Embed Size (px)
Citation preview
UNIVERSIDADE ESTADUAL PAULISTA “JÚLIO DE MESQUITA FILHO"
CÂMPUS SOROCABA
INSTITUTO DE CIÊNCIA E TECNOLOGIA
ENGENHARIA DE CONTROLE E AUTOMAÇÃO
VINICIUS DIAS DADALTO
GALDENORO BOTURA JR.
Lógica Fuzzy aplicada ao controlador do ângulo de
passo de um aerogerador de eixo horizontal.
TRABALHO DE GRADUAÇÃO
1
Sorocaba
2017
VINICIUS DIAS DADALTO
GALDENORO BOTURA JR.
Lógica Fuzzy aplicada ao controlador do ângulo de
passo de um aerogerador de eixo horizontal.
Trabalho de graduação apresentado aocurso de Engenharia de controle e automa-ção, como parte dos requisitos necessáriosà obtenção do título de Engenheiro de con-trole e automação.
Orientador: Galdenoro Botura Jr.Coorientador: Antônio de Campos Junior
Área de Conhecimento: Controle e automa-ção
1
Sorocaba
2017
Ficha catalográfica elaborada pela Biblioteca da Unesp
Instituto de Ciência e Tecnologia – Câmpus de Sorocaba
Dadalto, Vinícius Dias.
Lógica fuzzy aplicada ao controlador do ângulo de passo de um aerogerador de eixo horizontal / Vinícius Dias Dadalto, 2017. 89 f.: il.
Orientador: Galdenoro Botura Junior.
Coorientador: Antônio de Campos Junior. Trabalho de Conclusão de Curso (Graduação) – Universidade Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba), 2017.
1. Controle fuzzy. 2. Ângulo de passo. 3. Geração eólica. 4. Aerogeradores. I. Universidade Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba). II. Título.
Bibliotecário responsável: Bruna Bacalgini – CRB 8/8855
Vinicius Dias DadaltoGaldenoro Botura Jr.
Lógica Fuzzy aplicada ao controlador do ângulo de passo de um aerogeradorde eixo horizontal.
IMPORTANTE: ESSE É APENAS UMTEXTO DE EXEMPLO DE FOLHA DEAPROVAÇÃO. VOCÊ DEVERÁ SOLICITARUMA FOLHA DE APROVAÇÃO PARA SEUTRABALHO NA SECRETARIA DO SEUCURSO (OU DEPARTAMENTO).
Trabalho aprovado. Sorocaba , DATA DA APROVAÇÃO:
Galdenoro Botura Jr.Orientador
ProfessorConvidado 1
ProfessorConvidado 2
Sorocaba
2017

Aos meus amados Pais e Irmãos, que fornecem amor infinito e acendem luzes em meucoração mesmo quando a noite é densa.

Agradecimentos
Agradeço primeiro ao Pai Celestial, que me guia e me fortalece nas batalhasdiárias.
À minha família que sempre me apoiou em todos os momentos de minha vida.
Ao Professor Galdenoro pela confiança a mim depositada no desenvolvimentodesse trabalho e pela amizade a ser levada para sempre.
A Antonio de Campos pela amizade e orientação no desenvolvimento do traba-lho.
A Everson Martins e Thiago de Almeida Oliveira por aceitarem compor a bancaavaliadora.
A todos os amigos que Deus colocou em meu caminho. Anjos de luz enviadospor Deus para comigo compartilhar momentos incríveis nesse plano.
A todos os colaboradores da Unesp Sorocaba, por dia após dia buscarem aexcelência em seus trabalhos.

É fácil apagar as pegadas. Difícil é caminharsem tocar o chão. (Lao-Tsé)
Resumo
Este trabalho tem como base o desenvolvimento de um controlador de ângulo de passo,utilizando lógica fuzzy. Esse controlador foi implementado na plataforma Fuzzy LogicToolbox disponível no software Matlab. A metodologia de desenvolvimento teve comobase os conhecimentos acerca do comportamento de aerogeradores de eixo horizontal.A lógica de controle desenvolvida conta com dois controladores fuzzy que monitoram asvariáveis erro da potência, derivada do erro da potência, erro da velocidade do rotor dogerador e derivada do erro da velocidade do gerador. O objetivo do trabalho é avaliar ocomportamento do desempenho do controlador em situações de perturbação no ventoincidente no aerogerador e comparar os resultados com o controle original presente nomodelo utilizado como base. Para tal foram simuladas duas situações de distúrbios. Assimulações foram realizadas na plataforma Simulink do software Matlab, e comprovama eficiência dessa estratégia de controle para limitar a potência gerada pelo modelo daturbina eólica.
Palavras chave: Controle fuzzy, ângulo de passo, geração eólica, aerogeradores.

Abstract
This work is based on the development of a pitch angle controller using fuzzy logic.This controller have been implemented in the Fuzzy Logic Toolbox platform available inMatlab software. The development methodology was based on the knowledge aboutthe behavior of horizontal axis aerogenerators, acquired through a bibliographic survey.The developed control logic has two fuzzy controllers monitoring the variables powererror, derived from power error, generator rotor speed error and derived from generatorspeed error. The main goal of this work is to evaluate the performance of the controllerin situations of wind disturbance in the aerogenerator and compair the results with theoriginal control available on the base model. For this, two disturbance situations weresimulated. The simulations were carried out on the Simulink platform of the Matlabsoftware, and demonstrate the efficiency of this control strategy to limit the powergenerated by the wind turbine model.
Key words: Fuzzy control, pitch angle, wind generation, wind turbines.

Lista de ilustrações
Figura 1 – Capacidade de energia eólica instalada ao redor do mundo (MW) . 19Figura 2 – Topologia gerador de indução conectado diretamente à rede . . . . 22Figura 3 – Topologia utilizando gerador síncrono com imãs permanentes . . . . 24Figura 4 – Topologia utilizando gerador de indução duplamente alimentado . . 25Figura 5 – Sessão transversal de uma pá de um aerogerador . . . . . . . . . . 27Figura 6 – Representação do fluxo de ar através do aerogerador . . . . . . . . 28Figura 7 – Curvas da relação entre o coeficiente de potência, ângulo de passo
e relação de velocidades. . . . . . . . . . . . . . . . . . . . . . . . . 33Figura 8 – Curva de potência genérica de um aerogerador de eixo horizontal . 34Figura 9 – LCurva de extração máxima de potência - Relação entre potência e
velocidade do eixo do gerador . . . . . . . . . . . . . . . . . . . . . 36Figura 10 – Diagrama de controle PI do ângulo de passo utilizando lógica . . . . 39Figura 11 – Funções de pertinência para variáveis de entrada . . . . . . . . . . 42Figura 12 – Funções de pertinência para variáveis de saída . . . . . . . . . . . . 43Figura 13 – Operador fuzzy - funções de pertinência . . . . . . . . . . . . . . . . 44Figura 14 – Operador fuzzy - Resultado do operador or (max) . . . . . . . . . . 44Figura 15 – Operador fuzzy - Resultado do operador and (min) . . . . . . . . . . 45Figura 16 – Estrutura geral de um sistema de controle fuzzy . . . . . . . . . . . 46Figura 17 – Processo de fuzificação . . . . . . . . . . . . . . . . . . . . . . . . . 46Figura 18 – Exemplo de processo de inferência - Método Mamdani . . . . . . . . 48Figura 19 – Exemplo de processo de inferência - Método Takagi - Sugeno . . . . 48Figura 20 – Processo de defuzificação . . . . . . . . . . . . . . . . . . . . . . . . 50Figura 21 – Resultado defuzificação - Método dos máximos . . . . . . . . . . . . 50Figura 22 – Resultado defuzificação - Método centróide . . . . . . . . . . . . . . 51Figura 23 – Modelo da turbina eólica . . . . . . . . . . . . . . . . . . . . . . . . . 54Figura 24 – Característica do coeficiente de potência da turbina . . . . . . . . . 54Figura 25 – Característica do coeficiente da turbina em função de lambda (relação
de velocidades) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Figura 26 – Diagrama geral do controle utilizado no aerogerador presente no
modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 27 – Controlador do ângulo de passo original disposto no modelo da turbina 57Figura 28 – Controlador do ângulo de passo utilizando lógica fuzzy . . . . . . . 59Figura 29 – Funções de pertinência do controlador fuzzy que monitora o erro e
derivada do erro da velocidade angular do eixo do rotor. . . . . . . . 60Figura 30 – Funções de pertinência do controlador fuzzy que monitora o erro e
derivada do erro da potência do eixo do rotor. . . . . . . . . . . . . . 60

Figura 31 – Dinâmica da resposta de um processo de segunda ordem ao degrauunitário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Figura 32 – Regras fuzzy para controlador do ângulo de passo a partir da veloci-dade de giro do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Figura 33 – Regras fuzzy para controlador do ângulo de passo a partir da Potência 62Figura 34 – Resposta da potência ativa, velocidade de rotação e ângulo de passo
a partir da ação do controlador original do modelo e do controle fuzzypara um degrau de vento indo de 11 m/s a 15 m/s . . . . . . . . . . 66
Figura 35 – Comportamento do erro da velocidade de rotação e erro da potênciamedida para um degrau de vento indo de 11 m/s a 15 m/s . . . . . . 66
Figura 36 – Sinal de saída do controlador original do modelo e do controladorfuzzy para um degrau de vento indo de 11 m/s a 15 m/s . . . . . . . 67
Figura 37 – Resposta do torque mecânico, coeficiente de potência e relação develocidades do controlador originais do modelo e do controlador fuzzypara um degrau de vento indo de 11 m/s a 15 m/s . . . . . . . . . . 67
Figura 38 – Resposta do erro da velocidade de rotação e erro da potência medidapara um degrau de vento indo de 11 m/s a 22 m/s . . . . . . . . . . 69
Figura 39 – Resposta do erro da velocidade de rotação e erro da potência medidapara um degrau de vento indo de 11 m/s a 22 m/s . . . . . . . . . . 69
Figura 40 – Sinal de saída do controlador original do modelo e do controladorfuzzy para um degrau de vento indo de 11 m/s a 22 m/s . . . . . . . 70
Figura 41 – Resposta do torque mecânico, coeficiente de potência e relação develocidades do controle fuzzy para um degrau de vento indo de 11m/s a 22 m/s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figura 42 – Moínhos de vento antigos - Pérsia e China . . . . . . . . . . . . . . 78Figura 43 – Moinho de vento de eixo horizontal - Post windmill . . . . . . . . . . 79Figura 44 – Ordem cronológica dos moinhos de vento . . . . . . . . . . . . . . . 80Figura 45 – Moinho de vento de eixo horizontal - American windmill séc XIX . . 81Figura 46 – Ilustração de um aerogerador de eixo horizontal e seus principais
componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85

Lista de tabelas
Tabela 1 – Capacidade de energia instalada por estado em 2016 (MW) . . . . 20Tabela 2 – Exemplo de parâmetros para a equação do coeficiente de potência 32Tabela 3 – Parâmetros do controlador da turbina eólica . . . . . . . . . . . . . . 58

Lista de abreviaturas e siglas
AC Ativo Circulante
C1 Coeficiente 1
C2 Coeficiente 2
C3 Coeficiente 3
C4 Coeficiente 4
C5 Coeficiente 5
C6 Coeficiente 6
C7 Coeficiente 7
C8 Coeficiente 8
C9 Coeficiente 9
CA Corrente Alternada
CC Corrente contínua
EUA Estados Unidos da América
GE General Eletric
GI Gerador de Indução
MVA Mega Volt-Ampere
MW Megawatt
NM Negativo médio
NS Negativo pequeno
PD Proporcional Derivativo
PI Proporcional Integral
PID Proporcional Integral Derivativo
PL Positivo Grande
PM Positivo médio
PS Positivo pequeno
SE SISTEMA ESPECIALISTA
USD Dólares Americanos
V1 Velocidade do fluxo de vento antes de atingir as pás do aerogerador
V2 Velocidade do fluxo de vento depois de atingir as pás do aerogerador
ZE Zero
Sumário
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.1.1 Panorama global da energia eólica . . . . . . . . . . . . . . . . . . 181.1.2 Panorama da energia eólica no Brasil . . . . . . . . . . . . . . . . 191.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 CONCEITUAÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.1 Configuração de aerogeradores a partir do gerador elétrico: . . 222.1.1 Sistemas de velocidade fixa . . . . . . . . . . . . . . . . . . . . . . 222.1.2 Sistemas de velocidade variável . . . . . . . . . . . . . . . . . . . 232.2 A captação da energia eólica . . . . . . . . . . . . . . . . . . . . . 262.2.1 Forças atuantes nas pás da turbina . . . . . . . . . . . . . . . . . . 272.2.2 Potência de uma turbina eólica . . . . . . . . . . . . . . . . . . . . 282.2.3 Curva de potência . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.2.4 Trajetória de máxima potência . . . . . . . . . . . . . . . . . . . . . 352.2.5 Controle de potência . . . . . . . . . . . . . . . . . . . . . . . . . . 372.2.5.1 Controle por estol passivo . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.5.2 Controle por estol ativo . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.2.5.3 Controle ativo do ângulo de passo . . . . . . . . . . . . . . . . . . . . 38
2.3 Lógica Fuzzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.3.1 Conjuntos fuzzy e funções de pertinência . . . . . . . . . . . . . . 412.3.2 Operações entre conjuntos fuzzy . . . . . . . . . . . . . . . . . . . 432.3.3 Sistemas de controle fuzzy . . . . . . . . . . . . . . . . . . . . . . 45
3 LEVANTAMENTO DO ESTADO DA ARTE . . . . . . . . . . . . . . . 52
4 MATERIAIS E MÉTODOS . . . . . . . . . . . . . . . . . . . . . . . . 534.1 Descrição geral do modelo utilizado para simulações . . . . . . . 534.2 Descrição do modelo da turbina eólica . . . . . . . . . . . . . . . . 544.3 Descrição do modelo de controle do Aerogerador . . . . . . . . . 554.3.1 Descrição do modelo do Controlador do ângulo de passo origi-
nal (P + PI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.3.2 Modelagem do controlador do ângulo de passo proposto utili-
zando lógica fuzzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5 RESULTADOS E DISCUSSÃO . . . . . . . . . . . . . . . . . . . . . 64

6 CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
ANEXOS 77
ANEXO A – HISTÓRICO DA ENERGIA EÓLICA . . . . . . . . . . . 78
ANEXO B – AEROGERADORES E SEUS COMPONENTES . . . . 84
16
1 Introdução
A energia, nas suas mais diversas formas, foi essencial ao desenvolvimentoda espécie humana. Conforme o homem compreendeu sua utilidade em aplicaçõesde seu cotidiano, como por exemplo, a energia do fogo para o preparo de alimentosou a energia mecânica da tração animal, águas ou ventos para moagem de grãose propulsão de barcos, foi capaz de beneficiar os recursos disponíveis na naturezacriando subsídios para seu desenvolvimento.
Com as revoluções industriais nos séculos XVIII e XIX a demanda por recur-sos energéticos aumentou muito, culminando em um grande salto na utilização decombustíveis fósseis como o carvão mineral e mais tarde o petróleo no século XX.Apesar de já existir conhecimento a respeito de recursos energéticos renováveis, a altadisponibilidade das fontes de combustíveis fósseis tornou tais recursos muito viáveiseconomicamente, desencorajando pesquisas alternativas como a energia eólica esolar (BOYLE, 2004).
De acordo com relatório (SECRETARIAT, 2017), atualmente três quartos daenergia elétrica gerada no mundo provém de fontes não renováveis. Contudo, inves-timentos em fontes renováveis são crescentes ano após ano, enquanto é possívelobservar uma estagnação dos investimentos em capacidade de geração baseada emcombustíveis fósseis. Entre outras razões, isso é resultado de iniciativas globais como intuito de descontinuar o uso de combustíveis fósseis como carvão mineral e petró-leo, em benefício do meio ambiente. Pode-se citar como exemplo dessas iniciativasa Conferência das Partes sobre Mudança do Clima (COP-22) realizada em Marrakesh,Marrocos. Na ocasião, 48 nações se reuniram para discutir a metodologia a ser adotadapara alcançarem os objetivos acordados no Acordo de Paris (COP-21) realizado em2015 (BRASIL, 2016).
Contudo, apesar das iniciativas em benefício do desenvolvimento das fontesde energias renováveis e consequente redução de gases de efeito estufa na atmos-fera, alguns desafios ainda prejudicam esse mercado, visto que o preço do barril depetróleo em queda e o recente posicionamento dos Estados Unidos com o PresidenteDonald Trump a respeito do carvão mineral ainda incentivam a utilização de tais fontesenergéticas (RYAN, 2017).
Fatores que podem ser citados como incentivos ao investimento em energiasrenováveis são a alta disponibilidade de recursos energéticos em diversos países ea constante queda nos custos de geração. Além das políticas de incentivo a fontesde energia renovável, os avanços tecnológicos também contribuem para redução de
Capítulo 1. Introdução 17
tais custos. No caso da energia eólica, a modernização de componentes eletrôni-cos, materiais, novas tecnologias de fabricação e otimização do espaço físico emsitios eólicos, permitem a construção de aerogeradores mais robustos, eficientes ede maior dimensão energética. A evolução das turbinas eólicas mostra o aumentoda capacidade de geração de 300 kW no começo dos anos 90 para atuais 7,5 MWem turbinas instaladas em terra e 9,5 MW em turbinas instaladas no mar (FRANK-FURT SCHOOL OF FINANCE MANAGEMENT GGMBH, 2017).
Dentre diversos avanços tecnológicos que impulsionaram a indústria de geraçãoeólica no decorrer de seu desenvolvimento, um grande marco foi o surgimento dos mo-delos de aerogeradores que operam em regime de velocidade variável. Essa tecnologiapermite maior eficiência energética através de sistemas de controle que, de acordocom a velocidade do vento que incide no aerogerador, ajustam a velocidade de rotaçãodo eixo do rotor da turbina para que a captação de energia seja ótima (PATEL, 2006).
Diversas técnicas de controle são aplicadas aos aerogeradores, e muitas novastecnologias de controle vem sendo desenvolvidas. Este trabalho aborda um compa-rativo entre os resultados obtidos pelas lógicas de controle P e PI com um controlebaseado em lógica Fuzzy, ambos aplicados ao controlador de ângulo de passo deum aerogerador de eixo horizontal. Os resultados da comparação são obtidos atravésde simulações realizadas em um modelo de sítio eólico disponível na biblioteca daplataforma Simulink no software Matlab.
1.1 Motivação
Alguns dos grandes desafios de nosso século são as ameaças das mudançasclimáticas e a necessidade de atender a crescente demanda energética. Lidar comesses problemas, além de transmitir a consciência ambiental sobre o tema às próximasgerações, é responsabilidade de todas as nações que coabitam o planeta. Frente oconstante aumento populacional, é necessário o investimento em novas tecnologias degeração energética, garantindo eficiência e segurança na geração e dos suprimentosde energia.
A energia eólica é uma das tecnologias de geração mais eficazes atualmente. Écapaz de ser instalada em larga escala, contribuindo muito para a solução das dificulda-des supracitadas. Com uma infraestrutura extremamente versátil, comparada à outrastecnologias convencionais de geração, um parque eólico é capaz de ser rapidamenteinstalado, por sua característica modular, permitindo rápido retorno financeiro aosinvestimentos aplicados.
O vento é recurso ilimitado na maior parte dos países do mundo, sendo umafonte energética totalmente limpa e abundante. Sem significativos impactos ambientais,
Capítulo 1. Introdução 18
geração de resíduos e sem dependência de mercados e políticas de preço de combus-tíveis, a energia eólica oferece maior segurança econômica à cadeia de geração comoum todo.
Os avanços tecnológicos nos permitem solucionar desafios cada vez maiores.A lógica fuzzy por exemplo, é uma técnica de inteligência artificial que permite omodelamento de controladores, mesmo que não haja um modelo matemático doprocesso a ser controlado, apresentando alta versatilidade, podendo ser utilizada emdiversas aplicações.
Este trabalho parte da ideologia de que as novas tecnologias disponíveis nomercado possibilitam avanços nos projetos de geração de energia. Dessa forma, épossível que o mundo disponha de fontes energéticas que impactem cada vez menosno meio ambiente, objetivando maior rentabilidade e eficiência.
1.1.1 Panorama global da energia eólica
A energia eólica e sua tecnologia evoluíram muito desde os primeiros protótiposde larga escala de geração, há quase 40 anos atrás. Os progressos tecnológicos fazemdessa fonte energética extremamente rentável. Atualmente, uma única turbina é capazde gerar 200 vezes mais potência que uma turbina de mesmo porte há décadas atrás.Isso, entre outros fatores, atrai cada vez mais investidores no mundo todo.
Segundo o relatório do (GWEC, 2016), o ano de 2016 não foi tão promissor parao mercado eólico mundial como foi em 2015. Apesar de instalados mais de 50 GWde energia no mundo todo, o mercado eólico sofreu uma pequena queda comparadoao ano anterior, não atendendo as expectativas criadas em 2015, que teve no total60 GW instalados no mundo todo. Essa queda é justificada pelo desempenho domercado chinês e de mercados menores como Brasil, México, Canadá e Africa do Sul.A China, apesar de não ter atingido a totalidade de suas projeções, contribuiu com 23GW instalados em 2016, sendo esse o maior desempenho dentre todos os países domundo nesse ano. Na divisão por regiões, a Ásia fica na primeira posição com 27,7 GWinstalados, seguidos de Europa com 13,9 GW, América do Norte com 9,3 GW, AméricaLatina e Caribe com 3 GW, África com 418 MW e países do Pacífico com 140 MW.

Capítulo 1. Introdução 19
Figura 1 – Capacidade de energia eólica instalada ao redor do mundo (MW)
GWEC 2016
A figura 1 mostra a capacidade instalada acumulada no mundo entre 2001 e2016. É nítida a evolução do mercado no período observado. A contínua queda noscustos de instalação dos parques eólicos contribui para que as projeções de mercadocontinuem positivas. Os custos das instalações de sitios eólicos offshore (instalados nomar) superaram as metas de redução estipuladas, atingindo USD 58,90/MWh em 2016,quando se projetava atingir USD 215,00/MWh até 2020. Assim, as expectativas para omercado mundial continuam promissoras, com aumento da capacidade instalada paraos próximos anos.
1.1.2 Panorama da energia eólica no Brasil
Segundo (FADIGAS, 2011), o desenvolvimento do mercado eólico brasileiroteve significativa melhoria em 2002, quando foi aprovada a Lei n. 10.438 que criou oProinfa (Programa de Incentivos às Fontes Alternativas de Energia) - sendo o primeirogrande marco ao desenvolvimento de tecnologias para geração a partir de fontes reno-váveis. O programa foi dividido em duas etapas: Proinfa (com meta de ampliação de3.300 MW, divididos entre energia eólica, biomassa e pequenas centrais hidroelétri-cas até o fim de 2006) e Proinfa 2 (com meta de fixar em 10% a representação dasfontes renováveis citadas na cadeia energética brasileira).
Após 14 anos desde a criação do programa, o Brasil lidera a subdivisão demercado ao qual pertence, em capacidade de geração instalada. Apesar das dificul-dades impostas pela política e economia brasileira no ano de 2016, um substancialcrescimento do mercado eólico foi mantido no ano, graças a projetos contratados nosanos anteriores, indo de 8,7 GW instalados em 2015 para 10,7 GW em 2016. Essaadição de 2 GW na matriz eólica brasileira representa um investimento de 5,4 bilhõesde dólares, com a instalação de 947 novas turbinas divididas entre 81 sítios eólicos,gerando 30.000 novos empregos para a cadeia produtiva. Contudo, parte dessa ca-pacidade instalada, apesar de já comissionada, não possui conexão com a rede de

Capítulo 1. Introdução 20
distribuição, sendo esse um dos problemas para viabilizar novos projetos na geraçãoeólica Brasileira. A tabela abaixo mostra a capacidade de energia eólica instalada noBrasil, dividida por estado (GWEC, 2016) .
Tabela 1 – Capacidade de energia instalada por estado até o fim de 2016 (MW)
Estado Capacidadeinstalada
Número defazendaseólicas
Rio Grande doNorte 3,420 125
Bahia 1,898 73
Ceará 1,789 68
Rio Grande doSul 1,695 72
Piauí 915 33
Pernambuco 651 29
Santa Catarina 239 14
Paraíba 69 13
Sergipe 35 1
Rio de Janeiro 28 1
Paraná 3 1
Total 10,742 430
GWEC 2016
Outro desafio que o setor eólico brasileiro vem enfrentando é a falta de demandaenergética. Por conta da crise político econômica instalada no país, o consumo dapopulação diminuiu, reduzindo por consequência a produção industrial. O BNDES re-portou em 2016, que manteria as condições de financiamento de projetos eólicos, sobas mesmas condições acordadas anteriormente, contudo os financiamentos foram pa-ralisados. Em 2016 nenhum leilão para concessão de parques eólicos foi realizado, sobjustificativa da falta de demanda energética. Para o mercado como um todo, segundo aABEEólica, é um risco grande estar sob essas condições, visto que no momento emque o mercado brasileiro se reaquecer, precisará de energia e isso pode requerer ouso de energia térmica, que é mais cara que a eólica (GWEC, 2016).
Para 2017, os maiores desafios do setor ainda serão a falta de demanda energé-

Capítulo 1. Introdução 21
tica e infraestrutura de transmissão. Porém, apesar do quadro não parecer promissor,outros novos 2 GW de capacidade instalada estão previstos até o fim de 2017, graçasa leilões e contratos firmados nos anos anteriores.
1.2 Objetivos
Os principais objetivos desse trabalho são:
• Avaliar o estado da arte de turbinas eólicas, bem como os métodos de controledo ângulo de passo através de lógica fuzzy atualmente utilizados.
• Analisar e descrever o funcionamento do modelo Wind Farm Average Modedisponível na biblioteca da plataforma simulink.
• Implementar um controlador do ângulo de passo utilizando Lógica Fuzzy comoalternativa aos controladores convencionais utilizados no modelo.
• Avaliar a influência das regras fuzzy, utilizadas no controlador, na velocidade doeixo do rotor e potência ativa gerada.
• Comparar os resultados obtidos utilizando o controlador original do modelo (con-trole proporcional e controle proporcional integral) com os resultados obtidos pelocontrolador fuzzy proposto.

22
2 Conceituação
2.1 Configuração de aerogeradores a partir do gerador elétrico:
2.1.1 Sistemas de velocidade fixa
• Gerador de indução
Na década de 70 até a década de 90 as principais configurações de aerogera-dores utilizadas eram as de velocidade fixa. Essa configuração de turbina ainda existeatualmente no mercado, contudo com menor utilização frente as novas e mais eficientestecnologias disponíveis. O gerador usualmente empregado para a construção de umaturbina eólica de velocidade fixa é o gerador de indução (GASCH; TWELE, 2012).
A utilização do gerador de indução (GI) para velocidade fixa tem vantagenscomo reduzido custo, por não utilizar conversores de potência, sendo que a frequênciade rotação do sistema é fixada na frequência da rede elétrica, grande robustez, comreduzidas manutenções no gerador e simplicidade de operação do gerador de induçãocomparado a outros geradores. Contudo, existem algumas desvantagens com a utiliza-ção desta configuração, como limitada eficiência aerodinâmica não permitindo controleda extração de potência, o que os torna não tão rentáveis, constante manutenção dacaixa de transmissão de velocidades (ACKERMANN, 2005).
Figura 2 – Topologia utilizando gerador de indução conectado diretamente à rede
André Vicente 2013
A figura 2 ilustra a configuração de uma turbina eólica de velocidade fixa, coma utilização de um gerador de indução do tipo rotor em gaiola. Nessa configuração, oestator do gerador é conectado diretamente à rede. Através da alteração do númerode polos de alguns geradores desse tipo, é possível a operação em duas velocidadesdistintas (VICENTE, 2013).

Capítulo 2. Conceituação 23
Nessa configuração é possível limitar a velocidade de giro do rotor, quando oaerogerador está submetido a fortes ventos, através do controle aerodinâmico pelofenômeno estol passivo, que será detalhado nos próximos capítulos.
A caixa de velocidades (gear-box) é responsável pelo acoplamento do eixo daturbina ao eixo do gerador elétrico, alterando a velocidade de rotação para se adequara geração. É possível que algumas configurações desse tipo apresentem um circuitode soft-starter entre o estator e a rede elétrica. Seu objetivo é conectar o gerador àrede durante o acionamento do sistema. O banco de capacitores, disposto em paralelocom a conexão, compensa a energia reativa consumida pelo gerador, utilizada paraexcitação do campo magnético do entreferro (VOLTOLINI, 2007) .
2.1.2 Sistemas de velocidade variável
As turbinas eólicas, que atuam em regime de velocidade variável, geralmenteutilizam geradores síncronos de ímãs permanentes ou geradores de indução dupla-mente alimentados. Comparadas às turbinas de velocidade fixa, as configurações emvelocidade variável são mais eficientes, pois, associadas ao controle do ângulo daspás, permitem o controle de velocidade de rotação do rotor do gerador e consequente-mente o controle da potência extraída(MENDES, 2009).
Algumas configurações desse tipo não utilizam caixas de engrenagens. O gera-dor aplicado para esse caso possui um grande número de polos, o que compensa abaixa velocidade de giro do rotor do gerador. Isso traz como vantagem a não necessi-dade de investimento em uma caixa de velocidades, nem dos custos de manutençãoenvolvidos. Porém, em aerogeradores de velocidade variável é necessária a utilizaçãode conversores de potência, o que eleva os custos de projeto em comparação comturbinas de velocidade fixa, apesar da melhoria na eficiência de geração compensaro investimento, pois o aerogerador passa a ter a capacidade de operar em potênciamáxima por mais tempo. Outra vantagem em regular a velocidade do aerogeradoré a amenização dos estresses mecânicos, aos quais os elementos que compõem oaerogerador estão submetidos, e a redução dos ruídos sonoros gerador (FADIGAS,2011) .
• Gerador síncrono de ímãs permanentes
A figura 3 ilustra uma turbina eólica em configuração que utiliza um geradorsíncrono de ímãs permanentes. Nessa configuração o eixo do rotor da turbina éacoplado diretamente ao eixo do rotor do gerador, que possui um grande númerode polos, viabilizando a geração de energia frente a reduzida velocidade de rotaçãodo eixo. O estator da máquina possui bobinas monofásicas ou trifásicas, através

Capítulo 2. Conceituação 24
das quais é induzida a tensão a partir do giro do rotor. O gerador é conectado àrede por intermédio de um conversor de potência que, através do chaveamento desemicondutores, permite o controle da velocidade pela regulação de frequência etensão entregue ao estator (GASPAR, 2013).
Figura 3 – Topologia utilizando gerador de síncrono com ímãs permanentes
André Vicente 2013
Uma vantagem dessa configuração é não ser necessária a presença de anéisdeslizantes e escovas para transmitir energia de modo a excitar o rotor, visto que nesteestão presentes os ímãs que gerarão o campo magnético na máquina. Outras vanta-gens podem ser citadas, como redução dos custos por não necessidade dos sistemasde excitação e comutação; redução de perdas por efeito joule por não haver correntesno rotor; devido sua alta densidade de potência gerada, é possível obter determinadaquantidade de energia a partir de um aerogerador mais compacto; menor necessidadede manutenção, por não utilização de caixas de engrenagens (GASPAR, 2013).
Como a excitação eletromagnética é realizada pelos ímãs dispostos no rotor,não é possível o controle do fluxo do campo, como também não é possível o controle dapotência reativa gerada. Outra desvantagem é que o conversor disposto na configuraçãoprecisa possuir a mesma capacidade de potência do gerador, fazendo com que seuvolume aumente consideravelmente, assim como seu custo. melhor relação entredimensões/potência gerada, pois é uma máquina mais compacta e robusta, quandocomparada às máquinas de rotor bobinado. Contudo, a maior desvantagem para essetipo de equipamento é o custo dos ímãs empregados. Por serem fabricados commateriais de alto custo, como ferro neodímio e cobalto, esse tipo de gerador torna-seeconomicamente inviável para aplicações de alta escala de geração (ACKERMANN,2005).
• Gerador de indução duplamente alimentado
A figura 4 ilustra uma turbina eólica de velocidade variável, que utiliza umgerador de indução duplamente alimentado. Trata-se de um gerador de indução de

Capítulo 2. Conceituação 25
rotor bobinado associado a um conversor de potência CA/CC/CA, em configuraçãoconhecida como back-to-back. Nessa configuração, tanto o rotor quanto o estator sãoconectados à rede de distribuição intermediados pelo conversor(MENDES, 2009).
Essa configuração back-to-back é uma composição de dois conversores conec-tados por um barramento CC. No caso da conexão com a rede através do rotor, osenrolamentos são conectados à um dos lados do conversor (conversor do lado do rotor).Da mesma forma, o estator é conectado a rede de distribuição, contudo é intermediadopelo outro lado do conversor (conversor do lado do estator) (U.S. DEPARTMENT OFENERGY, 2008).
Na dinâmica de um gerador elétrico, a diferença entre a velocidade de rotação doeixo do rotor e entre a velocidade de rotação do campo girante do estator é chamada deescorregamento. Essa diferença representa a frequência CA entregue ao enrolamentodo rotor. Nas proximidades do limite de sua potência nominal, o gerador trabalharásob uma velocidade 20% acima da velocidade nominal do equipamento. Sendo que,o controle da frequência de excitação do rotor permite que este opere com umavelocidade de rotação em uma faixa de -30% a +30% (VOLTOLINI, 2007).
A potencia ativa é dividida entre os enrolamentos do rotor e do estator, segundoproporção estabelecida pela frequência de escorregamento. Sob velocidades de rotaçãoacima da síncrona, a potência ativa do rotor é injetada na rede pelo conversor.
Figura 4 – Topologia utilizando gerador de indução duplamente alimentado
André Vicente 2013
Assim como nas outras configurações, o gerador é acionado mecanicamentepelo eixo da turbina, contudo, o eixo do rotor do gerador funciona com velocidadesmuito acima da desenvolvida pelo eixo da turbina. Dessa forma, para multiplicar avelocidade de rotação da turbina, uma caixa de engrenagens é utilizada para transmitira rotação ao eixo do rotor, permitindo maior capacidade de geração.
O gerador é excitado pelo circuito do rotor, que recebe energia através de

Capítulo 2. Conceituação 26
anéis deslizantes e escovas de carvão, pelos quais podem ser transmitidas correntescontínuas ou alternadas.
Segundo(MENDES, 2009), esse tipo de gerador é o mais difundido atualmentena industria eólica de média e alta potência. Isso se deve principalmente pela suaversatilidade em operação sob diferentes regimes de vento, pois a partir do conversor,é possível um amplo controle da velocidade de giro do rotor, extraindo o máximo depotência, independente do regime de vento incidente. Outra vantagem desse tipo deconfiguração é a capacidade de absorver ou gerar potência reativa a partir do gerador,eliminando a necessidade de utilização de bancos de capacitores, como acontececom os geradores de indução tipo gaiola de esquilo. O conversor empregado nessaconfiguração possui tamanho reduzido comparado a conversores empregados emoutras topologias, sendo projetado somente para uma porcentagem da potência dogerador. Isso reflete em redução do custo desse equipamento, bem como em volume,peso e perdas para o sistema como um todo.
Como desvantagem desse tipo de equipamento pode ser considerada a utiliza-ção da caixa de transmissão de velocidades, bem como anéis deslizantes e escovas,pois estes são elementos que representam risco de falha. Dessa forma, necessitamreceber manutenção e vistorias periódicas, o que encarece os custos operacionais deum parque eólico por exemplo, dado que estes geralmente possuem vários aerogera-dores, que muitas vezes são de difícil acesso, como por exemplo os aerogeradoresoff-shore (instalados nos mares)(FADIGAS, 2011) .
2.2 A captação da energia eólica
Segundo (MANWELL; MCGOWAN, 2009) , a energia elétrica gerada por aero-geradores é produto da conversão da força do vento em torque no eixo do rotor daturbina, que desencadeará a produção de potência no gerador. Sendo que, a eficiênciaenergética é diretamente dependente dos aspectos aerodinâmicos das forças geradaspela velocidade média dos ventos e suas flutuações.
Em operação, os elementos mecânicos que compõem o aerogerador estãosujeitos a desgastes por fadiga, originados por sobrecargas na velocidade do ventoou por vibrações geradas no próprio funcionamento do equipamento. Tais fatores sãode extrema importância no que diz respeito ao tempo de vida útil do equipamento ecustos com realização de manutenções, podendo impactar profundamente a viabilidadedo projeto de um aerogerador. Contudo, apesar da importância do efeito dessasturbulências e esforços na operação real de uma turbina eólica, este trabalho, porefeitos de simplificação, desconsidera esses efeitos nos cálculos apresentados noscapítulos presentes(FADIGAS, 2011) .

Capítulo 2. Conceituação 27
Neste capítulo serão apresentados conceitos referentes a aerodinâmica dosaerogeradores de eixo horizontal de três pás, modelo mais difundido na industria degeração eólica. Serão apresentadas também as equações que definem o modelo degeração de potência e suas principais características.
2.2.1 Forças atuantes nas pás da turbina
As pás de um aerogerador são fabricadas com alta tecnologia de materiais eprocessos, seguindo perfis indicados para regimes específicos de vento e quantidade depotência gerada. Isso pelo fato da aerodinâmica das pás estar diretamente relacionadacom o torque entregue ao eixo do rotor do gerador.
Na figura 5 são apresentadas as principais forças imposta às pás dos aeroge-radores durante o funcionamento. O vento incide no perfil da pá gerando uma força Fque é decomposta em duas componentes: força de sustentação e força de arrasto.
A força de sustentação é originada a partir da diferença de pressão entre a partesuperior e inferior do perfil da pá, em decorrência da velocidade do fluxo de vento sermaior na parte superior, diminuindo a pressão nessa região. O que gera portanto, umaforça perpendicular a superfície das pás. Já a força de arrasto é gerada pela passagemdo ar sobre a superfície da pá, atuando paralelamente as mesmas (VICENTE, 2013).
Figura 5 – Seção transversal de uma pá de um aerogerador
National Renewable Energy Laboratory (2008)

Capítulo 2. Conceituação 28
2.2.2 Potência de uma turbina eólica
A captação de energia pelo aerogerador tem início com o fluxo de ar que atingea área circular “varrida” pelas pás da turbina. A equação 2.1 apresenta a expressãoda potência presente nos ventos, sendo essa uma função entre a velocidade do ventonão perturbado (vento que se aproxima do aerogerador, antes de atingir as pás), adensidade do ar e a área de captação. Ao encontrar as pás da turbina como obstáculo,o vento sofre alterações e parte de sua energia cinética é transformada em potênciamecânica (em Watts) originando um conjugado no eixo da turbina (FADIGAS, 2011).
P =1
2.ρ.A.v3 (2.1)
Em que ρ é a densidade do ar, A é a área varrida pelas pás e v é a velocidadedo vento não perturbado.
A figura 6 representa a passagem do fluxo de ar por um aerogerador. Observeque a área ocupada pelo fluxo de ar aumenta após passar pelas pás da turbina. Issoé explicado a partir da lei de continuidade de fluxo, pois ao passar pelo aerogerador,ocorre uma redução na velocidade do ar com consequente aumento da área do fluxo(AMÊNDOLA, 2007).
Figura 6 – Representação do fluxo de ar através do aerogerador
Eliana Fadigas 2011
Esse efeito pode ser demonstrado através da equação 2.2 que relaciona avariação do fluxo com a variação da quantidade de massa no tempo.
ρ1.A1.v1 = ρ2.A2.v2 =dm
dt(2.2)

Capítulo 2. Conceituação 29
Desconsiderando as perdas energéticas que ocorrem no processo de geraçãode energia, podemos dizer que a potência mecânica (em Watts) extraída do fluxo de aré igual a diferença entre a potência presente no fluxo antes e depois de sua passagempelo aerogerador. Logo:
Pmec =1
2.ρ.A1.v1
3 − 1
2.ρ.A2.v2
3 =1
2.ρ.(A1.v1
3 − A2.v23) (2.3)
Substituindo a equação 2.2 na 2.3 temos que:
Pmec =(12.ρ.A1.v1
).(v1
2)−(12.ρ.A2.v2
).(v2
2) (2.4)
Pmec =1
2.m.(v1
2 − v22) (2.5)
A partir da equação 2.5 podemos concluir que, em teoria, a potência mecânicaatingiria seu valor máximo caso a velocidade v2 fosse igual a zero. Contudo, isso nãoé possível fisicamente, pois é o mesmo que dizer que a velocidade do fluxo de arapós a passagem pelo aerogerador seria zero, o que não permitiria existir velocidadedurante a passagem ou antes da passagem consequentemente. Existe na práticauma relação entre as velocidades V1 e V2 quando a potência mecânica é máxima.Podemos encontrar tal relação partindo do princípio da lei de conservação do momentolinear, sendo que a força (em Newtons) que o ar exerce sobre o aerogerador pode serexpressa por:
F = m.(v12 − v22) (2.6)
Pela terceira lei de Newton, sabemos que a força imposta pelo vento ao aeroge-rador tem uma força de igual magnitude em sentido oposto. Esse empuxo age sobre amassa do fluxo de ar que passa pelo aerogerador, empurrando-a com uma velocidadeV. Essa é a velocidade do ar no instante em que passa pelas pás da turbina. Logo, apotência (Watts) envolvida pode ser expressa por:
P = F.V = m.(v12 − v22).V (2.7)

Capítulo 2. Conceituação 30
Igualando as equações 2.5 e 2.7 partindo da ideia que as potências são iguaispara ambos os casos, temos que:
1
2.m.(v1
2 − v22) = m.(v12 − v22).V (2.8)
A partir da equação 2.8 temos que o valor da velocidade do fluxo de ar ao passarpelo aerogerador é a média aritmética de v1 e v2:
V =v1 + v2
2(2.9)
Logo, o fluxo de massa (kg/s) passa a ser:
m = ρ.A.V =1
2.ρ.A.(v1 + v2) (2.10)
Substituindo a nova expressão do fluxo de massa na equação 2.5, temos que aexpressão da potência mecânica do aerogerador é:
Pmec =1
2.[ρ.A.
(v1 + v2)
2].(v1
2 − v22) (2.11)
Rearranjando os termos:
Pmec =1
2.ρ.A.v1
3.(1 + v2
v1).[1− (v2
v1)2]
2(2.12)
Sendo que:
Cp =(1 + v2
v1).[1− (v2
v1)2]
2(2.13)

Capítulo 2. Conceituação 31
Cp é conhecido como coeficiente de potência, sendo a relação entre a potênciadisponível no vento e a potência que de fato é convertida em potência mecânica. OCp, como podemos observar através da equação 2.12, é dependente da velocidade dovento na entrada e na saída do aerogerador. Segundo (ACKERMANN, 2005), Cp temseu valor máximo quando a razão de velocidades é v2/v1=1/3. Logo, substituindo o valorde 1/3 na equação 2.12 temos que o Cp máximo é igual a 0,593. Isso significa que amáxima eficiência energética de um aerogerador é 59,3% da energia total disponível.Esse valor foi demonstrado pela primeira vez na história pelo físico alemão AlbertBetz em 1962 e passou a ser conhecido como limite de Betz (Sathyajith Mathew).Contudo, na prática, o rendimento de um aerogerador acaba sendo inferior aos 59,3%estabelecido por Betz, devido a perdas aerodinâmicas que acontecem durante oprocesso de conversão de energia cinética dos ventos em mecânica.
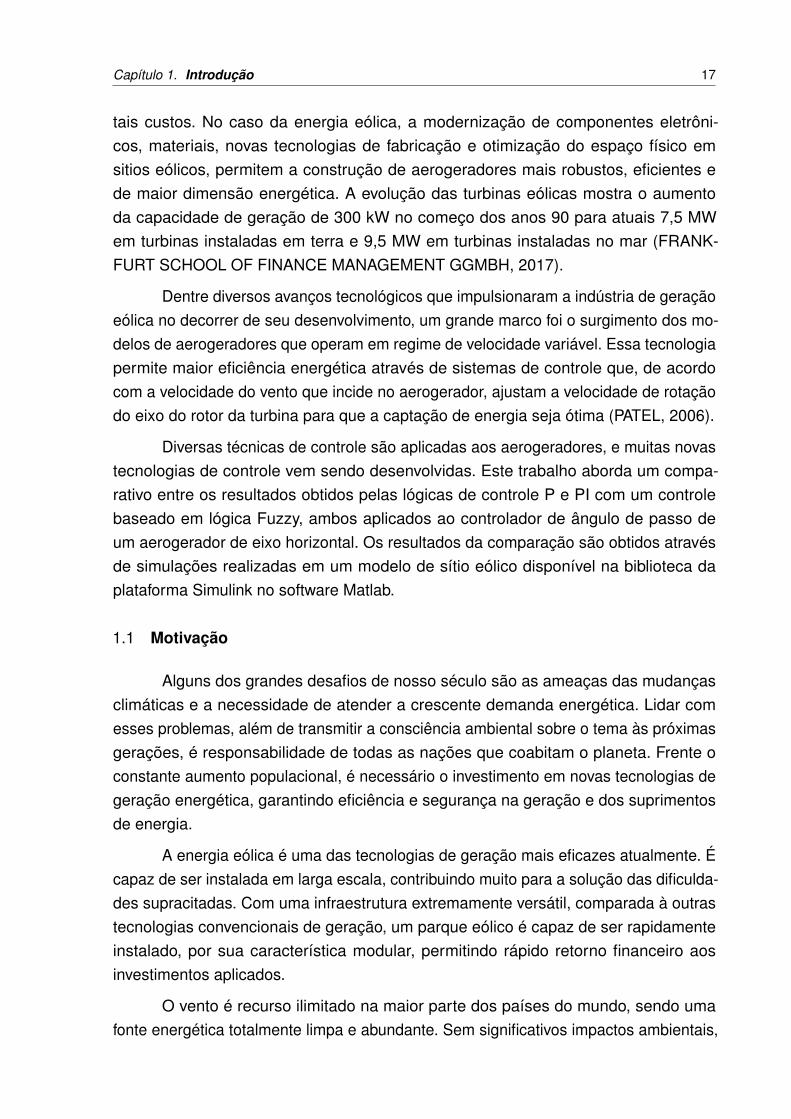
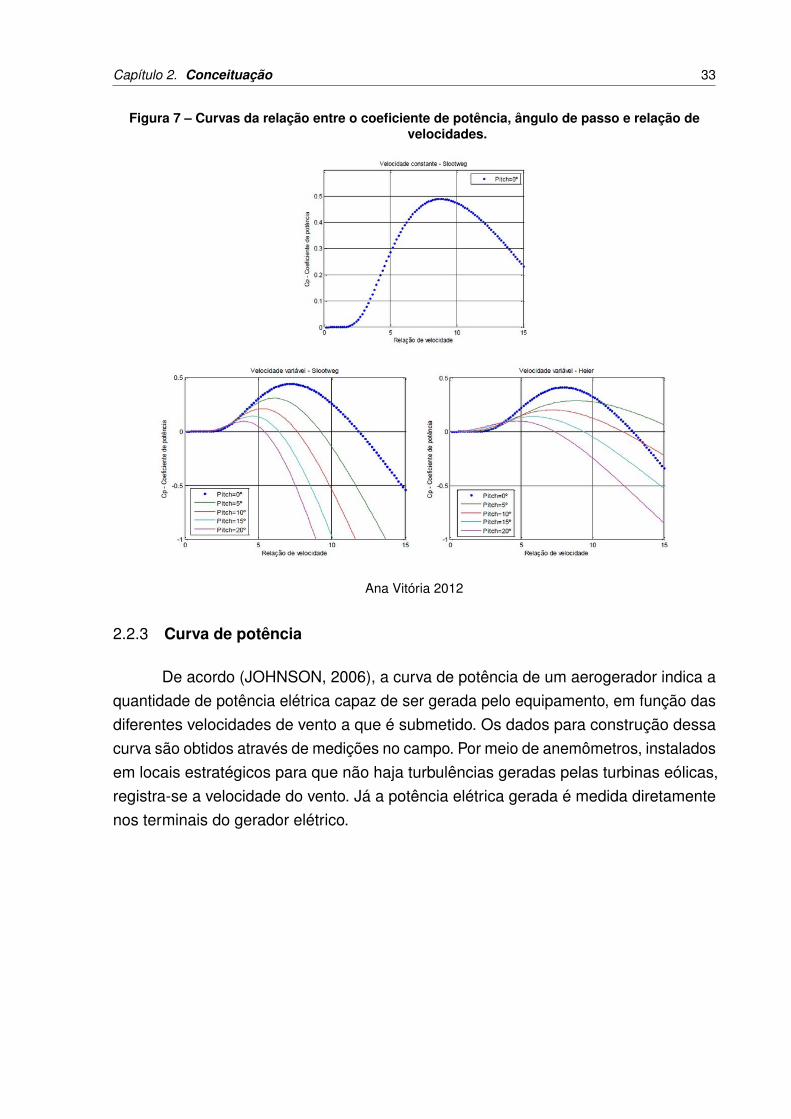
Segundo (AKHMATOV, 2003), dentro de seus limites mínimo e máximo, o coefici-ente de potência varia de acordo com os parâmetros λ e β. Esses são respectivamentea relação entre a velocidade de rotação das pás e a velocidade do vento (equação2.15) e o ângulo de passo das pás, que serão explicados nos próximos capítulos. Dessaforma, o coeficiente de potência pode ser expresso por uma função não polinomialtal qual apresentado na equação 2.14. Essa é uma equação aplicada aos diversostipos de turbinas eólicas. Os parâmetros c1, c2, c3, c4, c5, c6,c7, c8 e c9 por sua vez,expressam características aerodinâmica das turbinas e geralmente são obtidos empiri-camente. Na tabela 2, são apresentados alguns parâmetros definidos por diferentesautores.
Cp(λ, β) = c1.(c2λi− c3.β − c4.βc5 − c6).e
−c7λi (2.14)
Sendo que:
λi = (1
λ+ c8.β− c9β3 + 1
)−1
(2.15)
A relação entre a velocidade de rotação e a velocidade do vento é expressapor:
λ =ωt.R
v1(2.16)

Capítulo 2. Conceituação 32
Sendo que ωt é a velocidade angular da turbina (rad/s) medida com relação aponta das pás, R é o raio do rotor eólico medido do centro do cubo até a ponta da pá(m) e v1 é a velocidade do vento não perturbado (m/s).
Tabela 2 – Parâmetros da equação do coeficiênte de potência
Autor C1 C2 C3 C4 C5 C6 C7 C8 C9
Heier 0,5 116 0,4 0 0 5 21 0,08 0,035
Velocidade Constante
(Slootweg) 0,44 125 0 0 0 6,94 16,5 0 -0,002
Velocidade Variável
(Slootweg) 0,79 151 0,58 0,002 2,14 13,2 18,4 0,02 -0,003
Ackermann, 2005
A figura 7 mostra as curvas criadas a partir da equação 2.13 utilizando oscoeficientes dispostos na tabela 1. Essas curvas retratam o comportamento de Cp emfunção de λ para diferentes ângulos β. Podemos observar que o valor máximo de Cppara os casos apresentados variam entre 0,45 e 0,48 aproximadamente, sendo o maiorvalor de Cp obtido a partir dos dados do aerogerador de velocidade fixa apresentadospelo autor Slootweg (MACÊDO, 2012).
Capítulo 2. Conceituação 33
Figura 7 – Curvas da relação entre o coeficiente de potência, ângulo de passo e relação develocidades.
Ana Vitória 2012
2.2.3 Curva de potência
De acordo (JOHNSON, 2006), a curva de potência de um aerogerador indica aquantidade de potência elétrica capaz de ser gerada pelo equipamento, em função dasdiferentes velocidades de vento a que é submetido. Os dados para construção dessacurva são obtidos através de medições no campo. Por meio de anemômetros, instaladosem locais estratégicos para que não haja turbulências geradas pelas turbinas eólicas,registra-se a velocidade do vento. Já a potência elétrica gerada é medida diretamentenos terminais do gerador elétrico.

Capítulo 2. Conceituação 34
Figura 8 – Curva de potência genérica de um aerogerador de eixo horizontal
Trevor Dobbin 2014
A figura 8 exemplifica uma curva de potência genérica de um aerogerador deeixo horizontal de três pás e que utiliza um gerador de indução duplamente alimentado.Nessa curva estão indicados quatro regiões de operação, contudo, os aerogeradores,em condições normais, operam somente nas regiões II e III. As características de cadaregião são descritas a seguir (DOBBIN, 2014):
Região I e IV - Nessas regiões o sistema encontra-se desligado, ou seja, osistema de freio das turbinas está acionado travando o eixo do rotor, e o aerogerador édesconectado da rede de transmissão. No caso da região I, a velocidade de vento émuito baixa. Dessa forma, as perdas energéticas do sistema e os custos de operação doequipamento não são viáveis economicamente frente a pouca quantidade de potênciaelétrica que seria gerada. Já na região IV, a parada da máquina ocorre por questões desegurança. O aerogerador já se encontra em regime de operação gerando a potêncianominal do equipamento, contudo, a velocidade do vento sobe para valores muito acimados limites nominais (vmx) sob os quais a turbina eólica foi projetada. Isso poderiadanificar os equipamentos gerando grande prejuízo e riscos de acidente. Então, oângulo das pás é alterado de forma a reduzir a captação de energia e os freios sãoacionados, parando a máquina(AMÊNDOLA, 2007) .
Região II - Nessa região a velocidade do vento encontra-se dentro do intervaloentre o valor mínimo (vmin) de corte e o valor nominal (vnom). Dentro dessa faixa develocidades do vento, os controladores do gerador atuam objetivando o maior valor deCp possível. Já o sistema de controle do ângulo de passo fica praticamente inativo,sustentando o ângulo em valores definidos como de melhor aproveitamento de potência.Diversos trabalhos mostram que o angulo zero é o que dá origem ao maior angulocoeficiente de potência . Contudo, dependendo da lógica adotada, o controle do ângulo

Capítulo 2. Conceituação 35
de passo pode ser acionado nessa região caso haja alguma instabilidade no sistema,pois uma das funções deste controle é contribuir para a estabilidade transitória oriundade falhas ou curto-circuitos na rede (FADIGAS, 2011).
Região III - Nessa região a velocidade do vento excede a velocidade nominaldentro de valores aceitáveis para o projeto. Cabe ao controle do angulo de passo limitara extração da potência ativa do gerador a partir da limitação da captação da energia dovento. Também é função do controle do angulo de passo iniciar a parada da turbinaquando os sensores de velocidade indicam uma medição acima da velocidade de cortevmx (U.S. DEPARTMENT OF ENERGY, 2008, ) .
2.2.4 Trajetória de máxima potência
(DOBBIN, 2014) afirma em sua tese que um controlador de ângulo de passotem por objetivo manter o ângulo das pás em seu valor ótimo βopt, maximizando assim ocoeficiente de potência Cp. Partindo desse princípio, ao considerarmos um aerogeradoroperando com o valor de βopt para o ângulo de passo das pás, e considerando aindaum valor constante Vx para a velocidade do vento, teremos que as expressões docoeficiente de potência e a relação de velocidades serão dados por:
λ = ωt.R
vx= ωt.kx (2.17)
Cp(λ, βopt) = Cpx(ωt) (2.18)
Pmecx =1
2.ρ.A.Cpx(ωt).v
3x = k′x.Cpx(ωt) (2.19)
Logo, a relação entre a velocidade angular do aerogerador e a potência mecânicada turbina podem ser retratadas em uma curva muito semelhante as curvas Cp x λapresentadas na figura 7. Essa curva mostra que há um único valor para a velocidadeangular capaz de gerar o valor máximo de potência. Esse valor de velocidade angularcorresponde a relação de velocidades ótima (λopt). Dessa forma:
λoptx = kx.ωtoptx (2.20)
Capítulo 2. Conceituação 36
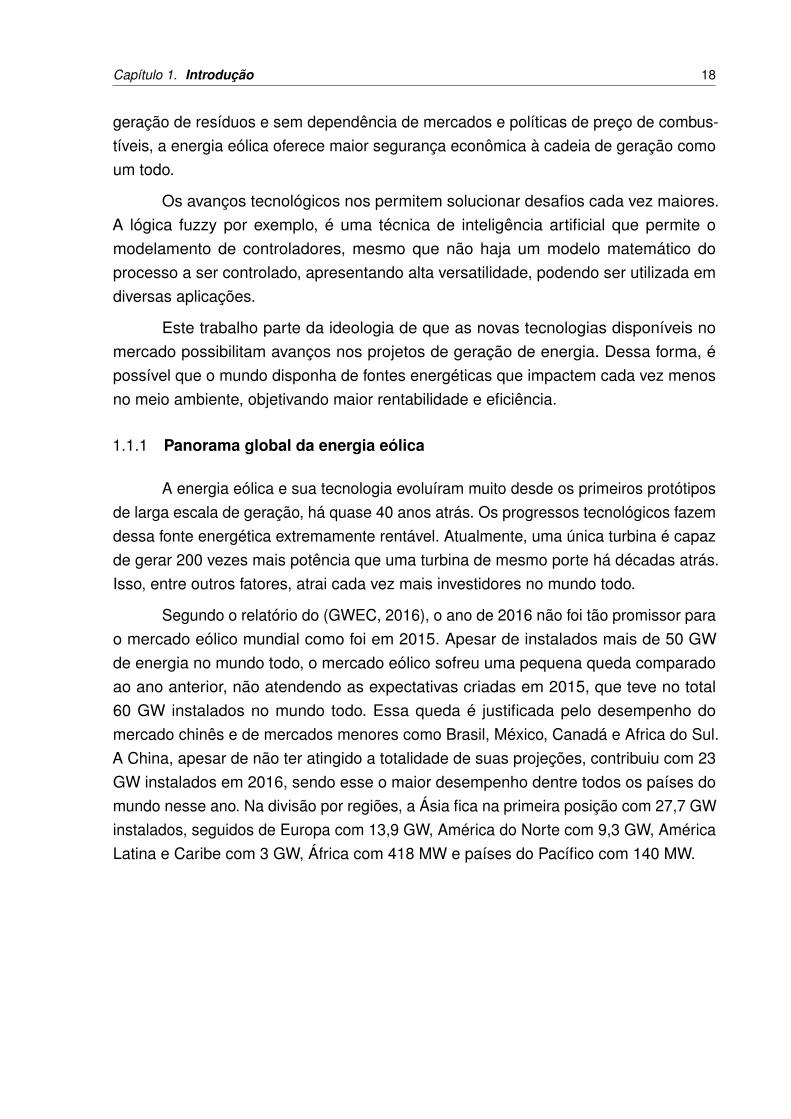
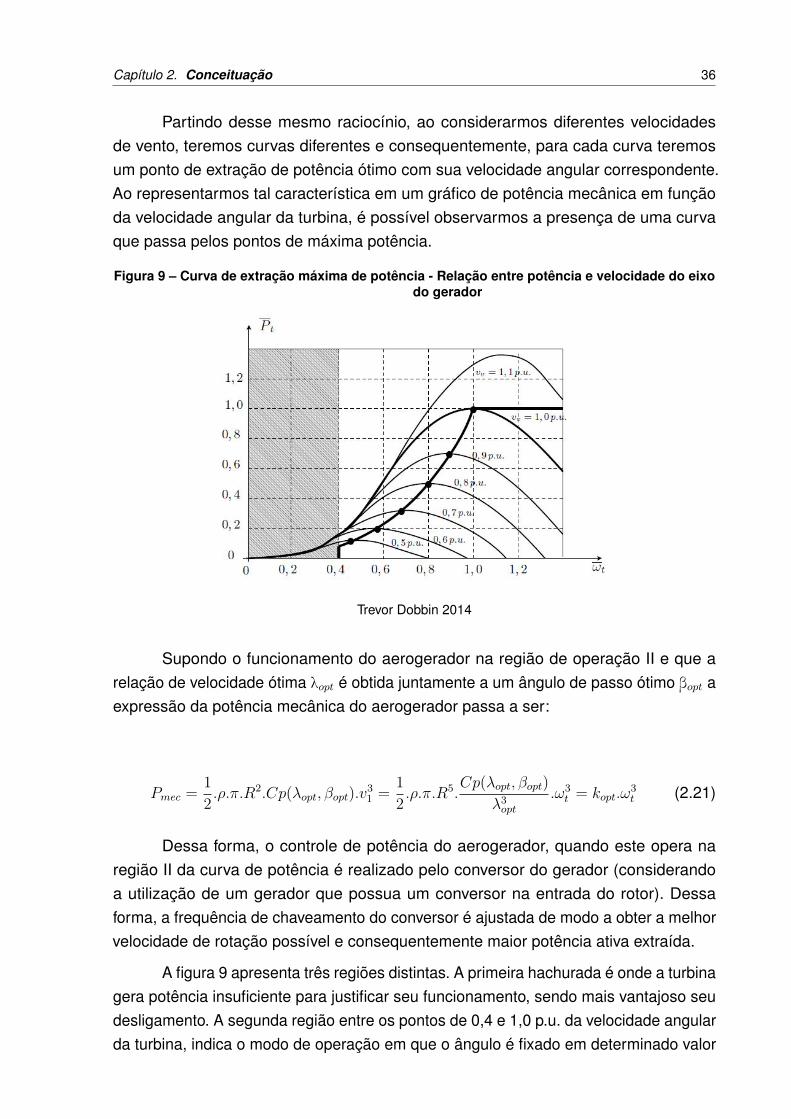
Partindo desse mesmo raciocínio, ao considerarmos diferentes velocidadesde vento, teremos curvas diferentes e consequentemente, para cada curva teremosum ponto de extração de potência ótimo com sua velocidade angular correspondente.Ao representarmos tal característica em um gráfico de potência mecânica em funçãoda velocidade angular da turbina, é possível observarmos a presença de uma curvaque passa pelos pontos de máxima potência.
Figura 9 – Curva de extração máxima de potência - Relação entre potência e velocidade do eixodo gerador
Trevor Dobbin 2014
Supondo o funcionamento do aerogerador na região de operação II e que arelação de velocidade ótima λopt é obtida juntamente a um ângulo de passo ótimo βopt aexpressão da potência mecânica do aerogerador passa a ser:
Pmec =1
2.ρ.π.R2.Cp(λopt, βopt).v
31 =
1
2.ρ.π.R5.
Cp(λopt, βopt)
λ3opt.ω3t = kopt.ω
3t (2.21)
Dessa forma, o controle de potência do aerogerador, quando este opera naregião II da curva de potência é realizado pelo conversor do gerador (considerandoa utilização de um gerador que possua um conversor na entrada do rotor). Dessaforma, a frequência de chaveamento do conversor é ajustada de modo a obter a melhorvelocidade de rotação possível e consequentemente maior potência ativa extraída.
A figura 9 apresenta três regiões distintas. A primeira hachurada é onde a turbinagera potência insuficiente para justificar seu funcionamento, sendo mais vantajoso seudesligamento. A segunda região entre os pontos de 0,4 e 1,0 p.u. da velocidade angularda turbina, indica o modo de operação em que o ângulo é fixado em determinado valor

Capítulo 2. Conceituação 37
para maximizar a eficiência aerodinâmica, sendo o controle de velocidade realizado peloconversor que aciona o gerador. A terceira região faz referência a operação da turbinaacima da velocidade nominal, sendo o controle do angulo de passo o responsável pormanter a extração da potência em seus valores nominais.
2.2.5 Controle de potência
Como dito anteriormente, com a incidência de ventos fortes, cuja velocidadetransmita o torque máximo ao eixo do gerador, o conversor responsável pelo controleda velocidade passa a não ser mais capaz de controlar a velocidade. Podemos dizerentão que o gerador encontra-se saturado.
Na curva apresentada na figura 9, é possível observarmos o comportamentodo aerogerador frente a diferentes entradas de vento. Como anteriormente citado, naregião II o controle de velocidade é realizado pelos conversores de potência acopladosa alimentação do rotor. Quando a potência atinge sua tensão nominal, entrando naregião III de operação, é o ângulo das pás que será incrementado para limitação dapotência aerodinâmica, já que essa grandeza é proporcional a relação de velocidadedo vento (λ) e ângulo de passo (β).
Segundo (DOBBIN, 2014), o sistema de controle do ângulo de passo de aero-geradores é a estratégia de controle mais eficiente para limitar a potência mecânicacaptada, quando o equipamento é submetido a altas velocidades de vento. Contudo,existem técnicas de limitação de potência aerodinâmica mais simples, como é o casodo controle por estol e controle por estol passivo.
2.2.5.1 Controle por estol passivo
Na estratégia de controle por estol passivo, as pás do aerogerador são fixadasem um ângulo de passo pré determinado. Quando a velocidade do vento atinge níveisem que velocidade de rotação do aerogerador alcance seu valor nominal, surgemturbulências no escoamento do ar na face oposta a face de incidência do vento. Esseefeito faz com que a força de sustentação que atua na pá do aerogerador diminua ea força de arrasto aumente, reduzindo a potência aerodinâmica da turbina eólica(MACÊDO, 2012) .
O controle de potência por estol passivo geralmente é aplicado a aerogeradoresde pouca complexidade de construção, o que exige menos manutenção do sistemacomo um todo. Contudo, para que essa estratégia seja possível, é necessário que operfil da pá seja projetado especificamente para considerar os efeitos aerodinâmicosda frenagem por estol. Dessa forma, efeitos indesejados na dinâmica de geraçãocomo ineficiência de rendimento e falhas estruturais são evitados (SENA, 2015) .
Capítulo 2. Conceituação 38
Apesar de ser uma técnica de controle de potência de menor custo comparadaas demais, este método possui alto índice de fadiga mecânica dos elementos dosistema em decorrência de turbulências e rajadas de vento de força excessiva. Outrasdesvantagens são a impossibilidade de realização de partida e parada assistida doequipamento e variações da potência máxima de saída em decorrência a alteraçõesna densidade do ar.
2.2.5.2 Controle por estol ativo
Turbinas que utilizam esse tipo de controle são capazes de variar o ângulode passo das pás ao redor de seu eixo longitudinal. O objetivo deste controle écausar um efeito estol quando a velocidade atinge o limite nominal das característicasaerodinâmicas da turbina eólica.
O funcionamento do controle ocorre da seguinte maneira: sob baixas velocidadesde vento, o ângulo das pás é mantido em seu valor ótimo de captação de energiamecânica. A partir do momento em que a velocidade do vento atinge seu valor nominal,ângulo de passo é reduzido, de modo que o efeito estol surja na face oposta a deincidência do vento (como ocorre no controle por estol fixo). Este controle permitecompensar as variações de potência causadas pela variação de densidade do ar ediminuição das cargas mecânicas impostas ao sistema (JOHNSON, 2006) .
2.2.5.3 Controle ativo do ângulo de passo
Segundo (AMÊNDOLA, 2007), o objetivo do controle ativo do ângulo de passo éotimizar a potência gerada pelos aerogeradores em diferentes velocidades de vento,além de limitar a potência mecânica absorvida, protegendo o equipamento contrasobrecargas. Logo, quando a potência ativa de saída da turbina passa do valor nominal,atuadores aumentam o ângulo de passo das pás reduzindo o ângulo de ataque, demodo a diminuir a energia captada e consequentemente a velocidade de rotação. Essesatuadores geralmente são válvulas hidráulicas ou motores de passo elétricos. Estessão acoplados através de engrenagens à cremalheiras dispostas ao redor do eixo decada uma das pás, .
Diferentemente do controle por estol ativo, esse controle não gera o efeito deturbulência no escoamento do vento no perfil da pá. O que permite um melhor ajuste dapotência de saída do gerador, com melhoria no controle de extração de energia. Issopossibilita operar em faixas mais extensas de velocidades e potências.
Segundo (ACKERMANN, 2005), outra vantagem é a possibilidade de ser re-alizada a partida assistida do equipamento, analisando os pontos de operação doaerogerador e suas características. O controle ativo do ângulo de passo também per-

Capítulo 2. Conceituação 39
mite o auxílio da parada de emergência do equipamento quando necessário. Paraisso um ângulo β de 90º é aplicado, fazendo com que haja uma grande redução develocidade, auxiliando o trabalho dos freios dispostos no eixo da turbina. As desvan-tagens dessa estratégia de controle são o aumento do custo do aerogerador dada acomplexidade do sistema, e flutuações na potência de saída em regimes de ventosfortes. Isso porque, a potência instantânea irá variar em torno da potência nominal.
Atualmente na industria eólica, controlador de ângulo de passo mais utilizado éo proporcional-integral (PI). Contudo, de acordo com (DOBBIN, 2014), existem diversosmodelos e estratégias de controle deste parâmetro. Sendo um controle crucial nageração eólica, e o principal responsável pela limitação da potência gerada pelaturbina.
Em projetos reais, os parâmetros envolvidos no modelamento do controlador doângulo de passo dependem de diversos fatores, como a dinâmica da torre por exemplo.Sua vibração influencia muito os algorítimos a serem implementados para controlar oângulo das pás. Contudo, para efeitos de simplificação, muitos modelos consideramcomo parâmetros de entrada do sistema de controle a velocidade angular do eixo dorotor e a potência ativa gerada (DOBBIN, 2014).
A figura abaixo apresenta um diagrama representando um controlador convenci-onal PI para o ângulo de passo de um aerogerador.
Figura 10 – Diagrama de controle PI do ângulo de passo utilizando lógica
Trevor Dobbin, 2014
Sendo que:
u = Kp +Ki.1
s(2.22)
Com parâmetros:

Capítulo 2. Conceituação 40
Kp =2Jωt0ξωn
Ng
(− δPt(β)
δβ
) (2.23)
Ki =Jωt0ξω
2n
Ng
(− δPt(β)
δβ
) (2.24)
Sendo J a inércia do rotor, ωt0 é a velocidade da turbina na qual o modelo foilinearizado, ξ é o coeficiente de amortecimento, ωn é a banda passante, Ng é a relaçãode engrenagens da transmissão e β o ângulo de passo.
2.3 Lógica Fuzzy
A lógica fuzzy, ou lógica difusa, é baseada na teoria de conjuntos desenvolvidaem 1965 por Lotfi Zadeh, professor da Universidade da Califórnia, quando trabalhavaem problemas envolvendo a classificação de conjuntos, que não possuíam fronteirasbem definidas. Tal lógica possibilita a obtenção de valores definidos de saída, a partir deinformações, mesmo que imprecisas, dispostas na entrada. Diferentemente da lógicaclássica booleana, através da lógica fuzzy, é possível que conhecimentos qualitativos,acerca de determinado fenômeno ou processo, sirvam de subsídio para a solução deum problema (REIS, 2002).
Na solução de um problema através da lógica booleana, por exemplo, determi-nada informação é considerada completamente verdadeira ou completamente falsa.Já na lógica fuzzy, consideram-se valores intermediários entre os extremos de verda-deiro e falso para determinada informação, na obtenção da resposta de determinadoproblema. O exemplo clássico do copo de água “meio cheio” ou “meio vazio”, quedivide a humanidade entre otimistas e pessimistas, permite ter idéia de como a lógicafunciona, pois o nível de água estando em determinado ponto do copo, remete a umainterpretação qualitativa de um observador, que talvez possa afirmar que o copo está“meio cheio”, ao considerar que a água esteja para cima da metade do copo, chega aessa conclusão(REIS, 2002) .
A partir dos anos 80, houve um crescimento na utilização da logica fuzzy nasmais diversas aplicações. Atualmente, lavadoras de prato, aspiradores de pó, sistemasde monitoramento, sistemas de refrigeração de prédios, etc, utilizam controladoresque funcionam a partir da lógica fuzzy. O aumento da popularidade dessa técnicapode ser atribuído ao fato de não haver necesidade do conhecimento detalhado domodelo matemático do sistema a ser controlado, possibilitando o controle de sistemasextremamente complexos e de caráter não linear (MACÊDO, 2012).
Capítulo 2. Conceituação 41
A versatilidade que a lógica fuzzy proporciona é outro ponto de grande vantagem.Ela não possui aplicação específica, como a proporcionada por uma lógica probabilísticaou booleana. Ao contrário, pode ser utilizada nas mais variadas situações, mesmoque imprecisas, dado que até mesmo informações baseadas em expressões adverbiaiscomo “quente, frio, longe, perto”, podem dar subisídios à estuturação de uma resposta.Problemas com sensores enviando um sinal que varia muito, por exemplo, poderiamser solucionados com a aplicação da lógica fuzzy, desde que a informação transmitidapossa ser relacionada a algum comportamento previsto no processo (BOTURA et al.,1999).
O processo de aplicação da lógica fuzzy, para solução de algum problema oudesenvolvimento de um controlador, por exemplo, pode ser dividido nas seguintesetapas:
• Fuzzificação
• Inferência
• Defuzificação
Contudo, antes da explicação de cada uma das etapas, as sessões seguintesapresentam alguns conceitos básicos para melhor entendimento da lógica como umtodo.
2.3.1 Conjuntos fuzzy e funções de pertinência
Segundo (COX, 1994), a ideia básica da lógica fuzzy é relacionar determinadodado ou informação com algum comportamento, estado ou consequência. Por exemplo,se alguma pessoa tenta medir a febre de alguém lhe tocando a testa, não conseguirádeterminar exatamente a temperatura em graus Celsius, contudo, devido à sua experi-ência de vida, pode afirmar quando uma pessoa está com a temperatura alterada. Aotratarmos tal situação com lógica fuzzy, é possível dizermos que a sensação da pessoaque mediu a febre, associada a sua interpretação, pode classificar a febre do indivíduoentre baixa, média e alta. Logo, a pessoa que está “medindo” a temperatura, julga quea sua sensação pertence mais ou menos a algum desses grupos.
A teoria de conjuntos clássica trata a pertinência de um determinado elementoem um grupo, como sendo totalmente verdade, ou totalmente falso. Logo, dentro deum universo de discurso U, ao avaliar se uma variável x pertence a um determinadosubconjunto A, é possível expressar que:

Capítulo 2. Conceituação 42
µA(x) =
1 se x ∈ A
0 se x /∈ A(2.25)
Sendo que μAé a função de grau de pertinência de x em A, nesse caso limitadaaos valores de 0 e 1.
Já na lógica fuzzy temos que a variável x pode pertencer parcialmente aosubconjunto A. Logo, a variável x pertencerá ao subconjunto A com um grau depertinência classificado entre 0 e 1. Assim, A será classificado como subconjunto fuzzyde U ao ser possível descrevê-lo como um conjunto de pares ordenados da seguinteforma:
A ={(x, µA(x)), x ∈ U
}(2.26)
A função de pertinência pode ser representada através de diversos tipos decurva como trapezoidal, triangular, quadrática, gaussiana, singleton, etc. Segundo(FERNANDES, 2005) as funções trapezoidal e triangular são as mais utilizadas parasolucionar problemas em que os parâmetros da função de pertinência são definidospelo operador. Através desses tipos de funções, se torna intuitivo mapear limites como“total”, “médio” e “nulo”, facilitando o trabalho de fuzzificação.
Na figura 11 e 17 temos um exemplo do mapeamento das funções de pertinênciadas variáveis de entrada e saída, respectivamente, de um sistema que refrigera umasala, ambas utilizando funções de pertinência triangulares. A figura 11 mostra tempe-ratura da sala. No eixo Y do gráfico está disposto grau de pertinência e no eixo X, atemperatura propriamente dita. Já a figura 17 mostra a velocidade do ventilador, sendoessa a saída do sistema. Pode-se observar que cada um dos grupos representadospelas funções triangulares é representado por uma variável linguística, composta porum conjunto fuzzy de valores que o caracteriza. No caso, são variáveis linguísticas deentrada FRIO, MORNO e QUENTE, e de saída LENTO, MÉDIO e RÁPIDO.
Figura 11 – Funções de pertinência para variáveis de entrada
Cesar Botura 1999

Capítulo 2. Conceituação 43
Figura 12 – Funções de pertinência para variáveis de saída
Cesar Botura 1999
Em suma, o conjunto fuzzy é representado por uma função de pertinência, e ograu de pertinência que a função fornece, demonstra o quanto determinada variável éparte desse conjunto fuzzy. Segundo (MACÊDO, 2012), para a obtenção das funçõesde pertinência podem-se usar os seguintes métodos:
• Intuição
• Inferência
• Redes neurais
• Algorítimos genéticos
• Raciocínio indutivo
Neste trabalho, foram utilizadas a intuição e inferência para obter as funções depertinência, pois a análise do problema foi feita a partir de observações do comporta-mento do modelo utilizado, a partir dos resultados de sequentes simulações. Determi-nando assim, as melhores configurações para obtenção de melhores resultados decontrole do ângulo de passo.
2.3.2 Operações entre conjuntos fuzzy
Na teoria de conjuntos clássica, um determinado conjunto pode ser representadopor um vetor que contenha todos os valores que o compõem. Na teoria de conjuntosfuzzy, a representação de um conjunto acontece da mesma maneira, contudo, o vetor devalores será composto pelos graus de pertinência resultantes da função de pertinência,e esses podem assumir infinitos valores dentro do intervalo numérico [0, 1]. Logo,tal qual na teoria de conjuntos clássica, podemos realizar operações envolvendo oconteúdo de tais vetores. Entre conjuntos fuzzy as principais operações realizadas sãounião e intersecção (SENA, 2015).
Capítulo 2. Conceituação 44
• União de conjuntos fuzzy
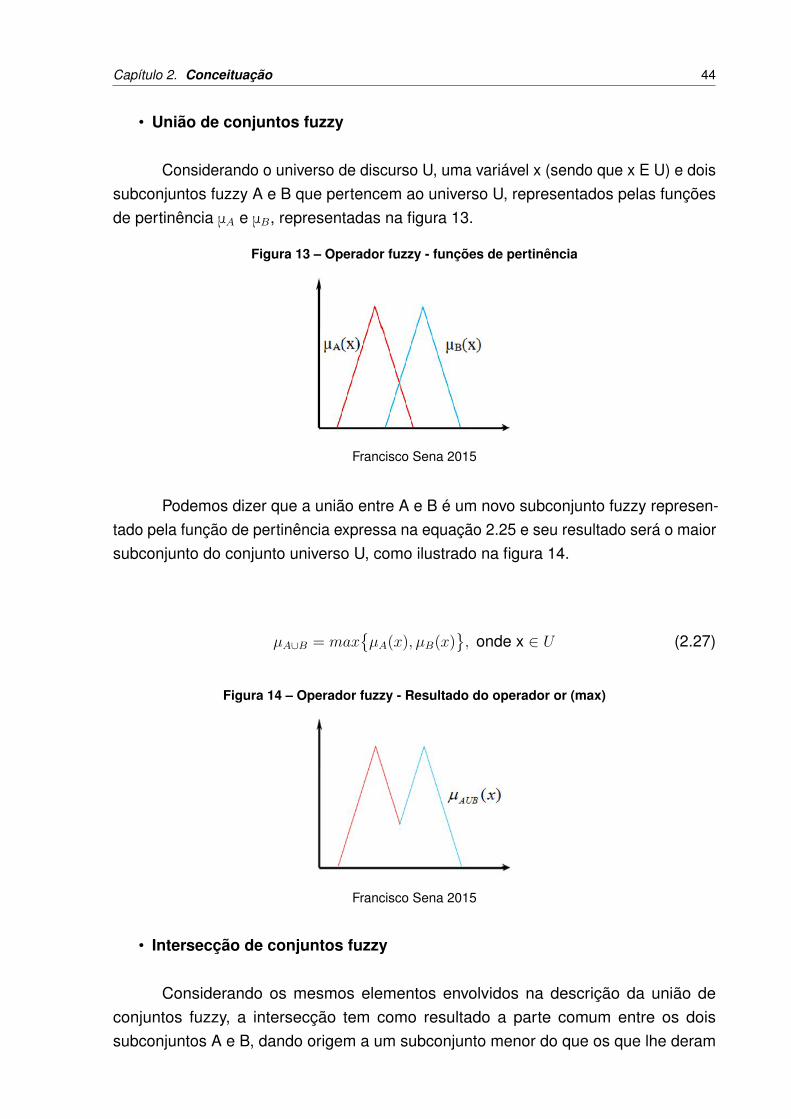
Considerando o universo de discurso U, uma variável x (sendo que x E U) e doissubconjuntos fuzzy A e B que pertencem ao universo U, representados pelas funçõesde pertinência μA e μB, representadas na figura 13.
Figura 13 – Operador fuzzy - funções de pertinência
Francisco Sena 2015
Podemos dizer que a união entre A e B é um novo subconjunto fuzzy represen-tado pela função de pertinência expressa na equação 2.25 e seu resultado será o maiorsubconjunto do conjunto universo U, como ilustrado na figura 14.
µA∪B = max{µA(x), µB(x)
}, onde x ∈ U (2.27)
Figura 14 – Operador fuzzy - Resultado do operador or (max)
Francisco Sena 2015
• Intersecção de conjuntos fuzzy
Considerando os mesmos elementos envolvidos na descrição da união deconjuntos fuzzy, a intersecção tem como resultado a parte comum entre os doissubconjuntos A e B, dando origem a um subconjunto menor do que os que lhe deram

Capítulo 2. Conceituação 45
origem. Dessa forma, podemos expressar que a função de pertinência (figura 15) podeser expressa por:
µA∩B = min{µA(x), µB(x)
}, onde x ∈ U (2.28)
Figura 15 – Operador fuzzy - Resultado do operador and (min)
Francisco Sena 2015
2.3.3 Sistemas de controle fuzzy
Segundo (REIS, 2002), um controlador tem por objetivo regular determinadoprocesso através da alteração de uma ou mais entradas que fornecem dados parao sistema. Isso é feito a partir de regras que definem o funcionamento do processo.Logo, os controladores clássicos utilizam modelos matemáticos para ajustar um estadomedido (por meio de sensores) objetivando um estado de referência.
No controle fuzzy, quem faz a função do modelo matemático é o conjunto deregras que descreverão o funcionamento do sistema. Logo, a partir das entradas apre-sentadas, as regras definirão uma saída específica. Sendo que, essas regras podemser estabelecidas a partir do simples conhecimento intuitivo do sistema, dispensandoa necessidade de elaborados cálculos matemáticos para descrever o modelo comprecisão. Contudo, os controladores fuzzy podem ser aplicados juntamente com contro-ladores convencionais, formando um sistema de controle híbrido. O que ressalta aindamais sua versatilidade(REIS, 2002) .
A figura 16 exemplifica como o processo de estruturação da lógica fuzzy funciona.Serão descritas a seguir cada uma das etapas do processo.
Na inferência, as regras fuzzy são relacionadas com os graus de pertinênciados dados de entrada, gerando sinais de saída. Já na última etapa, a defuzificação, osvalores obtidos na saída são convertidos para a variável linguística pré definida.
Capítulo 2. Conceituação 46
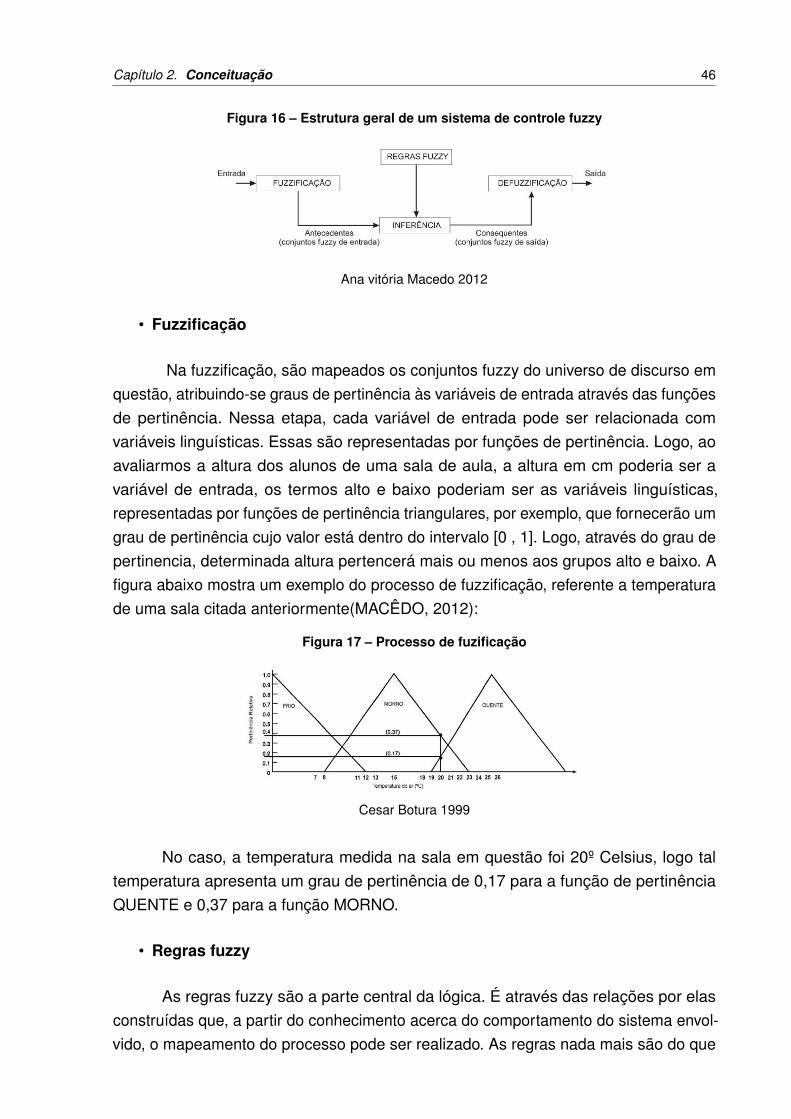
Figura 16 – Estrutura geral de um sistema de controle fuzzy
Ana vitória Macedo 2012
• Fuzzificação
Na fuzzificação, são mapeados os conjuntos fuzzy do universo de discurso emquestão, atribuindo-se graus de pertinência às variáveis de entrada através das funçõesde pertinência. Nessa etapa, cada variável de entrada pode ser relacionada comvariáveis linguísticas. Essas são representadas por funções de pertinência. Logo, aoavaliarmos a altura dos alunos de uma sala de aula, a altura em cm poderia ser avariável de entrada, os termos alto e baixo poderiam ser as variáveis linguísticas,representadas por funções de pertinência triangulares, por exemplo, que fornecerão umgrau de pertinência cujo valor está dentro do intervalo [0 , 1]. Logo, através do grau depertinencia, determinada altura pertencerá mais ou menos aos grupos alto e baixo. Afigura abaixo mostra um exemplo do processo de fuzzificação, referente a temperaturade uma sala citada anteriormente(MACÊDO, 2012):
Figura 17 – Processo de fuzificação
Cesar Botura 1999
No caso, a temperatura medida na sala em questão foi 20º Celsius, logo taltemperatura apresenta um grau de pertinência de 0,17 para a função de pertinênciaQUENTE e 0,37 para a função MORNO.
• Regras fuzzy
As regras fuzzy são a parte central da lógica. É através das relações por elasconstruídas que, a partir do conhecimento acerca do comportamento do sistema envol-vido, o mapeamento do processo pode ser realizado. As regras nada mais são do que

Capítulo 2. Conceituação 47
uma lógica condicional, que funciona a partir dos operadores SE (parte antecedente)e ENTÃO (parte consequente), relacionando as variáveis de entrada com as funçõesde pertinência entrada, dando origem ao sinal de saída. Segue um exemplo de aplica-ção desse tipo de regra, considerando o mesmo exemplo apresentado apresentadoanteriormente (BOTURA et al., 1999):
SE temperatura da sala é FRIO (antecedente) ENTÃO velocidade do ventiladoré LENTO (consequente)
SE temperatura da sala é MORNO (antecedente) ENTÃO velocidade do ventila-dor é MÉDIO (consequente)
SE temperatura da sala é QUENTE (antecedente) ENTÃO velocidade do ventila-dor é RÁPIDO (consequente)
Logo, nesse exemplo, considerando que na fase de fuzificação o valor de20º acionou as funções de pertinência QUENTE e MORNO, e a partir das regrasestipuladas, as saídas acionadas serão as velocidades do ventilador MÉDIO e RÁPIDO.Ou seja, a variável de entrada é convertida em um número que varia entre 0 e 1 (graude pertinência), representando o quão a informação da temperatura da sala a configuradentre os conjuntos fuzzy de entrada, sendo esse o antecedente. E as regras fuzzy porsua vez, relacionam as funções de pertinência da entrada às da saída, sendo essas asconsequentes(BOTURA et al., 1999) .
• Inferência
Após o mapeamento do problema através das regras fuzzy, é necessário mapearas entradas, de acordo com seus valores, e definir o conjunto fuzzy de saída. Esseprocesso é realizado na inferência, quando são reunidos os resultados de cada umadas regras aplicadas sobre as variáveis de entrada, relacionando-as com a saída. Noprocesso da lógica fuzzy, todas as regras são compiladas ao mesmo tempo, gerandocomo resultado da inferência um conjunto fuzzy ou um valor numérico, a dependerdo método de inferência utilizado. Existem alguns métodos de inferência, contudoos mais aplicados são os métodos Mamdani e Takagi-Sugeno(VAN; NGUYEN; LEE,2015).
O método Mamdani foi utilizado nas primeiras tentativas de aplicação da lógicafuzzy em sistemas de controle, com o objetivo de controlar máquinas a vapor. Essemétodo baseia-se no operador de intersecção e utiliza funções de pertinência fuzzytanto nos antecedentes, quanto nos consequentes das regras. A saída, como ditoanteriormente, passa a ser uma combinação de todos as áreas acionadas pelas regrasfuzzy, de acordo com o tipo de operador utilizado. A figura 18 mostra um exemplo deinferência que utiliza o agregador mínimo para compor a área resultante no processo
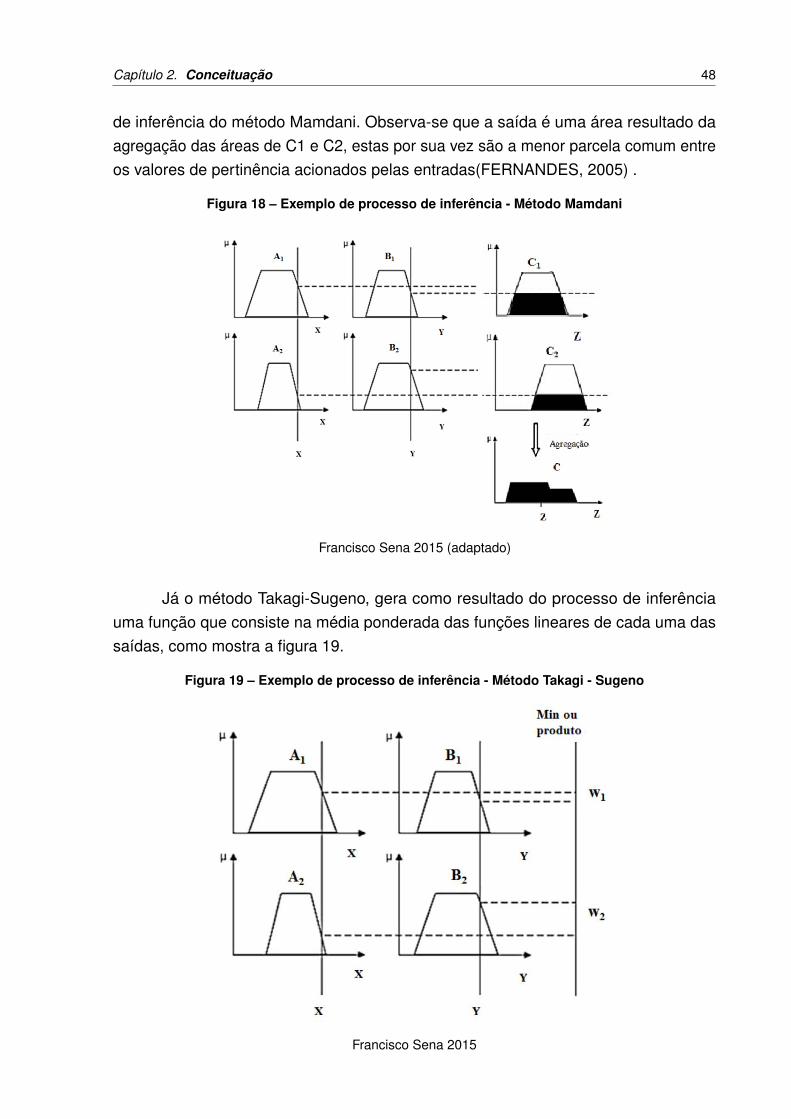
Capítulo 2. Conceituação 48
de inferência do método Mamdani. Observa-se que a saída é uma área resultado daagregação das áreas de C1 e C2, estas por sua vez são a menor parcela comum entreos valores de pertinência acionados pelas entradas(FERNANDES, 2005) .
Figura 18 – Exemplo de processo de inferência - Método Mamdani
Francisco Sena 2015 (adaptado)
Já o método Takagi-Sugeno, gera como resultado do processo de inferênciauma função que consiste na média ponderada das funções lineares de cada uma dassaídas, como mostra a figura 19.
Figura 19 – Exemplo de processo de inferência - Método Takagi - Sugeno
Francisco Sena 2015
Capítulo 2. Conceituação 49
Assim, Z1 e Z2 são as funções lineares que representam cada uma das saídasdo sistema. E o resultado da inferência é dado por:
Z =Z1.W1 + Z2.W2
W1 +W2
(2.29)
Sendo que:
Z1 = α1.x+ β1 + λ1 (2.30)
Z2 = α2.x+ β2 + λ2 (2.31)
• Defuzzificação
Na defuzzificação ocorre o processo de “tradução” do conjunto fuzzy resultantedo processo de aplicações de regras fuzzy e inferência, gerando como resultado umvalor discreto absoluto. Esse valor é o que será enviado à algum sistema ou processoa ser controlado. Assim, o controlador fuzzy precisa converter as variáveis de saída emalgo que seja passivo de leitura pelo sistema que o receberá(FERNANDES, 2005) .
Alguns dos métodos de defuzzificação são descritos abaixo.
• Método dos máximos: Esse método pode ser utilizado no modo “maior dosmáximos”, “menor dos máximos” ou “média dos máximos”. Nesse método, o má-ximo valor de pertinência é utilizado para determinar a saída. No caso do maiordos máximos, o maior valor da variável, que está associado ao maior grau depertinência, é considerado para compor o sinal de saída. No caso do menordos máximos, o menor valor da variável, que está associado ao maior grau depertinência, é utilizado para compor a saída. Já na média dos máximos, a médiaaritmética entre os valores obtidos pelo maior e menor dos máximos é que seráconsiderada na saída. Porém, esse método pode gerar múltiplas saídas, se maisde um valor de alguma variável possuir o mesmo grau de pertinência(SHAW;SIMÕES, 1999) .
• Método da centróide: Esse método considera que os valores de pertinênciade todo o conjunto fuzzy, originado da agregação na etapa de inferência, sãoconsiderados formando uma figura geométrica sólida. Sendo assim, o valor

Capítulo 2. Conceituação 50
do centro de gravidade dessa figura é tido como o valor resultante. O métododa centróide é um dos métodos de defuzzificação mais utilizado. Apesar davantagem de eliminar saídas múltiplas, devido a sua maior complexidade decálculos geométricos, é um método que demanda maior capacidade e tempo deprocessamento(SHAW; SIMÕES, 1999) .
Tomando novamente o exemplo do sistema de ventilação da etapa de fuzzifi-cação, as saídas obtidas foram RÁPIDO e MÉDIO, com graus de pertinência 0,37 e0,17 respectivamente. Sendo que, os valores da variável de saída para a velocidade derotação são mostrados na figura abaixo.
Figura 20 – Processo de defuzificação
Cesar Botura 1999
Logo, existe mais de um valor absoluto para compor a saída. Para a funçãode pertinência RÁPIDO, os valores de saída para a velocidade de rotação do ventila-dor foram 680 rpm e 1200 rpm. Para a função MÉDIO, os valores foram 375 rpm e710 rpm. As figuras abaixo demonstram os resultados de cada um dos métodos dedefuzificação apresentados. O método dos máximos encontrou os valores de 375 rpm,710 rpm e 542,5 rpm através dos modos menor dos máximos, maior dos máximos emédia dos máximos respectivamente. Já o método centróide encontrou o valor de 635rpm(BOTURA et al., 1999) .
Figura 21 – Resultado defuzificação - Método dos máximos
Cesar Botura 1999

Capítulo 2. Conceituação 51
Figura 22 – Resultado defuzificação - Método centróide
Cesar Botura 1999
Esse trabalho utilizou para a etapa de defuzificação o método centróide por sero método de melhor resultado em comparação com os outros métodos disponíveis naferramenta FuzzyToolbox do Matlab.

52
3 Levantamento do Estado da Arte
(MACÊDO, 2012) em sua tese de mestrado apresenta um controle de ângulode passo para uma turbina eólica utilizando logica fuzzy. Para tal, reproduziu um ganhoproporcional aplicado ao erro da velocidade de rotação do eixo do rotor. Em seu trabalhofoi utilizado um controle integrado a um programa de simulação dinâmica, que simulavauma planta de geração elétrica a partir de diferentes fontes renováveis, dentre elas aeólica.
(CHOWDHURY; HOSSEINZADEH; SHEN, 2011), em sua publicação apresentadois métodos de sistema de controle de ângulo de passo baseado em lógica fuzzy. Oprimeiro determinando o comando de saída de potência baseado na movimentaçãoexponencial média (EMA) e o segundo utilizando seleções dinâmicas de referências desaída de potência, de acordo com o vento incidente. Tendo como resultado melhoriasna suavização das flutuações de potência.
(AMÊNDOLA, 2007), em sua tese de doutorado, avalia a utilização de controla-dores fuzzy aplicados aos controles do conversor back-to-back acoplado ao gerador,e controladores do ângulo de passo. Os resultados por ele encontrados são compa-rados com o desempenho de controladores PID submetidos à mesmas condições desimulação.
O trabalho desenvolvido por (VIEIRA et al., 2007), apresentou novas estratégiasde controle baseadas em lógica fuzzy, aplicadas aos conversores utilizados geradoresde indução duplamente alimentado. O trabalho contou com a utilização de estratégiasde controle fuzzy “look-up-table” com supervisão.
No trabalho desenvolvido por (VAN; NGUYEN; LEE, 2015) utiliza lógica fuzzypara controle do ângulo das pás de aerogeradores, contando com a implementaçãoda lógica em um sistema físico de bancada experimental. O modelo simulou o funcio-namento do controlador em uma turbina eólica que utiliza gerador síncrono de ímãspermanentes.
Em artigo publicado por (ZHANG et al., 2008), é apresentado a importância doefeito do controle do ângulo de passo em turbinas eólicas. Ele ressalta a vantagemda utilização da lógica fuzzy para tal aplicação, principalmente por não ser necessáriaa disposição de um modelo matemático para que seja realizado um controle. Comoresultado de sua pesquisa, mostra que a lógica fuzzy é capaz de alcançar performancesmelhores do que as desempenhadas por controladores convencionais.

53
4 Materiais e Métodos
As seções a seguir descrevem o modelo utilizado para a realização das simula-ções, o modelo de controlador proposto e a metodologia utilizada para o desenvolvi-mento do projeto.
4.1 Descrição geral do modelo utilizado para simulações
Este trabalho teve como base para as simulações o modelo Wind Farm –Average Model, disponível na biblioteca da plataforma Simulink. Este modelo simula umaerogerador conectado à uma rede de distribuição, com parâmetros disponibilizadospela fabricante General Electric (GE). A potência mecânica nominal do aerogerador é1,5 MW e o modelo foi criado para estudos de integração do sistema de geração àrede.
Algumas simplificações para a dinâmica de operação foram realizadas nessemodelo, como por exemplo a dinâmica do controle do conversor, simplificada atravésde equações algébricas. O gerador empregado na turbina é um gerador de induçãoduplamente alimentado, dotado de um sistema de excitação CA, baseado em umconversor CA/CC/CA. Outra simplificação do modelo é o fato de não possuir variáveisde estado mecânico para o rotor, essas são adicionadas no modelo mecânico da turbina.Outra simplificação é aplicada às variáveis de estado elétrico, que foram modificadaspara refletir os comandos recebidos dos controles elétricos enviados pelo conversor. Oconversor entrega aos terminais do gerador corrente ativa e reativa, funcionando comoum inversor de fonte de tensão (MILLER; PRICE; SANCHEZ-GASCA, 2002) .
No modelo, são realizados basicamente dois tipos de controle com o objetivo deotimizar a extração de potência ativa. Dessa forma, regula-se a velocidade do rotor demaneira a evitar sobrecargas no equipamento. Os controles atuam sobre o ângulo depasso e parâmetros de torque enviados ao conversor para controle eletromagnético dogerador.
Para modelagem da rede, o gerador é conectado a um barramento de distri-buição de 575 V. Este barramento é então conectado a um barramento do sistemacoletor através de um transformador, sendo que, as tensões utilizadas para o sistemacoletor reproduzem os níveis utilizados na distribuição real, na ordem de 25 kV. Acapacidade de potência reativa da máquina varia de Qmáx = 0,49 MVAr e Qmin = -0,73MVAr. A potência ativa mínima de saída para o modelo é de 0,2 MW(MILLER; PRICE;SANCHEZ-GASCA, 2002) .

Capítulo 4. Materiais e Métodos 54
4.2 Descrição do modelo da turbina eólica
O modelo da turbina eólica e suas características aerodinâmicas são modeladasconforme mostra a figura 23. Os valores padrão de configuração do modelo considerampotência ativa de saída nominal 1,5 MW; potência nominal do gerador elétrico 1,5/0,9MVA; velocidade de vento base de geração (velocidade média de regimes de ventoconsiderada); potência ativa gerada na velocidade base igual a 0,73 pu.
Figura 23 – Modelo da turbina eólica
Disponível nos documentos descritivos do software Matlab (2017)
O modelo tem como entradas a velocidade do vento e a realimentação davelocidade de giro do eixo do rotor, dessa forma, através das equações apresentadasna seção 2.2.
O modelo conta com recurso que apresenta as características e pontos deoperação da turbina, relacionando os valores de velocidade do vento, ângulo de passo,coeficiente de potência, relação de velocidades, velocidade de rotação da turbina epotência de saída, conforme apresentado nas figuras a seguir.
Figura 24 – Característica do coeficiente de potência da turbina (curvas incrementando oângulo de passo em 2 graus)
Gráfico presente no modelo Wind Farm Average Mode (2017)
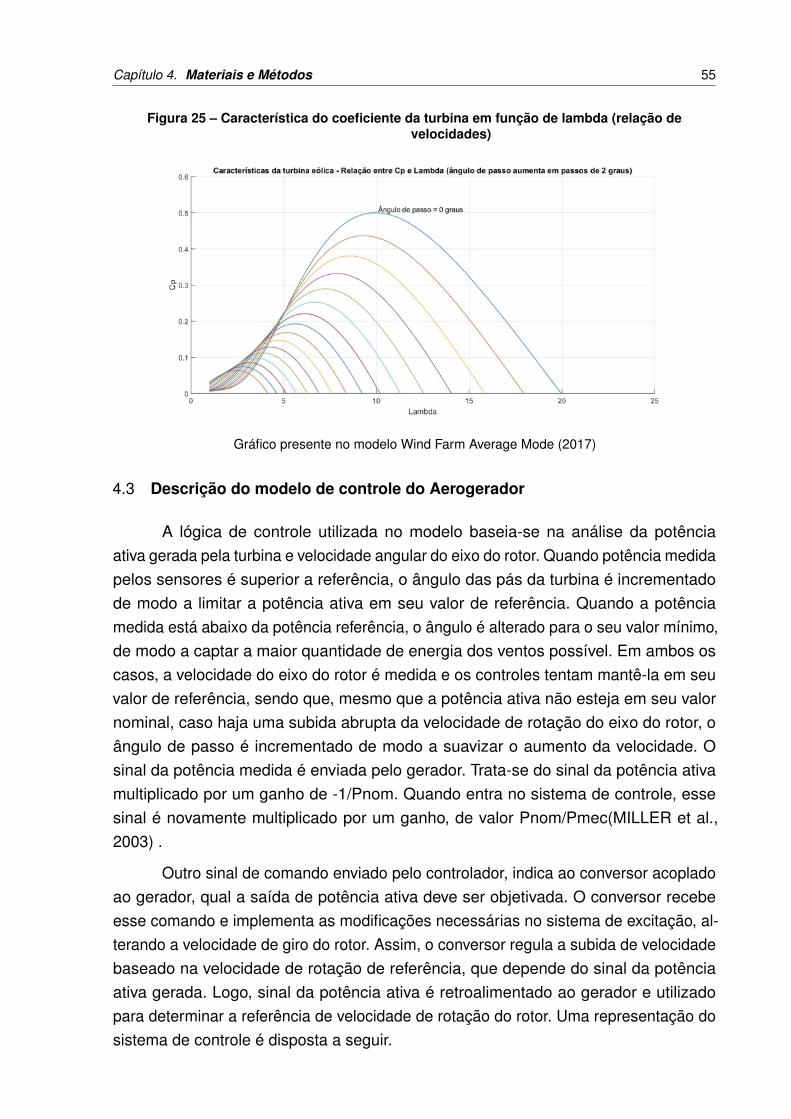
Capítulo 4. Materiais e Métodos 55
Figura 25 – Característica do coeficiente da turbina em função de lambda (relação develocidades)
Gráfico presente no modelo Wind Farm Average Mode (2017)
4.3 Descrição do modelo de controle do Aerogerador
A lógica de controle utilizada no modelo baseia-se na análise da potênciaativa gerada pela turbina e velocidade angular do eixo do rotor. Quando potência medidapelos sensores é superior a referência, o ângulo das pás da turbina é incrementadode modo a limitar a potência ativa em seu valor de referência. Quando a potênciamedida está abaixo da potência referência, o ângulo é alterado para o seu valor mínimo,de modo a captar a maior quantidade de energia dos ventos possível. Em ambos oscasos, a velocidade do eixo do rotor é medida e os controles tentam mantê-la em seuvalor de referência, sendo que, mesmo que a potência ativa não esteja em seu valornominal, caso haja uma subida abrupta da velocidade de rotação do eixo do rotor, oângulo de passo é incrementado de modo a suavizar o aumento da velocidade. Osinal da potência medida é enviada pelo gerador. Trata-se do sinal da potência ativamultiplicado por um ganho de -1/Pnom. Quando entra no sistema de controle, essesinal é novamente multiplicado por um ganho, de valor Pnom/Pmec(MILLER et al.,2003) .
Outro sinal de comando enviado pelo controlador, indica ao conversor acopladoao gerador, qual a saída de potência ativa deve ser objetivada. O conversor recebeesse comando e implementa as modificações necessárias no sistema de excitação, al-terando a velocidade de giro do rotor. Assim, o conversor regula a subida de velocidadebaseado na velocidade de rotação de referência, que depende do sinal da potênciaativa gerada. Logo, sinal da potência ativa é retroalimentado ao gerador e utilizadopara determinar a referência de velocidade de rotação do rotor. Uma representação dosistema de controle é disposta a seguir.

Capítulo 4. Materiais e Métodos 56
Figura 26 – Diagrama geral do controle utilizado no aerogerador presente no modelo
Nicholas W. Miller 2003
Para níveis de potência abaixo de 75% da potência nominal, a velocidade dereferência é obtida a partir da equação 4.1. Para potências acima de 75% da potêncianominal, a velocidade angular de referência é fixa em 1.2 pu.
wref = −0, 67P 2 + 1, 42P + 0, 51 (4.1)
O controle da turbina atua de forma a suavizar os efeitos de flutuação na saídada potência, causados pelas variações na velocidade do rotor.
4.3.1 Descrição do modelo do Controlador do ângulo de passo original (P + PI)
O controlador empregado no modelo do aerogerador utilizado para as simula-ções, conta com duas partes. A primeira fornece um sinal para o ângulo de passo apartir do erro da velocidade angular do eixo do rotor. A segunda, fornece um sinal parao ângulo de passo a partir do erro da potência ativa medida.
A parte que utiliza o erro da velocidade angular recebe o sinal do erro entre avelocidade medida e a de referência, conforme explicado na seção anterior. Esse erro,quando positivo, é então multiplicado por um ganho proporcional Kp. No momento emque a velocidade de rotação ultrapassa o valor da referência, o controle proporcional
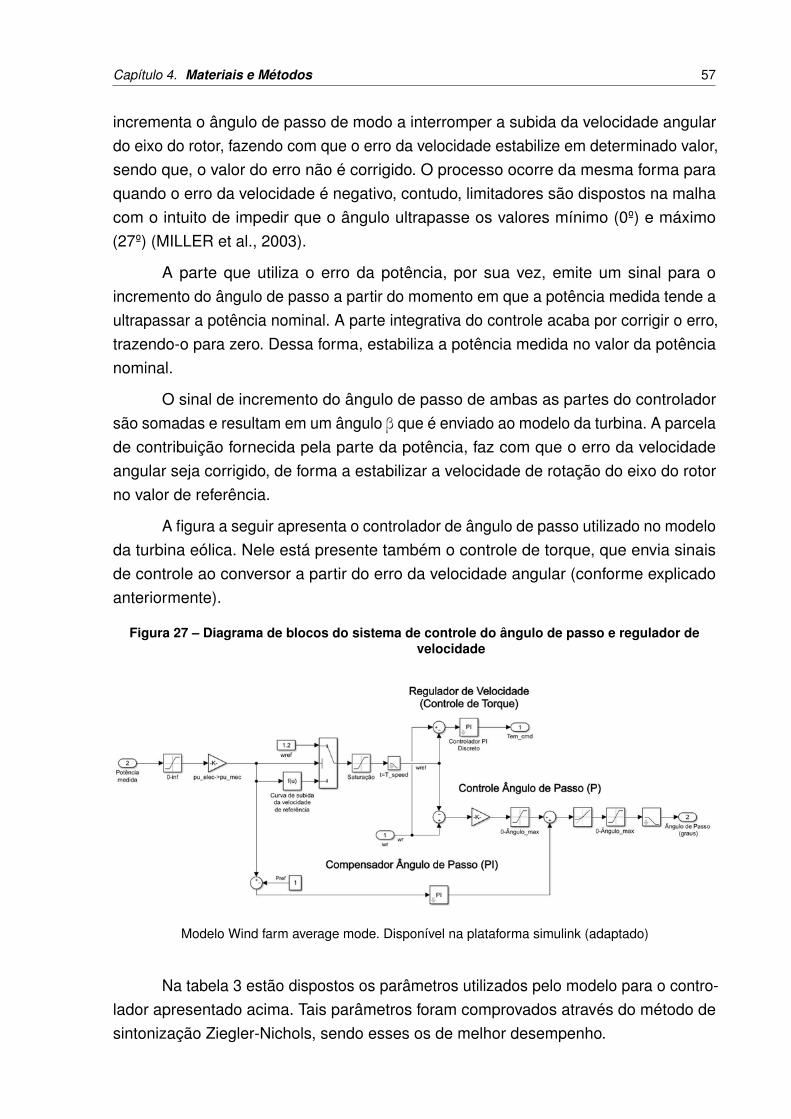
Capítulo 4. Materiais e Métodos 57
incrementa o ângulo de passo de modo a interromper a subida da velocidade angulardo eixo do rotor, fazendo com que o erro da velocidade estabilize em determinado valor,sendo que, o valor do erro não é corrigido. O processo ocorre da mesma forma paraquando o erro da velocidade é negativo, contudo, limitadores são dispostos na malhacom o intuito de impedir que o ângulo ultrapasse os valores mínimo (0º) e máximo(27º) (MILLER et al., 2003).
A parte que utiliza o erro da potência, por sua vez, emite um sinal para oincremento do ângulo de passo a partir do momento em que a potência medida tende aultrapassar a potência nominal. A parte integrativa do controle acaba por corrigir o erro,trazendo-o para zero. Dessa forma, estabiliza a potência medida no valor da potêncianominal.
O sinal de incremento do ângulo de passo de ambas as partes do controladorsão somadas e resultam em um ângulo β que é enviado ao modelo da turbina. A parcelade contribuição fornecida pela parte da potência, faz com que o erro da velocidadeangular seja corrigido, de forma a estabilizar a velocidade de rotação do eixo do rotorno valor de referência.
A figura a seguir apresenta o controlador de ângulo de passo utilizado no modeloda turbina eólica. Nele está presente também o controle de torque, que envia sinaisde controle ao conversor a partir do erro da velocidade angular (conforme explicadoanteriormente).
Figura 27 – Diagrama de blocos do sistema de controle do ângulo de passo e regulador develocidade
Modelo Wind farm average mode. Disponível na plataforma simulink (adaptado)
Na tabela 3 estão dispostos os parâmetros utilizados pelo modelo para o contro-lador apresentado acima. Tais parâmetros foram comprovados através do método desintonização Ziegler-Nichols, sendo esses os de melhor desempenho.

Capítulo 4. Materiais e Métodos 58
Tabela 3 – Parâmetros do controlador da turbina eólica
Parâmetro Valor
Ganhos regulador de velocidade [kp ki] [3 0.6]
Ganho controlador do ângulo de passo (P) [kp] 150
Ganhos controlador do ângulo de passo (PI) [kp ki] [3 30]
Ângulo de passo máximo (graus) 27
Modelo Wind farm average mode - Disponível na plataforma simulink
4.3.2 Modelagem do controlador do ângulo de passo proposto utilizando lógicafuzzy
A escolha da aplicação de um controlador fuzzy para o sistema em ques-tão, parte do desafio de modelar um sistema de controle, sem dispor de um modelomatemático, mesmo que o sistema a ser controlado seja de grande complexidade.Dessa forma, supondo o modelo Wind farm average mode como sendo um sistemacujos parâmetros e modelo matemático não são identificáveis, a análise de seu funcio-namento é suficiente para possibilitar a elaboração de uma lógica de controle.
O comportamento estocástico dos ventos, assim como a dinâmica não linear daturbina eólica, com controle ativo do ângulo de passo, são outros fatores que tornam ocontrole fuzzy um método atrativo a ser aplicado nesse tipo de sistema.
Segundo afirma (GOMIDE; GUDWIN, 1994) em seu trabalho sobre modelagemde sistemas de controle fuzzy, para a compreensão da influência desse controladorsobre determinado sistema, primeiramente deve-se testar controladores fuzzy maissimples, por exemplo, simulando um ganho proporcional e com poucas variáveislinguísticas. Pensando dessa forma, ao longo do desenvolvimento da lógica de controlefuzzy aplicado ao modelo já descrito, algumas tentativas mais simples de controladorforam testadas, e o conhecimento adquirido a cada etapa permitiu evoluir para a lógicafinal.
O controlador proposto baseia-se no modelo original disposto na biblioteca doSimulink, contudo, foi adaptado utilizando-se dois controladores fuzzy. Logo, o sinaldo ângulo de passo é o resultado da soma dos dois controladores fuzzy diferentes.O primeiro monitora o erro da velocidade angular e sua derivada, e o segundo mo-nitora o erro da potência medida e sua derivada. Para a dinâmica de operação foiconsiderado um atuador ideal, capaz de rápidas variações no ângulo de passo. Aprogramação dos controladores fuzzy foram desenvolvidos no ambiente Fuzzy Logic

Capítulo 4. Materiais e Métodos 59
Designer, disponível no software Matlab.
Figura 28 – Controlador do ângulo de passo utilizando lógica fuzzy
Autoria própria
• Escolha dos conjuntos fuzzy
Para nomear as funções de pertinência foram utilizadas as seguintes siglas:NL (negativo grande), NM (negativo médio), NS (negativo pequeno), ZE (zero), PS(positivo pequeno), PM (positivo médio), PL (positivo grande). Estas fazendo referênciaa intensidade das mudanças nas variáveis escolhidas. Foram testadas alguns tipos defunções de pertinência, como a gaussiana. Porém, o controlador utilizando funçõestrapezoidais, para delimitar os extremos do universo de discurso, e triangulares paramapear os valores intermediários aos limites, foi o que apresentou menores oscilaçõesna saída. Isso foi determinado para ambas as variáveis de entrada. Os universos dediscurso de cada uma das variáveis, bem como suas saídas são dispostas nas figurasa seguir.

Capítulo 4. Materiais e Métodos 60
Figura 29 – Funções de pertinência do controlador fuzzy que monitora o erro e derivada do erroda velocidade angular do eixo do rotor.
Autoria própria
Figura 30 – Funções de pertinência do controlador fuzzy que monitora o erro e derivada do erroda potência do eixo do rotor.
Autoria própria
De acordo com (SHAW; SIMÕES, 1999) , a quantidade de funções de perti-nência influenciam diretamente na precisão da saída do sistema fuzzy. Sendo que, 7
Capítulo 4. Materiais e Métodos 61
funções de pertinência são o suficiente para uma boa resolução, dado que acima dissonão há considerável melhora. A sobreposição das funções foi testada em diversas con-figurações, contudo as de melhor resultado foram sobreposições de aproximadamente50%.
• Determinação das regras fuzzy
Como dito no capítulo 2.5, as regras fuzzy relacionam as entradas do sistemacom as saídas. De acordo com (PEDRYCZ, 1995), o comportamento da derivadado erro associado a regras fuzzy bem definidas, permite que os tempos de subida,assentamento e erro de regime permanente sejam reduzidos em um sistema desegunda ordem com entrada tipo degrau unitário. Como indica a figura 31, nos pontosmarcados na curva as regras fuzzy são estabelecidas de maneira a se definir uma açãode controle adequada.
Figura 31 – Dinâmica da resposta de um processo de segunda ordem ao degrau unitário
Amendola, 2007
Dessa forma, foram definidas as seguintes regras fuzzy para o controlador amonitorar a velocidade de rotação do eixo do rotor.
Figura 32 – Regras fuzzy para controlador do ângulo de passo a partir da velocidade angular doeixo do rotor
Autoria própria

Capítulo 4. Materiais e Métodos 62
As regras marcadas por numerais em vermelho na figura foram definidas combase na análise dos valores de erro e derivada do erro. Dessa forma, a ação de controlenesses pontos, possibilita convergir a curva de determinado processo para um valor dereferência.
As regras responsáveis pelo monitoramento da potência partiram do mesmoprincípio das regras criadas para o controle da velocidade de rotação. Contudo, forammodificadas para que quando o erro da potência for negativo, por mais que ocorramvariações positivas grandes na derivada do erro, não haja alteração no ângulo de passo.Dessa forma, durante a subida da velocidade de giro e da potência medida, somentevariações muito abruptas da velocidade é que desencadearão uma ação de controledo sistema fuzzy.
Figura 33 – Regras fuzzy para controlador do ângulo de passo a partir da Potência
Autoria própria
• Inferência e Defuzzificação
O processo de inferência utilizado foi o Mamdani. A escolha desse métodobaseou-se na bibliografia levantada. Essa indica que para aplicações em que há umagrande variabilidade das condições sistêmicas, o método Mamdani possui melhorresultado que o método Takagi-Sugeno. Logo, como já dito anteriormente, o métodode inferência Mamdani basea-se na operação de intersecção, dada pelo operadormínimo (ou). Esse operador gera uma área a ser defuzzificada, a partir do menorgrau de pertinência das variáveis de entrada em seus dois universos de discursoparticulares, como mostrado na seção 2.3.3 (SIMOES; SHAW, 2007). A agregaçãoutilizada foi através do método dos máximos, que considera como área resultante, aser defuzzificada, a soma das áreas obtidas no procedimento de inferência.
Para o processo de defuzificação foi utilizado o método da centróide, poissegundo a bibliografia esse método permite melhor equilíbrio nos valores de saída do

Capítulo 4. Materiais e Métodos 63
sistema. Isso, associado a estratégia de criação das regras fuzzy, permite a ação deamortecimento do sinal da derivada do erro.
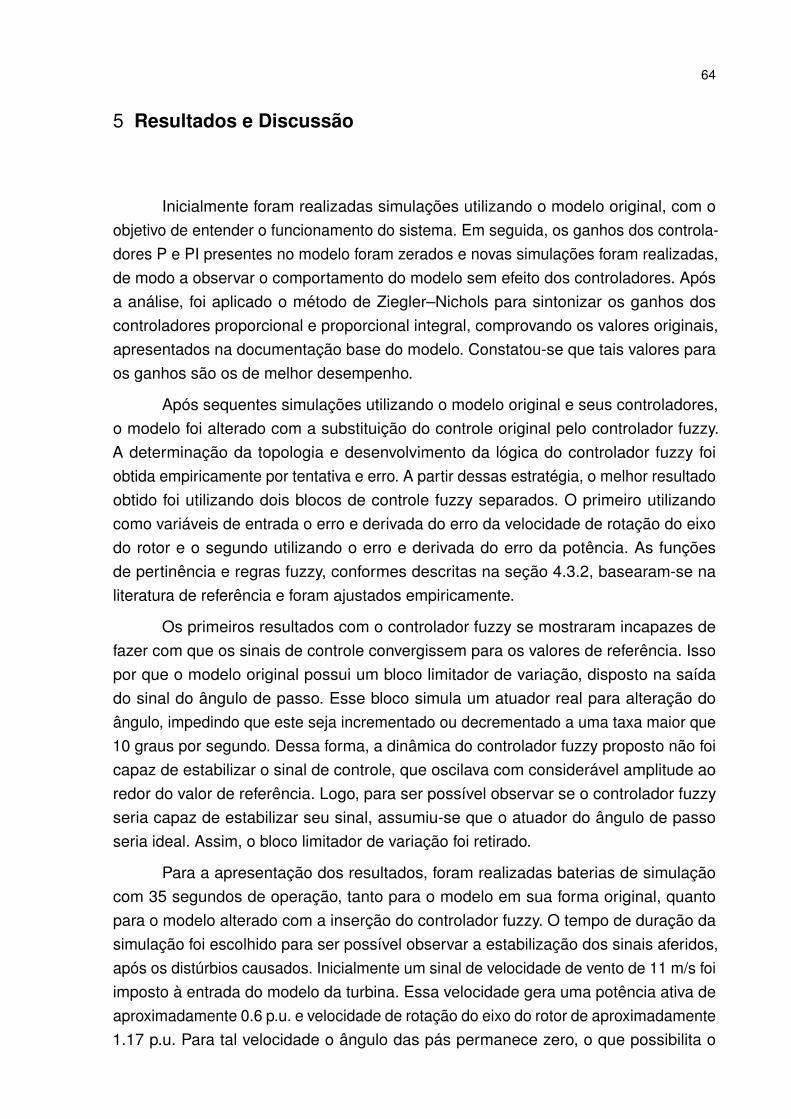
64
5 Resultados e Discussão
Inicialmente foram realizadas simulações utilizando o modelo original, com oobjetivo de entender o funcionamento do sistema. Em seguida, os ganhos dos controla-dores P e PI presentes no modelo foram zerados e novas simulações foram realizadas,de modo a observar o comportamento do modelo sem efeito dos controladores. Apósa análise, foi aplicado o método de Ziegler–Nichols para sintonizar os ganhos doscontroladores proporcional e proporcional integral, comprovando os valores originais,apresentados na documentação base do modelo. Constatou-se que tais valores paraos ganhos são os de melhor desempenho.
Após sequentes simulações utilizando o modelo original e seus controladores,o modelo foi alterado com a substituição do controle original pelo controlador fuzzy.A determinação da topologia e desenvolvimento da lógica do controlador fuzzy foiobtida empiricamente por tentativa e erro. A partir dessas estratégia, o melhor resultadoobtido foi utilizando dois blocos de controle fuzzy separados. O primeiro utilizandocomo variáveis de entrada o erro e derivada do erro da velocidade de rotação do eixodo rotor e o segundo utilizando o erro e derivada do erro da potência. As funçõesde pertinência e regras fuzzy, conformes descritas na seção 4.3.2, basearam-se naliteratura de referência e foram ajustados empiricamente.
Os primeiros resultados com o controlador fuzzy se mostraram incapazes defazer com que os sinais de controle convergissem para os valores de referência. Issopor que o modelo original possui um bloco limitador de variação, disposto na saídado sinal do ângulo de passo. Esse bloco simula um atuador real para alteração doângulo, impedindo que este seja incrementado ou decrementado a uma taxa maior que10 graus por segundo. Dessa forma, a dinâmica do controlador fuzzy proposto não foicapaz de estabilizar o sinal de controle, que oscilava com considerável amplitude aoredor do valor de referência. Logo, para ser possível observar se o controlador fuzzyseria capaz de estabilizar seu sinal, assumiu-se que o atuador do ângulo de passoseria ideal. Assim, o bloco limitador de variação foi retirado.
Para a apresentação dos resultados, foram realizadas baterias de simulaçãocom 35 segundos de operação, tanto para o modelo em sua forma original, quantopara o modelo alterado com a inserção do controlador fuzzy. O tempo de duração dasimulação foi escolhido para ser possível observar a estabilização dos sinais aferidos,após os distúrbios causados. Inicialmente um sinal de velocidade de vento de 11 m/s foiimposto à entrada do modelo da turbina. Essa velocidade gera uma potência ativa deaproximadamente 0.6 p.u. e velocidade de rotação do eixo do rotor de aproximadamente1.17 p.u. Para tal velocidade o ângulo das pás permanece zero, o que possibilita o

Capítulo 5. Resultados e Discussão 65
melhor aproveitamento aerodinâmico do vento com Cp em seu valor máximo igual a0,5.
Como é possível observar na figura 34, no instante 5s da simulação, a veloci-dade de vento foi incrementada por um degrau, subindo de 11 m/s para o valor de 15m/s. No modelo original, cujo controle do ângulo de passo é composto por um contro-lador proporcional e um controlador proporcional integral, é possível observar que avelocidade de rotação do eixo do rotor alcança um valor de 1,24 p.u. aproximadamente,sendo esse um overshoot de 3,2%. O valor é então corrigido e se estabiliza no valor dereferência (1,2 p.u.) aproximadamente no instante 20 s. A potência ativa vai de 0,6 p.u.para aproximadamente 0,97 p.u. e é corrigida para o valor de aproximadamente 0,9 p.u.estabilizando-se no instante 12,5 s. Já o controlador fuzzy, sofre um overshoot de 3%no valor da velocidade de rotação do eixo do rotor, alcançando o valor de 1,23 p.u. e seestabiliza no instante 30 s aproximadamente. Já a potência ativa aumenta de 0,6 p.u.para 0,95 p.u. estabilizando-se nesse valor no instante 10 s.
Como é possível observar na figura 36, no controlador fuzzy, a parte do controledo ângulo de passo da turbina que monitora a velocidade de rotação, envia um sinalpara incremento do ângulo de passo no instante 5,1 s. No instante 6,2 s em que é apotência medida que supera o valor de sua referência, a parte do controle fuzzy quemonitora tais variáveis passa a contribuir com o sinal de incremento para o ângulode passo, de forma a corrigir o erro da potência. Logo, o ângulo de passo sai de seuvalor de melhor captação de energia cinética (zero graus) e se estabiliza no valor deaproximadamente 8 graus. Com o aumento do ângulo de passo, o valor do coeficientede potência é reduzido, o que significa menor captação de energia cinética pelas páse consequente menor potência mecânica gerada. Na figura 37 é possível observar odecréscimo de Cp de seu valor ótimo de 0,5 para o valor de aproximadamente 0,29,seguindo o comportamento da turbina descrito na seção 4.2. O controle original domodelo (P e PI) funciona de forma semelhante, contudo, o tempo de resposta paraa parte que monitora a velocidade de rotação do eixo do rotor atua no instante 5,4 s.Outra diferença é a presença de maiores oscilações no sinal de controle apresentadopelo controlador fuzzy. Isso se justifica pela diferença entre os controladores, sendoque o controle fuzzy é baseado no comportamento da derivada do erro, podendo serconsiderado um controle PD.
É possível observar ainda nas figuras 34 e 37 o efeito da oscilação do sinaldo ângulo na velocidade de rotação do eixo do gerador, bem como sua reflexão napotência e torque mecânico, que sofre oscilações com amplitude da ordem de 0.1 pu.O controle fuzzy resulta em uma estabilização do torque mecânico em um valor demaior módulo, comparado ao valor obtido com o controle original. Isso significa quemaior potência é extraída do gerador.

Capítulo 5. Resultados e Discussão 66
Como é possível observar na figura 35, o sinal da derivada do erro possui altaoscilação, sendo que, o resultado da soma entre os dois sinais de controle dos blocosfuzzy (erro e derivada do erro da velocidade de rotação do eixo do rotor e erro ederivada do erro da potência medida) geram uma maior oscilação no sinal resultante.Principalmente pelo fato de as regras fuzzy, aplicadas ao segundo controlador fuzzy querecebe os dados da potência, terem sido modificadas para não refletirem saída quandona presença de potências muito abaixo da referência. Logo, os ciclos de amortecimentodo sinal da derivada da potência, descritos na seção 4.3.2, foram prejudicados.
Figura 34 – Resposta da potência ativa, velocidade de rotação e ângulo de passo a partir daação do controlador original do modelo e do controle fuzzy para uma variação de
vento de 11 m/s a 15 m/s
Autoria própria (2017)
Figura 35 – Comportamento do erro da velocidade de rotação e erro da potência medida parauma variação de vento de 11 m/s a 15 m/s
Autoria própria (2017)

Capítulo 5. Resultados e Discussão 67
Figura 36 – Sinal de saída do controlador original do modelo e do controlador fuzzy para umavariação de vento de 11 m/s a 15 m/s
Autoria própria (2017)
Figura 37 – Resposta do torque mecânico, coeficiente de potência e relação de velocidades docontrolador originais do modelo e do controlador fuzzy para uma variação de vento
de 11 m/s a 15 m/s
Autoria própria (2017)
Foram realizadas novas simulações com 35 segundos de operação. Dessa veza velocidade foi alterada de 11 m/s para 22 m/s.
Na figura 38, é possível observar o comportamento oscilatório do sinal enviadopelo controlador fuzzy para o ângulo de passo, acentuado principalmente pela somaentre os sinais dos dois blocos de controle fuzzy que utilizam o erro e derivada do errocomo varíaveis de entrada, assim como já explicado anteriormente. Tal oscilação érefletida nos sinais de velocidade de rotação, potência ativa gerada e torque mecânico.
Capítulo 5. Resultados e Discussão 68
Contudo, a oscilação transmitida tanto para a velocidade de rotação do eixo do rotorquanto para a potência ativa é pequena comparada a oscilação proporcionada pelocontrole original do modelo. Oscilações de grande amplitude e frequência podem setornar um fator prejudicial ao sistema, pois ocasionam desgastes e aumento na chancede falha estrutural dos componentes do aerogerador.
Ainda na figura 38, observando o sinal da velocidade de rotação do eixo dorotor, é possível observar que o overshoot presente no sistema utilizando o controlefuzzy foi de aproximadamente 4%, chegando a velocidade de 1,25 p.u. Este valor éconsiderado seguro para o equipamento, já que pelas informações no descritivo domodelo, a velocidade máxima de rotação permitida é 1.3 pu. A potência ativa, apesardo abrupto aumento da velocidade do vento, tem seu valor aumentado de 0,6 p.u. paraaproximadamente 1,0 p.u. estabilizando-se no instante 10 s. É possível observar aindaa presença de um erro de regime permanente para o controle fuzzy, sendo que o valorfinal da potência ativa de saída é aproximadamente 1,09 p.u.
Já o controle original do modelo apresenta um overshoot maior para a velocidadede rotação do eixo do rotor (aproximadamente 14% do valor de referência), chegando a1,4 p.u. e estabilizando-se no valor de referência de 1,2 p.u. no instante 25 s. A potênciaativa sofre um overshoot de 16% do valor de referência, porém, diferentemente docontrole fuzzy, o valor é corrigido para níveis abaixo da potência nominal, estabilizando-se na potência de aproximadamente 0,9 p.u. O que significa que o potêncial elétrico dosistema não é utilizado de maneira ótima.
Na figura 41, é possível observar que o sinal do torque mecânico resultante docontrole fuzzy apresenta uma variação de menor amplitude em relação ao controleoriginal do modelo. Outro detalhe a ser observado é que, assim como nas simulaçõesvariando a velocidade de vento de 11 m/s para 15 m/s, o sinal do torque mecânicose estabiliza em um valor de maior módulo no modelo que utiliza o controlador fuzzy,possibilitando maior extração de potência ativa.
Ainda na figura 41, é possível observar que, para o controle fuzzy, o coeficientede potência (Cp) tem seu sinal estabilizado no valor de aproximadamente 0,1 no instante12,5 s e a relação de velocidades (lambda) se estabiliza no valor de aproximadamente5 no instante 10 s. Já o controle original do modelo, apesar de estabilizar os valoresde Cp e lambda em valores muito próximos dos obtidos pelo controle fuzzy, levammais tempo para a estabilização do sinal. Sendo que Cp se estabiliza no instante deaproximadamente 20 s e lambida em aproximadamente 25 s.

Capítulo 5. Resultados e Discussão 69
Figura 38 – Resposta da potência ativa, velocidade de rotação e ângulo de passo a partir daação do controlador original do modelo e do controle fuzzy para uma variação de
vento de 11 m/s a 22 m/s
Autoria própria (2017)
Figura 39 – Resposta do erro da velocidade de rotação e erro da potência medida para umavariação de vento de 11 m/s a 22 m/s
Autoria própria (2017)
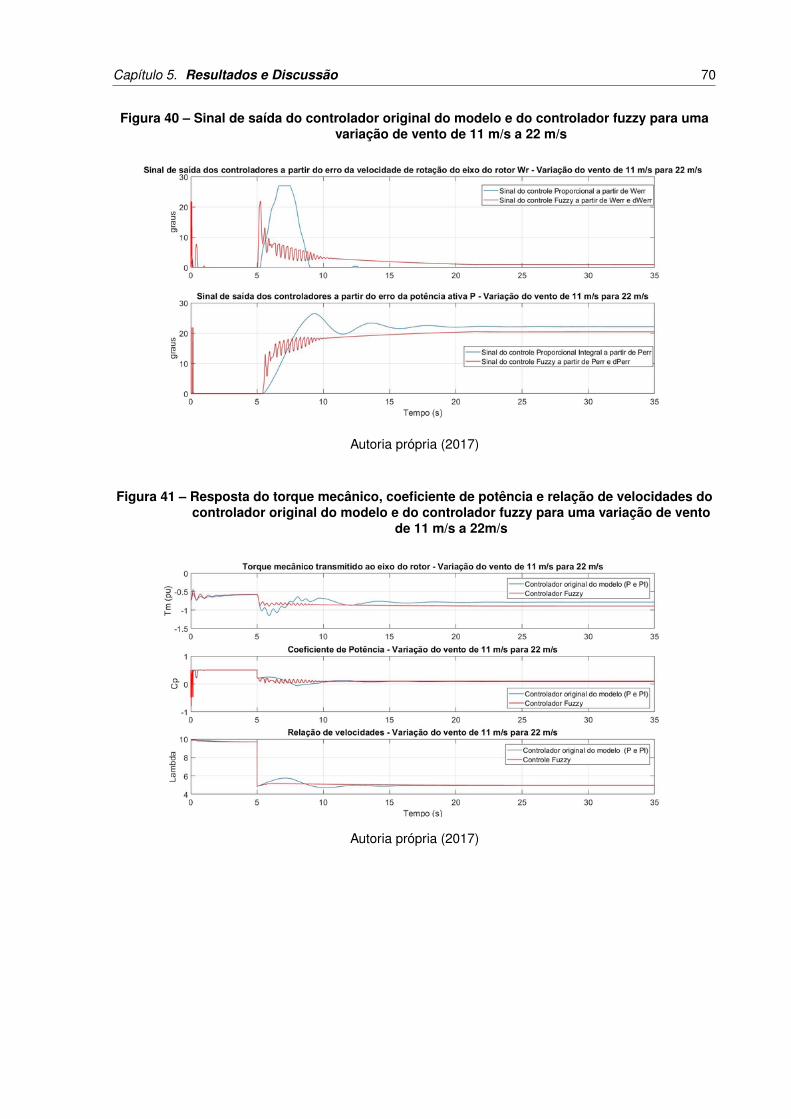
Capítulo 5. Resultados e Discussão 70
Figura 40 – Sinal de saída do controlador original do modelo e do controlador fuzzy para umavariação de vento de 11 m/s a 22 m/s
Autoria própria (2017)
Figura 41 – Resposta do torque mecânico, coeficiente de potência e relação de velocidades docontrolador original do modelo e do controlador fuzzy para uma variação de vento
de 11 m/s a 22m/s
Autoria própria (2017)

71
6 Conclusão
Neste trabalho foram apresentados os resultados de simulações utilizando omodelo Wind Farm Average Mode presente na biblioteca da plataforma Simulink nosoftware Matlab, bem como os resultados obtidos a partir de controlador propostobaseado em lógica fuzzy.
Foi realizado um estudo sobre o panorama global e brasileiro do mercado eólico,mostrando que, mundialmente a energia eólica se mostra promissora. Os principaisfatores para tal é a disponibilidade de ventos ao redor do planeta e as tecnologiascada vez mais baratas e eficientes. Contudo, no Brasil devido aos problemas politico-economicos enfrentados, o mercado eólico sofre com incertezas e falta de infraestruturapara a distribuição da energia gerada.
Realizou-se um estudo histórico a respeito da utilização dos ventos para geraçãode trabalho e energia elétrica, mostrando os principais avanços tecnológicos obtidosao longo do tempo. Tal estudo está disposto no Anexo A.
A teoria física aerodinâmica considerada na geração eólica foi apresentada,juntamente com um levantamento das tecnologias mais recentes e utilizadas paraconstrução de aerogeradores. Mostrou-se diferentes topologias de construção deturbinas eólicas, apresentando suas vantagens e desvantagens e os elementos quecompõem um aerogerador. Através desse estudo, conclui-se que os aerogeradoresmais difundidos na industria eólica atualmente são os de eixo horizontal dotadosde geradores de indução duplamente alimentados. Principalmente pela eficiência nageração de energia desempenhada por essa topologia. A descrição geral dos principaiscomponentes que compõem a topologia de um aerogerador de eixo horizontal estádisposta no Anexo B.
O estudo acerca do controle de potência de turbinas eólicas demonstrou asdiferenças entre os sistemas de velocidade fixa e variável. Além disso, foi apresen-tado que o controle ativo do ângulo de passo é a melhor estratégia para operaçãode aerogeradores visando otimização da extração de energia. Sendo que o controleproporcional integral é amplamente utilizado para essa aplicação.
Foram apresentados os conceitos e metodologias para a criação de um con-trolador utilizando lógica fuzzy. Através desse estudo, foi possível o desenvolvimentodo controlador fuzzy proposto ao modelo Wind Farm Average Mode disponível naplataforma Simulink. Esse modelo foi apresentado neste trabalho e sua lógica geraldescrita.
O modelo de controle fuzzy proposto se mostrou eficiente na limitação da saída
Capítulo 6. Conclusão 72
de potência gerada, bem como no controle da velocidade de rotação do eixo dorotor. Mesmo após sofrer acréscimos acentuados de vento, o controle do ângulo daspás fez com que a velocidade de rotação do eixo do rotor apresentar um overshootseguro em relação aos valores definidos pelo fabricante. Ao contrário do controladororiginal disposto no modelo que, quando submetido a uma grande variação no ventoincidente no aerogerador, apresentou overshoots na velocidade de rotação do eixo dorotor superiores ao pré estabelecido pelo fabricante (1,3 p.u.). Através dos resultadosobtidos, é possível uma avaliação do comportamento aerodinâmico da turbina eólica.
Apesar da alteração do modelo original para a implantação do modelo decontrole fuzzy, de modo que a saída do controlador conta com um atuador ideal semlimite de taxa de variação do ângulo de passo, o controlador proposto mostrou-seeficiente no controle da potência e velocidade de rotação do eixo do rotor.
Foi possível avaliar o efeito das regras fuzzy na saída do sinal do ângulo de passo.Percebeu-se também o efeito oscilatório do ângulo de passo nos sinais de potênciaativa, velocidade de rotação do eixo do rotor e torque em ambos os controladores,de modo que tais oscilações podem ter um efeito negativo no que diz respeito adesgastes mecânicos e vida útil dos equipamentos. A diferença em tais efeitos entre oscontroladores se dá pela maior amplitude de oscilação do torque no controle original (Pe PI) e maior frequência de oscilação no controle fuzzy.
Apesar de tais oscilações, o controlador fuzzy mostrou-se mais eficaz que ocontrole original do modelo, principalmente pelo fato de manter uma potência ativa desaída mais próxima a nominal em regime permanente. Resultando em uma geraçãomais eficiente.
Para trabalhos futuros, é possível destacar os seguintes itens:
• Realizar um comparativo do desempenho do controlador proposto com outroscontroladores.
• Implementar o controle em situações de ventos de maior oscilação.
• Considerar atuadores com dinâmicas mais próximas da realidade.
• Análise do desempenho do controle do ângulo de passo sob aspecto de influenciana rede.
• Elaborar um sistema de proteção para situações em que a velocidade de rotaçãoexcede os limites permitidos, e realizar a parada da máquina com o auxílio docontrole do ângulo de passo.
• Utilizar estratégias de sintonia do sinal de saída do ângulo de passo, de modo areduzir a amplitude das oscilações e o tempo de amortecimento.

Capítulo 6. Conclusão 73
• Utilizar estratégias heurísticas de inteligência artificial para otimizar a resposta docontrolador em regimes de grande variação de vento.

74
Referências
ACKERMANN, T. Wind Power in Power Systems. [S.l.]: John Wiley and Sons, ltd, 2005.
AKHMATOV, V. Analysis of dynamic behaviour of electric power systems with largeamount of wind power. [S.l.]: Technical university of Denmark, 2003.
AMÊNDOLA, C. A. M. Contribuição ao estudo de aerogeradores de velocidade e passovariáveis com gerador duplamente alimentado e sistema de controle difuso. 2007.216 p. Tese (Doutorado em Engenharia Elétrica) — Universidade de São Paulo, SãoCarlos.
BOTURA, C. A. et al. Lógica Difusa Aplicada ao Controle Ativo de um Combustor doTipo Tubo de Rijke. In: IV CONGRESSO BRASILEIRO DE REDES NEURAIS, 1999,São José dos Campos. São José dos Campos, 1999. p. 108 – 113.
BOYLE, G. Renewable Energy - Power for a sustainable future. 2. ed. [S.l.]: Oxford,2004. ISBN 0-19-926178-4.
BRASIL, G. do. COP-22 inicia regulamentação do Acordo de Paris.2016. Disponível em: <http://www.brasil.gov.br/meio-ambiente/2016/11/cop-22-inicia-regulamentacao-do-acordo-de-paris>. Acesso em: 21/12/2017.
CHOWDHURY, M. A.; HOSSEINZADEH, N.; SHEN, W. Fuzzy logic systems forpitch angle controller for smoothing wind power fluctuations during below rated windincidents. In: 2011 IEEE TRONDHEIM POWERTECH IS - SN - VO - VL -, 2011. [S.l.],2011. p. 1 – 7.
COX, E. The fuzzy system handbook. [S.l.]: Ap Professional, 1994.
DOBBIN, T. Modelagem e controle de um aerogerador duplamente alimentado comturbina de velocidade variável para estudos de estabilidade eletromecânica. 2014.163 p. Dissertação (Mestrado em Engenharia Elétrica) — Universidade Federal do Riode Janeiro, Rio de Janeiro.
FADIGAS, E. A. F. A. Energia eólica. 1. ed. [S.l.]: Manole, 2011. v. 1. ISBN978-85-204-3004-0.
FERNANDES, R. T. Supervisão de um sistema híbrido eólico/diesel usando lógicafuzzy. 2005. 118 p. Dissertação (Mestrado em Engenharia Elétrica) — UniversidadeFederal do Mato Grosso do Sul.
FRANKFURT SCHOOL OF FINANCE MANAGEMENT GGMBH. Global Trends inRenewable Energy Investments. Frankfurt School-UNEP, Frankfurt, p. 1 – 90, 2017.
GASCH, R.; TWELE, J. Wind power plants - Fundamentals, Design, Construction andoperation. [S.l.]: Springer, 2012.
GASPAR, J. F. P. Gerador Síncrono de Imanes Permanentes para Microgeração Eólica.2013. 36 p. Dissertação (Engenharia Eletromecânica) — UNIVERSIDADE DA BEIRAINTERIOR.
Referências 75
GOMIDE, F. A. C.; GUDWIN, R. R. Modelagem, controle, sistemas e lógica fuzzy. SBAControle & Automação 4.3, v. 1, n. 1, p. 97 – 115, 1994.
GWEC. Global Wind Market Report. 2016. Disponível em: <http://files.gwec.net/register?file=/files/GWR2016.pdf>. Acesso em: 25/07/2017.
JOHNSON, G. L. Wind energy systems. [S.l.]: Manhattan KS, 2006.
MACÊDO, A. V. de A. Controle do ângulo de passo de uma turbina eólica utilizandológica Fuzzy. 2012. 73 p. Dissertação (Mestrado em Engenharia Elétrica) —Universidade Federal de Campina Grande, Campina Grande.
MANWELL, J. F.; MCGOWAN, J. G. Wind energy explained : theory, design, andapplication. Segunda. Reino Unido: Wiley, 2009. ISBN 978-0-470-01500-1.
MATHEW, S. Wind Energy - Fundamentals, Resource Analysis and Economics. [S.l.]:Springer, 2006.
MENDES, V. F. Avaliação do comportamento de um sistema de conversão de energiaeólica utilizando gerador de indução duplamente excitado durante afundamentosde tensão equilibrados e desequilibrados. 2009. 193 p. Dissertação (Mestrado emEngenharia Elétrica) — Universidade Federal de Minas Gerais, Belo Horizonte.
MILLER, N. W.; PRICE, W. W.; SANCHEZ-GASCA, J. J. Dynamic modeling of GE 1.5and 3.6 wind turbine-generators. [S.l.], 2002.
MILLER, N. W. et al. Dynamic modeling of GE 1.5 and 3.6 MW wind turbine-generatorsfor stability simulations. In: 2003 IEEE POWER ENGINEERING SOCIETY GENERALMEETING (IEEE CAT. NO.03CH37491) IS - SN -, 2003. [S.l.], 2003. v. 3, p. 1977–1983– 3.
NELSON, V. Wind Energy - Renewable energy and the environment. [S.l.]: CRC Press,2009. ISBN 978-1-4200-7568-7.
PATEL, M. R. Wind and solar power systems - Design, analysis and operation. 2. ed.[S.l.]: Taylor & Francis, 2006. ISBN 0-8493-1570-0.
PEDRYCZ, W. Fuzzy Sets Engineering. [S.l.]: CRC Press, 1995. ISBN 0-8493-9402-3.
QUAGLINO, M. A. Biografia Charles Brush. 2002. Disponível em: <http://www.dee.ufrj.br/Museu/brush.html>. Acesso em: 01/08/2017.
RAGHEB, M. Wind generators history. 2014.
REIS, L. O. M. dos. Lógica fuzzy aplicada ao controle de um sistema híbrido degeração de energia elétrica: Eólica, fotovoltaica e biogás. 2002. 181 p. Tese (Doutoradoem Engenharia Mecânica) — Universidade Estadual Paulista Júlio de Mesquita Filho,Guaratinguetá.
RYAN, J. Trump tem plano para salvar carvão e travar energialimpa. 2017. Disponível em: <https://exame.abril.com.br/economia/trump-tem-plano-para-salvar-carvao-e-travar-energia-limpa/>. Acesso em:19/12/2017.

Referências 76
SECRETARIAT, R. Renewables 2017 Global Status Report. Paris: [s.n.], 2017. Globalstatus report. ISBN 978-3-9818107-6-9.
SENA, F. das Chagas Barbosa de. Controle fuzzy aplicado à otimização de um sistemaeólico de velocidade variável. 2015. 76 p. Dissertação (Mestrado em Sistemas deComunicação e Automação) — Universidade Federal Rural do Semi-Árido, Mossoró.
SHAW, I. S.; SIMÕES, M. Controle e modelagem fuzzy. [S.l.]: Edgard Blucher Ltda,1999.
SIMOES, M. G.; SHAW, I. S. Controle e modelagem fuzzy. 1. ed. [S.l.]: Blucher, 2007.v. 1.
U.S. DEPARTMENT OF ENERGY, 2008. National Renewable Energy Laboratory,Austin.
VAN, T. L.; NGUYEN, T. H.; LEE, D. C. Advanced Pitch Angle Control Based onFuzzy Logic for Variable-Speed Wind Turbine Systems. IEEE Transactions on EnergyConversion, v. 30, n. 2, p. 578 – 587, 2015.
VICENTE, A. L. G. Simulações de um gerador de indução duplamente alimentadofrente a afundamentos de tensão. 2013. 115 p. Monografia (Graduação em Engenhariade Energias renováveis) — Universidade Federal do Pampa, Bagé.
VIEIRA, J. P. A. et al. Novas Estratégias de Controle Fuzzy Aplicadas ao Conversor doDFIG para Melhoria da Estabilidade Transitória em Sistemas Eólicos. IEEE LATINAMERICA TRANSACTIONS, v. 5, n. 3, p. 143 – 150, Junho 2007.
VOLTOLINI, H. Modelagem e controle de geradores de indução duplamentealimentados com aplicação em sistemas eólicos. 2007. 157 p. Tese (Doutorado emEngenharia Elétrica) — Universidade Federal de Santa Catarina, Florianópolis.
WAGNER, H.; MATHUR, J. Introduction to wind energy systems. [S.l.]: Springer, 2009.
ZHANG, J. et al. Pitch angle control for variable speed wind turbines. In: 2008 THIRDINTERNATIONAL CONFERENCE ON ELECTRIC UTILITY DEREGULATION ANDRESTRUCTURING AND POWER TECHNOLOGIES IS - SN - VO - VL -, 2008. [S.l.],2008. p. 2691 – 2696.

Anexos
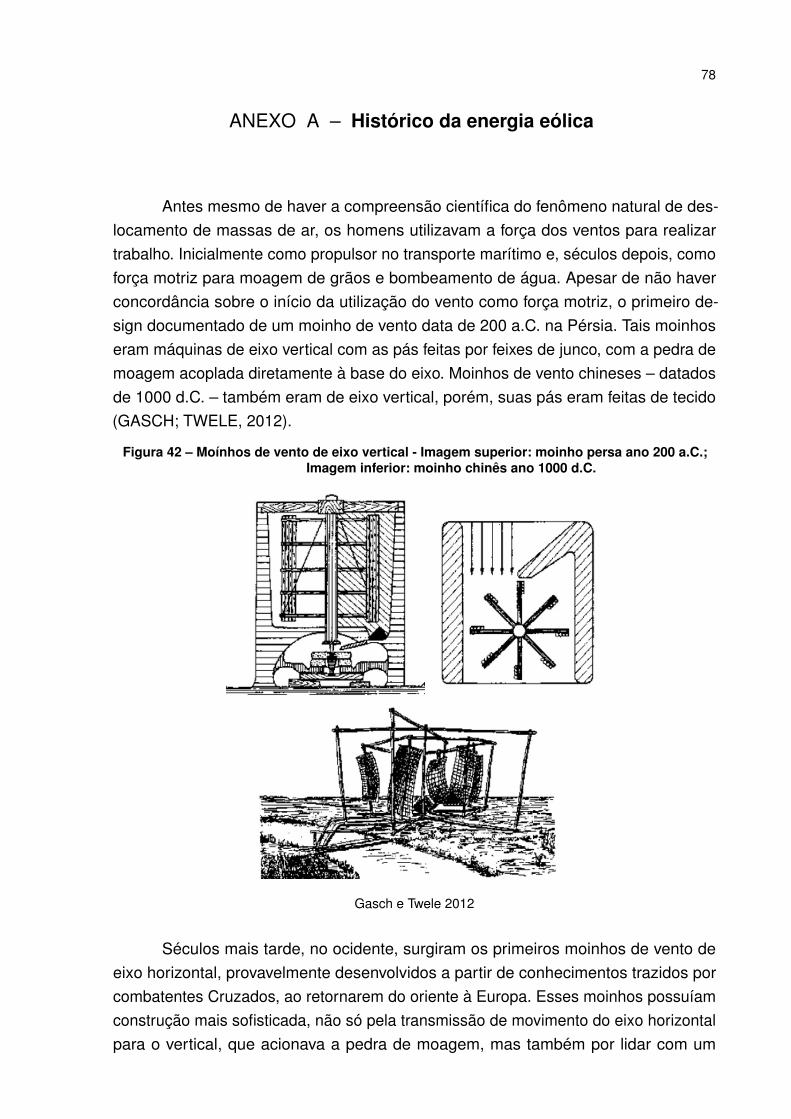
78
ANEXO A – Histórico da energia eólica
Antes mesmo de haver a compreensão científica do fenômeno natural de des-locamento de massas de ar, os homens utilizavam a força dos ventos para realizartrabalho. Inicialmente como propulsor no transporte marítimo e, séculos depois, comoforça motriz para moagem de grãos e bombeamento de água. Apesar de não haverconcordância sobre o início da utilização do vento como força motriz, o primeiro de-sign documentado de um moinho de vento data de 200 a.C. na Pérsia. Tais moinhoseram máquinas de eixo vertical com as pás feitas por feixes de junco, com a pedra demoagem acoplada diretamente à base do eixo. Moinhos de vento chineses – datadosde 1000 d.C. – também eram de eixo vertical, porém, suas pás eram feitas de tecido(GASCH; TWELE, 2012).
Figura 42 – Moínhos de vento de eixo vertical - Imagem superior: moinho persa ano 200 a.C.;Imagem inferior: moinho chinês ano 1000 d.C.
Gasch e Twele 2012
Séculos mais tarde, no ocidente, surgiram os primeiros moinhos de vento deeixo horizontal, provavelmente desenvolvidos a partir de conhecimentos trazidos porcombatentes Cruzados, ao retornarem do oriente à Europa. Esses moinhos possuíamconstrução mais sofisticada, não só pela transmissão de movimento do eixo horizontalpara o vertical, que acionava a pedra de moagem, mas também por lidar com um

ANEXO A. Histórico da energia eólica 79
eixo maior, de maior massa e de maior velocidade de rotação. Os moinhos de eixohorizontal mais antigos já registrados são conhecidos como post wind-mill 43, tendoeste nome pelo fato de toda sua estrutura ser construída em torno de um pilar central,o que permitia girar todo o moinho manualmente, ajustando-o através de uma hastepara posicioná-lo na direção do vento(RAGHEB, 2014).
Figura 43 – Moinho de vento de eixo horizontal - Post windmill
Gasch e Twele, 2012
Na Holanda, além da moagem de grãos, os moinhos tiveram fundamentalimportância na drenagem de áreas conhecidas como “pôlder”. Essas áreas eram muitocomuns nos Países Baixos. Eram terrenos alagados que após serem cercados pordiques, protegendo-os do mar, eram drenados e aproveitados para a agricultura. Paracumprir tais propósitos, não mais tendo como objetivo moer grãos, os post wind-millsforam adaptados. A pedra de moagem foi substituída por engrenagens, que transmitiamo movimento do eixo do rotor até a base do moinho, onde era posicionado um parafusode Arquimedes. Essa nova configuração recebeu o nome de Wipmolen.
Outros modelos e mecanismos foram desenvolvidos posteriormente a essesapresentados, diferindo em disposição estrutural e materiais de fabricação, como é ocaso dos tower mills utilizados nos países mediterrâneos no século XIV. Destinadosprincipalmente a irrigação, possuíam a torre do moinho feita de pedra, as pás eram

ANEXO A. Histórico da energia eólica 80
numerosas velas de tecido e alguns possuíam a capacidade de ajuste da parte superiorda torre de acordo com a direção do vento. Outro exemplo são os Dutch smock mills,que apesar de possuírem uma torre similar aos tower mills, eram feitos totalmente demadeira. Desenvolvidos no século XVI tornaram-se a tecnologia mais difundida entreos moinhos, tendo influenciado fortemente todos os modelos subsequentes, como é ocaso dos Paltrock windmills – século XVII e Gallery windmills – século XVIII (GASCH;TWELE, 2012). Na 44 é disposta uma relação cronológica dos moinhos.
Figura 44 – Ordem cronológica de alguns modelos de moinhos de vento de eixo horizontal
Gasch e Twele 2012
Ainda no século XVII, surge na Europa um conceito totalmente novo de moinhode vento. Proposto por Leupold Jacob em 1724, o novo modelo possuía direcionamentoauto regulável da hélice – esta composta por oito pás. Cada uma das pás – bemmenores que as pás dos moínhos anteriores – era capaz de girar em seu próprio eixo,sendo limitadas por um sistema de molas. Dessa maneira, conforme a intensidade devento aumentasse, as lâminas eram anguladas, mantendo a velocidade de rotação emuma faixa segura para os elementos mecânicos do moinho. A turbina movimentava umpistão através de um virabrequim, realizando o bombeamento de água. Apesar dosavanços tecnológicos, o modelo não teve muito sucesso na Europa. Contudo, a partirde 1870 passou a ser amplamente difundido nos Estados Unidos, após sofrer algumasmodificações, sob o nome de american windmill (WAGNER; MATHUR, 2009).

ANEXO A. Histórico da energia eólica 81
Figura 45 – Moinho de vento de eixo horizontal - American windmill séc XIX
M.RAGHEB 2014
O american windmill (45) possuía um maior número de pás, que eram fabricadasem lâminas de alumínio, variando em quantidade nos diferentes modelos. Eram deextrema simplicidade na fabricação, montagem e manutenção. Diferente dos antigosmoinhos e suas enormes estruturas feitas em pedra ou madeira, os american windmilleram sustentados por treliças metálicas, facilitando a instalação e realocação doequipamento quando necessário. A substituição de componentes e troca de peçasentre moinhos era muito fácil. Com funcionamento totalmente autônomo, o americanwindmill tornou-se o primeiro moinho de fabricação industrial. O modelo contavacom wind vanes (espécie de grimpa) perpendiculares à hélice, responsáveis pelodirecionamento do rotor. Como proteção contra ventos de velocidade excessiva, oângulo das pás era alterado. Outra forma de limitação da velocidade de rotação domoinho era o posicionamento de wind vanes auxiliares, de modo à desviar a turbinada direção do vento. Graças ao trabalho desempenhado pelos american windmillsno bombeamento de águas subterrâneas, o desenvolvimento do interior dos EstadosUnidos foi possível e, apesar da avançada tecnologia que possuímos hoje (comparadaao século XIX), muitos exemplares deste modelo ainda estão em atividade mundo afora(GASCH; TWELE, 2012).
O primeiro registro da utilização do vento para geração de energia elétrica datade 1887 na Escócia. Em pesquisa realizada pelo engenheiro elétrico James Blyth naUniversidade de Glasgow, foi desenvolvido um aerogerador de eixo vertical com opropósito de fornecer energia para a residência do próprio pesquisador (JOHNSON,2006).
Em 1888, Charles F. Brush, adaptando o modelo construtivo dos moinhos

ANEXO A. Histórico da energia eólica 82
de vento convencionais, desenvolveu o primeiro aerogerador de eixo horizontal noestado de Ohio, EUA. Esse possuía uma hélice de 17 m de diâmetro que acionavao eixo de um dínamo (QUAGLINO, 2002). Contudo, apesar das grandes dimensões,esse aerogerador produzia no máximo 12 kW de potência elétrica, um valor baixocomparado aos aerogeradores desenvolvidos nos anos seguintes. Devido à baixavelocidade de rotação desempenhada pelas hélices do tipo american wind rose, omodelo utilizava uma caixa de velocidades, alcançando 500 rpm no eixo do geradoratravés da multiplicação em proporção de 1:50. Esses aerogeradores, apesar de teremsido um avanço na geração de energia, não possuíram modelos subsequentes.
Segundo (MATHEW, 2006), a partir de estudos desenvolvidos na Dinamarcainiciados em 1890, foram construídos os primeiros aerogeradores com design destinadoexclusivamente à geração de energia elétrica. O professor Paul LaCour da escola deengenharia de Askov desenvolveu um aerogerador auto regulável de quatro pás quegerava potências de 5 a 25 kW. Durante a Primeira Guerra Mundial cerca de 250turbinas desse modelo operavam por toda a Dinamarca (WAGNER; MATHUR, 2009).
A partir dos conhecimentos tecnológicos desenvolvidos na Primeira GrandeGuerra, dado os estudos aerodinâmicos aplicados nos primeiros aviões de combate, atecnologia de geração eólica deu grandes saltos. Em 1920, Betz concluiu através deseus estudos, que a máxima energia cinética a ser convertida pelos aerogeradores erade 59%. A partir da associação desse conhecimento com as teorias de momento lineare conservação de movimento, foi possível desenvolver regras e padrões aerodinâmicospara a construção das pás de aerogeradores (AKHMATOV, 2003).
Graças aos saltos tecnológicos dessa época, diversos modelos de turbinaseólicas surgiram, como os aerogeradores de capacidade entre 0.2 e 3kW que, por voltade 1925, tornaram-se comercialmente disponíveis no mercado americano e outrosmodelos difundidos por diversos países como França, Rússia, Inglaterra e Dinamarca.Durante esse período diversos novos modelos de aerogeradores foram testados, comoé o caso das turbinas de eixo vertical Darrieus e Savonious, que foram consideradosmodelos inovadores para a época (PATEL, 2006).
Apesar do desenvolvimento eólico ter sido prejudicado durante a SegundaGuerra Mundial, os EUA mantiveram suas pesquisas na área, durante o período. Issopossibilitou o surgimento de novos modelos de maiores dimensões e capacidade degeração. Após a segunda grande guerra, mais conhecimento acerca do comportamentoaerodinâmico das pás foi difundido ao redor do mundo, dessa forma, a tecnologia degeração teve grandes saltos. O mercado eólico recebeu grandes investimentos, até omomento em que os preços das fontes convencionais de geração de energia, como ocarvão mineral e o petróleo, deixaram a geração eólica menos atrativa. Somente coma crise o petróleo ocorrida na década de 70 é que houve novamente investimentos

ANEXO A. Histórico da energia eólica 83
na área, que de maneira geral se mantiveram ao redor do mundo e possibilitaramalcançarmos a tecnologia de geração eólica que possuímos hoje (RAGHEB, 2014).

84
ANEXO B – Aerogeradores e seus componentes
O termo “aerogerador” se refere ao equipamento utilizado atualmente no pro-cesso de geração de energia elétrica a partir do vento. Contudo, outros nomes sãoutilizados na industria, como “geradores eólicos”, “turbinas eólicas” ou “conversoreseólicos”.
Segundo (AMÊNDOLA, 2007), de maneira geral, o funcionamento de um aero-gerador parte do seguinte princípio: o vento movimenta as pás do aerogerador, criandoum torque no eixo do rotor que é enviado ao eixo do gerador elétrico através de umsistema de transmissão. Então, o gerador elétrico por meio de indução eletromagnética,gera energia elétrica que será distribuída à rede. Contudo, existe grande complexidadena construção do sistema como um todo, pois são diversos elementos que compõem aestrutura do aerogerador, bem como sua rede de distribuição, incluindo subestações deenergia. Sendo que, eficiência, segurança e robustez, frente as grandes dimensões em-pregadas atualmente, são fatores cruciais na fabricação de cada um dos elementos quecompõem o sistema eólico. Isso garante alta viabilidade do processo de geração sob oaspecto econômico.
Existem algumas configurações possíveis para um projeto de aerogerador.Essas variam de acordo com aspectos econômicos, tipo de vento disponível, disponibili-dade de espaço, etc. As configurações alteram o projeto em aspectos como número depás presentes no rotor; orientação do rotor em relação a torre; material empregado naconstrução de pás e torres; design e perfil de elementos estruturais como pás, nacelee hub; velocidade do rotor (se fixa ou variável); tipo de controle de velocidade; tipode gerador elétrico empregado; entre várias outras possibilidades de configuração(NELSON, 2009).
As configurações as quais um aerogerador pode ser modulado, permitem suaclassificação em alguns grupos. Por exemplo, com referencia a disposição do eixo daturbina temos aerogeradores de eixo vertical, como é o caso as turbinas Darrieus eSavonious e as turbinas de eixo horizontal. Existem vantagens e desvantagens entreesses dois grupos de aerogeradores. Podemos citar como vantagens da turbina deeixo vertical o fato desta poder aproveitar o vento de todas as direções, não havendo anecessidade de sistemas de controle de posição. Outra vantagem é toda a estruturade transmissão e conversão eletromecânica de energia estar posicionada na base doaerogerador, o que permite fácil manutenção deste tipo de equipamento, reduzindocustos operacionais. Contudo, apesar de diversos estudos serem conduzidos ao redordo mundo para melhoria deste tipo de modelo, as turbinas de eixo horizontal são asmais difundidas na industria de geração eólica devido sua maior eficiência e larga
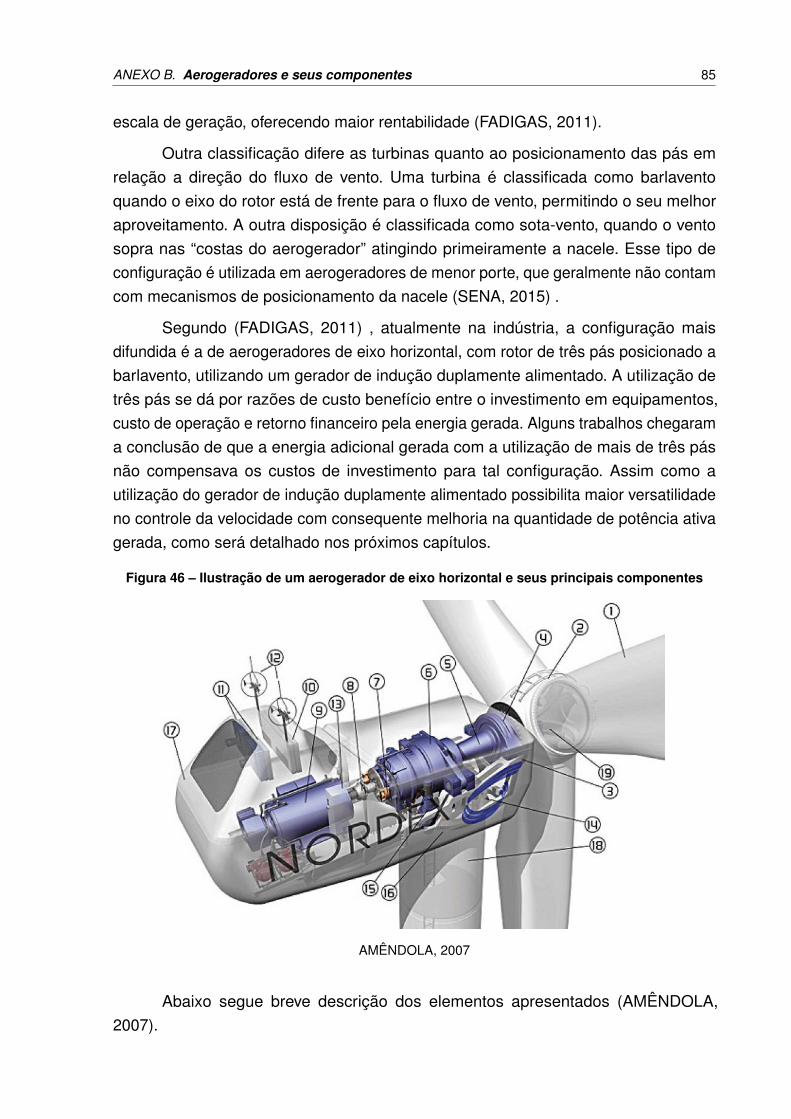
ANEXO B. Aerogeradores e seus componentes 85
escala de geração, oferecendo maior rentabilidade (FADIGAS, 2011).
Outra classificação difere as turbinas quanto ao posicionamento das pás emrelação a direção do fluxo de vento. Uma turbina é classificada como barlaventoquando o eixo do rotor está de frente para o fluxo de vento, permitindo o seu melhoraproveitamento. A outra disposição é classificada como sota-vento, quando o ventosopra nas “costas do aerogerador” atingindo primeiramente a nacele. Esse tipo deconfiguração é utilizada em aerogeradores de menor porte, que geralmente não contamcom mecanismos de posicionamento da nacele (SENA, 2015) .
Segundo (FADIGAS, 2011) , atualmente na indústria, a configuração maisdifundida é a de aerogeradores de eixo horizontal, com rotor de três pás posicionado abarlavento, utilizando um gerador de indução duplamente alimentado. A utilização detrês pás se dá por razões de custo benefício entre o investimento em equipamentos,custo de operação e retorno financeiro pela energia gerada. Alguns trabalhos chegarama conclusão de que a energia adicional gerada com a utilização de mais de três pásnão compensava os custos de investimento para tal configuração. Assim como autilização do gerador de indução duplamente alimentado possibilita maior versatilidadeno controle da velocidade com consequente melhoria na quantidade de potência ativagerada, como será detalhado nos próximos capítulos.
Figura 46 – Ilustração de um aerogerador de eixo horizontal e seus principais componentes
AMÊNDOLA, 2007
Abaixo segue breve descrição dos elementos apresentados (AMÊNDOLA,2007).

ANEXO B. Aerogeradores e seus componentes 86
(1) Pás da turbina: Responsáveis pela captação da energia cinética dos ventos econsequente conversão em conjugado mecânico ao eixo do rotor. Possuem diferentesperfis com diferentes características dinâmicas. Seus projetos têm base em estudosaerodinâmicos realizados em aeronaves, objetivando a maior captação de energia emenor geração de ruídos durante operação. São fabricadas a partir de materiais comofibra de vidro e carbono impregnadas com resina epóxi. Sua fabricação é extremamentecriteriosa, pois tem influência direta na qualidade da energia gerada e nos riscos depossíveis acidentes por falhas estruturais. Para tanto, diversos testes de esforços sãorealizados para assegurar a qualidade e longevidade dos produtos. São os componen-tes de maior dimensão no aerogerador, gerando altos custos logísticos dada a delicadacondição de transporte envolvida.
(2) Cubo da turbina (hub): Peça de acoplamento das pás ao eixo do rotor daturbina. Possui em seu interior os atuadores mecânicos do sistema de controle doângulo de passo. Sua estrutura é fabricada em aço fundido e sua carenagem emligas metálicas especiais. A carenagem possui perfil aerodinâmico de modo a diminuiresforços mecânicos causados pelo vento e suas variações.
(3) Carcaça da nacele: Estrutura que suporta todos os elementos responsáveispela conversão de energia mecânica em elétrica. Fabricada em aço fundido, é capazde suportar os esforços mecânicos e vibrações causadas pelo vento e pelo processode geração de energia. Seu formato difere de acordo com o fabricante e modelo deaerogerador empregado.
(4) Rolamento do eixo da turbina: Rolamento instalado em um mancal quesustenta o eixo do rotor da turbina.
(5) Eixo da turbina: Eixo responsável por transmitir o conjugado da turbina paraa caixa de transmissão. Possui grande diâmetro e opera com alto conjugado motor ebaixa velocidade de rotação.
(6) Caixa de transmissão: Caixa de engrenagens geralmente tipo planetáriaque multiplica a baixa velocidade de rotação do eixo da turbina, transmitindo uma altavelocidade de rotação para o eixo do gerador elétrico. Existem aerogeradores quenão possuem caixa de transmissão, sendo que o eixo do rotor da turbina é acopladodiretamente ao eixo do gerador elétrico que acaba operando em baixas velocidades derotação. Contudo, essa configuração exige que o gerador empregado possua grandequantidade de pares de polos, o que confere ao aerogerador um diâmetro muito grande,aumentando o volume da nacele.
(7) Freio do eixo do gerador: Freio mecânico a disco. É instalado no eixo desaída da caixa de transmissão. Trata-se de um recurso de segurança acionado emcasos de manutenção e emergência quando a segurança do equipamento é colocada

ANEXO B. Aerogeradores e seus componentes 87
em risco.
(8) Acoplamento entre transmissão e gerador: Acoplamento flexível entre oeixo da caixa de transmissão e do gerador. Essa conexão evita tensões e vibraçõesmecânicas prejudiciais.
(9) Gerador: Equipamento responsável pela conversão do conjugado mecânicooriundo do eixo da turbina em energia elétrica. Pode ser de vários tipos e estar co-nectado no sistema através de variadas configurações. Este equipamento e algumasconfigurações possíveis serão abordados com mais detalhes nos capítulos a seguir.
(10) Radiador de calor da transmissão: Equipamento responsável pela refrigera-ção da caixa de transmissão.
(11) Radiador de calor do Gerador: Equipamento responsável pela refrigeraçãodo gerador elétrico.
(12) Sensores de direção e velocidade do vento: Esses elementos provêminformações que serão utilizadas pelo sistema de controle para a manutenção dosestados de operação do aerogerador.
(13) Sistema de controle: Sistema responsável por monitorar os parâmetrosfornecidos pelos sensores dispostos no aerogerador, e a partir dos dados transmitidos,controlar o aerogerador automaticamente objetivando o melhor rendimento possível nageração de potência ativa.
(14) Sistema hidráulico: Responsável por controlar a pressão do óleo utilizadonos sistemas de posicionamento da nacele e acionamento dos freios.
(15) Sistema de controle para posicionamento da nacele: O sistema de posi-cionamento permite a rotação da nacele no sentido longitudinal em relação a torre.Isso permite que o aerogerador esteja a maior parte do tempo voltado para a direçãodo vento mais forte possibilitando uma geração mais eficaz de energia. O sistemabasicamente consiste em sensores de posição da nacele e sensores de direção dovento. Através da comparação dos dados obtidos pelos sensores, um sinal de atuaçãoé enviado aos motores acoplados às cremalheiras de posicionamento, que realizarão amovimentação da nacele.
(16) Cremalheira de posicionamento da nacele: Parte mecânica do sistema deposicionamento. Através das cremalheiras instaladas entre a nacele e a torre e motoresacoplados à engrenagens, a rotação da nacele ocorre, conforme os sinais enviadospelos sensores de posição.
(17) Carenagem da nacele: Fabricada em metais de liga especial, são responsá-veis pela proteção dos elementos presentes dentro da nacele. Proporcionam tambémum efeito aerodinâmico imprescindível na otimização dos ventos em sites eólicos, pois

ANEXO B. Aerogeradores e seus componentes 88
uma turbina pode influenciar a captação de vento de uma turbina vizinha. Esse efeito éconhecido como sombra eólica.
(18) Torre: Fabricada em diversos tamanhos de acordo com a configuraçãodo aerogerador projetado, geralmente possui tamanho tubular ligeiramente cônico. Éfabricada em aço ou concreto e sustenta todos os esforços causados pela nacele e osmais variados regimes de ventos. O efeito alavanca causado pela força que o ventoaplica sobre as pás além da estabilidade que o funcionamento do processo de geraçãorequer, exige uma fundação extremamente firme e confiável. Essa é construída comconcreto e armações de aço e conta com condutores de aterramento para proteçãocontra raios.
(19) Sistema de controle do ângulo de passo: A partir de parâmetros comopotência ativa gerada e velocidade de rotação do eixo do gerador esse sistema decontrole regula o angulo das pás no sentido longitudinal. Dessa forma, é possível alterara velocidade de rotação da turbina, limitando a extração de potência e protegendo oselementos mecânicos do aerogerador de possíveis sobrecargas.





























