Embed Size (px)
Citation preview

Leticia Harumi MishimaLuciane Felix da SilvaRafael Brasil de AlmeidaRodrigo do Nascimento Moreira

PK
sT i
1
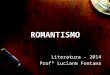
Sen sor
S is tem a1M
2MPK
S et-P oint
Ve Hé lice 2
Hé lice 1

O objetivo do projeto foi realizar o controle de posição de uma haste através de dois motores, posicionados nas extremidades da haste , onde um será a variável manipulada e, o outro, a variável controlada.


Por meio de uma linguagem de programação gráfica, elaborou-se um software de controle para o sistema físico projetado.
O software de controle criado no ambiente LabVIEW tinha sua estrutura lógica baseada no Controlador Proporcional+Integral (PI).
O software poderia ter sido criado a partir de um Controlador Proporcional. Ele não deixa de ser um meio poderoso de estabilização, mas se aplicado ao sistema, o controlador geraria uma resposta com erro de regime.

Um Controlador Integral também seria aplicável, uma vez que ele acaba com o erro de regime no tempo, sendo esta sua principal característica. A questão é que a resposta do controlador integral é muito lenta. São grandes erros em pequenos tempos, ou seja, haveria ação do controlador integral na presença de grandes desvios em um curto espaço de tempo.
Para resolver o problema de tempo de resposta, o Controlador Integral deve ser usado sempre junto ao Controlador Proporcional.

Depois de muitas tentativas sem êxito de tornar o sistema estável, através dos ajustes dos ganhos Kp e Ti, conseguiu-se encontrar valores dos ganhos onde a resposta do sistema não tendesse à instabilidade. Dessa forma foi visto que, o tempo de resposta do sistema era extremamente lento quando o ganho Ti era ajustado com um valor alto e isso fazia com que não se conseguisse alcançar a posição desejada da haste.

Por outro lado, a velocidade de resposta do sistema seria alta quando o ganho Ti fosse baixo. Só que mais uma vez o sistema tenderia a instabilidade e ainda acabaria saturando a saída, como foi observado.
Desse modo o ponto de equilíbrio foi alcançado usando-se o método de tentativa e erro e os ganhos foram ajustados conforme segue o próximo slide:


Interface do Programa com os parâmetros Kp e Ti ajustados

Foto1 foto2 foto3 foto4 foto5

AGRADECEMOS A ATENÇÃO DE TODOS.
MUITO OBRIGADO!


















![Luciane Viana Barros Pascoa[1]](https://img.document.onl/doc/110x75/55cf9b94550346d033a69a63/luciane-viana-barros-pascoa1.jpg)








