Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE SÃO CARLOSCENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA
DEPARTAMENTO DE COMPUTAÇÃO
Grupo de Estudo e Desenvolvimento em Automação Industrial
MICRO CONTROLE: UM CONTROLE DE TRAJETÓRIA DE UM VEÍCULO AUTÔNOMO COM GUIA ÓTICA
Moreira, AndersonMarsolla, Rafael
SÃO CARLOS, 2007

SUMÁRIO
1 – RESUMO....................................................................................................................3
2 – INTRODUÇÃO...........................................................................................................4
3 – DESENVOLVIMENTO................................................................................................63.1 – A ARQUITETURA E SEUS COMPONENTES..............................................................................................63.2 – O ALGORITMO DE CONTROLE...................................................................................................................63.3 – CODIFICAÇÃO DO ALGORITMO DE CONTROLE....................................................................................8
4 – CONCLUSÃO E CONSIDERAÇÕES FINAIS............................................................9
5 – Bibliografia..............................................................................................................10

1 – RESUMO
O Grupo de Estudo e Desenvolv imento em Automação Industr ia l – GEDAI – é um grupo organ izado por a lunos de graduação dos cursos de Engenhar ia de Computação, C iência da Computação e F ís ica , da Univers idade Federal de São Car los- UFSCar . O Objet ivo do grupo é estudar técnicas e desenvolver so luções para o apoio à automação industr ia l . O pro jeto atual do grupo contempla a construção de um veículo auto-guiado para t ransporte de mater ia l em ambiente industr ia l . O veículo é superv is ionado remotamente para possíve l integração com os demais e lementos do chão de fábr ica .
Este t rabalho apresenta um controle de tra jetór ia para veículos autônomos guiados por t ração d i ferencia l . O contro le é baseado no reconhecimento de guias ot icamente não-refletoras, posic ionadas sobre um solo p lano e de boa reflexão. A detecção da tra jetór ia é fe i ta bas icamente por sensores inf ravermelhos al inhados e acoplados na parte infer ior do veículo .
O estado dos sensores é adquir ido por uma arquitetura baseada em um microcontro lador da famí l ia ATMEL, que processa a informação do estado do sensor (se dentro ou fora da fa ixa) e informa a veloc idade correta pra cada motor. A ve loc idade final do veículo é a l terada, proporc ionando a d i ferença de t ração necessár ia para que o ve ículo pross iga seguindo sua tra jetór ia correta, indicado pela fa ixa.
Para a definição do a lgor i tmo de controle, real izou-se uma pesquisa em torno do tema, procurando propostas de técnicas de contro le , a lgor i tmos e arranjos mecânicos já ex istentes .
O algor i tmo de controle fo i implementado em l inguagem C e usando o software µVis ion2 V2.40, da Kei l Sof tware, Inc.
Para os testes do a lgor i tmo, constru iu-se uma base mecânica, composta por 2 motores de corrente cont ínua l igados independentemente a cada uma das rodas t rac ionadas e mais um roda l ivre, apenas para apoio.
Os resultados exper imenta is obt idos na p lataforma de testes foram focados bas icamente nos erros de tra jetór ia.


2 – INTRODUÇÃO
A robót ica é uma área do saber que conjuga conhecimentos de engenhar ia mecânica, como sejam a estát ica e a d inâmica, de matemát ica com a descr ição do movimento no espaço, de engenhar ia e lect rotécnica com o pro jecto de sensores e inter faces para os robôs , da teor ia do controlo com o projecto de a lgor i tmos para que o robô rea l ize os movimentos desejados e a inda da informát ica com a programação de todos os a lgor i tmos desenvolv idos por forma a real izar a tarefa desejada.
Apesar de muitos destes conhecimentos já serem ant igos e bem estabelec idos, a robót ica é um campo re lat ivamente recente.
Um robô industr ia l é um manipulador programável , mult i func ional , pro jetado para mover mater ia is , peças, ferramentas ou d ispos i t ivos especia is em movimentos var iáveis programados para a rea l ização de uma var iedade de tarefas .
Dentre os robôs industr ia is , um de grande destaque é o Veículo Autônomo Guiado, mais comumente conhecido como AGV (Auto Guide Vehic le) . Os AGVs são veículos responsáveis pela logíst ica de uma fábr ica automat izada. São embarcados com di ferentes t ipos de equipamentos e letrônicos e computacionais , responsáveis por guiá- los por suas rotas.
Neste pro jeto , o intu i to é reproduzi r um protót ipo inte i ro de um AGV guiado por sensores infravermelho, que segue uma l inha. Para tanto, buscou-se fac i l i tar a parte mecânica e de sensor iamento do veículo , afim de que o hardware embarcado fosse menos complexo de ser desenvolv ido.Especificamente, a função do Microcontrole é oferecer capacidade e inte l igência computacional suficiente para que o ve ículo torne-se autônomo, auto-guiado e apresente um bom desempenho ao desenvolver suas rotas .
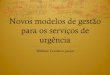
O protót ipo é composto por sensores de infravermelho, responsáveis por adquir i r o estado uma carenagem mecânica, desenvolv ida nos pr inc íp ios da tração d i ferencia l . I sto quer d izer que o robô é const i tu ído por uma base, onde 2 motores

independentes são acoplados em rodas independentes e , por fim, uma “ roda boba ” para s imples apoio.
A figura abaixo i lustra a modelagem matemát ica s imples para um robô de tração di ferencia l :
A idé ia bás ica é que os sensores adqui ram o estado do veículo (se dentro ou fora da fa ixa, e se fora, pra qual lado sa iu) enviem essas informações para o microcontro lador, que as processará e decid i rá o quanto e como corr ig i r a rota. Se for necessár io v i rar , um d i ferencia l de t ração nas rodas é informado pelos motores, e o ve ículo atuará em sua correção.
Diferencial de Tração e Velocidade

Um di ferencia l de t ração pode ser obt ido var iando as ve loc idade de cada motor, para que isto aconteça é necessár io que a tensão (corrente) nos terminais de cada motor dc também var iem. Para obter ta l var iação de tensão fo i esco lh ido a técnica de pwm, note que está técnica é fac i lmente implementável em dispos i t ivos d ig i ta is , ta l como o microcontro lador.
A modulação PWM (modulação por largura de pulso), cons is te bas icamente em apl icar uma onda quadrada de ampl i tude Vcc e f reqüência a l ta no lugar da tensão cont inua (Vcc) . A tensão média var ia em função do tempo que onda fica em níve l a l to (Vcc) e do tempo que onda fica em níve l baixo (0V) .
A re lação entre o tempo que a onda fica em níve l a l to e o per íodo tota l é conhecido como Duty Cycle . O Duty Cycle é normalmente expresso em percentual . Ou se ja , para uma modulação PWM com Duty Cycle igual a 50% , metade do tempo a tensão fica em níve l a l to (Vcc) e metade em níve l baixo (0V) .
A ve loc idade do motor var ia proporc ionalmente à área debaixo da porção pos i t iva de cada per íodo.
O Duty Cycle ca lculado é dado por:
Onde :
DCc = Duty Cyc le ca lcu lado (%)TH = Pe r íodo em n íve l a l to (ms )
T = Per í odo to ta l (ms )
Uma modulação PWM de ampl i tude 12V e Duty Cycle de 50% produz o mesmo efe i to de uma tensão cont inua de ampl i tude 6V, is to porque a tensão média nos do is casos é 6V.

A grande vantagem do PWM está no fato de se poder var iar a tensão média apl icada em um dispos i t ivo DC ut i l izando apenas uma saída d ig i ta l , que é bem mais barata e s imples que uma saída analóg ica em qualquer contro lador. A desvantagem pr inc ipa l é o ru ído sonoro provocado pelo fato da f reqüência de comutação estar perto da f reqüência audível .
O c i rcui to desenvolv ido para controlar motores DC ut i l iza a modulação PWM no controle da tensão de sa ída. É importante sal ientar que embora ap l icado para o controle de motores , nada impede que este c i rcui to se ja ut i l i zado para ac ionar outro t ipos de d ispos i t ivos DC, como por exemplo valvulas solenoídes.
3 – DESENVOLVIMENTO
3.1 – A ARQUITETURA E SEUS COMPONENTES
Essa escopo do projeto é bas icamente responsável por estruturar a arquitetura do Robô e desenvolver a lgor i tmos para seu controle .
A arquitetura é composta por um microcontrolador ATMEL modelo AT89S52, sensores infravermelhos compostos por d iodos emissores de luz e fototransístors, c i rcui tos comparadores e c i rcui tos d iv isores de tensão.
Aqui será demonstrado especificamente o módulo do microcontrolador, sendo os c i rcui tos dos sensores e demais componentes encontrados nos outros documentos do projeto tota l .
< mostrar figura com o c i rcui to do microcontro lador >< deta lhar melhor os componentes usados na
arquitetura>

3.2 – O ALGORITMO DE CONTROLE
Diversas são as formas de tentar -se resolver o prob lema de contro le descr i to até agora. A lgor i tmos d iversos, baseados em grandes redes de sensores são propostos por mui tos estudiosos da área (maiores informações consulte a b ib l iografia), ou até mesmo algor i tmos sofist icados usando câmeras e com reconhecimento de espaço, todavia, o objet ivo desde a lgor i tmo é resultar num aceitável controle de tra jetór ia com apenas do is sensores infravermelho.
Ass im, para o seu desenvolv imento, anal isou-se quais ser iam as possíve is informações que os sensores poder iam recolher. De uma forma qual i tat iva, podemos dizer que os sensores nos retornarão DENTRO ou FORA da fa ixa, se sa iu o sensor ESQUERDO ou o sensor DIREITO.
Numa anál ise s impl is ta, é fác i l perceber que os sensores nos retornarão o estado atual do veículo e , ass im, o microcontrolador terá as in formações necessár ias para decid i r como atuar nos motores e corr ig i r a rota .
A modelagem desse algor i tmo fo i desenvolv ida em c ima da teor ia da Maquina de Moore. I sto porque há uma grande proximidade com modelo real , já que suas sa ídas são determinadas pelo estado corrente, e não pela t ransição dos estados. Abaixo encontra-se a definição da máquina de estados de Moore M:
Definição formal da Máquina de Moore “M”M = (Q, Σ, Δ, δ, λ, q0) tal que:
Q = {[Todos_Dentro], [Saiu_Esquerdo], [Saiu_Direito], [Todos_Fora]}
Σ = {Sensor_Esq_DENTRO, Sensor_Esq_FORA, Sensor_Dir_DENTRO, Sensor_Dir_FORA, Todos_DENTRO}
Δ = {Não_corrige, Corrige_esquerdo, Corrige_direito, Para_motores}
q0 = Todos_Dentro
λ = funções que mapeiam a saída
Δ = funcões que mapeiam a transição dos estados

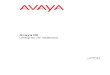
Para fac i l i tar o entendimento do a lgor i tmo, v isua l ize o d iagrama de estados abaixo:
De posse do d iagrama, torna-se mais fác i l v isua l izar o comportamento que o a lgor i tmo tem. Uma vez in ic iada a t ra jetór ia do veículo, o estado in ic ia l é TODOS_DENTRO, indicando que todos os sensores estão dentro da fa ixa guia e não é prec iso que o microcontrolador atue sobre os motores , corr ig indo-os . Por exemplo, estando nesse estado e, ao ler-se o sensor DIREITO e obter a resposta SENSOR_DIR_FORA, ocorre uma t rans ição para o estado SAIU_DIREITO e a resposta ao s istema é CORRIGIR_DIREITO.
Essa resposta induz o microcontro lador a corr ig i r a rota , reduzindo a ve loc idade do motor ESQUERDO e aumentando a ve loc idade do motor DIREITO. Se o d i ferencia l proposto não trazer o veículo para a rota correta, e a le i tura do estado cont inuar em SAIU_DIREITA, o a lgor i tmo se responsabi l i za em aumentar um pouco mais o d i ferencia e, cont inua ass im, ate t razer o veículo para a rota correta TODOS_DENTRO.

Essa proposta de so lução deve ser encarada para todos os demais estados do d iagrama, sa lvo o estado TODOS_FORA, onde a decisão de parar o ve ículo deve ser tomada para evi tar-se ac identes.
3.3 – CODIFICAÇÃO DO ALGORITMO DE CONTROLE
Desenvolver esse a lgor i tmo em assembly ser ia possíve l , todavia acarretar ia uma perda de tempo e desgaste cons iderável ao projeto. Por isso, dec id iu -se usar uma l inguagem de al to n íve l , o C, e uma IDE capaz de traduzir o código em C para cód igo assembly e gerar o arquivo necessár io para a gravação no microcontrolador.
A ferramenta esco lh ida fo i o sof tware µVis ion2 V2.40, da Kei l Software, Inc. Este sof tware traz uma enorme fac i l idade na manipulação de códigos para microcontro lador e torna o desenvolv imento mais agradável .
O código completo encontrasse no apêndice deste documento.
4 – Conclusão e Considerações Finais
Para o a lgor i tmo proposto, observou-se uma v is íve l melhora no controle em re lação ao algor i tmo “on-off”, aquele onde a d i ferença de tração para correção da rota é dada pelo desl igamento total de um dos motores do veículo . Esta melhora é devido ao ganho proporc ional que acontece de tempo em tempo, ass im, corr ige-se menos em retas e mais em curvas. Podemos dizer que, pr imi t ivamente, o ve ículo consegue se adaptar e perceber curvas e retas.
Entretanto, os a justes das var iáveis foram empír icos e , por sua vez, acarretaram muita d ificu ldade e incerteza sobre os resultados. Na verdade, o correto ser ia medir especificamente a ve loc idade dos motores , o eixo do veículo e calcular , fis icamente, o quanto dever ia ser o ganho. Esse calculo na prát ica não exist iu! Um valor aproximado fo i est ipulado, e através do empir ismo o a lgor i tmo fo i a justado.

Como resul tado, para uma configuração de var iáveis cons iderada “acei tável” , o ve ículo apresentou melhor comportamento em curva do que em reta , devido à resposta do s is tema mecânico.
Entretanto, podemos conclu ir que o s is tema mecânico instável acarretou dúvidas sobre o funcionamento ót imo do algor i tmo.
Por fim é vá l ido d izer que é esperado desse projeto um melhor s istema mecânico para que, futuramente, melhor ias em algor i tmos possam ser implementadas.
5 – Bibliografia