Embed Size (px)
Citation preview
Estimativa do amortecimento equivalente em edifícios
com dissipadores viscosos
Micaela Eduarda Martins Gonçalves
Dissertação para a obtenção do Grau de Mestre em
Engenharia Civil
Orientador: Professor Luís Manuel Coelho Guerreiro
Júri
Presidente: Professor António Manuel Figueiredo Pinto da Costa
Orientador: Professor Luís Manuel Coelho Guerreiro
Vogal: Professor João José Rio Tinto de Azevedo
Maio 2017

i
Agradecimentos
Quero dedicar esta página a todos os que contribuíram para o sucesso do meu percurso académico, e
tornaram possível a concretização deste desafio.
Em primeiro lugar quero agradecer ao Professor Luís Guerreiro pela orientação, disponibilidade e apoio
imprescindível na realização deste trabalho.
À equipa de voleibol feminino da AEIST, pelo companheirismo e amizade. Foi um orgulho jogar ao
vosso lado.
Aos amigos que fiz no Curso e que são hoje a minha segunda família. Obrigada pela força, paciência,
incentivo e pelos momentos passados. Tornaram, sem dúvida, este caminho mais fácil.
À minha família e aos meus amigos um grande obrigado. Principalmente à Vivi por todo o apoio ao
longo do meu percurso.
Ao Diogo um especial agradecimento pela sua ajuda, incentivo e carinho.
O maior agradecimento é para os meus pais, Adriana e Eduardo, pelo esforço, dedicação, e apoio
incondicional. Obrigada por me terem dado a possibilidade de alcançar este objetivo.

ii

iii
Resumo
O recurso a dissipadores viscosos como sistema passivo de dissipação de energia é uma solução já
comprovada e muito solicitada na proteção sísmica de estruturas, nomeadamente em edifícios altos.
Atualmente são vários os exemplos de aplicação por todo o mundo, tanto em novas estruturas como
no reforço sísmico de estruturas existentes. A solução baseia-se na aplicação de dissipadores de
energia viscosos ao longo das fachadas dos edifícios.
Um dos problemas no dimensionamento deste sistema de proteção sísmica consiste na estimativa do
amortecimento de cada dissipador, para atingir um determinado objetivo predefinido, por exemplo,
limitar a deformação sísmica da estrutura.
A metodologia proposta, baseada na definição de um oscilador equivalente de um grau de liberdade,
considerando apenas a configuração deformada do modo fundamental da estrutura, permite determinar
uma estimativa do coeficiente de amortecimento a adotar nos dissipadores, assumindo que os mesmos
são distribuídos uniformemente ao longo da altura do edifício.
A determinação do amortecimento equivalente a uma distribuição uniforme de dissipadores serve como
base à definição de uma solução global com sistemas de dissipação de energia viscosos.
O presente trabalho apresenta a metodologia desenvolvida e o resultado da sua aplicação a seis
estruturas mistas pórtico-parede distintas.
Palavras-chave:
Dissipadores viscosos, sistemas passivos de proteção sísmica, edifícios altos, amortecimento
equivalente

iv

v
Abstract
The use of passive seismic protection of buildings with viscous dampers is an already proven and very
requested solution, mostly on tall buildings. There are already several examples of this kind of
applications, not only in new structures, but also in the seismic rehabilitation of old buildings. The solution
is based on the application of viscous dampers along the height of the buildings’ facades.
One of the major problems in the design of these systems is the definition of the capacity of each damper
to obtain a predefined goal, for example, a certain reduction on the structure deformation.
The proposed methodology is based on the definition of an equivalent single degree of freedom system,
only considering the contribution of the first vibration mode. It allows a reliable first guess on the definition
of the dampers capacity, assuming that all the dampers are equal and evenly distributed along the height
of the building.
The determination of the equivalent damping attends the definition of a global solution with viscous
dampers.
The present work describes the methodology developed and the result of its application to six different
frame-wall structures.
Keywords:
Viscous dampers, passive seismic protection of buildings, tall buildings, equivalent damping

vi

vii
Índice de conteúdo
Agradecimentos ................................................................................................................................... i
Resumo .............................................................................................................................................. iii
Abstract............................................................................................................................................... v
Índice de conteúdo ............................................................................................................................ vii
Índice de tabelas ................................................................................................................................ ix
Índice de figuras ................................................................................................................................. xi
Simbologia ........................................................................................................................................ xiii
1. Introdução .............................................................................................................................. 1
1.1. Enquadramento ............................................................................................................. 1
1.2. Objetivos e metodologia ................................................................................................ 1
1.3. Organização da dissertação .......................................................................................... 2
2. Ação sísmica em edifícios altos ............................................................................................. 5
2.1. Eventos sísmicos ........................................................................................................... 5
2.2. Definição da ação sísmica em Portugal ........................................................................ 7
3. Sistemas de proteção sísmica ............................................................................................. 11
3.1. Exemplos de aplicação de sistemas passivos de proteção sísmica ........................... 11
3.2. Dissipadores de energia .............................................................................................. 13
3.2.1. Dissipadores histeréticos..................................................................................... 14
3.2.2. Dissipadores viscoelásticos ................................................................................ 15
3.2.3. Dissipadores viscosos ......................................................................................... 15
4. Metodologia de cálculo ........................................................................................................ 19
4.1. Oscilador equivalente de um grau de liberdade .......................................................... 20
4.2. Coeficiente de amortecimento do dissipador .............................................................. 25
5. Caso de estudo .................................................................................................................... 29
5.1. Caracterização da ação sísmica ................................................................................. 29
5.2. Estrutura tipo pórtico puro vs. estrutura tipo parede ................................................... 30
5.3. Modelo numérico ......................................................................................................... 32
6. Resultados e discussão ....................................................................................................... 35
6.1. Exemplo de aplicação ................................................................................................. 35
viii
6.2. Resultados ................................................................................................................... 37
6.3. Análise dos resultados ................................................................................................ 39
6.3.1. Comportamento dos dissipadores viscosos ........................................................ 42
6.3.2. Influência da posição do dissipador .................................................................... 44
6.3.3. Taxa de amortecimento equivalente ................................................................... 45
6.3.4. Método alternativo ............................................................................................... 47
6.3.5. Validação do modelo ........................................................................................... 48
7. Conclusões e desenvolvimentos futuros ............................................................................. 51
7.1. Conclusões .................................................................................................................. 51
7.2. Desenvolvimentos futuros ........................................................................................... 53
Referências Bibliográficas ................................................................................................................ 55
Anexos .............................................................................................................................................. 57
Anexo A – Série de Acelerogramas Artificiais .................................................................................. 59
Anexo B – Deslocamentos modais horizontais ................................................................................ 65
Anexo C – Deslocamentos modais horizontais normalizados ......................................................... 67
Anexo D – Deslocamento relativo entre as extremidades do dissipador ......................................... 69
Anexo E – Espetro de resposta com amortecimento inicial (ξi=5%) e com amortecimento equivalente
(ξeq=15,4%) ....................................................................................................................................... 75

ix
Índice de tabelas
Tabela 3.1 – Aplicação de dissipadores viscosos em edifícios (adaptado de Net 1). ................ 13
Tabela 5.1 – Características gerais das estruturas com comportamento misto pórtico-parede
(adaptado de Brás, 2015). ........................................................................................................... 32
Tabela 5.2 – Características das estruturas mistas (adaptado de Brás, 2015). ......................... 33
Tabela 5.3 – Massa aplicada em cada piso para cada modelo. ................................................. 33
Tabela 6.1 – Características dinâmicas associadas ao primeiro modo de vibração. ................. 35
Tabela 6.2 – Massa (ton) do oscilador equivalente de um grau de liberdade. ........................... 36
Tabela 6.3 – Deslocamento modal no topo do oscilador equivalente de um grau de liberdade
(∆𝑒𝑞). ........................................................................................................................................... 36
Tabela 6.4 – Coeficiente de amortecimento equivalente. ........................................................... 36
Tabela 6.5 – Somatório dos deslocamentos modais relativos entre as extremidades do dissipador
∑∆𝑟𝑒𝑙2. ........................................................................................................................................ 36
Tabela 6.6 – Coeficiente de amortecimento do dissipador (𝐶𝑑𝑖𝑠𝑠). ........................................... 37
Tabela 6.7 – Deslocamento horizontal máximo no topo da estrutura 𝛿ℎ,𝑚𝑎𝑥 (cm). .................. 38
Tabela 6.8 – Redução da resposta da estrutura com dissipadores viscosos ............................. 39
Tabela 6.9 – Percentagem de erro relativo (em módulo) dos resultados obtidos. ..................... 39
Tabela 6.10 – Redução da resposta da estrutura com dissipadores viscosos instalados no
primeiro vão. ................................................................................................................................ 44
Tabela 6.11 – Resposta da estrutura com a taxa de amortecimento equivalente. ..................... 46
Tabela 6.12 – Comparação do coeficiente de amortecimento do dissipador entre os dois
métodos. ...................................................................................................................................... 47
Tabela 6.13 – Redução da resposta da estrutura (ξ=2%) com dissipadores viscosos (método
alternativo). .................................................................................................................................. 48
Tabela 6.14 – Resultados Modelo Mista 1. ................................................................................. 48

x

xi
Índice de figuras
Figura 2.1 – Cenário de destruição provocado pelo sismo em Norcia, Itália 2016 (Net 3). ......... 5
Figura 2.2 – Localização de Portugal no contexto da tectónica de placa (Net 5). ........................ 6
Figura 2.3 – Gaiola pombalina: maquete (esquerda) e parede frontal com enchimento de
alvenaria (direita). .......................................................................................................................... 6
Figura 2.4 – Zonamento sísmico regulamentar em Portugal continental – esquerda: sismo tipo 1
(afastado); direita: sismo tipo 2 (próximo) (CEN, 2010). ............................................................... 8
Figura 2.5 – Espetro de resposta de acelerações para um sismo afastado (tipo 1) e próximo (tipo
2) localizado em Lisboa (Guerreiro, 2016). ................................................................................... 9
Figura 3.1 – Pormenorização do dissipador viscoso instalado no Viaduto de Alhandra (adaptado
de Appleton et al., 2003). ............................................................................................................ 12
Figura 3.2– Bloco de borracha de alto amortecimento, Hospital da Luz, Lisboa. (adaptado de
Ferreira, 2006). ............................................................................................................................ 12
Figura 3.3 – “Pacific Bell North Area Operation Center”, USA, Sacramento, CA (Net 8). .......... 13
Figura 3.4 – Exemplos de colocação dos dissipadores (Guerreiro, 2011b). .............................. 14
Figura 3.5 – Gráfico força-deslocamento para dissipadores histeréticos (Guerreiro, 2006). ..... 14
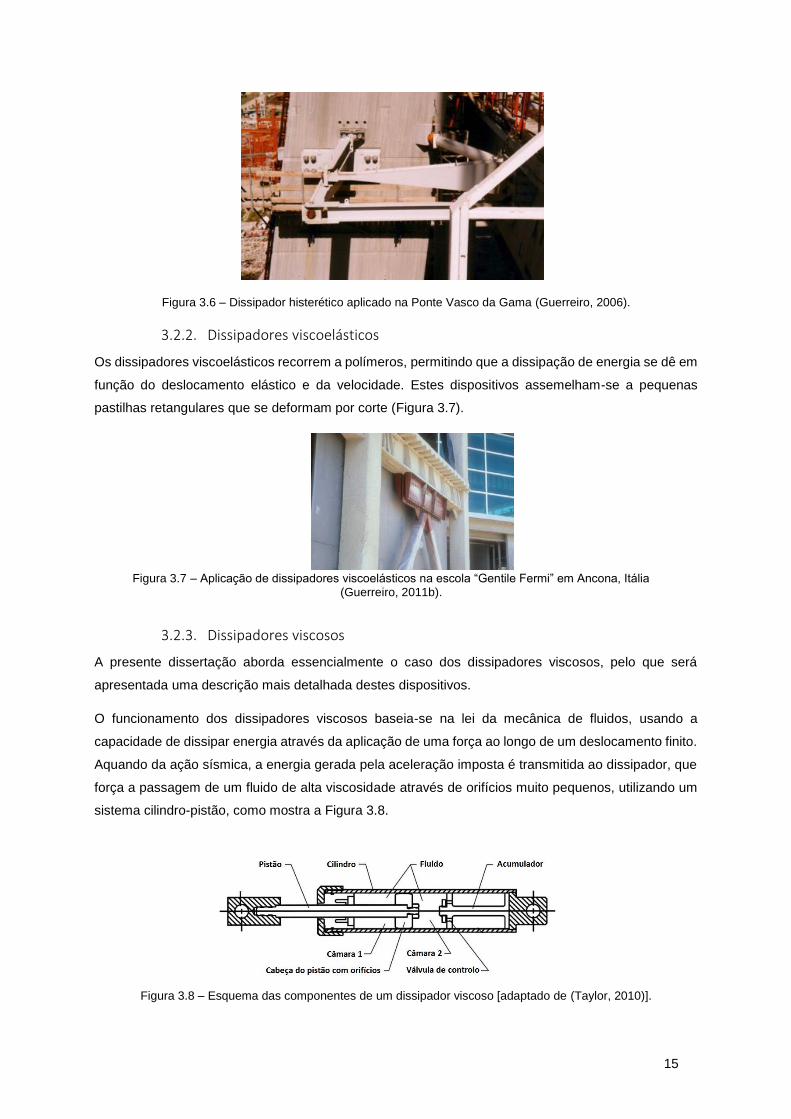
Figura 3.6 – Dissipador histerético aplicado na Ponte Vasco da Gama (Guerreiro, 2006). ....... 15
Figura 3.7 – Aplicação de dissipadores viscoelásticos na escola “Gentile Fermi” em Ancona, Itália
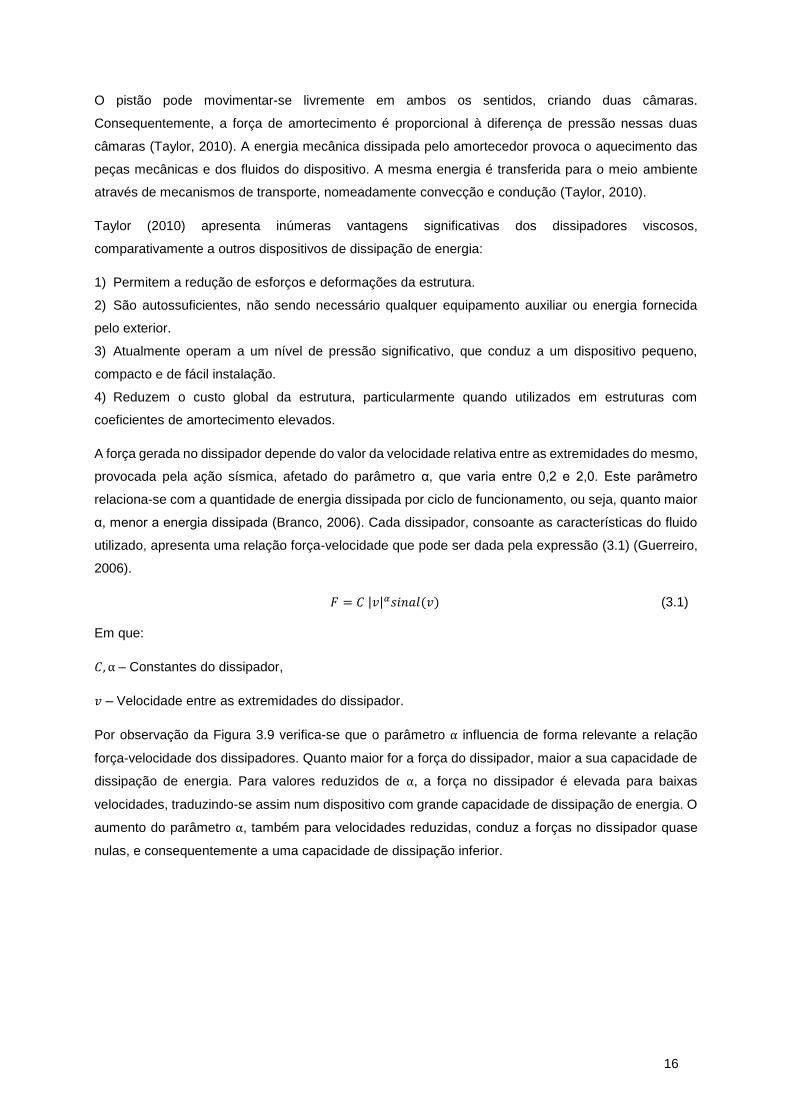
(Guerreiro, 2011b). ...................................................................................................................... 15
Figura 3.8 – Esquema das componentes de um dissipador viscoso [adaptado de (Taylor, 2010)].
..................................................................................................................................................... 15
Figura 3.9 – Influência do parâmetro α na relação força-velocidade do dissipador (Guerreiro,
2006). .......................................................................................................................................... 17
Figura 3.10 – Relação força-deslocamento do dissipador (Guerreiro, 2006). ............................ 17
Figura 3.11– Influência do parâmetro α na relação força-velocidade e na relação força-
deformação do dissipador (Guerreiro, 2006). ............................................................................. 17
Figura 3.12 – Influência do parâmetro C na relação força-deformação do dissipador (Guerreiro,
2006). .......................................................................................................................................... 18
Figura 4.1 – Modelo de um oscilador de um grau de liberdade. ................................................. 20
Figura 4.2 – Representação da energia dissipada no gráfico força-deslocamento. ................... 21
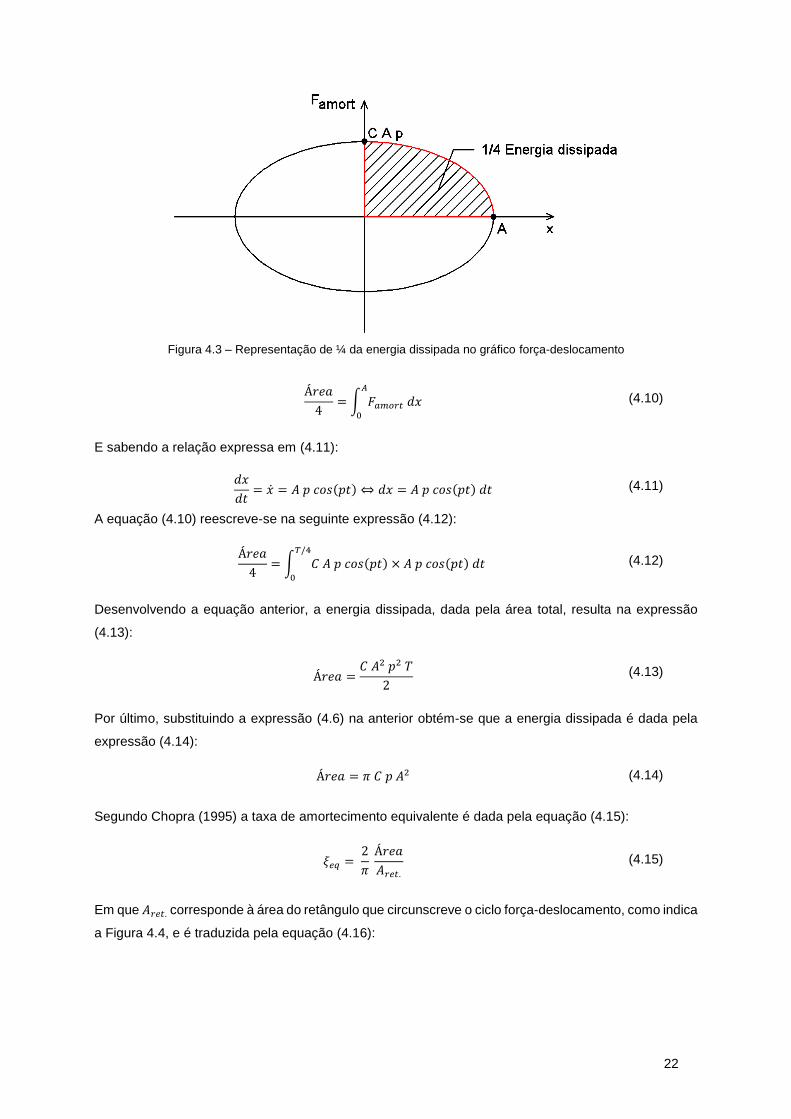
Figura 4.3 – Representação de ¼ da energia dissipada no gráfico força-deslocamento .......... 22
Figura 4.4 – Representação do retângulo que circunscreve o ciclo força-deslocamento [adaptado
de (Chopra, 1995)] ...................................................................................................................... 23
Figura 4.5 – Deslocamento horizontal máximo equivalente no oscilador equivalente de um grau
de liberdade. ................................................................................................................................ 25
Figura 4.6 – Deslocamento relativo entre as extremidades do dissipador. ................................ 25
Figura 4.7 – Ilustração do método proposto. .............................................................................. 27
Figura 4.8 – Fluxograma da metodologia de cálculo proposta. .................................................. 28
Figura 5.1 – Acelerograma artificial (Sismo 1). ........................................................................... 30

xii
Figura 5.2 – Configuração deformada do primeiro modo de vibração de uma estrutura tipo pórtico
[adaptado de (Lopes et al, 2008)]. .............................................................................................. 30
Figura 5.3 – Configuração deformada do primeiro modo de vibração de uma estrutura tipo parede
[adaptado de (Lopes et al, 2008)]. .............................................................................................. 31
Figura 5.4 – Modelo base das estruturas com comportamento misto pórtico-parede (dimensões
em m). ......................................................................................................................................... 32
Figura 5.5 – Modelo computacional do dissipador no programa SAP2000 (Brás, 2015). .......... 33
Figura 6.1 – Evolução, por piso, do deslocamento horizontal da estrutura sem e com dissipadores
viscosos. ...................................................................................................................................... 38
Figura 6.2 – Posicionamento dos dissipadores viscosos nos modelos Mista 5 e Mista 6. ........ 40
Figura 6.3 – Rotação de corpo rígido de um painel inserido numa estrutura com comportamento
do tipo parede.............................................................................................................................. 40
Figura 6.4 – Comportamento de pórtico (corte puro). ................................................................. 41
Figura 6.5 – Relação força-deslocamento nos dissipadores viscosos instalados nos pisos 5, 15
e 20 dos modelos Mista 1 (esq.) e Mista 5 (dir.). ........................................................................ 43
Figura 6.6 – Evolução da força vertical nos pilares. ................................................................... 44
Figura 6.7 – Deformação vertical do pilar de extremidade. ........................................................ 45
Figura 6.8 – Espetro de resposta no Modelos Mista 1, com amortecimento inicial de 5% e com
amortecimento equivalente de 15,4%. ........................................................................................ 46
Figura 6.9 – Inclinação do dissipador com a horizontal. ............................................................. 47
Figura 6.10 – Evolução, por piso, do deslocamento horizontal no modelo Mista 1. ................... 49

xiii
Simbologia
Lista de abreviaturas
EC8 Eurocódigo 8
NP Norma portuguesa
𝑅𝑒𝑑𝑜𝑏𝑗 Redução objetivo
𝑅𝑒𝑑𝑜𝑏𝑡 Redução obtida
Lista de variáveis latinas
𝐴 Amplitude do movimento entre extremidades do dissipador
𝐴𝑟𝑒𝑡. Área do retângulo equivalente
𝐶 Constante do dissipador viscoso
𝑐 Amortecimento do sistema
𝐶𝑐 Coeficiente de amortecimento crítico
𝐶𝑑𝑖𝑠𝑠. Coeficiente de amortecimento do dissipador
𝐶𝑒𝑞 Coeficiente de amortecimento equivalente
𝐸𝑖 Energia dissipada em cada piso
𝐸𝑇𝑂𝑇 Energia dissipada total
𝐹𝑎𝑚𝑜𝑟𝑡 Força de amortecimento
𝐹 Força no dissipador viscoso
𝐹𝑦 Nível de cedência do dissipador histerético
𝑓 Frequência própria cíclica
𝑘 Rigidez
𝐾1 Rigidez inicial do dissipador histerético
𝐾2 Rigidez pós-cedência do dissipador histerético
𝑚 Massa
𝑚𝑒𝑞 Massa do oscilador equivalente de um grau de liberdade
𝑝 Frequência própria angular não amortecida
𝑞 Deslocamento
�̇� Velocidade
�̈� Aceleração
𝑞(𝑡) Forças de inércia
𝑇 Período de vibração
𝑣 Velocidade entre as extremidades do dissipador viscoso
𝑥 Deslocamento
�̇� Velocidade

xiv
Lista de variáveis gregas
𝛼 Parâmetro do dissipador viscoso
𝛤 Constante de transformação
𝛿15,4% Deslocamento horizontal máximo no topo da estrutura com amortecimento equivalente
igual a 15,4%
𝛿𝐶𝐷 Deslocamento horizontal máximo no topo da estrutura com dissipadores
𝛿ℎ,𝑚𝑎𝑥 Deslocamento horizontal máximo no topo da estrutura
𝛿𝑆𝐷 Deslocamento horizontal máximo no topo da estrutura sem dissipadores
∆ Deslocamento
∆𝑒𝑞 Deslocamento horizontal máximo no topo do oscilador equivalente de um grau de
liberdade
∆𝑖 Deslocamento relativo em cada piso
∆𝑟𝑒𝑙 Deslocamento relativo entre as extremidades do dissipador
∆𝐻 Componente horizontal do comprimento do dissipador
∆𝑉 Componente vertical do comprimento do dissipador
𝛥d Deformação do dissipador
𝛥𝑘 Deformação da mola
𝜂 Coeficiente de correção do amortecimento
𝜉 Taxa de amortecimento modal
𝜉𝑖 Taxa de amortecimento modal inicial
𝜉𝑒𝑞 Taxa de amortecimento equivalente
𝜙𝑖 Deslocamento da configuração deformada do primeiro modo de vibração da estrutura
𝜙𝑖,𝑛𝑜𝑟𝑚 Deslocamento modal horizontal normalizando
𝜙𝑡𝑜𝑝𝑜 Deslocamento da configuração modal no topo da estrutura
𝜙𝐻𝑖 Deslocamento horizontal na extremidade do dissipador
𝜙𝑉𝑖 Deslocamento vertical na extremidade do dissipador
𝜓 Coeficiente de minoração das sobrecargas
1
1. Introdução
Neste primeiro capítulo apresenta-se o tema abordado, os principais objetivos, a metodologia sugerida
e ainda a estrutura do presente trabalho.
1.1. Enquadramento
O dimensionamento de estruturas em zonas de sismicidade elevada, como o Chile e o Japão,
despoletou a investigação tecnológica na área da engenharia sísmica, nomeadamente no
desenvolvimento de tecnologias de proteção sísmica de edifícios.
Um evento sísmico é um fenómeno geológico natural imprevisível e é considerado uma das catástrofes
naturais com maior impacto nas sociedades, tanto a nível social como a nível económico. Com o intuito
de minorar os seus efeitos, têm sido desenvolvidas soluções que tornam as estruturas cada vez menos
vulneráveis à ação sísmica.
A proteção sísmica de edifícios pode ser assegurada através de sistemas passivos de dissipação de
energia, sendo o recurso a dissipadores de energia viscosos uma solução que se adequa
especialmente a edifícios altos.
Existem vários exemplos de aplicação por todo o mundo (Net 1), tanto em estruturas novas como no
reforço sísmico de estruturas existentes, através da aplicação dos dissipadores ao longo das fachadas
dos edifícios.
No entanto, os atuais métodos de dimensionamento de sistemas de proteção com dissipadores
viscosos, não permitem estimar o amortecimento adicional, conferido pelos dissipadores à estrutura.
Partindo de um objetivo inicial, geralmente uma determinada redução da resposta sísmica da estrutura,
a ausência de uma estimativa fiável do coeficiente de amortecimento a atribuir a cada dissipador
dificulta o processo de dimensionamento desta solução.
1.2. Objetivos e metodologia
A introdução de dissipadores viscosos numa estrutura altera o seu amortecimento. Partindo do
pressuposto que o amortecimento intrínseco da estrutura é conhecido, procura-se avaliar o incremento
de amortecimento provocado pela aplicação dos mesmos.
O presente trabalho tem como principal objetivo desenvolver um método de cálculo que permita estimar
corretamente o coeficiente de amortecimento que cada dissipador deve ter, de modo a atingir uma
redução predefinida da resposta sísmica da estrutura. Em estudos anteriores, esse coeficiente era
obtido iterativamente, até o objetivo ser alcançado. A abordagem proposta pretende contornar esta
questão. Para o efeito, assume-se que os dissipadores são distribuídos uniformemente pela altura do
edifício.
Partindo de uma determinada redução da resposta sísmica da estrutura, a metodologia de cálculo
permite, de forma simples e prática, estimar o coeficiente de amortecimento de cada dissipador.
Recorre-se à definição de um oscilador equivalente de um grau de liberdade, considerando
exclusivamente a configuração deformada do primeiro modo de vibração da estrutura. É deste modo

2
possível estimar o amortecimento equivalente a uma distribuição uniforme de dissipadores viscosos ao
longo da altura do edifício.
A adoção de sistemas de dissipação de energia, neste caso através de dissipadores viscosos, conduz
à diminuição da resposta sísmica da estrutura. Assim sendo, a análise do deslocamento horizontal
máximo no topo da mesma, sujeita a uma determinada ação sísmica, antes e após a instalação dos
dissipadores viscosos, permite avaliar a metodologia proposta:
1. Em primeiro lugar é determinado o deslocamento horizontal máximo no topo da estrutura sem
dissipadores;
2. É determinado o coeficiente de amortecimento de cada dissipador, através do método de cálculo
proposto;
3. Por fim, é determinado o deslocamento horizontal máximo no topo da estrutura com dissipadores
viscosos.
Deste modo, após a introdução dos dissipadores viscosos, espera-se que a redução da resposta
sísmica da estrutura seja próxima do objetivo predefinido.
Pretende-se ainda identificar o campo de aplicação adequado à metodologia de cálculo. Assim sendo,
o método foi aplicado a um conjunto de seis pórticos planos com comportamento misto pórtico-parede.
O conjunto varia entre o comportamento tipo pórtico puro e o comportamento tipo parede. Os modelos
numéricos foram previamente desenvolvidos (Brás, 2015) com o intuito de avaliar a distribuição ótima
de dissipadores viscosos em edifícios altos.
As estruturas referidas foram modeladas com recurso ao programa de análise numérica SAP2000 (CSI,
2011).
1.3. Organização da dissertação
A dissertação encontra-se organizada em sete capítulos. Primeiramente é realizado o enquadramento
do trabalho, salientando a importância da proteção sísmica em edifícios localizados em zonas de
sismicidade elevada. Apresentam-se os principais objetivos, descreve-se a metodologia proposta e a
organização do documento.
No segundo capítulo apresenta-se o efeito da ação sísmica em edifícios altos. Em primeiro lugar
aborda-se o impacto de fenómenos sísmicos no mundo, e em Portugal, salientando os eventos
relevantes para o desenvolvimento da engenharia sísmica, como a importância da reconstrução de
Lisboa após o sismo de 1755. Destacam-se conceitos como perigosidade e risco sísmico, e define-se
ainda a ação sísmica em Portugal, nomeadamente os tipos de sismo considerados e o espetro de
resposta regulamentar. Refere-se ainda o caso particular dos edifícios altos, as suas principais
características e o tipo de sismo que revela maior impacto nestas estruturas.
O terceiro capítulo contempla uma revisão sobre os sistemas de proteção sísmica existentes,
nomeadamente o caso de dissipadores de energia viscosos. Em primeiro lugar indicam-se alguns
exemplos de técnicas passivas de proteção sísmica em Portugal, e apresenta-se a vasta aplicação de

3
dissipadores viscosos em edifícios por todo o mundo, nomeadamente na América e na Ásia. Por fim,
apresentam-se os três tipos de dissipadores de energia existentes: histeréticos, viscoelásticos e
viscosos. Foca-se o último caso, uma vez que são os dissipadores de energia utilizados na metodologia
de cálculo. Enunciam-se as suas componentes, o seu modo de funcionamento, e os parâmetros que
definem e influenciam o seu comportamento. Aborda-se ainda o estado de conhecimento sobre os
métodos de dimensionamento atuais sobre estes sistemas.
No quarto capítulo descreve-se o método de cálculo desenvolvido e esclarecem-se todos os conceitos
a considerar na utilização do mesmo. Refere-se ainda, a definição do oscilador equivalente de um grau
de liberdade, através da configuração deformada do modo fundamental da estrutura.
O quinto capítulo apresenta o caso de estudo, que consiste num conjunto de seis pórticos planos com
comportamento misto pórtico-parede (Brás, 2015), cuja predominância do efeito de parede aumenta de
forma gradual.
No sexto capítulo confrontam-se os resultados obtidos, relativos à aplicação do método de cálculo
proposto ao caso de estudo.
No último capítulo são enunciadas as principais conclusões do trabalho realizado, e sugerem-se
algumas considerações para desenvolvimentos futuros.

4

5
2. Ação sísmica em edifícios altos
Neste capítulo apresentam-se alguns exemplos de catástrofes provocadas por eventos sísmicos.
Pretende-se, desde modo, alertar para as consequências sociais e económicas inerentes aos mesmos.
Aborda-se ainda, a definição da ação sísmica em Portugal e o caso de edifícios altos. A construção em
altura é cada vez mais solicitada, pelo que é fulcral conhecer o comportamento deste tipo de estruturas.
2.1. Eventos sísmicos
Sismos são fenómenos geológicos naturais imprevisíveis, e que quando ocorrem provocam grande
impacto nas populações, tanto a nível social como económico. Não sendo possível evitar estes
acontecimentos, a solução encontra-se no estudo e na investigação de soluções que tornem as
estruturas resistentes à ação sísmica, reduzindo os seus efeitos.
Existem inúmeros exemplos de catástrofes provocadas por sismos em todo o mundo, sendo que temos
presente os recentes sismos que abalaram Itália. A 24 de Agosto de 2016 Norcia foi atingida por um
sismo de magnitude de 6,2 na escala de Richter que provocou pelo menos 297 vítimas mortais e cerca
de 4000 desalojados, tendo destruído grande parte do edificado das localidades atingidas (Net 2). A
Figura 2.1 demonstra os efeitos devastadores que um sismo pode provocar.
Figura 2.1 – Cenário de destruição provocado pelo sismo em Norcia, Itália 2016 (Net 3).
Num passado recente, em 2010, o sismo que afetou o Haiti com uma magnitude estimada de 7,0,
provocou a morte de cerca de 316000 pessoas e 1,3 milhões de desalojados, sendo uma das maiores
catástrofes do século XXI (Net 4).
Portugal, como ilustra a Figura 2.2, localiza-se na placa Euro-Asiática, limitada a sul pela falha Açores-
Gibraltar e a oeste pela falha dorsal do oceano atlântico, situando o país numa zona de sismicidade
importante, sendo a sua atividade sísmica resultante tanto de fenómenos interplacas como de
fenómenos intraplacas.

6
Figura 2.2 – Localização de Portugal no contexto da tectónica de placa (Net 5).
Ao longo do tempo, Portugal Continental tem sido afetado por sismos de magnitude moderada a forte,
resultando em danos e perdas muito significativas. O maior exemplo é o sismo que ocorreu a 1 de
novembro de 1755, em Lisboa, com uma magnitude estimada de 8,75 na escala de Richter (Net 5),
resultante de movimentos interplacas, que provocou a destruição de toda a baixa de Lisboa e a perda
de inúmeras vidas humanas.
A reconstrução de Lisboa foi inovadora por ser pioneira na construção antissísmica, através da Gaiola
Pombalina (Figura 2.3 - esquerda). Este sistema consiste numa estrutura tridimensional treliçada de
madeira, cujos painéis resistem muito bem às forças aplicadas no seu plano. A estrutura tridimensional
da Gaiola normalmente não é visível uma vez que os espaços entre as barras de madeira estão
preenchidos com alvenaria, formando as paredes de frontal (Figura 2.3 – direita) (Bento & Lopes, 2005).
Figura 2.3 – Gaiola pombalina: maquete (esquerda) e parede frontal com enchimento de alvenaria (direita).
Como já referido, para além do movimento interplacas, a atividade sísmica causada pela própria placa
tectónica, onde se localiza Portugal continental, é relevante. Em Benavente, o sismo de 1909 de
magnitude 6,7 provocou dezenas de mortos e prejuízos significativos, tendo origem numa falha do vale
inferior do Tejo.
Para além da atividade sísmica sentida em Portugal Continental, o arquipélago dos Açores apresenta
um grande número de sismos ao longo do tempo, decorrentes da atividade vulcânica e tectónica da
crista atlântica.
A perigosidade sísmica em Portugal é assim considerada moderada, no entanto o risco sísmico é
considerável. A densidade populacional elevada, a concentração das populações em zonas urbanas
7
de sismicidade importante, e o grande número de edificado com fraca resistência sísmica são alguns
dos fatores que contribuem para o aumento do risco sísmico (Net 5).
O risco sísmico é medido pelas perdas económicas e humanas esperadas devido a eventuais sismos
futuros, e pela probabilidade dos mesmos ocorrerem (Net 6). A perigosidade, a exposição e a
vulnerabilidade são os fatores que permitem definir o risco sísmico (Sousa, 2008).
A probabilidade de um sismo ocorrer, num determinado local, com uma determinada magnitude, define-
se como perigosidade, e depende apenas de fenómenos naturais, não sendo possível intervenção
humana neste aspeto. A exposição de pessoas e bens relaciona-se com o valor económico e social da
região em causa (Lopes et al, 2008), o que torna este um fator de difícil intervenção, visto que os locais
onde se situam as grandes metrópoles não foram escolhidos considerando o seu risco sísmico. Por
fim, a vulnerabilidade exprime-se através dos danos causados por um sismo numa determinada
estrutura.
2.2. Definição da ação sísmica em Portugal
A ação sísmica a utilizar no dimensionamento e na verificação de segurança de estruturas pode ser
definida por espetros de resposta. Estes estabelecem os valores mínimos de resistência que as
estruturas devem garantir, tendo em conta a sismicidade do local. O espetro de resposta corresponde
a uma curva que traduz a resposta máxima da estrutura, através da aceleração ou do deslocamento,
em função da frequência própria do oscilador equivalente de um grau de liberdade (Guerreiro, 2016).
A definição da ação sísmica regulamentar é conseguida através do espetro de resposta elástico,
definido através do valor de pico da aceleração do solo, em função da sismicidade do local, das
características do solo de fundação, do coeficiente de amortecimento da estrutura e de um conjunto de
valores de períodos de referência, que permitem a adaptação do espetro a um determinado tipo de
solo, e a um determinado tipo de ação sísmica. Estes períodos de referência têm como principal função
limitar as zonas do espetro de resposta com características específicas.
Como indicado, para caracterizar o espetro de resposta é necessário conhecer o solo de fundação da
estrutura, sendo que estão definidos sete tipos de terrenos baseados em valores de velocidades médias
de propagação das ondas de corte em perfis estratigráficos tipo (CEN, 2010).
Atualmente a regulamentação NP EN 1998-1 (CEN, 2010) indica dois tipos de sismos de
dimensionamento. O sismo tipo 1 refere-se a um cenário de geração de sismos designado de
“afastado”, com epicentro na região Atlântica, de magnitude elevada e a grande distância focal
(fenómenos interplacas). Já o sismo tipo 2 refere-se a um cenário de geração de sismos nomeado de
“próximo”, com epicentro no território Continental ou no Arquipélago dos Açores, com menor magnitude
e a pequena distância focal (fenómenos intraplacas).
A estes dois tipos de sismos correspondem dois mapas distintos para Portugal Continental (Figura 2.4),
definidos pela perigosidade sísmica do local e indicados no Anexo Nacional da NP EN 1998-1 (CEN,
2010). Em ambos os casos é observado que o sul do país é a zona com maior perigosidade sísmica.

8
É também de salientar que no arquipélago da Madeira apenas se toma em consideração a ação sísmica
tipo 1, enquanto no arquipélago dos Açores apenas a ação sísmica tipo 2.
Figura 2.4 – Zonamento sísmico regulamentar em Portugal continental – esquerda: sismo tipo 1 (afastado); direita: sismo tipo 2 (próximo) (CEN, 2010).
A
A energia que é libertada por um evento sísmico dissipa-se a partir do seu epicentro, de forma mais
evidente nas componentes de mais baixo período das ondas sísmicas, do que nas correspondentes
aos altos períodos de vibração (Guerreiro, 2016). Para magnitudes da mesma ordem de grandeza, um
sismo afastado apresenta maior energia nos períodos de vibração mais elevados (frequências de
vibração mas baixas). Consequentemente é possível prever para uma determinada estrutura qual o
tipo de sismo mais condicionante, um sismo afastado ou um sismo próximo.
Um edifício alto caracteriza-se por ser uma estrutura flexível e consequentemente por elevados
períodos de vibração, ao contrário de uma estrutura rígida que apresenta períodos de vibração
inferiores. Por conseguinte, um edifício alto, caraterizado por baixas frequências, é mais afetado por
um sismo tipo 1 (afastado) de magnitudes elevadas, do que por um sismo tipo 2 (próximo) de magnitude
inferior.
A Figura 2.5 representa dois espetros de resposta elásticos de acelerações, correspondentes a cada
tipo de sismo, localizados em Lisboa, em solo do Tipo B, considerando um coeficiente de
amortecimento de 5%. Como se observa, o sismo tipo 1 (afastado) para períodos mais baixos apresenta
valores de aceleração inferiores aos do sismo tipo 2 (próximo), apesar do primeiro normalmente exibir
maior magnitude.

9
Analisando a figura anterior e considerando o caso de uma estrutura flexível, como é o caso de edifícios
altos, caracterizada por períodos de vibração elevados, verifica-se que o sismo afastado é o mais
condicionante. Contrastando, verifica-se que a ação sísmica tipo 2 é a mais condicionante para o caso
de estruturas com períodos de vibração reduzidos, como é o caso de estruturas rígidas.
Figura 2.5 – Espetro de resposta de acelerações para um sismo afastado (tipo 1) e próximo (tipo 2) localizado em Lisboa (Guerreiro, 2016).

10

11
3. Sistemas de proteção sísmica
Neste capítulo apresenta-se uma revisão sobre as técnicas passivas de proteção sísmica existentes, e
ainda alguns exemplos de aplicação.
A presente dissertação foca essencialmente o caso dos dissipadores viscosos, pelo que será
apresentada uma descrição mais detalhada dos mesmos. Aborda-se ainda o estado de conhecimento
sobre o dimensionamento deste tipo de sistemas de proteção sísmica.
As consequências devido a fenómenos sísmicos podem ser catastróficas, provocando perdas de vidas
humanas e bens, como visto previamente. Não é possível evitar a sua ocorrência, mas atualmente o
desenvolvimento tecnológico e os avanços científicos na área de engenharia sísmica permitem mitigar
os seus efeitos.
Atualmente a conceção de estruturas assenta em regulamentos que garantem um bom desempenho
das estruturas em serviço, garantindo a sua segurança na ocorrência de sismos. No entanto, grande
parte das estruturas existentes foram dimensionadas sem considerar a ação sísmica, e
consequentemente sem assegurar a resistência mínima necessária (Net 7).
A diminuição da vulnerabilidade das estruturas pode ser obtida pela redução da resposta sísmica das
mesmas, através do recurso a sistemas de dissipação de energia. Este tipo de proteção sísmica tornou-
se acessível através do investimento e investigação nesta área, sendo utilizado em Portugal,
especialmente em pontes (Guerreiro, 2006).
O comportamento sísmico das estruturas pode assim ser melhorado através de sistemas de proteção
sísmica por duas vias: pela alteração das características dinâmicas da própria estrutura ou pelo
aumento da capacidade de dissipação de energia da mesma. Estes sistemas são classificados como
passivos, ativos ou semiativos. Os sistemas de proteção sísmica passivos contemplam os dissipadores
de energia, o isolamento de base e as ligas com memória de forma, caraterizados por não necessitarem
de energia fornecida do exterior. Os sistemas ativos, por outro lado, requerem uma fonte de energia
para controlar o movimento da estrutura. Por último, os sistemas semiativos apenas precisam de
energia para modificar as características dos dispositivos (Guerreiro, 2011b).
3.1. Exemplos de aplicação de sistemas passivos de proteção sísmica
Em Portugal, é recorrente encontrar soluções de dissipação de energia em obras de arte e viadutos,
uma vez que os danos provocados por sismos em redes de transportes são significativos, relativamente
aos prejuízos económicos causados (Guerreiro, 2011a).
Como exemplo, tem-se o caso da Ponte Vasco da Gama em Lisboa e o Viaduto de Alhandra. O primeiro
caso refere-se a uma construção nova onde foram introduzidos dissipadores histeréticos, enquanto o
segundo trata-se de um projeto de reforço sísmico através da instalação de dissipadores viscosos
(Figura 3.1).

12
Figura 3.1 – Pormenorização do dissipador viscoso instalado no Viaduto de Alhandra (adaptado de Appleton et al., 2003).
É importante realçar o exemplo do Hospital da Luz em Lisboa, uma vez que é o primeiro edifício em
Portugal construído com um sistema de proteção sísmica, através do isolamento de base. De forma a
tornar a estrutura resistente à ação dos sismos, e isolar as vibrações provocadas pelo metropolitano,
adotaram-se blocos de borracha de alto amortecimento (Figura 3.2), ou seja, aparelhos de apoio entre
a fundação e os elementos verticais da estrutura, isolando-a dos movimentos do solo (Ferreira, 2006).
Figura 3.2– Bloco de borracha de alto amortecimento, Hospital da Luz, Lisboa. (adaptado de Ferreira, 2006).
O isolamento de base ganhou importância quando o edifício “West Japan Postal Savings Computer
(West-1)” revelou um bom desempenho perante o sismo de Kobe em 1995 (7,2 na escala de Richter),
uma vez que as acelerações no topo do edifico foram reduzidas para mais de metade das acelerações
verificadas ao nível da fundação (Guerreiro, 2011b).
A aplicação de dissipadores viscosos em edifícios é uma solução muito utilizada para conferir
resistência sísmica aos mesmos, existindo inúmeros exemplos por todo o mundo, com maior incidência
na América e na Ásia (Net 1). A primeira utilização de dissipadores viscosos data de 1995, nos EUA,
numa estrutura metálica de 3 pisos (Figura 3.3).

13
Figura 3.3 – “Pacific Bell North Area Operation Center”, USA, Sacramento, CA (Net 8).
A Tabela 3.1 ilustra algumas aplicações recentes de dissipadores viscosos para melhorar o
comportamento de edifícios em relação à ação sísmica. Até à data, cerca de 650 estruturas
relacionadas com engenharia civil utilizam esta tecnologia, nomeadamente em edifícios (Net 1).
Tabela 3.1 – Aplicação de dissipadores viscosos em edifícios (adaptado de Net 1).
Estrutura Local Data
Uni-President Prince Worldvista Taiwan, Xinbei City 2016
LDS Temple Concepcion Chile, Concepcion 2016
Oscar Nanjing Building Taiwan, Taipei 2016
Washington Hospital USA, Fremont, CA 2015
Banco De La Nacion Building Peru, Lima 2015
29 Palms Naval Hospital USA, 29 Palms, CA 2015
Em Portugal ainda não existem exemplos de edifícios com dissipadores viscosos instalados,
possivelmente devido à falta de regulamentação sobre este tema e ao aumento do custo inicial da
estrutura. No entanto, a diminuição significativa dos danos provocados por um eventual sismo na
estrutura compensa o esforço económico inicial.
3.2. Dissipadores de energia
Os dissipadores de energia enquadram-se no grupo de sistemas de proteção sísmica passivos, ou seja,
que não precisam de fornecimento de energia do exterior. Estes dispositivos permitem que a estrutura
adquira capacidade de dissipação de energia, devendo ser colocados de modo a acompanhar o
movimento da estrutura, maximizando a deformação nos dissipadores e otimizando o funcionamento
dos mesmos (Guerreiro, 2011b). A escolha dos dissipadores de energia tem como objetivo dissipar a
energia transmitida pelo sismo à estrutura, impedindo que esta absorva a energia através de
deformações acentuadas (Lopes et al, 2008). A Figura 3.4 sugere alguns exemplos da colocação de
dissipadores de energia em estruturas.

14
Figura 3.4 – Exemplos de colocação dos dissipadores (Guerreiro, 2011b).
Os sistemas de dissipação de energia conduzem ao aumento do amortecimento global da estrutura e
consequentemente ao aumento da capacidade de dissipação de energia da mesma. Por conseguinte,
permitem reduzir os deslocamentos da estrutura e as acelerações impostas (Lopes et al, 2008).
Os dissipadores de energia podem classificar-se por viscoelásticos, viscosos ou histeréticos, sendo os
dois últimos os mais utilizados atualmente, tanto pela sua versatilidade, como pela facilidade com que
se introduzem no sistema estrutural, visto que oferecem ao projetista grande liberdade na definição das
suas características (Guerreiro, 2006). A sua classificação resulta do comportamento e da relação
constitutiva que cada um apresenta.
3.2.1. Dissipadores histeréticos
Os sistemas histeréticos de dissipação de energia beneficiam da capacidade de deformação plástica
de elementos metálicos, nomeadamente o aço. A força reativa do dispositivo depende da deformação
imposta ao mesmo, sendo os parâmetros de controlo a rigidez inicial (𝐾1), a rigidez após-cedência
(𝐾2) e o nível de cedência (𝐹𝑦) (Guerreiro, 2006). O comportamento dos dissipadores histeréticos
ilustra-se na seguinte Figura 3.5.
Figura 3.5 – Gráfico força-deslocamento para dissipadores histeréticos (Guerreiro, 2006).
Em Portugal, como já referido, é possível encontrar este tipo de dissipador na Ponte Vasco da
Gama em Lisboa, como ilustra a Figura 3.6.
15
Figura 3.6 – Dissipador histerético aplicado na Ponte Vasco da Gama (Guerreiro, 2006).
3.2.2. Dissipadores viscoelásticos
Os dissipadores viscoelásticos recorrem a polímeros, permitindo que a dissipação de energia se dê em
função do deslocamento elástico e da velocidade. Estes dispositivos assemelham-se a pequenas
pastilhas retangulares que se deformam por corte (Figura 3.7).
Figura 3.7 – Aplicação de dissipadores viscoelásticos na escola “Gentile Fermi” em Ancona, Itália (Guerreiro, 2011b).
3.2.3. Dissipadores viscosos
A presente dissertação aborda essencialmente o caso dos dissipadores viscosos, pelo que será
apresentada uma descrição mais detalhada destes dispositivos.
O funcionamento dos dissipadores viscosos baseia-se na lei da mecânica de fluidos, usando a
capacidade de dissipar energia através da aplicação de uma força ao longo de um deslocamento finito.
Aquando da ação sísmica, a energia gerada pela aceleração imposta é transmitida ao dissipador, que
força a passagem de um fluido de alta viscosidade através de orifícios muito pequenos, utilizando um
sistema cilindro-pistão, como mostra a Figura 3.8.
Figura 3.8 – Esquema das componentes de um dissipador viscoso [adaptado de (Taylor, 2010)].
16
O pistão pode movimentar-se livremente em ambos os sentidos, criando duas câmaras.
Consequentemente, a força de amortecimento é proporcional à diferença de pressão nessas duas
câmaras (Taylor, 2010). A energia mecânica dissipada pelo amortecedor provoca o aquecimento das
peças mecânicas e dos fluidos do dispositivo. A mesma energia é transferida para o meio ambiente
através de mecanismos de transporte, nomeadamente convecção e condução (Taylor, 2010).
Taylor (2010) apresenta inúmeras vantagens significativas dos dissipadores viscosos,
comparativamente a outros dispositivos de dissipação de energia:
1) Permitem a redução de esforços e deformações da estrutura.
2) São autossuficientes, não sendo necessário qualquer equipamento auxiliar ou energia fornecida
pelo exterior.
3) Atualmente operam a um nível de pressão significativo, que conduz a um dispositivo pequeno,
compacto e de fácil instalação.
4) Reduzem o custo global da estrutura, particularmente quando utilizados em estruturas com
coeficientes de amortecimento elevados.
A força gerada no dissipador depende do valor da velocidade relativa entre as extremidades do mesmo,
provocada pela ação sísmica, afetado do parâmetro α, que varia entre 0,2 e 2,0. Este parâmetro
relaciona-se com a quantidade de energia dissipada por ciclo de funcionamento, ou seja, quanto maior
α, menor a energia dissipada (Branco, 2006). Cada dissipador, consoante as características do fluido
utilizado, apresenta uma relação força-velocidade que pode ser dada pela expressão (3.1) (Guerreiro,
2006).
𝐹 = 𝐶 |𝑣|𝛼𝑠𝑖𝑛𝑎𝑙(𝑣) (3.1)
Em que:
𝐶, α – Constantes do dissipador,
𝑣 – Velocidade entre as extremidades do dissipador.
Por observação da Figura 3.9 verifica-se que o parâmetro α influencia de forma relevante a relação
força-velocidade dos dissipadores. Quanto maior for a força do dissipador, maior a sua capacidade de
dissipação de energia. Para valores reduzidos de α, a força no dissipador é elevada para baixas
velocidades, traduzindo-se assim num dispositivo com grande capacidade de dissipação de energia. O
aumento do parâmetro α, também para velocidades reduzidas, conduz a forças no dissipador quase
nulas, e consequentemente a uma capacidade de dissipação inferior.

17
Figura 3.9 – Influência do parâmetro α na relação força-velocidade do dissipador (Guerreiro, 2006).
A capacidade de dissipação de energia em cada ciclo traduz-se no amortecimento que o dissipador
confere à estrutura. Segundo Guerreiro (2006), a energia dissipada é dada pela área interior do ciclo
medida no gráfico força-deslocamento do dissipador, como exibe a Figura 3.10.
Figura 3.10 – Relação força-deslocamento do dissipador (Guerreiro, 2006).
a
A Figura 3.11 demonstra tanto a relação força-velocidade como a relação força-deformação, em função
do parâmetro 𝛼. Conclui-se assim que, quanto menor for α, maior será a capacidade de dissipação de
energia do dissipador viscoso, ou seja, mais “retangular” será a área do ciclo e por isso maior será a
dissipação de energia do sistema.
Figura 3.11– Influência do parâmetro α na relação força-velocidade e na relação força-deslocamento do
dissipador (Guerreiro, 2006).
No caso dos dissipadores viscosos, para o mesmo valor do parâmetro 𝛼, o parâmetro 𝐶 aumenta a
área interna do ciclo força-deformação e relaciona-se proporcionalmente com a dissipação de energia.
Quanto maior for 𝐶, maior será a capacidade de dissipação de energia do dissipador, e
consequentemente maior a força do dissipador (Figura 3.12).

18
Figura 3.12 – Influência do parâmetro C na relação força-deformação do dissipador (Guerreiro, 2006).
O comportamento dos dissipadores viscosos é traduzido pela equação não linear (3.1) sendo que
quando 𝛼 = 1,0 a força e a velocidade no dissipador assumem um comportamento linear, facilitando a
análise da resposta.
A avaliação da resposta de uma estrutura com dissipadores viscosos é conseguida através de uma
análise dinâmica não linear no domínio do tempo. Para tal, caracteriza-se a ação sísmica através de
uma série de acelerações ao longo do tempo, sendo esta a forma mais direta de analisar o
comportamento da estrutura.
Assim sendo, define-se uma série de acelerogramas artificiais compatíveis com a ação sísmica do local
em causa, a partir da sobreposição de séries harmónicas (Guerreiro, 2016). Recomenda-se o recurso
a 10 séries de acelerações diferentes, de forma a obter uma representação da ação sísmica o mais
próximo possível da realidade.
O recurso a dissipadores viscosos, para atingir uma determinada redução da resposta sísmica da
estrutura, apesar de muito solicitada, levanta diversas questões que devem ser consideradas de forma
a definir corretamente este tipo de sistema.
Os métodos de dimensionamento existentes, partindo do amortecimento inicial da estrutura, não
definem o nível de amortecimento que a mesma atinge após a aplicação de dissipadores viscosos
(Occhiuzzi, 2009). Antes de determinar o número de dispositivos, a sua dimensão e a sua localização
ótima, é fundamental conhecer o amortecimento adicional que estes transmitem à estrutura. Isto é,
estimar o amortecimento que o conjunto de dissipadores confere à estrutura. A análise dos métodos
de dimensionamento atuais revela que os modos de vibração superiores apresentam pouca influência
na conceção de sistemas com dissipadores viscosos.
A aplicação de dissipadores viscosos numa estrutura pode fornecer um amortecimento viscoso
complementar ao modo fundamental da mesma, isto é, ao modo correspondente ao período de
vibração mais alto (Taylor 2010). A adoção destes dispositivos pode ainda provocar o aumento de
amortecimento e rigidez nos modos de vibração superiores. O autor conclui que estes fatores podem
conduzir à completa eliminação da contribuição dos mesmos para a resposta global da estrutura.
O modo fundamental de uma estrutura corresponde ao modo de vibração com menor frequência e,
portanto, é mobilizado com maior facilidade, e apresenta ainda os maiores deslocamentos para a
mesma ação (Lopes et al, 2008). Assim sendo, a resposta dinâmica de uma estrutura revela grande
influência do primeiro modo de vibração.

19
4. Metodologia de cálculo
Neste capítulo descreve-se a metodologia de cálculo proposta, que consiste na estimativa do
coeficiente de amortecimento que é necessário obter através da aplicação de dissipadores viscosos. A
metodologia é baseada nos conceitos teóricos abordados e será aplicada ao caso de estudo
apresentado no capítulo 5.
Definido o objetivo que se pretende atingir com a instalação dos dissipadores viscosos na estrutura,
neste caso uma determinada redução na resposta sísmica da mesma, a abordagem de cálculo permite
uma estimativa fiável do coeficiente de amortecimento necessário para este objetivo. Para o efeito,
assume-se que os dissipadores são distribuídos uniformemente ao longo da altura do edifício, ou seja,
o valor do coeficiente de amortecimento é igual em todos os pisos. A atribuição deste valor a cada um
dos dissipadores viscosos permitirá que o deslocamento horizontal máximo no topo da estrutura seja
reduzido para o deslocamento objetivo. É ainda de notar que é considerado apenas um dissipador por
piso.
A definição da força no dissipador viscoso e a sua capacidade de dissipação de energia são aspetos a
ter em consideração na definição da metodologia apresentada. O conhecimento atual sobre sistemas
de proteção sísmica com recurso a dissipadores viscosos revela também que a contribuição dos modos
de vibração superiores pode ser desprezada, e ainda que os primeiros modos de vibração são
relevantes para a resposta dinâmica da estrutura (Occhiuzzi, 2009; Taylor, 2010). Por conseguinte, a
metodologia proposta considera exclusivamente a configuração deformada do primeiro modo de
vibração da estrutura.
Desta forma, é possível definir, com base na configuração deformada do modo fundamental da
estrutura, um oscilador equivalente de um grau de liberdade, permitindo uma análise simplificada da
mesma.
Como referido anteriormente, o método proposto considera que a estrutura apresenta um
comportamento linear, assim como os dissipadores viscosos, ao considerar o parâmetro α unitário.
A validação da metodologia de cálculo tem por base a comparação entre o deslocamento horizontal
máximo no topo de uma estrutura, sujeita a uma determinada ação sísmica, antes e após a instalação
dos dissipadores viscosos. Em primeiro lugar obtém-se o deslocamento da estrutura sem dissipadores;
seguidamente recorre-se à metodologia de cálculo para determinar o coeficiente de amortecimento a
adotar em cada dissipador; e por último obtém-se os deslocamentos da mesma estrutura, mas com
dissipadores viscosos. O valor do deslocamento resulta da média dos valores máximos dos
deslocamentos obtidos para cada um dos acelerogramas, considerados no cálculo.
Seguidamente apresentam-se, de forma pormenorizada, as etapas que constituem a metodologia de
cálculo proposta.

20
4.1. Oscilador equivalente de um grau de liberdade
Neste modelo equivalente pretende-se estimar as necessidades de amortecimento num edifício com
dissipadores viscosos. Para o efeito, com base num sistema de um grau de liberdade (SDOF – Single
Degree-of-freedom) com uma determinada massa concentrada num único ponto, considera-se apenas
o movimento horizontal da mesma. A Figura 4.1 ilustra um exemplo de um sistema desse tipo.
Figura 4.1 – Modelo de um oscilador de um grau de liberdade.
O movimento deste sistema traduz-se numa equação diferencial linear de 2º grau, não homogénea,
baseada no princípio de d’Alembert que, através da 2ª lei de Newton, enuncia que quando uma massa
𝑚 é afastada da sua posição de repouso surgem forças de inércia proporcionais à aceleração dessa
mesma massa �̈�(𝑡) (J. Azevedo e J. Proença, 1991).
A equação de movimento ou equilíbrio dinâmico (4.1) da resposta de um oscilador de um grau de
liberdade, na ausência de ação exterior, é dada por:
𝑚 �̈� + 𝑐 �̇� + 𝑘 𝑞 = 0 (4.1)
Sendo 𝑚, 𝑐 e 𝑘 a massa, o amortecimento e a rigidez do sistema, respetivamente.
Dividindo todos os termos pela massa 𝑚 tem-se (4.2)
�̈� + 2 𝜉 𝑝 �̇� + 𝑝2 𝑞 = 0 (4.2)
em que 𝜉 representa o coeficiente de amortecimento 𝐶 adimensionalizado ao coeficiente de
amortecimento crítico 𝐶𝑐 (4.3) , e 𝑝 traduz a frequência da resposta na ausência de amortecimento
(4.4)
𝜉 = 𝐶
𝐶𝑐=
𝐶
2 𝑚 𝑝 (4.3)
𝑝 = √𝑘
𝑚 (4.4)
A frequência própria cíclica 𝑓 depende da frequência própria angular não amortecida 𝑝 e pode ser
obtida pela expressão (4.5)

21
𝑓 = 𝑝
2 𝜋=
1
2 𝜋 √𝑘
𝑚 (4.5)
O período 𝑇 é dado pelo inverso da frequência própria cíclica 𝑓, que se traduz por (4.6):
𝑇 =1
𝑓= 2 𝜋
𝑝 (4.6)
Admitindo que o sistema tem uma resposta do tipo sinusoidal, resulta que o deslocamento (4.7) e a
velocidade (4.8) do mesmo são dados por:
𝑥 = 𝐴 𝑠𝑖𝑛(𝑝𝑡) (4.7)
�̇� = 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) (4.8)
Co
Em que, 𝐴 corresponde à amplitude de movimento.
Sabe-se ainda que a força no dissipador é dada pela expressão (3.1), pelo que a força de
amortecimento pode ser expressa pela equação (4.9):
𝐹𝑎𝑚𝑜𝑟𝑡 = 𝐶 �̇� = 𝐶 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) (4.9)
Como referido na secção 3.2.3, nos dissipadores viscosos a energia dissipada corresponde à área
interior do ciclo medido no gráfico força-deslocamento, como mostra a Figura 4.2. A área total
corresponde a um ciclo com um determinado período 𝑇.
Figura 4.2 – Representação da energia dissipada no gráfico força-deslocamento.
C
Considerando apenas um quarto da área, como ilustra a seguinte Figura 4.3, tem-se que a energia
dissipada ao longo de um quarto do ciclo, ou seja, durante um período de 𝑇/4, é dada pela equação
(4.10).
22
Figura 4.3 – Representação de ¼ da energia dissipada no gráfico força-deslocamento
Á𝑟𝑒𝑎
4= ∫ 𝐹𝑎𝑚𝑜𝑟𝑡 𝑑𝑥
𝐴
0
(4.10)
E sabendo a relação expressa em (4.11):
𝑑𝑥
𝑑𝑡= �̇� = 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) ⇔ 𝑑𝑥 = 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) 𝑑𝑡 (4.11)
A equação (4.10) reescreve-se na seguinte expressão (4.12):
Á𝑟𝑒𝑎
4= ∫ 𝐶 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) × 𝐴 𝑝 𝑐𝑜𝑠(𝑝𝑡) 𝑑𝑡
𝑇/4
0
(4.12)
Desenvolvendo a equação anterior, a energia dissipada, dada pela área total, resulta na expressão
(4.13):
Á𝑟𝑒𝑎 =𝐶 𝐴2 𝑝2 𝑇
2 (4.13)
Por último, substituindo a expressão (4.6) na anterior obtém-se que a energia dissipada é dada pela
expressão (4.14):
Á𝑟𝑒𝑎 = 𝜋 𝐶 𝑝 𝐴2 (4.14)
Segundo Chopra (1995) a taxa de amortecimento equivalente é dada pela equação (4.15):
𝜉𝑒𝑞 = 2
𝜋 Á𝑟𝑒𝑎
𝐴𝑟𝑒𝑡. (4.15)
Em que 𝐴𝑟𝑒𝑡. corresponde à área do retângulo que circunscreve o ciclo força-deslocamento, como indica
a Figura 4.4, e é traduzida pela equação (4.16):

23
Figura 4.4 – Representação do retângulo que circunscreve o ciclo força-deslocamento [adaptado de (Chopra, 1995)]
𝐴𝑟𝑒𝑡. = 4 𝑘 𝐴 𝐴 = 4 𝑘 𝐴2 (4.16)
Deste modo, ao desenvolver a equação (4.15), o coeficiente de amortecimento equivalente resulta na
expressão (4.17):
𝐶𝑒𝑞 = 2 𝜉𝑒𝑞 𝑚𝑒𝑞 𝑝1 (4.17)
Em que 𝑚𝑒𝑞 e 𝑝1 são, respetivamente, a massa do oscilador equivalente de um grau de liberdade e a
frequência própria da estrutura associada ao primeiro modo de vibração.
Para determinar o coeficiente de amortecimento equivalente 𝐶𝑒𝑞, é em primeiro lugar necessário definir
a taxa de amortecimento equivalente 𝜉𝑒𝑞 a adotar na estrutura. Para o efeito, assumiu-se como ponto
de partida o valor obtido pela expressão que determina o coeficiente de correção do amortecimento
(4.18) preconizado em 3.2.2.2 pelo EC8-1 (CEN, 2010).
Note-se que esta expressão traduz o amortecimento de um sistema de um grau de liberdade, para um
coeficiente de correção do amortecimento superior ou igual a 0,55. Esta expressão serve apenas como
suporte à estimativa do amortecimento equivalente de uma distribuição uniforme de dissipadores
viscosos.
Conhecendo o objetivo a atingir na resposta da estrutura com os dissipadores, isto é, a redução, em
percentagem, na resposta sísmica com a instalação dos dissipadores viscosos, dada por (1 − 𝜂), é
possível determinar a taxa de amortecimento modal 𝜉 que a estrutura com os dissipadores instalados
deve possuir.
Considerou-se para a estrutura sem dissipadores um amortecimento intrínseco de 5%, correspondente
a um edifício corrente de betão armado, cuja deformação máxima devido à ação sísmica conduz a uma
fendilhação excessiva no betão. Por outro lado, para a estrutura com dissipadores, tendo em conta que
estes dispositivos introduzem melhorias significativas no controlo da deformação, considerar um
𝜂 = √10
5 + 𝜉 ≥ 0,55 (4.18)
24
amortecimento inicial de 5% seria exagerado. Assim sendo, assume-se um amortecimento intrínseco
de 2% para as estruturas com dissipadores viscosos.
É importante ter em consideração que o valor de 𝜉 obtido da equação (4.18) já inclui o amortecimento
intrínseco da estrutura (𝜉𝑖). Posto isto, o valor da taxa de amortecimento equivalente a utilizar na
expressão (4.17), que permite determinar o coeficiente de amortecimento equivalente, é dado pela
seguinte equação (4.19):
{
𝜉𝑒𝑞 = 𝜉 − 𝜉𝑖𝐴
𝜉𝑖 = 2%
(4.19)
em que, 𝜉𝑖 corresponde ao amortecimento inicial da estrutura.
A taxa de amortecimento equivalente (𝜉𝑒𝑞) representa, desta forma, o amortecimento a atingir pela
introdução dos dissipadores viscosos.
A definição de um oscilador equivalente de um grau de liberdade utilizado neste trabalho baseia-se no
modelo utilizado em análises estáticas tipo pushover. Este tipo de análise baseia-se na hipótese de que
a resposta de uma estrutura pode ser relacionada com a resposta de um oscilador equivalente de um
grau de liberdade. Para tal, é considerado que a resposta é controlada por um único modo de vibração,
e que a configuração deformada do mesmo é constante ao longo do tempo (Krawinkler, 1998). Os
pressupostos apresentados conduzem a boas previsões da máxima resposta sísmica de um sistema
de vários graus de liberdade (MDOF – Multi Degree-of-freedom).
Considerando então que o primeiro modo de vibração controla a resposta sísmica da estrutura, é
possível definir o oscilador equivalente de um grau de liberdade.
Assumindo um modelo em que a massa é igual em cada piso, a massa equivalente 𝑚𝑒𝑞 é dada pela
equação (4.20).
𝑚𝑒𝑞 = 𝑚∑𝜙𝑖 (4.20)
Sendo 𝜙𝑖 o deslocamento horizontal, em cada piso, associado à configuração deformada do primeiro
modo de vibração da estrutura.
Considerando as seguintes equações (4.21) e (4.22):
𝛤 =𝑚𝑒𝑞
∑𝑚𝑖𝜙𝑖2 (4.21)
∆𝑒𝑞=𝜙𝑡𝑜𝑝𝑜
𝛤 (4.22)
em que 𝛤 corresponde à constante de transformação, e ∆𝑒𝑞 ao deslocamento horizontal máximo no
topo do oscilador equivalente de um grau de liberdade, como mostra a Figura 4.5.

25
Figura 4.5 – Deslocamento horizontal máximo equivalente no oscilador equivalente de um grau de liberdade.
Efetuou-se uma normalização dos deslocamentos horizontais modais da estrutura, associados ao
primeiro modo de vibração da mesma, assumindo que deslocamento horizontal máximo no topo da
estrutura é unitário (𝜙𝑡𝑜𝑝𝑜 = 1).
Uma vez que se considerou a massa 𝑚 igual em todos os pisos, a equação (4.21) reescreve-se na
seguinte expressão (4.23).
𝛤 =∑𝜙𝑖
∑𝜙𝑖2
(4.23)
4.2. Coeficiente de amortecimento do dissipador
O cálculo do coeficiente de amortecimento a adotar em cada um dos dissipadores (𝐶𝑑𝑖𝑠𝑠) considera a
deformação entre as extremidades do dissipador.
Em primeiro lugar, através de uma análise modal, determina-se, para cada piso, o deslocamento
relativo entre as extremidades do dissipador (𝛥𝑟𝑒𝑙,𝑖), associado ao modo fundamental da estrutura,
através da equação (4.24), como representa a Figura 4.6.
Figura 4.6 – Deslocamento relativo entre as extremidades do dissipador.

26
∆𝑟𝑒𝑙,𝑖 = (𝜙𝐻
𝑖 − 𝜙𝐻𝑖−1)∆𝐻 + (𝜙𝑉
𝑖 − 𝜙𝑉𝑖−1)∆𝑉
√∆𝐻2 + ∆𝑉2 (4.24)
Em que:
𝜙𝐻𝑖 e 𝜙𝑉
𝑖 são, respetivamente, o deslocamento horizontal e vertical da configuração do deformada do
primeiro modo de vibração na extremidade i do dissipador;
∆𝐻 e ∆𝑉 correspondem, respetivamente, às projeções horizontais e verticais, do comprimento da
diagonal onde está colocado o dissipador.
Desta forma, contabilizam-se tanto os deslocamentos horizontais como os verticais em cada
extremidade do dissipador.
Uma vez que a energia dissipada é dada pela área expressa na equação (4.14), a energia dissipada
do oscilador equivalente (SDOF) pode ser dada pela equação (4.25):
𝐸𝑒𝑞 = 𝜋 𝐶𝑒𝑞 𝑝 ∆𝑒𝑞2 (4.25)
Do mesmo modo, a energia dissipada em cada piso da estrutura (MDOF) pode ser dada pela equação
(4.26):
𝐸𝑖 = 𝜋 𝐶𝑖 𝑝 ∆𝑟𝑒𝑙,𝑖2 (4.26)
Logo, a energia dissipada total 𝐸𝑇𝑂𝑇 na estrutura é igual ao somatório da energia dissipada em cada
dissipador, através da equação (4.27):
𝐸𝑇𝑂𝑇 =∑𝜋 𝐶𝑖 𝑝 ∆𝑟𝑒𝑙,𝑖2 (4.27)
Admitindo que os dissipadores são distribuídos uniformemente em altura, o coeficiente de
amortecimento 𝐶 será igual em todos os pisos, podendo a expressão anterior ser reescrita sob a forma
da equação (4.28):
𝐸𝑇𝑂𝑇 = 𝜋 𝐶 𝑝 ∑∆𝑟𝑒𝑙,𝑖2 (4.28)
Por fim, igualando a equação (4.25) à (4.28), o coeficiente de amortecimento do dissipador 𝐶𝑑𝑖𝑠𝑠 a
adotar em cada um é dado pela equação (4.29):
𝐶𝑑𝑖𝑠𝑠 =∆𝑒𝑞2
∑∆𝑟𝑒𝑙,𝑖2 𝐶𝑒𝑞 (4.29)
Em suma, a estrutura (MDOF) é transformada num oscilador equivalente de um grau de liberdade,
assumindo que a resposta sísmica da mesma é controlada unicamente pelo primeiro modo de vibração.
Definida a massa equivalente (𝑚𝑒𝑞), e o deslocamento máximo no topo do oscilador equivalente (𝛥𝑒𝑞),
assim como a determinação do coeficiente de amortecimento equivalente (𝐶𝑒𝑞), a metodologia proposta
27
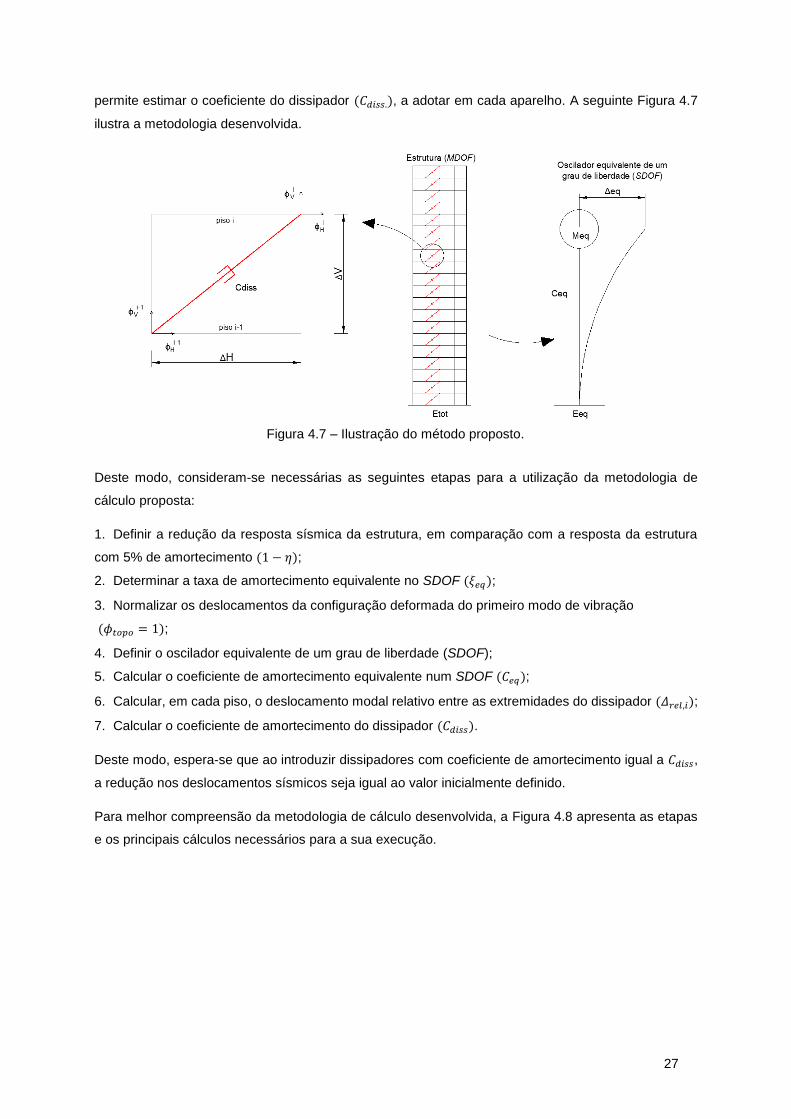
permite estimar o coeficiente do dissipador (𝐶𝑑𝑖𝑠𝑠.), a adotar em cada aparelho. A seguinte Figura 4.7
ilustra a metodologia desenvolvida.
Figura 4.7 – Ilustração do método proposto.
Deste modo, consideram-se necessárias as seguintes etapas para a utilização da metodologia de
cálculo proposta:
1. Definir a redução da resposta sísmica da estrutura, em comparação com a resposta da estrutura
com 5% de amortecimento (1 − 𝜂);
2. Determinar a taxa de amortecimento equivalente no SDOF (𝜉𝑒𝑞);
3. Normalizar os deslocamentos da configuração deformada do primeiro modo de vibração
(𝜙𝑡𝑜𝑝𝑜 = 1);
4. Definir o oscilador equivalente de um grau de liberdade (SDOF);
5. Calcular o coeficiente de amortecimento equivalente num SDOF (𝐶𝑒𝑞);
6. Calcular, em cada piso, o deslocamento modal relativo entre as extremidades do dissipador (𝛥𝑟𝑒𝑙,𝑖);
7. Calcular o coeficiente de amortecimento do dissipador (𝐶𝑑𝑖𝑠𝑠).
Deste modo, espera-se que ao introduzir dissipadores com coeficiente de amortecimento igual a 𝐶𝑑𝑖𝑠𝑠,
a redução nos deslocamentos sísmicos seja igual ao valor inicialmente definido.
Para melhor compreensão da metodologia de cálculo desenvolvida, a Figura 4.8 apresenta as etapas
e os principais cálculos necessários para a sua execução.

28
Figura 4.8 – Fluxograma da metodologia de cálculo proposta.
1) Definir a redução da resposta sísmica da estrutura, em comparação com a
resposta da estrutura com 5% de amortecimento:
1 − 𝜂 (%)
2) Determinar a taxa de amortecimento equivalente no SDOF, dada em percentagem:
𝜉𝑒𝑞 = 𝜉 − 𝜉𝑖 =
10
𝜂2− 5 − 𝜉𝑖
𝜉𝑖 = 2%
3) Normalizar os deslocamentos horizontais (ϕ𝑖) em cada piso,
associados à configuração deformada do 1º modo de vibração,
considerando 𝜙𝑡𝑜𝑝𝑜 = 1,0.
4) Definir o oscilador equivalente de um grau de liberdade (SDOF).
𝑚𝑒𝑞 = 𝑚∑𝜙𝑖
𝛤 =∑𝜙𝑖∑𝜙𝑖
2
𝛥𝑒𝑞 =𝜙𝑡𝑜𝑝𝑜
𝛤
5) Determinar o coeficiente de amortecimento
equivalente no SDOF:
𝐶𝑒𝑞 = 2 𝜉𝑒𝑞 𝑚𝑒𝑞 𝑝1
6) Calcular, em cada piso, o deslocamento modal relativo entre as extremidades do dissipador:
Δ𝑟𝑒𝑙,𝑖 =ϕ𝐻𝑖 − ϕ𝐻
𝑖−1 Δ𝐻 + ϕ𝑉𝑖 − ϕ𝑉
𝑖−1 Δ𝑉
Δ𝐻2 + Δ𝑉2
7. Calcular o coeficiente de amortecimento do dissipador, a adotar em cada piso:
𝐶𝑑𝑖𝑠𝑠 =𝛥𝑒𝑞2
∑𝛥𝑟𝑒𝑙,𝑖2 𝐶𝑒𝑞

29
5. Caso de estudo
O presente capítulo descreve os modelos numéricos que contemplam o caso de estudo. Recorreu-se
ao programa de cálculo automático de estruturas SAP2000 (CSI, 2011) para determinar as
características dinâmicas dos mesmos e avaliar o seu comportamento, antes e após a introdução dos
dissipadores viscosos.
O objetivo do presente estudo é estimar o amortecimento equivalente de uma distribuição uniforme de
dissipadores viscosos, em seis estruturas de betão armado distintas, através da metodologia de cálculo
proposta.
Em primeiro lugar, é necessário definir uma série de acelerações artificiais, representativa da ação
sísmica, uma vez que a única forma de analisar a resposta de uma estrutura com dissipadores é através
de uma análise dinâmica não linear no domínio do tempo (Time history – nonlinear – SAP2000). Para
tal considerou-se um sismo afastado (ação sísmica tipo 1) localizado em Lisboa, em solo do tipo B.
Apresenta-se ainda as principais características que definem e distinguem o comportamento de uma
estrutura tipo pórtico e o comportamento de uma estrutura tipo parede.
O caso de estudo envolve seis pórticos planos de betão armado, com comportamento misto pórtico-
parede, cuja predominância do efeito de parede aumenta gradualmente do primeiro ao último modelo.
Os modelos em estudo foram desenvolvidos previamente com o intuito de avaliar a distribuição ótima
de dissipadores viscosos em edifícios altos (Brás, 2015).
5.1. Caracterização da ação sísmica
Quando se pretende analisar a resposta sísmica de uma estrutura, a ação deve ser definida de modo
a ser aplicável às metodologias de análise estrutural existentes. Existem três formas possíveis de
caraterizar a ação sísmica, sendo que a forma mais direta para analisar o comportamento de uma
estrutura sujeita a essa ação é através de séries de acelerogramas.
Segundo Guerreiro (2016), uma vez que os dissipadores instalados na estrutura exibem um
comportamento não linear com a deformação, é inevitável o recurso a uma série de acelerações para
simular a ação sísmica.
No caso de estudo foi utilizado um conjunto de 10 acelerogramas artificiais do sismo tipo 1, em solo
tipo B e localizado em Lisboa. Considerou-se que a ação sísmica tipo 1 tem uma duração estacionária
de 30 segundos e as séries artificias foram geradas com a duração de 40 segundos, de forma a admitir
um período inicial e um período final de transição, e ainda uma duração de sinal estacionário compatível
com a imposição regulamentar (Guerreiro, 2010). A Figura 5.1 representa um dos acelerogramas
artificiais utilizados, apresentando-se as restantes séries de acelerogramas artificiais no Anexo A.

30
Figura 5.1 – Acelerograma artificial (Sismo 1).
5.2. Estrutura tipo pórtico puro vs. estrutura tipo parede
Nesta secção pretende-se avaliar a configuração deformada do primeiro modo de vibração de
estruturas com comportamento do tipo pórtico puro e do tipo parede.
Uma vez que a metodologia proposta considera apenas o modo fundamental, e ainda que a dissipação
de energia seja proporcional à deformação no dissipador, é relevante conhecer o que distingue a
deformada do primeiro modo de cada tipo de estrutura. Este distinção será importante para efetuar uma
análise coerente dos resultados.
Uma estrutura do tipo pórtico puro, sujeita a uma ação horizontal, exibe um comportamento próximo da
deformação por corte puro. A resistência sísmica de estruturas porticadas relaciona-se com a flexão
das vigas e dos pilares, sendo o efeito de diafragma das lajes dos pisos significativo na transmissão
das forças de inércia entre os elementos verticais (Net 9). O deslocamento relativo entre cada piso
depende da sua força de corte, e como esta diminui em altura o deslocamento entre pisos também
diminui, como mostra a Figura 5.2.
Figura 5.2 – Configuração deformada do primeiro modo de vibração de uma estrutura tipo pórtico [adaptado de (Lopes et al, 2008)].
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 1

31
Estruturas do tipo parede comportam-se como consolas encastradas na base, sendo que tanto os
deslocamentos entre pisos, como as rotações dos pisos, aumentam em altura, como se verifica na
seguinte Figura 5.3.
Figura 5.3 – Configuração deformada do primeiro modo de vibração de uma estrutura tipo parede [adaptado de (Lopes et al, 2008)].
No entanto, a grande maioria dos edifícios hoje em dia apresenta um comportamento misto, como é a
situação exposta nos casos de estudo. Através da interação entre os pilares e as paredes, os edifícios
passam a comportar-se como estruturas mistas pórtico-parede.
Tendo em consideração que no caso de pórtico puro os deslocamentos entre pisos diminuem em altura,
e que por outro lado, na parede estes aumentam, sabe-se que o máximo deslocamento relativo numa
estrutura mista ocorre numa posição intermédia do edifício.
Os dissipadores viscosos devem ser colocados nas zonas onde a estrutura apresenta maiores
deslocamentos relativos, visto que quanto maior a deformação maior será a energia dissipada. Um
edifício do tipo pórtico puro apresenta maiores deslocamentos na base, logo os dissipadores devem
ser instalados nos pisos inferiores do edifício.
No caso de uma estrutura com comportamento misto, cujos máximos valores de deslocamento ocorrem
numa posição intermédia entre o topo e a base, os dissipadores devem ser colocados numa posição
entre a base e o topo da estrutura. No entanto, é necessário considerar que numa estrutura com
predominância do comportamento de parede os dissipadores devem ser colocados tanto mais para o
topo do edifício quanto maior for o efeito de parede. Pelo contrário, devem ser aplicados tanto mais
para a base da estrutura quanto maior for a predominância do efeito de pórtico.
Na presente dissertação, uma vez que os dissipadores são distribuídos uniformemente em altura, e
como se pretende obter uma estimativa inicial do amortecimento equivalente em edifícios com uma
distribuição uniforme de dissipadores viscosos, não é necessário avaliar as melhores posições onde
estes devem ser instalados. No entanto, é importante conhecer que a distribuição ótima dos
dissipadores varia com o comportamento da estrutura.

32
5.3. Modelo numérico
A estrutura base consiste num pórtico de vinte pisos com cinco conjuntos de barra verticais, em que o
elemento central é do tipo parede e os restantes do tipo pilar, como mostra a Figura 5.4. As
características gerais da estrutura apresentam-se na Tabela 5.1.
Figura 5.4 – Modelo base das estruturas com comportamento misto pórtico-parede (dimensões em m).
Tabela 5.1 – Características gerais das estruturas com comportamento misto pórtico-parede (adaptado de Brás, 2015).
Número de pisos 20
Distância entre pisos 4 m
Afastamento entre pórticos 5 m
Espessura das lajes 0,20 m
Classe do Betão C40/50
A variação gradual da largura do elemento central, como se verifica na Tabela 5.2, assegura o aumento
progressivo do efeito de parede, do primeiro ao último modelo. Inicialmente o elemento apresenta a
mesma secção dos pilares, até que nos dois últimos modelos o elemento central ocupa todo o vão.
Ainda no último modelo é possível verificar que a espessura do elemento central é aumentada.

33
Tabela 5.2 – Características das estruturas mistas (adaptado de Brás, 2015).
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Ilustração
Dimensões Elemento
Central (m) 0,8 x 0,8 2,5 x 0,2 5,0 x 0,2 7,5 x 0,2 10,0 x 0,2 10,0 x 1,0
Para cada modelo assumiu-se que a massa é aplicada nos nós centrais, segundo a direção horizontal
do plano da estrutura, sendo o peso do material nulo (Brás, 2015).
O valor da massa contabiliza o peso próprio das lajes, pilares, paredes e vigas, e ainda nas lajes a
restante carga permanente no valor de 2,0 kN/m2, e ainda a parcela quase permanente da sobrecarga
(𝜓 = 0,3) no valor de 2,0 kN/m2, correspondente a um piso corrente de habitação NP EN1991-1 (CEN,
2010). A Tabela 5.3 apresenta a massa de cada piso para cada um dos modelos.
Tabela 5.3 – Massa aplicada em cada piso para cada modelo.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Massa (ton) 110,95 109,51 114,62 119,71 111,76 193,31
O programa SAP2000 (CSI, 2011) utiliza o modelo reológico de Maxwel (Hooke e Newton em série)
para modelar os dissipadores viscosos, através de um elemento do tipo Link. Este modelo corresponde
a um dissipador em série com uma mola de rigidez 𝐾 como ilustra a Figura 5.5.
Figura 5.5 – Modelo computacional do dissipador no programa SAP2000 (Brás, 2015).
A mola representa o alongamento da estrutura do dissipador (𝛥𝑘) pelo que a sua deformação deve ser
significativamente inferior à deformação no dissipador (𝛥𝑑) responsável pela dissipação de energia.

34
Deste modo, considera-se que a rigidez da mola (𝐾) tem um valor elevado, na ordem de grandeza 106
kN/m, de forma a respeitar a seguinte condição (5.1):
100 <Δd
Δk< 1000 (5.1)
Como indicado em 3.2.3 a força no dissipador é dada pela equação (3.1) que depende do parâmetro
𝛼. É de referir que o presente trabalho assume que os dissipadores apresentam um comportamento
linear com a velocidade, pelo que 𝛼 = 1.
35
6. Resultados e discussão
Neste capítulo são apresentados os resultados obtidos em cada um dos modelos que contemplam o
caso de estudo. Em primeiro lugar apresenta-se um exemplo de aplicação ao caso de estudo, onde se
descreve cada etapa da metodologia de cálculo. Por último discutem-se os resultados obtidos, e os
principais aspetos a ter em consideração na aplicação da metodologia de cálculo proposta.
6.1. Exemplo de aplicação
Nesta secção apresenta-se um exemplo de aplicação da metodologia proposta a cada um dos modelos
do caso de estudo, e descrevem-se as etapas necessárias à sua realização.
1) Definição da redução da resposta sísmica da estrutura
Considere-se como objetivo uma redução de 30% [(1 − 𝜂) = 0,3] da resposta sísmica da estrutura,
após a instalação dos dissipadores viscosos, face à situação sem dissipadores (estrutura com
amortecimento de 5%). Uma redução de 30% nos deslocamentos corresponde a um valor de 𝜂 igual a
0,70.
2) Determinação da taxa de amortecimento equivalente
Para 𝜂 = 0,70 calcula-se a taxa de amortecimento equivalente pela equação (4.18) que já inclui o
amortecimento inicial da estrutura (2%):
𝜂 = 0,70 = √10
5 + 𝜉 ⇔ 𝜉 = 15,4% ⇒ 𝜉𝑒𝑞 = 𝜉 − 2% = 13,4%
Seguidamente, determinam-se as características dinâmicas de cada modelo, nomeadamente o período
𝑇, a frequência fundamental da estrutura 𝑓 e a frequência própria angular não amortecida 𝑝,
apresentadas na seguinte Tabela 6.1.
Tabela 6.1 – Características dinâmicas associadas ao primeiro modo de vibração.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝑻𝟏 (𝒔) 2,262 1,786 1,417 1,231 1,101 1,010
𝒇𝟏 (𝑯𝒛) 0,442 0,560 0,706 0,812 0,908 0,909
𝒑𝟏(𝒓𝒂𝒅/𝒔) 2,777 3,517 4,434 5,102 5,706 5,713
3) Normalização dos deslocamentos da configuração deformada do primeiro modo de vibração
Considerando uma análise modal, determinam-se os deslocamentos modais horizontais (𝜙𝑖)
associados à configuração deformada do primeiro modo de vibração da estrutura, apresentados no
Anexo B. De seguida efetua-se a normalização dos deslocamentos modais horizontais, assumindo que
o deslocamento no topo é unitário (𝜙𝑡𝑜𝑝𝑜 = 1). Os deslocamentos modais horizontais normalizados
(𝜙𝑖,𝑛𝑜𝑟𝑚) apresentam-se no Anexo C.
36
4) Definição do oscilador equivalente de um grau de liberdade
A massa do oscilador equivalente de um grau de liberdade (𝑚𝑒𝑞) é obtida através da equação (4.20).
A Tabela 6.2 apresenta o valor da massa equivalente para cada modelo.
Tabela 6.2 – Massa (ton) do oscilador equivalente de um grau de liberdade.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝒎𝒆𝒒 (𝒕𝒐𝒏) 1270,4 1219,5 1149,4 1105,0 1003,0 1658,1
Com base nos deslocamentos modais horizontais normalizados obtidos anteriormente, determina-se o
deslocamento modal no topo do oscilador equivalente de um grau de liberdade ∆𝑒𝑞 através da equação
(4.22). A Tabela 6.3 apresenta o valor de ∆𝑒𝑞 para cada modelo das estruturas mistas pórtico-parede.
Tabela 6.3 – Deslocamento modal no topo do oscilador equivalente de um grau de liberdade (∆𝑒𝑞).
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
∆𝒆𝒒 0,741 0,732 0,702 0,682 0,676 0,667
5) Cálculo do coeficiente de amortecimento equivalente 𝑪𝒆𝒒
A equação (4.17) permite determinar o coeficiente de amortecimento equivalente (Tabela 6.4):
Tabela 6.4 – Coeficiente de amortecimento equivalente.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝑪𝒆𝒒 (𝒌𝑵𝒎−𝟏𝒔) 946 1150 1367 1512 1535 2540
6) Cálculo, em cada piso, do deslocamento modal relativo entre as extremidades do dissipador
∆𝒓𝒆𝒍,𝒊
Para cada modelo, calcula-se, em cadapiso, o deslocamento modal relativo entre as extremidades do
dissipador, através da equação (4.24). Determina-se ainda, para cada modelo, o valor de ∑∆𝑟𝑒𝑙2
apresentado na seguinte Tabela 6.5.
Tabela 6.5 – Somatório dos deslocamentos modais relativos entre as extremidades do dissipador ∑∆𝑟𝑒𝑙2 .
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
∑∆𝒓𝒆𝒍𝟐 0,0287 0,0177 0,0058 0,0013 0,0309 0,0306
Este valor corresponde ao somatório do deslocamento modal relativo entre as extremidades do
dissipador (∆𝑟𝑒𝑙,𝑖) em cada piso. Os deslocamentos modais verticais e horizontais necessários ao
cálculo desta parcela apresentam-se no Anexo D.

37
7) Cálculo do coeficiente de amortecimento do dissipador 𝑪𝒅𝒊𝒔𝒔
Por fim, através da expressão (4.29) determina-se o valor do coeficiente de amortecimento do
dissipador (𝐶𝑑𝑖𝑠𝑠) a adotar a cada um dos dissipadores distribuídos uniformemente pela altura de cada
estrutura (Tabela 6.6).
Tabela 6.6 – Coeficiente de amortecimento do dissipador (𝐶𝑑𝑖𝑠𝑠).
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝑪𝒅𝒊𝒔𝒔(𝒌𝑵𝒎−𝟏𝒔) 18106 34761 115165 541235 22709 36861
É de referir que os dissipadores foram colocados no segundo vão da estrutura, a contar da esquerda,
excetuando os modelos Mista 5 e Mista 6, em que foram instalados no primeiro vão. Esta opção deve-
se ao facto de nestes dois modelos o elemento central ocupar a totalidade do vão.
6.1. Resultados
Em primeiro lugar, determinam-se os deslocamentos horizontais máximos da estrutura sem
dissipadores. Estes resultam da média dos valores máximos dos deslocamentos obtidos para cada um
dos 10 acelerogramas apresentados no Anexo A. Seguidamente, efetua-se o mesmo para a estrutura
com dissipadores viscosos. Cada dissipador assume o coeficiente de amortecimento calculado através
da metodologia proposta, apresentado na Tabela 6.6.
A Figura 6.1 ilustra, para cada modelo das estruturas mistas pórtico-parede, a evolução do
deslocamento horizontal por pisos, ao longo da altura do edifício, antes e após a introdução dos
dissipadores viscosos. É possível constatar que o modelo Mista 1 (Figura 6.1 – (a)) exibe maiores
deslocamentos ao longo dos 20 pisos, e que pelo contrário, o modelo Mista 6 (Figura 6.1 – (f)) apresenta
deslocamentos inferiores. Contudo, o modelo Mista 6 exibe uma menor redução da resposta da
estrutura após a introdução dos dissipadores viscosos, assim como o modelo Mista 5 (Figura 6.1– (e)).
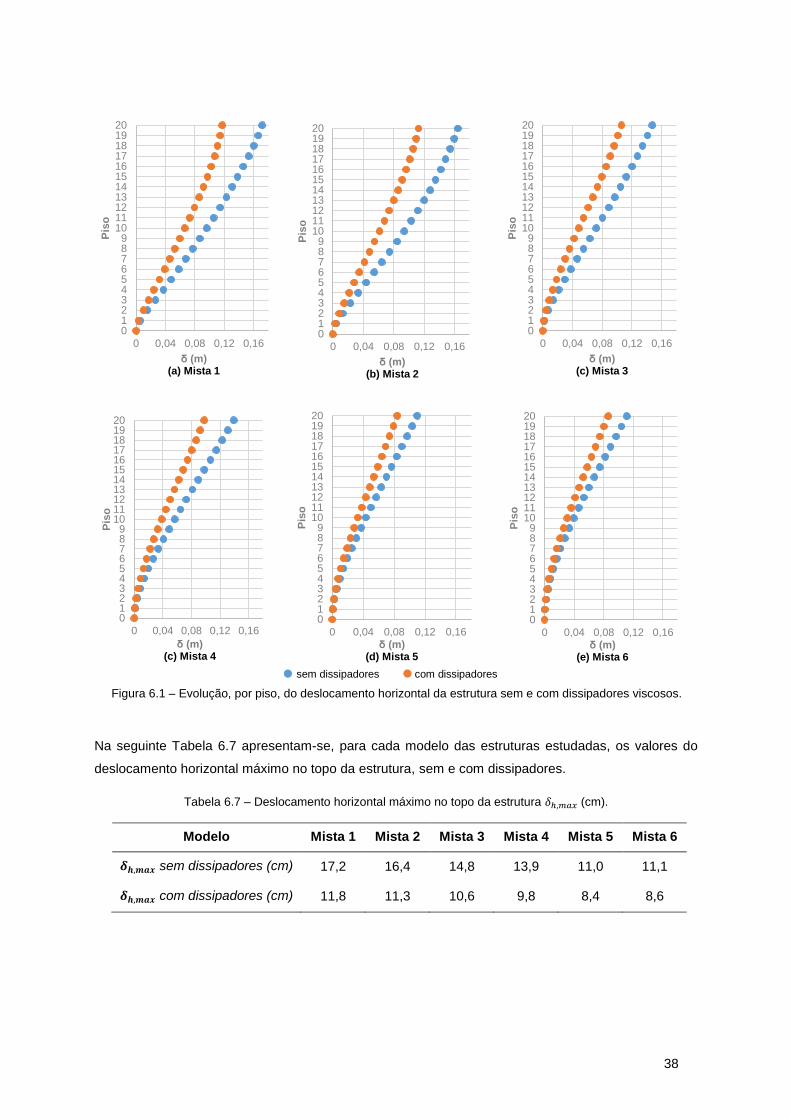
38
sem dissipadores com dissipadores
Figura 6.1 – Evolução, por piso, do deslocamento horizontal da estrutura sem e com dissipadores viscosos.
Na seguinte Tabela 6.7 apresentam-se, para cada modelo das estruturas estudadas, os valores do
deslocamento horizontal máximo no topo da estrutura, sem e com dissipadores.
Tabela 6.7 – Deslocamento horizontal máximo no topo da estrutura 𝛿ℎ,𝑚𝑎𝑥 (cm).
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝜹𝒉,𝒎𝒂𝒙 sem dissipadores (cm) 17,2 16,4 14,8 13,9 11,0 11,1
𝜹𝒉,𝒎𝒂𝒙 com dissipadores (cm) 11,8 11,3 10,6 9,8 8,4 8,6
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(a) Mista 1
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(b) Mista 2
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(c) Mista 3
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(c) Mista 4
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(d) Mista 5
0123456789
1011121314151617181920
0 0,04 0,08 0,12 0,16
Pis
o
δ (m)(e) Mista 6

39
6.2. Análise dos resultados
A metodologia desenvolvida e aplicada ao caso de estudo conduz aos resultados expressos na
seguinte Tabela 6.8.
Tabela 6.8 – Redução da resposta da estrutura com dissipadores viscosos
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Redução da resposta (%) 32 31 28 30 23 23
Os resultados apresentados na Tabela 6.8 referem-se à redução, em percentagem, do deslocamento
horizontal máximo no topo, de cada modelo, após ter sido atribuído a cada dissipador o coeficiente de
amortecimento do dissipador (𝐶𝑑𝑖𝑠𝑠), apresentado na Tabela 6.6.
A redução da resposta sísmica da estrutura, alcançada após a introdução dos dissipadores viscosos
na mesma, permite avaliar a metodologia proposta. A redução, em percentagem, é determinada pela
seguinte expressão (6.1):
𝑅𝑒𝑑𝑢çã𝑜 𝑑𝑎 𝑟𝑒𝑠𝑝𝑜𝑠𝑡𝑎 (%) =𝛿𝑆𝐷 − 𝛿𝐶𝐷
𝛿𝑆𝐷 (6.1)
Em que, 𝛿𝑆𝐷 e 𝛿𝐶𝐷 são, respetivamente, o deslocamento horizontal máximo no topo da estrutura sem e
com dissipadores.
Verifica-se pela análise dos resultados apresentados na Tabela 6.8 que, nos modelos Mista 1 a Mista
4, a metodologia de cálculo desenvolvida conduz a reduções da resposta sísmica bastante próximas
do objetivo inicial, ou seja, apresentam reduções na ordem dos 30%. O mesmo não se verifica nos
modelos Mista 5 e Mista 6.
Os modelos Mista 1, Mista 2 e Mista 4 apresentam reduções da resposta da estrutura superiores a 30%
pelo que nestes casos a metodologia oferece resultados conservativos, embora marginalmente.
Salienta-se o caso do modelo Mista 4, uma vez que atingiu exatamente a redução desejada no
deslocamento máximo no topo da estrutura.
Na Tabela 6.9 apresenta-se, para cada modelo, o erro relativo do resultado obtido face ao objetivo
predefinido.
Tabela 6.9 – Percentagem de erro relativo (em módulo) dos resultados obtidos.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Erro relativo (%) 6,7 3,3 6,7 0,00 23,3 23,3
A percentagem de erro relativo obtém-se pela expressão (6.2):
𝐸𝑟𝑟𝑜 𝑟𝑒𝑙𝑎𝑡𝑖𝑣𝑜 (%) =𝑅𝑒𝑑𝑜𝑏𝑗 − 𝑅𝑒𝑑𝑜𝑏𝑡
𝑅𝑒𝑑𝑜𝑏𝑗 (6.2)

40
em que, 𝑅𝑒𝑑𝑜𝑏𝑗 e 𝑅𝑒𝑑𝑜𝑏𝑡 são, respetivamente, a redução objetivo (que corresponde a uma redução de
30%) e a redução obtida após a instalação dos dissipadores viscosos na estrutura. Observa-se que os
modelos Mista 5 e Mista 6 apresentam um erro relativo elevado, na ordem dos 20%, enquanto os
restantes modelos exibem erros abaixo dos 6,7%.
A redução insuficiente da resposta sísmica da estrutura nos modelos Mista 5 e Mista 6 pode ser
justificada pelo facto de serem estruturas cujo comportamento do tipo parede tem maior influência,
devido às características geométricas conferidas aos mesmos. O elemento parede, em ambos os
casos, preenche os dois vãos centrais, e no modelo Mista 6 esse mesmo elemento apresenta ainda
uma maior espessura. Todos estes fatores contribuem para a predominância do efeito de parede sobre
o comportamento do tipo pórtico. Devido a esta configuração geométrica, nestes dois modelos os
dissipadores foram colocados no primeiro vão, como mostra a Figura 6.2.
Figura 6.2 – Posicionamento dos dissipadores viscosos nos modelos Mista 5 e Mista 6.
Os painéis de uma estrutura com comportamento do tipo parede, sujeita a uma ação horizontal,
apresentam movimento de corpo rígido, como ilustra a seguinte Figura 6.3, uma vez que tanto a rotação
dos pisos, como o deslocamento relativo entre pisos aumenta em altura, como referido na secção 5.2.
Figura 6.3 – Rotação de corpo rígido de um painel inserido numa estrutura com comportamento do tipo parede.
45º

41
Ao analisar a figura anterior, verifica-se que devido ao movimento de corpo rígido do painel onde se
encontra o dissipador, este quase não sofre deformação axial, mantendo um comprimento próximo do
inicial.
Sabe-se que a dissipação de energia é mais eficiente quando a deformação axial nos dissipadores
viscosos é máxima. Deste modo, o painel ao sofrer apenas movimento de rotação, acompanhando a
deformação do tipo consola da estrutura parede, não permite que o dissipador apresente alongamento
suficiente para assegurar a dissipação de energia necessária.
Por conseguinte, a instalação de dissipadores viscosos diagonais em estruturas cujo comportamento
do tipo parede é predominante não é aconselhável, uma vez que não contribui para uma redução
significativa da resposta da estrutura, como é possível observar na Tabela 6.8 e na Figura 6.1 – (e) e
(f).
De modo a obter melhores resultados em relação à redução da resposta deste tipo de estruturas, seria
necessário adotar um coeficiente de amortecimento muito elevado nos dissipadores viscosos, o que
não é de todo razoável devido ao aumento significativo do custo deste sistema de proteção sísmica.
Outra causa que pode estar na origem dos resultados obtidos, nos modelos Mista 5 e Mista 6, pode ser
o facto deste método de cálculo considerar apenas a contribuição do primeiro modo de vibração da
estrutura para a estimativa do coeficiente de amortecimento dos dissipadores. Isto porque nas
estruturas em que o comportamento do tipo parede tem maior influência os modos de vibração
superiores revelam maior importância. Assim sendo, a solução pode passar pela definição de uma
metodologia de cálculo que considere a contribuição dos modos de vibração superiores.
Relativamente aos modelos Mista 1 a Mista 4, observa-se pela Tabela 6.8 que apresentam reduções
do deslocamento horizontal máximo no topo da estrutura na ordem dos 30%, após a colocação dos
dissipadores, o que revela que a metodologia de cálculo proposta é adequada.
Os valores obtidos resultam do facto dos modelos referidos exibirem um comportamento semelhante
ao de pórtico puro, ou seja, corte puro, ilustrado na seguinte Figura 6.4, devido ao domínio do
comportamento do tipo pórtico sobre o de parede.
Figura 6.4 – Comportamento de pórtico (corte puro).

42
Como é possível observar na figura anterior, considerando o caso de uma estrutura do tipo pórtico puro,
o dissipador sofre alongamento e, consequentemente, apresenta deformação suficiente para garantir
a dissipação de energia necessária à redução da resposta sísmica da estrutura.
Para melhor compreender a influência do tipo de estrutura no desempenho dos dissipadores viscosos
avalia-se, seguidamente, o comportamento dos dissipadores viscosos nos modelos Mista 1 e Mista 5,
por serem casos extremos: o primeiro corresponde a um pórtico composto apenas por pilares e o
segundo possui um elemento central do tipo parede, de grande largura, que confere a predominância
do comportamento de parede.
6.2.1. Comportamento dos dissipadores viscosos
Nesta secção apresentam-se os gráficos força-deslocamento referentes aos dissipadores viscosos nos
modelos Mista 1 e Mista 5.
Salienta-se que os resultados apresentados na Tabela 6.8 provêm da média dos valores máximos dos
deslocamentos obtidos, para cada um dos acelerogramas indicados na secção 5.1. Uma vez que para
essa combinação não é possível obter os gráficos em questão, optou-se por considerar apenas os
resultados da série de acelerações 1 (Figura 5.1 presente na secção 5.1.).
Como referido, o modelo Mista 1 (CMista1=18106) caracteriza-se por apresentar maior influência do
comportamento do tipo pórtico puro e, assim sendo, é expectável que as maiores deformações se
verifiquem na base da estrutura. Por outro lado, no modelo Mista 6 (CMista5=22709) espera-se que as
maiores deformações ocorram no topo, uma vez que o efeito de parede é evidente.
A seguinte Figura 6.5 ilustra a deformação dos dissipadores viscosos em ambos os modelos (Mista 1
e Mista 5) através do ciclo representado no gráfico força-deslocamento, nos pisos 5, 15 e 20.
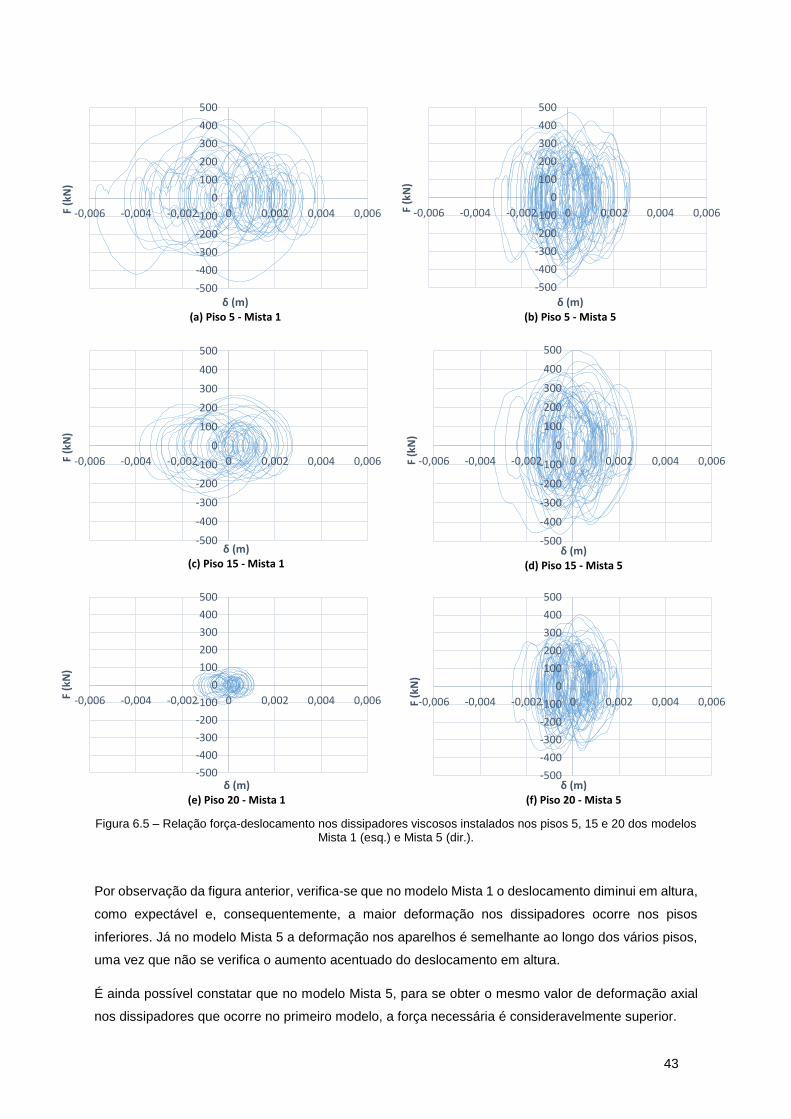
43
Figura 6.5 – Relação força-deslocamento nos dissipadores viscosos instalados nos pisos 5, 15 e 20 dos modelos Mista 1 (esq.) e Mista 5 (dir.).
Por observação da figura anterior, verifica-se que no modelo Mista 1 o deslocamento diminui em altura,
como expectável e, consequentemente, a maior deformação nos dissipadores ocorre nos pisos
inferiores. Já no modelo Mista 5 a deformação nos aparelhos é semelhante ao longo dos vários pisos,
uma vez que não se verifica o aumento acentuado do deslocamento em altura.
É ainda possível constatar que no modelo Mista 5, para se obter o mesmo valor de deformação axial
nos dissipadores que ocorre no primeiro modelo, a força necessária é consideravelmente superior.
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(a) Piso 5 - Mista 1
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(b) Piso 5 - Mista 5
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(c) Piso 15 - Mista 1
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(d) Piso 15 - Mista 5
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(e) Piso 20 - Mista 1
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0,006 -0,004 -0,002 0 0,002 0,004 0,006F (k
N)
δ (m)(f) Piso 20 - Mista 5
44
Considere-se os gráficos referentes ao piso 15 (Figura 6.5 – (c) e (d)), onde é bem visível que para
atingir um deslocamento total na ordem dos 0,004 m, no modelo Mista 5 é necessário uma força de
cerca de 500 kN, enquanto o modelo Mista 1 atinge uma deformação semelhante com uma força de
apenas 300 kN. Isto implica que para uma menor ação, o modelo Mista 1 tem maior deformação e, por
conseguinte, os dissipadores são capazes de dissipar maior energia. Pelo contrário, o modelo Mista 5,
para dissipar a mesma quantidade de energia, necessita de uma força atuante significativamente
superior.
Conclui-se, uma vez mais, que a aplicação de dissipadores viscosos diagonais não é recomendada em
estruturas semelhantes ao modelo Mista 5, isto é, estruturas cujo comportamento de parede é
predominante. Nestes casos, os dissipadores exigem uma força maior para atingir a deformação e,
consequentemente, a dissipação de energia necessária para reduzir a resposta sísmica da estrutura.
6.2.2. Influência da posição do dissipador
Como referido anteriormente, os dissipadores foram colocados no segundo vão em todos os modelos,
com exceção dos modelos Mista 5 e Mista 6, pelas razões geométricas enunciadas.
Numa fase inicial deste trabalho, optou-se por instalar os dissipadores no primeiro vão da estrutura, a
contar da esquerda. No entanto, essa hipótese revelou não ser a mais indicada, como é possível
concluir através dos resultados apresentados na Tabela 6.10, para os modelos Mista 1 e Mista 3.
Tabela 6.10 – Redução da resposta da estrutura com dissipadores viscosos instalados no primeiro vão.
Modelo Mista 1 Mista 3
Redução da resposta (%) 21 22
Considerando o método de cálculo proposto, a simples alteração da posição do dissipador do segundo
para o primeiro vão, e consequente modificação da inclinação do dissipador com a horizontal, provoca
alterações relevantes nos resultados. Com esta hipótese não se atinge a redução da resposta sísmica
da estrutura pretendida, em qualquer um dos casos apresentados.
Uma vez que a força nos elementos verticais, provocada pela ação sísmica, aumenta do centro para
fora da estrutura, os maiores deslocamentos verticais relativos entre pisos ocorrem, como expectável,
nos pilares de extremidade, como apresenta a seguinte Figura 6.6.
Figura 6.6 – Evolução da força vertical nos pilares.

45
A deformação vertical relativa dos pilares de extremidade é de tal modo significativa que anula a
deformação no dissipador, como ilustra a Figura 6.7. Deste modo, a deformação no dissipador é
reduzida, resultante da combinação dos dois modos de deformação, sendo insuficiente para absorver
energia.
Figura 6.7 – Deformação vertical do pilar de extremidade.
Conclui-se, deste modo, que a escolha do vão em que o dissipador é instalado apresenta grande
importância para a definição da estimativa do amortecimento equivalente a uma distribuição uniforme
de dissipadores viscosos. Deve-se garantir, sempre que possível, a instalação dos dispositivos o mais
próximo possível do eixo de simetria da estrutura, onde a deformação vertical dos pilares é mínima.
6.2.3. Taxa de amortecimento equivalente
Nesta secção avalia-se a resposta sísmica da estrutura quando se retiram todos os dissipadores e se
adota, em cada modelo, a taxa de amortecimento equivalente (ξeq=15,4%), determinada pela equação
(4.18). A taxa de amortecimento equivalente pretende conferir à estrutura o amortecimento provocado
pela instalação dos dissipadores viscosos na mesma. Pretende-se, deste modo, conhecer a redução
da resposta sísmica obtida quando a estrutura tem um amortecimento de 15,4%.
Para melhor compreensão, a Figura 6.8 apresenta o espetro de resposta associado ao modelo Mista
1, com amortecimento inicial (ξi=5%), e com amortecimento equivalente (ξeq=15,4%), calculado pela
expressão (4.18).

46
Figura 6.8 – Espetro de resposta no Modelos Mista 1, com amortecimento inicial de 5% e com amortecimento equivalente de 15,4%.
Como seria de esperar, o amortecimento equivalente oferece uma redução significativa na resposta
sísmica da estrutura. Neste caso todos os modos de vibração são amortecidos com 15,4%, o que faz
com que a diferença seja tanto maior quanto maior for a influência dos modos superiores, que
correspondem a períodos de vibração reduzidos. O espetro de resposta dos restantes modelos
encontra-se no Anexo E.
A seguinte Tabela 6.11 apresenta a redução obtida quando a estrutura toma o amortecimento
equivalente, face à situação sem dissipadores.
Tabela 6.11 – Resposta da estrutura com a taxa de amortecimento equivalente.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Redução da resposta (%) 38 40 40 44 39 51
Os valores obtidos referem-se à redução, em percentagem, do deslocamento horizontal máximo no
topo entre a estrutura com um amortecimento inicial de 5% (correspondente a uma estrutura corrente
em betão armado), e a mesma estrutura com a respetiva taxa de amortecimento equivalente (que
considera o amortecimento de 2% da estrutura com dissipadores, e ainda o incremento de
amortecimento provocado pela introdução dos dissipadores viscosos na estrutura).
A redução, em percentagem, é determinada pela seguinte expressão (6.3):
𝑅𝑒𝑑𝑢çã𝑜 𝑑𝑎 𝑟𝑒𝑠𝑝𝑜𝑠𝑡𝑎 (%) =𝛿𝑆𝐷 − 𝛿15,4%
𝛿𝑆𝐷 (6.3)
em que 𝛿15,4% corresponde ao deslocamento horizontal máximo no topo da estrutura com
amortecimento equivalente (ξeq=15,4%).
Como se observa, a redução da resposta sísmica obtida em qualquer um dos casos é superior aos
30% definidos inicialmente. No entanto, é compreensível que os valores obtidos não sejam os mesmos
quando se analisa a mesma estrutura com dissipadores viscosos distribuídos uniformemente em altura,
cujo coeficiente de amortecimento foi calculado a partir da taxa de amortecimento equivalente aqui
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2)
Período, T (s)
Mista 1
5% 15,4%

47
referida. A não consideração do dissipador no modelo justifica por si só os resultados conservativos.
Porém, é importante reconhecer que a taxa de amortecimento equivalente considerada conduz a uma
redução conservativa da resposta sísmica da estrutura. Por conseguinte, a taxa de amortecimento
equivalente revela-se um ponto de partida adequado à determinação da estimativa do coeficiente de
amortecimento do dissipador.
6.2.4. Método alternativo
No âmbito desta dissertação estudou-se a hipótese de desenvolver uma metodologia de cálculo que
contabilizasse apenas o deslocamento horizontal relativo entre pisos, tendo em consideração a
inclinação do dissipador com a horizontal.
Esta hipótese é em tudo semelhante à metodologia proposta. No entanto, a parcela que corresponde
ao deslocamento relativo, em cada piso, entre as extremidades do dissipador (∑∆𝑟𝑒𝑙,𝑖2 ) na equação
(4.29) é substituída pelo somatório do deslocamento relativo em cada piso (∑∆𝑖2). Assim sendo, não é
contabilizada a deformação vertical dos elementos verticais, considerando que a deformada do painel
onde o diagrama está instalado se dá por corte puro. É ainda necessário corrigir o valor do coeficiente
de amortecimento obtido, devido ao facto de o dissipador se encontrar inclinado em relação à
horizontal, como ilustra a seguinte Figura 6.9.
Figura 6.9 – Inclinação do dissipador com a horizontal.
Na Tabela 6.12 apresenta-se o coeficiente de amortecimento obtido através do método de cálculo
proposto e a mesma constante obtida através deste método alternativo.
Tabela 6.12 – Comparação do coeficiente de amortecimento do dissipador entre os dois métodos.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
C (Mét. Proposto) 18106 34761 115165 541235 22709 36861
C (Mét. Alternativo) 15866 19038 20939 21221 25421 39737
Como se pode comprovar, o método alternativo oferece um coeficiente de amortecimento
significativamente inferior em todos os modelos, com a exceção dos últimos dois casos, em que o valor
é muito semelhante. No entanto, os valores obtidos através do método alternativo não são suficientes
para atingir o objetivo estipulado, como se mostra na Tabela 6.13.

48
Tabela 6.13 – Redução da resposta da estrutura (ξ=2%) com dissipadores viscosos (método alternativo).
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
Redução da resposta (%) 28 14 -11 -40 26 25
Uma vez mais, a redução da resposta sísmica foi calculada através da expressão (6.1).
Deste modo, é possível verificar que o método alternativo não conduz a reduções da resposta sísmica
próximas do objetivo predefinido. O modelo Mista 1 é o que mais se aproxima da redução pretendida.
No entanto, os modelos Mista 3 e Mista 4 exibem um aumento do deslocamento horizontal máximo no
topo da estrutura, após a introdução dos dissipadores viscosos, sendo este acontecimento suficiente
para refutar a hipótese estudada.
Assim sendo, salienta-se a importância da consideração do deslocamento relativo entre as
extremidades do dissipador, na definição de um método de cálculo que vise estimar o coeficiente de
amortecimento dos dissipadores. Deve-se evitar a simplificação das abordagens de cálculo, e
contabilizar, sempre que exequível, os deslocamentos verticais e horizontais nas extremidades do
dissipador, dada a sua influência significativa na resposta da estrutura, como é bem percetível nos
resultados apresentados.
6.2.5. Validação do modelo
Por último, de forma a validar a metodologia proposta, estudaram-se outros valores para a redução
objetivo da resposta sísmica. Pretendem-se atingir uma redução de 20%, e de 40%, no deslocamento
horizontal máximo no topo da estrutura, após a instalação dos dissipadores viscosos. Para efeito
recorre-se ao modelo Mista 1, uma vez que é a estrutura com comportamento de pórtico.
A Tabela 6.14 apresenta os resultados obtidos no modelo Mista 1 para as três situações indicadas.
Tabela 6.14 – Resultados Modelo Mista 1.
Modelo Mista 1 (20%) Mista 1 (30%) Mista 1 (40%)
𝝃𝒆𝒒(%) 8,6 13,4 20,8
𝑪𝒆𝒒 (𝒌𝑵𝒎−𝟏𝒔) 609 946 1466
𝑪𝒅𝒊𝒔𝒔 (𝒌𝑵𝒎−𝟏𝒔) 11647 18106 28057
Redução da resposta (%) 20 32 43
Erro relativo (%) 0 6,7 7,5
Observa-se que o objetivo é atingido em qualquer um dos casos. Como expectável, para alcançar uma
maior redução da resposta sísmica da estrutura, neste caso a redução de 40%, o coeficiente de
amortecimento do dissipador tem de ser amplificado. Assim sendo, a metodologia proposta conduz a
boas aproximações no modelo Mista 1, apresentando erros da ordem dos 7% face aos objetivos
estipulados.
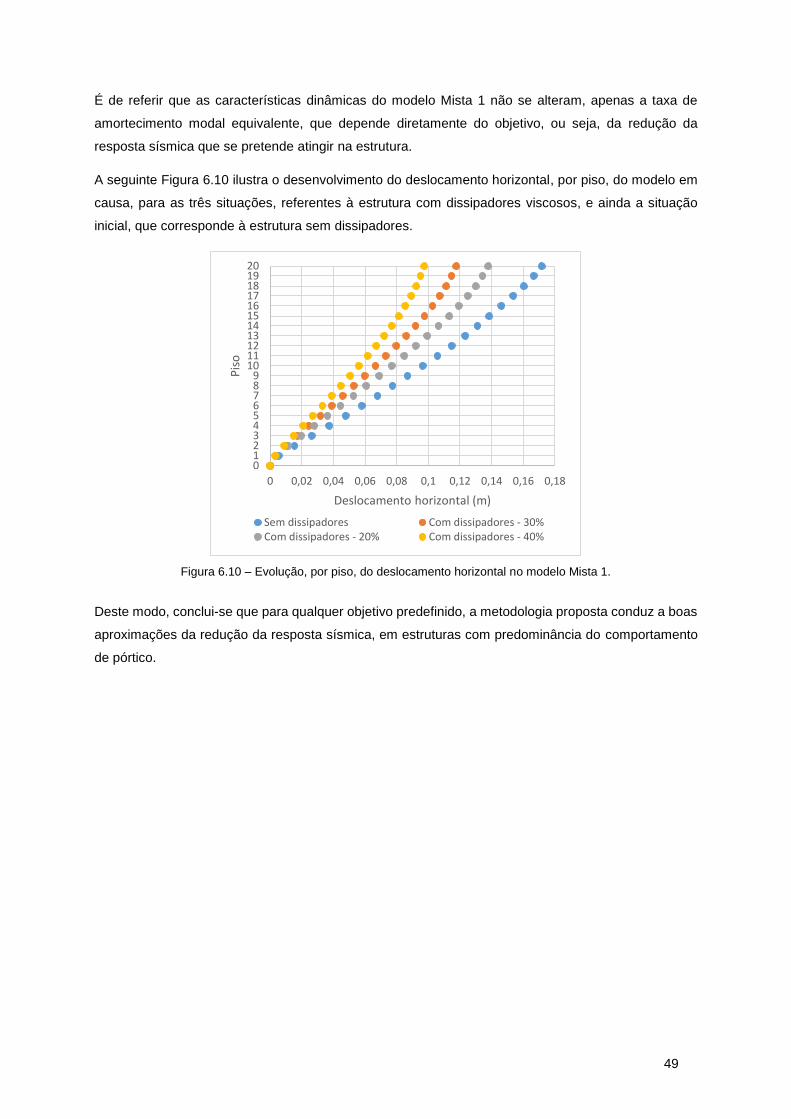
49
É de referir que as características dinâmicas do modelo Mista 1 não se alteram, apenas a taxa de
amortecimento modal equivalente, que depende diretamente do objetivo, ou seja, da redução da
resposta sísmica que se pretende atingir na estrutura.
A seguinte Figura 6.10 ilustra o desenvolvimento do deslocamento horizontal, por piso, do modelo em
causa, para as três situações, referentes à estrutura com dissipadores viscosos, e ainda a situação
inicial, que corresponde à estrutura sem dissipadores.
Figura 6.10 – Evolução, por piso, do deslocamento horizontal no modelo Mista 1.
Deste modo, conclui-se que para qualquer objetivo predefinido, a metodologia proposta conduz a boas
aproximações da redução da resposta sísmica, em estruturas com predominância do comportamento
de pórtico.
0123456789
1011121314151617181920
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18
Pis
o
Deslocamento horizontal (m)
Sem dissipadores Com dissipadores - 30%Com dissipadores - 20% Com dissipadores - 40%

50

51
7. Conclusões e desenvolvimentos futuros
As principais conclusões resultantes da aplicação da metodologia de cálculo ao caso de estudo são
enumeradas neste capítulo.
Apresentam-se ainda algumas considerações sobre possíveis desenvolvimentos futuros, com base no
recurso a dissipadores viscosos como sistema passivo de proteção sísmica em edifícios altos.
7.1. Conclusões
As consequências sociais e económicas provocadas por eventos sísmicos despoletou ao longo dos
anos o avanço tecnológico na área de engenharia sísmica. Os sistemas de proteção sísmica sofreram
grande evolução, no sentido de mitigar os efeitos de eventos sísmicos em edifícios.
No caso de edifícios altos, o recurso a dissipadores de energia, nomeadamente dissipadores viscosos,
é cada vez mais solicitado. O facto de serem equipamentos autossuficientes, de fácil instalação, e que
contribuem para uma redução dos danos caso a estrutura seja submetida a um fenómeno natural de
elevada magnitude, justificam a sua vasta aplicação.
No entanto, os métodos existentes para dimensionamento de sistemas passivos de proteção sísmica,
com recurso a dissipadores viscosos, definem iterativamente o coeficiente de amortecimento a atribuir
a cada dissipador, até um determinado objetivo ser alcançado, por exemplo uma redução predefinida
da resposta sísmica da estrutura.
Para além disso, através dos métodos de dimensionamento atuais não é possível definir o
amortecimento atingido pela estrutura após a aplicação dos dissipadores viscosos (Occhiuzzi, 2009).
A sua introdução na estrutura provoca um aumento significativo no amortecimento da mesma, não se
conhecendo, no entanto, o valor que é capaz de atingir.
O trabalho apresentado nesta dissertação pretende responder a este problema, tendo sido
desenvolvida uma metodologia de cálculo que permite calcular uma estimativa do amortecimento
equivalente a uma distribuição uniforme de dissipadores viscosos em edifícios altos.
Tendo como objetivo atingir uma determinada redução da resposta sísmica da estrutura, a abordagem
desenvolvida permite estimar, de forma simples e prática, o coeficiente de amortecimento que é
necessário considerar em cada dissipador.
Fundamentado no estado de conhecimento sobre esta temática (Occhiuzzi, 2009; Taylor, 2010), a
metodologia de cálculo proposta considera apenas a configuração deformada do modo fundamental da
estrutura, uma vez que é o modo responsável pelo comportamento global da mesma. Assim sendo, a
configuração deformada do primeiro modo de vibração permite a definição do oscilador equivalente de
um grau de liberdade.
A metodologia de cálculo proposta foi aplicada ao caso de estudo, que consiste em seis estruturas com
comportamento misto pórtico-parede, cuja influência do efeito de parede aumenta progressivamente,
do primeiro ao último modelo (Brás, 2015). Por conseguinte, os primeiros modelos contemplam

52
estruturas com predominância do comportamento tipo pórtico, enquanto os últimos apresentam
predominância do comportamento tipo parede.
Chegou-se à conclusão de que o tipo e o comportamento da estrutura são os principais fatores que
influenciam a metodologia proposta. Desta forma, foi possível definir o campo de aplicação da mesma.
A abordagem de cálculo revelou-se adequada a estruturas com predominância do comportamento de
pórtico. A redução da resposta sísmica, obtida após a aplicação dos dissipadores viscosos, com o
respetivo coeficiente de amortecimento calculado, acabou por se revelar bastante próxima do objetivo
inicial. Por outro lado, a redução objetivo da resposta sísmica, em estruturas com maior influência do
comportamento de parede, não foi conseguida.
Sendo a configuração deformada do primeiro modo de vibração de uma estrutura do tipo parede
semelhante à de uma consola, o deslocamento entre pisos resulta essencialmente da rotação dos
mesmos. Deste modo, o painel onde se encontra o dissipador acaba por sofrer praticamente só
movimento de corpo rígido e, por conseguinte, o dissipador não sofre deformação axial suficiente para
garantir a dissipação de energia necessária. Por esta razão, a utilização de dissipadores viscosos
diagonais, em estruturas com predominância do comportamento de parede, revelou não ser a mais
adequada.
Os modos de vibração superiores apresentam maior influência nas estruturas com predominância do
comportamento de parede. Por essa razão, o facto da metodologia de cálculo considerar apenas o
modo fundamental da estrutura poderá ter influenciado os resultados obtidos.
Como referido, estruturas com predominância do comportamento de pórtico atingiram o objetivo
predefinido. O facto de exibirem um comportamento semelhante ao de corte puro, faz com que o
dissipador apresente deformação axial suficiente para atingir a dissipação de energia solicitada. Desta
forma, a redução da resposta sísmica da estrutura é assegurada.
Ao avaliar o ciclo força-deslocamento dos dissipadores viscosos, conclui-se que, numa estrutura com
predominância do comportamento de parede, é necessária uma força atuante superior, para que o
dissipador exiba uma deformação semelhante à que é atingida numa estrutura com predominância do
comportamento de pórtico. É assimreforçada a conclusão de que não é viável a aplicação de
dissipadores viscosos diagonais em estruturas influenciadas pelo comportamento de parede.
Em suma, a metodologia proposta conduz a boas aproximações em estruturas dominadas pelo
comportamento do tipo pórtico.
A metodologia de cálculo revela ainda que, para estimar corretamente o coeficiente de amortecimento
do dissipador, é importante considerar o deslocamento relativo entre as extremidades do mesmo, para
que os deslocamentos verticais e horizontais em cada extremidade sejam contabilizados. Salienta-se,
também, que a posição dos dissipadores influencia significativamente os resultados obtidos. Sempre
que exequível, devem ser instalados o mais próximo possível do eixo de simetria da estrutura.

53
Por último, é de referir que a simplificação de métodos de dimensionamento de sistemas com
dissipadores viscosos deve ser evitada. Por exemplo, considerar apenas o deslocamento horizontal
relativo entre pisos, influencia, negativamente, a redução da resposta sísmica da estrutura.
7.2. Desenvolvimentos futuros
Partindo dos estudos desenvolvidos ao longo deste trabalho, e procurando atingir melhores resultados
na avaliação da resposta sísmica de edifícios altos com dissipadores viscosos, sugerem-se alguns
aspetos a considerar em estudos futuros.
Primeiramente, é de salientar que a regulamentação portuguesa atual não apresenta qualquer método
de dimensionamento sobre sistemas de dissipação de energia em edifícios. O investimento inicial
significativo exigido por estes sistemas, assim como a não existência de qualquer edifício com
dissipadores viscosos em Portugal, até à data, pode estar na origem deste problema. Nesse sentido,
propõe-se a introdução de métodos que permitam avaliar a influência de técnicas de proteção sísmica
em estruturas. Uma vez que o país apresenta um risco sísmico considerável (Net 5), é fundamental
que a adoção de dissipadores viscosos em edifícios seja fomentada e facilitada, através da introdução
de métodos sobre estes sistemas de dissipação de energia nos regulamentos. Deste modo, Portugal
pode acompanhar a evolução da engenharia sísmica, ao tornar esta solução presente tanto no reforço
sísmico de estruturas existentes, como em novas construções.
De modo a obter melhores resultados em estruturas com predominância do comportamento de parede,
a definição de uma metodologia de cálculo, adequada a estes casos, torna-se pertinente. A solução
pode passar por uma diferente disposição dos aparelhos no edifício, uma vez que a adoção de
dissipadores diagonais não permite atingir a máxima dissipação de energia possível. Sugere-se, ainda,
a consideração dos modos de vibração superiores, uma vez que apresentam maior influência em
estruturas deste tipo.
Outro aspeto relevante é o comportamento linear atribuído aos dissipadores viscosos, ao tomar o
parâmetro 𝛼 unitário. No entanto, sabe-se que o comportamento dos dissipadores viscosos rege-se por
uma equação não linear. Revela-se, por isso, importante conhecer a influência dos dissipadores do tipo
não linear na metodologia proposta.
A metodologia de cálculo é aplicada ao caso de estudo, que consiste em seis pórticos planos. Sugere-
se a aplicação da abordagem em estruturas tridimensionais, de forma a determinar outros aspetos a
ter em consideração na estimativa do amortecimento equivalente a uma distribuição uniforme de
dissipadores viscosos em edifícios altos.
Propõe-se ainda a utilização desta abordagem na definição de uma solução global com sistemas de
dissipação de energia viscosos, nomeadamente, no desenvolvimento de procedimentos que permitam
determinar a localização ótima dos dissipadores viscosos.

54

55
Referências Bibliográficas
Appleton, J., OOM, M., Costa, A., & Delgado, J. Seismic Retrofitting of Three Bridges. Aproach
Viaduct of Figueira da Foz Bridge (2003).
Azevedo, J., & Proença, J. Dinâmica de Estruturas, Apontamentos da disciplina de Dinâmica
Estrutural e Engenharia Sísmica do Mestrado em Engenharia de Estruturas do IST (1991).
Bento, R., & Lopes, M. (2005). A Construção Pombalina.
Branco, M. (2006). Utilização de Dissipadores Viscosos para Reforço Sísmico de Edifícios de
Alvenaria. Revista Engenharia E Vida, Ano II, no29, Novembro, 1–5.
Brás, I. (2015). Otimização da Distribuição de Sistemas de Dissipação de Energia em Edifícios
Altos. Instituto Superior Técnico da Universidade de Lisboa.
CEN. (2010). Eurocódigo 8 - Projecto de Estruturas para Resistência aos Sismos. Parte 1:
Regras gerais, acções sísmicas e regras para edifícios. Norma Portuguesa.
Chopra, A. (1995). Dynamics of Structures: Theory and Applications to Earthquake Engineering.
CSI. (2011). Analysis Reference Manual For SAP2000®, ETABS®, SAFE® and CSiBridgeTM,
Computers and Structures, Inc.
Ferreira, J. Hospital da Luz (2006).
Guerreiro, L. Sistemas de Dissipação de Energia, Apontamentos da disciplina de Dinâmica e
Engenharia Sísmica do Mestrado em Engenharia de Estruturas do IST (2006).
Guerreiro, L. Geração de um Conjunto de Sismos Artificiais Compatíveis com Espectros de
Resposta Definidos no Anexo Nacional do Eurocódigo 8, Relatório ICIST (2010).
Guerreiro, L. Danos em Pontes devido à acção sísmica, Apontamentos da disciplina de
Engenharia Sísmica Engenharia Sísmica de Pontes do Mestrado em Engenharia de
Estruturas (2011).
Guerreiro, L. Estratégias para melhoria do comportamento sísmico de edifícios - Seminário
Ordem dos Engenheiros, www.ordemengenheiros.pt (2011).
Guerreiro, L. Acção sísmica, Apontamentos da disciplina de Engenharia Sísmica de Pontes do
Mestrado em Engenharia de Estruturas do IST (2016).
Krawinkler, H. (1998). Pros and cons of a pushover analysis of seismic performance evaluation,
296(97), 452–464.
Lopes, M. (2008). Sismos e Edifícios, 1a edição, Edições Orion, Amadora, 972-978-8620.

56
Occhiuzzi, A. (2009). Additional viscous dampers for civil structures : Analysis of design methods
based on effective evaluation of modal damping ratios. Engineering Structures, 31(5), 1093–
1101.
Sousa, M. L. (2008). Annualized Economic And Human Earthquake Losses For Mainland
Portugal. In The 14th World Conference on Earthquake Engineering, Beijing, China.
Taylor, D. P. Fluid Dampers For Applications Of Seismic Energy Dissipation And Seismic Isolation
(2010).
Net 1, http://taylordevices.com/pdf/Yearly-updates/YearlyUpdatedStructuralApplicationChart.pdf,
consultado em janeiro 2017
Net 2, http://earthquake.usgs.gov/earthquakes/eventpage/us10006g7d#executive, consultado
em setembro 2016
Net 3, http://observador.pt/2016/09/03/desalojados-do-sismo-em-italia-vao-esperar-sete-meses-
por-casas-prefabricadas/, consultado em setembro 2016
Net 4, http://earthquake.usgs.gov/earthquakes/eventpage/usp000h60h#executive, consultado
em setembro 2016
Net 5, http://www-ext.lnec.pt/LNEC/DE/NESDE/divulgacao/tectonica.html, consultado em
setembro 2016
Net 6, http://www-ext.lnec.pt/LNEC/DE/NESDE/divulgacao/risco_sismico.html, consultado em
setembro 2016
Net 7, http://www-ext.lnec.pt/LNEC/DE/NESDE/divulgacao/vulnerabilidade.html, consultado em
setembro 2016
Net 8, http://taylordevices.in/pacific-bell-north-area-operation-center-2/, consultado em janeiro
2017
Net 9, http://www-ext.lnec.pt/LNEC/DE/NESDE/divulgacao/vulnerabilidade.html consultado em
janeiro 2017

57
Anexos

58

59
Anexo A – Série de Acelerogramas Artificiais
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2)
Tempo (s)
Sismo 2
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 3

60
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 4
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 5

61
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 6
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 7

62
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 8
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 9

63
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
0 5 10 15 20 25 30 35 40
Ace
lera
ção
(m
/s2 )
Tempo (s)
Sismo 10

64

65
Anexo B – Deslocamentos modais horizontais
Tabela B.1 – Deslocamentos modais horizontais (ϕi) para cada um dos modelos das estruturas mistas pórtico-parede.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝝓𝟎 0,000 0,000 0,000 0,000 0,000 0,000
𝝓𝟏 0,001 0,001 0,000 0,000 0,000 0,000
𝝓𝟐 0,003 0,002 0,002 0,001 0,001 0,001
𝝓𝟑 0,005 0,004 0,003 0,002 0,002 0,001
𝝓𝟒 0,007 0,006 0,005 0,003 0,003 0,002
𝝓𝟓 0,009 0,008 0,006 0,005 0,005 0,003
𝝓𝟔 0,011 0,010 0,008 0,007 0,007 0,004
𝝓𝟕 0,013 0,013 0,010 0,009 0,009 0,006
𝝓𝟖 0,015 0,015 0,012 0,011 0,011 0,007
𝝓𝟗 0,017 0,017 0,015 0,013 0,013 0,009
𝝓𝟏𝟎 0,019 0,019 0,017 0,015 0,015 0,011
𝝓𝟏𝟏 0,021 0,021 0,019 0,017 0,017 0,013
𝝓𝟏𝟐 0,023 0,023 0,021 0,019 0,020 0,014
𝝓𝟏𝟑 0,024 0,024 0,023 0,022 0,022 0,016
𝝓𝟏𝟒 0,026 0,026 0,025 0,024 0,025 0,018
𝝓𝟏𝟓 0,027 0,028 0,027 0,026 0,027 0,020
𝝓𝟏𝟔 0,029 0,029 0,029 0,028 0,029 0,022
𝝓𝟏𝟕 0,030 0,030 0,030 0,030 0,032 0,024
𝝓𝟏𝟖 0,031 0,032 0,032 0,032 0,034 0,026
𝝓𝟏𝟗 0,032 0,033 0,034 0,034 0,036 0,028
𝝓𝟐𝟎 0,033 0,033 0,035 0,036 0,038 0,030

66

67
Anexo C – Deslocamentos modais horizontais normalizados
Tabela C.1 - Deslocamentos modais horizontais normalizados (ϕi,norm) para cada um dos modelos das estruturas mistas pórtico-parede.
Modelo Mista 1 Mista 2 Mista 3 Mista 4 Mista 5 Mista 6
𝝓𝟎,𝒏𝒐𝒓𝒎 0,000 0,000 0,000 0,000 0,000 0,000
𝝓𝟏,𝒏𝒐𝒓𝒎 0,028 0,023 0,013 0,008 0,006 0,005
𝝓𝟐,𝒏𝒐𝒓𝒎 0,080 0,071 0,043 0,029 0,024 0,019
𝝓𝟑,𝒏𝒐𝒓𝒎 0,140 0,127 0,083 0,059 0,051 0,041
𝝓𝟒,𝒏𝒐𝒓𝒎 0,203 0,187 0,130 0,096 0,085 0,071
𝝓𝟓,𝒏𝒐𝒓𝒎 0,267 0,249 0,182 0,139 0,126 0,107
𝝓𝟔,𝒏𝒐𝒓𝒎 0,331 0,311 0,237 0,187 0,171 0,149
𝝓𝟕,𝒏𝒐𝒓𝒎 0,396 0,374 0,295 0,239 0,222 0,196
𝝓𝟖,𝒏𝒐𝒓𝒎 0,459 0,436 0,354 0,295 0,276 0,247
𝝓𝟗,𝒏𝒐𝒓𝒎 0,521 0,498 0,414 0,352 0,332 0,302
𝝓𝟏𝟎,𝒏𝒐𝒓𝒎 0,581 0,558 0,474 0,412 0,392 0,359
𝝓𝟏𝟏,𝒏𝒐𝒓𝒎 0,639 0,616 0,534 0,472 0,452 0,420
𝝓𝟏𝟐,𝒏𝒐𝒓𝒎 0,694 0,672 0,594 0,533 0,514 0,482
𝝓𝟏𝟑,𝒏𝒐𝒓𝒎 0,746 0,726 0,652 0,595 0,576 0,545
𝝓𝟏𝟒,𝒏𝒐𝒓𝒎 0,795 0,776 0,709 0,656 0,638 0,609
𝝓𝟏𝟓,𝒏𝒐𝒓𝒎 0,840 0,823 0,763 0,716 0,701 0,674
𝝓𝟏𝟔,𝒏𝒐𝒓𝒎 0,881 0,867 0,816 0,775 0,762 0,740
𝝓𝟏𝟕,𝒏𝒐𝒓𝒎 0,917 0,906 0,865 0,833 0,823 0,805
𝝓𝟏𝟖,𝒏𝒐𝒓𝒎 0,949 0,942 0,913 0,890 0,883 0,870
𝝓𝟏𝟗,𝒏𝒐𝒓𝒎 0,977 0,973 0,957 0,945 0,942 0,935
𝝓𝟐𝟎,𝒏𝒐𝒓𝒎 1,000 1,000 1,000 1,000 1,000 1,000

68

69
Anexo D – Deslocamento relativo entre as extremidades do
dissipador
Tabela D.1 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 1.
Mista 1
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 -0,0009 -0,0009 0,0000 0,0000 0,0278 0,0278 0,0002 0,0000 0,0217 0,0005
Piso2 -0,0026 -0,0026 0,0000 0,0000 0,0803 0,0803 0,0005 0,0000 0,0408 0,0017
Piso3 -0,0046 -0,0046 0,0000 0,0000 0,1403 0,1403 0,0010 0,0000 0,0465 0,0022
Piso4 -0,0066 -0,0066 0,0000 0,0000 0,2031 0,2031 0,0015 0,0000 0,0485 0,0023
Piso5 -0,0087 -0,0087 -0,0001 0,0000 0,2671 0,2671 0,0021 0,0000 0,0490 0,0024
Piso6 -0,0108 -0,0108 -0,0001 0,0000 0,3315 0,3315 0,0027 0,0000 0,0490 0,0024
Piso7 -0,0129 -0,0129 -0,0001 0,0000 0,3956 0,3956 0,0034 0,0000 0,0484 0,0023
Piso8 -0,0150 -0,0150 -0,0001 0,0000 0,4588 0,4588 0,0041 0,0000 0,0473 0,0022
Piso9 -0,0170 -0,0170 -0,0002 0,0000 0,5209 0,5209 0,0048 0,0000 0,0459 0,0021
Piso10 -0,0189 -0,0189 -0,0002 0,0000 0,5810 0,5810 0,0055 0,0000 0,0440 0,0019
Piso11 -0,0208 -0,0208 -0,0002 0,0000 0,6390 0,6390 0,0061 0,0000 0,0419 0,0018
Piso12 -0,0226 -0,0226 -0,0002 0,0000 0,6942 0,6942 0,0068 0,0000 0,0393 0,0015
Piso13 -0,0243 -0,0243 -0,0002 0,0000 0,7464 0,7464 0,0074 0,0000 0,0365 0,0013
Piso14 -0,0259 -0,0259 -0,0003 0,0000 0,7951 0,7951 0,0080 0,0000 0,0334 0,0011
Piso15 -0,0274 -0,0274 -0,0003 0,0000 0,8400 0,8400 0,0085 0,0000 0,0301 0,0009
Piso16 -0,0287 -0,0287 -0,0003 0,0000 0,8808 0,8808 0,0089 0,0000 0,0266 0,0007
Piso17 -0,0299 -0,0299 -0,0003 0,0000 0,9173 0,9173 0,0093 0,0000 0,0229 0,0005
Piso18 -0,0309 -0,0309 -0,0003 0,0000 0,9493 0,9493 0,0096 0,0000 0,0192 0,0004
Piso19 -0,0318 -0,0318 -0,0003 0,0000 0,9767 0,9767 0,0098 0,0000 0,0154 0,0002
Piso20 -0,0326 -0,0326 -0,0003 0,0000 1,0000 1,0000 0,0099 0,0000 0,0121 0,0001
∑∆𝑟𝑒𝑙2 0,0287

70
Tabela D.2 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 2.
Mista 2
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 0,0008 0,0008 0,0001 0,0000 0,0235 0,0235 0,0032 0,0000 0,0183 0,0003
Piso2 0,0024 0,0024 0,0002 0,0000 0,0709 0,0709 0,0063 0,0000 0,0350 0,0012
Piso3 0,0043 0,0043 0,0003 0,0000 0,1271 0,1271 0,0091 0,0000 0,0400 0,0016
Piso4 0,0063 0,0063 0,0004 0,0000 0,1871 0,1871 0,0117 0,0000 0,0411 0,0017
Piso5 0,0083 0,0083 0,0005 0,0000 0,2489 0,2489 0,0141 0,0000 0,0409 0,0017
Piso6 0,0104 0,0104 0,0005 0,0000 0,3114 0,3114 0,0162 0,0000 0,0400 0,0016
Piso7 0,0125 0,0125 0,0006 0,0000 0,3742 0,3742 0,0181 0,0000 0,0389 0,0015
Piso8 0,0146 0,0146 0,0007 0,0000 0,4365 0,4365 0,0197 0,0000 0,0374 0,0014
Piso9 0,0167 0,0167 0,0007 0,0000 0,4979 0,4979 0,0212 0,0000 0,0357 0,0013
Piso10 0,0187 0,0187 0,0008 0,0000 0,5580 0,5580 0,0224 0,0000 0,0337 0,0011
Piso11 0,0206 0,0206 0,0008 0,0000 0,6163 0,6164 0,0234 0,0000 0,0316 0,0010
Piso12 0,0225 0,0225 0,0008 0,0000 0,6725 0,6725 0,0243 0,0000 0,0292 0,0009
Piso13 0,0243 0,0243 0,0008 0,0000 0,7259 0,7259 0,0250 0,0000 0,0266 0,0007
Piso14 0,0260 0,0260 0,0009 0,0000 0,7764 0,7764 0,0255 0,0000 0,0238 0,0006
Piso15 0,0276 0,0276 0,0009 0,0000 0,8234 0,8234 0,0259 0,0000 0,0208 0,0004
Piso16 0,0290 0,0290 0,0009 0,0000 0,8668 0,8668 0,0262 0,0000 0,0177 0,0003
Piso17 0,0303 0,0303 0,0009 0,0000 0,9063 0,9063 0,0264 0,0000 0,0144 0,0002
Piso18 0,0315 0,0315 0,0009 0,0000 0,9415 0,9415 0,0265 0,0000 0,0111 0,0001
Piso19 0,0326 0,0326 0,0009 0,0000 0,9726 0,9726 0,0266 0,0000 0,0077 0,0001
Piso20 0,0335 0,0335 0,0009 0,0000 1,0000 1,0000 0,0266 0,0000 0,0048 0,0000
∑∆𝑟𝑒𝑙2 0,0177
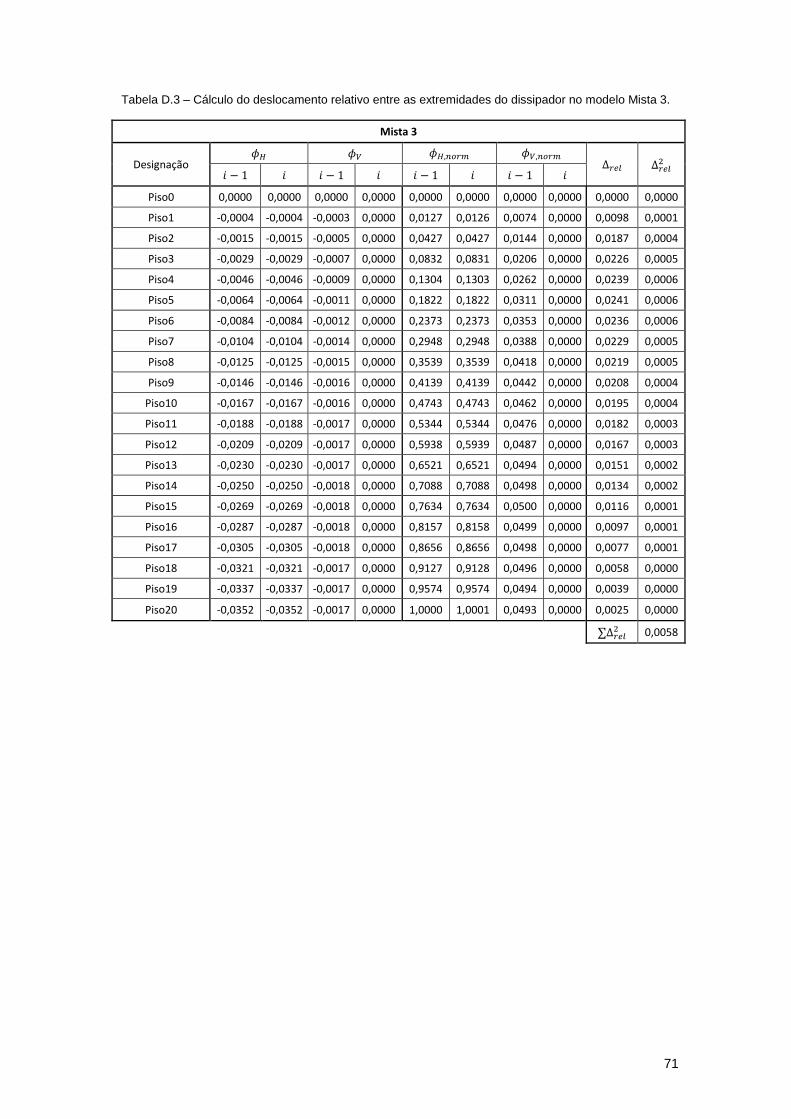
71
Tabela D.3 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 3.
Mista 3
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 -0,0004 -0,0004 -0,0003 0,0000 0,0127 0,0126 0,0074 0,0000 0,0098 0,0001
Piso2 -0,0015 -0,0015 -0,0005 0,0000 0,0427 0,0427 0,0144 0,0000 0,0187 0,0004
Piso3 -0,0029 -0,0029 -0,0007 0,0000 0,0832 0,0831 0,0206 0,0000 0,0226 0,0005
Piso4 -0,0046 -0,0046 -0,0009 0,0000 0,1304 0,1303 0,0262 0,0000 0,0239 0,0006
Piso5 -0,0064 -0,0064 -0,0011 0,0000 0,1822 0,1822 0,0311 0,0000 0,0241 0,0006
Piso6 -0,0084 -0,0084 -0,0012 0,0000 0,2373 0,2373 0,0353 0,0000 0,0236 0,0006
Piso7 -0,0104 -0,0104 -0,0014 0,0000 0,2948 0,2948 0,0388 0,0000 0,0229 0,0005
Piso8 -0,0125 -0,0125 -0,0015 0,0000 0,3539 0,3539 0,0418 0,0000 0,0219 0,0005
Piso9 -0,0146 -0,0146 -0,0016 0,0000 0,4139 0,4139 0,0442 0,0000 0,0208 0,0004
Piso10 -0,0167 -0,0167 -0,0016 0,0000 0,4743 0,4743 0,0462 0,0000 0,0195 0,0004
Piso11 -0,0188 -0,0188 -0,0017 0,0000 0,5344 0,5344 0,0476 0,0000 0,0182 0,0003
Piso12 -0,0209 -0,0209 -0,0017 0,0000 0,5938 0,5939 0,0487 0,0000 0,0167 0,0003
Piso13 -0,0230 -0,0230 -0,0017 0,0000 0,6521 0,6521 0,0494 0,0000 0,0151 0,0002
Piso14 -0,0250 -0,0250 -0,0018 0,0000 0,7088 0,7088 0,0498 0,0000 0,0134 0,0002
Piso15 -0,0269 -0,0269 -0,0018 0,0000 0,7634 0,7634 0,0500 0,0000 0,0116 0,0001
Piso16 -0,0287 -0,0287 -0,0018 0,0000 0,8157 0,8158 0,0499 0,0000 0,0097 0,0001
Piso17 -0,0305 -0,0305 -0,0018 0,0000 0,8656 0,8656 0,0498 0,0000 0,0077 0,0001
Piso18 -0,0321 -0,0321 -0,0017 0,0000 0,9127 0,9128 0,0496 0,0000 0,0058 0,0000
Piso19 -0,0337 -0,0337 -0,0017 0,0000 0,9574 0,9574 0,0494 0,0000 0,0039 0,0000
Piso20 -0,0352 -0,0352 -0,0017 0,0000 1,0000 1,0001 0,0493 0,0000 0,0025 0,0000
∑∆𝑟𝑒𝑙2 0,0058

72
Tabela D.4 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 4.
Mista 4
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 -0,0003 -0,0003 -0,0004 0,0000 0,0081 0,0080 0,0102 0,0000 0,0062 0,0000
Piso2 -0,0010 -0,0010 -0,0007 0,0000 0,0286 0,0285 0,0197 0,0000 0,0096 0,0001
Piso3 -0,0021 -0,0021 -0,0010 0,0000 0,0586 0,0585 0,0282 0,0000 0,0110 0,0001
Piso4 -0,0035 -0,0035 -0,0013 0,0000 0,0959 0,0959 0,0359 0,0000 0,0115 0,0001
Piso5 -0,0051 -0,0051 -0,0015 0,0000 0,1392 0,1391 0,0424 0,0000 0,0114 0,0001
Piso6 -0,0068 -0,0068 -0,0018 0,0000 0,1873 0,1873 0,0481 0,0000 0,0111 0,0001
Piso7 -0,0087 -0,0087 -0,0019 0,0000 0,2394 0,2394 0,0529 0,0000 0,0106 0,0001
Piso8 -0,0107 -0,0107 -0,0021 0,0000 0,2946 0,2946 0,0569 0,0000 0,0101 0,0001
Piso9 -0,0128 -0,0128 -0,0022 0,0000 0,3523 0,3523 0,0601 0,0000 0,0095 0,0001
Piso10 -0,0150 -0,0150 -0,0023 0,0000 0,4117 0,4117 0,0626 0,0000 0,0089 0,0001
Piso11 -0,0172 -0,0172 -0,0024 0,0000 0,4723 0,4723 0,0645 0,0000 0,0083 0,0001
Piso12 -0,0194 -0,0194 -0,0024 0,0000 0,5335 0,5336 0,0658 0,0000 0,0075 0,0001
Piso13 -0,0217 -0,0217 -0,0024 0,0000 0,5949 0,5949 0,0667 0,0000 0,0068 0,0000
Piso14 -0,0239 -0,0239 -0,0024 0,0000 0,6559 0,6559 0,0671 0,0000 0,0060 0,0000
Piso15 -0,0261 -0,0261 -0,0024 0,0000 0,7162 0,7162 0,0672 0,0000 0,0052 0,0000
Piso16 -0,0282 -0,0283 -0,0024 0,0000 0,7755 0,7755 0,0670 0,0000 0,0044 0,0000
Piso17 -0,0304 -0,0304 -0,0024 0,0000 0,8335 0,8336 0,0667 0,0000 0,0035 0,0000
Piso18 -0,0324 -0,0324 -0,0024 0,0000 0,8903 0,8903 0,0663 0,0000 0,0026 0,0000
Piso19 -0,0345 -0,0345 -0,0024 0,0000 0,9459 0,9458 0,0660 0,0000 0,0019 0,0000
Piso20 -0,0364 -0,0364 -0,0024 0,0000 1,0000 1,0003 0,0658 0,0000 0,0013 0,0000
∑∆𝑟𝑒𝑙2 0,0013

73
Tabela D.5 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 5.
Mista 5
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 -0,0003 -0,0003 -0,0003 -0,0004 0,0066 0,0066 0,0082 0,0101 0,0114 0,0001
Piso2 -0,0009 -0,0009 -0,0006 -0,0008 0,0242 0,0242 0,0162 0,0196 0,0208 0,0004
Piso3 -0,0020 -0,0020 -0,0009 -0,0011 0,0508 0,0508 0,0241 0,0283 0,0283 0,0008
Piso4 -0,0033 -0,0033 -0,0012 -0,0014 0,0851 0,0851 0,0316 0,0361 0,0342 0,0012
Piso5 -0,0048 -0,0048 -0,0015 -0,0016 0,1256 0,1256 0,0388 0,0430 0,0388 0,0015
Piso6 -0,0066 -0,0066 -0,0017 -0,0019 0,1715 0,1715 0,0455 0,0489 0,0422 0,0018
Piso7 -0,0085 -0,0085 -0,0020 -0,0021 0,2218 0,2218 0,0518 0,0541 0,0446 0,0020
Piso8 -0,0106 -0,0106 -0,0022 -0,0022 0,2757 0,2757 0,0576 0,0584 0,0462 0,0021
Piso9 -0,0128 -0,0128 -0,0024 -0,0024 0,3326 0,3326 0,0629 0,0619 0,0470 0,0022
Piso10 -0,0150 -0,0150 -0,0026 -0,0025 0,3916 0,3916 0,0678 0,0647 0,0472 0,0022
Piso11 -0,0174 -0,0174 -0,0028 -0,0026 0,4523 0,4523 0,0720 0,0669 0,0469 0,0022
Piso12 -0,0197 -0,0197 -0,0029 -0,0026 0,5140 0,5140 0,0758 0,0686 0,0460 0,0021
Piso13 -0,0221 -0,0221 -0,0030 -0,0027 0,5763 0,5763 0,0791 0,0697 0,0448 0,0020
Piso14 -0,0245 -0,0245 -0,0031 -0,0027 0,6387 0,6387 0,0819 0,0704 0,0433 0,0019
Piso15 -0,0269 -0,0269 -0,0032 -0,0027 0,7008 0,7008 0,0842 0,0707 0,0415 0,0017
Piso16 -0,0293 -0,0293 -0,0033 -0,0027 0,7623 0,7623 0,0861 0,0707 0,0396 0,0016
Piso17 -0,0316 -0,0316 -0,0034 -0,0027 0,8231 0,8231 0,0876 0,0706 0,0378 0,0014
Piso18 -0,0339 -0,0339 -0,0034 -0,0027 0,8830 0,8830 0,0887 0,0704 0,0360 0,0013
Piso19 -0,0362 -0,0362 -0,0034 -0,0027 0,9421 0,9421 0,0894 0,0702 0,0346 0,0012
Piso20 -0,0384 -0,0384 -0,0034 -0,0027 1,0000 1,0000 0,0897 0,0700 0,0331 0,0011
∑∆𝑟𝑒𝑙2 0,0309

74
Tabela D.6 – Cálculo do deslocamento relativo entre as extremidades do dissipador no modelo Mista 6.
Mista 6
Designação 𝜙𝐻 𝜙𝑉 𝜙𝐻,𝑛𝑜𝑟𝑚 𝜙𝑉,𝑛𝑜𝑟𝑚
∆𝑟𝑒𝑙 ∆𝑟𝑒𝑙2
𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖 𝑖 − 1 𝑖
Piso0 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Piso1 0,0002 0,0002 0,0002 0,0003 0,0051 0,0051 0,0081 0,0089 0,0095 0,0001
Piso2 0,0006 0,0006 0,0005 0,0005 0,0192 0,0192 0,0161 0,0175 0,0169 0,0003
Piso3 0,0013 0,0013 0,0007 0,0008 0,0416 0,0416 0,0239 0,0256 0,0234 0,0005
Piso4 0,0021 0,0021 0,0009 0,0010 0,0712 0,0712 0,0315 0,0332 0,0290 0,0008
Piso5 0,0032 0,0032 0,0012 0,0012 0,1074 0,1074 0,0387 0,0401 0,0336 0,0011
Piso6 0,0045 0,0045 0,0014 0,0014 0,1492 0,1492 0,0456 0,0463 0,0374 0,0014
Piso7 0,0059 0,0059 0,0016 0,0016 0,1960 0,1960 0,0522 0,0518 0,0404 0,0016
Piso8 0,0074 0,0074 0,0018 0,0017 0,2471 0,2471 0,0582 0,0566 0,0427 0,0018
Piso9 0,0091 0,0091 0,0019 0,0018 0,3018 0,3018 0,0638 0,0608 0,0443 0,0020
Piso10 0,0108 0,0108 0,0021 0,0019 0,3596 0,3596 0,0690 0,0643 0,0454 0,0021
Piso11 0,0126 0,0126 0,0022 0,0020 0,4197 0,4197 0,0736 0,0673 0,0459 0,0021
Piso12 0,0145 0,0145 0,0023 0,0021 0,4818 0,4818 0,0778 0,0697 0,0460 0,0021
Piso13 0,0164 0,0164 0,0024 0,0022 0,5452 0,5452 0,0814 0,0716 0,0457 0,0021
Piso14 0,0183 0,0183 0,0025 0,0022 0,6097 0,6097 0,0846 0,0731 0,0451 0,0020
Piso15 0,0203 0,0203 0,0026 0,0022 0,6747 0,6747 0,0873 0,0742 0,0443 0,0020
Piso16 0,0222 0,0222 0,0027 0,0023 0,7401 0,7401 0,0895 0,0749 0,0433 0,0019
Piso17 0,0242 0,0242 0,0027 0,0023 0,8054 0,8054 0,0912 0,0754 0,0423 0,0018
Piso18 0,0262 0,0262 0,0028 0,0023 0,8707 0,8707 0,0925 0,0757 0,0413 0,0017
Piso19 0,0281 0,0281 0,0028 0,0023 0,9358 0,9358 0,0933 0,0759 0,0405 0,0016
Piso20 0,0301 0,0301 0,0028 0,0023 1,0000 1,0000 0,0937 0,0759 0,0393 0,0015
∑∆𝑟𝑒𝑙2 0,0306

75
Anexo E – Espetro de resposta com amortecimento inicial
(ξi=5%) e com amortecimento equivalente (ξeq=15,4%)
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2)
Período, T (s)
Mista 2
5% 15,4%
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2)
Período, T (s)
Mista 3
5% 15,4%
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2 )
Período, T (s)
Mista 4
5% 15,4%

76
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2 )
Período, T (s)
Mista 5
5% 15,4%
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,50 1,00 1,50 2,00 2,50
Ace
lera
çao
(m
/s2 )
Período, T (s)
Mista 6
5% 15,4%





























