-
8/14/2019 Dinmica_-_Unidade_II
1/54
Dinmica das Mquinas - Jos A. Riul
UNIDADE 11
11.1 - Equilbrio Esttico eDinmico em Mecanismos Planospelo mtodo
do Trabalho Virtual
- Mtodo do Trabalho Virtual paraEquilbrio Esttico de
Mecanismos
Considere o deslocamento da
partcula A da figura 1.
A'
A
Fligura 1 - Partcula A
-
8/14/2019 Dinmica_-_Unidade_II
2/54
Dinmica das Mquinas - Jos A. Riul
o trabalho realizado dado por:
!1u = Fl& = (F)( l1r ) cos () ( 1)e, se:
!1u > O; -900 < () < 90
!1u - O; () == +90
!1u < O; 90 < () < 270
(2)
Conforme (2), conclui-se quemuitas foras de um mecanismo oude
uma mquina no realizamtrabalho, como:fora perpendicular
aodeslocamento, oufora aplicada em um vnculo fixo(mancaO, ou
2
-
8/14/2019 Dinmica_-_Unidade_II
3/54
Dinmica das Mquinas - Jos A. Riul
foras de ao e reao entrepeas, dado que se uma produztrabalho
positivo, a outra produzirtrabalho negativo e a soma dosdois
nula.
oMtodo do Trabalho Virtual
utiliza um deslocamento pequenoimaginrio do mecanismochamado de
deslocamento virtual.
O trabalho realizado pelosdeslocamentos virtuais chamadode
trabalho virtual. Se um.mecanismo submetido a ao deforas e
conjugados externos, estestaticamente equilibrado, ento o
3
-
8/14/2019 Dinmica_-_Unidade_II
4/54
Dinmica das Mquinas - Jos A. Riul
trabalho virtual devido aosdeslocamentos virtuais nulo.
Usando a equao (1);
8u = fJF;.8r, + it:.8lJj = O (3)i=l .1=1
onde:- 8u - trabalho virtual (Nm == J);- 8F. - deslocamento
linear virtual
1
da i-sima partcula do j-simo
corpo (m);- 8lJj - deslocamento angularvirtual da j -sima pea do
corpo(rad);
- F;-fora externa atuante na i-
sima !partcula do j-simo docorpo (N);
4
-
8/14/2019 Dinmica_-_Unidade_II
5/54
Dinmica das Mquinas - Jos A. Riul
- T. - tbrque externo atuante na j-Jsima pea do corpo (Nm).
Usa-se!. a equao (3) na anliseesttica de mecanismos.
- Mtodo do Trabalho Virtual paraEquilbrio Dinmico
deMecanismos
Como 'cada deslocamento virtual
ocorre no' mesmo intervalo detempo dt, a equao (3) pode
serdividida por dt, como mostra aequao (4).
5
-
8/14/2019 Dinmica_-_Unidade_II
6/54
-_ ..... ,."~.,~~~.~~-~-,._'''~_._~"' _-.~~--.",..,..-''''''''"'
.-~,_.''''~~.,'''''''," , ... '."',',. . .. . . . ." . . .__. .__.
_,, ..____ ._. _,_~._ .. ,..~~_'_"_~""""'"'=, .. ..~ .. , ,,
~_.,,_, . _,,'""~"""-.-....,,;.
",.;..-.---...,','"~~~_.,._.'"...~~__ ~i . .A: ' _'m . _. _. ~ . _
_ _ "._"'~.~.,,"--
-
8/14/2019 Dinmica_-_Unidade_II
7/54
Dinmica das Mquinas - Jos A. Riul
Comio na anlise dinmica,foras e conjugados de inrciadevem 'ser
considerados, tem-se daequao (4).
11 -->- ~ rn fll -->-
'LF;.V, + 'LT.{+ 'L~.VG +"I 'I J J 'I J J1= j= j="
it:.{ = O}=1 ) }
(5)
centro de
pea do
onde,- ~. - fora de inrcia da j-sima
pea do!mecanismo;- VG. - velocidade do
massa da j-sima imecanIsmo;
7
-
8/14/2019 Dinmica_-_Unidade_II
8/54
. ' ' _' ~_ ~T . ' _' " . . _ ~ , ' ," " _" . '~ " " . ~ . , .~
_ _
-
8/14/2019 Dinmica_-_Unidade_II
9/54
Dinmica das Mquinas - Jos A. Riul
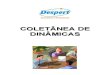
Io3z = 0,1 kgm2, F = 5000 N,() = 30, (), =-22, w2 = 20,Ok,-
w3 == -5,0,Ok, Y:3 = 300,07 + 200J,---- : ~ . --... ---.. ,~ =
-500,Oi, {ter =.900,Oi - 600 j ,'{tB = 900,07, ti] = -800k.
A
G21 1
Figura 2 - Cursor-manivela
As Figuras 3, 4 e 5 mostram o'sDCLs das peas 4,3 e 2.
9
-
8/14/2019 Dinmica_-_Unidade_II
10/54
Figura 3 ~ DCL da pea 4
-....
143
Figura 4 - DCL da pea 3
10
-
8/14/2019 Dinmica_-_Unidade_II
11/54
Dinmica das Mquinas - Jos A. Riul
-.U
Figura 5 - DCL da pea 2
Dos DCLs, observa-se que asforas abaixo no realizam
trabalho.
- W4, F14, F34, F43, F23, F32, W2, F12,FI2, e TI2.
Usando (5), sem levarem considerao as foras acima,tem-se:
11
-
8/14/2019 Dinmica_-_Unidade_II
12/54
Dinmica das Mquinas - Jos A. Riul
F.V + W3Ve + t:.C2 + FI .VB +~ ~ ~ 3 - 4 (l.a)~3 ,v;,3 -h 1;3 ,3
= O
Resolvendo (l.a);
F,VB = (SOOOr).(-soor) =- 2500000Nm / s
W = -m g;~= ~30J~. ~ ,) ~
(1.b)
1f:'V:3 = (-30J).(300r +200J)(1.c)-= -6000Nm / s .
r: .02 = ~TJi).(20k) = 20~ Nm / s(1.d)
12
-
8/14/2019 Dinmica_-_Unidade_II
13/54
Dinmica das Mquinas - Jos A. Riul
~4 .rS =( -m4s)r;: =
(-1800T).(-500T)=900000 Nm/ s(l.e)
(-2700 +1800J).(3001 +200J)
= -450000 Nm / s
( l.f)J:, = -IG,zri3 = -O.l( -800k) = -80k:l .:l
J:3 .(j)3 = ( -80k).(-50k) = 4000 Nm / s(l.g)
SubstitUindo (l.b) (l.g) em (l.a);
1: = 82350k Nm
13
-
8/14/2019 Dinmica_-_Unidade_II
14/54
Dinmica das Mquinas - Jos A. Riul
11.2- Balanceamento Esttico eDinmico de Rotores.
- Introduo
No processo de fabricao deelementos mecnicos, surgemimperfeies,
que so excesso demassa concentrada em pontosdiferentes das p.eas
como mostra a
Figura 6. A massa concentradaquando o rotor entra emmovimento,
gera fora centrfuga(fora de inrcia) e
consequentemente esforo nosmancais de apoio. Obalanceamento
esttico ou
14
-
8/14/2019 Dinmica_-_Unidade_II
15/54
Dinmica das Mquinas - Jos A. Riul
dinmico realizado com oobjetivo de eliminar a ao dasforas
centrfugas.
z
l-b-l- Largura Eixo
BY
I
A
x
y
Figura 6 - Rotor e massas1'\
exc entrlc as
- Balanceamento Esttico de
Rotores (Balanceamento em umnico plano transversal)
15
-
8/14/2019 Dinmica_-_Unidade_II
16/54
Dinmica das Mquinas - Jos A. Riul
o balanceamento dito estticoquando as foras centrfugas estoem um
nico plano transversal; ou. ~ ..se]a, as massas excentrlcas estoem
um nico plano transversal.Este e realizado em rotores de
pequenas larguras.Para realizao do balanceamentoesttico ser
colocada uma massade compensao, no mesmo plano
das massas excntricas, em umaposio radial e angular, de talforma
que sua fora centrfugaeliminar as foras centrfugas
provocadas .. pelas massasexcntricas. Tem-se ento:
16
-
8/14/2019 Dinmica_-_Unidade_II
17/54
t~+F:=O. 1 I=
Dinmica das Mquinas - Jos A. Riul
(6)
(8)
Em (7)~ a fora de inrcia FI (foracentrfuga) s depende daacelerao
normal, porque osrotores giram. .com velocidadeangular:
constante.
P == n1 (()2p == (W / g)m2r =e e e . e
(ai / g)fV.r:
Substituindo (7) e (8) em (6);
17
-
8/14/2019 Dinmica_-_Unidade_II
18/54
Dinmica das Mquinas - Jos A. Riul
(0)2 / g)(IW;~ + ~r:) = O ~i=l (9)n
~Wf+Wr ==O~Wf ==-2:W,L...J 11 ee ee 11i=1 i=l
~ = ( -J a2 + b2 ) / ':
r: = (a/WJT +(b/WJJ ~
()e = tg+(b / a)
(11)
(11.a)
18
-
8/14/2019 Dinmica_-_Unidade_II
19/54
Dinmica das Mquinas - Jos A. Riul
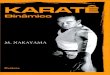
- Balanceamento Dinmico deRotores (Balanceamento em maisde um
plano transversal)
o balanceamento dito dinmicoquando as foras centrfugas estoem
mais de um plano transversal;. " .ou seja, as massas
excentrlcasesto em planos transversaisdistintos, como mostra a
Figura 7.
Este e realizado em ratores degrandes larguras.Para realizao do
balanceamentodinmico sero colocadas massas
de compensao, em no mnimodois planos transversais, emposies
radiais e angulares, de tal
19
-
8/14/2019 Dinmica_-_Unidade_II
20/54
Dinmica das Mquinas - Jos A. Riul
forma queeliminaro
provocadas" .excentrlcas.
suas foras centrfugasas foras centrfugas
. . pelas massas
z
i}CDY....--
-..1"
.. m2-i
_aI
Ib [Largura
Como as lnassas excntricas estoem planos tran.sversais
distintos,
20
-
8/14/2019 Dinmica_-_Unidade_II
21/54
Dinmica das Mquinas - Jos A. Riu!
ento necessrio utilizarequaes de equilbrio de fora ede momento.
Como seroutilizados dois planos debalanceamento; planos A e B,
temse de (9):
n
WF + 'WF == O =>"e L..J 11i=l
n
WAt: + ~r: + L:W;r; = Oi=l(12)
No possvel resolver (12) dadoo nmero de incgnitas ser maiorque o
de equaes. Usando
equao dos momentos em relaoao plano A, tem-se:
21
-
8/14/2019 Dinmica_-_Unidade_II
22/54
- .~--~- -." ~~ - "~"" "''''~
."",""'~""""""""'''"''''''''''''''''',''''''~"". - , . , ,, ,. ; ,
" ", ", "._----, -~ .._.._-:.~~~.
_.__...:-';"-;'.:-.:~",:....::,..~~.~.,~~.~~--,. _.-"-' .- -- -~_.
,-~. __ . '.~-""""=~' "" '~~. '" "~ ;' '' '' '' '. '' '' '' '' ''
'.-=''''-'''''' '''-')~~. '''''''''-''''''-'~~''-''''',.,,,", ...
"'''~~,-.'-.~.~,-
Dinmica das Mquinas - Jos A. Riul
'LMA- O ~(aB+~) X Ws~ +
t((i -+~) X W:~) = O=> (13)i=111
as x Wst: = -:L(i x ~~);=1
De (13), tem-se:
a/i x (WSrBXl + ~rByJ) =
- :L (a.f x (Wr r +Wr ]-;-))=>llX lZV
- ~ (a.Wr )J~+ "(a.Wr )7.J 11 IX L.,.; 1 llY
Resolvendo (14), tem-se:
(14)
22
-
8/14/2019 Dinmica_-_Unidade_II
23/54
Dinmica das Mquinas - Jos A. Riul
y : ~rBX = (- I(ai~rix))/ aB = C](15)
X: ~rBV = (- I(ai~riv))/ aB = C2-
De (15),
W2 ( 2 2) 2 2+rB =C1 + C2 =>Bx y (16)
Para um valor conhecido de rB ,tem-se de (16);
WB = (-JC]2 + c~) / rB (1 7)
Uma vez determinado W B em (17),tem-se oe (15);
23
-
8/14/2019 Dinmica_-_Unidade_II
24/54
Dinmica das Mquinas - Jos A. Riul
Usando (18);
(}B = tg -1 (r By / rBJ (19)
Com isto fica determinada a massade compensao e sua posio no
planoB
do rotor. Para o planoA,
tem-se de (12);n
~4~ = -(~~ + I~~) =i=ln n
- (WBfB + ~ W,)T - (WBrB + ~ WF )]-7~ llX V L...J llVi=l . i=l
.
=dl +cl2J(20)
De (20);
24
-
8/14/2019 Dinmica_-_Unidade_II
25/54
Dinmica das Mquinas - Jos A. Riu!
WA=(-Jd:
+d:)/ rA e de (20)
t: = (dI VWJI + (d2 /WJJ logo,
BA = tg-l(d2 / dJ
(21)Portanto, para ..um dado rA,atravs de (21) obtm-se: W A e
BA
Exemplo 2 - Considere o rotormostrado na Figura 7, faa
seubalance'amento segundo os planosA e B,:considerando: m! == 9,0
kg,m2 == 6~Okg, aI == 20 mm, a2 == 25mm, aB == 90 mm, fI == 30 mm,
f2 ==
50 mm, 81 = 60, 82 = 210 e que25
-
8/14/2019 Dinmica_-_Unidade_II
26/54
Dinmica das Mquinas - Jos A. Riul
as lTIassas de compensao sejamcolocadas nas posies radiais: fA==
20 mm, fB == 20 mm. Determineas massas mAe mB e suas
posiesangulares 8 Ae 8B.
Soluo: De 12);n
W);A + WBrB = -LW:~ (l.a)i=l
e,n
LW:~ - ~fi + W2~ =i=l
(~' cosOI + ~r2 cos02)t + (1.b)
(~' senBI + W2r2 sen02)J
26
-
8/14/2019 Dinmica_-_Unidade_II
27/54
._,_.---,,--_._-"._...--_ ..,. _-,._.~.~~~' .-.,--~~~--
--~".-.~"""""""'==""""~-' ....~-......, ..,.~..~ .-,--
.''''""'''..-'~,.~''~..- -.--_._. __ ._,------,----~~,----
----~~,"._~ _._._ ....~~. _-- .. ~ . ,~ ..,-~,,~-~ . . .
-~,.~-"'''~ ... '" __ .~
Dinmica das Mquinas - Jos A. Riul
(~'i senB1 + W;r2 senB2)J =
(-1248~1)T + (838,3)J(l.c)
De (13);
IAiA -'- O~( a B + rB) x WBrB +
n
I((ai + r;) x ~r;) = o =>i=l
(l.d)
27
-
8/14/2019 Dinmica_-_Unidade_II
28/54
Dinmica das Mquinas - Jos A. Riul
Resolvendo (l.d);
WBrBx == -(alwlflcosBl+a2w2f2cosB2)/aB ==
1576,4 N.mm
(l.e)
WBrBy = -(a1w1fj senOj+a2w2f2sen(2)/aB =
563,7 N.mm
(l.f)De (1.e) e (1.f);
WBrB = J1576,42 + 563,72 = 1674,2 N.mn
(l.h)De (l.h~;
28
-
8/14/2019 Dinmica_-_Unidade_II
29/54
( l.i)
Dinmica das Mquinas - Jos A. Riu/
WB == (1674,2)/rB ==
(1674,2)/20,0 = 83,7 N
De (l.g);
rB = (1576,47 + 563, 7J)IWB => (l.j)(}B = tan~1(563, 7
/1576,4)= 19,7
Substituindo (l.c) e (l.g) em (l.a);
- --328,3i -1402j
De (l.k]);
WArA = ~(-328,3)2 + (-1402)2 = 1440 N.f(I.L)
29
-
8/14/2019 Dinmica_-_Unidade_II
30/54
(l.m)
Dinmica das Mquinas - Jos A. Riul
De (I.L);
WA = (1674,2)/rA =
(1440)/20,0 = 72 N
De (1.1
()A = tan~1(-1402/- 328,3) = 256,8
(l.n)
30
-
8/14/2019 Dinmica_-_Unidade_II
31/54
Dinmica das Mquinas - Jos A. Riul
11.3- Equilbrio Dinmico de umCorpo Rgido no espao
Tridimensional: Princpio deD'Alembert
Considere o corpo rgido mostradona Figura 8.
Corpo Rgido
Figura 8 - Corpo Rgido31
-
8/14/2019 Dinmica_-_Unidade_II
32/54
Dinmica das Mquinas - Jos A. Riul
o Equilbrio Dinmico do CorpoRgido mostrado na Figura 8,
realizado utilizando-se o Princpiode D' Alembert dado pelasequaes
(22) e (23).
n __
IF; =R=Lci==l
(22)
(23)
onde:
F; - foras externas aplicadas aocorpo;
i== 1,2,3,.... ,n;
--+
Lc - \tariao da quantidade demovimento do baricentro do
corpo;
32
-
8/14/2019 Dinmica_-_Unidade_II
33/54
Dinmica das Mquinas - Jos A. Riul. .
:LMe - somatrio dos momentosprovocados pelas foras externas;fi G
- variao do momento
angular. do baricentro do corpo;I - I-sima partcula do corpo;I
== A., B, C, ...., N;G - baricentro do corpo;o - vetor posio da
I-sima
partcula do corpo.
Quando o movimento do corpo no plano (bidimensional) ento,-"-fiG
= IGZiJ) = IGZa = IGZak , pormpara o movimento
tridimensional,deve-se recalcular R G
33
-
8/14/2019 Dinmica_-_Unidade_II
34/54
---,~:~~:.~_,~-:,~:,:'.=:':':~::-_-==~'=:==::-=~":==.==:'~""""'::::"2:::~::==::=~.=:::::::::::::::::=~::::~~
-
8/14/2019 Dinmica_-_Unidade_II
35/54
Dinmica das Mquinas - Jos A. Riul
y
p. (dm)
x
Figura 9 -Corpo Rgido emMovimento de Rotao
O momento angular do corpo emrelao a G, dado por:
35
-
8/14/2019 Dinmica_-_Unidade_II
36/54
- -
,.,., .~.~ " ""~._"'_ "'_~., _" '= __
::::':"':;'~::::'~:':':'::::::'::=: ..
:::=~~=~:=~::':':=""'_'_"""'~':::~::=:"'C0 "" _ _ " ,. _ ' . _ ,.
,. _, ", _" " " ,"'--,,c,"_.,._"-=="-"""-"=--:=
-
8/14/2019 Dinmica_-_Unidade_II
37/54
Dinmica das Mquinas - Jos A. Riul
y(ym - XOJ ) ~ Z(X(07 - zm )Y _ X
fxtJJxf z(zOJy- ymz) - x(YJx - xOJ)
x(XOJz - zOJJ - y(zOJy - YOJJ
(27)Substitilindo (27) em (24), e
separando as componentes doseixos x, y e z, tem-se:
onde:
Hx = OJx f(y2 + z2)dm -OJy Jxydm -{j)z Jxzdm(28)
Hy = -OJx fxydm +OJy f(x2 + z2)dm -OJz fyzdm
(29)Hz = -OJx fxzdm -OJy fyzdm +OJz f(x2 + z2)dm
(30)e de (28, (29) e (30);
37
-
8/14/2019 Dinmica_-_Unidade_II
38/54
Dinmica das Mquinas - Jos A. Riul
H =10] -1 OJ'~I OJ (31)X X xy y xz z
. Hy = -lX),OJx + lyOJy - lyzOJz (32)
Hz = -lixzOJx - I yzOJy + IzOJz (33)
Na forma matricial, tem-se de (31),(32) e (33);
Hx
H -y
H
onde:
I -1 -1x 'xy xz-1 +1 -1
xy y yz
-1 -1 +1xz .yz z
(j)x
Jy
Jz
(35)
38
-
8/14/2019 Dinmica_-_Unidade_II
39/54
-
8/14/2019 Dinmica_-_Unidade_II
40/54
Dinmica das Mquinas - Jos A. Riul
H , == I ,'O) - I , ,OJ I - I I~IOJ_, (36)x' x xy Y x"", L,.
.
Hy' = -lx'y'OJx' + lyOJy' - ly'z'OJz' (37)
e,
ROr'y'=' = HxT + Hy,T + Hz,r (39)
Derivando (39) em relao aotempo; i.
HoX'y'=' - f(T + fIy'j' + fI)i' (40)-'-"-
onde: HGx.y.z. a variao temporal
do momento angular baricntricoem relao ao . sistema
giranteGx'Y'z'.
40
-
8/14/2019 Dinmica_-_Unidade_II
41/54
Dinmica das Mquinas - Jos A. Riul
~
Mas necessita-se obter fIGXY"que
a variao temporal do momentoangula~ baricntrico em relao
aosistema] no girante Gxyz. Sabe-seque: -->- --'"-
Qx~ = Qx'Y'z' +Q x Q'}~ (41)
Fazendo Q = H em (41);--"- --"-
fI =fI +QxRxyz x'y'z' .x:vz
(42)
onde:
R - momento angular em relaoxyz
ao sistema Gxyz, no girante;-->-
fI .- va~iao do momento angularyzem rela,o ao sistema Gxyz;
41
-
8/14/2019 Dinmica_-_Unidade_II
42/54
-
8/14/2019 Dinmica_-_Unidade_II
43/54
Dinmica das Mquinas - Jos A. Riul
Se os eixos X', y'e z', so os eixosprincipais de inrcia do
corpo,ento, Ix'y'= Ix'z'= Iy'z=O e de (36),(37) e (38);
H ==1(0 H =1m H =1mx' x' x" y' y y" z' z' z'
(45).E substituindo (45) em (39);
HGx'y'Z' = HxT + Hy,T + H)i' =
lx,OJxT + (,OJy,T + lz'OJz'k'' .
(46)Derivan~o (46);
--"-
fiGx'y'Z' = (,ax,t + ly,ay,T + lz,a)i'(47)
43
-
8/14/2019 Dinmica_-_Unidade_II
44/54
Dinmica das Mquinas - Jos A. Riul
Exemplo 3 - Um disco fino demassa 1111 = 3,63 kg (Figura 10)
giracom velocidade angular constante002 == 12,0 rad/s, em relao
aobrao IDA, que,. por sua vez, girauniformemente com velocidade
angular: (01 = 4,0 rad/s, em tomo doeixo y!,. Determine o
momentoangular do disco em relao ao seucentro A .
. Soluo: Considere o sistema dereferncia Axyz .fixo . em A,
eparalelo ao sistema fixo Oxyz.Sabe-se que os eixos xyzcorrespondem
aos eixos principaisde inrcia do disco e desta forma,tem-se de
(46):
44
-
8/14/2019 Dinmica_-_Unidade_II
45/54
Dinmica das Mquinas - Jos A. Riul
O,406m---1
Figura 10 - Disco fino
fiA" =Hxl +Hy)+Hzk~ (3.1)
1xJxl + 1yJy) + 1zJ)(
onde:
Ix = Iy = 1/4( mi2,) e Iz = l/2( mr2)45
-
8/14/2019 Dinmica_-_Unidade_II
46/54
Dinmica das Mquinas - Jos A. Riul
{jj ==. WiZ + m J~ + OJ fi =Y z(3.2)
46
-
8/14/2019 Dinmica_-_Unidade_II
47/54
Dinmica das Mquinas - Jos A. Riul
Exemplo 4 Uma hastehomognea delgada AB (Figura11) de massa m e
comprimento 2best soldada em seu ponto mdio aum eixo verticalGD.
Sabendo-seque o eixo gira com velocidade
angular! constante 0), determine obinrio exercido pelo eixo
sobre ahaste AB.
Soluo - Fixando os eixos x', y',z' na haste como mostra a
Figura12, e observando-se que estes soos eixos principais de inrcia
da
haste tem-se de (46):
47
-
8/14/2019 Dinmica_-_Unidade_II
48/54
Dinmica das Mquinas - Jos A. Riul
A
Figura lI-Haste homognea
fiG .. ,. i Hx,t + Hy'j' + Hz,f' =xy~ . (4.1)--'o.. , ' .-... ,
~ ,
lX,OJX,i + ly'OJy.J + lZ,OJZ,kmas,
48
-
8/14/2019 Dinmica_-_Unidade_II
49/54
Dinmica das Mquinas - Jos A. Riul
1 2Ix' = O; Iy' = Iz' = -m(2b) (4.2)12
Jx' == -wsenf3; Wyi = wcos 13; wz' = O(4.3)
Substituindo (4.2) e (4.3) em (4.1);
Z,Z,z'
x,x
Xl
Xl
Figura 12 - Sistemas deReferencias
49
-
8/14/2019 Dinmica_-_Unidade_II
50/54
Dinmica das Mquinas - Jos A. Riul
Em relao ao sistema Gxyz;
FI Gxyz = H Gx'Y'z.senfJT + H Gx.y.z cos fJ](4.5)
x
Xl
Figura [3 - Momento Angular emrelao ao sistema Gxyz
50
-
8/14/2019 Dinmica_-_Unidade_II
51/54
Dinmica das Mquinas - Jos A. Riul
Substituindo (4.4) em (4.5);
FI G =,~ mb2 OJ cos f3senf3T +xyz 3
1 2 ~"3mb OJ, cos f3 cos f3 j
(4.6)
~ ----
Como Gxyz gira com n = OJ j, tem-sede (44):
~ ----. . ~Hc = H G + iJj x H G , (4.7)
llZ ~ nz
onde: GXYZ um sistema dereferencia fixo paralelo a Gxyz'
Osistema Gxyz gira com a haste, logousando (4.6);
51
-
8/14/2019 Dinmica_-_Unidade_II
52/54
Dinmica das Mquinas - Jos A. Riul
~ -- 1 2 -'HG . =HG =-mb Jcosf3senf3i
-"YYZ xyz 3
1 1 ~+3 mb"" J cos f3 cos f3 j .
(4.8)Derivando (4.6) em relao aotempo, considerando )
constante;
~
HG =0xyz
(4.9)
52
-
8/14/2019 Dinmica_-_Unidade_II
53/54
Dinmica das Mquinas - Jos A. Riu!
Ho =-~mb2oi cosfJsenJ3k =>XY2 3
-;- '1 2 2 ---HG =: - - mb OJ sen(2fJ)k (4.10)
XYZ 6 .' . .e,
1 7. 2 ~--mb-w sen(2J3)k6
(4.11)
53
-
8/14/2019 Dinmica_-_Unidade_II
54/54
Dinmica das Mquinas - Jos A. Riul
Lista de Exerccios da Unidade II
Dinmica das Mquinas - "Shigley" - Captulo 16 - 1,2,3, 7, 9 e 10
- Trabalho Virtual
Dinmica das Mquinas - "Mabie" - Captulo 11 - 27, 29 e 30 -
Trabalho Virtual
Dinmica das Mquinas - "Mabie" - Captulo 12 - 1 1O- Balanceamento
de Rotores
Mecnica Vetorial,para Engenheiros - Cinemtica e Dinmica - "Beer"
- Sa (quinta)
edio - Captulo 18 - 1 4,6, 7, 50, 51, 54, 55, 67, 73 79.