-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
1/10
LabVIEW para implementar técnicas de controle avançadopara
aplicações de robótica
Este artigo descreve como usar o LabVIEW para analisar e
implementar controladores em aplicações de
robótica. Vamos abordar três tarefas comuns utilizadas em
robótica e através de e!emplos e!istentes nesses
produtos destacaremos alguns dos recursos dessas
ferramentas.
Este artigo n"o é destinado a descrever cada problema em
detal#es e sim somente mostrar o problema de
controle e solucion$%lo usando as ferramentas
dispon&veis.
Controle de pêndulo invertido linear por realimentação de
estados' pêndulo invertido é uma das plantas mais con#ecidas em
controle avançado. ' problema consiste em um
carro com uma #aste acoplada.
' carro se move somente em um ei!o e a #aste pode rotacionar
livremente em torno de uma articulaç"o. '
ob(etivo desse problema é desenvolver um controlador )ue move o
carro e sempre o mantém em uma posiç"o
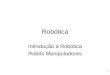
espec&fica en)uanto e)uilibra a #aste. Ve(a a figura 1.
F1. Problema do pêndulo invertido.
*o analisar o sistema você poder$ identificar as vari$veis
a seguir+
X+ ,osiç"o absoluta do carro -m
Θ: /ngulo da #aste relacionado 0 lin#a de centro
-radF: 1orça aplicada ao carro -2
M: 3assa do carro -4g
http://www.mecatronicaatual.com.br/educacao/2429-utilize-o-labview-para-implementar-tecnicas-de-controle-avancado-para-aplicacoes-de-roboticahttp://www.mecatronicaatual.com.br/educacao/2429-utilize-o-labview-para-implementar-tecnicas-de-controle-avancado-para-aplicacoes-de-roboticahttp://www.mecatronicaatual.com.br/educacao/2429-utilize-o-labview-para-implementar-tecnicas-de-controle-avancado-para-aplicacoes-de-roboticahttp://www.mecatronicaatual.com.br/educacao/2429-utilize-o-labview-para-implementar-tecnicas-de-controle-avancado-para-aplicacoes-de-robotica
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
2/10
5e você considerar )ue o carro n"o possui atrito para se
deslocar e linearizar suas e)uações n"o lineares em
torno de 6 7 8 poder$ escrever no formato de espaço de estados
definido como+
! 7 *! 9 :u
; 7
E se substituir as vari$veis para uma planta real dever$ ter a
seguinte e)uaç"o+
2a )ual os estados de >!-t? s"o a posiç"o -! e velocidade -d!
do carro além do @ngulo -t#eta e da
velocidade angular -dt#eta da #aste. * entrada do sistema
>u-t? é a força aplicada ao carro e a sa&da do
sistema >;-t? é a posiç"o -! e o @ngulo -t#eta.
Ama das técnicas usadas para solucionar o problema de controle é
c#amada de controle por realimentaç"o
de estados. Ela consiste em medir todas as vari$veis do sistema
-estados multiplicar por alguns gan#os e
somar todas as respostas. Esse processo tentar$ levar todos os
estados para zero o )ue no nosso caso é o
@ngulo da #aste.
' desafio é como pro(etar todos os gan#os )ue v"o conduzir todos
os estados para zero. B$ v$rias técnicas
empregadas para pro(etar os gan#os. Ama delas é c#amada
posicionamento de polos na )ual usamos a
e)uaç"o de L;apunov para avaliar os gan#os.
Usando o pêndulo linear Vamos usar o e!emplo presente no
módulo LabVIEW Control Design and Simulation para
demonstrar a
operaç"o do pêndulo invertido. ,ara abrir o e!emplo v$ em
BelpC1ind E!amples navegue para DoboticsCC
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
3/10
F. "# $%ample finder.
F!. Painel frontal do pêndulo invertido.
,ara analisar mel#or esse sistema siga os passos abai!o+
• E!ecute o VI pressionando
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
4/10
• Asando o loop de simulaç"o e controle -Control and Simulation
loop a planta e o controlador s"o
implementados com a funç"o na paleta de 5imulation.
• ' código fora do loop de simulaç"o e controle -Control and
Simulation loop é usado para pro(etar
os gan#os utilizados no controlador. =evido ao flu!o de dados
este código é e!ecutado somente uma vez e as
matrizes resultantes s"o empregadas durante a e!ecuç"o do
loop.
• ' processo para pro(etar um controlador é+• CC
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
5/10
F&. Pro,e+to do +ontrole do pêndulo invertido.
F). C-digo do +ontrole por realimentação.
o+ali/ação +om filtro de 0alman estendido *o analisar um
sistema robótico o ru&do pode estar presente dentro do sistema
ou em suas medições. 2o
dom&nio de controle esses sistemas s"o c#amados de sistemas
estoc$sticos. Infelizmente se você tentar
aplicar )ual)uer técnica de controle cl$ssico a sistemas
estoc$sticos )ue possuem alto ru&do o controlador
n"o ser$ capaz de localizar nen#um sinal uma vez )ue ele ac#a
)ue a resposta verdadeira é r$pida e tentar$
corrigir o sistema.
Ama técnica usada para evitar este problema foi desenvolvida por
Dudolp# E. Palman em MQR8 na )ual ele
propõe um método de estimar os estados com base nas medições de
ru&do do sistema. Asando o filtro de
Palman os estados do sistema s"o estimados com mais precis"o e
permitem )ue o controlador atue como
esperado.
B$ v$rios tipos de filtros de Palman na literatura )ue podem ser
utilizados dependendo da aplicaç"o. 2estedocumento nós focaremos no
1iltro de Palman EstendidoF -EP1 S Extended Kalman Filter )ue
é feito
para estimar os estados das vari$veis )ue s"o n"o lineares.
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
6/10
filtro de 0alman estendido
,ara ilustrar o uso do filtro de Palman estendido abra o e!emplo
em DoboticsCC
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
7/10
referencia inercial no carro e sem ru&doU em vermel#o est$ a
mediç"o da dist@ncia e @ngulo do ponto de
referência com a presença de ru&do e em verde est"o os
valores estimados do filtro de Palman estendido.
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
8/10
F19. C-digo de e%emplo do filtro de 0alman.
Asando a barra de rolagem para a es)uerda você ver$ a definiç"o
do modelo do sistema baseada em um
modelo n"o linear com as caracter&sticas de ru&do. 2o
LabVIEW
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
9/10
F1!. *efinição do modelo.,ara usu$rios avançados a interface de
usu$rio do LabVIEW permite )ue você avalie a matriz de
covari@ncia
0 medida )ue ela varia ao longo do tempo.
$sta+ionando um +arro +om l-gi+a Fu//=
'utra técnica usada em sistemas de controle para robótica é a
lógica fuzz;. Esse tool4it é parte
do toolkit LabVIEW ,I= and 1uzz; Logic )ue permite )ue você
defina e controle um sistema baseado em
regras e vari$veis ligeiramente indefinidas.
' aspecto interessante dessa técnica é )ue n"o precisamos
definir um modelo preciso do sistema e você pode
definir a lei de controle baseado puramente nas #eur&sticas
e e!periência do usu$rio.
,ara demonstrar seu uso vamos abrir o e!emplo+
-
8/15/2019 LabVIEW Para Implementar Técnicas de Controle Avançado
Para Aplicações de Robótica
10/10
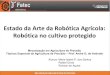
• V$ ao diagrama de blocos e analise como o sistema
funciona. 2ote )ue você tem dois controladores
1uzz; para os movimentos para frente e para tr$s -figura
1&.
F1&. *iagrama de blo+os do e%emplo de l-gi+a fu//=.
• V$ para toolsCC