Embed Size (px)
Citation preview

©
Controle Não Linear
CEFET/RJ Centro Federal de Educação Tecnológica
Celso Suckow da Fonseca Rio de Janeiro
1

© --
Fundamentos da Teoría de Lyapunov
Dadas as características dos sistemas não-lineares características, incluindo a estabilidade, não é possível aplicar os conceitos desenvolvidos em sistemas lineares. Neste capítulo novas ferramentas matemáticas e definições que podem resolver são apresentados este tema. Os conceitos mais importantes estão associados à estabilidade local e global. Sem dúvida, a teoria de Lyapunov apresentado aqui é o desenvolvida para estes casos.
2

© --
Conceitos de Estabilidade. Antecedentes Preliminares. Um sistema naõ-linear puede-ser representado : X(t)= f (x, t) (1) Esta expresão, ainda não contem u, que pode apresentar um sistema onde u = g(x, t), por tanto, a x(t) = f (x,u,t) = f (x,g(x,t),t)
Um sistema é autónomo se (1) não depende do tempo, ou seja,
x(t) = f (x) . A grande diferença entre eles é que um sistema autônomo tem um plano de estados que não é uma função do tempo. Finalmente, um estado Xo é um estado de equilíbrio (ou ponto de equilíbrio) do sistema se fazendo x(t) = xo, este permanece no punto para todo tempo futuro.
3

© --
Estabilidade e Instabilidade • A estabilidade é definida:
Def:. O ponto de equilíbrio Xo = 0 é estável se, para qualquer R> 0, existe um r> 0, de tal modo que satisfaz || X (0) || <r, então || x (t) || <R para todos os t ≥ 0, no caso contrário, o ponto de equilíbrio é estável (estabilidade no sentido de Lyapunov).
4
© --
Estabilidade Asintótica y Estabilidade Exponencial
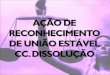
Def: Um ponto de equilíbrio Xo = 0 é assintoticamente estável se ele é estável e se, além disso, há alguns r> 0 tal que || x (0) || <r implica que x (t) → 0 quando t → ∞. Algumas implicações importantes são as seguintes: (a) A esfera Br é conhecida como o domínio de atracção, que corresponde a o lugar de pontos que convergem para a origem, Figura (a) ; (b) um ponto de equilíbrio que é estável, mas não assintoticamente estável é chamado marginalmente estável, Figura (a), Analisando a figura (a) verifica-se que: (i) curva 1: assintoticamente estável, (ii) curva 2: marginalmente estável, e (iii) curva 3: instável; (c) A convergência dos estados não implica estabilidade. Por exemplo, na figura (b), um ponto de partida dentro R = 1 converge para x = 0, mas sempre sai de R = 1, de modo que o origen não é estável no sentido de Lyapunov.
5

© --
• (a) (b)
6

© --
• Def: Um ponto de equilíbrio xo = 0 é exponencialmente estável se existem dois números estritamente positivo α e λ tal que ∀ t> 0, || x (t) || ≤ α || x (0) e-λt || em uma esfera Br em torno da origem .
• Alguns âmbitos são: (a) o número λ positivo é geralmente conhecido como a razão para a convergência exponencial, (b) a estabilidade exponencial implica estabilidade assintótica, mas o inverso não é necessariamente verdade.
7

© --
Estabilidade Local y Estabilidade Global.
• As definições acima são válidas para caracterizar o comportamento de sistemas locais. Ou seja, como o sistema evolui após o início perto do ponto de equilíbrio.
• Def:. Se a estbilidade Assintóticas (ou exponencial) é válida para qualquer condição inicial, o ponto equilíbrio É estável E assintótico (ou exponencial) globalmente.
8

© --
Linearização e estabilidade local. • O método de linearização de Lyapunov refere-se à análise de
estabilidade local. Uma vez que todos sistemas físicos pode ser considerado não linear, em certa medida, este método serve como justificação para a utilização de técnicas lineares em sistemas não-lineares.
• A linearização do sistema, x(t) = f (x,u), y = h(x,u) , en torno a o ponto uo, xo, yo é dada por:
9

© --
• São variaçoes de x,u y em torno a o ponto Xo, Uo, Yo
10

© --
Teorema: Método de Linearização de Lyapunov.
• (A) Se o sistema linearizado é estável (isto é, se todos os valores
próprios de A está no meio esquerda do plano complexo), então o ponto de equilíbrio é assintoticamente estável. (B) Se o sistema linearizado é instável (ou seja, pelo menos um autovalor de A é no meio direita do plano complexo), então o ponto de equilíbrio é instável. (C) Se o sistema linearizado é marginalmente estável (ou seja, todos os valores próprios de A estão no p´lano esquerdo, mas pelo menos um está no eixo jw), então não pode concluir nada sobre o ponto de equilíbrio (de facto, o ponto de equilíbrio pode ser estável, assintoticamente estável ou instável).
11

© --
Exemplo 2.1
Estudar a estabilidade do sistema x´(t) = ax + bx5 a e b São constantes Claramente o ponto de equilíbrio é xo = xo = 0 e a linearização é x´(t) = ax. Se: (i) a <0, então o xo = 0 é assintoticamente estável,
(ii) a> 0, entao o xo = 0 é instável (ii) a = 0, nada pode ser dito; na verdade, o que realmente
acontece depende da constante b.
12

© --
Estabilidade
13

© -- 14

© --
• Estabilidade dos pontos de operaçao do reator
15

© --
• Como pode ser visto, o teorema acima não é suficiente, são várias perguntas sem resposta. Entre os mais importantes são: (a) o que dizer de estabilidade quando as raízes estão em o eixo imaginário? e (b) no caso de ser estável o origen, qual é o domínio de atracção ?.
16

© --
• Exemplo 2.2 . Estudo da estabilidade do ponto de funcionamento do reactor exotérmica.
• R/ A. Para estes fins, são plotados os valores próprios da matriz A para diferentes pontos de operação. Isso é equivalente a traçar o L.G.R. sistema mas, dependendo do ponto de funcionamento. A Fig. Anterior (a) mostra o L.G.R. do reactor. Sem dúvida que, para certos valores de T o sistema apresenta valor próprio instável, de modo que eles têm ponto de funcionamento estável.
• Este é o caso do rango de T entre 335 e 379 ° K. • Deve-se ter cuidado com este tipo de caso em sistemas não-lineares como um
ponto de funcionamento instável pode significar a existência de ciclos limites.
• Este é o caso da faixa mostrada na Figura 2.3 (b) e (c). em que para as entradas entre Tc = 303 e 306 podem ter um único ponto de funcionamento é instável. No entanto, o simulação mostrados na Fig. 1.15 mostra a existência de um ciclo limite para esta entrada. Da mesma forma que as entradas To menor do que 303 sistema de viagem para um único ponto de operação instável.
17

© --
• Simulação reactor exotérmica Tc = 311 · (1 + 0.018u (t-3) - 0.036u (t-6)). A linha sólida representa a simulação do sistema original é segmentado e a simulação do sistema linearizado.
18

© --
Método direito de Lyapunov • Este método é uma extensão natural de uma
observação física fundamental: • Se o total de energia de um sistema é
continuamente dissipada, em seguida, o sistema (linear ou não linear) deve atingir eventualmente um ponto de equilíbrio.
• Uma vez que a energia é um escalar, a análise de estabilidade deve ser reduzida para a análise de uma função escalar.
19

© --
• Por exemplo, a caixa da mola, ilustrada na fig. 1 pode ser aproximada pela equação:
• Para un analise mais rigoroso
• A energia é função da x e x´
• Definase • A equação V(x,x´) pode ser escrita:
20

© --
A expressão acima mostra que: (a) a energia zero corresponde a um ponto de equilíbrio (x1 = 0, x2 = 0), (B) a estabilidade assintótica implica a convergencia da energia a zero, e (c) instabilidade emvolve um crescimento da energia. Além disso, a taxa de variação da energia durante o movimento de sistema é obtido por diferenciação V (x) em relação a t:
21

© --
• V´(x) =-b | x2 |3 • é sempre negativo, o sistema perde energia até V´
(x) = 0 ⇒ x2 = 0. O método direto de Lyapunov é uma generalização do problema anterior. Ouseja, deve-se encontrar uma função energia V(x) tipo energia e analizar a função escalar no tempo.
22

© --
A Funções definidas positivas e função de Lyapunov
• A função de energia V (x) no exemplo acima, cumple com: i) é estritamente positivo (exceto para x1 = 0, x2 = 0) ⇒ função definida é positiva. ii) ⇒ monótona decrescente função de Lyapunov.
• Def:. Uma função escalar V (x) é definida positiva localmente se V (0) = 0 e em uma region Bro cumple-se x ≠ 0 ⇒ V (x)> 0. Se V (0) = 0 e a propriedade anterior cumples-se em todo o espaço estado, emtao V (x) é definida positiva globalmente.
23

© --
Exemplo 2.3 Fig 1.
• Determine-se se são definidas positivas locais ou global:
• (a) es localmente porque para x1 = 2π la función V(x) se faz zero novamente, (b) é globalmente, y (c) não é
24

© --
• (a) definida positiva localmente, (b) definida positiva globalmente, (c) não é definida positiva.
25

© --
• Def:. Uma função V (x) é definida negativa se -V (x) é definida positiva.
• Def:. Uma função V (x) é semi-definida positiva, se V (0) = 0 e V (x) ≥ 0 para x ≠ 0.
• Def.: Una función V (x) es semi-definida negativa si –V (x) es semi-definida positiva.
26

© --
• Semi indica a possibilidade que V(x) seja zero para x ≠ 0 e
• Ou seja, os pontos de equilíbrio também satisfaz v´(x)=0, v´(x) depende só de x
• Um caso especial é quando v´(x) é negativa
27

© --
• Def:. Se em uma region bro a função V (x) é definida positiva e tem derivadas parciais contínuas e sua derivada temporal ao longo das trajetórias dos estados do sistema é semidefinida negativa; ou seja V´(x) ≤ 0, então V (x) é uma função para o sistema de Lyapunov.
28

© --
B Teorema para os pontos de equilibrio
Teorema: Lyapunov Estabilidade Local: Se em uma region Bro, existe uma função escalar V (x) com as primeiras derivadas parciais continuas de modo que: • V (x) é definida positiva (localmente no Bro) • V´(x) é semi-definida negativa (localmente no Bro)
emtao o ponto de equilíbrio xo = 0 é estável. • Se a derivada v´(x) é localmente definida negativa em Bro,
então a estabilidade é assintótica.
29

© --
• Estude a estabilidade para:
O qual tem o ponto de equilíbrio em xo=0 Seja uma função de Lyapunov , então então
• Por tanto como v(x) é globalmente definida positiva, e sua derivada
localmente definida negativa, o ponto x0 é asintoticamente estável.
Figura derivada de Lyapunov Exemplo2.5.
30
Exemplo 2.4

© --
Teorema: Lyapunov para a estabilidade global
• Teorema: Lyapunov para a estabilidade global • Assumir que existe uma função escalar V (x), com
derivada de primer ordem contínua de tal forma que: • V(x) é definida positiva • V´(x) é definida negativa • V(x) inf ||x|| ->inf Então o ponto de equilibrio xo é globalmente asintoticamente estável. Estude a estabilidade do sistema Exemplo 2.6
31

© --
C . Teoremas doss Conjuntos Invariantes.
• No caso de se encontrar V´(x) semi definida, permite concluir respeito a caracteristica asintotica do ponto de equilibrio.
• Teorema: conjuntos invariantes local: Considere um sistema autônomo x´= f (x) com f contínua, e V (x) uma função escalar com primeiras derivadas parciais contínuas. Suponha que:
• Para l>0, a region Ωl defiinida pro V(x) < l delimitada.
• V´(x) ≤ 0 para todo x en Ωl
32

© --
• Seja R um conjunto de pontos dentro Ωl onde V´(x) =0 e M o mais grande conjunto invariante em R, Então, cada solução de x(t) que inicie em Ωi tende a M a medida que t → ∞
• Conjunto invariante Exemplo 2.7 33









![Um Problema Elíptico no RN Assintoticamente Linear e ... · podemos deixar de citar como inspiração o trabalho em [25], devido a Szulkin e Zou, que trata sistemas Hamiltonianos](https://img.document.onl/doc/110x75/5c3647fd09d3f23a308b9ac8/um-problema-eliptico-no-rn-assintoticamente-linear-e-podemos-deixar-de.jpg)