-
6/6/2019
1
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
Cálculo III
Universidade Federal do Pará
Instituto de Tecnologia
Campus de Belém
Curso de Engenharia Mecânica
Prof. Dr. Jorge Teófilo de Barros Lopes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
Capítulo II
Universidade Federal do Pará
Instituto de Tecnologia
Equações Diferenciais
Ordinárias de Segunda Ordem
Campus de Belém
Curso de Engenharia Mecânica
-
6/6/2019
2
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
II – EDOs de Segunda Ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
II – EDOs Lineares de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
-
6/6/2019
3
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ As equações diferenciais ordinárias lineares de
segunda ordem são uma ferramenta de larga
aplicação na engenharia, pois são essenciais para
qualquer estudo nas áreas clássicas da física
matemática
✓ O seu conhecimento é imprescindível, por exemplo,
no estudo da mecânica dos fluidos, vibrações
mecânicas, condução de calor, movimento
ondulatório, fenômenos eletromagnéticos, dentre
outros, nos quais normalmente se recai na resolução
de equações diferenciais lineares de segunda ordem.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ Para que sejam consideradas lineares de segunda
ordem estas equações devem obedecer à forma
geral
𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 𝑦 = 𝑟(𝑥)
e serem lineares em y e suas derivadas, enquanto f, g
(ditos coeficientes da equação) e r podem ser
quaisquer funções de x.
✓ Frequentemente, em vez da forma anterior a equação é
apresentada na forma
𝑃(𝑥)𝑦′′ + 𝐹 𝑥 𝑦′ + 𝐺 𝑥 𝑦 = 𝑅(𝑥),
sendo 𝑓 𝑥 = Τ𝐹(𝑥) 𝑃 𝑥 e g 𝑥 = Τ𝐺(𝑥) 𝑃(𝑥)
-
6/6/2019
4
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ Qualquer equação de segunda ordem que não pode
ser escrita sob a forma apresentada é dita não
linear.
✓ Ou seja, as equações diferenciais lineares são
caracterizadas por duas propriedades:
i. A variável dependente y e todas as suas derivadas
são do primeiro grau, isto é, a potência de cada
termo envolvendo y é igual a 1.
ii. Cada coeficiente da equação é função apenas da
variável independente (normalmente x).
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ Exemplos:
✓ y𝑦′′ − 2𝑦′ = 𝑥 𝑦′′ + 𝑦² = 0
Lineares
𝑦′′ + 4𝑦 = 𝑒−𝑥𝑠𝑒𝑛𝑥𝑥2 − 3𝑥 𝑦′′ + 𝑥𝑦′ − 𝑥 + 3 𝑦 = 02𝑥2𝑦′′ + 3𝑥𝑦′ −
𝑦 = 7
Não lineares
y𝑦′′ − 2𝑦′ = 𝑥𝑦′′ + 𝑦 = 0𝑦′′ + 𝑦² = 0
O coeficiente
depende de y
Potência
diferente de 1
-
6/6/2019
5
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ As EDOs lineares de segunda ordem podem ser
classificadas em homogêneas, quando r(x) = 0, ou
heterogêneas, no caso contrário.
✓ Exemplos:
Homogêneas
𝑥2 − 3𝑥 𝑦′′ + 𝑥𝑦′ − 𝑥 + 3 𝑦 = 0𝑦′′ − 2𝑦′ + 𝑦 = 0𝑥2𝑦′′ + 𝑥𝑦′ − 𝑦
= 0
Heterogêneas
𝑦′′ + 4𝑦 = 𝑒−𝑥𝑠𝑒𝑛𝑥2𝑥2𝑦′′ + 3𝑥𝑦′ − 𝑦 = 7𝑦′′ − 7y′ + 12𝑦 =
𝑐𝑜𝑠𝑥
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.1 Introdução
✓ Observação:
• Uma função Y(x) constitui uma solução de uma EDO
de segunda ordem (linear ou não), em um dado
intervalo, se essa função for duas vezes derivável em
todo o intervalo considerado, e se ela e suas derivadas
ao serem substituídas na equação a transformem em
uma identidade.
• No presente estudo, supõe-se que a variável
independente (normalmente, x) é definida em um
intervalo arbitrariamente fixado (intervalo finito ou
todo o eixo x); assim, não é necessário especificar em
cada caso tal intervalo, ficando isso por conta do leitor.
-
6/6/2019
6
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
II – EDOs de Segunda Ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Novas soluções de equações lineares homogêneas
podem ser obtidas simplesmente a partir de soluções
conhecidas, mediante a multiplicação por constantes
e/ou adição dessas últimas, facilitando, sobremaneira, a
solução de equações complexas. Tal propriedade pode
ser caracterizada pelo seguinte teorema.
✓ Teorema fundamental. (1) Se uma solução da equação
diferencial linear homogênea é multiplicada por
qualquer constante, a função resultante é também uma
solução da equação. (2) Se duas soluções da equação
são adicionadas, a soma resultante é também uma
solução da equação.
2.2 Equações Lineares Homogêneas
-
6/6/2019
7
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Demonstração de (1). Se Y(x) é uma solução da
equação diferencial ordinária homogênea de
segunda ordem 𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 𝑦 = 0,substituindo-se cY(x) e
suas derivadas na equação,
onde c é uma constante, tem-se que:
(𝑐𝑌)′′ + 𝑓 (𝑐𝑌)′ + 𝑔 (𝑐𝑌) = 0 ∴
𝑐𝑌′′ + 𝑓𝑐𝑌′ + 𝑔𝑐𝑌 = 𝑐(𝑌′′ + 𝑓𝑌′ + 𝑔𝑌) = 0
Como Y(x), por ser solução da equação diferencial,
satisfaz-lhe, a expressão entre parênteses é nula, o
que demonstra a primeira parte do teorema.
2.2 Equações Lineares Homogêneas
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Demonstração de (2). Se Y(x) e Z(x) são soluções da
equação diferencial ordinária homogênea de segunda
ordem 𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 𝑦 = 0, substituindo-seY 𝑥 + 𝑍(𝑥) e suas
derivadas na equação, tem-se que:
(𝑌 + 𝑍)′′ + 𝑓 (𝑌 + 𝑍)′ + 𝑔 (𝑌 + 𝑍) = 0 ∴
∴ 𝑌′′ + 𝑍′′ + 𝑓𝑌′ + 𝑓𝑍′ + 𝑔𝑌 + 𝑔𝑍 = 0 ∴
∴ 𝑌′′ + 𝑓𝑌′ + 𝑔𝑌 + (𝑍′′ + 𝑓𝑍′ + 𝑔𝑍) = 0
Como Y(x) e Z(x), por serem soluções da equação
diferencial, satisfazem-na, as expressões entre
parênteses são nulas, o que demonstra a segunda parte
do teorema.
2.2 Equações Lineares Homogêneas
-
6/6/2019
8
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ No caso das equações diferenciais lineares com
coeficientes constantes, dois conceitos são de
fundamental importância:
• Solução geral: é uma solução de uma EDO de
segunda ordem (linear ou não) que contém duas
constantes arbitrárias, as quais devem ser
independentes, ou seja, a mesma solução não pode
ser reduzida a uma forma contendo somente uma
constante arbitrária ou nenhuma.
• Solução particular: quando são atribuídos valores
definidos às duas constantes da solução geral.
2.2 Equações Lineares Homogêneas
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Se y1(x) e y2(x) são soluções da equação diferencial
linear
𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 𝑦 = 0
em um dado intervalo I, então
𝑦 𝑥 = 𝑐1𝑦1(𝑥) +𝑐2 𝑦2(𝑥),
onde c1 e c2 são constantes arbitrárias, será uma
solução geral da equação no intervalo I, desde que
ela não possa ser reduzida a uma expressão
contendo menos que duas constantes arbitrárias.
2.2 Equações Lineares Homogêneas
-
6/6/2019
9
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ As funções y1(x) e y2(x) são ditas linearmente
dependentes em um intervalo I onde ambas são
definidas, se elas são proporcionais nesse intervalo,
ou seja, 𝑦1 𝑥 = 𝑘𝑦2(𝑥) ou 𝑦2 𝑥 = 𝑙𝑦1(𝑥) , paraqualquer x em I,
onde k e l são números.
✓ Se tais funções não são proporcionais em I elas recebem a
denominação de linearmente independentes no intervalo.
✓ Sistema fundamental: Duas soluções linearmente
independentes da EDOLH no intervalo I onde são
definidas, constituem um sistema fundamental de soluções
em I, o que embasa o teorema formulado a seguir.
2.2 Equações Lineares Homogêneas
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Teorema. A solução
𝑦 𝑥 = 𝑐1𝑦1(𝑥) +𝑐2 𝑦2(𝑥),
✓ constitui uma solução geral da EDOLH em um
intervalo I, se, e somente se, as funções y1(x) e y2(x)
constituírem um sistema fundamental de soluções
da equação em I.
✓ y1(x) e y2(x) constituem um sistema fundamental de
soluções da equação em I, se, e somente se, o
quociente entre ela, y1(x)/y2(x) [y2(x)≠ 0] não forconstante em
I, mas depender de x.
2.2 Equações Lineares Homogêneas
-
6/6/2019
10
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Exemplo 01. As funções
𝑦1 𝑥 = 𝑒𝑥 e 𝑦2 𝑥 = 𝑒
−2𝑥,
✓ são soluções independentes da equação
✓ 𝑦′′ + 𝑦′ − 2𝑦 = 0.
✓ Como o seu quociente não é constante, pois
✓ 𝑦1 𝑥 /𝑦2 𝑥 =𝑒𝑥
𝑒−2𝑥= 𝑒3𝑥,
✓ então, tais soluções formam um sistema fundamental,
e a solução geral correspondente para qualquer x é:
✓ 𝑦 𝑥 = 𝑐1𝑦1 𝑥 + 𝑐2𝑦2 𝑥 = 𝑐1𝑒𝑥 + 𝑐2𝑒
−2𝑥
2.2 Equações Lineares Homogêneas
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Exemplo 02. As funções
𝑦1 𝑥 = 𝑒𝑥 e 𝑦2 𝑥 = 3𝑒
𝑥,
✓ não são soluções independentes da equação
✓ 𝑦′′ + 𝑦′ − 2𝑦 = 0.
✓ Como o seu quociente é constante, pois
✓ 𝑦1 𝑥 /𝑦2 𝑥 =𝑒𝑥
3𝑒𝑥=
1
3,
✓ então, tais soluções não constituem um sistema
fundamental e, assim, a combinação entre elas não
formará uma solução geral.
2.2 Equações Lineares Homogêneas
-
6/6/2019
11
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
II – EDOs de Segunda Ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ A equação diferencial homogênea da forma
𝑦′′ + 𝑎𝑦′ + 𝑏𝑦 = 0,
onde a e b são constantes, é denominada equação
diferencial de segunda ordem homogênea com
coeficientes constantes.
✓ Supondo-se que a e b são reais e que o intervalo de
variação de x é o próprio eixo x, por analogia com a
equação diferencial homogênea de primeira ordem
com coeficientes constantes
𝑦′ + 𝑘𝑦 = 0,
2.3 EDOH - Coeficientes Constantes
-
6/6/2019
12
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ cuja solução geral é a função exponencial
𝑦(𝑥) = 𝑐𝑒−𝑘𝑥,
✓ Pode-se supor, portanto, que
𝑦(𝑥) = 𝑐𝑒𝜆𝑥,
✓ é uma solução da EDO de segunda ordem
apresentada, desde que 𝜆 seja adequadamenteescolhido.
2.3 EDOH - Coeficientes Constantes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Substituindo-se y e suas derivadas (𝑦′ = 𝜆𝑒𝜆𝑥 , 𝑦′′ =
𝜆2𝑒𝜆𝑥) na equação, obtém-se
𝜆2𝑒𝜆𝑥 + 𝑎𝜆𝑒𝜆𝑥 + 𝑏𝑒𝜆𝑥 = 0
𝜆2 + 𝑎𝜆 + 𝑏 𝑒𝜆𝑥 = 0
✓ Então y(x) será uma solução da equação diferencial se
segunda ordem se 𝜆 for uma solução da equação desegundo grau
𝜆2 + 𝑎𝜆 + 𝑏 = 0,
✓ denominada equação característica ou equação
auxiliar da EDO de segunda ordem, com as seguintes
raízes:
2.3 EDOH - Coeficientes Constantes
-
6/6/2019
13
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ 𝜆1 =1
2−𝑎 + 𝑎2 − 4𝑏
✓ 𝜆2 =1
2−𝑎 − 𝑎2 − 4𝑏
✓ Logo, as funções
𝑦1(𝑥) = 𝑒𝜆1𝑥 e 𝑦2(𝑥) = 𝑒
𝜆2𝑥
✓ são soluções da EDO homogênea de segunda ordem.
✓ Sendo a equação característica de segundo grau, e
pelo fato de a e b serem números reais, a sua solução
pode recair em três casos, conforme as raízes sejam
reais e diferentes, complexas conjugadas ou reais e
iguais.
2.3 EDOH - Coeficientes Constantes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
i. Duas raízes reais e distintas;
ii. Duas raízes complexas conjugadas;
iii. Duas raízes reais e iguais.
✓ Caso I - Duas raízes reais e distintas
• Exemplo 01: Determinar as soluções da equação
𝑦′′ + 𝑦′ − 2𝑦 = 0
✓ Equação característica: 𝜆2 + 𝜆 − 2 = 0
✓ Raízes: 𝜆1 = 1 e 𝜆2 = −2
✓ Soluções: 𝑦1 = 𝑒𝜆1𝑥 = 𝑒𝑥 e 𝑦2 = 𝑒
𝜆2𝑥 = 𝑒−2𝑥
✓ Solução geral: y 𝒙 = 𝒄𝟏𝒆𝒙 + 𝒄𝟐𝒆
−𝟐𝒙
2.3 EDOH - Coeficientes Constantes
-
6/6/2019
14
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
• Exemplo 02: Determinar as soluções da equação
2𝑦′′ − 5𝑦′ − 3𝑦 = 0
✓ Equação característica: 𝜆2 −5
2𝜆 −
3
2= 0
✓ Raízes: 𝜆1 = −1
2e 𝜆2 = 3
✓ Soluções: 𝑦1 = 𝑒𝜆1𝑥 = 𝑒− Τ𝑥 2 e 𝑦2 = 𝑒
𝜆2𝑥 = 𝑒3𝑥
✓ Solução geral: y 𝒙 = 𝒄𝟏𝒆Τ−𝒙 𝟐 + 𝒄𝟐𝒆
𝟑𝒙
2.3 EDOH - Coeficientes Constantes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Caso II - Duas raízes complexas conjugadas
✓ Raízes: 𝜆1 = 𝑝 + 𝑖𝑞 e 𝜆2 = 𝑝 − 𝑖𝑞
✓ Soluções particulares: 𝑦1 = 𝑒𝑝+𝑖𝑞 𝑥 e 𝑦2 = 𝑒
(𝑝−𝑖𝑞)𝑥
✓ Soluções reais:
✓ Fórmulas de Euler ቊ 𝑒𝑖𝜃 = cos𝜃 + 𝑖𝑠𝑒𝑛 𝜃
𝑒−𝑖𝜃 = cos 𝜃 − 𝑖𝑠𝑒𝑛𝜃
✓ Fazendo 𝜃 = 𝑞𝑥
✓ ൝𝑦1 = 𝑒
𝑝+𝑖𝑞 𝑥 = 𝑒𝑝𝑥𝑒𝑖𝑞𝑥 = 𝑒𝑝𝑥(cos𝑞𝑥 + 𝑖𝑠𝑒𝑛 𝑞𝑥)
𝑦2 = 𝑒𝑝−𝑖𝑞 𝑥 = 𝑒𝑝𝑥𝑒−𝑖𝑞𝑥 = 𝑒𝑝𝑥(cos 𝑞𝑥 − 𝑖𝑠𝑒𝑛 𝑞𝑥)
2.3 EDOH - Coeficientes Constantes
-
6/6/2019
15
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Como 𝑦1 e 𝑦2 são soluções da equação, então
✓ 𝑦1 + 𝑦2 = 𝑒𝑝𝑥(2cos𝑞𝑥) ∴
1
2(𝑦1 + 𝑦2) = 𝑒
𝑝𝑥(cos 𝑞𝑥)
✓ 𝑦1 − 𝑦2 = 𝑒𝑝𝑥(2𝑖𝑠𝑒𝑛 𝑞𝑥) ∴
1
2𝑖(𝑦1 − 𝑦2) = 𝑒
𝑝𝑥(𝑠𝑒𝑛 𝑞𝑥)
✓ também são soluções, com os segundos membros
reais; ademais, como o seu quociente não é constante,
elas são linearmente independentes em qualquer
intervalo, constituindo-se, portanto, em um sistema
fundamental de soluções em todo o eixo dos x. Dessa
forma, a solução geral correspondente é
✓ 𝑦 𝑥 = 𝑒𝑝𝑥 𝐴𝑐𝑜𝑠 𝑞𝑥 + 𝐵𝑠𝑒𝑛 𝑞𝑥 , ✓ onde A e B são constantes
arbitrárias.
2.3 EDOH - Coeficientes Constantes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 01: Determinar a solução geral da equação
𝑦′′ − 2𝑦′ + 10 = 0
✓ Equação característica: 𝜆2 − 2𝜆 + 10 = 0
✓ Soluções: 𝑦1,2 =− −2 ± −2 2− 4 1 10
2 1= 1 ± 3𝑖
✓ ቊ𝑦1 = 𝑝 + 𝑞𝑖 = 1 + 3𝑖𝑦2 = 𝑝 − 𝑞𝑖 = 1 − 3𝑖
→ 𝑝 = 1 , 𝑞 = 3
✓ Solução geral: 𝑦 𝑥 = 𝑒𝑝𝑥 𝐴𝑐𝑜𝑠 𝑞𝑥 + 𝐵𝑠𝑒𝑛 𝑞𝑥
✓ 𝒚 𝒙 = 𝒆𝒙 𝑨𝒄𝒐𝒔 𝟑𝒙 + 𝑩𝒔𝒆𝒏 𝟑𝒙
-
6/6/2019
16
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 02: Resolver o problema de valor inicial
𝑦′′ − 2𝑦′ + 10 = 0; 𝑦 0 = 4, 𝑦′ 0 = 1
𝑦 𝑥 = 𝑒𝑥 𝐴𝑐𝑜𝑠 3𝑥 + 𝐵𝑠𝑒𝑛 3𝑥
𝑦 0 = 4 → 𝑒0 𝐴𝑐𝑜𝑠 0 + 𝐵𝑠𝑒𝑛 0 = 4 ∴ 𝑨 = 𝟒
𝑦′ 𝑥 = 𝑒𝑥 𝐴𝑐𝑜𝑠 3𝑥 + 𝐵𝑠𝑒𝑛 3𝑥 +
+ 𝑒𝑥 −3𝐴𝑠𝑒𝑛 3𝑥 + 3𝐵𝑐𝑜𝑠 3𝑥
= 𝑒𝑥[ 𝐴 + 3𝑏 cos 3𝑥 + 𝐵 − 3𝑎 𝑠𝑒𝑛 3𝑥)]
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
𝑦′ 0 = 1 →
𝑦′ 0 = 𝑒0[ 𝐴 + 3𝐵 cos 0 + 𝐵 − 3𝐴 𝑠𝑒𝑛 0)] = 1 ∴
∴ 𝐴 + 3𝐵 = 1 ∴ 4 + 3𝐵 = 1 ∴ 𝑩 = −𝟏
Solução particular:
𝑦 𝑥 = 𝑒𝑥 𝐴𝑐𝑜𝑠 3𝑥 + 𝐵𝑠𝑒𝑛 3𝑥 ∴
∴ 𝒚 𝒙 = 𝒆𝒙 𝟒𝒄𝒐𝒔 𝟑𝒙 − 𝒔𝒆𝒏 𝟑𝒙
-
6/6/2019
17
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Caso III - Duas raízes reais e iguais
𝑦′′ + 𝑎𝑦′ + 𝑏𝑦 = 0
Δ = 𝑎2 − 4 1 𝑏 = 0 → 𝑏 = Τ𝑎2 4
✓ Raízes: 𝜆1 = 𝜆2 = 𝜆 = −𝑎
2
✓ Solução única, a princípio: 𝑦1(𝑥) = 𝑒𝜆𝑥 = 𝑒 Τ−𝑎𝑥 2
✓ Solução y2 – usar o método da variação dos
parâmetros a partir de
✓ 𝑦2 𝑥 = 𝑢 𝑥 𝑦1 𝑥
✓
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ 𝑦2 = 𝑢𝑦1;
✓ 𝑦2′ = 𝑢′𝑦1 + 𝑢𝑦1
′ ;
✓ 𝑦2′′ = 𝑢′′𝑦1 + 𝑢
′𝑦1′ + 𝑢′𝑦1
′ + 𝑢𝑦1′′
✓ = 𝑢′′𝑦1 + 2𝑢′𝑦1
′ + 𝑢𝑦1′′
✓ Substituindo-se 𝑦2, suas derivadas e o valor de b naequação
diferencial, tem-se:
✓ 𝑢 𝑦1′′ + 𝑎𝑦1
′ +1
4𝑎2𝑦1 + 𝑢
′ 2𝑦1′ + 𝑎𝑦1 +
+ 𝑢′′𝑦1 = 0
✓ Como y1 é uma solução, a expressão dentro do
primeiro parênteses é nula.
-
6/6/2019
18
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Com 𝑦1 = 𝑒Τ−𝑎𝑥 2, então 2𝑦1
′ = 2 −𝑎
2𝑒 Τ−𝑎𝑥 2 , o
que torna a expressão dentro do segundo parênteses
também nula, e a equação fica reduzida a
✓ 𝑢′′𝑦1 = 0 → 𝑢′′ = 0.
✓ Então, uma solução será
✓ 𝑢 = 𝑥
✓ e, consequentemente,
✓ 𝑦2 𝑥 = 𝑥𝑒𝜆𝑥
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Teorema. No caso da equação característicapossuir raízes reais
e iguais, as funções 𝑦1 e 𝑦2são soluções da EDOH e constituem um
sistemafundamental.
• A solução geral será
✓ 𝑦 𝑥 = (𝑐1 + 𝑐2𝑥)𝑒𝜆𝑥 ,
✓ onde 𝜆 = −𝑎
2
-
6/6/2019
19
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 01. Resolver a seguinte equação
diferencial
✓ 𝑦′′ − 10𝑦′ + 25𝑦 = 0
✓ Solução:
✓ 𝑎 = −10 𝑒 𝑏 =25
✓ Equação característica: 𝜆2 − 10𝜆 − 25 = 0
✓ Raízes: 𝜆1 = 𝜆2 = −𝑎
2= −
−10
2= 5
Solução geral: 𝑦 𝑥 = 𝑐1 + 𝑐2𝑥 𝑒𝜆𝑥 ∴
✓ ∴ 𝒚 𝒙 = (𝒄𝟏 + 𝒄𝟐𝒙)𝒆𝟓𝒙
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 02. Resolver a seguinte equação
diferencial
✓ 𝑦′′ + 8𝑦′ + 16𝑦 = 0
✓ Solução:
✓ 𝑎 = 8 𝑒 𝑏 = 16
✓ Equação característica: 𝜆2 + 8𝜆 + 16 = 0
✓ Raízes: 𝜆1 = 𝜆2 = −𝑎
2= −
8
2= −4
Solução geral: 𝑦 𝑥 = 𝑐1 + 𝑐2𝑥 𝑒𝜆𝑥 ∴
✓ ∴ 𝒚 𝒙 = (𝒄𝟏 + 𝒄𝟐𝒙)𝒆−𝟒𝒙
-
6/6/2019
20
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Aplicações - Movimento harmônico simples ou
Movimento livre sem amortecimento.
• Considera-se uma mola comum que resiste tanto à
compressão quanto à distensão.
• A mola, presa a um suporte fixo, é suspensa
verticalmente.
• Na extremidade inferior da mola se pendura um corpo,
cuja massa m é muito maior que a massa da mola
(despreza-se essa última).
• Se o corpo é puxado para baixo de uma certa distância e
então liberado, ele passa a se movimentar verticalmente,
indefinidamente (sistema ideal).
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Deseja-se determinar o movimento do sistema
mecânico, ou seja, o deslocamento do corpo em
função do tempo.
• Considera-se, portanto, as forças que agem sobre o
corpo durante o movimento, com o sentido positivo
para baixo.
• Uma das forças agindo sobre o corpo é a atração da
gravidade:
𝑃 = 𝑚𝑔
onde m é a massa do corpo e g a intensidade de
aceleração da gravidade (g = 9,8 m/s²).
-
6/6/2019
21
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• A outra força agindo sobre o corpo é a força da mola,
que passa a existir quando esta é deformada
(distendida), experimentalmente verificada como
proporcional à sua deformação:
𝐹 = 𝑘𝑠 (Lei de Hooke)
onde s é o alongamento e k (constante de
proporcionalidade) o módulo da mola (quanto mais
rígida a mola maior será o valor de k).
• Corpo em repouso (posição de equilíbrio estático) →
aresultante das forças é nula. Assim,
𝐹 = 𝑃 ∴ 𝑘𝑠 = 𝑚𝑔
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Designa-se 𝑦 = 𝑦(𝑡), o deslocamento do corpo apartir de sua
posição de equilíbrio estático, com o
sentido positivo para baixo.
y
mola nãodistendida
-
6/6/2019
22
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Da lei de Hooke, tem-se que a força da mola que
corresponde a um deslocamento y é
𝐹𝑀 = 𝐹 − 𝑘𝑦 = −𝑘𝑠 − 𝑘𝑦
• A resultante das forças que atuam no corpo será
𝑅 = 𝑃 + 𝐹𝑀 = 𝑚𝑔 − 𝑘𝑠 − 𝑘𝑦,
• Mas, como 𝑘𝑠 = 𝑚𝑔, a equação se transforma em
𝑅 = −𝑘𝑦
• Sistema não amortecido. Se o amortecimento do
sistema é tão pequeno que pode ser desprezível, a
equação anterior corresponde à resultante de todas as
forças que agem sobre o corpo.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Da segunda lei de Newton, obtém-se a equação
diferencial que rege o movimento, ou seja,
𝐹𝑜𝑟ç𝑎 = 𝑚𝑎𝑠𝑠𝑎 𝑥 𝑎𝑐𝑒𝑙𝑒𝑟𝑎çã𝑜
• A força significa a resultante das forças que agem sobre
o corpo em um dado instante (𝑅) e a aceleraçãocorresponde à
variação da velocidade com o tempo
( Τሷ𝑦 = 𝑑2𝑦 𝑑𝑡²). Então
𝑚 ሷ𝑦 = −𝑘𝑦 ∴ 𝑚 ሷ𝑦 + 𝑘𝑦 = 0 ∴ ሷ𝑦 +𝑘
𝑚𝑦 = 0
ou
ሷ𝒚 + 𝒘𝟐𝒚 = 𝟎
em que 𝑤² = Τ𝑘 𝑚.
-
6/6/2019
23
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• A EDOH com coeficientes constantes descreve um
movimento harmônico simples ou movimento livre
sem amortecimento.
• Solução geral da equação:
𝑦 𝑡 = 𝐴 cos𝑤𝑡 + 𝐵 sin𝑤𝑡
• Os coeficientes, A e B, são determinados por duas
duas condições iniciais óbvias:
• 𝑦(0) = 𝛼, representando o deslocamento inicial;
• 𝑦′(0) = 𝛽, representando a velocidade inicial.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Ou seja
𝛼
< 0Massa solta de um ponto acima daposição de equilíbrio
= 0 Massa solta do ponto de equilíbrio
> 0Massa solta de um ponto abaixo daposição de equilíbrio
𝛽
< 0Massa com velocidade inicial dirigida paracima
= 0 Massa simplesmente solta
> 0Massa com velocidade inicial dirigida parabaixo
-
6/6/2019
24
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Período de vibrações livres do movimento:
𝑇 = Τ2𝜋 𝑤 (período natural)
• Frequência:
𝑓 = Τ𝑤 2𝜋 (frequência natural)
• y(t) pode ser escrita como
𝑦(𝑡) = 𝐶 cos(𝑤𝑡 − 𝛿)
tan 𝛿 =𝐵
𝐴
𝐶 = 𝐴2 + 𝐵2
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
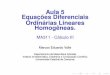
• Exemplo 01. Resolva e interprete o PVI
ሷ𝑦 + 16𝑦 = 0, 𝑦 0 = 10, ሶ𝑦 0 = 0
• Solução:
𝑤 = 16 = 4
𝑦 𝑡 = 𝐴 cos𝑤𝑡 + 𝐵 sin𝑤𝑡
𝑦 𝑡 = 𝐴 cos 4𝑡 + 𝐵 sin 4𝑡
𝑦 0 = 10 → 10 = 𝐴 cos 0 + 𝐵 sin 0 → 𝐴 = 10
ሶ𝑦 0 = 0 → 0 = −𝐴4sin 0 + 𝐵4cos 0 → 𝐵 = 0
𝒚 𝒕 = 𝟏𝟎 𝐜𝐨𝐬𝟒𝒕.
𝑦 𝑡 = 𝐶 cos 4𝑡 − 𝛿 = 10cos(4𝑡 − 0)
-
6/6/2019
25
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
Movimento harmônico simples ou movimento livre sem
amortecimento.
A = 10
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 02. Uma massa de 2 kg distende uma mola em
6 cm. No instante t = 0, a massa é solta de um ponto a 8
cm abaixo da posição de equilíbrio com uma velocidade
direcionada para cima de 25 cm/s. Determine a função
y(t) que descreve o movimento livre subsequente.
• Solução:
ሷ𝑦 + 𝑤2𝑦 = 0, 𝑦 0 = 8 𝑐𝑚, ሶ𝑦 0 = −25 cm/s
𝑦 𝑡 = 𝐴 cos𝑤𝑡 + 𝐵 sin𝑤𝑡
𝑃 = 𝐹𝑀 ∴ 𝑚𝑔 = 𝑘𝑠 ∴𝑘
𝑚=
𝑔
𝑠=
9,8
6∴
𝑘
𝑚= 1,63
𝑤2 = Τ𝑘 𝑚 ∴ 𝑤 = 1,63 = 1,28
𝑦 𝑡 = 𝐴 cos 1,28𝑡 + 𝐵 sin 1,28𝑡
1𝑁=1𝑘𝑔𝑥𝑚/𝑠
²
-
6/6/2019
26
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
𝑦 𝑡 = 𝐴 cos 1,28𝑡 + 𝐵 sin 1,28𝑡
𝑦 0 = 8 → 8 = 𝐴 cos0 + 𝐵 sin 0 ∴ 𝐴 = 8
ሶ𝑦 0 = −25 → −25 = −1,28 ∙ 𝐴 sin 0 + 1,28 ∙ 𝐵 cos 0 ∴
1,28 ∙ 𝐵 = −25 ∴ 𝐵 = −19,53
𝒚 𝒕 = 𝟖𝐜𝐨𝐬 𝟏, 𝟐𝟖𝒕 − 𝟏𝟗, 𝟓𝟑 𝐬𝐢𝐧 𝟏, 𝟐𝟖𝒕
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Aplicações – Sistema amortecido.
• Se no sistema massa-mola, anteriormente estudado, for
ligado um amortecedor à massa, tem-se que levar em
conta o amortecimento viscoso correspondente.
• A força de amortecimento possui sentido oposto ao do
movimento, e supor-se-á que a mesma é proporcional à
velocidade ሶ𝑦 = Τ𝑑𝑦 𝑑𝑡 da massa (para pequenasvelocidades esta
hipótese constitui, em geral, uma boa
aproximação).
• Assim, a força de amortecimento é dada por
𝐹𝐴 = −𝑐 ሶ𝑦,onde c, denominada constante de amortecimento é >
0.
-
6/6/2019
27
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Agora, a resultante das forças que agem sobre a massa
é
𝑅 = 𝑃 + 𝐹𝑀 + 𝐹𝐴 = 𝑚𝑔 − 𝑘𝑠 − 𝑘𝑦 − 𝑐 ሶ𝑦 = −𝑘𝑦 − 𝑐 ሶ𝑦
• Da segunda lei de Newton, obtém-se
𝑚 ሷ𝑦 = −𝑘𝑦 − 𝑐 ሶ𝑦
• Portanto, o movimento do sistema mecânico
amortecido é regido por uma EDO linear com
coeficientes constantes, da forma
𝑚 ሷ𝑦 + 𝑐 ሶ𝑦 + 𝑘𝑦 = 0 ou ሷ𝑦 +𝑐
𝑚ሶ𝑦 +
𝑘
𝑚𝑦 = 0 ,
cuja solução dependerá das raízes da equação
característica, conforme a seguir:
𝑘𝑠 = 𝑚𝑔
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Equação característica:
𝜆2 +𝑐
𝑚𝜆 +
𝑘
𝑚= 0
• Raízes:
𝜆1,2 =𝑐
2𝑚±
1
2𝑚𝑐2 − 4𝑚𝑘
• Notação abreviada:
𝛼 =𝑐
2𝑚e β =
1
2𝑚𝑐2 − 4𝑚𝑘
Então, as raízes podem ser escritas sob a forma
𝜆1 = −𝛼 + 𝛽 e 𝜆2 = −𝛼 − 𝛽
-
6/6/2019
28
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• A solução dependerá do nível do amortecimento, nos
três seguintes casos:
Caso I. 𝑐2 > 4𝑚𝑘. Raízes reais
distintas.(Superamortecimento).
Caso II. 𝑐2 < 4𝑚𝑘. Raízes conjugadas
complexas.(Subamortecimento).
Caso III. 𝑐2 = 4𝑚𝑘. Raiz dupla real.(Amortecimento crítico).
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Caso I. Superamortecimento. Neste caso, o
coeficiente de amortecimento, c, é grande, de tal
forma que 𝑐2 > 4𝑚𝑘, e a solução geral da EDO é
𝑦 𝑡 = 𝑐1𝑒− 𝛼−𝛽 𝑡 + 𝑐2𝑒
− 𝛼+𝛽 𝑡.
- O corpo não oscila
- Para t > 0, os expoentes da solução são negativos,
pois 𝛼 > 0, 𝛽 > 0 e 𝛽2 = 𝛼2 − Τ𝑘 𝑚 < 𝛼2 . Assim,ambos
os termos da solução se aproximam de zero
quando t tende para o infinito.
- Então, após um tempo suficientemente longo, a massa
se encontrará em repouso na posição de equilíbrio
estático (y = 0).
-
6/6/2019
29
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 01. Uma massa de 2 kg distende uma mola
(constante elástica, k, igual a 800 N/m). No instante t =
0, a massa é solta de um ponto a 1 cm abaixo da posição
de equilíbrio, com uma velocidade direcionada para
baixo de 1 cm/s. A massa é acoplada a um dispositivo de
amortecimento (coeficiente de amortecimento, c, igual a
1000 N.s/m). Determine a função y(t) que descreve o
movimento amortecido subsequente.
• Solução:
• ሷ𝑦 +𝑐
𝑚ሶ𝑦 +
𝑘
𝑚𝑦 = 0 ∴ ሷ𝑦 +
10
2ሶ𝑦 +
8
2𝑦 = 0 ∴
• ሷ𝑦 + 5 ሶ𝑦 + 4𝑦 = 0 𝑦 0 = 1 𝑐𝑚, ሶ𝑦 0 = 1 𝑐𝑚/𝑠
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
•𝜆2 + 5𝜆 + 4 = 0 → 𝜆1 = −1 e 𝜆2 = −4
𝒚 𝒕 = 𝒄𝟏𝒆−𝒕 + 𝒄𝟐𝒆
−𝟒𝒕
• ሶ𝑦 0 = −𝑐1𝑒−𝑡 −4𝑐2 𝑒
−4𝑡
•ቊ𝑦 0 = 1 → 1 = 𝑐1 + 𝑐2ሶ𝑦 0 = 1 → 1 = −𝑐1 −4𝑐2
→ 𝑐1 =5
3e 𝑐2 = −
2
3
𝒚 𝒕 =𝟓
𝟑𝒆−𝒕 −
𝟐
𝟑𝒆−𝟒𝒕
• Para velocidades negativa e nula (Comparando):
- Para ሶ𝑦 0 = −1: 𝒚 𝒕 = 𝒆−𝒕
- Para ሶ𝑦 0 = 0: 𝒚 𝒕 =𝟒
𝟑𝒆−𝒕 −
𝟏
𝟑𝒆−𝟒𝒕
-
6/6/2019
30
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
Movimentos típicos no caso superamortecido,
com deslocamento inicial positivo (para baixo)
> 0
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Caso II. Subamortecimento. Neste caso, o
coeficiente de amortecimento, 𝑐 , é suficientementepequena para
que 𝑐2 < 4𝑚𝑘, e a solução geral daEDO é
𝑦 𝑡 = 𝑒−𝛼𝑡(𝐴 cos𝑤∗𝑡 + 𝐵 sin𝑤∗𝑡) ou
𝑦 𝑡 = 𝐶𝑒−𝛼𝑡 cos 𝑤∗𝑡 − 𝛿 ,
onde
𝑤∗ =1
2𝑚4𝑚𝑘 − 𝑐2, 𝐶 = 𝐴2 + 𝐵2, tan 𝛿 = Τ𝐵 𝐴
- A frequência é 𝑤∗/2𝜋 ciclos/s.
- Quanto menor for c (c > 0), maior será 𝑤∗ e maisrápidas se
tornam as oscilações.
-
6/6/2019
31
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
- À medida que c se aproxima de zero, 𝑤∗ se
aproxima do valor 𝑤 = Τ𝑘 𝑚, que corresponde àoscilação
harmônica.
• Exemplo 02. Um corpo com massa de 0,5 kg é fixado
a uma mola de 1,5 m de comprimento. Na posição de
equilíbrio, o comprimento da mola é de 2,48 m. Se o
corpo for suspenso e solto a partir do repouso de um
ponto 2 m acima da posição de equilíbrio, encontre o
deslocamento y(t) se é sabido ainda que o meio
ambiente oferece resistência numericamente igual à
velocidade instantânea.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Solução: O alongamento da mola depois que o peso é
fixado é igual a 2,48 – 1,5 = 0,98 m. Da lei de Hooke,
mg = ks ou 0,5(9,8) = k(0,98) ou k = 5 N/m.
• ሷ𝑦 +𝑐
𝑚ሶ𝑦 +
𝑘
𝑚𝑦 = 0 ∴ ሷ𝑦 +
1
0,5ሶ𝑦 +
5
0,5𝑦 = 0 ∴
• ሷ𝒚 + 𝟐 ሶ𝒚 + 𝟏𝟎𝒚 = 𝟎, 𝐲 𝟎 = −𝟐, ሶ𝒚 𝟎 = 𝟎
• 𝑤∗ =1
2𝑚4𝑚𝑘 − 𝑐2 = 3; 𝛼 =
𝑐
2𝑚= 1
•𝑦 𝑡 = 𝑒−𝑡(𝐴 cos 3𝑡 + 𝐵 sin 3𝑡)
•y 0 = −2 → 𝐴 = −2
• ሶ𝑦 0 = 0 → 𝐵 = −2
3
•𝒚 𝒕 = 𝒆−𝒕(−𝟐 𝐜𝐨𝐬𝟑𝒕 −𝟐
𝟑𝐬𝐢𝐧 𝟑𝒕)
-
6/6/2019
32
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
Movimentos típicos no caso subamortecido,
com deslocamento inicial negativo (para cima)
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Caso III. Amortecimento crítico. Neste caso, o
coeficiente de amortecimento, 𝑐 , é suficientementepequena para
que 𝑐2 = 4𝑚𝑘, e a solução geral da EDOé
𝑦 𝑡 = (𝑐1𝑡 + 𝑐2)𝑒−𝛼𝑡
- Como a função exponencial nunca é nula, e a
expressão (𝑐1𝑡 + 𝑐2) pode ter no máximo um zero, oque levará o
movimento apresentar somente uma
passagem pela posição de equilíbrio (y = 0).
- Se as condições iniciais 𝑐1 e 𝑐2 possuem o mesmosinal, tal
passagem não se produz, o que levará a uma
situação semelhante ao Caso I.
-
6/6/2019
33
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 03. Um corpo com massa de 0,25 kg é
fixado a uma mola com constante de elasticidade igual
a 4 N/cm. Supondo que uma força de amortecimento
igual ao dobro da velocidade instantânea atua no
sistema, determine a equação de movimento se a
massa parte da posição de equilíbrio com velocidade
de 3 cm/s para cima.
• Solução:
• ሷ𝑦 +𝑐
𝑚ሶ𝑦 +
𝑘
𝑚𝑦 = 0 ∴ ሷ𝑦 +
2
0,25ሶ𝑦 +
4
0,25𝑦 = 0
• ∴ ሷ𝑦 + 8 ሶ𝑦 + 16𝑦 = 0, y 0 = 0, ሶ𝑦 0 = −3
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
•𝜆2 + 8𝜆 + 16 = 0 → 𝜆1 = 𝜆2 = 4
𝒚 𝒕 = (𝒄𝟐𝒕 + 𝒄𝟏)𝒆−𝟒𝒕
• ሶ𝑦 0 = 𝑐2𝑒−4𝑡 −4(𝑐2 𝑡 + 𝑐1)𝑒
−4𝑡
•ቊ𝑦 0 = 0 → 0 = 𝑐1ሶ𝑦 0 = −3 → −3 = 𝑐2 −4𝑐1
→ 𝑐2 = −3
𝒚 𝒕 = −𝟑𝒕𝒆−𝟒𝒕
-
6/6/2019
34
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
Movimentos típicos no caso de amortecimento crítico, com
deslocamento inicial nulo e velocidades iniciais negativa e
positiva.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Equação de Cauchy ou de Euler: São equações da
forma
𝑥2𝑦′′ + 𝑎𝑥𝑥′ + 𝑏𝑦 = 0 (a, b constantes)
✓ Portanto, de coeficientes não constantes, mas que
podem ser resolvidas por manipulação algébrica.
• Substituindo-se
𝑦 = 𝑥𝜆
• e suas derivadas na EDO, tem-se
𝑥2𝜆 𝜆 − 1 𝑥𝜆−2 + 𝑎𝑥𝜆𝑥𝜆−1 + 𝑏𝑥𝜆 = 0
-
6/6/2019
35
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Dividindo-se toda a expressão por 𝑥𝜆 (não nula para𝑥 ≠ 0) se
obtém a equação característica
𝜆2 + 𝑎 − 1 𝜆 + 𝑏 = 0
• Se as raízes 𝜆1 e 𝜆2 são diferentes de zero, entãoas
funções
𝑦1 𝑥 = 𝑥𝜆1 e 𝑦2 𝑥 = 𝑥
𝜆2
• constituem um sistema fundamental de soluções da
EDO para qualquer valor de x nos quais tais funções
são reais e finitas, e a solução geral correspondente é
𝑦 𝑥 = 𝑐1𝑥𝜆1 + 𝑐2𝑥
𝜆2 (𝑐1 e 𝑐2 arbitrários)
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 01: Resolver a equação de Cauchy
𝑥2𝑦′′ −3
2𝑥′ −
3
2𝑦 = 0
• A equação característica ou auxiliar é
𝜆2 + −3
2− 1 𝜆 −
3
2= 𝜆2 −
5
2𝜆 −
3
2= 0
cujas raízes são 𝜆1 = − Τ1 2 e 𝜆2 = 3, formando,assim, o sistema
fundamental de solução paraqualquer x > 0
𝑦1 𝑥 = 𝑥− Τ1 2 e 𝑦2 𝑥 = 𝑥
3 ,
com solução geral 𝒚 𝒙 =𝒄𝟏
𝒙+ 𝒄𝟐𝒙
𝟑
-
6/6/2019
36
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 02: Resolver a equação de Cauchy
𝑥2𝑦′′ − 3𝑥′ + 4𝑦 = 0
• A equação característica ou auxiliar é
𝜆2 + −3 − 1 𝜆 + 4 = 𝜆2 − 4𝜆 + 4 = 0
com raiz dupla 𝜆1 = 𝜆2 = 2 = 𝜆, obtendo-se umaúnica solução.
Neste caso crítico, pode-se obter uma segundasolução por meio do
método da variação dosparâmetros, como visto anteriormente, o
qualfornece
𝑦2 𝑥 = 𝑢𝑦1 𝑥 = (ln𝑥) 𝑦1(𝑥)
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Então, as duas soluções são
• 𝑦1 𝑥 = 𝑥𝜆 e 𝑦2 𝑥 = 𝑥
𝜆 ln 𝑥,
• que são linearmente independentes e, portanto,
constituem um sistema fundamental de soluções
reais para todo x positivo, e a solução geral
correspondente é
• 𝑦 𝑥 = 𝑐1 + 𝑐2 ln 𝑥 𝑥𝜆 𝜆 =
1−𝑎
2
• No exemplo formulado, a solução geral do problema
é
• 𝒚 𝒙 = (𝒄𝟏 + 𝒄𝟐 𝐥𝐧 𝒙)𝒙𝟐
-
6/6/2019
37
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 03: Resolver a equação de Cauchy
𝑥2𝑦′′ + 𝑥′ + 4𝑦 = 0
• A equação característica ou auxiliar é
𝜆2 + 1 − 1 𝜆 + 4 = 𝜆2 − 4 = 0
com raízes complexas conjugadas
𝜆1 = 𝑝 + 𝑞𝑖 = 0 + 2𝑖 e 𝜆2 = 𝑝 − 𝑞𝑖 = 0 − 2𝑖.
Neste caso, as soluções da equação seriam asfunções
complexas
𝑦1 𝑥 = 𝑥𝑝+𝑞𝑖 e 𝑦2 𝑥 = 𝑥
𝑝−𝑞𝑖
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Mas isto nem sempre é adequado, pois
normalmente se busca funções reais válidas para x
> 0.
• Dessa forma, trabalha-se com as partes real e
imaginária do número complexo (p + qi) para se
obter a solução da EDOLH de Cauchy.
𝑦1 = 𝑥𝑝+𝑞𝑖 = 𝑥𝑝𝑥𝑞𝑖 = 𝑥𝑝𝑒ln(𝑥
𝑞𝑖)) = 𝑥𝑝𝑒ln 𝑥𝑞 𝑖
𝑦2 = 𝑥𝑝−𝑞𝑖 = 𝑥𝑝𝑥−𝑞𝑖 = 𝑥𝑝𝑒ln(𝑥
−𝑞𝑖)) = 𝑥𝑝𝑒−ln 𝑥𝑞 𝑖
✓ Fórmulas de Euler ቊ𝑒𝑖𝜃 = cos 𝜃 + 𝑖𝑠𝑒𝑛 𝜃𝑒−𝑖𝜃 = cos𝜃 − 𝑖𝑠𝑒𝑛
-
6/6/2019
38
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Fazendo 𝜃 = ln 𝑥𝑞
✓ ቊ𝑦1 = 𝑥
𝑝[𝑐𝑜𝑠(ln 𝑥𝑞) + 𝑖𝑠𝑒𝑛(ln 𝑥𝑞)]
𝑦2 = 𝑥𝑝[𝑐𝑜𝑠(ln 𝑥𝑞) − 𝑖𝑠𝑒𝑛(ln 𝑥𝑞)]
✓ Como 𝑦1 e 𝑦2 são soluções da equação, então
✓ 𝑦1 + 𝑦2 = 𝑥𝑝[2cos(ln 𝑥𝑞)] ∴
✓1
2(𝑦1 + 𝑦2) = 𝑥
𝑝[cos(ln 𝑥𝑝)]
✓ 𝑦1 − 𝑦2 = 𝑥𝑝[2𝑖𝑠𝑒𝑛(ln 𝑥𝑞)] ∴
✓1
2𝑖(𝑦1 − 𝑦2) = 𝑥
𝑝[𝑠𝑒𝑛 ln(𝑥𝑞)]
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ também são soluções, com os segundos membros
reais; ademais, como o seu quociente não é
constante, elas são linearmente independentes em
qualquer intervalo, constituindo-se, portanto, em um
sistema fundamental de soluções em todo o eixo dos
x. Dessa forma, a solução geral correspondente é
✓ 𝑦 𝑥 = 𝑥𝑝 𝐴𝑐𝑜𝑠(ln 𝑥𝑞) + 𝐵𝑠𝑒𝑛(ln 𝑥𝑞) ,
✓ onde A e B são constantes arbitrárias.
✓ No presente exemplo (p = 0 e q = 2) a solução geral
do problema é
✓ 𝒚 𝒙 = 𝑨𝒄𝒐𝒔(𝐥𝐧 𝒙𝟐) + 𝑩𝒔𝒆𝒏(𝐥𝐧 𝒙𝟐)
-
6/6/2019
39
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Problema de valor inicial. Para uma ED de n-ésima
ordem, o problema descrito pela referida equação
𝑎𝑛 𝑥 𝑦(𝑛) + 𝑎𝑛−1 𝑥 𝑦
(𝑛−1) +⋯+ 𝑎1 𝑥 𝑦′ +
+ 𝑎𝑜 𝑥 𝑦 = 𝑟(𝑥)
sujeita às condições
𝑦 𝑥𝑜 = 𝑦𝑜, 𝑦′ 𝑥𝑜 = 𝑦𝑜′,..., 𝑦(𝑛−1) 𝑥𝑜 = 𝑦𝑜
(𝑛−1)
em que 𝑦𝑜, 𝑦𝑜′,..., 𝑦𝑜
(𝑛−1)são constantes, é chamado
de um problema de valor inicial (PVI), e as condições
acima especificadas de condições iniciais, do qual
resulta uma solução em algum intervalo I contendo xo.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• No caso de ED linear de segunda ordem, uma
solução para o problema de valor inicial é uma
função que satisfaz a equação no intervalo I e cujo
gráfico passa pelo ponto 𝑥𝑜 , 𝑦𝑜 com inclinaçãoigual a 𝑦𝑜
′ (exemplo 01), conforme condiciona o
teorema a seguir.
• Teorema. Existência de uma única solução. Sejam
𝑎𝑛 𝑥 , 𝑎𝑛−1 𝑥 , ..., 𝑎1 𝑥 , 𝑎𝑜 𝑥 e 𝑟 𝑥 contínuasem um intervalo
I com 𝑎𝑛 𝑥 ≠ 0 para todo x nesteintervalo. Se x = xo é algum ponto
deste intervalo,
então existe uma única solução y 𝑥 para oproblema de valor
inicial neste intervalo.
-
6/6/2019
40
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo 01: Resolver o problema de valor inicial
✓ 𝑦′′ + 16𝑦 = 0, 𝑦 0 = 0, 𝑦′ 0 = 1
✓ 𝑦 = 𝑐1 cos 4𝑥 + 𝑐2𝑠𝑒𝑛 4𝑥,
✓ 𝑦 0 = 0 → 𝑐1 = 0
✓ 𝑦′ = −4𝑐1 sen 4𝑥 + 4𝑐2𝑐𝑜𝑠𝑥 4𝑥,
✓ 𝑦′ 0 = 1 → 𝑐2 =1
4
✓ 𝒚(𝒙) =𝒔𝒆𝒏 𝟒𝒙
𝟒
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
0
m=y'o=1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
-60 -30 0 30 60 90 120
-
6/6/2019
41
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Problema de valor de contorno. Consiste em
resolver uma ED de ordem dois ou maior na qual a
variável dependente y e suas derivadas são
especificadas em pontos diferentes.
Neste tipo de problema, mesmo quando as condições
do teorema apresentado são satisfeitas, a ED pode
ter:
i. várias soluções,
ii. uma única solução, ou
iii. nenhuma solução.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplos:
• Caso (i): Resolver o problema de valor de contorno
✓ 𝑦′′ + 16𝑦 = 0, 𝑦 0 = 0, 𝑦 Τ𝜋 2 = 0
✓ 𝑦 = 𝑐1 cos 4𝑥 + 𝑐2𝑠𝑒𝑛 4𝑥,
✓ 𝑦 0 = 0 → 𝑐1 = 0
✓ 𝑦 Τ𝜋 2 = 0 → 𝑐2𝑠𝑒𝑛 2𝜋 = 0 ∴ 𝒄𝟐 ∙ 𝟎 = 𝟎
✓ 𝒚 𝒙 = 𝒄𝟐𝒔𝒆𝒏 𝟒𝝅 = 𝒄 ∙ 𝒔𝒆𝒏 𝟒𝝅
✓ Há uma infinidade de funções satisfazendo a ED,
cujos gráficos passam pelos pontos (0, 0) e ( Τ𝜋 2, 0).
-
6/6/2019
42
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Caso (ii): Resolver o problema de valor de
contorno
✓ 𝑦′′ + 16𝑦 = 0, 𝑦 0 = 0, 𝑦 Τ𝜋 8 = 0
✓ 𝑦 = 𝑐1 cos 4𝑥 + 𝑐2𝑠𝑒𝑛 4𝑥,
✓ 𝑦 0 = 0 → 𝒄𝟏 = 𝟎
✓ 𝑦 Τ𝜋 8 = 0 → 𝒄𝟐 = 𝟎
✓ 𝒚 𝒙 = 𝟎
✓ Portanto, para as condições de contorno impostas
esta seria uma solução, que é única.
-
6/6/2019
43
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Caso (iii): Resolver o problema de valor de
contorno
✓ 𝑦′′ + 16𝑦 = 0, 𝑦 0 = 0, 𝑦 Τ𝜋 2 = 1
✓ 𝑦 = 𝑐1 cos 4𝑥 + 𝑐2𝑠𝑒𝑛 4𝑥,
✓ 𝑦 0 = 0 → 𝑐1 = 0
✓ 𝑦 Τ𝜋 2 = 1 → 𝟏 = 𝒄𝟐 ∙ 𝟎
✓ Portanto, obtém-se uma contradição, isto é,
qualquer que seja o valor de c2 a relação nunca
será obedecida, o que significa que o problema
para tais condições não apresenta solução.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
✓ Dependência e independência linear - Wronskiano
• Trata-se de um critério mais geral para verificar a
dependência ou independência linear das soluções
da equação diferencial.
• O teorema a seguir proporciona condição
suficiente para a independência linear de n
funções em um intervalo, supondo que cada uma
dessas funções seja diferenciável pelo menos n – 1
vezes.
-
6/6/2019
44
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Teorema. Critério para independência linear de
funções. Supondo-se que f1(x), f2(x),..., fn(x) sejam
diferenciáveis pelo menos n–1 vezes, nesse caso,
se o determinante
𝑓1 𝑓2 ⋯ 𝑓𝑛𝑓1′
⋮
𝑓1(𝑛−1)
𝑓2′ ⋯ 𝑓2
′
⋮ ⋮
𝑓2(𝑛−1)
⋯ 𝑓𝑛(𝑛−1)
• for diferente de zero em pelo menos um ponto do
intervalo I, então as funções f1(x), f2(x),...,fn(x)
serão linearmente independentes no intervalo.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• O referido determinante é denotado por
W(f1(x), f2(x),..., fn(x))
e é chamado de Wronskiano das funções.
• Demonstração: No caso de ED de segunda ordem
(n = 2), sejam y1(x) e y2(x) soluções linearmente
dependentes da função
𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 = 0
no intervalo I. Então, existem constantes c1 e c2,
não ambas nulas, tais que 𝑐1𝑦1 + 𝑐2𝑦2 = 0 paratodo x em I.
-
6/6/2019
45
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Derivando-se essa combinação, tem-se
𝑐1𝑦1′ + 𝑐2𝑦2
′ = 0
• Obtém-se, então, um sistema de equações lineares
ቊ𝑐1𝑦1 + 𝑐2𝑦2 = 0
𝑐1𝑦1′+𝑐2𝑦2
′ = 0
• que possuem 𝑐1 e 𝑐2 como incógnitas.
• Como o sistema é homogêneo e o seu
determinante é exatamente o Wronskiano
𝑊[𝑦1(𝑥), 𝑦2(𝑥)], que é igual a zero,
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
𝑊 𝑦1, 𝑦2 =𝑦1(𝑥) 𝑦2(𝑥)
𝑦1′(𝑥) 𝑦2
′(𝑥)= 𝑦1𝑦2
′ − 𝑦2𝑦1′ = 0
• o sistema possui uma solução não trivial (𝑐1 e 𝑐2 nãosão
simultaneamente iguais a zero) para cada x no
intervalo.
• Conclui-se, portanto, que 𝑦1 e 𝑦2 são
linearmentedependentes.
• Corolário. Se f1(x), f2(x),..., fn(x) possuem pelo menosn–1
derivadas e são linearmente dependentes, então
𝑊 𝑓1 𝑥 , 𝑓2 𝑥 ,⋯ , 𝑓𝑛 𝑥 = 0
para todo x no intervalo.
-
6/6/2019
46
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Exemplo: A EDO de segunda ordem 𝑦′′ − 9𝑦 = 0• possui duas
soluções 𝑦1 = 𝑒
3𝑥 e 𝑦2 = 𝑒−3𝑥 .
Verificar se estas funções são linearmente
independentes.
𝑊 𝑦1, 𝑦2 =𝑦1(𝑥) 𝑦2(𝑥)
𝑦1′(𝑥) 𝑦2
′(𝑥)∴
𝑊 𝑒3𝑥, 𝑒−3𝑥 = 𝑒3𝑥 𝑒−3𝑥
3𝑒3𝑥 −3𝑒3𝑥∴
𝑊 𝑒3𝑥, 𝑒−3𝑥 = 𝑒3𝑥 −3𝑒−3𝑥 − 𝑒−3𝑥 3𝑒3𝑥 ∴
𝑊 𝑒3𝑥, 𝑒−3𝑥 = −6
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.3 EDOH - Coeficientes Constantes
• Logo, as soluções da EDO apresentadas são
linearmente independentes. Assim, para todo
valor de x, elas formam um conjunto fundamental
de soluções em todo intervalo (−∞,∞) e asolução geral para a
equação diferencial nointervalo é
𝑦 𝑥 = 𝑐1𝑒3𝑥 + 𝑐2𝑒
−3𝑥
-
6/6/2019
47
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
II – EDOs de Segunda Ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Teorema. Sejam 𝑦1 , 𝑦2 ,..., 𝑦𝑛 soluções para aEDOLH de
n-ésima ordem
𝑎𝑛 𝑥 𝑦(𝑛) + 𝑎𝑛−1 𝑥 𝑦
(𝑛−1) +⋯+ 𝑎1 𝑥 𝑦′ + 𝑎𝑜 𝑥 𝑦 = 0
✓ em um intervalo I e seja 𝑦𝑝 qualquer solução para a
equação não homogênea
✓ 𝑎𝑛 𝑥 𝑦(𝑛) + 𝑎𝑛−1 𝑥 𝑦
(𝑛−1) +⋯+ 𝑎1 𝑥 𝑦′ + 𝑎𝑜 𝑥 𝑦 = 𝑟(𝑥)
✓ no mesmo intervalo. Então
𝑦 𝑥 = 𝑐1𝑦1 𝑥 + 𝑐2𝑦2 𝑥 +⋯+ 𝑐𝑛𝑦𝑛 + 𝑦𝑝(𝑥)
é também uma solução para a equação não homogênea
no intervalo para quaisquer constantes 𝑐1, 𝑐2, … , 𝑐𝑛.
-
6/6/2019
48
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Teorema. Seja 𝑦𝑝 uma dada solução para a EDOL não
homogênea de n-ésima ordem
𝑎𝑛 𝑥 𝑦(𝑛) + 𝑎𝑛−1 𝑥 𝑦
(𝑛−1) +⋯+ 𝑎1 𝑥 𝑦′ + 𝑎𝑜 𝑥 𝑦 = 𝑟(𝑥)
✓ em um intervalo I e sejam {𝑦1, 𝑦2, ..., 𝑦𝑛} um
conjuntofundamental de soluções para a equação homogênea
associada
✓ 𝑎𝑛 𝑥 𝑦(𝑛) + 𝑎𝑛−1 𝑥 𝑦
(𝑛−1) +⋯+ 𝑎1 𝑥 𝑦′ + 𝑎𝑜 𝑥 𝑦 = 0
✓ no mesmo intervalo. Então, para qualquer solução 𝑌(𝑥)da não
homogênea em I, pode-se encontrar constantes
𝐶1, 𝐶2, … , 𝐶𝑛 tais que
𝑌 𝑥 = 𝐶1𝑦1 𝑥 + 𝐶2𝑦2 𝑥 +⋯+ 𝐶𝑛𝑦𝑛 + 𝑦𝑝(𝑥)
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Demonstração. Para o caso de n = 2, supõe-se que
𝑌 e 𝑦𝑝 sejam soluções para a EDO não homogênea
𝑎2 𝑥 𝑦′′ + 𝑎1 𝑥 𝑦
′ + 𝑎𝑜 𝑥 𝑦 = 𝑟(𝑥).
✓ Se for definida uma função u por u 𝑥 = 𝑌 𝑥 −𝑦𝑝(𝑥), então
✓ 𝑎2 𝑥 𝑢′′ + 𝑎1 𝑥 𝑢
′ + 𝑎𝑜 𝑥 𝑢 =
✓ = 𝑎2 𝑥 𝑌′′ − 𝑦𝑝
′′ + 𝑎1 𝑥 𝑌′ − 𝑦𝑝
′ + 𝑎𝑜 𝑥 𝑌 − 𝑦𝑝 =
✓ = 𝑎2 𝑥 𝑌′′ + 𝑎1 𝑥 𝑌
′ + 𝑎𝑜 𝑥 𝑌 −
✓ −[𝑎2 𝑥 𝑦𝑝′′ + 𝑎1 𝑥 𝑦𝑝
′ + 𝑎𝑜 𝑥 𝑦𝑝 =
✓ = 𝑟 𝑥 − 𝑟 𝑥 = 0.
-
6/6/2019
49
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Portanto, pode-se escrever
𝑢 𝑥 = 𝐶1𝑦1 𝑥 + 𝐶2𝑦2 𝑥
𝑌 𝑥 − 𝑦𝑝 𝑥 = 𝐶1𝑦1 𝑥 + 𝐶2𝑦2 𝑥
𝑌 𝑥 = 𝐶1𝑦1 𝑥 + 𝐶2𝑦2 𝑥 + 𝑦𝑝 𝑥 ,
que é a solução geral para a EDO não homogênea de
segunda ordem. Generalizando para as EDOs de ordem
maior, a solução geral é
𝑌 𝑥 = 𝐶1𝑦1 𝑥 + 𝐶2𝑦2 𝑥 + ⋯+ 𝐶𝑛𝑦𝑛 𝑥 + 𝑦𝑝 𝑥
𝑌(𝑥) = 𝑦ℎ 𝑥 + 𝑦𝑝 𝑥 ,
onde 𝑦ℎ 𝑥 é a solução da homogênea associada.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Método dos coeficientes a determinar:
• Para se obter a solução geral de uma EDOL não
homogênea é necessário encontrar a solução geral
da ED homogênea associada 𝑦ℎ 𝑥 e qualquersolução particular 𝑦𝑝 𝑥
da ED não homogênea.
• Uma das técnicas utilizadas para a obtenção de
𝑦𝑝 𝑥 para equações diferenciais de qualquer
ordem é o método dos coeficientes a determinar;
entretanto, esta técnica, não obstante a sua
simplicidade e economia, apresenta algumas
limitações, a saber:
-
6/6/2019
50
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
- somente aplicado para equações que tem
coeficientes constantes, e
- nos casos em que r(x) é uma constante ou funções
polinomial, exponencial, seno, cosseno, ou soma
e/ou produtos de tais funções.
• Como as derivadas das somas e produtos das funções
citadas são ainda somas e produtos de constantes,
polinômios, exponenciais, senos e cossenos, e a
combinação linear das derivadas (𝑎𝑦𝑝′′ + 𝑏𝑦𝑝
′ +
𝑐𝑦𝑝) tem de ser identicamente igual a r(x), parecerazoável supor
que 𝑦𝑝 𝑥 é da mesma forma de r(x).
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Exemplos 01: Resolver a equação
𝑦′′ + 4𝑦′ + 2𝑦 = 2𝑥2 − 3𝑥 + 6
Solução:
Passo 1 - Resolve-se a ED homogênea associada,
obtendo-se a solução geral
𝑦ℎ = 𝑐1𝑒− 2+ 6 𝑥 + 𝑐2𝑒
−2+ 6 𝑥
Passo 2 - Como r(x) é um polinômio quadrático,
supõe-se uma solução particular com a mesma
forma, ou seja,
𝑦𝑝 = 𝐴𝑥2 + 𝐵𝑥 + 𝐶
-
6/6/2019
51
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
cujos coeficiente A, B e C devem ser
determinados pela substituição de 𝑦𝑝 e suas
derivadas
𝑦𝑝′ = 2𝐴𝑥 + 𝐵 e 𝑦𝑝
′′ = 2𝐴
na equação não homogênea fornecida, obtendo-se
𝑦𝑝′′ + 4𝑦𝑝
′ − 2𝑦𝑝 =
= 2𝐴 + 8𝐴𝑥 + 4𝐵 − 2𝐴𝑥2 − 2𝐵𝑥 − 2𝐶
= −2𝐴𝑥2 + 8𝐴 − 2𝐵 𝑥 + (2𝐴 + 4𝐵 − 2𝐶)
= 2𝑥2 − 3𝑥 + 6
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Comparando-se os membros da expressão, forma-se
o sistema
ቐ−2𝐴 = 28𝐴 − 2𝐵 = −32𝐴 + 4𝐵 − 2𝐶 = 6
de onde se obtém os valores 𝐴 = −1, 𝐵 = − Τ5 2 e
𝐶 = −9. Logo,
𝑦𝑝 = −𝑥2 −
5
2𝑥 − 9
Passo 3 - A solução geral para a equação dada é
𝑦 𝑥 = 𝑦ℎ + 𝑦𝑝
= 𝑐1𝑒− 2+ 6 𝑥 + 𝑐2𝑒
−2+ 6 𝑥 − 𝑥2 −5
2𝑥 − 9
-
6/6/2019
52
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Exemplos 02: Resolver a equação
𝑦′′ − 2𝑦′ − 3𝑦 = 4𝑥 − 5 + 6𝑥𝑒2𝑥
Solução:
Passo 1 - Resolve-se a ED homogênea associada,
obtendo-se a solução geral
𝑦ℎ = 𝑐1𝑒−𝑥 + 𝑐2𝑒
3𝑥
Passo 2 - Como r(x) envolve a soma e produtos de
funções polinomiais e exponenciais, e como a
derivada do produto 𝑥𝑒2𝑥 = 2𝑥𝑒2𝑥 + 𝑒2𝑥, sugere-seuma solução
particular da forma,
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
𝑦𝑝 = 𝑦𝑝1 + 𝑦𝑝2 = 𝐴𝑥 + 𝐵 + (𝐶𝑥𝑒2𝑥 + 𝐷𝑒2𝑥)
que devidamente substituída, junto com as suas
derivadas, na equação dada, e agrupando os termos,
tem-se
𝑦′′ − 2𝑦′ − 3𝑦 =
= (2𝐶𝑒2𝑥 + 2𝐶𝑒2𝑥 + 4𝐶𝑥𝑒2𝑥 + 4𝐷𝑒2𝑥 −
−2 𝐴 + 𝐶𝑒2𝑥 + 2𝐶𝑥𝑒2𝑥 + 2𝐷𝑒2𝑥 −
−3 𝐴𝑥 + 𝐵 + 𝐶𝑥𝑒2𝑥 + 𝐷𝑒2𝑥 =
= −3𝐴𝑥 − 2𝐴 + 3𝐵 + 4𝐶 − 4𝐶 − 3𝐶 𝑥𝑒2𝑥 +
+ 2𝐶 + 2𝐶 + 4𝐷 − 2𝐶 − 4𝐷 − 3𝐷 𝑒2𝑥 =
-
6/6/2019
53
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
= −3𝐴𝑥 − 2𝐴 + 3𝐵 − 3𝐶𝑥𝑒2𝑥 + 2𝐶 − 3𝐷 𝑒2𝑥=
= 4𝑥 − 5 + 6𝑥𝑒2𝑥
Desta identidade , obtém-se o sistema
−3𝐴 = 42𝐴 + 3𝐵 = 5
−3𝐶 = 62𝐶 − 3𝐷 = 0
cuja resolução resulta em
𝐴 = − Τ4 3 , 𝐵 = Τ23 9 , 𝐶 = −2 e D = − Τ4 3.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Consequentemente,
𝑦𝑝 = −4
3𝑥 +
23
9− 2𝑥𝑒2𝑥 −
4
3𝑒2𝑥
Passo 3 – A solução geral da a EDOL não
homogênea fornecida é
𝑦 𝑥 = 𝑦ℎ + 𝑦𝑝 =
= 𝑐1𝑒−𝑥 + 𝑐2𝑒
3𝑥 + −4
3𝑥 +
23
9− 2𝑥𝑒2𝑥 −
4
3𝑒2𝑥
-
6/6/2019
54
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Método geral:
• Considerando a equação da forma
𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 = 𝑟(𝑥),
• supondo que f, g e r são funções contínuas sobre um
intervalo I, pode-se obter uma solução particular da
equação empregando-se o método da variação dos
parâmetros como segue.
• O método consiste em substituir c1 e c2 por funções
u(x) e v(x) na solução geral da equação homogênea
associada da equação dada, tais que a função
resultante
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
𝑦𝑝 𝑥 = 𝑐1𝑦1 𝑥 + 𝑐2𝑦2 𝑥
= 𝑢 𝑥 𝑦1 𝑥 + 𝑣(𝑥) 𝑦2 𝑥
• seja uma solução particular da equação sobre o
intervalo I, cuja derivada é
𝑦𝑝′ = 𝑢′𝑦1 + 𝑢𝑦1
′ + 𝑣′𝑦2 + 𝑣𝑦2′ .
• Como se deseja determinar duas funções
desconhecidas (u e v), pode-se imaginar que serão
necessárias duas equações para tal, uma delas resulta
na substituição 𝑦𝑝 = 𝑢𝑦1 + 𝑣𝑦2 na ED dada, e a
outra imposta é
𝑢′𝑦1 + 𝑣′𝑦2 = 0
-
6/6/2019
55
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Isto reduz a expressão de 𝑦𝑝′ à forma
𝑦𝑝′ = 𝑢𝑦1
′ + 𝑣𝑦2′
• Derivando-se esta função, obtém-se
𝑦𝑝′′ = 𝑢′𝑦1
′ + 𝑢𝑦1′′ + 𝑣′𝑦2
′ + 𝑣𝑦2′′
• Substituindo-se a função 𝑦𝑝 e suas derivadas na
ED e agrupando-se, respectivamente, os termosque contem u e v,
tem-se
𝑢 𝑦1′′ + 𝑓𝑦1
′ + 𝑔𝑦1 + 𝑣 𝑦2′′ + 𝑓𝑦2
′ + 𝑔𝑦2 ++𝑢′𝑦1
′ + 𝑣′𝑦2′ = 𝑟
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Como 𝑦1e 𝑦2 são soluções da equação homogênea,a expressão se
reduz a
𝑢′𝑦1′ + 𝑣′𝑦2
′ = 𝑟,
• que junto com a equação
• 𝑢′𝑦1 + 𝑣′𝑦2 = 0
• forma um sistema de equações lineares cujas
incógnitas são u’ e v’, e cuja a solução geral,
obtida pela regra de Cramer, conforme
desenvolvida a seguir, é
-
6/6/2019
56
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Como 𝑦1e 𝑦2 são soluções da equação homogênea,a expressão se
reduz a
ቊ𝑢′𝑦1 + 𝑣
′𝑦2 = 0
𝑢′𝑦1′ + 𝑣′𝑦2
′ = 𝑟
𝑊 =𝑦1 𝑦2𝑦1′ 𝑦2
′ = 𝑦1𝑦2′ − 𝑦2𝑦1
′
𝑊𝑢=0 𝑦2𝑟 𝑦2
′ = − 𝑦2r , 𝑊𝑣 =𝑦1 0
𝑦1′ 𝑟
= 𝑦1𝑟
𝑢′ =𝑊𝑢
𝑊= −
𝑦2𝑟
𝑊, 𝑣′ =
𝑊𝑣
𝑊=
𝑦1𝑟
𝑊
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Pela independência linear de 𝑦1 e 𝑦2 no intervalo I,sabe-se
que 𝑊 ≠ 0, para todo x no intervalo.
• Integrando-se as expressões, obtém-se
𝑢 = −𝑦2𝑟
𝑊𝑑𝑥, 𝑣 =
𝑦1𝑟
𝑊𝑑𝑥
• Como r(x) é contínua, estas integrais existem,
esubstituindo-se as pressões de u e v em yp,obtém-se a solução
desejada, como
𝑦𝑝 𝑥 = 𝑢𝑦1 + 𝑣 𝑦2 =
= −𝑦1 𝑦2𝑟
𝑊𝑑𝑥 + 𝑦2
𝑦1𝑟
𝑊𝑑𝑥
-
6/6/2019
57
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Não obstante o método da variação dos parâmetros
ter sido explicado utilizando-se uma EDOL não
homogênea de segunda ordem, ele pode ser
generalizado para equações não homogêneas de
ordem superior.
• Exemplo 01: Resolver a equação
𝑦′′ − 4𝑦′ + 4𝑦 = (𝑥 + 1)𝑒2𝑥
Equação auxiliar:
𝜆2 − 4𝜆 + 4 = 0, 𝜆1 = 𝜆2 = 2Solução da homogênea:
𝑦1 = 𝑒2𝑥, 𝑦2 = 𝑥𝑒
2𝑥 → 𝑦ℎ = 𝑐1𝑒2𝑥 + 𝑐2𝑥𝑒
2𝑥
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
•Wronskiano (W):
𝑊 𝑒2𝑥, 𝑥𝑒2𝑥 =𝑒2𝑥 𝑥𝑒2𝑥
2𝑒2𝑥 (2𝑥 + 1)𝑒2𝑥= 𝑒4𝑥
𝑊1 =0 𝑥𝑒2𝑥
(𝑥 + 1)𝑒2𝑥 2𝑥 + 1 𝑒2𝑥= − 𝑥 + 1 𝑥𝑒4𝑥
𝑊2 =𝑒2𝑥 0
2𝑒2𝑥 𝑥 + 1 𝑒2𝑥= 𝑥 + 1 𝑒4𝑥
Então
𝑢′ =𝑊1
𝑊= −𝑥2 − 𝑥 e 𝑣′ =
𝑊2
𝑊= 𝑥 + 1
-
6/6/2019
58
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
e
𝑢 = 𝑥2−) − 𝑥)𝑑𝑥 = −𝑥3
3−
𝑥2
2
𝑣 = 𝑥) + 1)𝑑𝑥 =𝑥2
2− 𝑥
Portanto,
𝑦𝑝 = −𝑥3
3−𝑥2
2𝑒2𝑥 +
𝑥2
2− 𝑥 𝑥𝑒2𝑥 =
=𝑥3
6+
𝑥2
2𝑒2𝑥
𝑦 = 𝑦ℎ + 𝑦𝑝 = 𝑐1𝑒2𝑥 + 𝑐2𝑥𝑒
2𝑥 +𝑥3
6+𝑥2
2𝑒2𝑥
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Exemplo 02: Resolver a equação
𝑦′′ + 𝑦 = sec 𝑥
Equação auxiliar:
𝜆2 − 1 = 0, 𝜆1 = 𝑖, 𝜆2 = −𝑖 ቊ𝑝 = 0𝑞 = 1
Solução da homogênea:
𝑦1 = cos𝑥, 𝑦2 = 𝑠𝑒𝑛 𝑥 → 𝑦ℎ = 𝑐1 cos 𝑥 + 𝑐2𝑠𝑒𝑛 𝑥
• Wronskiano (W):
𝑊 cos 𝑥 , 𝑠𝑒𝑛 𝑥 =cos 𝑥 𝑠𝑒𝑛 𝑥
−𝑠𝑒𝑛 𝑥 cos 𝑥= 1
-
6/6/2019
59
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
𝑊1 =0 𝑠𝑒𝑛 𝑥
sec 𝑥 cos 𝑥= −sec 𝑥 ∙ 𝑠𝑒𝑛𝑥 = −tan 𝑥
𝑊2 =cos 𝑥 0−𝑠𝑒𝑛 𝑥 sec 𝑥
= 1
•sec 𝑥 = Τ1 cos 𝑥
Então
𝑢′ =𝑊1
𝑊= − tan 𝑥 e 𝑣′ =
𝑊2
𝑊= 1
𝑢 = − tan 𝑥 𝑑𝑥 = −[− ln (cos 𝑥)] = ln(cos 𝑥)
𝑣 = 𝑑𝑥 = 𝑥
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Portanto,
𝑦𝑝 = 𝑢𝑦1 + 𝑣𝑦2 = ln (cos 𝑥) ∙ cos 𝑥 + 𝑥𝑠𝑒𝑛 𝑥
e
𝑦 = 𝑦ℎ + 𝑦𝑝 =
= 𝑐1 cos 𝑥 + 𝑐2𝑠𝑒𝑛𝑥 + ln cos x ∙ cos 𝑥 + 𝑥𝑠𝑒𝑛 𝑥
𝑦 = [𝑐1+ln(cos 𝑥)] cos 𝑥 + 𝑐2 + 𝑥 𝑠𝑒𝑛 𝑥
-
6/6/2019
60
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
✓ Aplicações - Movimento forçado.
• Considera-se uma força variável r(t) agindo sobre o
sistema massa-mola-amortecedor.
• A inclusão de r(t) na formulação da segunda lei de
Newton dá a equação diferenciável do movimento
forçado, ou seja
𝑚 ሷ𝑦 + 𝑐 ሶ𝑦 + 𝑘𝑦 = 𝑟(𝑡) ou ሷ𝑦 +𝑐
𝑚ሶ𝑦 +
𝑘
𝑚𝑦 =
𝑟(𝑡)
𝑚
• r(t) é chamada de entrada (input) ou força aplicada, e
a solução correspondente é chamada de saída (output)
ou resposta do sistema à força aplicada.
r(t)
y(t)
k
c
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• De particular interesse são as entradas (input)
periódicas.
• Para determinar e discutir uma solução geral, que
representa a saída geral do sistema, será adotada uma
entrada senoidal, tal como
𝑟 𝑡 = 𝐹𝑜 cos 𝛾𝑡 (𝐹𝑜 > 0, 𝛾 > 0)
• Logo, a equação diferencial a considerar é
𝑚 ሷ𝑦 + 𝑐 ሶ𝑦 + 𝑘𝑦 = 𝐹𝑜 cos 𝛾𝑡,
portanto, trata-se de uma EDOL não homogênea de
coeficientes constantes.
-
6/6/2019
61
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• A solução dessa EDO pode ser feita empregando o
método dos coeficientes a determinar, tomando-se
como solução particular
𝑦𝑝 𝑡 = 𝐴 cos 𝛾𝑡 + 𝐵 sin 𝛾𝑡
• Substituindo-se 𝑦𝑝 e suas derivadas na ED, obtém-se
os seguintes valores para as constante A e B
𝐴 = 𝐹𝑜𝑚(𝛾2−𝑤2)
𝑚2(𝛾2−𝑤2)2+𝑤2𝑐2, 𝐵 = 𝐹𝑜
𝑤𝑐
𝑚2(𝛾2−𝑤2)2+𝑤2𝑐2
• Lembrando que 𝑤2 = Τ𝑘 𝑚. Então, a solução geral é
𝑦 𝑡 = 𝑦ℎ 𝑡 + 𝑦𝑝(𝑡)
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Caso I. Oscilações forçadas sem amortecimento.
Sem amortecimento, 𝑐 = 0 , e supondo-se 𝑤 ≠ 𝛾 ,obtém-se
𝑦𝑝 𝑡 =𝐹𝑜
𝑚(𝑤2−𝛾2)cos 𝛾𝑡
e a solução geral é
𝑦 𝑡 = 𝑐1 cos 𝑤𝑡 + 𝑐2 sin 𝑤𝑡) +𝐹𝑜
𝑚(𝑤2−𝛾2)cos 𝛾𝑡
- A saída representa, então, a superposição de duas
oscilações harmônicas, cujas frequências são Τ𝑤 2𝜋(ciclos/s) do
sistema e Τ𝛾 2𝜋 da entrada.
-
6/6/2019
62
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
- RESSONÂNCIA. O máximo de amplitude de 𝑦𝑝(cos 𝛾𝑡 = 1) é
𝑦𝑝 =𝐹𝑜
𝑚(𝑤2−𝛾2)cos 𝛾𝑡
de onde se observa que quando γ → 𝑤, 𝑦𝑝 → ∞.
- Essa situação proporciona a ocorrência de um
fenômeno de excitação de grandes oscilações pelo
união das frequência do sistema e de entrada (𝛾 = 𝑤),conhecido
como ressonância, de importância
fundamental no estudo dos sistemas vibrantes.
- Nesse caso, a ED se transforma em
ሷ𝑦 + 𝑤2𝑦 = 𝐹𝑜 cos𝑤𝑡,
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
- De onde se conclui que uma solução particular dessa
ED possui a forma
𝑦𝑝 𝑡 = 𝑡(𝐴 cos𝑤𝑡 + 𝐵 sin𝑤𝑡)
- Substituindo-se esta expressão e sua segunda
derivada na ED, obtém-se que
𝐴 = 0 e 𝐵 = Τ𝐹𝑜 2𝑚𝑤.
- Logo,
𝑦𝑝 𝑡 =𝐹𝑜
2𝑚𝑤𝑡 sin𝑤𝑡.
-
6/6/2019
63
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Solução particular no caso da ressonância.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
- BATIMENTOS. Fenômeno que ocorre quando γ épróximo de 𝑤. Nesse
caso, considera-se a soluçãoparticular na forma
𝑦𝑝 𝑡 =𝐹𝑜
𝑚(𝑤2−𝛾2)(cos 𝛾𝑡 − cos𝑤𝑡) (𝛾 ≠ 𝑤)
correspondente às condições iniciais 𝑦 0 = 0 ey′(0) = 0, a qual
pode ser modificada para
𝑦𝑝 𝑡 =2𝐹𝑜
𝑚(𝑤2−𝛾2)sin
𝑤+𝛾
2𝑡 sin
𝑤−𝛾
2𝑡.
Como 𝑤 − 𝛾 é pequena (valores próximos), operíodo da última
função seno é grande, obtendo-se,
dessa forma, uma oscilação do tipo a seguir:
𝑐𝑜𝑠𝑣−𝑐𝑜𝑠𝑢=2𝑠𝑖𝑛𝑢+𝑣
2𝑠𝑖𝑛𝑢−𝑣
2
-
6/6/2019
64
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Solução particular no caso dos batimentos.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
• Caso II. Oscilações forçadas com amortecimento.
- Com amortecimento, 𝑐 > 0.
- No sistema amortecido livre, a solução geral 𝑦ℎ →0 quando 𝑡 →
∞, o que significa que a solução geralda ED representa a solução
transitória (transiente) e
tende para a solução do estado estacionário 𝑦𝑝.
𝒚 𝒕 = 𝒚𝒉 + 𝒚𝒑 = 𝒕𝒓𝒂𝒏𝒔𝒊𝒆𝒏𝒕𝒆 + 𝒆𝒔𝒕. 𝒆𝒔𝒕𝒂𝒄𝒊𝒐𝒏á𝒓𝒊𝒐
- Após um tempo suficientemente longo, a saída
correspondente a uma entrada puramente senoidal se
aproxima de uma oscilação harmônica, cuja frequência
é a da entrada.
-
6/6/2019
65
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
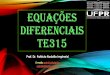
• Exemplo. Resolver o problema de valor inicial (PVI)
ሷ𝑦 + 2 ሶ𝑦 + 2𝑦 = 4 𝑐𝑜𝑠 𝑡 + 2 𝑠𝑖𝑛 𝑡 ,
𝑦 0 = 0, ሶ𝑦 0 = 3
- Solução: Para as condições iniciais dadas o
problema apresenta a solução
𝑦 𝑡 = 𝑦ℎ + 𝑦𝑝 = 𝑒−𝑡 sin 𝑡 + 2 sin 𝑡,
ቊTermo transiente: 𝑒−𝑡 sin 𝑡
Termo estacionário: 2 sin 𝑡
A figura mostra o efeito do termo transitório na
solução, que neste caso é insignificante após t > 𝜋.
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
2.4 Equações Não Homogêneas
Curva da solução da EDO (oscilação forçada com
amortecimento).
-
6/6/2019
66
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
❑ Introdução
❑ Equações Lineares Homogêneas
❑ EDOLH com Coeficientes Constantes
❑ EDOL Não Homogêneas
❑ EDOLH – Redução de Ordem
II – EDOs de Segunda Ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Método de d’Alembert:
• Introduzido pelo matemático francês Jean le Rond
d'Alembert, permite transformar uma equação
diferencial linear de ordem n em outra equação
linear de ordem n – 1, a partir de uma solução
particular conhecida.
• É um método de redução de ordem, ou seja,
conhecendo-se uma solução não trivial de uma
EDOLH de segunda ordem, sua resolução se reduz
a resolver uma EDO de primeira ordem, permitindo
calcular a solução geral a partir de uma solução
particular.
2.5 EDOLH – Redução de ordem
-
6/6/2019
67
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
• Seja 𝑦1 uma solução conhecida para a equaçãodiferencial linear
homogênea de segunda ordem
𝑦′′ + 𝑓 𝑥 𝑦′ + 𝑔 𝑥 𝑦 = 0
• Busca-se uma solução 𝑦2 = 𝑣(𝑥)𝑦1 que satisfaça𝐿(𝑦1+ 𝑦2) =
0.
• Calcula-se, então, as derivadas 𝑦2′ e 𝑦2
′′ ,
substituindo-as, juntamente com 𝑦2, na equação, deonde se
obtém
[𝑦1′′+𝑓 𝑥 𝑦1
′ + 𝑔 𝑥 𝑦1]𝑣 +
+𝑦1𝑣′′ + 2 𝑦1
′ + 𝑓 𝑥 𝑦1 𝑣′ = 0
2.5 EDOLH – Redução de ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
• Reorganizando os termos e lembrando que
𝑦1′′ + 𝑓 𝑥 𝑦1
′ + 𝑔 𝑥 𝑦1 = 0,
• pois 𝑦1 é solução da equação diferencial ordináriahomogênea,
tem-se que v satisfaz uma equação
ordinária de segunda ordem redutível à primeira,
do tipo:
𝑦1𝑣′′ + 2𝑦1
′ + 𝑓 𝑥 𝑦1 𝑣′ = 0
• A primitiva de v’ dá a função v, que multiplicada
por 𝑦1, conduz à segunda solução da equação, 𝑦2,e a solução
geral será da forma
𝑦 = 𝑐1𝑦1 + 𝑐2𝑦2
2.5 EDOLH – Redução de ordem
-
6/6/2019
68
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Exemplo 01: Sabendo-se que 𝑦1 é solução daequação diferencial
dada, encontrar a sua solução
geral.
✓ Solução:
𝑥2𝑦′′ + 2𝑥𝑦′ − 2𝑦 = 0; 𝑦1 𝑥 = 𝑥
𝑦′′ +2
𝑥𝑦′ −
2
𝑥2𝑦 = 0
𝑦2 = 𝑣𝑦1 ⇒ 𝑦1𝑣′′ + 2𝑦1
′ + 𝑓 𝑥 𝑦1 𝑣′ = 0
𝑥𝑣′′ + 2 1 +2
𝑥𝑥 𝑣′ = 0
𝑥𝑣′′ + 4𝑣′ = 0
2.5 EDOLH – Redução de ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
𝑥𝑣′′ + 4𝑣′ = 0 ou 𝑥𝑑𝑣′
𝑑𝑥+ 4𝑣′ = 0 ∴
𝑑𝑣′
𝑣′= −
4
𝑥𝑑𝑥
𝑑𝑣′
𝑣′= 4−
𝑑𝑥
𝑥+ 𝑐′ ∴ 𝑙𝑛𝑣′ = −4𝑙𝑛𝑥 + 𝑐′
∴ 𝑙𝑛𝑣′ = 𝑙𝑛𝑥−4 + 𝑐′ ∴ ln 𝑣′ = ln c′𝑥−4 ∴ 𝒗′ = 𝒄′𝒙−𝟒
ou𝑑𝑣
𝑑𝑥= c′𝑥−4 ∴ 𝑑𝑣 = 𝑐′𝑥−4𝑑𝑥
𝑑𝑣 = 𝑐′ 𝑥−4𝑑𝑥 + 𝑐′′ ∴ 𝑣 = −𝑐′𝑥−3
3+ 𝑐′′
𝑦 = 𝑣𝑥 → 𝑦 = −𝑐′𝑥−3
3+ 𝑐′′ 𝑥 ∴ 𝒚(𝒙) = 𝒄𝟏𝒙 − 𝒄𝟐𝒙
−𝟐
2.5 EDOLH – Redução de ordem
-
6/6/2019
69
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
✓ Exemplo 02: Sabendo-se que 𝑦1 é solução daequação diferencial
dada, encontrar a sua solução
geral.
✓ Solução:
𝑥2𝑦′′ − 3𝑥𝑦′ + 4𝑦 = 0; 𝑦1 𝑥 = 𝑥²
𝑦′′ −3
𝑥𝑦′ +
4
𝑥2𝑦 = 0
𝑦2 = 𝑣𝑦1 ⇒ 𝑦1𝑣′′ + 2𝑦1
′ + 𝑓 𝑥 𝑦1 𝑣′ = 0
𝑥2𝑣′′ + 2 2𝑥 −3
𝑥𝑥² 𝑣′ = 0
𝑥2𝑣′′ + 𝑥𝑣′ = 0 ∴ 𝑥𝑣′′ + 𝑣′ = 0
2.5 EDOLH – Redução de ordem
06/06/2019 12:31 CÁLCULO III - Equações Diferenciais Ordinárias
de Segunda Ordem
𝑥𝑣′′ + 𝑣′ = 0 ou 𝑥𝑑𝑣′
𝑑𝑥+ 𝑣′ = 0 ∴
𝑑𝑣′
𝑣′= −
1
𝑥𝑑𝑥
𝑑𝑣′
𝑣′= −
𝑑𝑥
𝑥+ 𝑐 ∴ 𝑙𝑛 𝑣′ = −ln 𝑥 + 𝑐′ ∴
∴ ln 𝑣′ = 𝑙𝑛 𝑥−1 + 𝑐 ∴ 𝒗′ = 𝒄′𝒙−𝟏 ou
𝑑𝑣
𝑑𝑥= c′𝑥−1 ∴ 𝑑𝑣 = 𝑐′𝑥−1𝑑𝑥
𝑑𝑣 = 𝑐′ 1
𝑥𝑑𝑥 + 𝑐′′ ∴ 𝑣 = 𝑐′ ln 𝑥 + 𝑐′′
𝑦 = 𝑣𝑥2 → 𝑦 = 𝑐′ ln 𝑥 + 𝑐′′ 𝑥2 ∴
𝒚(𝒙) = 𝒄𝟏 + 𝒄𝟐 𝐥𝐧 𝒙 𝒙𝟐
2.5 EDOLH – Redução de ordem