Embed Size (px)
Citation preview

José Luís Martins Rodrigues
Conceção de um banco deensaios para o conjunto motor / hélice
José
Luí
s M
artin
s Ro
drigu
es
outubro de 2011UMin
ho |
201
1C
once
ção
de u
m b
anco
de
ensa
ios
para
o c
onju
nto
mot
or /
hél
ice
Universidade do MinhoEscola de Engenharia

outubro de 2011
Dissertação de Mestrado
Ciclo de Estudos Integrados Conducentes aoGrau de Mestre em Engenharia Eletrónica Industrial e Computadores
Trabalho efetuado sob a orientação daProfessora Doutora Filomena Soares
Co-OrientadoresProfessor Doutor Luís Ferreira SilvaProfessor Doutor Pedro Lobarinhas
José Luís Martins Rodrigues
Conceção de um banco deensaios para o conjunto motor / hélice
Universidade do MinhoEscola de Engenharia

Agradecimentos
Durante a realização deste trabalho, várias foram as pessoas que auxiliaram e me
seguiram durante a elaboração desta dissertação. A todos expresso os meus
agradecimentos, não deixando de destacar algumas pessoas.
Quero reconhecer os vários professores que fizeram parte da minha
aprendizagem académica, em particular a minha orientadora e co-orientadores de tese
de mestrado, Doutora Filomena Soares, Doutor Luís Ferreira Silva e Doutor Pedro
Lobarinhas, que sempre acreditaram no meu valor, a eles o meu sincero obrigado.
Aproveito para presentear esta tese de mestrado aos meus amigos me
acompanharam ao longo do curso, considero-os a minha segunda família. Foi com eles
que vivi uma fase marcante da minha vida, por isso não vos esquecerei, Gabriel, Joca,
Vítor, Marcos, Filipa, Nuno, Sandra, Ricardo, Marco, Cidália e Mauro.
Agradeço com mais sentimento à minha amiga e namorada Raquel, ela aliou a
minha vontade à sua, impelindo-me à conclusão do curso. A sua compreensão, carinho,
a teimosia e o apoio dos seus familiares foram contributos importantes nesta caminhada
final, estarão sempre no meu pensamento.
Os últimos são os primeiros e não podia deixar de retribuir a minha família todo
o meu agradecimento, pais e irmãos que durante a minha vida estiveram a meu lado nos
bons e nos difíceis maus momentos.

ii

iii
Resumo
Pretende-se, com o presente trabalho, desenvolver, construir, implementar e
testar, a partir de uma série de outros trabalhos anteriores, um banco de ensaios para
testar conjuntos motor / hélice utilizados em aeromodelos. O banco de ensaios deverá
permitir o estudo do comportamento de motores elétricos de aeromodelos quando
acoplados com diferentes hélices propulsoras.
A unidade a construir deverá permitir a medição dos seguintes parâmetros:
velocidade de rotação, binário, tração e potência consumida (tensão e intensidade de
corrente na alimentação). É desejável que todos os parâmetros sejam lidos de forma
automática através de uma placa de aquisição, que servirá de veículo de transmissão
para uma interface gráfica desenvolvida em LabVIEW ou noutro software semelhante
que possibilitará a visualização em tempo real do ensaio e armazenamento dos dados
recolhidos.
Este desenvolvimento deverá ter ainda em consideração a facilidade e segurança
de operação do banco de ensaios, tendo presente que é desejável que o mesmo seja
operado apenas por uma única pessoa.
Assim para equipar o banco de ensaios para o conjunto motor / hélice, foi
adquirido uma célula de carga capaz de realizar medições da tração e binário no mesmo
eixo, foi utilizado um sensor de infravermelhos para obter a velocidade, foi construído
uma placa de circuito em bread board para albergar o amplificador de instrumentação e
foi comprado um sensor de corrente e um microcontrolador, que foi usado como placa
de aquisição de dados.
Foi implementado um código com as funções a realizar pelo microcontrolador e
um programa realizado em LabVIEW que permite a manipulação, armazenamento e
visualização dos dados adquiridos em tempo real.
Por último foram realizados testes de calibração da célula de carga com massas
aferidas para o parâmetro tração, estes testes serviram para obter a reta de calibração
deste parâmetro.

iv

v
Abstract
The present research is intended to develop, build, implement and test, from
other previous works, a test bench to test sets of engine / propellers used in model
airplanes. The test bench should allow the behavior study of electric motors for model
airplanes when coupled with different propellers.
The built drive must permit the measurement of the following parameters:
rotational speed, generated torque, traction and power consumption (voltage and current
strength in the feed). It is desirable that all parameters are automatically read by a data
acquisition board, which will work such as a transmission vehicle to a graphical
interface developed in LabVIEW or other similar software which will allow real-time
view and storage of collected data.
This development should also take into consideration the ease and safety of the
operation of the test bench, bearing in mind that it is desirable that it will be operated
only by one person.
To equip the test bench for the engine / propeller, a load cell was acquired
capable of measuring the traction and torque on same axis, a infrared sensor was used to
get the speed of the propeller, and a breadboard was built for the instrumentation
amplifier, was purchased a current sensor and a microcontroller, which was used as a
data acquisition board.
A code was implemented with functions to be performed by microcontroller and
a program produced in LabVIEW which allows the manipulation, storage and display of
acquired data in real time.
At last, tests were made for the calibration of the load cell with checked mass for
the traction parameter, these tests were used to obtain the correct calibration of this
parameter.

vi

vii
Índice AGRADECIMENTOS __________________________________________________ I
RESUMO ___________________________________________________________ III
ABSTRACT _________________________________________________________ V
ÍNDICE ___________________________________________________________ VII
ÍNDICE DE FIGURAS _______________________________________________ IX
ÍNDICE DE TABELAS _______________________________________________ XV
ÍNDICE DE GRÁFICOS ____________________________________________ XVII
LISTA DE ACRÓNIMOS ____________________________________________ XIX
SIMBOLOGIA _____________________________________________________ XXI
1 INTRODUÇÃO _____________________________________________________ 1
1.1 ENQUADRAMENTO, MOTIVAÇÃO E JUSTIFICAÇÃO DA ORIENTAÇÃO DOS TRABALHOS _________ 1
1.2 OBJETIVOS _________________________________________________________________ 2
1.3 ESTRUTURA DO RELATÓRIO ____________________________________________________ 2
2 ESTADO DA ARTE _________________________________________________ 5
2.1 PEQUENAS TURBINAS EÓLICAS __________________________________________________ 5
2.2 VEÍCULOS DE VOO AUTÓNOMOS _________________________________________________ 8
2.3 MICRO-VEÍCULOS AÉREOS ____________________________________________________ 13
2.4 DISCUSSÃO DOS SISTEMAS APRESENTADOS ________________________________________ 16
3 CARACTERIZAÇÃO DO AEROMODELO ____________________________ 19
3.1 AEROMODELOS _____________________________________________________________ 19
3.2 HÉLICES __________________________________________________________________ 20
3.2.1 DIÂMETRO DO HÉLICE ______________________________________________________ 21
3.2.2 PASSO DO HÉLICE __________________________________________________________ 22
3.2.3 DESEMPENHO DO HÉLICE ____________________________________________________ 23
3.3 MOTOR ELÉTRICO DE CORRENTE CONTÍNUA _______________________________________ 24
3.3.1 MOTORES COM ESCOVAS ____________________________________________________ 26
3.3.2 MOTORES SEM ESCOVAS ____________________________________________________ 27
3.4 CONTROLADOR ELETRÓNICO DE VELOCIDADE _____________________________________ 29
3.5 BATERIAS _________________________________________________________________ 30
4 MÉTODO EXPERIMENTAL ________________________________________ 33

viii
4.1 DESENVOLVIMENTO DO BANCO DE ENSAIOS _______________________________________ 33
4.1.1 DESCRIÇÃO DO BANCO DE ENSAIO PARA O CONJUNTO PROPULSOR ____________________ 33
4.1.2 FIXAÇÃO DO CONJUNTO MOTOR / HÉLICE ________________________________________ 33
4.1.3 SISTEMA DE MEDIÇÃO E MONITORIZAÇÃO _______________________________________ 35
4.2 SISTEMA DE AQUISIÇÃO DE DADOS ______________________________________________ 36
4.2.1 LEITURA DA TENSÃO _______________________________________________________ 36
4.2.2 LEITURA DA CORRENTE _____________________________________________________ 37
4.2.3 LEITURA DA VELOCIDADE ___________________________________________________ 38
4.2.4 LEITURA DA TRAÇÃO E DO BINÁRIO ___________________________________________ 39
4.3 MÓDULO DE AQUISIÇÃO DE DADOS ______________________________________________ 43
4.4 SISTEMA DE MONITORIZAÇÃO DOS DADOS ________________________________________ 45
5 DESENVOLVIMENTO E IMPLEMENTAÇÃO DO BANCO DE ENSAIOS 49
5.1 ESQUEMÁTICO GERAL DE LIGAÇÃO ______________________________________________ 49
5.2 MEDIÇÃO DOS PARÂMETROS ___________________________________________________ 50
5.3 CONFIGURAÇÕES DO µC ______________________________________________________ 52
5.4 CONFIGURAÇÕES DO LABVIEW ________________________________________________ 55
5.5 SUMÁRIO DOS DESENVOLVIMENTOS _____________________________________________ 60
6 ANÁLISE E DISCUSSÃO DOS RESULTADOS ________________________ 61
6.1 TESTES DE CALIBRAÇÃO DA CÉLULA DE CARGA REALIZADOS PELA FUTEKTM _____________ 61
6.2 TESTES REALIZADOS À CÉLULA DE CARGA, COMPONENTE COMPRESSÃO _________________ 65
6.2.1 RESUMO DOS TESTES OBSERVADOS NO MULTÍMETRO ______________________________ 68
6.2.2 VISUALIZAÇÃO DOS TESTES EM LABVIEW ______________________________________ 69
6.3 TESTES REALIZADOS À CÉLULA DE CARGA, COMPONENTE TRAÇÃO ______________________ 74
7 CONCLUSÃO _____________________________________________________ 77
7.1 SUMÁRIO __________________________________________________________________ 77
7.2 CONCLUSÕES ______________________________________________________________ 77
7.3 TRABALHOS FUTUROS ________________________________________________________ 78
8 BIBLIOGRAFIA ___________________________________________________ 79
8.1 BIBLIOGRAFIA CITADA _______________________________________________________ 79
8.2 OUTRA BIBLIOGRAFIA ________________________________________________________ 79
8.3 WEB GRAFIA _______________________________________________________________ 80
ANEXO A ____________________________________________________________ I
ANEXO B _________________________________________________________ VII
ANEXO C __________________________________________________________ IX
ix
Índice de figuras
Fig. 1 - Túnel de vento: 1 - câmara de teste; 2 - motor; 3 - ventilador; 4 - painel
de alta tensão; 5 - posto de observação; 6 - posto de controlo do motor; 7 - rede; 8 -
local do teste, adaptado de [1] ____________________________________________ 6
Fig. 2 - Características da plataforma experimental, adaptado de [1] _________ 6
Fig. 3 - Esquemático posicional do conjunto gerador / hélice, sensores e
aquisição de dados, adaptado de [1]. _______________________________________ 7
Fig. 4 - Esquema global do sistema: 1 - conversor de frequência; 2 - motor de
indução trifásico; 3 - caixa de velocidades; 4 - simulador do hélice; 5 - sensor de
binário; 6 - gerador síncrono de ímanes permanentes; 7 - termopar de temperatura;8 –
retificador de fase; 9 – inversor de fase; 10 – transdutor de tensão resistivo; 11 – placa
de aquisição; 12 – transdutor de corrente; 13 – computador de processamento de dados;
14 – sensor de velocidade; R,S,T – fase de corrente elétrica; N – neutro de corrente
elétrica [2] ____________________________________________________________ 8
Fig. 5 - (a)Túnel de vento subsónico, adaptado de (b) fotografia da secção de
teste [3] ______________________________________________________________ 9
Fig. 6 - Localização da célula de carga para medição da tração: Q – binário; T –
tração, adaptado de [3] __________________________________________________ 9
Fig. 7 - Localização da célula de carga para medição do binário, adaptado de [3]
___________________________________________________________________ 10
Fig. 8 - Fotorrefletor apontado para o veio do motor [8] _________________ 10
Fig. 9 - Sinal representativo do sensor de velocidade do hélice [3] _________ 11
Fig. 10 - Vista esquemática do trabalho conduzido por Merchant, adaptado de [4]
___________________________________________________________________ 12
Fig. 11 - Calibração da célula de carga de dois eixos [4] _________________ 13
Fig. 12 - Medição da tração e esquemático da montagem, adaptado de [6] ___ 15

x
Fig. 13 - Medição do binário e esquemático da montagem, adaptado de [6] __ 15
Fig. 14 - Esquemático do equipamento experimental de teste, adaptado de [7]. 16
Fig. 15 - Forças fundamentais que atuam num avião em regime de voo, adaptado
de [8] _______________________________________________________________ 19
Fig. 16 - Constituição de uma lâmina: 1 – bordo de ataque; 2 – bordo de fuga; 3
– perfil; 4 – bordo marginal, adaptado de [10] _______________________________ 20
Fig. 17 – a) Caracterização do diâmetro de um hélice: D – diâmetro; b)
Caracterização do passo: h – altura; x – largura; adaptado de [11] _______________ 21
Fig. 18 - Passo de uma hélice [10] __________________________________ 22
Fig. 19 - Elaboração do passo de um hélice [10] _______________________ 23
Fig. 20 - Disposição das escovas no motor [14] ________________________ 26
Fig. 21 – Induzido de um motor [14] ________________________________ 27
Fig. 22 - Detalhe do interior do motor com escovas [14] _________________ 27
Fig. 23 - Motor "inrunner" [14] ____________________________________ 28
Fig. 24 - Motor "outrunner” [14] ___________________________________ 28
Fig. 25 - Relação entre velocidade do motor e tensão de entrada, adaptado de
[15] ________________________________________________________________ 29
Fig. 26 - Sinais de PWM com diferentes duty cycles [16] ________________ 30
Fig. 27 - Aspetos de construção de uma bateria [18] ____________________ 31
Fig. 28 - Esquema de ligação entre as várias partes mecânicas [12] ________ 34
Fig. 29 - Fixação do braço de suporte à coluna vertical [12] ______________ 34
Fig. 30 - Esquemático do ambiente laboratorial [12] ____________________ 35

xi
Fig. 31 - Divisor de tensão e sua integração no banco de ensaios: Vin – tensão de
entrada; Vout – tensão de saída; R1,R2 - resistências _________________________ 36
Fig. 32 - Sensor de corrente e sua montagem: M – ponto de medida; Is – corrente
no secundário; RM- resistência de medida [20] ______________________________ 37
Fig. 33 - Esquemático do sensor de leitura da corrente consumida, A – sensor de
corrente; M - motor____________________________________________________ 38
Fig. 34 - Emissor e recetor de infravermelhos:Vi – tensão de entrada; Vcc –
tensão coletor comum; V0 – tensão de saída [21] _____________________________ 38
Fig. 35 - Onda quadrada gerada pela leitura da velocidade [22]____________ 39
Fig. 36 - Sensor de leitura da velocidade [23] _________________________ 39
Fig. 37 - Células de carga [24] _____________________________________ 40
Fig. 38 - Ponte de Wheatstone: R1, R2, R3, R4, - resistências; VE – tensão de
entrada; VA – tensão de saída [25] ________________________________________ 40
Fig. 39 - Célula de carga selecionada FUTEKTM [26] ___________________ 41
Fig. 40 - Amplificador de Instrumentação: V0 – tensão de saída; VS1,VS2, tensão
de entrada; R1 – resistência de ganho (potenciómetro); R2,R3,R4,R5,R6 – resistências ,
adaptado de [27] ______________________________________________________ 42
Fig. 41 - Versão esquemática simplificada do INA114: VIN‐ - tensão de entrada
negativa; VIN - tensão de entrada positiva; Ref – referência; V0 – tensão de saída [28]
___________________________________________________________________ 43
Fig. 42 - Kit USBKey da Atmel AT90USB1287 [29] ___________________ 44
Fig. 43 - Ferramenta de programação AVR Studio 4 da Atmel ____________ 45
Fig. 44 - Programação gráfica ______________________________________ 46
Fig. 45 - Ambiente de trabalho Front Panel ___________________________ 47
Fig. 46 - Ambiente de trabalho do Block Diagram ______________________ 47

xii
Fig. 47 - Esquemático geral de ligação: 1 – sensor de velocidade; 2 – célula de
carga; 3 – sensor de tensão; 4 – sensor de corrente; 5 – microcontrolador; 6 –
computador de visualização do ensaio _____________________________________ 49
Fig. 48 - Integração dos sensores de leitura da tensão e corrente com o µC:
ADC3,ADC4 – conversor analógico digital 3 e 4 ____________________________ 50
Fig. 49 - Integração do recetor de velocidade com o µC: Vcc – tensão coletor
comum; INT0 – interrupção externa 0, adaptado de [21] _______________________ 50
Fig. 50 - Esquemático amplificador de instrumentação: ADC0, ADC1 –
conversor analógico digital 1 e 2; IC1,IC2 – circuito integrado 1 e 2; R3,R4 –
resistência; R1,R2 – potenciómetro; V+, V- - entradas de tensão; _______________ 51
Fig. 51 - Montagem em placa breadboard do amplificador de instrumentação 51
Fig. 52 - Fluxograma do programa implementado no µC _________________ 54
Fig. 53 - Placa de expansão do µC __________________________________ 54
Fig. 54 - Configuração da porta série no LabVIEW _____________________ 55
Fig. 55 - Escrita e leitura na porta série pelo LabVIEW __________________ 56
Fig. 56 - Leitura e manipulação dos bytes recebidos na porta série. ________ 57
Fig. 57 – Código para armazenamento dos dados em formato Excel ________ 57
Fig. 58 - Rosto do programa desenvolvido em LabVIEW ________________ 58
Fig. 59 - Janela de monitorização dos dados ___________________________ 59
Fig. 60 - Janela de verificação do programa desenvolvido em LabVIEW ____ 59
Fig. 61 - Massas utilizados nos testes ________________________________ 65
Fig. 62 - Teste com massa de 0,05 kg ________________________________ 66
Fig. 63 - Conversão dos dados para valores de tensão no LabVIEW: tensão offset
– tensão lida pela célula de carga em vazio. _________________________________ 69

xiii
Fig. 64 - Programação para o cálculo da tensão offset ___________________ 70
Fig. 65 - Valor monitorizado para uma carga de 0,05Kg _________________ 71
Fig. 66 - Erro de quantização [32]___________________________________ 74

xiv

xv
Índice de tabelas
Tabela 1 - Lista de sensores usados e parâmetros a medir – parte 1 [6] ______ 13
Tabela 2 - Lista de sensores usados e parâmetros a medir – parte 2 [6] ______ 14
Tabela 3 - Calibração da célula de carga - Tração ______________________ 62
Tabela 4 - Calibração da célula de carga - Compressão __________________ 62
Tabela 5 - Calibração da célula de carga – binário no sentido dos ponteiros do
relógio ______________________________________________________________ 63
Tabela 6 - Calibração da célula de carga - binário no sentido contrário dos
ponteiros do relógio ___________________________________________________ 64
Tabela 7 - Resultado do teste monitorizado no multímetro para 0,05 kg _____ 66
Tabela 8 - Resultado do teste monitorizado no multímetro para 0,1 kg ______ 67
Tabela 9 - Resultado do teste monitorizado no multímetro para 0,2 kg ______ 67
Tabela 10 - Resultado do teste monitorizado no multímetro para 0,5 kg _____ 67
Tabela 11 - Resultado do teste monitorizado no multímetro para 1 kg ______ 68
Tabela 12 - Sumário dos testes monitorizados no multímetro _____________ 68
Tabela 13 - Resultados obtidos em LabVIEW para uma massa de 0,05 kg ___ 71
Tabela 14 - Resultados obtidos em LabVIEW para uma massa de 0,1 kg ____ 71
Tabela 15 - Resultados obtidos em LabVIEW para uma massa de 0,2 kg ____ 72
Tabela 16 - Resultados obtidos em LabVIEW para uma massa de 0,5 kg ____ 72
Tabela 17 - Resultados obtidos em LabVIEW para uma massa de 1 kg _____ 72
Tabela 18 - Dados teóricos vs dados práticos vs dados monitorizados em
LabVIEW, componente compressão ______________________________________ 72

xvi
Tabela 19 - Resultado obtido em LabVIEW para uma carga de 0,05 kg _____ 75
Tabela 20 - Resultado obtido em LabVIEW para uma carga de 0,1 kg ______ 75
Tabela 21 - Resultado obtido em LabVIEW para uma massa de 0,5 kg______ 75
Tabela 22 - Resultado obtido em LabVIEW para uma massa de 1 kg _______ 76
Tabela 23 - Dados teóricos vs dados práticos vs dados monitorizados em
LabVIEW, componente tração ___________________________________________ 76

xvii
Índice de gráficos
Gráfico 1 - Calibração da Tração ___________________________________ 62
Gráfico 2 - Calibração da Compressão _______________________________ 63
Gráfico 3 - Calibração do binário - sentido dos ponteiros do relógio ________ 64
Gráfico 4 - Calibração do binário - sentido contrário dos ponteiros do relógio 64
Gráfico 5 - Tensão de saída teórica vs Tensão de saída prática monitorizada no
multimetro __________________________________________________________ 68
Gráfico 6 - Comparação entre dados teóricos com dados práticos e dados
monitorizados em LabVIEW, para a componente compressão __________________ 73
Gráfico 7 - Comparação entre dados teóricos com dados práticos e dados
monitorizados em LabVIEW, para a componente tração _______________________ 76

xviii

xix
Lista de acrónimos
A2D Analogic to Digital
AC Alternating Current
ADC Analog-to-Digital Converter
A.I. Amplificador de Instrumentação
DC Direct Current
DEI Departamento de Engenharia Eletrónica
DEM Departamento de Engenharia Mecânica
FS Full Scale
INT0 Interrupção externa 0
IC1, IC2 Circuito Integrado 1 e 2
kgf Quilograma força
lb Libra, (1 lb = 0.45359237 kg)
LED Light Emmiting Diode
LSB Least Sgnificant Bit
MSB Most Significant Bit
MAV Micro Air Vehicle
M2 Massa padrão de classe 2
M3 Massa padrão de classe 3
N.m Newton metro
PWM Pulse Width Modulation

xx
PCB Printed Circuit Board
RPM Rotações por Minuto
RTS Reaction Torque Sensor
Re Numero de Reynolds
Ref Referência
R.O. Rated Output
TM Trademark
UAV Unmanned Aerial Vehicles
USB Universal Serial Bus
VI Virtual Instruments
VRP Veículo Remotamente Pilotado
Ymsb Byte mais significativo
Ylsb Byte menos significativo
µC Microcontrolador
µP MicroProcessador

xxi
Simbologia
Símbolos Unidades
A, G Ganho do amplificador (-)
Cp Coeficiente de potência [-]
Cq Coeficiente de binário [-]
Ct Coeficiente de tração [-]
D Diâmetro [m]
Hz Hertz [Hz]
I Intensidade da corrente [A]
Ipn Corrente nominal primário [A]
Isn Corrente nominal secundário [A]
Is Corrente no secundário [A]
k kappa [1x1000]
M Ponto de medida [V]
mV miliVolt [V:1000]
m Metro [m]
n Velocidade de rotação [rpm]
P Potência [W]
Psaída Potência de saída [W]
Pentrada Potência de entrada [W]
Pjoule Perdas por efeito de joule [W]

xxii
Pmag Perdas magnéticas [W]
Pmec Perdas mecânicas [W]
Ppara Perdas parasitas [W]
Perdas Perdas gerais [W]
Pmec Potencia mecânica [W]
Q, I Binário [N.m]
R Resistência [Ω]
Rm Resistência de medida [Ω]
R1,R2,R3,R4,R5,R6 Resistência [Ω]
Rg Resistência de ganho [Ω]
T Tração [kg.m/s]
V Volt [V]
ρ Densidade volúmica [kg/m3]
U Tensão [V]
V∞ Velocidade de deslocamento [m/s]
Vout, V0, VA Tensão de saída [V]
Vin, VE, VS1, VS2 Tensão de entrada [V]
VIN‐, V- Tensão de entrada negativa [V]
VIN , V+ Tensão de entrada positiva [V]
Vmin Tensão mínima [V]
Vmax Tensão máxima [V]

xxiii
Vref Tensão de referência [V]
W Watts [W]
ω Velocidade angular [rad/s]
η Rendimento do motor [%]
µ Viscosidade dinâmica do fluido [Pa.s]

xxiv

1
1 Introdução
O conjunto motor / hélice é alvo de estudo desde os primórdios da aviação e
deste modo está bem presente no nosso dia a dia, desde a geração de energia limpa das
turbinas eólicas, transporte de cargas e pessoas através da aviação civil, aeromodelismo,
indústria naval, ate ao reconhecimento e vigia através de operações militares realizadas
por veículos aéreos não tripulados.
Encontrar o hélice que mais se adequa a um determinado tipo de motor e avião,
tem sido o propósito de vários estudos realizados em laboratórios construídos
unicamente para o efeito. Uma boa seleção do hélice e das características desta, permite
ao motor operar na gama de velocidade recomendada e não entre em regimes
prejudiciais, tanto para o motor como para todo o conjunto (hélice / motor /
aeromodelo).
O hélice correto não permite que o motor entre em excesso de velocidade e
possibilita também que o motor atinja a potencia máxima quando o hélice roda a
velocidade mais baixas.
Por estes motivos a escolha de um hélice para um motor não pode ser feita
aleatoriamente, deve-se ter em consideração as características do motor bem como as do
hélice. Esta seleção vai permitir uma melhor afinação e consequentemente um superior
desempenho do conjunto.
1.1 Enquadramento, motivação e justificação da orientação dos trabalhos
Este projeto surge em consequência de uma série de outros trabalhos que se
desenvolveram no Departamento de Engenharia Mecânica, DEM, na área da conceção,
projeto, construção e operação de modelos de aeronaves de pequena envergadura,
preparadas, quer para sistemas de voo com operação por rádio controlo, quer para
sistemas de voo autónomo.
O projeto e construção de um banco de ensaios destinado a testar e a avaliar o
desempenho de conjuntos motor / hélice para aeromodelos representa uma mais-valia

2
para os objetivos e desenvolvimentos futuros em diversos projetos que decorrem nesta
área.
Desta forma, o caráter multidisciplinar desta proposta justifica, só por si, que a
orientação dos trabalhos seja repartida pelos dois membros do DEM para os domínios
científicos do Projeto e dos Fluidos, e por um membro do Departamento de Engenharia
Eletrónica Industrial, DEI, para os domínios científicos da Eletrónica e da Automação.
1.2 Objetivos
Com a realização deste projeto pretendem-se alcançar os seguintes objetivos:
Identificação de todas as variáveis que se pretendem medir e os intervalos
espectáveis para cada uma;
Revisão do desenho base do equipamento, com identificação da lista de peças e
materiais necessários à sua construção;
Definição do(s) sistema(s) de medida, com a correta caracterização dos sensores
a utilizar, e a sua aquisição;
Avaliação das questões de segurança relacionadas com a operação do
equipamento;
Desenvolvimento de uma interface em LabVIEW (ou noutro software
semelhante) para a aquisição de dados;
Construção do protótipo;
Realização de alguns ensaios sistemáticos para teste da operacionalidade do
equipamento.
1.3 Estrutura do relatório
O relatório está dividido em seis capítulos fundamentais, o primeiro capítulo
descreve trabalho proposto, bem como a motivação e objetivos a cumprir.
O segundo capítulo está referenciado o trabalho realizado por outros autores para
a obtenção da melhor afinação do conjunto motor / hélice. No terceiro capítulo, são
apresentadas as características e forças envolvidas no conjunto propulsor, bem como
outros componentes que envolvem o conjunto.

3
No quarto capítulo é descrito o método experimental, ou seja, quais os sensores,
qual placa de aquisição e a plataforma informática de trabalho a aplicar no banco de
ensaios e a teoria adjacente. No quinto capítulo também são apresentados os resultados
obtidos da aplicação dos componentes na implementação e construção do banco.
No sexto capítulo, são realizados os testes ao banco de ensaios, testes de leitura
dos parâmetros envolvidos na caracterização do conjunto motor / hélice e tiram-se
ilações sobre os resultados obtidos. Por último, o sétimo capítulo são apresentadas as
conclusões deste projeto, quais os pontos positivos e negativos que ocorreram e o
planeamento para trabalho futuro.

4

5
2 Estado da arte
O conjunto motor / hélice bem como o conjunto gerador / hélice foram, e
continuam a ser, objeto de investigação nos vários campos de utilização e por esse
motivo existem vários estudos acerca destes conjuntos.
Neste capítulo são apresentadas algumas das diferentes aplicações atualmente
existentes sobre o conjunto motor / hélice e conjunto gerador / hélice, bem como os
meios envolvidos para a realização dos testes, a fim de encontrar a melhor relação entre
o conjunto.
Face a importância da caracterização do conjunto motor / hélice, as informações
relativas a esses ensaios não têm estado disponíveis para serem observadas pelo
exterior. Deste modo, os trabalhos apresentados seguidamente não representam a
totalidade dos ensaios conduzidos mas abrangem os campos de investigação que, neste
momento são alvo de maior atenção por parte da investigação mundial.
Assim, de seguida, irá ser apresentado o tipo de ambiente laboratorial em que se
efetuaram os estudos, ou seja, se o teste é realizado no interior de um túnel de vento
(teste dinâmico) ou se é realizado em condições de regime estacionário. O teste
dinâmico permite observar o comportamento do conjunto em regime de voo onde as
variáveis de pressão atmosférica, velocidade do vento e temperatura ambiente são
importantes para a caracterização do conjunto. No teste estacionário as variáveis
descritas anteriormente são desprezadas.
Descrevem-se também as estruturas desenvolvidas para suporte do motor e dos
sensores utilizados, aquisição de dados e por fim a visualização dos dados.
2.1 Pequenas turbinas eólicas
O trabalho desenvolvido por M. Predescu et al. [1], centrou-se no estudo de
pequenas turbinas eólicas. Para tal, utilizou duas turbinas de vento, uma de 250 W e
outra de 1 kW projetadas para o carregamento de baterias. O objetivo deste trabalho foi
determinar a curva de potência da turbina e do desempenho do conjunto

6
turbina/gerador. Os testes ao conjunto foram realizados num túnel de vento de circuito
fechado como representado no desenho esquemático, Fig. 1.
Fig. 1 - Túnel de vento: 1 - câmara de teste; 2 - motor; 3 - ventilador; 4 - painel de alta tensão; 5 - posto de observação; 6 - posto de controlo do motor; 7 - rede; 8 - local do teste, adaptado de [1]
A Fig. 2, apresenta a plataforma experimental, na qual se realizaram os testes.
Nesta plataforma todos os componentes estão dispostos numa estrutura metálica que
suporta o conjunto gerador / hélice em estudo, bem como todos os sensores necessários
para obter o máximo de dados para a caracterização do conjunto.
Fig. 2 - Características da plataforma experimental, adaptado de [1]

7
Nesta plataforma, a célula de carga responsável pela medição da grandeza
binário está em série entre o gerador elétrico e o hélice. Enquanto a célula de carga
encarregada pela medição da grandeza tração está em paralelo com os anteriores
componentes.
A velocidade do hélice obteve-se através da leitura de um sensor ótico, de referir
também que foi instalado um anemómetro na parte frontal do hélice, para que a
velocidade do vento também seja considerada
Posteriormente os sensores foram conectados à placa de acondicionamento de
sinal, Campbell 21X, que foi responsável por receber os dados num intervalo de tempo
de 30 segundos. A montagem do conjunto gerador / hélice, a disposição dos sensores no
banco de testes e manipulação de dados são descritos através da Fig. 3.
Fig. 3 - Esquemático posicional do conjunto gerador / hélice, sensores e aquisição de dados, adaptado de [1].
No trabalho elaborado por C. Ghita et al. [2], este propôs-se a fazer a montagem
de um laboratório de aerodinâmica para a execução de testes a turbinas eólicas de baixa
potência. Para a realização dos testes necessários, este construiu um banco de ensaios
com o esquemático apresentado na Fig. 4.

8
Fig. 4 - Esquema global do sistema: 1 - conversor de frequência; 2 - motor de indução trifásico; 3 - caixa de velocidades; 4 - simulador do hélice; 5 - sensor de binário; 6 - gerador síncrono de ímanes
permanentes; 7 - termopar de temperatura;8 – retificador de fase; 9 – inversor de fase; 10 – transdutor de tensão resistivo; 11 – placa de aquisição; 12 – transdutor de corrente; 13 – computador de processamento de
dados; 14 – sensor de velocidade; R,S,T – fase de corrente elétrica; N – neutro de corrente elétrica [2]
Apesar da utilização de diversos aparelhos, instrumentos de medida e aquisição
de dados, o que se realça de maior importância para aprendizagem futura, é a utilização
de uma placa de aquisição da National Instruments. Esta possui, entre outras
características, saídas digitais de 16 bits, entradas analógicas até 10 V e resolução de
0,15 mV. Posteriormente, toda a informação convergiu para o computador onde foi
convertida e visualizada através da ferramenta de programação gráfica LabVIEW.
2.2 Veículos de voo autónomos
De forma a obter o melhor desempenho do conjunto motor / hélice a baixas
velocidades para hélices de pequenas dimensões, John Brandt [3], executou vários
ensaios a fim de obter resultados satisfatórios quanto à escolha do melhor hélice. Os
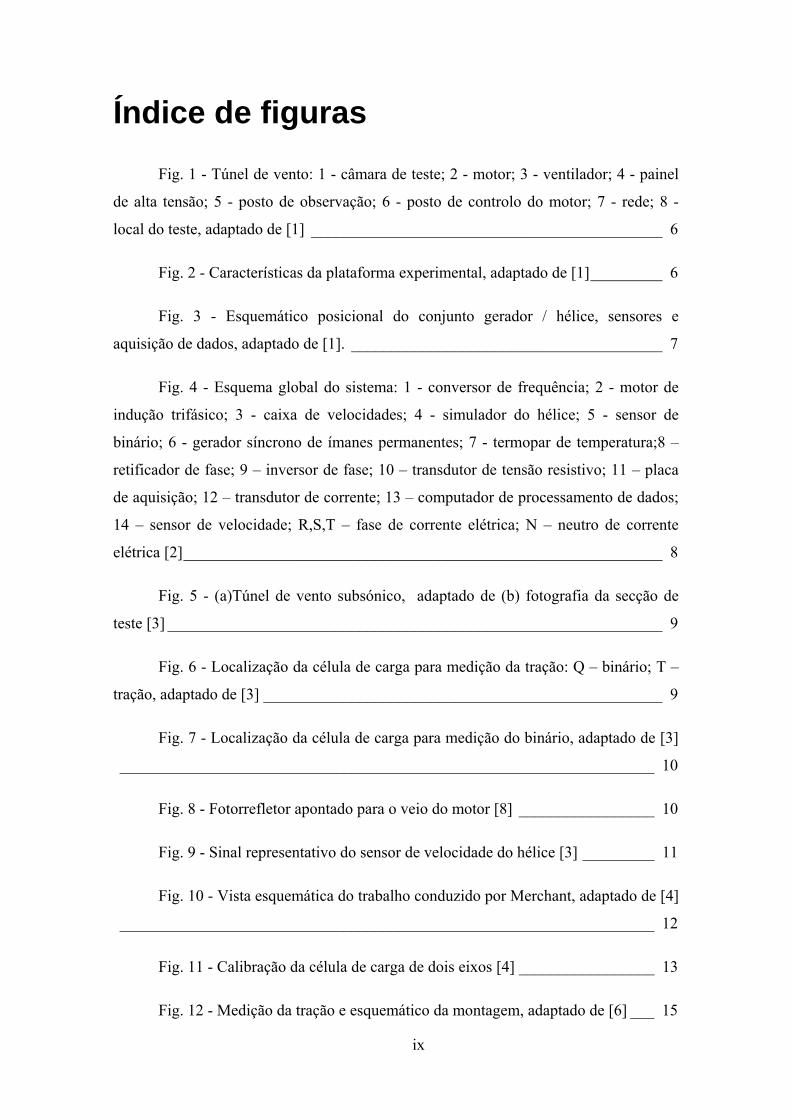
testes foram efetuados no interior de um túnel de vento subsónico, conforme a Fig. 5.
9
Fig. 5 - (a)Túnel de vento subsónico, adaptado de (b) fotografia da secção de teste [3]
O conjunto foi fixado à superfície superior através de uma barra metálica
vertical, tal como se vislumbra na figura anterior (b). Para adquirir a tração e binário
produzido foram utilizadas duas células de carga diferentes. A primeira consiste numa
célula de carga InterfaceSM-10 com capacidade máxima até 10 lb, disposta numa
estrutura em forma de T, como se pode ver na Fig. 6.
Fig. 6 - Localização da célula de carga para medição da tração: Q – binário; T – tração, adaptado de [3]

10
A segunda medição é constituída por dois transdutores RTS-25 e RTS-100 da
Transducer Techniques que estavam dispostos entre o dispositivo de suporte do motor e
o suporte em formato T, tal como se apresenta na Fig. 7.
Fig. 7 - Localização da célula de carga para medição do binário, adaptado de [3]
A velocidade de rotação do hélice foi obtida por um fotorrefletor, HOA1180-002
do fabricante Honeywell, localizado próximo do veio do motor, conforme se pode
verificar na Fig. 8.
Fig. 8 - Fotorrefletor apontado para o veio do motor [8]
O veio possuía um refletor permitindo assim que o fotorefletor detetasse a
passagem de uma rotação, produzindo a saída um sinal de onda quadrada, Fig. 9. A
contagem dos pulsos durante um intervalo de tempo permite obter o número de rotações

11
por minuto. O fotorefletor utilizado consegue detetar velocidades entre o intervalo de
1,33 Hz e 20 kHz, que depois de tratada indica a velocidade de rotação do hélice.
Fig. 9 - Sinal representativo do sensor de velocidade do hélice [3]
Por último, os dados foram encaminhados para um computador com uma placa
de aquisição de dados da National Instruments, NIPCI-6031E 16-bit analog-to-digital,
que possui 16 bits de resolução o que possibilita uma precisão de 0.15 mV para uma
tensão de referência de 10 V.
O trabalho levado a cabo por Merchant [4] centrou-se no estudo do desempenho
de hélices no regime dos baixos números de Reynolds1 para aplicações de veículos
aéreos não tripulados (UAV, acrónimo do inglês Unmanned Aerial Vehicles). Deste
modo, o autor elaborou o seguinte esquema, descrito na Fig. 10, onde se destacam três
secções distintas: uma secção responsável por recolher os dados do conjunto localizada
no interior do túnel de vento, outra secção no exterior do túnel que tem como finalidade
acondicionar os dados provenientes dos sensores e uma última secção encarregada pela
amostragem dos dados num computador.
1 Definição: “Número adimensional que é utilizado como um índice das características de um fluído e que expressa a importância relativa das forças de inércia e das forças de viscosidade num sistema de fluxo. Um número de Reynolds pequeno está associado ao escoamento laminar e um número grande ao escoamento turbulento.” [5]

12
Fig. 10 - Vista esquemática do trabalho conduzido por Merchant, adaptado de [4]
Os sensores mais relevantes, estão dispostos numa estrutura com o formato em C
fixada numa base sólida em ferro. Acoplada à estrutura encontra-se a célula de carga
multi-parametro da FUTEKTM capaz de fazer uma medição apurada (0.05% full scale)
da tração (até 50 lb) e do binário (até 50 in-lb) em simultâneo. A velocidade do hélice
foi verificada através de um sensor magnético, Dynapar Series 54ZT Magnetic Pickup
(capaz de ler 20 000 alvos/s) e um elemento metálico situado no hélice, permitindo
obter velocidade da mesma forma que no trabalho anterior.
A amplificação dos sinais e o seu acondicionamento foi conseguido por um
multimódulo amplificador de tensão Vishay-Ellis 2210. Este aparelho permitiu a
configuração do filtro desejado e um ganho preciso. Depois de todos os sinais estarem
devidamente tratados, estes seguiram para um conversor analógico-digital, 16-bit
Measurement Computing 16/16 DAS A2D Card, que serve de ponte entre os sensores e
o computador Pentium-4. Salienta-se que, neste trabalho a célula de carga foi calibrada
com pesos aferidos para obter a melhor afinação da tração e do binário, ver Fig. 11.

13
Fig. 11 - Calibração da célula de carga de dois eixos [4]
Tendo como referência a figura anterior observa-se que a calibração da célula de
carga, necessitou da construção de uma estrutura própria, que permitiu aplicar tração e
binário puros. Para o teste de calibração foram usadas massas aferidas, que foram
repetidamente utilizadas com o objetivo final de obter o comportamento da célula de
carga.
2.3 Micro-veículos Aéreos
A experiência conduzida por Kotwani K. [6], focou-se na caracterização do
conjunto motor / hélice para micro-veículos aéreos ( MAV’s acrónimo do inglês Micro
Air Vehicle), para tal foi utilizada uma panóplia de instrumentos para a medição de
vários parâmetros tal como mostra a Tabela 1.
Tabela 1 - Lista de sensores usados e parâmetros a medir – parte 1 [6]
Parâmetros Sensores Imagens
1 Tração produzido
pelo hélice
Célula de carga

14
Tabela 2 - Lista de sensores usados e parâmetros a medir – parte 2 [6]
2 Binário no veio do
motor
Sensor de binário
3 Velocidade do vento
dentro do túnel
“pitot-tube” e micro-
manometro
4 Tensão e corrente
consumido pelo
motor
Fonte de alimentação
regulada DC
5 RPM do hélice Sensor Ótico
6 Pressão e
temperatura ambiente
Barómetro digital
Para a medição da tração e do binário produzidos pelo conjunto motor / hélice,
foi necessária a construção de duas configurações distintas, uma configuração vertical e
outra horizontal.
Na configuração vertical realizou-se a medição da tração, o sensor estava ligado
fisicamente ao conjunto motor / hélice, que ao realizar trabalho produzia uma deflexão
na célula de carga, ver Fig. 12.

15
Fig. 12 - Medição da tração e esquemático da montagem, adaptado de [6]
Na configuração horizontal efetuou-se a medição do binário, esta consistia num
suporte horizontal onde a célula de carga responsável pela leitura se situava entre o
motor e o hélice, ver Fig. 13.
Fig. 13 - Medição do binário e esquemático da montagem, adaptado de [6]
O interesse crescente em micro veículos aéreos, usados na indústria e para fins
militares, expôs a falta de conhecimento de dados sobre micro hélices, por este motivo
Deters [7], produziu um estudo das características dos micro hélices para preencher a
lacuna de informação para baixos números de Reynolds.
Os parâmetros a obter foram, a tração, o binário e a velocidade, assim foi
montado um suporte, como mostra a Fig. 14, que pudesse acolher todos os componentes
necessários a aquisição de dados.

16
Fig. 14 - Esquemático do equipamento experimental de teste, adaptado de [7].
De salientar que as células de carga que são responsáveis pela obtenção da tração
e do binário estão dispostas em série e realizam as leituras no mesmo eixo.
A tração realizada pelo hélice foi medida por uma célula de carga, SSP1-0.3KG,
do fabricante Load Cell Central e o binário produzido foi conseguido utilizando um
transdutor, RTS-25 do fabricante Transducer Techniques. A velocidade do hélice foi
registada através de um emissor e recetor de infravermelhos e foram ainda obtidos
dados referentes à pressão atmosférica e temperatura ambiente.
O motor foi acoplado a uma estrutura de suporte que, por sua vez esta ligada ao
transdutor e à célula de carga. Estes dois instrumentos estavam protegidos por uma
plataforma aerodinâmica (representado a tracejado na Fig. 14) com o objetivo de não
perturbar o escoamento de ar produzido pelo hélice. Os dados provenientes do
transdutor e da célula de carga foram recebidos e convertidos em informação digital por
uma placa de aquisição da National Instruments que está ligada ao computador.
2.4 Discussão dos sistemas apresentados
O estudo dos trabalhos desenvolvidos anteriormente revelou, em que condições
laboratoriais se realizaram os testes, que grandezas físicas foram solicitadas, que
aparelhos foram requeridos, quais as disposições dos aparelhos envolvidos nos ensaios,
sistemas de aquisição de dados e também o sistema de visualização dos dados.
No primeiro estudo, M. Predescu et al. [1], apresenta um sistema capaz de medir
a tração e binário, com duas células de carga independentes para cada medida e em

17
paralelo uma com a outra, deste modo eliminou o erro produzido por umas das células.
Retira também informações de velocidade do hélice e de velocidade do vento para
assim completar o seu estudo. Para aquisição dos dados, o autor utilizou uma placa
dedicada para a obtenção dos dados.
Em Ghita et al. [2], o trabalho assenta na construção de um laboratório de
aerodinâmica, para tal utilizou vários instrumentos de medida para a obtenção de,
tensão, corrente, binário, velocidade do motor, velocidade do vento e temperatura. Para
o acondicionamento destes sinais, o autor utilizou uma placa de aquisição da Nationals
Instruments também está dedicada a conversão de sinais analógicos em sinais digitais.
Para a visualização dos dados utilizou o software LabVIEW, também este produto da
Nationals Instruments.
Para caracterizar o desempenho do conjunto motor / hélice, utilizando hélices de
pequenas dimensões, John Brandt [3], empregou tal como M. Predescu et al. [1], duas
células de carga para a obtenção dos parâmetros físicos, tração e binário. Construiu uma
estrutura própria em que as duas células assentam e realizam a sua tarefa sem causar
erro de medição da outra e utilizou um fotorrefletor para a deteção da velocidade do
hélice. Da mesma forma que Ghita et al. [2], o autor serviu-se também do hardware e o
software da Nationals Instruments para o acondicionamento dos sinais e posterior
visualização destes.
Como forma de caracterizar o desempenho do hélice para baixos números de
Reynolds, Merchant [4], usou uma só célula de carga de dois eixos da FUTEKTM capaz
de realizar a leitura da tração e do binário em simultâneo, eliminando assim qualquer
interferência nas medições por parte de outra célula de carga. Apenas neste trabalho se
referencia a utilização de um amplificador de tensão para elevar as muito baixas tensões
à saída da célula de carga para valores de tensão aceitáveis para a conversão dos sinais
em digital. Para a conversão dos sinais o autor usou uma placa de acondicionamento
dedicada e a velocidade do hélice foi obtida através de um sensor magnético. É neste
estudo também que se evidencia a construção de uma estrutura própria para a calibração
da célula de carga e a aplicação de massas aferidas como forma de obter a curva
característica da célula de carga.

18
O ensaio conduzido por Kotwani K. [6], para descrever o desempenho do
conjunto motor / hélice para os Micro-veículos Aéreos, levou o autor a construir duas
estruturas, uma estrutura vertical que inclui-a uma célula de carga para a medição da
tração e uma estrutura horizontal que incorporava uma outra célula de carga para a
medição do binário. Além destes dois parâmetros também realizou a medição da
velocidade do hélice com um sensor ótico, pressão e temperatura atmosférica e a
medição do vento através de um anemómetro.
Por último apresentou-se o estudo conduzido por Deters [7], este utilizou
também duas células de carga para a medição da tração e do binário em série uma com a
outra. Para acomodar as células de carga, projetou uma estrutura aerodinâmica para que
estas não interferissem na medição de outros parâmetros. O acondicionamento e
visualização dos dados ficaram ao cargo também do software e hardware da Nationals
Instruments.

19
3 Caracterização do aeromodelo
Para cada aeromodelo, os fabricantes fazem um prognóstico de qual o grupo
propulsor a utilizar. Para a propulsão realizada pelo hélice, o grupo propulsor é
escolhido para que seja atingido o melhor regime de voo pretendido. Deste modo, a
escolha de cada um dos constituintes deve ser cuidada para que as características
nominais de um elemento não sejam ultrapassadas, evitando assim risco de mau
funcionamento e integridade do aeromodelo.
Assim seguidamente, faz-se uma descrição geral de cada um dos constituintes
para entender quais as suas características, as suas funções e sua participação para o
bom funcionamento do conjunto.
3.1 Aeromodelos
Hoje em dia existem vários aeromodelos e apesar da variedade de formas de
construção, estes são essencialmente sujeitos a quatro forças fundamentais, tração,
arrasto, sustentação e o peso, ver Fig. 15.
Fig. 15 - Forças fundamentais que atuam num avião em regime de voo, adaptado de [8]
De seguida pormenoriza-se cada uma das quatro forças envolventes no
aeromodelo em regime de voo:

20
• Tração: é a força motriz que impele qualquer tipo de veículo com sistema
de propulsão, esta resulta da ação conjunta entre o motor / hélice e é
paralela ao eixo longitudinal do aeromodelo.
• Arrasto: resulta do fluxo de ar em redor do aeromodelo, esta força oferece
resistência ao movimento do avião e como tal é paralela ao eixo
longitudinal do aeromodelo.
• Sustentação: resulta também do fluxo de ar que circula em volta do
aeromodelo, esta força resulta maioritariamente do trabalho realizado pelas
asas e é responsável pela sustentação do avião em regime de voo, esta
componente é perpendicular ao movimento.
• Peso: a força peso resulta de peso conjunto do aeromodelo, da carga e do
combustível, esta oferece resistência a sustentação já que puxa o avião
para baixo [9].
3.2 Hélices
Os hélices dos aeromodelos são constituídas por dois ou mais hélices
posicionados com ângulo destinado e um eixo central ao qual os hélices permanecem
fixos. Dependendo no número de hélices, as hélices podem ser monopás, bipás, tripás,
entre outras.
As suas características aerodinâmicas assemelham-se às de uma asa, o hélice é
constituído por: bordo de ataque, bordo de fuga, bordos marginais, perfis, como se
apresenta na Fig. 16
Fig. 16 - Constituição de uma lâmina: 1 – bordo de ataque; 2 – bordo de fuga; 3 – perfil; 4 – bordo marginal, adaptado de [10]
As duas características fundamentais do hélice são o diâmetro e o passo (ou pitch
em inglês) que se especificam nos seguintes subcapítulos.

21
3.2.1 Diâmetro do hélice
O diâmetro do hélice é precisamente o diâmetro da circunferência descrita pelas
pontas das lâminas na sua rotação. Numa hélice bipá, será pois a distância que vai da
ponta de um hélice à outra, ver Fig. 17.
Fig. 17 – a) Caracterização do diâmetro de um hélice: D – diâmetro; b) Caracterização do passo: h – altura; x – largura; adaptado de [11]
Através figura anterior podemos relacionar o diâmetro com o passo, porque a
secção descrita pela equação (1), corresponde a uma secção de corte que caracteriza o
passo, ver:
Passo , D (1)
• D, diâmetro do hélice
• h, altura
• x, largura
Idealmente o diâmetro do hélice deveria ser grande para regimes de voo a baixas
velocidades e pequeno para regimes de voo a altas velocidades, um hélice com diâmetro
controlado resolveria este problema mas acrescenta custos a nível estrutural e de
controlo desta, motivo para não ser implementada. A solução é criar uma hélice com um
diâmetro largo para operações a baixa velocidade, mas mantendo o tamanho do hélice
pequeno para altas velocidades de operação.
22
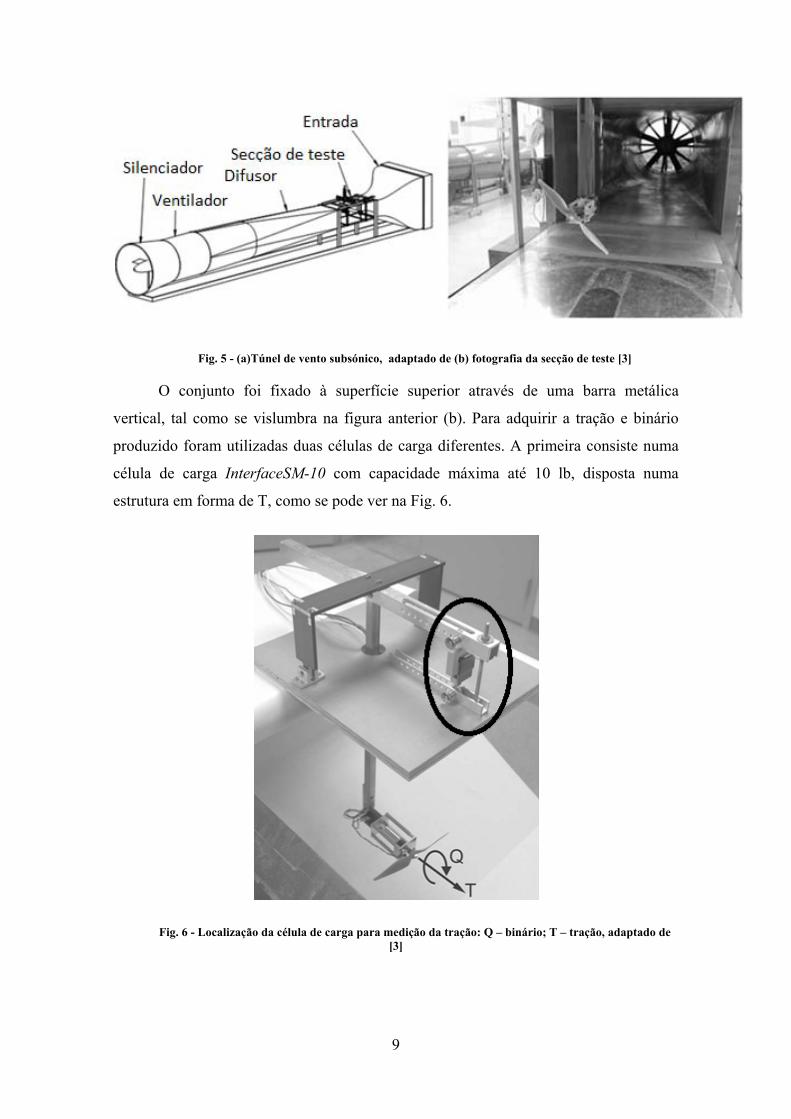
3.2.2 Passo do hélice
O passo é a distância que o hélice avançaria numa rotação completa num meio
viscoso onde pudesse comportar-se como um parafuso. Mas tal não acontece porque o
hélice trabalha num meio “mais compressível e elástico” [12] e deste modo sofre perdas
contribuindo para um menor passo em detrimento do passo teórico como se apresenta
na Fig. 18.
Fig. 18 - Passo de uma hélice [10]
Assim sendo o passo pratico é a distancia que na realidade que o hélice avança
numa rotação completa. O recuo é a diferença entre o passo teórico e passo prático.
Uma hélice com um rendimento alto terá que ter um passo constante, onde todas
as secções do hélice terão que produzir o mesmo avanço, como tal estas vão
experimentando ao longo do hélice uma torção, ver Fig. 19, para que as diferenças de
velocidade de rotação verificadas entre a secção da lâmina perto do centro do hélice e a
ponta mais afastada do centro do hélice sejam eliminadas.

23
Fig. 19 - Elaboração do passo de um hélice [10]
3.2.3 Desempenho do hélice
O desempenho de uma hélice é dependente de dois conjuntos diferentes de
parâmetros: condições de operação e as propriedades geométricas. Relativamente às
condições de operação, as grandezas implícitas são velocidade de deslocamento, V∞,
velocidade de rotação, n, e número de Reynolds, Re. As propriedades geométricas são
diâmetro, D, corda do perfil, c, e todos os detalhes que caracterizam uma configuração.
Assim sucintamente o desempenho do hélice pode-se representar pela seguinte
expressão [12]:
Desempenho do hélice = F (V∞, n, D, Re, ρ, …)
(2)
• , massa volúmica (kg/m3)
• , velocidade (m/s)
• , diâmetro (m)
• , viscosidade dinâmica do fluido (Pa.s)
A comparação entre os diferentes hélices implica por isso a aplicação da análise
dimensional. Os principais fatores que então resultam são o coeficiente de potência,
equação (3), coeficiente de binário, equação (4), e o coeficiente de tração, equação (5)
[12].

24
(3)
(4)
(5)
Em que:
• P, potência mecânica (W)
• Q, binário (N.m)
• T, tração (N) • ρ, densidade volúmica (Kg/m3)
• V∞, velocidade de deslocamento (m/s)
• D, diâmetro (m)
3.3 Motor Elétrico de corrente contínua
Os motores elétricos fornecidas pelos fabricantes, possuem parâmetros de ligação
e de operação que devem ser respeitados para que o motor trabalhe dentro dos valores
nominais no qual todos os outros dados de funcionamento do motor estão relacionados.
Os valores mais acessíveis de obter no que respeita as características físicas do
motor são a tensão nominal (U), corrente consumida (I), a resistência interna (R),
velocidade de rotação (ω) e rendimento ou eficiência máxima (η). Referir também que a
Lei de Ohm relaciona três destes parâmetros, nomeadamente a tensão, corrente e
resistência, como se apresenta na equação (6).
U R I (6)
• U, tensão (V)
• R, resistência (Ω)
• I, intensidade da corrente (A)
O motor de corrente contínua converte a corrente elétrica em binário e a tensão
em rotações por minuto (rpm). O binário é a força de torção presente no veio do motor,

25
parâmetro expressa-se em Newton*metro (N.m). Através da relação entre o binário e a
velocidade de rotação do motor, obtém-se a equação (7).
Pmec ω (7)
• Pmec, potência mecânica (W)
• , binário (N.m)
• ω, velocidade rotação (rad/s)
Idealmente toda a potência consumida pelo motor seria transformada totalmente
em potência mecânica, mas isso não se verifica na prática, devido as perdas do motor,
deste modo, o motor consume mais potência do que aquela que é aplicada ao veio do
motor. Assim todos os motores vêm com um valor referente a sua eficiência máxima,
que é o rendimento do motor que relaciona a potência de entrada com a potência de
saída do motor, conforme a equação 8.
η P íP
100% (8)
• η, rendimento do motor
• P saída, potência de saída desenvolvida pelo motor, (W)
• P entrada, potência elétrica aplicada ao motor, (W)
Existem quatro tipos de perdas neste tipo de motor: perdas por efeito de joule nas
resistências dos enrolamentos2; perdas magnéticas3 (perdas por histerese e correntes
focault); perdas mecânicas4 ou rotacionais; perdas parasitas5. Estas forças são
quantificadas e expressas como perdas do motor elétricos, através do somatório de todas
as perdas obtém-se a equação (9).
2 -As perdas elétricas são do tipo RI2, aumentam acentuadamente com a carga aplicada ao motor. Estas perdas, por efeito de Joule podem ser reduzidas, aumentando a secção do estator e dos condutores do rotor. 3 - As perdas magnéticas ocorrem nas lâminas de ferro do estator e do rotor. Ocorrem devido ao efeito de histerese e às correntes induzidas (neste caso, correntes de Foucault), e variam com a densidade do fluxo e a frequência. Podem ser reduzidas através do aumento da secção do ferro no estator e rotor, através do uso de lâminas finas e do melhoramento dos materiais magnéticos. 4 - As perdas mecânicas são devido à fricção entre os apoios e rolamentos, ventilação e perdas devido à oposição do ar. Podem ser reduzidas, usando procedimentos com baixa fricção e com o aperfeiçoamento do sistema de ventilação. 5 - As perdas parasitas são devidas a fugas do fluxo, distribuição de corrente não uniforme, imperfeições mecânicas nas aberturas para escoamento do ar, e irregularidades na densidade do fluxo do ar ao ser escoado pelas aberturas. Podem ser reduzidas através da otimização do projeto do motor e ainda de uma produção ou fabrico cuidados [13]

26
Perdas P P P P (9)
• Pjoule, perdas nas resistências dos enrolamentos, (W)
• Pmag, perdas por histerese e correntes focault, (W)
• Pmec, perdas mecânicas, (W)
• Ppara, perdas parasitas, (W)
Por fim a potência mecânica final vai ser a subtração entre a potência elétrica de
entrada menos as perdas resultantes do motor elétrico resultando a equação (10):
Pmec Pentrada Perdas (10)
• Pmec, Potência mecânica, (W)
• Pentrada, Potência elétrica aplicada ao motor, (W)
• Perdas, perdas gerais, (W)
Os motores elétricos mais utilizados nos aeromodelos são divididos em duas
características distintas, motores com escovas ou motores sem escovas (do termo em
inglês Brushless). Em seguida caracteriza-se estes motores para dar a conhecer em
pormenor cada um.
3.3.1 Motores com escovas
O motor elétrico com escovas é formado por uma carcaça com ímanes
permanentes e o “induzido” ou rotor, este último elemento é responsável por fazer a
conversão de energia elétrica para energia mecânica. As escovas, representadas na Fig.
20, são responsáveis pela passagem de corrente elétrica para o comutador que se
encontra no induzido.
Fig. 20 - Disposição das escovas no motor [14]

27
O induzido é constituído por enrolamentos que estão protegidos pela armadura e
o comutador, Fig. 21
Fig. 21 – Induzido de um motor [14]
A carcaça do motor é responsável pelo suporte e proteção do induzido, Fig. 22.
Fig. 22 - Detalhe do interior do motor com escovas [14]
É de referir também que a eficiência destes motores depende da qualidade do
material constituinte dos ímanes permanentes, deste modo se a constituição for ferrite o
motor terá uma eficiência abaixo dos 75% no entanto se for de Cobalto Neodímio ou
Samário, ou uma liga destes passa a ter uma eficiência de 95%, , consequentemente são
mais caros.
3.3.2 Motores sem escovas
Os motores “sem escovas”, do inglês “Brushless”, são caracterizados pela
ausência de escovas, porém a sua alimentação para os enrolamentos vem diretamente do
controlador eletrónico de velocidade que faz a gestão da sequência pela qual os
enrolamentos são alimentados pela corrente elétrica. Estes motores são muito mais

28
eficientes, porque os ímanes permanentes são constituídos por Neodímio, mas também
porque a inexistência de escovas evita o atrito gerado entre estas e o comutador. Os
motores sem escovas são divididos em duas características: os “inrunner” ou de ímanes
rotativos; os “outrunner” ou de “caixa rotativa”.
a) Motores “inrunner” ou de ímanes rotativos: estes caracterizam-se pelo
facto de os ímanes permanentes rodarem em conjunto com o eixo do motor. Nestes
motores os enrolamentos e a armadura estão dispostos na carcaça do motor garantindo
rotações extremamente elevadas. Para aproveitar as altas rotações produzidas usam-se
hélices pequenas para que o conjunto motor / hélice atinja grandes velocidades ou
usam-se caixas redutoras para poder utilizar hélices de maior diâmetro, Fig. 23.
Fig. 23 - Motor "inrunner" [14]
b) Motores “outrunner” ou de caixa rotativa: ao contrário dos motores
com escovas onde é o induzido que roda, nestes é a carcaça que desempenha essa
função. Os ímanes estão colocados como nos motores com escovas, na carcaça do
motor, em redor do induzido e rodam junto com a carcaça, enquanto o induzido fica
imóvel, ver Fig. 24.
Fig. 24 - Motor "outrunner” [14]
Estes motores são constituídos por 5 ou mais pares de ímanes permanentes, que
em conjunto produzem um campo magnético elevado permitindo a estes motores operar
com hélices de maiores dimensões sem precisarem de caixa redutora, sendo uma boa

29
opção aos motores “inrunner” apesar de serem menos eficientes são mais baratos e de
simples operação.
3.4 Controlador eletrónico de velocidade
Para controlar a velocidade dos motores é fundamental um componente
eletrónico que assegure esse objetivo, ao longo dos anos desenvolveram-se varias
soluções para o propósito. Através da introdução generalizada do microprocessador para
controlar a potência e dos vários mecanismos de segurança, levou a que o controlador
eletrónico de velocidade seja um produto muito mais leve que os outros e quase sem
falhas de operação.
O modo de funcionamento é simples, por exemplo a velocidade de um motor DC
que é diretamente proporcional a tensão de alimentação, ao reduzir a tensão de 12 V
para 6 V, a velocidade do motor passa para metade. Para que isto aconteça o controlador
de velocidade aciona e/ou desliga um interruptor (switch), que faz com que o motor ora
esteja alimentado a 12 V ou a 0 V, então se o tempo que o interruptor está fechado for
igual ao tempo em que está aberto o motor só vê na sua entrada de alimentação 6 V e a
sua velocidade vai diminuir proporcionalmente, como se apresenta na Fig. 25.
Fig. 25 - Relação entre velocidade do motor e tensão de entrada, adaptado de [15]
O controlador de velocidade opera na tensão que é aplicada ao motor variando
assim a sua velocidade, a este on-off de operação do interruptor dá-se o nome de PWM
(acrónimo do inglês, Pulse Width Modulation), como podemos observar na Fig. 26.

30
Fig. 26 - Sinais de PWM com diferentes duty cycles [16]
3.5 Baterias
A bateria transforma energia química em energia elétrica, esta é constituída por
um líquido, o eletrólito, e por elétrodos de materiais diferentes. O eletrólito é uma
mistura líquida de químicos que proporciona isolamento e fornece os eletrões que vão
convergir aos elétrodos para assim produzir diferença de potencial entre os terminais da
bateria.
O funcionamento da bateria rege-se sobre o princípio da oxidação - redução,
reação redox.”Numa reação redox há sempre uma espécie que sofre a oxidação e outra
que sofre a redução. Uma espécie que se oxida cede eletrões à outra espécie,
reduzindo-a, por isso, à espécie que se oxida chama-se redutor ou agente redutor. Uma
espécie que se reduz capta eletrões da outra espécie, oxidando-a, por isso, à espécie
que se reduz chama-se oxidante ou agente oxidante” [17].
A tensão produzida pela bateria depende dos materiais usados na construção
desta. Para obter a tensão e corrente desejada, faz-se disposições de pilhas, quer seja
ligação de pilhas em série (aumento de tensão), ou ligação de pilhas em paralelo
(aumento de corrente) como se apresenta na Fig. 27.

31
Fig. 27 - Aspetos de construção de uma bateria [18]

32

33
4 Método Experimental
Esta etapa, descreve o trabalho que foi desenvolvido para atingir os
compromissos a que este projeto se proponha. A grande função deste banco de ensaios é
otimizar o regime do par ideal motor / hélice. Para esse propósito o banco de ensaios
tem que ter a capacidade de medição de parâmetros relevantes tais como o binário, a
tração, a velocidade de rotação e potência elétrica (a potência eléctrica é igual ao
produto entre a tensão e a corrente).
Este capítulo refere também o trabalho realizado anteriormente no DEM que
visou um estudo sobre a construção de um banco de ensaios. Depois introduz-se os
fundamentos teóricos da eletrónica a utilizar no banco e as ferramentas de software a
usar.
4.1 Desenvolvimento do Banco de ensaios
O banco de ensaio para o conjunto motor / hélice, foi alvo de estudo de trabalho
de dissertação por parte de um ex-aluno do DEM, de seguida resume-se o projeto da
montagem do banco de ensaios, salientando o esquema e ordem pela qual as todas
partes são emparelhadas. Para uma maior compreensão da informação seguidamente
apresentada, é aconselhada a leitura do trabalho de dissertação realizado por Costa, C.,
H. et al. [12].
4.1.1 Descrição do banco de ensaio para o conjunto propulsor
Em termos mecânicos, a célula de carga deverá permitir a leitura de um
deslocamento linear e rotacional, ambos no mesmo eixo, exemplificando o trabalho
elaborado por Merchant [4]. A capacidade de uma só célula de carga poder efetuar
medições de dois parâmetros é uma vantagem para a sua integração no banco de ensaios
já que torna mais fácil a sua inclusão em conjunto com o motor / hélice e elimina as
interferências de medição dos diferentes deslocamentos.
4.1.2 Fixação do conjunto motor / hélice
Para o teste dinâmico do conjunto, foi projetado um suporte do motor e da célula
de carga que está esquematizado na Fig. 28, este é constituído por: motor (e.) à célula de

34
carga (c.) e ao braço de suporte (a.). O elemento assinalado em d., funciona como
espaçador e como superfície de fixação do motor à célula de carga, ambos com 4
parafusos. O elemento indicado em b. é usado apenas como superfície de fixação da
célula de carga ao suporte, com 4 furos para os 4 parafusos da célula e um furo central
para o suporte.
Fig. 28 - Esquema de ligação entre as várias partes mecânicas [12]
Esta ligação entre as partes mecânicas envolvidas é suportada por uma coluna
vertical situada dentro do túnel aerodinâmico, esta é composta por dois elementos, com
quatro furações cada, na posição horizontal que fixa a coluna horizontal que suporta
todo o conjunto, ver Fig. 29.
Fig. 29 - Fixação do braço de suporte à coluna vertical [12]

35
4.1.3 Sistema de medição e monitorização
Para medição e monitorização dos testes ao conjunto, foi elaborado um
esquemático do ambiente laboratorial envolvido, nesta pré-visualização destaca-se três
divisões específicas de trabalho, como se apresenta na, Fig. 30.
Fig. 30 - Esquemático do ambiente laboratorial [12]
É composto pelos elementos de leitura da tração, do binário e velocidade do
hélice incluídos na secção de ensaio; pelos elementos de comando da rotação do motor,
controlo da potência elétrica e leitura dos parâmetros tensão e corrente presentes na
secção de controlo e aquisição de dados; e no final, na secção de processamento
encontra-se o acondicionamento de sinais e sua leitura. As linhas tracejadas representam
as ligações entre as diferentes secções do banco de ensaios e a linha contínua as ligações
entre cada componente no interior da sua secção.

36
4.2 Sistema de aquisição de dados
A obtenção dos dados necessários para a melhor caracterização do conjunto
motor / hélice, requisitou equipamentos de medida e configurações de aplicação destes.
Seguidamente exibe-se a teoria associada aos instrumentos eletrónicos utilizados e sua
aplicação no banco de ensaios.
4.2.1 Leitura da tensão
A leitura da tensão é um requisito de parâmetro a obter, para tal, resolveu-se
aplicar um divisor de tensão, isto é, são colocadas em paralelo com a bateria duas
resistências em série, ver Fig. 31, a primeira resistência de valor superior à resistência
interna do motor, para que a corrente não flua por este novo caminho, e a seguinte
resistência de baixo valor para que se possa efetuar o cálculo do divisor de tensão.
Fig. 31 - Divisor de tensão e sua integração no banco de ensaios: Vin – tensão de entrada; Vout – tensão de saída; R1,R2 - resistências
Os cálculos a efetuar posteriormente para a obtenção da tensão têm como base a
equação (11):
(11)
• Vin, tensão de entrada (V)
• Vout, tensão de saída (V)
• R1,R2, resistências (Ω)

37
4.2.2 Leitura da corrente
O sensor de corrente, ou sensor de Hall, é baseado no parâmetro físico
descoberto em 1879 por Edwin Hall [19]. O efeito Hall refere-se à diferença de
potencial nos lados opostos de uma fina folha de material condutor, através da qual uma
corrente elétrica flui, criada por um campo magnético aplicado perpendicularmente à
componente Hall. O produto da tensão média pela intensidade de corrente é conhecido
como resistência Hall, e é característica do material condutor.
Existem inúmeras aplicações destes sensores, mas é a sua simplicidade de
operação e características físicas que permite uma boa relação de conversão o que
possibilita que este valor de corrente seja facilmente medido por um conversor
analógico-digital.
O sensor usado para medição da corrente, foi o LEM 55-P, ver Fig. 32. Este
sensor além de outras características mede corrente em AC e em DC, com uma corrente
nominal no primário (Ipn = 50 A) e com uma relação de conversão de 1:1000 para a
corrente presente no secundário (Isn = 50 mA). Este componente tem três pinos de
ligação em que os pinos “+” e “-” são a alimentação e o pino M contem o valor atual da
corrente.
Fig. 32 - Sensor de corrente e sua montagem: M – ponto de medida; Is – corrente no secundário; RM- resistência de medida [20]
Este componente vai ser introduzido em série no circuito, ver Fig. 33, entre a
bateria e o motor, obtendo a leitura da corrente consumida.

38
Fig. 33 - Esquemático do sensor de leitura da corrente consumida, A – sensor de corrente; M - motor
4.2.3 Leitura da velocidade
A velocidade de rotação do hélice será conseguida através de um recetor e
emissor de infravermelhos, ver Fig. 34, este tipo de sensor é muito utilizado como
detetor de presença e também para a conversão de movimentos rotativos ou
deslocamentos lineares em impulsos elétricos sob a forma de onda quadrada.
Fig. 34 - Emissor e recetor de infravermelhos:Vi – tensão de entrada; Vcc – tensão coletor comum; V0 –
tensão de saída [21]
Na sua forma mais simples o emissor e recetor de infravermelhos é constituído
por um LED (acrónimo do inglês Light Emmiting Diode) emissor de infravermelhos e
um fototransístor que é sensível a este comprimento de onda de luz.
Quando o fototransistor é incidido pelo raio de infravermelhos este fecha o
circuito e ponto de medida V0 fica a um “nível baixo” (fica com tensão de 0 V), quando
o raio de luz deixa de incidir, o fototransistor abre o circuito, o ponto de medida V0 fica
a um “nível alto” (fica com tensão de 5 V). Ora a intermitência entre o “nível alto” e o
“nível baixo” gera uma onda de saída caracterizada por onda quadrada que se pode
visualizar na Fig. 35.

39
Fig. 35 - Onda quadrada gerada pela leitura da velocidade [22]
O sensor escolhido para a tarefa de leitura da velocidade de rotação é o
HOA1405 Reflective Sensor [23], da Honeywell, ver Fig. 36.
Fig. 36 - Sensor de leitura da velocidade [23]
Este sensor consiste num díodo emissor de infravermelhos e um fototransistor
dispostos lado a lado, o ângulo em que estes se dispõem permite que o raio de
infravermelho proveniente do díodo seja direcionado para o fototransistor, é de
acrescentar o encapsulamento do par para diminuir a interferência de luz ambiente.
4.2.4 Leitura da Tração e do Binário
Este subcapítulo vai ser dividido em duas partes, para que seja mais fácil de
compreender os instrumentos necessários para a leitura dos parâmetros tração e binário,
assim dá-se a conhecer a célula de carga e posteriormente o Amplificador de
Instrumentação (A.I.).
As leituras da tração e do binário vão ser obtidas por uma (s) célula (s) de carga,
Fig. 37. Este instrumento de leitura é um dispositivo eletromecânico que permite a
medição da deformação ou flexão criada por um objeto e transforma esse deslocamento
numa saída de tensão na ordem dos milésimos do Volt (mV).

40
Fig. 37 - Células de carga [24]
A figura anterior representa apenas uma parte das células de carga existentes no
mercado, estas variam de tamanho, geometria e de aplicação. É constituída por um ou
mais extensómetros, este na sua simplicidade é uma resistência que varia de valor de
acordo com o deslocamento produzido. A célula de carga também é complementada
com um circuito que permite a medição de pequenas variações da resistência variável
denominado ponte de Wheatstone, Fig. 38.
Fig. 38 - Ponte de Wheatstone: R1, R2, R3, R4, - resistências; VE – tensão de entrada; VA – tensão de saída [25]
Os quatro braços da ponte são constituídos por quatro resistências de R1 a R4, e
o seu funcionamento é simples, se os nós 2 e 3 forem ligados a uma fonte de
alimentação conhecida VE, irá surgir uma outra tensão entre os nós 1 e 4 denominada
VA. A ponte de Wheatstone está equilibrada se se verificar a equação (12):
VAVE
0 (12)

41
• VA, tensão de saída (V)
• VE, tensão de entrada (V)
Para atingir este estado de equilíbrio é necessário as resistências estarem de
acordo com a equação (13):
R1 R2 R3 R4 ou então 12
43 (13)
• R1,R2,R3,R4, Resistências (Ω)
Assumindo que a ponte no seu estado inicial está em equilíbrio, qualquer
variação de qualquer resistência da ponte, irá provocar tensão no nó VA.
A célula de carga selecionada para a medição dos parâmetros foi uma célula da
FUTEK™ (1), como em Merchant [4], está é capaz de efetuar medições de tração e
binário no mesmo eixo, ver Fig. 39. Tem capacidade máxima de 22 kgf para a tração e
5,7 N.m para o binário, com valores de R.O. (acrónimo do inglês, rated output) de
0,05% FS (acrónimo do inglês, escala completa), segundo as especificações presentes
no documento [26]. A célula de carga será calibrada in situ, através de massas padrão.
Fig. 39 - Célula de carga selecionada FUTEKTM [26]
A diferença de potencial à saída da célula de carga é de uma grandeza na ordem
dos milivolt, deste modo, para este sinal ser mensurável por um sistema de aquisição de
dados precisa de ser amplificado através da utilização do A.I. que está esquematizado na
Fig. 40.

42
Fig. 40 - Amplificador de Instrumentação: V0 – tensão de saída; VS1,VS2, tensão de entrada; R1 – resistência de ganho (potenciómetro); R2,R3,R4,R5,R6 – resistências , adaptado de [27]
A sua utilização não é justificada apenas por amplificar o sinal de entrada, pois
com um único amplificador operacional poderíamos consegui-lo, mas por ter
características tais como: impedância de entrada muito elevada; impedância de saída
muito baixa; ganho preciso, estável e ajustável; amplificação diferencial com rejeição
completa da tensão comum às entradas.
Para saber qual o ganho de amplificação à saída do amplificador é necessário
aplicar a equação (14):
1 2 (14)
• A, ganho do amplificador
• V0, tensão de saída (V)
• Vs1, Vs2, tensão de entrada (V)
• R1,R2,R3,R4,R5,R6, resistências (Ω)
A seleção de um amplificador de instrumentação a utilizar baseou-se na escolha
de um componente integrado, que fosse de boa precisão e de baixo preço em relação a
outros do mercado. Assim a preferência recaiu sobre o integrado da Burr-BrownR, o
INA114 [28], ver Fig. 41.
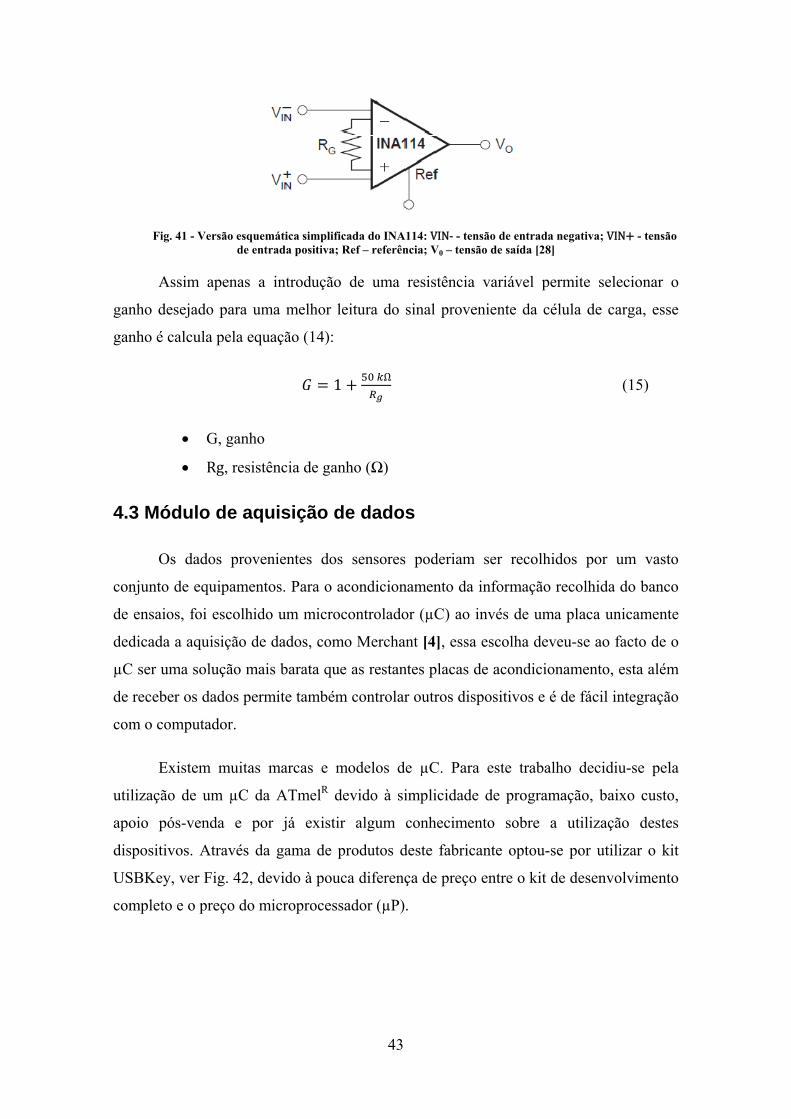
43
Fig. 41 - Versão esquemática simplificada do INA114: VIN‐ - tensão de entrada negativa; VIN - tensão
de entrada positiva; Ref – referência; V0 – tensão de saída [28]
Assim apenas a introdução de uma resistência variável permite selecionar o
ganho desejado para uma melhor leitura do sinal proveniente da célula de carga, esse
ganho é calcula pela equação (14):
1 Ω (15)
• G, ganho
• Rg, resistência de ganho (Ω)
4.3 Módulo de aquisição de dados
Os dados provenientes dos sensores poderiam ser recolhidos por um vasto
conjunto de equipamentos. Para o acondicionamento da informação recolhida do banco
de ensaios, foi escolhido um microcontrolador (µC) ao invés de uma placa unicamente
dedicada a aquisição de dados, como Merchant [4], essa escolha deveu-se ao facto de o
µC ser uma solução mais barata que as restantes placas de acondicionamento, esta além
de receber os dados permite também controlar outros dispositivos e é de fácil integração
com o computador.
Existem muitas marcas e modelos de µC. Para este trabalho decidiu-se pela
utilização de um µC da ATmelR devido à simplicidade de programação, baixo custo,
apoio pós-venda e por já existir algum conhecimento sobre a utilização destes
dispositivos. Através da gama de produtos deste fabricante optou-se por utilizar o kit
USBKey, ver Fig. 42, devido à pouca diferença de preço entre o kit de desenvolvimento
completo e o preço do microprocessador (µP).

44
Fig. 42 - Kit USBKey da Atmel AT90USB1287 [29]
O µC é constituído por portos que são portas de entrada ou saída de dados,
timers, conversor analógico-digital (ADC) que transforma a tensão (informação
analógica) em bits (informação digital) e porta de comunicação de dados (porta série e
porta USB) para controlo e interação com o computador ou outros dispositivos.
Para a aquisição dos parâmetros provenientes da célula de carga foi necessário a
utilização do ADC µC, este possui 10 bits de resolução expandido por 8 canais de
leitura o que facilita leituras de diferentes parâmetros em simultâneo e permite também
uma leitura muito precisa na casa milésimas do volt, como se apresenta na equação
(16):
ADC (16)
• ADC, valor de tensão convertido pelo µC em valor analógico
• Vin, tensão de entrada lida pelo µC (V)
• Vref, tensão de referência (neste caso utilizamos como referência a tensão
de 2,56 V)
A escala mínima de tensão lida pelo ADC obtém-se igualando está variável a 1,
resolvendo a equação (15) resulta um Vin, de 0,0025 V, ou seja, significa que cada
incremento de bit corresponde a soma de 0,0025 V.
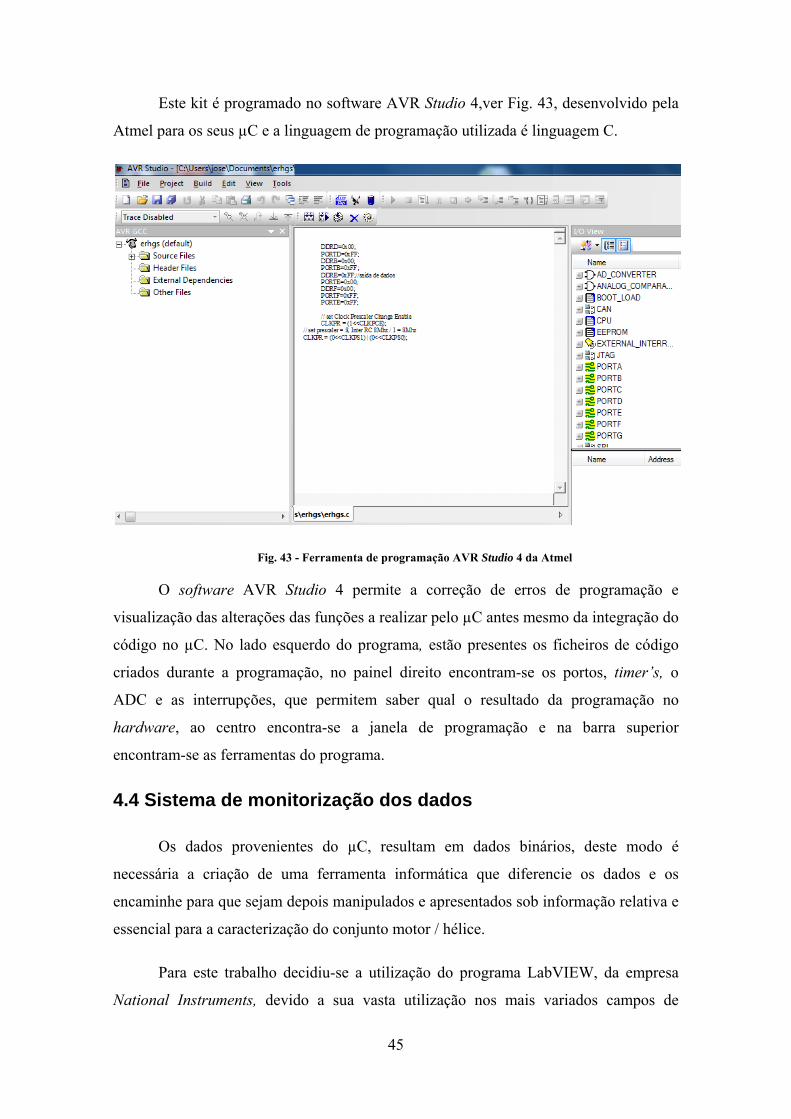
45
Este kit é programado no software AVR Studio 4,ver Fig. 43, desenvolvido pela
Atmel para os seus µC e a linguagem de programação utilizada é linguagem C.
Fig. 43 - Ferramenta de programação AVR Studio 4 da Atmel
O software AVR Studio 4 permite a correção de erros de programação e
visualização das alterações das funções a realizar pelo µC antes mesmo da integração do
código no µC. No lado esquerdo do programa, estão presentes os ficheiros de código
criados durante a programação, no painel direito encontram-se os portos, timer’s, o
ADC e as interrupções, que permitem saber qual o resultado da programação no
hardware, ao centro encontra-se a janela de programação e na barra superior
encontram-se as ferramentas do programa.
4.4 Sistema de monitorização dos dados
Os dados provenientes do µC, resultam em dados binários, deste modo é
necessária a criação de uma ferramenta informática que diferencie os dados e os
encaminhe para que sejam depois manipulados e apresentados sob informação relativa e
essencial para a caracterização do conjunto motor / hélice.
Para este trabalho decidiu-se a utilização do programa LabVIEW, da empresa
National Instruments, devido a sua vasta utilização nos mais variados campos de

46
investigação e trabalho, mas também porque a sua programação é simples e intuitiva,
permitindo assim ao comum utilizador uma fácil utilização e manipulação do programa.
O LabVIEW possui uma linguagem de programação, designada por linguagem
G, o “G” provém de está linguagem ser maioritariamente gráfica, isto é, possui blocos
intuitivos de programação gráfica que são interligados por fios, ver Fig. 44, fazendo
com que a programação se assemelhe a fluxogramas, a programação é feita de acordo
com o modelo de fluxo de dados, o que oferece a esta linguagem vantagens para a
aquisição de dados e para a sua manipulação.
Fig. 44 - Programação gráfica
Os programas em LabVIEW, são normalmente denominados, VI (acrónimo do
inglês Virtual Instruments). Cada VI é constituído por duas partes principais que
interagem entre si: o Front Panel e o Block Diagram, cada um com o seu bloco de
ferramentas próprias.
O Front Panel, ver Fig. 45, é o “rosto” do programa, nesta parte processa-se a
visualização dos dados, isto é, representa o programa com o qual o utilizador vai
interagir durante os ensaios ao conjunto motor / hélice. Este é construído de acordo com
os desígnios pretendidos, permitindo a introdução de botões de controlo, interruptores,
indicadores, gráficos e outros. É de referir também que estes controlos quando inseridos
no Front Panel são incluídos no Block Diagram, para que sejam conectados através de
fios.
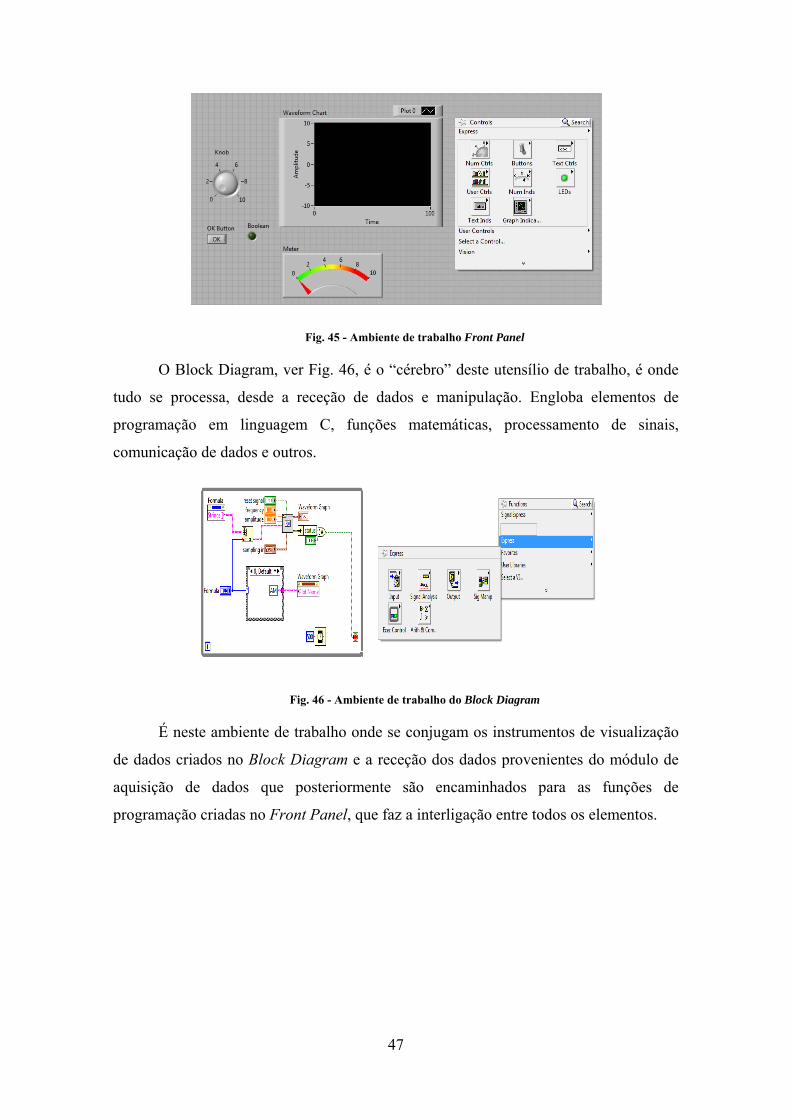
47
Fig. 45 - Ambiente de trabalho Front Panel
O Block Diagram, ver Fig. 46, é o “cérebro” deste utensílio de trabalho, é onde
tudo se processa, desde a receção de dados e manipulação. Engloba elementos de
programação em linguagem C, funções matemáticas, processamento de sinais,
comunicação de dados e outros.
Fig. 46 - Ambiente de trabalho do Block Diagram
É neste ambiente de trabalho onde se conjugam os instrumentos de visualização
de dados criados no Block Diagram e a receção dos dados provenientes do módulo de
aquisição de dados que posteriormente são encaminhados para as funções de
programação criadas no Front Panel, que faz a interligação entre todos os elementos.

48

49
5 Desenvolvimento e implementação do banco de ensaios
Com o objetivo de desenvolver um projeto, que respondesse ao desafio proposto,
procurou-se implementar um projeto simples e eficaz. Foi a reunião de várias partes
individuais e interligação dos vários dispositivos, que nos possibilita alcançar o
resultado esperado. De seguida dá-se a conhecer o trabalho efetuado para a obtenção
dos dados, para tal indica-se as saídas dos sensores a conectar às entradas específicas do
µC, configuração do módulo de aquisição de dados e por último o módulo de
manipulação e monitorização de dados com que o utilizador irá realizar os ensaios.
5.1 Esquemático geral de ligação
O esquemático observado na Fig. 47, esclarece como todos sensores, placa de
acondicionamento e monitorização se interligam.
Fig. 47 - Esquemático geral de ligação: 1 – sensor de velocidade; 2 – célula de carga; 3 – sensor de tensão; 4 – sensor de corrente; 5 – microcontrolador; 6 – computador de visualização do ensaio
Realça-se que não está presente no esquemático o controlador eletrónico de
velocidade, esta ausência deve-se que nenhum parâmetro será obtido diretamente deste
componente.

50
5.2 Medição dos parâmetros
A medição da tensão e da corrente foi efetuada de acordo com o descrito nos
subcapítulos 4.2.1 e 4.2.2, os parâmetros posteriormente são encaminhados para o
módulo de aquisição de dados, através dos pinos do µC referentes a entrada dos portos
ADC3 e ADC4, ver Fig. 48, para serem processados para informação digital.
Fig. 48 - Integração dos sensores de leitura da tensão e corrente com o µC: ADC3,ADC4 – conversor analógico digital 3 e 4
Estas duas leituras não necessitam de serem ligadas ao A.I. porque a sua saída
em tensão está na mesma ordem de grandeza que a ordem de tensão de leitura do ADC.
A leitura da velocidade é realizada através do emissor e recetor de
infravermelhos como descrito anteriormente, este terá que ler a velocidade do veio do
motor ou do hélice, através de um refletor que um destes terá. O recetor de
infravermelhos está ligado a um porto do µC responsável por produzir uma interrupção
externa (INT0), ver Fig. 49, contando o número interrupções, num intervalo de tempo
calcula-se o número de rotações. Fazendo cálculos simples teremos a velocidade do
motor em rotações por minuto (rpm).
Fig. 49 - Integração do recetor de velocidade com o µC: Vcc – tensão coletor comum; INT0 – interrupção externa 0, adaptado de [21]

51
A medição da tração e binário é realizado através da célula de carga, para que o
sinal de saída da célula de carga esteja na grandeza de leitura permitida pelo µC
necessita do A.I., deste modo procedeu-se a realização de uma placa de circuito
impresso para esse efeito que está representado no esquemático, ver Fig. 50, este foi
projetado no programa EAGLE.
Fig. 50 - Esquemático amplificador de instrumentação: ADC0, ADC1 – conversor analógico digital 1 e 2; IC1,IC2 – circuito integrado 1 e 2; R3,R4 – resistência; R1,R2 – potenciómetro; V+, V- - entradas de tensão;
É de realçar a existência de duas saídas que serão conectadas ao µC mais
precisamente ao ADC0 e ADC1. Posteriormente este esquemático foi projetado e
montado numa placa breadboard como se pode observar na Fig. 51
Fig. 51 - Montagem em placa breadboard do amplificador de instrumentação

52
5.3 Configurações do µC
Para que o microcontrolador cumpra a sua função de aquisição de dados, este
precisa de ser programado. De seguida apresentam-se quais as funções e parâmetros
programados no µC, através de extratos do programa desenvolvido, este encontra-se
completo no Anexo A.
Configuração dos portos: a configuração dos portos é um elemento
fundamental no µC, devido a existência de funções extras que os estes comportam
(configuração do timer, configuração da interrupção externa, configuração do ADC). De
seguida apresenta-se a definição dos portos só como função de entrada de dados.
DDRB=0x00; //entrada de dados PORTB=0xFF; //porto em nível alto
Configuração da interrupção externa: para configurar a interrupção
externa primeiramente temos que definir qual o porto associado a interrupção.
Posteriormente ativa-se a interrupção e depois define-se a rotina associada para que está
desempenhe a sua função (calculo da velocidade), a ativação e a rotina associada a
interrupção externa é a seguinte:
EICRA =(1<<ISC01)|(0<<ISC00); // Na interrupção INT0, uma transição para um nível 0 origina a interrupção EIMSK =(1<<INT0); // Ativa interrupção ISR(INT0_vect) // Rotina da Interrupção externa 0
Configuração do timer: para o cálculo da velocidade é necessário ter
uma base de tempo predefinida, assim configurou-se esta função para executar o tempo
de 1s, voltando a seguir ao seu estado de inicial. Quando o tempo programado termina,
a rotina associada ao timer, ativa o ADC e envia para o computador os dados recolhidos
dos sensores.
int tempo() //Função de configuração do timer e interrupção associada ISR(TIMER1_OVF_vect) //rotina de serviço a interrupção do timer 1 por overflow,

53
//start ADC //envio de dados
Configuração do ADC: é um passo importante porque é através deste
dispositivo, que os dados passam de sinal analógico para sinal digital. Inicialmente é
preciso selecionar o porto a ler e qual a tensão de referência a utilizar para a conversão.
Dentro da rotina configura-se a formatação do valor digital, seguidamente é realizado
uma leitura dummy, como forma de eliminar qualquer valor residual e por último a
função de conversão do valor analógico no porto para valor digital.
ADC_read(0); // Start leitura do ADC0 void ADC_read(U8 input) //rotina de serviço a conversão do ADC
//configuração do ADC left adjust //do a dummy read first //start read ADC
Configuração do envio de dados: o envio de dados é feito através da
porta USB do µC, a configuração presente no código é um template cedido pela
ATMEL, que se encontra em [30], facilitando assim todo o processo de codificação da
porta série. Deste modo foi apenas necessário acrescentar uma função que permite
enviar os dados de cada um dos sensores através da porta USB, também permite a
receção de dados tornando assim possível o arranque do programa quando o utilizador
assim o entender.
uart_usb_putchar(F0); uart_usb_putchar(d_b1); //envio do byte mais significativo uart_usb_putchar(d_b2); //envio do byte menos significativo
Para que seja mais fácil a compreensão de todas as configurações descritas
anteriormente e a relação entre estas, apresenta-se a seguir um fluxograma, ver Fig. 52,
que representa todo o código desenvolvido.

54
Fig. 52 - Fluxograma do programa implementado no µC
De forma a melhorar a utilização, manutenção e simplicidade de ligação dos
conectores dos sensores no µC, foi necessário a construção de uma placa de expansão
que se apresenta na Fig. 53.
Fig. 53 - Placa de expansão do µC

55
Com esta placa de circuito impresso (PCB, acrónimo do inglês printed circuit
board), todos os portos estão disponíveis, tornando o µC mais fácil de manusear.
5.4 Configurações do LabVIEW
O ambiente gráfico desenvolvido no programa LabVIEW tem como principal
requisito ser um ambiente de fácil compreensão, fácil manutenção e que permita o
armazenamento dados para posterior análise mais pormenorizada. Em seguida irá ser
apresentado partes da configuração do programa construído na plataforma LabVIEW,
para a visualização de todo o programa ver Anexo B.
Configuração da porta série: o modo de transmissão configurado no
LabVIEW foi realizado de modo a que este estivesse de acordo com a configuração
praticada no µC, obedecendo aos seguintes parâmetros: velocidade de transmissão
(baud rate) = 9600 bits/s; tamanho da trama = 8 bits; bit de paridade = 0; stop bit =1, ver
Fig. 54.
Fig. 54 - Configuração da porta série no LabVIEW
Os blocos gráficos VISA Write e VISA Read, são funções encarregadas pela
escrita e leitura da porta série. Estas funções estão condicionadas por duas variáveis
booleanas, Enable Write e Enable Read, que são iniciadas a 1, ver Fig. 55.

56
Fig. 55 - Escrita e leitura na porta série pelo LabVIEW
Manipulação de dados: como forma de distinção dos dados, foi criado
no µC uma formatação própria de envio de dados, deste modo identificava-se o tipo de
dado e de seguida o valor, por exemplo, XYmsbYlsb, em que:
X, nome do sensor lido, byte1
Ymsb, byte mais significativo, byte2
Ylsb, byte menos significativo, byte3
Assim os 14 bytes (A0Y, F0 Ymsb Ylsb, F1 Ymsb Ylsb, F2 Ymsb Ylsb, F3 Ymsb Ylsb )
recebidos na porta série são manipulados e encaminhados para os diferentes
instrumentos de visualização transformando-se em informação com sentido para o
utilizador. Deste modo em primeiro lugar são enviados os dados pertencentes a
velocidade, tração, binário, a corrente e tensão.
Os valores recebidos necessitam de ser convertidos em valores decimais, a
conversão é realizada através da transição do byte para um vetor numérico, por
exemplo: byte “2” corresponde a “F0” (tração), o valor do byte “3” é multiplicado por
256, e a este resultado é somado ao valor do byte “4”, obtendo-se no final um valor
inteiro entre 0 e 1023, ver Fig. 56.
Este valor inteiro ainda não corresponde ao valor de tensão lido pelo µC para tal
aplica-se a expressão matemática (15) e retira-se Vin, o que corresponde ao valor de
tensão lido pelo ADC do µC.

57
Fig. 56 - Leitura e manipulação dos bytes recebidos na porta série.
Armazenamento de dados: para guardar os dados provenientes dos
ensaios foi pedido que estes valores fossem guardados no formato Excel para que
fossem posteriormente analisados com mais pormenor. Para cumprir esse requisito foi
criado um código com esse intuito que se pode observar na Fig. 57.
Fig. 57 – Código para armazenamento dos dados em formato Excel

58
Ambiente de monitorização gráfica do utilizador: pretendia-se no
início do projeto que o ambiente trabalho desenvolvido em LabVIEW fosse o mais
simples e intuitivo possível sem que isso compromete-se a visualização e
armazenamento dos parâmetros durante os ensaios ao conjunto motor / hélice. Assim
em seguida apresentam-se algumas janelas de interação para o utilizador mostrando o
trabalho gráfico desenvolvido.
Assim a primeira função que o utilizador tem que cumprir após iniciar o
programa, ver Fig. 58, é indicar o caminho para onde quer que sejam guardados os
dados. De seguida o utilizador precisa de escolher entre fazer um teste estático, ou um
teste dinâmico ao conjunto motor / hélice.
Fig. 58 - Rosto do programa desenvolvido em LabVIEW
Consoante a escolha do utilizador, aparece uma janela, Fig. 59, onde é possível
observar os dados de duas formas: num gráfico (secção A), para que o utilizador possa
acompanhar a evolução dos parâmetros ao longo do tempo, e também seguir qual o
valor atual, máximo e o mínimo (secção B) de cada um dos parâmetros.

59
Fig. 59 - Janela de monitorização dos dados
Para que o declínio de tensão da bateria não prejudique o ensaio, colocou-se um
indicador do valor de tensão lido pelo µC para que este parâmetro esteja sempre
monitorizado.
Realça-se nesta janela a existência de mais dois botões (secção C), um possui a
função de parar o programa de imediato e o outro serve para aceder à janela de
visualização dos dados provenientes da porta série. Nesta última janela pode-se ver os
dados a chegar em formato de string, o seu fracionamento e manipulação individual dos
dados, ver Fig. 60.
Fig. 60 - Janela de verificação do programa desenvolvido em LabVIEW
Secção A Secção B
Secção C

60
5.5 Sumário dos desenvolvimentos
O banco de ensaios descrito anteriormente apresenta um sistema capaz de medir
dois eixos em simultâneo e respetivos momentos (tração e binário), tensão, corrente e
velocidade do hélice. Estes dados são indispensáveis para a caracterização do conjunto
motor / hélice.
A construção deste sistema eletrónico para obtenção de dados do conjunto
permite uma maior certeza dos dados recolhidos, evita a necessidade do emprego de
várias pessoas para levarem a cabo um ensaio e permite a poupança de tempo entre
testes. As características do sistema de propulsão a serem estudados serão obtidas após
os primeiros ensaios, deste modo teremos acesso aos valores máximos de binário e
tração o que permite a escolha da gama correta de hélices para serem estudados com o
banco de testes aqui descrito.

61
6 Análise e discussão dos resultados
A realização dos testes seguintes servirão para caracterizar a curva de calibração
da célula de carga no eixo Fz-1, mais precisamente o parâmetro compressão. Assim em
primeiro lugar apresentam-se os testes produzidos pelo fabricante da célula de carga
para todos os eixos que a célula de carga consegue medir, em seguida os testes
realizados e observados num multímetro digital e por último os testes efetuados e
monitorizados na plataforma LabVIEW. Por último retiram-se ilações sobre os
diferentes tipos de resultados adquiridos.
6.1 Testes de calibração da célula de carga realizados pela FUTEKTM
A célula de carga adquirida foi calibrada pelo fabricante e os dados dessa
calibração são importantes para a previsão do comportamento da célula de carga, o que
nos possibilita uma antevisão sobre os dados que iremos obter na realização dos
ensaios, para mais informação sobre estes dados, os certificados da calibração
apresentam-se no Anexo C.
As condições iniciais a que foram realizados os testes no fabricante são os
seguintes para a calibração do eixo Fz-1 (tração e compressão):
• Tensão de excitação da célula de carga = 10.01 Vdc
• Resistência de entrada = 397 Ω
• Resistência de saída = 355 Ω
• Tensão a saída sem carga = -0,0043 mV/V
Em seguida apresentam-se os dados recolhidos pela FUTEKTM, os dados serão
apresentados em formato de tabela para obtermos os valores fixos para massas padrão e
em gráficos para observamos a evolução ao longo do tempo. Para a mudança das
massas da grandeza libra para quilograma foi utilizada a seguinte conversão: 1lb =
0.45359237 kg e 1 lb.in = 0,112984829 N.m [31].

62
Tabela 3 - Calibração da célula de carga - Tração
Carga (lb‐kgf) Output lb (libra) kgf (quilograma.força) (mV/V)
0 0 0,0000 10 4,5359237 0,3786
20 9,0718474 0,7566 30 13,6077711 1,1340 40 18,1436948 1,5124 50 22,6796185 1,8903 0 0 0,0004
Gráfico 1 - Calibração da Tração
Tabela 4 - Calibração da célula de carga - Compressão
Carga (lb‐kgf) Output lb (libra) kgf (quilograma.força) (mV/V)
0 0 0,0000 10 4,5359237 ‐0,3810
20 9,0718474 ‐0,7627 30 13,6077711 ‐1,1450 40 18,1436948 ‐1,5281 50 22,6796185 ‐1,9117 0 0 0,0010
y = 0,083x + 0,000R² = 1
0,00000,20000,40000,60000,80001,00001,20001,40001,60001,80002,0000
0 5 10 15 20 25
Tensão
de saída
Carga aplicada

63
Gráfico 2 - Calibração da Compressão
Para a realização do teste de calibração do eixo Mz-1 (binário), as condições
iniciais foram as seguintes:
• Tensão de excitação da célula de carga = 9.99 Vdc
• Resistência de entrada = 398 Ω
• Resistência de saída = 355 Ω
• Tensão a saída sem carga = -0,0010 mV/V
Tabela 5 - Calibração da célula de carga – binário no sentido dos ponteiros do relógio
Carga (lb.in‐N.m) Output lb.in (libra.polega) N.m (Newton.metro) (mV/V)
0 0 0,000010 1,12984829 0,352220 2,25969658 0,704530 3,38954487 1,056940 4,51939316 1,409550 5,64924145 1,7628
0 0 0,0010
y = ‐0,084x + 0,001R² = 1
‐2,5000
‐2,0000
‐1,5000
‐1,0000
‐0,5000
0,0000
0,5000
0 5 10 15 20 25
tensão
de saída
carga aplicada

64
Gráfico 3 - Calibração do binário - sentido dos ponteiros do relógio
Tabela 6 - Calibração da célula de carga - binário no sentido contrário dos ponteiros do relógio
Carga (lb.in‐N.m) Output lb.in (libra.polegada) N.m (Newton.metro) (mV/V)
0 0 0,0000 10 1,12984829 ‐0,3439 20 2,25969658 ‐0,6880 30 3,38954487 ‐1,0322 40 4,51939316 ‐1,3755 50 5,64924145 ‐1,7191 0 0 ‐0,0013
Gráfico 4 - Calibração do binário - sentido contrário dos ponteiros do relógio
y = 0,311x + 0,000R² = 1
0,0000
0,5000
1,0000
1,5000
2,0000
0 1 2 3 4 5 6
Tensão
de saída
Carga aplicada
Título do Gráfico
y = ‐0,304x ‐ 0,000R² = 1
‐2,0000
‐1,5000
‐1,0000
‐0,5000
0,0000
0 1 2 3 4 5 6
Tensão
de saída
Carga aplicada
Título do Gráfico
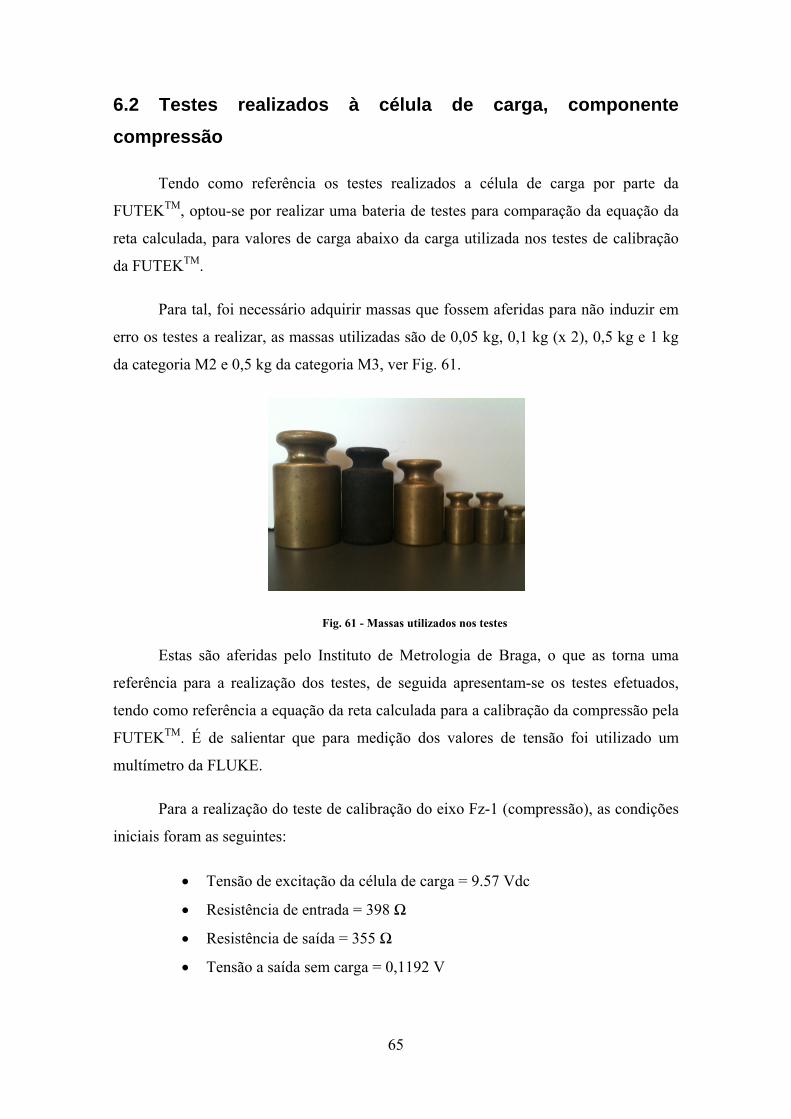
65
6.2 Testes realizados à célula de carga, componente compressão
Tendo como referência os testes realizados a célula de carga por parte da
FUTEKTM, optou-se por realizar uma bateria de testes para comparação da equação da
reta calculada, para valores de carga abaixo da carga utilizada nos testes de calibração
da FUTEKTM.
Para tal, foi necessário adquirir massas que fossem aferidas para não induzir em
erro os testes a realizar, as massas utilizadas são de 0,05 kg, 0,1 kg (x 2), 0,5 kg e 1 kg
da categoria M2 e 0,5 kg da categoria M3, ver Fig. 61.
Fig. 61 - Massas utilizados nos testes
Estas são aferidas pelo Instituto de Metrologia de Braga, o que as torna uma
referência para a realização dos testes, de seguida apresentam-se os testes efetuados,
tendo como referência a equação da reta calculada para a calibração da compressão pela
FUTEKTM. É de salientar que para medição dos valores de tensão foi utilizado um
multímetro da FLUKE.
Para a realização do teste de calibração do eixo Fz-1 (compressão), as condições
iniciais foram as seguintes:
• Tensão de excitação da célula de carga = 9.57 Vdc
• Resistência de entrada = 398 Ω
• Resistência de saída = 355 Ω
• Tensão a saída sem carga = 0,1192 V

66
Para uma massa aplicada de 0,05 kg
A tensão de saída para 0,05 kg é de 0.1224 V, como se pode ver na Fig. 62,
subtraindo o valor de tensão sem carga (0,1192 V), dá um valor de tensão de 0,0032 V.
Fig. 62 - Teste com massa de 0,05 kg
Através da equação reta calculada pelos dados da FUTEKTM para a compressão
obtemos:
y ‐0,0843 0,05 0,0011 (17)
y -0,0031 V (18)
Tabela 7 - Resultado do teste monitorizado no multímetro para 0,05 kg
Valor de tensão real Valor de tensão teórico
y = -0,0843x + 0,0011
Desvio
-0,0032 -0,0031 0,0001 3,2%
Para uma massa aplicada = 0,1 kg
O valor de tensão observado no multímetro é de 0,1259 V.

67
Tabela 8 - Resultado do teste monitorizado no multímetro para 0,1 kg
Valor de tensão real Valor de tensão teórico
y = -0,0843x + 0,0011
Desvio
-0,0068 -0,007 0,0002 2,9%
Para uma massa aplicada de 0,2 kg
O valor de tensão observado no multímetro é de 0,1335 V.
Tabela 9 - Resultado do teste monitorizado no multímetro para 0,2 kg
Valor de tensão real Valor de tensão teórico
y = -0,0843x + 0,0011
Desvio
-0,0143 -0,016 0,0017 10,8%
Para uma massa aplicada de 0,5 kg
O valor de tensão observado no multímetro é de 0,1551 V.
Tabela 10 - Resultado do teste monitorizado no multímetro para 0,5 kg
Valor de tensão real Valor de tensão teórico
y = -0,0843x + 0,0011
Desvio
-0,0359 -0,041 0,0051 12,4%
Para uma massa aplicada de 1 kg
O valor de tensão observado no multímetro é de 0,1911 V.

68
Tabela 11 - Resultado do teste monitorizado no multímetro para 1 kg
Valor de tensão real Valor de tensão teórico
y = -0,0843x + 0,0011
Desvio
-0,0719 -0,083 0,0111 13,4%
6.2.1 Resumo dos testes observados no multímetro Seguidamente apresenta-se a Tabela 12, que apresenta a comparação dos dados
obtidos pela FUTEKTM e os dados “práticos” obtidos nas condições laboratoriais
presentes, expõe também os desvios entre estes para que se possa quantificar o erro
produzido.
Tabela 12 - Sumário dos testes monitorizados no multímetro
Carga aplicada kg Tensão de saída teórica Tensão de saída prática Desvio %0,05 ‐0,003115 ‐0,0032 2,72%0,1 ‐0,00733 ‐0,0068 2,90%0,2 ‐0,01576 ‐0,0143 10,90%0,5 ‐0,04105 ‐0,0359 12,40%
1 ‐0,0832 ‐0,0719 13,40%
Gráfico 5 - Tensão de saída teórica vs Tensão de saída prática monitorizada no multímetro
No Gráfico 5, observa-se que a tensão de saída teórica é ligeiramente superior a
tensão de saída prática, esse desvio deve-se a vários fatores, tais como a tensão de
alimentação da célula de carga menor do que a utilizada nos testes da FUTEKTM,
‐0,09
‐0,08
‐0,07
‐0,06
‐0,05
‐0,04
‐0,03
‐0,02
‐0,01
0
0 0,2 0,4 0,6 0,8 1 1,2
Tensão
de saída
Carga aplicadaDados teóricos
Dados práticos

69
posicionamento das massas na célula de carga, possível inclinação da mesa de testes,
temperatura ambiente e radiação eletromagnética, todos estes fatores quando somados
contribuem para a medição dos resultados recolhidos. É de mencionar também a
incerteza dos resultados obtidos, devido a erros sistemáticos e instabilidade dos valores
ao longo do tempo.
6.2.2 Visualização dos testes em LabVIEW
Para a visualização dos testes no ambiente gráfico desenvolvido em LabVIEW,
foi necessário além do descrito no subcapítulo 4.5.3 manipular os dados. Após a
conversão dos bytes em valores inteiros que vão desde 0 a 1023, foi necessário
transformar este valor em tensão, ver
Fig. 63.
Fig. 63 - Conversão dos dados para valores de tensão no LabVIEW: tensão offset – tensão lida pela célula de carga em vazio.
Como ilustrado, foi aplicado a equação (15), cujo valor calculado a multiplicar
está representado na figura por (1), de seguida é efetuado a subtração pela tensão offset
representado na figura por (2), que representa a tensão que a célula de carga fornece em
vazio.
A tensão offset não é fixa, como tal é fundamental retirar uma amostra da tensão
presente no ADC antes de se realizar os ensaios. Esta variável é posteriormente
atualizada automaticamente no programa em LabVIEW, a programação produzida para
esse efeito afigura-se na Fig. 64.

70
Fig. 64 - Programação para o cálculo da tensão offset
Em seguida apresentam-se os testes efetuados monitorizados em LabVIEW com
as mesmas condições iniciais apresentadas anteriormente e também com as mesmas
massas já utilizadas.
No final dos testes faz-se a comparação entre os resultados observados no
multímetro, os dados monitorizados em LabVIEW e os dados de calibração efetuados
pela FUTEKTM, para os podermos relacionar e prever o seu comportamento futuro.
Para uma massa aplicada de 0,05 kg
O valor de tensão observado no LabVIEW é de -0,0025 V, que está realçado na
Fig. 65.

71
Fig. 65 - Valor monitorizado para uma carga de 0,05Kg
Este valor é apenas uma amostra, não reflete a tensão de saída média para a
massa de 0,05 kg, deste modo, através do armazenamento dos dados guardados pelo
LabVIEW em formato Excel, obtém-se uma média e um desvio padrão dos dados
recolhidos, ver Tabela 13.
Tabela 13 - Resultados obtidos em LabVIEW para uma massa de 0,05 kg
Média ‐0,00253
Desvio Padrão 0,005673
Média + Desvio Padrão 0,003139
Para uma massa aplicada de 0,1 kg
Tabela 14 - Resultados obtidos em LabVIEW para uma massa de 0,1 kg
Média 0,001976
Desvio Padrão 0,004595
Média + Desvio Padrão 0,006572
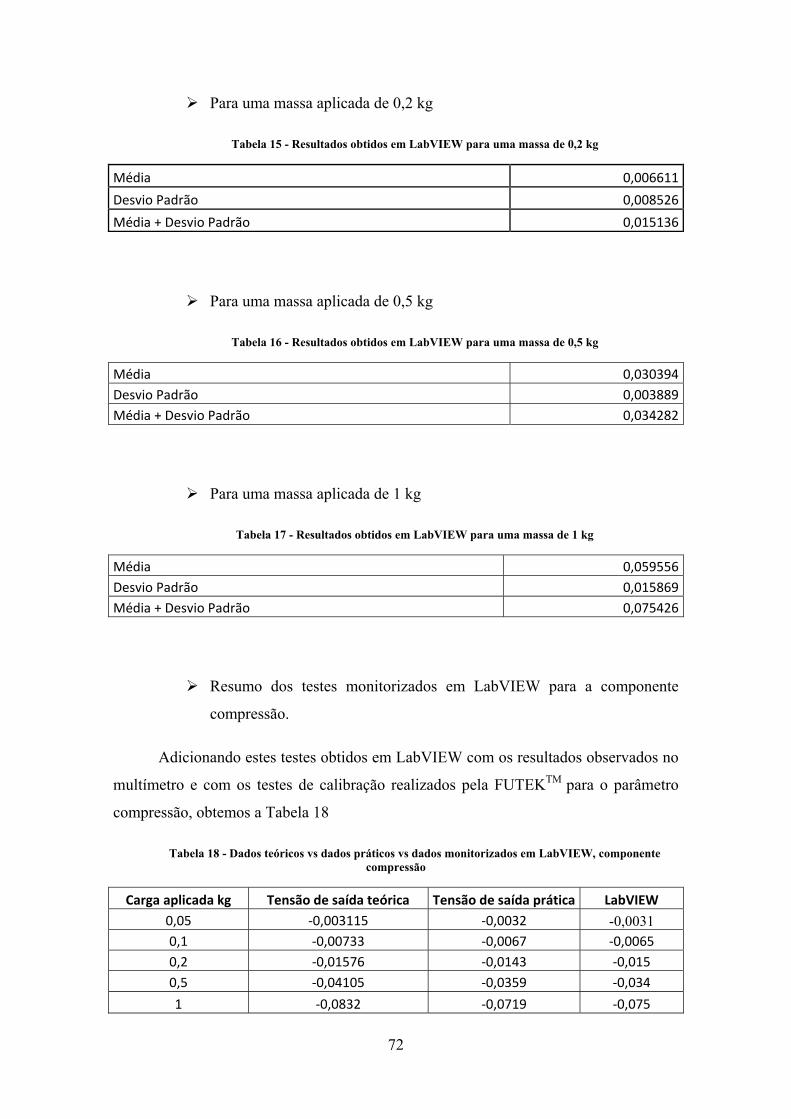
72
Para uma massa aplicada de 0,2 kg
Tabela 15 - Resultados obtidos em LabVIEW para uma massa de 0,2 kg
Média 0,006611
Desvio Padrão 0,008526
Média + Desvio Padrão 0,015136
Para uma massa aplicada de 0,5 kg
Tabela 16 - Resultados obtidos em LabVIEW para uma massa de 0,5 kg
Média 0,030394Desvio Padrão 0,003889Média + Desvio Padrão 0,034282
Para uma massa aplicada de 1 kg
Tabela 17 - Resultados obtidos em LabVIEW para uma massa de 1 kg
Média 0,059556Desvio Padrão 0,015869Média + Desvio Padrão 0,075426
Resumo dos testes monitorizados em LabVIEW para a componente
compressão.
Adicionando estes testes obtidos em LabVIEW com os resultados observados no
multímetro e com os testes de calibração realizados pela FUTEKTM para o parâmetro
compressão, obtemos a Tabela 18
Tabela 18 - Dados teóricos vs dados práticos vs dados monitorizados em LabVIEW, componente compressão
Carga aplicada kg Tensão de saída teórica Tensão de saída prática LabVIEW0,05 ‐0,003115 ‐0,0032 -0,00310,1 ‐0,00733 ‐0,0067 ‐0,00650,2 ‐0,01576 ‐0,0143 ‐0,015 0,5 ‐0,04105 ‐0,0359 ‐0,034 1 ‐0,0832 ‐0,0719 ‐0,075

73
Gráfico 6 - Comparação entre dados teóricos com dados práticos e dados monitorizados em LabVIEW, para a componente compressão
Os dados recolhidos através do LabVIEW adotam a mesma reta que os dados
verificados com o multímetro, significando que a conversão do ADC do µC esta a
funcionar dentro do esperado e a manipulação dos dados em LabVIEW reflete o
resultado obtido. De referir também o ligeiro desvio verificado no valor final, este deve-
se principalmente ao erro de quantização.
O erro de quantização provém do erro de leitura do ADC do µC e corresponde ao
erro da passagem de um sinal analógico para sinal digital, tomemos por exemplo a
transição de uma onda sinusoidal para digital, ver Fig. 66
‐0,09
‐0,08
‐0,07
‐0,06
‐0,05
‐0,04
‐0,03
‐0,02
‐0,01
0
0 0,2 0,4 0,6 0,8 1 1,2
Tensão
de saída
Carga aplicada Dados FUTEK
Dados práticos
Dados LabVIEW

74
Fig. 66 - Erro de quantização [32]
Podemos observar que o sinal digital deixou de ser um sinal sinusoidal e passou
a ser um sinal característico dente de serra, perdendo informação do sinal analógico,
entre o salto de um nível de tensão para o outro. É de realçar que o erro é maior quando
a tensão a medir esta próxima de Vmin, quando a tensão atinge o seu Vmax o erro é quase
nulo. Esta informação é importante porque a tensão obtida da célula de carga nos testes
anteriormente realizados é na ordem das centésimas.
6.3 Testes realizados à célula de carga, componente tração
Tendo como referência os testes realizados a célula de carga por parte da
FUTEKTM para o parâmetro tração, optou-se também por realizar testes para
comparação com a equação da reta calculada, para valores de carga abaixo da carga
utilizada nos testes de calibração da FUTEKTM.
Para a realização do teste de calibração do eixo Fz-1 (tração), as condições
iniciais foram as seguintes:
• Tensão de excitação da célula de carga = 9.559 Vdc
• Resistência de entrada = 398 Ω
• Resistência de saída = 355 Ω
• Tensão a saída sem carga = 0,1111 V

75
Assim seguidamente dá-se a conhecer para cada uma das massas padrão
utilizadas, primeiramente o resultado em tensão observado no multímetro e depois o
resultado obtido em LabVIEW para o parâmetro tração
No final dos testes realizados para a calibração da tração faz-se a sobreposição
entre os dois sistemas de obtenção de dados (multímetro e LabVIEW) como forma de
comparação e evolução dos dados recolhidos.
Para uma massa aplicada de 0,05 kg
Valor observado no multímetro, 0.0039 V
Tabela 19 - Resultado obtido em LabVIEW para uma carga de 0,05 kg
Média 0,000969Desvio Padrão 0,002968Média + Desvio Padrão 0,003937
Para uma massa aplicada de 0,1 kg
Valor observado no multímetro, 0.0072 V
Tabela 20 - Resultado obtido em LabVIEW para uma carga de 0,1 kg
Média 0,003154Desvio Padrão 0,004745Média + Desvio Padrão 0,007899
Para uma massa aplicada de 0,5 kg
Valor observado no multímetro, 0.035 V
Tabela 21 - Resultado obtido em LabVIEW para uma massa de 0,5 kg
Média 0,033981Desvio Padrão 0,005244Média + Desvio Padrão 0,039225
Para uma massa aplicada de 1 kg
Valor observado no multímetro, 0.07 V

76
Tabela 22 - Resultado obtido em LabVIEW para uma massa de 1 kg
Média 0,055857Desvio Padrão 0,015556Média + Desvio Padrão 0,071413
Sumário dos testes monitorizados em LabVIEW para a componente
tração.
Tabela 23 - Dados teóricos vs dados práticos vs dados monitorizados em LabVIEW, componente tração
Carga aplicada kg Tensão de saída teórica Tensão de saída prática LabVIEW 0,05 0,004465 0,0039 0,0039 0,1 0,00863 0,0072 0,0078 0,5 0,04195 0,035 0,039 1 0,0836 0,07 0,071
Gráfico 7 - Comparação entre dados teóricos com dados práticos e dados monitorizados em LabVIEW, para a componente tração
Através do Gráfico 7, pode-se observar que os resultados obtidos em LabVIEW
vão de encontro com os dados visualizados no multímetro com um ligeiro desvio. Esse
desvio deve-se ao facto de a tensão medida se encontrar muito próxima dos 0 V onde o
erro de quantização do ADC é maior.
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0 0,2 0,4 0,6 0,8 1 1,2
Tensão
de saída
Carga aplicadaDados Futek
Dados Multimetro
Dados LabVIEW

77
7 Conclusão
7.1 Sumário
A realização deste trabalho necessitou primeiramente da identificação de todas
as variáveis a medir bem como os instrumentos necessários para cada parâmetro de
leitura. Deste modo foi adquirido uma célula de carga da FUTEKTM capaz de efetuar
leituras da tração e binário no mesmo eixo, um emissor e recetor de infravermelhos da
Honeywell, um amplificador de instrumentação da Burr Brown, para amplificação dos
sinais provenientes da célula de carga, um microcontrolador da ATMEL para a
aquisição dos diferentes sinais e foi utilizado um software LabVIEW da Nationals
Instruments para a manipulação, visualização e armazenamento dos dados referentes
aos testes efetuados. É importante referir que foi efetuado um estudo pormenorizado de
todos os componentes e software utilizados para que a sua compreensão, aplicação e
manutenção fossem de acordo com as suas especificações e desígnios da construção do
banco de ensaio.
Através destes componentes foi construído, uma placa em breadboard para
acolher o amplificador de instrumentação, uma placa de expansão para receber o
microcontrolador e facilitar a conexão deste com os sensores, foi desenvolvido um
código em linguagem C para atribuir funções de operação ao microcontrolador e por
último foi implementado um programa em LabVIEW para a visualização dos ensaios.
De acrescentar também que as tensões requeridas pelos componentes eletronicos foram
obtidas através de uma fonte de alimentação de um computador de secretaria.
7.2 Conclusões
A etapa da construção do banco de ensaios foi apresentada, este foi de baixo de
custo de desenvolvimento e foi interessante de implementar. A eletrónica e o software
de leitura utilizando a placa de aquisição permitem a utilização deste banco de ensaios
em ambientes laboratoriais, onde as condições de regime de voo do conjunto motor /
hélice podem ser simuladas.
Os resultados obtidos foram satisfatórios com respeito à resposta da placa de
aquisição de dados e a resposta do programa desenvolvido. Ao se realizarem os testes

78
com as diferentes massas padrão para a compressão e tração observou-se que a tensão
visualizada em LabVIEW corresponde aos valores observados no multímetro, isto
indicava que tanto a conversão dos sinais analógicos para digitais como a sua
manipulação estava de acordo com o esperado. Deste modo, as retas obtidas durante os
testes da compressão e tração irão ser utilizadas como retas de calibração da célula de
carga e serão referências para ensaios futuros.
De lamentar à não realização de testes de velocidade, binário, corrente e tensão,
esta falta de resultados deveu-se essencialmente a impossibilidade de montagem do
grupo propulsor e posterior integração com o banco de ensaios. Apesar deste ponto
menos bom, é de salientar que o grosso do trabalho já foi elaborado e que os restantes
testes de calibração não trazem qualquer dificuldade de execução.
7.3 Trabalhos futuros
O trabalho futuro será avançar para a construção da estrutura de suporte do grupo
propulsor, como está esquematizado no trabalho desenvolvido por Costa, C., H. et al.
[11], para que o conjunto motor / hélice esteja na sua posição natural de ensaio,
permitindo a realização de mais testes para uma melhor calibração da tração, do binário,
velocidade, corrente e tensão.
Para evitar erros nas medições será necessário construir uma caixa a prova de
radiações eletromagnéticas, para albergar o amplificador de instrumentação, o
microcontrolador e a fonte de alimentação, evitando assim interferências nestes
componentes e consequentes erros nos resultados obtidos. Também será essencial a
implementação de uma fonte de alimentação estável, a fonte de alimentação utilizada
nos testes possuí ligeiras flutuações de tensão.

79
8 Bibliografia
8.1 Bibliografia citada
[1] Predescu, M., Bejinariu, A., Nedelcu, A., Mitroi, O., Nae, C., Pricop,
M.V., Crăciunescu, A. "Wind Tunnel Assessment of Small Direct Drive Wind Turbines
with Permanent Magnets Synchronous Generators".
[2] Ghită, C., Deaconu, D. I., Chirilă, A. I., Năvrăpescu, V., Ilina, D. "Lab
Model for a Low Power Wind Turbine System".
[3] Brandt, J. "Small-Scale Propeller Performance at Low Speeds".
[4] Merchant, M. "Propeller Performance Measurement for Low Reynolds
Number Unmanned Aerial Vehicles Applications". 2004.
[5] http://e-
geo.ineti.pt/bds/lexico_hidro/lexico.aspx?Termo=N%u00famero+de+Reynolds.
[Online] setembro 2011.
[6] Kotwani, K, S.K. Sane. "Experimental Characterization of Propulsion
System for MAVs".
[7] Deters, R. W., Selig, M. S. "Static Testing of Micro Propellers". 2008.
[12] Costa, C., H., Lobarinhas, P., Silva, L., “Conceção de um sistema capaz de
avaliar o desempenho estático e dinâmico do conjunto motor-hélice para aplicação em
veículos remotamente pilotados” Universidade do Minho, Guimarães, 2009.
8.2 Outra bibliografia [10] Rodrigues, J.C. “Aeromodelismo Teórico e Prático”. 2004.
[13] Afonso, J.L. Apontamentos teóricos da disciplina de "Máquinas elétricas".
2007.
[14]
http://www.fpam.pt/Nacional/Formacao/TecNiv1/tn1007MotoresElectricosBaterias.pdf.
[Online] setembro 2011.

80
[17] http://www.prof2000.pt/users/afolhas/redox.htm. [Online] setembro 2011.
[19] http://www.infopedia.pt/$efeito-de-hall. [Online]
[20] http://www.datasheetcatalog.org/datasheets2/70/70473_2.pdf. [Online]
setembro de 2011.
[23] http://www.farnell.com/datasheets/625900.pdf. [Online] setembro de 2011.
[26] http://www.futek.com/product.aspx?stock=FSH00744. [Online] setembro de
2011.
[28] http://www.ti.com/lit/ds/symlink/ina114.pdf. [Online] setembro de 2011.
[29] ftp://ftp.efo.ru/pub/atmel/_C51_and_AVR_with_USB/starterkits/STK525-
USBKEY/Docs/doc7617.pdf. [Online] setembro de 2011.
[30]
http://www.avrfreaks.net/wiki/index.php/Documentation:Tutorials_gcc_AT90UsbKey
[Online] setembro de 2011
[31] http://www.convertunits.com/from/lbs/to/kg. [Online] outubro de 2011.
8.3 Web grafia [8] http://www.cap-ny153.org/forcesthrust.htm. [Online] setembro 2011.
[9] http://www.flightlearnings.com/forces-acting-on-the-aircraft-thrust/214/.
[Online] setembro 2011.
[11] http://jonal300.no.comunidades.net/index.php?pagina=1830074689
[Online] outubro de 2011
[15]
http://homepages.which.net/~paul.hills/SpeedControl/SpeedControllersBody.html.
[Online] setembro 2011.
[16] http://www.netrino.com/Embedded-Systems/How-To/PWM-Pulse-Width-
Modulation. [Online] setembro 2011.

81
[18] http://www.bhhelimodelismo.com/?p=159. [Online] setembro 2011.
[21] http://www.mecatronicaatual.com.br/secoes/leitura/438. [Online] outubro de
2011.
[22] http://www.minelab.com/emea/consumer/knowledge-base/terminology.
[Online] outubro de 2011.
[24] http://www.onixmetrologia.com.br/servicos/subservico/14. [Online] outubro
de 2011.
[25]
http://www.dec.fct.unl.pt/seccoes/S_Estruturas/Mecanica_Meios_Continuos/upgrade/I_
extensometria.pdf. [Online] outubro de 2011.
[27] https://woc.uc.pt/deec/getFile.do?tipo=2&id=2136. [Online] outubro de
2011.
[32] http://www.skillbank.co.uk/SignalConversion/quanterror.htm. [Online]
setembro de 2011.

82

I
Anexo A
Neste anexo está apenas apresentado o código que foi inserido no template já
existente, o resto dos ficheiros encontram-se em anexo digital
//! //! @file cdc_task.c,v //! //! Copyright (c) 2004 Atmel. //! //! Please read file license.txt for copyright notice. //! //! @brief This file manages the CDC task. //! //! //! @version 1.6 at90usb128-demo-cdc1_0_3 $Id: cdc_task.c,v 1.6 2006/03/17 13:06:22 rletendu Exp $ //! //! @todo //! @bug //!/ //_____ I N C L U D E S ___________________________________________________ #include "config.h" #include "conf_usb.h" #include "cdc_task.h" #include "lib_mcu\usb\usb_drv.h" #include "usb_descriptors.h" #include "modules\usb\device_chap9\usb_standard_request.h" #include "usb_specific_request.h" #include "lib_mcu/uart/uart_lib.h" #include "uart_usb_lib.h" #include <stdio.h> ///////////////////////////////////////////////////////////////CODIGO Inserido //_____ M A C R O S ________________________________________________________ unsigned int temp=0; unsigned char rpm=0; U16 d_b1, d_b2; long int var1,var2; //_____ D E F I N I T I O N S ______________________________________________ #define sbi(port,bit) (port |= (1<<bit)) //set bit in port #define cbi(port,bit) (port &= ~(1<<bit)) //clear bit in port //_____ D E C L A R A T I O N S ____________________________________________ volatile U8 cpt_sof; extern U8 rx_counter; extern U8 tx_counter; S_line_coding line_coding; //! @brief This function initializes the hardware ressources required for CDC demo. //! //! //! @param none //!

II
//! @return none //! //!/ void cdc_task_init(void) uart_init(); Leds_init(); Joy_init(); Hwb_button_init(); Usb_enable_sof_interrupt(); DDRD=0x00; PORTD=0xFF; DDRB=0x00; PORTB=0xFF; DDRE=0xFF;//saida de dados PORTE=0x00; DDRF=0x00; PORTF=0x00; PORTE=0xFF; // set Clock Prescaler Change Enable CLKPR = (1<<CLKPCE); // set prescaler = 8, Inter RC 8Mhz / 1 = 8Mhz CLKPR = (0<<CLKPS1) | (0<<CLKPS0); EICRA =(1<<ISC01)|(0<<ISC00); // Na interrupção INT0, uma transição para um nível 0 origina a interrupção EIMSK =(1<<INT0); // Ativa interrupção INT0 #ifdef AVRGCC fdevopen(uart_usb_putchar,uart_usb_getchar); //for printf redirection #endif void begin() cli(); sei(); void media(int val)//função para calcular a media dos valores e envio de dados para a porta serie char sensor=0; sensor=0xF0; sensor+=val; var1=var1>>3;//faz a divisao da soma das leituras por 8 var2=var2>>3; uart_usb_putchar(sensor);//envia o nome do sensor uart_usb_putchar(var1);//envia o valor medio do ADCH uart_usb_putchar(var2);//envia o valor medio do ADCL var1=0; var2=0; void ADC_read(U8 input) DDRF=0x00; PORTF=0x00; ADMUX=0xC0; // tensao de referencia 2,560 Volts ADMUX+=input; ADCSRA = (1<<ADEN) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0); // set ADC prescaler sbi(ADCSRA, ADEN); // Enable the ADC //do a dummy readout first ADCSRA |= (1<<ADSC); // do single conversion

III
while(!(ADCSRA & 0x10)); // wait for conversion done, ADIF flag ative d_b2 = ADCL; // read out ADCL regist d_b1 = ADCH; // read out ADCH register cbi(ADCSRA, ADEN); // disable the ADC var1=var1+d_b1;//soma 8 valores de leitura var2=var2+d_b2; void tensaooffset() int i=0; for(i=0;i<8;i++)//faz 8 leituras para seguidamente tirar a media do valor lido ADC_read(0); media(0); for(i=0;i<8;i++) ADC_read(1); media(1); int tempo()//função que garante que o led seja mantido aceso durante 2 segundos TCNT1=0x7a11; //tempo para efetuar 1 segundo TIFR1|=(1<<TOV1); //limpa a flag de overflow (TOV1) TIMSK1=(1<<TOIE1); //ativa a fonte de interrupção por overflow (TOIE1) TCCR1A=0x00; //configuração do modo de funcionamento (modo normal) TCCR1B=(1<<CS12); //configuração do modo de funcionaento (modo normal) e Clock/256 return 0; ISR(TIMER1_OVF_vect)//rotina de serviço a interrupção do timer 1 por overflow,nesta rotina é atualizado o novo valor do PORTD int i=0; TCCR1B=0x00;//parar o timer 1 TIFR1 =(1<<TOV1);//limpar a flag associada a fonte de interrupçao por overflow PORTE=0x01; uart_usb_putchar(0xA0); uart_usb_putchar(rpm); for(i=0;i<8;i++)//faz 8 leituras para seguidamente tirar a media do valor ADC_read(0); media(0); for(i=0;i<8;i++) ADC_read(1); media(1);

IV
/*for(i=0;i<8;i++) para os testes realizado pro relatorio nao foi preciso ADC_read(2); media(2); for(i=0;i<8;i++) ADC_read(3); media(3);*/ rpm=0; temp=0; ISR(INT0_vect) // Interrupção externa 0 cli(); // Desabilita interrupção PORTE=0x05; if(temp==0) tempo(); temp=1; rpm=rpm+1;//atualiza o numero de interrupçoes ocorridas sei(); // Habilita interrupção ////////////////////////////////////////////////////////////////////////////////////////////// codigo existente do template //! @brief Entry point of the uart cdc management //! //! This function links the uart and the USB bus. //! //! @param none //! //! @return none void cdc_task(void) unsigned char rec_usb=0; if(Is_device_enumerated()) //Enumeration processs OK ? if(cpt_sof>=NB_MS_BEFORE_FLUSH && tx_counter!=0 ) //Flush buffer in Timeout cpt_sof=0; uart_usb_flush(); /* if (uart_test_hit()) //Something on USART ? uart_usb_putchar(uart_getchar()); // Loop back, USART to USB Led0_toggle(); if (Uart_tx_ready()) //USART free ? if (uart_usb_test_hit()) // Something received from the USB ? while (rx_counter) uart_putchar(uart_usb_getchar()); // loop back USB to USART Led3_toggle(); */
V
///////////////////////////////////////////////////////////////CODIGO Inserido if (uart_usb_test_hit()) // Something received from the USB ? rec_usb=uart_usb_getchar(); switch(rec_usb) case '1': begin(); break; case '2': tensaooffset(); break; ////////////////////////////////////////////////////////////////////////////////////////////// codigo existente do template //! @brief sof_action //! //! This function increments the cpt_sof counter each times //! the USB Start Of Frame interrupt subroutine is executed (1ms) //! Usefull to manage time delays //! //! @warning Code:?? bytes (function code length) //! //! @param none //! //! @return none void sof_action() cpt_sof++;

VI

VII
Anexo B
O Anexo B corresponde ao programa desenvolvido em LabVIEW, como este é
demasiado grande em termos de visualização optou-se por colocar o ficheiro
correspondente em anexo digital presente num CD.

VIII

IX
Anexo C
Neste presente anexo estão digitalizadas os certificados de calibração da célula
de carga com autentificação da FUTEKTM

X

XI

XII

XIII