Embed Size (px)
Citation preview

Utilização em um Problema de Engenharia

Modelo de Barra
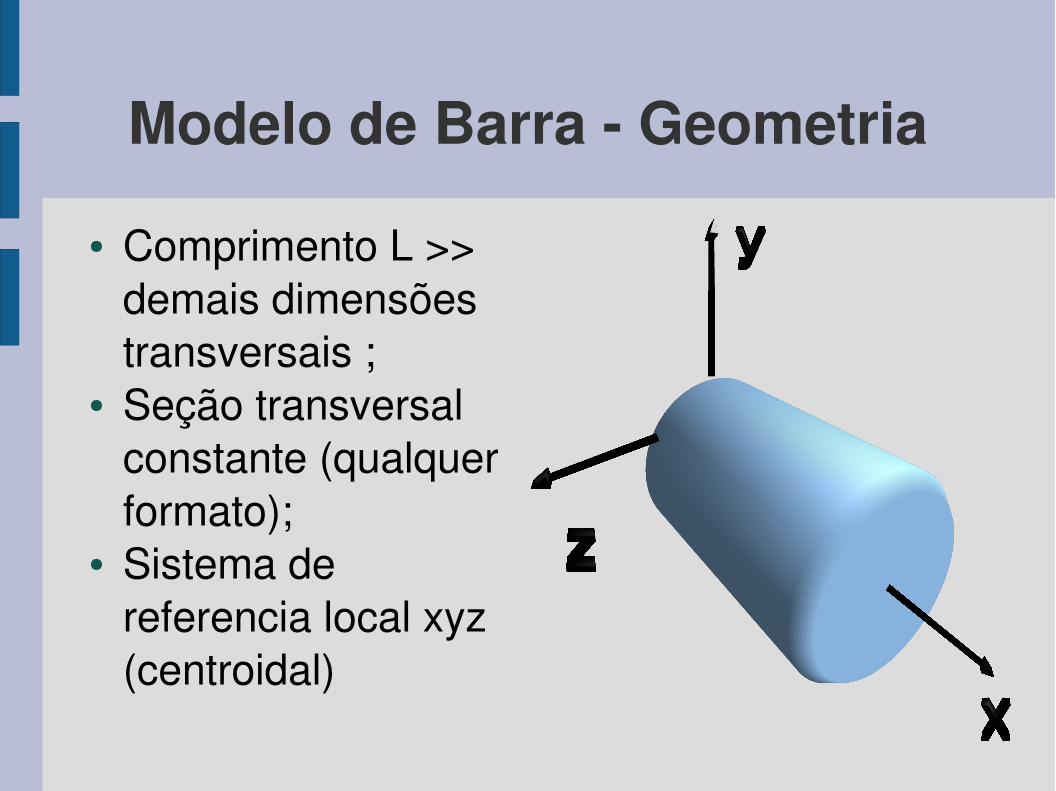
Modelo de Barra Geometria
● Comprimento L >> demais dimensões transversais ;
● Seção transversal constante (qualquer formato);
● Sistema de referencia local xyz (centroidal)

Modelo de Barra Material
● Homogêneo;● Isotrópico;● Regime Elástico;● Regime Linear.

Modelo de Barra Carregamento
● Somente carregamento axial;
● Não pode gerar momentos ou cortantes;
● A forma de aplicação da força não importa se L >>

Modelo de Barra – Comportamento
Fluxo de forças constante longe do ponto de aplicação da força;

Modelo de barra – Consequência 1
Somente tensão
normal constante ao longo de uma seção transversal

Modelo de barra – Consequência 2
● Somente deslocamentos axiais ;
● Todos os pontos de uma seção tem o mesmo deslocamento axial

Modelo de Barra – Caso Particular
● Assim, se forças forem aplicadas somente nas extremidades, verificamos que tanto a tensão quanto a deformação são homogêneas:
L
P
u
Modelo de Barra – Caso Particular
● Em qualquer ponto
● Em qualquer ponto
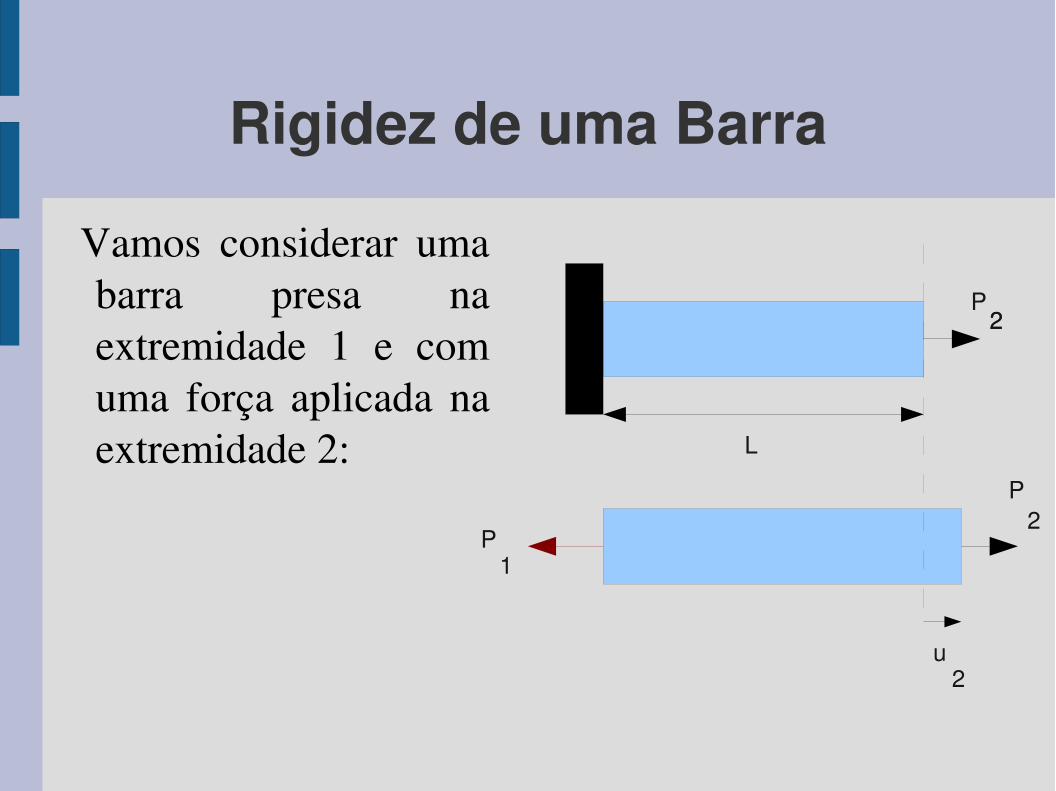
Rigidez de uma Barra
Vamos considerar uma barra presa na extremidade 1 e com uma força aplicada na extremidade 2: L
P
u2
2
P1
2
P2
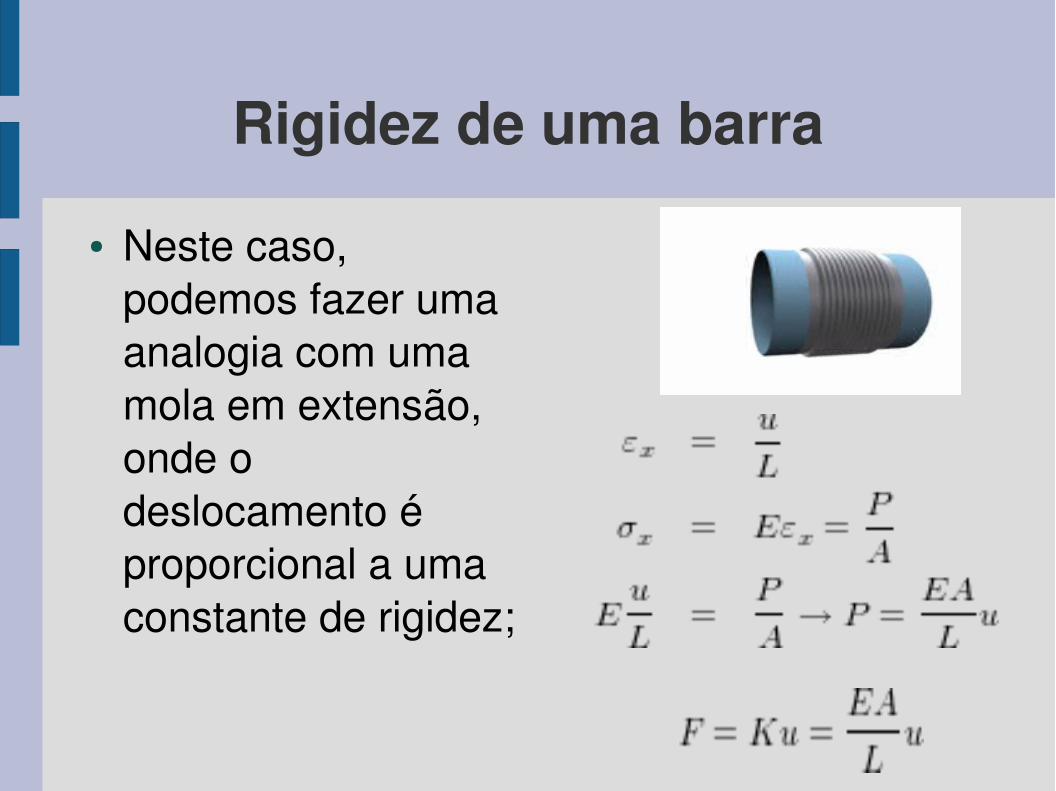
Rigidez de uma barra
● Neste caso, podemos fazer uma analogia com uma mola em extensão, onde o deslocamento é proporcional a uma constante de rigidez;

Matriz de Rigidez de uma Barra
● Assim, podemos verificar que:
L
P
u2
2
P1
2
P2

Matriz de Rigidez de uma Barra
● Ou, no outro lado:(x positivo para a
direita)
L
P
2
1
1P
P
u1

Matriz de Rigidez de uma Barra
● Como o problema é linear, podemos considerar agora um caso geral, onde as duas extremidades são carregadas e apresentam deslocamentos ;
● Neste caso, basta somar os resultados obtidos anteriormente:

Matriz de rigidez de uma Barra

Matriz de Rigidez
Este sistema de equações caracteriza o modelo de barra:
Matriz de Rigidez
Vetor de deslocamentos
nas extremidades
Vetor de deforças axiais nas
extremidades

Elemento Finito de Barra
● Descrito por sua matriz de rigidez Ke e por forças e deslocamentos em pontos préestabelecidos (nós) nó 1
nó 2
E, A e L

Elemento Finito de Barra
● Assim, se tivermos várias barras, basta conectar os elementos. Isto implica em conectar as matrizes de rigidez de cada elemento, formando um sistema cada vez maior.

Exemplo● Uma barra modelada pela união de 3
elementos finitos de barras.
nó 1 nó 2 nó 3 nó 4
P
u1 u2 u3 u4
P
u1 u2(2) (2)

Exemplo.
● Cuidado: existem informações do problema (Globais) e dos elementos (Locais). As matrizes de cada elemento são informações locais.

Exemplo
● Assim, cada elemento tem uma contribuição no sistema global, que representa toda a estrutura:

Exemplo

Exemplo
● E, somando as contribuições, vizando manter o equilíbrio de forças, observamos que

Exemplo
● Assim, substituindo as contribuições, obtemos

Exemplo
● Nunca esquecendo de informar as condições de contorno do problema: u(0)=u1=0 e P(L)=P4=P

Solução do Sistema de Equações
● Etapa que demanda tempo computacional;● Exponencialmente proporcional ao número
de nós considerados;

Treliças – Rotação do sistema de coordenadas
● Cada elemento de barra foi deduzido no seu sistema de referência, além de ter apenas desloc. axiais.

Rotação do sistema de referência
● Sistema local faz um ângulo teta em relação ao sistema global;
● gl axial w, gls globais u e v
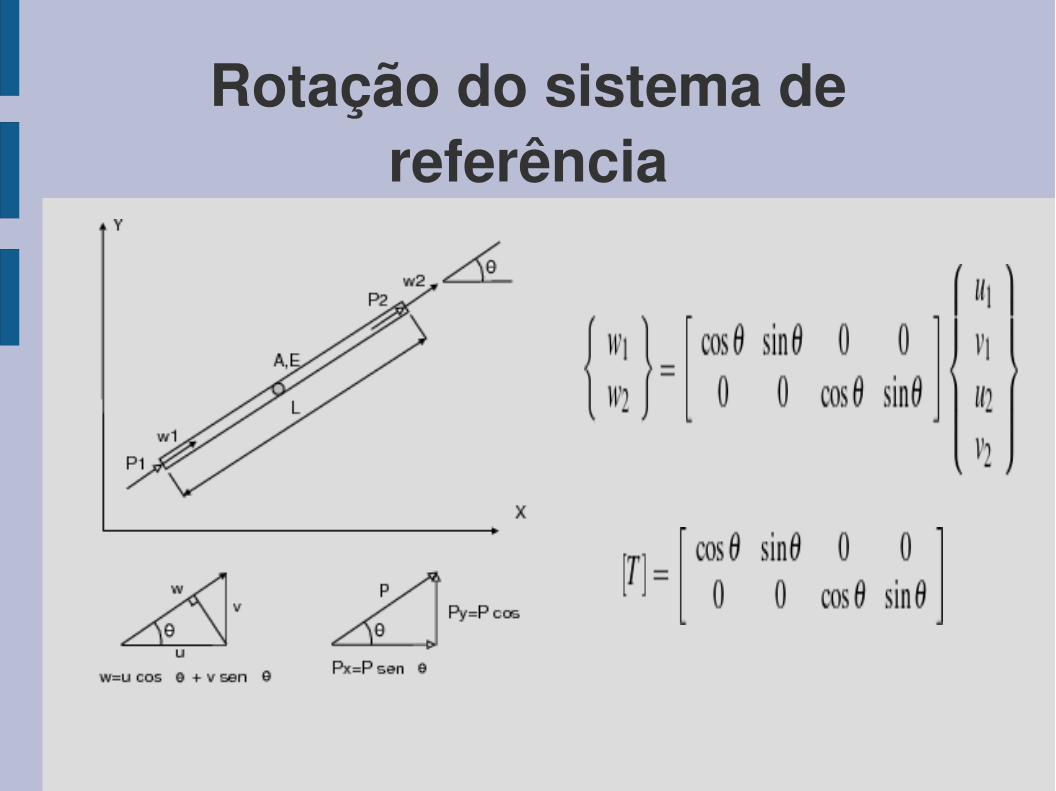
Rotação do sistema de referência

Rotação do sistema de coordenadas
● Primeiro rotacionamos os deslocamentos dos nós da barra (LOCAL>GLOBAL)

Rotação do sistema de coordenadas
● Depois rotacionamos as forças nos nós.

Rotação do sistema de coordenadas
Finalmente, rearranjamos o sistema, obtendo uma nova expressão para a matriz do elemento, agora em coord. globais.

Treliça

Treliça

Rotinas Rigidez_Barra(E,A,L):=(
block([Ke],
Ke: (E*A/L)*matrix([1,1],[1,1])
)
) $
Rotacao_Barra(teta):=(
block([T],
T: matrix([cos(teta),sin(teta),0,0], [0,0,cos(teta),sin(teta)])
)
) $
F_Global(nforcas,forcas,nnos):=(
block([F,i,nof,glf,valf],
F: genmatrix(lambda ([i, j], 0.0),2*nnos,1),
for i:1 thru nforcas do (
nof: forcas[i,1],
glf: forcas[i,2],
valf: forcas[i,3],
F[2*(nof1)+glf,1]: F[2*(nof1)+glf,1] + valf
),
F
)
) $






























