Embed Size (px)
DESCRIPTION
Controle e automação é uma das raras áreas do conhecimento que, simultaneamente, apresenta grandes desafios tanto teóricos, quanto práticos. Nas últimas décadas, essa área tem atraído grande atenção tanto na academia, quanto no setor produtivo, gerando muitas demandas por seu conhecimento e experiência. Enfim, hoje não é mais possível desassociar o desenvolvimento científico, tecnológico e industrial da área de Controle e Automação. O alvo a ser atingido na edição dos três primeiros volumes da Enciclopédia de Automática é disponibilizar uma obra que seja verdadeiramente útil para quem, pela primeira vez, deseja estudar um assunto da área de Controle e Automação; para quem desenvolve pesquisa na área e para aqueles que precisam aplicar conceitos e técnicas de Controle e Automação na solução de problemas reais. Assim, a presente obra tem como público-alvo alunos de graduação, alunos de pós-graduação e pesquisadores, bem como profissionais do setor produtivo.
Citation preview




Sumário
Prefácio ..................................................................................................................................7
Apresentação ........................................................................................................................9
I Estimação e fi ltragem ..................................................................................................21
1 Introdução à identifi cação de sistemas dinâmicos ................................................241.1 Objetivos de identifi cação de processos ..........................................................25
1.1.1 Defi nição do problema ..........................................................................251.1.2 Exemplos de aplicações .......................................................................30
1.2 Modelos para sistemas dinâmicos ....................................................................311.2.1 Sinais .....................................................................................................311.2.2 Sistemas e modelos ...............................................................................331.2.3 Modelos não-lineares e modelos lineares ............................................35
1.3 Estimação de parâmetros .................................................................................381.3.1 Modelos em regressão ..........................................................................381.3.2 Exemplos de modelos em regressão ....................................................391.3.3 Erro de predição ...................................................................................421.3.4 Minimização de critérios e algoritmos básicos ....................................42
1.4 Identifi cação determinística .............................................................................491.4.1 Métodos gráfi cos para a resposta ao degrau ........................................491.4.2 Um método numérico para resposta ao degrau ..................................50
1.5 Excitação persistente .......................................................................................511.6 Conclusões ........................................................................................................55
2 Métodos não-paramétricos ........................................................................................562.1 Uma visão global de métodos de identifi cação ................................................562.2 Métodos de identifi cação temporais ................................................................58
2.2.1 Método da resposta ao degrau .............................................................592.2.2 Método da convolução fi nita .................................................................612.2.3 Método das correlações ........................................................................63
2.3 Métodos de identifi cação freqüenciais .............................................................672.3.1 Método da varredura em freqüência ....................................................672.3.2 Método das densidades espectrais .......................................................69
2.4 Estudo de Caso .................................................................................................782.5 Comentários gerais ...........................................................................................81
3 Algoritmos para estimação paramétrica de sistemas lineares .............................843.1 Descrição de sistemas lineares discretos ........................................................85
3.1.1 Família de modelos paramétricos lineares ..........................................863.2 Métodos de identifi cação paramétrica .............................................................88
3.2.1 Estimador dos mínimos quadrados e propriedades ............................883.2.2 Estimador MQ com restrições lineares ................................................923.2.3 Estimador dos mínimos quadrados recursivo .....................................933.2.4 Mínimos quadrados para sistemas variantes no tempo ......................94
3.3 Outros algoritmos recursivos de estimação .....................................................963.3.1 MQ estendido e da máxima verossimilhança .......................................963.3.2 Método da variável instrumental ..........................................................973.3.3 Algoritmos da projeção e da aproximação estocástica .......................98

16 Enciclopédia de Automática
3.3.4 Filtro de Kalman como estimador de sistemas dinâmicos ..................993.4 Estudo de caso em um sistema trocador de calor ........................................1003.5 Conclusão ........................................................................................................103
4 Modelosnão-lineares ................................................................................................1044.1 Estruturas dinâmicas não-lineares .................................................................106
4.1.1 Modelos NARX ....................................................................................1064.1.2 Modelos NARMAX ..............................................................................1064.1.3 Modelos NOE ......................................................................................1074.1.4 Modelos NFIR ......................................................................................1084.1.5 Modelos NOBF ....................................................................................1094.1.6 Modelos Wiener e Hammerstein ........................................................111
4.2 Realizações não-lineares .................................................................................1124.2.1 Modelos polinomiais ...........................................................................1124.2.2 Modelos racionais ................................................................................1144.2.3 Modelos de Volterra ............................................................................1144.2.4 Modelos fuzzy ......................................................................................1164.2.5 Modelos neurais ..................................................................................119
4.3 Conclusões ......................................................................................................121
5 Aspectos práticos de identifi cação de sistemas ...................................................1235.1 Pré-processamento dos dados .......................................................................124
5.1.1 Pré-fi ltragem .......................................................................................1255.1.2 Retirando tendências, sazonalidades, outliers ..................................125
5.2 Escolha do sinal de excitação .........................................................................1275.2.1 Escolha das entradas ..........................................................................1275.2.2 Escolha dos sinais de excitação .........................................................1285.2.3 Escolha do tempo de amostragem .....................................................130
5.3 Implementação numericamente robusta dos algoritmos de estimação .......1315.3.1 Defi nição do problema ........................................................................1325.3.2 O algoritmo de mínimos quadrados ortogonais .................................132
5.4 Determinação da estrutura do modelo ..........................................................1345.4.1 Ordem e estrutura do modelo – complexidade .................................1355.4.2 Métodos de seleção de estrutura .......................................................1375.4.3 Taxa de redução do erro .....................................................................138
5.5 Identifi cação em malha fechada .....................................................................1405.5.1 Um sistema em malha fechada é identifi cável? .................................1415.5.2 Procedimentos para identifi cação em malha fechada .......................142
5.6 Estimação de sistemas variantes no tempo ...................................................1435.7 Métodos de validação do modelo ...................................................................145
5.7.1 Validação estatística ............................................................................1465.7.2 Validação dinâmica .............................................................................149
5.8 Estudo de caso ................................................................................................150
6 Observadores de Estado e Filtro de Kalman .........................................................1586.1 Observadores de Estado .................................................................................158
6.1.1 Introdução ...........................................................................................1586.1.2 Observador de ordem completa .........................................................1596.1.3 Observador de ordem reduzida ..........................................................1616.1.4 Princípio da separação ........................................................................1626.1.5 Observador não-linear ........................................................................164

17SUMÁRIO
6.1.6 Projeto .................................................................................................1666.1.7 Conclusões ..........................................................................................168
6.2 Estimação de estado: Filtro de Kalman .........................................................1686.2.1 Introdução ...........................................................................................1686.2.2 Filtro de Kalman: caso contínuo-discreto ..........................................1696.2.3 Filtro Estendido de Kalman ...............................................................1756.2.4 Procedimentos adaptativos ................................................................1766.2.5 Outros procedimentos e conclusões ..................................................180
7 Filtragem – conceitos e aplicações ........................................................................1827.1 Representação .................................................................................................183
7.1.1 Representação no tempo ....................................................................1837.1.2 Representação na freqüência .............................................................1857.1.3 Representação generalizada ...............................................................1877.1.4 Representação por estados ................................................................188
7.2 Processamento de sinais .................................................................................1897.2.1 Filtragem e equalização ......................................................................1897.2.2 Especifi cação .......................................................................................1897.2.3 Aproximação .......................................................................................1917.2.4 Realização ............................................................................................192
7.3 Filtros digitais .................................................................................................1937.3.1 Aspectos gerais ...................................................................................1937.3.2 Noções de projeto ...............................................................................1957.3.3 Aspectos de implementação ...............................................................1987.3.4 Processamento analógico x processamento digital ...........................201
7.4 Processamento digital de sinais .....................................................................2027.4.1 Amostragem e representação .............................................................2027.4.2 DFT e fi ltragem rápida .......................................................................2047.4.3 Análise espectral .................................................................................206
7.5 Processamento de sinais aleatórios ...............................................................2077.5.1 Caracterização .....................................................................................2087.5.2 Modelos simples de sinais ...................................................................2097.5.3 Aplicação prática ................................................................................210
7.6 Tópicos complementares ................................................................................2117.6.1 Processamento multitaxa ...................................................................2117.6.2 Filtragem adaptativa ...........................................................................214
7.7 Conclusão ........................................................................................................215
II Sistemas inteligentes .................................................................................................216
8 Sistemas inteligentes na automática ......................................................................2198.1 O que é Inteligência Artifi cial? .......................................................................2208.2 Por que IA é importante na área de Automática? .........................................2238.3 Que ferramentas de IA são disponíveis atualmente? ....................................2258.4 Que tópicos correlatos são importantes no desenvolvimento
de Sistemas Inteligentes? ...............................................................................2298.5 Há exemplos reais de Sistemas Inteligentes? ................................................2308.6 Como está a realidade brasileira? ...................................................................234
9 Computação Bioinspirada em Controle de Processos ........................................2379.1 Introdução .......................................................................................................238

18 Enciclopédia de Automática
9.2 Computação digital e computação bioinspirada ............................................2389.3 Bioinspiração e estratégias avançadasde controle de processos .................2409.4 Histórico da computação bioinspirada ...........................................................242
9.4.1 Redes neurais artifi ciais ......................................................................2449.4.2 Computação evolutiva ........................................................................2459.4.3 Inteligência coletiva ............................................................................2479.4.4 Sistemas imunológicos artifi ciais .......................................................248
9.5 Descrição das técnicas ....................................................................................2509.5.1 Técnicas para modelagem de controladores .....................................2509.5.2 Ajuste dos parâmetros dos controladores .........................................255
9.6 Aplicações em controle autônomode robôs móveis ......................................2599.6.1 Estudo de caso: redes neurais artifi ciais ...........................................2629.6.2 Estudo de caso: sistemas imunológicos artifi ciais .............................2659.6.3 Estudo de caso: sistemas classifi cadores com aprendizado .............2689.6.4 Estudo de caso: inteligência coletiva .................................................2729.6.5 Estudo de caso: sistemas homeostáticos artifi ciais ...........................276
9.7 Outros trabalhos na área e a realidade brasileira ..........................................2809.8 Considerações fi nais .......................................................................................281
10 Modelagem e controle nebuloso .............................................................................28310.1 Introdução ..................................................................................................28410.2 Conjuntos nebulosos .................................................................................286
10.2.1 Conceitos básicos ................................................................................28610.2.2 Funções de pertinência ......................................................................28910.2.3 Operações com conjuntos nebulosos .................................................29110.2.4 Propriedades das operações ...............................................................292
10.3 Relações nebulosas ....................................................................................29310.3.1 Composição de relações .....................................................................29510.3.2 Projeção e Extensão Cilíndrica ..........................................................297
10.4 Variáveis lingüísticas .................................................................................29810.4.1 Proposições nebulosas ........................................................................300
10.5 Inferência ...................................................................................................30410.5.1 Conceitos Básicos ...............................................................................30410.5.2 Mecanismos de inferência ..................................................................307
10.6 Sistemas baseados em regras e inferência nebulosa ...............................31010.7 Controle nebuloso com modelo lingüístico ..............................................31310.8 Modelos funcionais ....................................................................................318
10.8.1 Modelos nebulosos Takagi-Sugeno ....................................................31910.8.2 Representação aproximada de sistemas não-lineares com modelos
fuzzy Takagi-Sugeno ...........................................................................32210.9 Conclusões .................................................................................................323
11 Redes neurais em modelagem de sistemas ...........................................................32511.1 Redes neurais e modelagem .....................................................................325
11.1.1 Estrutura da rede neural ....................................................................32611.1.2 Treinamento ........................................................................................32711.1.3 Detalhes do treinamento de redes neurais ........................................32811.1.4 Sistemas com não-linearidades fracas ...............................................328
11.2 Modelos e submodelos híbridos neural-fenomenológicos .......................32911.2.1 Interpretação neural dos modelos fenomenológicos ........................329

19SUMÁRIO
11.2.2 Erro dos blocos ...................................................................................33011.2.3 Análise e correção dos submodelos ...................................................332
11.3 Sistemas dinâmicos ...................................................................................33411.3.1 Sistemas discretos no tempo ..............................................................33411.3.2 Sistemas SISO .....................................................................................33411.3.3 Sistemas dinâmicos .............................................................................33511.3.4 Modelos para sistemas dinâmicos ......................................................33511.3.5 Dimensão dos modelos .......................................................................33711.3.6 Estabilidade e precisão dos modelos .................................................33811.3.7 Preditores e operações em paralelo e em série-paralelo ..................33811.3.8 Detalhes específi cos do treinamento de modelos neurais
para sistemas dinâmicos .....................................................................33911.3.9 Exemplos .............................................................................................341
11.4 Outros trabalhos na área ...........................................................................344
III Robótica ......................................................................................................................345
12 Robôs manipuladores ..............................................................................................34912.1 Manipulador mecânico ..............................................................................35012.2 Cinemática .................................................................................................352
12.2.1 Cinemática de um manipulador robótico ..........................................35212.2.2 Cinemática direta ................................................................................35412.2.3 Espaço das juntas e espaço operacional ............................................356
12.3 Cinemática diferencial ...............................................................................35712.3.1 Jacobiano geométrico .........................................................................35712.3.2 Jacobiano analítico ..............................................................................357
12.4 Controle cinemático ..................................................................................35812.4.1 Controle cinemático de um manipulador robótico ...........................359
12.5 Dinâmica ....................................................................................................36012.6 Controle de movimento de robôs .............................................................361
12.6.1 Controle independente de juntas .......................................................36112.6.2 Controle PD com compensação da gravidade ...................................36312.6.3 Controle PD com torque computado .................................................363
12.7 Controle de força .......................................................................................36512.7.1 Controle de rigidez .............................................................................36512.7.2 Controle de impedância ......................................................................36612.7.3 Controle híbrido posição/força ...........................................................367
12.8 Tópicos especiais .......................................................................................367
13 Robôs móveis ............................................................................................................36913.1 Locomoção .................................................................................................370
13.1.1 Cinemática ...........................................................................................37113.1.2 Controle ...............................................................................................374
13.2 Programação ..............................................................................................37513.2.1 Deliberativo .........................................................................................37513.2.2 Reativo .................................................................................................37513.2.3 Híbrido .................................................................................................376
13.3 Planejamento de caminhos .......................................................................37713.3.1 Espaço de confi gurações ....................................................................37813.3.2 Campos de potencial ...........................................................................37913.3.3 Métodos baseados emgrafos ...............................................................379

20 Enciclopédia de Automática
13.3.4 Localização e mapeamento .................................................................38113.4 Cooperação entre múltiplos robôs ............................................................382
13.4.1 Coordenação .......................................................................................38313.4.2 Navegação ...........................................................................................38313.4.3 Enxames de robôs ...............................................................................38413.5 Conclusão ............................................................................................385
14 Percepção Robótica .................................................................................................38714.1 Sensores comumente usados em robótica ...............................................389
14.1.1 Sensores para robôs manipuladores ..................................................38914.1.2 Sensores para robôs móveis ...............................................................393
14.2 Representação de incertezas ....................................................................40314.3 Integração sensorial ..................................................................................405
14.3.1 Guiagem de sensores ..........................................................................40514.3.2 Fusão sensorial ...................................................................................406
14.4 Tópicos especiais .......................................................................................408
15 Visão robótica ...........................................................................................................41015.1 Formação da imagem ................................................................................411
15.1.1 Câmera de orifício e projeção perspectiva ........................................41115.1.2 Lentes ..................................................................................................41215.1.3 Calibração de sistemas ópticos ..........................................................41315.1.4 Imagens digitais ..................................................................................413
15.2 Processamento de imagens .......................................................................41415.2.1 Filtragem .............................................................................................41415.2.2 Operadores lineares e convolução .....................................................41415.2.3 Detecção de descontinuidades ...........................................................41515.2.4 Segmentação de imagens ...................................................................417
15.3 Recuperação tridimensional empregando visão ......................................41915.3.1 Uso de estereoscopia ..........................................................................42015.3.2 Uso do movimento ..............................................................................421
15.4 Controle baseado em visão .......................................................................42215.5 Visão ativa ..................................................................................................42415.6 Rastreamento visual ..................................................................................42515.7 Visão de máquina .......................................................................................426
Referências Bibliográfi cas ...............................................................................................428
Índice remissivo ................................................................................................................459

Capıtulo 1
Introducao a identificacao desistemas dinamicos
Gustavo Henrique Machado de Arruda
Pericles Rezende Barros
A identificacao de sistemas tem como finalidade obter um modelo matematicoque descreva o comportamento de um sistema dinamico a partir de medicoesdas suas entradas e saıdas. Conhecer um modelo que descreva o comporta-mento de um sistema dinamico e essencial em diversas areas do conhecimento,e e esta necessidade que e responsavel pelo desenvolvimento desta area depesquisa, que tem recebido atencao consideravel nas ultimas decadas.
Neste Capıtulo sao apresentados os objetivos de identificacao de sistemasdinamicos, introduzidos aspectos de modelagem e de estimacao de parametros,apresentada a necessidade de excitacao suficiente e a importancia de validacao.Os conceitos sao ilustrados atraves de modelos simples para a identificacaode sistemas dinamicos contınuos e discretos no tempo, usando informacoesno domınio do tempo, bem como para a identificacao de modelos contınuos,usando informacoes no domınio da frequencia.
Nos Capıtulos seguintes, os aspectos introduzidos aqui sao detalhados.Sao apresentados os metodos nao-parametricos (Capıtulo 2), a identificacaoparametrica usando modelos lineares (Capıtulo 3), a identificacao usando mo-delos nao-lineares (Capıtulo 4) e aspectos praticos de identificacao (Capı-tulo 5). Em seguida, sao apresentados observadores de estado e filtro deKalman (Capıtulo 6) e processamento de sinais (Capıtulo 7).
A literatura existente sobre identificacao de sistemas dinamicos e rica. Oleitor pode encontrar mais detalhes sobre identificacao de sistemas e referenciasbibliograficas em livros como os de Ljung (1999), Eykhof (1974), Soderstrome Stoica (1989), Johansson (1993), Nelles (2001). Em portugues podem sercitados os livros de Aguirre (2004) e de Coelho e Coelho (2004). Aspectos de

28 Enciclopedia de Automatica
Conhecimentoa-priori
Insucesso:revise
Z(N) J
Sucesso: useo modelo
Projeto doexperimento
Estime o modelo
Valide o modelo
DadosEscolha da
estrutura domodelo
Escolha docritério de
desempenho
(θ)
(θ)
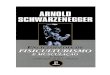
Figura 1.4: Ilustracao do processo de identificacao.
A escolha do modelo depende do tipo do problema, do uso pretendido, dadimensao, da disponibilidade e qualidade dos dados utilizados, restricoes namanipulacao do sistema, restricoes de memoria, modo de operacao (proces-samento em tempo-real ou apos a coleta de dados), experiencia do usuario,disponibilidade de ferramentas e aceitacao do possıvel usuario. Em geral,modelos complexos e que permitam ampliacao e reducao de forma simplessao preferıveis a modelos com estrutura rıgida, a nao ser que haja informacaoa-priori precisa sobre a estrutura do sistema. A representacao dinamica domodelo tambem e guiada fortemente pelo uso pretendido e pela informacao a-priori sobre o sistema. No caso de modelos nao-lineares para sistemas, NARXe NARMAX sao preferidos quando nao existe conhecimento a-priori sobre adinamica do sistema ou quando o uso do modelo requer uma estrutura generica(por exemplo, na predicao e controle), enquanto modelos que incluem maisinfomacoes estruturais do sistemas sao preferidos quando se quer recuperarparametros fısicos ou a aplicacao requer um modelo mais preciso (por exem-plo, na simulacao e otimizacao). Em geral, a ordem do modelo e selecionada apartir da combinacao de conhecimento a-priori, tentativa e erro e avaliacao do

Capıtulo 2
Metodos nao-parametricos
Joao Bosco Ribeiro do Val
Amauri Lopes
Uma classificacao importante dos metodos de identificacao distingue-os emduas categorias basicas: os metodos parametricos e os nao-parametricos. Aprincıpio supoe-se que o sistema e linear, entretanto no primeiro caso conta-secom a adocao de uma famılia especıfica de modelos escolhida previamente,a partir da qual o procedimento de identificacao reduz-se a obtencao do ele-mento na famılia que melhor represente o sistema original. Em outras palavras,quando existem informacoes a priori sobre o sistema em estudo, tais comoprovenientes de leis fısicas que o descrevam, ou relacoes de outra forma, quepermitam distinguir a famılia especıfica de modelos mais adequada, aplica-sea abordagem parametrica. A situacao padrao e quando se sabe que o sistemaem estudo e linear invariante no tempo e, alem disso, ele e descrito por umnumero de polos e zeros conhecido. O problema de identificacao reduz-se en-tao a obtencao dos valores numericos dos parametros que definem o elementomais apropriado da famılia de modelos escolhida para representar o sistema emestudo. Para uma visao dos modelos utilizados em identificacao, vide o Capı-tulo 1; para uma abordagem de modelos parametricos vide o Capıtulo 3 e parauma abordagem de identificacao de sistemas nao-lineares vide o Capıtulo 4.
2.1 Uma visao global de metodos de identificacao
Em muitas situacoes de interesse, esse conhecimento apriorıstico pode naoestar disponıvel e uma escolha erronea da famılia de modelos deve ser evitadapor razoes obvias. Os metodos nao-parametricos aplicam-se nestas circun-stancias, nas quais a unica restricao de modelo que se impoe e que o sistemaem estudo seja linear invariante no tempo, e portanto possa ser caracterizadopor uma funcao de transferencia. Ela entao sera discriminada de maneiras

62 Enciclopedia de Automatica
amostras de entrada u(k)k=−J,...,T e de saıda correspondentes y(k)k=0,...,T .Expressando a relacao basica (2.2) de forma matricial tem-se que⎡
⎢⎢⎢⎣y(0)y(1)
...y(T )
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣u(0) u(−1) · · · u(−J)u(1) u(0) · · · u(−J + 1)
...u(T ) u(T − 1) · · · u(−J + T )
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣h(0)h(1)
...h(J)
⎤⎥⎥⎥⎦+
⎡⎢⎢⎢⎣ε(0)ε(1)
...ε(T )
⎤⎥⎥⎥⎦ (2.3)
ou ainda, numa notacao vetorial, y = Uh + ε. Se T for maior ou igual aoparametro J , esse sistema de equacoes lineares pode ter solucao. O metodonao-parametrico baseado na solucao de (2.3) e denominado metodo da con-volucao finita.
Suponha que se faca T = J e que a matriz U seja inversıvel. Neste caso aestimativa para o vetor h sera o valor h = U−1(y− ε), o que e uma estimativapobre, tanto mais pobre quanto maior for a magnitude dos elementos do vetorde resıduos ε. Por exemplo, se no ensaio a entrada aplicada for como o sinalde impulso discreto de amplitude u, isto e, u(0) = u e u(k) = 0 para k = 0,obter-se-a a matriz U na forma diagonal. A estimativa de cada elemento dovetor h sera h(j) = y(j)/u− ε(j)/u, j = 0, . . . ,J , o que evidencia a influenciasempre presente do ruıdo/resıduo, e a necessidade de se tomar aqui um valorelevado para u para melhorar a relacao sinal/ruıdo.
Quando T > J o sistema de equacoes (2.3) sera sobredeterminado e asolucao exata possivelmente nao ira existir. Entretanto, condizente com oproposito de se obter uma boa estimativa da resposta ao impulso h, deseja-sea melhor das estimativas, tendo-se um criterio de distancia entre os vetores h eo vetor h. Tomando-se como criterio a distancia euclidiana usual entre o vetorde amostras de saıda y observadas e aquelas que seriam produzidas pela con-volucao de h e as amostras de entrada u, deseja-se minimizar ‖y−Uh‖2
2 atravesda escolha de h. O procedimento amplamente conhecido como metodo de mı-nimos quadrados resolve este problema, vide o Capıtulo 3. De fato, supondoque a matriz U ′U seja inversıvel2, podemos desenvolver algebricamente arelacao
‖y − Uh‖22 = (y − Uh)′(y − Uh)
= y′y − y′Uh− h′U ′y + h′U ′Uh
= y′y − y′U [U ′U ]−1[U ′U ]h− h′[U ′U ][U ′U ]−1U ′y + h′[U ′U ]h
= y′y − ([U ′U ]−1U ′y)′)′[U ′U ]([U ′U ]−1U ′y)′)
+ (h− [U ′U ]−1U ′y)′[U ′U ](h− [U ′U ]−1U ′y) (2.4)
Aqui utiliza-se a notacao v′ para indicar o vetor transposto de v. Note que(2.4) e uma funcao quadratica de h, e por construcao, v′[U ′U ]v ≥ 0 para todo
2Como T > J a matriz U e denominada de matriz coluna. Um resultado de algebralinear estabelece que a matriz U ′U sera inversıvel se o posto das linhas de U for igual aJ + 1. Em outras palavras, U precisa ter um numero de linhas linearmente independentesigual ao numero das colunas de U . Todo sinal de entrada u para o qual a matriz U ′U einversıvel, e denominado persistentemente excitante, vide os Capıtulos 1 e 5.

Capıtulo 3
Algoritmos para estimacaoparametrica de sistemaslineares
Antonio Augusto Rodrigues Coelho
A identificacao parametrica consiste na elaboracao de modelos matemati-cos para sistemas dinamicos com base nas variaveis observadas do sistema deacordo com algum criterio predefinido. A analise baseia-se num modelo deregressao linear dado por
y(k) = ϕT (k)θ + v(k), (3.1)
sendo y(k) a saıda, ϕ(k) e θ denominados vetores de medidas e de parametros,respectivamente, e v(k) os ruıdos aditivos. A minimizacao do criterio baseia-seem funcoes custo do erro, isto e,
minθ
12
∑j
∣∣y(j) − ϕT (j)θ∣∣2 ou min
θ
12
∑j
∣∣y(j) − ϕT (j)θ∣∣. (3.2)
O objetivo e determinar um modelo parametrico que descreva um sistema,de estrutura simples e precisa, que se ajuste as medidas com base no erroentre a saıda real e a saıda do modelo no universo das observacoes de dadosdo sistema. O modelo parametrico caracterizado pela equacao (3.1) nao sodireciona-se para equacoes a diferencas lineares, isto e, sistemas representadosno instante discreto k com os sinais medidos em um numero finito de pon-tos e coletadas em instantes de tempo de amostragem regulares, mas tambempara os algoritmos de estimacao recursivos adaptados a implementacao com-putacional digital. Por outro lado, as aplicacoes dos modelos enquadram-se,por exemplo, na descricao, interpretacao, diagnostico, simulacao, predicao,

Cap. 3 Algoritmos para estimacao parametrica... 101
Tsat
Tin,Q
Tout
vaporsaturado
entradade líquido
saída delíquido
Tem
pera
tura
de s
aíd
a (
0C)
Ts=1s N(y;σ )=(96,94;2,8)2
y
0 10 20 30 40 50 60 70
102
101
100
99
98
97
96
95
94
93
92
0
50
100
150
200
250
300
Pontonominal
N=4000 amostras
Taxa
de f
luxo
(m
/s)
Tempo (min)
Pontonominal
Ts=1s N(u;σ )=(0,369;0,026)2
u
0 10 20 30 40 50 60 70
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
50
100
150
200
250
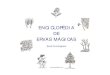
(a) Esquematico do trocador. (b) Dados de saıda e entrada da planta.
Figura 3.3: Trocador de calor de vapor saturado (Bittanti e Piroddi, 1997).
Tabela 3.2: Avaliacao da estimacao parametrica do trocador de calor.
Algoritmo na nb nc CCMMQRE 6 3 1 0,6051
VI 6 3 0 0,4477MQR 6 3 0 0,3843
De acordo com os resultados da Tabela 3.2 o estimador MQRE conduzao maior coeficiente de correlacao multipla entre os algoritmos de estimacaoavaliados (quanto mais proxima de 1 (um) melhor e a adequacao do modeloestimado). A Figura 3.4 ilustra o sinal da temperatura de saıda do lıquido me-dido (real) e o sinal de saıda estimado do algoritmo MQRE com o acrescimo dopolinomio C(q) que insere as perturbacoes no modelo, neste caso a perturbacaoe/ou o ruıdo dos sinais medidos (informacoes adicionais sobre a validacao demodelos podem ser obtidas no Capıtulo 5 desta obra).
A equacao a diferencas correspondente ao modelo matematico estimadolinear do trocador de calor, com o metodo MQRE, e dada por

Capıtulo 4
Modelos nao-lineares
Ricardo Jose Gabrielli Barreto Campello
Gustavo Henrique da Costa Oliveira
A representacao de sistemas dinamicos atraves de modelos matematicosesta presente em diversas areas do conhecimento, em especial da engenharia,o que se deve a necessidade de reproducao ou de analise de fenomenos rela-cionados com o sistema que sao de interesse em um determinado problema(Ljung, 1999; Aguirre, 2004). Razoes para tanto, frequentemente apontadasna literatura, sao de ordem financeira, de seguranca ou para a previsao do com-portamento transitorio e em regime permanente de determinado sistema antesde sua construcao ou operacao. Modelos matematicos sao tambem utilizadoscomo base para o projeto de diversos algoritmos de controle de processos.
Neste sentido, uma importante classificacao de modelos matematicos parasistemas dinamicos esta baseada no conceito de linearidade. Modelos linearessao, sem duvida, a classe de modelos mais utilizada na pratica e melhor esta-belecida na literatura (vide Parte I, do volume II desta obra). Esta classe econstituıda de modelos com estrutura simples, cuja obtencao e implementacaosao mais faceis com relacao a classe dos modelos nao-lineares. Alem disso,a teoria para projeto de algoritmos de controle baseada em modelos linearesesta melhor estabelecida e leva, na maioria dos casos, a malhas de controletambem lineares cujos metodos de analise de desempenho e estabilidade saobem conhecidos e fundamentados (vide Parte II, do volume I desta obra). En-tretanto, a maioria dos sistemas reais sao, em algum grau, nao-lineares, o querequer aproximacoes e/ou restricoes relativas a regiao de validade do modelolinear para sua correta utilizacao. Porem, existem situacoes onde a utiliza-cao de modelos lineares nao apresenta resultados satisfatorios, por exemplo,devido a complexidade das dinamicas envolvidas ou pela necessidade de umaboa fidelidade do modelo em uma ampla faixa de operacao do sistema. Nestescasos, modelos nao-lineares devem ser utilizados.

Cap. 4 Modelos nao-lineares 119
4.2.5 Modelos neurais
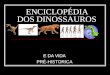
Redes Neurais Artificiais (RNAs) sao modelos matematicos que, inspiradosna estrutura do sistema nervoso humano, sao compostos de unidades de pro-cessamento simples (neuronios artificiais) interligadas por um grande numerode conexoes (Braga, Ludemir e Carvalho, 2000). A ideia mais usual para autilizacao de RNAs na modelagem de sistemas dinamicos e fundamentalmentea mesma daquela apresentada para o caso de modelos fuzzy, isto e, a represen-tacao do mapeamento nao-linear estatico H em (4.1). A razao e que tanto osmodelos fuzzy como as RNAs podem ser configurados como aproximadores uni-versais, isto e, modelos capazes de aproximar com precisao arbitraria qualquermapeamento contınuo definido sobre um domınio compacto (Kosko, 1992).Nesse tipo de abordagem, a parte dinamica fica entao externa ao modelo, istoe, limita-se a construcao do vetor de regressores ϕ − cujos elementos seraoas entradas para a rede − segundo uma das topologias discutidas da Secao4.1.1 ate a Secao 4.1.5. Nesse tipo de aplicacao, como as RNAs limitam-se arepresentacao de mapeamentos estaticos, as arquiteturas utilizadas resumem-se essencialmente aquelas do tipo feedforward, que sao redes estaticas semqualquer tipo de recursao interna. As duas arquiteturas feedforward maisdifundidas sao as redes RBF (Radial Basis Functions) e MLP (Multi-LayerPerceptron) (Kovacs, 1996; Haykin, 2001; Braga et al., 2000).
A arquitetura basica de uma rede RBF e ilustrada na Figura 4.4. Essa redee descrita por uma soma ponderada de M funcoes de base radial hi(x) (i =1, · · · ,M) do vetor de entradas x = [x1 · · · xn]T . A ponderacao e determinadapelo vetor de pesos sinapticos w = [w1 · · · wn]T , de tal forma que a saıda edada pelo produto interno y = wTh(x), onde h(x) = [h1(x) · · · hM (x)]T .
Σy
h1
h2
hM
x1
xn
w1
w2
wM
^
Figura 4.4: Rede neural RBF com multiplas entradas e uma saıda.
Possivelmente, a forma mais usual de funcao de base radial e a Gaussiana,ou seja:
hi(x) = exp(− (x − ci)
T Λ−1i (x − ci))
)(4.29)

Capıtulo 5
Aspectos praticos deidentificacao de sistemas
Eduardo Mazoni Andrade Marcal Mendes
Com a introducao do termo “Identificacao” em 1955 por Zadeh no intuitode englobar todos os problemas de determinacao das relacoes entrada-saıdado tipo caixa-preta por meios de experimentos, houve um grande interesse dacomunidade de Controle para o avanco de tecnicas que possibitassem a mode-lagem de sistemas encontrados na pratica. A vasta literatura em identificacaode sistemas lineares demonstra que as tecnicas desenvolvidas foram bem suce-didas em diversos problemas nas mais diversas areas. Entretanto, tais tecnicas,baseadas no conceito de linearidade, tem sua abrangencia limitada, uma vezque ha necessidade de se modelar sistemas complexos, tais como aqueles en-contrados em Biologia e Economia. Com o surgimento de computadores cadamais rapidos e capazes de armazenar grandes quantidades de dados, tecnicaspara modelagem de sistemas nao-lineares tem sido cada vez mais utilizadas.
O uso destas tecnicas esta ligado a finalidade para a qual o modelo aser identificado atendera. Independemente da tecnica, alguns aspectos saocomuns:
1. Escolha da estrutura (e representacao) do modelo;
2. Estimacao dos parametros do modelo contido na estrutura escolhida;
3. Qualidade do modelo obtido.
Com os fundamentos teoricos abordados nos capıtulos desta obra, discutem-se, aqui, os aspectos praticos que o usuario de tecnicas de identificacao ira sedeparar ao utilizar um determinado metodo, algoritmo ou tecnica de iden-tificacao e, consequentemente, de estimacao de parametros para resolver umproblema de identificacao de um sistema real. Um dos aspectos importantes

Cap. 5 Aspectos praticos de identificacao de sistemas 147
onde δ(τ) e o impulso unitario, ξ(t) e u(t) sao a sequencia de resıduos e entrada,respectivamente. A barra sobre as quantidades significa que o valor mediofoi determinado e E[•] e a esperanca matematica. Estes testes podem serestendidos para sistemas nao-lineares multi-entradas e multi-saıdas (Billingset al., 1989)
Φξiξj (τ) = δ(τ) i = 1, . . . Ny e j = i, . . . Ny
Φuiξj (τ) = 0, ∀τ, i = 1, . . . Nu e j = 1, . . . , Ny
Φ(uiuj)′ξk(τ) = 0, ∀τ, i = 1, . . . Nu ; j = i, . . . , Nu e k = 1, . . . , Ny
Φ(uiuj)′ξkξl(τ) = 0, ∀τ, i = 1, . . . Nu ; j = i, . . . , Nu ;
k = 1, . . . , Ny e l = k, . . . , Ny
Φ(ξi)(ξjuk)(τ) = 0, τ ≥ 0 i = 1, . . . , Ny ; j = i, . . . , Ny e k = 1, . . . , Nu
(5.35)onde Ny e Nu sao o numero de entradas e saıdas respectivamente. Quando naoha dados de entrada disponıveis (ou seja, um problema de series temporais),os seguintes testes de correlacao devem ser usados (Billings e Tao, 1991)
Φξ′ξ′(τ) = E[(ξ(t) − ξ(t))(ξ(t− τ) − ξ(t))] = δ(τ),Φξ′(ξ2′)(τ) = E[(ξ(t) − ξ(t))(ξ2(t− τ) − ξ2(t))] = 0,Φξ2′ξ2′ (τ) = E[(ξ2(t) − ξ2(t))(ξ2(t− τ) − ξ2(t))] = δ(τ)
(5.36)
Billings e Zhu (1994b) elaboraram mais dois testes de correlacao para au-mentar o poder dos testes listados acima. Diferentemente dos testes descritos,estes dois testes utilizam dados de saıda e sao dados pelas seguintes expressoes
Φ(yξ)′ξ2′ (τ) = E[(yξ(t) − yξ(t))(ξ2(t− τ) − ξ2(t))] = kξ δ(τ),Φ(yξ)(u2′)(τ) = E[(yξ(t) − yξ(t))(u2(t− τ) − u2(t))] = kξ δ(τ)
(5.37)onde a constante kξ e definida em (Billings e Zhu, 1994b).
A ideia por tras dos testes de correlacao, equacoes (5.34), (5.35), (5.36)e (5.37) e que, para que o modelo seja estatisticamente valido, nao existainformacao que possa ser predita nos resıduos. Como na pratica o numero dedados entrada-saıda e limitado, e preciso utilizar os limites de confianca paramostrar se a correlacao entre as variaveis e ou nao significante. Para valoreselevados do numero N de dados, os limites de confianca de 95% sao ± 1.96√
Naproximadamente e qualquer correlacao significante sera indicada por um oumais pontos fora destes limites.
No caso da identificacao de modelos lineares, as funcoes de correlacao teminterpretacoes bem interessantes. Por exemplo:
• se existe correlacao entre ξ(t) e u(t− τ) para pequenos valores de τ , issopode indicar que o atraso puro de tempo estimado para o modelo foi naoadequado (muito grande);

Capıtulo 6
Observadores de Estado eFiltro de Kalman
Atair Rios Neto
Elder Moreira Hemerly
Neste capıtulo e tratado problema de reconstituicao de estado de sistemasdinamicos, tanto para o caso determinıstico, isto e, o caso de observadores deestado, como para o estocastico, isto e, o caso de estimacao de estado. Saodesenvolvidas solucoes para as situacoes de sistemas lineares e nao-lineares,assim como abordagens adaptativas para evitar o problema de divergencia nocaso de erros de modelagem.
Os desenvolvimentos teoricos sao em um nıvel mınimo necessario, comenfase na apresentacao de resultados e orientacao para uso pratico. E efetuadoum esforco de se registrar o estado da arte, incluindo tambem indicacoes deoutras aplicacoes no caso de filtragem de Kalman, tais como otimizacao defuncoes sujeita a vınculos com erros; solucao sequencial de sistemas de equacoesalgebricas; solucao em paralelo de sistemas de equacoes algebricas; treinamentode redes neurais; e controle preditivo.
6.1 Observadores de Estado
6.1.1 Introducao
Observadores sao estimadores de estado para sistemas determinısticos, istoe, sistemas sem ruıdos de processo e de medidas significativos. Para detalhessobre a representacao por variaveis de estado, consulte o Capıtulo 2 do vo-lume II, desta obra. Originalmente introduzidos por (Luenberger, 1966), osobservadores de estado possuem diversas aplicacoes praticas, sendo monitora-mento, controle e deteccao de falhas as principais. Basicamente, sao empre-gados para obter uma estimativa x do vetor de estado verdadeiro x a partir

176 Enciclopedia de Automatica
ou, adotando-se uma notacao mais compacta, fx(x(t),t) = F (t), hx(x(ti),ti) =H(ti):
δx = F (t)δx+G(t)w(t), δy(ti) = H(ti)δx(ti) + v(ti) (6.66)
Com estas aproximacoes de modelagem, recai-se na situacao do Filtro deKalman, onde agora o que se estima sao as realizacoes do processo das variacoesde primeira ordem do estado, condicionadas as realizacoes das variacoes deprimeira ordem do processo de observacoes, de modo que:
x(ti) = x(ti) + δx(ti) (6.67)
Na pratica, duas situacoes sao consideradas. Quando x(t) e preestabelecida emantida, tem-se o caso do chamado Filtro Linearizado de Kalman. Quando:
˙x(t) = f(x(t),t), x(t+i ) = x(ti), t+i ≤ t ≤ ti+1 (6.68)
tem-se o chamado Filtro Estendido de Kalman, com o correspondente algo-ritmo resumido na Tabela 6.2.
Tabela 6.2: Filtro estendido de Kalman.
Atualizacao: para i =0, 1, 2, ..., usam-se a esti-mativa a priori, x(ti) eP (ti), e a ocorrencia daobservacao da saıda do sis-tema dinamico, y(ti), paraatualizar a estimativa.
K(ti)= P (ti)HT(ti)[H(ti)P (ti)H
T(ti)+R(ti)]−1
x(ti) = x(ti) +K(ti)[y(ti) − h(x(ti),ti)]P (ti) = P (ti) −K(ti)H(ti)P (ti)
= [In−K(ti)H(ti)]P (ti)[In−K(ti)H(ti)]T
+K(ti)R(ti)KT (ti)
H(ti) = hx(x(ti)ti)Previsao: para i =1, 2, ..., geram-se numeri-camente as estimativas apriori, a partir da propa-gacao dinamica das esti-mativas em ti−1.
˙P = PF T (t) + F (t)P +G(t)Q(t)GT (t);P (t+i−1) = P (ti−1)˙x(t) = f(x(t),t), x(t+i−1) = x(ti−1),t+i−1 ≤ t ≤ tiF (t) = fx(x(t),t)
Valem para o Filtro Estendido de Kalman as mesmas recomendacoes decarater pratico dadas para o Filtro de Kalman, agora com mais razao, pois osmodelos de trabalho para a dinamica do processo do estado e do processo deobservacao sao aproximacoes lineares de processos realmente nao-lineares.
6.2.4 Procedimentos adaptativos
Compensacao do modelo dinamico
Em aplicacoes praticas e comum acontecer situacao onde se tem um modelode trabalho para a dinamica do processo de estado em que ha efeitos nao

Capıtulo 7
Filtragem – conceitos eaplicacoes
Luiz Wagner Pereira Biscainho
Na Engenharia Eletrica, o termo sinal remete a uma grandeza eletricaque varia no tempo. Nesse caso, o processamento do sinal seria apenas amodificacao dessa grandeza por um dado circuito eletrico.
Em termos mais gerais, pode-se conceber um sistema eletrico que processauma grandeza de outra natureza, fazendo uso de transdutores. E o caso deum sistema de amplificacao de som. Um sinal eletrico e dito analogico porguardar analogia com a grandeza que ele representa proporcionalmente – eacaba por ser chamada, ela mesma, de sinal. Em geral, trata-se de um sinalcontınuo no tempo.
O processamento digital se baseia em maquinas de estados sequenciais elogica binaria. Aqui, um sinal consiste de uma sequencia de numeros (quepodem ser as amostras de um sinal contınuo), ou seja, e discreto no tempo.Alem disso, precisa ser representado em bits, o que o faz digital; como con-sequencia disso, e tambem discreto na amplitude.
A escalada da miniaturizacao e da velocidade dos sistemas digitais, a par-tir da segunda metade do sec. XX, permitiu aumentar proporcionalmente acomplexidade do processamento. A implementacao pode empregar desde umamaquina dedicada que realize de forma otimizada as operacoes necessarias(solucao mınima, por hardware) ate um computador generico que execute al-goritmos responsaveis por essas operacoes (solucao mais flexıvel, por software).Neste ultimo caso, a possibilidade de abstracao permite realizar operacoes decomplexidade quase ilimitada.
E possıvel, ainda, tratar como sinais grandezas cuja variavel independentenao e o tempo, como a temperatura ao longo de um fio metalico.

184 Enciclopedia de Automatica
b2
b1
b0
–a1
–a0
x(t) y(t)
q1(t)
q2(t)
∫
∫
Figura 7.1: Diagrama de blocos de um sistema contınuo linear invariante notempo de segunda ordem, com o coeficiente a2 = 1.
do sistema ao impulso permite calcular sua resposta a uma entrada genericax(t) atraves da integral de convolucao
y(t) = (h ∗ x)(t) ∫ ∞
−∞x(τ)h(t− τ)dτ. (7.3)
Analogamente, sistemas discretos lineares invariantes no tempo sao descri-tos por equacoes de diferencas da forma
N∑l=0
aly[n− l] =M∑i=0
bix[n− i], (7.4)
sendo agora n o ındice da amostra no tempo. Adotou-se a notacao [] paraevitar ambiguidade. Os responsaveis pela memoria do sistema sao os atrasos.A ordem max(N,M) do sistema e seu numero mınimo de atrasos. Deve-seobservar que, na forma acima, o sistema e causal. A Figura 7.2 mostra odiagrama de blocos de um sistema de segunda ordem, onde ∆ representa umatraso unitario; q1[n] e q2[n] sao variaveis de estado, que serao definidas naSubsecao 7.1.4.
O impulso unitario discreto no tempo e definido como
δ[n]
1, n = 00, n = 0
. (7.5)
A resposta h[n] do sistema ao impulso permite calcular sua resposta a umaentrada generica x[n] atraves da soma de convolucao
y[n] = (h ∗ x)[n] ∞∑
k=−∞x[k]h[n− k]. (7.6)

Capıtulo 8
Sistemas inteligentes naautomatica
Takashi Yoneyama
Sistemas Inteligentes sao fascinantes, na medida em que apresentam umadiversidade de aplicacoes relevantes, alem de ensejarem um vasto e desafiadorcampo para estudos cientıficos de natureza multidisciplinar. Em particular,aplicacoes importantes de Sistemas Inteligentes sao encontradas no campo daAutomatica. Em geral, sao utilizados conhecimentos da Teoria de InteligenciaArtificial (IA) para o desenvolvimento de tais sistemas. Portanto, as refe-rencias as ferramentas de IA recebem um destaque especial no texto que sesegue. Face a amplidao do tema, seria impossıvel discutir aqui todos os as-pectos com detalhes. Assim, buscou-se oferecer, neste capıtulo, apenas umavisao superficial, porem suficientemente abrangente, dos conceitos considera-dos mais fundamentais. O objetivo primordial e, portanto, mostrar de formaintuitiva, as ideias envolvidas em IA, ressaltar o potencial dos sistemas exis-tentes, despertar a curiosidade de modo geral e oferecer indicacoes para aliteratura especıfica, enfatizando as publicacoes nacionais.
Em termos de conteudo, esta secao encontra-se organizada de modo a res-ponder a algumas indagacoes:
1. O que e Inteligencia Artificial (IA)?
2. Por que IA e importante na area de Automatica?
3. Que ferramentas de IA sao disponıveis atualmente?
4. Que topicos correlatos sao importantes no desenvolvimento de SistemasInteligentes?
5. Ha exemplos reais de Sistemas Inteligentes?

Cap. 8 Sistemas inteligentes na automatica 223
8.2 Por que IA e importante na area de Automatica?
Sistemas automaticos sao, por definicao, aqueles que prescindem da inter-vencao humana para a sua operacao rotineira. Por exemplo, se o piloto humanoescolhe uma trajetoria, o piloto automatico faz a aeronave segui-la, apesar deperturbacoes como rajadas de vento e variacoes na posicao do centro de massa,devido ao movimento dos passageiros. Desta forma, o piloto humano estarialiberado para executar tarefas mais complexas de planejamento, monitoracaoe comunicacao, preocupando-se com a tempestade a frente, congestionamentono aeroporto de destino, superaquecimento da turbina ou o passageiro que estapassando mal. Enfim, sistemas automaticos sao projetados para evitar inter-vencoes tediosas, arduas ou insalubres para os humanos, reservando a estesatividades mais nobres.
Por outro lado, se o ser humano esta ausente, os sistemas automaticospoderiam ficar desprovidos de algumas capacidades muito convenientes. Nestecontexto, busca-se dotar as “maquinas” de inteligencia, com vistas a ganhoscomo produtividade, qualidade, custo, confiabilidade, conforto e seguranca.Por exemplo, quando um operario humano realiza uma tarefa manual, ele podese aperfeicoar ao longo do tempo, demonstrando aprendizagem, bem comoadotar uma sequencia mais eficiente de acoes, demonstrando planejamento. Ooperario podera perceber pecas grosseiramente deformadas, eliminando-as doprocesso, demonstrando capacidade de reconhecer padroes. Na ocorrencia deum resultado inesperado, o operario podera recorrer a sua memoria e a suacapacidade de analise para diagnosticar a causa da falha.
Como algumas das possıveis aplicacoes de inteligencia artificial, podem sercitados alguns exemplos.
• Interfaceamento Homem-Maquina: Atraves de IA, os equipamentos po-dem apresentar ao operador apenas as informacoes pertinentes e agre-gadas. Por exemplo, no caso de ocorrencia de uma falha na maquina, osistema inteligente pode alertar o operador e indicar uma possıvel solucaopara o problema. Em aplicacoes militares, poderia sugerir um alvo pre-ferencial entre os varios disponıveis. Uma outra aplicacao possıvel seriaa de interacao vocal utilizando linguagem natural.
• Fusao de Dados: Embora o ser humano seja muito habil em combinardados de diversas fontes heterogeneas, a sua capacidade de analise podeser levada ao limite se o volume de informacoes e muito grande ou hadados quantitativos. Nesses casos, a IA pode ser de grande valia pararealizar a fusao de dados.
• Agrupamento, Classificacao e Reconhecimento de Padroes: Humanossao capazes de reconhecer textos escritos com caligrafia pouco elogia-vel e de distinguir palavras pronunciadas com forte sotaque estrangeiro.Humanos sao capazes de localizar uma erva daninha na sua horta, bem

Capıtulo 9
Computacao Bioinspirada emControle de Processos
Fernando Jose Von Zuben
Renato Reder Cazangi
A computacao bioinspirada compreende mecanismos de processamento deinformacao fundamentados em estrategias empregadas por organismos vivospara se adaptarem a mudancas do meio, tomarem decisao na presenca deincertezas e aprenderem com a experiencia. As fontes de inspiracao se apre-sentam nos mais variados nıveis, desde o comportamento coletivo de indivıduosde uma dada especie ate as estrategias adotadas por uma celula para mantersua integridade. Auto-organizacao, realimentacao, processamento nao-linear,manutencao de diversidade e interacoes de agentes elementares sao algumasdas estrategias que vem sendo reproduzidas em computador pela modelagemdireta de fenomenos biologicos com o intuito de resolver problemas de en-genharia, particularmente na area de controle de processos. A robotica mo-vel se diferencia em virtude da potencialidade de implementacao de sistemasautonomos bioinspirados, mas mesmo as formulacoes mais classicas para con-trole de processos tem sido tratadas com base em controladores dotados derecursos bioinspirados, com destaque para os modelos conexionistas e outrasabordagens para controle inteligente. Os topicos abordados por este capıtuloestao organizados da seguinte forma. Nas secoes de 9.1 a 9.4, a computacaobioinspirada e introduzida e discutida. As principais tecnicas computacionaisbiologicamente inspiradas sao detalhadas na secao 9.5. Na secao 9.6, sao apre-sentadas aplicacoes em controle autonomo de robos moveis. Finalmente, al-gumas pesquisas brasileiras correlatas estao na secao 9.7 e as conclusoes seencontram na secao 9.8.

Cap. 9 Computacao Bioinspirada em Controle de Processos 271
Ocorrências
CapColMon
83634323 3
10 20 30 40 50 60 70 80 90 100Gerações
Colisões15
Capturas81
Monotonias8
Gerações104
Iterações5000
A
D
B
C
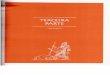
Figura 9.15: Simulacao em que o robo aprende a desviar de obstaculos ecapturar alvos eficientemente.
Nas simulacoes, o robo e um triangulo, as partes em preto sao obstaculos,os tracos sao a trajetoria do robo e os pequenos quadrados numerados repre-sentam alvos que foram capturados. O ambiente utilizado no experimentoa seguir e mostrado a esquerda da Figura 9.15 e, a direita, e apresentado ografico acumulado do numero de eventos pelo numero de geracoes ao final dasimulacao. As regioes de A a D sao areas de insercao automatica de alvos.Tao logo o robo captura um alvo em A, aparece outro sucessivamente em B,C e D, recomecando em A, e assim por diante. Quer-se verificar se realmenteo sistema e capaz de aprender e cumprir seus objetivos. O grafico mostradoesta em funcao do numero de geracoes para mostrar que o SNA com poucasgeracoes (processos evolutivos) foi capaz de compor adequadamente seus com-portamentos. Observa-se que, apos 20 geracoes do sistema evolutivo, a curvade colisoes estabilizou, indicando que o sistema passou a desviar efetivamentedos obstaculos. Com 30 geracoes, o SNA comecou a esbocar ambos os compor-tamentos e, daı em diante, passou a coordena-los apropriadamente, levando orobo a nao mais colidir e a capturar alvos consecutivamente.
Na Figura 9.16, tem-se um experimento apenas em simulacao. O robo foitreinado no primeiro ambiente (quando o robo captura um alvo na regiao A,aparece outro na regiao B e assim por diante, continuamente) ate que o sis-tema de navegacao atingisse um nıvel de desempenho considerado satisfatorio(capturando alvos consecutivamente e nao mais colidindo em obstaculos). Aseguir, o robo sendo controlado pelo mesmo sistema treinado anteriormente ecolocado em ambientes diferentes e mais complexos com alvos em posicoes fixas(nas posicoes e sequencia mostradas pelos ıcones numerados). Tanto no caso
Figura 9.16: Ambiente inicial para treinamento do SNA (esquerda) e ambi-entes mais complexos para teste de generalizacao (centro e direita).

Capıtulo 10
Modelagem e controlenebuloso
Ricardo Tanscheit
Fernando Gomide
Marcelo Minhoto Teixeira
Em processos e sistemas complexos, requerem-se mecanismos para lidarcom informacoes imprecisas e procedimentos de raciocınio e processamentoaproximado para torna-los trataveis. Uma estrategia eficaz nestas circunstan-cias envolve a aquisicao, representacao e o processamento de nocoes descritaslinguisticamente. Nocoes linguısticas descrevem objetos e grandezas, cujasclasses nao apresentam fronteiras delineadas de forma precisa.
A teoria de sistemas nebulosos e uma abordagem formal cujo propositoe tratar a modelagem, a representacao, o raciocınio e o processamento deinformacoes imprecisas como uma estrategia de solucao de problemas. No nu-cleo dos sistemas nebulosos esta a teoria de conjuntos nebulosos, que permitetraduzir, em termos matematicos, nocoes, informacoes e regras que expressamconhecimento de forma linguıstica. Ela tambem fornece um mecanismo deinferencia que utiliza informacao imprecisa representada por variaveis carac-terizadas por conjuntos nebulosos e um conjunto de regras que representamfuncoes ou relacoes entre as variaveis envolvidas para processar informacao etomar decisoes. Conjuntos e sistemas nebulosos sao elementos que compoem,juntamente com redes neurais e computacao probabilıstica, a inteligencia com-putacional, item de significativa relevancia tecnologica em processamento deinformacao e decisao no mundo contemporaneo.
Aplicacoes varrem areas distintas como modelagem (Capıtulo 4), controle(Capıtulo 9 do volume I desta obra), otimizacao, planejamento, previsao, mine-racao de dados, classificacao, reconhecimento de padroes, visao computacional(Capıtulo 15), diagnostico, biomatematica e vida artificial (Capıtulos 8 e 9),

Cap. 10 Modelagem e controle nebuloso 293
Involucao: (A′)′ = AIdempotencia: A ∩A = A
A ∪A = AComutatividade: A ∩B = B ∩A
A ∪B = B ∪AAssociatividade: A ∩ (B ∩ C) = (A ∩B) ∩ C
A ∪ (B ∪ C) = (A ∪B) ∪ CDistributividade: A ∩ (B ∪ C) = (A ∩B) ∪ (A ∩ C)
A ∪ (B ∩ C) = (A ∪B) ∩ (A ∪ C)Absorcao: A ∩ (A ∪B) = A
A ∪ (A ∩B) = ALei Transitiva: se A ⊂ B e B ⊂ C ⇒ A ⊂ CLeis de De Morgan: (A ∩B)′ = A′ ∪B′
(A ∪B)′ = A′ ∩B′
Observando que as funcoes de pertinencia dos conjuntos vazio (∅) e universo(X ) sao definidas como sendo 0 e 1, respectivamente, verificam-se tambem asseguintes propriedades:
A ∩ ∅ = ∅ e A ∪ ∅ = A
A ∩X = A e A ∪X = X
As propriedades de conjuntos classicos A ∩ A′ = ∅ e A ∪ A′ = X (meioexcluıdo e nao-contradicao, respectivamente) nao se verificam para conjuntosnebulosos quando os operadores max e min sao utilizados:
µA∩A′(x) = µA(x) ∧ (1 − µA(x)) = 0 ⇒ A ∩A′ = ∅µA∪A′(x) = µA(x) ∨ (1 − µA(x)) = 1 ⇒ A ∪A′ = X
Observe-se que, em geral, normas-t e normas-s nao satisfazem as duas leisacima; excecoes sao o produto limitado
µA(x) ∗ µB(x) = max[0, µA(x) + µB(x) − 1]
e a soma limitada µA(x)∗µB(x) = min[1, µA(x)+µB(x)], entre outros. A dis-tributividade tambem nao e satisfeita para a maioria das normas-t e norma-s;contudo todas as normas-t e normas-s, por serem operadores nao decrescentes,distribuem sobre os operadores min e max. Por exemplo:
µA(x) ∗ (µB(x) ∧ µC(x)) = (µA(x) ∗ µB(x)) ∧ (µA(x) ∗ µC(x))
10.3 Relacoes nebulosas
No caso de conjuntos ordinarios, uma relacao exprime a presenca ou aausencia de uma associacao (ou interacao) entre elementos de dois ou maisconjuntos. Formalmente, dados dois universos X e Y, a relacao R definidaem X × Y e um subconjunto do produto cartesiano do dois universos, de tal

322 Enciclopedia de Automatica
10.8.2 Representacao aproximada de sistemas nao-lineares commodelos fuzzy Takagi-Sugeno
A seguir sera ilustrada a aproximacao obtida pelos modelos nebulosos TSpara uma funcao nao-linear utilizando funcoes de pertinencia do tipotriangular.
Considere a funcao nao-linear f(x) descrita na Figura 10.26. Note que estafuncao pode ser aproximada, para x ≈ x0 = 0, por f1(x) = a1x, que e a retatangente desta curva em x = 0.
0
1 21
f(x)
f(x)
f1a1x
x1
f2a2x
f(x)ff (x) 1(a1x) 2(a2x)0x0
ff (x)
x
Figura 10.26: Ilustracao da aproximacao obtida por modelos nebulosos TS.
Uma aproximacao linear para esta funcao, para x ≈ x1, e f2(x) = a2x;observe-se que esta segunda aproximacao linear nao e tao boa quanto a primeira,pois, por ser uma aproximacao linear, ela deve passar pela origem, o que im-pede que coincida com a reta tangente de f(x) em x = x1.
Adotando-se f1(x) e f2(x) como modelos locais, e as funcoes α1(x), α2(x)definidas na Figura 10.26 (observe-se que α1(x) e α2(x) sao positivas e queα1(x) + α2(x) = 1), um modelo nebuloso TS para f(x) seria, como ilustradona Figura 10.26
ff (x) = α1(x)f1(x) + α2(x)f2(x).
Pode-se observar que, se x ≈ x0, entao α1 ≈ 1, α2 ≈ 0 e ff (x) ≈ f1(x) ese x ≈ x1, entao α2 ≈ 1, α1 ≈ 0 e ff (x) ≈ f2(x).
Finalmente, verifica-se que ff (x) proporciona uma melhor aproximacao dafuncao f(x) do que as funcoes f1(x) ou f2(x) (linearizacao em torno de umponto de operacao) para, por exemplo, x0 ≤ x ≤ x1. Obviamente, se o numerode modelos locais for aumentado, a aproximacao torna-se melhor.
Esse exemplo simples mostra o potencial dos modelos nebulosos TS notratamento de funcoes ou de sistemas nao-lineares.

Capıtulo 11
Redes neurais em modelagemde sistemas
Luiz Pereira Caloba
Modelos matematicos de sistemas fısicos sao ferramentas essenciais paraum imenso numero de areas do conhecimento, inclusive para a automatica.Modelos lineares sao bastante bem estudados e conhecidos, mas infelizmentea representacao precisa da maioria dos fenomenos da natureza inclui nao-linearidades. O objetivo deste capıtulo e mostrar como redes neurais podemser utilizadas para modelar com precisao sistemas nao-lineares estaticos oudinamicos. Supomos que o leitor ja dispoe de algum conhecimento basico so-bre modelagem de sistemas e redes neurais, uma vez que farta bibliografiaexiste sobre estes assuntos. Na Secao 11.1 apresentamos a rede neural feed-forward que sera usada ao longo deste trabalho, sua aplicacao em modelageme comentamos alguns detalhes de seu treinamento e operacao. Na Secao 11.2apresentamos o uso de tecnicas neurais para analisar modelos fenomenologicose introduzimos os submodelos hıbridos neural-fenomenologicos. Na Secao 11.3apresentamos brevemente alguns aspectos de sistemas dinamicos e introduzi-mos a estrutura NARMA, que sera usada para modela-los, discutindo detalhesdesta modelagem e de seu treinamento. Na Secao 11.4 apresentamos as con-clusoes e algumas referencias bibliograficas.
11.1 Redes neurais e modelagem
Redes Neurais sao algoritmos que tentam emular de uma forma muito sim-plificada a maneira como o cerebro animal processa determinadas informacoes.Sao baseadas em processadores elementares chamados neuronios, Figura 11.1,definidos pelas suas funcoes de excitacao u = Ψ(x) e de ativacao v = Φ(u).

Cap. 11 Redes neurais em modelagem de sistemas 327
t i
y
tgh
tgh
tgh tQ
VQWQE
t0
Vi
w10Z 1o V 1o
Z1
Zj
ZE
EntradasCamada
IntermediáriaCamadade Saída
Saída
~
Figura 11.2: Rede neural feedforward basica usada neste trabalho.
E possıvel demonstrar que para um Q suficientemente grande, mas finito,esta rede e um aproximador universal para y = ϕ (z), desde que ϕ(·) seja L2
(e.g., ϕ(·) admita transformada de Fourier), o que e o caso de praticamentetodas as funcoes de interesse da engenharia.
11.1.2 Treinamento
O treinamento da rede e o processo de busca do conjunto de sinapses(wij , tj) que minimiza alguma funcao objetivo F . Usualmente F e escolhidacomo o erro medio quadratico na saıda da rede
F = E∀p
(ε2p)
= 1P
∑Pp=1
(ε2p)
(11.5)
εp = yp − yp, (11.6)
em que p = 1, · · · ,P sao os pares entrada-saıda(zp,yp
)e yp e yp sao respecti-
vamente as saıdas desejada e estimada pela rede para o par p. Outras funcoesobjetivo, p. ex. erro relativo medio quadratico, erros de ordem mais elevada,etc., podem tambem ser usadas se necessario.
O treinamento usual e por epocas. Para a rede da Figura 11.2 e F =E ∀p
(ε2p)
os acrescimos nas sinapses calculados para descida contra o gradiente(ou retropropagacao do erro, regra delta) para cada par entrada-saıda (zp,yp)usando passo de treinamento α sao dados por:
εp = yp − yp,
∆ti = 2αεpvi , ∀i = 1, · · · , Q ; v0 = 1,∆wij = 2αεpti
(1 − v2
i
)zj , ∀i = 1, · · · , Q ;∀j = 1, · · · , E ; z0 = 1.
E o acrescimo a ser aplicado apos cada epoca e o valor medio dos acrescimoscalculados para cada par entrada-saıda pelas equacoes acima.

Capıtulo 12
Robos manipuladores
Liu Hsu
Fernando Lizarralde
Este capıtulo da uma visao geral dos fundamentos da cinematica e dadinamica ligados ao problema de controle de manipuladores roboticos e suasvariacoes. Para fins de ilustracao, sao incluıdas aplicacoes tıpicas de controleem robotica. Outras metodologias, enfoques e aplicacoes podem ser encon-trados em (Fu, Gonzalez e Lee, 1987; Spong, Lewis e Abdallah, 1993; Spong,1996; Lewis, 1999). Aspectos mais tecnologicos relacionados com automacaoindustrial podem ser encontrados em (Rosario, 2005; Romano, 2002).
Na maioria das areas de atuacao da robotica, a conclusao de uma tarefarequer a execucao de um movimento especıfico planejado para o efetuador deum manipulador robotico. O movimento pode ser livre, se nao existir interacaofısica entre o manipulador e o ambiente, ou restrito, se ocorrerem forcas decontato entre o efetuador e o ambiente.
A tarefa de executar corretamente o movimento do efetuador e atribuıdaao sistema de controle que fornece aos atuadores das juntas do manipuladorcomandos compatıveis com a trajetoria de movimento desejada. O projeto decontrole de movimento do manipulador exige a analise das caracterısticas daestrutura mecanica, dos atuadores e dos sensores. O objetivo desta analisee deduzir os modelos matematicos dos principais dispositivos que integram orobo. Assim, a partir da modelagem de um manipulador robotico e possıveldefinir e analisar estrategias de controle de movimento adequadas.
A modelagem de robos industriais e geralmente dividida em modelagemcinematica e dinamica. A cinematica de um robo refere-se a relacao entre omovimento das juntas do robo e o movimento da ferramenta sem consideraras forcas/momentos que geraram este movimento. A cinematica e necessariapara resolver problemas de manipulacao, alguns dos quais sao puramentecinematicos.

350 Enciclopedia de Automatica
O modelo dinamico descreve a relacao entre as forcas generalizadas atu-ando sobre o robo e o movimento da estrutura governado por aceleracoes,velocidades e posicoes das juntas. O modelo dinamico e util para projetosmecanicos de estruturas, escolha de atuadores, determinacao de estrategias decontrole, e simulacao do movimento do manipulador.
Neste capıtulo sao apresentados esquemas de controle baseados no mo-delo cinematico de sistemas roboticos. Sao tambem apresentadas estrategiasde controle que consideram a dinamica dos sistema, incluindo esquemas des-centralizado e baseados em linearizacao por realimentacao. Por ultimo, saoapresentados esquemas de controle de forca.
12.1 Manipulador mecanico
Um dos sistemas roboticos mais encontrados na industria, na academia eate na area espacial, sao os robos manipuladores industriais (vide Figura 12.1),ou chamados simplesmente de manipuladores.
Figura 12.1: Diversos Manipuladores Roboticos.
A norma ISO10218 define um manipulador industrial como sendo: “umamaquina manipuladora, com varios graus de liberdade, controlada automati-camente, reprogramavel, multifuncional, que pode ter base fixa ou movel parautilizacao em aplicacoes de automacao industrial” (Romano, 2002).
Um manipulador esta constituıdo pela: Estrutura mecanica que consistenuma sucessao de corpos rıgidos (elos) interligados por articulacoes (juntas).O manipulador e caracterizado por um braco que garante a mobilidade, umpunho que fornece a destreza, e um efetuador que executa a tarefa especifi-cada. Atuadores que geram o movimento do manipulador atraves da atuacaonas juntas. Os motores empregados sao tipicamente eletricos e hidraulicos, eocasionalmente pneumaticos. Sensores que medem o estado do manipulador e

Capıtulo 13
Robos moveis
Guilherme Augusto Silva Pereira
Luiz Chaimowicz
Robos moveis sempre estiveram presentes no nosso imaginario. Os varioscontos de Isaac Asimov e os droids R2D2 e C3PO de Guerra nas Estrelassao apenas alguns exemplos de como nos sempre consideramos a possibilidadede, no futuro, convivermos com robos moveis em nosso dia-a-dia. Nos ulti-mos trinta anos, esses cenarios de ficcao se tornaram um pouco mais proximoscom os avancos da robotica movel. De forma geral, a robotica movel e a areada robotica que trabalha com mecanismos que podem se locomover pelo seuambiente, nao estando restritos a uma base fixa. A principal categoria derobos moveis sao os robos terrestres, que se movimentam no solo utilizandodispositivos como rodas, esteiras e pernas. Dentre esses ultimos, tem-se espe-cialmente os robos humanoides que tentam replicar a anatomia humana. En-tretanto, existem tambem outras categorias como os robos aereos (ou UAVs– unmanned aerial vehicles) e os robos subaquaticos (UUVs – unmanned un-derwater vehicles). A Figura 13.1 mostra alguns tipos de robos moveis: robospara ambientes externos (Pionner 3AT ) e internos (Nomad200 ), um robo hu-manoide (QRio da Sony) e um dirigıvel autonomo (GRASP Lab. – Universityof Pennsylvania).
Trabalhos pioneiros em robotica movel foram realizados por pesquisadores,como Nikola Tesla no final do seculo XIX e W. Grey Walter nos anos 50.Entretanto, o primeiro robo movel a ser criado considerando-se os padroesatuais foi o Shakey (Nilson, 1969). Desenvolvido por pesquisadores do Stan-ford Research Institute no final da decada de 60, o Shakey era equipado comuma camera de vıdeo e sensores opticos de distancia. Ele utilizava tecnicasclassicas de inteligencia artificial para construir um mapa de seu ambiente erealizar tarefas simples como achar um objeto (de cor e tamanho especifica-dos) e move-lo para algum lugar predeterminado. Outros projetos pioneirosna robotica movel foram o Hilare, desenvolvido no LAAS (Giralt, Chatila e

370 Enciclopedia de Automatica
Figura 13.1: Alguns tipos de robos moveis.
Vaisset, 1984), e a dupla Stanford Cart e CMU Rover (Moravec, 1983), nasdecadas de 70 e 80. A partir de meados da decada de 80, varios robos moveisforam construıdos em diversas universidades e laboratorios de pesquisa. Algu-mas empresas tambem passaram a desenvolver e comercializar robos moveisvoltados para pesquisa (Active Media Robotics, 2005; Evolution Robotics, 2005)e mais recentemente, voltados para usuarios domesticos como aspiradores depo (IRobot, 2005) e cortadores de grama autonomos (Friendly Robotics, 2005)e robos para o entretenimento (Sony AIBO, 2005).
Este capıtulo pretende dar uma visao geral sobre essa importante areadentro da robotica. Serao abordados topicos importantes como locomocao,paradigmas de programacao, planejamento de caminhos, localizacao, mapea-mento e cooperacao entre multiplos robos. O foco principal estara nos robosterrestres, mas alguns dos topicos abordados tambem se aplicam a outras ca-tegorias de robos moveis.
13.1 Locomocao
Os robos moveis podem ser classificados de diversas maneiras que incluem aforma de locomocao, os tipos de tarefas executadas e o seu grau de autonomia.Neste capıtulo, os robos serao classificados principalmente pela forma como selocomovem em seu ambiente. De forma geral, os robos moveis podem pertencera tres grandes grupos: terrestres, aquaticos e aereos. Dentro de cada grupo,pode-se caracterizar os robos de acordo com seus sistemas de locomocao. Porexemplo, os robos aereos podem ser helicopteros, dirıgıveis ou avioes, cadaqual com caracterısticas distintas de locomocao.
Um grande numero de caracterısticas influencia a escolha do sistema delocomocao a ser utilizado em uma tarefa. Entre elas pode-se citar: manobra-bilidade, controlabilidade, estabilidade, eficiencia e tracao (Everett, 1995a). Osistema de locomocao de um robo movel pode ser representado por modeloscinematicos e dinamicos. Apesar de o modelo dinamico ser importante para ocontrole de alguns tipos de robos, principalmente os robos aereos e aquaticos,este capıtulo apresentara somente sua modelagem cinematica. A justificativapara este fato e que grande parte dos sistemas de controle de movimento ebaseado apenas na cinematica dos robos. Alem disso, vale ressaltar que, umavez desenvolvido um modelo cinematico, a dinamica pode ser adicionada por

Capıtulo 14
Percepcao Robotica
Mario Sarcinelli Filho
Teodiano Freire Bastos Filho
O uso de sensores permite que um robo possa obter informacao sobre simesmo e sobre o ambiente ao seu redor, o que pode ajuda-lo a melhor realizar atarefa que lhe foi atribuıda. Ou seja, ele se torna apto a perceber seu proprioestado e o estado do ambiente ao seu redor. O uso de sensores tambem confereao robo a capacidade de modificar a forma de realizar sua tarefa, de acordocom a percepcao do ambiente em que se encontra. Diversos sensores usadosem Robotica sao tratados neste capıtulo, exceto sensores de visao, que saoobjeto do Capıtulo 15.
Os sensores utilizados em conexao com robos, sejam eles manipuladores ourobos moveis, podem ser agrupados em duas categorias principais: sensoresinternos ou propioceptivos, que fornecem informacao sobre o estado do robo(atraves da medicao de variaveis de interesse, como velocidade, temperatura,etc.), e sensores externos ou extereoceptivos, cujo objetivo e obter informacaodo ambiente ao redor do robo, para ser usada como realimentacao pelo seusistema de controle.
O sucesso no controle da maioria dos robos depende da capacidade deobter informacao sobre as juntas e/ou a extremidade, no caso de um robomanipulador, ou sobre as rodas, no caso de um robo movel a rodas. Assim,posicao, velocidade e/ou aceleracao (pelo menos uma representacao analogicaou digital das mesmas) devem ser medidas para comprovar que o robo se moveda maneira desejada ou se posiciona conforme comandado.
Embora seja possıvel utilizar um robo sem qualquer sensor externo, cadavez mais aplicacoes necessitam de tal tipo de sensor. Por exemplo, se umrobo manipulador tem que manusear diferentes objetos, dentre os quais algunsfrageis, e importante medir a forca sendo exercida pela garra e controlar seuvalor para pegar o objeto sem quebra-lo. Um outro exemplo e o caso em queum robo movel deve ir de um ponto a outro em seu ambiente de trabalho,

394 Enciclopedia de Automatica
Base de plástico flexívelSeçãotransversalde área A
Superfíciedo objeto
½”
10 Ω ≤ Rgage ≤ 1K Ω
Pintura de Al ou Cu
1 ½”
L
(a) Estrutura basica.
Extensômetro
Vo
R
673
24
Rg R2 1k
RbR1
(b) Ponte de Wheatstone.
Figura 14.4: O extensometro usado para medir forca.

Capıtulo 15
Visao robotica
Anna Helena Reali Costa
Jacques Waldmann
Reinaldo Augusto da Costa Bianchi
Visao e um meio sensorial extremamente poderoso para a interacao como ambiente. Entretanto, o emprego de visao em robotica nao e uma tarefasimples. O processo de formacao de imagens pode produzir imagens identicaspara uma grande variedade de superfıcies, com diferentes materiais e diversascondicoes de iluminacao e de observacao. Apesar da interpretacao humana dainformacao visual ser aparentemente trivial, estima-se que metade ou mais docerebro humano e dedicado a esta tarefa (Dudek e Jenkin, 2000), indicandoque tal solucao nao deve ser elementar.
Visao computacional refere-se ao processamento de dados advindos dequalquer sensor que use o espectro eletromagnetico para produzir imagens, quesao representadas por meio de um conjunto de pixels (contracao de pictureelement), denominado imagem digital. O objetivo da visao computacionale a determinacao automatica da estrutura e propriedades do ambiente (tridi-mensional, possivelmente dinamico), a partir de uma ou varias imagens. Asimagens podem ser monocromaticas ou coloridas, capturadas por um ou pormultiplos sensores que, por sua vez, podem estar fixos ou em movimento. Asinformacoes a serem extraıdas do ambiente por meio do emprego da visao po-dem ser geometricas (formas, dimensoes, distancias, etc.) ou materiais (cores,texturas, etc.). Se o ambiente for dinamico, pode-se inferir a natureza dasmudancas, assim como realizar previsoes acerca do futuro.
Para alcancar solucoes dos problemas em visao computacional deve-se, ini-cialmente, entender como os estımulos sensoriais sao criados pelo ambientee, depois, questionar qual ambiente produziu tais estımulos. De certa forma,pode-se pensar em visao computacional como a tentativa de inverter o processode formacao da imagem. Infelizmente, nao existe uma solucao unica para esta

416 Enciclopedia de Automatica
(a) (b)
(c)
Figura 15.2: (a) Imagem original com 256 nıveis de valores de cinza, (b)imagem resultante da aplicacao do operador Sobel e (c) apos sua binarizacaoutilizando um limiar de valor 50.