento
T
u
Pode-se assim concluir que ainda faltam 6 equações. O significado destas equações é neste
momento óbvio, porque até agora não se definiu nenhuma ligação entre a tensão e a deformação
e nenhuma característica que assegurava que diferentes tipos de material respondem ao
carregamento de maneira diferente.
As 6 equações em falta chamam-se, equações constitutivas ou equações tensão-deformação e
identificam as relações entre as componentes de tensão e de deformação, de tal maneira que
envolvem certas características, que se chamam constantes ou parâmetros do material.
Do ponto de vista matemático, a ligação entre 2 tensores de 2ª ordem, têm que envolver um
tensor de 4ª ordem. O tensor de propriedades constitutivas é por isso de 4ª ordem. Neste caso, as
equações constitutivas só se poderiam escrever na forma indicial de Einstein, que não foi dada
nesta cadeira. A forma matricial seria impossível, porque implicava matriz em 4 dimensões. No
entanto, as componentes do tensor constitutivo exibem muitas simetrias que permitem reduzir o
número de componentes a 21, e assim colocar as componentes numa matriz simétrica 6x6.
2. Linearidade física e Lei de Hooke
As primeiras tentativas de estabelecer relações constitutivas, usaram ensaios simples. Um ensaio
típico desta gama de ensaios é ensaio de tracção de uma barra esbelta. Aplicando uma força de
tracção ao provete, assegura-se que o provete desenvolve componente normal de tensão na

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
direcção da força aplicada. Ao longo do ensaio regista-se o deslocamento que se transforma em
extensão. A força aplicada transfere-se em tensão normal. O gráfico destas entidades costuma ter
forma que se mostra na figura em baixo, pelo menos para a maior parte de metais. No eixo
vertical regista-se habitualmente a tensão nominal (convencional, de engenharia, sem levar em
conta as variações na área devido à carga aplicada, ou seja o chamado efeito Poisson, que será
explicado a seguir) e não a tensão real, ou seja, a força aplicada divide-se pela área de secção
transversal inicial e não instantânea (actual). Por isso o gráfico mostra uma parte decrescente,
mesmo quando a força aplicada está sempre a aumentar.
Figura - Ensaio uniaxial de tracção
O gráfico representado acima usa os seguintes termos:
Limite de linearidade: corresponde à tensão ao nível em que a recta inicial passa a ter forma de
uma curva. Ao declive da recta inicial atribuiu-se um significado particular definido como:
tan E
Em que E chama-se Módulo de elasticidade ou Módulo de Young.
Patamar de cedência: corresponde à tensão, ao nível em que a extensão começa a aumentar sem
aumento da força aplicada, o que corresponde à parte horizontal da curva do gráfico.
Tensão de rotura (ruptura): a máxima tensão no gráfico, no entanto a rotura (falta de integridade
de provete), ocorre no momento em que a monitorização está interrompida, ou seja no final da
curva.
Quando as análises envolvem tensões não muito elevadas, o comportamento do material
implementado corresponderá apenas à parte inicial do gráfico representado pela recta. Neste
caso, as análises chamam-se “fisicamente lineares”, ou seja devido da recta do gráfico a relação
tensão deformação é linear, o que no caso unidimensional representado pode-se escrever:
E
Patamar de cedência
Limite de linearidade
Tensão de rotura

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
ou
E
Esta relação chama-se Lei de Hooke.
O módulo de Young é uma medida de rigidez e material.
Um material mais rígido tem este modulo maisr, o que significa que para mesma deformação
sobre de maiores tensões
Figura
O inverso é uma medida de flexibilidade, o que para mesma tensão deformação maior
Figura.
Quando além da linearidade física as análises efectuam-se dentro do limite de deslocamentos
pequenos e consequentemente deformações pequenas, ou seja, dentro dos limites de linearidade
geométrica, as análises chamam-se lineares.
As análises lineares são as mais simples, no entanto abrangem uma gama de cálculos
suficientemente detalhados para dimensionamento de estruturas. As análises lineares têm uma
grande vantagem relativamente às não-lineares, que é a validade de princípio de sobreposição. Às
vezes, devido à grande utilidade deste princípio, admitem-se pressupostos de tal maneira para se
assegurar a linearidade do problema, com o objectivo de usufruir do princípio de sobreposição. No
caso de não-linearidade que é impossível evitar, admitem-se coeficientes correctivos no
dimensionamento estrutural para se manter aproximadamente a validade do princípio de
sobreposição.
O princípio de sobreposição permite sobrepor os efeitos de cargas distintas aplicadas a uma
estrutura e usar a proporcionalidade da resposta. Este princípio já foi utilizado na cadeira de
Estática. Significa que:
Tendo resposta ao carregamento 1 1P na forma de:
1 1 1, , u
e ao carregamento 2 2P na forma de:
2 2 2, , u
A resposta à combinação de carregamentos 1 2
P P

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
terá a forma de: 1 2 1 2 1 2
, , u u
3. Definição de constantes elásticas
3.1. Módulo de Young
Na análise fisicamente não-linear não é suficiente descrever o comportamento usando somente
um único módulo de Young. Distinguem-se por isso módulos tangentes e secantes. Os módulos
tangentes são declives das tangentes à curva tensão-deformação. O módulo tangente inicial é
declive da tangente que passa pela origem. Outros módulos tangentes têm que ter o nível de
tensão definido, depois traça-se uma tangente ao gráfico neste nível. Os módulos secantes têm
que ter dois níveis de tensão definidos. No caso do módulo secante inicial, um nível é suficiente
porque o outro representa nível zero. Estas dependências implicam, que o módulo de Young em
análise fisicamente não-linear depende do estado de tensão (ou de deformação) actual.
Figura - Módulos tangentes e secantes
3.2. Efeito de Poisson
Quando se descreveu a tensão nominal, chamou-se à atenção, que no ensaio unidimensional de
tracção de uma barra, a secção transversal diminui. Este efeito, chamado efeito de Poisson, foi
estabelecido muito mais tarde que a Lei de Hooke.
Efeito de Poisson é definido como o facto que durante a aplicação de carga numa direcção, as
dimensões nas direcções transversais (perpendiculares à direcção da carga aplicada) também
sofrem alterações. Seria de esperar que aplicando uma tracção, as dimensões na direcção da carga
aplicada aumentam e nas direcções transversais diminuam. Na aplicação de carga de compressão,
os efeitos são opostos. Para se poder quantificar este efeito, introduz-se o número ou o
coeficiente de Poisson, que se define como razão entre a extensão na direcção transversal à carga
e a extensão na direcção da força aplicada, juntando ainda o sinal negativo. Ou seja

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
y z
x x
admitindo que a força foi aplicada na direcção x .
Figura - Explicação do efeito de Poisson
Admitindo a distribuição das componentes de tensão e de deformação constantes (uniformes) no
provete da figura em cima, admitindo ainda que os efeitos transversais no lugar de encastramento
são desprezáveis e que a força aplicada pode ser substituída por uma carga estaticamente
equivalente e uniformemente distribuída sobre a secção transversal (princípio Saint-Venant que
será explicado no próximo capítulo), pode-se simplesmente escrever que
x
L
L
,
z
h
h
, z
x
Para uma força de tracção, 0L , 0h e por isso 0 .
Parece assim que o número de Poisson deveria ser sempre positivo. Mostrar-se-á ainda neste
capítulo que isso não é verdade. Parece também que a parte de volume acrescentada num lado
deveria ser retirada no outro lado, mas isso novamente não é verdade. Manter o volume
inalterado significa ter números de Poisson iguais a 1 em 2D, e 1/2 em 3D. Materiais com estas
propriedades chamam-se incompressíveis. Valor nulo do número de Poisson, significa que
aplicando força numa direcção, esta vai sofrer variações de comprimento, mas as dimensões
transversais manter-se-ão inalteradas.
3.3. Módulo de corte (distorção)
Da mesma maneira como se introduziu o ensaio de tracção, pode ser definido outro tipo de
ensaio, nomeadamente um ensaio de corte. Neste caso a carga aplicada tem que provocar no
provete somente a tensão de corte, mas no referencial considerado. Aplica-se assim uma força na
direcção tangencial à superfície sobre a qual se assume distribuição uniforme (princípio de Saint-
Venant).

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Figura - Esquema do ensaio de corte
Assim
F
Lb
Quando o material é suficientemente flexível, pode-se assumir que as arestas verticais após a
aplicação da carga mantêm-se rectas. Neste caso, os ângulos originalmente rectos nos planos
paralelos ao plano coordenado 0xy sofrem uma distorção no valor de
u
h
De modo similar ao ensaio de tracção, pode-se fazer o gráfico de tensão de corte versus distorção.
No caso do comportamento linear, o declive da recta do gráfico corresponde ao módulo de corte.
Figura – Gráfico tensão de corte-distorção (definição do módulo de corte)
G
Usando o referencial da figura, poder-se-ia escrever:
xy
xy
G
Ou seja, a relação entre as componentes de corte e as distorções, representa comportamento no
plano coordenado 0xy . Ao contrário do anterior ensaio unidimensional que referiu uma relação
na direcção da força aplicada, ou seja na direcção do eixo coordenado 0x .

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
No caso do comportamento não-linear, podem-se de modo similar, definir os módulos tangentes e
secantes. Estas dependências, implicam que o módulo de corte em análise fisicamente não-linear
depende do estado de tensão (ou de distorção) actual.
Visto que as componentes de deformação não têm unidade, a unidade do módulo de Young e de
corte, é igual à unidade de tensão, e o número de Poisson não tem unidade. No entanto, os
valores dos módulos costumam ser maiores que os valores comuns de tensões na prática de um
engenheiro civil, e por isso a unidade habitual que se usa é 9GPa 10 Pa . Os valores do módulo de
elasticidade referente à gama de materiais tipo aço são à volta de 200GPa e dos betões à volta de
30GPa.
3.3. Módulo de volume
Ainda se usa o módulo de volume K , que representa o inverso de deformação volúmica no caso
de solicitação, que corresponde à tensão volúmica unitária; a relação constitutiva neste caso é
3 m
V mK
e será deduzida em seguida.
Os módulos definidos até agora, ou seja de Young, de corte e de volume e o número de Poisson
chamam-se constantes elásticas do material.
4. Definições ligadas ao comportamento do material
Em análise linear os parâmetros de material não dependem do estado actual de tensão ou de
deformação. Bastava assim organizá-los dentro de uma matriz 6x6 para definir as equações
constitutivas.
C
D
1
C D
Nesta descrição C chama-se matriz de rigidez e D matriz de flexibilidade. Estas designações
são as mais antigas que foram usadas, mas não são únicas. Para matriz de rigidez usa-se também
E como generalização de designação do módulo de Young, ou K . Para matriz de flexibilidade
usa-se também C de “compliance” ou F de flexibilidade. Visto que a designação C pode
servir, quer para rigidez, quer para flexibilidade, é preciso ter cuidado e prestar atenção ao
significado e não à letra que a descreve.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Torna-se indispensável definir quantas constantes de material são precisas para descrever
correctamente a ligação entre as componentes de tensão e de deformação, para poder construir a
matriz de rigidez ou de flexibilidade, que são mutuamente inversas. Para isso é preciso introduzir
definições de tipos de material.
Em primeiro lugar é preciso distinguir os materiais em que as propriedades mudam ou não com a
posição. Define–se:
Material homogéneo: os parâmetros que descrevem o comportamento de um material
homogéneo não variam com a posição, ou seja, não são dependentes das coordenadas , ,x y z .
Como exemplos destes materiais podem-se mencionar metais. Outros exemplos dependem da
escala em que se faz a análise. Por exemplo, betão, solos e rochas considerados em escala grande
(dimensões em metros) são homogéneos. Em escalas mais pequenas (dimensões em centímetros
ou menores) nota-se estrutura do material composto de várias componentes e não é possível
considerá-los como materiais homogéneos.
Material heterogéneo: os parâmetros que descrevem o comportamento de um material
heterogéneo variam com a posição, ou seja, são dependentes das coordenadas , ,x y z . Um
exemplo típico é um compósito, que é um material constituído de várias fases de materiais
diferentes (associação de dois ou mais materiais).
As definições em cima não afectam o número dos parâmetros necessários para descrever o
comportamento, apenas estabelecem se estes parâmetros são dependentes da posição ou não. As
definições que são necessárias para estabelecer o número mínimo de parâmetros, são ligadas à
comparação de comportamento de um dado material em várias direcções. Define-se:
Material isotrópico: material que exibe comportamento igual em todas as direcções.
Material ortotrópico: material que exibe comportamento diferente em três direcções
mutuamente perpendiculares e os planos formados por estas direcções são planos de simetria.
Material anisotrópico: material que exibe comportamento diferente em cada direcção.
Caso típico de um material ortotrópico é, madeira, betão armado e compósitos reforçados por
fibras da maneira que é possível estabelecer os eixos de ortotropia. Materiais verdadeiramente
anisotrópicos não são muito comuns, e para a sua descrição precisavam de 21 constantes
diferentes. No entanto, pode-se comprovar que os materiais isotrópicos precisam para a sua
descrição apenas dois parâmetros. Como já foram definidos 4, podem-se escolher 2 e usá-los para
a construção de matrizes de rigidez ou de flexibilidade. Os restantes 2 parâmetros são
dependentes dos 2 já escolhidos. Na prática de engenharia civil, costumam-se escolher o módulo
de Young e o número de Poisson. As equações que descrevem as relações constitutivas, ou seja
equações tensão-deformação, chamam-se neste caso Lei de Hooke generalizada.
Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
5. Materiais homogéneos isotrópicos em análise
linear
5.1 Lei de Hook generalizada
Como foi dito anteriormente, neste caso a matriz de rigidez ou de flexibilidade pode ser construída
usando apenas duas constantes elásticas, que não dependem da posição devido à
homogeneidade. Devido à isotropia, a matriz de rigidez ou de flexibilidade é igual em cada
referencial e não é preciso de “calcular as componentes nos referenciais rodados” como no caso
de tensão ou de deformação.
Pode-se comprovar que as direcções principais de tensão e de deformação coincidem, inclusive a
ordem.
5.2 Composição da matriz de rigidez e de flexibilidade
Voltando às definições do número de Poisson e do módulo de Young, pode-se concluir que a
extensão por exemplo na direcção do eixo coordenado 0x corresponderá à soma de três valores,
que são as contribuições das tensões normais nas três direcções, que devido ao princípio de
sobreposição podem ser consideradas separadamente. Assim é possível aplicar a tensão na
mesma direcção, ou seja x , o que causa a extensão definida via a lei de Hooke /x E . Aplicando a
tensão numa outra direcção, por exemplo y , a extensão x toma o papel da extensão na
direcção transversal relativamente à tensão considerada, e por isso a contribuição à componente
x entra via efeito de Poisson como /y y E . Análogamente para aplicação de z pode-se
concluir que a contribuição à extensão x é /z E . Em resumo:
1x x y z
E
e análogamente para restantes extensões.
No ensaio de corte concluiu-se que
xy
xyG
e análogamente para restantes planos coordenados.
Estas duas relações permitem concluir que matriz de flexibilidade de um material isotrópico pode-
se escrever na forma:

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1
2
0
0
DD
D
Em que os blocos 0 são blocos 3x3 de zeros e os restantes blocos são definidos como
1
11
1
1
DE
e 2
1 0 01
0 1 0
0 0 1
DG
Neste caso a matriz de rigidez tem a forma semelhante.
1
2
0
0
CC
C
, 1
1
11 1 2
1
EC
, 2
1 0 0
0 1 0
0 0 1
C G
Chama-se à atenção que no caso de componentes de corte e distorções, em cada plano
coordenado, cada componente de tensão de corte está ligada à sua correspondente componente
de distorção, no entanto, relativamente às componentes normais e extensões isso não se verifica.
Tensão normal na direcção do eixo coordenado 0x provoca extensões em todas as três direcções
e vice versa.
Foi dito anteriormente que para descrição de um material isotrópico seriam precisas apenas duas
constantes, no entanto as relações em cima usam três. Pode-se comprovar que para assegurar a
isotropia, ou seja, propriedades iguais em todas as direcções, o módulo de corte tem que ter a
forma
2 1
EG
Esta equação chama-se também, condição de isotropia (necessária e suficiente).
A dependência do módulo do volume nas outras constantes, nomeadamente no módulo de Young
e no número de Poisson pode ser comprovada da forma seguinte:
somam-se as primeiras 3 equações constitutivas
1
1 1 2x x y z
E
1
1 1 2y y x z
E
1
1 1 2z z x y
E
a soma dá

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1 2
1 1 2x y z x y z x y z
E
3 1
1 1 2m x y z
E
3 3
1 2m m
E
, ou seja
3 1 2m V
E
comparando com
3 mV m
K
pode-se concluir que
3 1 2
EK
Posteriormente comprovar-se-á que os módulos têm que ser positivos. Resumindo, das relações
que se obtiveram
3 1 2
EK
e
2 1
EG
pode-se concluir que o número de Poisson tem que verificar os limites seguintes
1 1/ 2
Recorda-se que o valor 1/ 2 foi atribuído aos materiais que não alteariam o seu volume após da
colocação da carga, ou seja materiais incompressíveis. Agora pode-se verificar que o módulo de
volume destes materiais tende para infinito, o que comprova que não se verifica alteração de
volume após da aplicação de carga.
Os valores negativos do número de Poisson, significam que aplicando a carga de tracção numa
direcção, as dimensões quer longitudinal (na direcção da carga) quer transversais (nas direcções
perpendiculares à direcção de carga) aumentam. Um exemplo deste material mostra-se na figura
seguinte, este material é composto pelas barras rotuladas. É fácil de imaginar, que aplicando a
carga na direcção horizontal a forma da figura que se chama favos de mel invertidos, passa a ter a
forma de favos de mel, ou seja vai aumentar na direcção vertical.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Figura – Exemplo do material de número Poisson negativo
No entanto os materiais que se usam na prática de um engenheiro civil têm o número de Poisson
positivo, metais à volta de 0,3 e betões à volta de 0,2.
Como foi dito anteriormente, para descrição de um material isotrópico podem-se escolher 2
constantes de material. Além da escolha de módulo de Young a do número de Poisson explicada
acima, existem outras possíveis descrições frequentemente usadas. A descrição introduzida por
Lamé usa ainda outra constante, constante de Lamé e para módulo de corte G usa . Esta
formulação simplifica a forma de matriz de rigidez, cujo primeiro bloco tem depois a seguinte
forma:
1
2
2
2
C
Comparando com a forma anterior
1
1
11 1 2
1
EC
vê-se imediatamente que
1 1 2
E
basta então comprovar, que com esta definição a componente diagonal verifica a sua forma, ou
seja
11 22 2
2 1 1 1 2 1 1 2 1 1 2
EE EE

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
6. Separação das partes volúmicas e desviatóricas
Outra formulação escolha o módulo de corte e o módulo de volume. Esta tem várias vantagens na
descrição de energia de deformação. O primeiro bloco da matriz de rigidez tem depois a forma
1
4 / 3 2 / 3 2 / 3
2 / 3 4 / 3 2 / 3
2 / 3 2 / 3 4 / 3
K G K G K G
C K G K G K G
K G K G K G
Para verificar que também esta formulação é idêntica às outras, podem-se comparar directamente
os termos diagonais
1 2 1 2 14 4
3 3 1 2 3 2 1 3 1 1 2 1 1 2
EE EK G E
e fora da diagonal
1 1 22 2
3 3 1 2 3 2 1 3 1 1 2 1 1 2
E E EK G E
Como foi dito em cima, esta formulação tem vantagens na descrição da energia de deformação.
Estas vantagens são ligadas ao facto, que se conseguem separar as partes de energia de
deformação que corresponde à alteração de volume e à alteração de forma. Esta separação tem
vantagens na definição de critérios de cedência e de rotura. Vai-se em seguida mostrar esta
separação nas relações constitutivas. Isso significa que existem relações constitutivas que ligam
apenas as partes volúmicas de tensão e de deformação, e depois outras que ligam apenas as
partes desviatóricas. A ligação das partes volúmicas já foi estabelecida como:
m VK
Recorda-se que a parte volúmica do tensor das tensões foi definida como:
V
m I
em que I é a matriz unitária e que
3V m
A ligação das partes desviatóricas vai-se comprovar na forma:
2D DG
Nesta formulação usa-se a posição das componentes de tensão e de deformação na forma
matricial, o que representam os parenteses .

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
A ligação das componentes fora da diagonal é óbvia, por exemplo:
2xy xy xyG G
A ligação das componentes diagonais significa que por exemplo:
2 2D D
x x m x x mG G
Usado a equação já comprovada
3 2x m x mK G
3 23 3
x y z x y z
x xK G
2 4 2 2
23 3 3 3
x x y z x y z x y zK G K G K G K G
que é relação verídica, o que finaliza a prova.
O invariante que se usa para a definição de energia de deformação é
T
ou seja, o produto interno entre a tensão e a deformação escritas na forma vectorial. Vai-se provar
que é possível separar este produto na parte volúmica e desviatórica, ou seja em alteração de
forma e de volume.
2
2:
3 : 2 :2
D D
T D D D Dmm m VK G
K G
Na descrição em cima, o símbolo “:” significa produto interno entre matrizes, ou seja no caso de
matrizes 2x2 isso implica
:a b e f
ae bf cg dhc d g h
A relação anterior, implica que separando a tensão e a deformação na parte volúmica e
desviatórica, os termos cruzados, ou seja o produto interno da parte volúmica de tensão com a
parte desviatórica de deformação, é nulo, e vice versa. A prova é feita da maneira seguinte:

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
0 0
0 0
0 0
T TT
x x x mm m
y y y mm m
T z z z mm m
yz yz yz
xz xz xz
xy xy xy
x m
y m
z m
yz
xz
xy
Na equação em cima, entre parenteses a tensão e a deformação é separada na parte volúmica e
desviatórica. Depois:
30 0
0 0
0 0
T
m m
m m
m m
m m
:
T
x m x m
y m y m
z m z m D D
yz yz
xz xz
xy xy
3 00
0
0
T
x m m
y m m
z m m
m x m m y m m z m m x y z myz
xz
xy
3 00
0
0
T
x mm
y mm
z mm
m x m m y m m z m m x y z myz
xz
xy
o que finaliza a prova.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
7. Estados planos
Muitas vezes é possível simplificar a análise e reduzi-la para duas dimensões. Isso acontece
quando, nem forma, nem propriedades do material do meio contínuo, nem o carregamento
depende de uma direcção, a que se pode atribuir o eixo coordenado 0z , por exemplo.
Infelizmente não é possível nestes casos simplesmente reduzir as componentes de tensão e de
deformação, e tem que se distinguir dos casos: tensão plana e deformação plana.
7.1 Tensão plana
Os exemplos em que a componente de tensão na direcção do eixo coordenado 0z é nula ou pode
ser assumida como nula, correspondem aos estados de tensão plana. Isso acontece por exemplo
em componentes estruturais de espessura fina ou nas superfícies de componentes. Resumindo,
como nada depende do 0z , as componentes de tensão 0xz yz . Quando ainda é possível
admitir que 0z , as componentes de tensão não nulas, estão contidas somente no plano
coordenado 0xy . Neste caso é vantajoso escrever as relações constitutivas que usam a matriz de
flexibilidade e tirar outras conclusões para simplificações.
1/ / / 0 0 0
/ 1/ / 0 0 0
0/ / 1/ 0 0 0
00 0 0 1/ 0 0
00 0 0 0 1/ 0
0 0 0 0 0 1/
x x
y y
z
yz
xz
xy xy
E E E
E E E
E E E
G
G
G
A forma em cima permite concluir que a matriz de flexibilidade poderá ser reduzida e a relação
constitutiva simplificada a
1/ / 0
/ 1/ 0
0 0 1/
x x
y y
xy xy
E E
E E
G
em que
1/ / 0
/ 1/ 0
0 0 1/
red
E E
D E E
G
foi obtida cortando linhas e colunas 3,4,5.
Verifica-se ainda que 0xz yz , mas z tem que ser diferente de zero, para não violar as
relações constitutivas. Assim

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
z x yE
No entanto as relações constitutivas com a matriz de rigidez, não se podem obter pela redução da
matriz de rigidez, mas pela inversa da matriz de flexibilidade reduzida, ou seja
1
/ / 0
/ / 0
0 0
x x x
red
y y y
xy xy xy
d E d E
D d E d E
G
em que d representa inverso de terminante do primeiro bloco de redD , ou seja 2 2/ 1E . Na
descrição por blocos tem-se:
2
1
11
x x
y y
E
e xy xyG
Assim pode-se simplificar a relação para z e exprimi-la usando outras componentes de
deformação, ou seja
2 11z x y x y x y x y
E
E E
Chama-se à atenção que a forma em cima representa um invariante.
7.2 Deformação plana
Os exemplos em que a componente de deformação na direcção do eixo coordenado 0z é nula ou
pode ser assumida como nula, correspondem aos estados de deformação plana. Isso acontece por
exemplo em componentes estruturais de espessura grossa (barragens) em é praticamente
impossível detectar variações desta espessura grossa. Resumindo, como nada depende do 0z , as
componentes de deformação 0xz yz . Quando ainda é possível admitir que 0z , as
componentes de deformação não nulas estão contidas somente no plano coordenado 0xy . Neste
caso, é vantajoso escrever as relações constitutivas que usam a matriz de rigidez e tirar outras
conclusões para simplificações.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
10 0 0
1 1 2 1 1 2 1 1 2
10 0 0
1 1 2 1 1 2 1 1 20
1 00 0 01 1 2 1 1 2 1 1 2 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
x x
y y
z
yz
xz
xy xy
E E E
EE E
EE E
G
G
G
A forma em cima permite concluir que a matriz de rigidez poderá ser reduzida e a relação
constitutiva simplificada a
10
1 1 2 1 1 2
10
1 1 2 1 1 2
0 0
x x
y y
xy xy
E E
EE
G
em que
1
1
11 1 2
red EC
, 2
redC G ,
1
2
0
0
red
red
red
CC
C
foi obtida cortando linhas e colunas 3,4,5.
Verifica-se ainda que 0xz yz , mas z tem que ser diferente de zero, para não violar as
relações constitutivas. Assim
1 1 2z x y
E
No entanto, as relações constitutivas com a matriz de flexibilidade não se podem obter pela
redução da matriz de flexibilidade, mas pela inversa da matriz de rigidez reduzida, ou seja
1
1 1
1
2
0
0
redx x x
red
y y yred
xy xy xy
CC
C
em que:

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1
1 2 2
1 11 1 2 11
1 11
redCE E
e 1
21/redC G
Assim, pode-se simplificar a relação para z e exprimi-la usando outras componentes de tensão,
ou seja
1
1 11 1 2 1 1 2
z x y x y x y x y
E E
E
Chama-se à atenção que a forma em cima representa um invariante.
Como resumo desta parte, tem que se salientar que estados planos não correspondem um ao
outro ou seja, quando se verifica o estado de tensão plana ( 0z ), não se verifica o estado da
deformação plana, porque 0z , e vice versa.
Recorda-se, que os estados planos foram introduzidos principiante com o objectivo de simplificar
o problema. Isso não inviabiliza a utilização das equações em 3D, introduzindo correctamente as
componentes nulas e não nulas.
8. Carga de temperatura
A aplicação do campo de temperatura constante aos meios contínuos causa expansão uniforme
(ou seja de volume), desde que não há constrangimentos. Já no ensino secundário ensinou-se que
uma barra sujeita ao aumento de temperatura T altera o seu comprimento pelo
L TL
em que L corresponde ao comprimentos original e ao coeficiente de expansão térmica de
unidade 1ºC ou 1deg . É preciso de ter cuidado com os sinais e calcular correctamente a variação
de temperatura
fin iniT T T
que poderá ter sinal negativo, o que causará diminuição de comprimento ou redução do volume
em 3D.
Assim, pode-se concluir, que a variação de temperatura afectará apenas as componentes de
extensão e não as componentes de distorção. Define-se extensão térmica como:
1,, ,
TTT T T
em que o número “1” significa que se consideram componentes do primeiro bloco, ou seja
extensões. A deformação térmica tem a forma:

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
, , ,0,0,0TT
T T T
Deste modo a deformação vai ser composta de duas partes: elástica (que foi utilizada até agora) e
térmica. Ou seja
E T TD
que pode ser reduzido aos primeiros blocos
1 1, 1, 1 1,
1
E T TD
visto que a relação constitutiva entre as componentes de tensão de corte e distorções fica sem
alterações.
1 1
1
1
1
x x x
y y y
z z z
T
D T D T
T
As relações inversas podem ser determinadas do modo seguinte:
1
1
1
1
x x
y y
z z
D T
ou seja
1
1 1 1 1
1 1 1
1 1 1
1 1 1
x x x x
y y y y
z z z z
D T C T C T C
1 1 1
1 1
1 11 1 2 1 2 1 2
1 1
x x x
y y y
z z z
TE E E
C T C T C T
T
o que pode ser escrito como
1 1, 1,
11 2
E TEC
8.1 Carga de temperatura em estados planos
Quando a carga de temperatura actua em estados planos, é preciso ter cuidado com os
coeficientes a usar juntamente com a extensão térmica. Regra geral é possível reduzir as

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
equações, tal como foi feito na parte de explicação relativa aos estados planos e depois as
inverter.
No caso de tensão plana, foi deduzido que se podem reduzir relações constitutivas que usam a
matriz de flexibilidade, ou seja
1
x xred
y y
TD
T
neste caso a relação inversa é
1
x xred
y y
TD
T
1 1
1 1
x xred red
y y
TD D
T
1
1
redD
já foi calculada antes como
1
1 2
1
11
red ED
por isso
2 2 2
1 1 1
1 1 1 11 1 1
x x x
y y y
T TE E E E
T T
Relativamente à componente z , pode-se mostrar que
1 1 1
1
1 1
z x y x y
x y
E ET T T T
E E
T
No caso de deformação plana, foi deduzido que se podem reduzir relações constitutivas que usam
a matriz de rigidez, ou seja
11 2
x xred
y y
TEC
T
neste caso a relação inversa é
11 2
x xred
y y
TEC
T

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1 1
1 11 2
x xred red
y y
TEC C
T
1
1
redC
já foi calculada antes como
1
1
1 1
1
redCE
por isso
1 11 1
1 11 2
1 11
1
x x
y y
x
y
TE
TE E
T
TE
Relativamente à componente z , pode-se mostrar que
1 1 2 1 2
1 11 1 2 1 2
z x y
x y x y
E ET
E ET T T E T
9. Materiais ortotrópicos
Simetria de material, roda-se e resposta igual. Isotrópicos: cada plano é um plano de simetria.
Orto têm três planos de simetria.
Como foi definido anteriormente, materiais ortotrópicos têm 3 direcções de ortogonalidade ao
longo das quais as propriedades são diferentes. Além disso, cada plano formado pelas duas
direcções de ortogonalidade forma um plano de simetria de propriedades, o que permite
descrever o comportamento dos materiais ortotrópicos da maneira muito semelhante como o
comportamento dos materiais isotrópicos. A diferença fundamenta-se apenas em número de
constantes necessárias: existem 3 módulos de Young, diferentes a cada direcção de ortotropia,
existem 3 módulos de corte, diferentes em cada dos 3 planos de ortotropia e não existe nenhuma
relação entre os módulos de Young e os módulos de corte. Relativamente aos números de
Poisson, estes têm que admitir 2 índices, relacionados com a direcção da carga aplicada e a
direcção transversal à carga. Define-se:
j
ij
i
i j

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
ou seja, o primeiro índice corresponde à direcção da carga aplicada e o segundo à direcção
transversal. Parece assim que é preciso de definir ainda 6 números de Poisson, porque
naturalmente há-de esperar que
ij ji
Usando o mesmo raciocínio com para os materiais isotrópicos, a extensão por exemplo x , terá
três contribuições, /x xE devido à aplicação de x , /yx y yx y yE devido à aplicação de y
e /zx z zx z zE devido à aplicação de z . Em resumo:
1 yx zxx x y z
x y zE E E
e análogamente para outras extensões. As relações entre componentes tangenciais são óbvias. A
forma de matriz de flexibilidade é muito semelhante à do material isotrópico:
1
2
0
0
DD
D
Os dois blocos não nulos têm a forma
1
1
1
1
yx zx
x y z
xy zy
x y z
yzxz
x y z
E E E
DE E E
E E E
e 2
10 0
10 0
10 0
yz
xz
xy
G
DG
G
Contudo, pode-se comprovar que a matriz de flexibilidade tem que ser simétrica e por isso a
relação
ij ji
i jE E
reduz os números de Poisson a três valores independentes. Em resumo, pode-se concluir que é
preciso de definir 9 constantes de material. É valido ij ji , no entanto existem 2 caso em que os
valores são iguais, trivialmente quando 0ij e quando i jE E .
A matriz de rigidez seria demasiado complicada e por isso não se vai mostrar. Os valores de
números de Poisson não são limitados pelo valor 1/ 2 tal como em materiais isotrópicos, mas tem
que se verificar que os determinantes das matrizes constitutivas são positivos. Isso é de facto
mesma condição como em materiais isotrópicos. Os materiais cuja matriz constitutiva têm
determinante negativo são instáveis, e por isso não se encontram numa posição de equilíbrio.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Usando as definições anteriores, torna-se óbvio que a relação constitutiva só poderá ser escrita no
referencial que coincide com os eixos de ortotropia. Tentar exprimir a matriz constitutiva num
referencial diferente implicava cálculos bastante complicados, pelo que se aconselha alterar as
componentes de tensão ou de deformação.
É possível que num plano formado pelos 2 eixos de ortotropia se verifica isotropia. Para isso ser
válido, por exemplo no plano coordenado 0xy , é preciso que x yE E , mas não é suficiente. A
condição de isotropia dita que
2 1
xxy
xy
EG
recorda-se que neste caso xy yx .
A consequência do facto de existir apenas um referencial em que é possível escrever as relações
constitutivas, implica que as direcções principais de tensão e de deformação são diferentes. Neste
caso, por exemplo, calcular direcções principais de deformação sabendo componentes de tensão
no referencial principal implicava: (i) exprimir componentes de tensão no referencial de
ortotropia, (ii) calcular componentes de deformação no referencial de ortotropia usando a matriz
de flexibilidade, (iii) calcular valores e direcções principais de deformação. Para calcular direcções
principais de tensão sabendo componentes de deformação no referencial principal implicava: (i)
exprimir componentes de deformação no referencial de ortotropia, (ii) resolver sistema de
equações para determinar componentes de tensão no referencial de ortotropia usando a matriz
de flexibilidade, (iii) calcular valores e direcções principais de tensão. Recorda-se que no caso dos
materiais isotrópicos as direcções principais coincidem, inclusive a ordem.
10. Outras designações para comportamento mais
geral dos meios contínuos
No início deste capítulo mostrou-se um gráfico típico de ensaio unidimensional. Verificou-se que o
gráfico nem sempre pode ser representado pela recta, no entanto, desde que não se inclui o que
acontece na parte de descarga, não se podem definir outros termos que caracterizam o
comportamento de material. Nesta secção, todos os gráficos mostram-se em designações
versus . No ensaio unidimensional não há dúvida quais são as componentes que se registam no
gráfico. Mas no caso de ensaios multiaxiais ou para representar um comportamento real, tem que
se introduzir algumas medidas dos tensores na forma de invariantes, tal como por exemplo a
tensão e a deformação de von Mises. Define-se:
Comportamento elástico: comportamento elástico significa que quer a parte de carga, quer a
parte de descarga, segue sempre a mesma recta ou curva no gráfico tensão-deformação. Carga,
significa que a carga que se colocou no provete está a ser gradualmente removida. Os materiais
elásticos não apresentam assim nenhumas deformações permanentes; após a descarga completa

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
o material está livre de deformações. Quando o gráfico corresponde a uma recta, a elasticidade é
linear, quando é curva, a elasticidade é não-linear.
Figura - Elasticidade linear e não-linear
Pode-se assim concluir que os estados de tensão e de deformação não dependem da história de
aplicação de cargas, o que significativamente simplifica as análises. O comportamento não-linear é
habitualmente representado pela uma curva côncava.
Os comportamentos em que é preciso de seguir toda a história dos carregamentos, são em
princípio de dois tipos: os que causam deformações permanentes e os que não têm deformações
permanentes, mas perdem energia de deformação via atrito interno (amortecimento). Assim,
existem materiais cuja lei constitutiva, se chama-se lei reversível com histéresis, em que a palavra
reversível significa que após da descarga completa as deformações são nulas e palavra histéresis
significa que descarga se efectua pelo caminho diferente e a área formada entre as duas curvas
corresponde à perca de energia.
Figura - A lei reversível com histéresis
Comportamento que implica deformações permanentes chama-se comportamento elasto-
plástico. As deformações que não se eliminam após da descarga chamam-se deformações
plásticas, permanentes ou irreversíveis. Verificou-se experimentalmente que a descarga efectua-
se pelo caminho linear, no caso da figura em baixo é definida pelo declive do módulo de Young
inicial, que é o caso bastante comum. A deformação separa-se assim em duas partes, a que é
possível recuperar (elástica) e a permanente (plástica). O material após da descarga continua a
acumular energia que corresponde à área entre as duas curvas.

Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Figura: Comportamento elasto-plástico
10.1 Cedência
O patamar de cedência Y (yield stress) designa o nível de tensão que faz separação entre o
comportamento reversível e irreversível. Assim define-se que desde que as cargas e descargas
efectuam-se pela relação tensão-deformação, mas abaixo do patamar de cedência, não há
deformações permanentes, consequentemente a história de carregamentos não é importante e os
parâmetros que caracterizam o comportamento do material mantém-se inalterados. Atingindo a
cedência, existem em princípio 3 possíveis comportamentos.
Endurecimento: os limites de cedência seguintes aumentam, ou seja, neste caso o gráfico a partir
de patamar de cedência é representado pela curva crescente
Plasticidade perfeita: atingindo a cedência a deformação aumenta sem limite, mantendo o nível
de tensão, ou seja, neste caso o gráfico a partir de patamar de cedência é representado pela curva
horizontal
Amolecimento: os limites de cedência seguintes diminuem, ou seja neste caso o gráfico a partir de
patamar de cedência é representado pela curva decrescente
Figura: Comportamento após cedência
Mostrou-se experimentalmente que a maior parte dos materiais têm após cedência
comportamento incompressível.
10.2 Modelos para o cálculo
Sebenta da Disciplina MMC, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
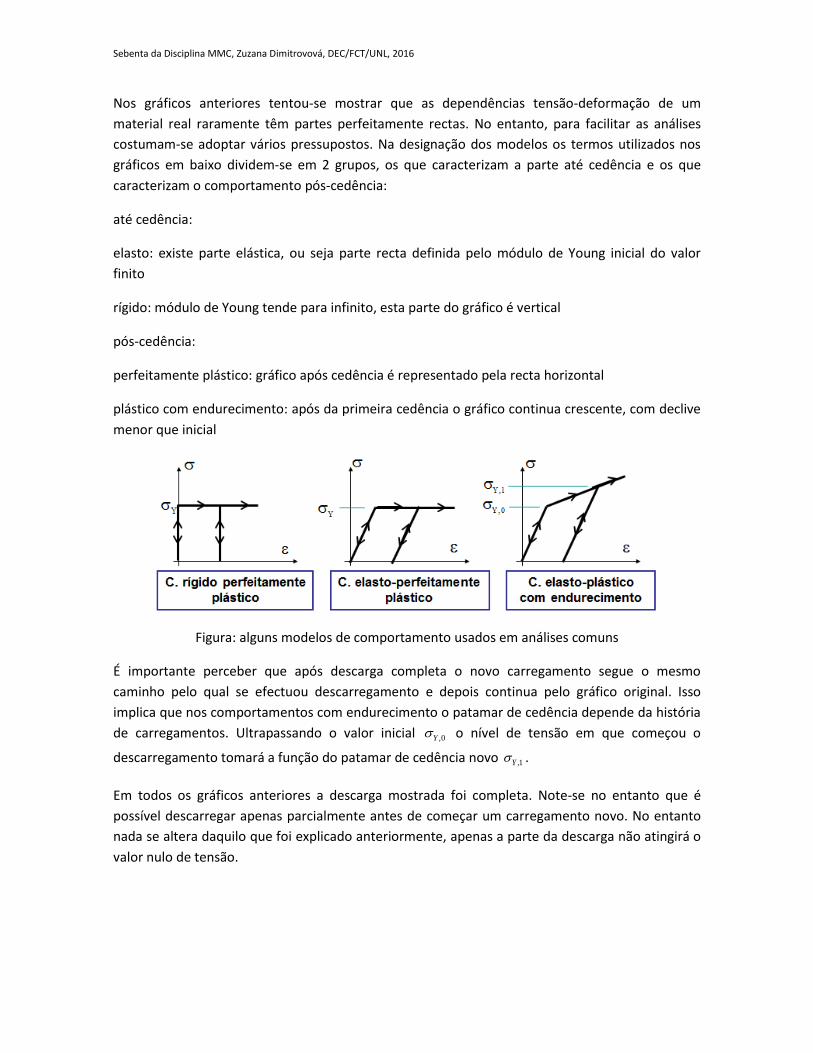
Nos gráficos anteriores tentou-se mostrar que as dependências tensão-deformação de um
material real raramente têm partes perfeitamente rectas. No entanto, para facilitar as análises
costumam-se adoptar vários pressupostos. Na designação dos modelos os termos utilizados nos
gráficos em baixo dividem-se em 2 grupos, os que caracterizam a parte até cedência e os que
caracterizam o comportamento pós-cedência:
até cedência:
elasto: existe parte elástica, ou seja parte recta definida pelo módulo de Young inicial do valor
finito
rígido: módulo de Young tende para infinito, esta parte do gráfico é vertical
pós-cedência:
perfeitamente plástico: gráfico após cedência é representado pela recta horizontal
plástico com endurecimento: após da primeira cedência o gráfico continua crescente, com declive
menor que inicial
Figura: alguns modelos de comportamento usados em análises comuns
É importante perceber que após descarga completa o novo carregamento segue o mesmo
caminho pelo qual se efectuou descarregamento e depois continua pelo gráfico original. Isso
implica que nos comportamentos com endurecimento o patamar de cedência depende da história
de carregamentos. Ultrapassando o valor inicial ,0Y o nível de tensão em que começou o
descarregamento tomará a função do patamar de cedência novo ,1Y .
Em todos os gráficos anteriores a descarga mostrada foi completa. Note-se no entanto que é
possível descarregar apenas parcialmente antes de começar um carregamento novo. No entanto
nada se altera daquilo que foi explicado anteriormente, apenas a parte da descarga não atingirá o
valor nulo de tensão.



![AVALIAÇÃO DA RIGIDEZ ROTACIONAL EM ESTRUTURAS PLANAS DE … · M] - Matriz de rigidez considerando apenas o efeito rotacional [S jj] - Matriz de rigidez modificada [0] S M - Matriz](https://img.document.onl/doc/110x75/5f345d5f9cad421a306e8925/avaliafo-da-rigidez-rotacional-em-estruturas-planas-de-m-matriz-de-rigidez.jpg)