Embed Size (px)
DESCRIPTION
Tese de mestrado sobre as superfícies máximas no pseudo-espaço de Lorentz-Minkowski e suas relações com as superfícies mínimas no espaço euclidiano.
Citation preview

1
ISMAEL TEIXEIRA DA SILVA
GEOMETRIA DAS SUPERFÍCIES MÍNIMAS EM 3 E SUPERFÍCIES MÁXIMAS
TIPO ESPAÇO EM L3.
(Dissertação apresentada à Universidade Vale do Rio Verde – UNINCOR como parte das
exigências do Programa de Mestrado em Matemática e Estatística, área de concentração Geometria
Diferencial, para obtenção do título de Mestre em Matemática e Estatística.)
Orientador:
Prof. Dr. Irwen Valle Guadalupe
Três Corações
2007

2
SUMÁRIO
Página
RESUMO........................................................................................................................... 4
ABSTRACT....................................................................................................................... 4
INTRODUÇÃO................................................................................................................. 5
1 PRELIMINARES ........................................................................................................... 7
2 ESPAÇO TRIDIMENSIONAL EUCLIDIANO R3 ....................................................... 11
3 ESPAÇO VETORIAL DE LORENTZ-MINKOWSKI L3.............................................. 13
3.1 Norma e base ortonormal ..............................................................................................14
3.2 Cone tipo tempo ........................................................................................................... 15
3.3 O produto vetorial no espaço L3 .................................................................................. 18
4 GEOMETRIA DIFERENCIAL DE SUPERFÍCIES TIPO ESPAÇO EM R3 E L3 ......... 20
4.1 O plano tangente .......................................................................................................... 25
4.2 O vetor normal unitário ................................................................................................. 26
4.3 A primeira forma fundamental ....................................................................................... 30
5 A APLICAÇÃO NORMAL DE GAUSS E A SEGUNDA FORMA FUNDAMENTAL 34
5.1 A geometria da aplicação normal de Gauss ................................................................... 34
5.2 Curvatura normal e curvaturas principais ....................................................................... 40
5.3 A curvatura Gaussiana e a curvatura média em coordenadas locais ................................ 42
6 LINHAS DE CURVATURA E LINHAS ASSINTÓTICAS ........................................... 49
7 SUPERFÍCIES MÍNIMAS EM R3 E MÁXIMAS TIPO ESPAÇO EM L3 .................... 54
7.1 Catenóides ................................................................................................................... 56
7.1.1 Catenóide em R3. ..................................................................................................... 57
7.1.2 Catenóide de primeiro tipo em L3. ............................................................................ 61
7.1.3 Catenóide de segundo tipo em L3. ............................................................................ 65
7.1.4 Catenóide de terceiro tipo em L3. ............................................................................. 69
7.2 Helicóides .................................................................................................................... 71
7.2.1 Helicóide em R3. ...................................................................................................... 71
7.2.2 Helicóide de primeiro tipo em L3. ............................................................................. 75
7.2.3 Helicóide de segundo tipo em L3. ............................................................................. 78
7.2.4 Helicóide de terceiro tipo em L3. .............................................................................. 81
7.3 Superfícies de Enneper ................................................................................................. 82
7.3.1 Superfície de Enneper em R3. ................................................................................... 82
7.3.2 Superfície de Enneper de primeiro tipo em L3. .......................................................... 86
7.3.3 Superfície de Enneper conjugada de primeiro tipo em L3. .......................................... 89
7.3.4 Superfície de Enneper de segundo tipo em L3. .......................................................... 92

3
7.3.5 Superfície de Enneper conjugada de segundo tipo em L3. ......................................... 95
7.3.6 Superfície de Enneper de terceiro tipo em L3. ........................................................... 98
7.4 SUPERFÍCIES DE SCHERK ..................................................................................... 99
7.4.1 Superfície de Scherk em R3. ..................................................................................... 99
7.4.2 Superfície de Scherk de primeiro tipo em L3. ........................................................... 102
7.4.3 Superfície de Scherk de segundo tipo em L3. ........................................................... 106
7.4.4 Superfície de Scherk de terceiro tipo em L3. ............................................................ 107
8 GEOMETRIA COM O SOFTWARE MATHEMATICA ............................................. 109
8.1 Geometria das superfícies no espaço tridimensional de Lorentz Minkowski - L³............ 109
8.2 Deformação isométrica do helicóide em catenóide em L³.............................................. 112
CONCLUSÃO ................................................................................................................ 114
BIBLIOGRAFIA ............................................................................................................. 116

4
RESUMO
O objetivo deste trabalho é estudar inicialmente a geometria das superfícies mínimas no espaço
Euclidiano R3. Paralelamente será feito o mesmo estudo para as superfícies máximas tipo espaço
na métrica de Lorentz-Minkowski, L3. Após o estudo das aplicações de Gauss e a determinação
dos coeficientes da Primeira e Segunda Forma Fundamental, serão estudadas as curvaturas
gaussiana, média, normal e principais além das linhas de curvatura e assintóticas, comparando os
resultados obtidos para estas superfícies nos dois espaços. O software Mathematica será utilizado
como ferramenta com a finalidade de desenvolver uma rotina de programação que permita o
cálculo da geometria de qualquer superfície mínima em R3 e máxima em L3.
ABSTRACT
The aim of this work initially is to study the geometry of the minimal surfaces in the Euclidian
space R3. Similarly, it will be made the same study for the maximal spacelike surfaces in the
Lorentz-Minkowski space, L3. After studying the Gauss map and the determination of the
coefficients of the first and second fundamental form, the Gaussian, mean, normal and main
curvatures besides the asymptotic and curvature lines, will be studied, comparing the obtained
results for those surfaces in the two spaces. The Mathematica software will be used as tool with the
purpose to develop a programming routine that allows the calculation of the geometry of any
minimal surface in R3 and maximal in L3.

5
INTRODUÇÃO
A idéia de superfície mínima vem de 1760 com um problema proposto por Lagrange:
dada uma curva fechada simples C, qual a menor superfície que tem esta curva como fronteira?
Em 1762 Lagrange desenvolveu um algoritmo para o cálculo de variações que deu
lugar ao que hoje conhecemos por equação diferencial de Euler-Lagrange, onde tratou de
encontrar uma superfície de área mínima e contorno pré-fixado e como conseqüência estabeleceu a
equação que satisfaz o traço mínimo e cujas soluções definem o que conhecemos por superfícies
de curvatura média constante (nula no caso das superfícies mínimas).
f x, y : 1 fy2 fxx 2fxfyfxy 1 fx
2 fyy 0 7.1
Interessado mais em questões teóricas, Lagrange não se preocupou em encontrar
soluções concretas não triviais da equação (7.1). Foi Euler quem primeiro conseguiu rodar a curva
chamada catenária para se obter uma superfície mínima que chamou de alysseide, posteriormente
denominada catenóide por J. Plateau, cujas experiências em meados do século XIX que deram
uma nova importância às superfícies mínimas, quando imergiu arames moldados na forma de
curvas espaciais em uma solução de água, sabão e glicerina, percebendo que as superfícies
formadas pela fina película era a de menor área possível a ser formada por aquela determinada
curva (FIGURA 7.1), por ser a superfície que apresentava a menor energia potencial, resultado das
interações entre suas moléculas (DO CARMO, 2005)[6].
FIGURA 0.1 Superfície moldada por película de sabão.
Um novo desafio, então, surgiu para os matemáticos: provar os resultados
experimentais de Plateau, e a questão vaga proposta por Lagrange passou a ser conhecida por
"problema de Plateau " que consiste em determinar a menor superfície que cobre uma curva

6
fechada dada.
Este trabalho tem por objetivo fazer um estudo comparativo das superfícies mínimas
no espaço tridimensional euclidiano, 3 e de Lorentz-Minkowski, L3, também denominado
pseudo-espaço de Lorentz-Minkowski. Este último tem sua importância nas aplicações em Física,
onde sua maior expressão é na Teoria da Relatividade especial de Albert Einstein, onde é mais
comumente formulada. Nessa configuração as três dimensões usuais do espaço são combinadas
com uma única dimensão do tempo para formar uma variedade quadrimensional para representar
um espaço-tempo.
Inicialmente, define-se o espaço vetorial de um modo geral e algumas de suas
propriedades e logo após uma breve descrição do espaço tridimensional euclidiano 3 e do
pseudo-espaço tridimensional de Lorentz-Minkowski, L3.
Após esta breve descrição, inicia-se um estudo da geometria diferencial das
superfícies mínimas em 3 e máximas tipo espaço em L3, definindo uma superfície regular
parametrizada e suas curvas coordenadas. Ainda no mesmo capítulo inicia-se a diferenciação dos
dois espaços, definindo o plano tipo espaço e o plano tangente à superfície além da primeira forma
fundamental.
A seguir, faz-se o estudo da aplicação normal de Gauss nos dois espaços definindo a
segunda forma fundamental e o cálculo das curvaturas: normal, Gaussiana, média e principais.
O capítulo seis apresenta as aplicações da primeira e segunda forma fundamentais na
determinação das linhas de curvatura e linhas assintóticas para as superfícies em 3 e L3.
Inicia-se, então, o estudo específico das superfícies mínimas em 3 e máximas em
L3, onde determina-se todas as características geoméricas anteriormente definidas para as famílias
do catenóide, helicóide, superfícies de Enneper e superfícies de Scherk, cujos resultados são
comparados posteriormente para que se possa verificar as diferenças entre as duas métricas.
Finalizando, é apresentada uma sugestão de rotina de programação para o cálculo da
geometria das superfícies nas duas métricas, desenvolvida para o software Mathematica da
Wolfram Research Inc., software este utilizado durante o desenvolvimento deste estudo não só na
determinação dos cálculos mas também na construção das superfícies aqui mencionadas.

7
1 PRELIMINARES
Seja V um espaço vetorial real de dimensão finita. Uma forma bilinear em V é uma
aplicação bilinear g : V V , isto é, para u, v, w V e , , g satisfaz as seguintes
propriedades:P1. g u v, w g u, w g v, w
P2. g u, v w g u, v g u, w
P3. g u, v g u, v
P4. g u, v g u, v
Uma forma bilinear g em V é dita simétrica se satisfaz:P5. g u, v g v, u , para todo u, v V.
Definição 1.1. Seja g uma forma bilinear simétrica de V. Dizemos que g é:1. Positiva definida se para todo v 0, g v, v 0.
2. Positiva semi-definida se g v, v 0, para todo v V.
3. Negativa definida se para todo v 0, g v, v 0.
4. Negativa semi-definida se g v, v 0, para todo v V.
5. Não-degenerada se, para cada v 0 existe, pelo menos um vetor u V, tal queg v, u 0.
Observa-se que se g é não degenerada e v V é tal que g u, v 0 para todo u V,
então v é o vetor nulo.
Diz-se que g é degenerada se g não é não-degenerada, isto é, para cada v 0, todo
u V, é tal que g v, u 0.
Definição 1.2 Seja V um espaço vetorial real. Um produto interno sobre V, caso
particular de forma bilinear, é uma função , : V V , que a cada par de vetores u, v associa
um número real, que satisfaz as seguintes propriedades:P6. v, v 0, onde v, v 0 se, e somente se v 0
P7. u, v u, v , para todo .
P8. u v, w u, w v, w
P9. u, v v, u

8
Em n a função definida por
u, v i 1n u iv i u1v1 u2v2 . . . unvn (1.1)
onde u u1, u2, . . . , un , v v1, . . . , vnn , é o produto escalar chamado de produto escalar
usual ou produto escalar euclidiano.
Pelo fato de ser um caso particular de forma bilinear, o produto escalar verifica
também as propriedades P1 a P5.
Seja g uma forma bilinear simétrica em V. Então, se W V é um subespaço vetorial
de V, a restrição g|W W, denotada por g|W, é também uma forma bilinear simétrica. Além disso, se g
é positiva (negativa), (semi) definida o mesmo ocorre com g|W.
Definição 1.3. O índice v, de uma forma bilinear simétrica g em V é a maior das
dimensões dos subespaços W de V , tal que g|W é negativa definida. Em outras palavras:
v max dimW;W é subespaço de V e g|W é negativa definida
Logo, 0 v dimV e v 0 se, e somente se, g é positiva semi-definida.
Definição 1.4. Se g é uma forma bilinear simétrica em V, a função Q : V ,
definida por Q u g u, u é chamada de forma quadrática associada a g.
Exemplo 1.1. A forma quadrática Q, associada a forma bilinear u, u , onde u, u é
um produto escalar usual de 2, é dada por:
Q u u12 u2
2.
Dada uma base e1, e2, . . . , en de V, a matriz n n, g ij g e i, e j é chamada de
matriz de g relativa à base e1, e2, . . . , en . Nota-se que, como g é simétrica, g ij é uma matriz
simétrica. Além disso, dados u, v V, existem números reais u i, v j tais que u i 1n u ie i e
v i 1n v je i. Portanto,
g u, v g i 1n u ie i, j 1
n v je j i,j 1n u iv j e i, e j i,j 1
n g iju iv j.
Lema 1.1. Uma forma bilinear simétrica em um espaço V é não-degenerada se, e
somente se, sua matriz relativa a qualquer base é uma matriz invertível.
Logicamente, será degenerada se a matriz não possuir uma inversa.

9
Demonstração: Seja e1, e2, . . . , en uma base qualquer de V. Observe que dado
v V, então g v, w 0 para todo w V se, e somente se, g v, e i 0 para i 1,2, . . , n. Temos
também que, como a matriz g ij é simétrica, vale:
g v i, e i g v je j, e i g ijv j.
Assim, g é degenerada se, e somente se, existem números reais v1, v2, . . . , vn, não
todos nulos, tal que g i,jv j 0, para i j 1,2, . . , n. Mas isso é equivalente a dizer que as
colunas de g ij são linearmente dependentes, isto é, que g ij não possui inversa.
Vamos considerar um espaço vetorial real V com produto interno.
Definição 1.5. Um vetor u V é dito nulo ou neutro se u 0 e Q u u, u 0.
Definição 1.6. Dizemos que dois vetores u, v V são ortogonais, e escrevemos u v,
se u, v 0. Dois subconjuntos A, B V são ditos ortogonais, e escrevemos A B, se u v para
todo u A e todo v B.
Dado um subespaço W V, seja
W v V;v W .
Pode-se mostrar que W é também um subespaço de V chamado de ortogonal de W.
Lema 1.2. Se W é um subespaço de um espaço V com produto interno, então:1. dimW dimW dimV
2. W W
Demonstração:
(1) Seja e1, e2, . . . , en uma base de V adaptada a W, isto é, tal que e1, . . . , ek seja uma
base de W. Temos que v W se, e somente se, v, e i 0 para 1 i k, ou seja, se e somente
se,
j 1n g ijv j 0 1 i k 1.2
onde v j 1n v je j.
Logo, a igualdade (1.2) é um sistema de k equações lineares com n incógnitas. Mas,
pelo lema 1.1, as linhas da matriz g ij são linearmente independentes e, portanto, a matriz acima,
tem posto k. Assim, o espaço das soluções de (1.2) possui dimensão n k. Como o espaço solução
de (1.2) é exatamente W , segue que dimW n k.
(2) Seja v W. Então v W ou seja, v W . Logo W W . Porém pelo
item (1), estes dois subespaços possuem a mesma dimensão e assim sendo, são iguais.

10
Um subespaço W é dito não-degenerado se g|W é não-degenerada. Note que se V é
um espaço vetorial com uma forma bilinear g, todos os subespaços de V são não-degenerados.
Lema 1.3. Um subespaço W de V é não-degenerado se, e somente se V é soma direta
de W e W .
Demonstração: Assumiremos como verdadeira a seginte identidade:
dim W W dim W W dimW dimW 1.3
De acordo com o item (1) do lema (1.2), dim W dimW n. Assim, pela
identidade (1.3), W W V se, e somente se, dim W W 0. Mas estas duas condições são
equivalentes a V W W . Porém, W W w W;w W 0 se, e somente se g|W é
não-degenerada, ou seja, se, e somente se, W é não degenerado.
Segue do lema (1.3) e da igualdade W W, que W é não-degenerado se, e
somente se W também é não-degenerado.
Definição 1.7. Seja V um espaço vetorial com produto interno g, a norma ||v||, de um
vetor v V, será dada por:
||v|| g v, v . (1.4)
Dizemos que um vetor u V é unitário se ||u|| 1. Usualmente, um conjunto de
vetores mutuamente ortogonais e unitários, será chamado de um conjunto ortonormal. Prova-se
que se dimV n, um conjunto ortonormal de n vetores é necessariamente uma base de V.
Lema 1.4 Um espaço vetorial com produto interno possui uma base ortonormal
(BOLDRINI et al1980[3]).
É sempre conveniente ordenar os vetores em uma base ortonormal de forma que os
sinais negativos, se houver, apareçam nas primeiras posições, para satisfazer a condição de que
u, u 0 é tipo espaço. Neste caso, a n-upla
j 1, 2, . . . , n 1, . . . , 1, 1, . . . 1
é chamada de assinatura de g. Usa-se também a notação , . . . , , , . . . , .

11
2 ESPAÇO TRIDIMENSIONAL EUCLIDIANO 3
Seja o espaço vetorial tridimensional 3 munido do produto escalar euclidiano
u, v i 13 u iv i onde u u1, u2, u3 e v v1, v2, v3 são vetores de 3, e a norma euclidiana
||u|| u12 u2
2 u32 2.1
Assim sendo, diz-se que 3 é um espaço normado. Esta aplicação já definida no
capítulo anterior, satisfaz, segundo Picado(2003, p.2)[16] aos seguintes axiomas de norma:1. u 3 0 , ||u|| 0
2. u 3, , || u|| | | ||u||
3. u, v 3, ||u v|| ||u|| ||v|| (desigualdade triangular)
4. u, v 3, u, v ||u|| ||v|| (desigualdade de Cauchy-Schwarz)
O produto escalar euclidiano verifica a seguinte propriedade:
u, v ||u|| ||v|| cos onde é o ângulo entre u e v.
O referido espaço é dotado de uma forma bilinear simétrica e é degenerado.
Definição 2.1. O produto vetorial u v (também denotado u v) de
u u1, u2, u3 , v v1, v2, v33, definido por:
u ve1 e2 e3
u1 u2 u3
v1 v2 v3
2.2
onde e1, e2, e3 é uma base ortonormal de 3.
Observação 2.1. O símbolo à direita de (2.2) não é um determinante, pois a primeira
linha contém vetores em lugar de escalares. Trata-se apenas de uma notação mais simples.
Geometricamente, pode-se ver que ||u v|| é a área do paralelogramo determinado
pelos vetores u, v, conforme Swokowski(1994, p.248)[19].
O produto vetorial, segundo Steimbruch, Winterle(1987)[18], goza das seguintes
propriedades:1. u v v u , u, v 3.
2. u v u v u v, .
3. u v w u v u w
4. u v w u, w v u, v w
As propriedades (1) e (2) confirmam que o produto vetorial é uma função bilinear

12
(COIMBRA, 1994 [4]).
Definição 2.2. Sejam os vetores u, v, w 3.Denomina-se produto misto dos três
vetores u, v, w 3 ao número real u, v w definido por:
u, v w detu1 u2 u3
v1 v2 v3
w1 w2 w3
2.5
Propriedades:1. u, v w u v, w , u, v, w 3.
2. u, v w 0 se, e somente se, u, v, w são linearmente dependentes.

13
3 ESPAÇO VETORIAL DE LORENTZ-MINKOWSKI L3
Definição 3.1. Seja 3 x1, x2, x3 |x1, x2, x3 o espaço real 3-dimensional.
Dados x x1, x2, x3 e y y1, y2, y3 em 3, definimos o pseudo produto escalar de x e y por
x, y 1 x1y1 x2y2 x3y3 3.1
Chamaremos 13, , 1 de espaço tridimensional de Lorentz-Minkowski e
denotaremos por L313.
Definição 3.2. Seja v um vetor em um espaço L3. Dizemos que v é:1. Tipo espaço (spacelike) se v, v 1 0 ou v 0.
2. Tipo luz (lightlike) ou neutro se v, v 1 0 e v 0
3. Tipo tempo (timelike) se v, v 1 0
Exemplo 3.1. Seja L3 o espaço de Lorentz-Minkowski de dimensão 3 e o vetor
genérico u u1, u2, u3 . Temos que:1. Os vetores u u1, u2, u3 , com |u1 |2 |u2 |2 |u3 |2, são do tipo espaço.
Seja u 2,3,1 . Temos que u, u 1 22 32 12 4 10 6
Logo, pela definição (3.2), u é tipo espaço.2. Os vetores u u1, u2, u3 , com |u1 |2 |u2 |2 |u3 |2, são do tipo luz.
Seja u 5,3,4 . Temos que u, u 1 52 32 42 25 25 0
Logo, pela definição (3.2), u é tipo luz.3. Os vetores u u1, u2, u3 , com |u1 |2 |u2 |2 |u3 |2, são do tipo tempo.
Seja u 3,2,2 . Temos que u, u 1 32 22 22 9 8 1
Logo, pela definição (3.2), u é tipo tempo.
Seja W um subespaço do espaço de Lorentz-Minkowski e , 1 o pseudo produto
escalar de L3. Existem três possibilidades mutuamente exclusivas para W:1. g|W é positivo definido, isto é, W é um espaço com produto interno. Neste caso, dizemos
que W é do tipo espaço.
2. g|W é não degenerado de índice 1, ou seja, W é um espaço de Lorentz-Minkowski. Nestecaso, dizemos que W é tipo tempo.
3. g|W é degenerado. Dizemos então que W é tipo luz.

14
Observação 3.1 Como o pseudo produto escalar definido por (3.1) não é positivo
definido, este não pode ser, portanto, um produto interno.
3.1 Norma e Base Ortonormal
Definição 3.3. Se v v1, v2, v3 L3 definimos a norma de v por:
||v|| | v, v 1 | 12 | v1
2 v22 v3
2 | 3. 2
Dois vetores u e v em L3 são ortogonais se u, v 1 0 e um vetor u em L3 que
verifica u, u 1 1 é chamado de vetor unitário.
Definição 3.4. Uma base v1, v2, v3 em L3 é chamada de base ortonormal se os
vetores v i, j, i, j 1,2,3, são mutuamente ortogonais.
v i, v j 1
1, se i j 11, se i j 2,30, se i j
Exemplo 3.2. Os vetores canônicos e1 1,0,0 , e2 0,1,0 , e3 0,0,1
formam a base ortonormal canônica de L3.
Teorema 3.1. (Naber, 1993 [14]) Suponha que u é um vetor tipo tempo e v 0 é um
vetor tipo tempo ou nulo. Seja e1, e2, e3 uma base ortonormal de L3 com u 13 x ie i e
v 13 y je j, i j, então:
a) 13 x iy i 0, neste caso, u, v 1 0, ou
b) 13 x iy i 0, neste caso, u, v 1 0
Demonstração: Pela suposição, temos u, u 1 23 x i
2 x12 0 e
v, v 1 23 y j
2 y12 0, assim,
u3v3 u i2v j
2 i, j 1,2 e então temos que
|x1y1 | x i2y j
2 1/2 3.3
Tem-se que, para qualquer t ,
0 ty1 x12 ty2 x2
2 ty3 x32 y j
2t2 2 x iy j t x i2 i, j 1,2,3 e i j .
assim, considerando uma equação quadrática em t, essa expressão não pode ter raízes reais

15
distintas, logo, o discriminante deve assumir um valor menor ou igual a zero, isto é,
4 x iy j2 4 x i
2y j2 0. Assim, x i
2y j2 x iy j
2 e temos que,
x i2y j
2 1/2 |x iy j| 3. 4
Combinando (3.3) e (3.4) obtemos
|x1y1 | |x iy j| |x1y1 x2y2 x3y3 | 3. 5
assim, em particular, x1y1 0 e além disso, u, v 1 0. Supomos, por adição, que x3y3 0.
Então, |x1y1 | |x iy j| x iy j, logo, x iy j x1y1 0, isto é, u, v 1 0. Em outras palavras, se
x1y1 0, então u, v 1 0 e assim u, v 0
Corolário 3.1. Se v é um vetor tipo tempo em L3 e u 0 é ortogonal a v, então u é
um vetor tipo espaço.
Demonstração: Seja o vetor tipo tempo v v1, v2, v3 L3 e
u u1, u2, u3 L3.
Utilizando (3.5) temos que |v1v1 | |v iv j| |v1v1 v2v2 v3v3 |
Se v1v1 0 e v, v 1 0, temos que |v1v1 | |v iv j| v iv j, logo |v2 |2 |v3 |2 |v1 |2, definimos v
como tipo tempo, ou seja, v, v 1 0.
Assim, u u1, u2, u3 é tipo espaço se, e somente se u, u 1 0, isto é, |u2 |2 |u3 |2 |u1 |,
conforme exemplo (3.1).
Exemplo 3.3. Sejam v e1 1,0,0 e u e2 0,1,0 vetores da base canônica
em L3. Supondo v e1 tipo tempo, temos:
|v1v1 | 1 |v iv j| 0 v é tipo tempo.
|u1u1 | 0 |v iv j| 1 u é tipo espaço.
3.2 Cone tipo tempo (O’Neill, 1993 [15])
Seja o conjunto de todos os vetores tipo tempo em L3. para u ,
C u v | u, v 1 0
é o cone tipo tempo de L3 (Figura 3.2) contendo u. O cone tipo tempo oposto é
C u C u v | u, v 1 0
Visto que u é tipo espaço, é a união disjunta desses dois cones tipo tempo.

16
FIGURA 3.1 Cone tipo tempo em L3.
Exemplo 3.3. Consideremos o vetor u 1,0,0 . Para u, temos
C u v | u, v 1 0
ou seja, v v1, v2, v3 . Logo,
v, v 1 0 e u, v 1 0v1
2 v22 v3
2 0 e v1 0v2
2 v32 v1
2 e v1 0
Lema 3.1. Dois vetores tipo tempo v e w em L3 estão no mesmo cone tipo tempo se,
e somente se v, w 1 0.
Demonstração: Temos que, se v C u e w é tipo tempo, então w C u se, e
somente se, v, w 1 0. Considerando C u||u|| C u , podemos assumir que u é um vetor
unitário tipo tempo. Vamos escrever v au v , w bu w, onde v , w u . Considerando que
v e w são vetores tipo tempo, temos:
v, v 1 0
au v , au v 1 0
a2 u, u 1 2a u, v 1 v , v 1 0
Como u é um vetor tipo tempo unitário u, u 1 1. Logo,
a2 1 v , v 1 0
a2 v , v 1
|a| ||v ||
Analogamente, sendo w um vetor tipo tempo, temos,
w, w 1 0
bu w, bu w 1 0
b2 u, u 1 2b u, w 1 w, w 1 0
b2 1 w, w 1 0

17
b2 w, w 1
|a| ||w||
Temos ainda,
v, w 1 au v , bu w
ab u, u 1 a u, w 1 b u, v 1 v , w 1
ab v , w 1
pois u, w 1 u, v 1 0, visto que u é perpendicular a v e w.
Pela desigualdade de Cauchy-Schwarz e observando que |a| ||v || e
|b| ||w|| |ab| ||v || ||w||, temos,
| v , w 1 | ||v || ||w|| |ab|.
Como v C u , a 0, temos por conseqüência que
sinal v, w 1 sinal ab sinal b , confirmando o resultado.
Muitos resultados do espaço vetorial com produto interno têm uma versão análoga
em L3. Por exemplo, em um espaço com produto interno a desigualdade de Cauchy-Schwarz
permite a definição do ângulo entre v e w como o único número 0 tal que
cos v, w 1
||v|| ||w||. Um resultado análogo em L3 é o que segue.
Proposição 3.1. Sejam v e w vetores tipo tempo em L3. Então:a. | v, w 1 | ||v|| ||w||, com igualdade se, e somente se, v e w são colineares.
b. Se v e w estão no mesmo cone tipo tempo de L3, há um número 0, tal que
cosh v, w 1
||v|| ||w||3. 3
onde é o ângulo hiperbólico entre v e w.
Demonstração:
(a) Escreva w av w, com w v . Sendo w tipo tempo, temos:
w, w 1 av w, av w 1
a2 v, v 1 2a v, w 1 w, w 1
Sendo v, w 1 0, temos,
w, w 1 a2 v, v 1 w, w 1 0
w, w 1 w, w 1 a2 v, v 1 0
Por outro lado,
v, w 12 v, av w 1
2
v, av w 12 v, av w 1
2
a v, v 1 v, w 1 a v, v 1 v, w 1

18
Como v, w 1 0, resulta em:
v, w 12 a2 v, v 1
2
w, w 1 w, w 1 v, v 1 w, w 1 v, v 1 ||w||2 ||v||2
Visto que w, w 1 0, pois w é tipo espaço e v, v 1 0, pois v é tipo tempo, temos:
v, w 12 ||w||2 ||v||2 | v, w 1 | ||v|| ||w||
Evidentemente, a igualdade é válida se, e somente se, w, w 1 0, o que é
equivalente a w 0, resultando em w av. Logo, v e w são colineares.
(b) Se v e w estão no mesmo cone tipo tempo, então v, w 1 0, por isso:
| v, w 1 | ||v|| ||w||| v, w 1 |||v|| ||w||
1 e | v, w 1 |||v|| ||w||
1
e, portanto, existe um ângulo 0 tal que cosh cosh v, w 1
||v|| ||w||. Convém observar
que cosh 1.
3.3. O Produto Vetorial no Espaço L3
Definição 3.5 Seja u, v L3. Define-se o produto vetorial de u u1, u2, u3 e
v v1, v2, v3 , nesta ordem como sendo o único vetor u v L3 definido por:
u ve1 e2 e3
u1 u2 u3
v1 v2 v3
3.4
onde e1, e2, e3 é uma base ortonormal de L3.
Rodrigues(2006, p.21)[17] demonstra que o produto misto de três vetores
u, v, w L3 onde u u1, u2, u3 , v v1, v2, v3 e w w1, w2, w3 é dado por:
u, v w 1 detu1 u2 u3
v1 v2 v3
w1 w2 w3
3.5
Propriedades:1. u v v u
2. au bv w au w bv w
3. u v 0 se, e somente se u, v são linearmente dependentes.
4. u, u v 1 v, u v 1 0

19
5. u v, w z 1 detu, z 1 v, z 1
u, w 1 v, w 1
6. u v w v, w 1u u, w 1v
onde u, v, w, z L3 e a, b .
As propriedades acima descritas são também demonstradas por Rodrigues(2006,
p.22-26)[17].

20
4 GEOMETRIA DIFERENCIAL DE SUPERFÍCIES TIPO ESPAÇO EM 3 EL3
Definição 4.1. Uma superfície regular é uma aplicação X : U 2 M M 3
ou M L3 de um conjunto aberto U 2 para M tal que:1. X é diferenciável, o que significa que se escrevermos
X u, v x u, v , y u, v , z u, v , u, v U, as funções x u, v , y u, v e z u, v têmderivadas parciais contínuas de todas as ordens em U.
2. (Condição de regularidade) Para cada q U a diferencial dX q : 2 M é um-a-um.
A aplicação X é chamada de parametrização e as variáveis u e v são chamadas de
parâmetros da superfície X. O conjunto imagem S X u, v M é chamado de traço de X
(FIGURA 4.1).
FIGURA 4.1 Superfície regular em M .
Para dar à condição (2) uma forma mais familiar, vamos calcular a matriz da
aplicação linear dX q nas bases canônicas e1 1,0 e e2 0,1 de 2 com parâmetros u, v e
f1 1,0,0 , f2 0,1,0 , f3 0,0,1 de M com coordenadas x, y, z .
Definição 4.2 Seja X : U 2 M uma superfície parametrizada, então,
fixando-se q u0, v0 U, as curvas
u X u, v0 e v X u0, v
são chamadas curvas coordenadas de X em q (FIGURA 4.2).
Esta curva tem em X q o vetor tangente
xu , y
u , zu
Xu Xu

21
onde as derivadas são calculadas no ponto u0, v0 e um vetor é indicado pelos seus componentes
na base f1, f2, f3 (FIGURA 4.2).
FIGURA 4.2 Curvas coordenadas de uma superfície regular em M .
Pela definição de diferencial, dX e1xu , y
u , zu
Xu Xu
Analogamente, usando a curva coordenada u u0 (imagem por X da curva
V u0, v ), obtemos:
dX e2xv , y
v , zv
Xv Xv.
Assim, a matriz jacobiana da aplicação linear dX q na referida base é:
dX q
xu
xv
yu
yv
zu
zv
4.1
A condição (2) pode agora ser expressa requerendo que dois vetores coluna desta
matriz sejam linearmente independentes; isto é; equivalentemente, que o produto vetorial
Xu Xv 0; ou ainda de outro modo, que um dos determinantes de ordem 2 da matriz dX q
denominados determinantes jacobianos
x, yu, v
xu
xv
yu
yv
; y, zu, v
yu
yv
zu
zv
; x, zu, v
xu
xv
zu
zv
não seja nulo no ponto q.

22
Exemplo 4.1 Plano (tipo espaço): seja p0 x0, y0, z0 um ponto de M L3,
a a1, a2, a3 e b b1, b2, b3 vetores ortonormais tipo espaço de L3. Consideremos a
aplicação X : 2 M dada por
X u, v p0 ua vb, u, v 2
então X é uma superfície regular parametrizada.
De fato,
X u, v x0 ua1 vb1, y0 ua2 vb2, z0 ua3 vb3
Observa-se que X é de classe C , pois cada uma de suas funções ordenadas é de
classe C .
Temos que,
Xuxu , y
u , zu a1, a2, a3 a
Xvxv , y
v , zv b1, b2, b3 b
Logo, Xu Xv a b 0, pois a e b são linearmente independentes.
A imagem X 2 é um plano em M (chamado plano tipo espaço). Esse plano passa
por p0 e é perpendicular ao vetor tipo tempo a b.
Exemplo 4.2 A pseudo-esfera (FIGURA 4.3) definida por
S12 x, y, z L3; x2 y2 z2 1
é uma superfície regular.
2
4
-4
-4
x
-2-4
0
-2
y
-2
4
22
4
0z
0
FIGURA 4.3 Pseudo-esfera no espaço tridimensional de Lorentz-Minkowski - L3
Verifica-se que a aplicação X1 : U 2 L3 dada por:

23
X1 u, v u, v, 1 v2 u2 ,
u, v U, onde 2 u, v, w L3;w 0 e U u, v L2;v2 u2 1 é uma
parametrização de S12.
De fato,
x2 y2 z2 u2 v2 1 v2 u2
u2 v2 1 v2 u2
1
Observa-se, ainda, que X1 U é a parte aberta de S12 sobre o plano uv. Sendo
v2 u2 1, a função 1 v2 u2 tem derivadas parciais contínuas de todas as ordens. Então,
X1 é diferenciável verificando a condição (1).
Analogamente, podemos definir parametrizações como a seguinte. Seja
X2 : U 2 L3 dada por:
X2 u, v u, v, 1 v2 u2 .
Verificamos que X2 é uma parametrização de S12.
De fato,
x2 y2 z2 u2 v2 1 v2 u2
u2 v2 1 v2 u2 1
Observa-se que X1 U X2 U cobre S12 exceto o "equador " (FIGURA 4.4).
-0.50.0
0.5
1.0
z
-1.0
-1.0-0.5
y0.0
0.5
1.0 1.0
0.5 x0.0
-0.5-1.0
FIGURA 4.4 Representação de X1 U X2 U .
Usando os planos uw e wv, definimos as parametrizações:
X3 u, w u, 1 w2 u2 , w

24
X4 u, w u, 1 w2 u2 , w
X5 v, w 1 w2 v2 , v, w
X6 u, w 1 w2 v2 , v, w
Pode-se mostrar que a condição (2) de regularidade se verifica. Para isso, considere
X1 u, v u, v, 1 v2 u2 . Assim, temos:
X1u X1u 1,0, u
1 v2 u2,
X1v X1v 0,1, v
1 v2 u2,
X iu X1v
e1 e2 e3
1 0 u1 v2 u2
0 1 v1 v2 u2
u1 v2 u2
, v1 v2 u2
, 1
Assim,
||X1u X1v||2 u2
1 v2 u2v2
1 v2 u2 1
u2 v2 1 v2 u2
1 v2 u2
11 v2 u2 0, pois v2 u2 1
Logo, os vetores X1u e X1v são linearmente independentes.
Para mais aplicações, é conveniente utilizar outras parametrizações de S12. Seja
U u, v 2;u, v e seja X : U L3 dada, por:
X u, v sinhu, coshu sechv, coshu tanhv
Evidentemente, X U S12. Verifica-se que X é uma parametrização de S1
2.
De fato,
x2 y2 z2 sinh2u cosh2u sech2 v cosh2u tanh2v
sinh2u cosh2u sech2 v tanh2v
sinh2u cosh2u 1

25
-2y
2
x0
24
-2
0
2
-4
-2
0
z
FIGURA 4.5 Forma parametrizada da pseudoesfera em L3.
4.1 O Plano tangente
Definição 4.3 Seja X : U 2 M uma superfície regular parametrizada. Um
vetor w M é chamado vetor tangente a X em q u0, v0 se w t0 , onde
t X u t , v t é uma curva da superfície, tal que u t0, v t0 u0, v0 .
Definição 4.4 O plano tangente a X em q u0, v0 é o conjunto de todos os vetores
tangentes a X em q, obtidos como combinação linear de Xu u0, v0 e Xv u0, v0 , que será denotado
por T q X (FIGURA 4.6).
FIGURA 4.6 Plano tangente a X em q u0, v0 X U .

26
Definição 4.5 Um plano em M M 3 ou M L3 é tipo espaço se a métrica
induzida é Riemanniana.
Definição 4.6 Uma superfície X : U 2 M é chamada superfície tipo espaço
se o plano tangente em todo ponto é tipo espaço, isto é, v, v 0 ou v, v 1 0 para cada
v T q X.
Exemplo 4.3. Toda superfície (clássica) em 3 é tipo espaço.
Exemplo 4.4 O plano X u, v p0 ua vb, u, v 2 e p0 x0, y0, z0 L3, a
e b são vetores ortonormais de M L3, é uma superfície tipo espaço.
De fato, sejam a1, a2, a3 e b b1, b2, b3 vetores tipo espaço de M. Temos,
XuXu a a1, a2, a3
XvYv b b1, b2, b3
Logo, X é uma superfície tipo espaço.
Exemplo 4.5 O pseudo espaço hiperbólico é definido por
H2 1 x, y, z L3; x2 y2 z2 1 (FIGURA 4.7).
-2
x
-2
2
02
-2
2y
0
0
z
FIGURA 4.7 Pseudo espaço hiperbólico.

27
Pode-se mostrar que a aplicação X : U 2 L3 , U u, v 2, u, v
dada por:
X u, v 1 u2 v2 , u, v ; u, v U
é uma parametrização de H2 1 .
De fato,
x2 y2 z2 1 u2 v2 2u2 v2
1 u2 v2 u2 v2
1
Para mais aplicações, é conveniente utilizar outras parametrizações de H2 1 . Seja
U u, v 2;u, v e seja X : U L3 dada por:
X u, v coshu coshv, coshu sinhv, sinhu
Evidentemente, X U H2 1 . Pode-se mostrar que X é uma parametrização de
H2 1 .
De fato,
x2 y2 z2 cosh2u cosh2v cosh2u sinh2v sinh2u
cosh2u cosh2v sinh2v sinh2u
cosh2u sinh2u
1
Considerando esta última parametrização de H2 1 , temos,
Xu sinhu coshv, sinhu sinhv, coshu
Xu, Xu 1 sinh2u cosh2v sinh2u sinh2v cosh2u
sinh2u cosh2v sinh2v cosh2u
sinh2u cosh2u
1 0
Xv coshu sinhv, coshu coshv, 0
Xv, Xv 1 cosh2u sinh2v cosh2u cosh2v
cosh2u sinh2v cosh2v
cosh2u 0
Então, o pseudo espaço hiperbólico H2 1 é uma superfície tipo espaço.
Exemplo 4.6 O cone tipo luz aberto é definido por
LC x, y, z L3 0 ; x2 y2 z2 0 (FIGURA 4.8).

28
6040
200
x
-20-40
-60
y0
-40-60
-60
-20
6040
20
-40-20
0
z
2040
60
FIGURA 4.8 Cone tipo luz.
Pode-se mostrar que a aplicação X : 2 0 L3 dada por
X u, v u2 v2 , u, v
é uma parametrização de LC .
De fato,
x2 y2 z2 u2 v2 2u2 v2
u2 v2 u2 v2
0
Considerando X u, v u2 v2 , u, v , temos,
Xu2u
2 u2 v2, 1, 0 u
u2 v2, 1, 0
Xu, Xu 1u2
u2 v2 1
u2 u2 v2
u2 v2
v2
u2 v2 0
Xv2v
2 u2 v2, 0, 1 u
u2 v2, 0, 0
Xu, Xu 1v2
u2 v2 1
v2 u2 v2
u2 v2

29
u2
u2 v2 0
Logo, o cone tipo luz LC é uma superfície tipo espaço.
4.2 O Vetor Normal Unitário
Seja X : U 2 M M 3 ou M L3 uma superfície tipo espaço. Se Xu e
Xv são vetores tipo espaço do plano tangente T q X, então existe uma única direção normal a este
plano e, portanto, existem exatamente dois vetores unitários normais a X em q, como sendo o vetor
N qXu Xv
||Xu Xv|| q .
Se o domínio da superfície X é um aberto U 2 então, variando u, v U temos
uma aplicação diferenciável N : U M , denominada aplicação normal de Gauss, definida por
N u, v Xu Xv||Xu Xv|| u, v .
Se M 3, a imagem de N u, v está contida na esfera unitária, centrada na origem
(FIGURA 4.9).
FIGURA 4.9 Aplicação normal de Gauss para o espaço tridimensional Euclidiano 3.
Por outro lado, se M L3, temos que Xu Xv, Xu 1 Xu Xv, Xv 1 0, e

30
assim, Xu Xv, pelo corolário (3.1), é um vetor tipo tempo. O vetor normal à superfície é
perpendicular ao plano tangente.
Conseqüentemente, o vetor unitário N q é um vetor tipo tempo de L3 (FIGURA
4.10) cuja imagem N u, v está contida no pseudo espaço hiperbólico
H2 1 x, y, z L3; x2 y2 z2 1, x 0 .
FIGURA 4.10 Aplicação normal de Gauss para o espaço tridimensional de Lorentz-MinkowskiL3.
4.3 A Primeira Forma Fundamental
Definição 4.7 Seja X : U 2 M M 3 ou M L3 uma superfície regular
tipo espaço. A forma quadrática I q : T q X dada por
v I q v, v ||v||2 0;
v T q X, é chamada primeira forma fundamental da superfície regular X M em q X, aqui
denotada por I q .
Expressa-se a primeira forma fundamental na base Xu, Xv associada à
parametrização X u, v em q u0v0 (FIGURA 4.11).Visto que um vetor tangente

31
t X u t , v t , t I x, x , com q u0, v0 , temos:
I q t0 , t0 q
Xuu Xvv , Xuu Xvv q
Xu, Xu q u 2 Xu, Xv qu v Xv, Xu qu v Xv, Xv q v 2
Xu, Xu q u 2 2 Xu, Xv qu v Xv, Xv q v 2
E u 2 2Fu v G v 2 4.2
onde,
E u0, v0 Xu, Xu q
F u0, v0 Xu, Xv q
G u0, v0 Xv, Xv q
4.3
FIGURA 4.11 Primeira forma fundamental.
De outra forma, seja v T q X tal que v aXu q bXv q , onde a, b .
Logo,
I q v, v q aXu q bXv q , aXu q bXv q
a2 Xu, Xu q 2ab Xu, Xv q b2 Xv, Xv q
Utilizando as expressões (4.3), temos:
I q a2E q 2abF q b2G q 4.4
em que E, F, G são funções das variáveis u e v e possuem as seguintes propriedades:1. E u, v 0 e G u, v 0, para todo u, v , pois os vetores Xu e Xv são não-nulos.
2. E u, v G u, v F2 u, v 0
De fato, como
||Xu Xv||2 Xu, Xv2 ||Xu ||2 ||Xv||2, temos que

32
EG F2 ||Xu ||2 ||Xv||2 Xu, Xv2 ||Xu Xv||2 0
Observação 4.1 Se M L3, aplicando a propriedade (5) da definição (3.3), produto
vetorial em L3, para u Xu, v Xv, temos:
u v, u v 1 detu, v 1 v, v 1
u, u 1 u, v 1det
Xu, X v 1 Xv, Xv 1
Xu, Xu 1 Xu, X v 1
u v, u v 1 Xu, X v 12 Xu, Xu 1 Xv, Xv 1 F2 EG.
Porém, como Xu Xv é tipo tempo, temos:
u v, u v 1 Xu, X v 12 Xu, Xu 1 Xv, Xv 1 Xu, Xu 1 Xv, Xv 1 Xu, X v 1
2 0
Logo, em qualquer M M 3 ou M L3 , a forma quadrática satisfaz
EG F2 ||Xu Xv||2 0
Geometricamente, a primeira forma fundamental se apresenta como ferramenta para
se calcular medidas sobre a superfície (comprimento de curvas, ângulos de vetores tangentes, áreas
de regiões), sem fazer menção ao espaço ambiente que esta se encontra, (TENENBLAT,1990
[20]).
Exemplo 4.7 Seja X u, v p0 uw1 vw2, u, v 2 onde w1 e w2 são vetores
tipo espaço ortonormais de M , M 3 ou M L3 isto é, X descreve o plano tipo espaço
ortogonal a w1 w2 que passa por p0. Então, Xu u, v w1 e Xv u, v w2. A primeira forma
fundamental é dada por:
E Xu, Xu ||w1 ||2 1
F Xu, Xv w1, w2 0 (são ortonormais)
G Xv, Xv ||w2 ||2 1
I q a2E 2abF b2G
I q a2 b2, a, b
Exemplo 4.8 Consideremos em 3 a superfície X u, v r cos u, r sinu, v ,
u, v 2 que descreve o cilindro circular reto de raio r , S x, y, z 3;x2 y2 1 . A
primeira forma fundamental de X u, v é dada por:
Xu r sinu, r cos u, 0
Xv 0,0,1
E Xu, Xu r2 sin2u r2 cos2u r2
F Xu, Xv 0
G Xv, Xv 1
I q a2E 2abF b2G

33
I q a2r2 b2, a, b , r 0
Exemplo 4.9 O pseudo espaço hiperbólico H2 1 admite a parametrização
X : 2 L3, onde X u, v 1 u2 v2 , u, v , u, v 2. A primeira forma fundamental de
X u, v é dada por:
Xuu
1 u2 v2, 1, 0
Xvv
1 u2 v2, 0, 1
E Xu, Xu 1u2
1 u2 v2 1
u2 1 u2 v2
1 u2 v2
1 v2
1 u2 v2 0
F Xu, Xv 1uv
1 u2 v2
G Xv, Xv 1v2
1 u2 v2 1
v2 1 u2 v2
1 u2 v2
1 u2
1 u2 v2 0
Iq a2E 2abF b2G1 v2
1 u2 v2 a2 2ab uv1 u2 v2
1 u2
1 u2 v2 b2
1u2 v2 1
a2v2 a2 2abuv b2u2 b2
av bu 2 a2 b2
u2 v2 1, a, b .

34
5 A APLICAÇÃO NORMAL DE GAUSS E A SEGUNDA FORMAFUNDAMENTAL
Seja X : U 2 M M 3 ou M L3 uma superfície tipo espaço de M .
Definição 5.1: O sinal de uma superfície tipo espaço X : U 2 M é:
1, se N, N 1
-1, se N, N 1
5.1 A geometria da aplicação normal de Gauss
Definição 5.2 Seja X u, v uma superfície tipo espaço de M M 3 ou M L3
orientada pelo vetor unitário normal N. Se X u, v tem sinal , isto é, sinal N, N , as superfícies
em M com o mesmo sinal são dadas por (AKUTAGAWA, NISHIKAWA, 1990 [1]):
MS2 1 , se 1H2 1 , se 1
5.1
onde S2 1 é a esfera unitária e H2 1 o pseudo-espaço hiperbólico.
A aplicacão N : U M toma seus valores em M. Esta aplicação N : U M é
chamada "aplicação normal de Gauss de X u, v ".
Pode-se verificar que a aplicação normal de Gauss é diferenciável. A diferencial
dN q de N em q U é uma aplicação linear de TqX em TN q M. Como T q X e TN q M são os
mesmos espaços vetoriais, dN q pode ser obtida como uma aplicação linear
dNq T q X T q X
A aplicacão linear dN q T q X T q X opera de forma que para cada curva
parametrizada (tipo espaço) t em X u, v , com u 0 , v 0 q, consideramos a curva
parametrizada N t N t na superfície M, o que equivale a restringir o vetor normal N à
curva t . O vetor tangente N 0 dN q 0 é um vetor de T q X (DO CARMO, 2005 [5]).
Proposição 5.1: A diferencial dN q T q X T q X da aplicação de Gauss é uma
aplicação linear auto-adjunta.
Demonstração: Como dN q é linear, basta verificar que
dN q w1 , w2 w1, dN q w2 para uma base w1, w2 de T q X . Seja x u, v uma

35
parametrização de X em q e Xu, Xv a base associada de T q X. Se t X u t , v t é uma
curva parametrizada em X, com 0 q, temos:
dN q 0 dN q xuu 0 xvv 0ddt N u t , v t
t 0
Nuu 0 Nvv 0 ;
em particular, dNq xu Nu e dN q xv Nv. Portanto, para provar que dN q é auto adjunta, é
suficiente mostrar que
Nu, xv xu, Nu
Para ver isto, derivamos N, xu 0 e N, xv 0, em relação a v e u,
respectivamente, e obtemos:
Nv, xu N, xuv 0,
Nu, xv N, xvu 0.
Assim,
Nu, xv N, xuv Nv, xu
O fato de ser dNq : T q X T q X uma aplicação linear auto-adjunta nos permite
associar a dNq uma forma quadrática Q em T q X dada por Q v dN q v , v , v T q X.
Definição 5.3: A forma quadrática
II q v dN q v , v
é chamada a segunda forma fundamental da superfície tipo espaço X u, v em q.
Observação 5.1: Por motivos geométricos, utilizamos a forma quadrática Q.
Seja X u, v uma parametrização em um ponto q U de uma superfície tipo espaço
X, e seja t X u t , v t uma curva parametrizada em X, com q u 0 , v 0 . Para
simplificar a notacão, convencionaremos que todas as funções que aparecem abaixo indicam seus
valores no ponto q.
O vetor tangente a t em q é Xuu Xvv e
dN N u t , v t Nuu Nvv .
Portanto, a expressão da segunda forma fundamental na base Xu, Xv é dada por:
II q dN , dN ,
Nuu Nvv , Xuu Xvv
Nu, Xu u 2 Nu, Xv Nv, Xu u v Nv, Xv v 2

36
Sendo N, Xu N, Xv 0, então temos,
e Nu, Xu N, Xuu
f Nv, Xu N, Xuv N, Xvu Nu, Xv
g Nv, Xv N, Xvv
5.2
portanto, obtemos:
IIq e u 2 2fu v g v 2 5.3
onde e, f e g são chamados de coeficientes da segunda forma fundamental da superfície
parametrizada X u, v .
De modo mais simples, pode-se escrever os coeficientes da segunda forma
fundamental em função de outros parâmetros.
e Nu, Xu N, Xuu
N Xu Xv||Xu Xv||
De acordo com a propriedade (2) da primeira forma fundamental, temos:
||Xu Xv|| EG F2
Exemplo 5.1 O Pseudo espaço hiperbólico em L3 dado pela parametrização:
X u, v cos u coshv, coshu sinhv, sinhu
Xu sinhu coshv, sinhu sinhv, coshu
Xv coshu sinhv, coshu coshv, 0
Xu Xv
e1 e2 e3
sinhu coshv sinhu sinhv coshucoshu sinhv coshu coshv 0
Xu Xv cosh2u coshv, cosh2u sinhv, sinhu coshu
||Xu Xv|| | cosh4u cosh2v cosh4u sinh2v sinh2u cosh2u|
||Xu Xv|| | cosh2u| coshu
E Xu, Xu 1 sinh2u cosh2v sinh2u sinh2v cosh2u
sinh2u cosh2u
E 1
F Xu, Xv 1 sinhu coshvcoshu sinhv sinhu coshvcoshu sinhv
F 0
G Xv, Xv 1 cosh2u sinh2v cosh2u cosh2v
G cosh2u
EG F2 cosh2u coshu

37
Logo, ||Xu Xv|| EG F2
Rodrigues(2006)[17], demonstra que Xu Xv, Xuu é o mesmo valor em 3 quanto
em L3.Assim, podemos dizer que:
e Xu Xv||Xu Xv|| , Xuu
Xu Xv, Xuu
EG F2,
onde E, F, G são os coeficientes da primeira forma fundamental,
Analogamente, temos,
f Xu Xv||Xu Xv|| , Xuv
Xu Xv, Xuv
EG F2
g Xu Xv||Xu Xv|| , Xvv
Xu Xv, Xvv
EG F2
Verifica-se que a segunda forma fundamental independe da curva escolhida.
Seja v aXu u0, v0 bXv uov0 , considere uma curva qualquer
t X u t , v t X u, v tal que q u t0 , v t0 e t0 v, isto é,
u t0 , v t0 u0, v0 u t0 , v t0 a, b .
Como
t u t Xu u t , v t v t Xv u t , v t e
t u t Xu u t , v t u t 2Xuu u t , v t 2u t v t Xuv u t , v t
v t 2Xvv u t , v t v t Xv u t , v t
temos que
II q v t0 , N u0, v0
a2 Xuu, N 2ab Xuv, N b2 Xvv, N
onde esta última expressão não depende da curva t .
Utilizando as expressões (5.2), podemos reescrever a equação (5.3) de uma forma
mais simples como
II q v a2e q 2abf q b2g q 5.4
Exemplo 5.2 Consideremos em 3 a superfície X u, v r cos u, r sinu, v ,
u, v 2 que descreve o cilindro circular reto de raio r, S x, y, z 3;x2 y2 1 . A
segunda forma fundamental de X u, v é dada por:
Xu r sinu, r cos u, 0
Xv 0,0,1
Xuu r cos u, r sinu, 0

38
Xvv 0,0,0
Xuv 0,0,0
E r2; F 0; G 1
e Xu Xv, Xuu
EG F21
r2 1 0det
r sinu r cos u 00 0 1
r cos u r sinu 0
1r r2 cos2u r sin2u
r
f Xu Xv, Xuv
EG F21
1 1 0det
sinu cos u 00 0 10 0 0
0
g Xu Xv, Xvv
EG F21
1 1 0det
sinu cos u 00 0 10 0 0
0
II q a2e q 2abf q b2g q
II q a2 r 2ab 0 b2 0
II q a2r, a
Exemplo 5.3 Considere o pseudo espaço hiperbólico H2 1 com a parametrização
X u, v 1 u2 v2 , u, v , u, v 2. A segunda forma fundamental de X u, v é dada por:
Xuu
1 u2 v2, 1, 0
Xvv
1 u2 v2, 0, 1
Xuuv2 1
u2 v2 132
, 0, 0
Xvvu2 1
u2 v2 132
, 0, 0
Xuvuv
u2 v2 132
, 0, 0
E 1 v2
1 u2 v2 ;

39
F uv1 u2 v2 ;
G 1 u2
1 u2 v2
e Xu Xv, Xuu 1
EG F2
11 v2
1 u2 v21 u2
1 u2 v2uv
1 u2 v2
2det
u1 u2 v2
1 0
v1 u2 v2
0 1
v2 1u2 v2 1
32
0 0
11
u2 v2 1
v2 1u2 v2 1
32
u2 v2 1 v2 1u2 v2 1
32
v2 1u2 v2 1
f Xu Xv, Xuv 1
EG F2
11 v2
1 u2 v21 u2
1 u2 v2uv
1 u2 v2
2det
u1 u2 v2
1 0
v1 u2 v2
0 1
uvu2 v2 1
32
0 0
uv1
u2 v2 1u2 v2 1
32
u2 v2 1 uvu2 v2 1
32
uvu2 v2 1
g Xu Xv, Xvv 1
EG F2
11 v2
1 u2 v21 u2
1 u2 v2uv
1 u2 v2
2det
u1 u2 v2
1 0
v1 u2 v2
0 1
u2 1u2 v2 1
32
0 0
11
u2 v2 1
u2 1u2 v2 1
32
u2 v2 1 u2 1u2 v2 1
32
u2 1u2 v2 1

40
II q a2e q 2abf q b2g q ,
Logo,
II q a2 v2 1u2 v2 1
2ab uvu2 v2 1
b2 u2 1u2 v2 1
1u2 v2 1
a2v2 a2 2abuv b2u2 b2
av bu 2 a2 b2
u2 v2 1, a, b .
5.2 Curvatura normal e curvaturas principais
Definição 5.4: Seja X : U R2 M M R3 ou M L3 uma superfície tipo
espaço em M e q u0, v0 I. A função kn : T q X 0 R dada por
kn vII q vI q v 5.5
que para cada vetor v T q X, v 0, é chamada de curvatura normal de X u, v em q.
Observação 5.2: Se v T q X, v 0, então kn v kn v para todo R, 0.
Daremos uma interpretação geométrica da curvatura normal e da segunda forma
fundamental IIq. No caso da superfície tipo espaço X u, v em L3.
Consideremos o vetor unitário v T q X e uma curva regular s X u s , v s da
superfície X u, v , onde s é o comprimento de arco de , tal que u s0 , v s0 q e s0 v.
Seja N o vetor normal unitário à superfície X u, v , ao longo de (FIGURA 5.1). Temos,
, N 1 0 , N t 1 , N t 1 0
, N t 1 , dN 1 II q
Supondo que a curvatura da curva em s0 não se anula, k s0 0. Utilizando as
equações de Frenet (DO CARMO, 2005[5]), obtemos:
s0 s0 s0 s0
Portanto,
kn v II q v s0 , N u s0 , v s0 1
k s0 n s0 , N u s0 , v s0 1
kn k s0 cosh 5.6
onde n s0 é o vetor tipo espaço unitário normal à curva em s0 e n, N 1 cosh , em que
n, N .

41
FIGURA 5.1 Ângulo entre os vetores n e N.
Observação 5.3: No caso da superfície tipo espaço X u, v em 3, temos uma
interpretação análoga para a curvatura normal kn e a segunda forma fundamental II q . Neste caso,
obtemos:
kn v II q k s0 cos
onde cos n, N .
Da álgebra linear sabemos que dN é uma aplicação linear auto-adjunta. Então existe
uma base ortonormal e1, e2 de T q X tal que dN e1 k1e1 e dN e2 k2e2.
Além disso, k1 e k2 k1 k2 são o máximo e o mínimo da segunda forma
fundamental II q restrita ao círculo unitário de T q X, extremos da curvatura normal em q.
Definição 5.5: O máximo da curvatura normal k1 e o mínimo da curvatura normal k2
são chamadas curvaturas principais em q nas direções correspondentes, isto é, as direções dadas
pelos auto-vetores e1 e e2 são chamadas de direções principais em q.
Retornando a (4.4) e (5.3) em (5.5), temos:
knII q
I q
a2e 2abf b2ga2E 2abF b2G
, a, b 5.7
Exemplo 5.4 Consideremos a superfície X u, v r cos u, r sinu, v , u, v 2 que
descreve o cilindro circular reto de raio r, S x, y, z 3;x2 y2 1 . A curvatura normal do
cilindro é:

42
I q a2r2 b2
II q a2r
knII q
I q
a2e 2abf b2ga2E 2abF b2G
kna2r
a2r2 b2 , a, b .
Exemplo 5.5 Considere o pseudo espaço hiperbólico H2 1 . Sua curvatura normal
de X u, v é dada por:
I qav bu 2 a2 b2
u2 v2 1
II qav bu 2 a2 b2
u2 v2 1
knII q
I q
a2e 2abf b2ga2E 2abF b2G
; 1
kn
av bu 2 a2 b2
u2 v2 1av bu 2 a2 b2
u2 v2 1kn 1
5.3 A curvatura Gaussiana e a curvatura média em coordenadas locais
Definição 5.6: Seja X : U 2 M M 3 ou M L3 uma superfície tipo
espaço de M. A curvatura Gaussiana K e a curvatura média H de X em q são as funções
K, H : U definidas por:
K det dN q 5.8
H 12 tra dN q 5.9
onde tra é o traço da matriz da aplicação linear dN.
Proposição 5.2: A curvatura Gaussiana e a curvatura média de uma superfície tipo
espaço X u, v em M em função das curvaturas principais são dadas por:
K k1k2 5.10
H 12 k1 k2 5.11
Demonstração: Como dN q é uma aplicaçao linear auto-adjunta, existe uma base
ortonormal e1, e2 de TqX tal que

43
dN q e1 k1e1
dN q e2 k2e25.12
onde k1 e k2 são as curvaturas principais.
Assim, a matriz da aplicação linear dN q com relação a esta base e1, e2 é:
k1 00 k2
Portanto, temos:
K detk1 00 k2
k1k2
H 12 tra
k1 00 k2
12 k1 k2
Teorema 5.1: Seja X : U 2 M M 3 ou M L3 uma superfície tipo
espaço X de M. Então a curvatura Gaussiana K e a curvatura média H de X são dadas por:
K eg f2
EG F2
H 12
eG 2fF gEEG F2
onde e, f, g são os coeficientes da segunda forma fundamental de X e E, F, G são os coeficientes
da primeira forma fundamental de X.
Demonstração: Vamos calcular K e H utilizando a base Xu, Xv associada à
parametrização X u, v de X.
Assim, temos que N, N .
Logo, Nu, N Nv, N 0
Portanto, Nu e Nv pertencem a TqX, e assim podemos escrever:
Nu a11Xu a21Xv
Nv a12Xu a22Xv5.13
e, portanto,
dN a11u a12v Nu a21u a22v Nv
que pode ser escrito na forma matricial como
dNuv
a11 a12
a21 a22
uv
Isto mostra que na base Xu, Xv , dN é dada pela matriz a ij , i, j 1,2.
Para obter os valores de a ij em termos dos coeficientes da primeira e segunda forma

44
fundamentais a partir de (5.13), temos:
e Nu, Xu a11E a21Ff Nu, Xv a11F a21Gf Nv, Xu a12E a22Fg Nv, Xv a12F a22G
5.14
As relações (5.14) podem ser expressas em forma matricial por
e ff g
a11 a21
a12 a22
E FF G
5.15
de onde temos
a11 a21
a12 a22
e ff g
E FF G
1
em queE FF G
1
é a matriz inversa deE FF G
E FF G
1E FF G
x yw z
1 00 1
que resulta em
Ex Fw 1Fx Gw 0
eEy Fz 0Fy Gz 1
Resolvendo os sistemas lineares acima temos,
x GEG F2 , y F
EG F2 , z FEG F2 , w E
EG F2
Logo, a matriz inversa será:
E FF G
1
1EG F2
G FF E
Temos então que
a11 a21
a12 a22
e ff g
1EG F2
G FF E
a11 a21
a12 a22
1EG F2
e ff g
G FF E
a11 a21
a12 a22
1EG F2
Ge Ff fE FeGf Fg gE Ff
e daí decorrem as seguintes expressões para os coeficientes a ij da matriz sw dN na base
Xu, Xv :

45
a11fF eGEG F2
a12eF fEEG F2
a21gF fGEG F2
a22fF gEEG F2
5.16
As equações (5.13), com os valores obtidos em (5.16), são conhecidas como
equações de Weingarten, que podem ser escritas da seguinte forma:
NufF eGEG F2 Xu
eF fEEG F2 Xv
NvgF fGEG F2 Xu
fF gEEG F2 Xv
Utilizando (5.16) em (5.8) e (5.9), obtemos:
K q det dNq det
fF eGEG F2
eF fEEG F2
gF fGEG F2
fF gEEG F2
fF eGEG F2
fF gEEG F2
eF fEEG F2
gF fGEG F2
fF eG fF gE eF fE gF fGEG F2 2
Logo,
K ge f2
GE F2 5.17
e ainda,
H q 12 tra a ij
12 tra
fF eGEG F2
eF fEEG F2
gF fGEG F2
fF gEEG F2
12
fF eGEG F2
fF gEEG F2
12
fF eG fF gEEG F2
Logo,

46
H 12
eG 2fF gEEG F2 5.18
Corolário 5.1: As curvaturas principais são raízes da equação quadrática
k2 2 Hk K 0
Portanto,
k H H 2 K
Demonstração: De (5.12) sabemos que k1 e k2 são autovalores de dN, portanto,
satisfazem a equação
dN v k v kI v
para algum v T q X, v 0 em que I é a matriz identidade. Como a aplicação linear dN kI não
possui inversa, esta possui determinante nulo, isto é,
deta11 k a12
a21 a22 k0
ka11 ka22 a11a22 k2 a12a21 k2 a22 a11 k a11a22 a12a21 0
ou
k2 k tra dN det dN 0
Retornando a (5.8) e (5.9), obtemos
k2 2 Hk K 0 5.19
e, portanto,
k H H 2 K 5.20
Pode-se com isso dizer que a curvatura gaussiana K é o produto das curvaturas
principais k1 e k2,
K k1 k2 5.21
e a curvatura média H é o valor médio das curvaturas principais k1 e k2
H 12 k1 k2 5.22
Pode-se resumir as fórmulas para as métricas Euclidiana e de Lorentz-Minkowski no
seguinte quadro:

47
Forma genérica 3 L3
I q a2E 2abF b2G a2E 2abF b2G a2E 2abF b2GII q a2e 2abf b2g a2e 2abf b2g a2e 2abf b2g
knIIq
Iqkcos kcosh
K ge f2
GE F2ge f2
GE F2ge f2
GE F2
H 12
eG 2fF gEEG F2
12
eG 2fF gEEG F2
12
eG 2fF gEEG F2
k1, k2 H H2 K H H2 K H H2 K
QUADRO 5.1 Fórmulas para cálculo da geometria de superfícies em 3 e L3.
Exemplo 5.6 Consideremos a superfície X u, v r cos u, r sinu, v , u, v 2 que
descreve o cilindro circular reto de raio r, S x, y, z 3;x2 y2 1 , vamos encontrar:
curvatura gaussiana K , curvatura média H e curvaturas principais k1 e k2 .
E r2; F 0; G 1
I q a2r2 b2
e r; f 0; g 0
II q a2r
kna2r
a2r2 b2
K ge f2
GE F2
K 0
H 12
eG 2fF gEEG F2
12
rr2
H 12r
k H H2 K 12r
12r
2
12r
12r ,
Logo, k11r e k2 0.
Observa-se que K k1 k2 0 e k1 k22 H
Exemplo 5.7 Considere o pseudo espaço hiperbólico H2 1 . Vamos encontrar:
curvatura gaussiana K , curvatura média H e curvaturas principais k1 e k2 .
E 1 v2
1 u2 v2 ; F uv1 u2 v2 ; G 1 u2
1 u2 v2

48
Iqav bu 2 a2 b2
u2 v2 1
e v2 1u2 v2 1
; f uvu2 v2 1
; g u2 1u2 v2 1
II qav bu 2 a2 b2
u2 v2 1kn 1
K ge f2
GE F2
u2 1u2 v2 1
v2 1u2 v2 1
uvu2 v2 1
2
1 u2
1 u2 v21 v2
1 u2 v2uv
1 u2 v2
2
1
H 12
eG 2fF gEEG F2
12
v2 1u2 v2 1
1 u2
1 u2 v2 2 uvu2 v2 1
uv1 u2 v2
u2 1u2 v2 1
1 v2
1 u2 v2
1 u2
1 u2 v21 v2
1 u2 v2uv
1 u2 v2
2
1
k H H2 K 1 1 2 1
k1 k2 1

49
6 LINHAS DE CURVATURA E LINHAS ASSINTÓTICAS
Definição 6.1: Se uma curva regular e conexa em X é tal que para todo q a
reta tangente a é uma direção principal em q, então dizemos que é uma linha de curvatura de
X.
Proposição 6.1 (TENENBLAT, 1990 [20]): Sejam X u, v uma superfície
parametrizada regular e q u0, v0 um ponto de X u, v . Um vetor não nulo
w aoXn q boXn q é uma direção principal de curvatura principal ko, se e somente se, ao e bo
satisfazem o sistema de equações:
eo koEo ao fo koFo bo 0fo koFo ao go koGo bo 0
6.1
Proposição 6.2: (Olinde Rodrigues) Seja X : U M M 3 ou M L3 uma
superfície parametrizada regular e t X u t , v t , t I uma curva regular em X u, v .
Então, é uma linha de curvatura de X u, v (FIGURA 6.1) se, e somente se, existe uma função
t , t I, tal que para todo t I, temos:ddt N t t t 0
onde N t N u t , v t é o vetor normal de superfície em u t , v t , t I.
Geometricamente significa dizer que, como dN pode assumir qualquer direção, esta
pode estar na direção de t , e se isto ocorrer, ou seja, se dN é um múltiplo de t , e aí dN e
t são linearmente dependentes, é uma linha de curvatura.
Neste caso, a função t kn t é uma curvatura principal de X em u t , v t ,
para todo t I e kn é a curvatura normal na direção dx das linhas de curvatura.
Demonstração: Suponhamos que é uma linha de curvatura. Considerando
t kn t , vamos provar que para todo t, o vetor tangente a X em q u t , v t , definido
por:
w ddt N t t t
é nulo.

50
FIGURA 6.1 Linha de curvatura de uma superfície regular.
De fato, como w t Nuu Nvv kn t Xuu Xvv , das relações que
definem os coeficientes das formas fundamentais após multiplicar ambos os membros por Xu e
efetuar o produto interno, segue que:
w, Xu eu fv kn t Eu Fv
eu fv kn t Eu kn t Fv
e kn t E u f kn t F v
e
w, Xv fu gv kn t Fu Gv
fu gv kn t Fu kn t Gv
f kn t F u g kn t G v
Como kn é uma direção principal, decorre de (6.1) que:
w, Xu e knE u f knF v 0w, Xv f knF u g knG v 0
logo, w, Xu w, Xv 0, isto é, w t 0 para todo t.
Portanto, ddt N t t t 0, onde t kn t (pela proposição 6.2).
Reciprocamente, se ddt N t t t 0, então o produto interno Xu, Xv se
anula, isto é, ainda de (6.1):
e t E u f t F v 0f t F u g t G v 0
Portanto, segue da relação (6.1) que t é uma direção principal de X em
u t , v t , cuja curvatura principal é t , ou seja, t kn t , donde se conclui que t é

51
uma linha de curvatura.
Como subproduto, temos que a equação diferencial
dN kndx 0
onde kn é a curvatura normal na direção dx das linhas de curvatura e dx é uma direção qualquer da
superfície X u, v .
Pela equação (5.19) das direções principais, k2 2 H q k K q 0, podemos,
segundo Erviti, Torrano(2006, p.53)[7], escrever
detk2 2 kE F Ge f g
0 6.2
De fato:
Partindo de kne 2fx gx2
E 2Fx Gx2 e derivando com respeito a x, temos,
kn2f 2gx
E 2Fx Gx2e 2xf gx2 2F 2Gx
E 2Fx Gx2 2 0
2f 2gxE 2Fx Gx2
e 2xf gx2 2F 2GxE 2Fx Gx2 2
2f 2gxe 2xf gx2 2F 2Gx
E 2Fx Gx2
2 f gx2 F Gx
e 2xf gx2
E 2Fx Gx2
daí,f gx
F Gxe 2fx gx2
E 2Fx gx2 6.3
é claro que e 2fx gx2 e fx x f gx e E 2Fx gx2 E Fx x F Gx
então, kne fx x f gx
E Fx x F Gx
kn x e 2fx gx2
E 2Fx Gx2f gx
F Gxx f gx
x F Gxe 2fx gx2 x f gx
E 2Fx gx2 x F GxLogo,
kn x f gxF Gx
e fxE Fx
e fx F Gx f gx E Fx
eF eGx fFx fGx2 fE fFx gEx gFx2
x2 gF fG x gE eG fE eF 0
De x2 gF fG x gE eG fE eF 0, fazendo CE 2BF AG 0
(equação diferencial da I forma fundamental) e voltando ao determinante (6.2), temos:

52
gF fG x2 A gF fG
gE eG x B gE eG
fE eF 1 C fE eF
Assim, a equação diferencial das linhas de curvatura é:
CE 2BF AG 0
fE eF Xu, Xu gE eG Xu, Xv gF fG Xv, Xu 0
fE eF u 2 gE eG u v gF fG v 2 0 6.4
que finalmente se memoriza melhor resolvendo o determinante:
detv 2 u v u 2
E F Ge f g
0 6.5
Definição 6.2: Seja X : U M M 3 ou M L3 uma superfície e q U.
Uma direção assintótica de X em q é uma direção w T q X tal que a curvatura normal kn w 0
na direção w.
Definição 6.3: Uma curva t X u t , v t sobre uma superfície X u, v é uma
linha assintótica de X, se para todo t I , o vetor t é uma direção assintótica (FIGURA
6.2).
Podemos determinar a quantidade de direções assintóticas em q em termos da
curvatura Gaussiana K em q.
Proposição 6.3: Seja t X u t , v t , t I uma curva sobre uma superfície
X u, v . Então, t é uma linha assintótica (FIGURA 6.2) se, e somente se, as funções u t e v t
satisfazem a equação
e u 2 2fu v g v 2 0 6.6
onde e, f, g são os coeficientes da segunda forma fundamental de X em u t , v t .

53
FIGURA 6.2 Direção assintótica e linha assintótica de uma superfície regular.
Demonstração: Pela definição de linha assintótica, temos que é uma linha
assintótica de X se, e só se, kn t 0, para todo t I.
Assim,
kn t IIq e u 2 2fu v g v 2 0 6.7

54
7 SUPERFÍCIES MÍNIMAS EM 3 E MÁXIMAS TIPO ESPAÇO EM L3.
Definição 7.1 Uma superfície parametrizada regular X : U 2 M será chamada
superfície mínima se a sua curvatura média é identicamente nula, isto é, H 0.
Tais superfícies no espaço tridimensional de Lorentz-Minkowski foram estudadas por
Kobayashi (1983)[11] que as denominou superfícies máximas devido a curvatura Gaussiana K ser
sempre positiva, e posteriormente por Van de Woestijne (1990)[21] que classificou todas as
superfícies mínimas regradas, de revolução e de translação conhecidas, definindo-as como sendo
tipo espaço quando a forma quadrática EG F2 0 e caso contrário, denominou-as de superfícies
Lorentzianas.
Aledo, Galvez (2003)[2] e Lopes(2002)[13] mostram que a partir das representações
de Weierstrass sobre cada superfície em 3 se obtêm as parametrizações dos diversos tipos de
superfícies que constituem cada família em L3.
Lopes (2003, p.57)[12] demonstra que:
Teorema 7.1 Existe uma correspondência entre as superfícies máximas do tipo
espaço do L3 e as mínimas do 3.
A representação do teorema acima não nos garante, porém, uma unicidade na
correspondência, já que a mesma superfície pode ser obtida através de mais de uma representação
de Weierstrass.
De acordo com o tipo de superfícies obtidas a partir do movimento de curvas,
pode-se encontrar os seguintes tipos:1. Superfícies de revolução: As superfícies de revolução formam uma das classes mais
simples de superfícies não triviais. Uma superfície de revolução é uma superfície obtidapor rotação de uma curva plana, chamada curva geratriz, em torno de uma reta nesse plano,a que se chama eixo de revolução. Por exemplo, o parabolóide (FIGURA 7.2) obtido pelarotação de uma parábola fixa no vértice em torno de seu eixo de simetria.
0
y
-2-4
24
0
20
4
z
x -4-2
2
40
0

55
FIGURA 7.1 Parabolóide
2. Superfícies regradas: Uma superfície regrada é uma superfície gerada por uma retamovendo-se ao longo de uma curva chamada diretriz. Portanto, uma superfície regrada éuma união de retas chamadas retas diretoras da superfície. Como exemplo de superfícieregrada tem-se o hiperbolóide de uma folha (FIGURA 7.3).
FIGURA 7.2 Hiperbolóide de uma folha.
3. Superfície de translação: Uma superfície é gerada por translação quando uma curva sedesloca paralelamente a si mesma ou sobre outra curva plana usualmente normal àprimeira. Como exemplo, tem-se o parabolóide hiperbólico (FIGURA 7.4), obtido quandose desloca uma parábola com curvatura para dentro sobre uma hipérbole com curvaturapara fora.
-4
-20
4
-100
10
2
z
20
x0
y
-2-2-4
42
0
FIGURA 7.3 Parabolóide hiperbólico ou "sela de cavalo ".
Historicamente, os três primeiros exemplos de superfícies mínimas não triviais em
um espaço de euclideano tridimensional eram o catenóide, o helicóide e as superfícies mínimas de
translação. Juntamente com os planos, os catenóides são as únicas superfícies mínimas de
revolução, os helicóides as únicas superfícies mínimas regradas enquanto as superfícies de Scherk
são as únicas superfícies mínimas de translação.

56
Ao definir os diversos tipos de superfícies máximas, Van de Woestijne (1990)[21]
deu uma nova classificação às superfícies máximas em L3 enunciando e demonstrando os seguintes
teoremas:
Teorema 7.2. Toda superfície máxima de revolução tipo espaço em L3 é congruente
a parte de uma das seguintes superfícies:i. Plano tipo espaço;
ii. Catenóide de primeiro tipo;
iii. Catenóide de segundo tipo;
iv. Superfície de Enneper de segundo tipo.
Teorema 7.3. Toda superfície máxima regrada tipo espaço em L3 é congruente a
parte de uma das seguintes superfícies:i. Plano tipo espaço;
ii. Helicóide de primeiro tipo;
iii. Helicóide de segundo tipo;
iv. Superfície conjugada de Enneper de segundo tipo.
Teorema 7.4. Toda superfície máxima de translação tipo espaço em L3 é congruente
a parte de uma das seguintes superfícies:i. Plano tipo espaço;
ii. Superfície de Scherk de primeiro tipo.
As parametrizações a seguir não serão demonstradas neste trabalho. Tais formas são
descritas por Do Carmo(2005)[5], Kobayashi(1983)[11], Lopes(2002)[12], Tenenblat(1990)[20],
Van de Woestijne(1990)[21] e Walrave (1995, p.460[22]).
7.1 Catenóides
São superfícies de revolução obtidas através da rotação da catenária em torno de um
dos eixos do sistema x, y, z .

57
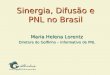
7.1.1 Catenóide em 3
Superfície obtida pela revolução da catenária em torno do eixo Ox. Sua
parametrização em 3 pode ser dada por:
X u, v u, coshu cos v, coshu sinv
FIGURA 7.4 Catenóide em 3.
Derivadas de ordem superior:
Xu 1, coshu cos v, sinhu sinv
Xv 0, coshu sinv, coshu cos v
Xuu 0,coshu cos v, coshu sinv
Xvv 0, coshu cos v, coshu sinv
Xuv 0, sinhu sinv, sinhu cos v
a) I Forma Fundamental:
E Xu, Xu 1 sinh2u cos2v sinh2u sin2v
1 sinh2u
E cosh2u
F Xu, Xv sinhu cos vcoshu sinv sinhu sinvcoshu cos v
F 0
G Xv, Xv 0 cosh2u sin2v cosh2u cos2v
G cosh2u
I q a2E 2abF b2G

58
a2 cosh2u 2ab 0 b2 cosh2u
I q a2 b2 cosh2u, a, b .
b) II Forma Fundamental:
EG F2 cosh2u cosh2u 0 cosh4u
EG F2 cosh2u
e 1EG F2
Xu Xv, Xuu1
cosh2u
1 sinhu cos v sinhu sinv0 coshu sinv coshu cos v0 coshu cos v coshu sinv
1cosh2u
cos2vcosh2u sin2vcosh2u
e 1
f 1EG F2
Xu Xv, Xuv1
cosh2u
1 sinhu cos v sinhu sinv0 coshu sinv coshu cos v0 sinhu sinv sinhu cos v
1cosh2u
coshu sinv sinhu cos v coshu cos v sinhu sinv
f 0
g 1EG F2
Xu Xv, Xvv1
cosh2u
1 sinhu cos v sinhu sinv0 coshu sinv coshu cos v0 coshu cos v coshu sinv
1cosh2u
cos2vcosh2u sin2vcosh2u
g 1
II q a2e 2abf b2g
II q a2 1 2ab 0 b2 1
II q b2 a2, a, b
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F21 1
cosh4uK 1
cosh4uComo em 3 todas as superfícies mínimas possuem curvatura gaussiana K 0,
todos os seus pontos são hiperbólicos.

59
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
12
1 cosh2u 0 1 cosh2uEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Knb2 a2
a2 b2 cosh2u, a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k2 2 0 k 1cosh4u
0
k2 1cosh4u
0
k2 1cosh4u
k11
cosh2ue k2
1cosh2u
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
gE eG u v 0
1 cosh2u 1 cosh2u 0
2cosh2u u v 0
u v 0
u 0 e v 0
As linhas de curvatura do catenóide são as curvas coordenadas - meridianos e
paralelos.
FIGURA 7.5 Linhas de curvatura do catenóide em 3.

60
e) Linhas Assintóticas
e u 2 2fu v g v 2 0
1 u 2 1 v 2 0
v 2 u 2
v u
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para u v
u v 1dudt 1
du dt
u t
Para u v
u v 1dudt 1
du dt
u t
Retornando a X u, v u, coshu cos v, coshu sinv , temos as linhas assintóticas:
C1 t t , cosh t cos t , cosh t sin t
C2 t t , cosh t cos t , cosh t sin t
onde , , e .

61
FIGURA 7.6 Linha assintótica do catenóide em 3.
7.1.2 Catenóide de primeiro tipo em L3
O catenóide de primeiro tipo em L3, também denominado por Yang, Kim(2006)[23]
catenóide elíptico, é obtido pela rotação da catenária em torno de um eixo tipo tempo. Pode ter
como parametrização:
X u, v u, sinv sinhu, cos v sinhu
FIGURA 7.7 Catenóide de primeiro tipo em L3.
Derivadas de ordem superior:
Xu 1, sinvcoshu, cos vcoshu
Xuu 0, sinv sinhu, cos v sinhu
Xv 0, sinhu cos v, sinhu sinv
Xvv 0, sinh u sinv, sinh u cos v
Xuv 0, coshu cos v, coshu sinv

62
a) I Forma Fundamental:
E Xu, Xu 1 1 sin2vcosh2u cos2vcosh2u
1 coshu sin2v cos2v
E sinh2u
F Xu, Xv 1 0 sinvcoshu sinhu cos v cos vcoshu sinhu sinv
F 0
G Xv, Xv 1 0 sinh2u cos2v sinh2u sin2v
sinh2u cos2v sin2v
G sinh2u
I q a2E 2abF b2G
a2 sinh2u 2ab 0 b sinh2u
I q a2 b2 sinh2u, a, b .
b) II Forma Fundamental:
EG F2 sinh2u sinh2u sinh4u
EG F2 sinh2u
e 1EG F2
Xu Xv, Xuu 11
sinh2u
1 sinvcoshu cos vcoshu0 sinhu cos v sinhu sinv0 sinv sinhu cos v sinhu
1sinh2u
cos2v sinh2u sin2v sinh2u 1sinh2u
sinh2u cos2v sin2v
e 1
f 1EG F2
Xu Xv, Xuv 11
sinh2u
1 sinvcoshu cos vcoshu0 sinhu cos v sinhu sinv0 coshu cos v coshu sinv
1sinh2u
sinhu cos vcoshu sinv coshu cos v sinhu sinv
f 0
g 1EG F2
Xu Xv, Xvv 11
sinh2u
1 sinvcoshu cos vcoshu0 sinhu cos v sinhu sinv0 sinhu sinv sinhu cos v
1sinh2u
cos2v sinh2u sin2v sinh2u 1sinh2u
sinh2u cos2v sin2v
g 1

63
II q a2e 2abf b2g
a2 1 2ab 0 b2 1
II q b2 a2, a, b .
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F21 1 0
sinh2u sinh2u 0K 1
sinh4uComo todas as superfícies máximas em L3 possuem curvatura gaussiana K 0,
todos os seus pontos são elíticos.
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
12
1 sinh2u 0 1 sinh2usinh4u
H 0
c.3) Curvatura Normal:
KnII q
I q
Kna2 b2
a2 b2 sinh2u, a, b
c.4) Curvaturas Principais:
k2 2Hk K 0
k H H2 K
k K 1sinh4u
k1 k21
sinh2u
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
1 sinh2u 1 sinh2u u v 0
2sinh2u u v 0
u v 0
u 0 e v 0
As linhas de curvatura do catenóide de primeiro tipo são as curvas coordenadas -
meridianos e paralelos.

64
FIGURA 7.8 Linhas de curvatura do catenóide de primeiro tipo em L3.
e) Linhas Assintóticas
e u 2 2fu v g v 2 0
1 u 2 1 v 2 0
v 2 u 2
v u
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para u v
u v 1dudt 1
du dt
u t
Para u v
u v 1dudt 1

65
du dt
u t
Retornando a X u, v , temos as linhas assintóticas:
C1 t t , sin t sinh t , cos t sinh t
C2 t t , sin t sinh t , cos t sinh t
onde , , e .
FIGURA 7.9 Linha assintótica do catenóide de primero tipo em L3.
7.1.3 Catenóide de segundo tipo em L3
O catenóide de segundo tipo em L3, também denominado catenóide hiperbólico, é
obtido pela revolução da catenária ao redor de um eixo tipo espaço. Sua parametrização pode ser
dada por:
X u, v coshu sinv, sinv sinhu, v
FIGURA 7.10 Catenóide de segundo tipo em L3.

66
Derivadas de ordem superior:
Xu sin v sinhu, sin v coshu, 0
Xuu sin v coshu, sin v sinhu, 0
Xv cosh u cos v, sinh u cos v, 1
Xvv cosh u sinv, sinh u sinv, 0
Xuv sinh u cos v, cosh u cos v, 0
a) I Forma Fundamental:
E Xu, Xu 1 sin2v sinh2u sin2vcosh2u 0
sin2v cosh2u sinh2u
E sin2v
F Xu, Xv 1 sinv sinhu coshu cos v sinvcoshu sinhu cos v 0
F 0
G Xv, Xv 1 cosh2u cos2v sinh2u cos2v 1
1 cos2v cosh2u sinh2u
G sin2v
I q a2E 2abF b2G
a2 sin2v 2ab 0 b2 sin2v
I q a2 b2 sin2v, a, b
b) II Forma Fundamental:
EG F2 sin2v sin2v sin4v
EG F2 sin2v
e 1EG F2
Xu Xv, Xuu 11
sin2v
sinv sinhu sinvcoshu 0coshu cos v sinhu cos v 1sinvcoshu sinv sinhu 0
1sin2v
sin2vcosh2u sin2v sinh2u 1sin2v
sin2v cosh2u sinh2u
e 1
f 1EG F2
Xu Xv, Xuv 11
sin2v
sinv sinhu sinvcoshu 0coshu cos v sinhu cos v 1sinhu cos v coshu cos v 0
1cosh2u
sinhu sinvcoshu cos v coshu sinv sinhu cos v
f 0

67
g 1EG F2
Xu Xv, Xvv 11
sin2v
sinv sinhu sinvcoshu 0coshu cos v sinhu cos v 1
coshu sinv sinhu sinv 0
1sin2v
sin2vcosh2u sin2v sinh2u 1sin2v
sin2v cosh2u sinh2u
g 1
II q a2e 2abf b2g
a2 1 2ab 0 b2 1
II q a2 b2, a, b .
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F21 1 0
sin2v sin2vK 1
sin4vc.2) Curvatura Média:
H 12
eG 2fF EgEG F2
12
1 sin2v 0 1 sin2vEG F2
H 0
c.3) Curvatura Normal:
KnIIq
Iq
Kna2 b2
a2 b2 sin2v, a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k H H2 K
k K 1sin4v
k1 k21
sin2v
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
1 sin2u 1 sin2u u v 0
2sin2u u v 0
u v 0

68
u 0 e v 0
As linhas de curvatura do catenóide de segundo tipo são as curvas coordenadas -
meridianos e paralelos.
FIGURA 7.11 Linhas de curvatura do catenóide de segundo tipo em L3.
e) Linhas Assintóticas
e u 2 2fu v g v 2 0
1 u 2 1 v 2 0
v 2 u 2
v u
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para v u :
v u 1dvdt 1
dv dt dv dt
v t
Para u v
u v 1dudt 1
du dt
u t
Para u v

69
u v 1dudt 1
du dt
u t
Retornando a X u, v coshu sinv, sinv sinhu, v , temos as linhas assintóticas:
C1 t cosh t sin t , sin t sinh t , t
C2 t cosh t sin t , sin t sinh t , t
onde , , e .
FIGURA 7.12 Linha assintótica do catenóide de segundo tipo em L3.
7.1.4 Catenóide de terceiro tipo em L3
O catenóide de terceiro tipo em L3, também denominado catenóide parabólico, é
obtido pela revolução da catenária ao redor do outro eixo tipo espaço. Sua parametrização, segundo
Van de Woestijne( 1990, p. 350)[21] é dada por:
X u, v v, cos vcos u, cos v sinu
FIGURA 7.13 Catenóide de terceiro tipo em L3.

70
Derivadas de ordem superior:
Xu cos v sinu, cos vcos u, 0
Xuu cos vcos u, cos v sinu, 0
Xv sinvcos u, sinv sinu, 1
Xvv cos vcos u, cos v sinu, 0
Xuv sinv sinu, sinvcos u, 0
a) I Forma Fundamental:
E Xu, Xu 1 cos v sinu, cos vcos u, 0 , cos v sinu, cos vcos u, 0
cos v sinu 2 cos vcos u 2 02 cos2v sin2u cos2vcos2u
E cos2v
F Xu, Xv 1 cos v sinu cos u sinv cos u cos v sinu sinv
F 0
G Xv, Xv 1 cos2u sin2v sin2u sin2v 1
G cos2v
EG F2 cos2v cos2v 0 cos4v
Como a forma quadrática EG F2 0, onde podemos concuir que a referida
superfície não é tipo espaço.
O quadro abaixo compara os resultados obtidos para a família de catenóides.
Parâmetros 3 Primeiro tipo em L3 Segundo tipo em L3
E cosh2u sinh2u sin2vF 0 0 0G cosh2u sinh2u sin2ve 1 1 1f 0 0 0g 1 1 1
K 1cosh4u
1sinh4u
1sin4v
Kna2 b2
a2 b2 cosh2ua2 b2
a2 b2 sinh2ua2 b2
a2 b2 sin2v
k11
cosh2u1
sinh2u1
sin2vk2
1cosh2u
1sinh2u
1sin2v
QUADRO 7.1 Comparativo da família de catenóides.

71
7.2 Helicóides
Definição 7.2 Sejam X u, v e X u, v , u, v U 2, superfícies simples.
Dizemos que X e X são superfícies isométricas, se para todo u, v U os coeficientes da
primeira forma quadrática de X e X coincidem, isto é, E u, v E u, v , F u, v F u, v ,
G u, v G u, v .
7.2.1 Helicóide em 3
Considere uma hélice cilíndrica dada por t a cos t, a sin t, bt , t , a 0 e
b 0. Por cada ponto da hélice pode-se traçar uma reta paralela ao plano xy e que intersecta o eixo
Oz. A superfície gerada por essas retas é chamada helicóide. É uma superfície regrada obtida pela
isometria do catenóide (FIGURA 7.18), cuja parametrização pode ser dada por:
X u, v u cos v, u sinv, v
FIGURA 7.14 Helicóide em 3.

72
FIGURA 7.15 Deformação isométrica do catenóide em helicóide.
Para se verificar a isometria entre o catenóide e o helicóide, é necessária uma
mudança de parâmetro na equação acima para que as duas superfícies sejam compatíveis. Assim,
fazendo
v v e u a sinhu, 0 v 2 e u ,
mudança esta que é possível uma vez que a aplicação é evidentemente bijetora, e o Jacobiano
u ,uu, v a coshu 0
logo, uma nova representação paramétrica do helicóide, tomando a 1, é:
X u, v sinhu cos v, sinhu sinv, v
a) I Forma Fundamental:
E Xu, Xu cosh2u
F Xu, Xv 0
G Xv, Xv cosh2u
I q a2E 2abF b2G
I q a2 b2 cosh2u, a, b .
Comparando os resultados obtidos acima com aqueles obtidos para o catenóide em3, percebe-se que EC EH cosh2u, FC FH 0 e GC GH cosh2u, caracterizando,
então, que as superfícies são localmente isométricas.
b) II Forma Fundamental:

73
EG F2 cosh2u cosh2u 0 cosh4u
EG F2 cosh2u
e 1EG F2
Xu Xv, Xuu 0
f 1EG F2
Xu Xv, Xuv 1
g 1EG F2
Xu Xv, Xvv 0
II q a2e 2abf b2g
II q 2ab, a, b .
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 1cosh4u
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kn2ab
a2 b2 cosh2u, a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k11
cosh2ue k2
1cosh2u
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
cosh2u v 2 cosh2u u 2
u 2 v 2
v u
Para v u :
v t

74
Para v u :
v t
Para u v
u t
Para u v :
u t
Retornando a X u, v sinhu cos v, sinhu sinv, v , temos as linhas de curvatura:
C1 t sinh t cos t , sinh t sin t , t
C1 t sinh t cos t , sinh t sin t , t
onde , , e .
FIGURA 7.16 Linha de curvatura do helicóide em 3.
e) Linhas Assintóticas
e u 2 2fu v g v 2 0
u v 0
As linhas assintóticas do helicóide são as curvas coordenadas - meridianos e
paralelos.
FIGURA 7.17 Linhas assintóticas do helicóide em 3.

75
7.2.2 Helicóide de primeiro tipo em L3
Superfície conjugada ao catenóide de primeiro tipo em L3, o helicóide de primeiro
tipo, ou helicóide elíptico é uma superfície regrada cuja parametrização pode ser dada por:
X u, v v, coshu cos v, coshu sinv
FIGURA 7.18 Helicóide de primeiro tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 sinh2u
F Xu, Xv 1 0
G Xv, Xv 1 sinh2u
I q a2E 2abF b2G
I q a2 b2 sinh2u, a, b
Comparando os resultados obtidos para o catenóide e para o helicóide de primeiro
tipo em L3, percebe-se que a isometria entre a família de catenóides e a família de helicóides, tipo
a tipo, existe também no espaço tridimensional de Lorentz-Minkowski (MILANI, SHOJAEIFA,
2006[13]).

76
FIGURA 7.19 Deformação do catenóide de primeiro tipo em helicóide de primeiro tipo em L3.
b) II Forma Fundamental:
EG F2 sinh4u
EG F2 sinh2u
e 1EG F2
Xu Xv, Xuu 1 0
f 1EG F2
Xu Xv, Xuv 1 1
g 1EG F2
Xu Xv, Xvv 1 0
II q a2e 2abf b2g
II q 2ab, a, b .
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 1sinh4u
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q

77
Kn2ab
a2 b2 sinh2u, a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k21
sinh2u
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
1 sinh2u u 2 1 sinh2u v 2 0
sinh2u u 2 sinh2u v 2
u 2 v 2
u v
Para v u :
v t
Para v u :
v t
Para u v
u t
Para u v
u t
Retornando a X u, v v, cos vcoshu, coshu sinv , temos as linhas de
curvatura:
C1 t t , cos t cosh t , cosh t sin t
C2 t t , cos t cosh t , cosh t sin t
onde , , e .
FIGURA 7.20 Linha de curvatura do helicóide de primeiro tipo em L3.

78
e) Linhas Assintóticas:
e u 2 2f u v g v 2 0
2 u v 0
u v 0
u 0 e v 0
As linhas assintóticas do helicóide de primeiro tipo são as curvas coordenadas -
meridianos e paralelos
FIGURA 7.21 Linhas assintóticas do helicóide de primeiro tipo em L3.
7.2.3 Helicóide de segundo tipo em L3
Superfície conjugada ao catenóide de segundo tipo em L3, o helicóide de segundo
tipo, ou helicóide hiperbólico, é uma superfície regrada cuja parametrização pode ser dada por:
X u, v cos v sinhu, cos vcoshu, u
FIGURA 7.22 Helicóide de segundo tipo em L3.

79
a) I Forma Fundamental:
E Xu, Xu 1 cos2vcosh2u cos2v sinhu 1
1 cos2v cosh2u sinh2u
E sin2v
F Xu, Xv 1 cos vcoshu sinhu sinv cos v sinhu cosh u sinv
F 0
G Xv, Xv 1 sin2v sinh2u sin2vcosh2u 0
sin2v sinh2u cosh2u
G sin2v
I q a2E 2abF b2G
a2 sin2v 2ab 0 b2 sin2v
I q a2 b2 sin2v, a, b
b) II Forma Fundamental:
EG F2 sin2v sin2v sin4v
EG F2 sin2v
e 1EG F2
Xu Xv, Xuu 1 0
f 1EG F2
Xu Xv, Xuv 1 1
g 1EG F2
Xu Xv, Xvv 1 0
II q a2e 2abf b2g
II q 2ab, a, b
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 1sin4v
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0

80
c.3) Curvatura Normal:
KnII q
I q
Kn2ab
a2 b2 sin2v, a, b
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k21
sin2v
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
1 sin2v u 2 1 sin2v v 2 0
sin2u u 2 sin2u v 2
u 2 v 2
u v
Para v u :
v t
Para v u :
v t
Para u v :
u t
Para u v :
u t
Retornando a X u, v cos v sinhu, cos vcoshu, u , temos as linhas de curvatura:
C1 t cos t sinh t , cos t cosh t , t
C2 t cos t sinh t , cos t cosh t , t
onde , , e .

81
FIGURA 7.23 Linha de curvatura do helicóide de segundo tipo em L3.
e) Linhas Assintóticas
e u 2 2f u v g v 2 0
2 1 u v 0
u 0 e v 0
As linhas de curvatura do helicóide tipo 2 são as curvas coordenadas - meridianos e
paralelos.
FIGURA 7.24 Linhas assintóticas do helicóide de segundo tipo em L3.
7.2.4 Helicóide de terceiro tipo em L3
Superfície conjugada ao catenóide do terceiro tipo em L3, o helicóide do terceiro tipo,
também chamado helicóide parabólico, é uma superfície regrada com parametrização:
X u, v u coshv, u sinhv, v
FIGURA 7.25 Helicóide de terceiro tipo em L3.

82
a) I Forma Fundamental:
E Xu, Xu 1 1
F Xu, Xv 1 0
G Xv, Xv 1 u2 1
EG F2 1 u2 1 u2 1
Como a forma quadrática EG F2 0, esta não é uma superfície tipo espaço.
O quadro abaixo compara os resultados obtidos para a família de helicóides.
Parâmetros 3 Primeiro tipo em L3 Segundo tipo em L3
E cosh2u sinh2u sin2vF 0 0 0G cosh2u sinh2u sin2ve 0 0 0f 1 1 1g 0 0 0
K 1cosh4u
1sinh4u
1sin4v
Kn2ab
a2 b2 cosh2u2ab
a2 b2 sinh2u2ab
a2 b2 sin2u
k11
cosh2u1
sinh2u1
sin2vk2
1cosh2u
1sinh2u
1sin2v
QUADRO 7.2 Comparativo da família de helicóides
7.3 Superfícies de Enneper
7.3.1 Superfície de Enneper em 3
A superfície de Enneper em 3 é a superfície parametrizada
X u, v u u3
3 uv2, v v3
3 vu2, u2 v2 , u, v 2.
De acordo com Do Carmo(2005, p.243)[5], a verificação de que a superfície de
Enneper é uma superfície mínima não apresenta maiores dificuldades. Ao se trocar u, v por
v, u , troca-se, na superfície x, y, z por y, x, z . Assim, ao se efetuar uma rotação positiva de
2 em torno do eixo Oz seguida de uma simetria no plano xy, a superfície permanece invariante.

83
Outra carcterística interessante desta superfície definida por Alfred Enneper
(1830-1885) é que ela possui auto interseções como se pode ver na figura 7.26.
FIGURA 7.26 Superfície de Enneper em 3.
a) I Forma Fundamental:
E Xu, Xu u2 v2 1 2
F Xu, Xv 0
G Xv, Xv u2 v2 1 2
I q a2E 2abF b2G
I q a2 b2 u2 v2 1 2, a, b
b) II Forma Fundamental:
EG F2 u2 v2 1 4
EG F2 u2 v2 1 2
e 1EG F2
Xu Xv, Xuu 2
f 1EG F2
Xu Xv, Xuv 0
g 1EG F2
Xu Xv, Xvv 2
II q a2e 2abf b2g
II q 2 a2 b2 , a, b .
c) Curvaturas:

84
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 4u2 v2 1 4
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kn2 a2 b2
a2 b2 u2 v2 1 2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k12
u2 v2 1 2 e k22
u2 v2 1 2
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
2 u2 v2 1 2 2 u2 v2 1 2 u v 0
4 u2 v2 1 2 u v 0
u v 0
u v 0
As linhas de curvatura da superfície de Enneper em 3 são as curvas coordenadas -
meridianos e paralelos.
FIGURA 7.27 Linhas e curvatura da superfície de Enneper em 3.

85
e) Linhas assintóticas
e u 2 2fu v g v 2 0
2 u 2 2 v 2 0
2 u 2 2 v 2
v u
Para v u :
v t
Para v u :
v t
Para u v :
u t
Para u v :
u t
Retornando a X u, v u u3
3 uv2, v v3
3 vu2, u2 v2 , temos as linhas
assintóticas:
C1 t t t 3
3 t t 2, t t 3
3 t t 2,
t 2 t 2
C2 t t t 3
3 t t 2, t t 3
3 t
t 2, t 2 t 2
onde , , e .
FIGURA 7.28 Linha assintótica da superfície de Enneper em 3.
Observa-se pela (FIGURA 7.29) que as linhas assintóticas u v u v constante

86
7.3.2 Superfície de Enneper de primeiro tipo em L3
A superfície de Enneper de primeiro tipo em L3 é a superfície parametrizada
X u, v u2 v2, u u3
3 uv2, v u2v v3
3 , u, v 2 e u2 v2 1.
FIGURA 7.29 Superfície de Enneper de primeiro tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 u2 v2 1 2
F Xu, Xv 1 0
G Xv, Xv 1 u2 v2 1 2
I q a2E 2abF b2G
I q a2 b2 u2 v2 1 2, a, b .
b) II Forma Fundamental:
EG F2 u2 v2 1 4
EG F2 u2 v2 1 2
e 1EG F2
Xu Xv, Xuu 1 2
f 1EG F2
Xu Xv, Xuv 1 0
g 1EG F2
Xu Xv, Xvv 1 2
II q a2e 2abf b2g
II q 2 a2 b2 , a, b .

87
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 4u2 v2 1 4
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnIIq
Iq
Kn2 a2 b2
a2 b2 u2 v2 1 2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k22
u2 v2 1 2
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
2 u2 v2 1 2 2 u2 v2 1 2 u v 0
4 u2 v2 1 2u v 0
u v 0
u v 0
As linhas de curvatura da superfície de Enneper de primeiro tipo são as curvas
coordenadas - meridianos e paralelos.

88
FIGURA 7.30 Linhas e curvatura da superfície de Enneper de primeiro tipo em L3.
e) Linhas assintóticas
e u 2 2fu v g v 2 0
2 u 2 2 v 2 0
2 u 2 2 v 2
v u
Para v u :
v t
Para v u :
v t
Para u v :
u t
Para u v :
u t
Retornando a X u, v u2 v2, u u3
3 uv2, v u2v v3
3 , temos as linhas
assintóticas:
C1 t t 2 t 2, t t 3
3 t t 2, t t 2
t t 3
3
C2 t t 2 t 2, t t 3
3 t v2, t t 2
t t 3
3
onde , , e .

89
FIGURA 7.31 Linha assintótica da superfície de Enneper de primeiro tipo em L3.
7.3.3 Superfície de Enneper conjugada de primeiro tipo em L3
É a superfície parametrizada
X u, v 2uv, v u2v v3
3 , u3
3 uv2 u
FIGURA 7.32 Superfície de Enneper conjugada de primeiro tipo em L3.
a) I forma fundamental
E Xu, Xu 1 u2 v2 1 2
F Xu, Xv 1 0
G Xv, Xv 1 u2 v2 1 2
I q a2E 2abF b2G
I q u2 v2 1 2 a2 b2 , a, b

90
b) II forma fundamental
EG F2 u2 v2 1 4
EG F2 u2 v2 1 2
e 1EG F2
Xu Xv, Xuu 1 0
f 1EG F2
Xu Xv, Xuv 1 2
g 1EG F2
Xu Xv, Xvv 1 0
II q a2e 2abf b2g
II q 4ab, a, b
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 4u2 v2 1 4 , u2 v2 1.
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kn4ab
u2 v2 1 2 a2 b2, a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k22
u2 v2 1 2 , u2 v2 1.
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
v u
Para v u :

91
v t
Para v u :
v t
Para u v
u t
Para u v
u t
Retornando a X u, v 2uv, v u2v v3
3 , u3
3 uv2 u , temos as linhas
assintóticas:
C1 t 2 t t , t t 2 t t 3
3 , t 3
3 t t 2
t
C2 t 2 t t , t t 2 t t 3
3 , t 3
3 t t
t
onde , , e .
FIGURA 7.33 Linhas de curvatura da superfície de Enneper conjugada de primeiro tipo.
e) Linhas assintóticas
e u 2 2fu v g v 2 0
u v 0
As linhas assintóticas da superfície de Enneper conjugada de segundo tipo são as
curvas coordenadas - meridianos e paralelos.

92
FIGURA 7.34 Linhas assintóticas da superfície de Enneper conjugada de pimeiro tipo.
7.3.4 Superfície de Enneper de segundo tipo em L3
A superfície de Enneper de segundo tipo em L3 é a superfície parametrizada
X u, v u3
3 uv2 u, u u3
3 uv2, 2uv , u, v 2, u 0.
FIGURA 7.35 Superfície de Enneper de segundo tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 4u2
F Xu, Xv 1 0
G Xv, Xv 1 4u2
I q a2E 2abF b2G
I q 4u2 a2 b2 , a, b .

93
b) II Forma Fundamental:
EG F2 4u2 4u2 16u4
EG F2 4u2
e 14u2 Xu Xv, Xuu 1 2
f 1EG F2
Xu Xv, Xuv 1 0
g 1EG F2
Xu Xv, Xvv 1 2
II q a2e 2abf b2g
II q 2 a2 b2 , a, b
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 14u4 , u 0.
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kna2 b2
2u2 a2 b2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k21
2u2 , u 0.
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
2 4u2 2 4u2 u v 0
u v 0
u v 0
As linhas de curvatura da superfície de Enneper de segundo tipo são as curvas
coordenadas - meridianos e paralelos.

94
FIGURA 7.36 Linhas e curvatura da superfície de Enneper de segundo tipo em L3.
e) Linhas assintóticas
e u 2 2fu v g v 2 0
2 u 2 2 v 2 0
2 u 2 2 v 2
v u
Para v u :
v t
Para v u :
v t
Para u v
u t
Para u v
u t
Retornando a X u, v u3
3 uv2 u, u u3
3 uv2, 2uv , temos as linhas
assintóticas:
C1 t t 3
3 t t 2 1 , t 3
3 t 1 t 2 , 2 t t
C2 t t 2 t 2, t t 3
3 t v2, t t 2
t t 3
3
onde , , e .

95
FIGURA 7.37 Linha assintótica da superfície de Enneper de segundo tipo em L3.
7.3.5 Superfície de Enneper conjugada de segundo tipo em L3
É a superfície parametrizada
X u, v u2v v3
3 v, v u2v v3
3 , u2 v2
FIGURA 7.38 Superfície de Enneper conjugada de segundo tipo em L3.
a) I forma fundamental
E Xu, Xu 1 4u2
F Xu, Xv 1 0
G Xv, Xv 1 4u2
I q a2E 2abF b2G
I q 4u2 a2 b2 , a, b

96
b) II forma fundamental
EG F2 16u4
EG F2 4u2
e 1EG F2
Xu Xv, Xuu 1 0
f 1EG F2
Xu Xv, Xuv 1 2
g 1EG F2
Xu Xv, Xvv 1 0
II q a2e 2abf b2g
II q 4ab, a, b
c) Curvaturas:
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K 14u4 , u 0.
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Knab
u2 a2 b2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k21
2u2 , u 0.
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
v u
Para v u :
v t
Para v u :

97
v t
Para u v
u t
Para u v
u t
Retornando a X u, v u2v v3
3 v, v u2v v3
3 , u2 v2 , temos as linhas
assintóticas:
C1 t t 2 t t 3
3 t , t t 2 t t 3
3 , t 2
t 2
C2 t t 2 t t 3
3 t , t t 2 t t 3
3 ,
t 2 t 2
onde , , e .
FIGURA 7.39 Linhas de curvatura da superfície de Enneper conjugada de segundo tipo em L3.
e) Linhas assintóticas
e u 2 2fu v g v 2 0
u v 0
As linhas assintóticas da superfície de Enneper conjugada de segundo tipo são as
curvas coordenadas - meridianos e paralelos.

98
FIGURA 7.40 Linhas assintóticas da superfície de Enneper conjugada de segundo tipo em L3.
7.3.6 Superfície de Enneper de terceiro tipo em L3
A superfície de Enneper de terceiro tipo em L3 é a superfície parametrizada por:
X u, v v3
3 u2v v, 2uv, v3
3 u2v v , u, v 2
FIGURA 7.41 Superfície de Enneper de terceiro tipo em L3.
a) I Forma Fundamental:
Para a parametrização desta superfície, Van de Woestijne utilizou a assinatura da
métrica dx2 dy2 dz2 .
E Xu, Xu 1 4v2
F Xu, Xv 1 0
G Xv, Xv 1 0
EG F2 0, logo, a superfície de Enneper de terceiro tipo não é uma superfície tipo espaço.
O quadro seguinte compara os valores obtidos para as superfícies de Enneper.

99
Parâmetros 3 Primeiro tipo em L3 Conj. de 1o. tipo em L3
E u2 v2 1 2 u2 v2 1 2 u2 v2 1 2
F 0 0 0G u2 v2 1 2 u2 v2 1 2 u2 v2 1 2
e 2 2 0f 0 0 2g 2 2 0
K 4u2 v2 1 4
4u2 v2 1 4
4u2 v2 1 4
Kn2 a2 b2
a2 b2 u2 v2 1 22 a2 b2
a2 b2 u2 v2 1 24ab
a2 b2 u2 v2 1 2
k12
u2 v2 1 22
u2 v2 1 22
u2 v2 1 2
k22
u2 v2 1 22
u2 v2 1 22
u2 v2 1 2
Parâmetros Segundo tipo em L3 Conjugada de 2o. tipo em L3
E 4u2 4u2
F 0 0G 4u2 4u2
e 2 0f 0 2g 2 0
K 14u4
14u4
Kna2 b2
2u2 a2 b2ab
u2 a2 b2
k11
2u21
2u2
k21
2u21
2u2
QUADRO 7.3 Comparativo da família das superfícies de Enneper.
7.4 Superfícies de Scherk
7.4.1 Superfície de Scherk em 3
A superfície de Scherk em 3 é uma superfície de translação dada por
X u, v u, v, log cos vcos u , u, v 2, u, v 2 , .

100
FIGURA 7.42 Superfície de Scherk em 3.
A superfície de Scherk foi descoberta por Heinrich Ferdinand Scherk (1798-1885)
sobre um domínio em forma de tabuleiro de xadrez (GRAY, 1999[10]).
a) I Forma Fundamental:
E Xu, Xu sec2u
F Xu, Xv tanu tanv
G Xv, Xv sec2v
I q a2E 2abF b2G
I q a2 sec2u 2ab tanu tanv b2 sec2v , a, b .
b) II Forma Fundamental:
EG F2 sec2u tan2v
EG F2 sec2u tan2v
e 1EG F2
Xu Xv, Xuusec2u
sec2u tan2v
f 1EG F2
Xu Xv, Xuv 0
g 1EG F2
Xu Xv, Xvvsec2v
sec2u tan2vII q a2e 2abf b2g
II qa2 sec2u b2 sec2v
sec2u tan2v, a, b .
c) Curvaturas:
c.1) Curvatura Gaussiana:

101
K eg f2
EG F2
K sec2u sec2vsec2u tan2v 2
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kna2 sec2u b2 sec2v
a2 sec2u 2ab tanu tanv b2 sec2v sec2u tan2v
Tomando o ponto de sela q u, v 0,0 , tem-se que:
Kna2 b2
a2 b2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1sec u sec v
sec2u tan2ve k2
sec u sec vsec2u tan2v
No ponto q u, v 0,0 , tem-se que
k1 1 e k2 1
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0
2u v 0
u v 0
As linhas de curvatura da superfície de Scherk em 3 são as curvas coordenadas -
meridianos e paralelos.
FIGURA 7.43 Linhas e curvatura da superfície de Scherk em 3.

102
e) Linhas assintóticas
e u 2 2fu v g v 2 0
sec2u u 2 sec2v v 2
Tomando o ponto q u, v 0,0 , tem-se:
sec20 u 2 sec20 v 2
u v
Para v u :
v t
Para v u :
v t
Para u v :
u t
Para u v :
u t
Retornando a X u, v u, v, log cos vcos u , temos as linhas assintóticas:
C1 t t , t , log cos tcos t
C2 t t , t , log cos tcos t
onde , , e .
FIGURA 7.44 Linha assintótica da superfície de Scherk em 3.
7.4.2 Superfície de Scherk de primeiro tipo em L3
A superfície de Scherk de primeiro tipo em L3 é uma superfície de translação dada,

103
segundo Walrave (1995, p.46)[22] por:
X u, v u, v, log coshvcoshu , u, v 2, tanh2u tanh2v 1.
FIGURA 7.45 Superfície de Scherk de primeiro tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 1 tanh2u 0
F Xu, Xv 1 tanhv tanhu
G Xv, Xv 1 1 tanh2v 0
I q a2E 2abF b2G
I q a2 1 tanh2u 2ab tanhv tanhu b2 1 tanh2v , a, b .
b) II Forma Fundamental:
EG F2 1 tanh2u tanh2v 0 nas condições impostas acima.
e 1EG F2
Xu Xv, Xuu 1tanh2u 1
1 tanh2u tanh2v
f 1EG F2
Xu Xv, Xuv 1 0
g 1EG F2
Xu Xv, Xvv 1tanh2v 1
1 tanh2u tanh2vII q a2e 2abf b2g
II qa2 tanh2u 1 b2 1 tanh2v
1 tanh2u tanh2v, a, b .
c) Curvaturas:

104
c.1) Curvatura Gaussiana:
K eg f2
EG F2
K sech 2u sech 2vtanh2u tanh2v 1 2
No ponto q u, v 0,0 , tem-se que K 1.
c.2) Curvatura Média:
H 12
eG 2fF EgEG F2
H 0
c.3) Curvatura Normal:
KnII q
I q
Kna2 tanh2u 1 b2 1 tanh2v
a2 1 tanh2u 2ab tanhv tanhu b2 1 tanh2v 1 tanh2u tanh2v
No ponto q u, v 0,0 , tem-se que:
Kna2 b2
a2 b2 , a, b .
c.4) Curvaturas Principais:
k2 2Hk K 0
k1 k2sechu sechv
tanhu tanhv 1
d) Linhas de Curvatura:
fE eF u 2 gE eG u v gF fG v 2 0tanh2v 1 tanhv tanhu
1 tanh2u tanh2vv 2 0
Em q u, v 0,0 , tem-se: 2u v 0
u 0 e v 0
As linhas de curvatura da superfície de Scherk de primeiro tipo são as curvas
coordenadas - meridianos e paralelos.

105
FIGURA 7.46 Linhas de curvatura da superfície de Scherk de primeiro tipo em L3.
e) Linhas Assintóticas
e u 2 2fu v g v 2 0tanh2u 1
tanh2u tanh2v 1u 2 tanh2v 1
1 tanh2u tanh2vv 2 0
Tomando-se q u, v 0,0
u 2 v 2 0
v u
Para v u :
v t
Para v u :
v t
Para u v :
u t
Para u v :
u t
Retornando a X u, v u, v, log coshvcoshu , temos as linhas assintóticas:
C1 t t , t , log cosh tcosh t
C2 t t , t , log cosh tcosh t
onde , , e .

106
FIGURA 7.47 Linha assintótica do catenóide de primeiro tipo em L3.
7.4.3 Superfície de Scherk de segundo tipo em L3
A superfície de Scherk de segundo tipo em L3 é uma superfície de translação dada
por:
X u, v u, v, log coshvsinhu , u, v 2, u 0.
FIGURA 7.48 Superfície de Scherk de segundo tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 1 coth2u 0
F Xu, Xv 1 tanhvcothu
G Xv, Xv 1 1 tanh2v 0
EG F2 1 coth2u tanh2v 0
O valor assumido por EG F2 0 indica que a superfície de Scherk de segundo tipo
não é uma superfície tipo espaço.

107
7.4.4 Superfície de Scherk de terceiro tipo em L3
A superfície de Scherk de terceiro tipo em L3 é uma superfície de translação dada
por:
X u, v u, v, log sinhvsinhu , u, v 2, u, v 0.
FIGURA 7.49 Superfície de Scherk de terceiro tipo em L3.
a) I Forma Fundamental:
E Xu, Xu 1 1 coth2u
F Xu, Xv 1 cothvcothu
G Xv, Xv 1 1 coth2v
Iq a2E 2abF b2G
Iq a2 1 coth2u 2ab cothvcothu b2 1 coth2v
b) II Forma Fundamental:
EG F2 1 coth2u coth2v 0
Logo, a referida superfície não é tipo espaço.
O quadro abaixo compara os valores obtidos para as superfícies de Scherk em 3 e
tipo 1 em L3.

108
Parâmetros 3 Tipo 1 em L3
E sec2u sech 2uF tanu tanv tanhu tanhvG sec2v sech 2v
e sec2usec2u tan2v
sech 2u1 tanh2u tanh2v
f 0 0
g sec2usec2u tan2v
sech 2v1 tanh2u tanh2v
K 1 1
Kna2 b2
a2 b2 , a, b a2 b2
a2 b2 , a, b
k1 1 1k2 1 1
Calculadas para o ponto q u, v 0,0QUADRO 7.4 Comparativo da família de superfícies de Scherk.

109
8 GEOMETRIA COM O SOFTWARE MATHEMATICA
Com o crescente desenvolvimento da tecnologia de computadores, os softwares
passaram a ocupar um lugar de destaque entre os pesquisadores e estudiosos de todos os ramos da
matemática. Gray (1999)[10] utiliza o software Mathematica para desenvolver rotinas de
programação para o cálculo e apresentação gráfica de curvas e superfícies em 3.
Seguindo a linha proposta pelo autor acima citado, o mesmo software foi aqui
utilizado para construir uma nova rotina de programação que permita estudar a geometria das
superfícies máximas em L3, tanto nos cálculos quanto no traçado das superfícies.
Para gerar figuras em movimento, tornou-se necessário o uso de outro aplicativo: o
JavaView, que incorporado ao Mathematica gera em uma nova janela, a superfície que pode ser
movimentada livremente com o auxílio do mouse, permitindo a observação de qualquer ângulo, o
que muito ajuda na observação da geometria da superfície. O mesmo software pode gerar também
um seqüência de imagens no formato .gif (figuras 7.15 e 7.19) que, com a auxílio do Windows
Movie Maker ou algum animador de gifs, mostra uma movimentação da superfície como em um
filme.
8.1 Geometria das superfícies no espaço tridimensional de Lorentz Minkowski - L3.
"Geometria de Superfícies no espaço tridimensional de Lorentz Minkowski - L3"
Clear[u,v,f1,f2,f3,Fu,Fv,Fuu,Fvv,Fuv,NF,NX,Xu,Xv,Xuu,Xuv,Xvv,NT,E1,F1,G1,L1,M1,N1,PFF,
SFF,Q,KG,KM,KN,KP1,KP2,LC,LA]
f1[u,v] ;
f2[u,v] ;
f3[u,v] ;
"Superfície Paramétrica X[u,v]"
X {f1[u,v],f2[u,v],f3[u,v]}
"Derivadas de ordem superior"
"Xu "
Xu {D[f1[u,v],u],D[f2[u,v],u],D[f3[u,v],u]}
"Xv "
Xv {D[f1[u,v],v],D[f2[u,v],v],D[f3[u,v],v]}
"Xuu "

110
Xuu {D[Xu[[1]],u],D[Xu[[2]],u],D[Xu[[3]],u]}
"Xuv "
Xuv {D[Xu[[1]],v],D[Xu[[2]],v],D[Xu[[3]],v]}
"Xvv "
Xvv {D[Xv[[1]],v],D[Xv[[2]],v],D[Xv[[3]],v]}
"Produto vetorial em L3 entre u {u1,u2,u3} e v {v1,v2,v3}"
Clear[CrossMinko,DotMinko,NormaMinko,vetor1,vetor2]
CrossMinko[vetor1_,vetor2_]: Simplify[{vetor1[[3]]*vetor2[[2]]-vetor1[[2]]*vetor2[[3]],
vetor1[[3]]*vetor2[[1]]-vetor1[[1]]*vetor2[[3]],vetor1[[1]]* vetor2[[2]]-vetor1[[2]]*vetor2[[1]]}]
"Produto escalar de vetor1 e vetor2 em L3"
DotMinko[vetor1_,vetor2_]: Simplify[-(vetor1[[1]]*vetor2[[1]]) vetor1[[2]]*vetor2[[2]]
vetor1[[3]]*vetor2[[3]]]
"Norma em L3"
NormaMinko[vetor1_,vetor2_]: Simplify[Sqrt[Abs[-(vetor1[[1]]*vetor2[[1]]) vetor1[[2]]*vetor2[[
vetor1[[3]]*vetor2[[3]]]]]
"Vetor normal da superfície X(u,v) no espaço L3"
"Xu "
Xu
"Xv "
Xv
" produto vetorial em L3 para Xu e Xv"
norma Simplify[CrossMinko[Xu,Xv]]
"Norma em L3"
norma Simplify[NormaMinko[norma,norma]]
"Vetor normal da Superfície X[u,v]"
"NX"
NX Simplify[CrossMinko[Xu,Xv]/norma]
"Verificação se o vetor normal é do tipo tempo"
"NT"
NT Simplify[DotMinko[NX,NX]]
"Coeficientes da primeira forma fundamental"
"Xu "
Xu
"Xv "
Xv
"E"

111
E1 DotMinko[Xu,Xu]
"F "
F1 DotMinko[Xu,Xv]
"G "
G1 DotMinko[Xv,Xv]
"Coeficientes da segunda forma fundamental"
"e "
L1 DotMinko[Xuu,NX]
"f "
M1 DotMinko[Xuv,NX]
"g "
N1 DotMinko[Xvv,NX]
"Determinação da I Forma Fundamental"
"PFF"
Simplify[PFF a^2*E1 2*a*b*F1 b^2*G1]
"Determinação da II Forma Fundamental"
"SFF"
Simplify[SFF a^2*L1 2*a*b*M1 b^2*N1]
"Verificação do sinal da forma quadrática Q EG-F^2"
"Q "
Simplify[E1*G1-F1^2]
Cálculo das curvatura "
"Curvatura Gaussiana "
"KG "
Simplify[KG (M1^2 - L1*N1)/((E1*G1 - F1^2)]
"Curvatura Média "
"KM "
Simplify[KM -1/2*((((L1*G1 - 2*M1*F1 E1*N1)/( E1*G1 - F1^2))]
"Curvatura Normal"
"KN "
Simplify[SFF/PFF]
"Curvaturas Principais"
"KP1 "
Simplify[KP1 KM Sqrt(KM^2 KG)]
"KP1 "
Simplify[KP1 KM - Sqrt(KM^2 KG)]

112
"Equação diferencial das linhas de curvatura"
"LC "
Simplify[(M1*E1-L1*F1)*(u’)^2 (N1*E1-L1*G1)*u’*v’ (N1*F1-M1*G1)*(v’)^2 0]
"Equação diferencial das linhas assintóticas"
"LA "
Simplify[-L1*(u’)^2-2*M1*u’*v’-N1*(v’)^2 0]
"Traço da superfície"
ParametricPlot3D[X,{u,-Pi,Pi},{v,-Pi,Pi},Boxed- alse,Axes- False,ViewPoint- {0.862, -6.827,
0.352},
AspectRatio- 1]
Convém ressaltar que o programa acima foi feito para ser utilizado com a
pseudo-métrica u1, u2, u3 , v1, v2, v3 u1v1 u2v2 u3v3. Para o uso de
u1, u2, u3 , v1, v2, v3 u1v1 u2v2 u3v3, como o feito em algumas superfícies aqui citadas,
torna-se necessário efetuar pequenas modificações em algumas linhas do programa.
8.2 Deformação isométrica do helicóide em catenóide em L3.
Deformação isométrica do helicóide em catenóide L3 - "heltocat"
heltocat[t_][u_,v_]: Sinh[ t]{-v,-Cosh[u]*Cos[v],-Cosh[u]*Sin[v]} Cosh[t]{u,-Sinh[ u]*Sin[v],
-Sinh[u]*Cos[v]}
ParametricPlot3D[heltocat[0][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},Boxed- False,Axes- False,
AspectRatio- 1,ViewPoint- {0.880,0.000, -2.060}]
ParametricPlot3D[heltocat[Pi/40][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},
Boxed- False,Axes- False,AspectRatio- 1,ViewPoint- {0.880, 0.000, -2.060}]
ParametricPlot3D[heltocat[Pi/20][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},
Boxed- False,Axes- False,AspectRatio- 1,
ViewPoint- {0.880, 0.000, -2.060}]
ParametricPlot3D[heltocat[Pi/10][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},
Boxed- False,Axes- False,AspectRatio- 1,
ViewPoint- {0.880, 0.000, -2.060}]
ParametricPlot3D[heltocat[Pi/5][u,
v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},Boxed- False,Axes-
False,AspectRatio- 1,ViewPoint- {0.880, 0.000, -2.060}]

113
ParametricPlot3D[heltocat[3Pi/10][
u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},
Boxed- False,Axes- False,AspectRatio- 1,ViewPoint-
{ 0.880, 0.000, -2.060}]
ParametricPlot3D[heltocat[2Pi/5][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},
Boxed- False,Axes- False,AspectRatio- 1,
ViewPoint- {0.880, 0.000, -2.060}]
ParametricPlot3D[heltocat[Pi][u,v],{u,-Pi/2,Pi/2},{v,-2Pi,2Pi},Boxed-
False,Axes- False,AspectRatio- 1,ViewPoint- {0.880,
0.000, -2.060}]
A programação acima refere-se ao catenóide e helicóide de primeiro tipo. Para os
outros tipos, torna-se necessário mudar a parametrização das superfícies.

114
CONCLUSÃO
Ao finalizar o presente trabalho, verificou-se que vários resultados foram obtidos no
estudo comparativo das superfícies mínimas em 3 e máximas tipo espaço em L3
Concluiu-se que os vários tipos de superfícies que surgem no pseudo-espaço de
Lorentz-Minkowski são decorrência das aplicações de Weierstrass durante o processo de
parametrização, sendo que nem todas as superfícies obtidas são tipo espaço. Porém, o uso da
pseudo-métrica u1, u2, u3 , v1, v2, v3 1 u1v1 u2v2 u3v3 que modifica os cálculos em
relação a u1, u2, u3 , v1, v2, v3 1 u1v1 u2v2 u3v3, não altera os resultados obtidos para
as superfícies estudadas.
Uma outra verificação importante é a manutenção da deformação isométrica entre o
catenóide e o helicóide em L3 para cada tipo de superfície destas famílias.
Durante o desenvolvimento deste estudo foram definidos vários conceitos de
geometria diferencial e demonstrados alguns teoremas importantes para a sua compreensão,
ressaltando as diferenças entre as duas métricas e concluindo que a primeira forma fundamental,
pode ser determinada da mesma forma para ambas. Posteriormente, o desenvolvimento da
aplicação normal de Gauss nos deu subsídios para se determinar a segunda forma fundamental e as
curvaturas média, Gaussiana, normal e principais. A grande diferença que se percebe é a troca de
sinal da curvatura Gaussiana, sempre negativa nas superfícies mínimas em 3 e sempre positiva
nas superfícies máximas em L3, sendo esta a razão da denominação "superfície máxima".
Com o uso do teorema de Olinde Rodrigues pôde se chegar à equação diferencial das
linhas de curvatura, que assim como as linhas assintóticas não apresentaram modificação na forma
de serem determinadas.
Comparações entre os resultados obtidos para a geometria de cada família de
superfícies foram realizadas ao final de cada estudo para facilitar a compreensão das diferenças
decorrentes da mudança na métrica.
Analisando os resultados obtidos para a geometria das diferentes superfícies de cada
família em L3 verifica-se muito mais que uma simples mudança de sinal ou funções
trigonométricas, uma mudança completa na geometria das superfícies. Dentre os resultados que
podem ser verificados nas figuras correspondentes a cada superfície destacam-se:
O catenóide em 3 não possui singularidade, ao contrário do catenóide de primeiro tipo
em L3.
O helicóide em 3 é construído em um cilindro circular reto ao redor do eixo
longitudinal do cilindro, enquanto o helicóide de primeiro tipo em L3 é construído entre
dois cilindros circulares retos de diâmetros diferentes.

115
Os helicóides de segundo e terceiro tipos em L3 possuem sombras semelhantes às
sombras dos catenóides em 3 e de primeiro tipo em L3.
Finalmente pôde-se avaliar e constatar a eficiência do software Mathematica para o
auxílio dos cálculos. O software mostrou-se também muito eficiente no traçado das superfícies,
tanto em 3 quanto em L3, apesar de alguns recursos não disponíveis que podem ser supridos com
a integração do software JavaView.
Acredita-se com isso que esta pesquisa venha a enriquecer o campo da geometria
diferencial, ao mesmo tempo que desperta o interesse pelo estudo comparativo de outros tipos de
superfícies para as duas métricas aqui trabalhadas, bem como da utilização de softwares que
auxiliem no estudo da geometria das superfícies em 3 e em L3.

116
BIBLIOGRAFIA
[1] AKUTAGAWA, K.; NISHIKAWA, S. The Gauss Map and Spacelike Surfaces with
Prescribe Mean Curvature in Minkowski 3-Space. Tôhoku Math. J., Tôhoku(Jp),
n. 42, p.67-82, 1990.
[2] ALEDO, J. A.; GÁLVEZ, J. A. A. Weierstrass Representation for Linear
Weingarten Spacelike Surfaces of Maximal Type in the Lorentz-Minkowski Space.
Journal of Mathematical Analysis and Applications, USA, v. 283, n.1, p. 25-45,
2003.
[3] BOLDRINI, J. L., et al. Álgebra Linear. 3a. edição. São Paulo: Editora Harbra,
1980. 411 p.
[4] COIMBRA, A. L. Espaços vetoriais: lições e exemplos. 1a. edição. São Paulo:
Editora Edgar Blücher, 1994. 98 p.
[5] DO CARMO, M. P. Geometria Diferencial de Curvas e Superfícies. 1a. edição.
Rio de Janeiro: Editora SBM, 2005, 610 p.
[6] DO CARMO, M. P. Superfícies Mínimas. 2a.edição. Rio de Janeiro: Impa,
2005, 122 p.
[7] ERVITI, J.; TORRANO, E. Notas sobre teoría de curvas y superficies.
Departamento de Matematica aplicada da Universidad Politécnica de Madrid.
Madrid(Es): 2006, p. 47-63. Disponível em:
http://www.dma.fi.upm.es/docencia/cursosanteriores/03-04/
segundociclo/teorcurv/apuntes/tcys.pdf . Acesso em 18 de outubro de 2006.
[8] FALEIROS, A. C. Aritmética, Álgebra e Cálculo com o Mathematica®. 1a.
Edicão. São Paulo: Editora Edgar Blücher Ltda., 1998, 278 p.
[9] FREITAS, C. Introdução ao Mathematica®. Apostila. Disponível em:
http://www.ime.unicamp.br/~calculo/ambientedeensino/maodupla/index.html .
Acesso em 16 de agosto de 2006.
[10] GRAY, A. Modern Differential Geometry of Curves and Surfaces with
Mathematica®. 2nd edition. New York(USA): CRC Press, 1999, 1053p.
[11] KOBAYASHI, O. Maximal Surfaces in the 3-Dimensional Minkowski Space L3.

117
Tokyo J. Math., Tokyo (Jp), v. 6, n. 2, p. 297-309, 1983.
[12] LOPES, C. M. C. Superfícies do tipo espaço com vetor curvatura média nulo em
L3 e L4. 2002. 98 f. Dissertação (Mestrado em Matemática) - Instituto de
Matemática e Estatística da Universidade de São Paulo, São Paulo(SP).
[13] MILANI, V.; SHOJAEIFARD, A. A new classification of surfaces of revolution in
3-dimensional Minkowski Space. Transaction of the American Mathematical
Society. 3-July 2006:1-11, 2006.
[14] NABER, G. L. Spacetime and Singularities: An Introduction. London:
Mathematical Society Student, Text 11, reprinted 1993.
[15] O’NEILL, B. Semi-Riemannian geometry with applications to relativity. New York,
London: Academic Press, 1983, 468 p.
[16] PICADO, J. Apontamentos de Geometria Diferencial. Apostila. Coimbra(Pt):
Departamento de Matemática da Universidade de Coimbra, 2003, p. 1-3.
[17] RODRIGUES, A. Geometria Diferencial de Curvas e Superfícies Tipo Espaço em
L3. 2006. 71 f. Dissertação (Mestrado em Matemática e Estatística) -
Universidade Vale do Rio Verde - Unincor, Três Corações (MG).
[18] STEINBRUCH, A.; WINTERLE, P. Geometria Analítica. 2a. Edição. São Paulo:
Editora Mc Graw-Hill, 1987, 302 p.
[19] SWOKOWSKI, E. W. Cálculo com Geometria Analítica. 2a. edição. São Paulo:
Makron Books Ltda.,1994, Volume 2, 763 p.
[20] TENENBLAT, K. Introdução à Geometria Diferencial. 1ª Reimpressão. Brasília:
Editora UnB, 1990, 278 p.
[21] VAN DE WOESTIJNE, I. Minimal surfaces of the 3-dimensional Minkowski space.
World Scientific Publishing, Singapore, 1990, p. 344-369.
[22] WALRAVE, J. Curves and Surfaces in Minkowski Space. Tese (Doutorado).
1995. 112 f. K. U. Leuven (Be), Faculteit Der Wetenschappen.
[23] YANG, S.D; KIM,Y,W. A family of maximal surfaces in Lorentz-Minkowski three
space. American Mathematical Society, v. 134, n. 11, p. 3379-3390, november
2006.