Embed Size (px)
Citation preview

Estudo e Dimensionamento de um Sistema de Alimentação
de Emergência para uma Carga Crítica
Rodrigo Filipe Águas Alexandre
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Orientadores: Profª. Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Prof. Doutor João José Esteves Santana
Júri
Presidente: Profª. Maria Eduarda de Sampaio Pinto de Almeida Pedro
Orientador: Profª. Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Vogal: Eng. Ricardo Filipe Mendes André
Outubro 2014

ii
Agradecimentos
Durante o período de elaboração desta dissertação foram muitas as pessoas que, de uma
forma direta ou indireta, contribuíram para o desenvolvimento da mesma.
Em particular quero agradecer:
À Professora Sónia Pinto pela sua orientação e sabedoria, e em especial pela sua constante
disponibilidade e paciência, as quais foram imprescindíveis no decorrer desta tese. Sem a sua
dedicação e ajuda teria sido muito mais difícil o avanço do trabalho de forma consistente.
Ao Professor João Santana pela disponibilidade e pelo apoio, os quais foram muito
importantes no decurso do trabalho.
Aos meus colegas e amigos que me apoiaram e acompanharam não só ao longo da
elaboração desta tese, mas também ao longo de todo o curso.
À minha família, em particular aos meus pais, José da Avó e Maria Fernanda Alexandre, pelo
apoio e compreensão ao longo deste percurso, e pelos sacrifícios que fizeram e que me permitiram
frequentar este curso.
À minha “sogra”, Maria de Jesus, pela ajuda na revisão do documento desta tese a nível de
escrita.
À minha namorada, Adriana Santos, pelo apoio, paciência e compreensão, pelas vezes em
que foi necessário abdicar da minha companhia ao longo da elaboração desta tese, e em especial
pela força que me deu nos momentos em que fraquejava.
A todos, um muito obrigado.
iii
Resumo
O Sistema Elétrico foi projetado para garantir que a energia elétrica está sempre disponível,
contudo existem incidentes que podem originar perturbações no fornecimento contínuo desta, cujo
impacto pode originar consequências graves em sistemas economicamente ou eticamente sensíveis
a essas perturbações. Estes sistemas são chamados Sistemas com Alimentação Crítica. Para estes
sistemas é necessário providenciar uma fonte de energia elétrica de qualidade, fiável e ininterrupta.
Nesse âmbito, faz-se nesta dissertação o dimensionamento dum Sistema de Alimentação de
Emergência que tenha capacidade para alimentar, durante um período de tempo, uma carga crítica
após uma interrupção da rede elétrica.
Inicialmente faz-se o dimensionamento do Sistema de Armazenamento de Energia. Em
seguida dimensiona-se o Sistema de Conversão constituído por um conversor DC/DC elevador e por
um conversor DC/AC com dois inversores trifásicos em paralelo. Depois dimensionam-se os
controladores, onde se incluem os controladores de corrente e tensão DC e AC, e estabelece-se um
sistema Supervisor que faça o controlo automático do sistema. Finalmente apresentam-se os
resultados das tensões e correntes na BT e na carga e das grandezas do Sistema de
Armazenamento de Energia em todos os estados e transições possíveis.
Conclui-se que o sistema dimensionado tem a capacidade de fornecer a potência necessária
à carga crítica, durante o período estabelecido, no caso da existência duma interrupção na rede.
Observa-se também a capacidade da rede de carregar o Sistema de Armazenamento de Energia
quando necessário.
Palavras chave: Carga crítica, Sistema de Alimentação de Emergência, Sistema de
Armazenamento de Energia, rede elétrica, interrupção, fornecimento contínuo.

iv
Abstract
The electrical system was designed to ensure that electrical power is always available,
however there are incidents that can cause disturbances in the continuous supply, the impact of which
can lead to serious consequences in systems economically or ethically sensitive to these
disturbances. These systems are called Critical Power Systems. For these it’s necessary to provide
reliable, uninterrupted and quality electric power sources.
In this context, it’s done in this dissertation the design of an Emergency Power System with
the ability to feed over a period of time, a critical load after an interruption of the mains.
Initially the Energy Storage System is sized. Then the Conversion System which consists of a
DC/DC boost converter and a DC/AC converter with two three-phase inverters in parallel is designed.
After, the controllers, which includes DC and AC current and voltage controllers, are designed and is
established a Supervisor system that controls automatically the system. Finally it’s presented the
results, in all states and possible transitions, of the voltages and currents in the Low Voltage, load and
Energy Storage System.
It’s concluded that the proposed system has the ability to provide the necessary power to the
critical load, during the established period, in case of an interruption of the mains. It’s also observed
the ability of the mains to charge the Energy Storage System when needed.
Keywords: Critical load, Emergency Power System, Energy Storage System, mains,
interruption, continuous supply.

v
Lista de Figuras
Figura 1.1 – Fonte de alimentação ininterruptível (UPS) [Silva, 2012].…………………………… 3
Figura 1.2 – Esquema Geral do Sistema proposto………………………………………………….. 4
Figura 2.1 – Potência versus Energia nos vários SAE [Silva, 2012].……………………………… 6
Figura 2.2 – Custo típico dos vários SAE [Silva, 2012].…………………………………………….. 7
Figura 2.3 – Modelo simples de uma bateria………………………………………………………… 8
Figura 2.4 – Modelo overvoltage de uma bateria……………………………………………………. 8
Figura 2.5 – Circuito equivalente da bateria fornecida pela biblioteca SimPowerSystems…….. 9
Figura 2.6 – Curva de descarga típica de uma bateria……………………………………………… 10
Figura 2.7 – Curva de carga típica de uma bateria………………………………………………….. 10
Figura 2.8 – Curva de descarga do SAE……………………………………………………………… 12
Figura 2.9 – Corrente fornecida pelo SAE……………………………………………………………. 13
Figura 2.10 – State Of Charge (SOC) do SAE………………………………………………………… 13
Figura 3.1 – Representação do Sistema Global de Conversão……………………………………. 14
Figura 3.2 – Inversor Trifásico…………………………………………………………………………. 15
Figura 3.3 – Estados possíveis dos dispositivos semicondutores no inversor trifásico……… 16
Figura 3.4 – Modulador SPWM, portadora, modulante e sinal 𝛾 de cada um dos dispositivos
semicondutores……………………………………………………………………………
18
Figura 3.5 – Filtro LC do conversor DC/AC para uma das fases…………………………............ 20
Figura 3.6 – Diagrama de Bode do filtro LC………………………………………………………….. 21
Figura 3.7 – Conversor DC/DC do tipo elevador…………………………………………………….. 21
Figura 3.8 – Conversor DC/DC elevador no modo 𝛾𝐷𝐶 = 0………………………………………… 22
Figura 3.9 – Conversor DC/DC elevador no modo 𝛾𝐷𝐶 = 1………………………………………… 23
Figura 3.10 – Formas de onda ideais no conversor DC/DC elevador………………………………. 23
Figura 4.1 – Esquema do sistema de controlo de corrente do inversor…………………………… 26
Figura 4.2 – Transformação de Clarke………………………………………………………………... 27

vi
Figura 4.3 – Transformação de Park………………………………………………………………….. 28
Figura 4.4 – Princípio de funcionamento do PLL [Teodorescu, et al, 2004]..…………………….. 28
Figura 4.5 – Diagrama de blocos do sistema com desacoplamento de corrente………………… 29
Figura 4.6 – Diagrama de blocos do controlador de corrente……………………………………… 30
Figura 4.7 – Modelo utilizado no dimensionamento do controlador de tensão AC………………. 32
Figura 4.8 – Diagrama de blocos do controlador de tensão AC com controlo interno de
corrente…………………………………………………………………………………….
33
Figura 4.9 – Controlador não-linear de corrente……………………………………………………... 34
Figura 4.10 – Esquema de implementação do sistema de controlo de tensão……………………. 37
Figura 4.11 – Fluxograma do Supervisor....................................................................................... 38
Figura 4.12 – Diagrama das transições entre os estados de funcionamento do sistema.............. 39
Figura 5.1 – Estado de ligação à rede elétrica e estado de funcionamento do sistema.............. 40
Figura 5.2 – Grandezas do Sistema de Armazenamento de Energia. a) Estado de carga do
SAE; b) Corrente do SAE; c) Tensão do SAE..........................................................
41
Figura 5.3 – Tensões e correntes AC na BT no Estado 1, com rede ligada e SOC=100%......... 42
Figura 5.4 – Tensões e correntes AC na BT no Estado 2, com rede ligada e SOC<100%......... 42
Figura 5.5 – Tensões e correntes AC na BT no Estado 3, modo rede isolada e SOC≥20%....... 42
Figura 5.6 – Tensões e correntes AC na BT no Estado 4, modo rede isolada e SOC<20%....... 43
Figura 5.7 – Taxa de Distorção Harmónica (THD) das correntes AC na BT no Estado 2, com
rede ligada e SOC<100%.........................................................................................
43
Figura 5.8 – Tensões e correntes da Rede MT no Estado 1 com SOC=100%............................ 44
Figura 5.9 – Tensões e correntes da Rede MT no Estado 2 com SOC<100%............................ 44
Figura 5.10 – Tensões e correntes na carga no Estado 1, com rede ligada e SOC=100%........... 45
Figura 5.11 – Tensões e correntes na carga no Estado 2, com rede ligada e SOC<100%........... 45
Figura 5.12 – Tensões e correntes na carga no Estado 3, modo rede isolada e SOC≥20%........ 46
Figura 5.13 – Tensões e correntes na carga no Estado 4, modo rede isolada e SOC<20%......... 46
Figura 5.14 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 1 para 3....................................................................................
47
Figura 5.15 – Frequência da rede elétrica na transição de Estado 1 para 3.................................. 47

vii
Figura 5.16 – Valor eficaz da tensão na rede de MT na transição de Estado 1 para 3…………… 47
Figura 5.17 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 1
para 3. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
48
Figura 5.18 – Tensões e correntes AC na BT na transição de Estado 1 para 3............................ 48
Figura 5.19 – Tensões e correntes na carga na transição de Estado 1 para 3.............................. 49
Figura 5.20 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 3 para 2....................................................................................
49
Figura 5.21 – Diferença de fase em valor absoluto entre a tensão da rede elétrica e a tensão
de saída do Sistema de Alimentação de Emergência na transição do Estado 3
para 2.......................................................................................................................
50
Figura 5.22 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 3
para 2. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
50
Figura 5.23 – Tensões e correntes AC na BT na transição de Estado 3 para 2............................ 51
Figura 5.24 – Tensões e correntes na carga na transição de Estado 3 para 2.............................. 51
Figura 5.25 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 2 para 3....................................................................................
52
Figura 5.26 – Frequência da rede elétrica na transição de Estado 2 para 3.................................. 52
Figura 5.27 – Valor eficaz da tensão na rede de MT na transição de Estado 2 para 3…………… 53
Figura 5.28 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 2
para 3. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
53
Figura 5.29 – Tensões e correntes AC na BT na transição de Estado 2 para 3............................ 54
Figura 5.30 – Tensões e correntes na carga na transição de Estado 2 para 3.............................. 54
Figura 5.31 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 3 para 4....................................................................................
55
Figura 5.32 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 3
para 4. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
55
Figura 5.33 – Tensões e correntes AC na BT na transição de Estado 3 para 4............................ 56
Figura 5.34 – Tensões e correntes na carga na transição de Estado 3 para 4.............................. 56
Figura 5.35 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 4 para 2....................................................................................
57
Figura 5.36 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 4
para 2. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
57
Figura 5.37 – Tensões e correntes AC na BT na transição de Estado 4 para 2............................ 58
Figura 5.38 – Tensões e correntes na carga na transição de Estado 4 para 2.............................. 58

viii
Figura 5.39 – Estado de ligação à rede elétrica e estado de funcionamento do sistema na
transição de Estado 2 para 1....................................................................................
59
Figura 5.40 – Grandezas do Sistema de Armazenamento de Energia na transição de Estado 2
para 1. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.........
59
Figura 5.41 – Tensões e correntes AC na BT na transição de Estado 2 para 1............................ 60
Figura 5.42 – Tensões e correntes na carga na transição de Estado 2 para 1.............................. 60
Figura 5.43 – Valor eficaz da tensão na rede MT em carga máxima……………………………….. 61
Figura 5.44 – Valor eficaz da tensão na rede MT em meia carga…………………………………... 61
Figura 5.45 – Valor eficaz da tensão na rede MT em vazio………………………………………….. 62
Figura 5.46 – Valor eficaz da tensão na rede MT com Scc=100 MVA em situação de cava com
injeção de energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟓𝟎𝟎 𝑨)……………………………………………
62
Figura 5.47 – Valor eficaz da tensão na rede MT com Scc=25 MVA em situação de cava com
injeção de energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟓𝟎𝟎 𝑨).............................................................
63
Figura 5.48 – Valor eficaz da tensão na rede MT com Scc=100 MVA em situação de cava com
injeção de energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟕𝟓𝟎 𝑨).............................................................
63
Figura 5.49 – Valor eficaz da tensão na rede MT com Scc=25 MVA em situação de cava com
injeção de energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟕𝟓𝟎 𝑨).............................................................
63
ix
Lista de Tabelas
Tabela 2.1 – Especificações da bateria………………..…………………………………………………. 11
Tabela 3.1 – Estados possíveis de ligação dos semicondutores no inversor trifásico e tensões
resultantes………………………………..……………………………………………………
17
Tabela 5.1 – Variação do valor eficaz da tensão na rede MT numa situação de cava de tensão
nos casos estudados....................................................................................................
64

x
Lista de Símbolos
𝛼𝑖 Ganho do sensor de corrente
𝛼𝑣 Ganho do sensor de tensão AC
𝛼𝑣𝑏 Ganho do sensor de tensão DC
∆𝑖𝐿𝑖 Variação da corrente na bobine 𝐿𝑖
∆𝑖𝐿𝑚 á𝑥 Variação máxima da corrente na bobine 𝐿
∆𝑡 Período de tempo durante o qual a tensão do condensador 𝐶0varia entre o
seu valor máximo e mínimo, recebendo uma potência 𝑃0
𝛿 Fator de ciclo de comutação
휀 Valor máximo de𝑒𝑖𝐿𝑖
𝜉 Coeficiente de amortecimento
𝜃 Fase do inversor
𝜑 Fase da rede
𝛾𝐷𝐶 Função de comando dos semicondutores do conversor DC/DC
𝛾𝑘 Função de comando do braço k do inversor trifásico
𝜔 Frequência angular
𝜔0 Frequência angular do polinómio de 3ª ordem
𝜔𝑛 Frequência natural de oscilação do sistema de 2ª ordem não amortecido
𝐶 Condensador do filtro de saída dos inversores
𝐶𝑖𝑑𝑞 𝑠 Compensador PI do controlador de corrente AC
𝐶0 Condensador de saída do conversor DC/DC
𝑒𝑖𝐿𝑖 Erro de controlo do controlador não-linear de corrente
𝑓 Frequência fundamental
𝑓𝐷𝐶 Frequência de comutação do conversor DC/DC
𝑓𝐷𝐶𝑚 á𝑥 Frequência de comutação máxima do conversor DC/DC
𝑓𝐿𝐶 Frequência de ressonância do filtro 𝐿𝐶

xi
𝑓𝑝 Frequência da portadora
i(t) Corrente da bateria
𝐺2 𝑠 Função de transferência de 2ª ordem na forma canónica
𝐺𝑐 𝑠 Modelo do modulador mais inversor
𝐺𝑑 𝑠 Função de transferência do controlador de corrente AC
𝐺𝑣 Ganho do modelo do controlo interno de corrente para o controlo das tensões
AC
𝐺𝑣𝑏 Ganho do modelo do controlo interno de corrente para o controlo da tensão
DC
𝑖𝐶 Corrente no condensador 𝐶
𝐼𝑐𝑎𝑟𝑔𝑎 Fonte de Corrente representativa da carga vista do condensador 𝐶
𝐼𝑑𝑒𝑠 _𝑛𝑜𝑚 Corrente de descarga nominal da bateria
𝐼𝑑𝑞 _𝑟𝑒𝑓 Referência da corrente do controlo interno de corrente
𝐼𝑖𝑛𝑣 Fonte de corrente representativa do conjunto dos inversores e bobines de
filtragem
𝐼𝐿𝑒𝑓 Corrente eficaz na bobine 𝐿
𝐼𝐿𝑖 Corrente na bobine 𝐿𝑖
𝐼𝐿𝑖_𝑟𝑒𝑓 Referência para a corrente na bobine 𝐿𝑖
𝐾𝐷 Ganho do modelo do modulador mais inversor
𝐾𝑖𝑏 Ganho integral do compensador PI do controlo de tensão DC
𝐾𝑖𝑖 Ganho integral do compensador PI do controlo de corrente AC
𝐾𝑖𝑣 Ganho integral do compensador PI do controlo de tensão AC
𝑘𝐿 Ganho do controlo não-linear de corrente
𝐾𝑝𝑏 Ganho proporcional do compensador PI do controlo de tensão DC
𝐾𝑝𝑖 Ganho proporcional do compensador PI do controlo de corrente AC
𝐾𝑝𝑣 Ganho proporcional do compensador PI do controlo de tensão AC
𝐿 Bobine do filtro de saída dos inversores
𝐿𝑖 Bobine de entrada do conversor DC/DC
𝑚𝑖 Índice de modulação

xii
𝑁𝐵𝑎𝑡 _𝑝𝑎𝑟 Número de baterias em paralelo
𝑁𝐵𝑎𝑡 _𝑝𝑎𝑟 𝑚𝑖𝑛 Número mínimo de baterias em paralelo
𝑁𝐵𝑎𝑡 _𝑠𝑒𝑟 Número de baterias em série
𝑝 Índice de pulsação
𝑃 Potência ativa do sistema
𝑃3 𝑠 Polinómio de 3ª ordem
𝑃𝐴𝐶 Potência ativa de saída do conversor DC/AC
𝑃𝑖 Potência de entrada do conversor DC/DC
𝑃𝐿𝐿 Phase-Locked-Loop
𝑃𝑟𝐿 Potência de perdas na resistência da bobine
𝑃0 Potência de saída do conversor DC/DC
𝑄 Potência reativa
QB Carga máxima da bateria
𝑅 Resistência vista do ponto de vista do controlador de corrente AC
𝑟 𝑡 Portadora triangular da modulação SPWM
𝑟𝐿 Resistência de perdas na bobine
𝑅0 Resistência equivalente vista à saída do filtro LC
𝑆 Potência do sistema
SAE Sistema de Armazenamento de Energia
SMES Superconducting Magnetic Energy Storage
SOC Estado de Carga
SPWM Sinusoidal Wave Pulse Width Modulation
SVM Space Vector Modulation
𝑇𝐶 Período de comutação do inversor
𝑇𝐷 Tempo médio de atraso do modelo do modulador mais inversor
𝑇𝐷𝐶 Período de comutação do conversor DC/DC
𝑇𝑑𝑏 Constante de tempo para o controlo de tensão AC
xiii
𝑇𝑑𝑣 Constante de tempo do modelo do controlo interno de corrente
𝑇𝑝𝑖 Constante de tempo do compensador PI do controlo de corrente AC
𝑇𝑧𝑖 Zero do compensador PI do controlador de corrente AC
𝑢𝑐𝑚 á𝑥 Valor máximo da portadora triangular
𝑈𝑑𝑐 Tensão contínua de entrada do conversor DC/AC
𝑈𝑑𝑐 𝑚á𝑥 Valor máximo da tensão 𝑈𝑑𝑐
𝑈𝑑𝑐 𝑚𝑖𝑛 Valor mínimo da tensão 𝑈𝑑𝑐
UPS Uninterruptible Power Supply
𝑉𝐴𝐵 Tensão composta entre os braços A e B do inversor
𝑉𝐵𝐶 Tensão composta entre os braços B e C do inversor
𝑉𝐶𝐴 Tensão composta entre os braços C e A do inversor
𝑉𝐶 Tensão no condensador 𝐶
𝑉𝐵𝑎𝑡 Tensão do Sistema de Armazenamento de Energia
𝑉𝑘 Tensão no braço k do inversor
𝑉𝑘𝑁 Tensão simples no braço k do inversor
𝑉𝐿𝑖 Tensão na bobine 𝐿𝑖
𝑉𝐿𝑖𝑎𝑣 Valor médio da tensão na bobine 𝐿𝑖
𝑉𝑃𝑊𝑀 Tensão PWM de saída do inversor
𝑉𝑟𝑒𝑑𝑒 Tensão simples da rede em Baixa Tensão
xiv
Índice
AGRADECIMENTOS .............................................................................................................................. II
RESUMO ................................................................................................................................................ III
ABSTRACT ............................................................................................................................................ IV
LISTA DE FIGURAS ............................................................................................................................... V
LISTA DE TABELAS ............................................................................................................................. IX
LISTA DE SÍMBOLOS ............................................................................................................................ X
ÍNDICE ..................................................................................................................................................XIV
1. INTRODUÇÃO ................................................................................................................................ 2
1.1. OBJETIVOS DO TRABALHO .......................................................................................................... 4
1.2. ESTRUTURA DO TRABALHO ......................................................................................................... 5
2. SISTEMA DE ARMAZENAMENTO DE ENERGIA ........................................................................ 6
2.1. ESTADO DA ARTE ....................................................................................................................... 6
2.2. MODELO UTILIZADO ................................................................................................................... 9
2.3. CARACTERÍSTICAS TÉCNICAS ................................................................................................... 11
3. SISTEMAS DE CONVERSÃO ...................................................................................................... 14
3.1. SISTEMA DE CONVERSÃO DC/AC ............................................................................................. 15
3.1.1. Comando dos Inversores .............................................................................................. 17
3.1.2. Dimensionamento das Bobines e Condensadores ....................................................... 19
3.2. SISTEMA DE CONVERSÃO DC/DC ............................................................................................. 21
3.2.1. Comando do Conversor ................................................................................................ 22
3.2.2. Dimensionamento da Bobine e Condensador ............................................................... 24
4. CONTROLADORES ..................................................................................................................... 26
4.1. CONTROLO DAS CORRENTES AC .............................................................................................. 26
4.2. CONTROLO DAS TENSÕES AC .................................................................................................. 32
4.3. CONTROLO DA CORRENTE DC ................................................................................................. 34
4.4. CONTROLO DA TENSÃO DC ...................................................................................................... 36
4.5. SUPERVISOR ........................................................................................................................... 37
5. RESULTADOS .............................................................................................................................. 40
6. CONCLUSÕES ............................................................................................................................. 65
6.1. PERSPETIVAS DE TRABALHO FUTURO ....................................................................................... 66
BIBLIOGRAFIA ..................................................................................................................................... 67
ANEXO .................................................................................................................................................. 69


2
1. Introdução
A energia é uma necessidade básica para o desenvolvimento económico de um país. É
praticamente impossível estimar a preponderância real que a energia teve no desenvolvimento e
crescimento da civilização atual.
A disponibilidade de grandes quantidades de energia nos tempos modernos resultou numa
diminuição das horas diárias de trabalho, maior produção agrícola e industrial, melhores e mais
rápidos transportes, entre outros. Aliás, pode-se considerar que existe uma relação muito próxima
entre o consumo de energia por pessoa e a sua qualidade de vida, o que por seu lado leva a que
quanto maior for o consumo de energia per capita de um país, normalmente, melhor é a qualidade de
vida dos seus cidadãos [NCT].
A energia existe em diversas formas na natureza, mas a mais importante é a energia elétrica,
por diversas razões, tais como [NCT]:
O facto de poder ser facilmente transformada noutras formas de energia;
O facto de as máquinas operadas a eletricidade terem um controlo e operação
simples;
O facto de ter um custo de produção bastante inferior quando comparado com outras
formas de energia;
O facto de ser possível transportar a energia elétrica a grandes distâncias com
perdas bastante reduzidas.
A sociedade moderna tornou-se tão dependente da energia elétrica que esta se tornou um
bem indispensável, parte integrante da nossa vida, de tal forma que uma falha de energia elétrica
torna a sociedade e economia incapacitadas. Por isso as centrais de produção de energia elétrica são
projetadas e controladas de forma a garantirem que a energia elétrica está virtualmente sempre
disponível.
No entanto, existem incidentes que podem originar perturbações no fornecimento contínuo de
energia elétrica, cujo impacto tem consequências gravosas em sistemas que são economicamente ou
eticamente sensíveis a essas perturbações, os chamados sistemas com alimentação crítica de
energia, dos quais se podem destacar [Silva, 2013]:
Redes de comunicação de dados;
Redes de telecomunicações;

3
Centros de cuidados médicos;
Laboratórios;
Bancos;
Controlo de processos industriais;
Transportes, entre outros.
Para estes sistemas que não podem deixar de funcionar, mesmo que falhe a rede principal de
energia elétrica, é necessário providenciar uma fonte de energia elétrica de qualidade, fiável e
ininterrupta. A solução para esta fonte é a utilização de sistemas de alimentação de emergência e
reserva, baseados em inversores comutados, baterias, grupos geradores térmicos, ou fontes de
energia alternativas e renováveis. A potência destes sistemas pode variar desde a dezena de Watt
em instalações remotas, até dezenas de MW em centros de cálculo e processamento de dados.
Os sistemas de alimentação ininterruptíveis (Uninterruptible Power Supply – UPS) têm como
objetivo continuar a alimentar, durante um certo tempo, as cargas críticas a que estão ligados durante
uma falha da rede principal de energia elétrica, de tal forma que estas não sejam afetadas por esses
incidentes, a fim de evitar danos materiais, económicos ou éticos [Silva, 2013].
Uma UPS, Figura 1.1, é constituída por três subsistemas essenciais: o carregador, o sistema
de armazenamento de energia e o inversor que converte a tensão contínua, proveniente do sistema
de armazenamento de energia, em tensão alternada utilizável pela carga. Nalgumas topologias
também é fundamental a existência de um relé de transferência. Adicionalmente, uma UPS pode
conter outros subsistemas, de forma a melhorar a sua fiabilidade e robustez.
Figura 1.1 – Fonte de alimentação ininterruptível (UPS) [Silva, 2012]
O tipo, a interligação e o modo de funcionamento dos três subsistemas essenciais de uma
UPS determinam as características, comportamento, qualidades e pontos fracos da mesma.
As UPS podem ser divididas em:
4
Em relação ao sistema de armazenamento de energia:
o Estáticas (sem componentes móveis);
o Dinâmicas (com componentes móveis).
Em relação à sua interligação e modo de funcionamento:
o UPS paralela (off-line);
o UPS série ou de dupla conversão (on-line);
o UPS interativa (line interative).
As UPS do tipo estático usam principalmente conversores comutados e baterias ou outras
formas de armazenamento de energia sem componentes móveis tais como, células de combustível,
supercondensadores, bobines supercondutoras, entre outros. Já as UPS dinâmicas usam volantes de
inércia (flywheels) ou outras máquinas rotativas.
As UPS do tipo paralelo estão, usualmente, em espera, sendo a carga alimentada pela rede
elétrica. No caso de falha da rede, um relé de transferência atua, passando a carga a ser alimentada
pelo inversor enquanto o sistema de armazenamento de energia tiver energia suficiente. Nas UPS do
tipo série, a carga é sempre alimentada diretamente pela UPS mesmo quando a rede elétrica está a
funcionar perfeitamente bem. As UPS interativas diferem fundamentalmente das anteriores, pois
usam um único conversor para realizar, em simultâneo, as funções de carregador e inversor [Silva,
2013].
1.1. Objetivos do trabalho
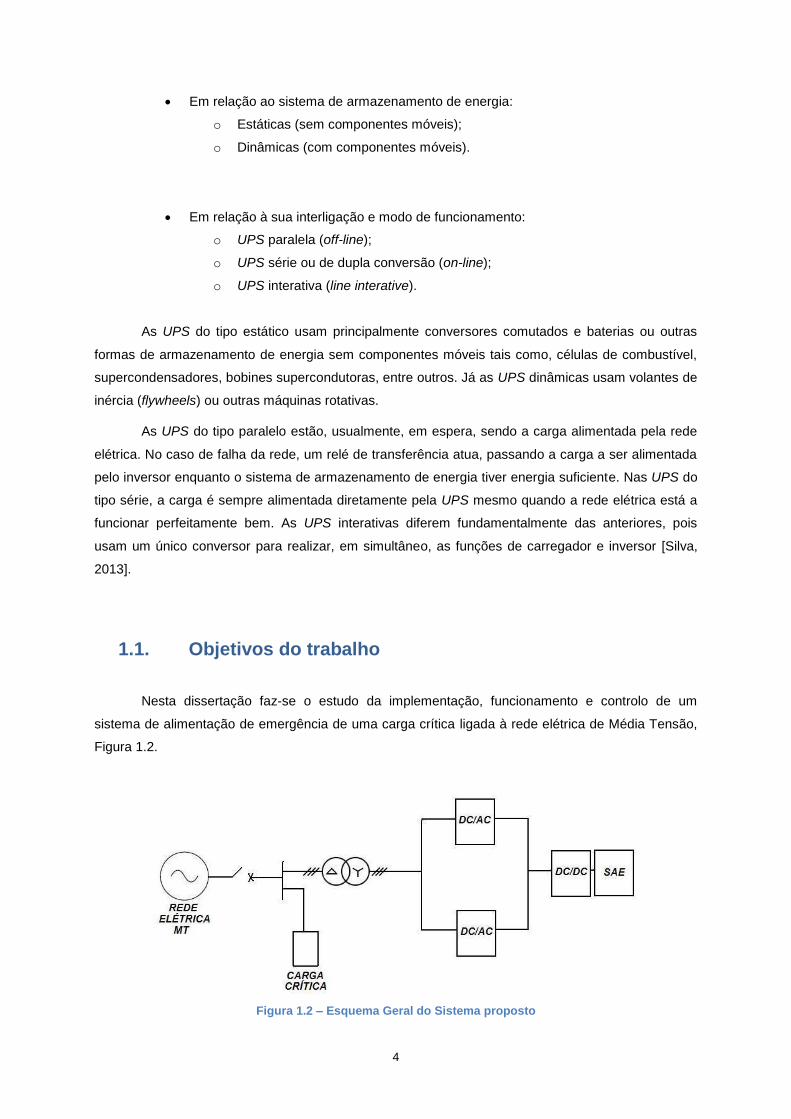
Nesta dissertação faz-se o estudo da implementação, funcionamento e controlo de um
sistema de alimentação de emergência de uma carga crítica ligada à rede elétrica de Média Tensão,
Figura 1.2.
Figura 1.2 – Esquema Geral do Sistema proposto

5
O Sistema de Alimentação de Emergência deve respeitar o princípio de funcionamento de
uma UPS do tipo interativo, em que as funções de carregador e inversor devem ser realizadas em
simultâneo pelo mesmo conversor, pelo que para isso todo o sistema de conversão tem que respeitar
uma topologia bidirecional.
Quando a rede elétrica estiver a funcionar convenientemente, esta deve ser capaz de
fornecer a potência necessária à carga crítica e, caso o Sistema de Armazenamento de Energia não
esteja totalmente carregado, fornecer também energia para carregá-lo, caso contrário o Sistema de
Alimentação de Emergência deve ficar em espera. Quando a rede elétrica tiver uma falha, o Sistema
de Alimentação de Emergência deve ter a capacidade de alimentar a carga crítica enquanto tiver
energia suficiente.
1.2. Estrutura do Trabalho
Esta tese encontra-se dividida em seis capítulos, os quais são descritos em seguida:
No primeiro capítulo faz-se a introdução ao tema, apresentam-se os objetivos e a estrutura do
trabalho.
No segundo capítulo faz-se uma análise no estado da arte dos Sistemas de Armazenamento
de Energia, apresenta-se o modelo utilizado para simulação e faz-se o dimensionamento do mesmo.
No terceiro capítulo apresenta-se o modelo do sistema global de conversão proposto e
estuda-se em detalhe todos os seus subsistemas, apresentam-se os conversores e os respetivos
processos de modulação e dimensionam-se os seus filtros.
No quarto capítulo é explicado o modo como o sistema é controlado. Apresentam-se e
dimensionam-se os controladores que irão controlar individualmente cada subsistema. É ainda
explicado o funcionamento do Supervisor que tem como função fornecer as referências para cada
controlador de acordo com o estado do sistema geral.
No quinto capítulo apresentam-se as simulações do sistema global de modo a testar o
mesmo e faz-se uma análise dos resultados.
No sexto capítulo são apresentadas as conclusões do trabalho e são sugeridos trabalhos
futuros a realizar neste tema.

6
2. Sistema de Armazenamento de Energia
Os Sistemas de Armazenamento de Energia (SAE) têm a capacidade de armazenar energia
sob diversas formas podendo, posteriormente, voltar a aceder-se a ela através da conversão em
energia elétrica.
Os parâmetros mais importantes para a escolha de um SAE são a sua tensão e capacidade
nominal, mas também existem outros que devem ser tomados em conta, tais como: densidade de
potência e de energia, rendimento, tempo de resposta e tempo médio de vida. [Silva, 2012]
Em seguida faz-se uma descrição do estado da arte dos principais SAE.
2.1. Estado da Arte
Os SAE encontram-se divididos em três categorias: mecânicos, elétricos e eletroquímicos.
Nos mecânicos, destacam-se os volantes de inércia, ou flywheels; em relação ao
armazenamento elétrico as tecnologias mais conhecidas são os supercondensadores e os
supercondutores integrados em bobines, ou SMES (Superconducting Magnetic Energy Storage); mas
o mais utilizado tem sido o armazenamento eletroquímico, nomeadamente devido ao facto das
baterias serem uma tecnologia mais madura e também com menores custos envolvidos, quando
comparada com as anteriores.
Na Figura 2.1 conseguimos ver as características em termos de potência e energia das
diferentes formas de armazenamento de energia.
Figura 2.1 - Potência versus Energia nos vários SAE [Silva, 2012]

7
Na Figura 2.2 é apresentada uma comparação entre o custo de cada sistema e o seu tempo
de serviço.
Figura2.2 - Custo típico dos vários SAE [Silva, 2012]
Observando as duas figuras, é possível concluir que, para o sistema em questão, as baterias
são a melhor solução, devido ao seu baixo custo e às necessidades do sistema em termos de
energia, potência e tempo de serviço.
Uma bateria é um dispositivo que faz a conversão de energia química para elétrica através de
uma reação de oxidação-redução. Caso seja uma bateria recarregável, ela é carregada pelo processo
contrário.
O comportamento de uma bateria é não-linear e pode variar devido: ao estado de carga
(SOC), capacidade de armazenamento, taxa de carga/descarga, temperatura, idade da bateria ou
reações químicas secundárias que ocorrem internamente. Para simular esse comportamento existem
muitos modelos matemáticos, mas nenhum é completamente exato.
Os mais simples baseiam-se na eletroquímica, mas ignoram os efeitos da termodinâmica e
efeitos quânticos. Isto leva a que não sejam capazes de prever a variação da tensão no tempo
durante o processo de descarga, nem os efeitos da temperatura e do desgaste.
Além destes, também existem alguns esquemas elétricos equivalentes para baterias. Destes
podem-se destacar os esquemas da Figura 2.3 e 2.4. O primeiro (Fig. 2.3) consiste numa fonte de
tensão ideal e numa resistência, cujo objetivo é limitar a potência de saída da bateria. O segundo
(Fig. 2.4) consiste numa fonte de tensão ideal ligada em série com uma resistência (rbat) e o paralelo
de uma resistência (r0) com um condensador (C0) (overvoltage model) [Vargas, 2011].

8
Figura 2.3 - Modelo simples de uma bateria
Figura 2.4 - Modelo overvoltage de uma bateria
A resistência rbat representa a resistência do caminho metálico dentro da bateria e do caminho
que passa pelo eletrólito. A resistência r0 representa a resistência interna, e é causada pelo contato
não-linear entre o elétrodo e o eletrólito. O condensador C0 é a capacidade dos elétrodos em paralelo
das células.
Quanto à carga das baterias existem vários métodos de realizar a carga [Vargas, 2011]
[Moreira, 2013]:
Corrente constante - É o método de carga mais utilizado e, como o nome indica,
consiste na aplicação de uma corrente constante aos terminais da bateria. É um
método fácil de implementar, de baixo custo e que conduz a circuitos de carga
simples. No entanto, o uso de correntes elevadas é prejudicial para baterias sensíveis
à sobrecarga e o uso de correntes muito baixas conduz a tempos de carga muito
elevados.
Tensão constante - Neste caso é a tensão de carga que é mantida constante ao
longo do processo, enquanto que a corrente varia. No início do processo de carga a
corrente é muito elevada e vai diminuindo para valores muito baixos na finalização do
processo. Isto conduz a que a finalização da carga seja muito lenta, pois quanto mais
energia a bateria absorve, maior é a sua tensão e, sendo assim, menor é a corrente.
Corrente constante - Tensão constante - Este método é um híbrido dos dois
anteriores. Numa primeira fase a bateria é carregada a corrente constante até atingir

9
um valor limite de tensão. Na segunda fase é imposto um valor de tensão fixa até a
corrente atingir um certo valor que ronda o 1% da capacidade nominal da bateria. Na
terceira, e última, fase aplica-se de novo uma tensão de constante, mas de valor
inferior à da fase anterior, durante um determinado intervalo de tempo, de modo a
estabilizar as reações químicas da bateria. Esta hipótese constitui uma solução
segura e relativamente rápida.
Existem outros processos de carga que variam no seu princípio de funcionamento, na
simplicidade da sua implementação e na sua eficácia. Qualquer que seja o método de carga
escolhido, este deve sempre ter em consideração o tipo de bateria em que será aplicado, devido às
suas diferentes características
2.2. Modelo Utilizado
O modelo utilizado para representar a bateria é o existente no Simulink, Matlab. Este modelo
baseia-se no circuito equivalente da Figura 2.5.
Figura 2.5 – Circuito equivalente da bateria fornecida pela biblioteca SimPowerSystems
Este circuito implementa um modelo genérico, através do qual é possível representar os tipos
de baterias recarregáveis mais comuns, mediante a escolha dos seus parâmetros. Esses parâmetros
podem ser obtidos a partir da curva característica de descarga da bateria.
É apresentada na Figura 2.6 uma curva de descarga típica, na qual se pode observar as suas
três zonas.

10
Figura 2.6 – Curva de descarga típica de uma bateria
A primeira zona do gráfico representa a queda de tensão exponencial quando a bateria está
carregada. O tamanho desta zona depende do tipo de bateria. A segunda zona, representa a carga
que a bateria consegue fornecer até a tensão cair abaixo do seu valor nominal. Por fim, a terceira
zona representa a descarga total da bateria, onde se verifica uma queda muito rápida da tensão.
Quando a corrente da bateria é negativa, ela irá recarregar de acordo com uma curva
característica como a da Figura 2.7.
Figura 2.7 – Curva de carga típica de uma bateria
O estado de carga da bateria é calculado, pelo modelo, de acordo com a seguinte expressão:
𝑆𝑂𝐶 % = 100 1 − 𝑖 𝑡 𝑑𝑡
𝑡
0
𝑄𝐵
Nesta equação, QB representa a carga máxima da bateria e i(t) a corrente da bateria.
De notar que, neste modelo, os parâmetros são obtidos a partir da curva de descarga e
assume-se que são os mesmos para o processo de carga; que a resistência interna é constante
durante a carga e descarga, e não varia com a amplitude da corrente; que a capacidade da bateria
não varia com a amplitude da corrente; que não se considera a existência de auto-descarga; e que a
temperatura não influencia, nem os parâmetros, nem o processo de carga e descarga.
(2.1)

11
2.3. Características Técnicas
Pretende-se que o Sistema de Armazenamento de Energia consiga fornecer uma tensão da
ordem dos 400 𝑉 e tenha uma capacidade para fornecer uma potência de 𝑃 = 500 𝑘𝑊 durante cerca
de 30 𝑚𝑖𝑛.
As baterias utilizadas são baterias do tipo Chumbo-Ácido com as características presentes na
Tabela 2.1.
Tabela 2.1 – Especificações da bateria
Especificações da bateria
Dimensões 330 x 172 x 240mm
Peso 27.1kg
Tensão Nominal 10.8V
Capacidade Nominal 48Ah
Capacidade Máxima 50.67Ah
Tensão Final de Carga 13V
Tensão Mínima de Descarga 10.5V
Corrente de Descarga Nominal 95A
Resistência Interna 864μΩ
Capacidade extraída até à Tensão Nominal 38Ah
Tensão no fim da zona exponencial 11.5V
Capacidade no fim da zona exponencial 4.75Ah
Para satisfazer os requisitos do Sistema de Armazenamento de energia terão que ser feitas
associações em série e paralelo das baterias com as especificações da Tabela 2.1.
Sendo assim e, analisando a Tabela 2.1, obtém-se:
𝑁𝐵𝑎𝑡 _𝑠𝑒𝑟 =400
11,5= 34,7826
Como o número de baterias em série tem que ser um valor inteiro considerou-se:
𝑁𝐵𝑎𝑡 _𝑠𝑒𝑟 = 35
pelo que se obtém um valor para a tensão do SAE de:
𝑉𝐵𝑎𝑡 = 𝑁𝐵𝑎𝑡 _𝑠𝑒𝑟 × 11,5 = 402,5 𝑉
(2.2)
(2.3)
(2.4)

12
Sabendo a tensão do SAE e a corrente de descarga nominal 𝐼𝑑𝑒𝑠 _𝑛𝑜𝑚 , pode-se determinar o
número de associações em paralelo necessárias para fornecer a potência pretendida, obtendo:
𝑁𝐵𝑎𝑡 _𝑝𝑎𝑟 =
𝑃
𝑉𝐵𝑎𝑡
𝐼𝑑𝑒𝑠 _𝑛𝑜𝑚
= 13,0758
Seguindo o mesmo raciocínio usado anteriormente para as baterias em série, tem-se o
número mínimo de baterias em paralelo:
𝑁𝐵𝑎𝑡 _𝑝𝑎𝑟 𝑚 í𝑛= 14
Este número mínimo de baterias em paralelo garante que o SAE atinja um valor para o seu
estado de carga de 0%, ao fim dos 30 𝑚𝑖𝑛. No entanto, por razões de segurança e para aumentar o
tempo médio de vida do SAE, não se deve deixá-lo descarregar completamente. Sendo assim
definiu-se que 20% seria o valor mínimo aceitável do 𝑆𝑂𝐶. Para garantir que o SAE atinja um 𝑆𝑂𝐶 de
20%, ao fim dos 30 𝑚𝑖𝑛, decidiu-se aumentar o número de baterias em paralelo, pelo que:
𝑁𝐵𝑎𝑡 _𝑝𝑎𝑟 = 16
Estando o SAE dimensionado pode-se simular o seu comportamento, Figuras 2.8, 2.9 e 2.10.
De notar que a capacidade da bateria foi alterada, para que descarregasse no tempo adequado para
as simulações de computador. Por isso, nas Figuras 2.8, 2.9 e 2.10, no eixo do tempo cada 0,1
segundos corresponde a 10 minutos.
Figura 2.8 - Curva de descarga do SAE
(2.5)
(2.6)
(2.7)

13
Figura 2.9 - Corrente fornecida pelo SAE
Figura 2.10 - State Of Charge (SOC) do SAE
Como é possível visualizar nas Figuras 2.8, 2.9 e 2.10 o Sistema de Armazenamento
dimensionado atinge o valor limite de 𝟐𝟎% do 𝑺𝑶𝑪 ao fim de cerca de 31 minutos, além de que os
valores de tensão e corrente estão de acordo com os requisitos.

14
3. Sistemas de Conversão
O sistema global de conversão proposto consiste na interligação de um sistema de conversão
DC/DC com um DC/AC [Vazquez, et al, 2010].
O sistema DC/DC consiste num conversor elevador (boost converter), cuja entrada é o
Sistema de Armazenamento de Energia, e que se irá ligar ao conversor DC/AC que faz a interligação
à rede elétrica.
Em relação ao conversor DC/AC, este é constituído por dois inversores trifásicos ligados em
paralelo, para diminuir a taxa de distorção harmónica da corrente de saída do conversor, cada um
com o seu filtro indutivo. Este sistema ainda engloba um filtro capacitivo, ligado em estrela, antes da
sua ligação à rede.
Na Figura 3.1 é possível visualizar uma representação do sistema global de conversão, na
qual se conseguem distinguir os dois conversores utilizados.
Figura 3.1 - Representação do Sistema Global de Conversão
De notar que, apesar de se referir às entradas e saídas dos conversores tendo em conta um
sentido de trânsito de energia na direção da rede, este sistema é bidirecional, pelo que a definição
das entradas e saídas é meramente indicativa.

15
Ao longo deste capítulo iremos tratar dos dois conversores utilizados, individualmente,
especificando detalhadamente os seus processos de comando, bem como o dimensionamento dos
componentes de filtragem.
3.1. Sistema de Conversão DC/AC
Os inversores trifásicos, Figura 3.2, são constituídos por três braços. Os semicondutores
usados serão transístores IGBT (Insulated Gate Bipolar Transistors) em paralelo com díodos, de
forma a garantir a bidirecionalidade em corrente dos interruptores.
Para prevenir curto-circuitos, os dois interruptores do mesmo braço devem-se encontrar em
estados complementares. Sendo assim, para o mesmo braço k (k = A, B, C), pode ser criada uma
função 𝛾𝑘 definida por:
𝛾𝑘= 1 → 𝑆1𝑘 𝑐𝑜𝑛𝑑𝑢𝑧 𝑒 𝑆2𝑘 𝑐𝑜𝑟𝑡𝑒0 → 𝑆1𝑘 𝑐𝑜𝑟𝑡𝑒 𝑒 𝑆2𝑘 𝑐𝑜𝑛𝑑𝑢𝑧
As tensões 𝑉𝑘 (k = A, B, C) são expressas em função de 𝛾𝑘 :
𝑉𝑘 = 𝛾𝑘𝑈𝑑𝑐
Figura 3.2 - Inversor Trifásico
As tensões compostas são:
𝑉𝐴𝐵 = 𝑉𝐴 − 𝑉𝐵 = 𝛾𝐴 − 𝛾𝐵 𝑈𝑑𝑐 = 𝑉𝐴𝑁 − 𝑉𝐵𝑁
𝑉𝐵𝐶 = 𝑉𝐵 − 𝑉𝐶 = 𝛾𝐵 − 𝛾𝐶 𝑈𝑑𝑐 = 𝑉𝐵𝑁 − 𝑉𝐶𝑁
𝑉𝐶𝐴 = 𝑉𝐶 − 𝑉𝐴 = 𝛾𝐶 − 𝛾𝐴 𝑈𝑑𝑐 = 𝑉𝐶𝑁 − 𝑉𝐴𝑁
(3.2)
(3.3)
(3.1)

16
As tensões simples 𝑉𝑘𝑁 devem verificar a relação:
𝑉𝐴𝑁 + 𝑉𝐵𝑁 + 𝑉𝐶𝑁 = 0
Usando (3.3) e (3.4) obtém-se:
𝑉𝐴𝑁 = 𝑉𝐴𝐵 + 𝑉𝐵𝑁
𝑉𝐵𝑁 = 𝑉𝐵𝐶 + 𝑉𝐶𝑁
𝑉𝐶𝑁 = −𝑉𝐴𝑁 − 𝑉𝐵𝑁
Subtraindo a 3ª equação de (3.5) da 2ª, resolvendo em ordem a 𝑉𝐵𝑁 , substituindo na 1ª, e
usando (3.3) obtém-se 𝑉𝐴𝑁 , e analogamente 𝑉𝐵𝑁 e 𝑉𝐶𝑁, em função de 𝛾𝑘 :
𝑉𝐴𝑁 = 2𝛾𝐴 − 𝛾𝐵 − 𝛾𝐶 𝑈𝑑𝑐
3
𝑉𝐵𝑁 = 2𝛾𝐵 − 𝛾𝐶 − 𝛾𝐴 𝑈𝑑𝑐
3
𝑉𝐶𝑁 = 2𝛾𝐶 − 𝛾𝐴 − 𝛾𝐵 𝑈𝑑𝑐
3
Dependendo dos valores das funções 𝛾𝑘 , as tensões de saída do conversor apenas podem
assumir oito estados 23 possíveis, Figura 3.3, de entre as 26 combinações existentes, devido às
restrições topológicas.
Figura 3.3 - Estados possíveis dos dispositivos semicondutores no inversor trifásico
Estes podem ser representados por vetores de tensão, com componentes 𝑉𝐴, 𝑉𝐵 e 𝑉𝐶 num
referencial ABC a 120º, Tabela 3.1.
(3.4)
(3.5)
(3.6)

17
Tabela 3.1 - Estados possíveis de ligação dos semicondutores no inversor trifásico e tensões resultantes
Vetor 𝛾𝐴 𝛾𝐵 𝛾𝐶 𝑉𝐴𝑁 𝑉𝐵𝑁 𝑉𝐶𝑁
V0 0 0 0 0 0 0
V1 1 0 0 2𝑈𝑑𝑐
3 −
𝑈𝑑𝑐
3 −
𝑈𝑑𝑐
3
V2 1 1 0 𝑈𝑑𝑐
3 −
𝑈𝑑𝑐
3 −
2𝑈𝑑𝑐
3
V3 0 1 0 −𝑈𝑑𝑐
3
2𝑈𝑑𝑐
3 −
𝑈𝑑𝑐
3
V4 0 1 1 −2𝑈𝑑𝑐
3
𝑈𝑑𝑐
3
𝑈𝑑𝑐
3
V5 0 0 1 −𝑈𝑑𝑐
3 −
𝑈𝑑𝑐
3
2𝑈𝑑𝑐
3
V6 1 0 1 𝑈𝑑𝑐
3 −
2𝑈𝑑𝑐
3
𝑈𝑑𝑐
3
V7 1 1 1 0 0 0
3.1.1. Comando dos Inversores
Para definir 𝛾𝑘 são possíveis vários tipos de comando:
O comando de plena onda, no qual os dispositivos semicondutores de cada braço
S1k e S2k são comandados de modo complementar com fator de ciclo 𝛿𝑖𝑛𝑣 =1
2, à
frequência fundamental 𝑓 =1
𝑇𝑓=
𝜔
2𝜋 , com um desfasamento de 120º entre cada
braço;
O comando por modulação sinusoidal de largura de impulso (Sinusoidal Wave
Pulse WidthModulation - SPWM);
O comando por modulação de vetores espaciais, ou modulação vetorial (Space
Vector Modulation - SVM);
O controlo vetorial não linear das correntes trifásicas.
Para o sistema em questão, utilizou-se o comando por modulação sinusoidal de largura de
impulso, SPWM, de forma a se obter tensões alternadas com menor conteúdo harmónico. Neste tipo
de modulação são usadas três modulantes sinusoidais, cos 𝜔𝑡 , desfasadas de 120º entre si, de
frequência fundamental 𝜔 = 2𝜋𝑓, em que 𝑓 = 50 𝐻𝑧 , e com amplitude definida pelo índice de
modulação 𝑚𝑖 𝑚𝑖 ∈ 0, 1 , que modula uma portadora triangular 𝑟 𝑡 , Figura 3.4.
O modulador SPWM gera a variável 𝛾𝑘 , Figura 3.4, que comanda o braço k do inversor:
𝛾𝑘 = 1 → 𝑠𝑒 𝑚𝑖 cos 𝜔𝑡 > 𝑟 𝑡
0 → 𝑠𝑒 𝑚𝑖 cos 𝜔𝑡 < 𝑟 𝑡 (3.7)

18
Figura 3.4 - Modulador SPWM, portadora, modulante e sinal 𝜸 de cada um dos dispositivos semicondutores
A frequência da portadora triangular 𝑟 𝑡 deve ser um múltiplo impar do triplo da frequência
da modulante, ou seja deve ter um índice de pulsação 𝑝 = 3 2𝑛 − 1 , 𝑛 ∈ 𝑁 , para garantir simetria
de meia onda e de quarto de onda, minimizando o conteúdo harmónico.
Neste caso, usou-se 𝑛 = 15, ou seja um índice de pulsação 𝑝 = 87, obtendo-se uma
frequência para a portadora 𝑓𝑝 = 4350 𝐻𝑧.
No sistema usado, temos dois inversores em paralelo, com o objetivo de reduzir a taxa de
distorção harmónica da corrente à saída do conversor DC/AC. Isto conseguiu-se desfasando as
portadoras triangulares dos moduladores dos dois inversores de 180º.

19
3.1.2. Dimensionamento das Bobines e Condensadores
A determinação do coeficiente de auto-indução da bobine 𝐿 num inversor é feita, calculando o
valor necessário para limitar o tremor da corrente, ∆𝑖𝐿, e que depende da tensão no andar DC, Udc, e
do período de comutação, 𝑇𝐶 , [Silva, 2013]:
𝐿 =𝑈𝑑𝑐𝑇𝐶
6∆𝑖𝐿
Como a tensão do lado contínuo tem que ser maior que o valor de pico da tensão composta,
definiu-se 𝑈𝑑𝑐 = 800𝑉, o que satisfaz a condição:
𝑈𝑑𝑐 = 800𝑉 ≥ 6 × 230 = 563,4 𝑉
Considerou-se que o tremor da corrente na bobine deveria ser de 7,5%. Como a potência do
sistema é 𝑆 = 500𝑘𝑉𝐴 e temos dois inversores trifásicos em paralelo, a corrente máxima que passa
em cada bobine será:
𝐼𝐿𝑒𝑓=
𝑆
2 × 3 × 230= 362,32 𝐴
Sendo assim, obtém-se:
∆𝑖𝐿 = 0,075 × 2 × 𝐼𝐿𝑒𝑓= 38,43 𝐴
Substituindo 𝑇𝐶 = 1 𝑓𝑝 , 𝑈𝑑𝑐 e ∆𝑖𝐿 em (3.8) obtém-se:
𝐿 = 797,59 𝜇𝐻
Também se deve contabilizar as perdas na bobine, por isso considerou-se a existência de
uma resistência 𝑟𝐿 de perdas em série com a bobine. A potência de perdas 𝑃𝑟𝐿 nessa resistência é
dada pela expressão:
𝑃𝑟𝐿 = 𝑟𝐿𝐼𝐿𝑒𝑓
2
Considerando fator de potência unitário e uma potência de perdas na resistência de 1% da
potência total:
𝑃𝑟𝐿 = 0,01𝑃 = 0,01𝑆
(3.8)
(3.9)
(3.10)
(3.11)
(3.12)
(3.13)
(3.14)
20
podemos determinar 𝑟𝐿, substituindo (3.10) e (3.14) em (3.13):
𝑟𝐿 =0,01𝑆
𝐼𝐿𝑒𝑓
2 = 38,1 𝑚Ω
Os condensadores 𝐶 são dimensionados tendo em conta a potência reativa, fornecida pelos
mesmos, à frequência fundamental [Wang, et al, 2003]. Para este caso definiu-se a potência reativa 𝑄
como uma percentagem da potência do sistema 𝑆. A percentagem escolhida foi de 5%:
𝑄 = 0,05𝑆
Sendo assim, obtém-se:
𝐶 =0,05𝑆
3 × 2𝜋𝑓 × 2 × 230 2 = 250,7 𝜇𝐹
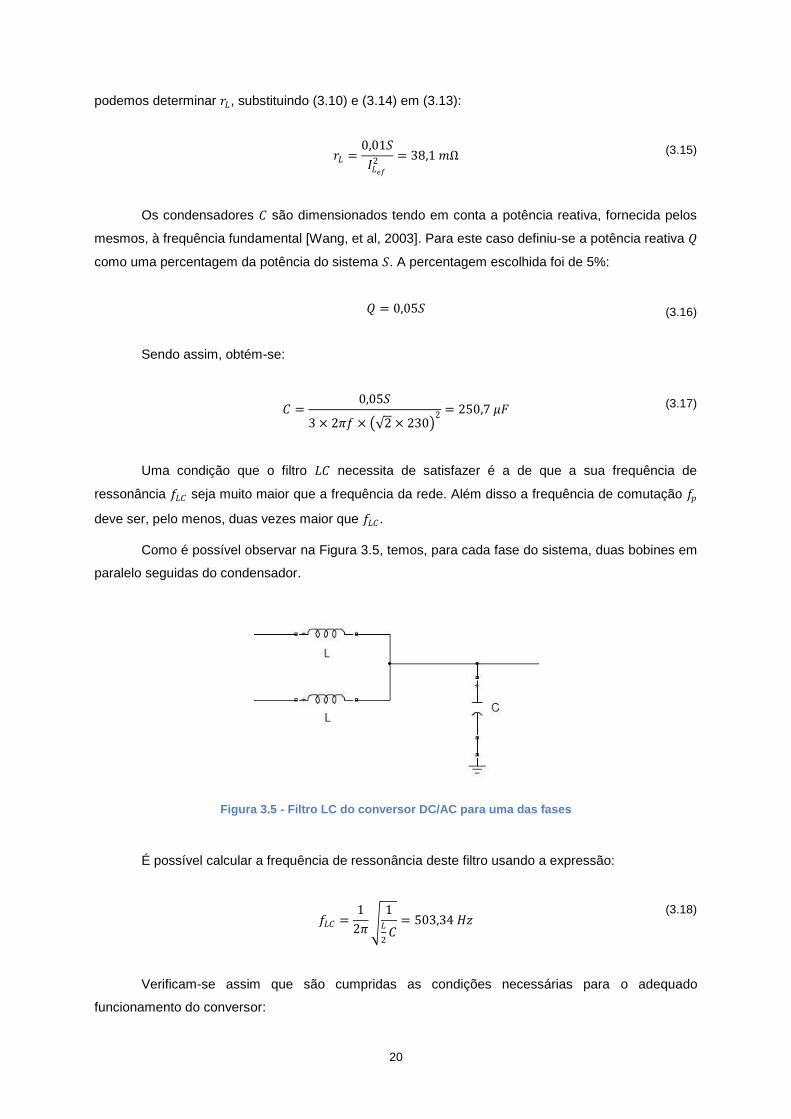
Uma condição que o filtro 𝐿𝐶 necessita de satisfazer é a de que a sua frequência de
ressonância 𝑓𝐿𝐶 seja muito maior que a frequência da rede. Além disso a frequência de comutação 𝑓𝑝
deve ser, pelo menos, duas vezes maior que 𝑓𝐿𝐶 .
Como é possível observar na Figura 3.5, temos, para cada fase do sistema, duas bobines em
paralelo seguidas do condensador.
Figura 3.5 - Filtro LC do conversor DC/AC para uma das fases
É possível calcular a frequência de ressonância deste filtro usando a expressão:
𝑓𝐿𝐶 =1
2𝜋 1
𝐿
2𝐶
= 503,34 𝐻𝑧
Verificam-se assim que são cumpridas as condições necessárias para o adequado
funcionamento do conversor:
(3.15)
(3.16)
(3.17)
(3.18)
21
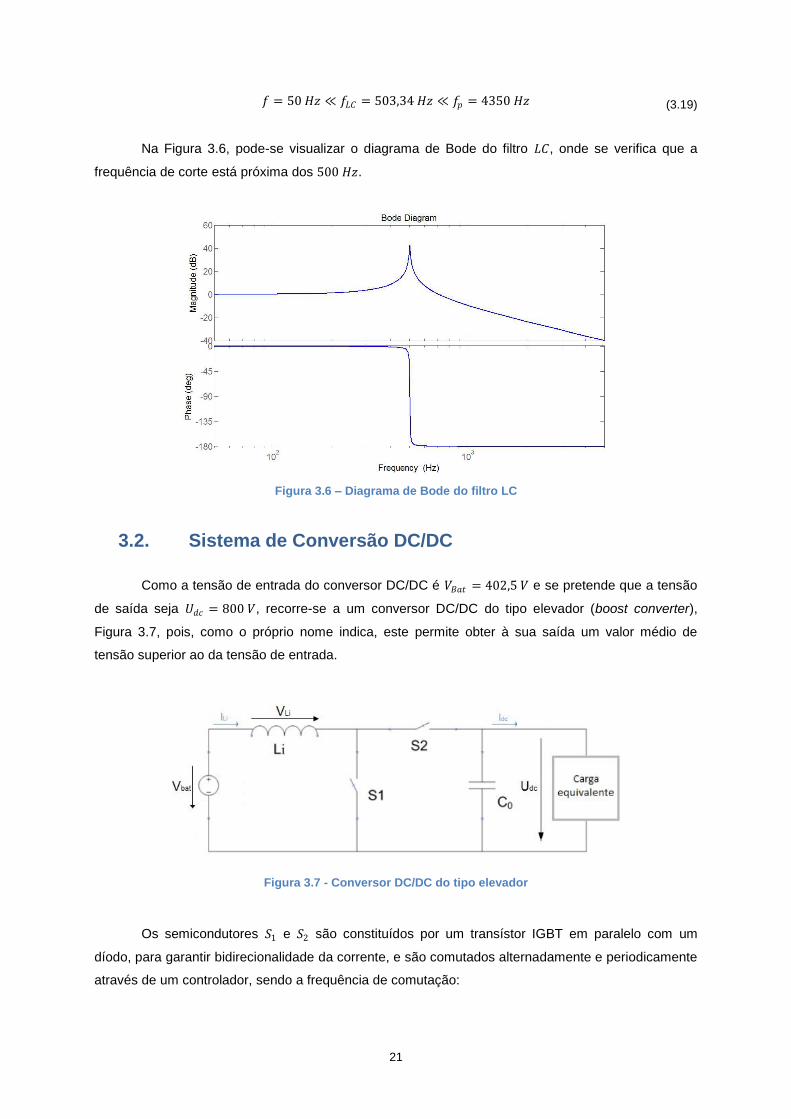
𝑓 = 50 𝐻𝑧 ≪ 𝑓𝐿𝐶 = 503,34 𝐻𝑧 ≪ 𝑓𝑝 = 4350 𝐻𝑧
Na Figura 3.6, pode-se visualizar o diagrama de Bode do filtro 𝐿𝐶, onde se verifica que a
frequência de corte está próxima dos 500 𝐻𝑧.
Figura 3.6 – Diagrama de Bode do filtro LC
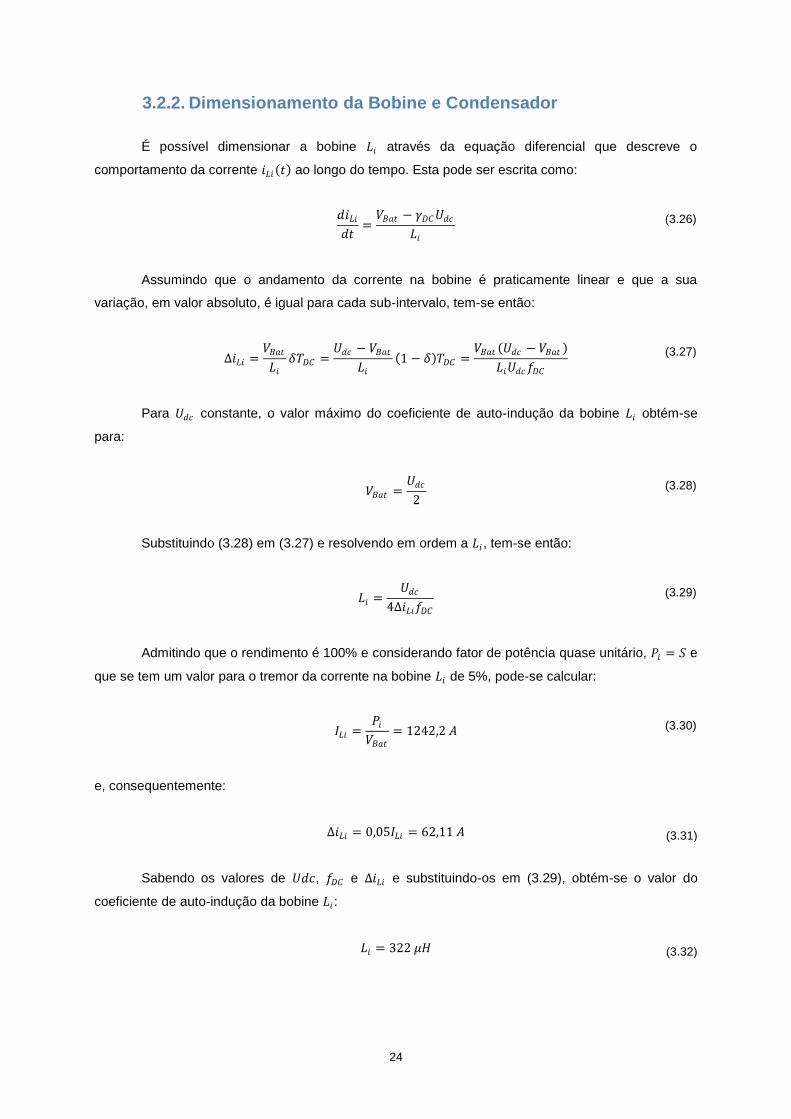
3.2. Sistema de Conversão DC/DC
Como a tensão de entrada do conversor DC/DC é 𝑉𝐵𝑎𝑡 = 402,5 𝑉 e se pretende que a tensão
de saída seja 𝑈𝑑𝑐 = 800 𝑉, recorre-se a um conversor DC/DC do tipo elevador (boost converter),
Figura 3.7, pois, como o próprio nome indica, este permite obter à sua saída um valor médio de
tensão superior ao da tensão de entrada.
Figura 3.7 - Conversor DC/DC do tipo elevador
Os semicondutores 𝑆1 e 𝑆2 são constituídos por um transístor IGBT em paralelo com um
díodo, para garantir bidirecionalidade da corrente, e são comutados alternadamente e periodicamente
através de um controlador, sendo a frequência de comutação:
(3.19)

22
𝑓𝐷𝐶 = 10 𝑘𝐻𝑧
A fração do período de comutação em que o semicondutor 𝑆1 conduz designa-se por fator de
ciclo de comutação, 𝛿.
3.2.1. Comando do Conversor
Em cada período, 𝑇𝐷𝐶 = 1 𝑓𝐷𝐶 , no intervalo 0 < 𝑡 < 𝛿𝑇𝐷𝐶 𝑜𝑢 𝑡𝑜𝑛 , o semicondutor 𝑆1 está em
condução e o semicondutor 𝑆2 está ao corte, transferindo energia de 𝑉𝐵𝑎𝑡 para a bobine 𝐿𝑖 . Durante o
resto do período 𝑡𝑜𝑛 < 𝑡 < 𝑇𝐷𝐶 , de duração 1 − 𝛿 𝑇𝐷𝐶 , o semicondutor 𝑆1 está ao corte, enquanto o
semicondutor 𝑆2 conduz, o que faz com que a energia armazenada, anteriormente, na bobine 𝐿𝑖 seja
transferida para o condensador 𝐶0 e para a carga. Como a energia da fonte é transferida primeiro
para a bobine 𝐿𝑖 e apenas posteriormente para a carga, este conversor também é designado
conversor indireto ou de armazenamento indutivo.
É preciso referir que os semicondutores 𝑆1 e 𝑆2 não podem conduzir simultaneamente, de
modo a evitar um curto-circuito no condensador 𝐶0.
É possível representar estes dois estados de funcionamento por uma variável 𝛾𝐷𝐶 dada por:
𝛾𝐷𝐶 = 0 → 𝑠𝑒 𝑆1 𝑒𝑚 𝑐𝑜𝑛𝑑𝑢çã𝑜 𝑒 𝑆2 𝑎𝑜 𝑐𝑜𝑟𝑡𝑒 0 < 𝑡 < 𝑡𝑜𝑛
1 → 𝑠𝑒 𝑆1 𝑎𝑜 𝑐𝑜𝑟𝑡𝑒 𝑒 𝑆2 𝑒𝑚 𝑐𝑜𝑛𝑑𝑢çã𝑜 𝑡𝑜𝑛 < 𝑡 < 𝑇𝐷𝐶
Quando 𝛾𝐷𝐶 = 0, Figura 3.8, a corrente da fonte percorre a bobine 𝐿𝑖 para que esta armazene
energia. Por outro lado o condensador 𝐶0 descarrega para a carga. Neste caso:
𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡
Figura 3.8 - Conversor DC/DC elevador no modo 𝜸𝑫𝑪 = 𝟎
Quando 𝛾𝐷𝐶 = 1, Figura 3.9, a corrente na bobine 𝐿𝑖 decresce, pois a tensão 𝑉𝐿𝑖 é negativa, o
que leva a que a energia armazenada na bobine seja transferida para o condensador 𝐶0 e para a
carga. Nesta situação:
(3.20)
(3.21)
(3.22)

23
𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡 − 𝑈𝑑𝑐
Figura 3.9 - Conversor DC/DC elevador no modo 𝜸𝑫𝑪 = 𝟏
Pode-se obter então a evolução da tensão aos terminais da bobine 𝑉𝐿𝑖 em função de 𝛾𝐷𝐶 :
𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡 , 𝑠𝑒 𝛾𝐷𝐶 = 0 0 < 𝑡 < 𝑡𝑜𝑛
𝑉𝐵𝑎𝑡 − 𝑈𝑑𝑐 , 𝑠𝑒 𝛾𝐷𝐶 = 1 𝑡𝑜𝑛 < 𝑡 < 𝑇𝐷𝐶
Sabendo que, em regime permanente, o valor médio da tensão aos terminais da bobine é
nulo, pode-se determinar o fator de ciclo de comutação do conversor 𝛿:
𝑉𝐿𝑖𝑎𝑣=
1
𝑇𝐷𝐶
𝑉𝐵𝑎𝑡 𝑑𝑡𝛿𝑇𝐷𝑐
0
+ 𝑉𝐵𝑎𝑡 − 𝑈𝑑𝑐 𝑑𝑡𝑇𝐷𝐶
𝛿𝑇𝐷𝐶
= 0 𝑈𝑑𝑐
𝑉𝐵𝑎𝑡
=1
1 − 𝛿 𝛿 = 1 −
𝑉𝐵𝑎𝑡
𝑈𝑑𝑐
Na Figura 3.10 podemos observar as formas de onda ideais da comutação de 𝑆1 (em cima);
das tensões na bobine 𝑉𝐿𝑖 , a vermelho, e na saída 𝑈𝑑𝑐 , a azul, (ao meio); e das correntes no
semicondutor 𝑆1, 𝐼𝑆1, a vermelho, no semicondutor 𝑆2, 𝐼𝑆2, a azul, e na bobine, 𝐼𝐿𝑖 , a preto, (em baixo).
Figura 3.10 - Formas de onda ideais no conversor DC/DC elevador
(3.23)
(3.24)
(3.25)
24
3.2.2. Dimensionamento da Bobine e Condensador
É possível dimensionar a bobine 𝐿𝑖 através da equação diferencial que descreve o
comportamento da corrente 𝑖𝐿𝑖 𝑡 ao longo do tempo. Esta pode ser escrita como:
𝑑𝑖𝐿𝑖
𝑑𝑡=
𝑉𝐵𝑎𝑡 − 𝛾𝐷𝐶𝑈𝑑𝑐
𝐿𝑖
Assumindo que o andamento da corrente na bobine é praticamente linear e que a sua
variação, em valor absoluto, é igual para cada sub-intervalo, tem-se então:
∆𝑖𝐿𝑖 =𝑉𝐵𝑎𝑡
𝐿𝑖
𝛿𝑇𝐷𝐶 =𝑈𝑑𝑐 − 𝑉𝐵𝑎𝑡
𝐿𝑖
1 − 𝛿 𝑇𝐷𝐶 =𝑉𝐵𝑎𝑡 𝑈𝑑𝑐 − 𝑉𝐵𝑎𝑡
𝐿𝑖𝑈𝑑𝑐𝑓𝐷𝐶
Para 𝑈𝑑𝑐 constante, o valor máximo do coeficiente de auto-indução da bobine 𝐿𝑖 obtém-se
para:
𝑉𝐵𝑎𝑡 =𝑈𝑑𝑐
2
Substituindo (3.28) em (3.27) e resolvendo em ordem a 𝐿𝑖 , tem-se então:
𝐿𝑖 =𝑈𝑑𝑐
4∆𝑖𝐿𝑖𝑓𝐷𝐶
Admitindo que o rendimento é 100% e considerando fator de potência quase unitário, 𝑃𝑖 = 𝑆 e
que se tem um valor para o tremor da corrente na bobine 𝐿𝑖 de 5%, pode-se calcular:
𝐼𝐿𝑖 =𝑃𝑖
𝑉𝐵𝑎𝑡
= 1242,2 𝐴
e, consequentemente:
∆𝑖𝐿𝑖 = 0,05𝐼𝐿𝑖 = 62,11 𝐴
Sabendo os valores de 𝑈𝑑𝑐, 𝑓𝐷𝐶 e ∆𝑖𝐿𝑖 e substituindo-os em (3.29), obtém-se o valor do
coeficiente de auto-indução da bobine 𝐿𝑖 :
𝐿𝑖 = 322 𝜇𝐻
(3.26)
(3.27)
(3.28)
(3.29)
(3.30)
(3.31)
(3.32)

25
Para dimensionar o valor do condensador 𝐶0, calculou-se a capacidade necessária para que
o condensador, recebendo uma potência 𝑃0 durante um período ∆𝑡, tenha uma variação na tensão
entre 𝑈𝑑𝑐 𝑚𝑖𝑛 e 𝑈𝑑𝑐 𝑚á𝑥
, dada por (3.33):
𝐶0 =2𝑃0∆𝑡
𝑈𝑑𝑐 𝑚á𝑥2 − 𝑈𝑑𝑐 𝑚𝑖𝑛
2
Assumindo que 𝑃0 = 𝑆, que ∆𝑡 = 1 10 𝑠 e admitindo que:
𝑈𝑑𝑐 𝑚á𝑥= 900 𝑉 𝑈𝑑𝑐 𝑚𝑖𝑛
= 700 𝑉
obtém-se:
𝐶0 = 312,5 𝑚𝐹
(3.33)
(3.34)
(3.35)

26
4. Controladores
Neste capítulo serão dimensionados, de forma detalhada, os vários controladores utilizados
no sistema. Em primeiro lugar será feito o dimensionamento dos controladores do lado AC,
nomeadamente o controlo das correntes e o controlo de tensão supondo controlo interno de corrente.
Posteriormente será apresentado o controlo das correntes à entrada do conversor DC/DC elevador e
o controlo de tensão no andar DC. Em último lugar é construído um supervisor, que irá monitorizar o
sistema global e comandar o comportamento dos vários controladores em função do estado do
sistema.
4.1. Controlo das Correntes AC
Existem várias técnicas para controlar as correntes do inversor. Uma das mais utilizadas
consiste no controlo histerético das correntes num referencial estacionário (referencial 𝛼𝛽) que inclui
um comparador de histerese e que compara as correntes de saída do conversor com as correntes de
referência. No entanto, esta estratégia tem a desvantagem de a frequência de comutação do inversor
ser variável, e de o sistema resultante não ser invariante no tempo.
Para uma implementação digital, o controlo de corrente num referencial girante (referencial
𝑑𝑞) é mais adequado [Silva, et al, 2012].
Para este caso foi dimensionado um controlo de corrente num referencial girante. O principal
objetivo deste tipo de controlo é o de que este tipo de controladores, constituídos por compensadores
𝑃𝐼 (Proporcional-Integral), processa sinais constantes. As saídas do controlador são as tensões de
entrada do modulador SPWM, que gera os sinais de disparo dos semicondutores do inversor. De
notar que existem dois controladores de corrente iguais, um para cada inversor. Apresenta-se na
Figura 4.1 o esquema do sistema de controlo.
Figura 4.1 – Esquema do sistema de controlo de corrente do inversor

27
Como o controlador funciona num referencial 𝑑𝑞, é necessário fazer-se transformação de
variáveis. Para isto utiliza-se a transformação de Clarke, de forma a passar de um referencial 𝑎𝑏𝑐
para um referencial 𝛼𝛽0 , seguida da transformação de Park, passando do referencial 𝛼𝛽 para o
referencial 𝑑𝑞 .
Assumindo que o sistema trifásico é equilibrado e, consequentemente, a componente
homopolar é nula, a transformação de Clarke é dada por:
𝑥𝛼
𝑥𝛽 =
2
3 1 −
1
2−
1
2
0 3
2−
3
2
𝑥𝑎
𝑥𝑏
𝑥𝑐
É possível fazer a conversão do sistema bifásico 𝛼𝛽 para o sistema trifásico 𝑎𝑏𝑐 através da
transformação inversa de Clarke, dada pela equação matricial:
𝑥𝑎
𝑥𝑏
𝑥𝑐
= 2
3
1 0
−1
2
3
2
−1
2−
3
2
𝑥𝛼
𝑥𝛽
A Figura 4.2 ilustra a transformação de Clarke.
Figura 4.2 – Transformação de Clarke
A transformação de Park permite converter o sistema bifásico 𝛼𝛽 num segundo sistema
bifásico 𝑑𝑞, girante e síncrono com a rede. Com esta mudança de referencial, as novas grandezas
em 𝑑𝑞 tomam, em regime permanente, valores contínuos e não sinusoidais, o que simplifica a
representação do sistema.
𝑥𝑑
𝑥𝑞 =
cos 𝜃 sin 𝜃− sin 𝜃 cos 𝜃
𝑥𝛼
𝑥𝛽
(4.1)
(4.2)
(4.3)

28
A transformação inversa de Park faz a conversão do sistema bifásico 𝑑𝑞 para o sistema
bifásico 𝛼𝛽.
𝑥𝛼
𝑥𝛽 =
cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
𝑥𝑑
𝑥𝑞
O referencial 𝑑𝑞 roda com uma velocidade angular 𝜔, e portanto estabelece o ângulo 𝜃 com o
eixo 𝛼. Na Figura 4.3 está representado o referencial girante 𝑑𝑞, onde o eixo 𝑑 representa a
componente direta e o eixo 𝑞 representa a componente em quadratura das grandezas transformadas.
Figura 4.3 – Transformação de Park
O sincronismo com a rede é realizado usando um PLL (Phase-Locked-Loop). Na Figura 4.4
está representado o princípio de funcionamento do PLL.
Figura 4.4 – Princípio de funcionamento do PLL [Teodorescu, et al, 2004]
Os sinais de entrada são:
sin 𝜑 =𝑉𝛽
𝑉𝛼2 + 𝑉𝛽
2
cos 𝜑 =𝑉𝛼
𝑉𝛼2 + 𝑉𝛽
2
(4.4)
(4.5)
29
onde 𝜑 é a fase da rede, e 𝑉𝛼 e 𝑉𝛽 são as componentes 𝛼𝛽 da tensão da rede. O princípio de
funcionamento do PLL é o de que o seno da diferença entre 𝜑 e a fase do inversor 𝜃 pode ser feito
tender para zero, usando um controlador do tipo 𝑃𝐼, pois para argumentos muito pequenos:
sin 𝜑 − 𝜃 ≅ 𝜑 − 𝜃
A saída do controlador 𝑃𝐼 é a frequência de saída do inversor que, em seguida, é integrada,
obtendo-se assim a fase do inversor 𝜃 [Teodorescu, et al, 2004].
Analisando a Figura 4.1, podem-se obter as tensões de saída do inversor:
𝑑𝑖𝑎𝑑𝑡
= −𝑅
𝐿𝑖𝑎 +
𝑢𝑎
𝐿−
𝑒𝑎
𝐿𝑑𝑖𝑏𝑑𝑡
= −𝑅
𝐿𝑖𝑏 +
𝑢𝑏
𝐿−
𝑒𝑏
𝐿𝑑𝑖𝑐𝑑𝑡
= −𝑅
𝐿𝑖𝑐 +
𝑢𝑐
𝐿−
𝑒𝑐
𝐿
Aplicando a transformação de Clarke obtém-se:
𝑑𝑖𝛼𝑑𝑡
= −𝑅
𝐿𝑖𝛼 +
𝑢𝛼
𝐿−
𝑒𝛼
𝐿𝑑𝑖𝛽
𝑑𝑡= −
𝑅
𝐿𝑖𝛽 +
𝑢𝛽
𝐿−
𝑒𝛽
𝐿
Aplicando a transformação de Park obtêm-se
𝑑𝑖𝑑𝑑𝑡
= −𝑅
𝐿𝑖𝑑 + 𝜔𝐿𝑖𝑞 +
𝑢𝑑
𝐿−
𝑒𝑑
𝐿𝑑𝑖𝑞
𝑑𝑡= −
𝑅
𝐿𝑖𝑞 − 𝜔𝐿𝑖𝑑 +
𝑢𝑞
𝐿−
𝑒𝑞
𝐿
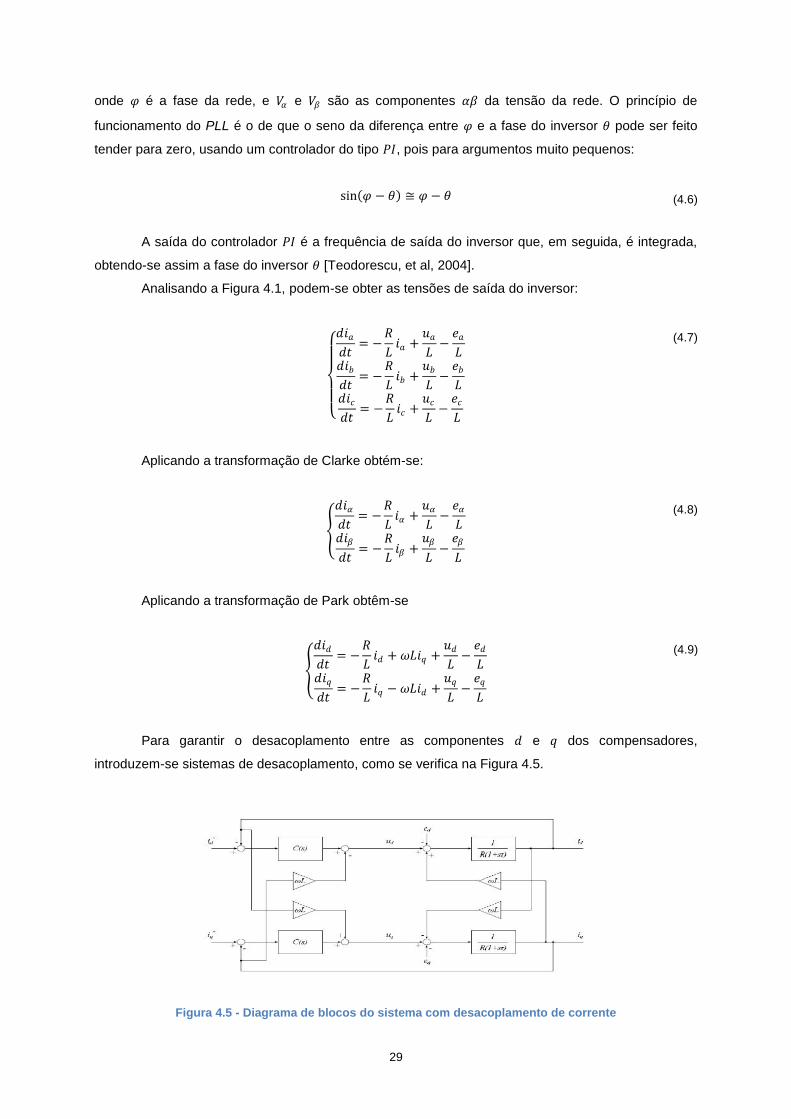
Para garantir o desacoplamento entre as componentes 𝑑 e 𝑞 dos compensadores,
introduzem-se sistemas de desacoplamento, como se verifica na Figura 4.5.
Figura 4.5 - Diagrama de blocos do sistema com desacoplamento de corrente
(4.6)
(4.7)
(4.8)
(4.9)
30
Resolvendo as equações (4.9) em ordem a 𝑖𝑑 e 𝑖𝑞 , tem-se:
𝑖𝑑 =
𝑢𝑑 − 𝑒𝑑 + 𝜔𝐿𝑖𝑞
𝑅 + 𝑠𝐿
𝑖𝑞 =𝑢𝑞 − 𝑒𝑞 − 𝜔𝐿𝑖𝑑
𝑅 + 𝑠𝐿
Usualmente, para efetuar o dimensionamento dos compensadores a associação do
modulador com o inversor pode ser representada como um modelo de primeira ordem [Pinto, et al,
2011a]:
𝐺𝑐 𝑠 ≈𝐾𝐷
𝑠𝑇𝐷 + 1
O ganho 𝐾𝐷 depende da tensão 𝑈𝑑𝑐 e do máximo valor da portadora triangular 𝑢𝑐𝑚 á𝑥,
enquanto que 𝑇𝐷 representa o tempo médio de atraso de resposta do conversor, e é dado
habitualmente por metade do período de comutação, 𝑇𝐶 = 1 𝑓𝑝 , de tal forma que:
𝐾𝐷 =𝑈𝑑𝑐
𝑢𝑐𝑚 á𝑥
𝑇𝐷 =𝑇𝐶
2
De forma a garantir um rápido tempo de resposta e erro estático nulo na resposta ao escalão
são utilizados compensadores do tipo Proporcional-Integral (𝑃𝐼),
𝐶𝑖𝑑𝑞 𝑠 = 𝐾𝑝𝑖 +
𝐾𝑖𝑖
𝑠=
1 + 𝑠𝑇𝑧𝑖
𝑠𝑇𝑝𝑖
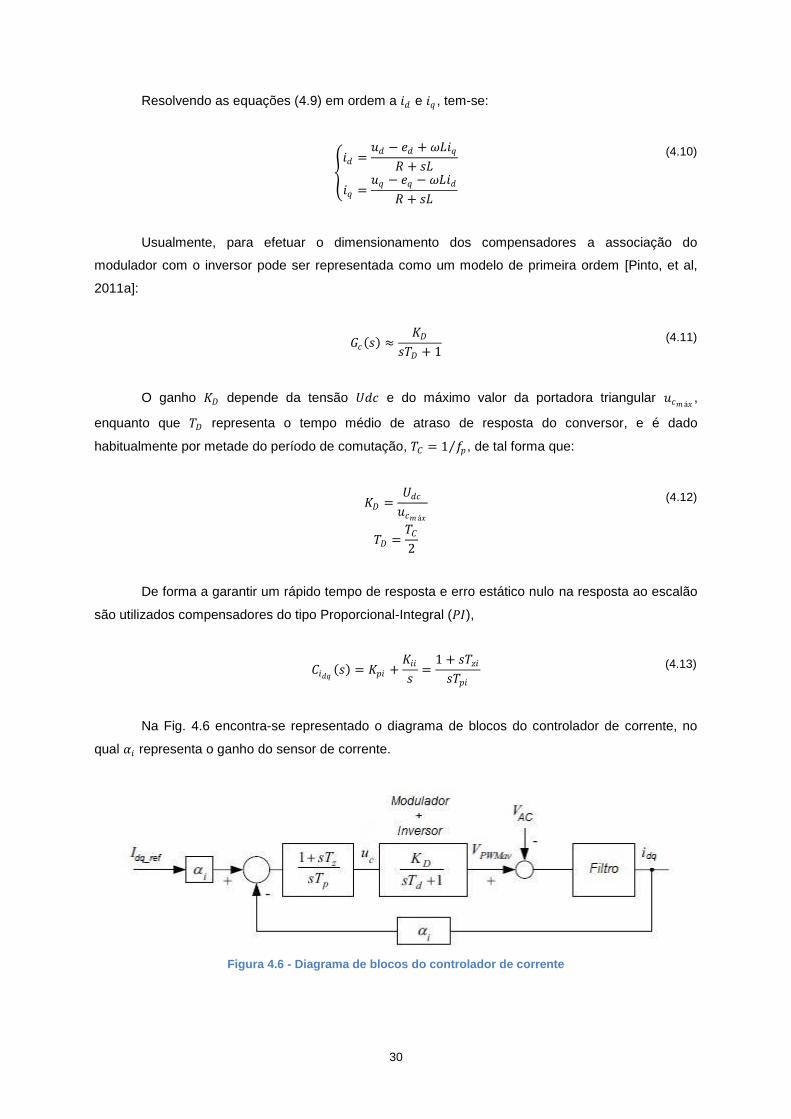
Na Fig. 4.6 encontra-se representado o diagrama de blocos do controlador de corrente, no
qual 𝛼𝑖 representa o ganho do sensor de corrente.
Figura 4.6 - Diagrama de blocos do controlador de corrente
(4.10)
(4.11)
(4.12)
(4.13)
31
Para dimensionar o controlador é necessário obter-se a função de transferência em cadeia
fechada do sistema. Para efeitos de dimensionamento do controlador admite-se que o sistema vê
uma resistência equivalente aos seus terminais dada por:
𝑅0 =𝑉𝑟𝑒𝑑𝑒
2
𝑆
3
Do ponto de vista do controlador, visto que existem dois inversores em paralelo, isto resulta
em:
𝑅 = 𝑅0 +𝑟𝐿2
Fazendo com que o zero do compensador, 𝑇𝑧𝑖 , se cancele com o polo introduzido pelo filtro,
𝑇𝑧𝑖 =𝐿
𝑅
obtém-se a função de transferência de 2ª ordem do controlador de corrente, dada por:
𝐺𝑑 𝑠 =𝑖𝑑𝑞 𝑠
𝑖𝑑𝑞 _𝑟𝑒𝑓 𝑠 =
𝐾𝐷𝛼𝑖
𝑇𝑝𝑖 𝑇𝐷𝑅
𝑠2 +1
𝑇𝐷𝑠 +
𝐾𝐷𝛼𝑖
𝑇𝑝𝑖 𝑇𝐷𝑅
Comparando a função de transferência (4.17) com uma função de transferência de 2ª ordem
escrita na sua forma canónica,
𝐺2 𝑠 =𝜔𝑛
2
𝑠2 + 2𝜉𝜔𝑛 + 𝜔𝑛2
e assumindo um coeficiente de amortecimento 𝜉 = 2 2 , determina-se o valor de 𝑇𝑝𝑖 , dado por:
𝑇𝑝𝑖 =2𝐾𝐷𝛼𝑖𝑇𝐷
𝑅
Finalmente, assumindo que 𝑢𝑐𝑚 á𝑥= 1 e que 𝛼𝑖 = 0,001, pode-se determinar os valores para
os ganhos do compensador 𝑃𝐼:
𝐾𝑝𝑖 =
𝑇𝑧𝑖
𝑇𝑝𝑖
= 4,3369
𝐾𝑖𝑖 =1
𝑇𝑝𝑖
= 1,8294 × 103
(4.14)
(4.15)
(4.16)
(4.17)
(4.18)
(4.19)
(4.20)

32
4.2. Controlo das Tensões AC
O controlador de tensão deve garantir que a tensão na carga, que é também a tensão aos
terminais dos condensadores de filtragem 𝐶, se mantém dentro dos parâmetros impostos pela norma
NP EN 50 160.
A função de transferência da tensão na carga em relação à corrente de carga do
condensador 𝑖𝐶 é dada por:
𝑉𝐶
𝑖𝐶=
1
𝑠𝐶
Para dimensionar o controlador, considera-se que a corrente na carga, 𝐼𝐴𝐶 , é uma
perturbação do sistema e, uma vez que as correntes de saída dos inversores se encontram
controladas, representa-se o conjunto constituído pelos inversores e bobines de filtragem como uma
fonte de corrente 𝐼𝑖𝑛𝑣 (Figura 4.7).
Figura 4.7 - Modelo utilizado no dimensionamento do controlador de tensão AC
Como este controlador de tensão tem controlo interno de corrente, representa-se o
controlador das correntes AC por:
𝐼𝑖𝑛𝑣 𝑠
𝐼𝑑𝑞 _𝑟𝑒𝑓 𝑠 =
𝐺𝑣
𝛼𝑖
𝑇𝑑𝑣𝑠 + 1
onde, para este caso, o ganho 𝐺𝑣 é dado por:
𝐺𝑣 = 1
Da Figura 4.7 e da função de transferência (64), obtém-se o diagrama de blocos do
controlador de tensão, que se encontra representado na Figura 4.8.
(4.21)
(4.22)
(4.23)

33
Figura 4.8 - Diagrama de blocos do controlador de tensão AC com controlo interno de corrente
Da Figura 4.8, é possível obter a resposta da tensão à perturbação introduzida pela corrente
na carga, de tal forma que:
𝑉𝑐 𝑠
𝐼𝐴𝐶 𝑠 𝑉𝑐_𝑟𝑒𝑓 = 0
=
1
𝑠𝐶
1 + 𝛼𝑣 𝐾𝑝𝑣 +𝐾𝑖𝑣
𝑠
𝐺𝑣
𝛼𝑖
1
𝑇𝑑𝑣 𝑠+1
1
𝑠𝐶
Reescrevendo a função de transferência (4.24) na forma canónica tem-se:
𝑉𝑐 𝑠
𝐼𝐴𝐶 𝑠 𝑉𝑐_𝑟𝑒𝑓 = 0
=𝑠
𝛼𝑖
𝑇𝑑𝑣𝐶𝛼𝑖 𝑇𝑑𝑣𝑠 + 1
𝑠3 +1
𝑇𝑑𝑣𝑠2 +
𝛼𝑣𝐺𝑣𝐾𝑝𝑣
𝑇𝑑𝑣𝐶𝛼𝑖𝑠 +
𝛼𝑣𝐺𝑣𝐾𝑖𝑣
𝑇𝑑𝑣𝐶𝛼𝑖
Pelo teorema do valor final, a resposta a uma perturbação em escalão introduzida por 𝐼𝐴𝐶 é
zero, o que significa que, em regime permanente, o controlador 𝑃𝐼 garante a minimização das
perturbações.
lim𝑠→0
𝑉𝑐 𝑠
𝐼𝐴𝐶 𝑠 𝑉𝑐_𝑟𝑒𝑓 = 0
= 0
Para determinar os parâmetros do controlador 𝑃𝐼, é comparado o denominador de (4.25) com
o polinómio de 3ª ordem dado por:
𝑃3 𝑠 = 𝑠3 + 1,75𝜔0𝑠2 + 2,15𝜔0
2𝑠 + 𝜔03
Sendo assim:
1,75𝜔0 =
1
𝑇𝑑𝑣
2,15𝜔02 =
𝛼𝑣𝐺𝑣𝐾𝑝𝑣
𝑇𝑑𝑣𝐶𝛼𝑖
𝜔03 =
𝛼𝑣𝐺𝑣𝐾𝑖𝑣
𝑇𝑑𝑣𝐶𝛼𝑖
(4.24)
(4.25)
(4.26)
(4.27)
(4.28)
34
Resolvendo (4.28), obtêm-se as expressões para o ganho proporcional 𝐾𝑝𝑣 e para o ganho
integral 𝐾𝑖𝑣 :
𝐾𝑝𝑣 =2,15𝐶𝛼𝑖
𝛼𝑣𝐺𝑣𝑇𝑑𝑣 1,75 2
𝐾𝑖𝑣 =𝐶𝛼𝑖
𝛼𝑣𝐺𝑣 1,75 3 𝑇𝑑𝑣 2
Assumindo que:
𝑇𝑑𝑣 =1
2𝑓𝑝𝛼𝑣 = 0,001
consegue-se determinar os valores de 𝐾𝑝𝑣 e 𝐾𝑖𝑣 :
𝐾𝑝𝑣 = 1,5313
𝐾𝑖𝑣 = 3,5409 × 103
Uma vez que são necessários dois controladores de corrente, um para cada inversor, e
apenas um controlador de tensão, a corrente de referência gerada pelo controlador de tensão 𝐼𝑑𝑞 _𝑟𝑒𝑓
irá ser dividida por dois. Num caso geral com 𝑛 inversores em paralelo, esta referência de corrente
deveria ser dividida por 𝑛, de forma a, assim ser obtida a referência de corrente para cada inversor
individualmente.
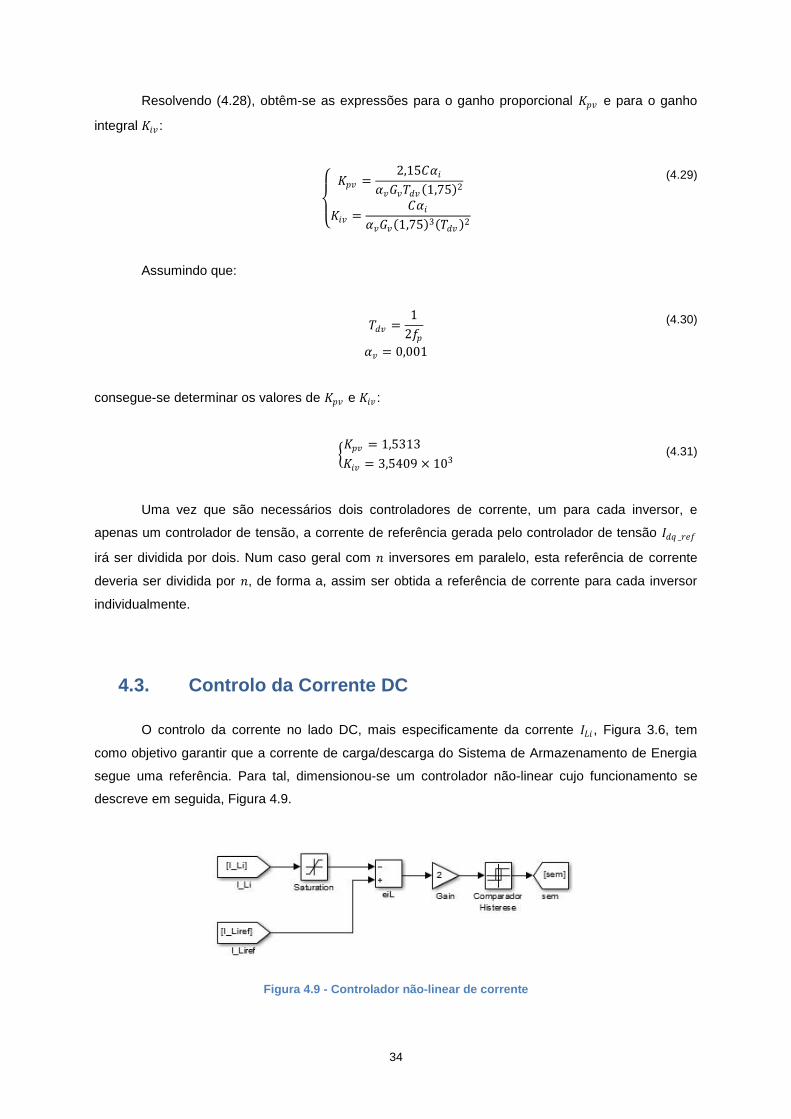
4.3. Controlo da Corrente DC
O controlo da corrente no lado DC, mais especificamente da corrente 𝐼𝐿𝑖 , Figura 3.6, tem
como objetivo garantir que a corrente de carga/descarga do Sistema de Armazenamento de Energia
segue uma referência. Para tal, dimensionou-se um controlador não-linear cujo funcionamento se
descreve em seguida, Figura 4.9.
Figura 4.9 - Controlador não-linear de corrente
(4.29)
(4.30)
(4.31)

35
A tensão aos terminais da bobine 𝐿𝑖 pode ser escrita em função de 𝛾𝐷𝐶 , de tal forma que:
𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡 − 𝛾𝐷𝐶𝑈𝑑𝑐
A partir da equação (4.32) pode-se escrever a equação da dinâmica da corrente 𝐼𝐿𝑖 :
𝐿𝑖
𝑑𝑖𝐿𝑖
𝑑𝑡= 𝑉𝐵𝑎𝑡 − 𝛾𝐷𝐶𝑈𝑑𝑐
Definindo o objetivo de controlo por:
𝐼𝐿𝑖 = 𝐼𝐿𝑖_𝑟𝑒𝑓
o erro será dado por:
𝑒𝑖𝐿𝑖= 𝐼𝐿𝑖_𝑟𝑒𝑓 − 𝐼𝐿𝑖
Existindo apenas duas ações de comando distintas, o controlo pode realizar-se analisando se
o erro 𝑒𝑖𝐿𝑖 é positivo ou negativo. Dado que o sistema é comutado a frequência finita, em valores
instantâneos, o erro 𝑒𝑖𝐿𝑖 não será nulo, e a corrente 𝐼𝐿𝑖 terá uma componente de tremor associada.
Considerando um valor de 휀 para esse tremor, de tal forma que o erro apenas pode variar no intervalo
−휀 < 𝑒𝑖𝐿𝑖< +휀, pode deduzir-se a ação de comando por:
Se 𝑒𝑖𝐿𝑖> 휀 𝐼𝐿𝑖_𝑟𝑒𝑓 > 𝐼𝐿𝑖 𝐼𝐿𝑖 𝑡𝑒𝑚 𝑑𝑒 𝑎𝑢𝑚𝑒𝑛𝑡𝑎𝑟
𝑑𝑖𝐿𝑖
𝑑𝑡> 0 𝛾𝐷𝐶 = 0
Se 𝑒𝑖𝐿𝑖< −휀 𝐼𝐿𝑖_𝑟𝑒𝑓 < 𝐼𝐿𝑖 𝐼𝐿𝑖 𝑡𝑒𝑚 𝑑𝑒 𝑑𝑖𝑚𝑖𝑛𝑢𝑖𝑟
𝑑𝑖𝐿𝑖
𝑑𝑡< 0 𝛾𝐷𝐶 = 1
Tomando estas ações de comando o sistema comporta-se da seguinte forma:
Se 𝛾𝐷𝐶 = 0 𝑆1 𝑂𝑁 𝑒 𝑆2 𝑂𝐹𝐹 𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡 > 0 𝑑𝑖𝐿𝑖
𝑑𝑡> 0 𝐼𝐿𝑖 ↑ (𝑎𝑢𝑚𝑒𝑛𝑡𝑎)
Se 𝛾𝐷𝐶 = 1 𝑆1 𝑂𝐹𝐹 𝑒 𝑆2 𝑂𝑁 𝑉𝐿𝑖 = 𝑉𝐵𝑎𝑡 − 𝑈𝑑𝑐 < 0 𝑑𝑖𝐿𝑖
𝑑𝑡< 0 𝐼𝐿𝑖 ↓ (𝑑𝑖𝑚𝑖𝑛𝑢𝑖)
A variável 𝛾𝐷𝑐 é determinada utilizando um modulador 𝑃𝑊𝑀 com realimentação de corrente,
que inclui um comparador histerético com largura de histerese 2∆𝑖𝐿𝑖 , representado na Figura 4.9.
Também possui um limitador na corrente 𝐼𝐿𝑖_𝑟𝑒𝑓 , de forma a evitar o funcionamento com correntes
superiores a um dado valor máximo pré-estabelecido (proteção de curto-circuito).
Esta estratégia de controlo implica uma frequência de comutação variável, ditada pela largura
da banda de histerese, embora também dependa da carga e do regime de funcionamento. Neste
caso a frequência de comutação tem um valor máximo dado por:
(4.32)
(4.33)
(4.34)
(4.35)
(4.36)
(4.37)

36
𝑓𝐷𝐶𝑚 á𝑥=
𝑉𝐵𝑎𝑡 𝑘𝐿
4𝐿𝑖휀
Tendo em conta que 𝑘𝐿 = 2 e 휀 = ∆𝑖𝐿𝑖 , obtém-se o valor para a frequência de comutação
máxima:
𝑓𝐷𝐶𝑚 á𝑥= 10,063 𝑘𝐻𝑧
4.4. Controlo da Tensão DC
O controlador de tensão no lado DC é semelhante ao controlador descrito em 4.2 para o caso
AC, pelo que as expressões para os ganhos proporcional e integral serão iguais a (4.29). Neste caso
apenas a referência da corrente segundo o eixo 𝑑 será gerada, sendo que se considera que a
referência da corrente segundo o eixo 𝑞 é nula de modo a maximizar o fator de potência. Observa-se,
na Figura 4.10, o esquema do sistema de controlo de tensão.
Sendo assim, as expressões que permitem dimensionar os ganhos proporcional 𝐾𝑝𝑏 e integral
𝐾𝑖𝑏 do controlador 𝑃𝐼 do controlo da tensão do lado DC são:
𝐾𝑝𝑏 =2,15𝐶0𝛼𝑖
𝛼𝑣𝑏𝐺𝑣𝑏𝑇𝑑𝑏 1,75 2
𝐾𝑖𝑏 =𝐶0𝛼𝑖
𝛼𝑣𝑏𝐺𝑣𝑏 1,75 3 𝑇𝑑𝑏 2
onde o ganho, 𝐺𝑣𝑏 , é dado por:
𝐺𝑣𝑏 = 3 × 230
𝑈𝑑𝑐
Considerando que:
𝑇𝑑𝑏 = 0,06𝛼𝑣𝑏 = 0,001
determina-se os valores de 𝐾𝑝𝑏 e 𝐾𝑖𝑏 :
𝐾𝑝𝑏 = 7,3428
𝐾𝑖𝑏 = 32,5263
(4.38)
(4.39)
(4.40)
(4.42)
(4.43)
(4.41)
37
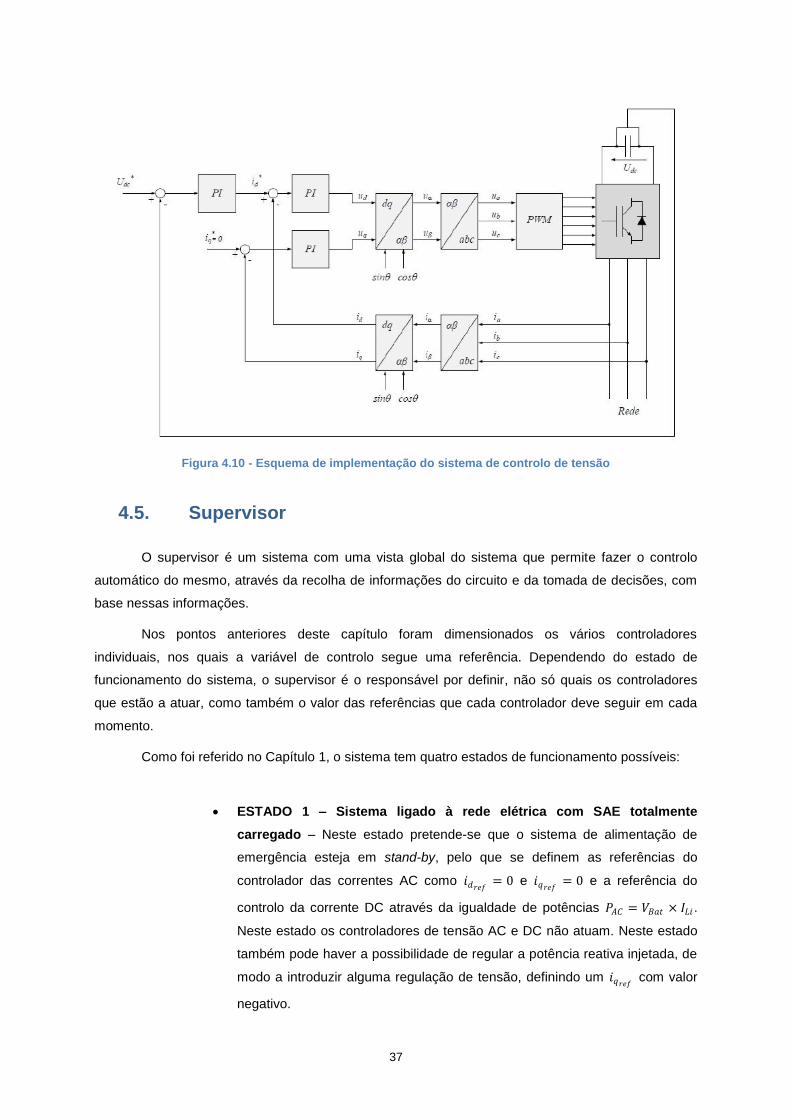
Figura 4.10 - Esquema de implementação do sistema de controlo de tensão
4.5. Supervisor
O supervisor é um sistema com uma vista global do sistema que permite fazer o controlo
automático do mesmo, através da recolha de informações do circuito e da tomada de decisões, com
base nessas informações.
Nos pontos anteriores deste capítulo foram dimensionados os vários controladores
individuais, nos quais a variável de controlo segue uma referência. Dependendo do estado de
funcionamento do sistema, o supervisor é o responsável por definir, não só quais os controladores
que estão a atuar, como também o valor das referências que cada controlador deve seguir em cada
momento.
Como foi referido no Capítulo 1, o sistema tem quatro estados de funcionamento possíveis:
ESTADO 1 – Sistema ligado à rede elétrica com SAE totalmente
carregado – Neste estado pretende-se que o sistema de alimentação de
emergência esteja em stand-by, pelo que se definem as referências do
controlador das correntes AC como 𝑖𝑑𝑟𝑒𝑓= 0 e 𝑖𝑞𝑟𝑒𝑓
= 0 e a referência do
controlo da corrente DC através da igualdade de potências 𝑃𝐴𝐶 = 𝑉𝐵𝑎𝑡 × 𝐼𝐿𝑖 .
Neste estado os controladores de tensão AC e DC não atuam. Neste estado
também pode haver a possibilidade de regular a potência reativa injetada, de
modo a introduzir alguma regulação de tensão, definindo um 𝑖𝑞𝑟𝑒𝑓 com valor
negativo.

38
ESTADO 2 – Sistema ligado à rede elétrica com 𝑺𝑶𝑪 do SAE inferior a
𝟏𝟎𝟎% - Neste estado a rede elétrica deve fornecer a carga e carregar o SAE,
pelo que se define a referência do controlo da corrente DC como 𝑖𝐿𝑖𝑟𝑒𝑓=
−600𝐴 e a do controlo da tensão DC como 𝑈𝑑𝑐𝑟𝑒𝑓 = 800𝑉. A saída do
controlador da tensão DC dá a referência 𝑖𝑑𝑟𝑒𝑓 para o controlador das
correntes AC e estabelece-se 𝑖𝑞𝑟𝑒𝑓= 0. Neste estado o controlo das tensões
AC não atua.
ESTADO 3 – Sistema em modo de rede isolada com 𝑺𝑶𝑪 do SAE acima
do valor limite de 𝟐𝟎% - Neste estado o sistema de alimentação de
emergência deve fornecer a tensão e corrente necessária à carga, pelo que
se definem as referências do controlador das tensões AC como 𝑣𝑑𝑟𝑒𝑓= 3 ×
230𝑉 e 𝑣𝑞𝑟𝑒𝑓= 0. As saídas deste controlador dão as referências para o
controlador das correntes AC do inversor, enquanto a referência do controlo
da corrente DC é definida de modo a manter 𝑈𝑑𝑐 = 800 𝑉, através da
igualdade de potências𝑃𝐴𝐶 = 𝑉𝐵𝑎𝑡 × 𝐼𝐿𝑖 . Neste estado o controlo da tensão DC
não atua.
ESTADO 4 – Sistema em modo de rede isolada com 𝑺𝑶𝑪 do SAE abaixo
do valor limite de 𝟐𝟎% - Neste estado considera-se que o sistema de
alimentação de emergência já não tem condições para fornecer a carga, pelo
que se definem as referências do controlador das correntes AC como
𝑖𝑑𝑟𝑒𝑓= 0 e 𝑖𝑞𝑟𝑒𝑓
= 0 e a referência do controlo da corrente DC através da
igualdade de potências 𝑃𝐴𝐶 = 𝑉𝐵𝑎𝑡 × 𝐼𝐿𝑖 . Neste estado os controladores de
tensão AC e DC não atuam.
Na Figura 4.11 apresenta-se o fluxograma do supervisor:
Figura 4.11 – Fluxograma do Supervisor
Rede elétrica operacional?
Sim SOCSAE
= 100% ESTADO 1
< 100% ESTADO 2
Não SOCSAE
>= 20% ESTADO 3
< 20% ESTADO 4
39
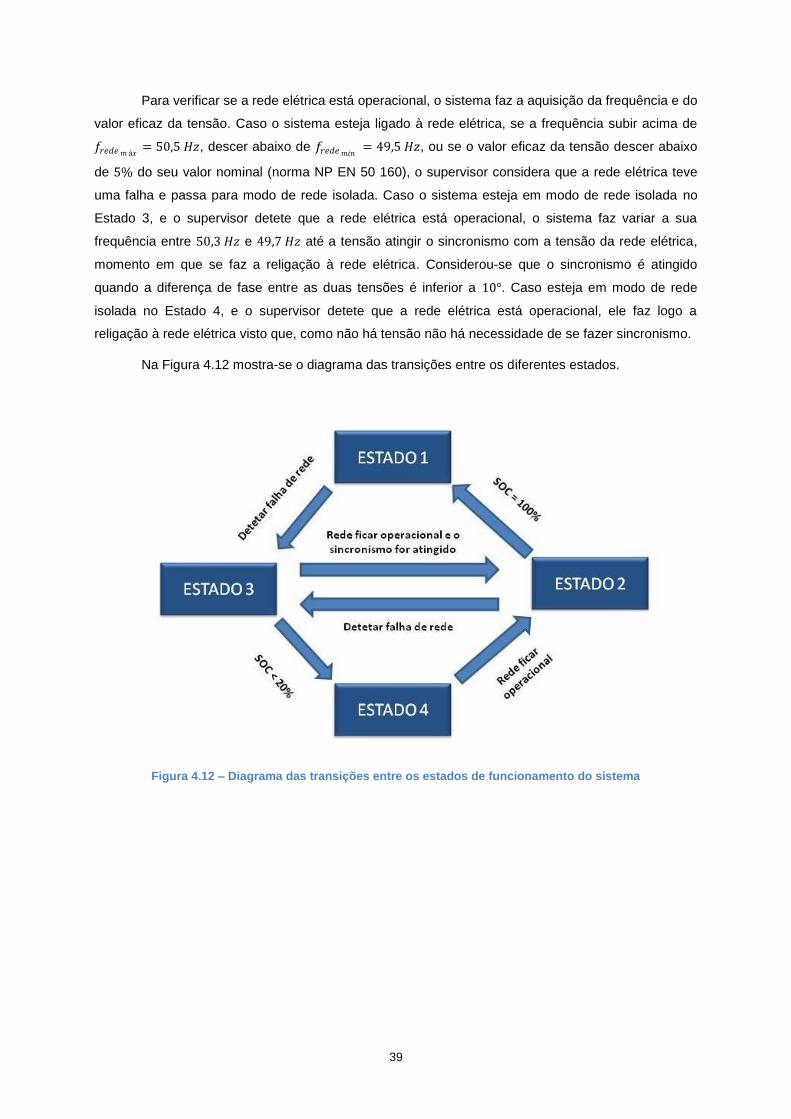
Para verificar se a rede elétrica está operacional, o sistema faz a aquisição da frequência e do
valor eficaz da tensão. Caso o sistema esteja ligado à rede elétrica, se a frequência subir acima de
𝑓𝑟𝑒𝑑𝑒 𝑚 á𝑥= 50,5 𝐻𝑧, descer abaixo de 𝑓𝑟𝑒𝑑𝑒 𝑚𝑖𝑛
= 49,5 𝐻𝑧, ou se o valor eficaz da tensão descer abaixo
de 5% do seu valor nominal (norma NP EN 50 160), o supervisor considera que a rede elétrica teve
uma falha e passa para modo de rede isolada. Caso o sistema esteja em modo de rede isolada no
Estado 3, e o supervisor detete que a rede elétrica está operacional, o sistema faz variar a sua
frequência entre 50,3 𝐻𝑧 e 49,7 𝐻𝑧 até a tensão atingir o sincronismo com a tensão da rede elétrica,
momento em que se faz a religação à rede elétrica. Considerou-se que o sincronismo é atingido
quando a diferença de fase entre as duas tensões é inferior a 10°. Caso esteja em modo de rede
isolada no Estado 4, e o supervisor detete que a rede elétrica está operacional, ele faz logo a
religação à rede elétrica visto que, como não há tensão não há necessidade de se fazer sincronismo.
Na Figura 4.12 mostra-se o diagrama das transições entre os diferentes estados.
Figura 4.12 – Diagrama das transições entre os estados de funcionamento do sistema

40
5. Resultados
Ao longo dos capítulos anteriores foi sendo feito o dimensionamento dos componentes
individuais que, juntos, constituem o sistema global proposto. Neste capítulo irão ser mostrados os
resultados desse sistema comandado automaticamente pelo supervisor. Para isso criou-se um
cenário em que o sistema, não só passa pelos quatro estados, como também faz as seis transições
possíveis. Em cada estado e transição irão ser mostradas as grandezas que permitam comprovar o
bom funcionamento do sistema.
Como condições iniciais, considera-se que o SAE está totalmente carregado e que a rede
elétrica está operacional. Além disso considera-se que a rede elétrica tem a seguinte evolução:
Falha de rede em 𝑡 = 0,12 𝑠;
Rede operacional em 𝑡 = 0,2 𝑠;
Falha de rede em 𝑡 = 0,31 𝑠;
Rede operacional em 𝑡 = 0,7 𝑠.
De referir que, para que a duração da simulação computacional fosse adequada, alterou-se a
capacidade das baterias, de modo a que 0,1 segundos da simulação correspondessem a 10 minutos
em tempo real. Além disso, também se considerou no supervisor que a corrente de carga do SAE era
de 600 𝐴 de forma a se conseguir observar o mesmo a carregar no tempo da simulação. No entanto,
numa situação real, este valor poderia ser mais reduzido pois, usualmente, estes sistemas têm um
carregamento lento. Além disso há que ter em conta que o sentido do trânsito de energia
convencionado é da rede elétrica para a carga e para o Sistema de Alimentação de Emergência.
Figura 5.1 - Estado de ligação à rede elétrica e estado de funcionamento do sistema

41
Figura 5.2 - Grandezas do Sistema de Armazenamento de Energia. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.
Na Figura 5.1 observa-se o estado de ligação à rede elétrica, em que o valor 1 simboliza que
o sistema está conectado à rede e o valor 0 simboliza que o sistema está em modo de rede isolada, e
o estado de funcionamento do sistema. Na Figura 5.2 observam-se as grandezas do SAE.
Comparando estas duas figuras com o fluxograma do supervisor, Figura 4.11, verifica-se que:
quando o sistema está ligado à rede elétrica e o 𝑆𝑂𝐶 = 100% (0 < 𝑡 ≤ 0,12 e
1,35 < 𝑡 ≤ 1,5), este encontra-se no Estado 1 e o SAE está em stand-by, como se
comprova pelo valor nulo da corrente;
quando o sistema está ligado à rede elétrica e o 𝑆𝑂𝐶 < 100% (0,2 < 𝑡 ≤ 0,31 e
0,7 < 𝑡 ≤ 1,35), este encontra-se no Estado 2 e o SAE está a ser carregado, como se
comprova pelo valor positivo da corrente;
quando o sistema está em modo de rede isolada e o 𝑆𝑂𝐶 >= 20% (0,12 < 𝑡 ≤ 0,2 e
0,31 < 𝑡 ≤ 0,6), este encontra-se no Estado 3 e o SAE alimenta a carga, como se
comprova pelo valor negativo da corrente;
quando o sistema está em modo de rede isolada e o 𝑆𝑂𝐶 < 20% (0,6 < 𝑡 ≤ 0,7), este
encontra-se no Estado 4 e o SAE está em stand-by, como se comprova pelo valor
nulo da corrente.
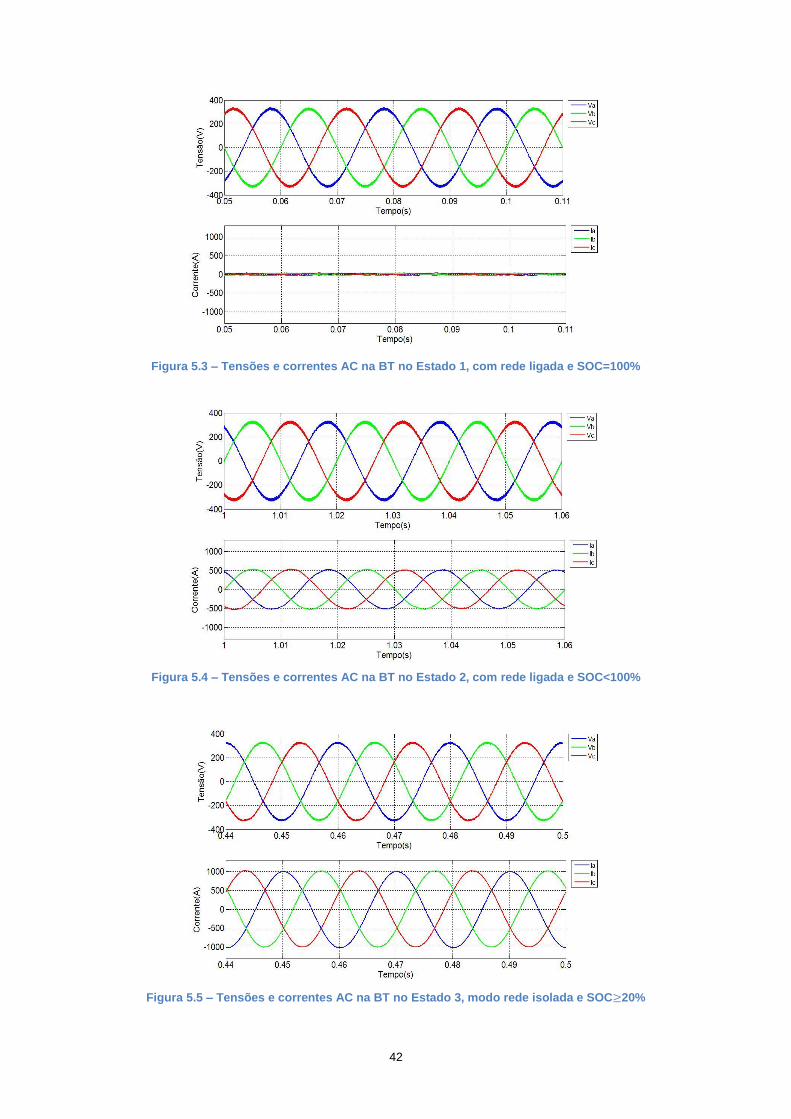
42
Figura 5.3 – Tensões e correntes AC na BT no Estado 1, com rede ligada e SOC=100%
Figura 5.4 – Tensões e correntes AC na BT no Estado 2, com rede ligada e SOC<100%
Figura 5.5 – Tensões e correntes AC na BT no Estado 3, modo rede isolada e SOC≥20%

43
Figura 5.6 – Tensões e correntes AC na BT no Estado 4, modo rede isolada e SOC<20%
Figura 5.7 – Taxa de Distorção Harmónica (THD) das correntes AC na BT no Estado 2, com rede ligada e SOC<100%
Nas Figuras 5.3 a 5.6 observa-se as tensões e correntes AC, no lado da Baixa Tensão, nos
quatro estados possíveis e na Figura 5.7 observa-se a THD das correntes no Estado 2.
De salientar que nos Estados 1 e 4 o Sistema de Alimentação encontra-se em stand-
by, o que explica a corrente nula.
Olhando para os Estados 2 e 3, percebe-se a diferença no valor da amplitude da
corrente e também na desfasagem entre tensão e corrente.
No Estado 3, o Sistema de Alimentação de Emergência está a alimentar a carga, logo
a tensão e a corrente estão em oposição de fase e a amplitude da corrente é a
pedida pela carga.
No Estado 2, o SAE está a ser carregado, ou seja o sentido do trânsito de energia é o
oposto em relação ao Estado 3, o que se verifica pelo facto das tensões e correntes
se encontrarem em fase. Além disso, neste caso a amplitude da corrente é a
necessária para que o SAE seja carregado a 600 𝐴.
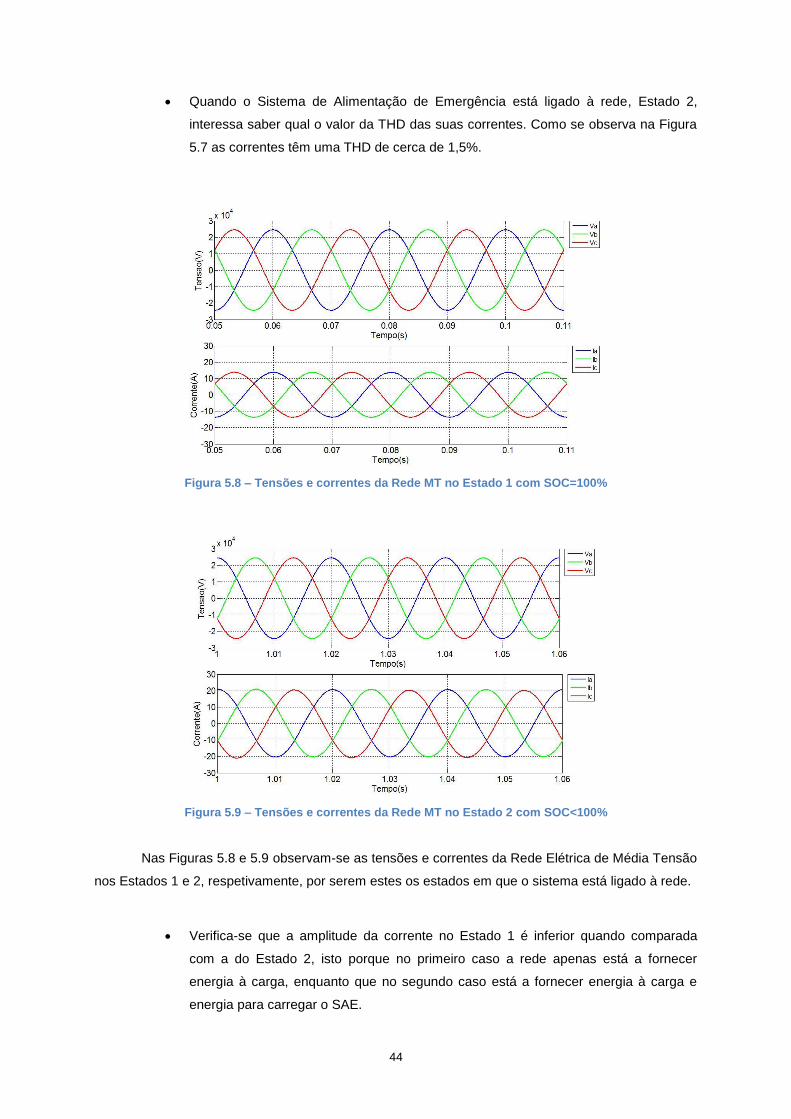
44
Quando o Sistema de Alimentação de Emergência está ligado à rede, Estado 2,
interessa saber qual o valor da THD das suas correntes. Como se observa na Figura
5.7 as correntes têm uma THD de cerca de 1,5%.
Figura 5.8 – Tensões e correntes da Rede MT no Estado 1 com SOC=100%
Figura 5.9 – Tensões e correntes da Rede MT no Estado 2 com SOC<100%
Nas Figuras 5.8 e 5.9 observam-se as tensões e correntes da Rede Elétrica de Média Tensão
nos Estados 1 e 2, respetivamente, por serem estes os estados em que o sistema está ligado à rede.
Verifica-se que a amplitude da corrente no Estado 1 é inferior quando comparada
com a do Estado 2, isto porque no primeiro caso a rede apenas está a fornecer
energia à carga, enquanto que no segundo caso está a fornecer energia à carga e
energia para carregar o SAE.
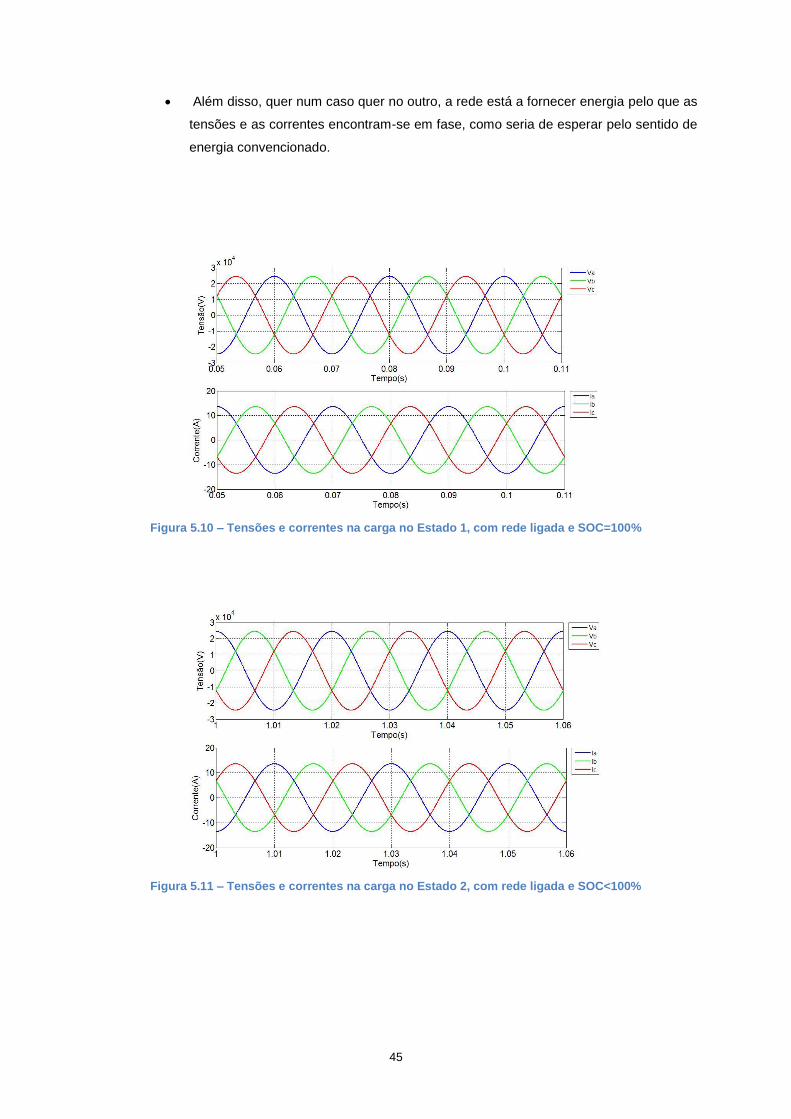
45
Além disso, quer num caso quer no outro, a rede está a fornecer energia pelo que as
tensões e as correntes encontram-se em fase, como seria de esperar pelo sentido de
energia convencionado.
Figura 5.10 – Tensões e correntes na carga no Estado 1, com rede ligada e SOC=100%
Figura 5.11 – Tensões e correntes na carga no Estado 2, com rede ligada e SOC<100%

46
Figura 5.12 – Tensões e correntes na carga no Estado 3, modo rede isolada e SOC≥20%
Figura 5.13 – Tensões e correntes na carga no Estado 4, modo rede isolada e SOC<20%
Nas Figuras 5.10 a 5.13 apresentam-se as tensões e correntes na carga nos quatro estados
possíveis.
Como se pode verificar, apenas no Estado 4 as formas de onda se alteram sendo
nulas, pois o Sistema de Alimentação de Emergência e a rede estão desligados. Isto
comprova o bom funcionamento do sistema pois, independentemente do estado de
funcionamento, a carga recebe a energia necessária sem perturbações.
Além das formas de onda das grandezas em cada estado, também interessa observar como
é que o sistema reage às transições entre estados. Por esse motivo, irão ser apresentados de
seguida os resultados da simulação nos instantes das seis transições possíveis entre estados,
nomeadamente as variáveis que informam o supervisor de mudança de estado e algumas das
grandezas mais significativas, como as tensões e correntes na carga e na Baixa Tensão e as
grandezas do SAE.

47
Figura 5.14 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 1 para 3
Figura 5.15 - Frequência da rede elétrica na transição de Estado 1 para 3
Figura 5.16 – Valor eficaz da tensão na rede de MT na transição de Estado 1 para 3

48
Figura 5.17 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 1 para 3. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.
Figura 5.18 – Tensões e correntes AC na BT na transição de Estado 1 para 3

49
Figura 5.19 – Tensões e correntes na carga na transição de Estado 1 para 3
Observando as Figuras 5.14 e 5.15, verifica-se que há mudança do Estado 1 para o
Estado 3 no momento em que o supervisor deteta que a frequência da rede desce
abaixo do valor limite de 49,5 𝐻𝑧.
No momento da transição o Sistema de Alimentação de Emergência começa a
fornecer energia, Figura 5.17, e nas tensões e correntes na BT e na carga, verifica-se
uma pequena perturbação que rapidamente desaparece.
Figura 5.20 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 3 para 2

50
Figura 5.21 - Diferença de fase em valor absoluto entre a tensão da rede elétrica e a tensão de saída do Sistema de Alimentação de Emergência na transição do Estado 3 para 2
Figura 5.22 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 3 para 2. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.

51
Figura 5.23 – Tensões e correntes AC na BT na transição de Estado 3 para 2
Figura 5.24 – Tensões e correntes na carga na transição de Estado 3 para 2
Nas Figuras 5.20 e 5.21, pode-se observar que, quando a diferença de fase entre a
tensão da rede elétrica e a tensão de saída do Sistema de Alimentação de
Emergência fica inferior a 10°, o supervisor considera que o sincronismo foi atingido e
promove a mudança do Estado 3 para o Estado 2.
Na Figura 5.22 verifica-se que no momento dessa transição o SAE deixa de estar a
fornecer energia para estar a receber energia, procedendo assim ao seu
carregamento.

52
Nota-se ainda nas tensões e correntes na BT, Figura 5.23, um transitório que advém
da inversão do sentido da corrente, enquanto nas tensões e correntes na carga,
Figura 5.24, existe uma pequena perturbação que se deve ao facto da diferença de
fase, representada na Figura 5.21, não ser nula no instante da transição.
Figura 5.25 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 2 para 3
Figura 5.26 - Frequência da rede elétrica na transição de Estado 2 para 3

53
Figura 5.27 – Valor eficaz da tensão na rede de MT na transição de Estado 2 para 3
Figura 5.28 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 2 para 3. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.

54
Figura 5.29 – Tensões e correntes AC na BT na transição de Estado 2 para 3
Figura 5.30 - Tensões e correntes na carga na transição de Estado 2 para 3
Tal como na transição do Estado 1 para 3, também aqui se observa a transição do
Estado 2 para 3, Figura 5.25, quando a frequência da rede desce abaixo do valor
limite, Figura 5.26.
Verifica-se na Figura 5.28 a inversão no sentido do trânsito de energia no instante da
transição: inicialmente a energia estava a ser fornecida ao SAE e depois, começa a
ser fornecida pelo SAE.

55
Nota-se na Figura 5.29 um transitório nas tensões e correntes na BT que se deve ao
facto de haver uma inversão no sentido da corrente. As tensões e correntes na carga
também são afetadas por este transitório, visto ser o Sistema de Alimentação de
Emergência que está a alimentar a carga.
Figura 5.31 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 3 para 4
Figura 5.32 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 3 para 4. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.

56
Figura 5.33 – Tensões e correntes AC na BT na transição de Estado 3 para 4
Figura 5.34 – Tensões e correntes na carga na transição de Estado 3 para 4
Nas Figuras 5.31 e 5.32 verifica-se que quando o 𝑆𝑂𝐶 do SAE fica inferior a 20% o
supervisor dá ordem de mudança do Estado 3 para o Estado 4, por considerar que o
sistema já não tem capacidade para fornecer a carga.
Isto leva a que as tensões e correntes na BT e na carga se tornem nulas, Figura 5.33
e 5.34.
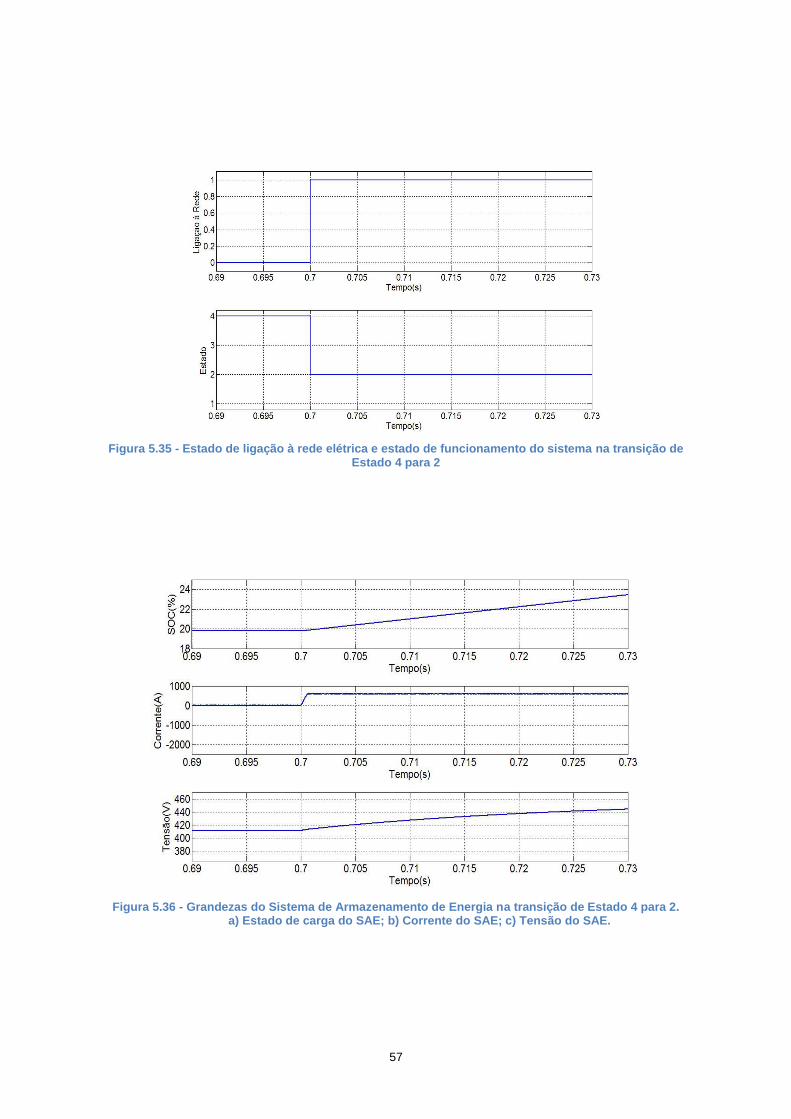
57
Figura 5.35 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 4 para 2
Figura 5.36 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 4 para 2. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.

58
Figura 5.37 – Tensões e correntes AC na BT na transição de Estado 4 para 2
Figura 5.38 - Tensões e correntes na carga na transição de Estado 4 para 2
Observa-se nas Figuras 5.35 e 5.36, a mudança de Estado 4 para Estado 2 e o SAE
a começar a carregar a partir do instante em que a rede elétrica volta a ficar
operacional.
Na Figura 5.37 verifica-se um transitório nas tensões e correntes na BT, enquanto
que na Figura 5.38 as tensões e correntes na carga, sofrem uma menor perturbação
visto esta estar a ser alimentada pela rede elétrica.

59
Figura 5.39 - Estado de ligação à rede elétrica e estado de funcionamento do sistema na transição de Estado 2 para 1
Figura 5.40 - Grandezas do Sistema de Armazenamento de Energia na transição de Estado 2 para 1. a) Estado de carga do SAE; b) Corrente do SAE; c) Tensão do SAE.

60
Figura 5.41 – Tensões e correntes AC na BT na transição de Estado 2 para 1
Figura 5.42 – Tensões e correntes na carga na transição de Estado 2 para 1
Nas Figuras 5.39 e 5.40 verifica-se a passagem do Estado 2 para o Estado 1 no
instante em que o SAE fica totalmente carregado, ou seja quando 𝑆𝑂𝐶 = 100%, e a
consequente colocação do Sistema de Alimentação de Emergência em stand-by.
Pelo facto do Sistema de Alimentação de Emergência passar para stand-by
observam-se, na Figura 5.41, as correntes na BT a tornarem-se nulas.

61
Por seu lado, pelo facto da carga continuar a ser alimentada pela rede elétrica, esta
não sente a mudança de estado, o que se comprova pelas tensões e correntes na
carga não sofrerem perturbação alguma, Figura 5.42.
Em seguida irão ser observados os gráficos do valor eficaz da tensão na rede de MT para
três casos diferentes: carga máxima, meia carga (50% da carga) e vazio (10% da carga).
Figura 5.43 – Valor eficaz da tensão na rede MT em carga máxima
Figura 5.44 – Valor eficaz da tensão na rede MT em meia carga

62
Figura 5.45 – Valor eficaz da tensão na rede MT em vazio
Observando as Figuras 5.43 a 5.45, verifica-se que na situação de carga máxima o valor
eficaz tem maiores oscilações nas mudanças de estado de ligação à rede, inclusive tem valor nulo
(corresponde ao Estado 4). Nas outras duas figuras não existem diferenças significativas entre si e,
comparando-as com a Figura 5.43, verifica-se que nunca têm valor nulo, pois nunca atingem o
Estado 4, sistema todo desligado.
Finalmente serão mostrados alguns gráficos numa situação de cava de tensão, em que nos
encontramos no Estado 1, ligado à rede com SOC=100%, e em vez de se definir 𝑖𝑞𝑟𝑒𝑓= 0, define-se a
partir de 0.1 segundos 𝑖𝑞𝑟𝑒𝑓 com um valor negativo, de forma a injetar energia reativa na rede para
verificar se é possível eliminar a cava. São feitos quatro testes: definindo 𝑖𝑞𝑟𝑒𝑓= −500 𝐴 e 𝑆𝐶𝐶𝑟𝑒𝑑𝑒
=
100 𝑀𝑉𝐴; definindo 𝑖𝑞𝑟𝑒𝑓= −500 𝐴 e 𝑆𝐶𝐶𝑟𝑒𝑑𝑒
= 25 𝑀𝑉𝐴; definindo 𝑖𝑞𝑟𝑒𝑓= −750 𝐴 e 𝑆𝐶𝐶𝑟𝑒𝑑𝑒
= 100 𝑀𝑉𝐴e
finalmente definindo 𝑖𝑞𝑟𝑒𝑓= −750 𝐴 e 𝑆𝐶𝐶𝑟𝑒𝑑𝑒
= 25 𝑀𝑉𝐴.
Figura 5.46 – Valor eficaz da tensão na rede MT com Scc=100 MVA em situação de cava com injeção de
energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟓𝟎𝟎 𝑨)

63
Figura 5.47 – Valor eficaz da tensão na rede MT com Scc=25 MVA em situação de cava com injeção de
energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟓𝟎𝟎 𝑨)
Figura 5.48 – Valor eficaz da tensão na rede MT com Scc=100 MVA em situação de cava com injeção de
energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟕𝟓𝟎 𝑨)
Figura 5.49 – Valor eficaz da tensão na rede MT com Scc=25 MVA em situação de cava com injeção de
energia reativa (𝒊𝒒𝒓𝒆𝒇= −𝟕𝟓𝟎 𝑨)

64
Observa-se, nas Figura 5.46 a 5.49, que, como seria de esperar, o valor eficaz da tensão tem
uma maior subida com 𝑖𝑞𝑟𝑒𝑓= −750 𝐴, no entanto verificou-se que neste caso o sistema entrava em
sobremodulação. Também se verificou que, quanto menor for a potência de curto-circuito da rede,
maior será a variação do valor eficaz da tensão. Na tabela 5.1 apresenta-se a variação do valor eficaz
da tensão para os diversos casos.
Tabela 5.1 - Variação do valor eficaz da tensão na rede MT numa situação de cava de tensão nos casos estudados
Variação Valor Eficaz da Tensão
Scc=100 MVA Scc=25 MVA
Iq=-500 A + 0,47% + 1,86%
Iq=-750 A + 0,7% + 2,82%
Verifica-se que de facto o valor eficaz da tensão na rede sobe após a injeção de reativa, no
entanto o sistema não tem capacidade para eliminar a cava de tensão, sendo que o melhor que
consegue é uma subida de 2,82%.
65
6. Conclusões
A energia elétrica tornou-se um bem muito importante para o dia-a-dia da sociedade atual, de
tal forma que uma falha da mesma traz consequências graves para a sociedade. Essas
consequências ainda se tornam mais gravosas quando afetam sistemas que são eticamente ou
economicamente sensíveis a uma falha de energia, como por exemplo hospitais, redes de
telecomunicações, bancos, entre outros.
É nesse enquadramento que surge o tema desta Tese de Mestrado. É proposto um Sistema
de Alimentação de Emergência, ligado a uma carga crítica, em paralelo com a rede que, no caso da
existência de uma falha na rede elétrica, seja capaz de alimentar essa carga durante um determinado
período de tempo. Esse Sistema de Alimentação de Emergência é constituído por um Sistema de
Armazenamento de Energia, um conversor DC/DC elevador e dois inversores trifásicos ligados em
paralelo.
Começou-se por dimensionar o Sistema de Armazenamento de Energia, constituído por
baterias, para que este fosse capaz de fornecer a energia necessária à carga durante 30 minutos.
Em seguida fez-se o dimensionamento do Sistema de Conversão de Energia, garantindo, a
bidirecionalidade do trânsito de energia: da rede para o SAE ou do SAE para a rede/carga crítica.
Apresentou-se a estratégia de comando de cada um dos conversores e dimensionaram-se os
componentes de filtragem necessários ao adequado funcionamento do sistema.
De seguida, dimensionaram-se individualmente os controladores das tensões e correntes do
lado AC e do lado DC do Sistema de Alimentação de Emergência. Também se dimensionou um
sistema Supervisor cujo objetivo é fazer um controlo automático do Sistema Global. Este sistema
Supervisor recebe dados de vários pontos do Sistema que e, de acordo com essas informações
decide o estado de funcionamento em que este se deve encontrar, através da escolha dos
controladores que devem atuar e da imposição das referências adequadas aos mesmos. De salientar
que o supervisor impõe uma corrente de referência de carga do SAE de 600 𝐴 para que se pudessem
ver resultados nas simulações, no entanto numa situação real este valor poderia ser mais reduzido
pois, para o tipo de aplicação que este Sistema foi projetado, usualmente faz-se um carregamento
lento do SAE.
Finalmente depois de todo o Sistema construído realizou-se uma simulação que pudesse
explorar o comportamento do mesmo. Da observação dos resultados obtidos concluiu-se que o
Sistema funciona convenientemente em todas as situações possíveis. Verificou-se que o Sistema de
Alimentação de Emergência consegue alimentar a carga no caso da existência duma interrupção na
rede elétrica; e verificou-se a capacidade que a rede tem de carregar o SAE caso este não esteja
totalmente carregado. Nesta situação também se verificou que a THD das correntes AC na Baixa
Tensão tem o valor de 1,5%, o que se encontra dentro dos parâmetros da norma NP EN 50 160.

66
Existem alguns pequenos transitórios aquando das mudanças de estado, mas que não afetam o bom
desempenho do Sistema. Ainda se observou o valor eficaz da tensão em três regimes da carga
diferentes (carga máxima, meia carga e vazio) e concluiu-se que, excluindo o primeiro caso em que a
tensão eficaz vai a zero pois o sistema desliga-se, o valor da tensão eficaz não varia
significativamente com o regime de carga. Finalmente testou-se um cenário de cava de tensão em
que se utilizou o sistema dimensionado para injetar energia reativa na rede, a fim de verificar se a
cava era eliminada, e concluiu-se que, embora se consiga fazer uma pequena regulação de tensão
(menor que 3%), esta não é suficiente para eliminar uma cava de tensão.
O principal objetivo de garantir que fosse fornecida a energia necessária à carga crítica,
mesmo durante uma falha da rede elétrica, foi atingido, sendo que esta apenas fica sem energia
quando o Sistema de Armazenamento de Energia deixa de ter capacidade para a fornecer.
6.1. Perspetivas de Trabalho Futuro
Como trabalho futuro, seria interessante estudar uma situação em que o SAE estivesse
diretamente ligado ao sistema de conversão DC/AC.
Além disso também se poderia fazer o estudo de um carregamento a tensão constante das
baterias, visto que neste trabalho foi feito um carregamento a corrente constante.
Outra sugestão interessante seria fazer uma gestão individual da carga das baterias, uma vez
que neste trabalho é feita a gestão das baterias como um único sistema.
Também seria interessante estudar uma maneira de resolver um desequilíbrio entre as
tensões de cada fase da rede elétrica, ou mesmo algum defeito numa só fase da mesma, já que
neste trabalho considerou-se que as tensões trifásicas da rede eram sempre equilibradas.
Finalmente poder-se-iam fazer uma aplicação prática e testes em laboratório para averiguar o
comportamento deste sistema numa situação real.

67
Bibliografia
[Correia, 2012] CORREIA, Sérgio Caiado Lopes. “Módulo Inteligente para Integração de Sistemas
de Energia Renovável na Rede Eléctrica”. Tese de Mestrado, Instituto Superior Técnico, Universidade
Técnica de Lisboa, Abril de 2012.
[Freedom] Manual Técnico Bateria Estacionária Freedom Disponível:
http://www.neosolar.com.br/loja/bateria-estacionaria-freedom-df2000-115ah-105ah.html.[Acedido em
4 de Junho de 2014]
[Mendes, 2013] MENDES, Pedro Filipe Viola. “Matrix Converter Based High Power High Frequency
Modular Transformers for Traction Conversion Systems”. Tese de Mestrado, Instituto Superior
Técnico, Universidade Técnica de Lisboa, Outubro de 2013.
[Moreira, 2013] MOREIRA, Diogo Alexandre Miranda. “Posto de Carregamento de Veículos
Eléctricos com Painel Fotovoltaico, Sistema de Armazenamento e Ligação à Rede Eléctrica”.Tese de
Mestrado, Instituto Superior Técnico, Universidade Técnica de Lisboa, Outubro de 2013.
[NCT] National Certificate in Technology. [Online] Disponível: http://www.nct-
tech.edu.lk/Download/Technology%20Zone/Importance%20of%20electrical%20Energy..pdf.[Acedido
em 8 de Setembro de 2014].
[Pinto, et al, 2006] PINTO, S.; SILVA, J.; GAMBÔA, P.. "Current Control of a Venturini Based Matrix
Converter". IEEE InternationalSymposiumon Industrial Electronics - ISIE 2006, Vol. 4, pp. 3214-3219,
Montréal, Canada, Julho de 2006.
[Pinto, et al, 2011a] PINTO, Sónia; SILVA, J. Fernando; SILVA, Filipe; FRADE, Pedro. “Design of a
Virtual Lab to Evaluate and Mitigate Power Quality Problems Introduced by Microgeneration”.Capítulo
8, pp. 185-206, em "Electrical Generation and Distribution Systems and Power Quality Disturbances",
Editor Gregorio Romero, Intech, 2011.
[Pinto, et al, 2011b] PINTO, S.; SILVA, J.; LOPES, S.. "Smart Microgeneration Systems for Power
Quality Improvement". International Review of Electrical Engineering, Praize Worthy Prize, Vol. 6,
Número 6, pp. 2723-2735, Novembro de 2011.
[Sarmento, et al, 2010] SARMENTO, Francisco Manuel Martins. “Modelo de Ligação de uma Pilha
de Combustível a uma Microrede”. Tese de Mestrado, Instituto Superior Técnico, Universidade
Técnica de Lisboa, Novembro de 2010.
68
[Silva, et al, 2003] SILVA, J. F.; PIRES, V. F.; PINTO, S. F.; BARROS, J. D.. "Advanced control
Methods for Power Electronics Systems". Mathematics and Computers in Simulation, Elsevier,
Número 63, Vol. 3, pp. 281-295, Novembro de 2003.
[Silva, et al, 2009] SILVA, F.; PINTO, S. F.; SILVA, J. F.. "Impact of Microgeneration on the Quality of
Power: Effect on the Voltage Waveform". 35th Annual Conference of the IEEE Industrial Electronics
Society - IECON '09, pp. 3672-3678, Porto, Portugal, Novembro 2009.
[Silva, et al, 2011] SILVA, J. F.; PINTO, S. F.. "Advanced Control of Switching Power Converters".
Capítulo36 , pp. 1037-1113, em Power Electronics Handbook 3rd Edition, Editor M. H. Rashid,
Burlington: Butterworth-Heinemann, ELSEVIER, ISBN: 978-0-12-382036-5, 2011.
[Silva, 2012] SILVA, J. Fernando. "Energy Storage for Autonomous Systems"– Textos de Apoio.
Lisboa: Instituto Superior Técnico, IST, 2012.
[Silva, et al, 2012] SILVA, Fernando; SANTANA, João; PINTO, Sónia. "Conversores Comutados
para Energias Renováveis"– Textos de Apoio. Lisboa: Instituto Superior Técnico, IST, 2012.
[Silva, 2013] SILVA, José Fernando Alves da. “Electrónica Industrial: Semicondutores e
Conversores de Potência”. 2ª Edição, Fundação Calouste Gulbenkian, 2013.
[Teodorescu, et al, 2004] TEODORESCU, Remus; BLAABJERG, Frede. “Flexible Control of Small
Wind Turbines With Grid Failure Detection Operating in Stand-Alone and Grid-Connected Mode”.
IEEE TRANSACTIONS ON POWER ELECTRONICS, Vol. 19, Nº 5, Setembro 2004.
[Vargas, 2011] VARGAS, Maria João Vilhena. “Conversores de Potência para Fontes de Energia
Híbridas”.Tese de Mestrado, Instituto Superior Técnico, Universidade Técnica de Lisboa, Outubro de
2011.
[Vazquez, et al, 2010] VAZQUEZ, Sergio; LUKIC, Srdjan M.; GALVAN, Eduardo; FRANQUELO,
Leopoldo G.; CARRASCO, Juan M.. “Energy Storage Systems for Transport and Grid Applications”
.IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, Vol. 57, Nº 12, Dezembro 2010.
[Wang, et al, 2003] WANG, Timothy CY; YE, Zhihong; SINHA, Gautam; YUAN, Xiaoming.“Output
Filter Design for a Grid-interconnected Three-Phase Inverter”. IEEE 34th Annual Power Electronics
Specialist Conference - PESC '03, Vol. 2, pp. 779-784, Acapulco, Mexico, Junho de 2003.
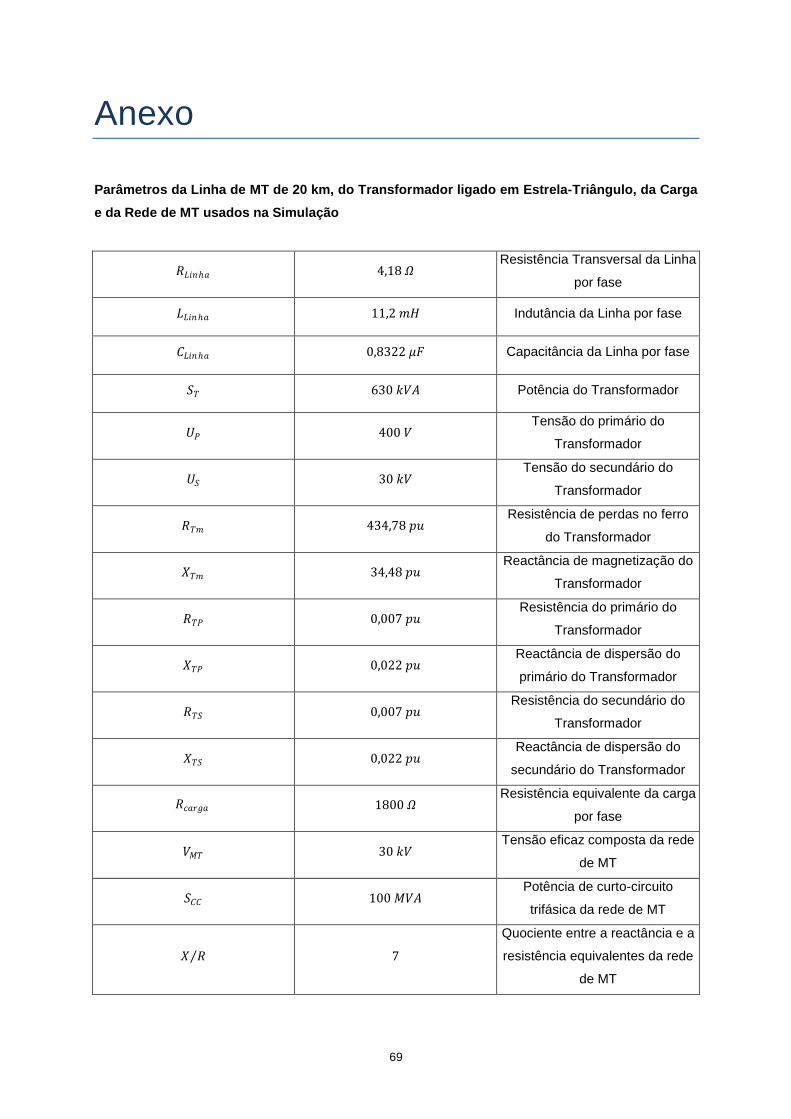
69
Anexo
Parâmetros da Linha de MT de 20 km, do Transformador ligado em Estrela-Triângulo, da Carga
e da Rede de MT usados na Simulação
𝑅𝐿𝑖𝑛𝑎 4,18 𝛺 Resistência Transversal da Linha
por fase
𝐿𝐿𝑖𝑛𝑎 11,2 𝑚𝐻 Indutância da Linha por fase
𝐶𝐿𝑖𝑛𝑎 0,8322 𝜇𝐹 Capacitância da Linha por fase
𝑆𝑇 630 𝑘𝑉𝐴 Potência do Transformador
𝑈𝑃 400 𝑉 Tensão do primário do
Transformador
𝑈𝑆 30 𝑘𝑉 Tensão do secundário do
Transformador
𝑅𝑇𝑚 434,78 𝑝𝑢 Resistência de perdas no ferro
do Transformador
𝑋𝑇𝑚 34,48 𝑝𝑢 Reactância de magnetização do
Transformador
𝑅𝑇𝑃 0,007 𝑝𝑢 Resistência do primário do
Transformador
𝑋𝑇𝑃 0,022 𝑝𝑢 Reactância de dispersão do
primário do Transformador
𝑅𝑇𝑆 0,007 𝑝𝑢 Resistência do secundário do
Transformador
𝑋𝑇𝑆 0,022 𝑝𝑢 Reactância de dispersão do
secundário do Transformador
𝑅𝑐𝑎𝑟𝑔𝑎 1800 𝛺 Resistência equivalente da carga
por fase
𝑉𝑀𝑇 30 𝑘𝑉 Tensão eficaz composta da rede
de MT
𝑆𝐶𝐶 100 𝑀𝑉𝐴 Potência de curto-circuito
trifásica da rede de MT
𝑋 𝑅 7
Quociente entre a reactância e a
resistência equivalentes da rede
de MT