-
7/24/2019 Introducao a Sistemas de Controle
1/15
UNIVERSIDADE FEDERAL DE UBERLNDIAFACULDADE DE ENGENHARIA
ELTRICA
Tel/Fax.: (034) 3239-4166 / 3239-4180
Faculdade de Engenharia Eltrica
Sistemas de Controle
DEL03
5operodo
Cap. I Introduo a Sistemas de Controle
Prof. Darizon Alves de Andade
-
7/24/2019 Introducao a Sistemas de Controle
2/15
Introduo
Sistemas de controle so parte integral da sociedade moderna.
Inmeras aplicaesesto presentes no nosso dia a dia: controle de
temperatura, controle de nveis deiluminao, controle de nveis de
lquidos, controle de velocidades, controle de fluxo
de fluidos nas mais diversas aplicaes, controle de posio de
satlites,direcionamento de navios e aeronaves, direcionamento
automtico de msseis esistemas de rastreamento de alvos, controle de
processos na indstria qumica,siderrgica, eletrnica, famaceutica,
etc.. A prpria natureza nos mostra muitasformas de controle
natural, como por exemplo, o equilbrio da vida em ecosistemas.Os
animais, incluindo o homem executam diversas funes de controle como
porexemplo atuar para manter a temperatura do corpo constante,
reagir em situaes quecolocam o corpo sob risco, etc.Sistemas de
controle no se caracterizam somente para sistemas fsicos.
possvelestabelecer modelos para o controle automtico dos mais
variados aspectos docomportamento humano, como por exemplo
desempenho de estudantes, onde avarivel de entrada representada
pelo tempo disponvel para dedicar aos estudos e avarivel de sada,
ou varivel controlada so as notas obtidas. O modelo pode serusado
para prever o tempo necessrio de estudo para se alcanar
determinadamelhoria nas notas, se um determinado aumento no tempo
de estudo for possvel.Usando o modelo, pode-se determinar se vale a
pena ou no o esforo de aumentar otempo de estudo na ltima semana do
semestre para se alcanar determinado nvel dedesempenho.
Definio do sistema de controle
Um sistema de controle consiste de subsistemas e processos (ou
plantas) reunidoscom o propsito de controlar as sadas dos
processos. Por exemplo, um forno produzcalor como resultado do
fluxo de combustvel. Neste processo, subsistemaschamados de vlvulas
de combustveis e atuadores de vlvulas de combustveis sousados para
regular a temperatuda de um ambiente, controlando a produo de
calordo forno. Outros subsistemas tais como termostatos, que agem
como sensores,medem a temperatura do ambiente. Na sua forma mais
simples, o sistema decontrole leva a uma sada ou reposta para um
dado estmulo ou entrada. Isto pode seresquematizado na Fig. 1
Sistemade controle
Entrada;
Referncia
Estmulo;Resposta desejada
Sada;Resposta
Fig. 1 Descrio simplificada de um sistema de controle
-
7/24/2019 Introducao a Sistemas de Controle
3/15
Vantagens dos Sistemas de Controle.
Com sistemas de controle podemos movimentar e posicionar
equipamentos de grandeporte com nveis de preciso, que de outra
forma seria impossvel. Podemos
posicionar com preciso enormes antenas de forma a captar sinais
de rdio das maisremotas distncias do universo, pode-se controlar o
comportamento de uma naveespacial no tripulada desde o lanamento at
o seu destino final, como oacoplamento outro sistema no espao.
Pode-se controlar a aterrisagem de um aviode passageiros noite e
com condies climticas desfavorveis. Graas aos sistemasde controle,
elevadores nos transportam rpida e confortavelmente,
parandoautomaticamente no andar escolhido. Sem os mesmos, no
poderamos fornecer a
potncia requerida para transportar o peso velocidade desejada ou
requerida;motores fornecem a potncia e os sistemas de controle
regulam a posio e avelocidade.
So quatro as razes bsicas para se construir sistemas de
controle:1. Amplificao de potncia;2. Controle remoto;3. Convenincia
na forma do sinal de entrada ou referncia;4. Compensao de
distrbios.
Por exemplo, uma antena de radar, posicionada pela rotao de um
knob de baixapotncia, a entrada ou referncia, requer elevada
potncia para executar o movimentode rotao. O sistema de controle
pode produzir a amplificao de potnciarequerida, ou seja, oganhode
potncia.Robs projetados com os princpios de sistemas de controle
podem compensarinabilidades humanas. Sistemas de controle so tambm
bastante convenientes emlocais remotos ou perigosos. Por exemplo,
um brao de rob com controle remoto
pode ser usado para pegar e movimentar material em um ambiente
radioativo.
Sistemas de controle tambm podem ser usados para a convenincia
de mudar aforma da referncia. Por exemplo, em um sistema de
controle de temperatura, aentrada a posio em um termostato. A sada
o calor. Portanto, uma entrada naforma de posio, que conveniente,
leva a uma sada desejada, na forma trmica.
Vamos agora olhar para outra vantagem de um sistema de controle,
a habilidade de
compensar distrbios. Tipicamente, controlamos variveis tais como
temperatura emsistemas trmicos, posio e velocidade em sistemas
mecnicos, e tenses e correnteseltricas em sistemas eltricos. O
sistema deve ser capaz de fornecer uma sadacorreta, mesmo com a
presena de distrbios. Por exemplo, considere um sistema deantena
que aponta para uma posio comandada. Se o vento fora a antena de
sua
posio de referncia, ou se rudo se faz presente internamente, o
sistema deve sercapaz de detectar o distrbio e corrigir a posio da
antena. Obviamente, a refernciado sistema no vai mudar para se
fazer a correo. Consequentemente, o sistema porsi mesmo deve (1)
medir a intensidade com que o distrbio reposicionou a antena e(2)
retornar a antena para a posio comandada originalmente pela
referncia.
-
7/24/2019 Introducao a Sistemas de Controle
4/15
Histria dos Sistemas de Controle.
Controle de nvel de lquidos
Os gregos inciaram os sistemas de engenharia de realimentao em
torno de 300 anos
antes de Cristo. O relgio de gua, inventado por Ktesibios tinha
como princpio deoperao o enchimento de um container com vazo
constante. Para que a gua tenhavazo constante, o nvel de gua do
tanque de suprimento deve ser mantido constante.Para atingir este
objetivo uma vlvula flutuante semelhante aos controles de nvel
degua em sistemas de descarga atuais era utilizada.
Logo em seguida ao relgio de gua de Ktesibios, a idia de
controle de nvel delquidos foi aplicada a uma lmpada de leo por
Philon de Byzantium. A lmpadaconsistia de dois containers de leo
posicionados verticalmente. O container inferiorera aberto no topo
e servia de suprimento de combustvel para a chama. O
containersuperior, fechado, era o reservatrio de combustvel para o
container inferior. Oscontainers eram interconectados por dois
tubos capilares e um outro tubo, chamado deelevador vertical, que
era mergulhado no leo do container inferior, com a
pontaligeiramente abaixo da superfcie do leo. A medida que o leo
queimava, a ponta doelevador vertical ficava exposta ao ar, que
forava o leo do reservatrio superior afluir para o inferior atravs
dos tubos capilares. A transferncia do leo doreservatrio superior
para o inferior cessava quando o nvel de leo atingia o
nvelanterior, portanto bloqueando a entrada de ar no elevador
vertical. Portanto, osistema mantinha constante o nvel do lquido no
reservatrio inferior.
Outro nome histrico o de Heron de Alexandria, que viveu no
primeiro sculo
depois de Cristo. le publicou um livro com ttulo Pneumtica, que
delineoudiversos mechanismos de controle n[ivel de lquidos
utilizando reguladores flutuantes.
Controle de presso de vapor e de temperatura.
Controle de presso de vapor iniciou-se em torno de 1681 com a
inveno da vlvulade segurana por Denis Papin. O conceito foi
elaborado pela utilizao de vlvulascom peso instaladas na parte
superior da cpsula de vapor. Se a presso da cpsulaexcedesse o peso
da vlvula, vapor era liberado com a consequente reduo da
presso interna. Enquanto a presso interna no atingisse valor
suficiente paralevantar o peso a vlvula permaneceria fechada e a
presso da cpsula (caldeira)
aumentaria. Dessa forma o peso da vlvula determinava a presso
interna. Este oprincpio de operao das panelas de presso ainda
utilizadas em cozinhas domsticas.Tambm no sculo dezessete, Cornelis
Drebbel na Holanda inventou um sistema decontrole de temperatura
puramente mecnico para chocadeira de ovos. O dispositivotinha um
vial de alcool e mercrio com um flutuador. O flutuador era
conectadoem um damper que controlava a chama. Uma poro do vial era
inserida noincubador e atuava como sensor do calor gerado pela
chama. A medida que o caloraumentava, o lcool e o mercrio se
expandiam, elevando o flutuador, fechando odamper, e reduzindo a
chama. Temperatura mais baixa causava o abaixamento doflutuador,
portanto abrindo o damper e aumentando a chama.
-
7/24/2019 Introducao a Sistemas de Controle
5/15
Controle de velocidade
O primeiro controlador com sistema de realimentao utilizado em
processosindustriais normalmente atribudo a James Watt, que
utilizou o sistema de esferasgirantes (flyball governor) para
controlar a velocidade de uma mquina a vapor. No
dispositivo, completamente mecnico, duas esferas giram
proporcionalmente velocidade do eixo. Na medida em que a velocidade
aumenta, o raio de girao dasesferas aumenta de forma que a sua
altura proporcional velocidade do eixo. Ummecanismo acoplado s
esferas controla uma vlvula de fluxo de vapor, de forma quese a
velocidade aumenta a vlvula comea a se fechar reduzindo o fluxo de
vapor. Sea velocidade diminui o mecanismo abre a vlvula permitindo
que o fluxo de vaporaumente, controlando desta forma a velocidade
do eixo.
Estabilidade, estabilizao e controle de direo.
A teoria de sistemas de controle conhecida atualmente comeou a
cristalizar-se na
ltima metade do sculo dezenove. Em 1868 James Clerk Maxwell
publicou oscritrios de estabilidade para o sistema de terceira
ordem baseado nos coeficientes daequao diferencial. Em 1874 Edward
John Routh, por sugesto de William KingdonClifford, que foi
ignorado por Maxwell, foi capaz de extender o critrio
deestabilidade para sistemas de quinta ordem. Em 1877 o tpico para
o prmio Adamsfoi The Criterion of Dynamical Stability. Em resposta,
Routh submeteu o artigo ATreatise on the Stability of a Given State
of Motion, e ganhou o prmio. Este artigocontm o que hoje conhecido
como critrio de estabilidade de Routh-Hurwitz.Alexandr Michailovich
Lyapunov tambm contribuiu para o desenvolvimento eformulao da
teoria e prtica de estabilidade de sistemas de controle
conformeconhecemos atualmente. Estudante sob orientao de P.L.
Chebyshev naUniversidade de So Petersburgo na Rssia, Lyapunov
extendeu o trabalho de Routh
para sistemas no lineares na sua tese de doutorado cujo ttulo
The GeneralProblem of Stability of Motion.Durante a segunda metade
do sculo dezenove o desenvolvimento de sistemas decontrole deu-se
em aplicaes de controle de direo e estabilizao de navios.Outros
esforos foram direcionados estabilizao de plataformas de canhes,
bemcomo estabilizao de navios como um todo, utilizando pndulos como
sensores demovimento.
Desenvolvimentos no Sculo XX
At 1922 direcionamento automtico de navios utilizando esquemas
decompensao e tcnicas de controle adaptativo para melhorar
desempenho;1920-1930 H.W. Bode e H. Nyquist da Bell Telephone
Laboratories desenvolverama anlise de amplificadores com
realimentao, utilizados para propiciar conexes emcascata e permitir
conversaes a distancias de milhares de quilmetros;1948 Walter R.
Evnas, trabalhando na indstria aeronautica, desenvolveu umatcnica
grfica de determinar as razes da equao caracterstica do sistema
derealimentao, que possui parmetros variveis. Esta tcnica conhecida
como lugardas razes, juntamente com o trabalho de Bode e Nyquist
formam a base da teoria deanlise e projeto de sistemas de controle
lineares.
-
7/24/2019 Introducao a Sistemas de Controle
6/15
Aplicaes contemporneas
Atualmente, sistemas de controle so largamente utilizados em
aplicaes dedirecionamento, navegao e controle de msseis, veculos
espaciais, avies e navios,
envolvendo sistemas hidrulicos, mecnicos e eltricos.Sistemas de
controle encontram tambm aplicaes diversas em processos
industriais,regulando nveis de lquidos em tanques, concentraes
qumicas, temperatura,
presso, umidade, bem como controle de espessura de materiais,
como por exemplo,controle de espessura de material laminado em
indstrias siderrgicas.Computadores digitais so hoje parte
integrante de sistemas de controle. Porexemplo, em robs
industriais, veculos espaciais e controle de processos industriais.
difcil visualizar uma aplicao moderna de controle onde um
computador digitalno esteja presente.Sistemas de controle no so
limitados a aplicaes da indstria e da cincia. Porexemplo, em um
sistema domstico de aquecimento um sistema de controle simples
consistindo de uma lmina bimetlica empregado. A lmina se expande
ou contraicom variaes de temperatura, e estes efeitos so utilizados
para ligar ou desligar osistema, mantendo a temperatura em nveis
desejados.
O engenheiro de sistemas de controle.
Engenharia de sistemas de controle um campo excitante onde o
engenheiro sedefronta com questes interdisciplinares e pode
exercitar os seus talentos. Oengenheiro de controle vai estar no
topo de grandes projetos, engajado na faseconceitual de determinao
ou implementao do desempenho total do sistema,funes de subsistemas,
e a interconexo dessas funes, incluindo interfaceamentos,
projetos de hardware e de software bem como testes das plantas e
procedimentos.Muitos engenheiros esto engajados em uma rea
especfica, como por exemplo
projeto de circuitos ou desenvolvimento de software. Entretanto,
o engenheiro desistemas de controle vai se estar interagindo com
pessoas de inmeras especialidadesde engenharia e cincias. Por
exemplo, em uma empresa que trabalha no ramo de
biologia, profissionais de cincias biolgicas, engenharia
mecnica, engenhariaeltrica e de computao, matemticos e fsicos vo
provavelmente estar presentes.O engenheiro de controle vai estar se
relacionando com todas estas especialidades emtodos os nveis, desde
a concepo do projeto at a instalao, testes e operao. Oengenheiro de
controle pode estar trabalhando com sensores e motores, mas
tambm
com sistemas eletrnicos, pneumticos e hidrulicos.O veculo
espacial outro exemplo da diversidade requerida do engenheiro
desistemas. Os conceitos de mecnica orbital, propulso, aerodinmica,
engenhariaeltrica e engenharia mecncia esto todos envolvidos e
entreleados. De forma queo engenheiro atuando na rea de sistemas de
controle vai ter a oportunidade deexpandir o seu horizonte de
conhecimentos e experincias bem alm do currculouniversitrio.
-
7/24/2019 Introducao a Sistemas de Controle
7/15
Configurao de Sistema de Controle e Respostas
Caractersticas.
Entrada e Sada
A funo bsica de um sistema de controle de proporcionar uma sada
(ou resposta)
a um dado estmulo (ou entrada ou ainda referncia). A referncia
representa aresposta desejada; e a sada do sistema a resposta
propriamente dita. Por exemplo,no caso do elevador, quando algum
est no andar trreo e aperta o boto para ir at oquarto andar, o
elevador se movimenta com determinadas acelerao e velocidade,
enivela o seu piso com o do andar desejado com preciso projetada
para o conforto do
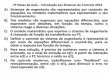
passageiro. A Fig. 2 mostra referncia e a resposta do sistema.
Observe que para ointeresse de conforto do passageiro, para no
mencionar a limitao de potnciadisponvel, no se deseja que o
elevador reproduza perfeitamente o sinal de entrada,que indica
bruscamente a mudana de nvel. O sinal de entrada representa a
sadadesejada depois que o elevador tenha parado; o elevador
propriamente dito segue odeslocamento descrito pela curva marcada
como resposta do elevador.Dois fatores tornam a resposta diferente
da referncia. Primeiro, compare a mudanainstantnea da entrada, com
a mudana gradual da sada. Grandezas fsicas no
podem mudar o seu estado (posio, velocidade,...)
instantaneamente. O estado mudaseguindo uma trajetria que
relacionada com o dispositivo e a forma pela qual omesmo adquire ou
dissipa energia. Ento, o elevador passa por mudanas gradativasa
medida que sobe do andar trreo para o quarto andar. Essa parte da
resposta conhecida como resposta transitria.
rro de regimepermanente
comando de referncia
respostatransitria
resposta de regimepermanente
resposta do elevador
4
tempo (s)
and
ar
Fig. 2 Resposta tpica de um elevador a um comando de mudana de
posio.
-
7/24/2019 Introducao a Sistemas de Controle
8/15
Aps a resposta transitria, o sistema fsico atinge a sua resposta
de regimepermanente, que a sua aproximao referncia ou resposta
desejada. Para o casodo elevador, esta resposta ocorre quando o
elevador alcana o quarto andar. A
preciso de nivelamento do piso do elevador com o do andar o
segundo fator quepoderia fazer a resposta ser diferente da
referncia. Essa diferena, mostrada na Fig.
2, chamada de erro de regime permanente. O erro de regime
permanente noprecisa existir somente em um sistema defeituoso.
Frequentemente, o erro de regimepermanente inerente ao sistema
projetado, e o engenheiro de controle determina oquanto este erro
leva a uma degradao significante das funes do sistema. Porexemplo,
em um sistema de rastreamento de satlite, um pequeno erro de
regime
permanente pode ser tolerado, desde que seja pequeno o
suficiente para manter osatlite prximo da regio central do feixe de
rastreamento do radar. Entretanto, paraum rob inserindo chips de
memria nos soquetes de uma placa de circuito impresso,o erro de
regime permanente deve ser zero.
Sistemas em malha aberta.
O diagrama genrico de um sistema em malha aberta mostrado na
Fig. 3. leconsiste de um subsistema chamado de transdutor de
entrada que converte a forma daentrada para aquela usada pelo
controlador. O controlador aciona o processo ou
planta. A entrada tambm chamada de referncia enquanto a sada
pode serchamada de varivel controlada. Outros sinais, tais como
distrbios, inseridos nosistema via somadores so tambm mostrados.
Por exemplo, a planta pode ser umforno ou sistema de ar
condicionado, onde a varivel de sada a temperatura. Ocontrolador em
um sistema de aquecimento consiste de vlvulas de combustvel e
osistema eltrico que oepra estas vlvulas.
A caracterstica que distingue os sistemas de malha aberta a sua
inabilidade decompensar qualquer distrbio que eventualmente se some
ao sinal de acionamento docontrolador (distrbio 1 na Fig. 3). Por
exemplo, se o controlador um amplificadoreletrnico e o distrbio 1
um rudo, ento qualquer rudo que aparea antes doamplificador e se
some ao sinal de comando tambm vai acionar o processo,corrompendo o
sinal de sada. A sada de um sistema de malha aberta corrompidano
somente por sinais que deturpam o sinal de comando do controlador,
mas tambm
por distrbios na sada (distrbio 2 na figura). O sistema em malha
aberta da mesmaforma no capaz de compensar estes distrbios.
++Processo
ouplanta
Sada ouvarivel
controlada
++
Entradaou
Referncia
Transdutorde entrada
Controlador
Distrbio 1 Distrbio 2
somador somador
Fig. 3- Esquema de um sistema de controle em malha aberta.
-
7/24/2019 Introducao a Sistemas de Controle
9/15
Sistemas em malha aberta so portanto simples, incapazes de
promover compensao,e so acionados somente pelo sinal de referncia.
Uma torradeira um exemplo desistema de controle em malha aberta,
onde a varivel de sada a cor da torrada. Odispositivo projetado
pressupondo que a torrada ser to mais escura quanto maistempo
permanea sob ao do calor. Mas a torradeira no mede a cor da
torrada, e
nem considera a espessura da fatia de po. Outros exemplos de
sistemas em malhaaberta so os sistemas mecnicos consistindo de
massa, mola e amortecedor com umafora constante posicionamndo a
massa. Quanto maior a fora, maior odeslocamento. Entretanto, a
posio do sistema muda se por exemplo uma foraadicional (distrbio)
aparece no processo. Outro exemplo, suponha que um
estudantedetermine quanto tempo le precisa estudar para obter
conceito A em uma disciplina,cujo exame cobre trs captulos da
matria. Se o professor incluir um quarto captulo
distrbio e o estudante no tomar conhecimento (malha aberta) e
portanto noadicionar mais tempo de estudo (compensao) o sistema est
em malha aberta. Oresultado provvel que a resposta desejada de um
conceito A no venha a ser obtido.
Sistemas em malha fechada ( ou sistemas com realimentao)
As desvantagens do sistema em malha aberta, ou seja
sensibilidade a distrbios e ainabilidade de corrigir a sua
interferncia, pode ser eliminada com a utilizao desistemas em malha
fechada. A arquitetura genrica de um sistema em malha fechada
mostrada na Fig. 4.O transdutor de entrada converte a forma da
entrada para a forma adequada para ocontrolador. Um transdutor de
sada, ou sensor, mede a resposta de sada e tambmconverte este sinal
na forma utilizada pelo controlador. Por exemplo, se o
controladorutiliza sinais eltricos para operar vlvulas para um
sistema de controle detemperatura, a posio de entrada, e a
temperatura de sada so convertidos para sinaiseltricos. A posio de
entrada pode ser convertida para tenso eltrica por meio deum
potencimetro, que um resistor varivel, e a temperatura de sada pode
serconvertida para tenso por meio de um termistor, um dispositivo
cuja resistnciaeltrica varia com a temperatura, ou ainda um
termopar, que um dispositivo que duma tenso de sada proporcional
temperatura da juno do termopar.
somador
++
Processoouplanta
Sada ouvarivel
controlada
++Entradaou
Referncia
Transdutorde entrada
Controlador
Distrbio 1 Distrbio 2
somador somador
+
-
rro ousinal atuante
Transdutor de sadaou
sensor
Fig. 4 - Esquema de um sistema de controle em malha fechada.
-
7/24/2019 Introducao a Sistemas de Controle
10/15
O primeiro somador soma algebricamente o sinal de da referncia
com o sinalproveniente do transdutor de sada, que disponibilizado
por meio do caminho derealimentao, ou seja o caminho de retorno
entre a sada e o somador da entrada. NaFig. 4, o sinal de sada
(realimentao) subtrado do sinal de entrada, resultando nosinal que
normalmente recebe o nome de sinal atuador. Entretanto, em sistemas
onde
tanto o transdutor de entrada como de sada possuem ganhos
unitrios, isto , otransdutor amplifica a sua sada por 1, o sinal
atuante de fato a diferena entre aentrada e a sada. Neste caso o
sinal atuante normalmente conhecido por erro.
O sistema em malha fechada promove a compesao de distrbios, por
meio damedida da resposta de sada que comparada com a entrada por
meio do caminho derealimentao. Se existe qualquer diferena entre as
duas respostas, o sistema acionaa planta por meio do sinal atuante
para propiciar a correo. Se no existe diferena osistema no toma
qualquer ao, uma vez que a resposta da planta j corresponde
resposta desejada.Sistemas em malha fechada portanto possuem a
vantagem bvia de permitir uma
preciso maior que sistemas de malha aberta. les so menos
sensveis a rudos,distrbios e mudanas no ambiente. A resposta
transitria e o erro de regime
permanente podem ser controlados mais convenientemente e com
maior flexibilidadeem sistemas de malha fechada, frequentemente por
um simples ajuste de ganho(amplificao) na malha, e as vezes
reprojetando o controlador. Redesenhar o sistema chamado de
compensao e o hardware resultante de compensador. Por outro
ladosistemas em malha fechada so mais complexos e mais caros que
sistemas em malhaaberta, e o engenheiro de controle deve ser capaz
de considerar todos os aspectosenvolvidos entre a simplicidade e
baixo custo de um sistema em malha aberta com amaior preciso e
custo mais elevado do sistema em malha fechada a fim de alcanaruma
deciso tcnico-econmica.
Sistemas controlados por computadores
Na maioria dos sitemas modernos de controle, o controlador (ou
compensador) umcomputador digital. A vantagem de usar computadores
que muitas malhas podemser controladas ou compensadas pelo mesmo
computador por meio de time-sharing.Ainda, qualquer ajuste nos
parmetros do compensador podem ser efetuados pormudanas no
software, ao invs de hardware. O computador tambm realiza tarefasde
superviso, tais como agendar e priorizar aplicaes.
Objetivos de anlise e de projeto.
Sistemas de controle so dinmicos: les respondem a um estmulo de
entradapassando por uma resposta transitria at alcanar a resposta
de regime permanente,que geralmente assemelha-se a referncia. Este
sistema foi identificado no exemplode controle de posio do
elevador. Nesta sesso, os trs objetivos principais daanlise e
projeto de sistemas de controle: produzir uma resposta transitria
desejada,reduzir o erro de regime permanente e alcanar a
estabilidade do controle sodiscutidos. Outras questes inerentes ao
projeto de um sistema de controle, tais como
-
7/24/2019 Introducao a Sistemas de Controle
11/15
custo, sensibilidade de desempenho do sistema e variaes de
parmetros so tambmlevantadas.
Resposta transitria.
A resposta transitria muito importante. No caso do elevador, uma
respostatransitria muito lenta torna os passageiros impacientes,
enquanto uma resposta muitorpida desconfortvel. Se o elevador
oscila ao chegar ao piso desejado por mais deum segundo o
passageiro sente um desconforto muito grande. A resposta
transitriatambm importante por questes estruturais: Uma resposta
muito rpida podecausar danos fsicos permanentes. Ento, a resposta
transitria desejada o primeiroobjetivo a ser alcanado.
Resposta de regime permanente.
Outro objetivo da anlise e projeto est focado na reposta de
regime permanente. A
resposta do sistema deve retratar a referncia, portanto a
preciso da resposta deregime permanente uma preocupao. Um elevador
deve parar com o seu piso bemnivelado com o do andar desejado para
facilitar a sada dos passageiros. A cabea deleitura/gravao de um
disco rgido de computador deve ser posicionada corretamentesobre a
pista para que no ocorra erros de leitura ou gravao. De forma que
acapacidade de identificar quantitativamente o erro de regime
permanente, bem comode impor aes corretivas para a sua reduo so
aspectos importantes em anlise e
projeto de sistemas de controle.
Estabilidade
A discusso de resposta transitria e erro de regime permanente
incua se o sistemano tem estabilidade. De forma a explicar
estabilidade, lembramos que a respostatotal de um sistema a soma de
sua resposta natural com sua resposta forada(Soluo homognea e
particular de equaes diferenciais). A resposta naturaldescreve como
o sistema adquire ou dissipa energia. A forma ou natureza
dessaresposta depende somente dos parmetros do sistema, no da
entrada. Por outro lado,a forma ou natureza da resposta forada
dependente da entrada. Ento, para umsistema linear pode-se
escrever
Resposta total = Resposta natural + Resposta forada.
Para que um sistema de controle seja til, a resposta natural
deve (1) eventualmentecair a zero, deixando portanto somente a
resposta forada, ou (2) oscilar. Em algunscasos entretanto, a
resposta natural cresce sem limites ao invs de cair a zero
ouoscilar. Pode ocorrer que a resposta natural seja to maior que a
resposta forada quetorna incontrolvel o sistema. Essa condio,
conhecida como instabilidade, podelevar a auto destruio do
dispositivo fsico, se limitadores no fizerem parte do
projeto. Uma curva da resposta em funo do tempo de um sistema
instvel, vaimostrar uma resposta transitria que cresce sem limites
e sem qualquer evidncia deuma resposta de regime permanente.
-
7/24/2019 Introducao a Sistemas de Controle
12/15
Outras consideraes.
Seleo de hardware tais como potncia de motores para atender as
demandas dosistema de controle, bem como escolha de sensores
baseados em custo, preciso elinearidade devem ser considerados nas
fases preliminares de projeto.
O aspecto financeiro custo de componentes e de implementao do
sistema tambmdevem ser considerados na fase de projeto.
Robustez do sitema de controle Os parmetros do sistema so
consideradosconstantes durante a fase de projeto, para determinao
da resposta transitria, errosde regime permanente e estabilidade.
Variaes de parmetros tambm devem serlevadas em considerao, para que
o desempenho do sistema seja aquele desejadodurante a fase de
projeto.
O desenvolvimento do projeto de um sistema de controle
Nesta seo apresentada uma sequncia de procedimentos para o
projeto de sistemasde controle realimentados.
Os seguintes passos devem ser seguidos:
1. Obter um sistema fsico que corresponda aos requerimentos do
projeto.a. Uma descrio qualitativa das diversas funes necessrias
para que a
planta realize os requerimentos do projeto.
2. Desenhar um diagrama de blocos funcional.a. A descrio
qualitativa convertida em um diagrama de blocos que
descreve as partes componentes do sistema, explicitandoo suas
funese/ou hardware requerido para o desempenho das etapas
intermedirias.A interconexo dos blocos funcionais tambm
prevista.
3. Desenhar um esquema do sistema.a. Tendo definido os elementos
necessrios ao sistema, o prximo passo
desenhar um esquema explicitando as caractersticas fsicas de
cadacomponente e de suas interconexes
4. Desenvolver o modelo matemtico do sistema.a. Obtido pela
aplicao das leis que governam os circuitos eltricos,
dispositivos mecnicos, hidraulicos, trmicos e etc. Trs
formasdistintas de representao matemtica das funes dos
diversoselementos que compem o projeto so normalmente
utilizadas:equaes diferenciais, funes de transferncia e variveis de
estado.
5. Reduzir o diagrama de blocos.a. A descrio da planta em
diversos subsistemas normalmente leva a um
diagrama detalhado com grande nmero de blocos. O prximo
passo
-
7/24/2019 Introducao a Sistemas de Controle
13/15
ento promover a reduo do diagrama de blocos, onde o sistemacomo
um todo passa a ser representado por um nmero reduzido de
blocos.
6. Proceder a anlise e desenvolver o projeto.
a. Com o diagrama de blocos reduzido a prxima fase ento de
anlisedo projeto, onde se verifica se as especificaes e o
desempenhorequeridos no projeto esto sendo atendidos. Nesta fase
ajuste dos
parmetros do sistema so feitos, e se as especificaes no
soatendidas, ento hardware adicional deve ser incorporado ao
projeto deforma a se alcanar o desempenho desejado.
b. Sinais de teste so utilizados como referncia, tanto na
simulaomatemtica, como na fase de testes experimentais. No prtica
aescolha de sinais complicados de entrada para analisar o
desempenhodo sistema. Sinais de teste so normalmente simples tais
comoimpulso, degrau, rampa, parabola e senides como mostrado na
Tabela
1.1
Projeto Assistido por computador.
O computador desempenha uma funo muito importante no projeto de
sistemasmodernos de controle. Existem atualmente softwares
disponveis que desempenhamas mais variadas tarefas, permitindo a
anlise de desempnho, otimizao de projetocom grande facilidade.
Simulaes digitais so realizadas rapidamente, e pode-sefacilmente
introduzir no linearidades e outros efeitos, antes muito difceis
ouimpossvel de serm incorporados na fase de anlise do projeto.Um
dos softwares muito utilizados em projeto de sistemas de controle o
MATLAB,que inclui facilidades tais como o ambiente de simulao
SIMULINK, e o controltool-box, que contm um conjunto de programas
especficos para funes de controle.Durante este curso, o programa
MATLAB dever ser usado para a soluo dediversos problemas.
-
7/24/2019 Introducao a Sistemas de Controle
14/15
Tabela 1.1 Formas de onda de teste utilizadas em sistemas de
controle
Entrada Funo Descrio Curva Utilidade
Impulso (t) ( )toutroqualquer
tt
0
00
=
+
-
7/24/2019 Introducao a Sistemas de Controle
15/15
8. Enumere os trs critrios mais importantes para o projeto de
sistemas decontrole.
9. Enumere as duas componentes da resposta de um sistema.10.
Fisicamente, o que ocorre com um sistema instvel?11. Instabilidade
atribuda a qual parte da resposta total do sistema?
12. Ajustes no ganho do forward path podem causar mudanas na
respostatransitria. Verdadeiro ou falso?
13. Enumere trs mtodos para modelagem matemtica de sistemas de
controle.14. Faa uma breve descrio de suas respostas questo 13.