Embed Size (px)
DESCRIPTION
Power electronics experiment
Citation preview

EE833 - Experiencia 2
Relatorio do experimento 2 para o laboratorio de EE833.
Gleison Goncalves Toledo StortoPlınio Santini Dester
Supervisor: Prof. Dr. Marcelo Gradella Villalva
Faculdade de Engenharia Eletrica e Computacao (FEEC)
Universidade Estadual de Campinas (UNICAMP)
15 de setembro de 2015
1 Introducao
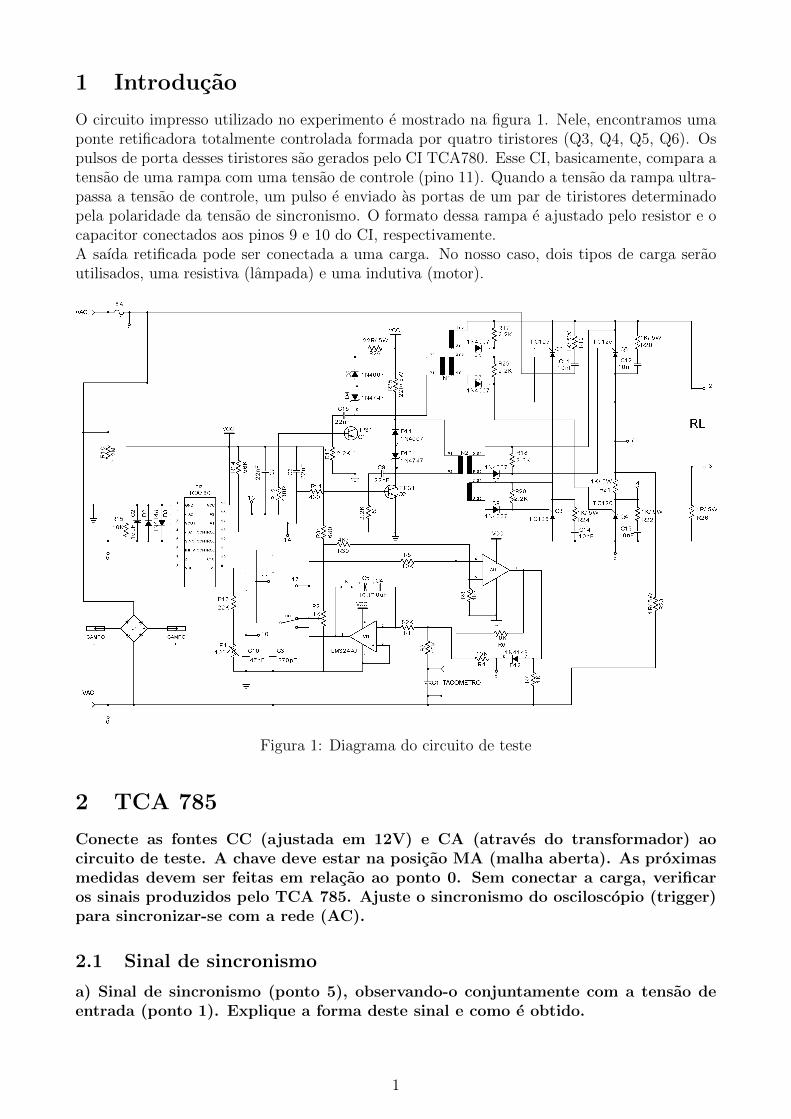
O circuito impresso utilizado no experimento e mostrado na figura 1. Nele, encontramos umaponte retificadora totalmente controlada formada por quatro tiristores (Q3, Q4, Q5, Q6). Ospulsos de porta desses tiristores sao gerados pelo CI TCA780. Esse CI, basicamente, compara atensao de uma rampa com uma tensao de controle (pino 11). Quando a tensao da rampa ultra-passa a tensao de controle, um pulso e enviado as portas de um par de tiristores determinadopela polaridade da tensao de sincronismo. O formato dessa rampa e ajustado pelo resistor e ocapacitor conectados aos pinos 9 e 10 do CI, respectivamente.A saıda retificada pode ser conectada a uma carga. No nosso caso, dois tipos de carga seraoutilisados, uma resistiva (lampada) e uma indutiva (motor).
Figura 1: Diagrama do circuito de teste
2 TCA 785
Conecte as fontes CC (ajustada em 12V) e CA (atraves do transformador) aocircuito de teste. A chave deve estar na posicao MA (malha aberta). As proximasmedidas devem ser feitas em relacao ao ponto 0. Sem conectar a carga, verificaros sinais produzidos pelo TCA 785. Ajuste o sincronismo do osciloscopio (trigger)para sincronizar-se com a rede (AC).
2.1 Sinal de sincronismo
a) Sinal de sincronismo (ponto 5), observando-o conjuntamente com a tensao deentrada (ponto 1). Explique a forma deste sinal e como e obtido.
1

Como podemos ver pela figura 2, a tensao de sincronismo corresponde a tensao de pola-rizacao de dois diodos reversos conectados entre tensao de entrada e ao terra. Quando a tensaode entrada e positiva e superior a tensao de polarizacao, teremos o pico em torno de 600mV. Demodo analogo, durante a parte negativa, teremos o oposto da tensao de polarizacao, ou seja,cerca de −600mV.O esquema de ligacao dos diodos pode ser visualizado pela figura 1 no pino 5 do CI. Umaresistencia limitadora de corrente e conectada em serie aos diodos.
Figura 2: Tensao de entrada (Canal 1, 50V/divisao)Tensao de sincronismo (Canal 2, 560mV/divisao)
Escala de tempo: 10ms/divisao
2.2 Rampa
b) Rampa (ponto 10), observando-os conjuntamente com a tensao de entrada(ponto 1). Meca a frequencia deste sinal, verifique seu sincronismo com a tensaoda rede.
Pela figura 3, fica claro que o comeco da subida da rampa sempre sera sıncrono a passagempelo zero da senoide. Tal comportamento provem do proprio TCA 875. Quando detectada apassagem pelo zero, um transistor descarrega a capacitancia. Esses blocos podem ser identifi-cados na figura 4.E evidente, tambem pelo diagrama de blocos do TCA 875 (figura 4), que a inclinacao de subidada rampa sera funcao da resistencia no pino 9, devido ao seu controle da corrente de carrega-mento da capacitancia e da propria capacitancia (pino 10).Finalmente, essa rampa tera o dobro de frequencia da senoide, pois ela e perıodica aos seuszeros (f = 119, 3Hz ≈ 2 · 60Hz).
2

Figura 3: Tensao de entrada (Canal 1, 32V/divisao)Tensao da rampa (Canal 2, 3,3V/divisao)
Escala de tempo: 10ms/divisao
Frequencia da rampa: 119, 3Hz
Figura 4: Diagrama de blocos do TCA 875
3
2.3 Tensao de controle
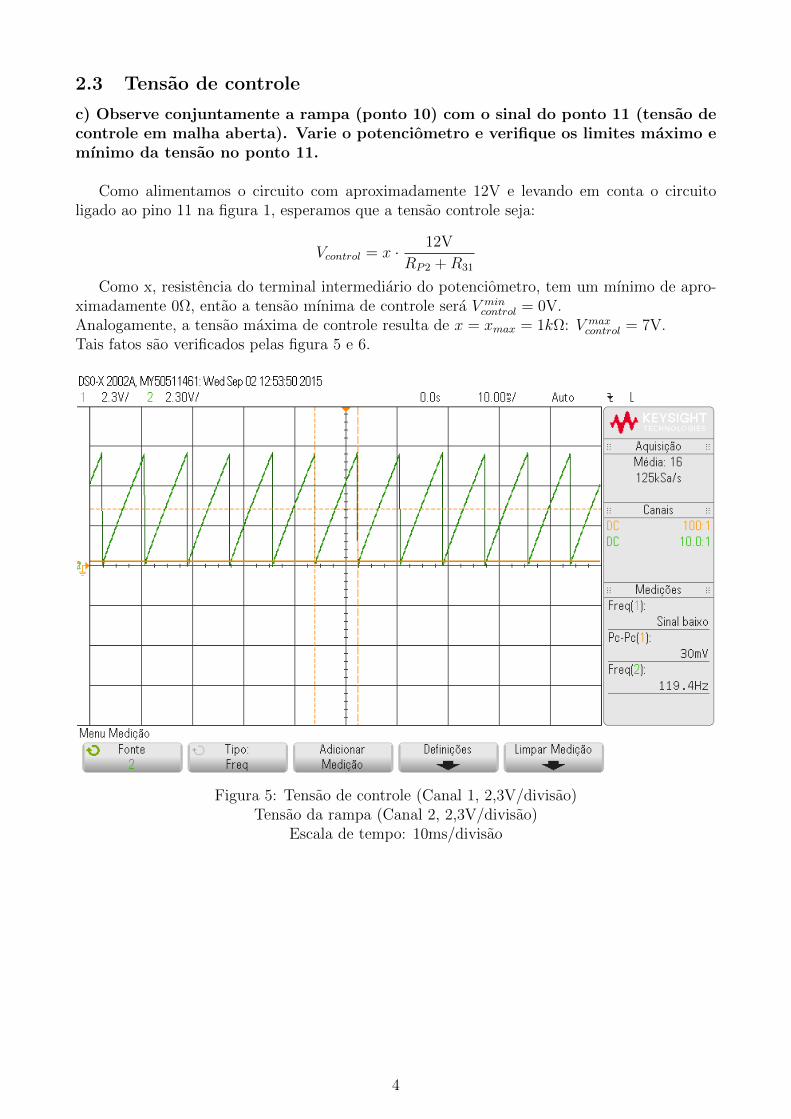
c) Observe conjuntamente a rampa (ponto 10) com o sinal do ponto 11 (tensao decontrole em malha aberta). Varie o potenciometro e verifique os limites maximo emınimo da tensao no ponto 11.
Como alimentamos o circuito com aproximadamente 12V e levando em conta o circuitoligado ao pino 11 na figura 1, esperamos que a tensao controle seja:
Vcontrol = x · 12V
RP2 +R31
Como x, resistencia do terminal intermediario do potenciometro, tem um mınimo de apro-ximadamente 0Ω, entao a tensao mınima de controle sera V min
control = 0V.Analogamente, a tensao maxima de controle resulta de x = xmax = 1kΩ: V max
control = 7V.Tais fatos sao verificados pelas figura 5 e 6.
Figura 5: Tensao de controle (Canal 1, 2,3V/divisao)Tensao da rampa (Canal 2, 2,3V/divisao)
Escala de tempo: 10ms/divisao
4

Figura 6: Tensao de controle (Canal 1, 2,3V/divisao)Tensao da rampa (Canal 2, 2,3V/divisao)
Escala de tempo: 10ms/divisao
V maxcontrol ≈ 6, 9V
V mincontrol ≈ 0V
2.4 Trimpot
Varie o trimpot e explique sua influencia sobre a rampa. Explique como e geradaesta rampa. Ajuste uma tensao de pico da rampa que seja menor do que a maximatensao de controle (ponto 11).
Conforme ja explicado no subcapıtulo 2.2, a resistencia controla a corrente de carregamentoda capacitancia. No nosso caso, essa resistencia e um trimpot, entao ele tera um influenciadireta na fonte de corrente. Logo, pela equacao seguinte:
dvcapdt
=i
C(1)
O trimpot tambem tera uma influencia direta na inclinacao de subida da rampa.A tensao da rampa e forcada a zero pelo transistor de descarregamento na passagem por zeroda tensao de entrada, ja explicado no subcapıtulo 2.2. Do zero, a rampa tera um crescimentode tensao conforme descrito pela equacao 1 ate a proxima passagem por zero da tensao deentrada.A figura 7 ilustra o pico da rampa inferior ao valor maximo da tensao de controle.
5

Figura 7: Tensao de controle (Canal 1, 2,3V/divisao)Tensao da rampa (Canal 2, 2,3V/divisao)
Escala de tempo: 10ms/divisao
2.5 Pulsos de saıda
e) Pulsos de saıda (pontos 14 e 15). Observe cada uma destas saıdas conjun-tamente com a rampa (ponto 10). Varie o potenciometro e veja a alteracao noangulo de disparo. Estes sinais, apos amplificacao pelos transistores, sao aplicadosaos transformadores de pulso, cujos secundarios estao ligados entre gate e catododos tiristores.
Ajustamos a tensao de controle para a metade da rampa. Os pulsos de saıda sobrepostos arampa sao ilustrados pelas figuras 8 e 9.Notamos que os pulsos da saıda 14 e 15 sao alternados, o que ja era de se esperar pela alternanciadevido a polaridade da tensao de sincronismo. Logo, a cada semiciclo da senoide, um par detiristores sera acionado para a retificacao.O angulo α de acionamento dependara da tensao de controle. Como a inclinacao da rampa econstante, o angulo sera diretamente proporcional a tensao de controle.
6
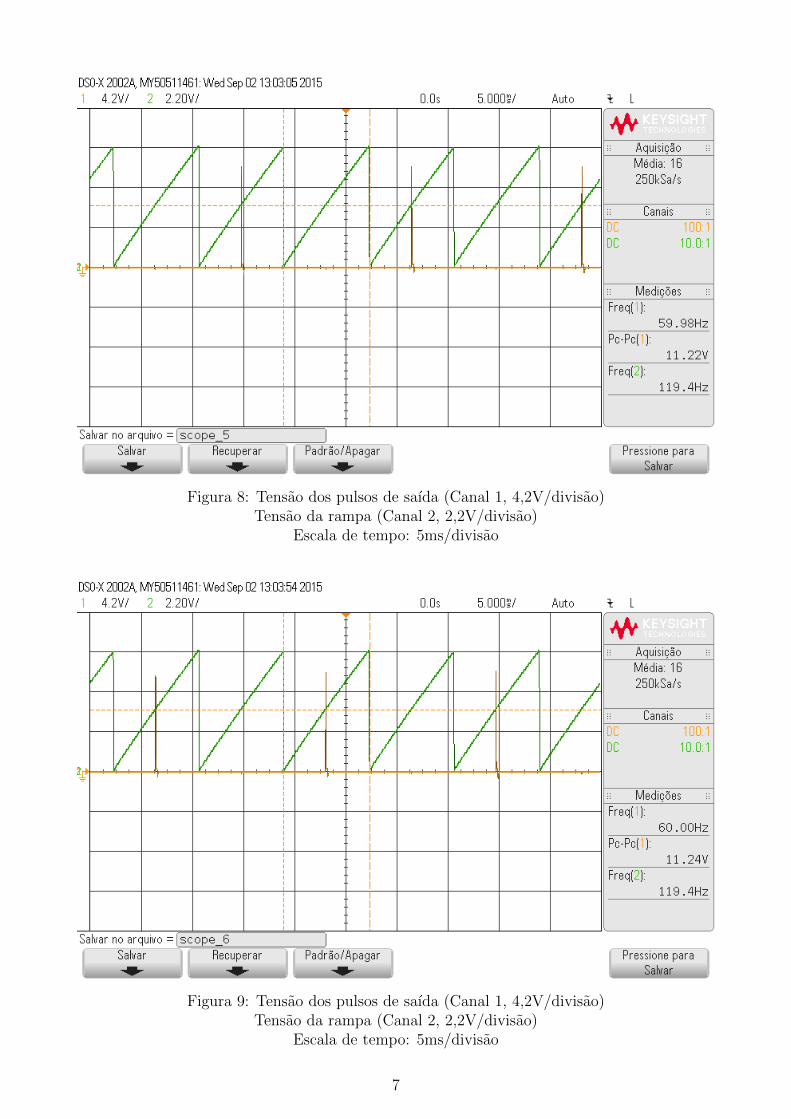
Figura 8: Tensao dos pulsos de saıda (Canal 1, 4,2V/divisao)Tensao da rampa (Canal 2, 2,2V/divisao)
Escala de tempo: 5ms/divisao
Figura 9: Tensao dos pulsos de saıda (Canal 1, 4,2V/divisao)Tensao da rampa (Canal 2, 2,2V/divisao)
Escala de tempo: 5ms/divisao
7
3 Medida com carga resistiva
Ajuste o potenciometro para a maxima tensao no ponto 11 (maximo angulo dedisparo). Conecte a lampada nos terminais da carga.
3.1 Pulsos de disparo e corrente de linha
a) Observe simultaneamente os pontos 15 (pulso de disparo) e 7 (corrente de linha).Varie a tensao de controle (potenciometro). Anote e comente.
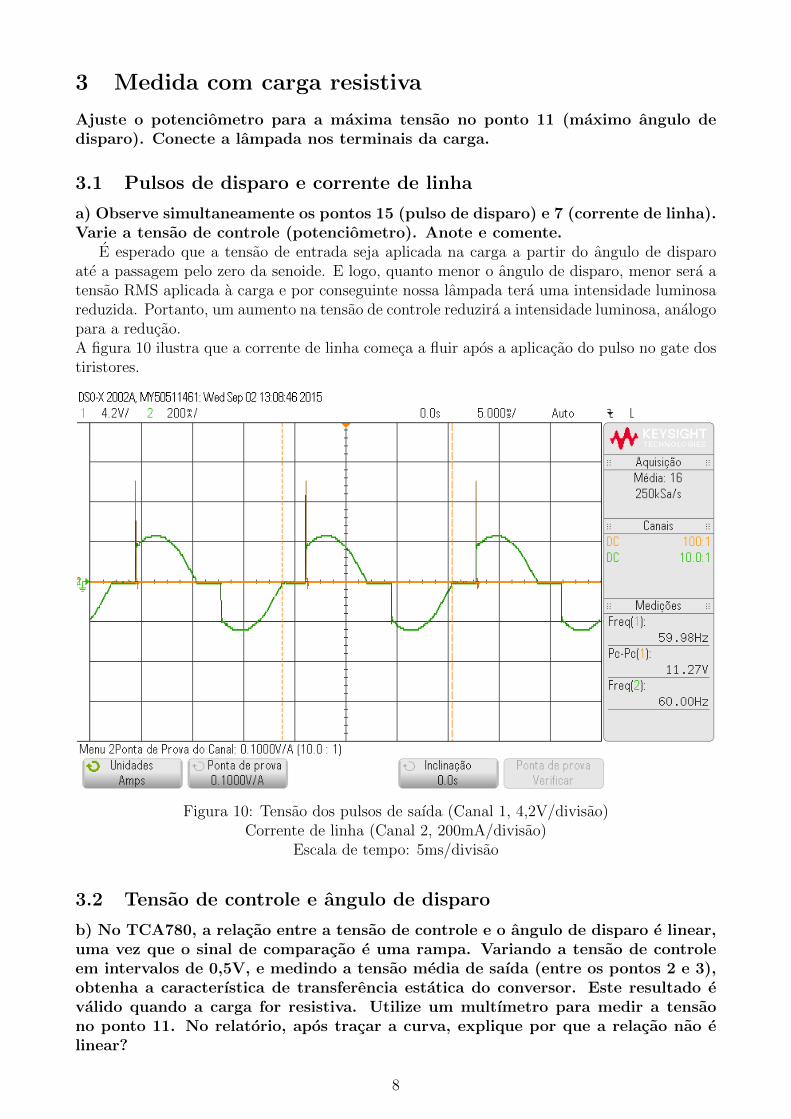
E esperado que a tensao de entrada seja aplicada na carga a partir do angulo de disparoate a passagem pelo zero da senoide. E logo, quanto menor o angulo de disparo, menor sera atensao RMS aplicada a carga e por conseguinte nossa lampada tera uma intensidade luminosareduzida. Portanto, um aumento na tensao de controle reduzira a intensidade luminosa, analogopara a reducao.A figura 10 ilustra que a corrente de linha comeca a fluir apos a aplicacao do pulso no gate dostiristores.
Figura 10: Tensao dos pulsos de saıda (Canal 1, 4,2V/divisao)Corrente de linha (Canal 2, 200mA/divisao)
Escala de tempo: 5ms/divisao
3.2 Tensao de controle e angulo de disparo
b) No TCA780, a relacao entre a tensao de controle e o angulo de disparo e linear,uma vez que o sinal de comparacao e uma rampa. Variando a tensao de controleem intervalos de 0,5V, e medindo a tensao media de saıda (entre os pontos 2 e 3),obtenha a caracterıstica de transferencia estatica do conversor. Este resultado evalido quando a carga for resistiva. Utilize um multımetro para medir a tensaono ponto 11. No relatorio, apos tracar a curva, explique por que a relacao nao elinear?
8

A relacao nao e linear, pois a tensao media nao varia linearmente com o angulo de disparo:
Vsaida =Vp2π
(∫ π
α
sin(x)dx−∫ 2π
π+α
sin(x)dx
)Desenvolvendo a expressao:
Vsaida =Vp2π
(− cos(π) + cos(α) + cos(2π)− cos(π + α)) =Vpπ
(1 + cos(α))
Como α = a+ b · vcontrol:
Vsaida =Vpπ
(1 + cos(a+ b · vcontrol))
Usando mınimos quadrados em cos−1(πVp· Vsaida − 1
)× vcontrol, obtemos os valores de a e
b:
a = 0.201
b = 0.437 V−1
0 1 2 3 4 5 6 70
20
40
60
vcontrol
Vsaida
ExperimentalTeorico
Figura 11: Grafico mostrando a relacao de transferencia estatica do conversor
Vemos pela figura 11, que o modelo teorico proposto se encaixa no resultado experimentalobtido. Validamos, portanto, o modelo.
4 Carga RLE
4.1 Operacao em Malha Aberta
c) Observe simultaneamente a tensao (ponto 2) e a corrente (ponto 3) (coloque areferencia dos canais do osciloscopio no ponto 6) sobre a carga. Anote e comente asdiferentes formas de onda que se observa para velocidades de 400, 1800 e 3600 rpm(ou a maxima velocidade que conseguir ajustar). Verifique o angulo de disparo emcada caso. O angulo de disparo e medido em relacao ao cruzamento por zero datensao de alimentacao.
9
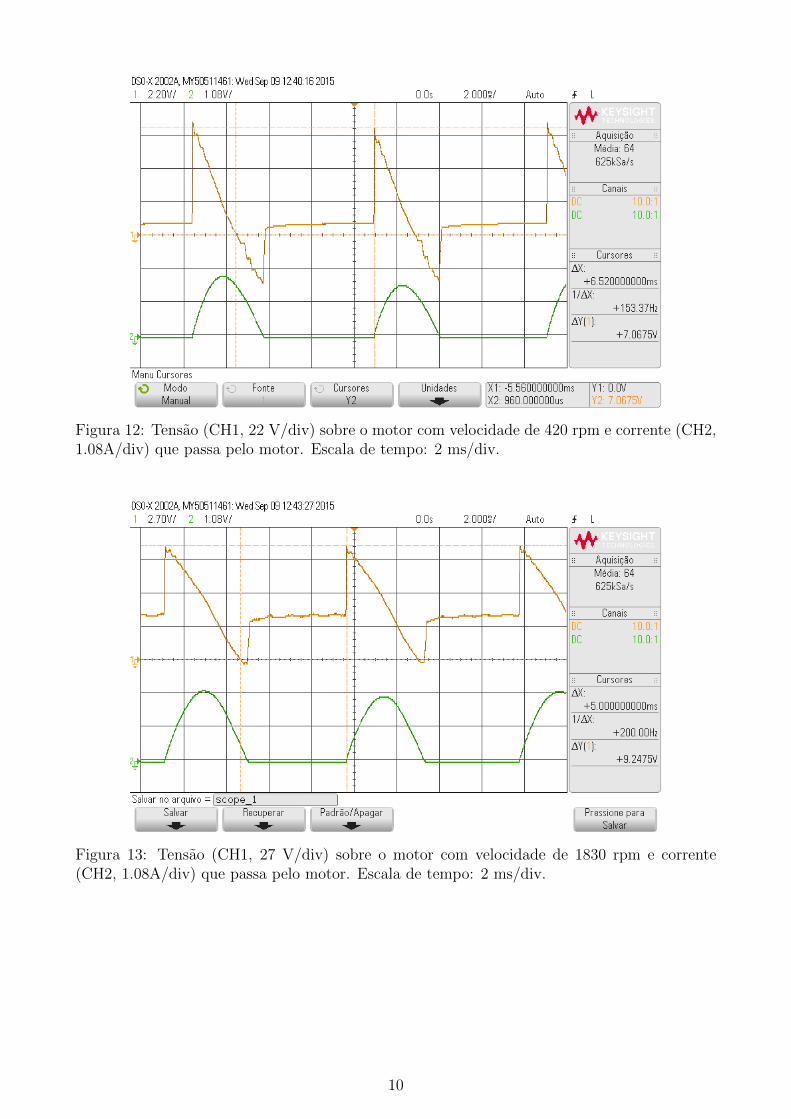
Figura 12: Tensao (CH1, 22 V/div) sobre o motor com velocidade de 420 rpm e corrente (CH2,1.08A/div) que passa pelo motor. Escala de tempo: 2 ms/div.
Figura 13: Tensao (CH1, 27 V/div) sobre o motor com velocidade de 1830 rpm e corrente(CH2, 1.08A/div) que passa pelo motor. Escala de tempo: 2 ms/div.
10
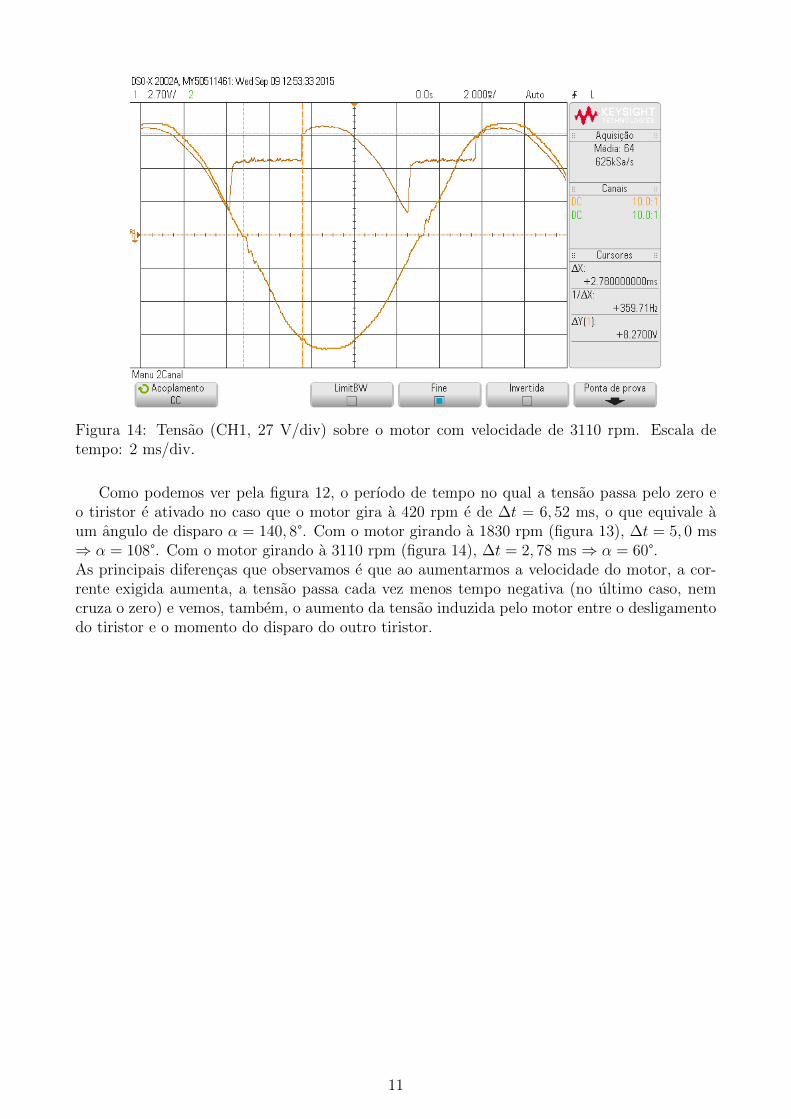
Figura 14: Tensao (CH1, 27 V/div) sobre o motor com velocidade de 3110 rpm. Escala detempo: 2 ms/div.
Como podemos ver pela figura 12, o perıodo de tempo no qual a tensao passa pelo zero eo tiristor e ativado no caso que o motor gira a 420 rpm e de ∆t = 6, 52 ms, o que equivale aum angulo de disparo α = 140, 8°. Com o motor girando a 1830 rpm (figura 13), ∆t = 5, 0 ms⇒ α = 108°. Com o motor girando a 3110 rpm (figura 14), ∆t = 2, 78 ms ⇒ α = 60°.As principais diferencas que observamos e que ao aumentarmos a velocidade do motor, a cor-rente exigida aumenta, a tensao passa cada vez menos tempo negativa (no ultimo caso, nemcruza o zero) e vemos, tambem, o aumento da tensao induzida pelo motor entre o desligamentodo tiristor e o momento do disparo do outro tiristor.
11
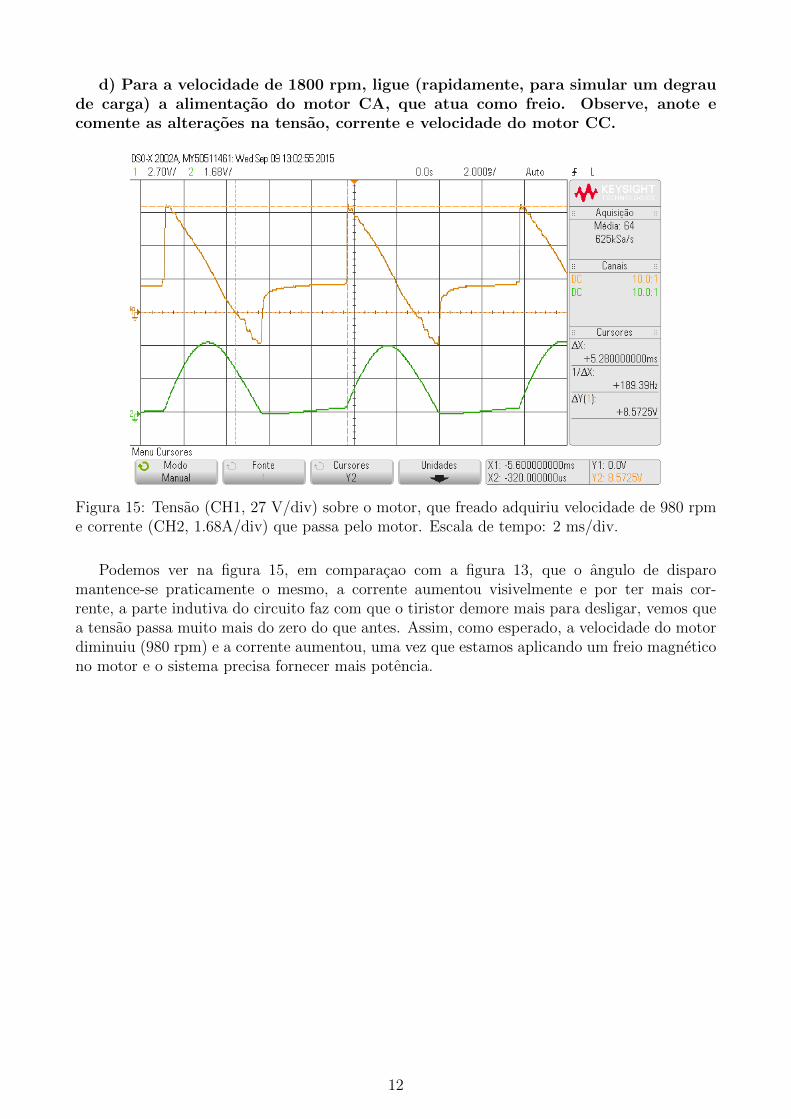
d) Para a velocidade de 1800 rpm, ligue (rapidamente, para simular um degraude carga) a alimentacao do motor CA, que atua como freio. Observe, anote ecomente as alteracoes na tensao, corrente e velocidade do motor CC.
Figura 15: Tensao (CH1, 27 V/div) sobre o motor, que freado adquiriu velocidade de 980 rpme corrente (CH2, 1.68A/div) que passa pelo motor. Escala de tempo: 2 ms/div.
Podemos ver na figura 15, em comparacao com a figura 13, que o angulo de disparomantence-se praticamente o mesmo, a corrente aumentou visivelmente e por ter mais cor-rente, a parte indutiva do circuito faz com que o tiristor demore mais para desligar, vemos quea tensao passa muito mais do zero do que antes. Assim, como esperado, a velocidade do motordiminuiu (980 rpm) e a corrente aumentou, uma vez que estamos aplicando um freio magneticono motor e o sistema precisa fornecer mais potencia.
12

e) Coloque o osciloscopio na saıda analogica do tacometro (a referencia e oponto 0). Utilize uma base de tempo longa que permita observar o comportamentotransitorio da velocidade. Comente os resultados.
Figura 16: Tensao (CH1, 1.0 V/div) de controle e tensao (CH2, 1.0 V/div) sobre a saıda dotacometro. Escala de tempo: 1 s/div.
O momento da queda de tensao sobre o tacometro na figura 16 e exatamente o momentoque ligamos o freio. Assim, ao ligarmos o freio a velocidade do motor diminui, o que e traduzidopor uma diminuicao de tensao na saida do tacometro.
13

4.2 Operacao em Malha Fechada
b) Observe simultaneamente os sinais nos pontos 8 (referencia de velocidade) e notacometro (-), em relacao ao ponto 0. A tensao do tacometro deve ser negativa.Varie a referencia ate a velocidade estabilizar em 1800rpm.
Figura 17: Tensao (CH1, 1.0 V/div) de controle e tensao (CH2, 1.0 V/div) sobre a saıda dotacometro. Escala de tempo: 1 s/div.
Como agora temos um controle em malha fechada de velocidade, vemos que a velocidadedo motor e constante, mas o sistema muda o angulo de disparo do tiristor para fazer isso. Avelocidade do motor se estabiliza em 2300 rpm.
14
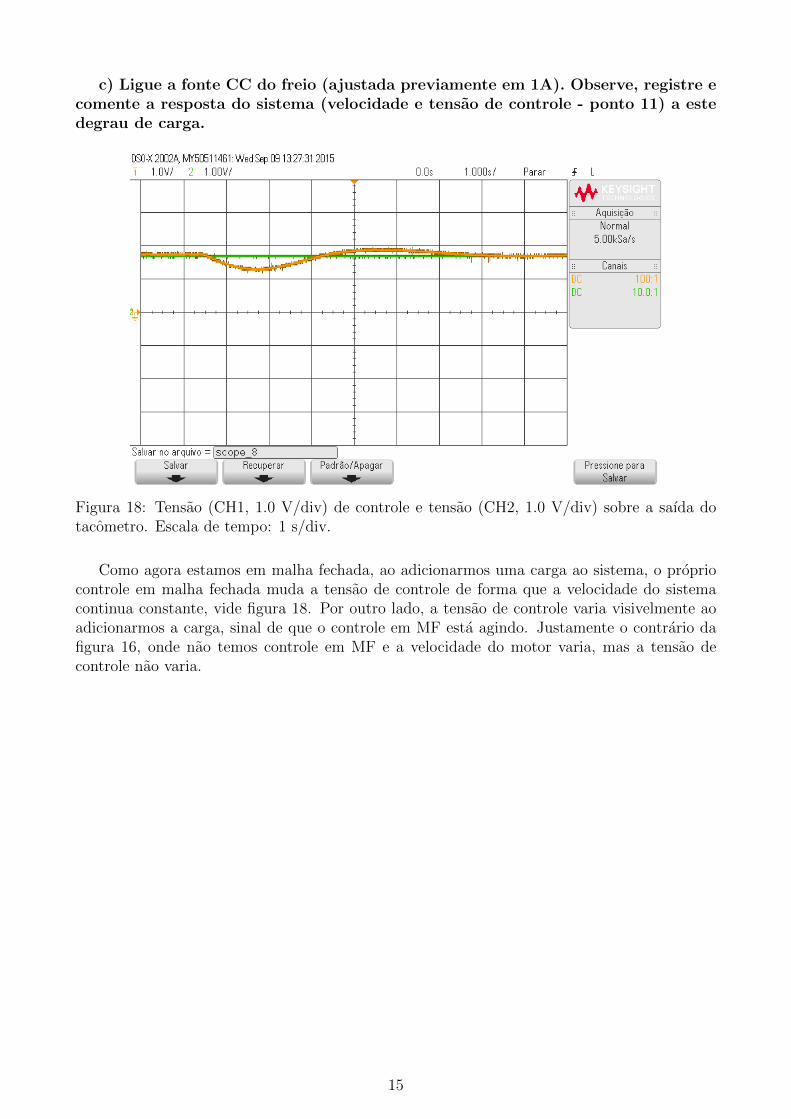
c) Ligue a fonte CC do freio (ajustada previamente em 1A). Observe, registre ecomente a resposta do sistema (velocidade e tensao de controle - ponto 11) a estedegrau de carga.
Figura 18: Tensao (CH1, 1.0 V/div) de controle e tensao (CH2, 1.0 V/div) sobre a saıda dotacometro. Escala de tempo: 1 s/div.
Como agora estamos em malha fechada, ao adicionarmos uma carga ao sistema, o propriocontrole em malha fechada muda a tensao de controle de forma que a velocidade do sistemacontinua constante, vide figura 18. Por outro lado, a tensao de controle varia visivelmente aoadicionarmos a carga, sinal de que o controle em MF esta agindo. Justamente o contrario dafigura 16, onde nao temos controle em MF e a velocidade do motor varia, mas a tensao decontrole nao varia.
15

d) Desligue o motor e a carga (fonte CC). Troque o resistor Rf por um de 10k(o que diminui o ganho proporcional). Repita o procedimento anterior. Observe,registre e comente a resposta do sistema (velocidade e tensao de controle - ponto11) a este degrau de carga.
Figura 19: Tensao (CH1, 1.0 V/div) de controle e tensao (CH2, 1.0 V/div) sobre a saıda dotacometro. Escala de tempo: 1 s/div.
Ao diminuirmos o ganho proporcional, o ajuste no controle varia muito mais lentamente edessa forma, oscila menos. Observamos que o resultado final de manter a velocidade constante(o sistema controlado) ao adicionarmos a carga e praticamente a mesma do item anterior comganho proporcional maior.
16