Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL RE I PRÓ‐REITORIA DE PESQUISA E PÓS‐GRADUAÇÃO
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS D IRETORIA DE PESQUISA E PÓS‐GRADUAÇÃO
PROGRAMADE PÓS ‐GRADUAÇÃO EMENGENHARIA ELÉTRICA
MaisaLailadeFátimaOliveira
ESTUDO DE ATERRAMENTOS ELÉTRICOS EM BAIXAS FREQUÊNCIAS UTILIZANDO O
MÉTODO SEM MALHA
BeloHorizonte
2016

UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL RE I PRÓ‐REITORIA DE PESQUISA E PÓS‐GRADUAÇÃO
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS D IRETORIA DE PESQUISA E PÓS‐GRADUAÇÃO
PROGRAMADE PÓS ‐GRADUAÇÃO EMENGENHARIA ELÉTRICA
MaisaLailadeFátimaOliveira
ESTUDO DE ATERRAMENTOS ELÉTRICOS EM BAIXAS FREQUÊNCIAS UTILIZANDO O
MÉTODO SEM MALHA
Dissertação submetida à banca examinadora
designada pelo Programa de Pós‐Graduação em
EngenhariaElétrica‐ASSOCIAÇÃOAMPLAENTRE
AUFSJEOCEFET‐MG,comopartedosrequisitos
necessários à obtenção do grau de Mestre em
EngenhariaElétrica.
ÁreadeConcentração:SistemasElétricos
LinhadePesquisa:EletromagnetismoAplicado
Orientadora:Profa.Dra.ÚrsuladoCarmoResende
Coorientador:Prof.Dr.RafaelSilvaAlípio
BeloHorizonte
2016

Elaboração da ficha catalográfica pela Biblioteca-Campus II / CEFET-MG
Oliveira, Maisa Laila de Fátima048e Estudo de aterramentos elétricos em baixas frequências utilizando o
método sem malha / Maisa Laila de Fátima Oliveira – 2016.xii, 79 f.: il., gráfs, tabs..
Dissertação de mestrado apresentada ao Programa de Pós-Graduação em Engenharia Elétrica em associação ampla entre a UFSJ e o CEFET-MG.
Orientadora: Úrsula do Carmo Resende.Coorientador: Rafael Silva Alípio.Banca examinadora: Úrsula do Carmo Resende, Rafael Silva Alípio,
Fernando Henrique Silveira, Ramon Dornelas Soares. Dissertação (mestrado) – Centro Federal de Educação Tecnológica de
Minas Gerais.
1. Linhas elétricas subterrâneas – Teses. 2. Métodos de Galerkin – Teses. 3. Interpolação – Teses. 4. Métodos sem malha (Análise numérica) –Teses. 5. Mínimos quadrados – Teses. I. Resende, Úrsula do Carmo. II. Alípio, Rafael Silva. III. Centro Federal de Educação Tecnológica de Minas Gerais. IV. Universidade Federal de São João del-Rei. V. Título.
CDD 621.31923

Dedicoestetrabalhoaosmeuspaise
aminhairmã,portodooamore
confiança.
AoLucas,pelocompanheirismoe
paciência.

ii
Agradecimentos
AgradeçoprimeiramenteaDeusporpermitiroalcancedemaisumêxitoemminha
vida.
AosmeuspaisJoséeSimone,porseremexemplodeforça,sabedoriaecoragem.Por
transmitirem valores importantes como humildade, união e perseverança. Por me
apoiarem nos momentos mais difíceis e se alegrarem com cada conquista. Agradeço
principalmentepeloamorecarinhoincondicional.
AgradeçoàminhaqueridairmãMarie,pelaamizadeecumplicidade,porpermitir
partilharminhasalegriasemeusanseios.Por tornaraminhacaminhadabemmais leve
atravésdosseusconselhos.
Aomeugrandeamor,Lucas,pelasinúmeraspalavrasdeapoioeincentivoquenão
medeixaramdesistirdeste sonho.Agradeçopelocompanheirismo,pelaconfiançaepela
grandesensibilidadeemmeajudarcomasuacompreensão,reconhecendoaimportância
desta vitória em nossas vidas. Obrigada por ser um grande exemplo de paciência e
dedicação.
Agradeço à Profa. Úrsula do Carmo Resende pelo incentivo ao longo daminha
carreiraacadêmica,portransmitir‐mepartedeseuvaliosoconhecimentoemefortalecer
duranteessacaminhada.Muitoobrigadapelaspalavrassábiasdurantetodaaorientação.
Gostaria de expressarmeus sinceros agradecimentos aoProf.Rafael SilvaAlípio,
meu coorientador, pela sua paciência e disposição em me ajudar, pelos valiosos
ensinamentosepelasgrandescontribuiçõesnotrabalho.
À NSA Consultoria e Informática Ltda., em especial ao Eng.º Elilson Eustáquio
Ribeiropelasvaliosasdiscussões,porserumagrandefontedeinspiraçãoparatodos.
Por fim,agradeçoatodosquenão foramcitados,masquecontribuíramde forma
diretaouindiretamenteparaessaconquista.

iii
Resumo
Estetrabalhoapresentaumacontribuiçãoaoestudodossistemasdeaterramento
em baixas frequências utilizando uma técnica sem malha para a solução da equação
diferencial parcial associada ao problema. O modelo eletromagnético do sistema de
aterramento édesenvolvido apartir das equaçõesdeMaxwell parauma configuração
composta por uma haste vertical. O método sem malha utilizado é o Element‐Free
GalerkinMethodbaseadonoMétododosMínimosQuadradosMóveisInterpolantes.São
propostas duas metodologias para representar a estrutura física da haste de
aterramentoaomodelocomputacional.Aprimeiradelasconsideraumadistribuiçãode
nósrepresentandoasuperfíciedahasteeasegunda,consideraahasterepresentadapor
ummodelofilamentarjuntamentecomoajustedotamanhododomíniodeinfluênciada
função de forma dos nós ao longo da haste. Para a implementação do modelo
eletromagnético foi desenvolvida uma ferramenta computacional utilizando‐se o
ambiente MATLAB. Os resultados de potenciais no solo e resistência de aterramento
para a haste inserida em solo homogêneo, bem como, em solo estratificado em duas
camadas, foramcomparadoscomvaloresobtidosapartirdaaplicaçãodoMétododos
Momentos,demonstrandoavalidadeeaprecisãodatécnicadesenvolvida.
PalavrasChaves:Aterramentoelétrico,IEFGM,MétodosemMalha,MLS.

iv
Abstract
This work presents a contribution to the study of grounding systems at low
frequenciesusingameshlessmethod for the solutionof thepartialdifferentialequation
associated to the problem. The electromagnetic model of the grounding system is
developedfromtheMaxwellequationsforaconfigurationconsistingofaverticalrod.The
meshlessmethod used is the Element‐Free GalerkinMethod based on the Interpolating
MovingLeastSquaresMethod.Twomethodologiesareproposedtorepresentthephysical
structure of the grounding rod into the computationalmodel.The first one considers a
distributionofnodesrepresentingthesurfaceoftherodandthesecondconsiderstherod
representedbyafilamentmodel,alongwiththeadjustmentoftheinfluencedomainsizeof
thenodes shape function along the rod. For the implementation of the electromagnetic
model,acomputationaltoolwasdevelopedusingtheMATLABenvironment.Theresultsof
thepotentialsonthesoilsurfaceandthegroundresistancefortherodinsertedinuniform
soil,aswellasinstratifiedtwo‐layersoilmodel,werecomparedwithvaluesobtainedfrom
theapplicationoftheMethodofMoments,demonstratingthevalidityandprecisionofthe
developedtechnique.
Keywords:Groundingsystem,IEFGM,MeshlessMethod,MLS.
v
Sumário
Resumo...............................................................................................................................................iii
Abstract...............................................................................................................................................iv
Sumário................................................................................................................................................v
ListadeFiguras..............................................................................................................................vii
ListadeTabelas................................................................................................................................ix
ListadeAbreviaturas......................................................................................................................x
Capítulo1............................................................................................................................................1
Introdução..........................................................................................................................................1
1.1.RelevânciadoTema..............................................................................................................................1
1.2.ContextualizaçãodoTrabalho..........................................................................................................3
1.3.Objetivos....................................................................................................................................................4
1.4.Metodologia..............................................................................................................................................4
1.5.OrganizaçãodoTexto...........................................................................................................................5
Capítulo2............................................................................................................................................6
AterramentosElétricosemBaixasFrequências...................................................................6
2.1.Introdução.................................................................................................................................................6
2.2. Aspectos Básicos do Comportamento dos Sistemas de Aterramento em Baixas
Frequências.......................................................................................................................................................7
2.3.ModelagemdoSolo............................................................................................................................10
2.4.FunçõesBásicasdoAterramento.................................................................................................11
2.5.ArranjosTípicosdeAterramento................................................................................................14
2.6.ModeloMatemático............................................................................................................................15
2.6.2.1.MétodosNuméricosIntegrais.....................................................................................................16
2.6.2.2.MétodosNuméricosDiferenciais...............................................................................................18
2.7.ConsideraçõesFinais.........................................................................................................................22
Capítulo3.........................................................................................................................................23
MétodossemMalha......................................................................................................................23
3.1.Introdução..............................................................................................................................................23

vi
3.2.Conceitosbásicos................................................................................................................................23
3.3.OMétodoElement‐FreeGalerkin(EFGM)...............................................................................25
3.3.2.MétododeGalerkin..................................................................................................................................28
3.4.ModelagemMatemáticadoEFGM...............................................................................................30
3.5.IntegraçãoNumérica.........................................................................................................................35
3.6.CritériodeVisibilidade.....................................................................................................................36
3.7.ConsideraçõesFinais.........................................................................................................................36
Capítulo4.........................................................................................................................................38
Resultados........................................................................................................................................38
4.1.Introdução..............................................................................................................................................38
4.2.AplicaçãodoMétodoIEFGMaoSistemadeAterramentoElétrico...............................38
4.2.1.DescriçãodoSistemadeAterramentoElétrico............................................................................38
4.2.2.ParâmetrosdoIEFGM.............................................................................................................................39
4.3.CálculodoErro.....................................................................................................................................41
4.4.ModelagemdoRaiodaHastedeAterramento.......................................................................42
4.5.SistemasdeAterramentoUtilizandoHastesVerticais.......................................................44
4.6.AvaliaçãodoDomínioComputacionaldoProblema...........................................................45
4.6.1.PotencialnaFronteiraΓd......................................................................................................................46
4.7.CálculodaResistênciadeAterramento.....................................................................................51
4.8.AvaliaçãodaDistribuiçãonãoUniformedeNós...................................................................54
4.9.PropostadeRepresentaçãodeHastesConvencionais.......................................................57
4.10.EstudodeCasoSoloHomogêneo..............................................................................................60
4.11.EstudodeCasoSoloHeterogêneo.............................................................................................63
4.12.ConsideraçõesFinais......................................................................................................................67
Capítulo5.........................................................................................................................................69
Conclusões.......................................................................................................................................69
5.1.Introdução..............................................................................................................................................69
5.2.PrincipaisContribuições..................................................................................................................71
5.3.PropostasdeContinuidade.............................................................................................................72
ReferênciasBibliográficas.........................................................................................................73
vii
ListadeFiguras
Figura2‐1‐Circuitoequivalentedeumapequenapartedoaterramentoelétrico–adaptadade[16].............7
Figura 2‐2‐ Simplificação do circuito equivalente de uma pequena parte do aterramento elétrico para
solicitaçõesdefenômenosdebaixafrequência...............................................................................................................8
Figura2‐3‐Soloestratificadoemduascamadashorizontaisderesistividadesdistintas.....................................11
Figura2‐4‐Representaçãodatensãodepasso–adaptadade[16]................................................................................12
Figura2‐5‐Representaçãodatensãodetoque–adaptadade[16]................................................................................13
Figura2‐6‐Representaçãodatensãodetransferência–adaptadade[16]................................................................13
Figura2‐7‐Sistemadeaterramentoconstituídodeumahastedeaterramentoinseridaverticalmenteem
solohomogêneo..........................................................................................................................................................................19
Figura2‐8‐Simplificaçãodoproblemadeaterramento......................................................................................................21
Figura3‐1‐Distribuiçãodenósespalhadossobreumdomínio2D................................................................................24
Figura3‐2‐Domíniosdeinfluênciacircularesdistribuídosportodoodomíniodoproblema..........................25
Figura3‐3‐DomíniodesuporteΩxqdeumpontoxq...........................................................................................................28
Figura3‐4‐ComparaçãoentreasfunçõesjanelautilizadasnoMLSenoIMLS.........................................................35
Figura3‐5‐Demonstraçãodo critério de visibilidade. (a) situaçãoanterior à aplicaçãodo critério e (b)
apósàaplicaçãodocritério...................................................................................................................................................36
Figura4‐1‐Sistemadeaterramentocompostoporumahastevertical........................................................................39
Figura4‐2‐Exemplodedistribuiçãodosnósnodomíniodoproblema.......................................................................40
Figura4‐3‐Exemplodedistribuiçãodospontosdeintegraçãonodomíniodoproblema...................................41
Figura 4‐4‐ Exemplo de distribuição dos nós. (a) Proposta Raio Real (PRR) e (b) Proposta Raio
Equivalente(PRE)......................................................................................................................................................................44
Figura4‐5‐PotenciaisnoníveldosolocalculadoapartirdoIEFGMedoMoM.......................................................45
Figura4‐6‐Erropercentualparaopotencialelétricoaoníveldosoloemfunçãodadistância........................48
Figura4‐7‐Curvasdeequipotenciaisnosoloespaçadasde0,01Vparaahasteencapsuladacomraio0,1
m........................................................................................................................................................................................................49
Figura4‐8‐PotencialaoníveldosolocalculadoapartirdoIEFGMedoMoM.Aproximaçãodopotencial
elétricoemΓd..............................................................................................................................................................................50
Figura 4‐9‐ Processo de busca da equipotencial para o cálculo do campo elétrico . (a) equipotencial
próximaaoaterramentoe(b)equipotencialafastadadoaterramento............................................................53
Figura4‐10‐Distribuiçãonãouniformedenós.......................................................................................................................55
Figura4‐11‐Potenciaisaoníveldosolo......................................................................................................................................61
Figura4‐12‐Distribuiçãodepotenciaisnosolo......................................................................................................................62
Figura4‐13‐Curvasdeequipotenciaisnosoloespaçadasde20V.................................................................................62

viii
Figura4‐14‐Distribuiçãodecampoelétriconosolo.............................................................................................................63
Figura4‐15‐Sistemadeaterramentocompostoporumahasteinseridoemumsoloestratificadoemduas
camadas..........................................................................................................................................................................................64
Figura4‐16‐Potenciaisaoníveldosolo......................................................................................................................................65
Figura4‐17‐Curvasdeequipotenciaisnosoloespaçadasde15V.................................................................................66
Figura4‐18‐EquipotencialparaocálculodacorrenteIparaocasodesoloheterogêneo..................................67

ix
ListadeTabelas
Tabela4‐1–PotencialemΓd............................................................................................................................................................50
Tabela4‐2– e paraopotencialaoníveldosolo–aproximaçãodopotencialelétricoemΓd.51
Tabela4‐3–Resultados–Distribuiçãouniformedenós....................................................................................................54
Tabela4‐4–Resultados–Distribuiçãonãouniformedenósparaahastecomrh 0,05m...........................56
Tabela4‐5–Resultados–Distribuiçãonãouniformedenósparaoutrasconfiguraçõesdeaterramento...56
Tabela4‐6–ResultadosIEFGM–PREparaashastesconvencionais............................................................................59
Tabela4‐7–ResultadosIEFGM–PREparaashastesencapsuladas..............................................................................59
Tabela4‐8–ResultadosIEFGM–Casoreal...............................................................................................................................61
Tabela4‐9–ResultadosIEFGM–Casosoloheterogêneo...................................................................................................66
x
ListadeAbreviaturas
AP AproximaçãoProposta
CEFET CentroFederaldeEducaçãoTecnológicadeMinasGerais
CEMIG CompanhiaEnergéticadeMinasGerais
DEM DiffuseElementMethod–MétododosElementosDifusos
EDP EquaçãoDiferencialParcial
EFGM ElementFree‐GalerkinMethod–MétododeGalerkinsemElemento
FEM FiniteElementMethod–MétododosElementosFinitos
FPM FinitePointMethod–MétododePontoFinito
GEA GrupodeEletromagnetismoAplicado
GPR Groundingpotentialrise–Elevaçãodepotencialdosistemadeaterramento
IEFGM Interpolating Element‐Free Galerkin Method – Método dos Elementos Livres de
GalerkinInterpolantes
IMLS InterpolatingMovingLeastSquares–MínimosQuadradosMóveisInterpolantes
LT LinhadeTransmissão
MATLAB MatrixLaboratory
MLPG MeshlessLocalPetrov‐Galerkin‐MétodoLocaldePetrov‐GalerkinsemMalha
MLS MovingLeastSquares–MínimosQuadradosMóveis
MM MeshlessMethods–MétodossemMalha
MoM MethodofMoments–MétododosMomentos
NBR NormaBrasileira
NN Númerodenós
NPI Númerodepontosdeintegração
PRE PropostaRaioEquivalente
PRR PropostaRaioReal
PVC ProblemasdeValordeContorno
RGN Relaçãoentreonúmerodepontosdeintegraçãoeonúmerodenósnosmétodossem
malha
RKPM ReproducingKernelParticleMethod–MétododePartículacomNúcleoReproduzido
SPH Smoothed Particle Hydrodynamics Method ‐ Método Partícula Hidrodinâmica
Suavizada
UFSJ UniversidadeFederaldeSãoJoãoDelRei

xi
ListadeSímbolos
Basepolinomialcompleta
Campoelétrico
x CoeficientedesconhecidodonóI
x Coeficientesdesconhecidosequedependemdaposiçãodex
VI Coeficientesindeterminados
L Comprimentodahastedeaterramento
σ Condutividadeelétrica
Constanteescalarparaodomíniodeinfluência
r, ϕ, z Coordenadasdosistemacilíndrico
I Correnteelétrica
Densidadedecorrenteelétrica
Distânciaentreosnós
Domíniodoproblema
Domíniodeinfluênciadafunçãojanela
Ω Domíniodoproblema
Ω Domíniofechado
Erromédio
Erromáximo
Errorelativo
Erroresidual
Ω Espaçodefunçõeslinearesdedimensãoinfinita
Ω Espaçodedimensãofinita
Fatordeproporcionalidadeparaotamanhodaregião1paraadistribuiçãodenósnão
uniforme
Fator de proporcionalidade para o espaçamento dos nós na região 2 para a
distribuiçãodenósnãouniforme
Frequênciaangular
Γ FronteiradeNeumann
Γ FronteiradeDirichlet
Γ Fronteiradodomíniodoproblema Γ ∪ Γ
Φ Funçãodeforma
FunçãoJanela
V FunçãoLocal

xii
Funçãodeponderação
Γ Interfaceentremeioshomogêneos
MatrizdoscoeficientesdoIEFGM
M Númerodenósenvolvidosnaaproximação
Númerodetermosdabasepolinomial
Númerodepontosondeasoluçãoéavaliada
N Númerototaldenós
Permissividadeelétrica
V Potencialescalarelétrico
V Potencialelétricodahastedeaterramento
R Raiododomíniodoproblema
r Raiodahastedeaterramento
ρ Resistividadeelétrica
R Resistênciaelétrica
SoluçãoobtidaapartirdoMoM
SoluçãoobtidaapartirdoIEFGM
VetornormalàΓ

1
Capítulo1
Introdução
1.1. RelevânciadoTema
O aterramento elétrico é um elemento de fundamental importância para os
sistemas elétricos, sendo esse, uma ligação intencional a terra com o objetivo de
dispersar as correntes de falta para o solo, semprovocar diferenças de potenciais ou
tensõesinduzidasperigosasparaosseresvivosouquepossamdanificarequipamentos
deinstalaçõeslocalizadasnasproximidades[1].
Os sistemas de aterramento são projetados, na maioria das situações, para
atender a solicitações lentas como, por exemplo, aquelas associadas às correntes de
curto‐circuito. Por isso, é importante analisar o comportamento do aterramento em
baixafrequência.Essaanálisepodeserrealizadaapartirdaresistênciadeaterramentoe
da distribuição de potenciais no solo, que são parâmetros típicos de projetos de
aterramento.
A obtenção desses parâmetros está diretamente relacionada com omodelo do
solo em que os eletrodos estão inseridos, expresso por suas características
eletromagnéticasesuaestratificaçãoemcamadas.Poressarazão,acorretamodelagem
dosoloéumfatorfundamentalemestudosdeaterramento.
Asprimeirassoluçõespropostasparaaobtençãodosparâmetrosresistênciade
aterramento e distribuição de potenciais basearam‐se em técnicas analíticas [2],
permitindoasoluçãoapenasparaconfiguraçõesdeaterramentomaissimples.
Entretanto,comoaumentodacapacidadedeprocessamento, foipossível tratar
problemas de aterramento mais complexos por meio de métodos numéricos
computacionais, capazesdeobtersoluçõescomumgraumaiordeexatidão.Dentreos
métodos computacionais mais utilizados para a solução das equações associadas a
problemasdeaterramentodestacam‐seoMétododosElementosFinitos(FiniteElement
Method–FEM)[3],oMétododosMomentos(MethodofMoments–MoM)[4]eoModelo

2
EletromagnéticoHibrido(HybridElectromagneticModel–HEM)[5].Oprimeirodelesfaz
parte de uma categoria demétodos denominada demétodos diferenciais, enquanto o
MoMeoHEMfazempartedacategoriademétodos integrais.Osmétodosdiferenciais
tem como vantagens a capacidade de tratar naturalmente osmeios heterogêneos e a
geraçãodeumsistemamatricialesparso.Comodesvantagem,destaca‐senecessidadeda
delimitaçãododomínioparaproblemasabertos.Alémdisso,dependendodadimensão
do arranjo de aterramento analisado, a modelagem do domínio do problema pode
implicar alto custo computacional, uma vez que o método requer a geração de uma
malha. Os métodos integrais, por sua vez, são bastante apropriados para análises de
problemas de aterramento por tratarem de forma natural problemas a fronteiras
abertas. Porém, apresentam dificuldade em considerarmeios heterogêneos, como é o
casodesolosreaisemqueoseletrodossãoinseridos.
Em razão dessas limitações, nas últimas décadas foi desenvolvida uma nova
classedemétodosparasoluçãodeEquaçõesDiferenciaisParciais(EDP).Essesmétodos
sãoconhecidoscomoMétodossemMalha(MeshlessMethods–MM)pornãorequerema
utilizaçãodeumamalha[6].Oprincipalobjetivodestetipodeabordageméeliminara
estruturadamalhaeaproximarasoluçãousandoapenasumanuvemdenósespalhados
por toda a região de interesse. Esses nós não estão conectados entre si e não há
nenhumarelaçãopré‐definidaentreeles.Essacaracterística tornaosMMapropriados
paralidarcomgeometriascomplexasecomnão‐homogeneidades.
Entre os MM disponíveis na literatura, o Método de Galerkin sem Elemento
(Element‐Free Galerkin Method – EFGM) [7] é um dos mais investigados, pois é
extremamente robusto, tem boa taxa de convergência e, embora exija o uso de uma
célula de fundo para realizar a integração numérica, o processo de integração não
depende da distribuição de nós. O EFGM acopla o Método dos Mínimos Quadrados
Móveis(MovingLeastSquares–MLS)comaformafracadeGalerkin.Entretanto,oMLS
fornece funções de forma que não satisfazem a propriedade do delta de Kronecker,
assim, são necessárias técnicas adicionais para impor as condições de contorno
essenciais e para tratar as descontinuidades de materiais devido à propriedade não
interpoladoradaaproximação.Parasuperaressarestrição,pode‐seutilizarumafunção
depeso singularnoprocessode construçãoda funçãode forma.Esteprocedimento é
conhecido comoMétodo dos Mínimos Quadrados Móveis Interpolantes (Interpolating
MovingLeast Squares – IMLS). O EFGM utilizando o IMLS é chamado de Método de

3
Galerkin sem Elemento Interpolante (Interpolating Element‐Free Galerkin Method –
IEFGM).
Assim, tendo em vista as vantagens dos MM aqui descritas, tais como, serem
apropriadosparalidarcomgeometriascomplexasecomnão‐homogeneidades,alémda
eficiênciadoIEFGMparatratardiferentestiposdeproblemasenvolvendoEDP[8]‐[14],
neste trabalho é apresentada uma nova aplicação para o IEFGM, que corresponde à
soluçãodeproblemasdeaterramentoelétricoembaixas frequências.Essaaplicaçãoé
inovadora por se tratar de uma abordagem ainda não explorada pelos métodos sem
malha e, portanto, desafiadora no sentido de buscar uma forma de tornar o método
eficienteparaessetipodeproblema.
1.2. ContextualizaçãodoTrabalho
OGrupodeEletromagnetismoAplicado(GEA)doCEFET‐MGtemcomoobjetivo
principal,a investigaçãoeaaplicaçãodemétodosnuméricosvoltadosparaaobtenção
de novas formas de soluções para problemas de eletromagnetismo e projeto de
equipamentos eletromagnéticos. Dentre as principais técnicas investigadas pelo GEA
destacam‐se:MétododosElementosFinitos,MétododasDiferençasFinitasnoDomínio
do Tempo, Métodos dos Momentos e Métodos sem Malha. Este último, é objeto de
estudo desta dissertação, que pretende dar continuidade aos desenvolvimentos
realizados pelo grupo, aplicando o método de forma inédita em problemas de
aterramento.Algunsdos trabalhosdesenvolvidospeloGEAqueutilizaramosmétodos
semmalhasão:
Análise paramétrica do método sem malha Element‐Free Galerkin em
problemaseletrostáticos[9].
Técnicasdecomputaçãoparalelaaplicadasemmétodossemmalha[15].
MétodosemmalhasEFGaplicadoaumespalhamentoeletromagnéticopor
umcilindrodielétricoinfinito[12].
AnalysisofElement‐FreeGalerkin interlopingmoving least squaremethod
inanelectrostaticproblem[11].
AmeshlessapproachusingEFGinterpolatingmovingleast‐squaresmethod
in2‐delectromagneticscatteringanalysis[10].

4
Desenvolvimento dométodo híbrido IEFGM‐MoM aplicado à solução do
espalhamentoeletromagnéticoemduasdimensões[14].
Otimização do método meshless – EFG aplicado a problemas de
espalhamento eletromagnético utilizando algoritmo de evolução
diferencial[13].
1.3. Objetivos
O objetivo principal deste trabalho consiste na modelagem, em baixas
frequências,dosistemadeaterramentocompostoporumahaste inseridaemumsolo
comcaracterísticashomogêneasutilizandooMétodosemMalhaIEFGM.Comoobjetivos
específicospode‐sedestacar:
Desenvolvimento do ferramental teórico, analítico e numérico sobre o
IEFGM;
Estabelecimento de uma modelagem matemática do sistema de
aterramento compostoporumahaste, quando solicitadopor fenômenos
debaixasfrequências;
Desenvolvimento de um código computacional para a modelagem do
sistemadeaterramentoapartirdométodosemmalhaIEFGM;
Desenvolvimentodetécnicasparaconsideraroefeitodoraiodahastede
aterramentoutilizandooIEFGM;
Validação da ferramenta computacional implementada por meio de
comparaçõesdosresultadosobtidoscomaquelesgeradospeloMoM;
VerificaçãodaviabilidadedaaplicaçãodoIEFGMparaaanálisedosistema
deaterramentoinseridoemsolosheterogêneos.
1.4. Metodologia
É desenvolvida uma modelagem matemática, em baixas frequências, para
sistemasdeaterramentoelétricobaseadanasoluçãodiretadasequaçõesdeMaxwell.A
partir dessa formulação é elaborada uma ferramenta computacional em ambiente
5
MATLABcomaimplementaçãodomodeloeletromagnéticodesenvolvido.Asoluçãodo
problemaéentãoobtidaapartirdautilizaçãodatécnicasemmalhaIEFGM.
A ferramenta computacional elaborada é aplicada a sistemas de aterramento
compostoporhastesverticais.Sãoapresentadaspropostasparaarepresentaçãodoraio
da haste de aterramento utilizando‐se o IEFGM e assim são avaliados os principais
parâmetros de projetos de aterramento, tais como a resistência de aterramento e a
distribuição de potenciais no nível do solo considerando a haste cravada em solo
uniforme.OsresultadosobtidossãocomparadoscomaquelesgeradosapartirdoMoM.
Para a análisedo comportamentodehastesde aterramento inseridas emsolos
heterogêneos a partir do IEFGM é apresentado um caso considerando um solo
estratificadoemduascamadashorizontais.Sãoavaliadosospotenciaisdesenvolvidosna
superfíciedosolonaregiãodosistemadeaterramento.
1.5. OrganizaçãodoTexto
O presente texto está organizado em cinco capítulos, incluindo este capítulo
introdutório.
No Capítulo 2 são apresentados os aspectos básicos relacionados ao
comportamentodesistemasdeaterramentoembaixasfrequências.Umbreveestudodo
estado da arte sobre a modelagem matemática de aterramentos elétricos também é
apresentadonestecapítulo.
No Capítulo 3 é feita uma breve introdução sobre a técnica sem malha. É
apresentada amodelagemmatemática do IEFGMdescrevendo os aspectos dométodo
aplicadoaoproblemadeaterramento.
NoCapítulo4o IEFGMéaplicadoaoproblemadeaterramento constituídopor
umahasteinseridaemumsolohomogêneo.Osresultadosobtidossãocomparadoscom
aquelesgeradosapartirdoMoM.Nessecapítulotambéméfeitaumaanálise,paraum
caso,considerandoumsoloestratificadoemduascamadashorizontais.
No Capítulo 5 são apresentadas as conclusões, ressaltando as principais
contribuições,asdificuldadesencontradaseapresentandoaspropostasdecontinuidade
dotrabalho.

6
Capítulo2
AterramentosElétricosemBaixasFrequências
2.1. Introdução
O tema aterramentos elétricos têm despertado o interesse de muitos
pesquisadoresaolongodosanos.Issosejustificapelaimportânciadesseelementopara
ossistemasdepotência,tantodopontodevistadedesempenhodosistemaquantoda
segurança de seres vivos. Um sistema de aterramento é composto basicamente pelas
conexõeselétricasqueligamosistemaaseraterradoaoseletrodos,peloseletrodosde
aterramentopropriamenteditosepelaterraqueenvolvetaiseletrodos[16].
Oseletrodossãocondutoresmetálicosenterradosnosoloacertaprofundidade.
Sua forma bem como sua disposição geométrica no solo, dá origem às diversas
configurações de sistemas de aterramento. Dentre as configuraçõesmais usuais e de
aplicaçãoprática,destacam‐seashastesdispostasverticalmente,oscaboscontrapesose
asmalhasdeaterramento,ambosdispostoshorizontalmentenosolo.
Paraaavaliaçãodocomportamentodoaterramentofrenteasolicitaçõeselétricas
é importantemodelar omeio em que os eletrodos estão inseridos, ou seja, o solo. A
correta determinação de parâmetros típicos de projeto, tais como resistência de
aterramento e distribuição de potenciais, depende diretamente do modelo de solo
empregado,expressoporsuascaracterísticaseletromagnéticasesuaestratificaçãoem
camadas.
Namaioriadassituaçõesdeprojeto,oaterramentoédimensionadoparaatender
a solicitações lentas como, por exemplo, aquelas associadas às correntes de curto‐
circuito. Nesse sentido, é pertinente analisar o comportamento do aterramento nas
condições particulares de baixa frequência, bem como detalhar alguns conceitos
importantesnessafaixadoespectro.Esteéoobjetivoprincipaldestecapítulo,alémde
apresentar um breve estudo do estado da arte sobre a modelagem matemática de

7
aterramentos elétricos. Ressalta‐se que as informações contidas neste capítulo são
baseadasnareferência[16].
2.2. AspectosBásicosdoComportamentodosSistemasdeAterramentoemBaixasFrequências
Osaterramentos, emgeral, sãomodelados considerando‐seos efeitos resistivo,
indutivo e capacitivo, cada qual influenciando de forma específica a condução de
correnteparaaterra.Essesefeitoscaracterizamaimpedânciadeaterramento,queéum
parâmetroimportanteparaacompreensãodanaturezadosistemadeaterramento.
Aimpedânciadeaterramentopodeserentendidacomoaoposiçãooferecidapelo
aterramentoàdispersãodacorrenteelétricaparao solo.Comoobjetivode ilustraro
conceito de impedância de aterramento, na Figura 2‐1 é apresentado um circuito
elétricoequivalentesimplificadoquerepresentaumapequenapartedeumeletrodode
aterramentoenterradonosolo.Esseelementorepresentativodeumapartedoeletrodo
possui duas fontes de corrente distintas associadas: uma transversal,I , que é
dispersada para o solo e uma longitudinal,I , que é transferida para o restante do
eletrodo.
Figura2‐1‐Circuitoequivalentedeumapequenapartedoaterramentoelétrico–adaptadade[16].
A corrente transversal está associada à dispersão de correntes condutivas e
capacitivas para o solo. Esses efeitos são representados de forma equivalente na
Figura2‐1pormeiodeumacondutânciaGeumacapacitânciaCemparalelo.Acorrente
deconduçãoI éproporcionalàcondutividadeelétricadosolo,σ,estandoemfasecoma
tensão transversalV ,enquanto que a corrente de deslocamento ou capacitivaI é
proporcionalaoprodutodafrequênciaangularassociadaao fenômenosolicitantepela

8
permissividadeelétricadosolo, ,estandodefasadaemrelaçãoàtensãotransversalV
de 90°. Vale mencionar que a relação entre essas correntes, condutiva e de
deslocamento(oucapacitiva),nãodependedascaracterísticasgeométricasdoeletrodo
deaterramentoesimunicamentedaspropriedadesdosoloedafrequência.
Acorrentelongitudinalestáassociadaàsperdasinternasdomaterialcondutore
aosefeitosdenaturezaindutivadevidoaocampomagnéticoproduzidodentroeforado
condutor quando da passagem da correnteI . Na Figura 2‐1, esses efeitos são
representadosdeformaequivalente,respectivamente,porumaresistênciaReporuma
indutânciaemsérieL.
Nocasodesolicitaçõeslentas,algumassimplificaçõespodemserconsideradasno
circuito da Figura 2‐1. Em função do valor reduzido de frequência, a reatância
longitudinal(denaturezaindutiva)easusceptânciatransversal(denaturezacapacitiva)
podemserdesprezadas,umavezquesãoambasproporcionaisà frequência.Também,
pode‐se desconsiderar a resistência longitudinal já que, nessa faixa de frequência, a
queda de tensão ao longo do eletrodo é desprezível. Assim, o aterramento pode ser
basicamenterepresentadoapenasporsuacondutânciatransversal,conformeilustrado
na Figura 2‐2. O inverso dessa condutância corresponde ao difundido conceito de
“resistênciadeaterramento”.ValelembrarquearepresentaçãodocircuitodaFigura2‐2
ésimplificadaeque,emumaavaliaçãomaisrigorosa,oaterramentoseriarepresentado
por uma série de condutâncias em paralelo, assegurando‐se a inclusão dos efeitos
condutivos mútuos entre elas. O inverso do equivalente desse paralelo fornece a
resistênciadeaterramento.
Figura2‐2‐Simplificaçãodocircuitoequivalentedeumapequenapartedoaterramentoelétricoparasolicitaçõesdefenômenosdebaixafrequência.
Combasenoexposto,nacondiçãodebaixasfrequências,oaterramentoelétrico
podeserrepresentado,deformasimplificada,porumaresistênciaenãomaisporuma
impedância complexa. Tal resistência, denominada neste estudo de R, corresponde à

9
razão entre a elevação de potencial no aterramento em relação ao infinito, V, e a
correntequecirculapeloaterramento,I,ouseja:
RVI. (2.1)
Dasconsideraçõesrealizadas,depreende‐setambémqueacorrentequedispersa
paraosolopeloaterramentopossui,nocasodebaixasfrequências,naturezacondutiva.
Tal corrente provoca elevações de potencial no entorno do aterramento, inclusive na
superfície do solo. A determinação da distribuição dos potenciais no solo é de
fundamental importância, uma vez que, dependendo da diferença de potencial entre
doispontosnaregiãopróximaaoaterramento,pode‐secolocaremriscoasegurançados
seres vivos. Além disso, equipamentos podem sofrer danos. Uma descrição mais
detalhadadessespotenciaiséapresentadanaSeção2.4.
A quantificação da resistência de aterramento e da distribuição de potenciais
dependedas característicasdo solo emqueo sistemade aterramento está enterrado,
mais especificamente de sua resistividade elétrica ( = 1/), no caso de solicitações
lentas. Em particular, pode‐se mostrar que, para o caso de um solo homogêneo, a
resistência de aterramento e os potenciais no nível do solo relacionam‐se com a
resistividade do soloρpor meio de um fator de proporcionalidade que depende da
dimensãoedaformadoseletrodosdeaterramento.Nessesentido,acorretamodelagem
dosoloéumatarefafundamentalemprojetosdesistemasdeaterramento.
O solo, em geral, apresenta uma estrutura complexa no que se refere à sua
composição. Na maioria dos casos ele não pode ser considerado homogêneo e é
modeladoporumasériedecamadascomdiferentesresistividades.Fatorestaiscomo,a
umidade,aconcentraçãodesais,atemperaturaeacompactaçãodosoloinfluenciama
resistividade do solo. Dada a importância da modelagem do solo nos cálculos
envolvendo aterramentos elétricos, a Seção 2.3 apresenta, de forma sucinta, alguns
aspectos relevantes relativos a essa modelagem no âmbito de fenômenos de baixas
frequências.

10
2.3. ModelagemdoSolo
Aresistividadedosoloteminfluênciasignificativasobreoprojetodosistemade
aterramento; por isso, é de fundamental importância entender o seu conceito. São
muitos os fatores que influenciam a resistividade do solo. Isso dificulta o
desenvolvimentodeequaçõesqueestabeleçamumvalorparaaresistividade,emfunção
dessesfatores.Asoluçãoparaestaquestãoconsistenarealizaçãodemediçõesnolocal
deinstalaçãodoaterramentoparadeterminaçãoexperimentaldaresistividadedosolo.
Amediçãoderesistividadeéefetuadabasicamentededuasformas:mediçãopor
amostrageme/oumediçãolocal.Aprimeiradelasérealizadaemlaboratório,ensaiando‐
se uma amostra de solo coletada no local cuja resistividade deseja‐se conhecer. Já a
segundaformaérealizadaemcampodetectando‐seospotenciaisestabelecidosnomeio
quando se faz circular uma corrente pelo solo através de eletrodos posicionados
adequadamente nesse meio, sendo comumente utilizados os métodos de Frank
Wenner[17]edeSchlumberger[18].
Em muitos casos, o método de medição por amostragem não apresenta
resultadosprecisos,poisaamostradosolocoletadapodenãorepresentarexatamente
as características predominantes do solo. Mesmo no caso de se ter muitas amostras,
ainda assim, não se pode garantir que tais amostras configurem com fidelidade a
composiçãodosolo,devidoàpropriedadedeanisotropiadomeio.Taisinconvenientes
fazem com que amedição local de resistividade diretamente em condições de campo
sejaamaisempregada.
A partir dos resultados de medição pode ser estabelecido um modelo que
descrevadeterminadascaracterísticasdosolo.Conformemencionadoanteriormente,o
solo éummeio complexo e, raramente, pode ser consideradohomogêneo.Naprática,
recorre‐seaosmodelosdeestratificaçãodosolo,osquaisconsideramsuaconstituição
emdiversas camadas, cadaqual comumvalor específicode resistividade e espessura
definida. A Figura 2‐3 apresenta uma estratificação do solo em duas camadas
horizontais, comumente utilizada em engenharia. Vale ressaltar que, quanto maior o
númerodecamadas,maiscomplexatorna‐seamodelagem.

11
Figura2‐3‐Soloestratificadoemduascamadashorizontaisderesistividadesdistintas.
2.4. FunçõesBásicasdoAterramento
O aterramento pode desempenhar diferentes funções no sistema elétrico. Para
atenderaessasdiversasfunçõeselepodeassumirtopologiasvariadas,considerando‐se
a forma,oposicionamentoeadimensãodoseletrodos.Entretanto,apesardessagama
de aplicações, o projeto de um sistema de aterramento tem sempre como base dois
fatoresfundamentais:
Odesempenhodosistemaaterrado;
Asegurançadeseresvivoseaproteçãodeequipamentos.
Odesempenhodosistemaaterradoestárelacionadodiretamentecomovalorde
suaresistênciaouimpedância,dependendodocaso.Quandodaocorrênciadeumafalta
nosistemaqueenvolvaaterra,essaresistênciaéresponsávelporlimitaracorrenteque
fluiparaaterrae/ouaelevaçãodepotencialresultante.Emalgunscasos,aobtençãode
baixas resistências de aterramento está relacionada com a filosofia de proteção do
sistemaelétrico.Valoresbaixosderesistênciapermitemacirculaçãodealtosvaloresde
correntedecurto‐circuitoresultandoemumaatuaçãomaisrápidadaproteção.Ainda,
tambémédesejávelumaterramentocombaixovalorderesistêncianaquelescasosem
que o solo é empregado como um condutor de retorno, por exemplo, em sistemas
monofásicos com retorno pela terra (MRT) e em linhas de transmissão de corrente
contínuaemoperaçãomonopolar.
Alémdeproverumcaminhodebaixaresistênciaparafaltasnosistemaelétrico
ouparacirculaçãodecorrentesderetorno,outroobjetivoimportantedoaterramentoé
d1
d2 =∞
ρ1
ρ2
Superfíciedosolo
12
odepromoveradistribuiçãoseguradospotenciaisgeradosnosologarantindo,assim,a
segurançadosseresvivos.
Acirculaçãodeumacorrentede falta,I ,atravésdeumsistemadeaterramento
provoca uma elevação de potencial em relação ao terra remoto (grande distância ao
aterramento),dadapeloprodutoda resistênciadoaterramentopelacorrente injetada
nomesmo.Ovalordessaelevaçãodepotencial,GPR1,juntamentecomadistribuiçãode
potenciais no nível do solo são importantes para a determinação dos parâmetros
relacionadoscomoníveldesegurançadoaterramento:tensãodepasso,tensãodetoque
etensãodetransferência.
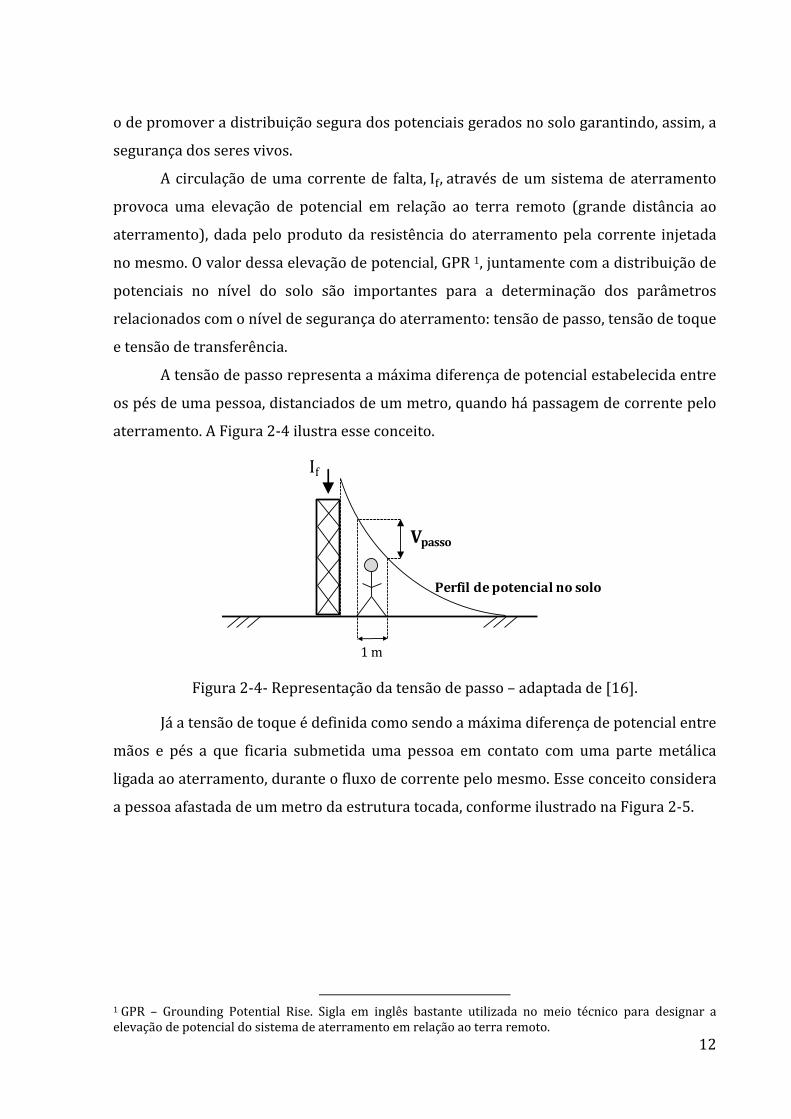
Atensãodepassorepresentaamáximadiferençadepotencialestabelecidaentre
ospésdeumapessoa,distanciadosdeummetro,quandohápassagemdecorrentepelo
aterramento.AFigura2‐4ilustraesseconceito.
Figura2‐4‐Representaçãodatensãodepasso–adaptadade[16].
Jáatensãodetoqueédefinidacomosendoamáximadiferençadepotencialentre
mãos e pés a que ficaria submetida uma pessoa em contato com uma partemetálica
ligadaaoaterramento,duranteofluxodecorrentepelomesmo.Esseconceitoconsidera
apessoaafastadadeummetrodaestruturatocada,conformeilustradonaFigura2‐5.
1GPR – Grounding Potential Rise. Sigla em inglês bastante utilizada no meio técnico para designar aelevaçãodepotencialdosistemadeaterramentoemrelaçãoaoterraremoto.
If
Vpasso
Perfildepotencialnosolo
1m

13
Figura2‐5‐Representaçãodatensãodetoque–adaptadade[16].
AFigura2‐6ilustraoconceitodetensãodetransferência,quecorrespondeaum
casoextremoemqueapessoaésubmetidaaumadiferençadepotencial igualaoGPR.
Trata‐sedeumcasoespecialdatensãodetoqueemqueapessoaestáposicionadano
terraremotoeentraemcontatocomalgumapartemetálicaconectadaaoseletrodosdo
aterramento, durante o fluxo de corrente pelo mesmo. Nesse caso, o potencial dos
eletrodosétransferidoparaapessoa,queficasubmetidaaumadiferençadepotencial
igualaoGPRdesenvolvidonosistemadeaterramento.
Figura2‐6‐Representaçãodatensãodetransferência–adaptadade[16].
Astensõesdepasso,toqueedetransferênciapromovemofluxodecorrentepelo
corpo do ser humano que, eventualmente, esteja localizado na região próxima ao
sistemadeaterramento,podendoprovocardanosasuasaúde,taiscomolesõesfísicas,
queimaduraseatéamorte.Asconsequênciascausadaspelacirculaçãodecorrenteno
If
Vtoque
Perfildepotencialnosolo
1m
If
VtransferidaPerfildepotencialnosolo

14
corpo estão relacionadas com amagnitude, o tempo de duração e a frequência dessa
corrente [19]. A determinação de patamares seguros para as tensões citadas
correspondeaocritérioprincipaldeprojetodeaterramentoscujafunçãoprimáriasejaa
segurançadeseresvivos.
2.5. ArranjosTípicosdeAterramento
Ossistemasdeaterramentoelétricopodemassumirconfiguraçõesdiversificadas
devidoàamplavariedadedearranjosdeaterramento.Otipodearranjoaserutilizado
depende, dentre outros fatores, da área disponível para a instalação e da função
principal a ser desempenhada pelo aterramento. Dentre as configurações adotadas
destacam‐seasmalhasdeaterramento,oscaboscontrapesoseashastesverticais.
As malhas de aterramento são bastante utilizadas em subestações elétricas,
sendoqueosprincipaisconceitosrelacionadosaoprojetodessetipodeaterramentosão
apresentadosno IEEEStd80‐2000[19]enaABNTNBR15751[20].Apesardeserem
normasdirecionadasparaaterramentosdesubestações,asmesmasfornecemumaideia
amplasobreaterramentoselétricosemgeral.
Os cabos contrapesos,por suavez, sãoutilizados,principalmente, em linhasde
transmissão (LTs)de energia elétrica.O comprimentodos cabos contrapesos a serem
instaladosvariamemfunçãodaresistividade local.Normalmente,essecomprimentoé
selecionado de modo a reduzir a impedância de pé de torre com a finalidade de
minimizarassobretensõesgeradasquandodaincidênciadedescargasatmosféricasem
LTs.
Autilizaçãodehastesdeaterramentoconstituiumadas formasmais simplese
mais empregadas como meio de conexão do sistema elétrico a terra. Esse tipo de
configuraçãoépredominantementeadotadanossistemasdeaterramentodeneutrosde
transformadores de redes de distribuição, em linhas de distribuição localizadas em
áreas urbanas, em aterramentos de sistemas de telecomunicações e em sistemas de
aterramentoresidenciaiseprediais.

15
2.6. ModeloMatemático
Ocálculodaresistênciadeaterramentoedadistribuiçãodepotenciaisnosoloé
muitoimportanteemtermosdeprojeto.Existemváriasformasderealizaressecálculo,
sendoelas,divididasbasicamenteemdoisgrupos,asaber:
Métodosanalíticos;
Métodosnuméricos(integraisediferenciais).
Essesmétodosdiferementresiquantoàformulaçãomatemáticaadotadaparaa
obtenção dos parâmetros do aterramento. Nesta seção é apresentada a modelagem
empregada por cada um deles, explicitando suas características fundamentais. São
descritostambém,osprincipaistrabalhosdaliteraturaqueutilizamcadamétodo.
2.6.1. MétodosAnalíticos
Os primeiros trabalhos envolvendo o cálculo de grandezas associadas a
aterramentos elétricos tais como a resistência de aterramento e os potenciais
desenvolvidos na superfície do solo foram de cunho analítico. Nesta época, que
compreende aprimeirametadedo século20, haviauma considerável restrição em se
lidar com soluções mais elaboradas envolvendo a modelagem de sistemas de
aterramento,umavezqueacapacidadedeprocessamentocomputacionaleralimitada.
Dentre os pesquisadores que contribuíram para o desenvolvimento de métodos
analíticos aplicados a sistemas de aterramento destacam‐se: Dwight [21], Sunde [2],
Gross[22],[23],Tagg[24]eRudenberg[25].
Ostrabalhosdessespesquisadoreslevaramàobtençãodefórmulasmatemáticas
simplificadas para a determinação da resistência de aterramento de arranjos típicos
compostos por hastes e eletrodos horizontais. Além disso, as contribuições desses
pesquisadoresforamimportantesparaaelaboraçãodeprocedimentosenormascomo
[19],[20]queapresentamformulaçõesanalíticassimplificadasparaoprojetodemalhas
deaterramento,quandosubmetidasafenômenosdebaixasfrequências.
Cabe aqui destacar que a aplicação dosmétodos analíticos é limitada, uma vez
queumasériedesimplificaçõessãoassumidasparaseobterexpressõesdecálculode
resistênciadeaterramentoedistribuiçãodepotenciais.Osresultadosobtidosapartirde

16
suautilizaçãoapresentamboaconcordânciaapenasparaconfiguraçõesdeaterramentos
maissimples.Nocasodearranjosdeaterramentosmaiscomplexosouquandosedeseja
uma boa exatidão na determinação da distribuição de potenciais no nível do solo, os
métodos analíticos fornecem apenas uma primeira aproximação e técnicas mais
elaboradas,comoasdescritasnaSubseção2.6.2,devemserempregadas.
2.6.2. MétodosNuméricos
Paraaobtençãodesoluçõescommaiorgraudeexatidãorecorre‐se,emgeral,a
métodosnuméricos,quecorrespondemaumconjuntodeferramentasadotadasparase
determinar de forma aproximada, soluções numéricas de problemas descritos por
equações matemáticas. Os métodos numéricos são classificados de acordo com as
característicasdetaisequações,podendoserdotipointegraloudiferencial.
Aaplicaçãodosmétodosnuméricosparaaavaliaçãodossistemasdeaterramento
começoua ganhar forçana segundametadedadécadade1970e iníciodadécadade
1980,aindaquedeformalenta,emsubstituiçãoaosmétodosanalíticos,tendoemvistao
aumentodacapacidadedeprocessamentodoscomputadores.
2.6.2.1. MétodosNuméricosIntegrais
Naanálisedocomportamentodesistemasdeaterramentoembaixasfrequências,
umadasclassesdemétodosnuméricosutilizadasparaasoluçãodasequaçõesobtidasa
partir da aplicação da teoria eletromagnética são os métodos integrais. Dentre os
métodospertencentesaestacategoria,destaca‐seoMoM[4].
A aplicação do MoM em problemas de aterramento elétrico é realizada
discretizado‐seosistemadeaterramentoemdiversoselementoseainteraçãoentreeles
édeterminadapelaaplicaçãodasequaçõesdoeletromagnetismo.
Aequação integralaserresolvidapeloMoMtema formadaEquação(2.2).Ela
descreve o comportamento eletromagnético de aterramentos elétricos para
configuraçõesgeraisdeaterramentoeconsiderandoaaproximaçãodefiofino.

17
V1
4 σ, (2.2)
em que, V é o potencial ao longo do elemento produzido pela densidade linear de
corrente que deixa o elemento , e são aos comprimentos dos elementos e ,
respectivamente, e corresponde à distância entre cada elemento diferencial ( ) dos
elementos e .
AaplicaçãodoMoMàEquação(2.2)érealizada,basicamente,daseguinteforma:
Em baixas frequências, pode‐se assumir que V é constante ao longo do sistema de
aterramentoeigualaumvalorarbitrário.Nessecaso,aincógnitaconsistenointegrando
daequação,ouseja,acorrente quedispersadoelemento .Aplicando‐seométodo,a
equação integraléreduzidaaumsistemadeequações lineares,cujasolução fornecea
distribuição de corrente ao longo dos eletrodos de aterramento. A partir dessa
distribuição de corrente é possível determinar a resistência de aterramento e a
distribuiçãodepotenciaisnosolo.
Algunstrabalhosqueadotamessaabordagem,emboracompequenasvariações
deumparaooutro,sãoapresentadosem[26]‐[40].
As vantagens em se utilizar o MoM na solução de problemas de aterramento
residemno fatodequeessa técnicaé adequadapara tratarproblemasabertos e éde
fácil aplicação em geometrias simples, como é o caso das configurações típicas de
aterramento.
Por outro lado, ao se utilizar essemétodo tem‐sedificuldade em se considerar
meiosheterogêneos,comoéocasodesolosreaisemqueoseletrodosestãoinseridos.
Embora solos estratificados em camadas horizontais possam ser considerados pela
extensão do Método das Imagens [35], a consideração de meios com mais de duas
camadaslevaaumelevadocustocomputacional,principalmentedependendodoarranjo
de aterramento avaliado. Muitas vezes, adota‐se um solo homogêneo com uma dada
resistividade equivalente, o quenem sempre leva a resultadosprecisos, sobretudono
cálculodadistribuiçãodepotenciaisnoníveldosolo.

18
2.6.2.2. MétodosNuméricosDiferenciais
Outra classe demétodos numéricos empregada namodelagem de sistemas de
aterramento são os métodos diferenciais. Dentre os principais representantes desta
classe, aquele que predomina amplamente no caso de aterramentos elétricos é o
FEM[3].
Na aplicação do FEM, o domínio do problema é dividido em pequenos
subdomínios com formase comprimentosarbitrários,denominadosdeelementos.Em
cada elemento, os valores dos potenciais são aproximados por meio de funções de
interpolação e, utilizando‐se o Método dos Resíduos Ponderados ou o Método
Variacional, a equação diferencial parcial é transformada em uma equação integro‐
diferenciale,emseguidaéconvertidaaumsistemaalgébricodeequações[41].Ocampo
elétrico, calculado através dos valores dos potenciais, é utilizado para a obtenção da
distribuição de corrente no sistema de aterramento. A partir dessa distribuição de
correntedetermina‐searesistênciadoaterramento.
A grande vantagem da utilização do FEM na modelagem de sistemas de
aterramento consiste na facilidade de tratar o solo onde o aterramento está inserido
comosendoummeioheterogêneo.Comodesvantagem,pode‐sedestacaranecessidade
dométododedelimitarodomíniodeproblemasabertos,comoéocasodossistemasde
aterramento, o que pode ter impacto na solução caso não seja realizado de forma
adequada.Outradesvantagemestárelacionadacomotamanhododomíniodoproblema
que,dependendodadimensãodoarranjodeaterramentoanalisado,podeimplicarum
alto custo computacional, uma vez que o método requer a geração de uma malha.
Trabalhosqueutilizamométododoselementosfinitosparaamodelagemdesistemas
deaterramentoembaixasfrequênciassão[42]‐[46].
Neste trabalho é utilizada uma abordagem diferencial para a modelagem de
sistemas de aterramento elétrico. Em particular, é apresentada uma contribuição
inovadora, que corresponde à avaliação da aplicabilidade dos MM à solução de
problemasdeaterramento.Osmétodossemmalhapossuemumhistóricorecenteetêm
sidoutilizadosdeformaeficazparatratarmuitosproblemascomplexos.Aocontráriodo
FEM,osMM,emespecíficooIEFGM,nãorequeremousoexplícitodemalhas.
Assim,neste trabalho,propõe‐seumamodelagemapartirdeumaconfiguração

19
Figura2‐7‐Sistemadeaterramentoconstituídodeumahastedeaterramentoinseridaverticalmenteemsolohomogêneo.
deaterramentocompostaporumahasteenterradaverticalmenteemsolohomogêneo
decondutividadeσ,definidoporumvolumesemiesféricoderaioRD,submetidaauma
correnteestacionáriaqueprovocaumaelevaçãodepotencialV nahaste.Oproblemaé
ilustradonaFigura2‐7.
O problema tridimensional associado à dissipação da corrente estacionária no
solopodesermodeladoapartirdasequaçõesdeMaxwell[47]:
0, 2.3
∙ 0, 2.4
σ , 2.5
emque éocampoelétricoe éadensidadedecorrenteelétrica.
A Equação (2.3) indica que em regime estacionário o campo elétrico é
irrotacional,eassim,deveexistirumpotencialescalarelétricoV,talque:
V. 2.6
Substituindo(2.6)em(2.5)e(2.4)tem‐seoseguinteproblemadecontorno:
. σ V 0 em Ω, 2.7
Solo
Ar z
Haste
r
RD
RD
Vh
Lh

20
V V em Γ , 2.8
∂V∂
0 em Γ , 2.9
emqueΩé odomíniodoproblema,Γ corresponde às fronteirasdeDirichlet, que são
fronteiras onde o potencialVé imposto ou conhecido,Γ corresponde às fronteiras de
Neumann, que são fronteiras onde a derivada do potencial na direção normal é
conhecida,e éovetorunitárionormalexternoàΓ .
Aequaçãodiferencial(2.7)quedescreveofenômeno,correspondeàequaçãode
Laplace, sujeita às condições de contorno de Dirichlet (2.8) emΓ e de Neumann
homogênea(2.9)emΓ .Asoluçãodoproblema formulado forneceopotencialelétrico
emqualquerpontododomínioΩ.Essasequaçõessãoconhecidascomoformafortedo
problema.Paraalgunscasospráticos,comooproblemasobestudo,asoluçãoanalíticaa
partir da forma forte é difícil ou mesmo impossível. Assim, é possível formular o
problemademodoaadmitircondiçõesmaisfracasparaasoluçãoesuasderivadas[42].
Paraaanálisedosistemadeaterramentoemestudo,éconvenienteaadoçãodo
sistemadecoordenadascilíndricas.Assim,aEquação(2.7)podeserreescritacomo:
σ1r∂∂r
r∂V∂r
σ1r∂ V∂ϕ
σ∂ V∂z
0 em Ω. 2.10
Paraseobtera formafracadaEquação(2.10)aplica‐seoMétododosResíduos
Ponderados [3], [48], utilizando como função de ponderação, conforme indicado na
Equação(2.11):
σ1r∂∂r
r∂V∂r
σ1r∂ V∂ϕ
σ∂ V∂z
dΩ 0, 2.11
emquedΩrepresentaodiferencialdevolume,queparaestecasoéigualardrdϕdz.
Devidoàsimetriaaxialdoproblema,épossívelabordá‐lodeformabidimensional.Para
isso, considera‐se a parcela ∂V/ ∂ϕda Equação (2.11), igual a zero, uma vez que o
potencial elétrico não varia na direçãoϕ. Assim, apenas o planorzé considerado,
conformeilustradonaFigura2‐8.

21
Figura2‐8‐Simplificaçãodoproblemadeaterramento.
RearranjandoaEquação(2.11)tem‐se:
σ1r∂∂r
r∂V∂r
σ1r∂∂z
r∂V∂z
rdΩ 0, 2.12
emquedΩrepresenta,nestecaso,odiferencialdeáreaqueéigualadrdz.
SimplificandoaEquação(2.12)chega‐seàseguinteexpressão:
σ∂∂r
r∂V∂r
σ∂∂z
r∂V∂z
dΩ 0. 2.13
DesenvolvendoaEquação(2.13)eefetuando‐seaintegraçãoporpartestem‐sea
formafracadoproblemadadapor:
∂∂r
σ∂V∂r
∂∂z
σ∂V∂z
rdΩ σr∂V∂r
∂V∂z
dΓ 0. 2.14
Considerando ∈ ,ouseja,afunçãodeponderaçãopertencenteaumconjunto
de funções que se anulam emΓ Γ ∪ Γ e cujas derivadas primeiras tenham de
quadradointegrável;eascondiçõesdecontornodeNeumannhomogêneas,otermoda
integralnocontornoΓseanulaeaEquação(2.14)sereduza:
n
n
d
z
Solo
Ar
r
RD
Lh
RD
n
Vh
Haste

22
rσ
Vr z
σVz
rdΩ 0. 2.15
Para simplificar a notação utilizada neste estudo, a forma fraca definida pela
Equação(2.15)podeserescritadaseguintemaneira:
B V, 0, 2.16
emqueB V, éaformabilinearsimétricadadapor:
B V,∂∂r
σ∂V∂r
∂∂z
σ∂V∂z
rdΩ. 2.17
2.7. ConsideraçõesFinais
Neste capítulo foram apresentados inicialmente os conceitos básicos
relacionadoscomossistemasdeaterramentoembaixasfrequências.Foimostradoque
existem várias técnicas para calcular as grandezas relacionadas com o aterramento,
sendo uma delas, a partir de métodos numéricos. Dentro desse grupo de métodos
existem osmétodos integrais e diferenciais. Para a classe demétodos diferenciais foi
apresentada uma modelagem matemática para o problema de uma haste de
aterramento inserida em solo homogêneo. Foi obtida a forma fraca do problema
analisadoparasersolucionadapeloMM.

23
Capítulo3
MétodossemMalha
3.1. Introdução
Neste capítulo é apresentada a modelagemmatemática dométodo semmalha
IEFGMqueseráaplicadanoestudodeaterramento.Sãotambémexpostososmétodos
para construção das funções de formausando oMLS e o IMLS. Ao final do capítulo é
apresentadoocritériodevisibilidadeutilizadopeloIEFGMnotratamentodeinterfaces
entreregiõescomdiferentesmateriais.
3.2. ConceitosBásicos
Os fenômenos físicos analisados em engenharia requerem frequentemente a
utilização de ferramentas computacionais para a solução das equações diferenciais
parciais ou integrais que os governam. No caso das equações diferenciais, essas
ferramentas computacionais utilizam métodos numéricos para a obtenção de uma
soluçãoparaoproblemadevalordecontorno.
Ao longo dos anos, osmétodos numéricosmais empregados para este fim têm
sido os métodos baseados em malha. Esses métodos têm como característica, a
discretizaçãododomíniodoproblemautilizando‐seumagrade.Adespeitodessagrande
utilização, os métodos baseados em malha apresentam dificuldades e um gasto
computacionalaltoparagerarmalhasadequadasaproblemascujodomínioapresenta
descontinuidades,fronteirasmóveisoudeformações[10].Essaslimitaçõestêmlevadoa
buscadealternativasaousodetaismétodos.Umadasalternativaspromissorasrefere‐
seàutilizaçãodaclassedemétodossemmalha.
Osmétodos semmalha possuem um histórico recente e tem sido utilizado de
formaeficazpara tratarmuitosproblemas complexosde seremresolvidos apartirde
outros métodos computacionais. A técnica surgiu por volta de 1977 com o Método

24
HidrodinâmicadePartículas Suavizado (SmoothedParticleHydrodynamics–SPH) [49].
Contudo, apenas nos últimos vinte anos essa classe de métodos tem recebido uma
atençãomaior da comunidade científica, o que se reflete na quantidade de trabalhos
propondo métodos que utilizam a técnica. Entre os mais conhecidos e difundidos
destaca‐seoMétododeElementoDifuso(DiffuseElementMethod–DEM)[50],EFGM[7],
Método de Partícula com Núcleo Reproduzido (ReproducingKernelParticleMethod–
RKPM)[51],MétododePontoFinito(FinitePointMethod–FPM)[52],[53]eoMétodo
LocaldePetrov–GalerkinsemMalha(MeshlessLocalPetrov‐Galerkin–MLPG)[54].
Aprincipal característicada técnicaéo fatodenãorequererousoexplícitode
malhas. É necessário apenas uma distribuição de nós sem conectividade pré‐
estabelecidaentreeles,espalhadossobretodoodomíniodeinteressequecontémuma
função desconhecida regida por um Problema de Valor de Contorno (PVC). Essa
distribuição de nós sobre o domínio em conjunto com a descrição das condições de
contorno do problema e a definição das interfaces entre osmeiosmateriais distintos
caracterizamométodo.AFigura3‐1mostraumadistribuiçãodenóssobreumdomínio
deduasdimensõesΩ Ω ∪ Γ,ondecadanóéumponto r, z [6].
Figura3‐1‐Distribuiçãodenósespalhadossobreumdomínio2D.
Éassociadoacadanóumsubdomíniofechadodenominadodomíniodeinfluência
donó,queformaoapoioparaaconstruçãodafunçãodeaproximaçãoaoredordonóI,
denominada de função de forma,Φ . Esses subdomínios podem ter formas variadas e
geralmente são sobrepostos. A única exigência em relação a estamodelagem é que a
união desses subdomínios cubra todo o domínio do problema, conforme ilustrado na
Figura3‐2.
Fronteira
xI
Nós
Ω

25
Figura3‐2‐Domíniosdeinfluênciacircularesdistribuídosportodoodomíniodoproblema.
Osnósdistribuídosaolongododomíniorelacionamentresiatravésdasfunções
deforma.Essarelaçãoéestabelecidaapartirdaaplicaçãodetaisfunçõesempontosde
integraçãodistribuídossobretodoodomíniodoproblema.A escolha do processo de
construçãodafunçãodeformaédefundamentalimportânciaparaaobtençãodebons
resultadosquandoseutilizamétodossemmalha.
Noprocessodeobtençãodasoluçãodasequaçõesdiferenciaisparciaisqueregem
o PVC utilizam‐se métodos diretos ou métodos indiretos. O primeiro deles, também
chamado de métodos de forma forte, se caracteriza por discretizar e resolver o
problemadiretamenteapartirdaEquaçãoDiferencialParcial queo rege.Osmétodos
indiretospor suavez, tambémconhecidoscomométodosde forma fraca, estabelecem
inicialmenteumsistemadeequaçõesalternativobaseadona forma fracadaEDPpara
posteriormente, solucionar o problema. Nosmétodos semmalha, tanto formas fortes
quanto fracas são utilizadas [6]. Os métodos SPH, DEM, EFGM, RKPM e MLPG, por
exemplo,sebaseiamemmétodosdeformafracaenquantooFPMutilizaaformaforte.
Osmétodosdeformafracasãogeralmentemaisrobustos,estáveis,precisoseeficientes,
e,porisso,demaiorimportânciaprática[55].
3.3. OMétodoElement‐FreeGalerkin(EFGM)
Dentreosmétodossemmalha,oEFGMéumdosmaisconhecidoseutilizados[7].
O EFGM é um método sem malha amplamente empregado na área de engenharia
aplicada,principalmentena soluçãodeproblemasdevalorde contorno.Ométodo foi

26
propostoem1994porBelytschko[7]e temcomobaseoMétododoElementoDifuso.
Aplicado inicialmenteaproblemasdemecânica [7], [56],oEFGMteveasuautilização
estendida para diferentes classes de problemas tais como, propagação de onda [57],
acústica[58],[59],fluxodefluidos[60]emodelagemdedispositivoseletromagnéticos
[8].
Nestemétodo,adiscretizaçãodoespaçoeaconstruçãodasfunçõesdeformasão
realizadas utilizando‐se o MLS. As funções de forma são usadas como base para a
construçãodeumsubespaçodedimensãofinitaeaformafracadométododeGalerkiné
utilizada para o desenvolvimento do sistema discreto de equações lineares. Para a
obtenção da solução desse sistema são necessárias células de integração distribuídas
pelodomíniodoproblemaparaarealizaçãodaintegraçãonumérica.
3.3.1. FunçãoJanela
A função janela, , é uma função utilizada para a construção da função de
forma associada a cada nó distribuído no domínio do problema. As diferentes
formulações para os métodos sem malha são caracterizadas principalmente pela
maneiracomoafunçãodeformaassociadaacadanóégeradaapartirdafunçãojanela.
Afunçãojanelaéditadesuportecompacto,ouseja,aregiãodoseudomínioonde
a função possui um valor diferente de zero é limitada. O suporte da função janela,
considerandocomoorigemdodomíniodeinfluênciaumponto r, z ∈ Ω,éaregião
doseudomínioondeafunçãoédiferentedezero.Essesuporteécompactosearegiãoé
limitada[42].Assim,tem‐seafunçãojaneladefinidapor:
0,se 0‖ ‖
1
0, se‖ ‖
1
∀ ∈ Ω, I 1,2, … , N. 3.1
emque éotamanhodosuportedafunção,tambémdenominadoderaiodosuporteou
domíniodeinfluênciaeNéonúmerototaldenósdistribuídosnodomínioΩ.Paraum
ponto deinteresse,adimensãododomíniodeinfluênciaédadapor:
27
. 3.2
emque éumaconstanteparaoajustedotamanhododomíniode influênciaque,em
geral,variaentre1,5e4[7],e éadistâncianodalquedependedadistribuiçãodosnós
consideradanaanálise.
Deacordocom[42],associa‐seàfunçãojaneladuaspropriedades:
Propriedadede translação: permite que a função janela se desloquepor
todoodomínio,característicaesta,quepossibilitaqueosMMdispensemo
usodemalhas;
Propriedadededilatação:utilizadacomoparâmetroderefinamentoeestá
associadacomotamanhodosuportedafunçãojanela.
A função janela fornece pesos diferentes para os nós no domínio de influência.
Quantomaisdistanteonóestádopontodeaproximação,menoréoseupeso.Pormeioda
funçãojanelatambémépossívelfazercomqueosnósabandonemouentremnodomíniode
influênciademaneirasuave[6].Váriasfunçõespodemserutilizadascomofunçãojanela,
entretanto,asmaiscomumenteutilizadassão:Funçãogaussiana,SplinecúbicaeSpline
quadrática[42].
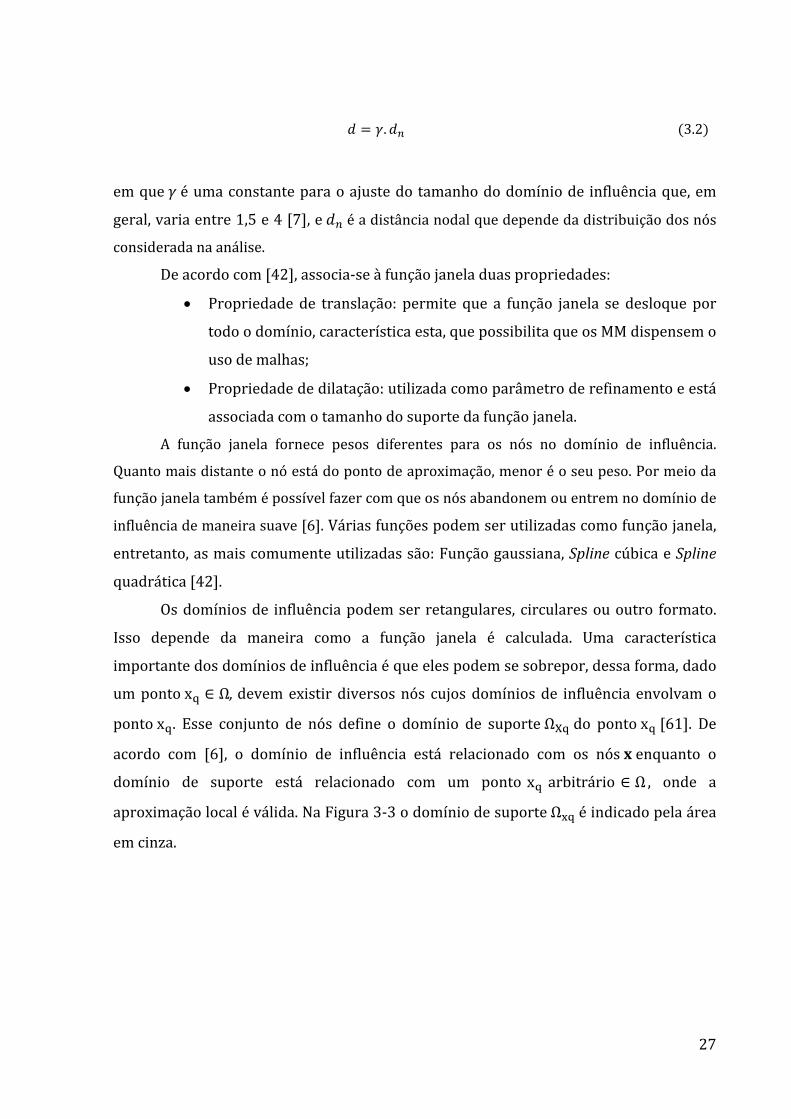
Osdomíniosde influênciapodemserretangulares, circularesououtro formato.
Isso depende da maneira como a função janela é calculada. Uma característica
importantedosdomíniosdeinfluênciaéqueelespodemsesobrepor,dessaforma,dado
umpontox ∈ Ω,devemexistirdiversosnós cujosdomíniosde influência envolvamo
pontox . Esse conjunto de nós define o domínio de suporteΩ do pontox [61]. De
acordo com [6], o domínio de influência está relacionado com os nós enquanto o
domínio de suporte está relacionado com um pontox arbitrário∈ Ω , onde a
aproximaçãolocaléválida.NaFigura3‐3odomíniodesuporteΩ éindicadopelaárea
emcinza.

28
Figura3‐3‐DomíniodesuporteΩ deumpontox .
A função janela possui um papel fundamental nos métodos sem malha, pois
transfereassuascaracterísticas,qualsejam,contínuasecomsuportecompacto,paraa
funçãodeformaduranteasuaconstrução.
3.3.2. MétododeGalerkin
O método de Galerkin faz parte de uma classe de métodos denominados de
MétodosdeResíduosPonderados,quesãoutilizadosparaaconstruçãodaformafraca
discretadoPVC[3].
As funções que satisfazem a forma fraca da equação de Laplace, dada pela
Equação (2.15), pertencem ao espaço Ω , que é um espaço linear de funções cuja
dimensãoéinfinita.Estaúltimacaracterísticatornadifícilabuscaporumasoluçãopara
a forma fraca do problema. Recorre‐se então aoMétodo de Galerkin, que consiste na
busca por uma solução aproximada em um espaço de dimensão finita Ω ,tal que
Ω ⊂ Ω [61].Seja Ω oespaçodetodasascombinaçõeslinearesdotipo:
, 3.3
emque sãofunçõesdeformapertencentesaumafamíliadefunçõesnoespaço Ω
comI 1,2, … , Ne sãoconstantesarbitráriasconsideradasiguala1nestetrabalho.
OmétododeGalerkinconsistenabuscadafunçãoincógnitaVtalqueV Ω .
Essafunçãotambémpodeserdescritaporumacombinaçãolineardotipo:

29
V Φ V , 3.4
emqueΦ sãofunçõesdeformaeV sãocoeficientesaseremdeterminados.
Substituindo(3.3)e(3.4)em(2.16)tem‐se:
B V , 0. 3.5
OmétododeGalerkinconsideraque Φ .Comisto,eutilizandoapropriedade
debilinearidadedeB,aEquação(3.5)éescritacomo:
B V , B Φ V ,Φ 0. 3.6
Assimobtém‐seosistemadeequaçõeslinearesapresentadoaseguir:
V K 0, J 1,2, … , N 3.7
emque
K B Φ ,Φ∂Φ∂r
∂Φ∂r
∂Φ∂z
∂Φ∂z
rdΩ. 3.8
Escrevendosobaformamatricialtem‐se:
. 0, 3.9
Φ Φ ⋯ Φ Φ⋮ ⋱ ⋮
Φ Φ ⋯ Φ Φ, 3.10
e
V , … , V . 3.11

30
3.4. ModelagemMatemáticadoEFGM
NaformulaçãodoEFGM,umconjuntodeNnóséespalhadosobreodomíniodo
problema.Cadanó,I,éumponto r, z ∈ Ω,paraoqualafunçãodeforma,Φ ,é
associada.Então,afunçãodesconhecidaV podeseraproximadapor:
V V Φ , 3.12
emque éocoeficientedesconhecidodonóI.
Paraasoluçãodessaaproximaçãoénecessáriocalcularasfunçõesdeforma.De
acordocom[55],umbommétododeconstruçãodessasfunçõesdeveatenderalgumas
dasseguintespropriedades:
Distribuiçãonodalarbitrária;
Estabilidade;
Suportecompacto;
Eficiência;
Consistência;
Partiçãodaunidade;
PropriedadedodeltadeKronecker;
Compatibilidade;
Independêncialinear.
Existemváriastécnicasparaaconstruçãodasfunçõesdeformaecadaumagera
aproximações que satisfazem um certo conjunto dessas propriedades. Não há, até o
momento,ummétodoqueconsigasatisfazertodasaspropriedades.
NasSubseções3.4.1e3.4.2 sãoapresentadosdoismétodosutilizadosnoEFGM
paraaconstruçãodefunçõesdeforma:MLSeIMLS.
31
3.4.1. MétododosMínimosQuadradoMóveis‐MLS
OMétodo dos Mínimos Quadrados Móveis foi originalmente desenvolvido por
matemáticoscomoobjetivoderealizararegressãodedadoseoajustedesuperfícies
[62].Atualmente,oMLSéamplamenteutilizadoparaaconstruçãodasfunçõesdeforma
dosmétodossemmalha.Étidocomoummétodopopularporconstruirumafunçãode
aproximação contínua e suave em todo o domínio e por ser capaz de gerar uma
aproximaçãocomaordemdeconsistênciadesejada[6].
SejaV uma função contínuadefinidaemumdomínio fechadoΩ.A funçãode
aproximaçãolocaldeV emumponto ΩédenotadaporV , ,ondeoíndice
refere‐seàdiscretização.ParaométodoMLS,essaaproximaçãoédefinidaporumasérie
polinomialfinitadotipo[62]:
V , , 3.13
em que r, z é um ponto fixo arbitrário no domínio do problema analisado,
1, r, z… , é uma base polinomial completa de ordem e
, , … , são os coeficientes polinomiais a serem determinados
dependentesdaposiçãoespacialde .
Para garantir um mínimo de completude na aproximação, utiliza‐se
frequentemente bases polinomiais compostas por monômios de baixa ordem. No
presentetrabalhoutiliza‐seumabaselinearebidimensional,dadapor:
1, r, z . 3.14
OMLSassociacadaerroresidual V , V àfunçãojanela que
dependedadistânciaeuclidiana| |,detalformaqueasomadosquadradosdos
resíduosédadapor:
V V , , 3.15

32
em que é a função janela centrada no nó I,e refere‐se ao número de nós
envolvidosnaaproximaçãolocal.
SubstituindoaEquação(3.13)naEquação(3.15)obtém‐se:
V . 3.16
Idealmente deseja‐se que o erro residual seja zero. Para que isso ocorra é
necessáriodeterminaroscoeficientes ,deformaaresultarnamelhoraproximação
possível,istoé:
0. 3.17
Aminimizaçãode emrelaçãoa conduzàseguinteequação:
, , , 3.18
onde
, , 3.19
, , 3.20
V , V , … , V , 3.21
e
⋯
⋮ ⋱ ⋮⋯
, 3.22
⋯ 0
⋮ ⋱ ⋮0 ⋯
. 3.23
Substituindo(3.18)em(3.13),aaproximaçãolocalpodeserdefinidacomo:

33
V Φ , 3.24
emqueΦ éafunçãodeformadoMLSassociadaaonó ,dadapor:
Φ , , . 3.25
OMLS promove uma aproximação suave dos valores das funções entre os nós
espalhadosnodomíniodoproblema.AinfluênciadeumnóIemumponto édadapelo
suporte da função janela que, alémdisso, garante tambémque os nós entrem e
saiamdodomíniodesuportedemaneiragradual.
AfunçãodeformadefinidapelaEquação(3.25)apresentaumsuportecompacto
igual ao suporte da função janela, e ainda, a continuidade da função de forma e suas
derivadas dependem da continuidade da função janela e de suas derivadas [42]. As
derivadasespaciaisdeΦ podemserobtidasdaseguinteforma:
Φ , , , , , 3.26
emqueosubscrito, indicaaderivadaespacialeasnotaçõesreferentesaxea foram
retiradasparaumamelhorleituradaequação,sendoque:
, , , 3.27
e
, , . 3.28
O grau de consistência do MLS é garantido pela ordem da base polinomial
referenteàEquação(3.13)detalformaqueaaproximaçãotemconsistênciaiguala
[63]. Outra característica importante da aproximação pelo MLS é que as funções de
formageradasapartirdessemétodonãosatisfazemodeltadeKroneckerΦ 1,o
que resulta emV V , isto é, os parâmetros nodaisV não são iguais aos
valoresdafunçãoaproximadaV nosnós[6].Assim,a imposiçãodascondiçõesde
34
contornoessenciaissetornadifícil,demandandoautilizaçãodetécnicasadicionaispara
a sua imposição. Essa limitação pode ser solucionada utilizando o IEFGM, em que a
construção da função de forma é realizada pelo método IMLS, o qual atende a
propriedadedodeltadeKronecker[64].
3.4.2. MétododosMínimosQuadradoMóveisInterpolantes‐IMLS
OMétododosMínimosQuadradosMóveisInterpolanteséumaextensãodoMLS
quepermiteaconstruçãodefunçõesdeformaqueatendamaodeltadeKronecker.Para
tanto, o método utiliza funções janelas singulares, transformando a aproximante em
interpolante. Isso permite que as condições de contorno essenciais sejam impostas
diretamente no sistema discreto final. Além disso, em problemas que possuam
descontinuidades,essacaracterísticarepresentaumavantagem,poispermiteamelhoria
nosresultados.
UmexemplodefunçãojanelaquepodeserutilizadanométodoIMLSé[8]:
1
| |,
3.29
emque éumaconstanteparaoajustedaprecisãodosresultadose éumvalorreal
positivosuficientementepequenoparaevitaradivisãoporzero.
De acordo com [8], uma característica importante relacionada com a função
janela utilizada no método IMLS refere‐se ao modo como esta função age sobre a
esparsidade da matriz final. Apesar da função janela possuir um comportamento
assintótico,asfunçõesdeformaquelhessãoassociadaspossuemumsuportecompacto,
uma vez que os domínios de influência de cada nó são limitados, o que garante a
esparcidadedamatriz.
AFigura3‐4apresentaumexemplodefunçãojanela,emumadimensão,utilizada
no IMLS, com 5, 0,3e 1 10 , conformeaEquação (3.29).Para efeitode
comparação, nesta figura é apresentada tambéma função janela do tipo spline cúbica
utilizadanoMLS.Nestacomparaçãoas funçõessãoconsideradascentradasemumnó
posicionadoem 2.

35
Figura3‐4‐ComparaçãoentreasfunçõesjanelautilizadasnoMLSenoIMLS.
Observa‐seque,noponto 2a funçãosplinecúbicapossuiumvalor limitado
enquantoafunçãosingulartendeaoinfinito,essacaracterísticadafunçãoutilizadapelo
IMLSpossibilitaqueafunçãodeformaatendaapropriedadedodeltadeKronecker.Ambas
as funções, tendemazeroempontos localizados foradodomíniode influênciadonó.
Neste trabalho é utilizado o EFGM empregando o IMLS que, por isso, é chamado de
IEFGM.
3.5. IntegraçãoNumérica
Umadasdificuldadesencontradasaoseutilizarosmétodossemmalhabaseados
nométodo de Galerkin é amaneira como resolver numericamente a Equação (2.15).
Para a obtenção da solução dessa equação é necessário realizar uma integração
numéricaaolongodetodoodomíniodoproblema.AtécnicapropostaporBelytscko[7]
e utilizada neste trabalho para avaliar numericamente a forma fraca do problema
consistenaconstruçãodeumamalhaauxiliardenominadademalhadeintegração.Essa
malhadeintegraçãoéindependentedosnósedevecobrirtodoodomíniodoproblema,
incluindo as fronteiras. Para a solução numérica das integrais envolvidas, o presente
estudoutilizaatécnicadeQuadraturaGaussiana.
1.4 1.6 1.8 2 2.2 2.4 2.60
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Posição x
W (
x)
MLS
IMLS

36
3.6. CritériodeVisibilidade
Osmétodossemmalha,emgeral,promovemumaaproximaçãosuavedosvalores
das funções e suas derivadas, o que é conseguido a partir da continuidade da função
janela. Porém, para problemas com descontinuidades no domínio, essa característica
pode implicar erros na aproximação. Uma maneira de resolver esse problema é
introduzindo descontinuidades na própria função janela através do critério de
visibilidade,propostoporBelytschko[7].Técnicascomoessasãonecessárias,umavez
quenosmétodossemmalhaasregiõesondeaaproximação localéválidasãogeradas
durante o processamento, dificultando a imposição da condição de interface
diretamente.
O critério de visibilidade consiste em introduzir descontinuidades na função
janelaquandoa interfaceentreosmeiosforultrapassadapelosuportedafunção[42].
Por exemplo, seja o nóIlocalizado no Meio 1, com domínio de influência de raiod ,
conformemostradonaFigura3‐5(a).Seoraiod encontraaregiãocinza,odomíniode
influênciadonóIétruncado,eospontoslocalizadosnessaregiãonãosãoincluídosno
domíniodeinfluênciadonó,Figura3‐5(b).Essetruncamentoforçaafunçãojanelaaser
nula nos pontos que são excluídos, introduzindo assim, descontinuidades na função
janelaeconsequentementenafunçãodeforma[7].
Figura3‐5‐Demonstraçãodocritériodevisibilidade.(a)situaçãoanterioràaplicaçãodocritérioe(b)apósàaplicaçãodocritério.
3.7. ConsideraçõesFinais
Nestecapítuloforamapresentadasasprincipaiscaracterísticasdosmétodossem
malha, dando ênfase ao IEFGM. Para este método foi realizado todo o formalismo
NóI
Meio2
Meio1Descontinuidade
NóI
Meio2
Meio1
Meio2
(a) (b)

37
necessárioparaodesenvolvimentomatemáticodoproblemadeaterramentoemestudo.
Verificou‐sequeaimplementaçãodoIEFGMpassapordiversasetapas,quevãodesdea
obtençãodaformafracadiscretizadadoPVC,apartirdoMétododeGalerkin;àcriação
dafunçãodeformaapartirdoIMLS;eporfim,àintegraçãonuméricaparaaobtenção
dospotenciaisnosnósdistribuídosnodomíniodoproblema,utilizando‐seatécnicade
QuadraturaGaussiana.

38
Capítulo4
Resultados
4.1. Introdução
NestecapítulosãoapresentadososresultadosreferentesàaplicaçãodoIEFGMa
sistemas de aterramento elétrico. Para tanto, considera‐se uma configuração de
aterramentocompostaporumahasteverticalinseridaemsoloshomogêneosetambém
solos não homogêneos, estratificados em duas camadas horizontais. São obtidos os
potenciaisgeradosaoníveldosoloearesistênciadeaterramentoparaasconfigurações
consideradas.
Para a comparação dos resultados obtidos a partir do IEFGM é utilizado o
Software comercial SEGround desenvolvido pela NSA Consultoria e Informática Ltda.,
cujométodoimplementadoéoMoM[40].
A ferramenta computacional que implementa o IEFGM foi desenvolvida
utilizando‐se o ambiente MATLAB. Todas as simulações foram realizadas em um
microcomputadorInteli5,3,4GHze8GBdememóriaRAM.
4.2. AplicaçãodoMétodoIEFGMaoSistemadeAterramentoElétrico
4.2.1. DescriçãodoSistemadeAterramentoElétrico
ComoobjetivodeavaliarométodoIEFGMemaplicaçõesenvolvendosistemasde
aterramento considerou‐se inicialmente uma configuração de aterramento composta
por uma haste de comprimento Lh igual a 1 m, inserida verticalmente em um solo
homogêneo comresistividadeρ igual a1Ω.me submetidaauma tensãoVhde1V.O
domínio de simulação é truncado de maneira a assumir a forma de metade de um
semicírculo,comraioRDde10meovalordopotencialimpostonafronteiraΓ éde0V.
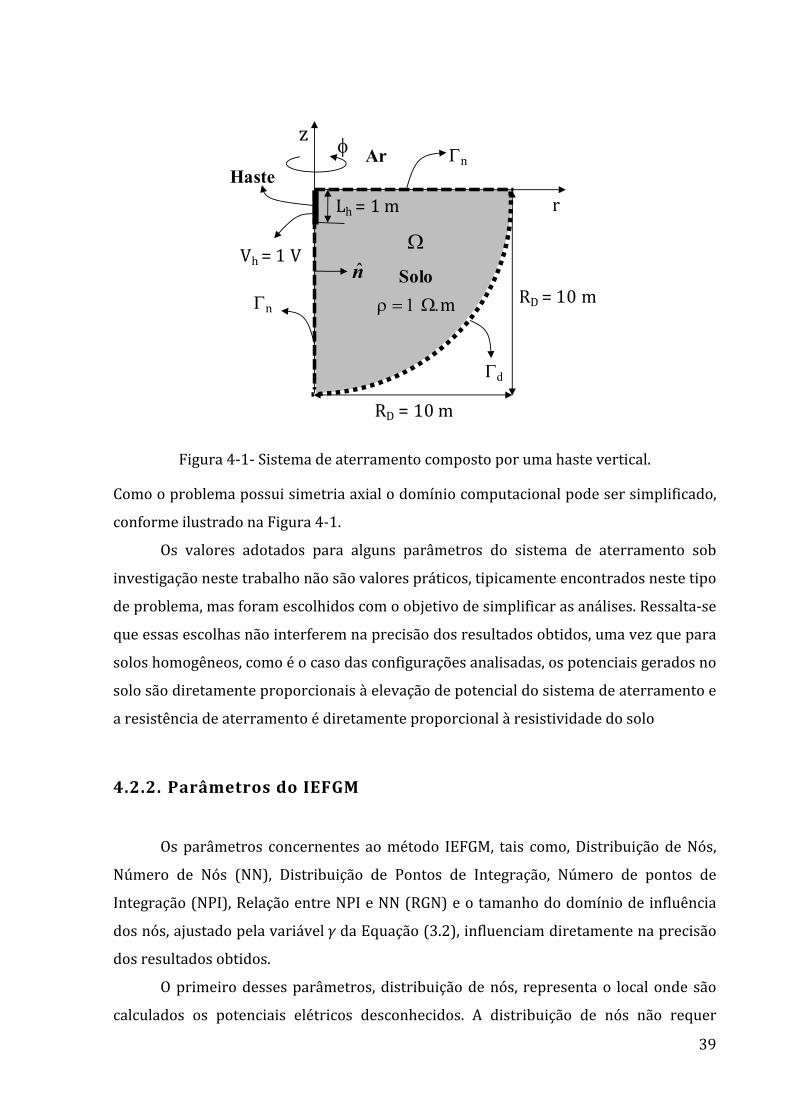
39
Figura4‐1‐Sistemadeaterramentocompostoporumahastevertical.
Comooproblemapossuisimetriaaxialodomíniocomputacionalpodesersimplificado,
conformeilustradonaFigura4‐1.
Os valores adotados para alguns parâmetros do sistema de aterramento sob
investigaçãonestetrabalhonãosãovalorespráticos,tipicamenteencontradosnestetipo
deproblema,masforamescolhidoscomoobjetivodesimplificarasanálises.Ressalta‐se
queessasescolhasnãointerferemnaprecisãodosresultadosobtidos,umavezquepara
soloshomogêneos,comoéocasodasconfiguraçõesanalisadas,ospotenciaisgeradosno
solosãodiretamenteproporcionaisàelevaçãodepotencialdosistemadeaterramentoe
aresistênciadeaterramentoédiretamenteproporcionalàresistividadedosolo
4.2.2. ParâmetrosdoIEFGM
Osparâmetros concernentes aométodo IEFGM, tais como,DistribuiçãodeNós,
Número de Nós (NN), Distribuição de Pontos de Integração, Número de pontos de
Integração(NPI),RelaçãoentreNPIeNN(RGN)eotamanhododomíniodeinfluência
dosnós,ajustadopelavariável daEquação(3.2),influenciamdiretamentenaprecisão
dosresultadosobtidos.
Oprimeirodessesparâmetros,distribuiçãodenós, representao localonde são
calculados os potenciais elétricos desconhecidos. A distribuição de nós não requer
n
n
d
Solo
Ar
r
RD =10m
Lh =1m
m RD=10m
n
Vh=1V
Haste
z

40
conectividade entre eles, é necessário apenas que essa distribuição cubra todo o
domínio do problema analisado e suas fronteirasΓ. Além disso, para que o método
consiga ter uma boa aproximação é importante que NN seja suficientemente grande,
capaz de descrever a variação da variável sob análise. A Figura 4‐2 apresenta um
exemplo de distribuição de nós retangular que é adotada para o problema de
aterramentosobestudo.
Figura4‐2‐Exemplodedistribuiçãodosnósnodomíniodoproblema.
Outro parâmetro importante para ométodo IEFGM refere‐se à distribuição de
pontos de integração. Esses pontos, também chamados de pontos de Gauss,
correspondem ao local onde é realizada a integração numérica e são gerados com o
auxílio de um arranjo de células de integração. Esse arranjo deve envolver todo o
domínio do problema e suas células são independentes dos nós distribuídos. A
Figura4‐3apresentaumexemplodemalhadefundoutilizadanoprocessodeintegração
numéricacomumconjuntode2x2pontosdeGaussparacadacélula.Ressalta‐sequeo
tamanho das células, bem como, a quantidade de pontos de Gauss por célula são
parâmetrosquepodemseralterados.
z
r
Nósemn
Nóssobreahaste
Nósemn
Nósemd
NósemΩ

41
Figura4‐3‐Exemplodedistribuiçãodospontosdeintegraçãonodomíniodoproblema.
Arazão(RGN)entreonúmerodepontosdeintegração,NPI,eonúmerodenós,
NN, é muito importante para a convergência do método. De acordo com [6], para
problemas2Dessarazãodevesermaiorque67%,paraqueaprecisãodosresultados
sejamantida.Essaregraéumrequisitonecessáriomasparaalgunscasos,nãoégarantia
de ser suficiente. Por isso, para cada problema, é necessário realizar uma análise da
RGN.
O tamanho do domínio de influência dos nós se relaciona diretamente com a
eficiênciaeaprecisãodométodosemmalha.Esseparâmetroindicaaquantidadedenós
envolvidanadeterminaçãodasoluçãoaproximadaaoredordeumdeterminadonó.Para
Viana[42],odomíniodeinfluênciadevevariarentre1,5a4vezesadistânciaentreos
nós.Aavaliaçãodessesparâmetrosrepresentaumaetapaimportantenabuscaporbons
resultadosebomdesempenhocomputacional.
4.3. CálculodoErro
Para a avaliação da consistência dos resultados obtidos a partir do modelo
desenvolvido utilizando o IEFGM, é realizada uma comparação entre esses resultados
comaquelesobtidoscomoMoM.Nessaavaliaçãoéconsideradooerropercentualmédio
r
z Céluladeintegração
PontodeGauss

42
( ,oerropercentualmáximo( )eoerropercentualrelativo( apartirdas
seguintesexpressões,respectivamente:
∑
. 100%,(4.1)
| |. 100%, (4.2)
| |
. 100%, (4.3)
em que corresponde à solução obtida pelo MoM, à solução obtida pelo
IEFGMe onúmerodepontosondeasoluçãoéavaliada.
4.4. ModelagemdoRaiodaHastedeAterramento
Uma característica importante sobre os métodos numéricos aplicados à
modelagem de sistemas de aterramento refere‐se a forma como o raio do eletrodo é
tratadoemcadaumdeles.Dadaaimportânciadessetema,nestaseçãoéfeitaumabreve
descriçãosobreaabordagemdesseparâmetropelosprincipaismétodosnuméricos.
Ressalta‐se que um mesmo método pode permitir mais de uma forma de se
considerar o raio do eletrodo. O FEM, por exemplo, aborda amodelagemdo raio dos
eletrodos de diversas formas. Uma delas consiste em considerar a discretização do
domínio,apartirdosvárioselementosfinitos,respeitandoasinterfacesentreregiõese
materiais distintos. Para os problemas que são tridimensionais, mas que apresentam
umasimetriaaxial,comoéocasodosistemadeaterramentocompostoporumahaste,o
FEM permite que seja feita uma abordagem bidimensional aplicando um fator de
correçãonaformulaçãonumérica,multiplicandoostermosdosistemadecadaelemento
por2 , emque éadistânciadobaricentrodoelementoaoeixoz.Umexemplode
trabalhoqueutilizaessaabordagempodeservistoem[65].Outraformadetrataroraio
apartirdoFEMconsisteemmodelaroeletrodoporumelemento“linha”,evitandoasua
discretização em elementos finitos. Os trabalhos [43], [44], [66] são alguns exemplos

43
que utilizam essa modelagem. A partir dessa proposta, novos trabalhos vêm sendo
realizadosdeformaaconsiderarascorrentesquefluemradialmentedoseletrodospara
osolo,[45],[67]exemplificamessecaso.
O MoM permite a representação do raio da haste de forma tridimensional,
entretanto, amodelagem émuito complexa, por isso, a representaçãomais adotada é
aquela em que a haste é discretizada em vários segmentos com comprimentosmuito
maiores que o raio, o que permite a aproximação por correntes filamentares. Nessa
modelagem o raio tem papel relevante no cálculo do acoplamento próprio dos
segmentos.Trabalhosqueutilizamessamodelagemsãoapresentadosem[36],[68].
Para a técnica sem malha, não foram encontrados na literatura trabalhos que
tratem da modelagem de hastes de aterramento. Assim, diante da importância da
representação desse elemento, é apresentado neste trabalho duas propostas para a
modelagem das hastes utilizando o IEFGM. A primeira delas é aqui denominada de
PropostaRaioReal (PRR)easegundadePropostaRaioEquivalente (PRE).Aseguiré
apresentada uma descrição de cada uma das referidas propostas que possuem em
comumofatodeseremaplicadasaumarepresentaçãobidimensionaldoproblema,dada
asuasimetriaaxial.
PropostaRaioReal(PRR):
Nestapropostaahastedeaterramentoémodeladaconsiderandosuasdimensões
reais a partir de sua seção transversal. Utilizando o IEFGM, são distribuídos nós
coincidentes com o contorno da haste, conforme indicado na Figura 4‐4 (a). A
distribuição de nós em Ω,Γ eΓ possui um espaçamento igual ao raio da haste de
aterramento,rh.
PropostaRaioEquivalente(PRE):
Estapropostaprevêamodelagemdahaste comoumelemento filamentar, cuja
áreasereduzaumalinhadenós.Nestecaso,paratodososnósdistribuídoséutilizado
umespaçamentomaiorquerh,ajustadode formaaalcançaraprecisãodesejada.Essa
representaçãofiliformedahastedeaterramentoéilustradanaFigura4‐4(b).Maiores
detalhessobreestapropostasãodescritosnaSeção4.9.

44
Figura4‐4‐Exemplodedistribuiçãodosnós.(a)PropostaRaioReal(PRR)e(b)PropostaRaioEquivalente(PRE).
4.5. SistemasdeAterramentoUtilizandoHastesVerticais
Existemumagamadediferentesconfiguraçõesdehastesdeaterramentoquanto
aocomprimento,raioematerialdisponíveisnomercado.Emrelaçãoaocomprimento,
osvaloresmaisutilizadossãoosde2,4me3m.Ashastespodemserdotipocantoneira
oudeseçãocircular.Paraestaúltima,asseçõesmaisutilizadassãode1/2”,5/8”,3/4”e
1”. Em relação aomaterial, as hastes podem ser de aço galvanizadoou aço cobreado.
Ressalta‐sequeasdimensõesdashastes,emgeral,sãolimitadasporquestõesmecânicas
tendoemvistaquequantomaiororaiodahastemaisdifícilsetornaasuacravaçãono
solo. Nas análises realizadas neste trabalho as hastes com diâmetros comerciais são
denominadasdehastesconvencionais.
A partir das hastes convencionais é possível projetar várias configurações de
aterramento.Umadessasconfiguraçõesconsisteemrevestir/encapsularumahastede
aterramento com um material de resistividade inferior à do solo circunvizinho,
formandoumcilindrocravadonosolo.Dopontodevistadereduçãodaresistênciade
aterramento, essa técnicaé tantomais eficazquantomaior for a resistividadedo solo
localequantomenorforaresistividadedomeioencapsulante.Supondoqueessemeio
tenha uma resistividade muito baixa em comparação ao solo circunvizinho pode‐se
z
r
Haste
rh
r
z
Haste
(a) (b)
Nósemn
Nósemn
Nósemd
NósemΩ
rh
rh
rh
Nósemd
NósemΩ
Nósemn
Nósemn>rh
>rh

45
considerarumsistemadeaterramentocujoraioéodocilindroformadopelomeioque
envolveahaste.Otamanhodesseraioévariávelenopresenteestudoconsidera‐seuma
faixadevaloresentre0,04me0,1m.ConfiguraçõescomoessasãoadotadaspelaCEMIG
em redes de distribuição de energia elétrica [69] e representa uma alternativa de
reduçãodaresistênciadeaterramento levando‐seemconsideraçãoosaltosvaloresde
resistividadedosolodoestadodeMinasGeraisearestriçãofísicaparaainstalaçãodo
aterramento.Essetipodeconfiguraçãodeaterramentoédenominadaaolongodotexto
dehastesencapsuladas.
4.6. AvaliaçãodoDomínioComputacionaldoProblema
ParaoproblemadeaterramentodescritonaSeção4.2.1érealizadaacomparação
entre os valores dos potenciais elétricos ao nível do solo obtidos com o IEFGM, com
aqueles obtidos a partir do MoM, ver a Figura 4‐5. Para esta análise o potencial na
fronteiraΓ é fixado em 0 V e na haste, o potencialV é 1 V. Utilizou‐se a PRR
considerando uma haste encapsulada com raio de 5 cm. Para a simulação NN foi de
31920eNPIde125653conduzindoaumaRGNde3,9.
Figura4‐5‐PotenciaisnoníveldosolocalculadoapartirdoIEFGMedoMoM.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
r (m)
Pot
enci
al (
V)
IEFGM
MoM

46
Observa‐sequeacurvadepotencialaoníveldosoloobtidapelométodoIEFGM
apresenta boa concordância com a obtida pelo MoM, na região próxima à haste,
entretanto,amedidaqueseafastadosistemadeaterramentoosvalorescomeçamase
diferenciar. A curva obtida pelo IEFGM apresenta uma taxa de decaimento bemmais
acentuadaqueacurvadoMoM.Adiferençaentreospotenciaspodeserquantificadaem
termosdoerro calculadoapartirdaEquação(4.1),queforneceumvalorbastante
elevadode49,23%.Essecomportamentose justificapelo fatode ter sido impostoum
potencial igual a zerona fronteiraΓ quandodautilizaçãodo IEFGM.Aindaquenesta
regiãoopotencialsejarealmentebaixocomparadocomospotenciaisdesenvolvidosno
entorno do sistema de aterramento, ele ainda não é nulo, o que se reflete
significativamentenosvaloresdoerrodepotencial.
4.6.1. PotencialnaFronteiraΓd
Para a solução de problemas abertos utilizando métodos diferenciais como o
IEFGMénecessáriotruncararegiãodeanálisedoproblemaporumafronteiradeforma
a limitar o tamanho do domínio computacional e impor uma condição de contorno
apropriada nessa fronteira. Essa ação impacta diretamente na precisão da solução do
problema.
Conceitualmente, a resistência de um sistema de aterramento corresponde à
quedade tensãototalnosoloporunidadedecorrente injetadanomesmo,apartirda
superfíciedoseletrodosatéoinfinito,ondeopotencialéefetivamentezero,quandose
fazcircularumacorrenteatravésdessesolo.Issosignificadizerqueafronteiraondeo
potencial é zero deve ter um tamanho infinito. Em termos práticos não é possível
incorporar essa condição em métodos diferenciais. Na realidade considera‐se uma
distânciasuficientementegrandeemrelaçãoaosistemadeaterramentoondepossaser
atribuído o potencial zero à fronteira. No entanto, essa aproximação ainda conduz a
errosnosresultados.
Paramelhoraraprecisãodasoluçãoereduziroserrosdepotenciaisnoníveldo
solosemelevarsobremaneiraocustocomputacionaldasimulaçãodevidoàextensãodo
domínio computacional do problema, neste trabalho propõe‐se uma nova abordagem

47
paraasoluçãodoproblemaapartirdautilizaçãodeumaaproximaçãoparaopotencial
nafronteiraΓ .
Aaproximaçãoérealizadaapartirdopotencialgeradoemumpontonoespaço
devido a uma corrente pontual, em detrimento de se impor um valor igual a zero. É
evidente que este não é o caso para o aterramento analisado, considerando a região
próximaaele;entretanto,quandoseconsideramdistânciasmaiores,essaaproximação
pode ser adotada e os potenciais nessa região podem ser calculados a partir de uma
expressãomatemáticafechada.
A equação que expressa o potencial em um dado ponto em relação ao infinito
devidoaumacorrentepontualédadapor:
Vρ I2 π D
, (4.4)
em queρé a resistividade do solo uniforme, I é a corrente que dispersa pelo
aterramentoeDéadistânciadopontoaosistemadeaterramento.Essaaproximaçãosó
éválidaparapontosdistantesdosistemadeaterramento,ondeasequipotenciaispodem
serassumidascomoaproximadamentehemisféricas, independentementedageometria
doarranjodeaterramento.
UmaformadeaplicaraEquação(4.4)aoproblema,consisteemrealizartambém
umaaproximaçãoparaaobtençãodovalordacorrentedefalta,I.Paratanto,considera‐
seaEquação(4.5)querepresentaaformulaçãoclássicadeSunde[2]paraocálculoda
resistênciadeaterramentodeumahaste.
Rρ2π
2 1 1 /2
21 /2 , (4.5)
emqueléocomprimentodahastedeaterramentoeaéoraiodahaste.
Apartirdaresistênciacalcula‐seacorrenteresultantenoaterramento,dadapela
relaçãoI V /R. De posse do valor da corrente, retorna‐se à Equação (4.4) para a
obtençãodopotencialaproximado.
AFigura4‐6apresentaosvaloresdoerrodepotencialelétricoaoníveldosolo
em função da distância ao aterramento, calculados a partir da Equação (4.3),
considerandoospotenciaisgeradospeloMoMeaquelesobtidoscomaEquação (4.4),

48
ondeDésubstituídoporrqueévariável.Paraessaavaliaçãoforamconsideradashastes
deaterramentode1mdecomprimentoinseridasemsolohomogêneocomasseguintes
configurações:
Hasteconvencionalderaiode0,00635m
Hasteencapsuladaemumcilindrocomraiode0,1m
Figura4‐6‐Erropercentualparaopotencialelétricoaoníveldosoloemfunçãodadistância.
Para ambasas configurações, observa‐sequeexisteuma regiãoondeo errode
potencial decresce rapidamente. Para a haste encapsulada essa região está
compreendida entre 0 e 1,5 m e para a haste convencional entre 0 e 3,9 m. Esse
comportamento decorre do fato dos potenciais calculados a partir da Equação (4.4)
apresentarem valores bem errôneos nas proximidades da haste, isso porque a
aproximação considerada, de fatonão é válidanessa região.A partir dessas regiões o
erroseestabilizaemvaloresinferioresa10%.Paraasduasconfiguraçõesapresentadas,
emdistânciasmaioresque5m,porexemplo,aaproximaçãodopotencialjáéválida.
A Figura 4‐7 apresenta um gráfico com as curvas equipotenciais em um plano
longitudinal ao sistema de aterramento para a haste encapsulada com raio de 0,1m,
obtidaapartirdoIEFGM,considerandoaindaopotencialiguala0VemΓ .
0 2 4 6 8 10 12 14 16 18 2010
-3
10-2
10-1
100
101
102
103
104
r (m)
Er
(%)
Haste convencional (raio = 0,00635 m)
Haste encapsulada (raio = 0,1 m)

49
Figura4‐7‐Curvasdeequipotenciaisnosoloespaçadasde0,01Vparaahasteencapsuladacomraio0,1m.
Observa‐se que as equipotenciais são hemisféricas na região mais afastada da
haste. Esse resultado corrobora com os resultados apresentados na Figura 4‐6, que
indicaqueparaestaconfiguraçãodeaterramento,autilizaçãodaaproximaçãoporuma
correntepontualéadequadaparadistânciasacimade5mdosistemadeaterramento.
Assim, a modelagem adotada neste trabalho considera a aproximação do
potencial emΓ , conforme discutido nesta seção. Para tanto utiliza‐se um domínio
computacional comraioR 10. L .ATabela4‐1apresentaosvaloresdospotenciais
elétricosemΓ calculadosapartirdaaproximaçãopropostanestaseção,chamadanesse
trabalho de Aproximação Proposta (AP), e os potenciais obtidos pelo MoM para as
hastesconvencionaiseencapsuladasdecomprimentoLh=1meraior .
r (m)
z (m
)
0 1 2 3 4 5 6 7 8 9 10-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
0,01 V
0,02 V
0,03 V
0,04 V

50
Tabela4‐1–PotencialemΓ .
r (m)V(V)MoM
V(V)AP
0,00635 0,019 0,0180,00794 0,019 0,0190,00953 0,020 0,0200,0127 0,021 0,0210,04 0,029 0,0280,05 0,031 0,0290,06 0,033 0,0310,07 0,035 0,0330,08 0,037 0,0340,09 0,038 0,0350,1 0,040 0,037
Observa‐sequeosvaloresdepotencialobtidosapartirdaaproximaçãoproposta
apresentaramboaconcordânciacomosvaloresgeradosapartirdoMoM.
Para o problema de aterramento inicialmente considerado, constituído de uma
haste de 1m de comprimento e raio de 5 cm, inserida em um solo homogêneo com
resistividade 1Ω.m, o potencial aproximado na fronteiraΓ comR 10mé de
0,029V,conformeindicadonaTabela4‐1.Utilizandoessaaproximaçãotem‐seacurva
depotencialaoníveldosoloparaoIEFGMconformeapresentadonaFigura4‐8.Nessa
figuraéapresentadotambémacurvadepotencialobtidopeloMoM.
Figura4‐8‐PotencialaoníveldosolocalculadoapartirdoIEFGMedoMoM.AproximaçãodopotencialelétricoemΓ .
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
r (m)
Pot
enci
al (
V)
IEFGM
MoM

51
AaproximaçãodopotencialnafronteiraΓ permitiuqueascurvasdepotenciais
doIEFGMedoMoMfossempraticamentecoincidentesoqueserefletenosvaloresdos
erros e ,conformeapresentadonaTabela4‐2.Nestatabelasãoapresentados
também os erros percentuais de potencial para outras configurações de haste de
aterramentoadotadasnestetrabalho.
Tabela4‐2– e paraopotencialaoníveldosolo–aproximaçãodopotencialelétricoemΓ .
r (m) % %0,00635 ‐ ‐0,00794 ‐ ‐0,00953 ‐ ‐0,0127 0,78 2,030,04 2,15 4,310,05 2,65 5,070,06 3,34 5,920,07 3,80 6,710,08 4,32 7,430,09 4,65 8,320,1 5,32 8,67
Conforme é discutido na Seção 4.7, para as configurações de aterramento com
hastes comerciais a modelagem adotada utilizando a PRR conduz a um custo
computacionalelevadodificultandoocálculodosparâmetrosdoaterramento.Porisso,
na Tabela 4‐2, não são apresentados os erros para as hastes com raios inferiores a
0,0127m.
4.7. CálculodaResistênciadeAterramento
A modelagem adotada neste trabalho considera o sistema de aterramento
alimentadoportensão;porisso,oqueseconheceinicialmenteéaelevaçãodepotencial
dosistemadeaterramento.Oprocessodeobtençãodovalordaresistênciadosistema
deaterramentopassapelocálculodacorrentequesedispersaparaosolo.Esseprocesso
decálculoérealizadodaseguinteforma:
Passo 1 – Cálculo do potencial nos nós utilizando o IEFGM: A partir da
soluçãodaformafracadoproblema,dadapelaEquação(2.15),obtém‐se
os valores do potencial elétrico nos nós distribuídos pelo domínio do
problema.

52
Passo2–Cálculodopotencialempontos :Nestaetapaédefinidauma
distribuiçãodepontosmaisrefinada.Sãocalculadosospotenciaisnesses
pontos a partir dos potenciais obtidos no Passo 1 utilizando a
Equação(3.4)(V ∑Φ V ).
Passo 3 – Escolha de uma equipotencial: A escolha da equipotencial é
muito importante para a boa convergência do resultado, pois influencia
diretamentenocálculodocampoelétrico.Aequipotencialescolhidadeve
apresentarumraiodecurvaturasuave.
Passo 4 – Definição de pontos de integração ao longo da equipotencial
escolhida.
Passo5–Cálculodomódulodocampoelétriconospontosdeintegração:
Essecálculoérealizadoapartirdaderivadadopotencialelétricoaolongo
daequipotencialescolhida,utilizandoaEquação(2.6).Umavezqueesse
procedimento é realizado a partir da solução numérica do potencial
elétrico, ele pode apresentar instabilidade. Para evitar esse tipo de
problema, o cálculo deve ser feito em uma região do domínio onde as
equipotenciais tem uma curvaturamais suave, o que geralmente ocorre
em uma região mais afastada do sistema de aterramento. A Figura 4‐9
apresenta o processo adotado para a busca de uma equipotencial
apropriada.Observa‐sequeem(a)aequipotencialestámaispróximado
sistemadeaterramento,assim,osvetoresdecampoapresentamnormae
direção bastante diferentes um dos outros. Não se pode dizer omesmo
comaequipotencial indicadaem(b).Devidoà suavidadedessacurvaos
vetores de campo são todos uniformes e ortogonais a ela. Essa
característicaconduzaumamaiorprecisãonocálculo.
Diantedoexposto,éimportantedestacarqueapesardamaiorvariaçãode
potencial ocorrer na região próxima ao sistema de aterramento,
implicando necessidade de uma distribuição de nós mais densa para
caracterizar bem essa variação, a região mais afastada do aterramento
também deve apresentar uma boa densidade de nós para que o cálculo
precisodadensidadedecorrente sejarealizado.
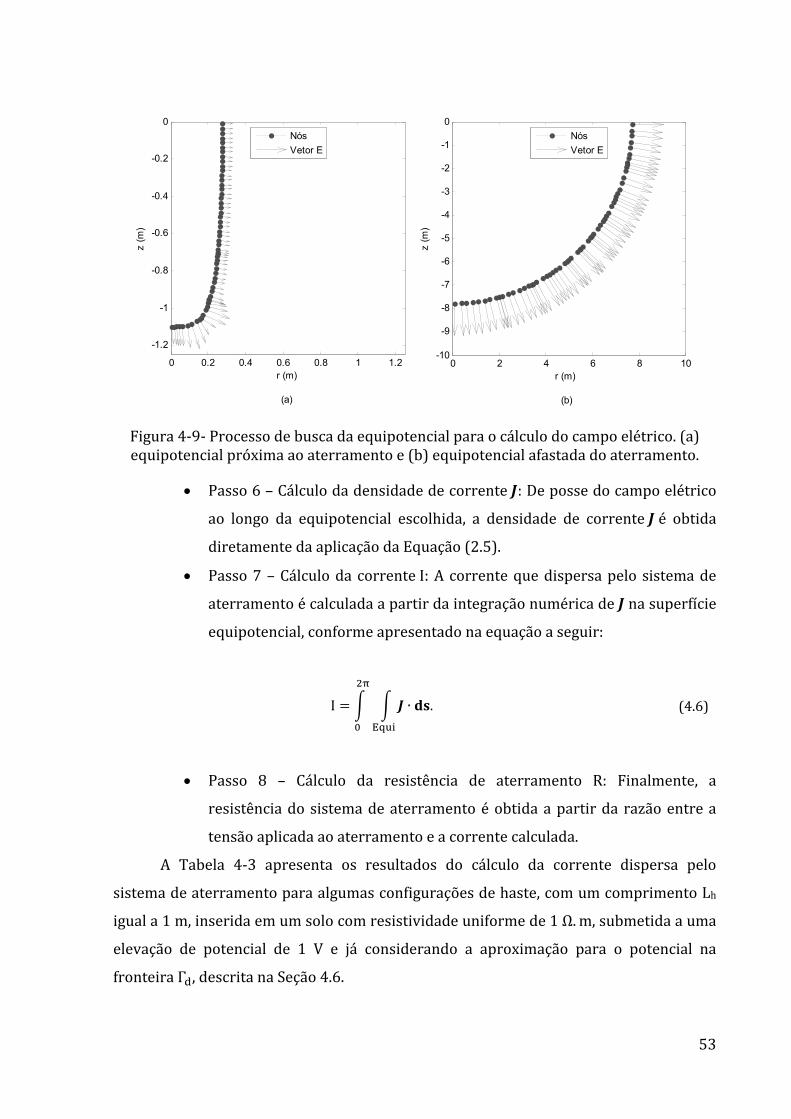
53
Figura4‐9‐Processodebuscadaequipotencialparaocálculodocampoelétrico.(a)equipotencialpróximaaoaterramentoe(b)equipotencialafastadadoaterramento.
Passo6–Cálculodadensidadedecorrente :Depossedocampoelétrico
ao longo da equipotencial escolhida, a densidade de corrente é obtida
diretamentedaaplicaçãodaEquação(2.5).
Passo7–CálculodacorrenteI:Acorrentequedispersapelo sistemade
aterramentoécalculadaapartirdaintegraçãonuméricade nasuperfície
equipotencial,conformeapresentadonaequaçãoaseguir:
I ∙ . (4.6)
Passo 8 – Cálculo da resistência de aterramento R: Finalmente, a
resistênciadosistemadeaterramentoéobtidaapartirda razãoentrea
tensãoaplicadaaoaterramentoeacorrentecalculada.
A Tabela 4‐3 apresenta os resultados do cálculo da corrente dispersa pelo
sistemadeaterramentoparaalgumasconfiguraçõesdehaste,comumcomprimentoLh
iguala1m,inseridaemumsolocomresistividadeuniformede1Ω.m,submetidaauma
elevação de potencial de 1 V e já considerando a aproximação para o potencial na
fronteiraΓ ,descritanaSeção4.6.
0 2 4 6 8 10-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
r (m)
(b)
z (m
)
Nós
Vetor E
0 0.2 0.4 0.6 0.8 1 1.2
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
r (m)
(a)
z (m
)
Nós
Vetor E

54
Tabela4‐3–Resultados–Distribuiçãouniformedenós.
r (m) I(A)IEFGM
R(Ω)IEFGM
V(V)emΓ
NN NPI Tempode
processamento(s)
R(Ω)MoM
0,0127 1,370 0,730 0,021 488974 1945807 1,5 195826 0,7420,04 1,833 0,546 0,028 49723 196351 1,5 2087 0,5510,05 1,960 0,510 0,029 31920 125653 1,5 760 0,5130,06 2,063 0,485 0,031 22245 87620 1,5 365 0,4830,07 2,184 0,458 0,033 16388 64248 1,5 205 0,4570,08 2,289 0,437 0,034 12587 49091 1,5 112 0,4340,09 2,386 0,419 0,035 9987 38707 1,5 70 0,4140,1 2,484 0,403 0,037 8114 31415 1,5 49 0,397
OsresultadosapresentadosnaTabela4‐3 indicamumaboaconcordânciaentre
osvaloresderesistênciadeaterramentoobtidosapartirdoIEFGMeosvaloresgerados
peloMoM.ParaoscasossimuladosoparâmetroRGNquerepresentaarelaçãoentreo
númerodepontosdeintegraçãoeonúmerodenósédeaproximadamente3,9.
Dentreashastesconvencionais,sãoapresentadososresultadosapenasparaade
raioiguala0,0127m.Comopodeserobservado,paraestecaso,ocustocomputacional
foibastanteelevadooque inviabilizouaanálisedeconfiguraçõesdehastescomraios
inferioresaesse,utilizandoamodelagemPRR.
A utilização de uma distribuição de nós uniforme garante um bom
comportamento do método IEFGM; entretanto, do ponto de vista do custo
computacional,tornaproibitivaaanálisedehastesdeaterramentocomraiospequenos.
Uma alternativa para este problema consiste na análise da utilização de distribuições
nãouniformesdosnós.
4.8. AvaliaçãodaDistribuiçãonãoUniformedeNós
Seguindo a estratégia já adotadapelosmétodos commalha, de se discretizar o
domínio do problema tanto quanto maior for a variação da variável analisada, nesta
seçãoavalia‐seoimpactodautilizaçãodessaestratégiaapartirdométodoIEFGM.
Comautilizaçãodeumadistribuiçãonãouniformedenósespera‐seumaredução
significativanotempocomputacional;noentanto,esseprocedimentonãoégarantiade
obtenção de resultados precisos, uma vez que uma distribuição de nós realizada de
maneirainadequadapodedegradarasoluçãodoproblema.

55
Em métodos diferenciais como o FEM, por exemplo, utilizam‐se malhadores
comerciais para gerar e processar os elementos. No caso dos métodos semmalha, a
utilização de rotinas similares às utilizadas pelos malhadores também é uma prática
usual.Umexemplodautilizaçãodemalhadoresparaageraçãodosnósemmétodossem
malhapodeserencontradoem[8].
O que é realizado neste trabalho é uma avaliação tanto do ponto de vista de
resultado, quanto do ponto de vista do custo computacional, da utilização de
distribuições não uniformes obtidas de maneira simplificada, sem a utilização de
malhadores. Essa avaliação é realizada considerando‐se algumas configurações de
distribuiçãodenósconformeparâmetrosindicadosnaFigura4‐10.
Figura4‐10‐Distribuiçãonãouniformedenós.
O parâmetro representa um fator de proporcionalidade em relação aR que
defineo tamanhodo raioda região1, por sua vez, é um fatordeproporcionalidade
para adeterminaçãodoespaçamentodosnósda região2 em funçãodoespaçamento
dosnósdaregião1.Seja 0,2e 2,porexemplo;essaconfiguração indicaquea
região1possuiumraio0,2vezesoraiododomíniototaldoproblemaeoespaçamento
entreosnósdaregião2éodobrodoespaçamentodosnósdaregião1.Arepresentação
dahasteéfeitaconformeaPRR,assim,naregião1oespaçamentoentreosnóséigualao
raiodahaste,rh.
r
z
RDαRD
Haste
Região2
Região1
βrhrh
RD
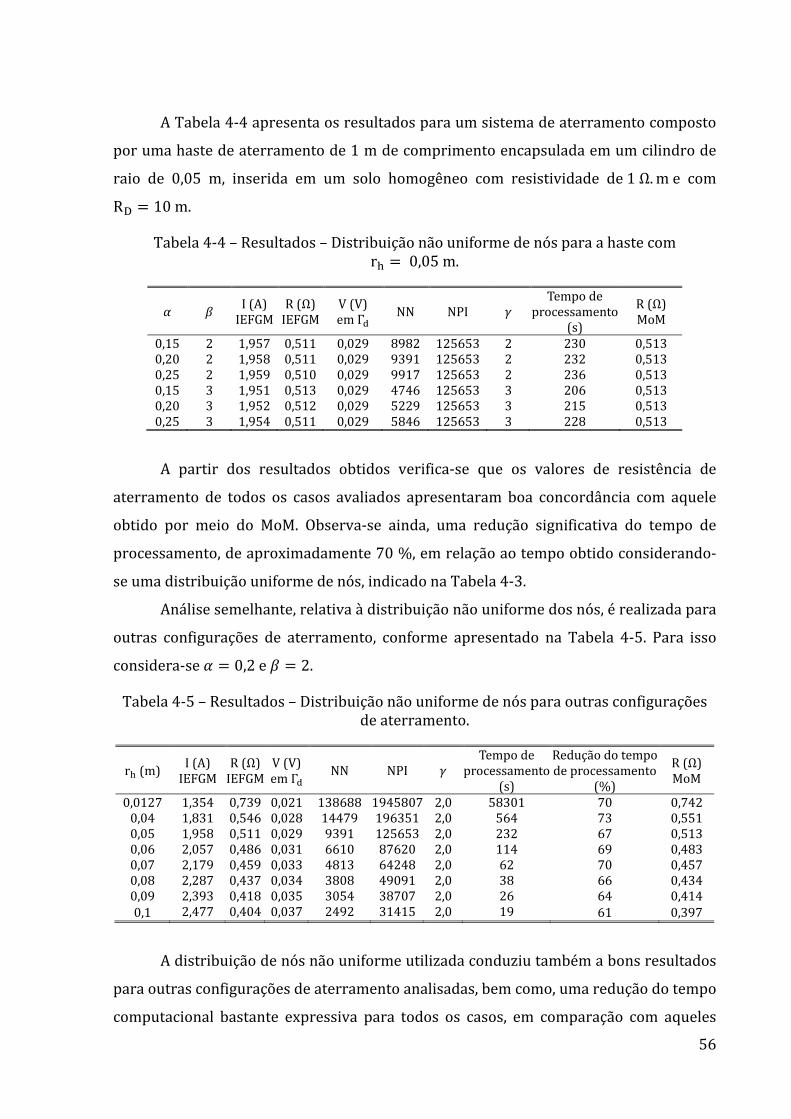
56
ATabela4‐4apresentaosresultadosparaumsistemadeaterramentocomposto
porumahastedeaterramentode1mdecomprimentoencapsuladaemumcilindrode
raio de 0,05 m, inserida em um solo homogêneo com resistividade de1Ω.me com
R 10m.
Tabela4‐4–Resultados–Distribuiçãonãouniformedenósparaahastecomr 0,05m.
I(A)IEFGM
R(Ω)IEFGM
V(V)emΓ NN NPI
Tempodeprocessamento
(s)
R(Ω)MoM
0,15 2 1,957 0,511 0,029 8982 125653 2 230 0,5130,20 2 1,958 0,511 0,029 9391 125653 2 232 0,5130,25 2 1,959 0,510 0,029 9917 125653 2 236 0,5130,15 3 1,951 0,513 0,029 4746 125653 3 206 0,5130,20 3 1,952 0,512 0,029 5229 125653 3 215 0,5130,25 3 1,954 0,511 0,029 5846 125653 3 228 0,513
A partir dos resultados obtidos verifica‐se que os valores de resistência de
aterramento de todos os casos avaliados apresentaram boa concordância com aquele
obtido por meio do MoM. Observa‐se ainda, uma redução significativa do tempo de
processamento,deaproximadamente70%,emrelaçãoaotempoobtidoconsiderando‐
seumadistribuiçãouniformedenós,indicadonaTabela4‐3.
Análisesemelhante,relativaàdistribuiçãonãouniformedosnós,érealizadapara
outras configurações de aterramento, conforme apresentado na Tabela 4‐5. Para isso
considera‐se 0,2e 2.
Tabela4‐5–Resultados–Distribuiçãonãouniformedenósparaoutrasconfiguraçõesdeaterramento.
r (m)I(A)IEFGM
R(Ω)IEFGM
V(V)emΓ
NN NPI Tempode
processamento(s)
Reduçãodotempodeprocessamento
(%)
R(Ω)MoM
0,0127 1,354 0,739 0,021 138688 1945807 2,0 58301 70 0,7420,04 1,831 0,546 0,028 14479 196351 2,0 564 73 0,5510,05 1,958 0,511 0,029 9391 125653 2,0 232 67 0,5130,06 2,057 0,486 0,031 6610 87620 2,0 114 69 0,4830,07 2,179 0,459 0,033 4813 64248 2,0 62 70 0,4570,08 2,287 0,437 0,034 3808 49091 2,0 38 66 0,4340,09 2,393 0,418 0,035 3054 38707 2,0 26 64 0,4140,1 2,477 0,404 0,037 2492 31415 2,0 19 61 0,397
Adistribuiçãodenósnãouniformeutilizadaconduziutambémabonsresultados
paraoutrasconfiguraçõesdeaterramentoanalisadas,bemcomo,umareduçãodotempo
computacional bastante expressiva para todos os casos, em comparação com aqueles

57
resultadosquandoseutilizouumadistribuiçãouniformedenós.Entretanto,adespeito
dessa redução, verifica‐se que a análise de hastes convencionais ainda constitui uma
tarefalaboriosa,poisocustocomputacionalaindaassiméelevado.
Como intuitode tornarpossívela análisedehastes convencionaisutilizandoo
IEFGM,éapresentado,naSeção4.9,umaproposta,decaráterinovador,queexploraas
característicasdométodoutilizandoumahastederaioequivalente.
4.9. PropostadeRepresentaçãodeHastesConvencionais
Conformejádiscutido,odomíniodeinfluênciadeumnóconstituiumparâmetro
muitoimportanteparaosmétodossemmalha,umavezqueelerepresentaaregiãona
qual um determinado nó exerce sua influência, sendo, portanto, um parâmetro de
refinamento da solução. Considerando essa característica dos métodos sem malha,
vislumbrou‐se a possibilidade de explorá‐la de uma forma inovadora propondo uma
maneiraderepresentarashastescomraioscomerciaisapartirdoIEFGM.Assim,para
essa análise a haste é modelada como um elemento unidimensional, ou seja,
diferentemente damodelagem adotada até omomento, onde a haste é considerada a
partirdeseuprópriocontorno,nestecasoelaérepresentadaporumfilamento.Oraioé
considerado a partir do ajuste do tamanho do domínio de influência dos nós que
compõemosegmentoquerepresentaahastedeaterramento.
Para estabelecer o tamanho ideal dos domínios de influência dos nós que
representamahasteressalta‐sequenãoésuficienteutilizardomíniosdeinfluênciacom
dimensãoigualaoraiodahastequesedesejasimular.Otamanhodessesdomíniosfoi
estabelecido de forma empírica comparando os resultados obtidos a partir do IEFGM
com os resultados do MoM e foram introduzidos os parâmetros FR e FH conforme
Equações(4.7)e(4.8).
ó . . , 4.7
ó . , 4.8

58
emque correspondeaodomíniodeinfluênciadosnósdahastee ó aodomínio
deinfluênciadosdemaisnós, eFHsãofatoresparaoajustedotamanhodosdomínios
de influência, FRé um fator para a determinação do espaçamento entre os nós e ,
denominada de distância nodal, é consideradanesta proposta como sendoum fator cujo
valor é igual ao raio da configuração de aterramento adotada (haste convencional ou
encapsulada).
A Equação (4.7) representa o domínio de influência de todos os nós, exceto os
localizadosnahastedeaterramento.Paraessesnós,odomíniodeinfluênciaédadopela
Equação (4.8). Um destaque deve ser dado à relação direta entre as duas equações,
quantoaodomíniodeinfluênciaconsideradoatéomomento,tantoparaasdistribuições
denósuniformequantonãouniformes,anovidadeéoparâmetroFRquemultiplicado
por ,cujovaloréigualaoraiodahaste,indicaoespaçamentoentreosnósespalhados
pelodomíniodoproblema.Esseparâmetropodeexcursionarporumaextensafaixade
valores,entretanto,paraqueaabordagemconsigautilizarasuapotencialidade,valores
acima de 3 são preferencialmente adotados, lembrando‐se que, valores altos podem
conduzir a uma degradação da solução devido ao número reduzido de nós para a
solução do problema. Por outro lado, valores pequenos para este parâmetro podem
oneraroprocessamento.
OparâmetroFH,porsuavez,relaciona‐secomodomíniodeinfluênciadosnósda
haste.ConformepodeserobservadopelaEquação(4.8)odomíniodeinfluênciadosnós
dahasteédadoporumafraçãododomíniodeinfluênciadosoutrosnós.
A partir de vários testes verificou‐se que determinadas combinações entre os
parâmetros FReFHconduziam a bons resultados de potenciais no solo e resistência
paraasconfiguraçõesdeaterramentoconsideradas,e,que,otempodeprocessamentoé
bemmenorcomparadocomamodelagemPRRapresentadanestetrabalho.Emespecial,
valedestacarqueparatodasashastesconvencionais,foipossívelrealizarocálculodos
parâmetrostípicosdeprojetodeaterramento.
Salienta‐se que, provavelmente existem várias combinações entre FHeFRque
conduzem a resultados concordantes com o MoM. Entretanto, para tal análise seria
necessário utilizar uma otimização multiobjetivo, que foge do escopo deste trabalho.
Umadascombinaçõesobtidasapartirdostestesqueretornouresultadossatisfatóriose
que por isso, é adotada no estudo é a utilização deFR=10 e FH=0,805. A Tabela 4‐6

59
apresentaosresultadosparaashastesconvencionais,considerandoLh=1m,Vh=1V,
ρ=1Ω.meRD=10m.
Tabela4‐6–ResultadosIEFGM–PREparaashastesconvencionais.
r (m)I(A)IEFGM
R(Ω)IEFGM
FH FR NN NPI Tempode
processamento(s)
R(Ω)MoM
0,00635 1,172 0,853 0,805 10 19885 77917 1,5 290 0,8560,00794 1,224 0,817 0,805 10 12786 49828 1,5 112 0,8200,00953 1,255 0,797 0,805 10 8915 34592 1,5 56 0,7900,0127 1,369 0,730 0,805 10 5069 19473 1,5 20 0,742
Os resultados indicaram erros inferiores a 1,6%, utilizando a Equação (4.3),
comparando‐seosvaloresderesistênciadeaterramentodoIEFGMcomaquelesobtidos
peloMoM.Issorepresentaumaboaconcordânciaentreosmétodos.Alémdisso,destaca‐
seotempodeprocessamentobastantereduzidoobtidocomessamodelagem.
Apesar destamodelagem ter sido proposta para resolver o problema do custo
computacional elevado ao se simular hastes convencionais, ela também pode ser
aplicadaàproblemasdeaterramentocomhastesencapsuladas.
Inicialmente, considerou‐se para as hastes encapsuladas a mesma combinação
paraosparâmetros e adotadosparaashastesconvencionais.Noentanto,ainda
que os resultados tenham sido aceitáveis para fins de aterramento, com erros de até
13% calculados a partir da Equação (4.3), observou‐se uma maior probabilidade de
ocorrência de instabilidadenas respostas, uma vez que a quantidade de nós fica bem
reduzida. Uma alternativa para essa questão foi a de se utilizar uma combinação de
valoresdiferentesparaa configuraçãodehasteencapsulada, comFR=5eFH=1,3.Os
resultadosobtidossãoapresentadosnaTabela4‐7.
Tabela4‐7–ResultadosIEFGM–PREparaashastesencapsuladas.
r (m)I(A)IEFGM
R(Ω)IEFGM FH FR NN NPI
Tempodeprocessamento
(s)
R(Ω)MoM
0,04 1,870 0,535 1,3 5 2090 7859 1,5 4,9 0,5510,05 2,020 0,495 1,3 5 1357 5025 1,5 2,8 0,5130,06 2,164 0,462 1,3 5 963 3495 1,5 1,9 0,4830,07 2,314 0,432 1,3 5 715 2564 1,5 1,7 0,4570,08 2,468 0,405 1,3 5 552 1969 1,5 1,2 0,4340,09 2,655 0,377 1,3 5 450 1549 1,5 0,9 0,4140,1 2,790 0,358 1,3 5 364 1258 1,5 0,8 0,397

60
Os resultados obtidos também foram satisfatórios para os sistemas de
aterramento com haste encapsulada, com erros de resistência, crescente com o
aumentodoraiodahaste,masnãoultrapassando10%,paraosistemadeaterramento
commaiorraio.Essatendênciajáeraesperadadevidoàreduçãodaquantidadedenós
nodomíniodoproblemaàmedidaqueotamanhodoencapsulamentoaumenta.
Para todos os casos considerados nesta seção, a redução do tempo de
processamento só foi possível devido à diminuiçãoda quantidadedenós distribuídos
pelodomíniodoproblema.Entretanto,éimportanteressaltarqueessadiminuiçãodeve
ser feita de forma a manter um compromisso entre o tempo de processamento e a
garantia de uma boa solução.Mesmo que ométodo conseguisse calcular as variáveis
desejadas, apresentandovalores aceitáveisde errodepotencial elétrico, uma redução
significativa dos nós inviabilizaria a construção de uma equipotencial com curvatura
suaveparacalcularacorrentequedispersapelosistemadeaterramento.
4.10. EstudodeCasoSoloHomogêneo
DiantedoobjetivodeapresentarodesempenhodométodoIEFGMaplicadoaos
sistemas de aterramentos inseridos em solos uniformes, foram utilizados até o
momento,algunsparâmetrosmaissimplificadores,taiscomocomprimentodahastede
1 m, tensão aplicada de 1 V e resistividade do solo de 1 Ω.m, que demonstraram a
precisãodoIEFGMparaessetipodeproblema.
Embora, do ponto de vista numérico, a variação da resistividade do solo e da
tensãoaplicadaaosistemadeaterramentonãoimpliquemmudançasnuméricas,nesta
seçãoéapresentadaumaanálisedeumsistemadeaterramentocomparâmetrostípicos
utilizando a proposta de modelagem PRE com 0,805e 10. Para tanto,
considera‐se uma haste de aterramento de comprimento 2,4 m e raio 0,00953 m
(correspondente a seçãode¾”), inseridaemumsolo de resistividadede1000Ω.me
submetidaaumatensãode1kV.
Os resultados numéricos obtidos a partir do IEFGM para esta configuração de
aterramentosãoapresentadosnaTabela4‐8eosresultadosgráficossãoapresentadosa
partirdaFigura4‐11atéaFigura4‐14.

61
Umacomparaçãoentreovalorderesistênciadeaterramentoobtidoapartirdo
IEFGM com aquele obtido pelo MoMmostra boa concordância, caracterizada por um
desvioinferiora1%.
O tempo de simulação pode ser considerado aceitável, uma vez que o domínio
computacional adotado possui um raio RD = 24 m, calculado a partir da expressão
RD=10.Lh,estabelecidanesteestudoparacalcularotamanhododomíniodesimulação
doscasosanalisados.
Tabela4‐8–ResultadosIEFGM–Casoreal.
I(A)IEFGM
R(Ω)IEFGM
V(V)emΓ FH FR NN NPI
Tempodeprocessamento
(s)
R(Ω)MoM
2,593 385,607 16,90 0,805 10 50462 199236 1,5 1673 388,093
Figura4‐11‐Potenciaisaoníveldosolo.
0 5 10 15 20 250
100
200
300
400
500
600
700
800
900
1000
r (m)
Pot
enci
al (
V)
IEFGM
MoM
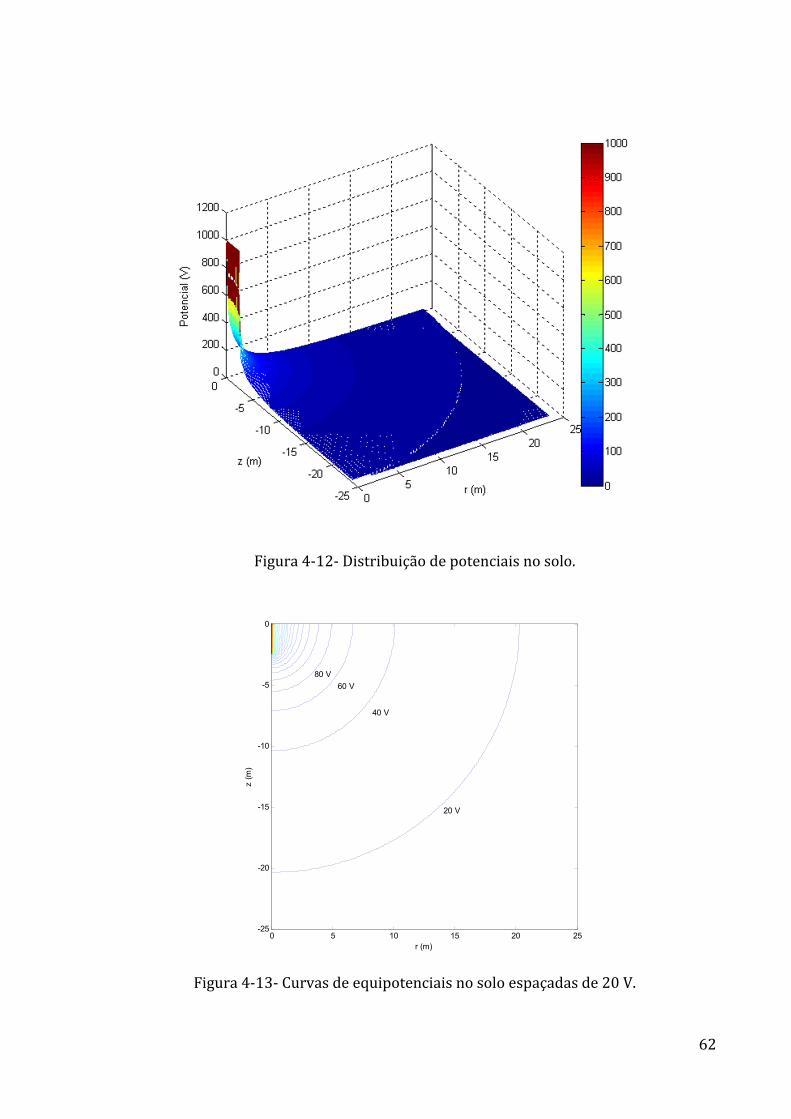
62
Figura4‐12‐Distribuiçãodepotenciaisnosolo.
Figura4‐13‐Curvasdeequipotenciaisnosoloespaçadasde20V.
r (m)
z (m
)
0 5 10 15 20 25-25
-20
-15
-10
-5
0
80 V
60 V
40 V
20 V

63
Figura4‐14‐Distribuiçãodecampoelétriconosolo.
4.11. EstudodeCasoSoloHeterogêneo
O solo no qual fica imerso o sistema de aterramento, normalmente, apresenta
umacaracterísticanãohomogênea,comvariaçõesderesistividadecomaprofundidade.
Por isso, é importante que as análises realizadas a partir do IEFGMpara sistemas de
aterramento inseridos em solos homogêneos sejam estendidas para os solos não
homogêneos.Nestaseçãosãoabordadosaspectosimportantesrelativosàaplicaçãodo
IEFGM ao problema de aterramento elétrico inserido em um solo não uniforme
estratificadoemcamadas.
Para esta análise, considera‐se uma configuração de aterramento conforme
apresentadonaFigura4‐15, compostaporumahastedeaterramento inseridaemum
solo estratificado em duas camadas horizontais. A haste é representada a partir da
proposta PRR considerando‐se uma configuração do tipo encapsulada comr igual ao
raio do cilindro encapsulante e igual a 0,05m. O problema de aterramento analisado
possui as seguintes características: Lh = 1 m, Vh = 1 kV, RD = 10 m,ρ 1000Ω.m,

64
Figura4‐15‐Sistemadeaterramentocompostoporumahasteinseridoemumsoloestratificadoemduascamadas.
ρ 300Ω.m,d1=3m,d2=7m,sujeitasàscondiçõesdecontornonas fronteirasde
Neumann,Γ , e Dirichlet,Γ , e condições de interface emΓ . Para o tratamento da
interfaceentre as camadasdo solo comresistividadesdistintasutiliza‐seo critériode
visibilidade.
Osvaloresadotadosparaosparâmetrosdosistemadeaterramentosobestudo
têmcomoobjetivopromoverumaanálisedaviabilidadedaaplicaçãodoIEFGMtambém
em solos com características não uniformes. Para isso buscou‐se definir uma
configuração de aterramento com valores tipicamente encontrados nesse tipo de
problema.Aestratificaçãodosolo,porexemplo,foiestabelecidadeformaacontemplar
umsolocomcamadasderesistividadebemdistintasentresi.
Na seção 4.6.1 foi desenvolvida uma metodologia baseada em uma análise
analíticaparaocálculodopotencialnafronteiraΓ paraocasodesoloshomogêneos.O
mesmoconjuntodeequaçõesempregadonessasituaçãonãopodeseraplicadonocaso
de solos heterogêneos, uma vez que o potencial ao longo da fronteira varia. A
metodologia adotada deve ser modificada e estendida para esse tipo de problema,
empregandooMétododasImagens.
Para o problema em análise, os potenciais emΓ foram obtidos a partir do
Software SEGround, que indicou uma pequena variação, com 11 V, ao nível do solo,
n
n
d
z
1ª Camada
Ar
r
RD
Lhρ1
RDn
Vh
Haste
2ª Camadaρ2
d1
d2
b

65
chegando a 10 V, no extremo oposto da fronteira. Esse comportamento se altera de
acordo com a estratificação do solo adotada, ou seja, com os valores deρ ,ρ ed
utilizados.Nopresentecaso,paraaavaliaçãodospotenciaisdesenvolvidosaoníveldo
soloapartirdoIEFGM,utilizou‐seumúnicovalordepotencialemΓ ,iguala11V.
A Figura 4‐16 apresenta a curva de potencial ao nível do solo obtida com o
IEFGM. Para comparação, nesta figura é apresentada também a curva de potencial
obtidaapartirdoMoM.Observa‐seumaboaconcordânciaentreascurvasdepotencial
noníveldosolo.Adiferençaentreosvaloresdepotenciais,quantificadaemtermosdo
erro e , é de 0,3% e 1,8%, respectivamente, confirmando‐se assim, a
consonânciaentreosresultados.
Figura4‐16‐Potenciaisaoníveldosolo.
NaFigura4‐17éapresentadoummapeamentodascurvasequipotenciaisnosolo
em um plano longitudinal ao sistema de aterramento em estudo. Com a variação da
resistividadedosolo,adispersãodecorrenteporelesealtera,oquerefletenoformato
das equipotenciais. Conforme pode ser observado nessa figura, o comportamento das
equipotenciaissealteramaomudardecamada.
0 1 2 3 4 5 6 7 8 9 100
100
200
300
400
500
600
700
800
900
1000
r (m)
Pot
enci
al (
V)
IEFGM
MoM
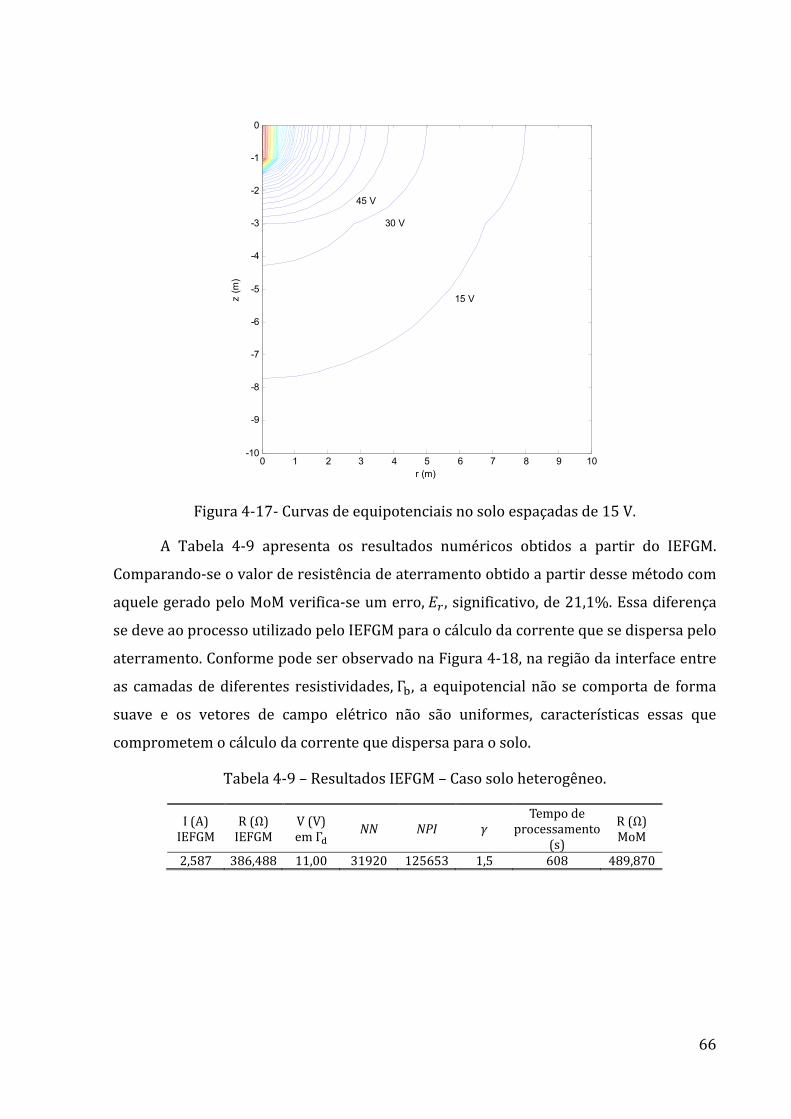
66
Figura4‐17‐Curvasdeequipotenciaisnosoloespaçadasde15V.
A Tabela 4‐9 apresenta os resultados numéricos obtidos a partir do IEFGM.
Comparando‐seovalorderesistênciadeaterramentoobtidoapartirdessemétodocom
aquelegeradopeloMoMverifica‐seumerro, ,significativo,de21,1%.Essadiferença
sedeveaoprocessoutilizadopeloIEFGMparaocálculodacorrentequesedispersapelo
aterramento.ConformepodeserobservadonaFigura4‐18,naregiãodainterfaceentre
as camadasdediferentes resistividades,Γ , a equipotencialnão se comportade forma
suave e os vetores de campo elétrico não são uniformes, características essas que
comprometemocálculodacorrentequedispersaparaosolo.
Tabela4‐9–ResultadosIEFGM–Casosoloheterogêneo.
I(A)IEFGM
R(Ω)IEFGM
V(V)emΓ
NN NPI Tempode
processamento(s)
R(Ω)MoM
2,587 386,488 11,00 31920 125653 1,5 608 489,870
r (m)
z (m
)
0 1 2 3 4 5 6 7 8 9 10-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
30 V
45 V
15 V

67
Figura4‐18‐EquipotencialparaocálculodacorrenteIparaocasodesoloheterogêneo.
OobjetivodestaseçãofoidemonstraraviabilidadedoIEFGMparaaplicaçãoem
problemasdeaterramento inseridosemsolosnãohomogêneos.Os resultadosobtidos
depotencialeatémesmoderesistênciadeaterramentodemonstraramessaviabilidade.
Paraqueométodosejautilizadonessetipoconfiguraçãodosoloénecessárioampliara
metodologia desenvolvida para o cálculo do potencial elétrico emΓ e aprimorar a
técnicaparaocálculodacorrentequesedispersaparaosolo.
4.12. ConsideraçõesFinais
Nestecapítuloforamapresentadosaspectosparticularesreferentesàanálisedo
sistema de aterramento elétrico utilizando o método IEFGM. Esses aspectos estão
relacionadoscomarepresentaçãodahastedeaterramentoeashipótesesadotadaspara
melhorarasoluçãoereduzirocustocomputacionaldoproblema.Foramapresentados
osresultadosdedistribuiçãodepotencialeresistênciaobtidosapartirdaaplicaçãodo
IEFGMasistemasdeaterramentocompostoporhastesconvencionaiseencapsuladas,
inseridas em solos homogêneos. Os resultados foram comparados com os valores
obtidoscomoMoM.Porfim,foiapresentadaumaanálisedeumahastedeaterramento
0 1 2 3 4 5 6 7 8 9 10 11-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
r (m)
z (m
)
Nós
Vetor E

68
inseridaemumsoloestratificadoemduascamadas.Apartirdessaanálise foipossível
obterospotenciaisaoníveldosolo,demonstrandoaviabilidadedousodoIEFGMpara
essetipodeaplicação.

69
Capítulo5
Conclusões
5.1. Introdução
Conforme mencionado no Capítulo 1, os MM aplicados a problemas
eletromagnéticos possuem um histórico recente quando comparado com técnicas já
bastanteestabelecidascomooMoMeoFEM.Apartirdodesenvolvimentodediversos
trabalhosaolongodessesúltimosanos,atécnicasemmalhatemsemostradobastante
apropriada para lidar com geometrias complexas e com não homogeneidades. Essas
características motivaram a sua aplicação, nesta dissertação, a problemas de
aterramento. Destaca‐se que essa proposta foi desafiadora uma vez que não foram
encontradostrabalhosnaliteraturaabordandooassunto.
A escolha do tema aterramento foi realizada devido à sua relevância no
desempenho dos sistemas elétricos. Assim, no Capítulo 2 foi realizado um estudo das
principaiscaracterísticaseparâmetrosrelacionadoscomaterramentos,dentreosquais
sedestacama resistênciadeaterramentoeadistribuiçãodepotenciaisnosolo.Esses
parâmetros foram utilizados para avaliar a precisão do modelo desenvolvido. Foi
apresentada a formulação diferencial para o problema de aterramento elétrico
composto por uma haste, no regime estacionário, com simplificações devido a sua
simetriaaxial.
No Capítulo 3 foi apresentada a modelagem matemática do IEFGM para o
desenvolvimento da ferramenta computacional. Entre as técnicas sem malha
disponíveis, este método foi escolhido para ser utilizado no trabalho devido à sua
robustez,simplicidadeeprecisão.
NoCapítulo4foramapresentadasasanálisesdosistemadeaterramentoapartir
damodelagemdesenvolvida. Para comparaçãodos resultados foi utilizadoo Software
SEGroundqueimplementaumamodelagembaseadanoMoM.Comoprimeiropassona
avaliaçãodocódigodesenvolvido,procedeu‐seumainvestigaçãosobrearepresentação
70
da haste de aterramento na simulação. Realizou‐se uma breve pesquisa bibliográfica
sobre como essa questão é abordada por outros métodos numéricos e, assim, foi
proposto para o IEFGM duas maneiras de representação da geometria da haste de
aterramento: a primeira considerando suasdimensões reais e a outra, a partir de um
modelo filamentar juntamente com o ajuste do tamanho do domínio de influência da
funçãodeformadosnósdistribuídosaolongodahaste.Foramrealizadasanálisespara
configuraçõesdehastesconvencionaisehastesencapsuladas.
Para a avaliação dos potenciais no nível do solo observou‐se que,mesmo com
grandesdomínios computacionais, haviaumadiferençaentreosvaloresdepotenciais
geradospeloIEFGMcomosobtidospeloMoM,quandoeraatribuídoovalordepotencial
elétrico zero na fronteira de truncamento do problema computacional. Assim, foi
propostaumaaproximação,queexploraascaracterísticasdasequipotenciaisgeradasa
umacertadistânciadoaterramento,paraadefiniçãodovalordopotencialelétriconessa
fronteira, permitindo assim a redução do domínio de simulação e a obtenção de
resultadosmaisprecisos.
Entretanto, mesmo com um domínio computacional reduzido, utilizando uma
distribuiçãodenósigualaoraiodahaste,correspondenteàpropostaPRR,amodelagem
ainda se mostrava computacionalmente custosa na obtenção de resultados para as
hastescomraiosconvencionais.Comoalternativabuscou‐seutilizarumadistribuiçãode
nós não uniforme considerando uma densidade de nós maior onde a variação do
potencial elétrico émais acentuada e uma densidademenor no restante do domínio.
Assim, na Seção 4.8, foi realizada uma análise simplificada para a avaliação dos
parâmetros do IEFGM a serem utilizados nas simulações. Os resultados encontrados
apresentaram uma boa precisão, com uma redução significativa do tempo
computacional,emboraparaashastescomraiosconvencionais,amodelagemutilizada
ainda tenha apresentado um grande esforço computacional. Como forma de tornar
possívelaanálisedashastesconvencionaisvislumbrou‐seasuarepresentaçãoapartir
de um modelo filamentar, em que o raio era considerado a partir do domínio de
influênciadosnósquecompõemahaste.Foiestabelecidaumarelaçãoentreodomínio
de influência dos nós da haste e o domínio de influência dos demais nós, para uma
distribuiçãodenósmenosdensanodomíniodoproblema.Comissofoipossívelanalisar
os resultados dos potenciais gerados no solo e de resistência de aterramento para as
configurações de hastes convencionais. Os resultados obtidos apresentaram boa

71
concordânciacomoMoM.Verificou‐se,ainda,queessamodelagemtambémapresentava
bonsresultadosparaashastesencapsuladas.
As análisesdestacadas anteriormente foramrealizadaspara soloshomogêneos.
Como forma de avaliar a potencialidade do modelo também para configurações de
aterramento inseridas em solos não homogêneos, analisou‐se a distribuição de
potenciaisnosologeradosporumaterramentocompostoporumahastecravadaemum
soloestratificadoemduascamadashorizontais.Osresultadosobtidosdemonstrarama
viabilidadedousodométodoparaessetipodeanálise.
Verificou‐sequeosMM,emespecialoIEFGM,possuemumgrandepotencialde
aplicação para problemas de aterramento. No entanto, investigações e
desenvolvimentos relativos à sua implementação ainda são necessários de forma a
torná‐lomaiscompetitivofrenteaosmétodostradicionais.
5.2. PrincipaisContribuições
Julga‐sequeasprincipaiscontribuiçõesdestetrabalhoforam:
Avaliação da viabilidade da utilização de métodos sem malha para
aplicações envolvendo sistemas de aterramento a partir do
desenvolvimentodeummodelomatemáticoecomputacionalbaseadono
IEFGMparaumaconfiguraçãodeaterramentocompostaporumahaste;
UtilizaçãodeumaaproximaçãoparaospotenciaisnafronteiradeDirichlet
ondeodomíniodoproblemafoitruncado,apartirdascaracterísticasdas
equipotenciaisaumadeterminadadistância.Issopermitiuqueodomínio
de simulação fosse reduzido sem perda significativa de precisão de
resultados;
Verificação, ainda que de forma simplificada, que distribuições não
uniformesdenóssãocomputacionalmenteeficienteseprecisas.Essetipo
de representaçãododomínio computacional é umprocedimento já bem
estabelecidoeempregadonastécnicasqueutilizammalhas;
Implementação de uma representação do raio da haste a partir de um
modelo filamentar juntamente com o ajuste do tamanho do domínio de

72
influência da função de forma dos nós colocados ao longo da haste. Por
meiodessarepresentaçãofoipossívelavaliarosprincipaisparâmetrosdo
aterramentoparaumaamplafaixaderaiosdehaste,combaixotempode
processamento;
Demonstração da viabilidade, bem como das potencialidades, do IEFGM
para aplicações envolvendo sistemas de aterramento inseridos em solos
nãohomogêneos.
5.3. PropostasdeContinuidade
Os resultados apresentados neste trabalho demonstraram a potencialidade da
utilização do IEFGM em aplicações relacionadas com sistemas de aterramento. No
entanto, ainda existemmuitas questões quemerecem ser exploradas e aprofundadas,
podendo‐secitar:
Realização de uma otimização multiobjetivo dos parâmetros do IEFGM
para a determinação de uma configuração ótima de distribuição de nós
nãouniformenodomíniodoproblema;
Implementação do código computacional desenvolvido utilizando uma
linguagem de programação que resulte em um menor custo
computacional.Comisso,amodelagempropostaapartirdaconsideração
do raio real da haste poderá ser aplicada também em hastes
convencionais;
Otimização dos parâmetros do IEFGM utilizados na modelagem que
representaoraiodahasteporummodelofilamentar(PRE);
Implementação da aproximação do potencial na fronteira externa de
Dirichlet em problemas de aterramento inseridos em solos não
homogêneos,apartirdoMétododasImagens;
Aprimoraratécnicautilizadaparaocálculodacorrentequedispersapelo
sistema de aterramento quando inseridos em solos estratificados em
camadasdediferentesresistividades;
Modelagem do IEFGM para ser aplicado a outras configurações de
aterramento,taiscomoeletrodoshorizontaisemalhasdeaterramento.

73
ReferênciasBibliográficas
[1] M.A.Mattos,TécnicasdeAterramento,Campinas,Brasil:Okime,2004.
[2] E.D. Sunde,EarthConductionEffectsinTransmissionSystems,NewYork,NY,USA:
Doverpublications,1949.
[3] J.Jin,TheFiniteElementMethodElectromagnetics,NewYork,NY,USA:JohnWiley&
Sons,2002.
[4] R. F.Harrington,FieldComputationbyMomentMethods,NewYork,NY,USA: IEEE
Press,1993.
[5] S. Visacro e A. Soares Jr, “HEM: A model for simulation of lightning ‐ Related
engineeringproblems,”IEEETransactionsonPowerDelivery,vol.20,nº2,pp.1206‐
1208,Apr.2005.
[6] G.R.Liu,MeshFreeMethods:MovingBeyondtheFiniteElementMethod,BocaRaton,
FL,USA:CRCPress,2003.
[7] T. Belytschko, Y. Y. Lu e L. Gu, “Element free‐Galerkin methods,” International
JournalforNumericalMethodsinEngineering,vol.37,pp.229‐256,1994.
[8] E. H. Coppoli, “Modelagem de dispositivos eletromagnéticos através de métodos
sem malha,” Tese de doutorado, Laboratório Nacional de Computação Científica
(LNCC),Petrópolis,Brasil,2010.
[9] T.d.B.Porto,“AnáliseparamétricadométodosemmalhaElementfreeGalerkinem
problemas eletrostáticos,”Dissertaçãodemestrado,ProgramadePós‐Graduação
emEngenhariaElétrica(PPGEL),CentroFederaldeEducaçãoTecnológicadeMinas
Gerais(CEFET‐MG),BeloHorizonte,Brasil,2012.
[10]U.d.C.Resende,E.H.d.R.CoppolieM.M.Afonso,“AmeshlessapproachusingEFG
interpolating moving least‐squares method in 2‐ electromagnetic scattering
analysis,”IEEETransactionsonMagnetics,vol.51,nº3,pp.1‐4,Mar.2015.
[11]U. d. C. Resende, E. H. d. R. Coppoli,M.M. Afonso e S.M. Gonçalves, “Analysis of
element freeGalerkin interlopingmoving least squaremethod in an electrostatic

74
problem,”Microwaveandoptical technology letters,vol. 57, nº 6, pp. 1390‐1395,
Jun.2015.
[12]R.B.Louro,“MétodosemmalhasEFGaplicadoaumespalhamentoeletromagnético
porumcilindrodielétricoinfinito,”Trabalhodeconclusãodecurso,Departamento
de Engenharia Elétrica, Centro Federal de EducaçãoTecnológica deMinasGerais
(CEFET‐MG),BeloHorizonte,Brasil,2014.
[13]L. B. Lopes, “Otimização do método meshless ‐ EFG aplicado a problemas de
espalhamento eletromagnético utilizando algoritmo de evolução diferencial,”
Trabalho de conclusão de curso, Departamento de Engenharia Elétrica, Centro
Federal de Educação Tecnológica de Minas Gerais (CEFET‐MG), Belo Horizonte,
Brasil,2015.
[14]C.K.Rosa,“DesenvolvimentodométodohíbridoIEFGM‐MoMaplicadoàsoluçãodo
espalhamento eletromagnético em duas dimensões,” Dissertação de mestrado,
ProgramadePós‐Graduação emEngenhariaElétrica (PPGEL), Centro Federal de
EducaçãoTecnológicadeMinasGerais(CEFET‐MG),BeloHorizonte,Brasil,2015.
[15]B.M.Araújo,“Técnicasdecomputaçãoparalelaaplicadasemmétodossemmalha,”
Dissertação de mestrado, Programa de Pós‐ Graduação em Engenharia Elétrica
(PPGEL), Centro Federal de Educação Tecnológica de Minas Gerais (CEFET‐MG),
BeloHorizonte,Brasil,2014.
[16]S.Visacro,AterramentosElétricos,SãoPaulo,Brasil:Artiliber,2002.
[17]F. Wenner, “A method of measuring earth resistivity,” Bulletin of theBureau of
Standards,vol.12,nº3,pp.469‐482,Feb.1916.
[18]L. S. Palmer, “Examples of geoelectric surveys,” Proceedings of the IEE ‐PartA:
PowerEngineering,vol.106,nº27,pp.241‐243,Jun.1959.
[19]IEEEGuideforSafetyinACSubstationGrounding,IEEEStandard80‐2000,2000.
[20]Informação e documentação: sistemas de aterramento de subestações ‐ requisitos,
ABNTNBR15751,2009.
[21]H. B. Dwight, “Calculation of resistances to ground,”TransactionsoftheAmerican
InstituteofElectricalEngineers,vol.55,nº12,pp.1319‐1328,Sep.1936.
[22]B. V. Chitnis, L. J. Stratton e E. T. B. Gross, “Grounding grids for high‐voltage
stations,” Transactions of the American Institute of Electrical Engineers. Part III:

75
PowerApparatusandSystems,vol.72,nº2,pp.799‐810,Jan.1953.
[23]E.T.B.GrosseB.Thapar,“Groundinggridsforhigh‐voltagestationsIV‐Resistance
ofgroundinggrids innonuniformsoil,” IEEETransactionsonPowerApparatusand
Systems,vol.82,nº68,pp.782‐788,Oct.1963.
[24]G.F.Tagg,Earthresistances,London,England:GeorgeNewneslimited,1964.
[25]R. Rudenberg, Electrical Shock Waves in Power Systems, Cambridge, MA, USA:
HarvardUniversityPress,1968.
[26]S. Visacro eM. A. De Campos, “Aplicação da aproximação potencial constante no
projetodemalhasdeaterramento:Análisedesensibilidade;Testesexperimentais
com modelos reduzidos,” no X SNPTEE ‐ Seminário Nacional de Produção e
TransmissãodeEnergiaElétrica,1989.
[27]T.N.GiaoeM.P.Sarma,“Effectofatwo‐layerearthontheelectricfieldnearHVDC
groundelectrodes,” IEEETransactionsonPowerApparatusandSystems,vol.91,nº
6,pp.2356‐2365,Nov.1972.
[28]F.DawalibieD.Mukhedkar,“Influenceofgroundsrodsongroundinggrids,”IEEE
TransactionsonPowerApparatusandSystems,vol. 98, nº 6, pp. 2089‐2098, Nov.
1979.
[29]F. Dawalibi e D. Mukhedkar, “Multi step analysis of interconnected grounding
electrodes,” IEEETransactionsonPowerApparatusandSystems,vol. 95, nº 1, pp.
113‐119,Jan.1976.
[30]F. Dawalibi e D. Mukhedkar, “Optimum design of substation grounding in a two
layer earth structure part I ‐ Analytical study,” IEEE Transactions on Power
ApparatusandSystems,vol.94,nº2,pp.252‐261,Mar.1975.
[31]F. Dawalibi e D. Mukhedkar, “Optimum design of substation grounding in a two
layerearthstructurepart II ‐Comparisonbetweentheorethicalandexperimental
results,” IEEETransactionsonPowerApparatusandSystems,vol.94,nº2,pp.262‐
266,Mar.1975.
[32]F. Dawalibi e D. Mukhedkar, “Optimum design of substation grounding in a two
layer earth structure part III ‐ Study of grounding grids perfomance and new
electrodesconfiguration,” IEEETransactionsonPowerApparatusandSystems,vol.
94,nº2,pp.267‐272,Mar.1975.

76
[33]F. Dawalibi e D.Mukhedkar, “Resistance calculation of interconnected grounding
electrodes,” IEEETransactionsonPowerApparatusandSystems ,vol. 96, nº 1, pp.
59‐65,Jan.1977.
[34]F.DawalibieD.Mukhedkar,“Transferredearthpotentialsinpowersystems,”IEEE
TransactionsonPowerApparatusandSystems,vol.97,nº1,pp.90‐101,Jan.1978.
[35]J. A. Stratton, Electromagnetic Theory, New York, NY, USA: McGraw‐Hill Book
Company,1941.
[36]E.B.JoyeR.E.Wilson,“Accuracystudyofthegroundgridanalysisalgorithm,”IEEE
TransactionsonPowerDelivery,vol.1,nº3,pp.97‐103,Jul.1986.
[37]S.VisacroeM.A.deCampos,“Investigaçãoedesenvolvimentodeferramentaspara
aplicação em projetos de aterramentos eléticos no domínio da aproximação
potencial constante,” Dissertação de mestrado, Programa de Pós‐Graduação em
EngenhariaElétrica (PPGEE),UniversidadeFederaldeMinasGerais (UFMG),Belo
Horizonte,Brasil,1989.
[38]F.DawalibieN.Barbeito,“Measurementsandcomputationsoftheperformanceof
groundingsystemsburiedinmultilayersoils,”IEEETransactionsonPowerDelivery,
vol.6,nº4,pp.1483‐1490,Oct.1991.
[39]F.Dawalibi, J.Ma eR.D. Southey, “Behaviourof grounding systems inmultilayer
soils:Aparametricanalysis,” IEEETransactionsonPowerDelivery,vol.9,nº1,pp.
334‐342,Jan.1994.
[40]R. J.Heppe,“Computationofpotentialatsurfaceaboveanenergizedgridorother
electrode, allowing for non‐uniform current distribution,” IEEE Transactions on
PowerApparatusandSystems,vol.98,nº6,pp.1978‐1989,Nov.1979.
[41]M. M. Afonso, “Métodos híbridos na solução de problemas de espalhamento
eletromagnético,”Tesededoutorado,ProgramadePós‐GraduaçãoemEngenharia
Elétrica (PPGEE), Universidade Federal deMinas Gerais (UFMG), Belo Horizonte,
Brasil,2003.
[42]S. A. Viana, “Estudo dos métodos sem malha na resolução de problemas
eletromagnéticos,” Dissertação de mestrado, Programa de Pós‐Graduação em
EngenhariaElétrica (PPGEE),UniversidadeFederaldeMinasGerais (UFMG),Belo
Horizonte,Brasil,1998.
77
[43]J. R. Cardoso, “GROUND‐3D: Uma contribuição à análise dos sistemas de
aterramento pelo método dos elementos finitos,” Tese livre docência, Escola
PolitécnicadaUniversidadedeSãoPaulo(EPUSP),SãoPaulo,Brasil,1993.
[44]B. Nekhoul, C. Guerin, P. Labie, G. Meunier, R. Feuillet e X. Brunotte, “A Finite
elementmethodforcalculatingtheelectromagneticfieldsgeneratedbysubstation
groundingsystems,” IEEETransactionsonMagnetics,vol.31,nº3,pp.2150‐2153,
May.1995.
[45]V. C. Silva, J. R. Cardoso,N.M. Abe eA. Passaro, “Elemento finito unidimensional
anisotrópico:Umnovoelemento "linha"naanálise tridimensionalde sistemasde
aterramentoporelementos finitos,”RevistaControle&Automação,vol.8,nº2,pp.
52‐56,Mai.1997.
[46]M.Trlep,A.HamlereB.Hribernik,“Theanalysisofcomplexgroundingsystemsby
FEM,”IEEETransactionsonMagnetics,vol.34,nº5,pp.2521‐2524,Sep.1998.
[47]M. N. Sadiku,ElementosdeEletromagnetismo,3ª ed., São Paulo, Brasil: Bookman,
2004.
[48]A.G.Lomônaco,“Métodoscomputacionaisaplicadosàsoluçãodeproblemasdealta
frequência em eletromagnetismo,” Dissertação de mestrado, Programa de Pós‐
GraduaçãoemEngenhariaElétrica(PPGEE),UniversidadeFederaldeMinasGerais
(UFMG),BeloHorizonte,Brasil,1997.
[49]R. A. Gingold e J. J. Monaghan, “Smoothed particle hydrodynamics ‐ Theory and
application to non‐spherical stars,” Monthly Notices of the Royal Astronomical
Society,vol.181,nº3,pp.375‐389,Dec.1977.
[50]B.Nayroles,G.TouzoteP.Villon,“Generalizingthefiniteelementmethod:Diffuse
approximation and diffuse elements,” ComputationalMechanics,vol. 10, nº 5, pp.
307‐318,Sep.1992.
[51]W.K.Liu,S.Jun,S.Li,J.AdeeeT.Belytschko,“Reproducingkernelparticlemethods
for structural dynamics,” International Journal for Numerical Methods in
Engineering,vol.38,nº10,pp.1655‐1679,May.1995.
[52]E. Oñate, S. Idelsohn, O. C. Zienkiewicz e R. L. Taylor, “A Finite point method in
computational mechanics. Applications to convective transport and fluid flow,”
Internationaljournalfornumericalmethodsinengineering,vol.39,nº22,pp.3839‐

78
3866,Nov.1996.
[53]E.Oñate, S. Idelsohn,O.C.Zienkiewicz,R.L.TayloreC. Sacco, “A stabilized finite
point method for analysis of fluid mechanics problems,” ComputerMethods in
AppliedMechanicsandEngineering,vol.139,nº1‐4,pp.315‐346,Dec.1996.
[54]S. N. Atluri e T. Zhu, “A newmeshless local Petrov‐Galerkin (MLPG) approach in
computationalmechanics,”ComputationalMechanics,vol.22,nº2,pp.117‐127,Jan.
1998.
[55]N. Z. Lima, “Desenvolvimento de um framework para o método sem malha,”
Dissertação de mestrado, Programa de Pós‐Graduação em Engenharia Elétrica
(PPGEE), Universidade Federal de Minas Gerais (UFMG), Belo Horizonte, Brasil,
2011.
[56]T.BelytschkoeJ.Dolbow,“AnintroductiontoprogrammingthemeshlessElement
freeGalerkinMethod,”ArchivesofComputationalMethodsinEngineering,vol.5,nº
3,pp.207‐241,Jun.1998.
[57]Y. Y. LU, T. Belytschko e M. Tabbara, “Element ‐ free Galerkin method for wave
propagation and dynamic fractures,” ComputerMethods inAppliedMechanicsans
Engineering,vol.126,nº1‐2,pp.131‐153,Sep.1995.
[58]S. Suleau, A. Deraemaeker e P. Bouillard, “Dispersion and pollution of meshless
solutionsfortheHelmholtzequations,”ComputerMethodsinAppliedMechanicsand
Engineering,vol.190,nº5‐7,pp.639‐657,Nov.2000.
[59]P.BouillardeS.Suleau, “Element‐freeGalerkinsolutions forHelmholtzproblems:
formulationandnumericalassessmentofthepollutioneffect,”ComputerMethodsin
AppliedMechanicsandEngineering,vol.162,nº1‐4,pp.317‐335,Oct.1998.
[60]I.V.Singh,“ApplicationofmeshlessEFGmethodinfluidflowproblems,”Sãdhanã,
vol.29,nº3,pp.285‐296,May.2004.
[61]S.A.Viana, “Meshlessmethodsapplied to computacional electromagnetics,”Ph.D.
thesis, Department of Electronic & Electrical Engineering, Univ. of Bath, Bath,
England,2006.
[62]P. Lancaster e K. Salkauskas, “Surfaces generated by moving least squares
methods,”MathematicsofComputation,vol.37,nº155,pp.141‐158,Jul.1981.
[63]T.Belytschko,Y.Krongauz,D.Organ,M.FlemingeP.Krysl,“Meshlessmethods:An

79
overview and recent developments,” ComputerMethods inAppliedMechanicsand
Engineering,vol.139,nº1‐4,pp.1‐47,May.1996.
[64]E.H.Coppoli,R.C.MesquitaeR.S.Silva,“Periodicboundaryconditionsinelement
freeGalerkinmethod,”TheInternationalJournalforComputationandMathematics
inElectricalandElectronicEngineering,vol.28,nº4,pp.922‐934,Oct.2009.
[65]E. R. Arend, “Estudo de aterramento embaixas frequencias usando a formulação
eletrocinéticaassociadaaométododeelementosfinitos,”Dissertaçãodemestrado,
ProgramadePós‐GraduaçãoemEngenhariaElétrica,UniversidadeFederaldeSanta
Catarina(UFSC),Florianópolis,Brasil,2009.
[66]J. R. Cardoso, “FEM Modelling of grounded systems with unbounded approach,”
IEEETransactionsonMagnetics,vol.30,nº5,pp.2893‐2896,Sep.1994.
[67]V. C. Silva, “Método de elementos finitos aplicados à solução de problemas de
aterrametoelétrico,”Teselivredocência,EscolaPolitécnicadaUniversidadedeSão
Paulo(EPUSP),SãoPaulo,Brasil,2006.
[68]F. Dawalibi e D. Mukhedkar, “Parametric analysis of grounding grids,” IEEE
Transactions onPowerApparatus and Systems, vol. 98, nº 5, p. 1659–1668, Sep.
1979.
[69]ED‐3.14‐Critériosparaaterramentoderedesdedistribuição,CompanhiaEnergética
deMinasGerais(CEMIG),BeloHorizonte,MG,1992.
[70]E.B.JoyeR.E.Wilson,“Accuracystudyofthegroundgridanalysisalgorithm,”IEEE
transactiononpowerdelivery,vol.1,pp.97‐102,julho1986.