Embed Size (px)
Citation preview

∫ntegrada, v. V, n. II NOVEMBRO, 2018
ISSN 2359-0645
REVISTA CIENTÍFICA FACOL/ISEOL (Int. Rev. Cie. FACOL/ISEOL)
Volume V, número II, NOVEMBRO de 2018
∫ntegrada, v. V, n. II NOVEMBRO, 2018
A Revista INTEGRADA apresenta sua edição Número 2 do 5º volume,
essa publicação tem como fator novo o fato de agregar dois formatos de
publicação os artigos completos submetidos à revista e os artigos em resumo
apresentados no II Congresso Regional de Educação Física FACOL.
A integração entre as atividades acadêmicas e os cursos é sempre um
diferencial positivo da instituição de ensino FACOL / ISEOL e fica aqui
registrado mais um caso dessa tendência.
Seguimos guiados por nossos princípios éticos e morais, acreditando
em nossa política (missão, visão e valores) e com a esperança que a leitura
traga ao leitor a satisfação na busca por informação.
O Editor.
.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
Publicação conjunta de caráter educacional,
pedagógico, científico e tecnológico das
Instituições de Ensino Superior (IES)
Editor Geral
Prof. Me. Felipe Camargo de Campos Lima
Assessoria Editorial
Prof. Me. Luiz Gustavo Martineli Delgado Prof. Me. Danielle de Oliveira Cabral Faria
Prof. Esp. Luiz Eduardo Conti Prof. Me Ana Beatriz Cardoso omingues
Prof. Me. Simone Aparecida Biguetti Prof. Dr. Raphaael Guazzelli Valério
Revisão e Diagramação
Prof. Esp. Frederico Dallalana

∫ntegrada, v. V, n. II NOVEMBRO, 2018
∫ntegrada Revista Científica FACOL/ISEOL
(Int. Rev. Cie. FACOL/ISEOL)
v. V, n. II, NOVEMBRO DE 2018
Lençóis Paulista – SP ISSN 2359-0645

∫ntegrada, v. V, n. II NOVEMBRO, 2018
Sumário
CAPÍTULO I Artigos completos ..................................................................................... 1
PROGRAMA DE CONTROLE DESENVOLVIDO NO MATLAB PARA COMANDAR UM SISTEMA DE MEDIDAS ELÉTRICAS EM SEMICONDUTORES ................................. 2
EFICIÊNCIA, PRODUTIVIDADE E CUSTOS DAS TESOURAS MANUAL E SEMIMECANIZADA NA PODA DE Pinus taeda L. ..................................................... 17
EMERGÊNCIA E CRESCIMENTO INICIAL DE PROGÊNIES DE Enterolobium Schomburgkii Benth. ................................................................................................... 31
CAPÍTULO II Resumos ............................................................................................... 40
A ARTE CIRCENSE COMO LINGUAGEM LÚDICA DA CULTURA E DO MOVIMENTO NA EDUCAÇÃO INFANTIL ......................................................................................... 41
AS LUTAS E A MOTIVAÇÃO DOS ALUNOS NA EDUCAÇÃO FÍSICA ...................... 43
BRINCADEIRAS ANTIGAS: ‘’NO RITMO DA CORDA’’ .............................................. 45
COMPARAÇÃO ENTRE TREINAMENTO INTERVALADO DE ALTA INTENSIDADE E TREINAMENTO CONTINUO DE MODERADA INTENSIDADE NA CAPACIDADE FUNCIONAL E VARIÁVEIS HEMODINÁMICAS EM IDOSOS. ................................... 47
AS PERSPECTIVAS DE GRANDUANDOS(AS) SOBRE A DISCUSSÃO DAS TEMÁTICAS GÊNERO E SEXUALIDADE DURANTE A FORMAÇÃO INICIAL .......... 49
CAPÍTULO I Artigos completos

∫ntegrada, v. V, n. II NOVEMBRO, 2018
2
PROGRAMA DE CONTROLE DESENVOLVIDO NO MATLAB PARA COMANDAR UM SISTEMA DE MEDIDAS ELÉTRICAS EM
SEMICONDUTORES
João Carlos Angelico1,2
Leandro de Carvalho Dias1
1 Universidade Paulista – UNIP, Bauru – SP, Brasil – [email protected] 2 Faculdade Orígenes Lessa – FACOL, Lençóis Paulista – SP, Brasil - [email protected]
RESUMO: Neste trabalho foi desenvolvido um programa para comandar de forma remota um amplificador lock-in que é utilizado para fazer medidas da impedância em filmes semicondutores. O mesmo programa também comanda um controlador de temperatura. Os dois equipamentos, lock-in e controlador de temperatura, estão conectados via interface GPIB (General Purpose Interface Bus) a um criostato e a um computador. A escolha do software Matlab para o desenvolvimento do programa se justifica pelo grande potencial de aplicabilidade desta linguagem de programação nas áreas de Engenharia. O programa desenvolvido envia comandos para o lock-in definindo a amplitude e o intervalo de frequência do sinal que vai ser aplicado na amostra. As temperaturas iniciais e finais, assim como as taxas de aquecimento (ou resfriamento) das amostras, também são controladas pelo programa. A aquisição de dados é feita em formato ASCII, que é reconhecido por vários outros softwares, facilitando a análise das medidas. Palavras–chave: Programação de computadores; controle remoto de equipamentos.
MATLAB DEVELOPED CONTROL PROGRAM TO COMMAND A SYSTEM OF
ELECTRICAL MEASURES IN SEMICONDUCTORS
ABSTRACT: This work led to the development of a program to remotely control a lock-in amplifier used to measure impedance in semiconductor films. The same program also commands a temperature controller. The two equipment, the lock-in and the temperature controller, are connected, via GPIB (General Purpose Interface Bus) interface, to a cryostat and a computer. The selection of the MATLAB software for the program development is justified by the great applicability potential of this programming language in the Engineering areas. The developed program sends commands to the lock-in, defining the amplitude and frequency interval of the signal to be applied to the sample. The program also controls initial and final temperatures, as well as the heating (or cooling) rates of samples. The data acquisition is done in ASCII format, which is recognised by several other software, facilitating the analysis of the measures. Key words: Computer programming; remote control of equipment.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
3
1. Introdução
O Matlab tem sido amplamente aplicado na área de controle industrial nas
últimas décadas por ser um software que trabalha com análises numéricas, cálculos
de matrizes, processamento de sinais, etc, em um ambiente intuitivo. Joldes et. al
(2010) estudaram circuitos lógicos utilizando redes neurais artificiais feedforward
desenvolvidas no Matlab. As redes demostraram imunidade ao ruído e tolerância a
falhas. Com o novo método de simulação foi possível obter um número reduzido de
transistores e um designer mais simples. A modelagem de circuitos eletrônicos
também foi realizada com Redes Neurais Artificiais desenvolvidas no Matlab por
Andrejevic (2003) e Mendonça (2002).
Na área de Engenharia o Matlab rapidamente ganhou prestígio, pois os
problemas e soluções são escritos em linguagem matemática e não na linguagem
de programação tradicional, como muitos outros softwares utilizam. O Matlab é uma
linguagem de programação de alto nível, incorporando as seguintes ferramentas:
construção de gráficos e compilações de funções, manipulação de funções
específicas de cálculos e variáveis simbólicas (MATSUMOTO, 2001). O Matlab
também possui uma grande quantidade de bibliotecas auxiliares que minimizam o
tempo gasto para realizar tarefas, uma vez que, o usuário poderá utilizar muitas
funções já definidas, poupando o tempo de cria-las. Por ser um ambiente
interpretado, o tempo de processamento no Matlab é maior do que em outras
linguagens de programação (BECKER, 2010).
Nos projetos de sistemas de controle, o Matlab é também uma poderosa
ferramenta. Além de realizar cálculos longos e tediosos com muita eficiência, o
Matlab tem uma excelente interface gráfica que auxilia o Engenheiro no
desenvolvimento do projeto (BASILIO, 2004). O “Instrument Control Toolbox ™”
permite conectar o Matlab diretamente a instrumentos como osciloscópios,
geradores de funções, analisadores de sinais, fontes de alimentação e instrumentos
analíticos. A “toolbox” se conecta aos seus instrumentos através de drivers de
instrumento, como IVI e VXI plug & play, ou através de comandos SCPI baseados
em texto sobre protocolos de comunicação comumente usados como GPIB, VISA,
TCP/IP e UDP. Também é possível com o “Instrument Control Toolbox” controlar e
adquirir dados de equipamentos de teste sem escrever código. O “Instrument
∫ntegrada, v. V, n. II NOVEMBRO, 2018
4
Control Toolbox” permite gerar dados no Matlab para enviar para um instrumento, ou
ler dados no Matlab para análise e visualização. É possível automatizar testes,
verificar projetos de hardware e criar sistemas de teste baseados em padrões LXI,
PXI e AXIe. Para comunicação remota com outros computadores e dispositivos do
Matlab, a caixa de ferramentas fornece suporte integrado para protocolos de série
TCP / IP, UDP, I2C e Bluetooth® (CHAPMAN, 2011).
2. Metodologia
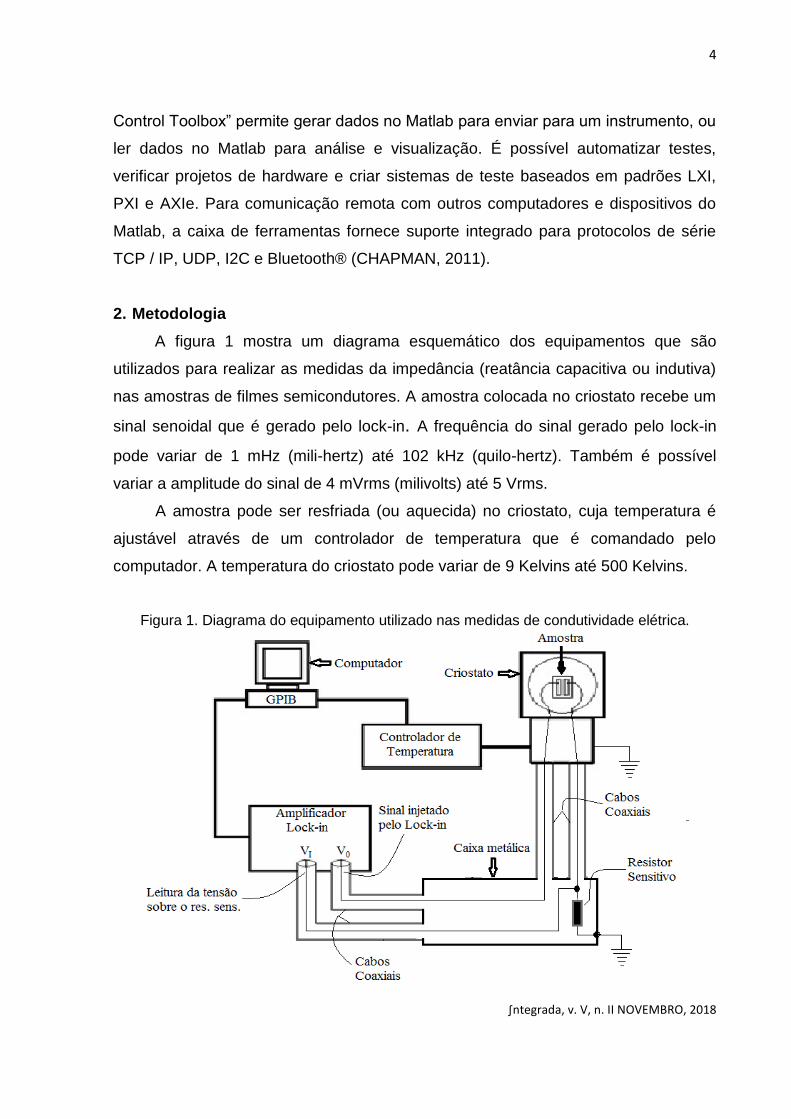
A figura 1 mostra um diagrama esquemático dos equipamentos que são
utilizados para realizar as medidas da impedância (reatância capacitiva ou indutiva)
nas amostras de filmes semicondutores. A amostra colocada no criostato recebe um
sinal senoidal que é gerado pelo lock-in. A frequência do sinal gerado pelo lock-in
pode variar de 1 mHz (mili-hertz) até 102 kHz (quilo-hertz). Também é possível
variar a amplitude do sinal de 4 mVrms (milivolts) até 5 Vrms.
A amostra pode ser resfriada (ou aquecida) no criostato, cuja temperatura é
ajustável através de um controlador de temperatura que é comandado pelo
computador. A temperatura do criostato pode variar de 9 Kelvins até 500 Kelvins.
Figura 1. Diagrama do equipamento utilizado nas medidas de condutividade elétrica.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
5
A impedância da amostra é obtida com auxílio de um resistor sensitivo,
conforme mostrado na figura 1. O sinal injetado pelo lock-in percorre a amostra e o
resistor sensitivo que ficam ligados em série. O próprio lock-in “lê” o valor da tensão
elétrica que surge sobre o resistor sensitivo. O lock-in fornece informações sobre o
módulo (parte real e imaginária) da tensão e o ângulo de defasagem, permitindo
avaliar se amostra tem comportamento capacitivo ou indutivo (BOYLESTAD, 2015;
CHARLES, 2013).
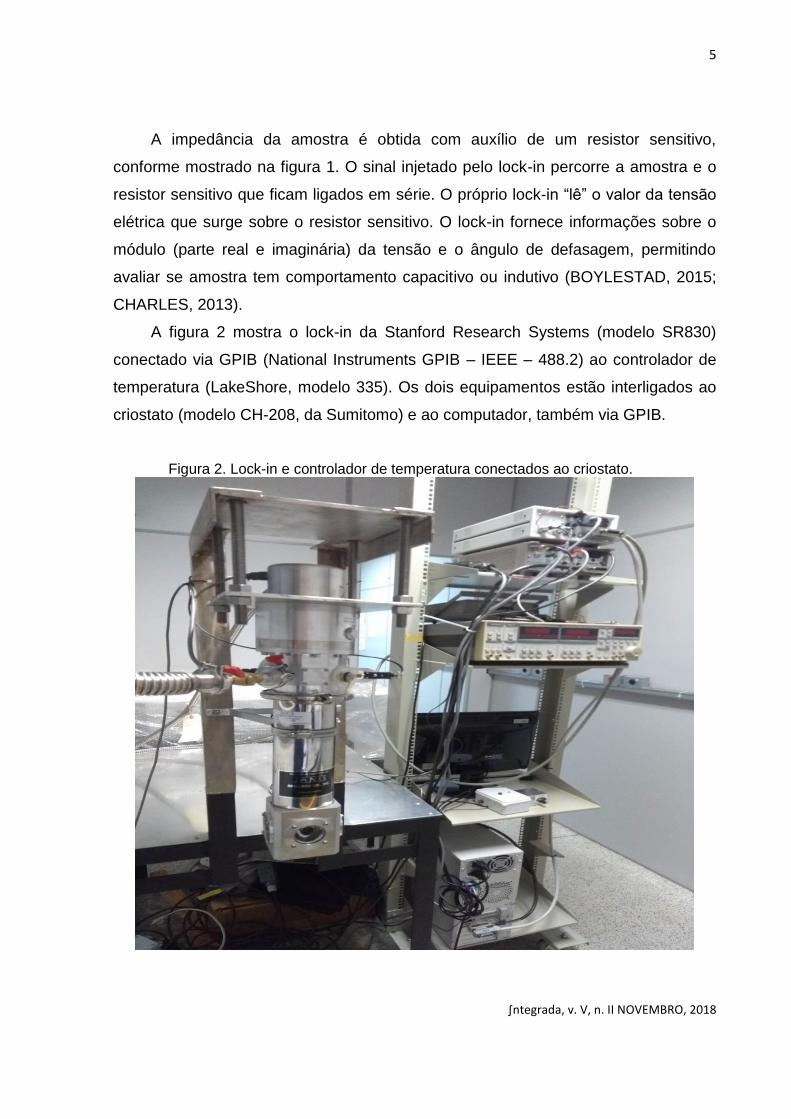
A figura 2 mostra o lock-in da Stanford Research Systems (modelo SR830)
conectado via GPIB (National Instruments GPIB – IEEE – 488.2) ao controlador de
temperatura (LakeShore, modelo 335). Os dois equipamentos estão interligados ao
criostato (modelo CH-208, da Sumitomo) e ao computador, também via GPIB.
Figura 2. Lock-in e controlador de temperatura conectados ao criostato.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
6
3. Resultados e Discussão
O programa desenvolvido no Matlab para comandar o lock-in e o controlador
de temperatura do sistema pode ser consultado no anexo deste artigo. O software
foi desenvolvido no editor de programas do Matlab, versão do estudante. A versão
do estudante tem um preço mais acessível e apresentou os recursos necessários. O
programa permitiu que os comandos necessários, para o perfeito funcionamento dos
equipamentos, pudessem ser definidos no computador e enviados via interface
GPIB para o lock-in e para o controlador de temperatura. A aquisição dos dados
“lidos” sobre o resistor sensitivo pelo lock-in e pelo controlador de temperatura
também foi obtida de forma satisfatória. O conjunto de dados com as medidas
puderam ser salvos no computador em formato ASCII (American Standard Code for
Information Interchange). O programa desenvolvido permitiu definir os seguintes
parâmetros controle:
a) Quanto as características gerais das medidas
Nome do arquivo a ser salvo no computador
Quantidades (número) de medidas que serão feitas sobre a amostra
Tempo entre a aquisição de uma leitura e a subsequente
b) Quanto ao lock-in
Tensão eficaz do sinal senoidal gerado
Frequência inicial do sinal
Incremento de frequência (frequência de passo)
Frequência final do sinal
c) Quanto ao controlador de temperatura
Set point do equipamento (temperatura a ser aplicada na amostra)
Taxa de aquecimento (ou resfriamento) da amostra
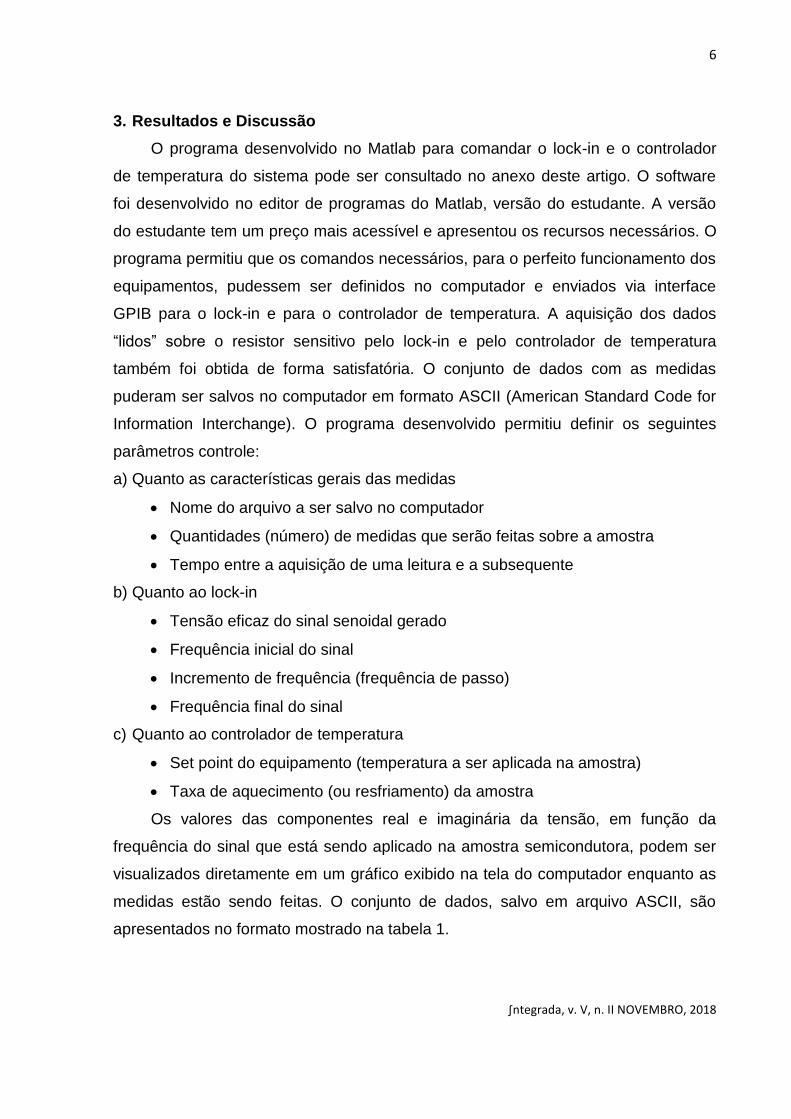
Os valores das componentes real e imaginária da tensão, em função da
frequência do sinal que está sendo aplicado na amostra semicondutora, podem ser
visualizados diretamente em um gráfico exibido na tela do computador enquanto as
medidas estão sendo feitas. O conjunto de dados, salvo em arquivo ASCII, são
apresentados no formato mostrado na tabela 1.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
7
Tabela 1. Formato do conjunto de dados
Número da medida
Frequência (Hz)
V_Real (Volts)
V_Imag (Volts)
Fasor (Volts)
Ângulo (Graus)
Temperatura (Kelvin)
1 1000 0.02985 -0.02692 0.04004 -42.198 290.56 2 1100 0.02710 -0.02686 0.03803 -44.928 290.64 3 1200 0.02460 -0.02655 0.03607 -47.400 290.72
Por possuir uma biblioteca de funções pré-definidas, a implementação do
programa no Matlab torna-se mais fácil, conforme pode ser verificado no anexo
deste artigo onde são descritas as linhas de comando.
Medidas testes realizadas para verificar a eficiência do programa, utilizando
amostras de filmes semicondutores crescidos por sputtering (ANGELICO, 2015;
SMITH, 1995), mostraram um perfeito desempenho do sistema. As componentes
real e imaginária da tensão, medidas sobre o resistor sensitivo, e a leitura da
temperatura a qual a amostra está submetida, permite calcular a impedância
complexa da amostra. Esta impedância complexa é importante para determinar os
diferentes mecanismos de transporte elétrico que ocorre no material (BIANCHI,
1999).
4. Conclusões
O programa permitiu definir e encaminhar (endereçar) do computador para o
lock-in e para o controlador de temperaturas as variáveis (tensão, frequência,
temperatura, etc) que são aplicadas na amostra durante as medidas de impedância.
A aquisição de dados também foi obtida de forma satisfatória. Os conjuntos de
dados obtidos durante as medidas são salvos no computador no formato ASCII e
podem ser trabalhados em programas conhecidos como, por exemplo, Origin, que é
frequentemente utilizado na construção de gráficos. Outros programas também
podem ser utilizados para manipular os dados, como por exemplo, o Microsoft Excel
ou o próprio Matlab.
5. Agradecimentos
Os autores agradecem pelo apoio financeiro da Vice-Reitoria de Pós-
Graduação e Pesquisa da UNIP, no PROJETO INDIVIDUAL DE PESQUISA PARA
DOCENTES, processo 7-03-1055/2017. Agradecem a Universidade Estadual
∫ntegrada, v. V, n. II NOVEMBRO, 2018
8
Paulista (UNESP), no programa de Pós-doutorado, concedido ao Prof. Dr. João
Carlos Angelico. Também agradecem o Professor Dr. José Humberto Dias da Silva
(UNESP – Bauru) por permitir o desenvolvimento deste trabalho no laboratório de
filmes semicondutores. Finalmente agradecem o financiamento FAPESP, processo
2017/18916-2.
6. Referências ANDREJEVIC, M. et. al. Journal of Automatic Control. University of Belgrade, vol. 13 (1): 31-37, 2003. ANGELICO, J. C. et. al. Journal of Alloys and Compounds. v. 630, p. 78-83, 2015. BASILIO, J. C. Laboratório de Sistemas de Controle I. Universidade Federal do Rio de Janeiro. Escola de Engenharia – Depto. De Eletrotécnica. 3ª Edição. 2004. BECKER, A. J. et. al. Noções Básicas de Programção em MATLAB. Universidade Federal de Santa Maria. 2010. BIANCHI, R. F. et al. J. Chem. Physic, v. 110, p 4602-4607, 1999. BOYLESTAD, R. Introdução À Análise de Circuitos.12ª Ed. Editora Prentice Hall, 2015. CHAPMAN, S. J. Programação em Matlab para Enngenheiros. 2° Edição. 2011. CHARLES K. A; MATTHEW N; O. SADIKU. Fundamentos de Circuitos Elétricos. 5ª Ed.Editora McGraw-Hill.2013. JOLDES, R. et. al. Combinational Logical Circuits Simulation Using Feed Forward Neural Networks. University of Alba Iulia. 2010. MATSUMOTO, E. Y. Matlab 6: Fundamentos de Programação. Editora Érica. 2001. MENDONÇA, M. et. al. Simulation of Electronic Circuits Using Neural Networks. UNOPAR. 2002. SMITH, D. L. Thin Film Deposition: Principles and Practice. Boston: McGraw Hill, Cap. 8 e 9, p. 431-488. 1995. 7. Anexo
Programa desenvolvido no Matlab para comandar o lock-in e o controlador de temperatura. %%%%%%%%%
∫ntegrada, v. V, n. II NOVEMBRO, 2018
9
% Registros % Data Programador % 20/07/2018 João Carlos Angelico %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%% Rotina do Lock-In %%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % Limpando qualquer conexão. Instrreset % A função instrreset desconecta e deleta todos os instrumentos objetos. clear all; % O objeto deletado deve ser removido do workspace. % % Criando objeto instrumento para o lock-In. % L=gpib('ni',0,8); % Cria um objeto gpib associado com a placa
GPIB da National Instruments, com índice de placa zero e um endereço de instrumento 8. % % fopen(L); % Estabelece comunicação com o lock-in. % fprintf(L,'OUTX 1'); % Define interface GPIB para o lock-in. fprintf(L,'*CLS'); % Limpa todos os eventos registrados. fprintf(L,'*RST'); % Retorna o lock-in para as condições padrão. fprintf(L,'FMOD 1'); % Habilita o oscilador interno. set(L, 'SecondaryAddress', 0); set(L, 'Timeout', 10); % % Solicitando um nome para salvar o arquivo. entrada={'Digite um nome para salvar o arquivo:'}; titulo= 'Nome do arquivo'; resposta=inputdlg(entrada, titulo); nome=(char(resposta)); % nome1=['D:\Criostato\']; nome2=num2str(nome); diretorio=[nome1 nome2]; % % Solicitando se quer ligar a função filtro "SYNC" do lock-in. Escolha a opção "1"
para ligar. Caso queira manter desligado escolha "0". aviso={'Deseja ligar a "filtragem" SYNC? (SIM => digite "1"; NÃO => digite "0".'}; resposta=inputdlg(aviso); filtro=str2num(char(resposta)); % Resposta para ligar ou não “SYNC”. filt=num2str (filtro); fil=['SYNC' blanks(1) filt]; fprintf(L,fil); %

∫ntegrada, v. V, n. II NOVEMBRO, 2018
10
%Definindo os parâmetros de entrada do sinal gerado pelo lock-in. aviso={'Entre com a amplitude do sinal de saída - em volts - (CUIDADO! -
mínimo:0,004 V, máximo:5,000 V) :', 'Entre com a frequência inicial do sinal de saída - em Hz - (CUIDADO! - mínimo:0,001 Hz) :',
'Entre com a frequência final do sinal de saída - em Hz - (CUIDADO! - máximo:102000 Hz) :',
'Entre com a frequência de passo - em Hz :', 'Entre com o tempo de passo - em segundos :'};
titulo='Parametros de entrada do lock-in'; resposta=inputdlg(aviso,titulo); tensao=str2num(char(resposta(1))); % Tensão (amplitude) do sinal. fq_i=str2num(char(resposta(2))); % Frequência inicial do sinal. fq_f=str2num(char(resposta(3))); % Frequência final do sinal. fq_p=str2num(char(resposta(4))); % Taxa de aumento da frequência. t_p=str2num(char(resposta(5))); % Tempo de passo. num1=((abs(fq_f-fq_i))/fq_p)+1; % Numero total de medidas estimado.
num=fix(num1); % Arredonda o número total de medidas. fq_ii = fq_i - fq_p; % Definindo a frequência para tabela. % % Definindo a amplitude do sinal para o lock-in. x=num2str (tensao); y=['SLVL' blanks(1) x]; fprintf(L,y); % fprintf(L,':TRACe:CLEar'); % Limpa buffer. % fprintf(L,':SYST:MACR:TRIG'); % Seleciona triggering basic. fprintf(L,':SYSTem:MACRo:TRIGger:MODE ONES'); fprintf(L,':SYSTem:MACRo:TRIGger:SOURce BUS'); % fprintf(L,':RESistance:MANual:VSOurce:OPERate ON'); fprintf(L,':SYST:ZCH OFF'); % Desliga Zero_Check fprintf(L,':SYSTem:TSTamp:REL:RESet'); % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%% Fim da rotina do lock-In %%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%% Rotina do Controlador de temperatura %%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % t=gpib('ni',0,28); % Cria um objeto gpib para controlador temperatura. % set(t, 'InputBufferSize', 50000); fopen(t); % Estabelece comunicação com o controlador de temperatura.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
11
set(t, 'SecondaryAddress', 0); set(t, 'Timeout', 10); % % Definindo os parâmetros de entrada do controlador de temperatura. As medidas podem ser feitas com o aquecedor ligado ou desligado. Para ligar o aquecedor escolha a opção "1". Caso queira manter o aquecedor
desligado escolha a opção "0". aviso={'Deseja ligar a resistência de aquecimento do criostato? (SIM => digite "1"; NÃO => digite "0".'}; % Enviando mensagem para tela. resposta=inputdlg(aviso); sim=str2num(char(resposta)); % Resposta para ligar ou não o aquecedor. if sim == 1; % % Solicitando os valores na tela aviso={'Defina o setpoint (em kelvin).',
'Defina a potência de aquecimento: Potência baixa => digite "1"; Potência media => digite "2"; Potência alta => digite "3".', 'Defina a taxa de aquecimento (em kelvin / minuto).'};
% titulo='PARÂMETROS DO CONTROLADOR DE TEMPERATURA'; % resposta=inputdlg(aviso,titulo); % set=str2num(char(resposta(1))); % Lê o valor do setpoint definido na tela. ran=str2num(char(resposta(2))); % Lê o valor da potencia definido na tela. ram=str2num(char(resposta(3))); % Lê o valor taxa definido na tela. % if set <= 0 warndlg ('A temperatura final deve ser positiva! Redefinir os parâmetros.'); % Desligando e desconectando o lock-in. fprintf(L,':RESistance:MANual:VSOurce:OPERate OFF'); fprintf(L,'*RST'); fprintf(L,'*CLS'); fprintf(L,':CALC1:STAT OFF'); fprintf(L,':SYST:ZCH ON'); % fclose(L) % Desconecta o lock-in % fprintf(t,'RANGE 1, 0'); % Desliga a potência do aquecedor. %
ram1=['RAMP 1, 0,']; % Desliga a taxa de aquecimento do aquecedor. ram2=num2str(ram); % Transforma o valor da taxa em "char array". y4=[ram1 blanks(1) ram2]; % Prepara o comando de taxa para ser enviado
para o controlador de temperatura. fprintf(t,y4); % Envia o comando para desligar taxa de aquecimento para o
aquecedor. % fprintf(t,'*RST');

∫ntegrada, v. V, n. II NOVEMBRO, 2018
12
fclose(t) % Desconecta o controlador de temperatura end % if ram < 0.1 warndlg ('A taxa deve ser definida entre 0.1 e 100! Redefinir os parâmetros.'); % Desligando e desconectando o lock-in fprintf(L,':RESistance:MANual:VSOurce:OPERate OFF'); fprintf(L,'*RST'); fprintf(L,'*CLS'); fprintf(L,':SYST:ZCH ON'); % fclose(L) % Desconecta o lock-in. % % Desligando e desconectando o controlador de aquecimento. % fprintf(t,'RANGE 1, 0'); % Desliga a potência do aquecedor. % ram1=['RAMP 1, 0,']; % Desliga a taxa de aquecimento do aquecedor. ram2=num2str(ram); % Transforma o valor da taxa em "char array". y4=[ram1 blanks(1) ram2]; % Prepara o comando de taxa para ser enviado
para o aquecedor. fprintf(t,y4); % Envia o comando para desligar taxa de aquecimento. % fprintf(t,'*RST'); % fclose(t) % Desconecta o controlador de temperatura. end % if ram > 100 warndlg ('A taxa deve ser definida entre 0.1 e 100! Redefinir os parâmetros.'); % Desligando e desconectando o lock-in. fprintf(L,':RESistance:MANual:VSOurce:OPERate OFF'); fprintf(L,'*RST'); fprintf(L,'*CLS'); fprintf(L,':SYST:ZCH ON'); % fclose(L) % Desconecta o lock-in % % Desligando e desconectando o controlador de aquecimento % fprintf(t,'RANGE 1, 0'); % Desliga a potência do aquecedor %%% ram1=['RAMP 1, 0,']; % Desliga a taxa de aquecimento do aquecedor. ram2=num2str(ram); % Transforma o valor da taxa em "char array". y4=[ram1 blanks(1) ram2]; % Prepara o comando de taxa para ser enviado
para o aquecedor. fprintf(t,y4); % Envia o comando para desligar taxa de aquecimento para o
aquecedor.

∫ntegrada, v. V, n. II NOVEMBRO, 2018
13
% fprintf(t,'*RST'); % fclose(t) % Desconecta o controlador de temperatura. end % switch ran % case 1 % set1=['SETP 1,']; % Define o comando "char array" do setpoint. set2=num2str(set); % Transforma o valor do setpoint em "char array". y2=[set1 blanks(1) set2]; % Prepara o comando setpoint para ser enviado
para o aquecedor. fprintf(t,y2); % Envia o comando para o aquecedor. % ran1=['RANGE 1,']; % Define o comando "char array" da potência. ran2=num2str(ran); % Transforma o valor da potência em "char array". y3=[ran1 blanks(1) ran2]; % Prepara o comando de potência para ser enviado
para o aquecedor. fprintf(t,y3); % Envia o comando para o aquecedor % ram1=['RAMP 1, 1,']; % Define o comando "char array" da taxa de
aquecimento para o aquecedor. ram2=num2str(ram); % Transforma o valor da taxa em "char array”. y4=[ram1 blanks(1) ram2]; % Prepara o comando de taxa para ser enviado
para o aquecedor. fprintf(t,y4); % Envia o comando da taxa de aquecimento para o aquecedor. % case 2 % set1=['SETP 1,']; set2=num2str(set); y2=[set1 blanks(1) set2]; fprintf(t,y2); % ran1=['RANGE 1,']; ran2=num2str(ran); y3=[ran1 blanks(1) ran2]; fprintf(t,y3); % ram1=['RAMP 1, 1,']; ram2=num2str(ram); y4=[ram1 blanks(1) ram2]; fprintf(t,y4); % case 3 %
∫ntegrada, v. V, n. II NOVEMBRO, 2018
14
set1=['SETP 1,']; set2=num2str(set); y2=[set1 blanks(1) set2]; fprintf(t,y2); % ran1=['RANGE 1,']; ran2=num2str(ran); y3=[ran1 blanks(1) ran2]; fprintf(t,y3); % ram1=['RAMP 1, 1,']; ram2=num2str(ram); y4=[ram1 blanks(1) ram2]; fprintf(t,y4); % otherwise % warndlg ('Entre com valores corretos para potência! Redefinir os parâmetros.'); % fprintf(L,':RESistance:MANual:VSOurce:OPERate OFF'); fprintf(L,'*RST'); fprintf(L,'*CLS'); fprintf(L,':CALC1:STAT OFF'); fprintf(L,':SYST:ZCH ON'); % fclose(L) % Desconecta o lock-in. % % Desligando e desconectando o controlador de temperatura. fprintf(t,'RANGE 1,0'); % Desliga aquecimento. fprintf(t,'*RST'); % fclose(t) % Desconecta o controlador de temperatura. end end % % Antes de iniciar as medidas será enviada a seguinte mensagem para tela. warndlg ('Para interromper as medidas em qualquer momento, pressione,
respectivamente, as teclas "Ctrl" e "C". Os dados serão salvos até o instante em que as teclas forem pressionadas.Uma mensagem de erro sera enviada para o "Command Window", porem os dados não serão perdidos! Para iniciar as medidas aperte qualquer tecla.');
% input('\n\n Aperte qualquer tecla para iniciar as medidas.'); % % Loop para leitura de tensão em função da frequência e temperatura %%%%%%%%% % tabela=zeros(num,6);
∫ntegrada, v. V, n. II NOVEMBRO, 2018
15
for i=1:num fq_ii = fq_ii + fq_p; f=num2str (fq_ii); fq=['FREQ' blanks(1) f]; fprintf(L,fq); fprintf (L,'OUTP? 1') Re=fscanf(L); Real=eval(Re); fprintf (L,'OUTP? 2') Im=fscanf(L); Img=eval(Im); fprintf (L,'OUTP? 3') Fs=fscanf(L); Fas=eval(Fs); fprintf (L,'OUTP? 4') Te=fscanf(L); Tet=eval(Te); fprintf(t,'KRDG?') TempK1=fscanf(t); Temp_K=eval(TempK1); tabela(i,1)=fq_ii; tabela(i,2)=Real; tabela(i,3)=Img; tabela(i,4)=Fas; tabela(i,5)=Tet; tabela(i,6)=Temp_K; M=[tabela]; % %Plotando os dados da tabela de dados. % eixox=M(:,1); % Definindo a variável frequência no eixo x Real=M(:,2); % Definindo a componente Real da tensão no eixo y. Imag=M(:,3); % Definindo a componente Imaginária da tensão no eixo y. % plot(eixox,Real,'g '̂,eixox,Imag,'bd'); legend ('Real','Imag'); title ('Tensão Complexa em função da frequência'); xlabel('Frequência (Hz)'); ylabel('Componentes da Tensão (Volts)'); % %Salvando a matriz na pasta medidas. save(diretorio,'M','-ASCII'); % pause (t_p); % Define o intervalo entre os passos de frequência end % Enviando mensagem de sucesso ao realizar as medidas warndlg ('Medidas realizadas com sucesso! Os dados podem ser acessados em:
"D:\Criostato".');

∫ntegrada, v. V, n. II NOVEMBRO, 2018
16
% % Desligando e desconectando o lock-in. fprintf(L,'*RST'); fprintf(L,'*CLS'); % fclose(L) % Desconecta o lock-in. % % Fim.

∫ntegrada, v. V, n. II NOVEMBRO, 2018
17
EFICIÊNCIA, PRODUTIVIDADE E CUSTOS DAS TESOURAS MANUAL E SEMIMECANIZADA NA PODA DE Pinus taeda L.
Leonidas Kluger1
Gabriel De Magalhães Miranda2
Edson Luis Serpe3
Thiago Floriani Stepka4
Gerson Dos Santos Lisboa5
1BIOMA ENGENHARIA, Pinhão, Paraná, Brasil – [email protected] 2UNICENTRO, Irati, Paraná, Brasil – [email protected] 3LWARCEL, Lençóis Paulista, São Paulo, Brasil – [email protected] 4UDESC, Lages, Santa Catarina, Brasil – [email protected] 5UFSB, Itabuna, Bahia, Brasil – [email protected]
RESUMO: A poda florestal é uma atividade que demanda tempo, mão-de-obra especializada e ferramentas adequadas, envolvendo assim um alto custo na sua execução. O objetivo desta pesquisa foi avaliar a produtividade, a eficiência e os custos envolvidos na atividade de poda utilizando as tesouras manual e semimecanizada. Os dados foram coletados em um povoamento de Pinus taeda L. nas operações de primeira e segunda poda. As tesouras analisadas foram as tesouras Neozelandesa P100 e elétrica F3010. Para a análise técnica foram coletados os tempos das atividades parciais durante o ciclo operacional, determinando a produtividade e a eficiência na produção. A análise dos custos foi realizada por meio do custo operacional e custo de produção. De acordo com os resultados obtidos, na primeira poda as eficiências foram de 92,51% e 98,47% para a tesoura elétrica e manual, respectivamente. Para a segunda poda as eficiências foram de 87,55% para a tesoura elétrica e de 92,92% para a tesoura manual. Nas duas alturas de poda estudadas a ferramenta elétrica teve a maior média de produtividade, sendo 72 árvores.he-1 na primeira poda e de 82 árvores.he-1 na segunda poda. A ferramenta manual produziu a média de 54 árvores.he-1 na primeira poda e 64 árvores.he-1 na segunda poda. Palavras chave: Clearwood; Qualidade; Rendimento; Trato silvicultural.
EFFICIENCY, PRODUCTIVITY AND COST OF MANUAL AND SEMIMECANIZED SCISSORS IN THE PRUNING OF Pinus taeda L.
ABSTRACT: Forest pruning is an activity that demands time, skilled labor and adequate tools, thus involving a high cost in its execution. The objective of this research was to evaluate the productivity, efficiency and costs involved in the pruning activity using the manual and semi-mechanized scissors. The data were collected in a stand of Pinus taeda L. in the first and second pruning operations. The scissors analyzed were the New Zealand scissors P100 and electric F3010. For the technical analysis, the times of the partial activities were collected during the operational cycle, determining the productivity and the efficiency in the production. The cost analysis was performed through the operational cost and cost of production. According to the
∫ntegrada, v. V, n. II NOVEMBRO, 2018
18
results, in the first pruning the efficiencies were of 92.51% and 98.47% for electric and manual scissors, respectively. For the second pruning the efficiencies were 87.55% for the electric scissors and 92.92% for the manual scissors. At the two pruning heights studied, the power tool had the highest average productivity, being 72 trees.he-1 in the first pruning and 82 trees.he-1 in the second pruning. The manual tool produced the average of 54 trees.he-1 in the first pruning and 64 trees.he-1 in the second pruning. Keywords: Clearwood; Quality; Yield; Silvicultural treatment.
1. Introdução
Poda é toda e qualquer retirada de galhos das árvores, em seu todo ou em
partes. Podar, desramar, derramar tem basicamente o mesmo significado (SEITZ,
1995). A poda pode ser denominada de poda seca, quando se elimina galhos
secos/mortos, e poda verde quando galhos ainda vivos são cortados (CHOU e
MACKENZIE, 1988).
O objetivo da poda é obter, num determinado comprimento de tronco, um
núcleo nodoso de tamanho pré-estabelecido (SEITZ, 1995). Segundo Schneider et
al. (1999) o núcleo nodoso é caracterizado como um cilindro central no interior do
fuste, onde estão englobados os nós vivos e mortos. Na região formada adjacente
ao núcleo nodoso, decorrente do crescimento radial do fuste, e encontra-se a
madeira limpa, ou seja, madeira livre de nós (madeira clear).
Segundo Montagu et al. (2003), a poda pode ser realizada de várias maneiras,
onde existem vantagens e desvantagens em termos de custos do trabalho e controle
do tamanho do núcleo nodoso.
A escolha de altura de poda, em geral, é definida para gerar o comprimento
comercial de uma ou duas toras por árvore. Isso ocorre na fase jovem do
povoamento até seis anos de idade, necessitando de várias intervenções, realizadas
com intervalos de um ano (CARDOSO, 2009).
A escolha do número total de árvores que se deve podar por hectare, depende
do espaçamento do plantio e do número de árvores resultante no final da rotação.
Podar um número maior de árvore do que aquele estabelecido no final da rotação
ocasionará em um aumento dos custos (HAWLEY e SMITH, 1972).
As ferramentas utilizadas têm um efeito sobre o consumo de tempo,
produtividade, eficiência e qualidade do trabalho (GIEFING e ZLOTA, 2007). A
escolha do método manual ou semimecanizado, dependerá de uma análise

∫ntegrada, v. V, n. II NOVEMBRO, 2018
19
criteriosa de fatores que envolvem a atividade, como: aumentar o rendimento do
homem, diminuir os custos e tornar as atividades menos cansativas (SEITZ, 1995).
A atividade de poda envolve um grande número de trabalhadores, ferramentas
e equipamentos que, muitas vezes, não proporcionam condições ergonomicamente
corretas de trabalho (LOPES et al., 2013).
Segundo Nutto et al. (2013), a seleção cuidadosa das ferramentas de poda é
essencial para garantir o sucesso da operação. As ferramentas profissionais mais
comuns usadas na prática de silvicultura são as serras e tesouras.
O corte de galhos com serras exige menos esforço físico, embora em
determinadas situações seja mais demorado. Para o rendimento máximo, cada
espécie florestal e dimensão dos galhos tem um modelo de serra mais adequado
para realizar o corte (SEITZ, 1995).
As tesouras de poda podem ser uma alternativa para a poda manual, porém,
elas exigem maiores esforços do operador que as serras de poda, além de, muitas
vezes, terem o posicionamento incorreto para o corte, devido às características da
própria tesoura (SEITZ, 1995).
A tesoura Neozelandesa foi desenvolvida na Nova Zelândia, e se destaca pela
qualidade e corte limpo. O uso deste equipamento garante adequada produtividade
na poda, assegurando um corte com qualidade e minimizando o estresse para as
árvores, além de contemplar a ergonomia e produtividade (BOUTIN, 2018). A
tesoura elétrica foi originalmente utilizada para a vinicultura e foi adaptada para o
corte de ramos em atividades de poda florestal (NUTTO et al., 2013).
O objetivo deste trabalho foi realizar a análise técnica e dos custos das
operações de poda manual e semi-mecanizada em plantios de Pinus taeda L.
2. Material e Métodos
Localização da área de estudo
A área de estudo localiza-se no município de General Carneiro, região Sul do
estado do Paraná, nas coordenadas geográficas 26°19'15.82"S e 51°33'12.38"O, em
uma altitude média de 1.082 m.s.n.m.
O clima da região, segundo a classificação de Köppen, é Subtropical Úmido
Mesotérmico (Cfb), com temperatura média anual de 17 °C.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
20
Base de dados
Os plantios utilizados para a coleta de dados, são de Pinus taeda, implantados
em área de relevo suave ondulado, com espaçamento de 3,0 m x 2,0 m).
A coleta de dados da atividade de primeira poda (até 2,5 m de altura) foi
realizada em plantios com três anos de idade, já a segunda poda (até 3,5 m de
altura), foi realizada em plantios com 4 anos de idade.
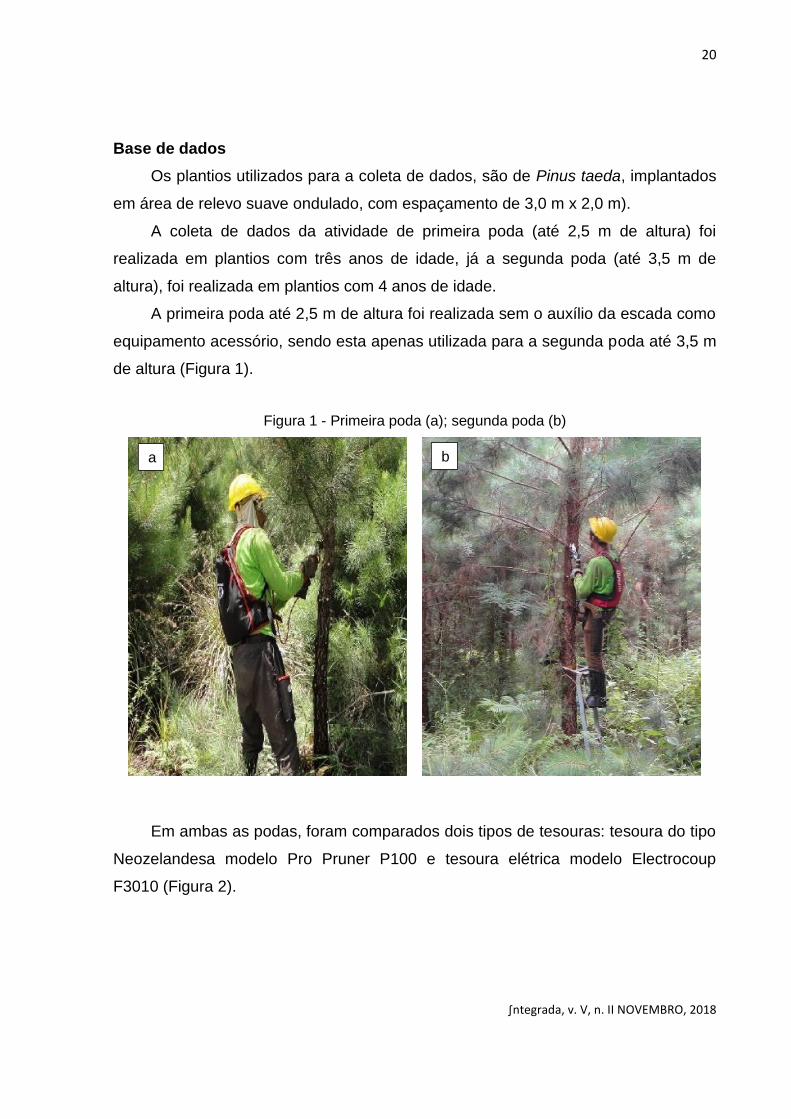
A primeira poda até 2,5 m de altura foi realizada sem o auxílio da escada como
equipamento acessório, sendo esta apenas utilizada para a segunda poda até 3,5 m
de altura (Figura 1).
Figura 1 - Primeira poda (a); segunda poda (b)
Em ambas as podas, foram comparados dois tipos de tesouras: tesoura do tipo
Neozelandesa modelo Pro Pruner P100 e tesoura elétrica modelo Electrocoup
F3010 (Figura 2).
a b

∫ntegrada, v. V, n. II NOVEMBRO, 2018
21
Figura 2 - Tesoura Neozelandesa modelo Pro Pruner P100 (a); tesoura elétrica modelo Electrocoup F3010 (b)
Os dados de tempos foram coletados em um fatorial, onde cada operador (três
operadores), com ambas as ferramentas (duas ferramentas) e em ambas as alturas
de poda (duas alturas de poda), com as medições realizadas em 20 árvores por
bloco, com seis repetições, totalizando 1.440 árvores podadas.
Os tempos necessários para a realização de cada etapa do estudo foram
obtidos por meio de estudo de tempos e movimentos.
Nesse método o cronômetro foi iniciado no começo da atividade e a leitura do
cronômetro realizada ao término da atividade, quando finalizadas as 20 árvores de
cada bloco.
Os tempos totais analisados tomaram como base os seguintes tempos parciais:
• Poda (P): Eliminação de galhos até uma determinada altura;
• Deslocamento (De): Deslocamento do operador de uma área amostral para
outra;
• Tempo de manutenção (Tm): Paradas para afiação e manutenção da tesoura;
• Pausas (Pa): Interrupções pessoais.
Análise técnica
Eficiência
A eficiência foi calculada por meio do tempo de poda efetivo, ou seja, o tempo
de poda, dividido pelo tempo total da operação (OLIVEIRA et al., 2012).
a b

∫ntegrada, v. V, n. II NOVEMBRO, 2018
22
E =Te
Tt x 100
Em que:
E = eficiência da produção;
Te = tempo efetivo para a realização da operação (horas);
Tt = tempo total da operação (horas).
Produtividade
A produtividade das operações foi determinada pela razão entre o número total
de árvores podadas e o tempo total consumido (OLIVEIRA et al., 2012).
Pp =Na
T
Em que:
Pp = Produtividade da poda (árv.h-1);
Na = número de árvores podadas;
T = tempo consumido (horas).
Análise dos custos
A análise de custos foi feita por meio da verificação dos custos operacional e
de produção, onde o custo operacional foi determinado pelo custo total envolvido na
operação da máquina ou equipamento, em reais por hora efetiva de trabalho, e o
custo de produção foi determinado pela razão do custo operacional e a produção
obtida no processo, em reais por hectare (OLIVEIRA et al., 2012).
Os dados em relação às tesouras, como custos e vida útil, foram obtidos junto
às empresas fabricantes. As demais informações foram adquiridas diretamente na
empresa estudada.
Custos Fixos

∫ntegrada, v. V, n. II NOVEMBRO, 2018
23
Para o trabalho foram identificados e obtidos os custos fixos, que ocorrem
independentemente do nível de produção, e nesta categoria foram considerados a
depreciação, juros e os salários dos operadores.
Depreciação
A estimativa do custo de depreciação foi um procedimento utilizado para
recuperar o investimento inicial do equipamento, à medida que ele se torna obsoleto.
Foi utilizado o método da depreciação linear, pois considerou-se que os recursos
financeiros correspondentes ficam no caixa da empresa com remuneração zero
(SIMÕES e FENNER, 2010).
D =Va − Vr
Vu x he
Em que:
D = depreciação (R$.he-1);
Va = valor de aquisição (R$);
Vr = valor de revenda (R$);
Vu = vida útil da ferramenta;
he = total de horas efetivas por ano.
Juros
Os custos de juros foram calculados utilizando a expressão (FREITAS, 2005):
J =IMA x i
he
Em que:
J = valor dos juros (R$.he-1);
IMA = investimento médio anual;
i = taxa percentual de juros;
he = total de horas efetivas por ano, dado pela seguinte fórmula:
∫ntegrada, v. V, n. II NOVEMBRO, 2018
24
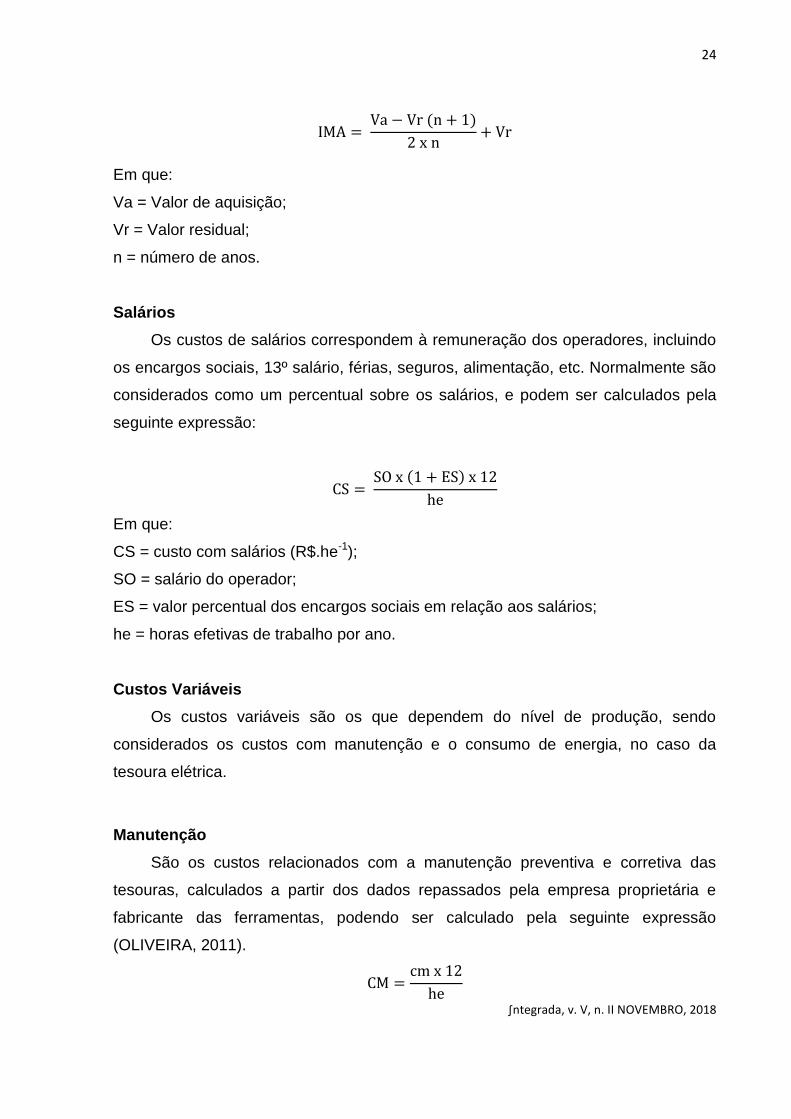
IMA = Va − Vr (n + 1)
2 x n+ Vr
Em que:
Va = Valor de aquisição;
Vr = Valor residual;
n = número de anos.
Salários
Os custos de salários correspondem à remuneração dos operadores, incluindo
os encargos sociais, 13º salário, férias, seguros, alimentação, etc. Normalmente são
considerados como um percentual sobre os salários, e podem ser calculados pela
seguinte expressão:
CS = SO x (1 + ES) x 12
he
Em que:
CS = custo com salários (R$.he-1);
SO = salário do operador;
ES = valor percentual dos encargos sociais em relação aos salários;
he = horas efetivas de trabalho por ano.
Custos Variáveis
Os custos variáveis são os que dependem do nível de produção, sendo
considerados os custos com manutenção e o consumo de energia, no caso da
tesoura elétrica.
Manutenção
São os custos relacionados com a manutenção preventiva e corretiva das
tesouras, calculados a partir dos dados repassados pela empresa proprietária e
fabricante das ferramentas, podendo ser calculado pela seguinte expressão
(OLIVEIRA, 2011).
CM =cm x 12
he
∫ntegrada, v. V, n. II NOVEMBRO, 2018
25
Em que:
CM = custo com a manutenção (R$.he-1);
cm = custo mensal com manutenção;
he = total de horas efetivas de trabalho por ano.
Energia elétrica
São os custos referentes ao consumo de energia elétrica necessária para
carregar a bateria da tesoura e pode ser calculado pela seguinte expressão:
CE =P x nh x nd
he x 1000 x tr
Em que:
CE = custo de energia (R$.he-1);
P = potência da ferramenta (W);
nh = número de horas utilizadas por dia;
nd = número de dias de uso no ano;
tr = tarifa (R$/KWh);
he = total de horas efetivas de trabalho por ano.
Análise estatística
As médias de produtividade foram comparadas pelo teste T, ao nível de 5% de
significância. Os dados de produtividade das duas ferramentas foram submetidos à
análise de variância (ANOVA) de fator único.
3. Resultados e Discussão
Eficiência
A tesoura elétrica teve que ser usada em conjunto com um serrote devido ao
diâmetro excessivo de alguns ramos, devido à abertura de corte não ser grande o
suficiente para cortar alguns galhos (diâmetro máximo de corte de 35 mm).
∫ntegrada, v. V, n. II NOVEMBRO, 2018
26
Na primeira poda as eficiências foram de 92,51% e 98,47% para a tesoura
elétrica e manual, respectivamente. Para a segunda poda as eficiências foram de
87,55% para a tesoura elétrica e de 92,92% para a tesoura manual.
A manutenção das ferramentas, em geral, foi realizada durante as horas de
almoço e paradas para descanso, diminuindo assim, as pausas durante a jornada de
trabalho, o que explica a alta eficiência das ferramentas.
Segundo Nutto et al. (2013) na poda de eucalipto, o tempo de manutenção é de
3 minutos a cada hora de trabalho para a tesoura elétrica F3010, e de 5 minutos a
cada 4 horas de trabalho para a tesoura Neozelandesa P100.
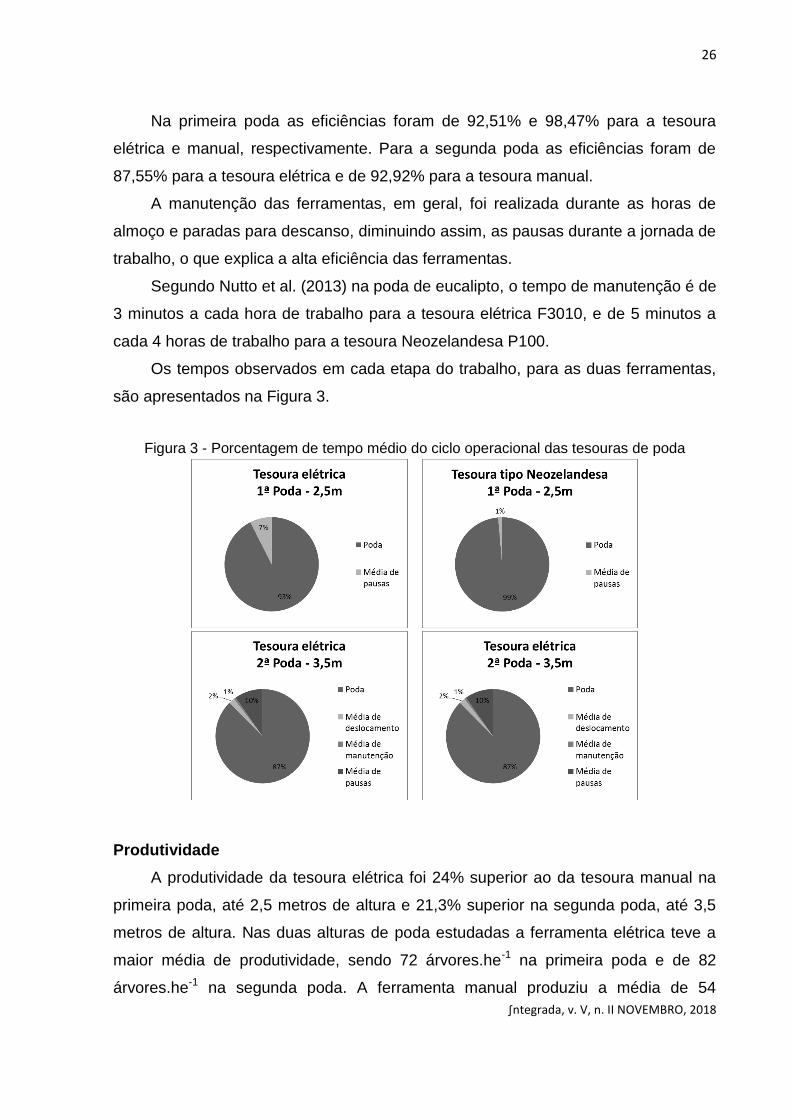
Os tempos observados em cada etapa do trabalho, para as duas ferramentas,
são apresentados na Figura 3.
Figura 3 - Porcentagem de tempo médio do ciclo operacional das tesouras de poda
Produtividade
A produtividade da tesoura elétrica foi 24% superior ao da tesoura manual na
primeira poda, até 2,5 metros de altura e 21,3% superior na segunda poda, até 3,5
metros de altura. Nas duas alturas de poda estudadas a ferramenta elétrica teve a
maior média de produtividade, sendo 72 árvores.he-1 na primeira poda e de 82
árvores.he-1 na segunda poda. A ferramenta manual produziu a média de 54
∫ntegrada, v. V, n. II NOVEMBRO, 2018
27
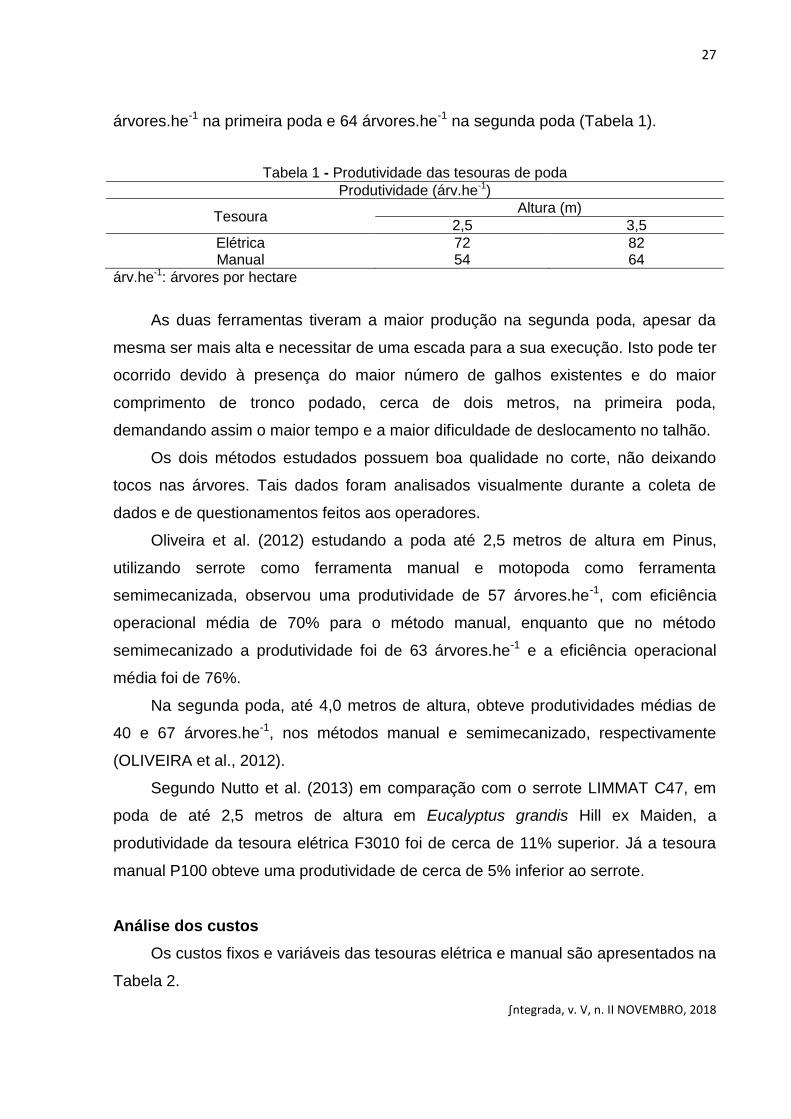
árvores.he-1 na primeira poda e 64 árvores.he-1 na segunda poda (Tabela 1).
Tabela 1 - Produtividade das tesouras de poda
Produtividade (árv.he-1)
Tesoura Altura (m)
2,5 3,5
Elétrica 72 82 Manual 54 64
árv.he-1: árvores por hectare
As duas ferramentas tiveram a maior produção na segunda poda, apesar da
mesma ser mais alta e necessitar de uma escada para a sua execução. Isto pode ter
ocorrido devido à presença do maior número de galhos existentes e do maior
comprimento de tronco podado, cerca de dois metros, na primeira poda,
demandando assim o maior tempo e a maior dificuldade de deslocamento no talhão.
Os dois métodos estudados possuem boa qualidade no corte, não deixando
tocos nas árvores. Tais dados foram analisados visualmente durante a coleta de
dados e de questionamentos feitos aos operadores.
Oliveira et al. (2012) estudando a poda até 2,5 metros de altura em Pinus,
utilizando serrote como ferramenta manual e motopoda como ferramenta
semimecanizada, observou uma produtividade de 57 árvores.he-1, com eficiência
operacional média de 70% para o método manual, enquanto que no método
semimecanizado a produtividade foi de 63 árvores.he-1 e a eficiência operacional
média foi de 76%.
Na segunda poda, até 4,0 metros de altura, obteve produtividades médias de
40 e 67 árvores.he-1, nos métodos manual e semimecanizado, respectivamente
(OLIVEIRA et al., 2012).
Segundo Nutto et al. (2013) em comparação com o serrote LIMMAT C47, em
poda de até 2,5 metros de altura em Eucalyptus grandis Hill ex Maiden, a
produtividade da tesoura elétrica F3010 foi de cerca de 11% superior. Já a tesoura
manual P100 obteve uma produtividade de cerca de 5% inferior ao serrote.
Análise dos custos
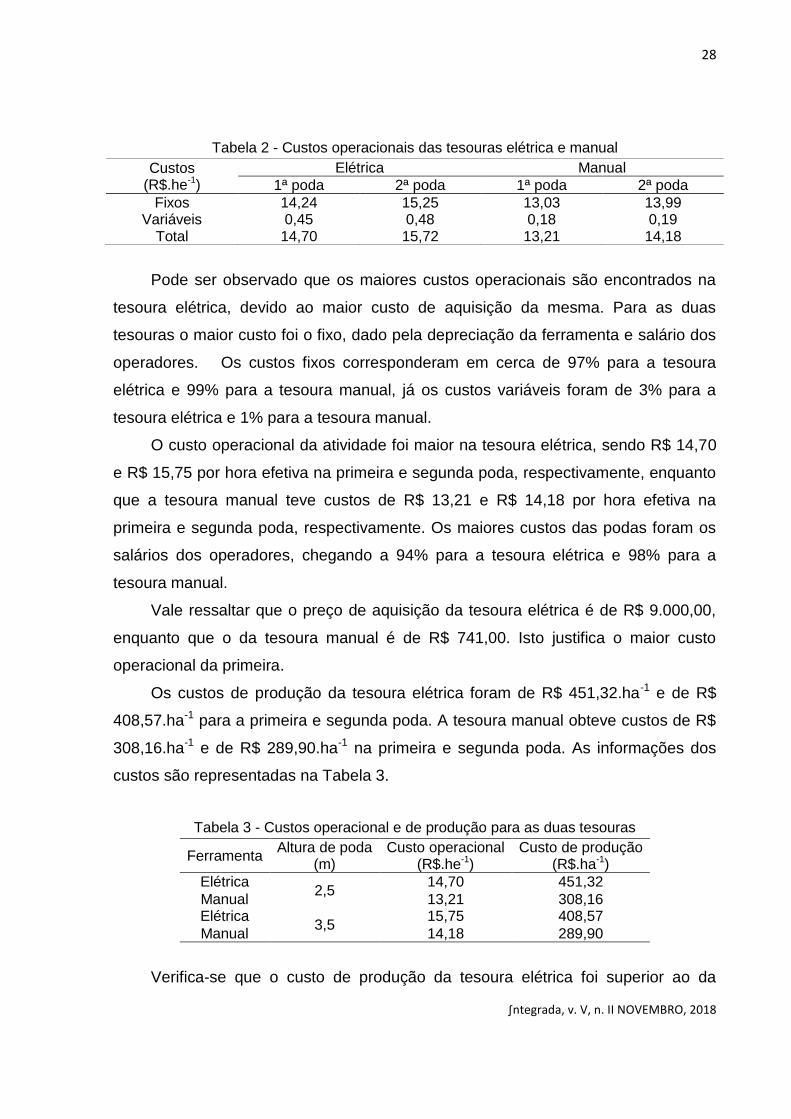
Os custos fixos e variáveis das tesouras elétrica e manual são apresentados na
Tabela 2.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
28
Tabela 2 - Custos operacionais das tesouras elétrica e manual
Custos (R$.he-1)
Elétrica Manual
1ª poda 2ª poda 1ª poda 2ª poda
Fixos 14,24 15,25 13,03 13,99 Variáveis 0,45 0,48 0,18 0,19
Total 14,70 15,72 13,21 14,18
Pode ser observado que os maiores custos operacionais são encontrados na
tesoura elétrica, devido ao maior custo de aquisição da mesma. Para as duas
tesouras o maior custo foi o fixo, dado pela depreciação da ferramenta e salário dos
operadores. Os custos fixos corresponderam em cerca de 97% para a tesoura
elétrica e 99% para a tesoura manual, já os custos variáveis foram de 3% para a
tesoura elétrica e 1% para a tesoura manual.
O custo operacional da atividade foi maior na tesoura elétrica, sendo R$ 14,70
e R$ 15,75 por hora efetiva na primeira e segunda poda, respectivamente, enquanto
que a tesoura manual teve custos de R$ 13,21 e R$ 14,18 por hora efetiva na
primeira e segunda poda, respectivamente. Os maiores custos das podas foram os
salários dos operadores, chegando a 94% para a tesoura elétrica e 98% para a
tesoura manual.
Vale ressaltar que o preço de aquisição da tesoura elétrica é de R$ 9.000,00,
enquanto que o da tesoura manual é de R$ 741,00. Isto justifica o maior custo
operacional da primeira.
Os custos de produção da tesoura elétrica foram de R$ 451,32.ha-1 e de R$
408,57.ha-1 para a primeira e segunda poda. A tesoura manual obteve custos de R$
308,16.ha-1 e de R$ 289,90.ha-1 na primeira e segunda poda. As informações dos
custos são representadas na Tabela 3.
Tabela 3 - Custos operacional e de produção para as duas tesouras
Ferramenta Altura de poda
(m) Custo operacional
(R$.he-1) Custo de produção
(R$.ha-1)
Elétrica 2,5
14,70 451,32
Manual 13,21 308,16 Elétrica
3,5 15,75 408,57
Manual 14,18 289,90
Verifica-se que o custo de produção da tesoura elétrica foi superior ao da
∫ntegrada, v. V, n. II NOVEMBRO, 2018
29
tesoura manual nas duas alturas de poda estudadas, apresentando valores
superiores em 46,46% para a primeira poda e 40,93% para segunda.
Oliveira (2012), analisando a poda em Pinus no norte do Paraná, utilizando
serrote como ferramenta manual e motopoda como ferramenta semimecanizada,
observou um custo de R$ 249,52.ha-1 para a ferramenta manual e de R$ 448,91.ha-1
para a ferramenta semimecanizada, em podas de até 2,5 metros de altura. Os
custos para podas de até 4,0 metros de altura foram de R$ 349,93.ha-1 para a
ferramenta manual e de R$ 433,91.ha-1 para a ferramenta semimecanizada.
4. Conclusões
As duas tesouras apresentaram boa qualidade em relação ao corte, não
deixando tocos e não ocasionando injúrias nas árvores.
A segunda poda apresentou melhor produtividade em relação a primeira,
decorrente do menor número de galhos existentes e do menor comprimento de
tronco podado.
A tesoura elétrica teve a maior produtividade e maior custo operacional, devido
ao elevado custo de aquisição, que é cerca de 90% superior ao da tesoura manual.
Apesar da menor produtividade, a tesoura manual apresentou o menor custo
de produção, apresentando-se viável economicamente.
5. Referências Bibliográficas
BOUTIN. Tesourão Neozelandês Pro Pruner P100, 2018. Disponível em: http://www.boutin.com.br/p/2131/tesourao-neozelandes-pro-pruner-p100 CARDOSO, D. J. Viabilidade técnica e econômica da poda em plantações de Pinus taeda e Pinus elliottii. 2009. 144 p. Tese (Doutorado em Ciências Florestais) Universidade Federal do Paraná Curitiba, PR. CHOU, C. K. S.; MACKENZIE, M. Effect of pruning intensity and season on Diplodia pinea infection of Pinus radiata stem through pruning wounds. Eur. Journal Forest Pathology, v. 18, p. 437-444, 1988. GIEFING, D. F.; ZLOTA, M. Efficiency of pruning scots pine (Pinus sylvestris L.) using different types os saws. Acta Sci. Pol., v. 6, n. 4, p. 81-88, 2007.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
30
FREITAS, K. E. Análise técnica e econômica da colheita florestal mecanizada. 2005. 21 p. Monografia (Engenharia Elétrica e de Produção) Universidade Federal de Viçosa, Viçosa, MG. HAWLEY, R. C.; SMITH, D. M. Silvicultura practica. Barcelona: Omega, 1972. LOPES, E. S. et al. Avaliação biomecânica de trabalhadores nas atividades de poda manual e semimecanizada de Pinus taeda. Floresta, v. 43, n. 1, p. 9-18, 2013. MONTAGU, K. et al. The biology and silviculture of pruning planted eucalypts for clear wood production-a review. Forest Ecology and Management, v. 179, n. 1-3, p. 1-13, 2003. NUTTO, L. et al. Ergonomic aspects and productivity of different pruning tools for a first pruning lift of Eucalyptus grandis Hill ex Maiden. Silva Fennica, v. 47, n. 4, p. 14, 2013. OLIVEIRA, F. M. Análise operacional, ergonômica e de custos das atividades de roçada e poda em plantios florestais. 2011. 66 p. Dissertação (Mestrado em Ciências Florestais) Universidade Federal do Paraná. Curitiba, PR. OLIVEIRA, F. M. et al. Avaliação técnica e de custos de poda manual e semimecanizada em plantios de Pinus taeda. Floresta, v. 42, n. 4, p. 691-700, 2012. SIMÕES, D.; FENNER, P. T. Avaliação técnica e econômica do forwarder na extração de em povoamento de eucalipto de primeiro corte. Floresta, v. 40, n. 4, p. 711-720, 2010. SCHNEIDER, P. R. et al. Efeito da intensidade de desrama na produção de Pinus elliottii Engelm, implantado em solo pobre, no estado do Rio Grande do Sul. Ciência Florestal, v. 9, n. 1, p. 35-46, 1999. SEITZ, R. A. Manual de poda de espécies arbóreas florestais. Curitiba: FUPEF, 1995. 56 p.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
31
EMERGÊNCIA E CRESCIMENTO INICIAL DE PROGÊNIES DE Enterolobium Schomburgkii Benth.
Jhuan Lucas Melo Maciel¹*
Edwin Camacho Palomino²
1Mestrando em Ciência Florestal. UNESP – Universidade Estadual Paulista “Júlio de
Mesquita Filho” – Botucatu/SP, Brasil. * [email protected] 2Professor Adjunto do Instituto de Biodiversidade e Florestas da Universidade Federal do
Oeste do Pará – Santarém/PA, Brasil.
Resumo: Enterolobium schomburgkii apresenta poucos estudos científicos relacionados a emergência e desenvolvimento inicial. Por esta razão, o objetivo deste trabalho foi avaliar e caracterizar o crescimento inicial de diferentes progênies selecionadas de Enterolobium schomburgkii Benth em fase de viveiros, visando a padronização do crescimento inicial. O experimento foi conduzido no Viveiro de Produção de Mudas, num delineamento experimental inteiramente casualizado, com cinco tratamentos (diferentes progênies), cujas as sementes foram coletadas de cinco matrizes nativas de polinização aberta, no município de Santarém. Foi avaliado emergência das plântulas e crescimento inicial da altura da parte aérea (cm) durante aos 7, 14, 21, 28, 35 e 42 DAS. A emergência das plântulas de Enterolobium schomburgkii ocorre ao quinto e sexto DAS não havendo diferenças significativas entre as progênies quanto ao crescimento inicial da altura. O crescimento inicial das mudas de Enterolobium schomburgkii podem ser descrito por um modelo sigmoidal simples. Palavras chave: Faveira-orelha-de-macaco, melhoramento genético, mudas florestais e desenvolvimento inicial.
EMERGENCY AND INITIAL GROWTH OF PROGENIES Enterolobium Schomburgkii Benth.
Abstract: Enterolobium schomburgkii presents few scientific studies related to emergency and initial development. For this reason, the objective of this work was to evaluate and characterize the initial growth of different progenies selected from Enterolobium schomburgkii Benth in the nursery phase, aiming at the standardization of the initial growth. The experiment was carried out in a seedling production nursery, in a completely randomized experimental design, with five treatments (different progenies), whose seeds were collected from five native open pollinated matrices, in the municipality of Santarém. Seedling emergence and initial shoot height growth (cm) were evaluated during 7, 14, 21, 28, 35 and 42 DAS. The emergence of Enterolobium schomburgkii seedlings occurs at the fifth and sixth DAS, with no significant differences between the progenies regarding the initial height growth. The initial growth of the Enterolobium schomburgkii seedlings can be described by a simple sigmoidal model. Keywords: Faveira-monkey ear, genetic improvement, forest seedlings and initial development.

∫ntegrada, v. V, n. II NOVEMBRO, 2018
32
1. Introdução
Produtividade através de um ganho por seleção de um recurso genético,
acrescenta valor econômico ao produto florestal, tornando a silvicultura mais
lucrativa, onde testes de procedências ou testes de progênies apresentam se como
estratégias para seleção e caracterização dos padrões de herança em espécies
florestais, podendo conferir a variação entre os indivíduos e dentro de progênies e
procedências (ROCHA et al., 2009).
Desse modo, os testes de progênies são úteis para conhecer a amplitude e a
natureza da variabilidade genética disponíveis, visando mensurar os ganhos com a
seleção e prenunciar o melhor método de seleção no programa de melhoramento
(COSTA et al., 2000).
A técnica de seleção massal com teste de progênie é um dos métodos mais
antigos no melhoramento de plantas e amplamente utilizados no pré-melhoramento
(ARAÚJO, 2000), no qual, faz-se a introdução, avaliação e seleção de uma
população de plantas com base em suas características fenotípicas, com o objetivo
de somar a frequência dos alelos favoráveis, melhorando assim a característica da
população (VIEIRA, 2002).
A espécie Enterolobium schomburgkii Benth. pertencente à família Fabaceae, é
conhecida popularmente como faveira-orelha-de-macaco ou sucupira amarela,
ocorrendo na região amazônica, apresenta ampla distribuição geográfica, ocorrendo
desde a América Central, Amazônia legal (BRAGA, SOUSA, ALMEIDA, 2009), é
uma árvore de 10 a 50 m de altura e 12 a 80 cm de DAP, heliófila e uma das
leguminosas que fazem associação com bactérias fixadoras de nitrogênio, portanto
pode ser recomendada para o reflorestamento em áreas com solos pobres (RAMOS
e FERRAZ, 2008).
Segundo Mesquita (1990) o fruto de E. schomburgkii é do tipo indeiscente,
contorcido, de cor castanha a negra e de consistência sublenhosa, com 3-4 cm de
diâmetro por 1-3 cm de espessura, o epicarpo apresenta superfície glabra, o
mesocarpo tem consistência fibrosa a lenhosa e coloração castanha e o endocarpo
é esbranquiçado (EIRA et al., 1993). A semente é elíptica, de coloração amarelo-
enxofre, com as dimensões de 0,7 cm de comprimento por 0,4 cm de largura, os
cotilédones são planos, carnosos, com eixo embrionário reto, apresentando plúmula

∫ntegrada, v. V, n. II NOVEMBRO, 2018
33
bem desenvolvida, multipartida e diferenciada em pinas (RAMOS e FERRAZ, 2008).
Sementes de E. schomburgkii apresentam dormência física, provocada por
impermeabilidade do tegumento, sendo necessária a aplicação de tratamentos de
quebra de dormência, como escarificação mecânica (SOUZA e VARELA, 1989), e a
germinação de E. schomburgkii foi descrita por Albuquerque (1993) como sendo do
tipo epígea, criptocotiledonar.
Apesar de ser uma cultura de grande potencial, E. schomburgkii é pouco
estudada, existindo deficiência de estudos científicos relacionados a emergência e
desenvolvimento inicial. Por esta razão, o objetivo deste trabalho foi avaliar e
caracterizar o crescimento inicial de diferentes progênies selecionadas de
Enterolobium schomburgkii Benth em fase de viveiros, visando a padronização do
crescimento inicial.
2. Material e Métodos
O experimento foi conduzido no Viveiro de Produção de Mudas da
Universidade Federal do Oeste do Pará, localizado no município de Santarém - PA,
que apresenta um clima tropical, na maioria dos meses do ano existe uma
pluviosidade significativa, pluviosidade média anual é de 2150 mm e temperatura
média anual de 28 °C.
O delineamento experimental utilizado foi o inteiramente casualizado,
utilizando-se de cinco tratamentos (progênies). Adotou-se cinco repetições de 10
plantas cada, totalizando 250 mudas no experimento. As mesmas foram mantidas
em casa de sombra com 50% de luminosidade, através do uso de tela de
polipropileno preto (“sombrite”), com uma irrigação manual diária.
Para o desenvolvimento do experimento utilizou-se a espécie Fava-Orelha de
Negro (Enterolobium schomburgkii Benth), cujas as sementes foram coletadas de
cinco matrizes nativas de polinização aberta, no município de Santarém, Pará.
Foram distribuídas duas sementes por recipiente, com profundidade aproximada de
1,0 cm. Como recipientes, foram utilizados sacos de polietileno nas dimensões de 15
x 20 cm com perfurações laterais, contendo como substrato 50% de terra preta de
índio, 25% serragem e 25% de palha de arroz carbonizada (cada saco recebeu a
mesma quantidade de substrato em seu recipiente), para todas as progênies. Após
∫ntegrada, v. V, n. II NOVEMBRO, 2018
34
emergência das sementes foi realizado o desbaste, deixando apenas a planta mais
vigorosa.
Para emergência das plântulas em dias após semeadura – DAS, foi observado
diariamente, durante os sete primeiros dias. Aos 7, 14, 21, 28, 35 e 42 dias após a
semeadura realizou-se a mensuração da altura da parte aérea (cm) de todas as
mudas, por meio de régua milimetrada, totalizando cinco coletas, até 42 dias após
semeadura (final do experimento).
Os dados foram submetidos à análise de variância e, quando significativo, as
médias comparadas entre si pelo teste de Tukey (p < 0,05). O crescimento inicial foi
analisado por meio de regressão linear, e o valor de F foi corrigido; sendo
apresentadas somente as equações cujos coeficientes de maior grau foram
significativos (p < 0,05). Todas as análises estatísticas foram realizadas utilizando-se
o software Minitab® 17, já para confecção dos gráficos foram realizadas utilizando-se
o software SigmaPlot® 11.
3. Resultados e Discussão
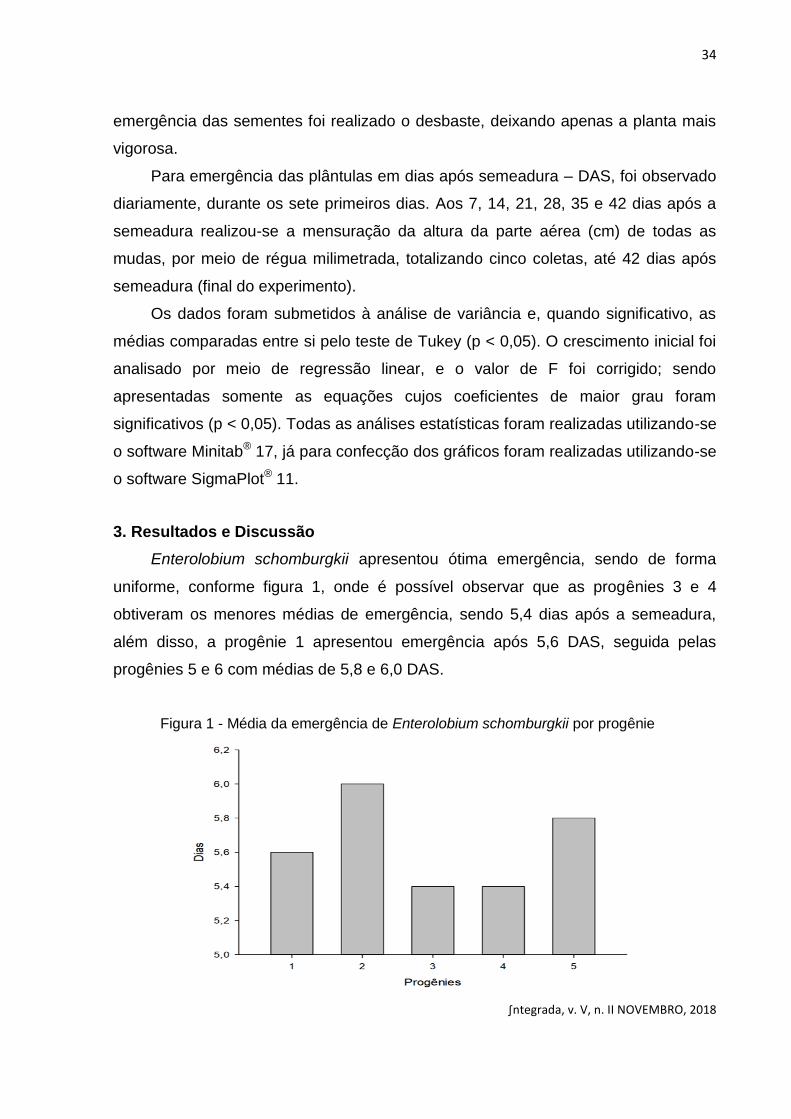
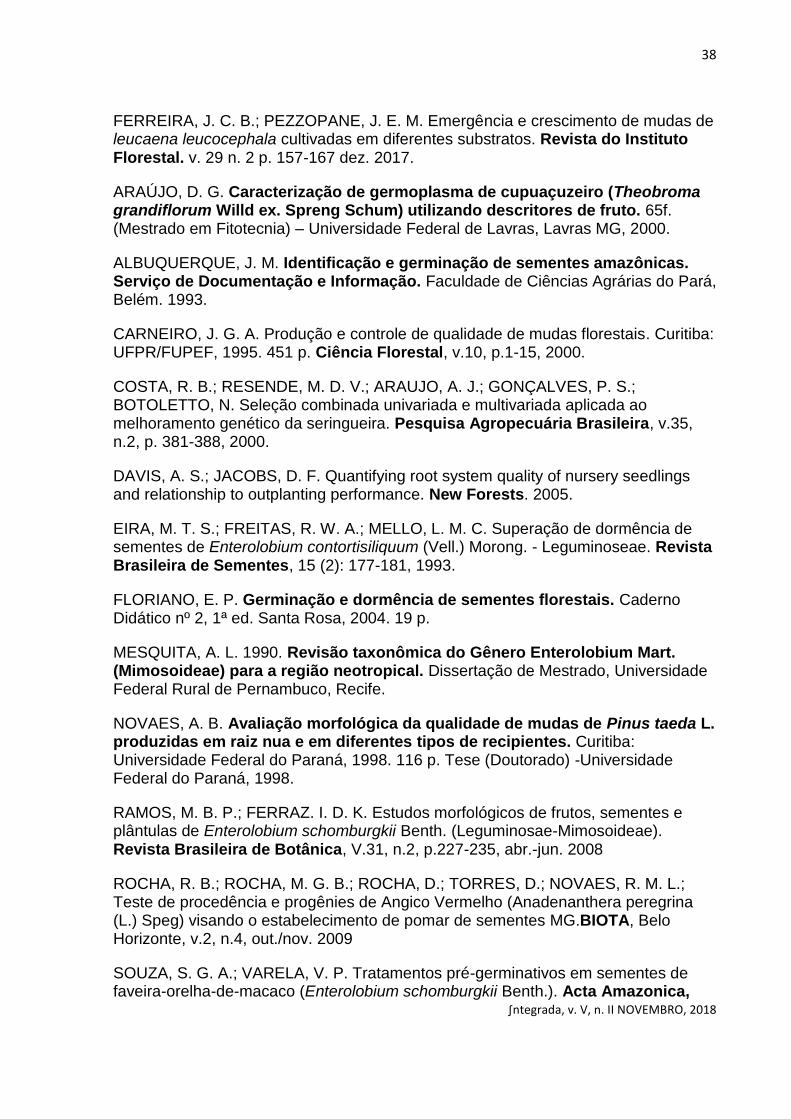
Enterolobium schomburgkii apresentou ótima emergência, sendo de forma
uniforme, conforme figura 1, onde é possível observar que as progênies 3 e 4
obtiveram os menores médias de emergência, sendo 5,4 dias após a semeadura,
além disso, a progênie 1 apresentou emergência após 5,6 DAS, seguida pelas
progênies 5 e 6 com médias de 5,8 e 6,0 DAS.
Figura 1 - Média da emergência de Enterolobium schomburgkii por progênie
∫ntegrada, v. V, n. II NOVEMBRO, 2018
35
Ramos e Ferraz (2008) menciona que a germinação das sementes de E.
schomburgkii foram facilmente obtidas em todas matrizes estudadas,
proporcionando alta porcentagem de germinação, entre 92% e 100% aos 3-5 dias
após semeadura, demostrando que os resultados para emergência estão de acordo
com a germinação.
A germinação rápida e uniforme, seguida por uma imediata emergência das
plântulas, são características altamente desejáveis (FLORIANO, 2004), pois quanto
mais tempo a plântula permanecer nos estágios iniciais de desenvolvimento e
demorar a emergir no solo, mais vulnerável estará às condições adversas do meio
(AMARAL et al, 2017).
A produção de sementes pode ser afetada por características genéticas e
condições ambientais durante seu processo de formação, resultando em variações
entre lotes de diferentes anos de frutificação e provenientes de diferentes matrizes
de coleta (RAMOS e FERRAZ, 2008). No presente trabalho podemos observar que
para emergência, não houve diferenças significativas, podendo está relacionado
com a obtenção do material, onde a coleta das sementes foram obtidas no mesmo
período para todas progênies do experimento.
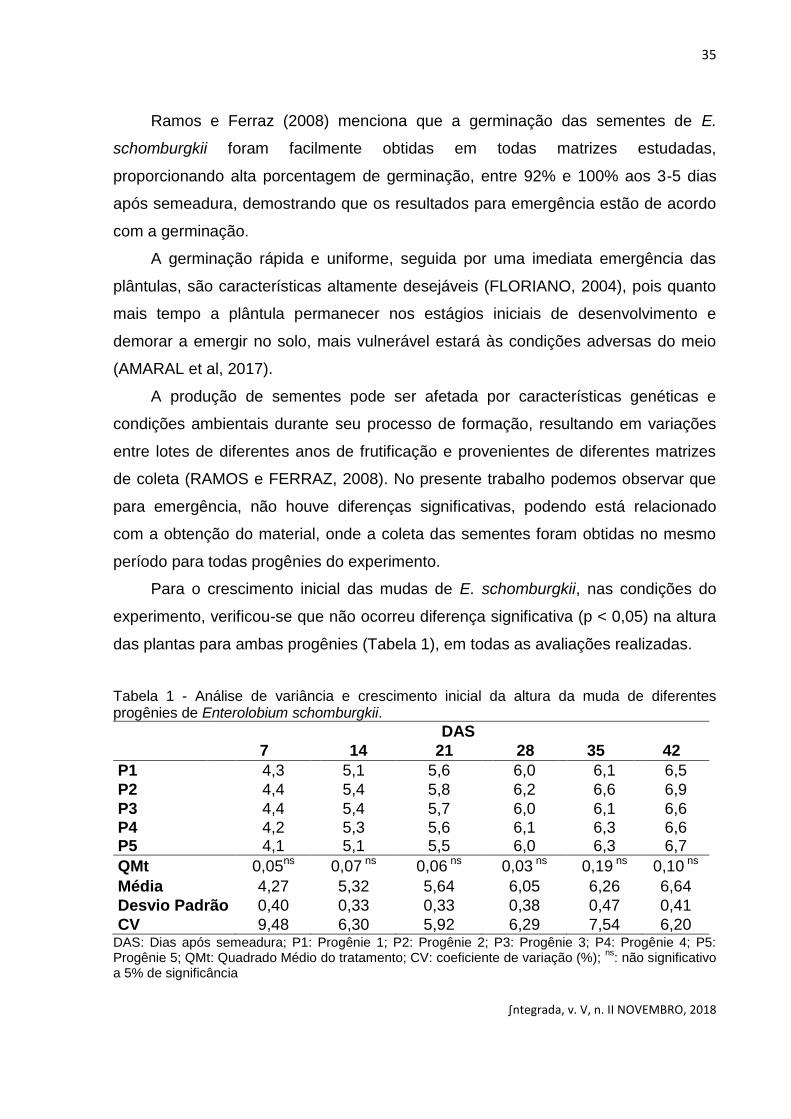
Para o crescimento inicial das mudas de E. schomburgkii, nas condições do
experimento, verificou-se que não ocorreu diferença significativa (p < 0,05) na altura
das plantas para ambas progênies (Tabela 1), em todas as avaliações realizadas.
Tabela 1 - Análise de variância e crescimento inicial da altura da muda de diferentes progênies de Enterolobium schomburgkii.
DAS
7 14 21 28 35 42
P1 4,3 5,1 5,6 6,0 6,1 6,5
P2 4,4 5,4 5,8 6,2 6,6 6,9
P3 4,4 5,4 5,7 6,0 6,1 6,6
P4 4,2 5,3 5,6 6,1 6,3 6,6 P5 4,1 5,1 5,5 6,0 6,3 6,7
QMt 0,05ns 0,07 ns
0,06 ns 0,03 ns
0,19 ns 0,10 ns
Média 4,27 5,32 5,64 6,05 6,26 6,64
Desvio Padrão 0,40 0,33 0,33 0,38 0,47 0,41
CV 9,48 6,30 5,92 6,29 7,54 6,20 DAS: Dias após semeadura; P1: Progênie 1; P2: Progênie 2; P3: Progênie 3; P4: Progênie 4; P5: Progênie 5; QMt: Quadrado Médio do tratamento; CV: coeficiente de variação (%);
ns: não significativo
a 5% de significância
∫ntegrada, v. V, n. II NOVEMBRO, 2018
36
Essa não diferença significativa pode estar relacionada a emergência que
ocorreu por igual em todas progênies, demonstrando uniformidade nesse processo.
Analisando os valores médios da altura das mudas de E. schomburgkii, nota-se que
o coeficiente de variação foi considerado baixo, apresentando dados uniformes e
robustos, onde podemos citar que a média representa significativamente todas as
progênies estudadas.
O crescimento da faveira-orelha-de-macaco é lento, passando de 5,32 cm aos
14 DAS para 6,64 aos 42 DAS (média geral das progênies), variando de 6,5 a 6,9
cm, apresentando um crescimento médio de 1,32 cm em 28 dias.
A altura de mudas está entre os mais importantes parâmetros morfológicos
para estimar o crescimento e desenvolvimento de mudas (TSAKALDIMI et al., 2013;
DAVIS e JACOBS, 2005), sendo bastante correlacionados para uma boa
estabilidade e desenvolvimento das mudas quando levadas para campo
(CARNEIRO, 1995; NOVAES, 1998).
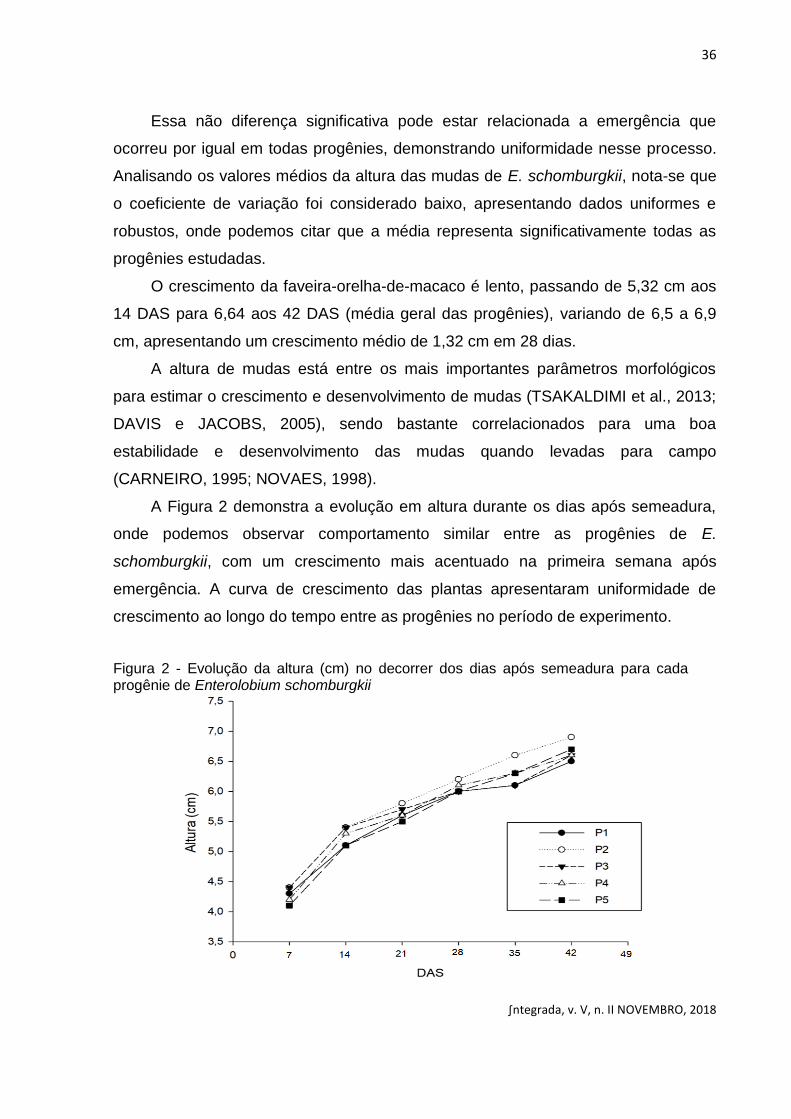
A Figura 2 demonstra a evolução em altura durante os dias após semeadura,
onde podemos observar comportamento similar entre as progênies de E.
schomburgkii, com um crescimento mais acentuado na primeira semana após
emergência. A curva de crescimento das plantas apresentaram uniformidade de
crescimento ao longo do tempo entre as progênies no período de experimento.
Figura 2 - Evolução da altura (cm) no decorrer dos dias após semeadura para cada progênie de Enterolobium schomburgkii
∫ntegrada, v. V, n. II NOVEMBRO, 2018
37
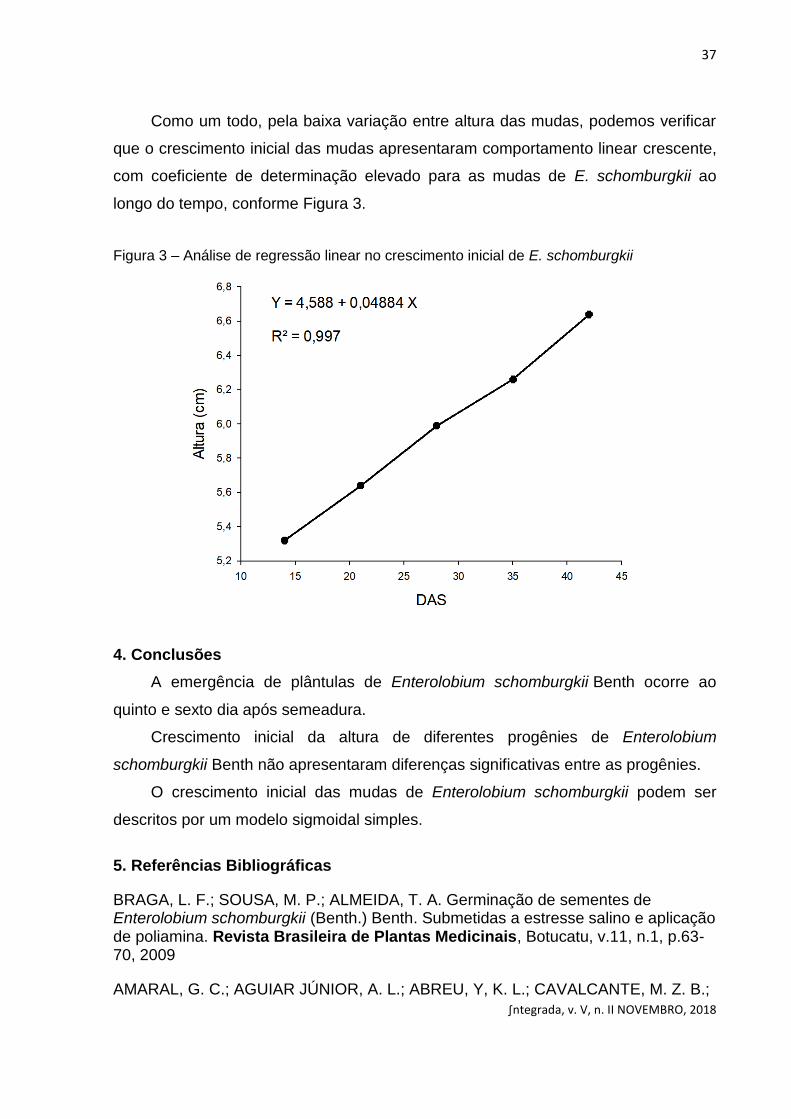
Como um todo, pela baixa variação entre altura das mudas, podemos verificar
que o crescimento inicial das mudas apresentaram comportamento linear crescente,
com coeficiente de determinação elevado para as mudas de E. schomburgkii ao
longo do tempo, conforme Figura 3.
Figura 3 – Análise de regressão linear no crescimento inicial de E. schomburgkii
4. Conclusões
A emergência de plântulas de Enterolobium schomburgkii Benth ocorre ao
quinto e sexto dia após semeadura.
Crescimento inicial da altura de diferentes progênies de Enterolobium
schomburgkii Benth não apresentaram diferenças significativas entre as progênies.
O crescimento inicial das mudas de Enterolobium schomburgkii podem ser
descritos por um modelo sigmoidal simples.
5. Referências Bibliográficas
BRAGA, L. F.; SOUSA, M. P.; ALMEIDA, T. A. Germinação de sementes de Enterolobium schomburgkii (Benth.) Benth. Submetidas a estresse salino e aplicação de poliamina. Revista Brasileira de Plantas Medicinais, Botucatu, v.11, n.1, p.63-70, 2009
AMARAL, G. C.; AGUIAR JÚNIOR, A. L.; ABREU, Y, K. L.; CAVALCANTE, M. Z. B.;
∫ntegrada, v. V, n. II NOVEMBRO, 2018
38
FERREIRA, J. C. B.; PEZZOPANE, J. E. M. Emergência e crescimento de mudas de leucaena leucocephala cultivadas em diferentes substratos. Revista do Instituto Florestal. v. 29 n. 2 p. 157-167 dez. 2017.
ARAÚJO, D. G. Caracterização de germoplasma de cupuaçuzeiro (Theobroma grandiflorum Willd ex. Spreng Schum) utilizando descritores de fruto. 65f. (Mestrado em Fitotecnia) – Universidade Federal de Lavras, Lavras MG, 2000.
ALBUQUERQUE, J. M. Identificação e germinação de sementes amazônicas. Serviço de Documentação e Informação. Faculdade de Ciências Agrárias do Pará, Belém. 1993.
CARNEIRO, J. G. A. Produção e controle de qualidade de mudas florestais. Curitiba: UFPR/FUPEF, 1995. 451 p. Ciência Florestal, v.10, p.1-15, 2000.
COSTA, R. B.; RESENDE, M. D. V.; ARAUJO, A. J.; GONÇALVES, P. S.; BOTOLETTO, N. Seleção combinada univariada e multivariada aplicada ao melhoramento genético da seringueira. Pesquisa Agropecuária Brasileira, v.35, n.2, p. 381-388, 2000.
DAVIS, A. S.; JACOBS, D. F. Quantifying root system quality of nursery seedlings and relationship to outplanting performance. New Forests. 2005.
EIRA, M. T. S.; FREITAS, R. W. A.; MELLO, L. M. C. Superação de dormência de sementes de Enterolobium contortisiliquum (Vell.) Morong. - Leguminoseae. Revista Brasileira de Sementes, 15 (2): 177-181, 1993.
FLORIANO, E. P. Germinação e dormência de sementes florestais. Caderno Didático nº 2, 1ª ed. Santa Rosa, 2004. 19 p.
MESQUITA, A. L. 1990. Revisão taxonômica do Gênero Enterolobium Mart. (Mimosoideae) para a região neotropical. Dissertação de Mestrado, Universidade Federal Rural de Pernambuco, Recife.
NOVAES, A. B. Avaliação morfológica da qualidade de mudas de Pinus taeda L. produzidas em raiz nua e em diferentes tipos de recipientes. Curitiba: Universidade Federal do Paraná, 1998. 116 p. Tese (Doutorado) -Universidade Federal do Paraná, 1998.
RAMOS, M. B. P.; FERRAZ. I. D. K. Estudos morfológicos de frutos, sementes e plântulas de Enterolobium schomburgkii Benth. (Leguminosae-Mimosoideae). Revista Brasileira de Botânica, V.31, n.2, p.227-235, abr.-jun. 2008
ROCHA, R. B.; ROCHA, M. G. B.; ROCHA, D.; TORRES, D.; NOVAES, R. M. L.; Teste de procedência e progênies de Angico Vermelho (Anadenanthera peregrina (L.) Speg) visando o estabelecimento de pomar de sementes MG.BIOTA, Belo Horizonte, v.2, n.4, out./nov. 2009
SOUZA, S. G. A.; VARELA, V. P. Tratamentos pré-germinativos em sementes de faveira-orelha-de-macaco (Enterolobium schomburgkii Benth.). Acta Amazonica,

∫ntegrada, v. V, n. II NOVEMBRO, 2018
39
19:p 19-26, 1989.
TSAKALDIMI, M.; GANATSAS, P.; JACOBS, D. F. Prediction of planted seedling survival of five Mediterranean species based on initial seedling morphology. New Forests. 2013.
VIEIRA, R. F. Estratégia para Conservação e Manejo de Recursos Genéticos de Plantas Medicinais e Aromáticas: Resultado da 1ª Reunião técnica Brasília: Embrapa Recursos Genéticos e Biotecnologia/Instituto Brasileiro do Meio Ambiente e dos Recursos Naturais Renováveis (IBAMA)/ Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), 2002.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
40
CAPÍTULO II Resumos

∫ntegrada, v. V, n. II NOVEMBRO, 2018
41
A ARTE CIRCENSE COMO LINGUAGEM LÚDICA DA CULTURA E DO MOVIMENTO NA EDUCAÇÃO INFANTIL
Alessandra Salvador Costa Morijo ¹
Fabiana Hortolani Sartori ¹
Geisa Elaine Macedo Machado ¹
Josilaine Ap. Pianoschi Malmonge ²
Maria do Carmo Monteiro Kobayashi ²
Marise Borges Locci ¹
Sintia Otuka Rossi ²
Valdenice Vitor Ribeiro ¹
¹ EEI Angélica Leite de Freitas e-mail para contato: [email protected] ² Faculdade de Ciências - UNESP/ Bauru
RESUMO: O movimento e a corporeidade são elementos muito presentes na Educação Infantil. As crianças pequenas utilizam o corpo e todos os seus sentidos para expressar-se, aprender e desenvolver-se. A Base Nacional Comum Curricular (Brasil 2017, p.39) descreve que “as crianças conhecem e reconhecem as sensações e funções de seu corpo e, com seus gestos e movimentos, identificam suas potencialidades e seus limites[…] a instituição escolar precisa promover oportunidades ricas para que as crianças possam, sempre animadas pelo espírito lúdico e na interação com seus pares, explorar e vivenciar um amplo repertório de movimentos, gestos, olhares, sons e mímicas com o corpo, para descobrir variados modos de ocupação e uso do espaço com o corpo (tais como sentar com apoio, rastejar, engatinhar, escorregar, caminhar apoiando-se em berços, mesas e cordas, saltar, escalar, equilibrar-se, correr, dar cambalhotas, alongar-se, etc).” Nesse sentido o presente trabalho “A Arte Circense como Linguagem Lúdica da Cultura e do Movimento na Educação Infantil” tem como objetivo apresentar a riqueza do tema circo como possibilidade de ampliar o repertório cultural das crianças e desenvolver habilidades corporais por meio das manifestações artísticas do circo. O projeto foi desenvolvido na Escola de Educação Infantil Angélica Leite de Freitas, no Distrito de Tibiriçá. A escolha do tema foi motivada pela chegada de uma companhia circense no distrito. As crianças se encantaram com os personagens, brincadeiras, apresentações e toda diversão e ludicidade que o circo proporciona. O objetivo do projeto foi o de trabalhar o movimento e o corpo, de forma lúdica e divertida, promovendo a aquisição e ampliação de habilidades e destrezas na primeira infância. Os procedimentos aplicados foram fundamentados nos espetáculos circenses como: trapezismo, malabarismo, acrobacias, equilibrismo, contorcionismo, dança e demais movimentos e arte. Foram utilizados também, corda, bambolês, cadeiras, bolas e outros elementos empregados na cultura do circo. As atividades circenses introduzidas nas aulas de Movimento na educação infantil trouxeram como resultados a aprendizagem e o desenvolvimento integral das crianças, nos aspectos
∫ntegrada, v. V, n. II NOVEMBRO, 2018
42
artísticos, sociais, culturais e cognitivo, proporcionando a melhora na coordenação motora fina e global, ampliação da noção espaço-temporal,melhoria do equilíbrio corpóreo e da concentração, o desenvolvimento da autonomia e a superação do individualismo. Para além disso, proporcionou muita diversão, interações e alegria.
Palavras-chave: Arte circense. Criança. Movimento.
REFERÊNCIAS
BRASIL. Base Nacional Curricular. Disponível em:
http://basenacionalcomum.mec.gov.br/abase/. Acesso em 30.08.2018.

∫ntegrada, v. V, n. II NOVEMBRO, 2018
43
AS LUTAS E A MOTIVAÇÃO DOS ALUNOS NA EDUCAÇÃO FÍSICA
Octávio Valbueno Baptista ¹
Catia Silvana da Costa ²
¹ Colégio São Lucas ²SEE-SP/FACOL/UNESP
RESUMO: Presentes no contexto da Educação Física, as Lutas, considerada um conteúdo clássico, adentraram o ambiente escolar por volta dos anos de 1990 (ALMEIDA, 2012). Em contraposição, Ferreira (2006) menciona preconceitos de alunos, docentes e, até mesmo, de pais sobre o ensino desse conteúdo, apesar dos inúmeros benefícios já pontuados. Esse preconceito pode estar relacionado a uma cultura de Educação Física fundamentada, segundo Betti (2001), apenas em esportes midiáticos (esportes coletivos com uso de bola, como o Futebol, Basquetebol, Voleibol e Handebol) presentes nos anos finais do Ensino Fundamental de um colégio da rede privada na cidade de Jaú, no interior do Estado de São Paulo, nível de ensino e local nos quais esta pesquisa foi realizada. Assim, foi possível perceber, que de fato há preconceito por parte dos alunos, além de relacionarem o conteúdo Lutas com violência física. A presente pesquisa, de natureza qualitativa (BOGDAN; BIKLEN, 1994), teve por finalidade contribuir para desmistificar preconceitos com recursos e estratégias educacionais que proporcionassem motivação nas aulas de Educação Física de um 6º. Ano do Ensino Fundamental, mediante um Plano de Intervenção, o qual constituiu-se em “[...] uma forma de investigação-ação que utiliza técnicas de pesquisa consagradas para informar a ação que se decide tomar para melhorar a prática” (TRIPP, 2005, p. 447). Essa intervenção, composta por uma sequência de oito aulas, foi planejada e desenvolvida, uma vez por semana, pelo autor principal deste trabalho. Os dados foram coletados por meio de diários de aula em virtude de sua importância, conforme destacam Zabalza (1994) e Reali e Reyes (2009). A sequência de aulas foi a mais variada possível para tentar despertar o desejo de aprender nos alunos. Para compreender a falta de motivação dos alunos, o conteúdo Lutas e seus benefícios foram estudados, e procedimentos foram desenvolvidos de acordo com a turma escolhida para abordar o tema de modo que, ao mesmo tempo em que os alunos se interessassem em aprender, pudessem aprender com qualidade e divertimento. Chicati (2000) afirma que, quando o professor de Educação Física domina o conteúdo que desenvolve com seus alunos, faz com que os mesmos se interessem e a aprendizagem se torne mais fácil. Logo, a motivação está, de certa forma, ligada ao interesse (CHICATI, 2000). Assim, entende-se que o professor deve sempre investir na qualidade do ensino, com proposição de atividades inovadoras e de interesse dos alunos, mediante uma postura amigável em relação aos mesmos (MARTINS JR, 2008). Dentre os dados coletados, foi possível observar o desenvolvimento de aulas dinâmicas e interativas, nas quais os alunos se posicionaram como protagonistas, aprendendo e ensinando ao mesmo tempo, além da identificação de aspectos positivos e negativos. Assim, os resultados indicaram que a natureza dessas aulas promoveu a motivação e a participação dos alunos, o que contribuiu para a aprendizagem dos mesmos. Embora alguns alunos demonstraram não estarem acostumados com conteúdos “novos” nas aulas, foi

∫ntegrada, v. V, n. II NOVEMBRO, 2018
44
possível notar um processo de adaptação à abordagem das Lutas, com desenvolvimento (gradativo) de um sentimento de afeição pelo assunto, bem como uma participação ativa nas atividades propostas e desenvolvidas, tanto em formato de diálogos quanto em formato de vivências. A abordagem desse conteúdo, de forma motivacional, contribuiu para que a intervenção apresentasse mais elementos positivos do que negativos. Um dos elementos positivos está representado na intensa participação dos alunos nas aulas e na consequente aprendizagem do conteúdo. Portanto, concluiu-se que esses resultados podem contribuir para, não somente a atuação de futuros professores de Educação Física, mas, também, para a continuidade de reflexões sobre o ensino do conteúdo Lutas no Ensino Fundamental. Palavras-chave: Lutas. Educação Física Escolar. Motivação. Contatos: [email protected] [email protected]
∫ntegrada, v. V, n. II NOVEMBRO, 2018
45
BRINCADEIRAS ANTIGAS: ‘’NO RITMO DA CORDA’’
Silvana Mota Santos ¹
Ana Beatriz Cardoso Domingues ¹
¹ ISEOL - Lençóis Paulista
RESUMO: A maioria das sociedades reconhecem o brincar como parte fundamental da infância. De acordo com Kishimoto (1993), os jogos e brincadeiras tradicionais e populares são um elo entre a “cultura” e a “criança”, sendo a modalidade “jogo tradicional infantil” caracterizada pelo anonimato, tradicionalidade, transmissão oral, conservação, mudança e universalidade. Brougére (1997) aponta que a brincadeira pressupõe uma aprendizagem social. A partir dela se aprende as formas, o vocabulário típico, as regras, as habilidades específicas para cada brinquedo, tipos de interações necessárias, etc. O ato de pular corda é umas das brincadeiras tradicionais e populares muito verificados nas ruas, recreios escolares e, também, nos conteúdos dos programas de aula, principalmente de Educação Física, na Educação Infantil e no Ensino Fundamental. Apesar de parecer uma tarefa simples que desde criança aprendemos com facilidade, pular corda envolve muito mais que o simples saltar a corda. Envolve o “entrar” na corda, o girar, colocar as mãos no chão, saltar com um pé só, o “sair” da corda entre outras. Assim, podemos afirmar que o “conjunto” pular corda, além de desenvolver e exigir a coordenação de membros inferiores, agilidade, ritmo, velocidade de membros e resistência muscular, o executante deve adequar sua ação motora ao evento externo (corda). Nesse sentido o presente trabalho tem como finalidade apresentar trabalho “No ritmo da Corda”, desenvolvido no Centro de Convivência Therezinha Ribeiro Ramos no município de Lençóis Paulista com 60 crianças com idades entre 6 e 7 anos. O objetivo do projeto foi desenvolver os movimentos básicos saltar e pular e suas relações com o ritmo. Para isso foi elaborada sequência pedagógica com movimentos e atividades de expressão corporal, considerando as potencialidades dos alunos. Para iniciar a conversa sobre ritmo, foi realizada atividade utilizando o instrumento “estetoscópio” na qual as crianças “escutaram” seu próprio coração e dos colegas, observando o ritmo de cada um e, em roda de conversa, reconheceram que tal habilidade é fundamental para nossa vida e para nossa atividade “pular corda”. Com essas informações as crianças foram levadas ao pátio onde foi proposto bater palmas imitando as batidas do coração e, posteriormente, saltar nesse mesmo ritmo. Ao apresentar o material “corda”, foi proposto que as crianças pulassem no ritmo da palma/coração, sem e com contagem. Aumentando a complexidade das atividades, foi proposto colocar músicas tradicionais de “Pular corda”, proporcionando, além do desenvolvimento das habilidades físicas, aprendizado de músicas populares transmitidas oralmente. Como resultado, vimos que as atividades propostas puderam ampliar o repertório motor das crianças, auxiliaram no desenvolvimento de suas potencialidades, coordenação motora e ritmo, promoveram sentimento de autosuperação, e, por ser vivenciada em grandes grupos, sem finalidade competitiva, trouxe um momento de grande diversão. Concluímos, então, que pular corda pode ser mais que uma brincadeira tradicional, pode ser uma grande oportunidade de desenvolvimento bio-psico-social das crianças e, quando uma sequência pedagógica é proposta, o aprendizado pode se
∫ntegrada, v. V, n. II NOVEMBRO, 2018
46
tornar mais fácil e motivante. Palavras-chave: Brincadeiras tradicionais. Pular corda. Referências:
BROUGÉRE, G. Brinquedo e cultura. São Paulo: Cortez, 1997.
KISHIMOTO, T. M. Jogos tradicionais infantis: O jogo, a criança e a educação. Petrópolis: Vozes, 1993. contato: [email protected]
∫ntegrada, v. V, n. II NOVEMBRO, 2018
47
COMPARAÇÃO ENTRE TREINAMENTO INTERVALADO DE ALTA INTENSIDADE E TREINAMENTO CONTINUO DE MODERADA INTENSIDADE NA CAPACIDADE FUNCIONAL E VARIÁVEIS
HEMODINÁMICAS EM IDOSOS.
Vanessa Teixeira do Amaral ¹
Gabriel de Souza Zanini ¹ ²
¹Unesp – Bauru ²FACOL - Lençóis Paulista
RESUMO: O mundo está em franco processo de envelhecimento, tendo já atravessado as etapas iniciais dessa transição epidemiológica, estima-se que a população idosa atinja a faixa de 1,9 bilhões de pessoas nos próximos 30 anos, o que por sua vez equivalerá a cerca de um quinto da população mundial atual (Neto et al. 2018). O envelhecimento traz consigo inúmeras alterações estruturais, funcionais e metabólicas, mesmo na ausência de qualquer doença perceptível, levando muitas vezes a diminuir a capacidade de trabalho e impactando a vida cotidiana, contribuindo dessa forma para uma redução da qualidade de vida, além de aumentar a incidência e progressão de doenças crônicas (Ciolac et al. 2002; Ciolac et al 2014; Auyong et al. 2016). Aplicações de exercícios físicos a esses indivíduos pode reduzir o risco do desenvolvimento de doenças crônicas e melhorar a capacidade física, impactando por sua vez a qualidade de vida. Entretanto, os efeitos do treinamento intervalado de alta intensidade nas variáveis hemodinâmicas e de capacidade funcional ainda é um campo a ser investigado. De qualquer modo observa-se que o treinamento intervalado de alta intensidade traz consigo outras questões de suma importância, como a possibilidade de ser realizado de forma mais rápida que o treinamento continuo, o que por sua vez pode ser um diferencial dado a rotina na qual os indivíduos estão inseridos. Outros estudos sugerem que meia hora de treinamento intervalado tem o mesmo resultado que 1 hora de treinamento continuo, sendo assim, esta pode ser uma estratégia facilitadora para se criar uma rotina de exercícios. Desta forma o presente estudo tem como objetivo avaliar o treinamento intervalado de alta intensidade versus o treinamento continuo de moderada intensidade nas capacidades funcionais e hemodinâmicas de indivíduos idosos. Para tanto foram avaliadas 58 idosas sedentárias submetidas ao treinamento de alta intensidade (TI) (n=28) e ao treinamento continuo (TC) (n=30) e tiveram as variáveis hemodinâmicas – frequência cardíaca (FC) e pressão arterial (PA) – avaliadas, bem como as capacidades funcionais obtidas pelos testes: sentar e levantar; Timed Up & GGO (TUG); força de preensão palmar; sentar e alcançar (Wells & Dillon). Foram realizadas avaliações pré e pós após 12 semanas de treinamento. As sessões de TI foram compostas de 2 min. de caminhada moderada intensidade alternando com 1 minuto de caminhada/corrida de alta intensidade durante 15 minutos, mediante a percepção subjetiva de esforço para o treinamento; as sessões de TC foram realizadas com 20 minutos de caminhada de moderada intensidade. Nos dois protocolos, TI e TC, foram incluídos treinos resistidos. Os resultados por sua vez demonstraram que não houve diferenças significativas nos valores de PAS e PAD, todavia houve redução na média tanto da PAS quanto na PAD dos participantes de TI após 12 semanas. A frequência cardíaca demonstrou

∫ntegrada, v. V, n. II NOVEMBRO, 2018
48
melhora no grupo de TI enquanto os resultados de TC não sugerem resultados significativos para esta variável. Também não houve diferença significativa nos resultados de TUG, pois é provável que em apenas 12 semanas de intervenção não seja suficiente para melhorar a capacidade de agilidade dos pacientes. O teste de sentar e levantar demonstrou melhora tanto para TC quanto para TI, no teste de preensão palmar foi observado uma melhora em ambos os grupos, da mesma forma como a flexibilidade também demonstrou melhora significativa após as 12 semanas de intervenção. Desta forma os resultados sugerem que o TI pode ter melhores implicações clinicas nas capacidade hemodinâmicas e funcionais em idosos. Entretanto novos estudos vem sendo realizados com um período maior para verificar as implicações de uma periodização maior que 12 semanas.
Referencias AUYOUNG, M. et al., Integrating physical activity in primary care practice. The American Journal of Medicine, v. 129, n. 10, p. 1022–1029, 2016. ISSN 0002-9343 CIOLAC, E. A. G., GV. The role of resistance training on ageing. Rev. Soc. Cardiol, Estado de São Paulo, v. 12, . 5–26, 2002.
∫ntegrada, v. V, n. II NOVEMBRO, 2018
49
AS PERSPECTIVAS DE GRANDUANDOS(AS) SOBRE A DISCUSSÃO DAS TEMÁTICAS GÊNERO E SEXUALIDADE DURANTE A FORMAÇÃO
INICIAL
Camila Midori Takemoto Vasconcelos ¹
Lílian Aparecida Ferreira ¹
¹UNESP - Bauru
RESUMO: Reconhecer o(a) professor(a) de Educação Física e a sua área de atuação envolve, necessariamente, sua responsabilidade pela formação dos(as) cidadãos(ãs) no que diz respeito à transmissão e transformação dos saberes sociais historicamente produzidos. Em tal perspectiva, o debate sobre as temáticas gênero e sexualidade é fundamental, podendo contribuir com uma configuração que supere os estereótipos e preconceitos existentes. Nessa defesa do ensino problematizador do gênero e sexualidade pelos(as) professores(as) de Educação Física, entendemos que a formação inicial, concebida aqui como sendo a graduação no ensino superior, necessita desenvolver tal assunto junto aos(as) futuros(as) professores(as). Neste sentido, os objetivos deste estudo foram identificar e analisar as perspectivas de graduandos(as) sobre as discussões de gênero e sexualidade durante a sua formação inicial. O estudo se caracterizou pela pesquisa exploratória, envolvendo como técnica de coleta a entrevista semiestruturada. Participaram da investigação doze graduandos(as) do curso de Licenciatura em Educação Física. Para este texto, o recorte da pesquisa envolveu a seguinte questão: Você acha que durante o curso de licenciatura em Educação Física, as discussões sobre as relações de gênero e sexualidade tem sido suficientes para sua formação? Por que?. Os resultados obtidos mostraram que as temáticas ainda são muito pouco abordadas durante a formação inicial e que, quando feitas, são realizadas de forma não planejada, descontínua e não esclarecedora. Fazendo com que os(as) alunos(as) não se sintam preparados(as) para atuar durante sua prática profissional. O ensino superior é um dos principais responsáveis pela formação do(a) futuro(a) professor(a), então é mais do que essencial que essas temáticas sejam muito bem abordadas e esclarecidas a esses(as) alunos(as) para que durante a sua prática profissional, a Educação Física, possa contribuir para uma configuração que supere os estereótipos e preconceitos existentes, possibilitando que os(as) alunos(as) possam viver diferentes experiências, seja com diferentes pessoas e diversas atividades. Por isso, faz-se necessário que os(as) professores(as) estejam preparados(as) para desenvolver tais discussões durante suas aulas, considerando-os sempre como uma referência importante no papel de desconstrução de conceitos difundidos na sociedade e vistos como naturais, e não podendo deixar de considerar também a necessidade de se formar professores (as) capacitados(as) para discutir sobre tais temáticas. Palavras-chave: Gênero. Sexualidade. Formação inicial. Educação Física. Contato: [email protected]





















![Análise sobre a instalação do Dispositivo Seccionamento ...§ão_do_Dispositivo_de... · Figura 4: CELESC - Diagrama Esquemático do Padrão de Entrada [6, página 18] O diagrama](https://img.document.onl/doc/110x75/5c4b3fb693f3c3117d7294f0/analise-sobre-a-instalacao-do-dispositivo-seccionamento-aododispositivode.jpg)







