Embed Size (px)
DESCRIPTION
Estendendo o Planejamento Clássico para Aplicações do Mundo Real. Tempo, prazos e recursos. Relembrando sobre POP-STRIPS. Diferenças principais entre busca e planejamento? Tipo de problema Representação de estados e ações Planos gerados Processo de geração do plano - PowerPoint PPT Presentation
Citation preview

CIn-UFPE1
Estendendo o PlanejamentoClássico para Aplicações do
Mundo Real
Tempo, prazos e recursos

CIn-UFPE2
Relembrando sobre POP-STRIPS
Diferenças principais entre busca e planejamento?• Tipo de problema• Representação de estados e ações• Planos gerados• Processo de geração do plano
Vantagens de planejamento de POP-STRIPS?• Flexibilidade, expressividade,... • Redução de complexidade (STRIPS, forma de planejar,...)
Limitações• Ambientes acessíveis, deterministas, estáticos...• E várias outras: quais?

CIn-UFPE3
Outras Limitações de POP-STRIPS
O tempo não é levado em conta• Diz “o que”, mas não “quando” nem “por quanto
tempo”
A limitação dos recursos não é considerada• Não custa nada agir (ex: orçamento, pessoas)
Pré-condições e efeitos são simples demais• Os operadores são essencialmente proposicionais
– ex: sem quantificador universal nos efeitos, não se pode dizer que os componentes da aeronave sobem com ela

CIn-UFPE4
Planejando com Tempo, Prazos e Recursos

CIn-UFPE5
Tempo e Prazos
Job Shop Scheduling• Completar conjunto de tarefas (seqüência de ações) • Cada ação tem uma duração e pode precisar de recursos• Encontrar o escalonamento mais rápido para a execução
das tarefas, respeitando restrições de recursos
Exemplo de Job Shop Problem• 2 tarefas (jobs): montar dois carros C1 e C2
• Ações: colocar motor, colocar rodas, inspecionar• Ordem: motor antes das rodas e inspecionar no final
Como lidar com isto?

CIn-UFPE6
Tempo e Prazos
Acrescentar Duration(d) para ações em STRIPS Exemplo...
• Init (Chassis(C1) Chassis (C2) Engine(E1,C1,30) Engine(E2,C2,60) Wheels(W1,C1,30) Wheels(W2,C2,15))
• Goal (Done(C1) Done(C2))• Action (AddEngine(e,c),
Precond: Engine (e,c,d) Chassis(c), Effect: EngineIn(c) Duration(d))
• Action (AddWheels(w,c), Precond: Wheels(e,c,d) Chassis(c)^ EngineIn(c)
Effect: WheelsOn(c) Duration(d))• Action (Inspect(c),
Precond: EngineIn(c) WheelsOn(c) Chassis(c)Effect: Done(c) Duration(10))

CIn-UFPE7
Tempo e Prazos
Procedimento: “planejar antes e escalonar depois”• Rodar POP-STRIPS normalmente e depois escalonar ações
(caminho mais rápido)• Abordagem usada na prática, sobretudo porque o plano pode
ser fornecido por um especialista
Solução Encontrada pelo POP “normal”
AddEngine 1
30
AddEngine 2
60
AddWheels 2
15
AddWheels 1
30
Inspect 1
10
Inspect 2
10
FinishStart

CIn-UFPE8
Tempo e Prazos
Método do Caminho Crítico (CPM)• Caminho Crítico: caminho cujo tempo total é maior• Para cada ação, indicar
– Tempo Mais Cedo de Início (ES – Earliest Start) – Tempo Mais Tarde de Início (LS – Latest Start)
• Ações no caminho crítico não podem sofrer nenhum atraso• Ações fora desse caminho podem sofrer atrasos de tolerância
LS - ES

Caminho crítico
[0,0]Start
[0,15]AddEngine1
30
[0,0]AddEngine2
60
[30,45]AddWheels1
30
[60,60]AddWheels2
15
[60,75]Inspect1
10
[75,75]Inspect2
10
[85,85]Finish
Plano
0 10 20 30 40 50 60 70 80t
AddEngine1
Inspect2AddEngine2
AddWheels1
Inspect1
AddWheels2
Escalonamento

CIn-UFPE10
Restrição de Recursos
Problemas reais de escalonamento são ainda mais complexos devido a restrições sobre recursos• Consumable resources - ex. dinheiro• Reusable resources - ex. um único guindaste para
levantar o motor
Como resolver? Solução para recursos consumíveis
• adicionar precondições e efeitos• Action (AddEngine(e,c),
Precond: Engine (e,c,d) Chassis(c) (Money(g) > 100) Effect: EngineIn(c) Duration(d) Money(g-100))

CIn-UFPE11
Restrição de Recursos
Solução para recurso reutilizável: • Mais complicado porque a quantidade de recursos
permanece inalterada depois da ação!• Incrementar representação do problema para incluir novo
campo – “Resource: R(k)”, k unidades de R são necessárias
• Funciona tanto como – uma pré-condição (não se pode fazer sem ele) – um efeito temporário (indisponível pela duração da ação)
Voltando ao exemplo...• 1 guindaste, um macaco mecânico e 1 inspetor disponível

CIn-UFPE12
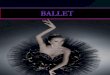
Exemplo: Montagem de Dois Carros
Init (Chassis(C1) Chassis(C2) Engine(E1, C1, 30) Engine(E2, C2, 60) Wheels(W1, C1, 30) Wheels(W2, C2, 15) EngineHoists(1) WheelStations(1) Inspectors(2) )
Goal (Done(C1) Done(C2)
Action (AddEngine(e, c, m),PRECOND: Engine(e, c, d) Chassis(c)EFFECT: EngineIn(c) Duration(d) RESOURCE: EngineHoist(1) )
Action (AddWheels(w, c),PRECOND: Wheels(w, c, d) Chassis(c) EngineIn(c) EFFECT: WheelsOn(c) Duration(d) RESOURCE: WheelStations(1) )
Action (Inspect(c),PRECOND: EngineIn(c) WheelsOn(c) Chassis(c)EFFECT: Done(c) Duration(10) RESOURCE: Inspectors(1) )

Exemplo: Montagem de Dois Carros
EngineHoist(1)
WheelStations(1)
Inspectors(2)
30 60 105 1150
AddEngine 1 AddEngine 2
AddWheels 1 AddWhls 2
Inspect 2
Inspect 1
9070

CIn-UFPE14
Recursos reusáveis
Encontrar o melhor escalonamento que obedece as restrições de recursos é um problema NP-hard
Heurística mais usada: Minimum Slack Algorithm (greedy)
1. A cada interação: identifica as ações não escalonadas cujos predecessores já foram todos escalonados e para as quais existem recursos disponíveis
2. Escalona a que começo o mais cedo possível (earliest start)...
3. Atualiza ES e LS da ação, e recomeça