Embed Size (px)
Citation preview
UNIVERSIDADE ESTADUAL PAULISTA
FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
COMPARAÇÃO ENTRE MODELOS DO DISPOSITIVO
FACTS STATCOM PARA O ESTUDO DA
ESTABILIDADE A PEQUENAS PERTURBAÇÕES
Aline Petean Pina
Orientador: Prof. Dr. Percival Bueno de Araujo
Ilha Solteira – SP, Maio de 2010
Campus de Ilha Solteira
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
“Comparação entre Modelos do Dispositivo FACTS STATCOM para o Estudo da Estabilidade a Pequenas Perturbações”
ALINE PETEAN PINA
Orientador : Prof. Dr. Percival Bueno de Araujo
Dissertação apresentada à Faculdade de
Engenharia - UNESP – Campus de Ilha
Solteira, para obtenção do título de
Mestre em Engenharia Elétrica.
Área de Conhecimento: Automação.
Ilha Solteira – SP maio/2010
FICHA CATALOGRÁFICA
Elaborada pela Seção Técnica de Aquisição e Tratamento da Informação Serviço Técnico de Biblioteca e Documentação da UNESP - Ilha Solteira.
Pina, Aline Petean. P645c Comparação entre modelos do dispositivo FACTS STATCOM para o estudo da estabilidade a pequenas perturbações / Aline Petean Pina. Ilha Solteira : [s.n.], 2010 100 f. Dissertação (mestrado) - Universidade Estadual Paulista. Faculdade de Engenharia de Ilha Solteira. Área de conhecimento: Automação, 2010 Orientador: Percival Bueno de Araujo 1. Sistemas de energia elétrica - Estabilidade. 2. Modelo de sensibilidade de potência. 3. FACTS. 4. STATCOM.

Aos meus avôs Pedro e Walter e minhas avós Annete e Luzia
Agradecimentos
Desejo agradecer a todos com quem convivi nos anos de graduação e mestrado.
Principalmente gostaria de agradecer:
Ao meu orientador, professor Percival Bueno de Araujo por sua excelente orientação
no desenvolvimento desta dissertação, aos ensinamentos passados e, principalmente, pela
amizade compartilhada durante minha vida acadêmica.
Aos professores: Dionízio Paschoareli Júnior, Anna Diva Plasencia Lotufo e Laurence
Duarte Colvara pelas sugestões e ensinamentos dados, todos decisivos na conclusão deste
trabalho.
Aos amigos da pós-graduação e em especial aos do grupo de estudo: Carlos Pupin,
Marcos, André, Ricardo, Maxwell, Naryanne e João com quem tive o prazer de conviver e
tiveram grande participação no desenvolvimento deste trabalho.
Aos grandes amigos com quem convivo há longa data: Suzana, Ana Claudia, Graziele,
Felipe, Thiago e Ary.
À minha grande família, que sempre me apoiou e aconselhou em todos os momentos
de minha vida. Aos meus tios Carlos e Rose por todo o carinho e cuidado, tia Marilene pela
amizade.
À minha irmã Ticiana, pelo apoio e confiança que deposita em todos os meus atos, à
minhas irmãs Fabiana e Gabriela pelo amor e Letícia e Igor pelo carinho.
À minha querida mãe Magda por todo amor, carinho e dedicação oferecidos a mim,
mesmo que em espírito.
À meu pai Lázaro, por todo o amor e suporte fornecido, serei grata pela eternidade.
Á meu companheiro Augusto pelo apoio, ajuda e carinho.
A UNESP pela excelente qualidade no ensino oferecido, em especial ao Departamento
de Engenharia Elétrica, e ao CNPq pelo apoio financeiro.

RReessuummoo
Resumo
Este trabalho apresenta estudos referentes à modelagem do dispositivo FACTS
STATCOM para posterior inclusão nas equações do Modelo de Sensibilidade de Potência
multimáquinas. O objetivo final da modelagem é o estudo da estabilidade a pequenas
perturbações de sistemas elétricos de potência.
São considerados dois modelos para o dispositivo: um primeiro modelo permite
apenas a compensação de potência reativa, enquanto que num segundo modelo é possível a
compensação tanto de potência ativa como de potência reativa.
Também são sugeridos controladores para o dispositivo FACTS STATCOM e, neste
trabalho, estes controladores são descritos por blocos de primeira ordem.
Com o equacionamento do sistema elétrico realizado, seu modelo é implementado
computacionalmente para se efetuar simulações para se avaliar a estabilidade a pequenas
perturbações.
As simulações estão baseadas na análise no domínio do tempo e no domínio da
frequência, utilizando os dois modelos desenvolvidos para o STATCOM.
A partir dos resultados obtidos pelas simulações, análises são realizadas, e discutidos
os principais aspectos referentes à estabilidade a pequenas perturbações de sistemas elétricos
de potência.
Palavras-chave: Estabilidade a Pequenas Perturbações, Sistemas Elétricos de Potência,
Oscilações Eletromecânicas, Modelo de Sensibilidade de Potência, FACTS, STATCOM.

AAbbssttrraacctt
Abstract
This work presents studies referred to the modeling of the FACTS STATCOM device
to include in multi-machine Power Sensitivity Model equations. The aim is to study electrical
system stability under small perturbations.
Two models are considered for the device: the first one allows only the reactive power
compensation, while the other one allows the reactive or active compensation.
Controllers for the FACTS STATCOM device are also suggested, and in this work
they are described by first order blocks.
As the electrical system equations are finalized, the model is computationally
implemented to effectuate simulations and evaluate the stability under small perturbations.
The simulations are based on the time and frequency domain using the two models
developed for the FACTS STATCOM device.
Considering the results obtained by the simulations the analysis are realized and
discussed the principal aspects referred to the electrical Power system stability under small
perturbations.
Keywords – Electric Power Systems, Small-Signal Stability, Electromechanical Oscillations,
Power Sensitivity Model, FACTS, STATCOM.
LLiissttaa ddee FFiigguurraass
Lista de Figuras
Página
Capítulo 2
Figura 2.1 – Enrolamentos do Gerador Síncrono Trifásico – 2 Pólos. . . . . . . . . . . . . . . . . . . 26
Figura 2.2 – Diagrama Unifilar do Gerador Síncrono. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figura 2.3 – Diagrama Unifilar : Gerador genérico k. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figura 2.4 – Balanço Nodal de Potência: Barra genérica k. . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figura 2.5 – MSP Multimáquinas: Representação no Domínio da Freqüência . . . . . . . . . . . .41
Capítulo 3
Figura 3.1 – Configuração Básica do Dispositivo FACTS STATCOM . . . . . . . . . . . . . . . . 45
Figura 3.2 – Curva Característica V x I do STATCOM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
Figura 3.3 – Representação Simplificada do Dispositivo FACTS STATCOM. . . . . . . . . . . .47
Figura 3.4 – Modelo do Controlador Simplificado do Dispositivo FACTS STATCOM. . . . 48
Figura 3.5 – Sistema Elétrico com um STATCOM (Modelo Simplificado) em Operação. . .51
Figura 3.6 – Sistema Exemplo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 3.7 – Representação Detalhada do Dispositivo FACTS STATCOM. . . . . . . . . . . . . .57
Figura 3.8 – Diagrama Fasorial: Tensões kV e sV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Figura 3.9 – Sistema Elétrico com um STATCOM (Modelo Detalhado) em Operação. . . . . 58
Figura 3.10 – Modelo do Controlador Detalhado do Dispositivo FACTS STATCOM . . . . . 62
Capítulo 4
Figura 4.1 – Diagrama Unifilar: Sistema Simétrico de Duas Áreas. . . . . . . . . . . . . . . . . . . . 72
Figura 4.2 – Variações da Velocidade Angular – Caso Base. . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figura 4.3 – Variações do Ângulo Interno – Caso Base. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figura 4.4 – Variações dos Ângulos Internos – STATCOM: Modelo Simplificado . . . . . . . . 76
Figura 4.5 – Variações dos Ângulos Internos – STATCOM: Modelo Detalhado . . . . . . . . . . 77
Figura 4.6 – Fluxo de Potência Ativa- STATCOM : Modelo Detalhado . . . . . . . . . . . . . . . . 78
Figura 4.7 – Defasagem Angular (∆δ2 – ∆δ1): STATCOM Simplificado e Detalhado . . . . . . 80

LLiissttaa ddee FFiigguurraass
Figura 4.8 – Defasagem Angular (∆δ3 – ∆δ1): STATCOM Simplificado e Detalhado . . . . . . 80
Figura 4.9 – Variação da Tensão: Barra 8: STATCOM Simplificado e Detalhado. . . . . . . . . 81
Figura 4.10 – Variação do Fluxo de Potência Ativa entre as Barras 7 e 8: STATCOM
Simplificado e Detalhado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Apêndice I
Figura I.1 – Sistemas de coordenadas r,m e d,q. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Apêndice II
Figura II.1 – Diagrama Unifilar – Sistema de 2 Áreas, 4 Geradores e 10 Barras. . . . . . . . . 97

LLiissttaa ddee TTaabbeellaass
Lista de Tabelas
Página
Capítulo 4
Tabela 4.1 – Autovalores Dominantes, Frequência Natural Não Amortecida e Coeficientes de
Amortecimento – Caso Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Tabela 4.2 – Autovalores Dominantes, Frequência Natural Não Amortecida e Coeficientes de
Amortecimento – STATCOM: Modelo Simplificado . . . . . . . . . . . . . . . . . . . . .75
Tabela 4.3 – Autovalores Dominantes, Frequência Natural Não Amortecida e Coeficientes de
Amortecimento – STATCOM: Modelo Detalhado. . . . . . . . . . . . . . . . . . . . . . .77
Tabela 4.4 – Autovalores Dominantes, Frequência Natural Não Amortecida e Coeficientes de
Amortecimento – STATCOM: Modelo Detalhado (apenas compensação de
reativos) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Tabela 4.5 – Valores de Regime Permanente: Tensão da Barra 8, Ângulo Interno das
Máquinas e Fluxo de Potência Ativa: STATCOM Simplificado e Detalhado . . 82
Apêndice II
Tabela II.1 – Dados das Máquinas Geradoras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Tabela II.2 – Dados dos Reguladores Automáticos de Tensão. . . . . . . . . . . . . . . . . . . . . . . 98
Tabela II.3 – Dados das Linhas de Transmissão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Tabela II.4 – Dados das Barras – Caso Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Tabela II.5 – Dados dos Controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99

LLiissttaa ddee SSíímmbboollooss ee AAbbrreevviiaattuurraass
Lista de Símbolos e Abreviaturas
FACTS – Flexible Alternating Current Transmission Systems
ONS – Operador Nacional do Sistema Elétrico
SIN – Sistema Interligado Nacional
RAT – Regulador Automático de Tensão
MHP – Modelo de Heffron & Phillips
MSP – Modelo de Sensibilidade de Potência
PSS – Power System Stabilizer
CA – Corrente Alternada
CC – Corrente Contínua
GTO – Gate Turn-Off Thyristor
TCSC – Thyristor Controlled Series Capacitor
SVC – Static Var Compensator
PS – Phase Shifter (Transformador defasador)
STATCOM – Static Synchronous Compensator
SSSC – Static Synchronous Series Compensator
UPFC – Unified Power Flow Controller
SVS – Synchronous Voltage Source
POD – Power Oscillation Damping
VSC – Voltage Source Converter
REF – Referência Adotada para o Sistema Elétrico
L.T. – Linha de Transmissão
A1Gk, A2Gk, A3Gk – Coeficientes de sensibilidade da potência ativa do gerador k
A1km, A2km, A3km – Coeficientes de sensibilidade da potência ativa da L.T. k-m
Ak, ADC, Ac, AΨ – Coeficientes de sensibilidade da potência ativa do STATCOM

LLiissttaa ddee SSíímmbboollooss ee AAbbrreevviiaattuurraass
c – Variável de controle do STATCOM
Ccc – Capacitância do STATCOM
Dk – Coeficiente de amortecimento inerente do gerador k
Eak – Tensão de definição da posição do sistema de coordenadas rotativo
Efdk – Tensão no enrolamento de campo do gerador k
E'dk – Tensão interna em eixo direto do gerador k
E'qk – Tensão interna em quadratura do gerador k
IDC – Corrente elétrica do lado cc do STATCOM
Idk – Componente de eixo direto da corrente da barra k
Ik – Corrente elétrica do gerador k
IS – Corrente elétrica fornecida ou absorvida com o STATCOM
Iqk – Componente de eixo em quadratura da corrente da barra k
J1, J2, J3, J4, J11, J12, J21, J22, B1, B2 – Matrizes jacobianas do MSP
J12STATCOM, J21STATCOM, J22STATCOM – Matrizes jacobianas do MSP com STATCOM
KAk, KVk – Coeficientes da reação de armadura do gerador k no MSP
KS, KP, KC, KΨ – Ganhos dos controladores de primeira ordem
Kc1, Kc2, Kc3, Kc4, Kc5, Kc6 – Coeficientes da variável de controle c
Ks1, Ks2, Ks3, Ks4, Ks5, Ks6 – Coeficientes da variável de controle Is
KΨ1, KΨ2, KΨ3– Coeficientes da variável de controle Ψ
Krk – Ganho do RAT
Mk = 2Hk – Constante de Inércia do gerador k
Px'dk – Potência ativa pela reatância de eixo direto k
PGk – Potência ativa gerada pelo gerador k
Pkm – Fluxo de potência ativa entre as barras k e m
PLk – Carga ativa da barra k
LLiissttaa ddee SSíímmbboollooss ee AAbbrreevviiaattuurraass
PMeck – Potencia mecânica de entrada do gerador k
PS – Potência ativa do STATCOM
Qx'dk – Potência reativa pela reatância de eixo direto k
QGk – Potência reativa gerada pelo gerador k
Qkm – Fluxo de potência reativa entre as barras k e m
QLk – Carga reativa da barra k
QS – Potência ativa do STATCOM
R1Gk, R2Gk, R3Gk – Coeficientes de potência reativa do gerador k
R1km, R2km, R3km – Coeficientes de potência reativa da linha de transmissão k-m
Rk, RDC, Rc, RΨ – Coeficientes de sensibilidade da potência reativa do STATCOM
Rkm – Resistência da linha de transmissão entre as barras k e m
Skm – Potência complexa que sai da barra k em direção a barra m
s – Operador de Laplace
T – Matriz de Transformação de Coordenadas
T'd0k – Constante de tempo transitória de eixo direto do gerador k
TMk – Torque mecânico de entrada do gerador k
Trk – Constante de tempo do RAT
TC – Constante de Tempo do controlador
TΨ – Constante de tempo do controlador
Vdk – Componente de eixo direto da tensão da barra k
Vk – Magnitude da tensão da barra k
VS – Magnitude da tensão da barra de instalação do STATCOM
VAC – Tensão do terminal ac do STATCOM
VDC – Tensão do terminal cc do STATCOM
Vqk – Componente de eixo em quadratura da tensão da barra k.
LLiissttaa ddee SSíímmbboollooss ee AAbbrreevviiaattuurraass
Vref k – Tensão de referência para o RAT
VS0 – Tensão de referência do STATCOM
x~ – Fasor da variável x
xsdt – Reatância do transformador de acoplamento do STATCOM
xdk – Reatância síncrona de eixo direto do gerador k
x'dk – Reatância transitória de eixo direto do gerador k
Xkm – Reatância da linha de transmissão entre as barras k e m
xqk – Reatância síncrona de eixo em quadratura do gerador k
Zkm – Impedância da linha de transmissão entre as barras k e m
θS – Ângulo da tensão do STATCOM
δk – Ângulo interno do gerador k
θk – Ângulo da tensão da barra k
θkm – Diferença entre os ângulos das tensões da barra k e m (θkm = θk - θm)
Ωk – Conjunto de barras vizinhas à barra k
ωk – Velocidade Angular do gerador k
ω0 – Velocidade Angular síncrona – 377 rad/s
ωn – frequência natural do laço eletromecânico
ξ – Amortecimento relacionado a uma oscilação
ψ –Variável de controle do STATCOM
•
X – Representa a derivada da variável X
=•
dt
dXX
∆ – Representa pequenas variações em torno do ponto de equilíbrio
(r,m) – Sistema de coordenadas fixo, eixos real e imaginário
(d,q) – Sistema de coordenadas rotativo, eixos direto e em quadratura
SSuummáárr iioo
Sumário
Introdução ...................................................................................................................17
Modelo de Sensibilidade de Potência (MSP) Multimáquinas...................25 2.1 Introdução................................................................................................................. 25 2.2 Equações Básicas do Sistema Multimáquinas.......................................................... 25 2.3 Coeficientes dos Geradores ...................................................................................... 28 2.4 Coeficientes das Linhas de Transmissão.................................................................. 30 2.5 Equações de Movimento do Gerador Síncrono........................................................ 32 2.6 Circuito de Campo e Sistema de Excitação do Gerador Síncrono ........................... 32 2.7 Balanço Nodal de Potências ..................................................................................... 33 2.8 Representação do MSP-multimáquinas no Domínio do Tempo .............................. 34 2.9 Representação do MSP-multimáquinas no Domínio da Frequência ........................ 39 2.10 Conclusões.............................................................................................................. 42
Modelos do Dispositivo FACTS STATCOM..................................................44 3.1 Introdução................................................................................................................. 44 3.2 Configuração Básica e Princípio de Funcionamento do STACOM......................... 44 3.3 Modelo Dinâmico Simplificado do Dispositivo FACTS STATCOM ..................... 47 3.4 Modelo Dinâmico Detalhado do Dispositivo FACTS STATCOM ......................... 57 3.5 Conclusões................................................................................................................ 69
Resultados e Simulações.........................................................................................71 4.1 Introdução................................................................................................................. 71 4.2 Sistema Simétrico de Duas Áreas – Caso Base........................................................ 71 4.3 Simulações: Dispositivo FACTS STATCOM: Modelo Simplificado ..................... 74 4.4 Simulações: Dispositivo FACTS STATCOM: Modelo Detalhado.......................... 76 4.5 Simulações: Comparação entre as modelagens do Dispositivo FACTS STATCOM: Modelo Simplificado e Modelo Detalhado............................ 78 4.6 Conclusões................................................................................................................ 82
Conclusões...................................................................................................................84
Referências..................................................................................................................87
Apêndice I. Matriz de Transformação de Coordenadas............................95

SSuummáárr iioo
Apêndice II. Dados do Sistema Multimáquinas Utilizado.........................97
Anexo. Artigos Publicados e Submetido........................................................100

CCaappííttuulloo 11
17
Capítulo 1
Introdução
Atualmente a produção de energia elétrica vem se tornando cada vez mais
problemática. Um dos motivos é o fato dos limites exploratórios das fontes energéticas
viáveis comercialmente estão próximos, e, em muitos casos, sem possibilidade de ampliação
dessa oferta. Outro motivo, não menos importante, é que a exploração dessas fontes de
energia causaria, de maneira geral, inúmeros problemas ambientais e que não são mais
tolerados pela sociedade, como acontecia no passado.
Contudo, o aumento da geração de energia elétrica se torna cada dia mais necessário e
este tem sido o principal problema enfrentado na área de sistemas de energia elétrica.
Inovações tecnológicas apontam uma saída provisória, como a utilização de dispositivos
FACTS. Estes equipamentos possibilitam um aumento de transmissão de energia elétrica por
uma linha de transmissão, adiando a construção de novas linhas. Fontes alternativas de
geração de energia estão em intensivos planejamento e estudo, tais como o aproveitamento de
energia eólica, energia das marés, geradores de fusão, fontes alternativas para geração de
energia limpa e de menor custo ambiental.
Por outro lado, a geração de nada basta se a energia elétrica não for devidamente
fornecida aos seus mercados consumidores e, para isso, têm-se cada vez mais necessitado de
longas linhas de transmissão, visto que as unidades geradoras com potencial para serem
exploradas, muitas vezes se encontram muito afastadas dos principais centros consumidores.
É nesse contexto que se situa o conceito de estabilidade, que contribui para tornar o
sistema mais confiável e seguro, garantindo que a energia elétrica sempre será entregue em
níveis adequados de tensão e frequência, independente das condições de operação do sistema.
Mais especificamente em sistemas de energia elétrica, a estabilidade se refere ao
comportamento do sistema após este sofrer algum tipo de perturbação (seja esta perturbação
grande ou pequena), deslocando-o do seu ponto de equilíbrio inicial.
Como exemplo de grande perturbação pode-se citar um curto-circuito no sistema
elétrico. A variação normal da carga em torno de uma média histórica exemplifica uma
pequena perturbação.

CCaappííttuulloo 11
18
Em função do tipo de perturbação, tem-se então a divisão do estudo da estabilidade em
ramos distintos: a estabilidade transitória (que estuda as primeiras oscilações do sistema após
uma grande perturbação) e a estabilidade dinâmica ou mais recentemente intitulada como
estabilidade a pequenas perturbações ou estabilidade de regime permanente (que se restringe à
restauração da nova condição de regime permanente do sistema após a ocorrência de
pequenos distúrbios) (BRETAS ; ALBERTO, 2000; INSTITUTO DE ENGENHEIROS
ELETRICISTAS E ELETRÔNICOS- IEEE/CONSEIL INTERNATIONAL DES
GRANDS RÉSEAUX ÉLECTRIQUES-CIGRE, 2003).
Quando da ocorrência de uma pequena perturbação, as equações que descrevem o
sistema elétrico de potência, geralmente não lineares, podem ser linearizadas em torno de um
ponto de equilíbrio estável e, desta maneira, todas as propriedades aplicáveis à análise de
sistemas lineares podem ser utilizadas.
Este trabalho trata do estudo da estabilidade a pequenas perturbações e, para se ter
uma idéia da importância destes estudos, dados do ONS (Operador Nacional do Sistema
Elétrico) referentes ao SIN (Sistema Interligado Nacional) mostram uma ocorrência média de
2258 perturbações por ano nos últimos anos. Dentre estas perturbações, 266 foram com corte
de carga (103 com corte de carga superior a 50 MW e 48 com corte de carga superior a 100
MW). Algumas destas perturbações, mesmo sendo consideradas como de pequena
intensidade, poderiam levar o sistema à instabilidade, dependendo de suas condições de
operação (ONS, 2010).
Para o estudo da estabilidade dinâmica é importante a escolha apropriada da
modelagem matemática para uma fiel e correta representação. Até os anos 50 um modelo
muito utilizado era o chamado “Modelo Clássico – Tensão Constante atrás de Reatância
Transitória” (YU, 1983; KUNDUR, 1994; ANDERSON ; FOUAD, 2003). Este modelo
permitia a avaliação do coeficiente de sincronização do gerador, que era o principal fator a ser
considerado no estudo da estabilidade do sistema elétrico.
Com o desenvolvimento tecnológico que permitiu a construção de sistemas elétricos
interligados surgiram também oscilações eletromecânicas de baixa frequência fracamente
amortecidas ou até mesmo instáveis (não amortecidas), que são originadas da interação dos
rotores das inúmeras máquinas do sistema elétrico.
Os modos de oscilação eletromecânicos podem ser classificados segundo sua
frequência. Modos locais de oscilação se encontram na faixa de 0,7 a 2,0 Hz e estão
associados às oscilações dos rotores de um grupo de geradores próximos, fisicamente ou
CCaappííttuulloo 11
19
eletricamente. Modos interárea de oscilação localizam-se na faixa de 0,1 a 0,8 Hz e são
relacionados com as oscilações de grupos de geradores de uma área contra outro grupo de
geradores de outra área (LARSEN ; SWAN, 1981; YU, 1983; KUNDUR, 1994; SAUER ;
PAI, 1998; ANDERSON ; FOUAD, 2003).
A partir de então se constatou que em alguns casos, mesmo na ocorrência de grandes
perturbações, os sistemas elétricos não perdiam a estabilidade na primeira oscilação e sim
após um intervalo de tempo. Neste caso a instabilidade ocorria na forma de oscilações de
amplitudes crescentes e era constatada depois de alguns segundos ou até mesmo minutos após
a ocorrência da perturbação.
Um fator que contribuiu para o surgimento dessas oscilações foi a utilização dos
reguladores automáticos de tensão estáticos (caracterizados por altos ganhos e baixas
constantes de tempo) nos geradores síncronos, que vieram para substituir os reguladores
anteriores que eram eletromecânicos e de lenta atuação. Em situações de carga plena, esses
reguladores eletrônicos aumentavam o coeficiente de sincronização dos geradores, mas ao
mesmo tempo causavam um impacto negativo no amortecimento do sistema (DeMELLO ;
CONCORDIA, 1969).
No final da década de 60, as análises realizadas por DeMello e Concordia (DeMELLO
; CONCORDIA, 1969.) esclareceram como os reguladores automáticos de tensão afetavam
prejudicialmente a estabilidade dos sistemas elétricos. Para a realização desses estudos, foi
utilizado o modelo linearizado de Heffron-Phillips (MHP) (HEFFRON ; PHILLIPS, 1952;
DeMELLO ; CONCORDIA, 1969; YU, 1983; KUNDUR, 1994; ANDERSON ; FOUAD,
2003), que considera um gerador síncrono conectado a uma barra infinita através de uma
impedância externa, a qual representa a linha de transmissão (sistema de transmissão externo).
Uma barra infinita é caracterizada por possuir tensão e frequência constantes, ou seja,
qualquer perturbação na máquina geradora não causará distúrbios na barra infinita (YU, 1983;
KUNDUR, 1994; ANDERSON ; FOUAD, 2003; BRETAS ; ALBERTO, 2000).
Em seus estudos DeMello e Concordia levaram em consideração os conceitos de
torque sincronizante (torque elétrico em fase com as variações angulares do rotor) e torque de
amortecimento (torque elétrico em fase com as variações da velocidade angular do rotor),
para esclarecer os efeitos dos reguladores automáticos de tensão.
O bom resultado obtido da utilização do MHP para sistemas do tipo máquina-
barramento infinito motivou novas tentativas para sua ampliação para sistemas multimáquinas
(MHP-multimáquinas), para assim representar as interações entre as diversas unidades
CCaappííttuulloo 11
20
geradoras do sistema elétrico, bem como da malha de transmissão e controladores (MOUSSA
; YU, 1974).
Contudo, na análise da estabilidade a pequenas perturbações o MHP-multimáquinas
apresenta limitações, tanto pela exigência de uma referência angular para o sistema elétrico,
como também pela redução do sistema elétrico de potência às barras internas de geração
(onde estão conectados os geradores), o que acarreta a eliminação do sistema de transmissão
externo.
Como alternativa para sanar estas limitações do MHP-multimaquinas, Deckmann e da
Costa propuseram outro modelo, baseado em coeficientes de sensibilidade de potências ativa
e reativa no então denominado “Modelo de Sensibilidade de Potência – MSP” (DECKMANN
; DA COSTA, 1994).
No caso do MSP aplicado a um sistema do tipo “máquina síncrona ligada a uma barra
infinita” também foram realizados estudos similares aos de DeMello e Concordia (DeMELLO
; CONCORDIA, 1969) a respeito dos torques de amortecimento e sincronizante, obtendo-se
resultados compatíveis (DECKMANN ; DA COSTA, 1993).
O modelo desenvolvido para simulação e análise da dinâmica de baixa frequência tem
como característica inerente a sua extensão ao sistema multimáquinas e apresenta como
vantagem a decomposição entre subsistemas ativo e reativo, que permite separar as respostas
do sistema elétrico às solicitações de potência ativa e potência reativa. Outra vantagem é a
decomposição temporal entre as variáveis de estado (de natureza lenta) e as variáveis
algébricas (de natureza rápida) (DA COSTA, 1992).
O MSP apresenta uma grande facilidade de extensão a sistemas multimáquinas por
conservar todas as barras do sistema e, deste modo também facilita a inclusão de novos
dispositivos ao modelo, tais como os dispositivos FACTS (Flexible Alternating Current
Transmission Systems) e controladores adicionais como o PSS (Power System Stabilizer)
(NASSIF, 2004; FURINI, 2008; FURINI ; ARAUJO, 2008; PUPIN et al., 2009; PEREIRA,
2009).
Nos trabalhos desenvolvidos por DeMello e Concórdia foi proposta a utilização de
sinais estabilizantes suplementares na busca de acrescentar torque de amortecimento às
oscilações do rotor da máquina síncrona, utilizando os chamados Estabilizadores de Sistema
de Potência (ESP) (no inglês, Power System Stabilizers – PSSs) (DeMELLO ; CONCORDIA,
1969; LARSEN ; SWANN, 1981). Porém, considerando sistemas multimáquinas, o PSS
geralmente acresce somente torque de amortecimento às oscilações de modo local, não
CCaappííttuulloo 11
21
mostrando significativa contribuição às oscilações de modo interárea (MARTINS, 1986;
YANG et al., 1998; MOTA ; NASCIMENTO, 2008).
Com o grande avanço da eletrônica de potência, principalmente a de alta potência,
tornou-se possível a aplicação de dispositivos nas linhas de transmissão que controlassem o
fluxo de potência passante, podendo assim direcionar o fluxo de energia para regiões de baixo
carregamento, aliviando os sistemas de transmissão considerados “fracos”. Surgiu então o
conceito de dispositivos FACTS (Flexible AC Transmission Systems), que foram
desenvolvidos com o objetivo inicial de aumentar a capacidade de transmissão e controle do
fluxo de potência em uma rede, aumentando assim os limites operacionais e de estabilidade
(WATANABE et al., 1998; HINGORANI, 1998; SONG ; JOHNS, 1999; HINGORANI ;
GYUGYI, 2000; MATHUR, 2002).
Os FACTS podem ser divididos em duas categorias, de acordo com sua geração. Os da
primeira geração utilizam chaves tiristoras para aplicar cotas de potência reativa, a segunda
geração aplica semicondutores auto-comutados como, por exemplo, o GTO (Gate Turn-Off).
São da primeira geração os dispositivos FACTS como o TCSC (Thyristor Controlled
Series Capacitor), SVC (Static Var Compensator) e o PS (Phase-Shifter). Todos utilizam
chaves tiristoras para controle de potência reativa provida de bancos de capacitores ou
indutores (GYUGYI, 1988; ARAÚJO ; ARAUJO, 2002; ARAÚJO ; ARAUJO, 2003;
COLMAN ; ARAUJO, 2004; PEREIRA ; ARAUJO, 2006; PEREIRA et al., 2008; FURINI ;
ARAUJO, 2008).
Da segunda geração têm-se o STATCOM (Static Synchronous Compensator), o SSSC
(Static Synchronous Series Compensator), o UPFC (Unified Power Flow Controller) e o IPFC
(Interline Power Flow Controller). Estes dispositivos são capazes de trocar potência ativa e
reativa com o sistema de potência, através de fontes internas de tensão síncrona (SVS – do
inglês Synchronous Voltage Source) com amplitude e ângulo controlados por semicondutores
auto-comutados (GYUGYI, 1994; GYUGYI, 1995; GYUGYI , 1998; CIGRÉ TASK FORCE,
1999; HINGORANI ; GYUGYI, 1999; SONG ; JOHNS, 1999; MATHUR, 2002; NASSIF et
al., 2004; PUPIN et al., 2009).
Com a introdução dos dispositivos FACTS nos sistemas de potência, estes ganharam
melhorias no que diz respeito à estabilidade. Frente a grandes perturbações (estabilidade
transitória), estes dispositivos podem chavear grandes capacitores facilitando o transporte de
grandes blocos de energia.
Além disso, controladores adicionais do tipo ESP podem ser acoplados aos
CCaappííttuulloo 11
22
dispositivos FACTS que, quando bem ajustados, podem introduzir amortecimento ao sistema
elétrico de potência, garantindo assim sua estabilidade a pequenas perturbações.
Este procedimento já foi adotado com dispositivos FACTS de primeira geração em
sistemas máquina-barra infinita (WANG et al., 1997 (1); WANG ; SWIFT 1998 (1);
ARAÚJO ; ARAUJO, 2003; COLMAN ; ARAUJO, 2004; PEREIRA et al., 2008) e sistemas
multimáquinas (MARTINS ; LIMA, 1990; WANG et al., 1997; WANG ; SWIFT 1998;
YANG et al., 1998; FEBRES et al, 2008; MOTA ; NASCIMENTO, 2008;
ZARRINGHALAMI ; GOLKAR, 2008).
Controladores do tipo POD (Power Oscillation Damping) também podem
desempenhar o papel de introduzir amortecimento ao sistema elétrico com grande eficácia,
quando acoplados a dispositivos FACTS de primeira ou segunda geração, e também para
sistemas do tipo máquina-barra infinita ou multimáquinas (NASSIF et al., 2004; ABIDO,
2005; FURINI ; ARAUJO, 2008; PEREIRA et al., 2009).
Em comum, em todos os estudos é necessário um modelo que descreva o mais
fielmente possível o sistema elétrico de potência, bem como seus controladores e
compensadores.
Neste trabalho o foco principal é o estudo da estabilidade a pequenas perturbações e,
portanto, os modelos desenvolvidos serão lineares.
O dispositivo FACTS de interesse é o STATCOM (CHUN et al., 1998; CIGRÉ TASK
FORCE, 1999; NASSIF, 2004; LOPES, 2006; PEREIRA, 2009; PEREIRA et al., 2009) e será
tratada de sua modelagem para utilização em estudos da estabilidade a pequenas perturbações.
A literatura apresenta, de maneira geral, dois modelos para o STATCOM que podem
ser utilizados nestes estudos.
Um primeiro modelo, que aqui será chamado de “modelo simplificado”, o STATCOM
é representado por uma fonte de corrente controlável em derivação, sem capacidade de troca
de potência ativa com o sistema elétrico, por não ser representada nenhuma fonte de tensão no
lado CC do dispositivo (CIGRÉ TASK FORCE, 1999; SONG ; JOHNS, 1999; HINGORANI
; GYUGYI, 2000; NASSIF, 2004; PEREIRA, 2009). Dito de outra forma, o STATCOM
representado pelo seu modelo simplificado é capaz de realizar apenas compensação reativa no
sistema elétrico de potência.
Um segundo modelo, que neste trabalho será chamado de “modelo detalhado”, o
STATCOM pode realizar a compensação reativa bem como trocar potência ativa com o
sistema de potência (CIGRÉ TASK FORCE, 1999). Esta característica se torna possível

CCaappííttuulloo 11
23
porque o STATCOM, representado pelo modelo detalhado, apresenta duas variáveis de
controle.
A literatura especializada apresenta o STATCOM representado pelo seu modelo
simplificado acoplado ao sistema de potência do tipo máquina-barra infinita, modelado
através do MHP ou MSP (WANG ; SWIFT, 1998; NASSIF, 2004; NASSIF et al., 2004). O
mesmo ocorre para o sistema multimáquinas: está presente na literatura o STATCOM
representado pelo seu modelo simplificado tanto para o sistema elétrico modelado pelo MHP-
multimáquinas como pelo MSP-multimáquinas (ABIDO, 2005; NASSIF, 2004; PEREIRA,
2009; PEREIRA et al., 2009).
Em se tratando do STATCOM representado pelo seu modelo detalhado, encontrou-se
na literatura a sua consideração de atuação apenas quando o sistema de potência era descrito
pelo MHP, tanto para sistema máquina-barra infinita como sistema multimáquinas (WANG,
1999; WANG, 2000; WANG, 2003; KOBAIASHI et al., 2003; RAHIM et al., 2004;
BAMASAKI ; ABIDO, 2005; ZARRINGHALAMI ; GOLKAR, 2008).
Em vista disso, o principal escopo deste trabalho é o estudo e a modelagem do
STATCOM representado pelo seu modelo detalhado, para posterior acoplamento às equações
do sistema elétrico de potência multimáquinas, quando este é descrito pelo MSP-
multimáquinas.
Esta modelagem poderá então ser utilizada para a análise da estabilidade do sistema
elétrico de potência quando este for submetido a uma pequena perturbação.
Em termos de organização do texto, no Capítulo 2 são mostradas as equações do MSP
multimáquinas, bem como suas representações no domínio do tempo e no domínio da
frequência, sem a consideração do dispositivo FACTS STATCOM.
No Capítulo 3 é realizada a apresentação do modelo simplificado e sua modelagem
para a inclusão nas equações do MSP desenvolvido no Capítulo 2. Também é sugerido um
controlador de primeira ordem para modular sua variável de controle.
Também no Capítulo 3 são apresentados os estudos referentes ao modelo detalhado do
STATCOM, resultando nas equações que serão acopladas às do MSP (deduzidas no Capítulo
2), bem como de um controlador para suas variáveis de controle.
As formulações desenvolvidas no Capítulo 3 fornecerão um modelo modificado do
MSP, com a consideração do sistema de potência multimáquinas operando com dispositivos
FACTS STATCOM representados de forma simplificada e forma detalhada.
No Capítulo 4 são apresentados os resultados e as simulações decorrentes da

CCaappííttuulloo 11
24
implementação computacional dos modelos desenvolvidos nos Capítulos 2 e 3 para um
sistema teste muito utilizado na literatura (sistema simétrico de duas áreas).
A partir dos resultados obtidos é realizada uma análise preliminar da estabilidade a
pequenas perturbações do sistema elétrico de potência. Esta análise é efetuada nos domínios
do tempo (através de curvas de respostas a distúrbios) e da frequência (através dos
autovalores da matriz de estado).
Seguem as principais conclusões e sugestões para trabalhos futuros (Capítulo 5), as
Referências Bibliográficas, Apêndices e Anexo, necessários para uma melhor compreensão
do trabalho.
CCaappííttuulloo 22
25
Capítulo 2
Modelo de Sensibilidade de Potência (MSP) Multimáquinas
2.1 Introdução
O Modelo de Sensibilidade de Potência – MSP (DA COSTA, 1992; DECKMANN ;
DA COSTA, 1994) que pode ser utilizado no estudo das oscilações eletromecânicas de baixa
frequência em sistemas de energia elétrica surge como alternativa ao modelo de Heffron e
Phillips, largamente utilizado na literatura (DeMELLO ; CONCORDIA, 1969; MOUSSA ;
YU, 1974; KUNDUR, 1994; ANDERSON ; FOUAD, 2003). O MSP baseia-se no princípio
de que os balanços de potência ativa e potência reativa devem ser satisfeitos continuamente
em qualquer barra do sistema elétrico durante todo processo dinâmico.
Para o MSP não é necessária a representação de um barramento infinito nem a redução
do sistema externo de transmissão às barras internas dos geradores. Este último fato torna
direta a extensão do MSP para sistemas de potência multimáquinas.
Neste capítulo é apresentado o MSP para o sistema de potência multimáquinas, no
qual são definidas equações algébricas e equações diferenciais que passam a representar o
sistema de potência.
Definidas as equações que representam o sistema elétrico de potência pelo MSP-
multimáquinas, este será representado no domínio do tempo e no domínio da frequência.
2.2 Equações Básicas do Sistema Multimáquinas
Para a dedução do MSP será considerado um gerador síncrono trifásico no qual são
representados os três enrolamentos do estator (enrolamentos das fases a, b e c) e também um
enrolamento do rotor (o enrolamento de campo – fd), conforme o esquema mostrado na
Figura 2.1, para um gerador de dois polos. Os efeitos dos enrolamentos amortecedores não
serão considerados.
Os enrolamentos do estator não se movimentam e suas grandezas são medidas em um
sistema de coordenadas fixo (r,m). O enrolamento de campo localizado sobre o rotor se move

CCaappííttuulloo 22
26
com uma velocidade angular ω e suas grandezas são medidas no sistema de coordenadas (d,q)
que gira junto com o rotor.
Figura 2.1: Enrolamentos do Gerador Síncrono Trifásico – 2 Pólos
Têm-se, portanto, dois sistemas de coordenadas atuando ao mesmo tempo e, para
facilidade de manipulação das equações, é realizada uma transformação de coordenadas que
permite referir as grandezas do sistema de coordenadas fixo (r,m) ao sistema de coordenadas
rotativo (d,q) e vice-versa.
A transformação de coordenadas é realizada pela matriz de transformação T (equação
(2.1)), cuja dedução se encontra no Apêndice I.
δδδ−δ
=kk
kk
sencos
cossenT (2.1)
No diagrama unifilar apresentado na Figura 2.2 é mostrado um gerador síncrono
ligado a uma barra genérica k e conectado à barra m através de uma linha de transmissão de
impedância km km kmZ R jX= +ɺ .
Na Figura 2.2, 'kE , kV e mV são respectivamente, a tensão interna do gerador
síncrono k, a tensão na barra k e a tensão na barra m; kI é a corrente que circula na linha de

CCaappííttuulloo 22
27
transmissão. A grandeza 'dx representa a reatância transitória de eixo direto do gerador. A
potência complexa gerada internamente pelo gerador síncrono, a potência complexa entregue
à barra k e a potência complexa de saída da barra k são respectivamente, k
.
intGS , kGSɺ e kmSɺ .
kV mV
'dx
kG.S km
.S
k m kintGSɺ
'kE
kI
kmZɺ
Figura 2.2: Diagrama Unifilar: Gerador Genérico k
As expressões da potência complexa kGSɺ , decomposta em PGk e QGk (potências ativa e
reativa, respectivamente) são mostradas no conjunto de equações (2.2), na qual k
'qe é a tensão
interna do eixo de quadratura do gerador genérico k.
k k k k k kG G G intG x 'd intG x 'd intG x 'dS P jQ S S (P P ) j(Q Q )= + = − = − + −ɺ ɺ ɺ (2.2)
[ ]k
k k k
k k k
' 2q k k
G intG x 'd k k k k' 'd q d
e V V 1 1P P P sen(δ θ ) sen 2(δ θ )
x 2 x x
= − = − + − −
(2.2.a)
[ ]k k k
k k k k
' 2 2qk k k k
G intG x 'd k k k k' ' 'd d q d
e V V V 1 1Q Q Q cos(δ θ ) 1 cos 2(δ θ )
x x 2 x x
= − = − − − − − −
(2.2.b)
Para a determinação do fluxo de potência nas linhas de transmissão do sistema
multimáquinas, considere o diagrama unifilar mostrado na Figura 2.3, onde kV e mV são os
valores das tensões nas barras k e m, respectivamente. A corrente na linha de transmissão
(representada pela impedância kmkmkm jXRZ +=ɺ ) é kmI .
A potência complexa transferida entre os terminais k e m, denotada por kmSɺ (fluxo de

CCaappííttuulloo 22
28
potência na linha de transmissão que liga as barras k e m), é dada pelo conjunto de equações
(2.3) onde, após manipulações pertinentes, são obtidas as expressões das potências ativa e
reativa transferidas da barra k para a barra m (Pkm e Qkm, respectivamente.).
kmSɺ
kV mV
kmI kmZɺ
k m
Figura 2.3: Diagrama Unifilar: Representação de Duas Barras Genéricas k e m
kmkm k km kmS V (I ) P jQ∗= = +ɺ (2.3)
( ) ( ))mθsen(θVV
Z
X)
mθcos(θVVV
Z
RP kmk2
km
kmkmk
2k2
km
kmkm −+−−=
ɺɺ (2.3.a)
( ) ( ))mθcos(θVV-V
Z
X)
mθsen(θVV
Z
RQ kmk
2k2
km
kmkmk2
km
kmkm −+−−=
ɺɺ (2.3.b)
2.3 Coeficientes dos Geradores
Admitindo-se pequenas variações em torno de um ponto de equilíbrio, a expressão que
representa a injeção de potência ativa na barra de geração (equação (2.2.a)), pode ser
linearizada e expressa como nas equações (2.4).
k
0k
G'q
0k
'q
Gkk
0kk
GG V
V
Pe
e
P)(
)(
PP k
k
kk
k∆
∂∂
+∆
∂∂
+θ−δ∆
θ−δ∂∂
=∆ (2.4)

CCaappííttuulloo 22
29
k
kkk
k
Gkk2k'
dq'd
kkkk
'q
0kk
G1A)(2cosV
x
1
x
1
x
)cos(Ve
)(
P=θ−δ
−+
θ−δ=
θ−δ∂∂
(2.4.a)
k
k
k
G'd
kkk
0k
'q
G 2Ax
)(senV
e
P=
θ−δ=
∂∂
(2.4.b)
k
kkk
kk
Gkkk'dq
'd
kk'q
0k
G 3A)(2senVx
1
x
1
x
)(sene
V
P=θ−δ
−+
θ−δ=
∂ (2.4.c)
As constantes kGA1 ,
kGA2 e kGA3 são chamados de “coeficientes de sensibilidade de
potência ativa dos geradores” no MSP-multimáquinas e se referem aos desvios da potência
ativa entregue à barra terminal k.
Utilizando o conjunto de equações (2.4), os desvios da injeção de potência ativa na
barra de geração são dados pela equação (2.5).
kG'qGkkGG V3Ae2A)(1AP
kkkkk∆+∆+θ−δ∆=∆ (2.5)
De maneira análoga, a linearização da expressão que define a potência reativa (QGk)
(equação (2.2.b)), fornece os desvios da potência reativa gerada como mostrados no conjunto
de equações (2.6).
k
0k
G'q
0k
'q
G
kk
0kk
G
G VV
Qe
e
Q)(
)(
QQ k
k
kk
k∆
∂∂
+∆
∂
∂+θ−δ∆
θ−δ∂∂
=∆ (2.6)
k
kkk
kk
Gkk2k'
dq'd
kkk'q
0kk
G 1R)(2senVx
1
x
1
x
)(senVe
)(
Q=θ−δ
−−
θ−δ−=
θ−δ∂∂
(2.6.a)
k
k
k
G'd
k
0k
'q
G2R
x
)cos(V
e
Q=
θ−δ=
∂
∂ (2.6.b)

CCaappííttuulloo 22
30
[ ]k
kkkk
kk
Gkk'dq
k'd
k'd
kk'q
0k
G3R)(2cos1
x
1
x
1V
x
V2
x
)cos(e
V
Q=θ−δ−
−−−
θ−δ=
∂∂
(2.6.c)
Desta forma, os desvios da potência reativa podem ser escritos como na equação (2.7),
na qual as constantes kGR1 ,
kGR2 , e kGR3 são os “coeficientes de sensibilidade de potência
reativa dos geradores” no MSP-multimáquinas, referindo-se aos desvios da potência reativa
entregue à barra terminal k.
kG'qGkkGG V3Re2R)(1RQ
kkkkk∆+∆+θ−δ∆=∆ (2.7)
2.4 Coeficientes das Linhas de Transmissão
Para pequenos desvios em torno de um ponto de equilíbrio, a equação do fluxo de
potência ativa da barra k para barra m (equação (2.3.a)), pode ser linearizada, assumindo a
forma dada no conjunto de equações (2.8).
m
0m
kmk
0k
kmmk
0mk
kmkm V
V
PV
V
P)(
)(
PP ∆
∆∂∂+∆
∆∂∂+θ−θ∆
θ−θ∂∂=∆ (2.8)
km km kmk m k m k m k m km2 2
k m 0 km km
P R XV V sen( ) V V cos( ) A1
( ) Z Z
∂ = θ − θ − θ − θ = ∂ θ − θ (2.8.a)
km km km kmk m k m m k m km2 2 2
k 0 km km km
P R R X2V V cos( ) V sen( ) A2
V Z Z Z
∂ = − θ − θ − θ − θ = ∂ (2.8.b)
km km kmk k m k k m km2 2
m 0 km km
P R XV cos( ) V sen( ) A3
V Z Z
∂ = − θ − θ − θ − θ = ∂ (2.8.c)
As derivadas parciais da equação (2.8) definem as constantes A1km, A2km, e A3km, que

CCaappííttuulloo 22
31
representam os “coeficientes de sensibilidade de potência ativa das linhas de transmissão” no
MSP-multimáquinas e se referem aos desvios do fluxo de potência ativa entre as barras k e m.
A partir das equações (2.8), os desvios do fluxo de potência ativa na linha de
transmissão entre a barra k e a barra m são dados na equação (2.9).
mkmkkmmkkmkm V3AV2A)(1AP ∆+∆+θ−θ∆=∆ (2.9)
Os desvios do fluxo de potência reativa entre as barras k e m podem ser obtidos
realizando-se um procedimento semelhante ao anterior e com isto, podem ser escritos os
desvios do fluxo de potência reativa (a partir da equação (2.3.b)), como nas equações (2.10).
m
0m
kmk
0k
kmkk
0mk
kmkm V
V
QV
V
Q)(
)(
QQ ∆
∆∂∂
+∆
∆∂∂
+θ−δ∆
θ−θ∂∂
=∆ (2.10)
km km kmk m k m k m k m km2 2
k m 0 km km
Q X RV V sen( ) V V cos( ) R1
( ) Z Z
∂ = − θ − θ − θ − θ = ∂ θ − θ (2.10.a)
km km km kmk m k m m k m km2 2 2
k 0 km km km
Q X X R2V V cos( ) V sen( ) R2
V Z Z Z
∂ = − + θ − θ − θ − θ = ∂
(2.10.b)
km km kmk k m k k m km2 2
m 0 km km
Q X RV cos( ) V sen( ) R3
V Z Z
∂ = θ − θ − θ − θ = ∂ (2.10.c)
As constantes R1km, R2km, e R3km são “coeficientes de sensibilidade de potência
reativa das linhas de transmissão” no MSP-multimáquinas, referentes aos desvios do fluxo de
potência reativa entre as barras k e m.
Com as definições dadas nas equações (2.10), os desvios do fluxo de potência reativa
na linha de transmissão entre a barra k e a barra m são representados como na equação (2.11).
mkmkkmmkkmkm V3RV2R)(1RQ ∆+∆+θ−θ∆=∆ (2.11)

CCaappííttuulloo 22
32
2.5 Equações de Movimento do Gerador Síncrono
Para se relacionar as variações do ângulo interno δk e a velocidade angular do rotor ωk
do gerador síncrono conectado a uma barra genérica k, linearizadas em torno de um ponto de
operação, é utilizada a equação de oscilação (“swing”) do gerador síncrono (KUNDUR, 1994;
ANDERSON ; FOUAD, 2003).
A forma linearizada da equação de oscilação do gerador (equação diferencial de grau
dois), decomposta em duas equações diferenciais de primeira ordem são dadas nas equações
(2.12) e (2.13), nas quais ωo é a velocidade síncrona (377 rad/s), M representa a inércia das
massas girantes e D é o amortecimento inerente do sistema elétrico de potência devido à
presença das cargas.
k0k ω∆ω=δ∆ɺ (2.12)
k k k k k
'k k m k G k k G q G kM ∆ω =∆P -D∆ω -A1 ∆(δ -θ )-A2 ∆e -A3 ∆Vɺ (2.13)
2.6 Circuito de Campo e Sistema de Excitação do Gerador Síncrono
Para a inclusão do circuito de campo do gerador síncrono, considere sua forma
linearizada mostrada nas equações (2.14) (KUNDUR, 1994; ANDERSON ; FOUAD, 2003),
onde kdx é a reatância síncrona de eixo direto,
k
'd0T é a constante de tempo transitória de eixo
direto em circuito aberto do gerador síncrono e kfde é a tensão de campo do gerador síncrono.
k
k k k k k k k
k
d' ' 'd0 q fd q V t A k k'
d
xT e e e K V K ( )
x∆ = ∆ − ∆ + ∆ − ∆ δ − θɺ (2.14)
)cos(x
xxK kk'
d
'dd
V
k
kk
kθ−δ
−= (2.14.a)
CCaappííttuulloo 22
33
)(senVx
xxK kkk'
d
'dd
A
k
kk
kθ−δ
−= (2.14.b)
As constantes kVK e
kAK são denominadas de “coeficientes de reação de armadura do
gerador síncrono k” no MSP-multimáquinas.
Supondo que o regulador automático de tensão – RAT (sistema de excitação) possa ser
representado por um bloco de primeira ordem de ganho Kr e constante de tempo Tr, os desvios
da tensão de campo do gerador síncrono são dados na equação (2.15), na qual ∆Vrefk é a
tensão de referência do regulador de tensão do gerador k.
k
k
k
k
k
k
k
k refr
rk
r
rfd
rfd V
T
KV
T
KE
T
1E ∆+∆−∆−=∆ ɺ (2.15)
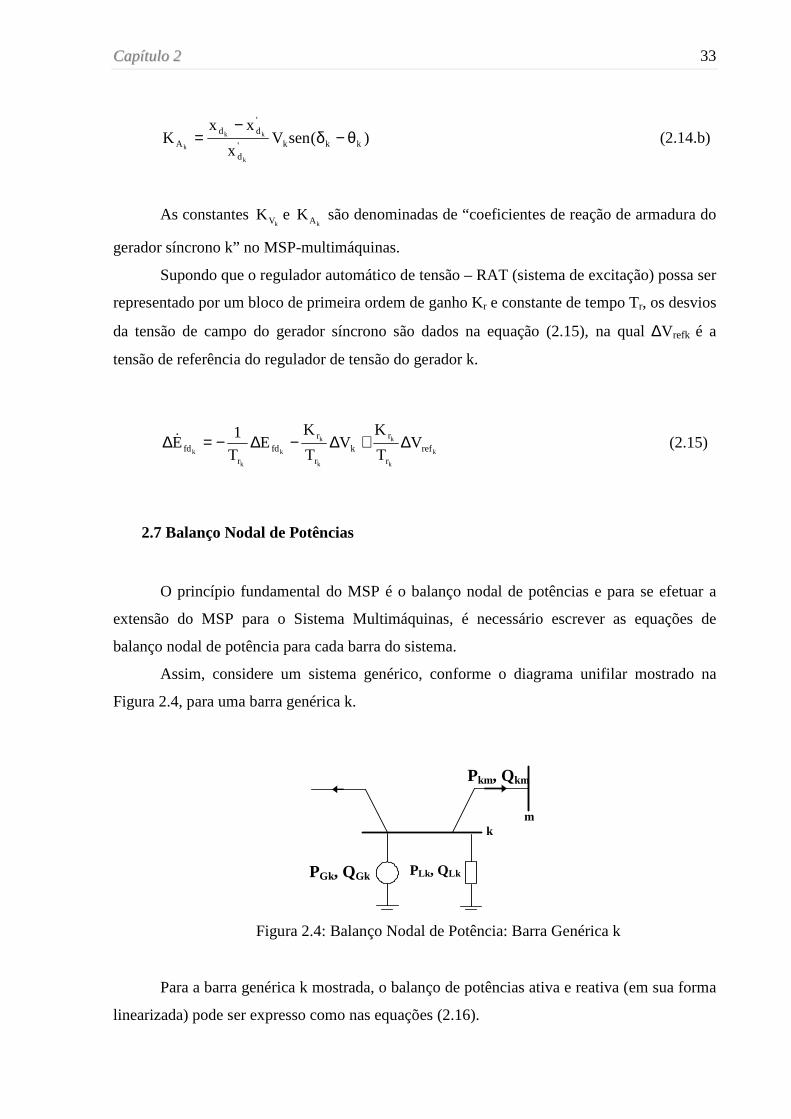
2.7 Balanço Nodal de Potências
O princípio fundamental do MSP é o balanço nodal de potências e para se efetuar a
extensão do MSP para o Sistema Multimáquinas, é necessário escrever as equações de
balanço nodal de potência para cada barra do sistema.
Assim, considere um sistema genérico, conforme o diagrama unifilar mostrado na
Figura 2.4, para uma barra genérica k.
k m
Pkm, Qkm
PGk, QGk PLk , QLk
Figura 2.4: Balanço Nodal de Potência: Barra Genérica k
Para a barra genérica k mostrada, o balanço de potências ativa e reativa (em sua forma
linearizada) pode ser expresso como nas equações (2.16).

CCaappííttuulloo 22
34
∑
∑
Ω∈
Ω∈
=∆−∆−∆
=∆−∆−∆
k
k
mkmLkGk
mkmLkGk
0QQQ
0PPP
(2.16)
Nas equações (2.16), ∆Pkm e ∆Qkm são as variações dos fluxos de potência ativa e
reativa na ligação k-m, ∆PGk e ∆QGk são as variações das potências ativa e reativa geradas no
nó k, ∆PLk e ∆QLk são as variações das potências ativa e reativa de uma possível carga
conectada a barra k e Ωk é o conjunto de barras ligadas à barra k.
A substituição das equações (2.5), (2.7), (2.9) e (2.11) nas equações (2.16), fornecem
as equações que representam o balanço nodal de potências ativa e reativa na barra genérica k
(equações (2.17)).
∑
∑
Ω∈
Ω∈
=∆+∆+θ−θ∆−∆−∆+∆+θ−δ∆
=∆+∆+θ−θ∆−∆−∆+∆+θ−δ∆
k
kkkk
k
kkkk
mmkmkkmmkkmLkkG
'qGkkG
mmkmkkmmkkmLkkG
'qGkkG
0]V3RV2R)(1R[QV3Re2R)(1R
0)]V3AV2A)(1A[PV3Ae2A)(1A
(2.17)
2.8 Representação do MSP-multimáquinas no Domínio do Tempo
Um sistema de potência constituído por “ng” geradores e “nb” barras, onde cada
gerador está equipado com um RAT descrito por um bloco de primeira ordem, pode ser
representado pelo MSP-multimáquinas no domínio do tempo por um conjunto de equações
diferenciais e algébricas.
Com estas considerações, o MSP-multimáquinas assume a forma mostrada nas
equações (2.18), onde ∆x é o vetor das variáveis de estado, ∆z o vetor das variáveis algébricas
e ∆u é o vetor das entradas do sistema elétrico de potência (DECKMANN ; DA COSTA,
1994; FURINI, 2008).

CCaappííttuulloo 22
35
uB
B
z
x
JJ
JJ
0
x
2
1
2221
1211 ∆
+
∆∆
=
∆ɺ (2.18)
1 ng 1 ng
t' '
1 ng 1 ng q . q fd fdx [ ... ] [ ... ] [ e ... e ] [ e ... e ] ∆ = ∆ω ∆ω ∆δ ∆δ ∆ ∆ ∆ ∆ (2.18.a)
[ ] t1 nb 1 nbz [ ... ] [ V ... V ]∆ = ∆θ ∆θ ∆ ∆ (2.18.b)
ng ng nb nb
t
m1 m ref1 ref L1 L L1 L∆u= [∆ P ...∆P ] [∆ V ...∆V ] [∆ P ...∆P ] [∆ Q ...∆Q ] (2.18.c)
Para a formação das submatrizes, J11, J12, J21, J22, B1 e B2, considere as definições
dadas no conjunto de equações (2.19) onde os parâmetros do gerador síncrono e os
coeficientes do modelo de sensibilidade de potência são agrupados na forma matricial.
[ ]
=
ngD0
D0
00D
D2
1
⋱⋮
⋯
(2.19.a)
[ ]
=
ngM0
M0
00M
M2
1
⋱⋮
⋯
(2.19.b)
[ ]
ngxngo
o
o
o
0
0
00
ω
ωω
=ω⋱⋮
⋯
(2.19.c)
CCaappííttuulloo 22
36
[ ]
′
′′
=′
dngx0
x0
00x
x2d
1d
d ⋱⋮
⋯
(2.19.d)
[ ]
′
′′
=′
dongT0
T0
00T
T2do
1do
do ⋱⋮
⋯
(2.19.e)
[ ]
=
dngx0
x0
00x
x2d
1d
d ⋱⋮
⋯
(2.19.f)
[ ]
=
AngK0
K0
00K
K2A
1A
A⋱⋮
⋯
(2.19.g)
[ ]
=
VngK0
K0
00K
K2V
1V
V⋱⋮
⋯
(2.19.h)
[ ]
=
Gng1A0
1A0
001A
1A2G
1G
G⋱⋮
⋯
(2.19.i)
CCaappííttuulloo 22
37
[ ]
=
Gng2A0
2A0
002A
2A2G
1G
G⋱⋮
⋯
(2.19.j)
[ ]
=
Gng3A0
3A0
003A
3A2G
1G
G⋱⋮
⋯
(2.19.k)
[ ]
=
Gng1R0
1R0
001R
1R2G
1G
G⋱⋮
⋯
(2.19.l)
[ ]
=
Gng2R0
2R0
002R
2R2G
1G
G⋱⋮
⋯
(2.19.m)
[ ]
=
Gng3R0
3R0
003R
3R2G
1G
G⋱⋮
⋯
(2.19.n)
Com estas notações as submatrizes J11, J12, J21, J22, B1 e B2 ficam definidas no
conjunto de equações (2.20).
CCaappííttuulloo 22
38
[ ] [ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ][ ] [ ] [ ] [ ]
1 1 1
G G ng x ng
0 ng x ng ng x ng ng x ng
1 1 1 111 ' ' ' 'd0 A d0 d d d0ng x ng
1
rng x ng ng x ng ng x ng
M D M A1 M A2 0
0 0 0J
0 T k T x x T
0 0 0 T
− − −
− − − −
−
− − − ω = − −
(2.20.a)
[ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ][ ] [ ]
1 1
G Gng x nb ng ng x nb ng
ng x ng ng x nb ng ng x ng ng x nb ng
121 1' '
d0 A d0 Vng x nb ng ng x nb ng
1
r rng x ng ng x nb ng ng x nb ng
M A1 0 M A3 0
0 0 0 0
J
T K 0 T K 0
0 0 K T 0
− −
− −
− −
− −
− −
−
− −
− = −
⋮
⋮
⋯ ⋯ ⋮ ⋯ ⋯
⋮
⋮
(2.20.b)
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
=
−−−−
−−−−
ngxngnbngxngnbngxngnbngxngnb
ngxngGGngxng
ngxngnbngxngnbngxngnbngxngnb
ngxngGGngxng
21
0000
02R1R0
0000
02A1A0
J ⋯⋯⋯⋯ (2.20.c)
[ ] [ ]
[ ] [ ]
=
43
21
22
22J22J
22J22J
J ⋯⋯ (2.20.d)
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ][ ] [ ] [ ]
=
−
−
nbxngnbxng1
rrngxng
nbxngnbxngngxngngxng
nbxngnbxngngxngngxng
nbxngnbxngngxng1
1
00TK0
0000
0000
000M
B (2.20.e)
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ]
−
−=
nbxnbnbxnbngxnbngxnb
nbxnbnbxnbngxnbngxnb
2
)1(diag000
0)1(diag00
B ⋯⋯⋯⋯ (2.20.f)
As submatrizes J221, J222, J223 e J224 são definidas nas equações (2.21).
CCaappííttuulloo 22
39
[ ]
=
−−==
∑≠
km1km
mkkmGk1kk
1
A1J22
A1A1J22J22 (2.21.a)
[ ]
−=
−==
∑≠
km2km
mkkmGk2kk
2
A3J22
A2A3J22J22 (2.21.b)
[ ] 3kk Gk kmk m
3
3km km
J22 R1 R1J22
J22 R1≠
= − −= =
∑ (2.21.c)
[ ] 4kk Gk kmk m
4
4km km
J22 R3 R2J22
J22 R3≠
= −= = −
∑ (2.21.d)
A eliminação das variáveis algébricas na equação (2.18) fornece uma representação no
espaço de estados do MSP-multimáquinas que assume a forma mostrada nas equações (2.22).
uBxAx ∆+∆=∆ɺ (2.22)
( )-111 12 22 21A= J -J J J (2.22.a)
( )21
22121 BJJBB −−= (2.22.b)
Nas equações (2.22), A é a matriz de estados e B a matriz de entrada, relacionada com
a controlabilidade do Sistema de Potência Multimáquinas.
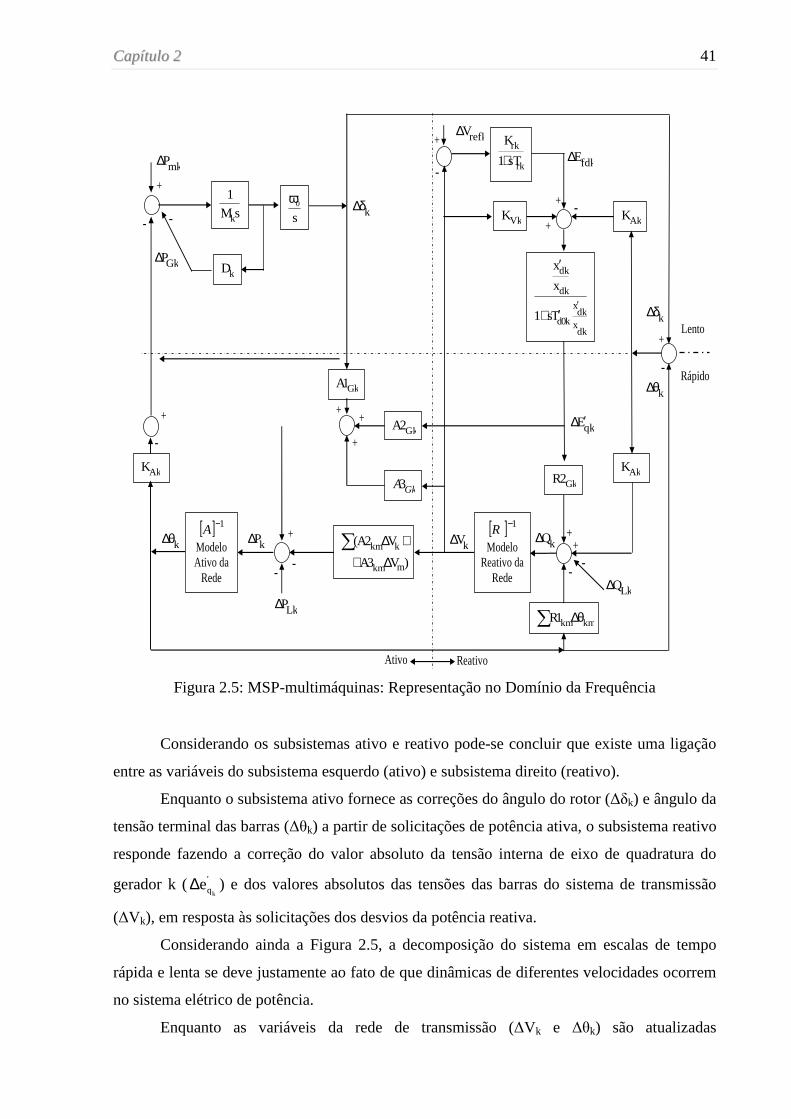
2.9 Representação do MSP-multimáquinas no Domínio da Frequência
A aplicação da transformada de Laplace no conjunto de equações (2.18) permite
representar o MSP-multimáquinas no domínio na frequência, como mostrado na Figura 2.5.
No diagrama de blocos apresentado na Figura 2.5 pode-se observar que uma das

CCaappííttuulloo 22
40
vantagens inerentes ao MSP se deve justamente ao fato de “se ter acesso” às variáveis
algébricas de todas as barras do sistema elétrico (∆Vk e ∆θk). Dito de outra forma, o MSP-
multimáquinas preserva o sistema externo de transmissão. Este fato não ocorre com o modelo
de Heffron e Phillips generalizado para sistemas de potência multimáquinas (MOUSSA ; YU,
1974; MARTINS ; LIMA, 1990; MOTA ; NASCIMENTO, 2008).
A importância desta característica é que ela permite que alguma variável algébrica
possa ser utilizada como entrada de algum controlador que por ventura possa ser adicionado
ao sistema elétrico de potência.
Outra característica inerente que pode ser observada é a decomposição do sistema
elétrico de potência em quatro subsistemas, sendo eles os subsistemas, ativo e reativo
(delimitados pela linha vertical) e subsistemas, rápido e lento (separados pela linha horizontal)
(DA COSTA, 1992; DECKMANN ; DA COSTA, 1994; FURINI, 2008; PEREIRA, 2009).
CCaappííttuulloo 22
41
dkxdk
x
k0d
dk
dk
Ts1
x
x
′′+
′
rk
rk
sT1
K
+
kmkm1R θ∆∑
Gk2R AkK AkK
sM
1
k
kD
s0ω
Gk1A
[ ] 1−R Modelo
Reativo da Rede
[ ] 1−A Modelo Ativo da
Rede
VkK
Gk2A
GkA3
)V3A
V2A(
mkm
kkm
∆+
+∆∑
AkK
+
+ + +
+
+
+
+
+
+
+ +
- -
-
-
-
-
- -
mkP∆
refkV∆
fdkE∆
qkE′∆
kδ∆
kθ∆
GkP∆
kV∆ kQ∆ kP∆ kθ∆
kδ∆
Ativo Reativo
Lento
Rápido
LkP∆
- LkQ∆
-
Figura 2.5: MSP-multimáquinas: Representação no Domínio da Frequência
Considerando os subsistemas ativo e reativo pode-se concluir que existe uma ligação
entre as variáveis do subsistema esquerdo (ativo) e subsistema direito (reativo).
Enquanto o subsistema ativo fornece as correções do ângulo do rotor (∆δk) e ângulo da
tensão terminal das barras (∆θk) a partir de solicitações de potência ativa, o subsistema reativo
responde fazendo a correção do valor absoluto da tensão interna de eixo de quadratura do
gerador k (k
'qe∆ ) e dos valores absolutos das tensões das barras do sistema de transmissão
(∆Vk), em resposta às solicitações dos desvios da potência reativa.
Considerando ainda a Figura 2.5, a decomposição do sistema em escalas de tempo
rápida e lenta se deve justamente ao fato de que dinâmicas de diferentes velocidades ocorrem
no sistema elétrico de potência.
Enquanto as variáveis da rede de transmissão (∆Vk e ∆θk) são atualizadas
CCaappííttuulloo 22
42
instantaneamente pelo sistema algébrico, as variáveis da máquina síncrona (∆δk e k
'qe∆ ) são
atualizadas lentamente pelo sistema diferencial.
Ainda com relação à Figura 2.5 é possível observar as matrizes de sensibilidade de
potência ([A]) e ([R]) (equação (2.23)) que correspondem à extensão das equações de balanço
nodal para o MSP–multimáquinas. Estas matrizes são similares estruturalmente à matriz
admitância de barra do sistema elétrico de potência utilizada no cálculo do fluxo de potência
pelo método de Newton – Raphson.
[ ] [ ] [ ]
[ ] [ ] [ ]kkkk
kkkk
V.RQ
.AP
x
x
∆=∆
θ∆=∆
(2.23)
2.10 Conclusões
Neste capítulo foi apresentado o Modelo de Sensibilidade de Potência expandido para
o ambiente multimáquinas (MSP-multimáquinas). Como o objetivo deste trabalho é o estudo
da estabilidade a pequenas perturbações (estabilidade dinâmica), após a dedução do MSP, o
comportamento mecânico e elétrico do sistema elétrico de potência ficou descrito por
equações diferenciais e equações algébricas lineares.
O MSP apresenta como principal característica a preservação do sistema de
transmissão externo, isto é, as barras do sistema elétrico são mantidas na modelagem, o que
facilita a inclusão de novos dispositivos (como os FACTS) no modelo do sistema elétrico de
potência. Além disso, como ficam disponíveis as variáveis algébricas do sistema de
transmissão (módulo e fase das tensões nas barras (∆Vk e ∆θk)), estas grandezas podem ser
utilizadas como sinal de entrada para algum controlador, quando houver interesse.
Após o desenvolvimento do modelo matemático, o MSP-multimáquinas foi
representado no domínio do tempo, no qual o sistema elétrico de potência ficou representado
por equações diferenciais (que definem as variáveis de estado) e equações algébricas (que
definem as variáveis algébricas).
A representação no domínio da frequência também foi realizada e mostrou uma
característica intrínseca deste modelo que é a separação do sistema global em quatro
subsistemas distintos: subsistemas lento e rápido (relativo à separação entre as variáveis de
CCaappííttuulloo 22
43
estado e algébricas, respectivamente) e subsistemas, ativo e reativo (referentes à separação
entre potências ativa e reativa).
Nos capítulos seguintes o MSP-multimáquinas será modificado para a inserção de
modelos do dispositivo FACTS STATCOM com a finalidade de se estudar a influência deste
controlador na estabilidade a pequenas perturbações de sistemas elétricos de potência.

CCaappííttuulloo 33
44
Capítulo 3
Modelos do Dispositivo FACTS STATCOM
3.1 Introdução
Este capítulo se destina a relatar o estudo e dedução de dois modelos para o
dispositivo FACTS STATCOM, que poderá ser utilizado no estudo da estabilidade a
pequenas perturbações de sistemas elétricos de potência multimáquinas. Estas modelagens
serão após acopladas às equações do MSP-multimáquinas deduzidas no Capítulo 2, resultando
em um MSP-multimáquinas modificado que representará o sistema elétrico de potência com
dispositivos FACTS do tipo STATCOM em operação.
O primeiro modelo a ser apresentado é o aqui chamado de “modelo simplificado”
onde o dispositivo é representado por uma fonte de corrente em derivação com a linha de
transmissão. Também será apresentado um modelo dito “detalhado”, que permitirá observar
outras possibilidades de atuação do dispositivo e, desta forma, apresentá-lo como um
controlador mais robusto, versátil e completo.
Além dessas modelagens, serão abordados seu princípio de funcionamento e sua
influência na estabilidade a pequenas perturbações.
3.2 Configuração Básica e Princípio de Funcionamento do STACOM
De maneira geral, os compensadores estáticos de reativos são responsáveis pela
geração ou absorção de potência reativa controlável por chaveamento sincronizado de
capacitores ou reatores. Na prática, estes dispositivos funcionam como uma impedância shunt
que pode ser ajustada de acordo com a necessidade de compensação da rede de transmissão.
Com os avanços da eletrônica de potência tornou-se possível o desenvolvimento de
dispositivos que geram reativos sem a necessidade de chaveamento de bancos de reatores.
Para isso foram utilizados conversores fonte de tensão (VSC-Voltage Source Converter)
(GYUGYI,1994) que, através de tiristores GTO (Gate Turn-Off), convertem uma tensão CC
de entrada fornecida pelo capacitor em uma tensão trifásica senoidal CA de saída, na mesma
CCaappííttuulloo 33
45
frequência fundamental do sistema. Esses conversores são operados como fontes de tensão e
corrente e produzem reativos sem a necessidade de componentes de armazenamento de
energia através da circulação de corrente alternada entre as fases do sistema elétrico (CIGRÉ
TASK FORCE, 1999; PEREIRA, 2009).
Funcionalmente, a partir do ponto de vista da geração de potência reativa, a operação
destes sistemas é similar a uma máquina síncrona ideal cuja saída de potência ativa é variada
por um controle de excitação (PEREIRA, 2009). Devido à similaridade de funcionamento
com o gerador síncrono rotativo, esses dispositivos também são conhecidos como Geradores
Estáticos Síncronos (SSG-Static Synchronous Generators). Estes geradores estáticos podem
ser operados sem uma fonte de energia e com controle apropriado para funcionarem como um
compensador shunt de reativos. Em vista disto, por analogia, também são chamados de
Compensadores Estáticos Síncronos, (STATCOM; STATCON) – Static Synchronous
Compensator (Condenser) (HINGORANI ; GYUGYI, 2000). Quando a operação deste
dispositivo é feita de forma integrada com uma fonte de tensão do lado CC, é possível
compensar tanto a potência ativa como a potência reativa.
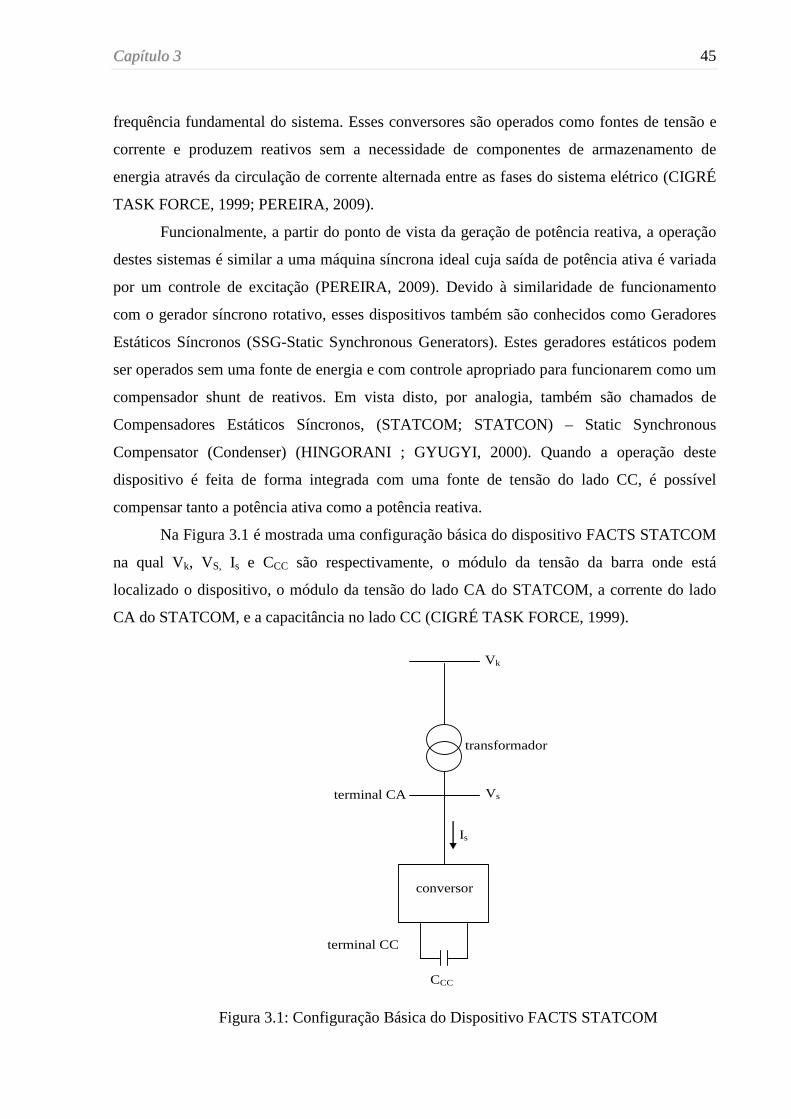
Na Figura 3.1 é mostrada uma configuração básica do dispositivo FACTS STATCOM
na qual Vk, VS, Is e CCC são respectivamente, o módulo da tensão da barra onde está
localizado o dispositivo, o módulo da tensão do lado CA do STATCOM, a corrente do lado
CA do STATCOM, e a capacitância no lado CC (CIGRÉ TASK FORCE, 1999).
Vk
Vs
Is
conversor
CCC
transformador
terminal CA
terminal CC
Figura 3.1: Configuração Básica do Dispositivo FACTS STATCOM
CCaappííttuulloo 33
46
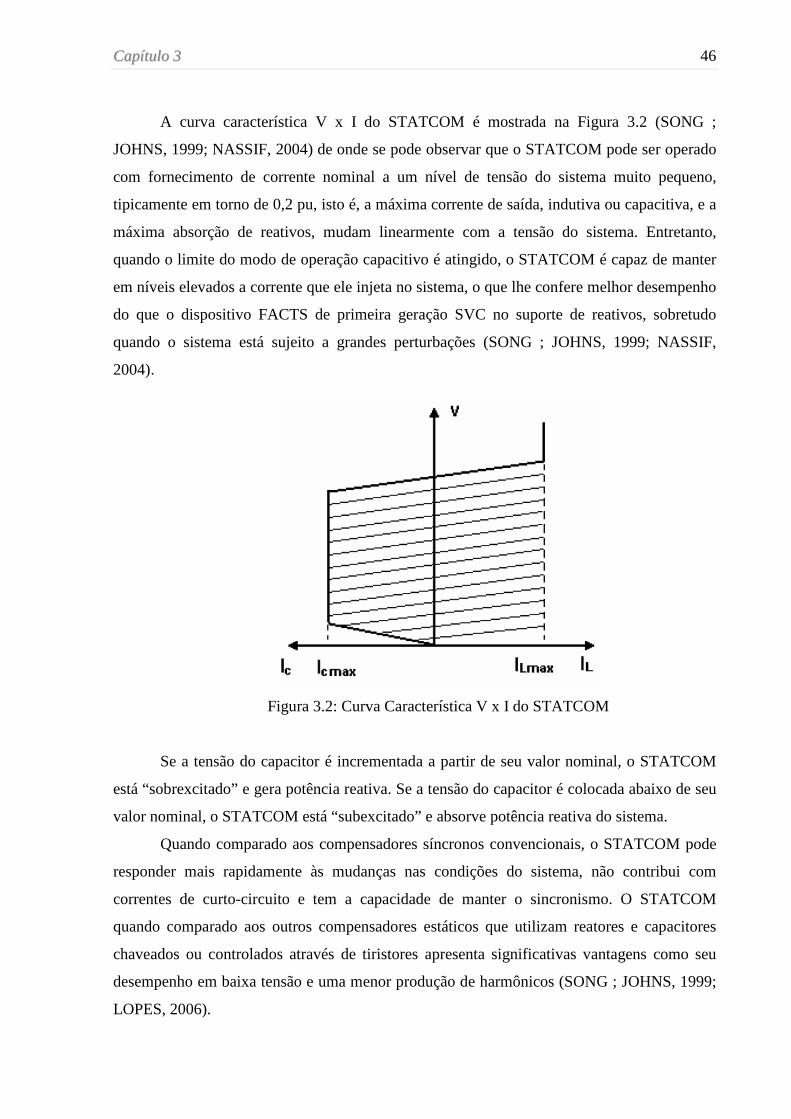
A curva característica V x I do STATCOM é mostrada na Figura 3.2 (SONG ;
JOHNS, 1999; NASSIF, 2004) de onde se pode observar que o STATCOM pode ser operado
com fornecimento de corrente nominal a um nível de tensão do sistema muito pequeno,
tipicamente em torno de 0,2 pu, isto é, a máxima corrente de saída, indutiva ou capacitiva, e a
máxima absorção de reativos, mudam linearmente com a tensão do sistema. Entretanto,
quando o limite do modo de operação capacitivo é atingido, o STATCOM é capaz de manter
em níveis elevados a corrente que ele injeta no sistema, o que lhe confere melhor desempenho
do que o dispositivo FACTS de primeira geração SVC no suporte de reativos, sobretudo
quando o sistema está sujeito a grandes perturbações (SONG ; JOHNS, 1999; NASSIF,
2004).
Figura 3.2: Curva Característica V x I do STATCOM
Se a tensão do capacitor é incrementada a partir de seu valor nominal, o STATCOM
está “sobrexcitado” e gera potência reativa. Se a tensão do capacitor é colocada abaixo de seu
valor nominal, o STATCOM está “subexcitado” e absorve potência reativa do sistema.
Quando comparado aos compensadores síncronos convencionais, o STATCOM pode
responder mais rapidamente às mudanças nas condições do sistema, não contribui com
correntes de curto-circuito e tem a capacidade de manter o sincronismo. O STATCOM
quando comparado aos outros compensadores estáticos que utilizam reatores e capacitores
chaveados ou controlados através de tiristores apresenta significativas vantagens como seu
desempenho em baixa tensão e uma menor produção de harmônicos (SONG ; JOHNS, 1999;
LOPES, 2006).

CCaappííttuulloo 33
47
3.3 Modelo Dinâmico Simplificado do Dispositivo FACTS STATCOM
Na dedução de um modelo simplificado típico do dispositivo STATCOM para o
estudo da estabilidade a pequenas perturbações será considerada apenas a troca de potência
reativa com o sistema elétrico. Desta forma, o STATCOM será representado como uma fonte
de corrente controlável, acoplada em derivação a uma barra genérica “s” do sistema elétrico
de potência, conforme o diagrama mostrado na Figura 3.3 (CIGRÉ TASK FORCE, 1999;
SONG ; JOHNS, 1999; NASSIF, 2004; HINGORANI ; GYUGYI, 2000; PEREIRA, 2009).
O princípio básico de geração de potência reativa por um conversor fonte de tensão é
similar ao de uma máquina síncrona rotativa convencional. Variando a tensão de saída, pode-
se controlar a potência reativa de maneira similar ao do condensador síncrono rotativo. Se a
amplitude da tensão de saída for aumentada de forma a superar a tensão do sistema, o
conversor gera potência reativa; se for diminuída abaixo da tensão do sistema, o conversor
absorve potência reativa; se for igual, não haverá fluxo de potência reativa (NASSIF, 2004;
PEREIRA, 2009).
Vs
Is
Qs
Figura 3.3: Representação Simplificada do Dispositivo FACTS STATCOM
Com esta consideração, a expressão da potência reativa Qs trocada com o sistema
elétrico é mostrada na equação (3.1) onde Is é a corrente fornecida ou absorvida pelo
STATCOM do sistema elétrico de potência e Vs o módulo da tensão da barra onde está
localizado o dispositivo (CHUN et al., 1998; NASSIF, 2004; NASSIF et al., 2004; ABIDO,
2005; PEREIRA, 2009).
Sks IVQ = (3.1)

CCaappííttuulloo 33
48
Admitindo-se pequenas variações em torno de um ponto de equilíbrio estável, a
equação (3.1) pode ser linearizada, resultando na equação (3.2), que representa o modelo
simplificado do STATCOM.
Skkss IVVIQ ∆+∆=∆ (3.2)
As variações ∆Is e ∆Vs são fornecidas por algum dispositivo de controle acoplado ao
STATCOM como, por exemplo, o controlador mostrado na Figura 3.4.
c
c
K
1 sT+
S∆ I sref V∆
–
+ +
SK
PK
SV∆
y∆
Figura 3.4: Modelo do Controlador Simplificado do Dispositivo FACTS STATCOM
Na Figura 3.4 o controlador é representado por um bloco de primeira ordem
(composto por um ganho estático Kc e constante de tempo Tc) para expressar o
comportamento dinâmico da variável de controle IS. Alem disso, os ganhos KS e KP modulam
os sinais de entrada do controlador (∆Vs e ∆y).
O sinal ∆Vsref são as variações da tensão de referência da barra onde está conectado o
dispositivo FACTS STATCOM. O sinal ∆y é um sinal de entrada para o controlador e, neste
trabalho, será utilizado o fluxo de potência ativa em uma linha de transmissão próxima da
barra onde está instalado o dispositivo.
A justificativa para a escolha deste sinal de entrada é que os modos de oscilação
interárea possuem alta observabilidade neste sinal (YANG et al., 1998). Além disso, trata-se
de um sinal disponível localmente.
Sendo assim, o sinal ∆y é dado pela equação (2.9) deduzida no capítulo 2 e, para
facilidade de compreensão, é repetida na equação (3.3).
mkmkkmmkkmkm V3AV2A)(1AP ∆+∆+θ−θ∆=∆ (3.3)
CCaappííttuulloo 33
49
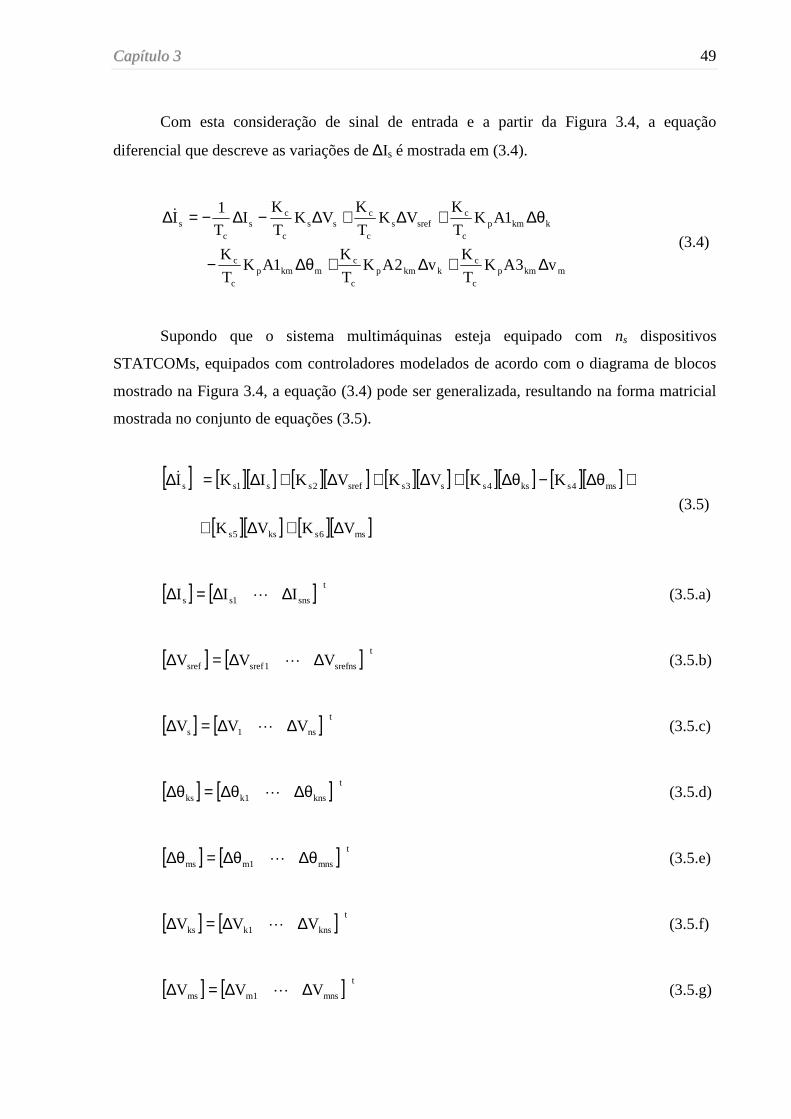
Com esta consideração de sinal de entrada e a partir da Figura 3.4, a equação
diferencial que descreve as variações de ∆Is é mostrada em (3.4).
mkmpc
ckkmp
c
cmkmp
c
c
kkmpc
csrefs
c
css
c
cs
cs
v3AKT
Kv2AK
T
K1AK
T
K
1AKT
KVK
T
KVK
T
KI
T
1I
∆+∆+θ∆−
θ∆+∆+∆−∆−=∆ɺ
(3.4)
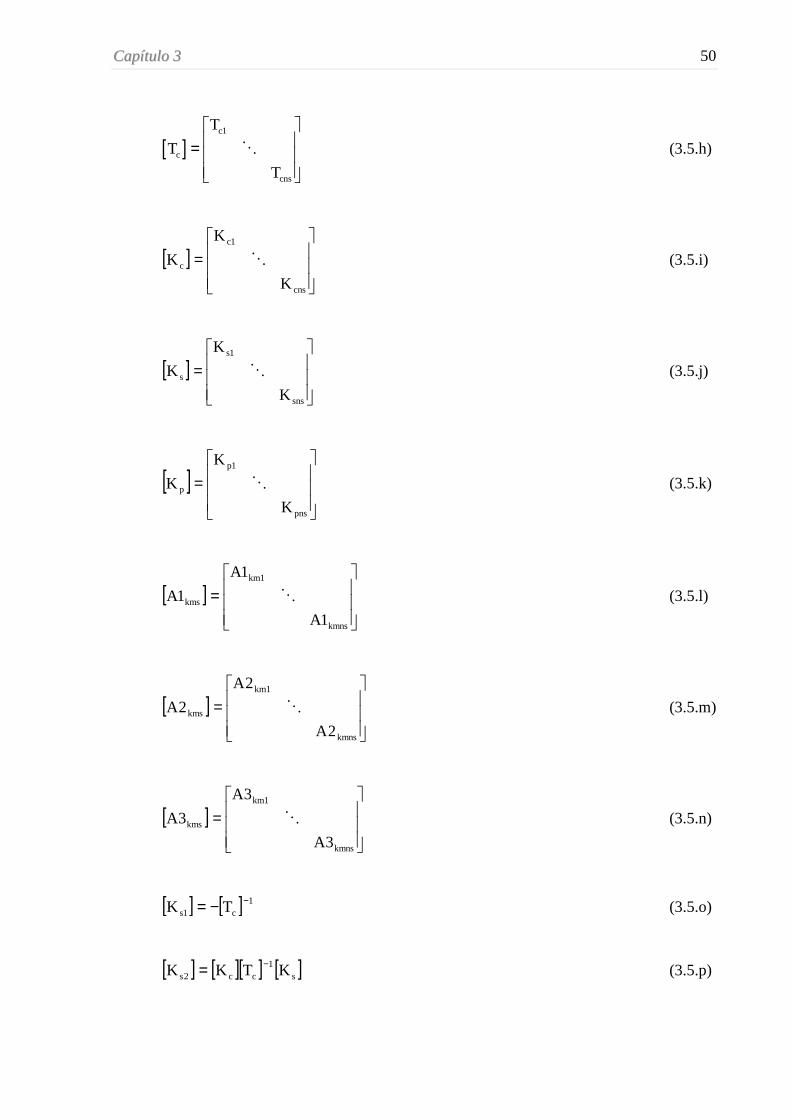
Supondo que o sistema multimáquinas esteja equipado com ns dispositivos
STATCOMs, equipados com controladores modelados de acordo com o diagrama de blocos
mostrado na Figura 3.4, a equação (3.4) pode ser generalizada, resultando na forma matricial
mostrada no conjunto de equações (3.5).
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ]
[ ][ ] [ ][ ]ms6sks5s
ms4sks4ss3ssref2ss1ss
VKVK
KKVKVKIKI
∆+∆+
+θ∆−θ∆+∆+∆+∆=∆ɺ
(3.5)
[ ] [ ] t
sns1ss III ∆∆=∆ ⋯ (3.5.a)
[ ] [ ] t
srefns1srefsref VVV ∆∆=∆ ⋯ (3.5.b)
[ ] [ ] t
ns1s VVV ∆∆=∆ ⋯ (3.5.c)
[ ] [ ] t
kns1kks θ∆θ∆=θ∆ ⋯ (3.5.d)
[ ] [ ] t
mns1mms θ∆θ∆=θ∆ ⋯ (3.5.e)
[ ] [ ] t
kns1kks VVV ∆∆=∆ ⋯ (3.5.f)
[ ] [ ] t
mns1mms VVV ∆∆=∆ ⋯ (3.5.g)
CCaappííttuulloo 33
50
[ ]c1
c
cns
T
T
T
=
⋱ (3.5.h)
[ ]
=
cns
1c
c
K
K
K ⋱ (3.5.i)
[ ]
=
sns
1s
s
K
K
K ⋱ (3.5.j)
[ ]
=
pns
1p
p
K
K
K ⋱ (3.5.k)
[ ]
=
kmns
1km
kms
1A
1A
1A ⋱ (3.5.l)
[ ]
=
kmns
1km
kms
2A
2A
2A ⋱ (3.5.m)
[ ]
=
kmns
1km
kms
3A
3A
3A ⋱ (3.5.n)
[ ] [ ] 1c1s TK −−= (3.5.o)
[ ] [ ][ ] [ ]s1
cc2s KTKK −= (3.5.p)
CCaappííttuulloo 33
51
[ ] [ ][ ] [ ] [ ]2ss1
cc3s KKTKK −=−= − (3.5.q)
[ ] [ ][ ] [ ][ ]kmsp1
cc4s 1AKTKK −= (3.5.r)
[ ] [ ][ ] [ ][ ]kmsp1
cc5s 2AKTKK −= (3.5.s)
[ ] [ ][ ] [ ][ ]kmsp1
cc6s 3AKTKK −= (3.5.t)
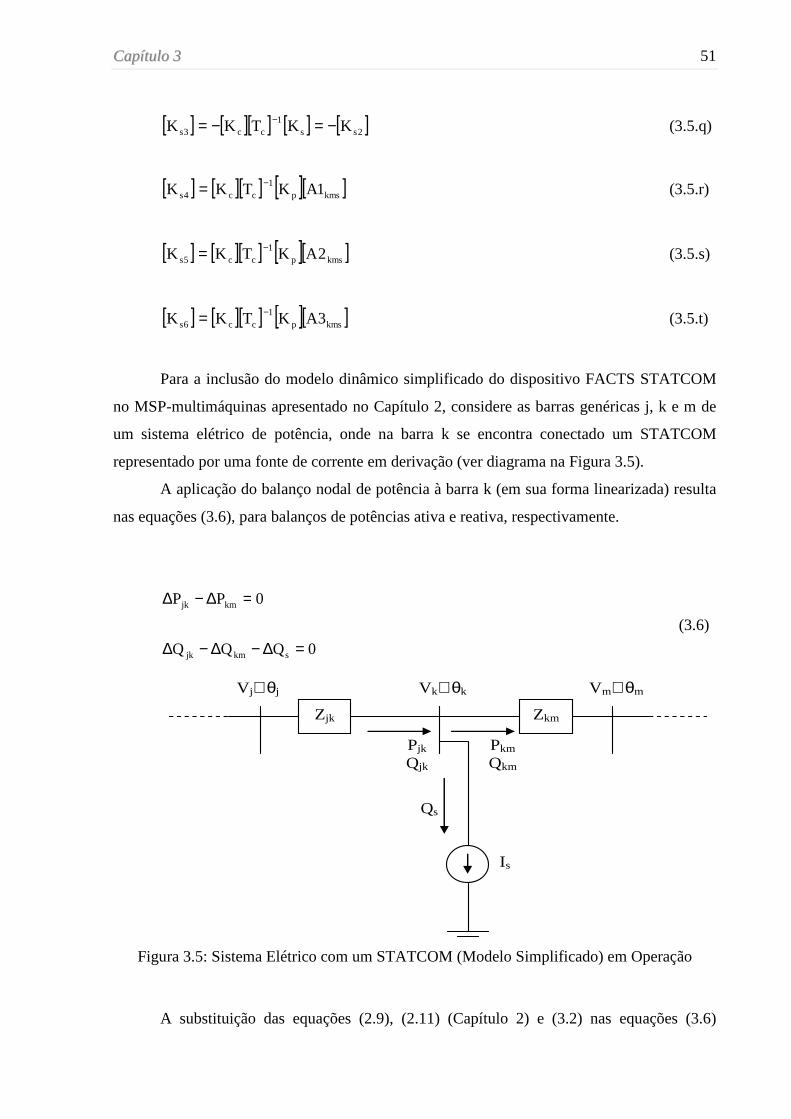
Para a inclusão do modelo dinâmico simplificado do dispositivo FACTS STATCOM
no MSP-multimáquinas apresentado no Capítulo 2, considere as barras genéricas j, k e m de
um sistema elétrico de potência, onde na barra k se encontra conectado um STATCOM
representado por uma fonte de corrente em derivação (ver diagrama na Figura 3.5).
A aplicação do balanço nodal de potência à barra k (em sua forma linearizada) resulta
nas equações (3.6), para balanços de potências ativa e reativa, respectivamente.
0QQQ
0PP
skmjk
kmjk
=∆−∆−∆
=∆−∆
(3.6)
Vk∠θk
Is
Qs
Zkm Zjk
Vm∠θm V j∠θj
Pkm
Qkm
Pjk
Qjk
Figura 3.5: Sistema Elétrico com um STATCOM (Modelo Simplificado) em Operação
A substituição das equações (2.9), (2.11) (Capítulo 2) e (3.2) nas equações (3.6)
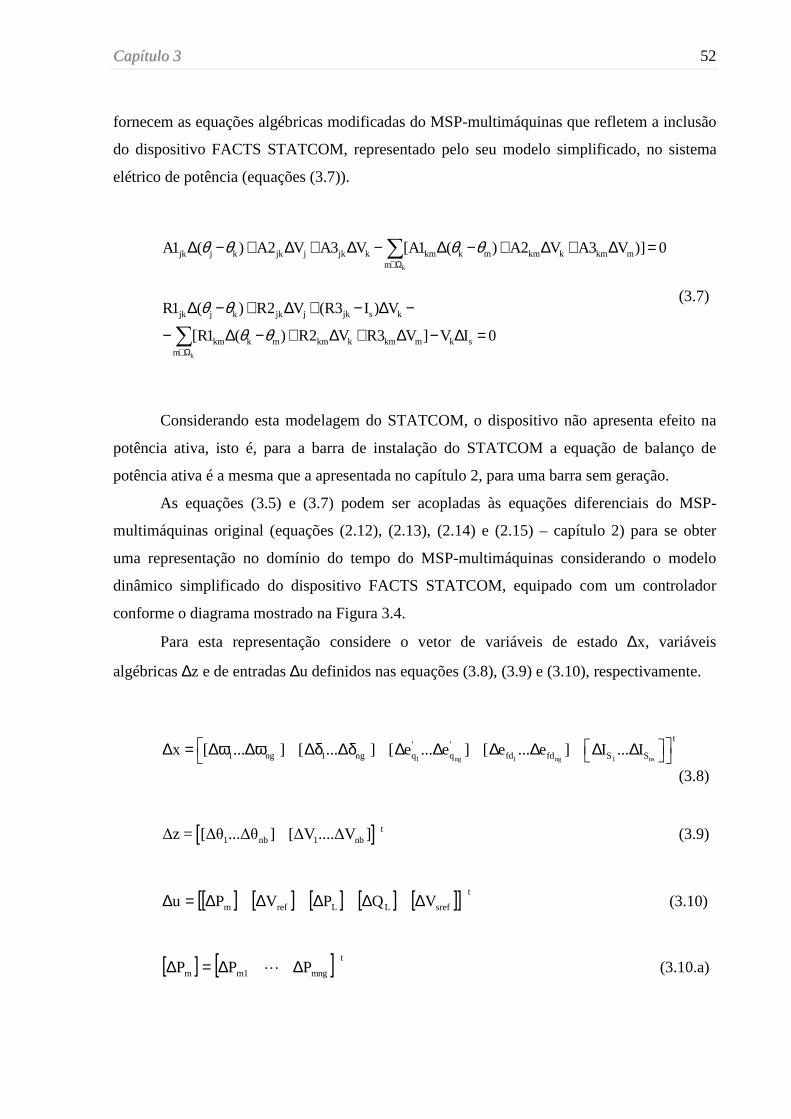
CCaappííttuulloo 33
52
fornecem as equações algébricas modificadas do MSP-multimáquinas que refletem a inclusão
do dispositivo FACTS STATCOM, representado pelo seu modelo simplificado, no sistema
elétrico de potência (equações (3.7)).
∑
∑
Ω∈
Ω∈
=∆−∆+∆+−∆−
−∆−+∆+−∆
=∆+∆+−∆−∆+∆+−∆
k
k
mskmkmkkmmkkm
ksjkjjkkjjk
mmkmkkmmkkmkjkjjkkjjk
0IV]V3RV2R)(1R[
V)I3R(V2R)(1R
0)]V3AV2A)(1A[V3AV2A)(1A
θθ
θθ
θθθθ
(3.7)
Considerando esta modelagem do STATCOM, o dispositivo não apresenta efeito na
potência ativa, isto é, para a barra de instalação do STATCOM a equação de balanço de
potência ativa é a mesma que a apresentada no capítulo 2, para uma barra sem geração.
As equações (3.5) e (3.7) podem ser acopladas às equações diferenciais do MSP-
multimáquinas original (equações (2.12), (2.13), (2.14) e (2.15) – capítulo 2) para se obter
uma representação no domínio do tempo do MSP-multimáquinas considerando o modelo
dinâmico simplificado do dispositivo FACTS STATCOM, equipado com um controlador
conforme o diagrama mostrado na Figura 3.4.
Para esta representação considere o vetor de variáveis de estado ∆x, variáveis
algébricas ∆z e de entradas ∆u definidos nas equações (3.8), (3.9) e (3.10), respectivamente.
1 ng 1 ng 1 ns
t' '
1 ng 1 ng q q fd fd S Sx [ ... ] [ ... ] [ e ... e ] [ e ... e ] I ... I ∆ = ∆ω ∆ω ∆δ ∆δ ∆ ∆ ∆ ∆ ∆ ∆ (3.8)
[ ] t1 nb 1 nb∆z = [∆θ ...∆θ ] [∆V ....∆V ] (3.9)
[ ] [ ] [ ] [ ] [ ][ ] t
srefLLrefm VQPVPu ∆∆∆∆∆=∆ (3.10)
[ ] [ ] t
mng1mm PPP ∆∆=∆ ⋯ (3.10.a)
CCaappííttuulloo 33
53
[ ] [ ] t
refng1refref VVV ∆∆=∆ ⋯ (3.10.b)
[ ] [ ] t
Lnb1LL PPP ∆∆=∆ ⋯ (3.10.c)
[ ] [ ] t
Lnb1LL QQQ ∆∆=∆ ⋯ (3.10.d)
[ ] [ ] t
srefns1srefsref VVV ∆∆=∆ ⋯ (3.10.e)
Com estas considerações, a representação no domínio do tempo do MSP-
multimáquinas com o dispositivo FACTS STATCOM em operação, representado pelo seu
modelo simplificado, é dada na equação (3.11).
[ ] [ ][ ] [ ]
[ ][ ] [ ] u
K0
0Bz
J
Jx
K0
0Jx
2s)nbng(2xns
nsxng41
STATCOM12
12
1sng4xns
nsxng411 ∆
+∆
+∆
=∆
+
ɺ (3.11)
Na equação (3.11) a grandeza ∆Is do STATCOM (variável de controle) é uma variável
de estado para o sistema elétrico de potência. As matrizes J11, J12 e B1 são as mesmas
definidas no Capítulo 2 (equações (2.20.a), (2.20.b) e (2.20.e)). A matriz J12STATCOM é
definida, para um caso particular e melhor compreensão, na equação (3.17).
As equações algébricas, que definem o balanço de potências ativa e reativa, em cada
barra do sistema devem ser modificadas de acordo com a equação (3.7). Estas modificações
são mostradas na equação (3.12).
[ ][ ] u0Bz'JxJ0
0nsxnb2222STATCOM21 ∆+∆+∆=
(3.12)
Na equação (3.12) a submatriz B2 é a mesma da equação (2.20.f) (Capítulo 2) e a
submatriz J22’ tem a estrutura mostrada na equação (2.20.d) (Capítulo 2), diferindo apenas a
parcela 422J cuja lei de formação é mostrada na equação (3.13).

CCaappííttuulloo 33
54
4kk k
4 4kk k
4km
22 G s kmk¹m
22 22 G kmk¹m
22 km
J =R3 -I - R2 , se k for a barra de instação do STATCOM
J = J =R3 - R2 , se k não for a barra de instação do STATCOM
J =-R3
∑
∑ (3.13)
Para um melhor entendimento das matrizes inseridas pela consideração da operação do
dispositivo FACTS STATCOM (J12STATCOM e J21STATCOM), será utilizado um sistema de
potência composto por 2 geradores e 5 barras cujo diagrama unifilar é mostrado na Figura 3.6
(STAGG ; EL-ABIAB, 1982). Como exemplos serão utilizados dois dispositivos
STATCOMs: o primeiro colocado na Barra 3 e o segundo na Barra 5, equipados com
controladores da forma mostrada na Figura 3.4. Serão consideradas como entradas para os
controladores os fluxos de potência ativa entre as Barras 1 e 3 (para o STATCOM instalado
na Barra 3) e entre as Barras 2 e 5 (para o STATCOM instalado na Barra 5).
1
G
G
2 5
3 4 North
South South Elm
Main Lake
(1) (3) (4) (7)
(5)
(2) (6)
Figura 3.6: Sistema Exemplo
Para este sistema elétrico de potência são definidos os vetores de variáveis de estado,
variáveis algébricas e variáveis de entradas como nas equações (3.14), (315) e (3.16),
respectivamente.
[ ] [ ] [ ] [ ] [ ][ ] t
2s1s2fd1fd2q1q2121 IIee'e'ex ∆∆∆∆∆∆δ∆δ∆ω∆ω∆=∆ (3.14)
[ ] [ ][ ] t
5151 vvz ∆∆θ∆θ∆=∆ ⋯⋯ (3.15)

CCaappííttuulloo 33
55
[ ] [ ] [ ] [ ] [ ][ ] t
srefLLrefm VQPVPu ∆∆∆∆∆=∆ (3.16)
[ ] [ ] t
2m1mm PPP ∆∆=∆ (3.16.a)
[ ] [ ] t
2ref1refref VVV ∆∆=∆ (3.16.b)
[ ] [ ] t
5L1LL PPP ∆∆=∆ ⋯ (3.16.c)
[ ] [ ] t
5L1LL QQQ ∆∆=∆ ⋯ (3.16.d)
[ ] [ ] t
2sref1srefs VVV ∆∆=∆ (3.16.e)
A submatriz J12STATCOM está representada nas equações (3.17).
=
10,27,25,22,2
8,16,13,11,1STATCOM12 j00j0j00j0
00j0j00j0jJ (3.17)
131p1c
1c1,1 1AK
T
Kj = (3.17.a)
131p1c
1c3,1 1AK
T
Kj −= (3.17.b)
131p1c
1c6,1 2AK
T
Kj = (3.17.c)
( )1s131p1c
1c8,1 K3AK
T
Kj −= (3.17.d)
252p2c
2c2,2 1AK
T
Kj = (3.17.e)
252p2c
2c5,2 1AK
T
Kj −= (3.17.f)
252p2c
2c7,2 2AK
T
Kj = (3.17.g)
CCaappííttuulloo 33
56
( )2s252p2c
2c10,2 K3AK
T
Kj −= (3.17.h)
A submatriz J21STATCOM é mostrada na equação (3.18) onde J21 é a mesma matriz da
equação (2.20.c) deduzida no Capítulo 2. A submatriz [Vs0] é definida na equação (3.19).
[ ][ ]
=
nsxnb0s
nsxnb
21STATCOM21 V
0JJ (3.18)
[ ]
=
ns,ns0s
1,01s
0s
v
v
V ⋱ (3.19)
STATCOMinstaladopossuiibarraasese,Vv
STATCOMinstaladopossuinãoibarraase,0v
jise,0v
ij,i0s
i,i0s
j,i0s
−==
≠=
Retomando o equacionamento genérico, as equações (3.11) e (3.12) podem ser
agrupadas, fornecendo a representação no domínio do tempo do MSP-multimáquinas, com a
consideração da operação de dispositivos STATCOMs modelados de forma simplificada,
equipados com controladores de primeira ordem, como na equação (3.20).
[ ][ ] [ ]
[ ][ ] [ ]
[ ][ ]u
0B
K0
0B
z
x
'JJ
J
J
K0
0J
0
x
nsxnb22
2s)nbng(2xns
nsxng41
22STATCOM21
STATCOM12
12
1sng4xns
nsxng411
∆
+
∆∆
=
∆+
ɺ
(3.20)
A eliminação das variáveis algébricas (vetor ∆z) permite uma representação no espaço
de estados do MSP-multimáquinas com um STATCOM (representado pelo seu modelo
simplificado) em operação similar à representação realizada no Capítulo 2 (equações (2.22)).
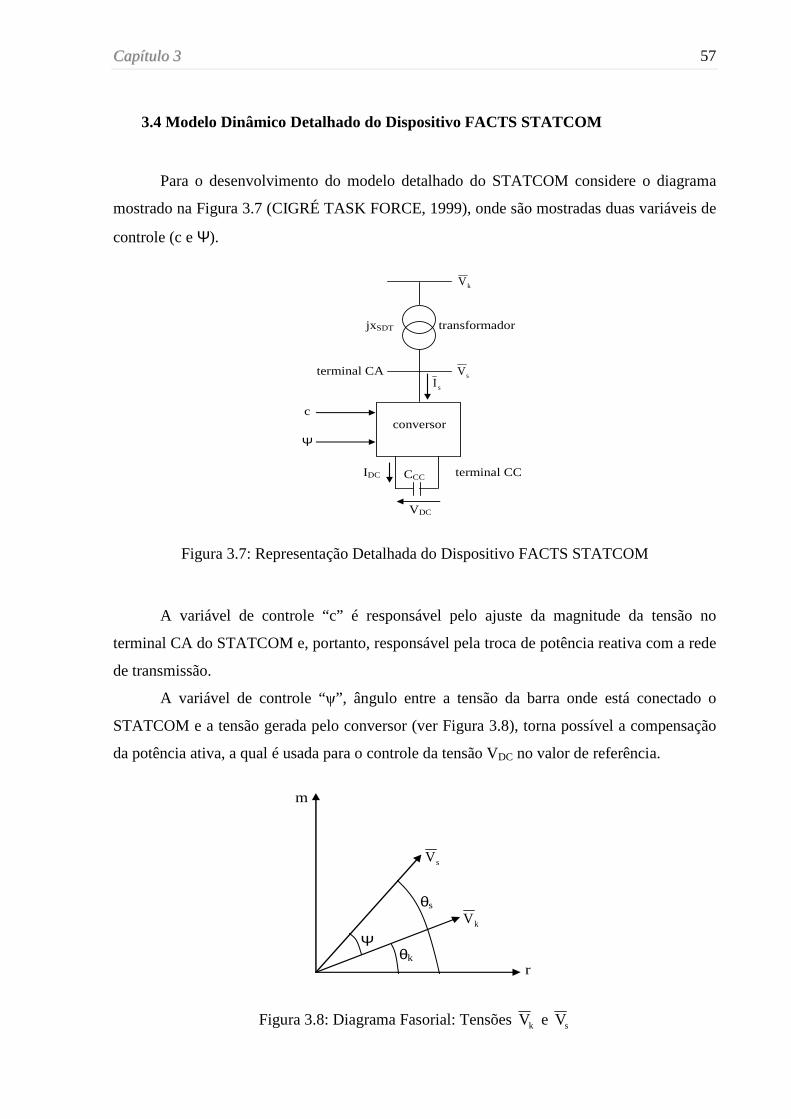
CCaappííttuulloo 33
57
3.4 Modelo Dinâmico Detalhado do Dispositivo FACTS STATCOM
Para o desenvolvimento do modelo detalhado do STATCOM considere o diagrama
mostrado na Figura 3.7 (CIGRÉ TASK FORCE, 1999), onde são mostradas duas variáveis de
controle (c e Ψ).
kV
conversor
CCC
transformador
terminal CA
VDC
sV
sI
jxSDT
terminal CC IDC
c
Ψ
Figura 3.7: Representação Detalhada do Dispositivo FACTS STATCOM
A variável de controle “c” é responsável pelo ajuste da magnitude da tensão no
terminal CA do STATCOM e, portanto, responsável pela troca de potência reativa com a rede
de transmissão.
A variável de controle “ψ”, ângulo entre a tensão da barra onde está conectado o
STATCOM e a tensão gerada pelo conversor (ver Figura 3.8), torna possível a compensação
da potência ativa, a qual é usada para o controle da tensão VDC no valor de referência.
θk Ψ
r
m
θs
kV
sV
Figura 3.8: Diagrama Fasorial: Tensões kV e sV

CCaappííttuulloo 33
58
Para a dedução do modelo detalhado do STATCOM no MSP-multimáquinas considere
que sua instalação no sistema elétrico de potência ocorra em uma barra genérica k como
mostrado no diagrama unifilar da Figura 3.9.
Vk∠θk
Zkm
Vm∠θm
conversor c
Ψ
Ps, Qs
Figura 3.9: Sistema Elétrico com um STATCOM (Modelo Detalhado) em Operação
A tensão no terminal CA (VCA) e a tensão no terminal CC (VDC) do STATCOM bem
como a tensão da barra onde está instalado o dispositivo são dadas pelas equações (3.21),
(3.22) e (3.23), respectivamente.
s s sV =V θ∠ (3.21)
DC DCCC
1V = I dt
C ∫ (3.22)
k kV =V θk∠ (3.23)
A tensão inserida pelo STATCOM (sV ) pode ser controlada em magnitude (através do
parâmetro c) e fase (através do parâmetro Ψ), conforme a definição desta tensão dada na
equação (3.24) (CIGRÉ TASK FORCE, 1999) (ver diagrama fasorial da Figura 3.8).
s s s DC kV =V θ =cV ψ+θ∠ ∠ (3.24)
A partir da Figura 3.7 a corrente que circula pelo STATCOM ( sI ) é dada pela equação
(3.25) onde xSDT é a reatância de acoplamento do transformador.

CCaappííttuulloo 33
59
SDT
sks jx
VVI
−= (3.25)
A substituição das equações (3.23) e (3.24) na equação (3.25) fornece a equação
(3.26), que descreve a corrente que circula pelo STATCOM, decomposta em parte real e parte
imaginária.
k k DC k k k DC ks
SDT SDT
V senθ -cV sen(ψ+θ ) V cosθ -cV cos(ψ+θ )I = -j
x x (3.26)
A potência complexa desenvolvida pelo STATCOM é dada pela equação (3.27), onde
as parcelas Ps e Qs são referentes à potência ativa e à potência reativa desenvolvida,
respectivamente.
ss*skk jQPIVS +==ɺ (3.27)
A substituição das equações (3.23) e (3.26) na equação (3.27) permite escrever as
expressões da potência ativa e da potência reativa desenvolvidas pelo STATCOM (equações
(3.28) e (3.29), respectivamente).
k DCs
SDT
V cV senψP =
x (3.28)
2k k DC
sSDT
V -V cV cosψQ =
x (3.29)
A análise das equações (3.28) e (3.29) permite observar que tanto a potência ativa
como a potência reativa desenvolvidas pelo STATCOM não dependem do ângulo da barra k
(ângulo θk), barra esta onde se encontra instalado o dispositivo FACTS. Além disso, também
é possível verificar que tanto a potência ativa como a potência reativa dependem das variáveis
de controle do STATCOM (c e ψ).
Considerando pequenas variações em torno de um ponto de equilíbrio estável, a
equação (3.28) pode ser linearizada, resultando no conjunto de equações (3.30).
CCaappííttuulloo 33
60
s k k DC DC c ψ∆P =A ∆V +A ∆V +A ∆c+A ∆ψ (3.30)
s DCk
k SDT
P cV senψA =
V x
∂ =∂
(3.30.a)
s kDC
DC SDT
P V csenψA = =
V x
∂∂
(3.30.b)
s k DCc
SDT
P V V senψA = =
c x
∂∂
(3.30.c)
s k DCψ
SDT
P V cV cosψA = =
ψ x
∂∂
(3.30.d)
Procedimento análogo pode ser realizado com a equação (3.28), o que resultará no
conjunto de equações (3.31).
s k k DC DC c ψ∆Q =R ∆V +R ∆V +R ∆c+R ∆ψ (3.31)
SDT
DCk
k
sk x
coscVV2
V
QR
ψ−=
∂∂
= (3.31.a)
SDT
k2k
DC
sDC x
coscVV
V
QR
ψ−=
∂∂
= (3.31.b)
2s k k DC
cSDT
Q V -V V cosψR = =
c x
∂∂
(3.31.c)
SDT
DCks
x
sencVVQR
ψ=
ψ∂∂
=ψ (3.31.d)
Da equação (3.22) pode ser escrita a equação (3.32), que introduz uma nova variável
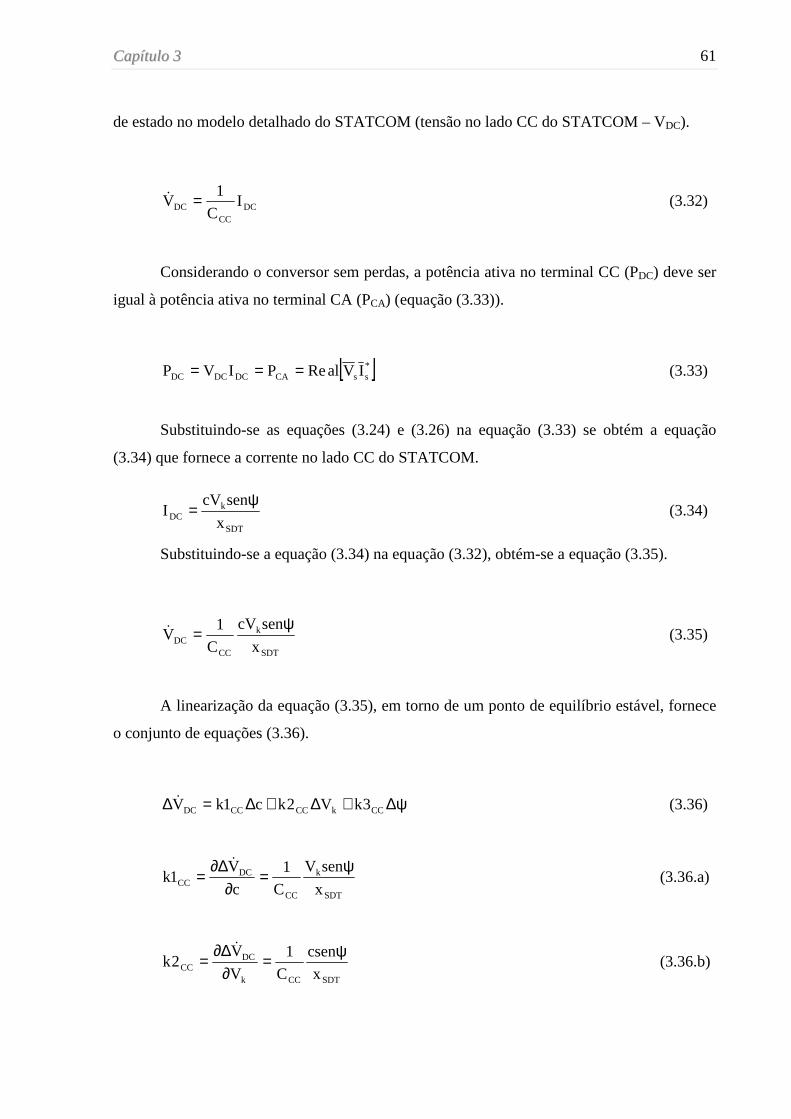
CCaappííttuulloo 33
61
de estado no modelo detalhado do STATCOM (tensão no lado CC do STATCOM – VDC).
DCCC
DC IC
1V =ɺ (3.32)
Considerando o conversor sem perdas, a potência ativa no terminal CC (PDC) deve ser
igual à potência ativa no terminal CA (PCA) (equação (3.33)).
[ ]*ssCADCDCDC IValRePIVP === (3.33)
Substituindo-se as equações (3.24) e (3.26) na equação (3.33) se obtém a equação
(3.34) que fornece a corrente no lado CC do STATCOM.
SDT
kDC x
sencVI
ψ= (3.34)
Substituindo-se a equação (3.34) na equação (3.32), obtém-se a equação (3.35).
SDT
k
CCDC x
sencV
C
1V
ψ=ɺ (3.35)
A linearização da equação (3.35), em torno de um ponto de equilíbrio estável, fornece
o conjunto de equações (3.36).
ψ∆+∆+∆=∆ CCkCCCCDC 3kV2kc1kVɺ (3.36)
SDT
k
CC
DCCC x
senV
C
1
c
V1k
ψ=
∂∆∂
=ɺ
(3.36.a)
SDTCCk
DCCC x
csen
C
1
V
V2k
ψ=∂∆∂
=ɺ
(3.36.b)
CCaappííttuulloo 33
62
SDT
k
CC
DCCC x
coscV
C
1V3k
ψ=
ψ∂∆∂
=ɺ
(3.36.c)
Para a inclusão do dispositivo FACTS STATCOM (representado pelo seu modelo
detalhado) no MSP é necessária a definição de um controlador para os parâmetros “c” e “Ψ”
que neste trabalho assumirá a forma mostrada na Figura 3.10.
c
c
K
1 s T+
K
1 s TΨ
Ψ+
–
+
+
+ –
∆VDCref
∆VDC
∆Ψ
∆c ∆Vkref
∆Vk
∆Pkm
Figura 3.10: Modelo do Controlador Detalhado do Dispositivo FACTS STATCOM
Para a variável Ψ, o bloco de controle é definido pela constante de tempo TΨ,
representando o atraso inerente ao disparo dos tiristores, e o ganho estático KΨ. Para o caso da
variável c, define-se de maneira semelhante uma constante de Tc e um ganho estático Kc, que
utiliza como sinal de entrada as variações do fluxo de potência ativa na linha de transmissão
de instalação do STATCOM (equação (3.3)).
De maneira análoga à realizada para o dispositivo FACTS STATCOM representado
pelo seu modelo simplificado, a partir do diagrama de blocos mostrado na Figura 3.10, podem
ser escritas as equações (3.37) e (3.38), que representam o comportamento dinâmico das
variáveis “c” e “Ψ” de ns dispositivos STATCOMs instalados em um sistema de potência de
nb barras e ng geradores,respectivamente.
[ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ] [ ][ ]
[ ][ ] [ ][ ]s6csref5c
ms4cks3cms2cks2c1c
VKVK
VKVKKKcKc
∆+∆+
∆+∆+θ∆−θ∆+∆=∆ɺ (3.37)
[ ] [ ] t
ns1 ccc ∆∆=∆ ⋯ (3.37.a)

CCaappííttuulloo 33
63
[ ] [ ] t
kns1kks θ∆θ∆=θ∆ ⋯ (3.37.b)
[ ] [ ] t
mns1mms θ∆θ∆=θ∆ ⋯ (3.37.c)
[ ] [ ] t
kns1kks VVV ∆∆=∆ ⋯ (3.37.d)
[ ] [ ] t
mns1mms VVV ∆∆=∆ ⋯ (3.37.e)
[ ] [ ] t
srefns1srefsref VVV ∆∆=∆ ⋯ (3.37.f)
[ ] [ ] t
ns1s VVV ∆∆=∆ ⋯ (3.37.g)
[ ]
=
cns
1c
c
T
T
T ⋱ (3.37.h)
[ ]
=
cns
1c
c
K
K
K ⋱ (3.37.i)
[ ]
=
kmns
1km
kms
1A
1A
1A ⋱ (3.37.j)
[ ]
=
kmns
1km
kms
2A
2A
2A ⋱ (3.37.k)
[ ]
=
kmns
1km
kms
3A
3A
3A ⋱ (3.37.l)

CCaappííttuulloo 33
64
[ ] [ ] 1c1c TK −−= (3.37.m)
[ ] [ ][ ] [ ]kms1
cc2c 1ATKK −= (3.37.n)
[ ] [ ][ ] [ ]kms1
cc3c 2ATKK −= (3.37.o)
[ ] [ ][ ] [ ]kms1
cc4c 3ATKK −= (3.37.p)
[ ] [ ][ ] 1cc5c TKK −−= (3.37.q)
[ ] [ ][ ] [ ]5c1
cc6c KTKK −== − (3.37.r)
[ ] [ ][ ] [ ][ ] [ ][ ]ψ∆+∆+∆=ψ∆ ψψψ 3DCref2DC1 KVKVKɺ (3.38)
[ ] [ ] t
ns1 ψ∆ψ∆=ψ∆ ⋯ (3.38.a)
[ ] [ ] t
DCns1DCDC VVV ∆∆=∆ ⋯ (3.38.b)
[ ] [ ] t
DCrefns1DCrefDCref VVV ∆∆=∆ ⋯ (3.38.c)
[ ]
=
ψ
ψ
ψ
ns
1
K
K
K ⋱ (3.38.d)
[ ]
=
ψ
ψ
ψ
ns
1
T
T
T ⋱ (3.38.e)
[ ] [ ][ ] [ ]21
1 KTKK ψ−
ψψψ =−= (3.38.f)

CCaappííttuulloo 33
65
[ ] [ ] 13 TK −
ψψ −= (3.38.g)
Para a consideração do balanço nodal de potências, as equações (2.16) (Capítulo 2),
são modificadas, assumindo a forma das equações (3.39) e (3.40), referentes à Figura 3.9.
k
Gk Lk km sm ÎΩ
∆P -∆P - (∆P )-∆P =0∑ (3.39)
k
Gk Lk km sm ÎΩ
∆Q -∆Q - (∆Q )-∆Q =0∑ (3.40)
A substituição das equações (2.5), (2.7), (2.9), (2.11) (mostradas no Capítulo 2), (3.30)
e (3.31) nas equações (3.39) e (3.40) fornecem as equações algébricas modificadas do MSP-
multimáquinas que refletem a inclusão do dispositivo FACTS STATCOM, representado pelo
seu modelo detalhado, no sistema elétrico de potência (equações (3.41)).
( )
( )
k
k
jk j k jk j jk k k
km k m km k km m DC DC cm
jk j k jk j jk k k
km k m km k km m DC DC cm
A1 ( ) A2 V (A3 A ) V
[A1 ( ) A2 V A3 V )] A V A c A 0
R1 ( ) R2 V (R3 R ) V
[R1 ( ) R2 V R3 V ] R V R c R 0
Ψ∈Ω
Ψ∈Ω
∆ θ −θ + ∆ + − ∆ −
− ∆ θ −θ + ∆ + ∆ − ∆ + ∆ + ∆ψ =
∆ θ −θ + ∆ + − ∆ −
− ∆ θ −θ + ∆ + ∆ − ∆ + ∆ + ∆ψ =
∑
∑
(3.41)
Observe que para esta modelagem do STATCOM tanto as variações da potência ativa
como da potência reativa são modificadas, diferentemente quando da consideração do modelo
simplificado.
Para a representação do MSP-multimáquinas com ng geradores, nb barras e ns
dispositivo STATCOMs modelos de forma detalhada no domínio do tempo, considere o vetor
de variáveis de estado ∆x, o vetor de variáveis algébricas ∆z e o vetor de entradas ∆u
definidos nas equações (3.42), (3.43) e (3.44), respectivamente.
[ ] [ ] [ ] [ ] [ ] [ ] t
q fd DCx e ' e V c ∆ = ∆ω ∆δ ∆ ∆ ∆ ∆ ∆ψ (3.42)

CCaappííttuulloo 33
66
[ ] t1 ng[ ... ]∆ω = ∆ω ∆ω (3.42.a)
[ ] t1 ng[ ... ]∆δ = ∆δ ∆δ (3.42.b)
[ ] t'q.
'qq ]e...e['e
ng1∆∆=∆ (3.42.c)
[ ] t
fdfdfd ]e...e[eng1
∆∆=∆ (3.42.d)
[ ] t
DCns.DCDC ]V...V[V1
∆∆=∆ (3.42.e)
[ ] t
ns.1 ]c...c[c ∆∆=∆ (3.42.f)
[ ] t1. ns[ ... ]∆ψ = ∆ψ ∆ψ (3.42.g)
[ ] t1 nb 1 nb∆z= [∆θ ...∆θ ] [∆V ...∆V ] (3.43)
[ ] [ ] [ ] [ ] [ ] [ ][ ] t
DCrefsrefLLrefm VVQPVPu ∆∆∆∆∆∆=∆ (3.44)
[ ] [ ] t
mng1mm PPP ∆∆=∆ ⋯ (3.44.a)
[ ] [ ] t
refng1refref VVV ∆∆=∆ ⋯ (3.44.b)
[ ] [ ] t
Lnb1LL PPP ∆∆=∆ ⋯ (3.10.c)
[ ] [ ] t
Lnb1LL QQQ ∆∆=∆ ⋯ (3.44.d)
[ ] [ ] t
srefns1srefsref VVV ∆∆=∆ ⋯ (3.44.e)

CCaappííttuulloo 33
67
[ ] [ ] t
DCrefDCrefDCref ns1VVV ∆∆=∆ ⋯ (3.44.f)
Com estas considerações, a representação no domínio do tempo do MSP-
multimáquinas com o dispositivo FACTS STATCOM em operação, representado pelo seu
modelo detalhado é dado na equação (3.45).
uB
B
z
x
JJ
JJ
0
x
2
1
2221
1211 ∆
+
∆∆
=
∆ɺ (3.45)
As submatrizes J11, J12, J21 e J22 são mostradas nas equações (3,46), (3.47), (3.48) e
(3.49), lembrando que os coeficientes dos controladores estão organizados de acordo com o
número de dispositivos STATCOM instalados e das características do sistema (números de
barras e máquinas) como foi explicado através do sistema exemplo para o caso do
STATCOM ser representado pelo seu modelo simplificado.
-1 -1 -1-[M] [D] -[M] [A1 ] -[M] [A2 ] [0] [0] [0] [0]G G ng x ng ng x ns ng x ns ng x ns
[ω ] [0] [0] [0] [0] [0] [0]o ng x ng ng x ng ng x ng ng x ns ng x ns ng x ns
-1 -1 -1 -1[0] -[T ] [K ] -[T ] [x ][x ] [T ] [0]ng x ng do A do d d do ng x ns
J =11
′ ′ ′ ′ [0] [0]ng x ns ng x ns
-1[0] [0] [0] -[T ] [0] [0] [0]ng x ng ng x ng ng x ng r ng x ns ng x ns ng x ns
[0] [0] [0] [0] [0] [K ] [K ]ns x ng ns x ng ns x ng ns x ng ns x ns DC1 DC3
[0] [0] [0] [0] [0]ns x ng ns x ng ns x ng ns x ng ns x ns
′
[K ] [0]C1 ns x ns
[0] [0] [0] [0] [K ] [0] [K ]ns x ng ns x ng ns x ng ns x ng Ψ1 ns x ns Ψ3
(3.46)
-1 -1[M] [A1 ] [0] -[M] [A3 ] [0]G ng x nb-ng G ng x nb-ng
[0] [0] [0] [0]ng x ng ng x nb-ng ng x ng ng x nb-ng
-1 -1[T ] [K ] [0] [T ] [K ] [0]do A ng x nb-ng do V ng x nb-ng
-1J = [0] [0] -[K ][T ] [0]12 ng x ng ng x nb-ng r r ng x nb-ng
[0]ns
′ ′
[0] [0] [K ]x ng ns x nb-ng ns x ng DC2
[0] [K ] [0] [K K K ]ns x ng C2 ns x ng C3 C4 C6
[0] [0] [0] [0]ns x ng ns x nb-ng ns x ng ns x nb-ng
(3.47)

CCaappííttuulloo 33
68
[0] [A1 ] [A2 ] [0] [0] [0] [0]ng x ng G G ng x ng ng xns ng x ns ng x ns
[0] [0] [0] [0] [-A ] [-A ] [-A ]nb - ng x ng nb - ng x ng nb - ng x ng nb - ng x ng DC C ΨJ =21 [0] [R1 ] [R2 ] [0] [0] [0] [0]ng x ng G G ng x ng ng x ns ng x ns ng x ns
[0] [0] [0] [0] [-R ] [-A ] [-R ]nb - ng x ng nb - ng x ng nb - ng x ng nb - ng x ng DC C Ψ
(3.48)
1 2
3 4
22 22
22
22 22
J J
J
J J
=
⋯ ⋯ (3.49)
1kk k
1
1km
22 G kmk m
22
22 km
J A1 A1J
J A1≠
= − − =
=
∑ (3.49.a)
2kk k
2 2kk k
2km
22 G k kmk m
22 22 G kmk m
22 km
J A3 A A2 , se k for a barra de instalação do STATCOM
J J A3 A2 , se k não for barra de instalação do STATCOM
J A3
≠
≠
= − − = = − = −
∑
∑
(3.49.b)
3kk k
3
3km
22 G kmk m
22
22 km
J R1 R1J
J R1≠
= − − =
=
∑ (3.49.c)
4kk k
4 4kk k
4km
22 G k kmk m
22 22 G kmk m
22 km
J R3 R R2 , se k for a barra de instalação do STATCOM
J J R3 R2 , se k não for barra de instalação do STATCOM
J R3
≠
≠
= − − = = − = −
∑
∑
(3.49.d)
As matrizes que relacionam as entradas do sistema também são modificadas,
resultando nas equações (3.50) e (3.51).

CCaappííttuulloo 33
69
[ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ][ ] [ ][ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ]
= −
−
2nsxngnbxnsnbxnsngxnsngxns
nsxng5cnbxnsnbxnsngxnsngxns
nsxngnsxngnbxnsnbxnsngxnsngxns
nsxngnsxngnbxngnbxng1
rrngxng
nsxngnsxngnbxngnbxngngxngngxng
nsxngnsxngnbxngnbxngngxngngxng
nsxngnsxngnbxngnbxngngxng1
1
K00000
0K0000
000000
0000TK0
000000
000000
00000M
B
ψ
(3.50)
[ ] [ ] [ ][ ] [ ] [ ]
−−
=nbxnbnbxnbngxnbngxnb
nbxnbnbxnbngxnbngxnb
2 I000
0I00B (3.51)
Na equação (3.51) Inb x nb é a matriz identidade de ordem nb x nb.
Observe que na representação matricial mostrada na equação (3.45) as variáveis de
controle do STATCOM (∆c e ∆ψ) são tratadas como variáveis de estado para o sistema
multimáquinas.
De maneira análoga ao procedimento realizado no Capítulo 2, a eliminação das
variáveis algébricas (vetor ∆z) permite uma representação no espaço de estados do MSP-
multimáquinas com um STATCOM representado pelo seu modelo detalhado, resultando em
equações simulares às equações (2.22).
3.5 Conclusões
Neste capítulo foram apresentados estudos a respeito da modificação do MSP-
multimáquinas para a consideração do dispositivo FACTS STATCOM em operação.
Nestes estudos foram apresentados dois modelos para o dispositivo STATCOM: um
chamado de “simplificado” e outro denominado de “detalhado”.
O STATCOM representado pelo modelo simplificado não permite a troca de potência
ativa com o sistema elétrico de potência, pois seria necessária a adição de uma fonte adicional
de alimentação no lado CC do dispositivo. Diferentemente, considerando o modelo detalhado,
o dispositivo FACTS STATCOM pode trocar potência reativa e também potência ativa com o
sistema elétrico de potência.
Pelo fato de o interesse ser o estudo da estabilidade a pequenas perturbações, os
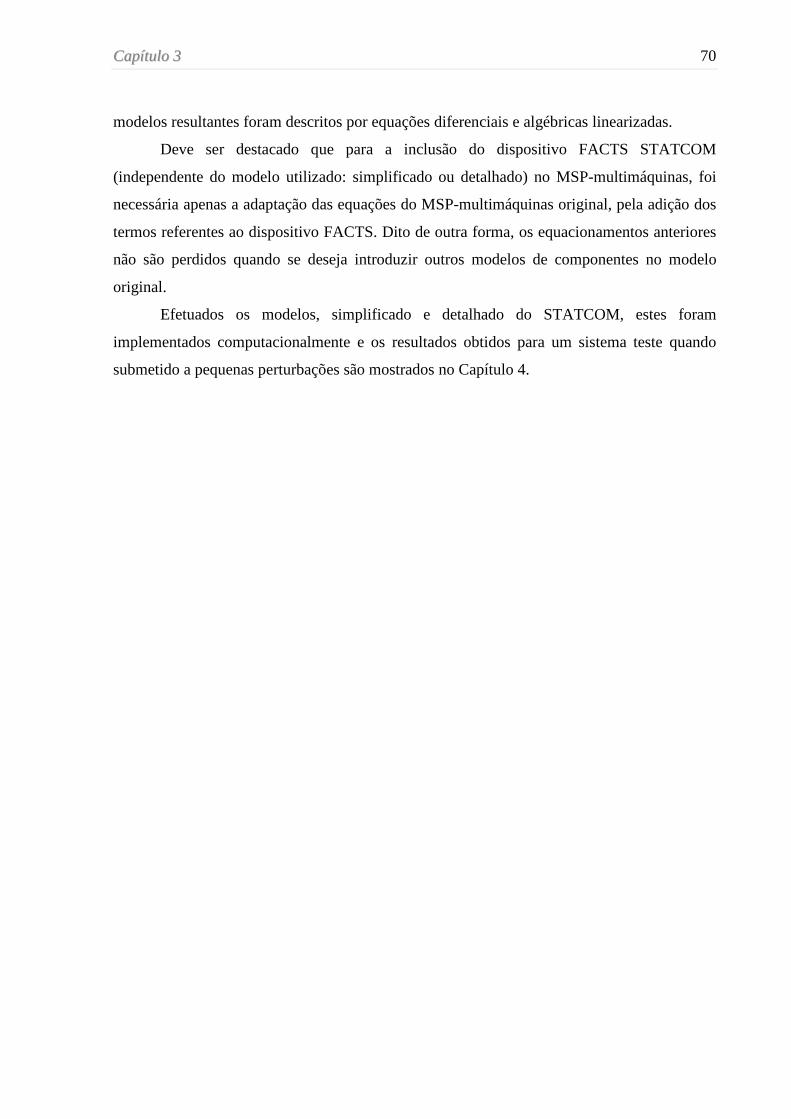
CCaappííttuulloo 33
70
modelos resultantes foram descritos por equações diferenciais e algébricas linearizadas.
Deve ser destacado que para a inclusão do dispositivo FACTS STATCOM
(independente do modelo utilizado: simplificado ou detalhado) no MSP-multimáquinas, foi
necessária apenas a adaptação das equações do MSP-multimáquinas original, pela adição dos
termos referentes ao dispositivo FACTS. Dito de outra forma, os equacionamentos anteriores
não são perdidos quando se deseja introduzir outros modelos de componentes no modelo
original.
Efetuados os modelos, simplificado e detalhado do STATCOM, estes foram
implementados computacionalmente e os resultados obtidos para um sistema teste quando
submetido a pequenas perturbações são mostrados no Capítulo 4.

CCaappííttuulloo 44
71
Capítulo 4
Resultados e Simulações
4.1 Introdução
Neste capítulo são efetuados estudos preliminares a respeito da estabilidade a
pequenas perturbações de um sistema teste, aplicando a modelagem desenvolvida nos
capítulos anteriores e assim, estudar a influência da inclusão de dispositivos FACTS
STATCOM na estabilidade do sistema elétrico de potência.
Serão apresentados e discutidos os resultados obtidos de simulações realizadas no
sistema teste, cuja implementação computacional foi realizada utilizando-se o software
MatLab®.
Deve ainda ser salientado que não é do escopo deste trabalho a análise de métodos de
solução de fluxo de potência, porém, para a obtenção da solução do caso base para o sistema
teste foi utilizada a ferramenta MATPOWER®, desenvolvida em linguagem MatLab®
(ZIMMERMAN ; GAN, 2009).
4.2 Sistema Simétrico de Duas Áreas – Caso Base
O sistema multimáquinas hipotético, cujo diagrama unifilar é mostrado na Figura 4.1
foi proposto para se estudar os fatores que influenciam os modos interárea de oscilação
(KLEIN et al., 1991). Trata-se de um sistema simétrico, composto por duas áreas e vem sendo
utilizado com frequência na literatura. Os dados dos geradores, barras, linhas de transmissão e
fluxo de potência para o caso base são mostrados no Apêndice II.
A partir do diagrama unifilar observa-se a existência de duas áreas simétricas, sendo
estas conectadas por três linhas de transmissão paralelas longas, ou seja, com alta reatância
indutiva, constituindo uma interligação eletricamente fraca entre os sistemas, normalmente
designada por “tie-line”. Tal fato contribui para a falta de amortecimento do sistema sob
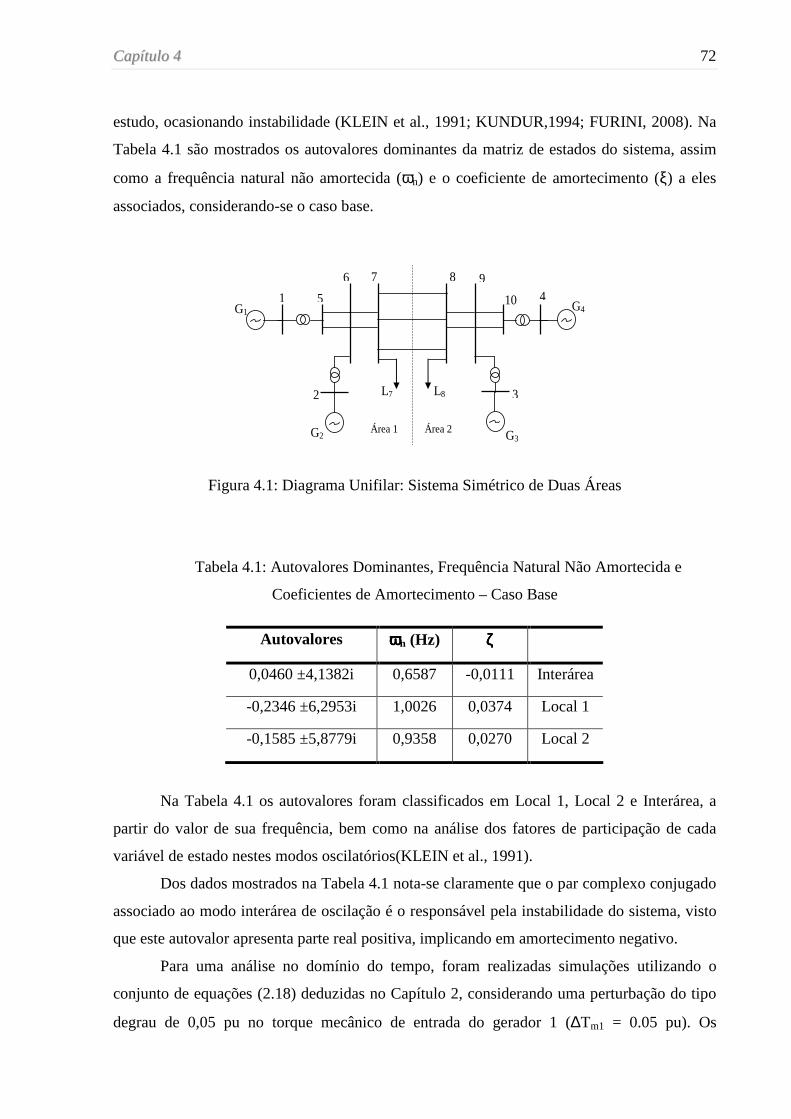
CCaappííttuulloo 44
72
estudo, ocasionando instabilidade (KLEIN et al., 1991; KUNDUR,1994; FURINI, 2008). Na
Tabela 4.1 são mostrados os autovalores dominantes da matriz de estados do sistema, assim
como a frequência natural não amortecida (ωn) e o coeficiente de amortecimento (ξ) a eles
associados, considerando-se o caso base.
1
2 3
4 5
6 7 8 9
10 G1
G2 G3
G4
L7 L8
Área 1 Área 2
Figura 4.1: Diagrama Unifilar: Sistema Simétrico de Duas Áreas
Tabela 4.1: Autovalores Dominantes, Frequência Natural Não Amortecida e
Coeficientes de Amortecimento – Caso Base
Autovalores ωωωωn (Hz) ζζζζ
0,0460 ±4,1382i 0,6587 -0,0111 Interárea
-0,2346 ±6,2953i 1,0026 0,0374 Local 1
-0,1585 ±5,8779i 0,9358 0,0270 Local 2
Na Tabela 4.1 os autovalores foram classificados em Local 1, Local 2 e Interárea, a
partir do valor de sua frequência, bem como na análise dos fatores de participação de cada
variável de estado nestes modos oscilatórios(KLEIN et al., 1991).
Dos dados mostrados na Tabela 4.1 nota-se claramente que o par complexo conjugado
associado ao modo interárea de oscilação é o responsável pela instabilidade do sistema, visto
que este autovalor apresenta parte real positiva, implicando em amortecimento negativo.
Para uma análise no domínio do tempo, foram realizadas simulações utilizando o
conjunto de equações (2.18) deduzidas no Capítulo 2, considerando uma perturbação do tipo
degrau de 0,05 pu no torque mecânico de entrada do gerador 1 (∆Tm1 = 0.05 pu). Os

CCaappííttuulloo 44
73
principais resultados são mostrados nas Figuras 4.2 (variações da velocidade angular dos
geradores) e 4.3 (variação do ângulo interno dos geradores), onde o gerador 1 foi adotado
como referência para o sistema de potência multimáquinas.
0 1 2 3 4 5 6 7 8 9 10-1.5
-1
-0.5
0
0.5
1
1.5x 10
-4
Tempo (s)
Var
iaçã
o da
vel
ocid
ade
angu
lar
(rad
/s)
gerador 2
gerador 3
gerador 4
Figura 4.2: Variações da Velocidade Angular – Caso Base
0 1 2 3 4 5 6 7 8 9 10-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10
-3
Tempo (s)
Des
loca
men
to a
ngul
ar (
rad)
gerador 2
gerador 3
gerador 4
Figura 4.3: Variações do Ângulo Interno – Caso Base

CCaappííttuulloo 44
74
As Figuras 4.2 e 4.3 demonstram a instabilidade do sistema decorrente da existência
de um par complexo conjugado com parte real positiva, associado ao modo interárea,
expresso na Tabela 4.1. Observa-se que as curvas apresentam oscilações de amplitudes
crescentes, característica da perda de estabilidade por falta de torque de amortecimento (ou a
existência de amortecimento negativo) apresentado pelo sistema.
Para solucionar o problema da instabilidade é proposta a inclusão do dispositivo
FACTS STATCOM ao sistema em questão. Após, será avaliado o desempenho do sistema de
potência quando sujeito a pequenas perturbações com os dois modelos estudados para o
STATCOM.
Como local de instalação do STATCOM foi escolhida a barra 8 (FURINI ; ARAUJO,
2008; PEREIRA et al., 2009), baseado na avaliação dos fatores de participação (MARTINS,
1986; MARTINS ; LIMA, 1999), com a consideração da atuação de controles adicionais
sobre as variáveis de interesse do STATCOM.
Para as simulações serão adotados valores fixos para os parâmetros dos controladores,
sendo Kc = 200, Tc = 0,01, Ks = 1 e Kp=1, referentes ao modelo simplificado. Para o modelo
detalhado foram considerados Kc = 200, Tc = 0,01, KΨ = 150 e TΨ=0,01 .
Os valores dos parâmetros dos controladores foram escolhidos para tornar possível
que tanto a modelagem simplificada como a modelagem detalhada, possuíssem controladores
com parâmetros iguais para se realizar uma posterior comparação entre os resultados obtidos.
Deve ainda ser observado que os valores adotados são valores típicos, retirados da literatura
especializada e não foram submetidos a nenhum processo de refinamento ou de otimização
(WANG, 1999).
4.3 Simulações: Dispositivo FACTS STATCOM: Modelo Simplificado
O modelo simplificado do STATCOM pode ser representado por uma fonte de
corrente em derivação, conforme descrito no Capítulo 3. Sua variável de entrada IS foi
modulada por um controlador de primeira ordem, conforme mostrado na equação (3.4).
Considerando a mesma perturbação em degrau de 0,05 pu no torque mecânico do gerador 1,
novas simulações foram realizadas (a partir da equação (3.20)) e os resultados obtidos para

CCaappííttuulloo 44
75
uma análise no domínio da frequência são listados na Tabela 4.2 (autovalores dominantes e
seus respectivos coeficientes de amortecimento e frequências não amortecidas).
Analisando os dados mostrados na Tabela 4.2 pode-se afirmar que a operação do
STATCOM conseguiu tornar o sistema de potência teste estável (observe que o modo
interárea de oscilação, antes com parte real positiva, com a atuação do STATCOM passa a
apresentar parte real negativa e, consequentemente, coeficiente de amortecimento positivo).
Quanto aos autovalores associados aos modos locais de oscilação, estes sofrem
alteração.
Uma comparação entre os valores apresentados nas Tabelas 4.1 e 4.2 dos valores dos
coeficientes de amortecimento a eles associados permite concluir que a atuação do
STATCOM torna o modo Local 1 mais amortecido (o ξ a ele associado apresentado na Tabela
4.2 é maior que o ξ apresentado na Tabela 4.1). Contudo, diminui o amortecimento do modo
Local 2 (o ξ a ele associado apresentado na Tabela 4.2 é menor que o ξ apresentado na Tabela
4.1). Este fato, porém, não compromete a estabilidade do sistema elétrico de potência, visto
que todos os autovalores possuem parte real negativa.
Tabela 4.2: Autovalores Dominantes, Frequência Natural Não Amortecida e
Coeficientes de Amortecimento – STATCOM: Modelo Simplificado
Autovalores ωωωωn (Hz) ζζζζ
-0,1197 ± 1,3778i 0,2201 0,0866 Interárea
-0,2447 ± 6,2894i 1,0017 0,0389 Local 1
-0,1498 ± 5,8212i 0,9268 0,0257 Local 2
Para uma análise no domínio do tempo, na Figura 4.4 são mostrados os ângulos internos dos
geradores 2, 3 e 4 em relação ao ângulo interno do gerador 1.

CCaappííttuulloo 44
76
0 5 10 15 20 25 30-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Tempo (s)
Def
asag
em a
ngul
ar (
rad)
gerador 2
gerador 3
gerador 4
Figura 4.4: Variações dos Ângulos Internos – STATCOM: Modelo Simplificado
Observe que neste caso os comportamentos dinâmicos dos ângulos internos dos
geradores são caracterizados por oscilações de amplitudes decrescentes (amortecidas, apesar
de fracamente amortecidas, como também comprovam os valores dos coeficientes de
amortecimento listados na Tabela 4.2).
4.4 Simulações: Dispositivo FACTS STATCOM: Modelo Detalhado
As simulações do sistema teste considerando a operação do dispositivo STATCOM
representado pelo seu modelo detalhado (descrito no Capítulo 3) são apresentadas nesta seção,
considerando-se o mesmo local de instalação do dispositivo: a Barra 8.
Também neste caso será considerada a atuação de controladores de primeira ordem
sobre as variáveis de controle do STATCOM, que no modelo detalhado se referem à c e à Ψ.
É importante destacar que o modelo detalhado do STATCOM permite a compensação
de potência ativa, além da reativa.
Utilizando o conjunto de equações (3.45) foram obtidos os autovalores dominantes
listados na Tabela 4.3.

CCaappííttuulloo 44
77
Tabela 4.3: Autovalores Dominantes, Frequência Natural Não Amortecida e
Coeficientes de Amortecimento – STATCOM: Modelo Detalhado
Autovalores ωωωωn (Hz) ζζζζ
-0,1341 ±1,2118i 0,1940 0,1100 Interárea
-0,2449 ±6,2892i 1,0017 0,0389 Local 1
-0,1506 ±5,8209i 0,9267 0,0259 Local 2
Analisando-se os dados da Tabela 4.3 pode-se concluir que a atuação do STATCOM
representado pelo seu modelo detalhado conseguiu tornar o sistema teste estável, adicionando
amortecimento ao modo interárea, que se apresentava instável para o caso base.
A análise dos modos locais repete o comportamento obtido com o modelo
simplificado, isto é, aumenta o amortecimento no modo Local 1 e diminui no modo Local 2,
sem contudo comprometer a estabilidade do sistema de potência.
Para a análise no domínio do tempo, na Figura 4.5 é mostrado o comportamento
dinâmico dos ângulos internos dos geradores (também nestes casos, a máquina 1 é referência
para o sistema multimáquinas).
0 5 10 15 20 25 30-0.16
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Tempo (s)
Def
asag
em a
ngul
ar (
rad)
gerador 2
gerador 3
gerador4
Figura 4.5: Variações dos Ângulos Internos – STATCOM: Modelo Detalhado
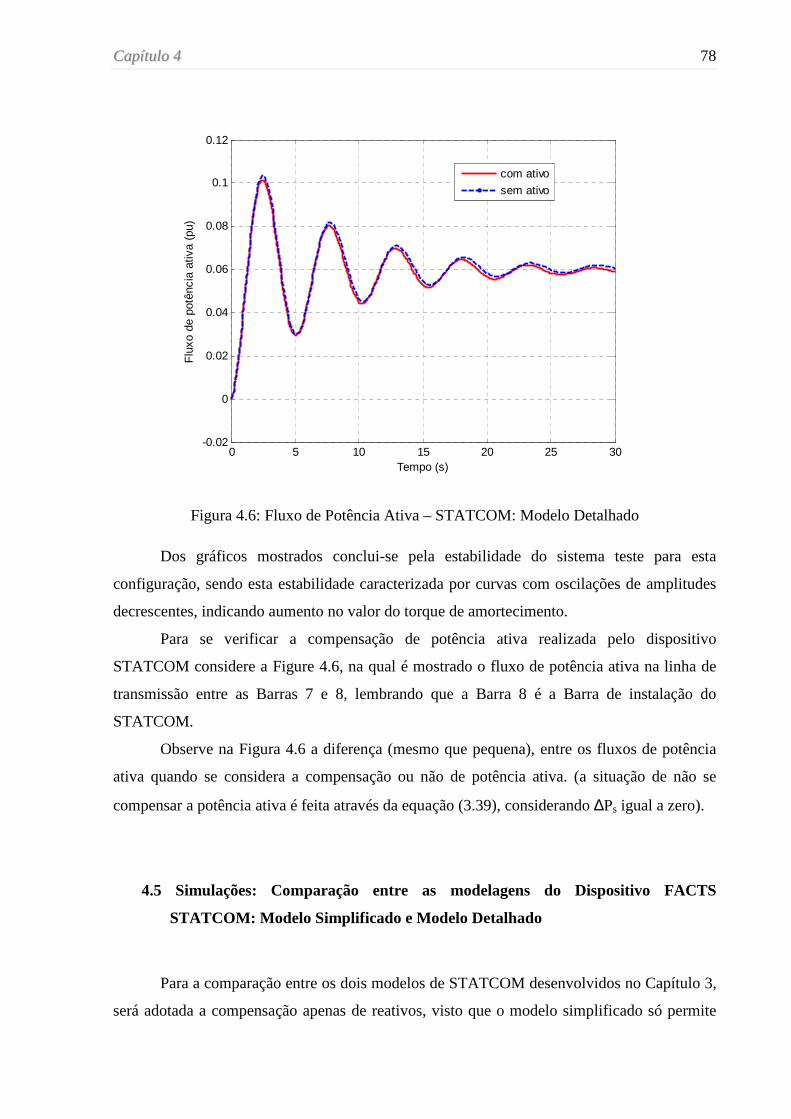
CCaappííttuulloo 44
78
0 5 10 15 20 25 30-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Tempo (s)
Flu
xo d
e po
tênc
ia a
tiva
(pu)
com ativo
sem ativo
Figura 4.6: Fluxo de Potência Ativa – STATCOM: Modelo Detalhado
Dos gráficos mostrados conclui-se pela estabilidade do sistema teste para esta
configuração, sendo esta estabilidade caracterizada por curvas com oscilações de amplitudes
decrescentes, indicando aumento no valor do torque de amortecimento.
Para se verificar a compensação de potência ativa realizada pelo dispositivo
STATCOM considere a Figure 4.6, na qual é mostrado o fluxo de potência ativa na linha de
transmissão entre as Barras 7 e 8, lembrando que a Barra 8 é a Barra de instalação do
STATCOM.
Observe na Figura 4.6 a diferença (mesmo que pequena), entre os fluxos de potência
ativa quando se considera a compensação ou não de potência ativa. (a situação de não se
compensar a potência ativa é feita através da equação (3.39), considerando ∆Ps igual a zero).
4.5 Simulações: Comparação entre as modelagens do Dispositivo FACTS
STATCOM: Modelo Simplificado e Modelo Detalhado
Para a comparação entre os dois modelos de STATCOM desenvolvidos no Capítulo 3,
será adotada a compensação apenas de reativos, visto que o modelo simplificado só permite
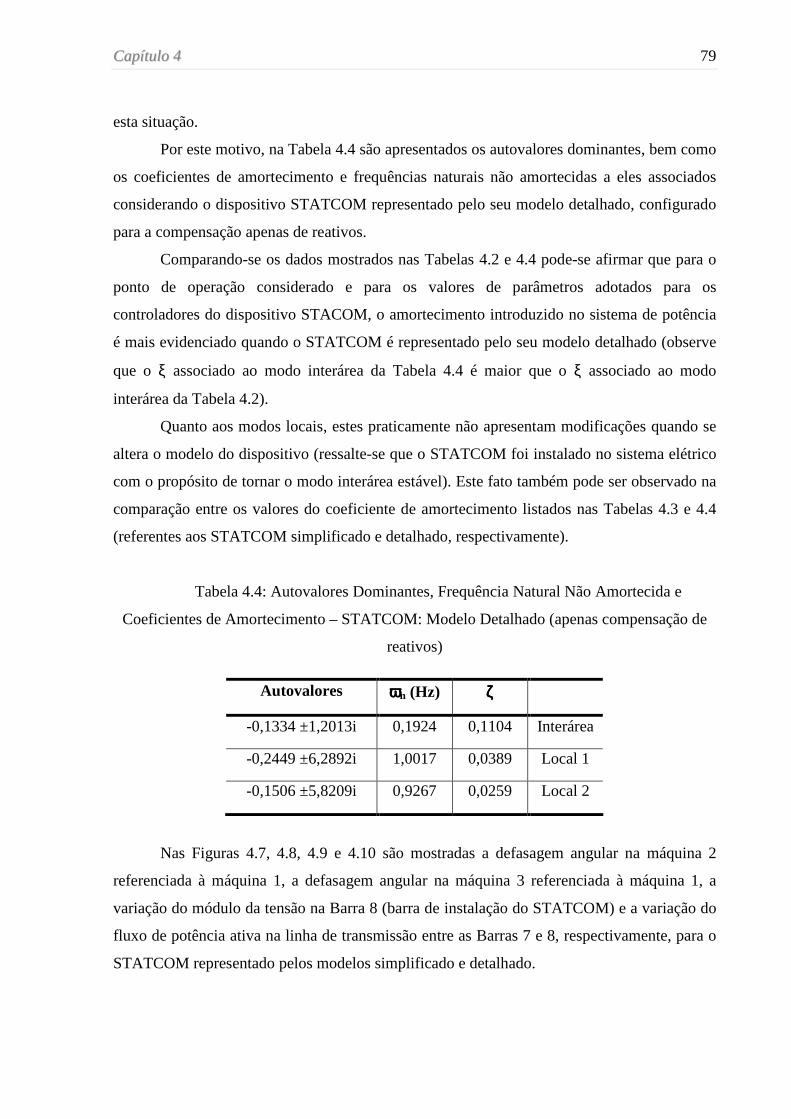
CCaappííttuulloo 44
79
esta situação.
Por este motivo, na Tabela 4.4 são apresentados os autovalores dominantes, bem como
os coeficientes de amortecimento e frequências naturais não amortecidas a eles associados
considerando o dispositivo STATCOM representado pelo seu modelo detalhado, configurado
para a compensação apenas de reativos.
Comparando-se os dados mostrados nas Tabelas 4.2 e 4.4 pode-se afirmar que para o
ponto de operação considerado e para os valores de parâmetros adotados para os
controladores do dispositivo STACOM, o amortecimento introduzido no sistema de potência
é mais evidenciado quando o STATCOM é representado pelo seu modelo detalhado (observe
que o ξ associado ao modo interárea da Tabela 4.4 é maior que o ξ associado ao modo
interárea da Tabela 4.2).
Quanto aos modos locais, estes praticamente não apresentam modificações quando se
altera o modelo do dispositivo (ressalte-se que o STATCOM foi instalado no sistema elétrico
com o propósito de tornar o modo interárea estável). Este fato também pode ser observado na
comparação entre os valores do coeficiente de amortecimento listados nas Tabelas 4.3 e 4.4
(referentes aos STATCOM simplificado e detalhado, respectivamente).
Tabela 4.4: Autovalores Dominantes, Frequência Natural Não Amortecida e
Coeficientes de Amortecimento – STATCOM: Modelo Detalhado (apenas compensação de
reativos)
Autovalores ωωωωn (Hz) ζζζζ
-0,1334 ±1,2013i 0,1924 0,1104 Interárea
-0,2449 ±6,2892i 1,0017 0,0389 Local 1
-0,1506 ±5,8209i 0,9267 0,0259 Local 2
Nas Figuras 4.7, 4.8, 4.9 e 4.10 são mostradas a defasagem angular na máquina 2
referenciada à máquina 1, a defasagem angular na máquina 3 referenciada à máquina 1, a
variação do módulo da tensão na Barra 8 (barra de instalação do STATCOM) e a variação do
fluxo de potência ativa na linha de transmissão entre as Barras 7 e 8, respectivamente, para o
STATCOM representado pelos modelos simplificado e detalhado.

CCaappííttuulloo 44
80
0 5 10 15 20 25 30-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
Tempo (s)
Def
asag
em a
ngul
ar (
rad)
detalhado
simplificado
Figura 4.7: Defasagem Angular (∆δ2 – ∆δ1): STATCOM Simplificado e Detalhado
0 5 10 15 20 25 30-0.16
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Tempo (s)
Def
asag
em a
ngul
ar (
rad)
simplificado
detalhado
Figura 4.8: Defasagem Angular (∆δ3 – ∆δ1): STATCOM Simplificado e Detalhado
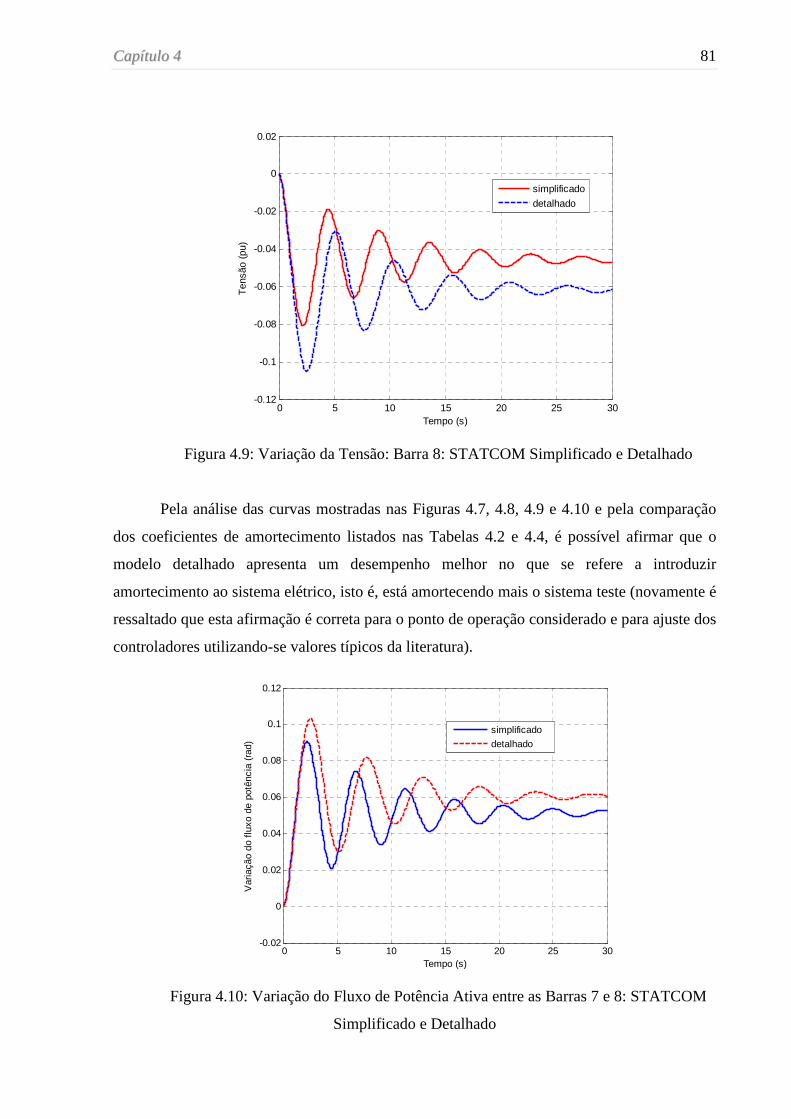
CCaappííttuulloo 44
81
0 5 10 15 20 25 30-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
Tempo (s)
Ten
são
(pu)
simplificado
detalhado
Figura 4.9: Variação da Tensão: Barra 8: STATCOM Simplificado e Detalhado
Pela análise das curvas mostradas nas Figuras 4.7, 4.8, 4.9 e 4.10 e pela comparação
dos coeficientes de amortecimento listados nas Tabelas 4.2 e 4.4, é possível afirmar que o
modelo detalhado apresenta um desempenho melhor no que se refere a introduzir
amortecimento ao sistema elétrico, isto é, está amortecendo mais o sistema teste (novamente é
ressaltado que esta afirmação é correta para o ponto de operação considerado e para ajuste dos
controladores utilizando-se valores típicos da literatura).
0 5 10 15 20 25 30-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Tempo (s)
Var
iaçã
o do
flu
xo d
e po
tênc
ia (
rad)
simplificado
detalhado
Figura 4.10: Variação do Fluxo de Potência Ativa entre as Barras 7 e 8: STATCOM
Simplificado e Detalhado

CCaappííttuulloo 44
82
Para se avaliar a influência da modelagem do dispositivo FACTS STATCOM nos
valores finais de algumas grandezas de interesse, considere a Tabela 4.5 onde são
apresentados os valores de regime permanente do módulo da tensão da barra de instalação do
STATCOM (∆V8), do ângulo interno das máquinas 2 e 3 referidas à máquina 1 (∆δ2-∆δ1 e
(∆δ3-∆δ1, respectivamente) e o fluxo de potência ativa na linha de transmissão entre as Barras
7 e 8 (∆P7-8).
Tabela 4.5: Valores de Regime Permanente: Tensão da Barra 8, Ângulo Interno das
Máquinas e Fluxo de Potência Ativa: STATCOM Simplificado e Detalhado
∆∆∆∆V8 (pu) ∆∆∆∆δ2-∆∆∆∆δ1 (rad) ∆∆∆∆δ3-∆∆∆∆δ1 (rad) ∆∆∆∆P8-8 (pu)
Simplificado -0,0456 -0,0160 -0,0698 0,0512
Detalhado -0,0618 -0,0199 -0,0920 0,0607
Analisando-se os dados apresentados, pode-se concluir que a maneira como o
STATCOM é modelado no sistema elétrico, altera os valores finais das grandezas
consideradas. Além disso, o modelo detalhado fornece maiores desvios de regime para as
grandezas sob estudo que o modelo simplificado (observe que em todas as curvas mostradas,
as referentes ao modelo detalhado estão tendendo para valores maiores de regime permanente,
quando comparados com as curvas referentes ao modelo simplificado).
4.6 Conclusões
Este capítulo apresentou as simulações realizadas em um sistema de potência teste
composto por duas áreas simétricas para se avaliar a influência da modelagem do dispositivo
STACOM na estabilidade a pequenas perturbações. Nas simulações foram consideradas três
situações.
Na primeira situação (chamada de caso base), as simulações realizadas no sistema
teste não incluíram o dispositivo FACTS STATCOM e os resultados mostraram instabilidade
para o ponto de operação considerado.
Na segunda situação avaliada considerou-se a atuação do STATCOM representado
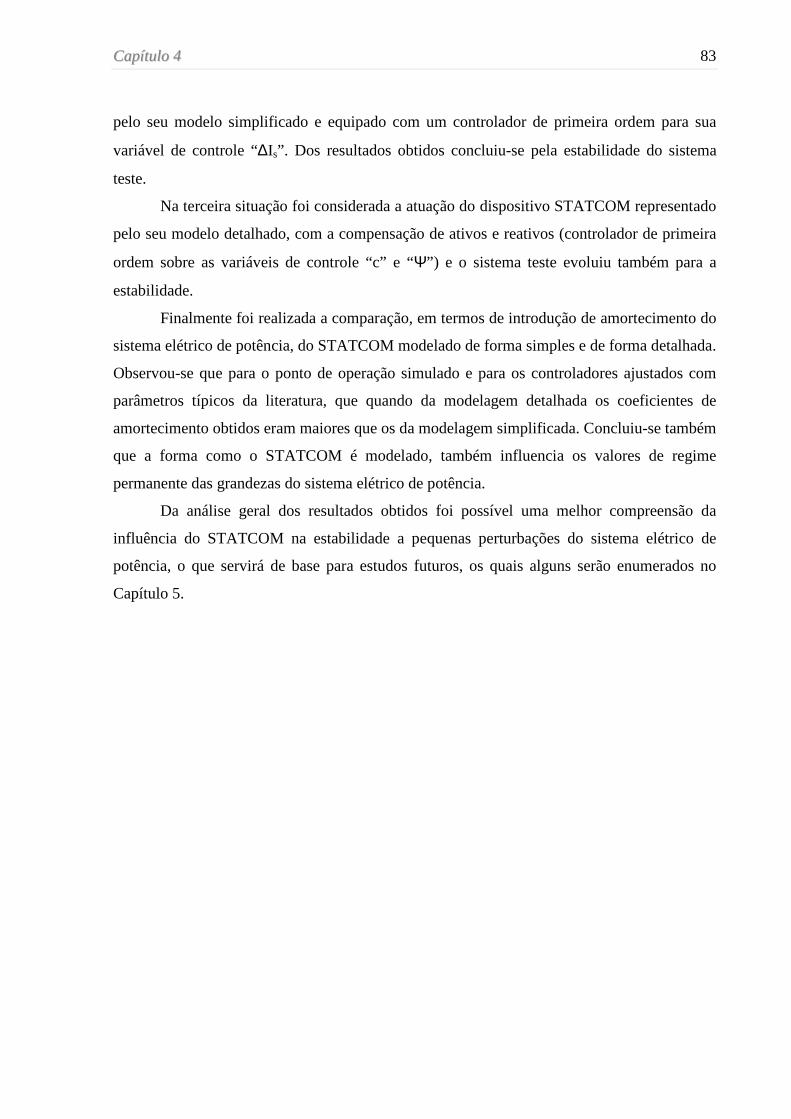
CCaappííttuulloo 44
83
pelo seu modelo simplificado e equipado com um controlador de primeira ordem para sua
variável de controle “∆Is”. Dos resultados obtidos concluiu-se pela estabilidade do sistema
teste.
Na terceira situação foi considerada a atuação do dispositivo STATCOM representado
pelo seu modelo detalhado, com a compensação de ativos e reativos (controlador de primeira
ordem sobre as variáveis de controle “c” e “Ψ”) e o sistema teste evoluiu também para a
estabilidade.
Finalmente foi realizada a comparação, em termos de introdução de amortecimento do
sistema elétrico de potência, do STATCOM modelado de forma simples e de forma detalhada.
Observou-se que para o ponto de operação simulado e para os controladores ajustados com
parâmetros típicos da literatura, que quando da modelagem detalhada os coeficientes de
amortecimento obtidos eram maiores que os da modelagem simplificada. Concluiu-se também
que a forma como o STATCOM é modelado, também influencia os valores de regime
permanente das grandezas do sistema elétrico de potência.
Da análise geral dos resultados obtidos foi possível uma melhor compreensão da
influência do STATCOM na estabilidade a pequenas perturbações do sistema elétrico de
potência, o que servirá de base para estudos futuros, os quais alguns serão enumerados no
Capítulo 5.

CCaappííttuulloo 55
84
Capítulo 5
Conclusões
Este trabalho apresentou dois modelos para o dispositivo FACTS STATCOM: um
chamado de “simplificado” e outro de “detalhado”. Estes modelos diferem tanto no
funcionamento como na composição do dispositivo. Estes modelos foram então utilizados
para se obter resultados preliminares do estudo da estabilidade a pequenas perturbações, o que
permitiu que estes modelos resultassem lineares.
Inicialmente foram apresentados os estudos para a elaboração do Modelo de
Sensibilidade de Potência expandido para o sistema elétrico multimáquinas e foram realizadas
suas representações no domínio do tempo (através de equações diferenciais e equações
algébricas) e no domínio da frequência (através de diagrama de blocos).
Na sequência foi equacionado o dispositivo FACTS STATCOM em sua forma
simplificada. Neste modelo o STATCOM é representado por uma fonte de corrente
controlável ligada em derivação com o sistema elétrico e, por não controlar a fase desta fonte
de corrente, consegue apenas realizar a compensação de potência reativa.
Após a dedução do modelo simplificado, foi modelado um controlador de primeira
ordem para atuação na variável de controle do dispositivo (IS), cujo sinal de entrada escolhido
foi a variação da potência ativa na linha de transmissão entre as barras numa das quais estava
conectado o STATCOM.
De posse deste equacionamento, o MSP-multimáquinas original foi modificado (sendo
a ele acrescidas as equações do modelo simplificado), resultando numa modelagem do
sistema elétrico de potência com a consideração da atuação do dispositivo STATCOM (pelo
menos em sua forma de compensação apenas reativa).
A próxima etapa foi estudar mais o funcionamento e a composição do STATCOM
para se obter o modelo detalhado.
Neste modelo a tensão inserida pelo dispositivo FACTS é controlável em módulo (por
intermédio da variável de controle “c”) e fase (pela variável de controle “Ψ”). Desta forma, o
dispositivo STATCOM pode realizar compensação reativa e também trocar potência ativa
CCaappííttuulloo 55
85
com o sistema elétrico de potência.
Após a obtenção de suas equações linearizadas, foi efetuada a modelagem dos
controladores das variáveis de controle “c” e “Ψ” e estas equações foram agrupadas ao MSP-
multimáquinas original, resultando em um modelo mais completo para o sistema elétrico de
potência.
Na realização destas etapas verificou-se a facilidade de inclusão de novos
componentes do sistema elétrico ao Modelo de Sensibilidade de Potência, pois a cada novo
equipamento a ser acrescentado, novas equações dinâmicas e algébricas são incluídas na
modelagem, porém, sem a necessidade de reformulação das equações anteriormente definidas.
Com os modelos desenvolvidos, estes foram implementados computacionalmente
(utilizando-se o software MatLab®) e foram realizadas simulações em um sistema de potência
exemplo para uma primeira avaliação da estabilidade a pequenas perturbações.
O sistema utilizado foi um simétrico, de duas áreas, bastante utilizado na literatura,
que é instável em seu caso base (entenda por caso base, um ponto de operação instável, sem a
atuação do dispositivo FACTS STATCOM), devido a um modo oscilatório classificado como
“interárea”.
Para tornar o sistema estável, foi colocado em operação o dispositivo STATCOM,
modelado de forma simplificada e forma detalhada, equipado com controladores de primeira
ordem, cujos parâmetros foram adotados a partir de valores usuais encontrados na literatura.
Considerando o modelo simplificado do STATCOM, o sistema de potência teste se
tornou estável com a atuação do dispositivo.
Quando se considerou o modelo detalhado para o dispositivo, igualmente foi obtida a
estabilidade do sistema elétrico de potência.
Os resultados obtidos permitiram a comparação entre os dois modelos estudados e
tornou possível concluir que a modelagem que permite tanto a compensação de reativos como
a de ativos (modelagem detalhada) acrescentou não somente uma versatilidade maior ao
dispositivo como também aumentou sua complexidade e melhorou o desempenho do sistema
elétrico de potência frente às pequenas perturbações, injetando maior quantidade de torque de
amortecimento, quando comparada com a modelagem simplificada.
Deve ser dito que em nenhum dos modelos avaliados foi considerada a otimização ou
a atuação de meios que depurassem os parâmetros dos controladores adicionais para se
fornecer amortecimento ao sistema elétrico de potência.
De maneira geral, os estudos realizados mostraram a viabilidade de se utilizar um

CCaappííttuulloo 55
86
modelo mais sofisticado para o dispositivo STATCOM, mesmo que se torne mais complicada
a realização de simulações, devido a um número maior de variáveis de controle (no modelo
simplificado existe apenas a variável Is, enquanto que no modelo detalhado, ocorrem as
variáveis “c” e “Ψ”.
Como sugestão para trabalhos futuros pode-se citar a utilização de controladores mais
sofisticados (por exemplo, os do tipo POD (Power Oscillation Damping)) para introdução de
amortecimento adicional ao sistema elétrico de potência.
Decorrência imediata da utilização de controladores mais elaborados é o ajuste de seus
parâmetros, de forma a tornar o seu desempenho mais robusto. Para isto poderiam ser
utilizados métodos de otimização e/ou redes neurais combinadas com lógica fuzzy.
Outra frente de estudos seria o ajuste coordenado de parâmetros de controladores do
tipo PSS (Power System Stabilizer) e POD, quando o sistema elétrico de potência estiver
equipado com dispositivos FACTS STATCOM.

RReeffeerrêênncciiaass
87
Referências
ABIDO, M. A. Analysis and assessment of STATCOM-based damping stabilizers for power
system stability enhancement. International Journal of Electric Power and Energy
Systems, London, v. 73, n. 2, p. 177-185, 2005.
ANDERSON, P.; FOUAD, A. A. Power system control and stability. 2.ed. Iowa: Iowa
State University Press, 2003. 568p. (IEEE Power System Engineering Series).
ARAÚJO JUNIOR, R. L.; ARAUJO, P. B. Modelo linear do sistema elétrico de potência com
a inclusão do compensador estático de reativos. In: CONGRESSO BRASILEIRO DE
AUTOMÁTICA, 14., Natal, 2002. Anais... Natal: [s.n.], 2002. p. 2840-2845.
ARAÚJO JUNIOR, R. L.; ARAUJO, P. B. Contribuição do compensador estático de reativos
na formação dos torques de sincronização e amortecimento no sistema de energia elétrica. In:
LATIN-AMERICAN CONGRESS: ELECTRICITY GENERATION AND
TRANSMISSION, 5., São Pedro,2003. Anais… São Pedro: [s.n.], 2003. p.16-20.
BAMASAK, S. M.; ABIDO, M. A. Robust coordinated design of PSS & STATCOM
controllers for damping power system oscillation. In: POWER SYSTEMS
COMPUTATION CONFERENCE, 15., Liege-Bélgica, 2005. Anais... Liege-Bélgica: [s.n.],
2005. p. 22-26.
BRETAS, N. G.; ALBERTO, L. F. C. Estabilidade transitória em sistemas
eletromagnéticos. São Carlos: USP/EESC, 2000. 155p.
CIGRÉ TASK FORCE. Modeling of power electronics equipment (FACTS) in load flow
and stability programs. Paris: Cigré, 1999. 103p.
COLMAN, L. R S.; ARAUJO, P. B. Effects of the thyristor controlled serie capacitor on the
electric power system. In: IEEE/PES TRANSMISSION & DISTRIBUTION CONFERENCE
AND EXPOSITION: LATIN AMÉRICA, 2., São Paulo, 2004. Anais... São Paulo:[s.n.]. p. 1-

RReeffeerrêênncciiaass
88
6.
CHUN, L.; QIRONG J.; XIARONG X.; ZHONGHONG W. Rule-based control for
STATCOM to increase power system stability. In: POWER SYSTEM TECHNOLOGY.
PROCEEDINGS. POWERCON '98 INTERNATIONAL CONFERENCE, 1998.
Proceedings… [S.l.: s.n.], 1998. v.1, p.372-376. Disponível em:
<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=728989&isnumber=15699>.
Acesso em: 25 jun. 2008.
Da COSTA, V. F. Modelo de sensibilidade de potência para análise de oscilações de baixa
frequência em sistemas de energia elétrica. 1992. 110 f. Tese (Doutorado)- Faculdade de
Engenharia Elétrica e de Computação, Universidade Estadual de Campinas- UNICAMP,
1992.
DECKMANN, S. M.; Da COSTA, V. F. Synchronizing and damping torques obtained from a
power sensitivity model. In: COLLOQUIUM OF CIGRÉ STUDY COMMITTEE, 38., 1993,
Florianopolis. Proceedings of the... Florianopolis: UFSC, 1993. p. 361-364.
DECKMANN, S. M.; Da COSTA, V. F. A Power sensitivity model for electromechanical
oscillation studies. IEEE Transactions on Power Systems, New York, v.9, n.2, p. 965-971,
1994.
DeMELLO, F. P.; CONCORDIA, C. Concepts of synchronous machine stability as affected
by excitation control. IEEE Transactions on Power Apparatus and Systems, New York, v.
88, n. 4, p. 316-329, 1969.
FEBRES, C. A.; ARAUJO, P. B.; FURINI, M. A. Damping of low-frequency oscillations by
supplementary control of power system stabilizers. Tendências em Matemática Aplicada e
Computacional - TEMA, São Carlos, v. 9, n. 2, 2008, p.223-232, 2008.
FURINI, M. A. Estudo da estabilidade a pequenas perturbações de sistemas elétricos de
potência multimáquinas sob a ação dos controladores FACTS TCSC e UPFC. 2008. 153
f. Dissertação (Mestrado)- Faculdade de Engenharia, Universidade Estadual Paulista-UNESP,
RReeffeerrêênncciiaass
89
Ilha Solteira, 2008.
FURINI, M. A.; ARAUJO P. B. Melhora da estabilidade dinâmica de sistemas elétricos de
potência multimáquinas usando o dispositivo FACTS thyristor–controlled series capacitor –
TCSC. Revista Controle & Automação, Campinas, v. 19, n. 2, p.214-225, 2008.
GYUGYI, L. Dynamic compensation of AC transmission lines by solid-state synchronous
voltage sources. IEEE Transactions on Power Delivery, New York, v. 9, n. 2, p. 904 – 911,
1994.
GYUGYI, L. The Unified power flow controller – a new approach to power transmission
control. IEEE on Power Delivery, New York, v. 10, n. 2, p. 1085-1097, 1995.
GYUGYI, L. Converter-based FACTS controllers. In: IEE COLLOQUIUM, 1998, London.
Reunião…London: [s.n.],1998. p.1-11.
GYUGYI, L. Power eletronics in electric utilities: static VAR compensator. Proceedings of
IEEE , New York, v.76, n. 4, p. 1- 12, 1988.
HEFFRON, W. G.; PHILLIPS, R. A. Effect of a modern amplidyne voltage regulator on
underexcited operation of large turbine generators. AIEE Trans., New York, v.71, n.1, p.
692–697, 1952.
HINGORANI N. G. High power electronics and flexible AC transmission systems. IEEE
Power Engineering Review, New York, v. 76, n. 4, p. 3-4, 1998.
HINGORANI, N. G.; GYUGYI, L. Understanding FACTS: concepts and technology of
flexible AC transmission systems. New York: IEEE Press- John Wiley, 1999. 452p.
IEEE/CIGRE JOINT TASK FORCE. Definition and classification of power system stability.
ELECTRA , Paris, n. 231, p. 74-80, 2003.
KLEIN M.; ROGERS G. J.; KUNDUR P. A Fundamental study of inter-area oscillation in

RReeffeerrêênncciiaass
90
power systems. IEEE Transactions on Power Systems, New York, v. 6, n. 3, p. 914-921,
1991.
KOBAIASHI, K.; GOTO, M.; WU, K.; YOKOMIZU, Y. Power system stability
improvement by energy storage type STATCOM. In: IEEE POWER TECH CONFERENCE,
2., 2003, Bologna. Proceedings... Bologna:[s.n.], 2003. v. 2, n. 6, p. 23-26.
KUNDUR, P. Power system stability and control eletrical. EUA: MacGraw-Hill, 1994,
1176p. (Power Research Institute).
LARSEN E. V.; SWANN D. A. Applying power system stabilizers, Part I: general concepts,
Part II: performance objectives and tuning concepts, Part III: practical considerations. IEEE
Power Apparatus and Systems, New York, v. PAS-100, n. 12, p. 3017–3046, 1981.
LOPES, F. C. Análise de desempenho de STATCOM quasi 24 pulsos. 2006. 110 f.
Dissertação (Mestrado)- Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de
Engenharia - COPPE, Universidade Federal do Rio de Janeiro- UFRJ, Rio de Janeiro, 2006.
MARTINS, N. Efficient eigenvalue and frequency response methods applied to power
system small-signal stability studies. IEEE Transactions on Power Systems, New York, v.
PWRS-1, n. 1, p. 217-226, 1986.
MARTINS N.; LIMA L. T. G. Determination of suitable locations for power system
stabilizers and static VAR compensators for damping electromechanical oscillations in large
scale power systems. IEEE Transactions on Power Systems, New York, v. 5, n. 4, p. 74–82,
1990.
MATHUR, R. M.; VARMA, R. K. Thyristor based FACTS controllers for electrical
transmission systems. New York: IEEE Press- John Wiley, 2002. 495 p.
MOTA, W. S.; NASCIMENTO, J. A. Projeto de estabilizadores de sistemas de potência por
controle clássico e algoritmos genéticos. In: CONGRESSO BRASILEIRO DE

RReeffeerrêênncciiaass
91
AUTOMÁTICA, 14., 2002, Natal. Anais... Natal: UFRN, 2008. p. 550 – 555.
MOUSSA, H. A. M.; YU, Y. Dynamic interaction of multimachine power system and
excitation control. IEEE Transactions on PAS, New York, v. 93, n. 4, p. 1150 – 1158, 1974.
NASSIF, A. B. Analise da estabilidade de ângulo e de tensão de sistemas elétricos de
potência sujeitos a pequenas perturbações. 2004. 166 f. Dissertação (Mestrado)- Faculdade
de Engenharia Elétrica e de Computação, Universidade Estadual de Campinas-UNICAMP,
Campinas, 2004.
NASSIF, A. B.; CASTRO, M. S.; Da COSTA, V. F.; SILVA, L. C. P. Comparação do PSS,
SVC e STATCOM no amortecimento de oscilações de modo local em sistemas de potência.
In: CONGRESSO BRASILEIRO DE AUTOMÁTICA- CBA, 15., 2004, Gramado. Anais...
Gramado: UFRS, 2004. p. 1-6.
OPERADOR NACIONAL DO SISTEMA ELÉTRICO – ONS. Indicadores de desempenho
do sistema interligado nacional–SIN. [S.l.: s.n., 2008?] 1p. Disponível em:
<http://www.ons.com.br.>. Acesso em: 04 maio 2010.
PEREIRA, A. L. S. Utilização de redes neurais artificiais no ajuste de controladores
suplementares e dispositivo FACTS STATCOM para a melhoria da estabilidade a
pequenas perturbações do sistema elétrico de potência. 2009. 110 f. Tese (Doutorado)-
Faculdade de Engenharia, Universidade Estadual Paulista- UNESP, Ilha Solteira, 2009.
PEREIRA, A. L. S.; ARAUJO, P. B. Contribuição do transformador defasador na formação
dos torques de sincronização e amortecimento no sistema elétrico de potência. In: SIMPÓSIO
BRASILEIRO DE SISTEMAS ELÉTRICOS– SBSE, 1., 2006, Campina Grande. Anais...
Campina Grande: UFPB, 2006. p.1-06.
PEREIRA, A. L. S.; ARAUJO, P. B.; MIASAKI, C. T. Analysis of electric torque in single
Machine-Infinite Bus System Using Phase Shifter. Revista IEEE Latino America, New
York, v. 6, n. 5, 2008, p. 389-394, 2008.
RReeffeerrêênncciiaass
92
PEREIRA, A. L. S.; ARAUJO, P. B.; FURINI, M. A. Utilização de redes neurais artificiais
no amortecimento de oscilações de baixa frequência do sistema elétrico de potência
multimáquinas. In: ENCUENTRO REGIONAL IBERO AMERICANO DE CIGRÉ, 13.,
Puerto Iguazú-Argentina, 2009, Anais… Puerto Iguazú-Argentina: [s.n.], 2009. p. 01-08.
PUPIN, C. E.; PINA, A. P.; ARAUJO, P. B. Atuação do SSSC na estabilidade a pequenas
perturbações de sistemas multimáquinas. IN: CONFERÊNCIA BRASILEIRA SOBRE
QUALIDADE DE ENERGIA ELÉTRICA- CBQEEE, 7., Blumenau, 2009,
Anais…Blumenau:UFSC, 2009. p. 1-6.
RAHIM, A. H. M. A.; KANDLAWALA, M. F. Robust STATCOM voltage controller design
using loop-shaping technique. International Journal of Electric Power and Energy
Systems, London, v. 68, n.1, p. 61-74, 2004.
SAUER, P.W.; PAI, M.A. Power system dynamics and stability. New Jersey: Prentice Hall,
1998. 357p.
SONG Y. H.; JOHNS A. T. Flexible AC transmission system (FACTS). England: The
Institute of Electrical Engineers, TJ International, 1999. 592p.
STAGG, G. W.; El-ABIAD, A. H. Computer methods in power system analysis. New
York: McGraw-Hill, 1982. 427p.
WANG H. F.; SWIFT F. J.; LI M. FACTS-based stabilizer designed by the phase
compensation method Part-I: single-machine infinite-bus power systems. In: ADVANCES
IN POWER SYSTEM CONTROL, OPERATION AND MANAGEMENT- APSCOM, 4.,
Hong Kong, 1997. Proceedings… Hong Kong: [s.n.], 1997. p. 638-643.
WANG H. F.; SWIFT F. J.; LI M. FACTS-based stabilizer designed by the phase
compensation method part-II: multi-machine power systems. In: ADVANCES IN POWER
SYSTEM CONTROL, OPERATION AND MANAGEMENT- APSCOM, 4., Hong
Kong,1997. Proceedings... Hong Kong: [s.n.], 1997. p. 644-649.
WANG H. F.; SWIFT F. J. A Unified model of the analysis of FACTS devices in damping
RReeffeerrêênncciiaass
93
power system oscillations part I: single-machine infinite-bus power systems. IEEE
Transactions on Power Delivery, New York, v. 12, n. 2, p. 941-946, 1998.
WANG H. F.; SWIFT F. J. An Unified model for the analysis of FACTS devices in damping
power system oscillations part II: multi-machine power systems. IEEE Transactions on
Power Delivery, New York, v. 13, n. 4, p. 1355-1362, 1998.
WANG, H. F. Phillips-heffron model of power systems installed with STATCOM and
applications. IEE Proceedings on Generation, Transmission and Distribution , EUA, v.
146, n. 5, p. 521-527, 1999.
WANG, H. F. Applications of damping torque analysis to STATCOM Control. International
Journal of Electric Power and Energy Systems, London, v. 22, n.3 , p.197-204, 2000.
WANG, H. F. Interactions and multivariable design of STATCOM AC and DC voltage
control. International Journal of Electric Power and Energy Systems, London, v. 25, n.5,
p. 387-394, 2003.
WATANABE E. H.; BARBOSA P. G.; ALMEIDA K. C.; TARANTO G. N. Tecnologia
FACTS- tutorial. SBA Controle & Automação, Campinas, v. 9, n. 1, p. 39–55, 1998.
YANG, N.; LIU Q.; MACCALLEY J. D. TCSC Controller design for damping interarea
oscillations. IEEE Transactions on Power Systems, New York, v.13, n.14, p. 1304–1310,
1998.
YU, Y. N. Electric power system dynamic. New York: Academic Press, 1983. 255p.
. ZARRINGHALAMI, M.; GOLKAR, M. A. Analysis of power system linearized model with
STATCOM based damping stabilizer. In: INTERNATIONAL CONFERENCE ON
ELECTRIC UTILITY DEREGULATION AND RESTRUCTURING AND POWER
TECHNOLOGIES, 1., Nanjing, 2008. Proceedings... Nanjing: [s.n.], 2008. p. 2403-2409.
ZIMMERMAN R.; GAN D. MATPOWER – A MATLAB power system simulation

RReeffeerrêênncciiaass
94
package. [S.l.: s.n.], 1997. 1p. Disponível em: <http://www.pserc.cornell.edu/matpower/>.
Acesso em: 05 abr. 2009.
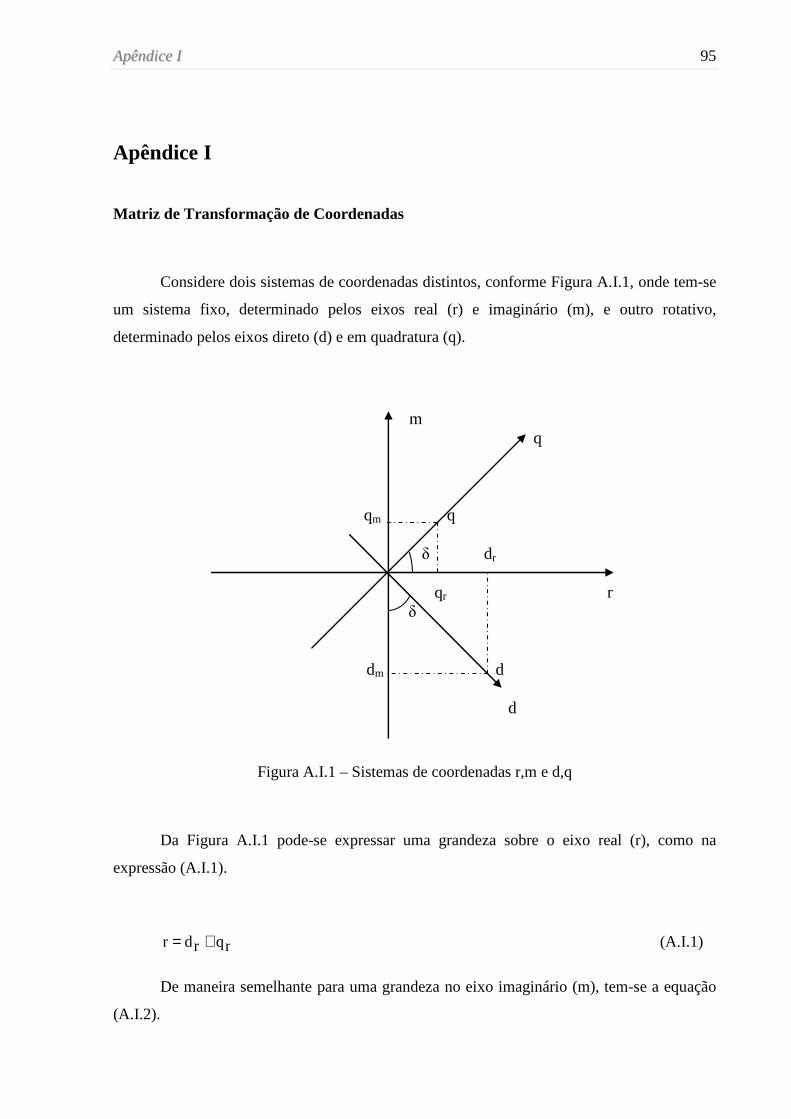
AAppêênnddiiccee II
95
Apêndice I
Matriz de Transformação de Coordenadas
Considere dois sistemas de coordenadas distintos, conforme Figura A.I.1, onde tem-se
um sistema fixo, determinado pelos eixos real (r) e imaginário (m), e outro rotativo,
determinado pelos eixos direto (d) e em quadratura (q).
m q qm q δ dr qr r δ dm d d
Figura A.I.1 – Sistemas de coordenadas r,m e d,q
Da Figura A.I.1 pode-se expressar uma grandeza sobre o eixo real (r), como na
expressão (A.I.1).
rqrdr += (A.I.1)
De maneira semelhante para uma grandeza no eixo imaginário (m), tem-se a equação
(A.I.2).

AAppêênnddiiccee II
96
mqmdm +−= (A.I.2)
Da Figura A.I.1 também podem ser obtidas as relações trigonométricas de interesse,
descritas pelas equações (A.I.3).
d
dsen
dmd
cos
q
qsen
qrq
cos
r
m
=δ
=δ
=δ
=δ
(A.I.3)
Através de substituições pertinentes, pode ser escrito o sistema matricial que
transforma uma grandeza representada no sistema de coordenadas (r,m), para o sistema de
coordenadas (d,q) (equação A.I.4).
=
δδ−δδ
=
−
q
dT
q
d
sencos
cossen
m
r 1 (A.I.4)
De maneira similar, obtém-se a transformada inversa entre os sistemas de coordenadas
(d,q) e (r,m) (equação A.I.5).
=
δδδ−δ
=
m
rT
m
r
sencos
cossen
q
d (A.I.5)
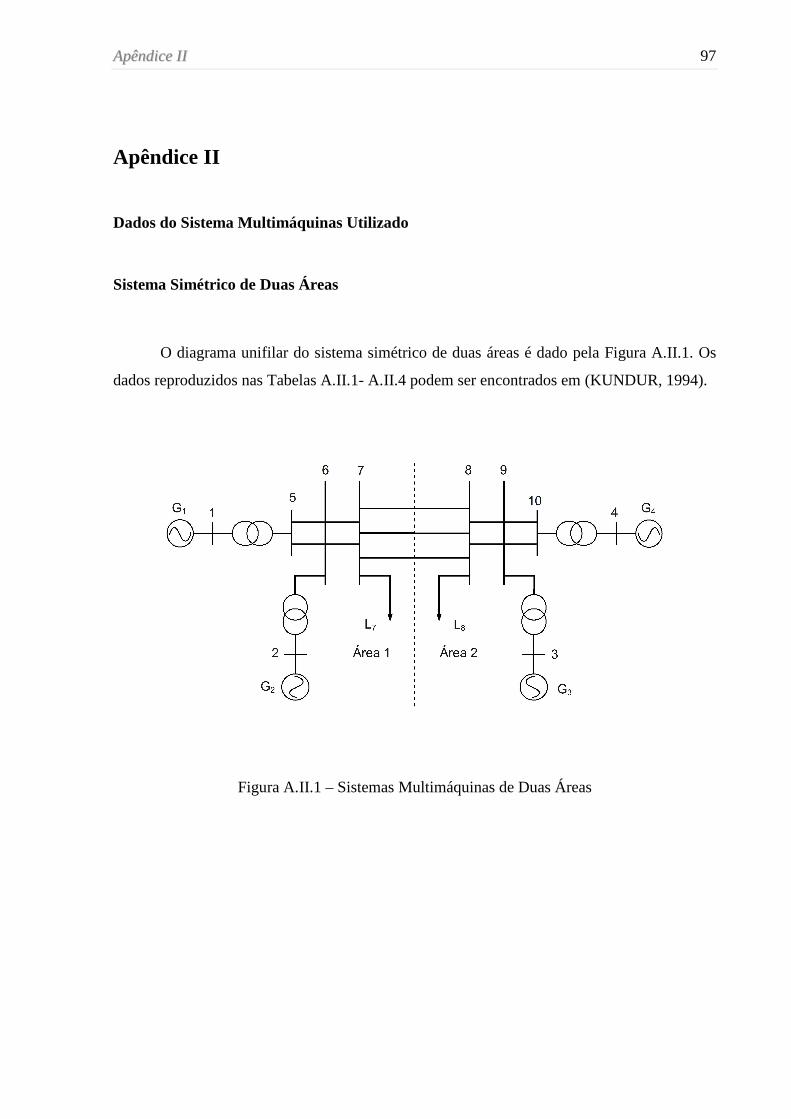
AAppêênnddiiccee II II
97
Apêndice II
Dados do Sistema Multimáquinas Utilizado
Sistema Simétrico de Duas Áreas
O diagrama unifilar do sistema simétrico de duas áreas é dado pela Figura A.II.1. Os
dados reproduzidos nas Tabelas A.II.1- A.II.4 podem ser encontrados em (KUNDUR, 1994).
Figura A.II.1 – Sistemas Multimáquinas de Duas Áreas
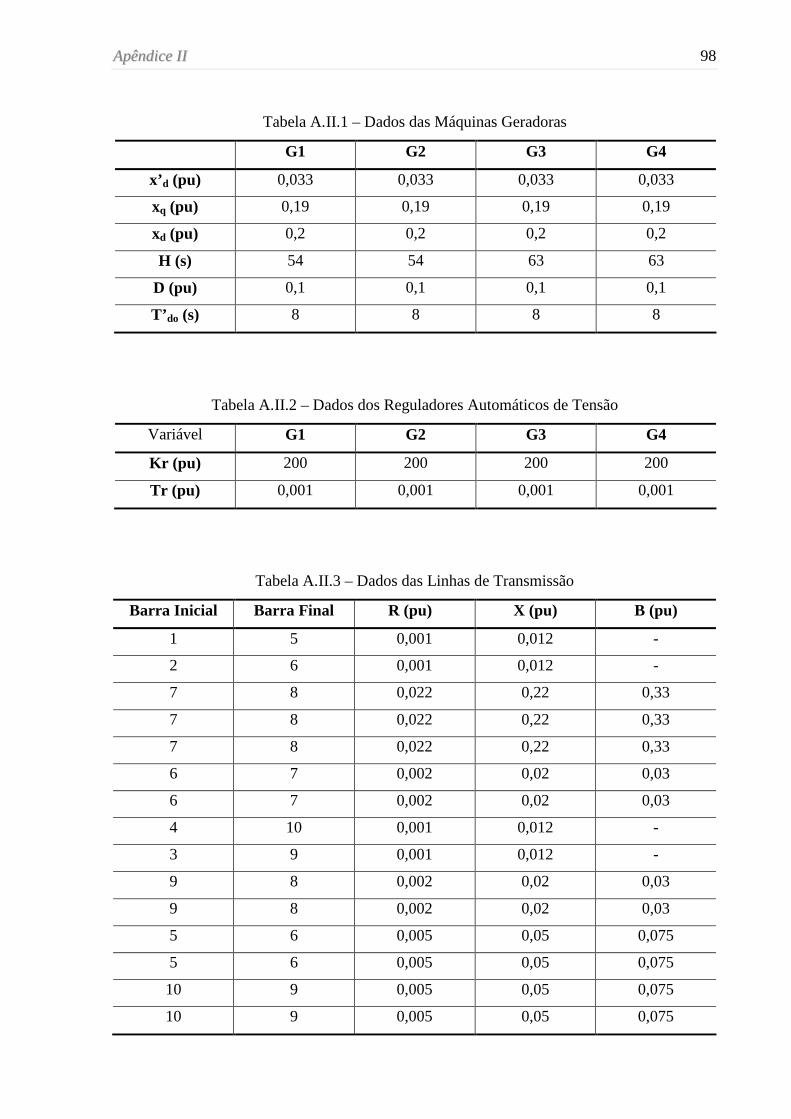
AAppêênnddiiccee II II
98
Tabela A.II.1 – Dados das Máquinas Geradoras
G1 G2 G3 G4
x’d (pu) 0,033 0,033 0,033 0,033
xq (pu) 0,19 0,19 0,19 0,19
xd (pu) 0,2 0,2 0,2 0,2
H (s) 54 54 63 63
D (pu) 0,1 0,1 0,1 0,1
T’ do (s) 8 8 8 8
Tabela A.II.2 – Dados dos Reguladores Automáticos de Tensão
Variável G1 G2 G3 G4
Kr (pu) 200 200 200 200
Tr (pu) 0,001 0,001 0,001 0,001
Tabela A.II.3 – Dados das Linhas de Transmissão
Barra Inicial Barra Final R (pu) X (pu) B (pu)
1 5 0,001 0,012 -
2 6 0,001 0,012 -
7 8 0,022 0,22 0,33
7 8 0,022 0,22 0,33
7 8 0,022 0,22 0,33
6 7 0,002 0,02 0,03
6 7 0,002 0,02 0,03
4 10 0,001 0,012 -
3 9 0,001 0,012 -
9 8 0,002 0,02 0,03
9 8 0,002 0,02 0,03
5 6 0,005 0,05 0,075
5 6 0,005 0,05 0,075
10 9 0,005 0,05 0,075
10 9 0,005 0,05 0,075

AAppêênnddiiccee II II
99
Tabela A.II.4 – Dados das Barras - Caso Base.
Barra V (pu) Ang. (graus) PG (MW) QG (MVAr)
PL (MW) QL
(MVAr)
1 1,0 8,683 700,00 195,97 - -
2 1,0 -2,088 700,00 505,25 - -
3 1,0 -11,92 700,00 601,55 - -
4 1,0 0 743,69 236,08 - -
5 0,973 3,846 - - - -
6 0,936 -6,928 - - - -
7 0,886 -16,16 - - 1159 212
8 0,865 -26,57 - - 1575 288
9 0,924 -16,76 - - - -
10 0,968 -5,149 - - - -
Tabela A.II.5 – Dados dos Controladores.
Is Vs c Ψ Vdc Ccc xsdt Tc Kc Kp Ks K Ψ TΨ
Modelo simplificado
0,5 1,8 - - - - - 200 0,01 1 1 - -
Modelo detalhado
- - 64 10 0,6 1,0 0,9 200 0,01 - - 150 0,01

AAnneexxoo
100
Anexo
Artigos Publicados e Submetido
PUPIN, Carlos Eduardo; PINA, Aline Petean; ARAUJO, Percival Bueno de. Estudo da
Estabilidade a Pequenas Perturbações com a Atuação do Dispositivo FACTS SSSC em
Sistemas Multimáquinas. In: 8TH Brazilian Conference on Dynamics, Control and
Applications (DINCON’09), 2009, Bauru-SP, SP. 2009, p. 1-2, ISBN 978-85-86883-45-3.
PUPIN, Carlos Eduardo; PINA, Aline Petean; ARAUJO, Percival Bueno de. Atuação do
SSSC na Estabilidade a Pequenas Perturbações de Sistemas Multimáquinas. In: VII
Conferência Brasileira sobre Qualidade de Energia Elétrica (VII CBQEEE), Blumenar-SC.
Anais da VII Conferência Brasileira sobre Qualidade de Energia Elétrica (VII CBQEEE)
2009, paper n. 115, p. 01-06. (Cd-rom).
PINA, Aline P.; ARAUJO, Percival B.; MEDINA, Augusto C. R. Small-signal Stability of
Multi-machines Power Systems Using the SSSC FACTS Device. In: REVISTA DE LA
FACULTAD DE MINAS – UNIVERSIDAD NACIONAL DE COLOMBI A, Sede
Medellín, 2010. (Submetido)





























