Embed Size (px)
Citation preview

Geometria Epipolar
Correspondência a partir da calibração das câmerasou
Forma a partir de correspondências

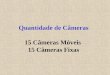
Um caso simples (cameras paralelas)
http://www.44bx.com/vic3d/Cameras/Rig1b_med.jpg

Guido Gerig
Disparidade: deslocamento relativo de um ponto
disparidade

Profundidade versus disparidade
zl
xlol xr
or
zr
p
cl cr
xl xr
t
z = z l =
z r
f = fl = fr
l r

Geometria Epipolar: notação
l
ol
p
r
or
pl
qlxcl
ycl
zcl
xcr
ycr
zcr
qr
pr
el er
linhaepipolar
linhaepipolar
epipolo epipolo

Example: motion parallel with image plane

Example: converging cameras

Example: forward motion
e
e’

Geometria Epipolar: relações básicas
l
p
r
xcl
ycl
zcl
xcr
ycr
zcr
rlr tpp
ol ortr
rllrr tpRp

Produto misto (revistado)
u
v
w
wv
h
wvbasedaárea
wv
wvu
altura
wvu alturabaseV

Matriz Essencial0)( lrrl pttp
rrlrl pRtp
llr pSpt
00
0
rxry
rxrz
ryrz
tttt
ttS
0llrr pSRp
0lr pEp
Matriz Essencial
l
eye l
P
r
eye r
pl
xcl
ycl
zcl
xcr
ycr
zcr
pr
el errt
0 lrrl pttp
lrrrl Rptp
SRE lr

Rotação de a para b (left to right)
lrlrlr
lrlrlr
lrlrlrlr
kkjkikkjjjijkijiii
R
Twl
wr
lw
wr
lr RRRRR
lwlwlw
lwlwlw
lwlwlw
wrwrwr
wrwrwr
wrwrwrlr
kkjkikkjjjijkijiii
kkjkikkjjjijkijiii
R
rwrwrw
rwrwrw
rwrwrw
wlwlwl
wlwlwl
wlwlwlrl
kkjkikkjjjijkijiii
kkjkikkjjjijkijiii
R

Vetor do eye de b em a lr
wlr eyeeyeRt
xw
eye lxcl
ycl
zcl rt
xcr
ycr
zcr
eye r
yw
zw

Matriz essencial (código C)Matrix epiEssencialMatrix( Matrix Ra, Vector eye_a, Matrix Rb, Vector eye_b) { Matrix Rba = algMult(Rb,algTransp(Ra)); Vector eye = algMult(Ra,algSub(eye_b,eye_a); Matrix S = algVectorProductMatrix(eye); Matrix E = algMult(Rba,S);
return E;}
SRE lr

Linha epipolar
tr
l
Ol
p
r
Or
pl
ql
xcl
ycl
zcl
xcr
ycr
zcr
qr
pr
el er
0lT
r Epp
r
r
fyx
p

Geometria Epipolar: Matriz Fundamental
lllimlw pKp
0lT
r pEp
01 lliml
Tr
Trimr ww pKEKp
1 lT
r EKKF
Matriz fundamental 0limT
rim pFp
zyx
ofof
yx
w yy
xx
im
im
1000
0
1
rrrimrw pKp
limlll w pKp 1
limlw p lK lp
rimrrr w pKp 1

Matriz fundamental 1 lT
r EMMF
100
0
0
0
0
0
100
0
0
ylyl
l
xlxl
l
x
rly
rl
x
rlz
rl
y
rlz
rl
lrlrlr
lrlrlr
lrlrlr
T
yryr
r
xrxr
r
osf
osf
osf
osf
eyeeye
eyeeye
eyeeye
kkjkikkjjjijkijiii
F
333231
232221
131211
FFFFFFFFF
F
Pode ser estimada diretamente se conhecermos pelo menos oito pares de pontos correspondentes

Transformações do OpenGL
xe
ye
zecenter
eye
zo
yo
xo
up
xn
yn
zn
wzyx
c
c
c
110
0
0
zyx
zyx
viewe
e
e
M
1e
e
e
c
c
c
zyx
wzyx
P
wzyx
wzyx
c
c
c
n
n
n 1
xe
ye
zexn
yn
zn
wzyx
c
c
c
1e
e
e
c
c
c
zyx
wzyx
P
wzyx
wzyx
c
c
c
n
n
n 1

Transformação para o viewport
xn
yn
zn
111
-1-1-1
void glViewport(int x0, int y0, int w, int h );
zw[0.. zmax], zmax = 2n-1 geralmente 65535
2
10
nw
xwxx
2
10
nw
yhyy
2
1max
nw
zzz
xw
yw
w
h
0
y0
x0

Revendo as transformações
1000100010001
1000000
0100
2)(00
020
002
100022
002
02
02
002
maxmaxz
y
x
exexex
eyeyex
ezeyex
eyeeyeeye
zzzyyyxxx
nffn
nfnf
btbt
btn
lrlr
lrn
zz
hh
ww
cK tpRptRp wwcwc
100
0
0
yy
xx
osf
osf
1w
w
w
z
y
x
cwcwcw
cwcwcw
cwcwcw
ZYX
ttt
kkkjkijkjjjiikijii

Transformação de K em P
0100
200
02
12
0
02122
pp
pp
pp
pp
yy
xx
nfnf
nfnf
hu
hf
wu
wwf
P
1000 yy
xx
ufuf
K
0100
200
000
'
pp
ppmp
pp
m
yy
xx
nfnfz
fnf
zufuf
K

Transformação de K em P
0100
200
02
12
0
02122
pp
pp
pp
pp
yy
xx
nfnf
nfnf
hu
hf
wu
wwf
P
1000 yy
xx
ufuf
K
0100
200
000
'
pp
ppmp
pp
m
yy
xx
nfnfz
fnf
zufuf
K

Revendo as transformações
0100
2)(00
02
0
02
0
0100
2)(00
02
0
02
0
0100
2)(00
0020
0002
100022
002
02
02
002
maxmax
nffn
nfnf
hsf
wsf
nffn
nfnf
hsn
wsn
nffn
nfnf
hsn
wsn
zz
hh
ww
y
x
y
x
y
x
100
0 yy
xx
osf
osf

Matriz Fundamental (código C)
Matrix epiFundamentalMatrix( Matrix Ma, Matrix Ra, Vector eye_a, Matrix Mb, Matrix Rb, Vector eye_b){ Matrix E = epiEssencialMatrix(Ra,eye_a,Rb,eye_b); Matrix invMa = algInv(Ma); Matrix invMbTransp = algTransp(algInv(Mb)); Matrix tmp = algMult(invMbTransp,E); Matrix F = algMult(tmp,invMa); return F;}

Estimativa direta da Matriz Fundamental
O algoritmo de 8 pontos

Estimating Fundamental Matrix
Cada par de pontos correspondents produz uma equação linear.
01
1
333231
232221
131211
r
r
ll yx
FFFFFFFFF
yx
01
33
32
31
23
22
21
13
12
11
FFFFFFFFF
yxyyyxyxyxxx rrlrlrllrlrl
The 8-point algorithm
0limT
rim pFp

Estimating Fundamental Matrix
0
1
111
33
32
31
23
22
21
13
12
11
33
22
11111
FFFFFFFFF
xx
xxxx
xyxxx
nr
nl
rl
rl
lllrl
The 8-point algorithm
0FA }]{[
TUDVA
F é a coluna de V correspondente ao menor valor singular

Estimating Fundamental MatrixThe 8-point algorithm
333231
232221
131211
FFFFFFFFF
F deveria ter posto 2!
TUDVF Seja D' = D com o menor valor singular = 0
TVUDF ''
FF 'min0'det F

The Normalized 8-point AlgorithmRichard Hartley
0lT
r Fpp
0'' llTr
Tr pFTTp
Tpp '
lTr FTTF '
:= T
1000 0 -500
0 1000 -500
0 0 1
:= Tt
1000 0 0
0 1000 0
-500 -500 1
1250000 250000 -500
250000 1250000 -500
-500 -500 1

The Normalized 8-point AlgorithmRichard Hartley
centróide
escale para a distância média ficar em 2