Embed Size (px)
Citation preview

Controle ótimo quadráticoSistemas Lineares
Controle ótimo quadrático
Santa Maria, junho de 2012
Josemar de Oliveira QuevedoLucas Vizzotto Bellinaso
Prof. Dr. Vinícius Montagner

Controle ótimo quadráticoSistemas Lineares
2
Tópicos
• Introdução• Controle ótimo quadrático: equacionamento• Escolha de Q e R• Exemplo de projeto
– Projeto mal feito– Projeto bem feito
• Simulação de um conversor Buck• Conclusões

Controle ótimo quadráticoSistemas Lineares
3
Introdução
• Realimentação de estados:– Obtenção da resposta desejada para o sistema através do cálculo
do ganho K, onde u = R – K x.– Funciona se o sistema for controlável.
• Controle ótimo quadrático:– Técnica empregada para cálculo do ganho K.
u

Controle ótimo quadráticoSistemas Lineares
4
Controle ótimo quadrático Desenvolvimento matemático
• Consiste na minimização de um índice de desempenho quadrático J.
• As matrizes Q e R devem ser Hermitianas e definidas positivamente:– Q = Q’ e R = R’– v’Qv ≥ 0 e v’Rv ≥ 0 , onde v é um vetor como x e u.
• Se o sistema for controlável, a minimização de J sempre torna o sistema estável.
' '
0 0
,J L x u dt x Qx u Ru dt

Controle ótimo quadráticoSistemas Lineares
5
Controle ótimo quadráticoDesenvolvimento matemático
Sendo u = - Kx, pode-se obter:
' ' '
0 0
'J x Qx u Ru dt x Q K RK xdt
' ' ' ' 'd
x Q K RK x x Px x Px x Pxdt
x A BK x
'' ' 'x Q K RK x x A BK P P A BK x
Se houver uma matriz P Hermitiana que:
Do sistema realimentado substitui-se:
O que leva a: ' 'A BK P P A BK Q K RK

Controle ótimo quadráticoSistemas Lineares
6
Controle ótimo quadrático Desenvolvimento matemático
Sendo Q + K’RK sempre positivo, pela segunda Lei de Liapunov, se o sistema for estável, então existe P que satisfaça:
A BK P P A BK Q K RK
Se e separando os termos em K da equação acima:
1 11 ' 0A P PA PBR B P Q TK T B P TK T B P
Pode-se obter que a minimização de J em relação a K requer:
1 1 '0TK T B P K R B P
'R T T

Controle ótimo quadráticoSistemas Lineares
7
Controle ótimo quadrático Desenvolvimento matemático
• O cálculo de K é resumido nas seguintes etapas:– Encontrar P definida positivamente que satisfaça a
equação reduzida de Ricatti:
– Calcular K com a seguinte equação:
' 1 ' 0A P PA PBR B P Q
1 'K R B P

Controle ótimo quadráticoSistemas Lineares
8
Escolha de Q e R
• Matriz Q: – Relativa à importância do erro de cada estado do sistema.– Normalmente definida na forma diagonal, para que a
importância de cada estado seja definida de forma independente.
– Exemplo: q1 refere-se à importância do erro de x1. Quando maior q1, mais rápido será reduzido o erro de x1.
1
2
3
0 0
0 0
0 0
q
Q q
q

Controle ótimo quadráticoSistemas Lineares
9
Escolha de Q e R
• Matriz R: – Relativa à energia necessária para cada entrada.– Normalmente definida na forma diagonal, para que cada entrada
seja tratada independentemente.– Exemplo: r1 refere-se à energia absorvida da entrada u1.
– Quanto maior é r1, menor é a energia absorvida de u1, e mais lento é o controle dependente dessa entrada.
– Quanto menor r1 maiores os ganhos relativos à entrada u1.
1
2
0
0
rR
r

Controle ótimo quadráticoSistemas Lineares
10
Escolha de Q e RComando do Matlab
• Para obter o ganho K no software Matlab, utiliza-se o seguinte comando:
K = lqr(A,B,Q,R) ou K = lqr(sys,Q,R)
• Exemplo:
A = [1 2 ; 3 4];B = [1 ; 0];Q = [10 0; 0 1];R = 1;K = lqr(A,B,Q,R)
Valor de K obtido no Matlab: K = [13.0812 22.4926]

Controle ótimo quadráticoSistemas Lineares
11
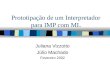
Exemplo de projeto: modelagem do sistema
Figura 1 - Sistema RLC proposto
• R=50Ω;• C=220uF;• L=886μH;• Vc (referência)=50V
uL
C R
iL
vc
L
c
L
c
L
i
vy
u
Li
v
L
CRCi
01
1
0
01
11vc

Controle ótimo quadráticoSistemas Lineares
12
Exemplo de projeto: sistema ampliado
• Sistema aumentado:
Figura 2 – Diagrama de blocos do sistema a ser controlado
Cxrdte
Cxryre
ruL
dte
i
v
L
CRC
dte
Lic
v
L
c
1
0
0
0
1
0
001
001
011
.

Controle ótimo quadráticoSistemas Lineares
13
Exemplo de projeto: controlabilidade
• Controlabilidade:
– Valores numéricos da matriz aumentada
0
7,1128
0
001
007,1128
055,45490
aum
aum
B
A
aumaumaumaumaum BABABC 2
9
93
96
100051,000
107904,5010128,1
104664,01013,50
C

Controle ótimo quadráticoSistemas Lineares
14
Exemplo de projeto: definição de Q e R
• Projeto adequado:– Objetivo: buscar a resposta que alie os menores
ganhos, menor energia de controle e resposta mais rápida do controlador sobre a planta.
• Ganhos: K = [-0,0223 11,1723 -79,0569];• Pólos = [-505 -12195].
800
500000000
01000000
001
R
Q

Controle ótimo quadráticoSistemas Lineares
15
Exemplo de projeto: definição de Q e R
Aaum = [A zeros(2,1);-C 0]; Baum = [B;0];Q = [1 0 0;0 100000 0; 0 0 5000000]; R = [800];Kah = lqr(Aaum,Baum,Q,R)K = Kah(1:2)Kl = -Kah(3); AA = [A-B*K B*Kl;-C 0];BB = [0;0;1]; CC = [C 0]; DD = [0];
t = 0:0.0001:0.12;[y,x,t] = step(AA,BB,CC,DD,1,t);[y2,X,t] = step(A,B,C,D,1,t);x1 = [1 0 0]*x'; x2 = [0 1 0]*x'; x3 = [0 0 1]*x'; subplot(2,2,1); plot(t,x1,'LineWidth',2); gridhold onplot(t,y2,'r');subplot(2,2,2); plot(t,x2,'LineWidth',2); gridsubplot(2,2,3); plot(t,x3,'LineWidth',2); griderro=1-x1;subplot(2,2,4); plot(t,erro);grid
% tensão de saída% corrente% erro integrado

Controle ótimo quadráticoSistemas Lineares
16
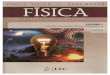
Exemplo de projeto: definição de Q e R
Figura 3 - Resposta do sistema – projeto adequado
0 0.02 0.04 0.06 0.08 0.1 0.120
0.5
1
1.5
2x1 (tensão) versus t
t Sec
x1
x1 (tensão)Vc malha aberta
0 0.02 0.04 0.06 0.08 0.1 0.120
0.005
0.01
0.015
0.02x2 (corrente) versus t
t Sec
x2
0 0.02 0.04 0.06 0.08 0.1 0.120
0.005
0.01
0.015
0.02x3 (erro integrado) versus t
t Sect
x3
0 0.02 0.04 0.06 0.08 0.1 0.120
0.5
1erro
t Sec
erro
Tempo de acomodação: 40 ms

Controle ótimo quadráticoSistemas Lineares
17
Exemplo de projeto: definição de Q e R
Figura 4 – Resposta em frequência do sistema – projeto adequado
-150
-100
-50
0
50
Mag
nitu
de (
dB)
101
102
103
104
105
106
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Sistema em malha abertaSistema controlado

Controle ótimo quadráticoSistemas Lineares
18
Exemplo de projeto: definição de Q e R
• Projeto inadequado:– Atribuir valores à matriz Q que priorizem os estados
menos relevantes para a resposta do sistema. • Valores elevados reduzem o erro em relação à referência, mas
aumentam o esforço de controle.• Valores reduzidos aumentam o erro e diminuem o esforço de
controle;
– Reduzir ou elevar demasiadamente os valores da matriz R;
• A redução resulta em ganhos que tenham magnitude que podem não ser implementáveis na prática;
• O aumento eleva o erro.

Controle ótimo quadráticoSistemas Lineares
19
Exemplo de projeto: definição de Q e R
• Exemplo: priorização dos estados menos relevantes para a resposta do sistema na matriz Q.
– Ganhos: K = [30,3201 15,9441 -3,1623];– Pólos = [-9043,3 + j*8974,3; -9043,3 – j*8974,3]. 1
1000
0100
001000
R
Q
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2x1 (tensão) versus t
t Sec
x1
x1 (tensão)Vc malha aberta
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2x 10
-3 x2 (corrente) versus t
t Sec
x2
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1x3 (erro integrado) versus t
t Sect
x3
0 0.2 0.4 0.6 0.8 10.9
0.92
0.94
0.96
0.98
1erro
t Sec
erro
)

Controle ótimo quadráticoSistemas Lineares
20
Exemplo de projeto: definição de Q e R
Figura 5 – Resposta em frequência - priorização dos estados menos relevantes para a resposta do sistema na matriz Q
-150
-100
-50
0
50
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/sec)10
210
310
410
510
6-180
-135
-90
-45
0
Phas
e (d
eg)
Sistema em malha abertaSistema controlado

Controle ótimo quadráticoSistemas Lineares
21
Exemplo de projeto: definição de Q e R
• Exemplo: Valores muito reduzidos para a matriz R.– Ganhos: K = [38,4 1000,2 -7071,1];– Pólos = [-300; -1,1287*10^6].
1.0
500000000
01000000
001
R
Q
0 0.02 0.04 0.06 0.08 0.1 0.120
0.5
1
1.5
2x1 (tensão) versus t
t Sec
x1
x1 (tensão)Vc malha aberta
0 0.02 0.04 0.06 0.08 0.1 0.120
0.005
0.01
0.015
0.02
0.025
0.03x2 (corrente) versus t
t Sec
x2
0 0.02 0.04 0.06 0.08 0.1 0.120
0.002
0.004
0.006
0.008
0.01x3 (erro integrado) versus t
t Sect
x3
0 0.02 0.04 0.06 0.08 0.1 0.12-0.2
0
0.2
0.4
0.6
0.8
1
erro
t Sec
erro
)

Controle ótimo quadráticoSistemas Lineares
22
Figura 6 – Resposta em frequência – redução excessiva dos valores da matriz R
-200
-150
-100
-50
0
50
Mag
nitu
de (
dB)
101
102
103
104
105
106
107
108
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Sistema em malha abertaSistema controlado

Controle ótimo quadráticoSistemas Lineares
23
Exemplo de projeto: definição de Q e R
• Exemplo: Valores muito elevados para a matriz R.– Ganhos: K = [-0.0118 0.6362 -5 ];– Pólos = [-404,5+j*2229,6; -404,5-j*2229,6].
200000
500000000
01000000
001
R
Q
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2x1 (tensão) versus t
t Sec
x1
x1 (tensão)Vc malha aberta
0 0.2 0.4 0.6 0.8 10
0.005
0.01
0.015
0.02x2 (corrente) versus t
t Sec
x2
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2x3 (erro integrado) versus t
t Sect
x3
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1erro
t Sec
erro
)

Controle ótimo quadráticoSistemas Lineares
24
Exemplo de projeto: definição de Q e R
Figura 7 – Resposta em frequência – aumento excessivo dos valores da matriz R
-80
-60
-40
-20
0
20
40
Mag
nitu
de (
dB)
102
103
104
105
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Sistema em malha abertaSistema controlado

Controle ótimo quadráticoSistemas Lineares
25
Exemplo de projeto: definição de Q e R
• Comparação dos projetos:
Tabela 1 – Comparação das características dos projetos
pólos ganhos p1 p2 k1 k2 klSistema em malha aberta - 4,55 + j*2264,6 -4,55 - j*2264,6 --- --- ---Projeto adequado -505 -12195 -0,0223 11,1723 -79,0569priorização inadequada dos estados em Q -9043,3 +j*8974,3 -9043,3 -j*8974,3 30,3201 15,9441 -3,1623Redução excessiva dos valores de R -300 -1128700 38,4 1000,2 -7071,1
Aumento excessivo dos valores de R -404,5+j*2229,6 -404,5-j*2229,6 -0,0118 0,6362 -5

Controle ótimo quadráticoSistemas Lineares
26
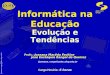
Simulação: conversor Buck
Figura 8 – Conversor buck simulado sob condições nominais

Controle ótimo quadráticoSistemas Lineares
27
Simulação: conversor Buck
• Condições nominais:
Figura 9 – Resposta do conversor operando em malha aberta (vermelho), e com o LQR (azul)

Controle ótimo quadráticoSistemas Lineares
28
Simulação: conversor Buck
Figura 10 – Resposta do erro e erro integrado

Controle ótimo quadráticoSistemas Lineares
29
Simulação: conversor Buck
Figura 11 – Conversor buck simulado com redução de 50% da carga

Controle ótimo quadráticoSistemas Lineares
30
Simulação: conversor Buck
• Redução de 50% da carga:
Figura 12 – Resposta do conversor operando em malha aberta (vermelho), e com o LQR (azul)

Controle ótimo quadráticoSistemas Lineares
31
Simulação: conversor Buck
Figura 13 – Conversor buck simulado com aumento de 100% da carga

Controle ótimo quadráticoSistemas Lineares
32
Simulação: conversor Buck
• Aumento de 100% da carga:
Figura 14 – Resposta do conversor operando em malha aberta (vermelho), e com o LQR (azul)

Controle ótimo quadráticoSistemas Lineares
33
Simulação: conversor Buck
Figura 15 – Conversor buck simulado com variação da referência

Controle ótimo quadráticoSistemas Lineares
34
Simulação: conversor Buck
• Variação da tensão de referência de 50 V para 70 V:
Figura 16 – Resposta do conversor para a variação da referência

Controle ótimo quadráticoSistemas Lineares
35
Simulação: conversor Buck
Figura 17 – Conversor buck alimentado por retificador monofásico

Controle ótimo quadráticoSistemas Lineares
36
Simulação: conversor Buck
• Conversor buck alimentado por retificador monofásico:
Figura 18 – Tensão de saída em azul, tensão de entrada em vermelho. (a) malha fechada (b) malha aberta

Controle ótimo quadráticoSistemas Lineares
37
Conclusões
• O controle LQR oferece uma forma metódica de cálculo dos ganhos de realimentação de estados a partir da minimização de um fator de desempenho quadrático J;
• A resposta do sistema depende dos valores projetados para as matrizes Q e R, as quais determinam a importância relativa do erro e da quantidade de energia necessária no processo de controle, respectivamente;

Controle ótimo quadráticoSistemas Lineares
38
Conclusões
• As matrizes Q e R são definidas empiricamente, portanto, estão sujeitas a diferentes respostas, que serão tão boas quanto maior a faixa de valores testados, permitindo assim definir a configuração que melhor se encaixa para um dado projeto;
• O projeto do controlador aplicado ao conversor Buck visou obter uma resposta que levasse o nível de tensão de saída para o valor desejado com reduzida demanda de energia e rápida resposta dos estados do sistema;

Controle ótimo quadráticoSistemas Lineares
39
Conclusões
• Vantagens do conversor LQR: – Permite a minimização da energia demandada
pelo sistema, resultando em melhor rendimento do sistema de controle;
• Desvantagens do conversor LQR: – Limitação da técnica relacionada à maneira
aleatória de definição dos ganhos do controlador, sendo difícil definir a condição ótima de ganhos.

Controle ótimo quadráticoSistemas Lineares
40
Considerações finais
• Josemar de Oliveira Quevedo:– [email protected]
• Lucas Vizzotto Bellinaso:– [email protected]