Embed Size (px)
Citation preview
Capitulo X.
EQUIPAMENTO DE UM BANCO DE ENSAIOS DE MOTORES
O equipamento de um banco de ensaios de motores depende evidentemente da natureza dos ensaios a serem realizados ( ensaios de recepção ou controle, ensaios de motores protótipos, ensaios de endurance, ensaios de pesquisa, etc...) e de um estudo particular do funcionamento do motor efetuado ao longo dos ensaios. As medições a serem feitas para caracterizar o funcionamento de um motor podem ser muito diversas e neste capitulo nos iremos estudar somente os casos mais clássicos. Os capítulos seguintes tratarão de certas medições particulares: analise dos gases de escapamento, medidas de pressão,...
Entre as medições classicas geralmente utilizadas, podemos citar:
. • O torque
. • A velocidade de rotação ( numero de voltas do motor por minuto ou voltas totais ao longo de uma medição), . • As vazões de combustível, de ar admitido, . • As temperaturas do ar ambiente, de liquido de refrigeração, do óleo lubrificante, dos gases de escapamento, de uma peca em particular do motor,.. . • A pressão atmosférica, as pressões no coletor de admissão, no coletor de escapamento, em diferentes pontos do circuito de sobre-alimentacao, do óleo no circuito de lubrificação, do combustível no circuito de alimentação, etc... . • A umidade do ar ambiente . • O avanço da ignição ou da injeção de combustível, etc... 1. X.1. Absorção da energia mecânica 2. X.1.1 Medições em funcionamento estabilizado X.1.1.1 Generalidades sobre os freios
Os freios mais utilizados no banco para medição em funcionamento estabilizado permitem, no caso mais geral, de manter o motor dentro de condições determinadas necessárias para uma medição do torque e não diretamente da potencia. Eles devem então reunir as seguintes condições: �.- Manter um torque de frenagem constante durante um tempo suficientemente longo; �.- Manter o regime quando das variações acidentais de carga; �.- Permitir uma medição precisa do torque motor. Os freios transformam a energia mecânica produzida pelo motor em calor. Segundo o modo de transformação, nos podemos classificar os freios em diferentes categorias:
Os freios a fricção mecânica ( de Prony) ...por memória....
Devemos observar que, mesmo estes freios estando sendo abandonados há longa data devido aos seus inconvenientes: rápido desgaste do dispositivo de fricção, instabilidade, dificuldades de refrigeração e de regulagem.....a adoção de uma lona de fricção clássica é as vezes utilizada afim de aumentar o torque de frenagem a baixos regimes ( ver fig X.7).
Os molinetes a ar ( de Renard) ou freios aerodinâmicos ( por memória....) Os freios hidráulicos Os freios elétricos �.- A corrente continua ( dínamo-dinamometros reversíveis)
�.- A corrente alternada �.- A corrente de FOUCAULT ou eletromagnético. Montagem do freio em balanço
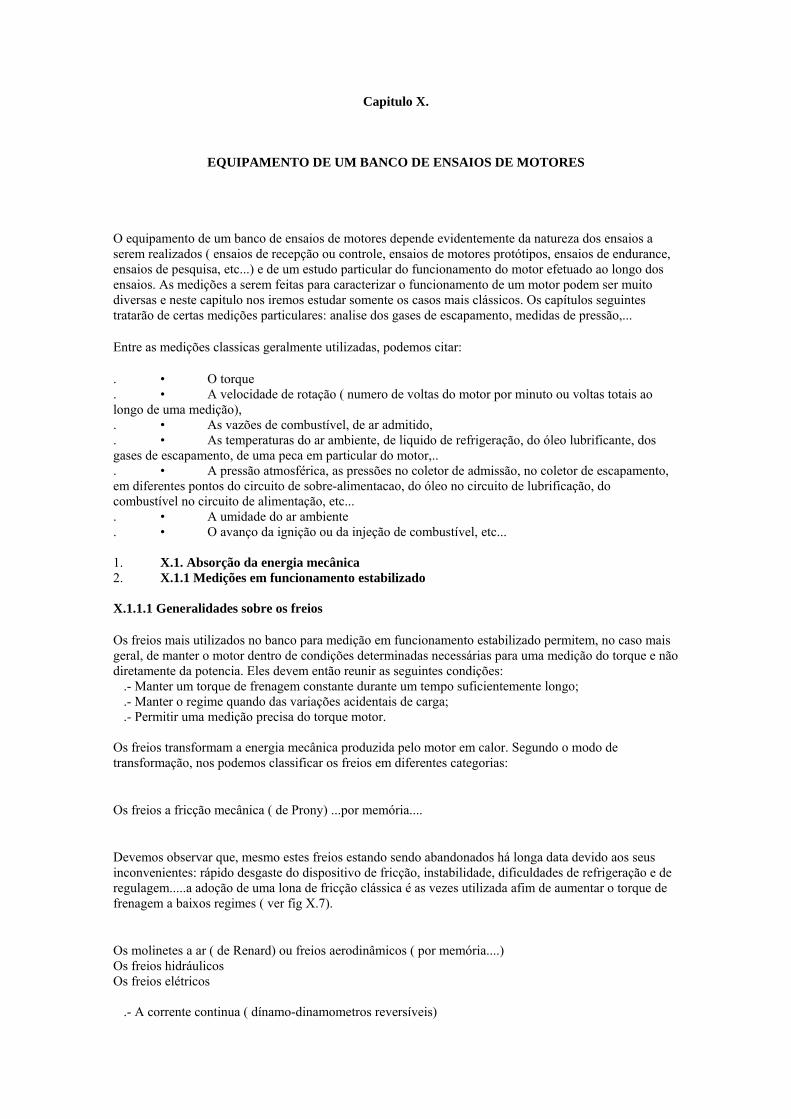
Na grande maioria dos freios que comportam um rotor acoplado ao motor de combustão e que giram no interior do estator pelo intermédio de mancais a rolamentos, a medição do torque é obtida pela montagem do freio em balanço ( fig X.1). Dentro desta montagem, o estator – ou corpo pendular – do freio fica livre para oscilar em torno do mesmo eixo que rotação do rotor graças aos dois rolamentos ( fig X.1.) ou sobre realizações mais recentes, grassas a uma suspencao por feixes de molas ( patente SCHENCK) ( fig X.3.). As forcas exteriores as quais o conjunto do freio é submetido são: - o peso P onde a resultante tem um momento nulo em relacao ao eixo de rotação; - o torque do motor Cm transmitido por intermédio do rotor; - o torque C de basculamento do rotor, resultante do dispositivo de medição e antagonista ao torque Cm. Para uma velocidade de rotação uniforme do motor, a igualdade entre o torque motor Cm e o torque de basculamento C, o estator fica em uma posição de equilíbrio. La medição do torque: C = F * L correspondente àquela do torque motor.
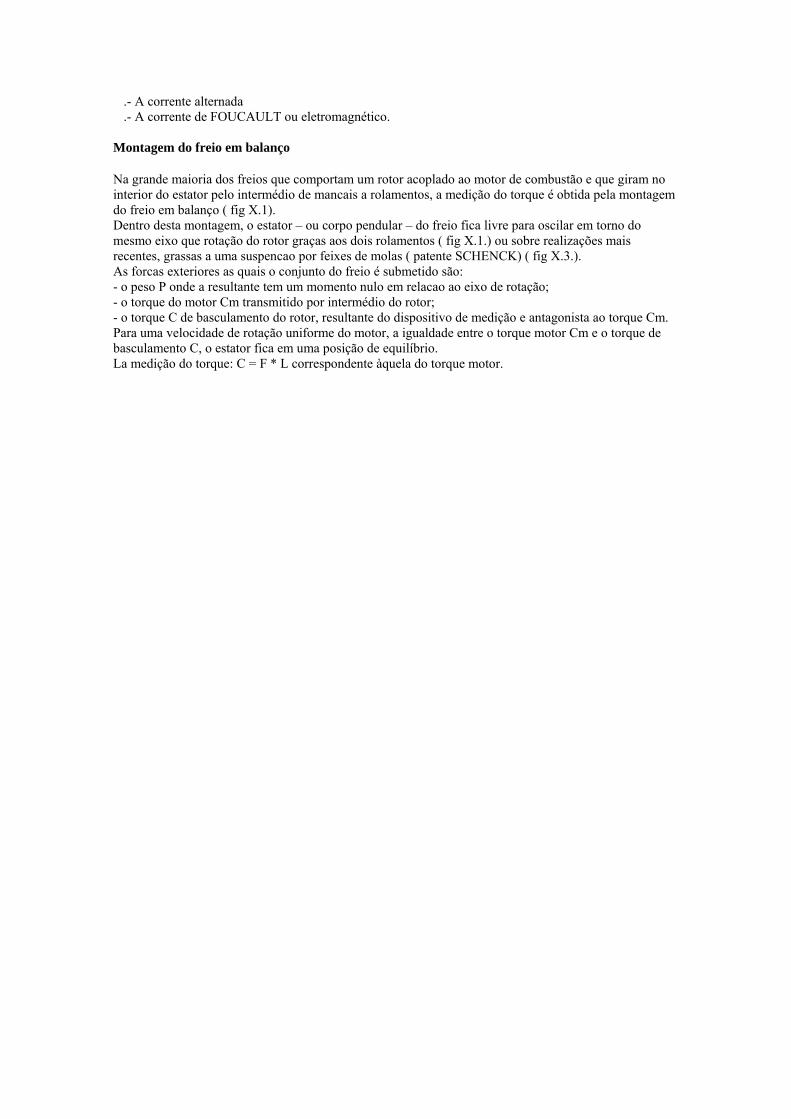
Estabilidade de um conjunto motor-freio
Para que a estabilidade seja assegurada – dentro do caso de um motor não equipado de um regulador de velocidade – é necessário que, uma vez que o regime aumenta, o torque de frenagem aumente mais rapidamente que o torque do motor. ( Fig X.2.)
A estabilidade será ainda melhor se o ângulo α for grande e correspondera a uma característica de frenagem vertical.

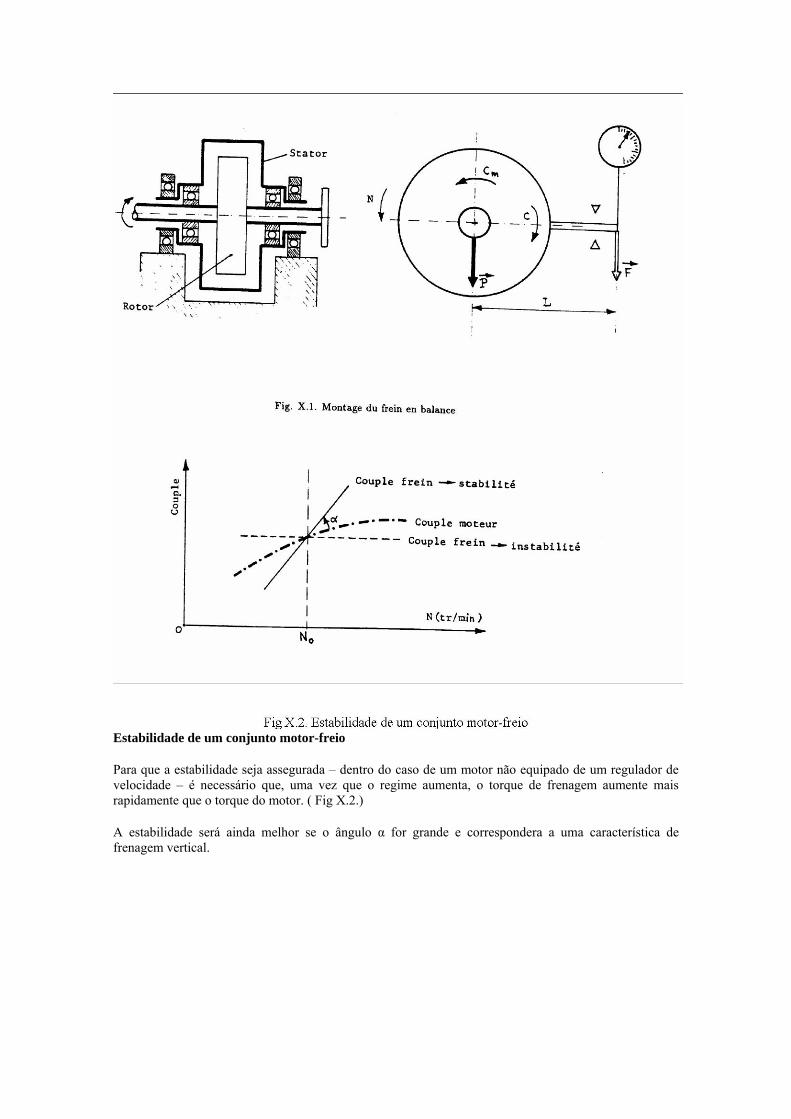
- Diagrama de utilização de um freio
A zona 0-1-2-3-4-0 corresponde ao domínio onde o freio assegura a absorção da potencia do motor. Por
razoes físicas e técnicas, este diagrama de potencia é limitado pelas linhas seguintes:
0-1: Corresponde ao Maximo de potencia podendo ser absorvida pelo freio e constitui a característica do
freio a plena carga.
1-2: Corresponde evidentemente a limitação de potencia imposta pelo torque limite compatível com a
resistência mecânica da arvore e do rotor do freio ou do sistema de medição de torque.
2-3: Corresponde a potencia limite condicionada pelo aquecimento dos enrolamentos dos freios elétricos
ou da água de refrigeração para os freios hidráulicos.
3-4: Corresponde a limitação imposta pela velocidade máxima de rotação àquela o rotor pode girar com
um nível se segurança suficiente levando em conta a sua resistência mecânica.
0-4: Corresponde a utilização do freio a seco ( somente forcas de atrito).
As curvas D1 e D2,..sao exemplos de características de frenagem naturais obtidas para uma regulagem
determinada do dispositivo de regulacao ( resistência da carga de um dínamo-freio, ...).
O freio a ser acoplado em um motor de ensaio sera escolhido de maneira tal que a curva de potencia máxima do motor seja inscrita inteiramente no interior do diagrama de carga do freio ( Fig X.4).
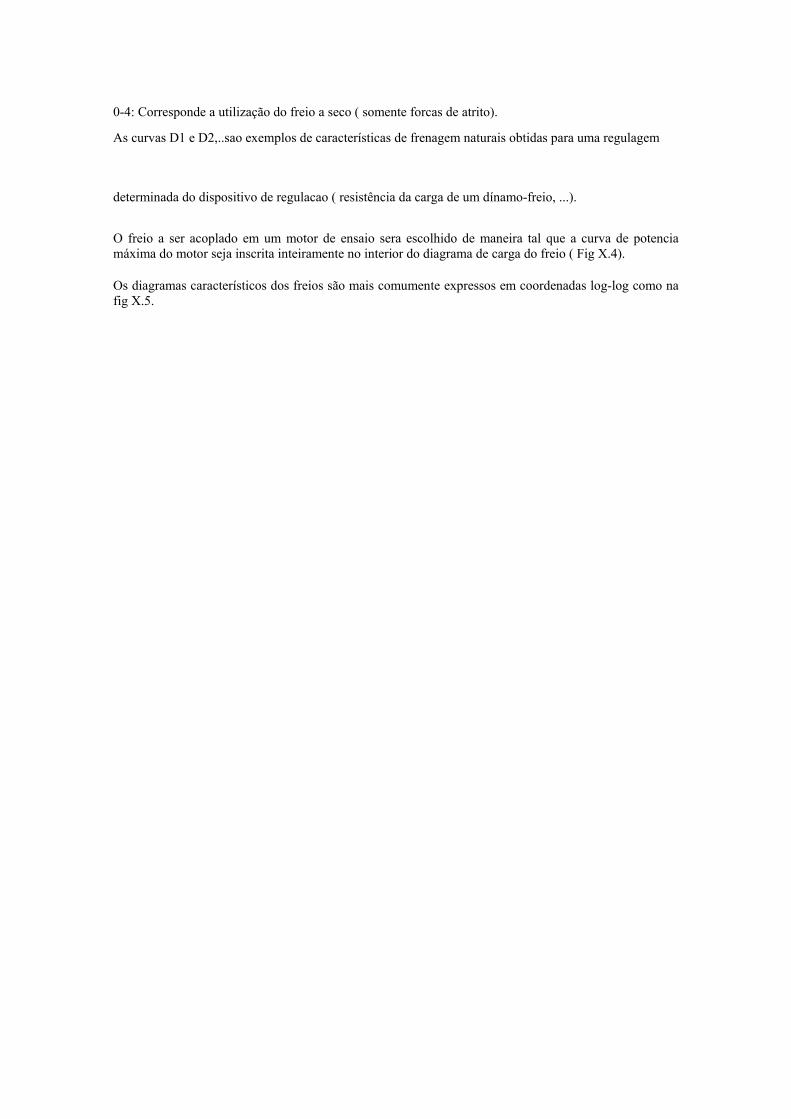
Os diagramas característicos dos freios são mais comumente expressos em coordenadas log-log como na fig X.5.
X.1.1.2. Freios hidráulicos
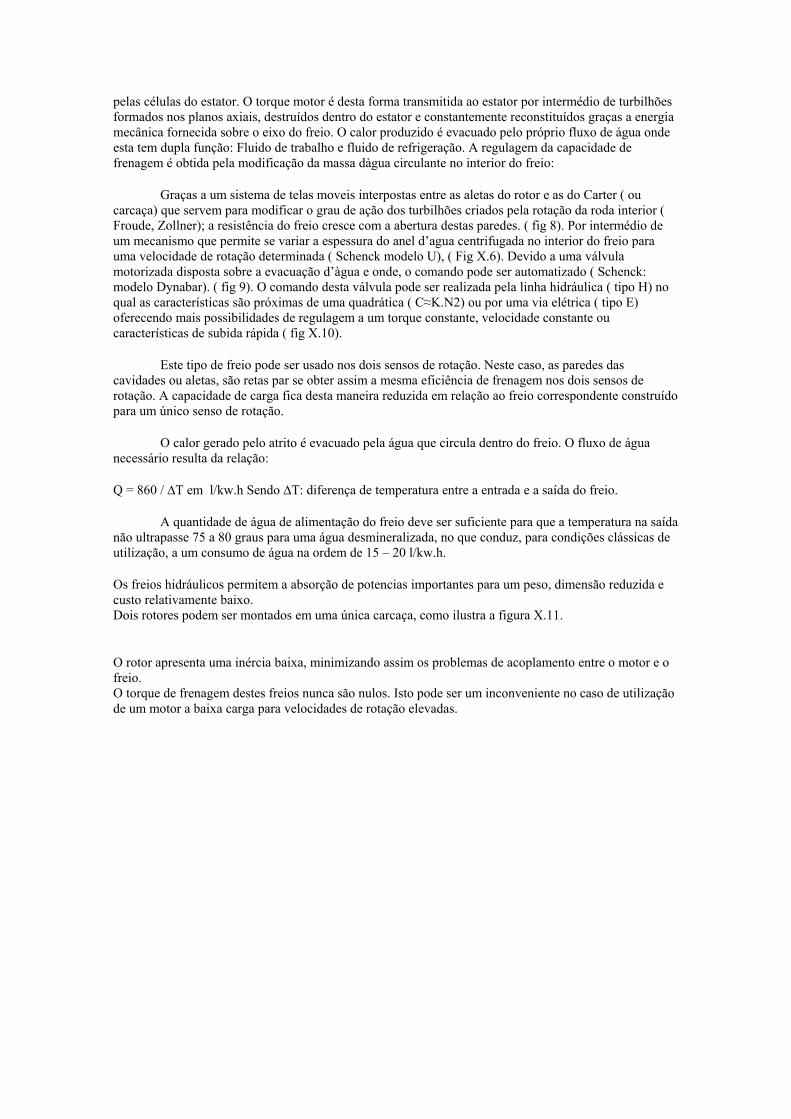
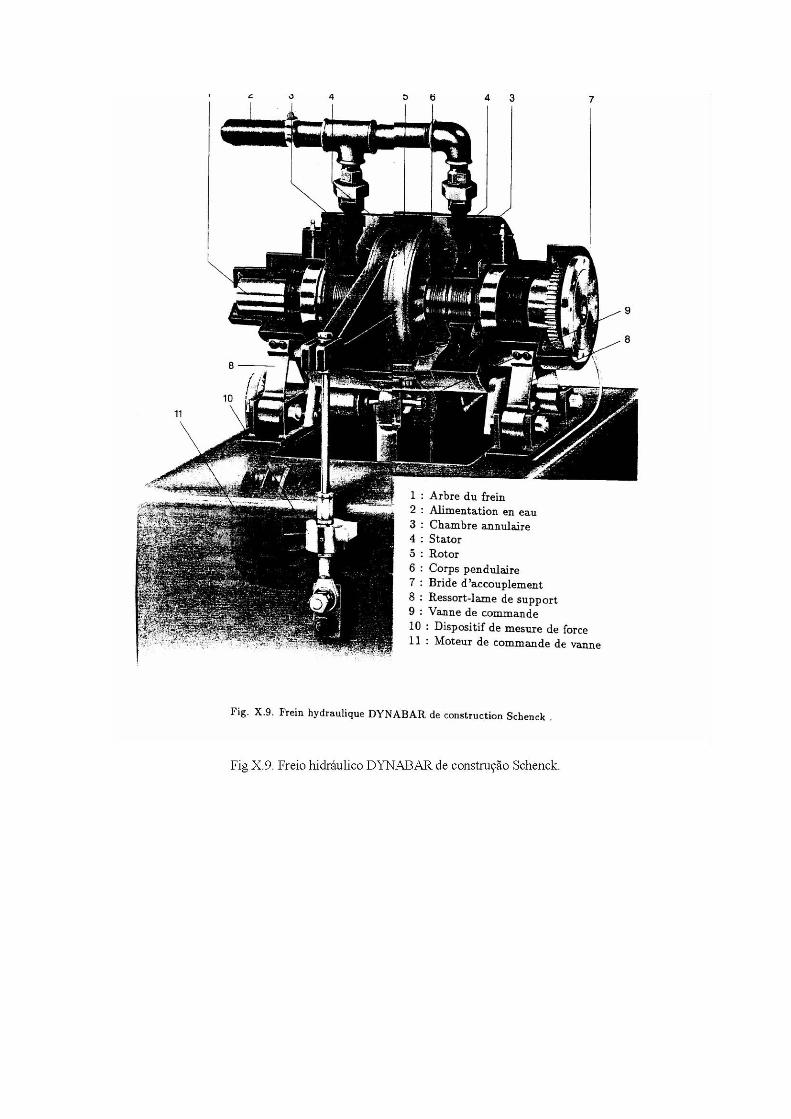
Estes freios, de construções diferentes segundo a marca, se compõem de um rotor solidário de uma arvore acoplada em um motor de ensaio; este rotor roda no interior de um Carter montado em balanço entorno da arvore e equilibrado pelo dispositivo de medição do torque. O rotor e o interior do Carter são constituídos de alvéolos – câmaras de turbulência – de formas apropriadas girando de modo que uma “enxerga”a outra, A água é acelerada dentro das cavidades do rotor, girando a mesma velocidade do motor e é freada
pelas células do estator. O torque motor é desta forma transmitida ao estator por intermédio de turbilhões formados nos planos axiais, destruídos dentro do estator e constantemente reconstituídos graças a energia mecânica fornecida sobre o eixo do freio. O calor produzido é evacuado pelo próprio fluxo de água onde esta tem dupla função: Fluido de trabalho e fluido de refrigeração. A regulagem da capacidade de frenagem é obtida pela modificação da massa dàgua circulante no interior do freio:
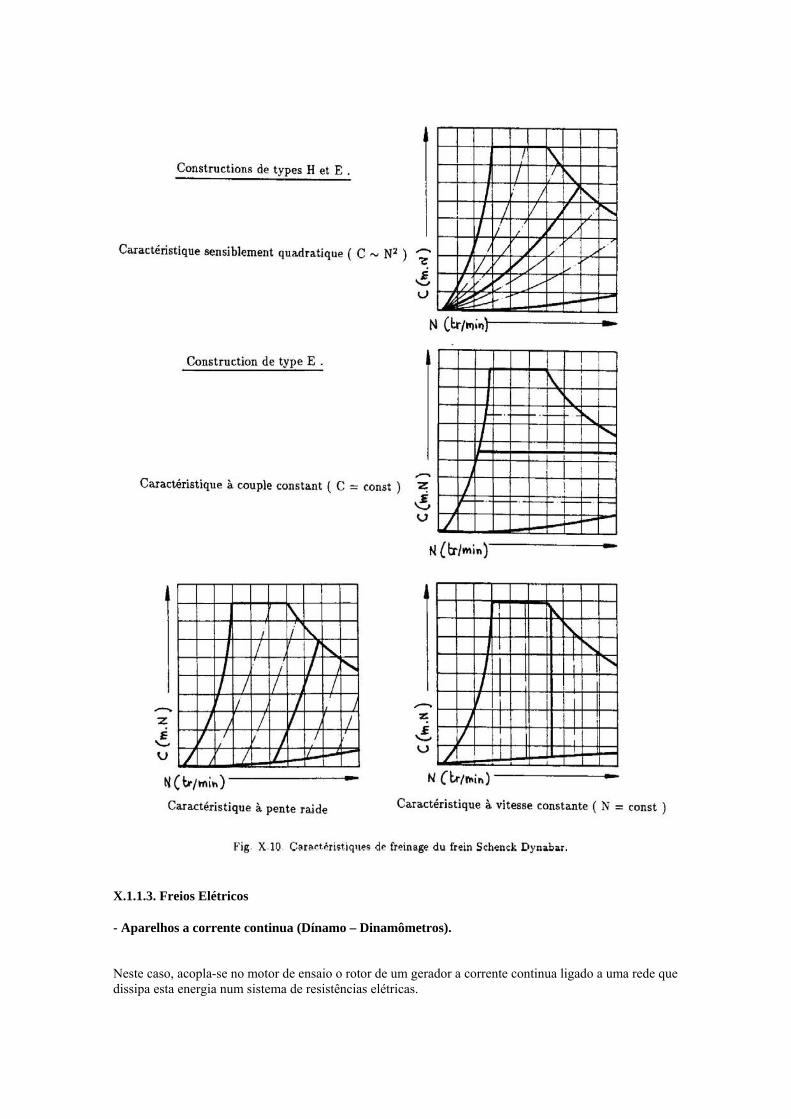
Graças a um sistema de telas moveis interpostas entre as aletas do rotor e as do Carter ( ou carcaça) que servem para modificar o grau de ação dos turbilhões criados pela rotação da roda interior ( Froude, Zollner); a resistência do freio cresce com a abertura destas paredes. ( fig 8). Por intermédio de um mecanismo que permite se variar a espessura do anel d’agua centrifugada no interior do freio para uma velocidade de rotação determinada ( Schenck modelo U), ( Fig X.6). Devido a uma válvula motorizada disposta sobre a evacuação d’àgua e onde, o comando pode ser automatizado ( Schenck: modelo Dynabar). ( fig 9). O comando desta válvula pode ser realizada pela linha hidráulica ( tipo H) no qual as características são próximas de uma quadrática ( C≈K.N2) ou por uma via elétrica ( tipo E) oferecendo mais possibilidades de regulagem a um torque constante, velocidade constante ou características de subida rápida ( fig X.10).
Este tipo de freio pode ser usado nos dois sensos de rotação. Neste caso, as paredes das cavidades ou aletas, são retas par se obter assim a mesma eficiência de frenagem nos dois sensos de rotação. A capacidade de carga fica desta maneira reduzida em relação ao freio correspondente construído para um único senso de rotação.
O calor gerado pelo atrito é evacuado pela água que circula dentro do freio. O fluxo de água necessário resulta da relação:
Q = 860 / ∆T em l/kw.h Sendo ∆T: diferença de temperatura entre a entrada e a saída do freio.
A quantidade de água de alimentação do freio deve ser suficiente para que a temperatura na saída não ultrapasse 75 a 80 graus para uma água desmineralizada, no que conduz, para condições clássicas de utilização, a um consumo de água na ordem de 15 – 20 l/kw.h.
Os freios hidráulicos permitem a absorção de potencias importantes para um peso, dimensão reduzida e custo relativamente baixo. Dois rotores podem ser montados em uma única carcaça, como ilustra a figura X.11.
O rotor apresenta uma inércia baixa, minimizando assim os problemas de acoplamento entre o motor e o freio. O torque de frenagem destes freios nunca são nulos. Isto pode ser um inconveniente no caso de utilização de um motor a baixa carga para velocidades de rotação elevadas.
X.1.1.3. Freios Elétricos
- Aparelhos a corrente continua (Dínamo – Dinamômetros).
Neste caso, acopla-se no motor de ensaio o rotor de um gerador a corrente continua ligado a uma rede que dissipa esta energia num sistema de resistências elétricas.
Medição direta da potencia A potencia mecânica de um motor térmico pode ser obtida diretamente a partir da potencia elétrica dissipada, corrigida para levar em conta o rendimento do dínamo. Este método é sobretudo empregado para realizar medições instantâneas em funcionamento transitório.
Montagem do dínamo em balanço O principio é análogo ao do freio hidráulico. O indutor do dínamo é acoplado ao motor de teste onde o indutor pode girar livre sobre a arvore do induzido. Como conseqüência das reações eletromagnéticas, o indutor tem a tendência de ser arrastado num senso inverso de rotação do induzido. O torque de basculamento é determinado por intermédio de um braço de alavanca e de um dispositivo para se medir a forca gerada. ( Célula de carga). A excitação é geralmente separada, como conseqüência, permite uma regulagem mais suave. A potencia de frenagem é regulada agindo-se sobre a corrente do induzido. De uma outra forma, para uma resistência de valor conhecido, a variação da tensão de excitação permite de se fazer variar de uma maneira continua o torque de frenagem depois do zero até o seu valor Maximo permitidas pelas características do dínamo utilizado.
Um dínamo pode ser definido por:: . • A potencia máxima que ele pode absorver em função do regime . • A velocidade máxima de rotação . • A intensidade máxima permitida de corrente no induzido. A tensão nos terminais do dínamo pode ser escrita na seguinte forma:
U≈ k.i.N
Onde i = corrente de excitação e N = velocidade de rotação.
Geralmente utiliza-se uma resistência de valor fixo e atua-se sobre a tensão de excitação. Tem-se então:
U 2
R =
I e P = U * I = U
2
/ R = ((ki)/ R)* N 2
As características de frenagem obtidas para valores fixos de R e também da corrente de excitação “i” são representadas em função do regime por curvas de segundo grau. O dínamo-freio apresenta a vantagem de pode ser utilizado como motor elétrico para a partida do motor de combustão a ser ensaiado ou também de mover um motor de ensaios por um tempo prolongado necessário em certos estudos de pesquisa. Isto explica o seu emprego quase geral no caso de um motor mono-cilindro experimental. Uma outra vantagem deste sistema é que o comando de regulagem deste tipo de aparelho pode ser adaptado facilmente. A figura X.17 apresenta o esquema de uma montagem de um conjunto em uma instalação onde emprega-se uma maquina a corrente continua conectada a rede elétrica e associada a um sistema automatizado.
Entre os inconvenientes pode-se destacar: • - Preço elevado da instalação e dimensões consideráveis em relação ao freio hidráulico. • - Inércia do rotor mais elevada, de onde vêm maiores riscos problemas de acoplamento
e necessidade de maiores meios de segurança para prevenir-se os riscos de acidentes. - Maquinas a corrente alternada
O emprego de freios a corrente continua é limitado pelo domínio das potencias e velocidades de rotação elevadas geradas pelas forças centrifugas exercidas pelos enrolamentos do rotor. O controle do regime e do torque nestas maquinas são obtidos graças a um conjunto conversor-regulador e tristores que permitem de se modificar a freqüência e a intensidade da corrente. ( fig X.18). O torque de inércia reduzido da maquina elétrica constitui uma vantagem do ponto de vista da realização de um banco dinâmico onde
pode-se simular as condições de utilização em transitório complexas de um motor. - Freios a corrente de Foucalt ou eletromagneticos
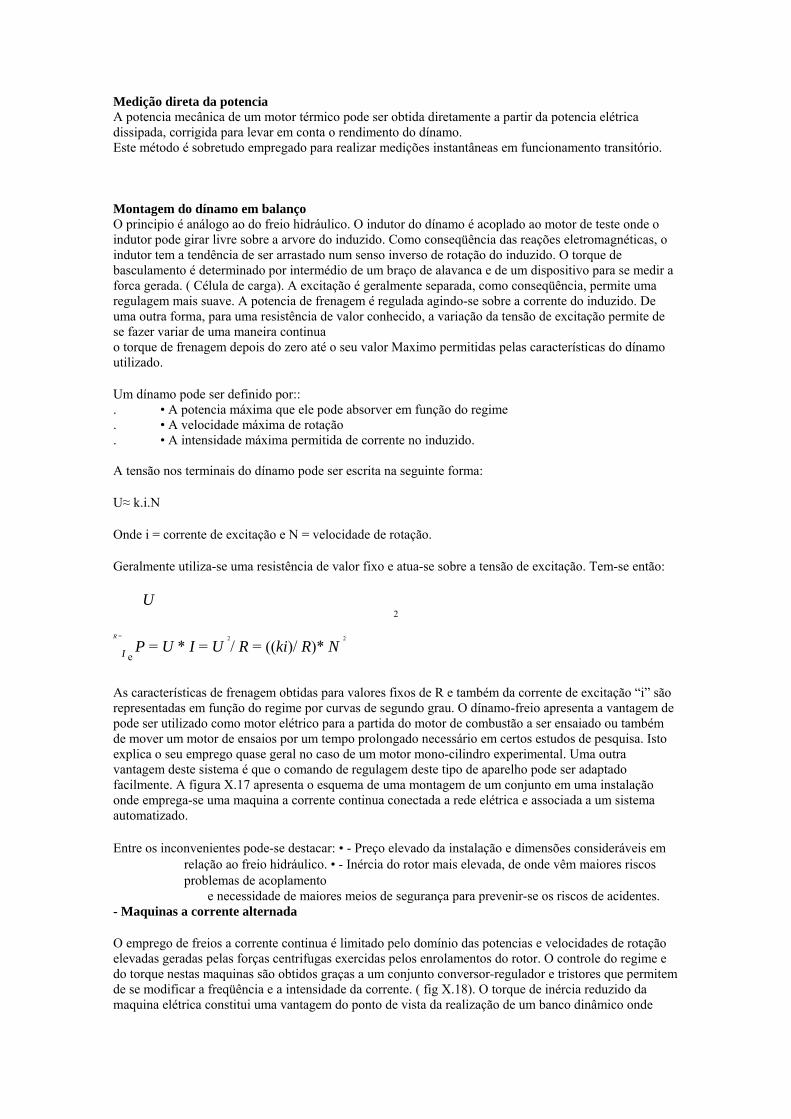
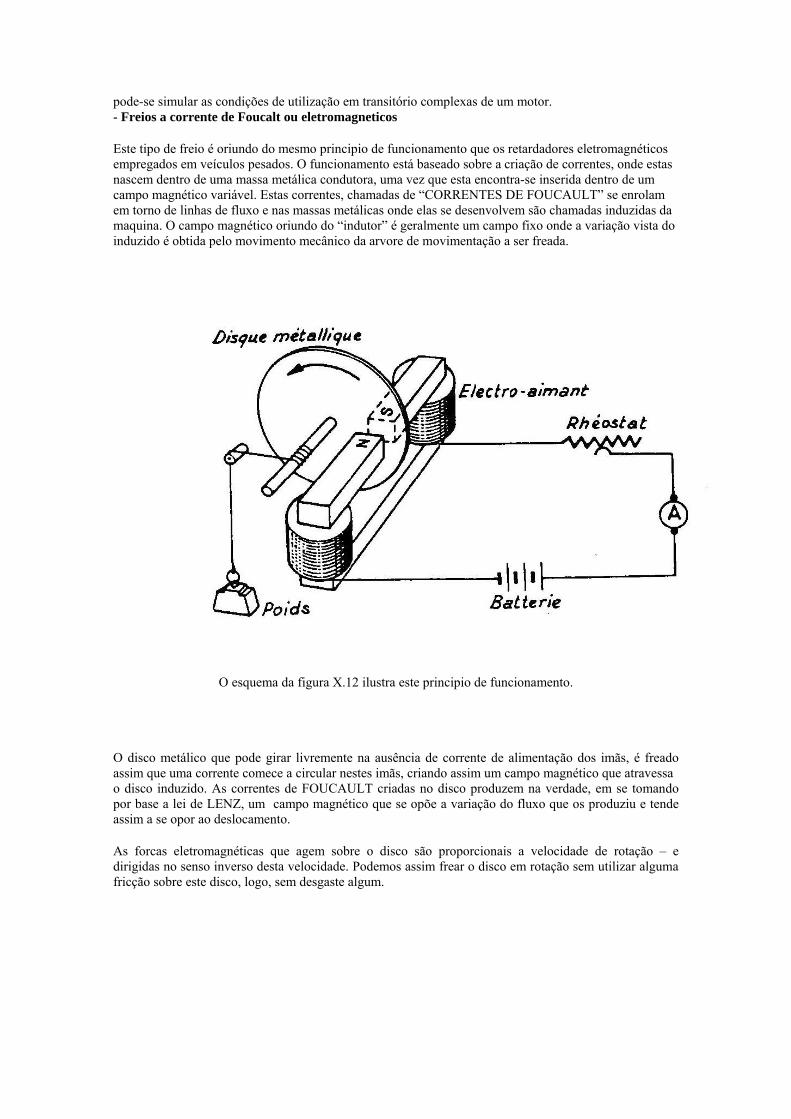
Este tipo de freio é oriundo do mesmo principio de funcionamento que os retardadores eletromagnéticos empregados em veículos pesados. O funcionamento está baseado sobre a criação de correntes, onde estas nascem dentro de uma massa metálica condutora, uma vez que esta encontra-se inserida dentro de um campo magnético variável. Estas correntes, chamadas de “CORRENTES DE FOUCAULT” se enrolam em torno de linhas de fluxo e nas massas metálicas onde elas se desenvolvem são chamadas induzidas da maquina. O campo magnético oriundo do “indutor” é geralmente um campo fixo onde a variação vista do induzido é obtida pelo movimento mecânico da arvore de movimentação a ser freada.
O esquema da figura X.12 ilustra este principio de funcionamento.
O disco metálico que pode girar livremente na ausência de corrente de alimentação dos imãs, é freado assim que uma corrente comece a circular nestes imãs, criando assim um campo magnético que atravessa o disco induzido. As correntes de FOUCAULT criadas no disco produzem na verdade, em se tomando por base a lei de LENZ, um campo magnético que se opõe a variação do fluxo que os produziu e tende assim a se opor ao deslocamento.
As forcas eletromagnéticas que agem sobre o disco são proporcionais a velocidade de rotação – e dirigidas no senso inverso desta velocidade. Podemos assim frear o disco em rotação sem utilizar alguma fricção sobre este disco, logo, sem desgaste algum.
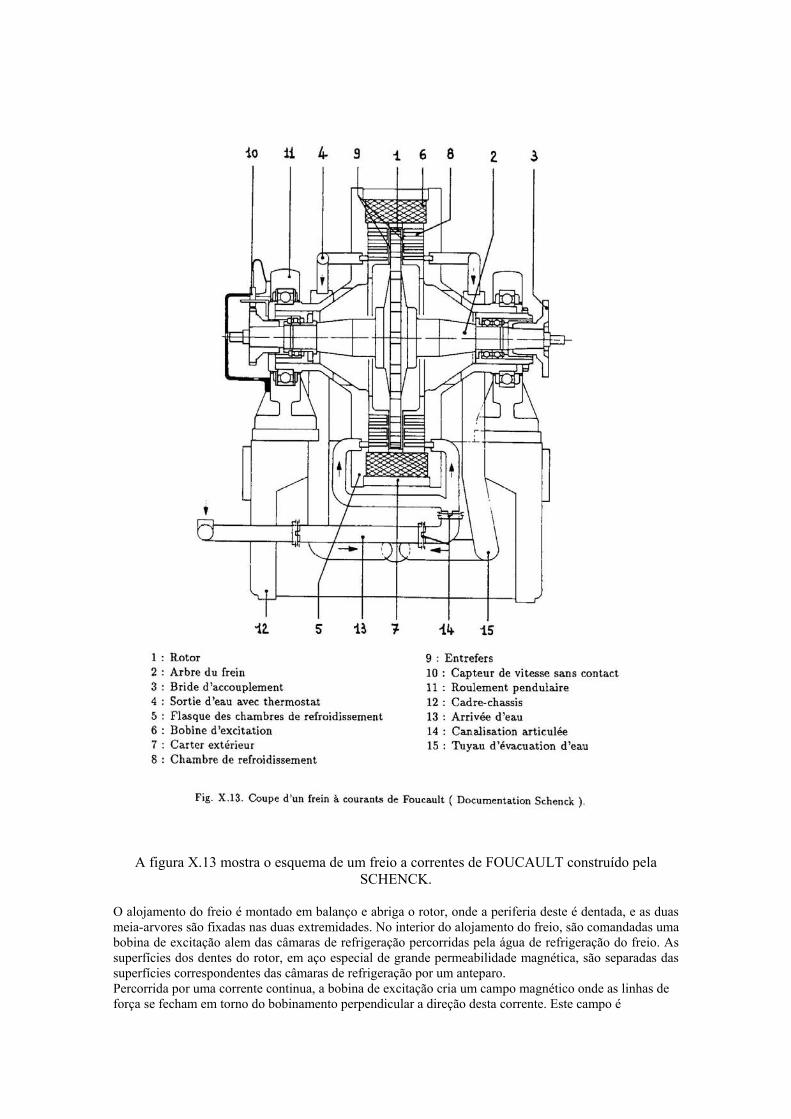
A figura X.13 mostra o esquema de um freio a correntes de FOUCAULT construído pela SCHENCK.
O alojamento do freio é montado em balanço e abriga o rotor, onde a periferia deste é dentada, e as duas meia-arvores são fixadas nas duas extremidades. No interior do alojamento do freio, são comandadas uma bobina de excitação alem das câmaras de refrigeração percorridas pela água de refrigeração do freio. As superfícies dos dentes do rotor, em aço especial de grande permeabilidade magnética, são separadas das superfícies correspondentes das câmaras de refrigeração por um anteparo. Percorrida por uma corrente continua, a bobina de excitação cria um campo magnético onde as linhas de força se fecham em torno do bobinamento perpendicular a direção desta corrente. Este campo é
estacionário nos dentes da roda polar, isto quer dizer que ele gira ao mesmo tempo que o rotor e provoca pulsações de fluxos nas paredes das câmaras de refrigeração seguindo a freqüência dos dentes rotativos.
As correntes de FOUCAULT geradas nestas paredes produzem um campo magnético que se opõe a variação do fluxo que as produziu e tende assim a se opor ao movimento do rotor. O torque de frenagem, que depende da tensão de excitação, é transmitido do alojamento montado em balanço ao aparelho de medição pelo intermédio de um braço de alavanca.
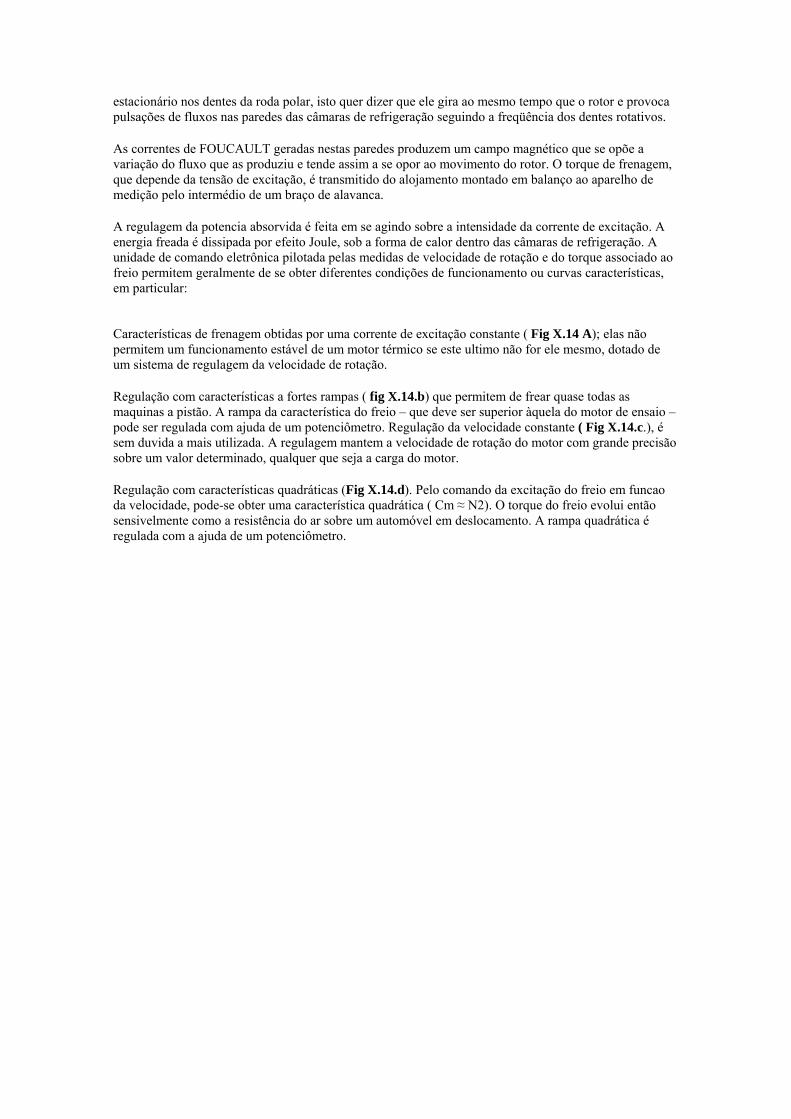
A regulagem da potencia absorvida é feita em se agindo sobre a intensidade da corrente de excitação. A energia freada é dissipada por efeito Joule, sob a forma de calor dentro das câmaras de refrigeração. A unidade de comando eletrônica pilotada pelas medidas de velocidade de rotação e do torque associado ao freio permitem geralmente de se obter diferentes condições de funcionamento ou curvas características, em particular:
Características de frenagem obtidas por uma corrente de excitação constante ( Fig X.14 A); elas não permitem um funcionamento estável de um motor térmico se este ultimo não for ele mesmo, dotado de um sistema de regulagem da velocidade de rotação.
Regulação com características a fortes rampas ( fig X.14.b) que permitem de frear quase todas as maquinas a pistão. A rampa da característica do freio – que deve ser superior àquela do motor de ensaio – pode ser regulada com ajuda de um potenciômetro. Regulação da velocidade constante ( Fig X.14.c.), é sem duvida a mais utilizada. A regulagem mantem a velocidade de rotação do motor com grande precisão sobre um valor determinado, qualquer que seja a carga do motor.
Regulação com características quadráticas (Fig X.14.d). Pelo comando da excitação do freio em funcao da velocidade, pode-se obter uma característica quadrática ( Cm ≈ N2). O torque do freio evolui então sensivelmente como a resistência do ar sobre um automóvel em deslocamento. A rampa quadrática é regulada com a ajuda de um potenciômetro.
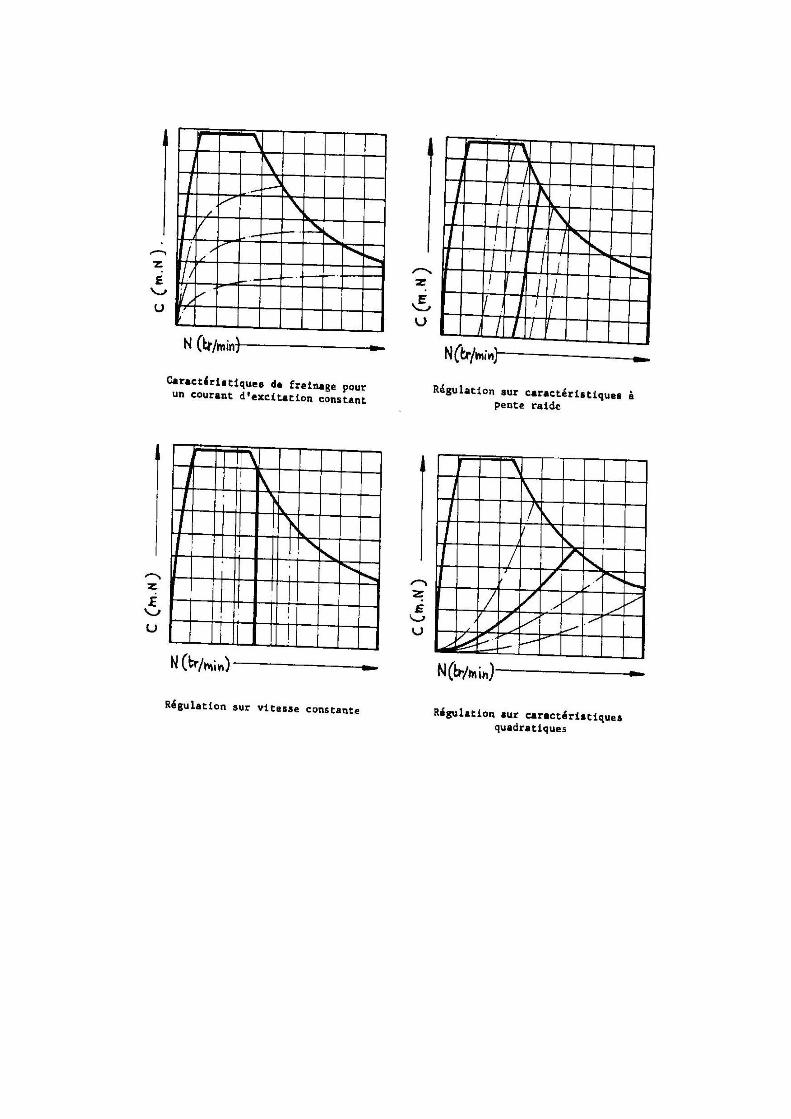
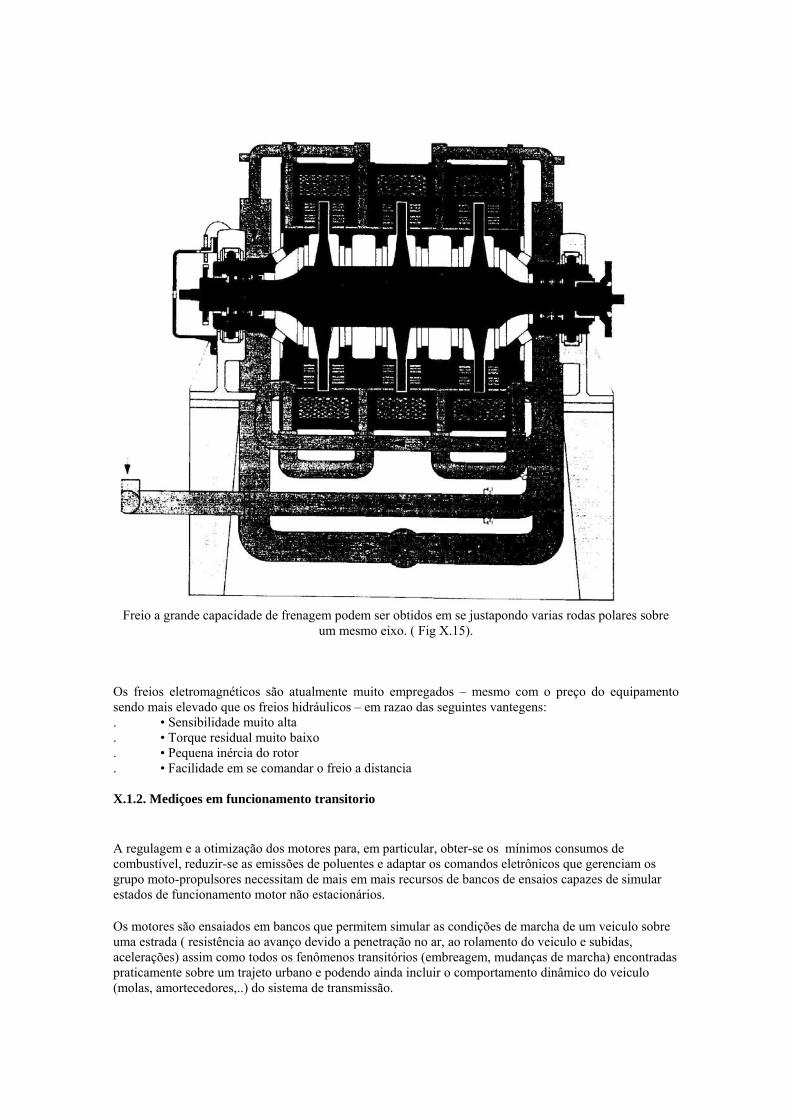
Freio a grande capacidade de frenagem podem ser obtidos em se justapondo varias rodas polares sobre
um mesmo eixo. ( Fig X.15).
Os freios eletromagnéticos são atualmente muito empregados – mesmo com o preço do equipamento sendo mais elevado que os freios hidráulicos – em razao das seguintes vantegens: . • Sensibilidade muito alta . • Torque residual muito baixo . • Pequena inércia do rotor . • Facilidade em se comandar o freio a distancia X.1.2. Mediçoes em funcionamento transitorio
A regulagem e a otimização dos motores para, em particular, obter-se os mínimos consumos de combustível, reduzir-se as emissões de poluentes e adaptar os comandos eletrônicos que gerenciam os grupo moto-propulsores necessitam de mais em mais recursos de bancos de ensaios capazes de simular estados de funcionamento motor não estacionários.
Os motores são ensaiados em bancos que permitem simular as condições de marcha de um veiculo sobre uma estrada ( resistência ao avanço devido a penetração no ar, ao rolamento do veiculo e subidas, acelerações) assim como todos os fenômenos transitórios (embreagem, mudanças de marcha) encontradas praticamente sobre um trajeto urbano e podendo ainda incluir o comportamento dinâmico do veiculo (molas, amortecedores,..) do sistema de transmissão.
Em relação aos ensaios efetuados com veiculo diretamente sobre a estrada ou sobre um banco de rolos, este tipo de banco “dinamico”oferece as seguintes vantagens:
Implementação mais rápida e fácil (precisa-se somente do motor). Maior flexibilidade (facilidade de modificação de certos parâmetros que dependem da utilização do motor: massa do veiculo, relações da caixa de cambio,....) e possibilidade de realizar certos ensaios de adaptação antes da definição completa do veiculo. Resultados a principio mais reprodutíveis, aquisições e registros precisos dos parâmetros graças a disponibilidade de toda a instrumentação de um banco de ensaios “tradicional”.
Os bancos dedicados aos ensaios dinâmicos atualmente disponíveis utilizam como unidade de carga: Maquinas elétricas (dínamos ou maquinas assíncronas) ( ver fig. X17 e X.18). Um conjunto hidrostático com grupos de bombeamento e receptação com pistões axiais. ( Fig X.19).
• Medição da potencia instantânea de um motor a combustão interna.
Um torquimetro intercalado entre o motor e o dispositivo de absorção de potencia permite, conhecendo-se a velocidade de rotação, de acessar-se a potencia instantânea desenvolvida por um motor térmico.
Uma vez que o motor é acoplado a um dínamo, esta potencia pode ser obtida a partir de medições instantâneas dos parâmetros da maquina elétrica.
O torque C sobre o eixo da maquina a corrente continua é calculado a partir da expressão:
C = C + C + C + Ci
evz
onde:
Ce:Torque elétrico (no anteparo) Cv: Torque em vazio Cz: Torque devido as perdas suplementares Ci: Torque da aceleração ou frenagem da massa em rotação da maquina.
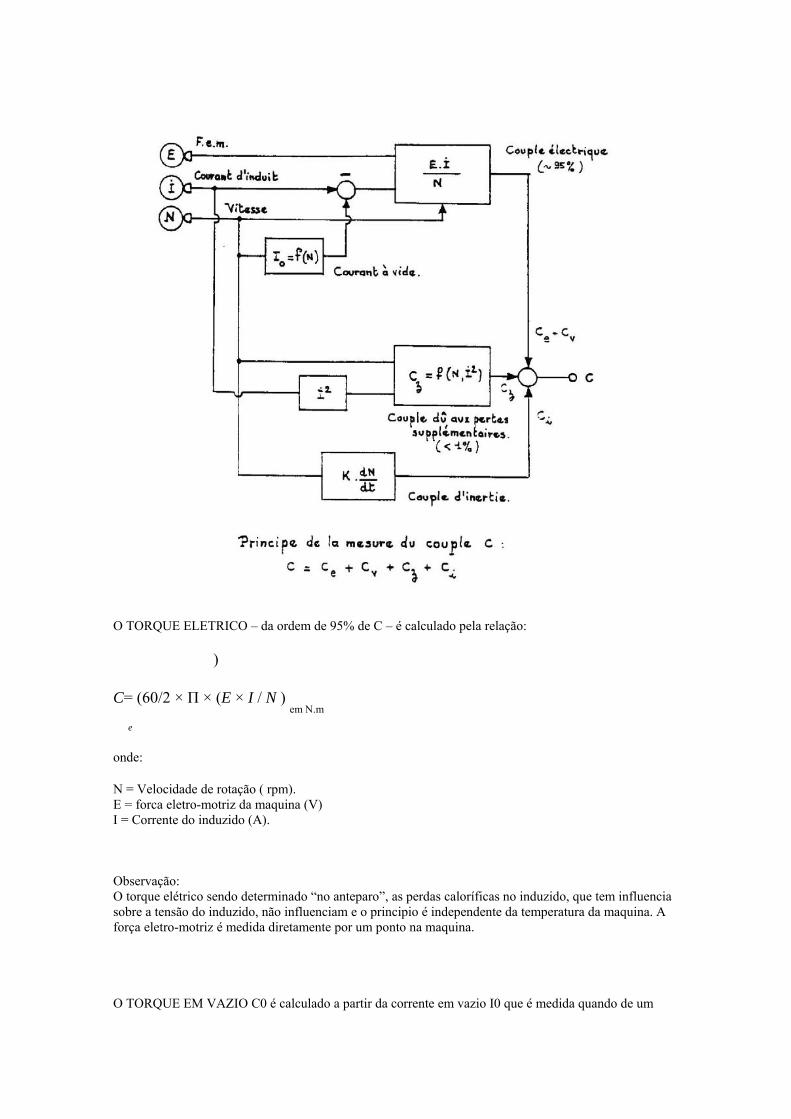
O TORQUE ELETRICO – da ordem de 95% de C – é calculado pela relação:
)
C= (60/2 × Π × (E × I / N ) em N.m
e
onde:
N = Velocidade de rotação ( rpm). E = forca eletro-motriz da maquina (V) I = Corrente do induzido (A).
Observação: O torque elétrico sendo determinado “no anteparo”, as perdas caloríficas no induzido, que tem influencia sobre a tensão do induzido, não influenciam e o principio é independente da temperatura da maquina. A força eletro-motriz é medida diretamente por um ponto na maquina.
O TORQUE EM VAZIO C0 é calculado a partir da corrente em vazio I0 que é medida quando de um

ensaio em vazio – I0 = f(N) – e estocada na memória do calculador de torque do banco. A corrente I medida em utilização motor é corrigida algebricamente então levando em consideração o valor de I0 memorizado.
O TORQUE DEVIDO AS PERDAS SUPLEMENTARES - Cz – é relativamente baixo e inferior a 1% do valor do torque nominal – está ligado a construção da maquina (circuito magnético e tipo de enrolamento). Ele é definido no construtor por uma equação : Cz = f( N, I2) e introduzido no calculador sobre a forma de um conjunto de curvas.
O TORQUE DE INERCIA, ligado a massa em rotação da maquina é calculado a partir de (dN/dt). O torque mecânico sobre o eixo é então obtido com a ajuda de um microprocessador seguindo o esquema de calculo dado pela figura X.16, a partir dos valores E, I e N.
1 – Maquina a corrente continua a excitacao separada, montada em balanco sobre barras de suporte 2 –

Acoplamento da transmissão do motor 3 - Roda dentada, 60 dentes, com captor de impulsos 4 – Célula de carga 5 – Caixa de tomadas 6 – Medidor de rotação 7 – Ventilador radial com filtro e contador a pressao diferencial 8 – Instalação de regulação com tristores 9 – Unidade de medição do torque + indicador numérico 10 – Unidade de comando com teclado e indicadores analógicos para a velocidade de rotação e torque. 11 – Regulador de velocidade e torque 12 - Comando do banco de ensaios com vigilância dos limites de funcionamento do motor, prateleira de alimentação,etc.... X.2. Mediçoes e aparelhos classicos utilizados em um banco de ensaios
X.2.1. Mediçao de potencia efetiva
Métodos diretos
A potencia mecânica pode ser determinada diretamente, uma vez que o motor a combustão é freado por uma maquina a corrente continua, através da potencia elétrica dissipada da carga uma vez que se conheça o rendimento da maquina nestas condições de utilização.
Peletrica Pmecanica =
ηdinamo
Este método, menos preciso se compararmos com a montagem do dínamo em balanço, é utilizada em funcionamento transitório. (ver X.1.2.)
A potencia pode ser deduzida diretamente da medição da velocidade de rotação, uma vez que o motor esteja acoplado a uma hélice ou a um molinete, do tipo molinete de RENARD. A dificuldade do emprego deste tipo de freio, e sua precisão limitada foram os responsáveis pela não utilização atualmente deste tipo de aparelho.
O molinete de RENARD é um freio a ar composto essencialmente de uma barra conectada pelo virabrequim do motor em ensaio, perpendicular ao eixo de rotação e portanto, dois planos simétricos em relação a este eixo, Estes planos intercambiáveis e de dimensões variadas podem ser alongados para mais ou para menos do eixo de rotação ou inclinados em relação a este ultimo. O torque resistente de um tal molinete é proporcional ao quadrado da velocidade de rotação ω e a massa especifica do ar ρar.
ρ ( p ,T ) ar aa
δ= o
ρ (1013mbar15, C) ar
Se
Onde pa,Ta : pressão e temperatura ambientes. C0 = torque resistente do molinete a 1000 rpm e nas condições padrão abaixo: O torque Cm a N ( rpm) pode ser escrito:
N
)2
C= C0.δ.(1000
m
C0 é determinado pela calibração para cada posição e/ou orientação dos planos. Em se conhecendo pa e Ta no momento do ensaio, a simples medição da rotação N do motor permite então de se determinar o torque e a potencia do motor para este regime. Podemos observar que, sobre este tipo de instalação, uma medição direta do torque pode igualmente ser obtida em se montando o conjunto motor-freio em balanço. Método indireto
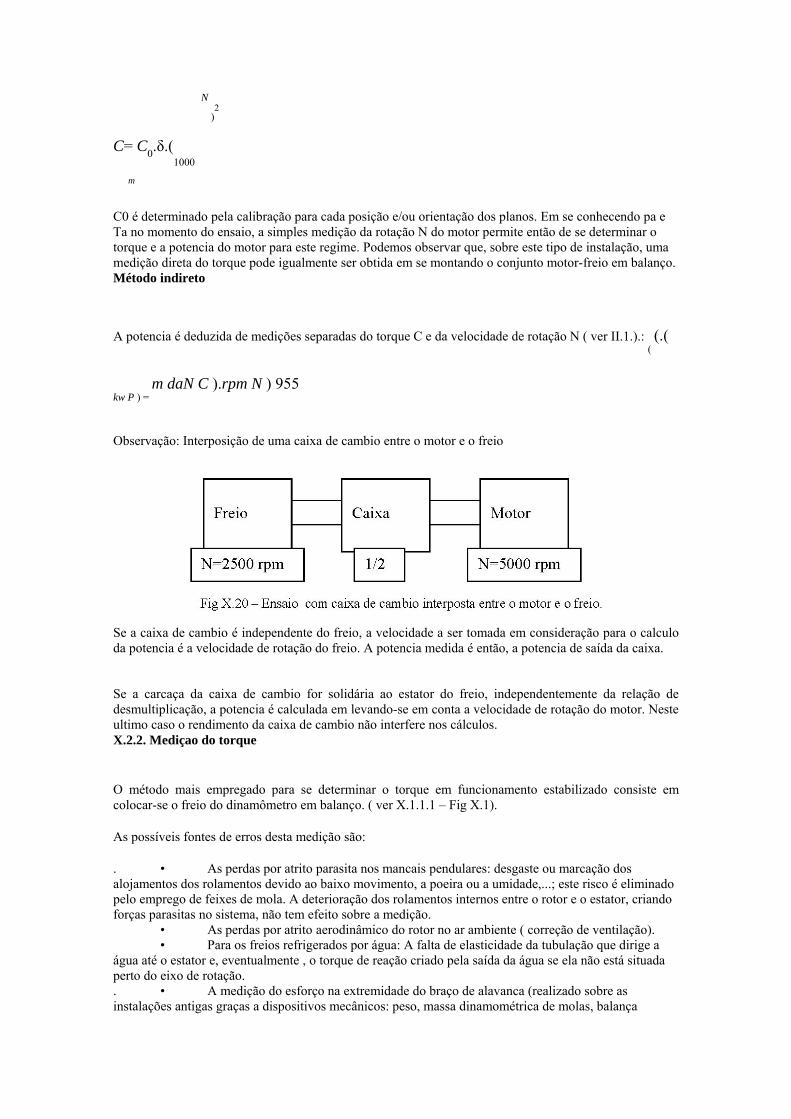
A potencia é deduzida de medições separadas do torque C e da velocidade de rotação N ( ver II.1.).: ( (.(
kw P ) = m daN C ).rpm N ) 955
Observação: Interposição de uma caixa de cambio entre o motor e o freio
Se a caixa de cambio é independente do freio, a velocidade a ser tomada em consideração para o calculo da potencia é a velocidade de rotação do freio. A potencia medida é então, a potencia de saída da caixa.
Se a carcaça da caixa de cambio for solidária ao estator do freio, independentemente da relação de desmultiplicação, a potencia é calculada em levando-se em conta a velocidade de rotação do motor. Neste ultimo caso o rendimento da caixa de cambio não interfere nos cálculos. X.2.2. Mediçao do torque
O método mais empregado para se determinar o torque em funcionamento estabilizado consiste em colocar-se o freio do dinamômetro em balanço. ( ver X.1.1.1 – Fig X.1).
As possíveis fontes de erros desta medição são:
. • As perdas por atrito parasita nos mancais pendulares: desgaste ou marcação dos alojamentos dos rolamentos devido ao baixo movimento, a poeira ou a umidade,...; este risco é eliminado pelo emprego de feixes de mola. A deterioração dos rolamentos internos entre o rotor e o estator, criando forças parasitas no sistema, não tem efeito sobre a medição. • As perdas por atrito aerodinâmico do rotor no ar ambiente ( correção de ventilação). • Para os freios refrigerados por água: A falta de elasticidade da tubulação que dirige a água até o estator e, eventualmente , o torque de reação criado pela saída da água se ela não está situada perto do eixo de rotação. . • A medição do esforço na extremidade do braço de alavanca (realizado sobre as instalações antigas graças a dispositivos mecânicos: peso, massa dinamométrica de molas, balança
automática,...) é, sobre os freios modernos, obtidos por um captor de tração-compressão (célula de carga) de alta precisão. . • Se o braço de alavanca é adaptado, pelo amplificador de medição, para um comprimento de 1 metro, a medição da força expressa em Newtons corresponde diretamente ao valor do torque em
N.m.
Levando-se em conta a formula que determina a potencia, sobre certas instalações, o comprimento do braço de alavanca L pode ser adaptado para que a expressão da potencia seja simplificada. Abaixo temos um exemplo da formula:
( ((
kw P ) = daN F ).rpm N )
1000
No caso onde L = 0,995 m, com F (força de equilíbrio do torque motor) expressa em daN. - Mediçao do torque pos barra de torçao
Estes aparelhos compreendem uma barra de torção perfeitamente elástica e sem histerese que transmite o torque entre o motor e a maquina que absorvedora de energia.
Se o torque transmitido C é tal que o limite elástico do material não seja nula e se admitirmos que, sobre a ação do torque, cada seção reta da barra fique plana e torcida de um ângulo muito pequeno proporcional a distancia da seção, a teoria da elasticidade mostra que teremos:
L C
= Θ . .0
I G
Onde: Θ = ângulo de torção L = comprimento da barra G = modo de elasticidade transversal do material ( para o
aço G ≈ 80 00 N/mm2) I0 = momento polar da seção.
Temos então:
C=k. Θ
Para uma aparelhagem genérica, onde k é uma constante que pode ser determinada por uma calibração estática prévia.
A medição do ângulo de torção Θ pode ser feita por um método ótico, indutivo ou indiretamente pela
medição da deformação da barra através de tiras de deformação superficiais (strim gauges em inglês).
A utilização de barras de torção dá a possibilidade de efetuar-se medidas de torque instantâneas durante o funcionamento em transitório do motor.





























