Embed Size (px)
Citation preview
LAB02
Transdutor Potenciométrico e Instrumentação Virtual
Objetivos
Utilizar um transdutor potenciométrico. Construir ou utilizar um pêndulo experimental com
um transdutor potenciométrico (com todas as não idealidades do conjunto desenvolvido)
utilizado para determinar a posição angular do eixo. Investir no desenvolver de uma interface
homem-máquina (HMI) com o LabVIEW para o correspondente pêndulo. Reforçar os
conceitos apresentados em aula sobre Instrumentação Virtual. Relembrar conceitos básicos
de eletrônica analógica e projeto de filtros (filtro anti-aliasing). Utilizar uma das possíveis
ferramentas disponíveis nesta área para desenvolvimento dos pequenos projetos solicitados
neste Laboratório. Utilizar a plataforma disponível (LabVIEW e se necessário placas DAQ da
National Instruments ou Sistema de Aquisição de Dados desenvolvido pelo grupo –
preferencialmente, por exemplo, um conversor A/D interfaceado com o PC ou um sistema
microprocessado-A/D interno (funcionando como escravo) interfaceado com o PC
(funcionando como mestre – rodando o LabVIEW)). Além disso, interfacear outras
ferramentas computacionais com o LabVIEW, como por exemplo, o MatLab. Desenvolver
algumas tarefas desafios para demonstrar o trabalho e a eficiência do grupo na solução de
problemas.
Conceitos Teóricos Adicionais
Verificar conceitos teóricos no Vol. II (Cap. 11 e Experiência 27) e nas Notas de Aula 05A.
Verificar o Help da(s) ferramenta(s) utilizada(s) (LabVIEW e/ou MatLAB), Notas de Aula 04A
e 04B e referências bibliográficas citadas no Plano de Ensino da disciplina.

2
Datas Importantes
Aulas Experimentais destinadas a este experimento: 26/08 e 02/09.
Data Entrega Relatório: 09/09.
Revisão de Conceitos Básicos
Um transdutor potenciométrico pode ser resumidamente descrito conforme o esboço da
Figura 1.
Figura 1 – Esboço das relações entre entrada e saída em um típico transdutor
potenciométrico.
A função de transferência teórica simplificada (resistência diretamente proporcional ao
comprimento do condutor) pode ser representada por (ver Figura 2):
𝑅𝑥 = 𝜌𝑙𝑥𝐴= 𝜌
𝑘𝑙
𝐴
𝑅𝑥 = 𝑘𝑅; para 0 < 𝑘 < 1
Figura 2 – Representação esquemática de um potenciômetro.
Resumidamente, o potenciômetro pode ser representando como um dispositivo
eletromecânico de resistência de valor fixo sobre a qual de desloca um contato (o cursor) que

3
a divide eletricamente (simbolicamente representado pela Figura 3) com 𝑅 representando a
resistência de valor fixo, a ponta da seta de sinal o cursor ou elemento deslizante e entre o
cursor e seus extremos se medem as resistências 𝑅1 e 𝑅2.
Figura 3 – Representação de um potenciômetro.
Um transdutor potenciométrico é composto, basicamente por uma resistência bobinada ou
normalmente por um filme condutor alimentado por uma fonte de tensão e um contato móvel
interligado (como sugestão verificar dispositivos auxiliares para transmissão de movimento –
ver Notas de Aula 05A) ao objeto em movimento. É importante observar que a Função de
Transferência Experimental, deste transdutor, apresenta desvios da sua linearidade devido a
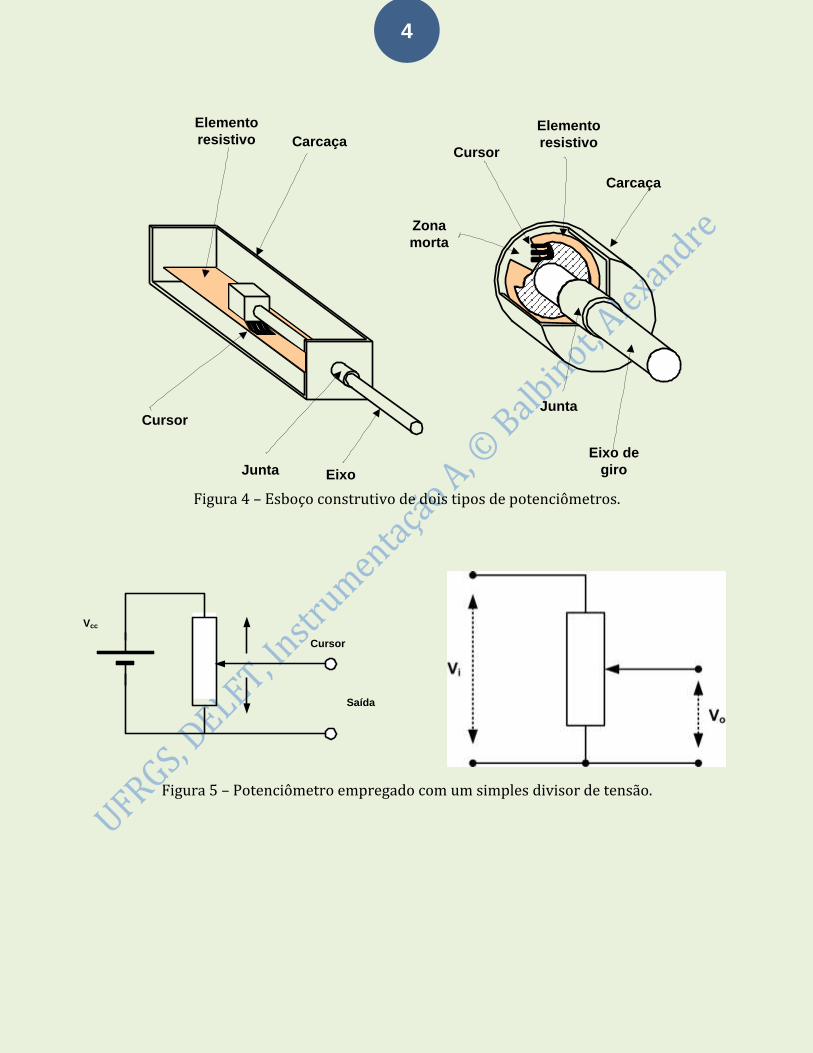
não uniformidade física e geométrica da resistência ao longo do seu comprimento. A Figura 4
apresenta o esboço de dois tipos de potenciômetros facilmente encontrados no mercado.
Normalmente o potenciômetro é empregado como um divisor de tensão (ver Figura 5). Esta
configuração como um simples divisor de tensão proporciona uma forma de
condicionamento para medir deslocamentos lineares ou angulares. Partindo do pressuposto
que a resistência do potenciômetro é linear e sua resistência é constante por unidade de
deslocamento, a tensão de saída é proporcional ao deslocamento realizado.
(3)
(1)
(2)
cursorR = R1+R
2
R1
R2
4
Figura 4 – Esboço construtivo de dois tipos de potenciômetros.
Figura 5 – Potenciômetro empregado com um simples divisor de tensão.
Elemento
resistivo Carcaça
Eixo
Cursor
Elemento
resistivo
Eixo de
giro
Cursor
Zona
morta
Carcaça
Junta
Junta
Saída
Vcc
Cursor

5
Considere a Figura 6 onde o circuito é formado por um potenciômetro linear de resistência
nominal 𝑅 e deslocamento máximo 𝐿.
Figura 6 –Potenciômetro linear de resistência nominal R.
Considere que 𝑦 é o deslocamento atual medido em relação a um ponto tomado como
referência, 0, e seja 𝑥 =𝑦
𝐿 a fração do deslocamento percorrido. Como estamos considerando
o mesmo linear, a fração de deslocamento, 𝑥, corresponde a uma fração equivalente da
resistência nominal 𝑅. Em função desses apontamentos é possível obter as seguintes relações
simples:
𝑅1 = 𝑅𝑥
𝑅2 = 𝑅(1 − 𝑥)
onde 𝑅1 equivale a porção da resistência do potenciômetro compreendida entre 0 e o cursor e
𝑅2 o restante, conforme indicado na Figura 6.
É importante observar que o comportamento do potenciômetro, como elemento de um
circuito (Figura 7), depende de sua impedância de entrada e de saída. A impedância de
entrada, Ri e de saída Ro, do potenciômetro anterior – SEM CARGA é:
𝑅𝑜 = 𝑅1//𝑅2=𝑅𝑥(1 − 𝑥)
R2= R·(1-x)
L
R1=R·x
vi
0
y

6
𝑅𝑖 = 𝑅
Figura 7 – Potenciômetro como elemento de um circuito.
Determinando o circuito equivalente de Thévenin (fonte ideal) – SEM CARGA (Figura 8):
Figura 8 – Circuito equivalente de Thévenin.
Sem carga, a impedância de entrada é constante e impedância de saída é alterada em função
da fração de deslocamento x, conforme pode-se verificar no gráfico representado na Figura 9
que mostra a impedância de saída em função do deslocamento (a alteração da impedância de
saída é indicada em percentual em relação a resistência nominal do potenciômetro).
Figura 9 - Impedância de saída % em função do deslocamento x.
R2= R·(1-x)
L
R1=R·x
vi
0
y
Ro = R1//R2
vTH
Ro = R·x·(1-x)
Vi·x
0
0,5 1
10
20
30
[%]
R
(x)o
R
x
7
As alterações na impedância de saída não afetam a resposta do potenciômetro, visto que não
circula corrente por Ro – considerando-se o circuito aberto! A tensão de saída, Vo, coincide
com a tensão de Thévenin:
𝑉𝑜 = 𝑉𝑖𝑅1
𝑅1+𝑅2= 𝑉𝑖𝑥, 𝑥 ∈ [0,1]
Portanto, a tensão de saída varia linearmente com o deslocamento. Evidentemente que
para este circuito ser útil é necessário conectar em sua saída a etapa de entrada de
outro dispositivo, cujo caso, a impedância de entrada deste dispositivo se comportará
como uma carga para o potenciômetro. Verificar discussões no final deste laboratório.
Resumidamente, um transdutor potenciométrico é alimentado por uma fonte de tensão e seu
contato móvel é interligado, de forma direta ou indireta, ao objeto em movimento. É
importante ressaltar que a função de transferência experimental pode apresentar desvios de
sua linearidade devido a não uniformidade física e geométrica da resistência ao longo do
comprimento do potenciômetro. Idealmente é condicionado como um divisor de tensão, mas
um circuito condicionador completo normalmente utiliza uma fonte de referência e um
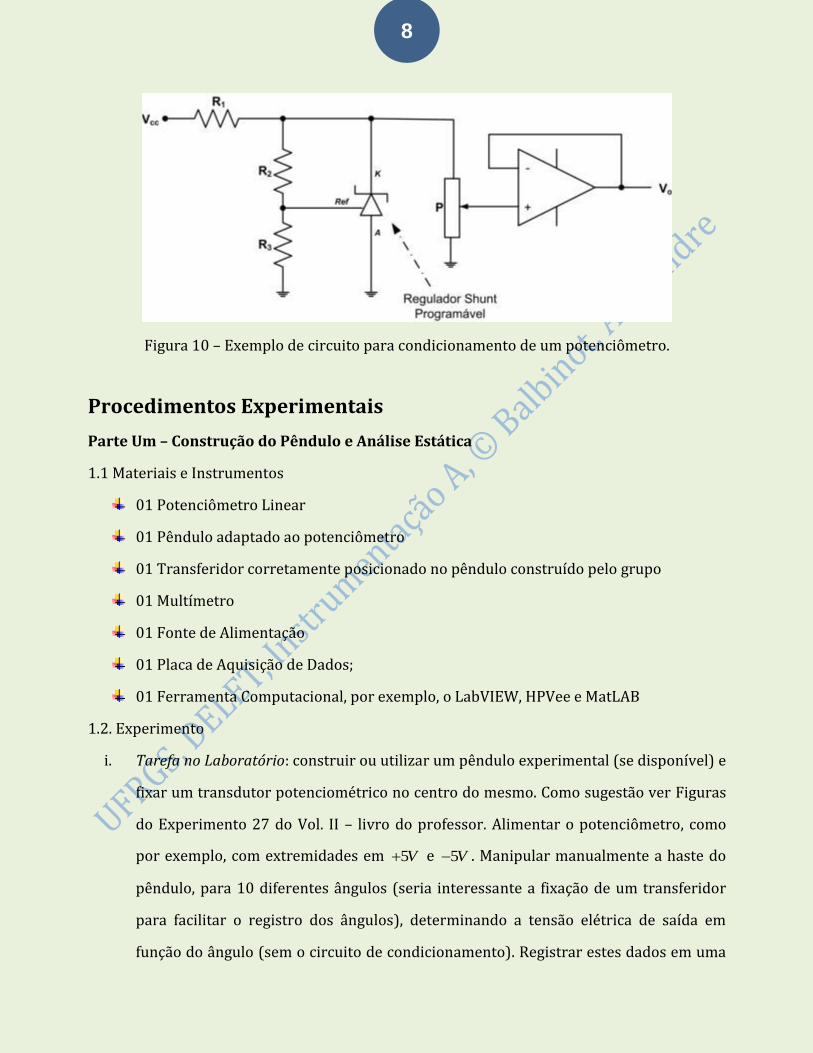
seguidor de tensão. No exemplo da Figura 10 foi utilizado um regulador do tipo shunt
programável, por exemplo, o TL431. Este circuito pode ser adaptado para o uso de um CI de
referência de precisão (por exemplo, as referências de tensão REF01A, REF02A, AD584, entre
outros) ou por um amplificador de instrumentação contendo internamente uma referência de
tensão de precisão, como por exemplo, o INA125 ou outro similar.
8
Figura 10 – Exemplo de circuito para condicionamento de um potenciômetro.
Procedimentos Experimentais
Parte Um – Construção do Pêndulo e Análise Estática
1.1 Materiais e Instrumentos
01 Potenciômetro Linear
01 Pêndulo adaptado ao potenciômetro
01 Transferidor corretamente posicionado no pêndulo construído pelo grupo
01 Multímetro
01 Fonte de Alimentação
01 Placa de Aquisição de Dados;
01 Ferramenta Computacional, por exemplo, o LabVIEW, HPVee e MatLAB
1.2. Experimento
i. Tarefa no Laboratório: construir ou utilizar um pêndulo experimental (se disponível) e
fixar um transdutor potenciométrico no centro do mesmo. Como sugestão ver Figuras
do Experimento 27 do Vol. II – livro do professor. Alimentar o potenciômetro, como
por exemplo, com extremidades em 5V e 5V . Manipular manualmente a haste do
pêndulo, para 10 diferentes ângulos (seria interessante a fixação de um transferidor
para facilitar o registro dos ângulos), determinando a tensão elétrica de saída em
função do ângulo (sem o circuito de condicionamento). Registrar estes dados em uma

9
tabela ângulo versus tensão elétrica de saída.
ii. Tarefa para Casa: utilizando uma ferramenta computacional apresentar um gráfico
representando o ensaio anterior. Comparar a função de transferência ideal com a
experimental - avaliar a possível diferença entre essas formas de onda. Determinar o
erro de linearidade do sistema desenvolvido.
iii. Tarefa para Casa: apresentar uma discussão referente a quantidade de amostras
(medidas obtidas) para cada ângulo versus tensão.
iv. Tarefa no Laboratório: refazer o experimento do primeiro item com o condicionador
elaborado por vocês (utilizar como referência as discussões e revisões apresentadas
neste texto – não esquecer de incluir um filtro anti-aliasing).
v. Tarefa no Laboratório: utilizar a placa DAQ (verificar Notas de Aula 04 e Experimento
26 do Vol. II – livro do professor) e desenvolver uma rotina no LabVIEW que permita:
(a) mostrar a forma de onda no domínio do tempo, (b) mostrar a forma de onda no
domínio da freqüência e (c) salvar a correspondente forma de onda obtida. Desenvolva
uma interface homem máquina agregando qualidade ao sistema desenvolvido
(condicionador e pêndulo desenvolvido). Com o pêndulo oscilando realize aquisições
de dados (salvar as correspondentes formas de onda). Sugestão: deixo como sugestão
o desenvolvimento de um sistema de baixo custo: seleção de um ADC de baixo custo
interfaceado a uma porta de I/O, por exemplo, paralela, serial ou USB com aquisição e
controle através do LabVIEW (este sistema inclusive poderá ser agregado ao trabalho
final no lugar da utilização de uma placa comercial se o grupo necessitar adquirir
sinais no trabalho final). Observar que todas as rotinas devem ser apresentadas no
relatório como um fluxograma e com todos os blocos utilizados pelo LabView
(quando utilizado com o MatLab apresentar a rotina desenvolvida no MatLab e a
correspondente interface com o LabVIEW).
vi. Tarefa no Laboratório e/ou Tarefa para Casa: com os dados adquiridos no item
anterior desenvolva um programa APENAS no MatLAB para apresentar os sinais no
domínio do tempo e no domínio da frequência. Faça uma comparação com o programa
desenvolvido no LabVIEW.

10
vii. Tarefa no Laboratório e/ou Tarefa para Casa: para a tarefa do item v desenvolva um
programa utilizando o LabVIEW E o MatLAB juntos (usar o MatLab Script).
viii. Tarefa para Casa: estimar a sensibilidade, a resolução e o erro de linearidade de seu
sistema.
ix. Tarefa para Casa: de posse da função de medição de seu sistema estimar a incerteza
combinada deste sistema.
x. Tarefa para Casa: com os sinais armazenados pelo programa LabVIEW elaborar um
procedimento para determinar o decaimento em função do tempo e discutir esse
resultado.
xi. Tarefa no Laboratório e/ou Tarefa para Casa: Medição da Amplitude. Resolvendo a
equação do movimento de um simples pêndulo, é possível encontrar que o período T
depende do comprimento l, aceleração da gravidade g e amplitude de oscilação 𝜃𝑜 , de
acordo com:
𝑇 = 2𝜋√𝑙
𝑔[1 +
1
4𝑠𝑒𝑛2 (
𝜃𝑜2) +
9
64𝑠𝑒𝑛4 (
𝜃𝑜2) +⋯ ]
O período não depende da massa. Considerando-se oscilações pequenas é possível
aproximar a relação para:
𝑇 = 2𝜋√𝑙
𝑔
Considerando-se o pêndulo desenvolvido por vocês (ver esboço da Figura 11), o valor
da amplitude 𝜃𝑜 pode ser obtido, por simples relações trigonométricas, de algumas
medidas do comprimento.
11
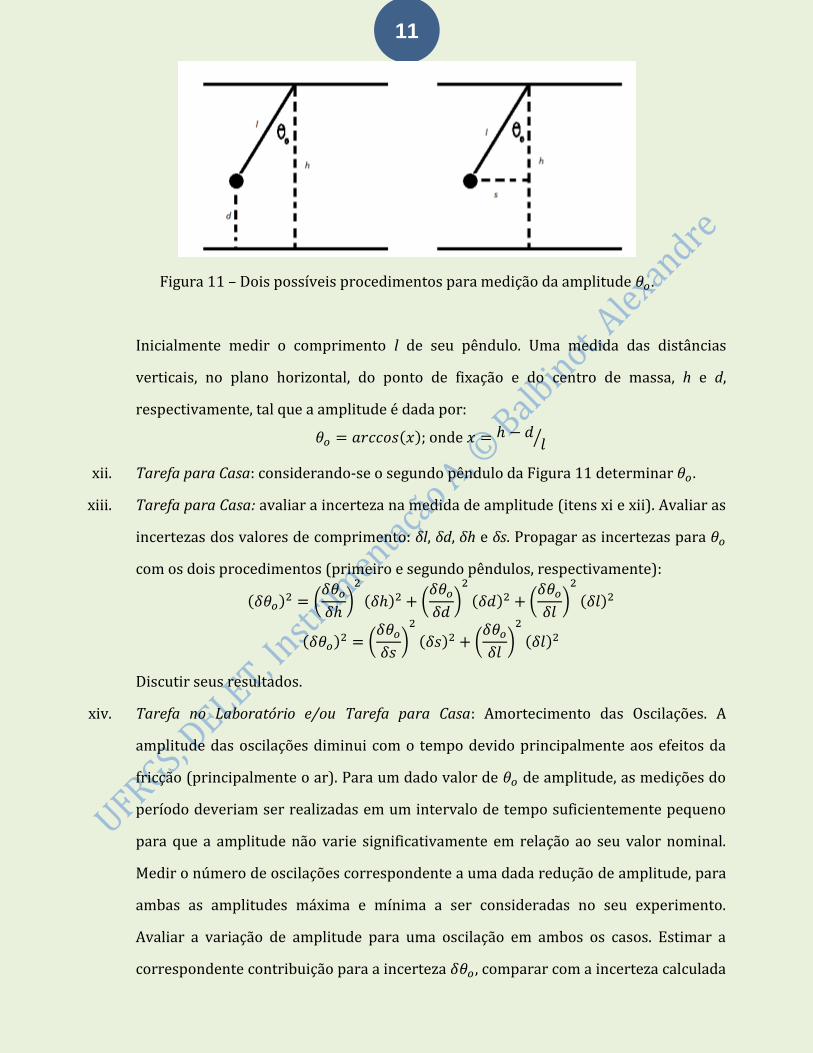
Figura 11 – Dois possíveis procedimentos para medição da amplitude 𝜃𝑜 .
Inicialmente medir o comprimento l de seu pêndulo. Uma medida das distâncias
verticais, no plano horizontal, do ponto de fixação e do centro de massa, h e d,
respectivamente, tal que a amplitude é dada por:
𝜃𝑜 = 𝑎𝑟𝑐𝑐𝑜𝑠(𝑥); onde 𝑥 = ℎ − 𝑑𝑙⁄
xii. Tarefa para Casa: considerando-se o segundo pêndulo da Figura 11 determinar 𝜃𝑜 .
xiii. Tarefa para Casa: avaliar a incerteza na medida de amplitude (itens xi e xii). Avaliar as
incertezas dos valores de comprimento: δl, δd, δh e δs. Propagar as incertezas para 𝜃𝑜
com os dois procedimentos (primeiro e segundo pêndulos, respectivamente):
(𝛿𝜃𝑜)2 = (
𝛿𝜃𝑜𝛿ℎ
)2
(𝛿ℎ)2 + (𝛿𝜃𝑜𝛿𝑑
)2
(𝛿𝑑)2 + (𝛿𝜃𝑜𝛿𝑙
)2
(𝛿𝑙)2
(𝛿𝜃𝑜)2 = (
𝛿𝜃𝑜𝛿𝑠
)2
(𝛿𝑠)2 + (𝛿𝜃𝑜𝛿𝑙
)2
(𝛿𝑙)2
Discutir seus resultados.
xiv. Tarefa no Laboratório e/ou Tarefa para Casa: Amortecimento das Oscilações. A
amplitude das oscilações diminui com o tempo devido principalmente aos efeitos da
fricção (principalmente o ar). Para um dado valor de 𝜃𝑜 de amplitude, as medições do
período deveriam ser realizadas em um intervalo de tempo suficientemente pequeno
para que a amplitude não varie significativamente em relação ao seu valor nominal.
Medir o número de oscilações correspondente a uma dada redução de amplitude, para
ambas as amplitudes máxima e mínima a ser consideradas no seu experimento.
Avaliar a variação de amplitude para uma oscilação em ambos os casos. Estimar a
correspondente contribuição para a incerteza 𝛿𝜃𝑜 , comparar com a incerteza calculada

12
no item xiii e se necessário levar em conta.
xv. Tarefa no Laboratório: Medição do Período. Medir o período T para diferentes valores
de amplitude (tipicamente 10 medidas, uniformemente distribuídas, por exemplo,
entre 5° e 70°). Repetir as medições para avaliar o efeito das flutuações aleatórias.
xvi. Tarefa para Casa: utilizando uma ferramenta computacional apropriada apresentar
um gráfico com amplitude 𝜃𝑜 e período T nos eixos horizontal e vertical,
respectivamente. Observe as unidades utilizadas para as amplitudes: graus ou
radianos. Visualmente verifique se o comportamento regular é evidente na relação de
dependência entre período e amplitude. Para amplificar este comportamento, é
conveniente determinar o período To correspondente para amplitudes pequenas, e
plotar a diferença T – To contra amplitude.
xvii. Tarefa para Casa: considerando-se a seguinte situação: um potenciômetro com carga
em seus terminais. A tensão de saída é derivada de um divisor de tensão entre Ro e RL.
Considere o circuito sensor potenciométrico e seu equivalente de Thévenin
apresentados na Figura 12. Determinar 𝑉𝑜𝐿 e dividir a expressão determinada por 𝑅𝐿 .
Discutir seus resultados.
Figura 12 – Circuito potenciométrico com carga e seu circuito equivalente.
xviii. Tarefa para Casa: para o mesmo potenciômetro com carga (Figura 12) elabore um
gráfico representando a saída do potenciômetro com carga em função do
deslocamento: 𝑉𝑂𝐿
𝑉𝑖⁄ [%] (range de 0 a 100) versus 𝑥 (range de 0 a 1). Que tipo de
R2=R·(1-x)
L
R1=R·x
vi
RL
Carga
0v
oL
vTH
Ro = R·x·(1-x)
Vi·x RL
Carga
voL
l
13
erro está sendo considerado nesta discussão?
xix. Tarefa para Casa: determinar a sensibilidade (𝑆) do circuito anterior. Apresentar um
gráfico representando a relação entre 𝑆 𝑉𝑖⁄ [%] (range de 0 a 200) versus 𝑥 (range de 0
a 1).
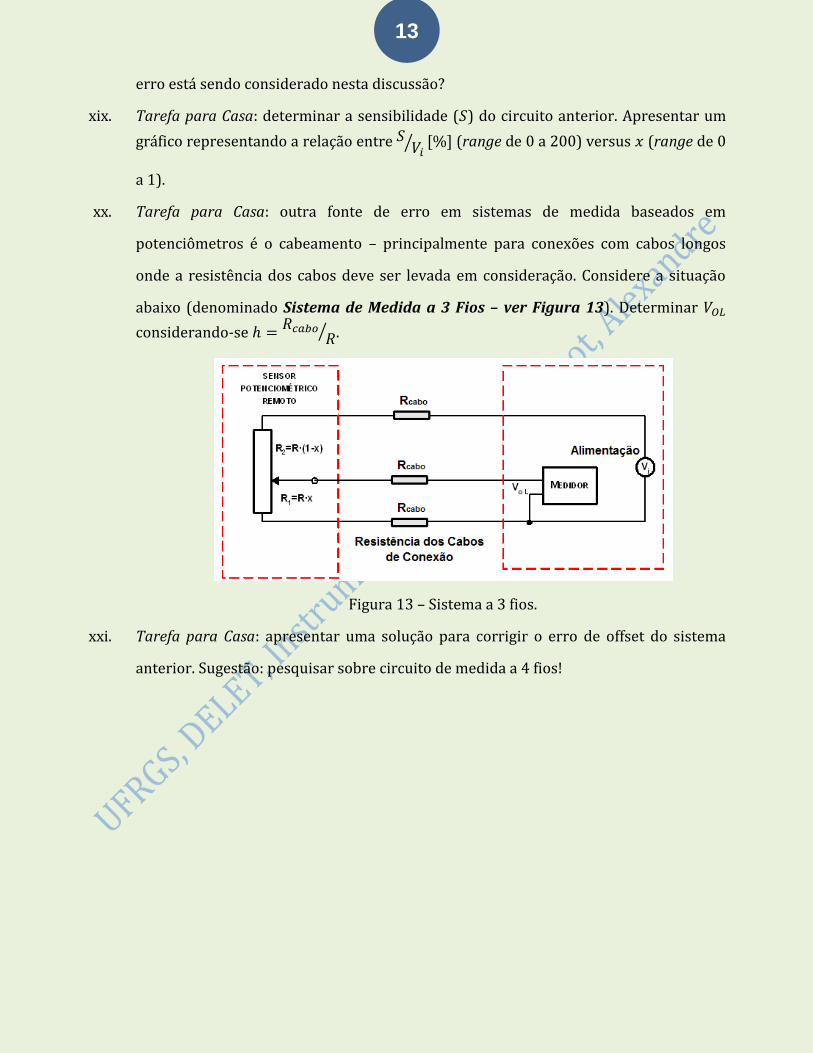
xx. Tarefa para Casa: outra fonte de erro em sistemas de medida baseados em
potenciômetros é o cabeamento – principalmente para conexões com cabos longos
onde a resistência dos cabos deve ser levada em consideração. Considere a situação
abaixo (denominado Sistema de Medida a 3 Fios – ver Figura 13). Determinar 𝑉𝑂𝐿
considerando-se ℎ =𝑅𝑐𝑎𝑏𝑜
𝑅⁄ .
Figura 13 – Sistema a 3 fios.
xxi. Tarefa para Casa: apresentar uma solução para corrigir o erro de offset do sistema
anterior. Sugestão: pesquisar sobre circuito de medida a 4 fios!

14
Anexo – Cadeia de Medida
A Figura 14 apresenta o esboço de uma Cadeia de Medidas genérica.
Figura 14 - Margens de sinais e margens dinâmicas de uma cadeia genérica de medida.
Baseado na cadeia de medida genérica (Figura 14) observe que:
o sensor deve ser capaz de discernir alterações no sinal de entrada (variações de X), ou
seja, uma variação de X deve produzir uma variação significativa de tensão no sensor:
sensorVX ;
o ADC terá uma margem de entrada (tensões) M. Se a margem for, por exemplo, de 0 V
até M V, sua resolução será: 12 n
M ;
a saída do ADC oferecerá n2 códigos distintos, por exemplo, se for um ADC de 4 bits:
0000 até 1111 e, portanto, sua resolução é a alteração de um bit menos significativo (1
LSB);
a adaptação entre a margem de tensões de saída do sensor e a margem de entrada do
ADC é realizada pelo amplificador operacional (AMPOP: a tensão máxima - módulo) é
limitada em qualquer caso a um valor inferior a tensão de alimentação do ampop
(saturação) e em muitos casos por distorções não lineares para grande sinais
(sobrecarga). O valor mínimo (em módulo) é limitado pelo ruído e por derivas

15
intrínsecas, pelas distorções para pequenos sinais e por interferências externas;
o MUX (multiplexador) e a unidade S&H (amostrador e retenha) normalmente não
modificam a margem de tensões, mas é possível um aumento do nível de ruído.
A Margem Dinâmica MD de um sensor, elemento ou sistema é definida pelo quociente entre
o nível máximo de saída (para não apresentar sobrecarga) pelo nível mínimo de saída
aceitável (por ruído, distorção, interferência ou resolução). O valor máximo pode ser
determinado segundo as especificações (por exemplo, distorções) válidas. Se os níveis não se
referem ao mesmo parâmetro (valor de pico, pico a pico ou eficaz) os mesmos devem ser
especificados. Se o valor mínimo é determinado por um sinal aleatório é frequentemente
caracterizado mediante seu valor eficaz. A MD normalmente é expressa em dB - na figura da
cadeia de medida genérica se considera que na diferença entre níveis a unidade empregada
são os decibéis dB .
Portanto, para um ADC a menor alteração na entrada para produzir uma alteração na saída se
denomina de resolução ou de intervalo de quantização q . Logo, para um ADC de n bits com
M representando a margem das tensões de entrada do ADC, a resolução é dada por:
1212
max
nn
MVq .
Portanto, a faixa dinâmica da entrada )(DR do ADC é:
12
12
n
nmáx
q
q
q
VDR .
Portanto, a saída do ADC tem 12 n intervalos (ou n2 estados) e a menor alteração é 1 LSB!
A faixa dinâmica (ou margem dinâmica) da saída do ADC é dada em dB por:
16
nM
dBMD
6log20
.
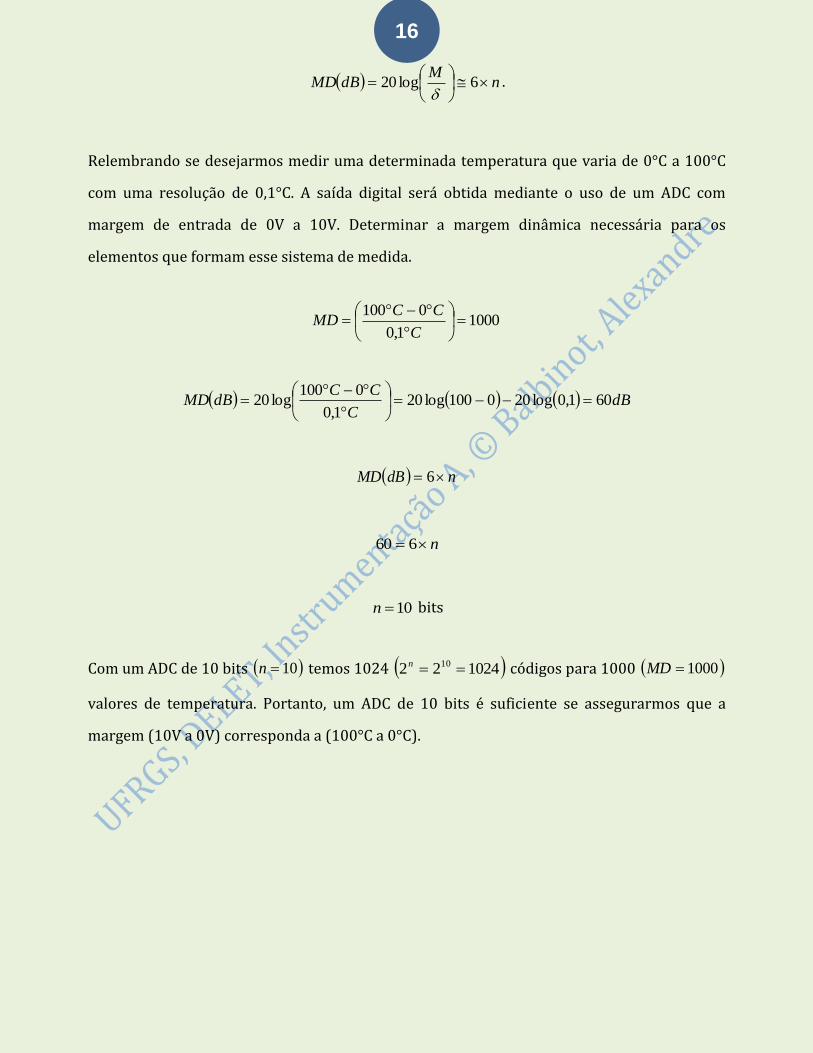
Relembrando se desejarmos medir uma determinada temperatura que varia de 0°C a 100°C
com uma resolução de 0,1°C. A saída digital será obtida mediante o uso de um ADC com
margem de entrada de 0V a 10V. Determinar a margem dinâmica necessária para os
elementos que formam esse sistema de medida.
10001,0
0100
C
CCMD
dBC
CCdBMD 601,0log200100log20
1,0
0100log20
ndBMD 6
n 660
10n bits
Com um ADC de 10 bits 10n temos 1024 102422 10 n códigos para 1000 1000MD
valores de temperatura. Portanto, um ADC de 10 bits é suficiente se assegurarmos que a
margem (10V a 0V) corresponda a (100°C a 0°C).