Embed Size (px)
Citation preview

MEEC Mestrado em Engenharia Electrotécnica e de Computadores
MCSDI Modelação e Controlo de Sistemas Dinâmicos
Exercícios de
Função Descritiva
Conjunto de exercícios elaborados pelos docentes José Tenreiro Machado (JTM), Manuel Santos Silva (MSS), Vítor Rodrigues da Cunha (VRC) e Jorge Estrela da Silva (JES).
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
1
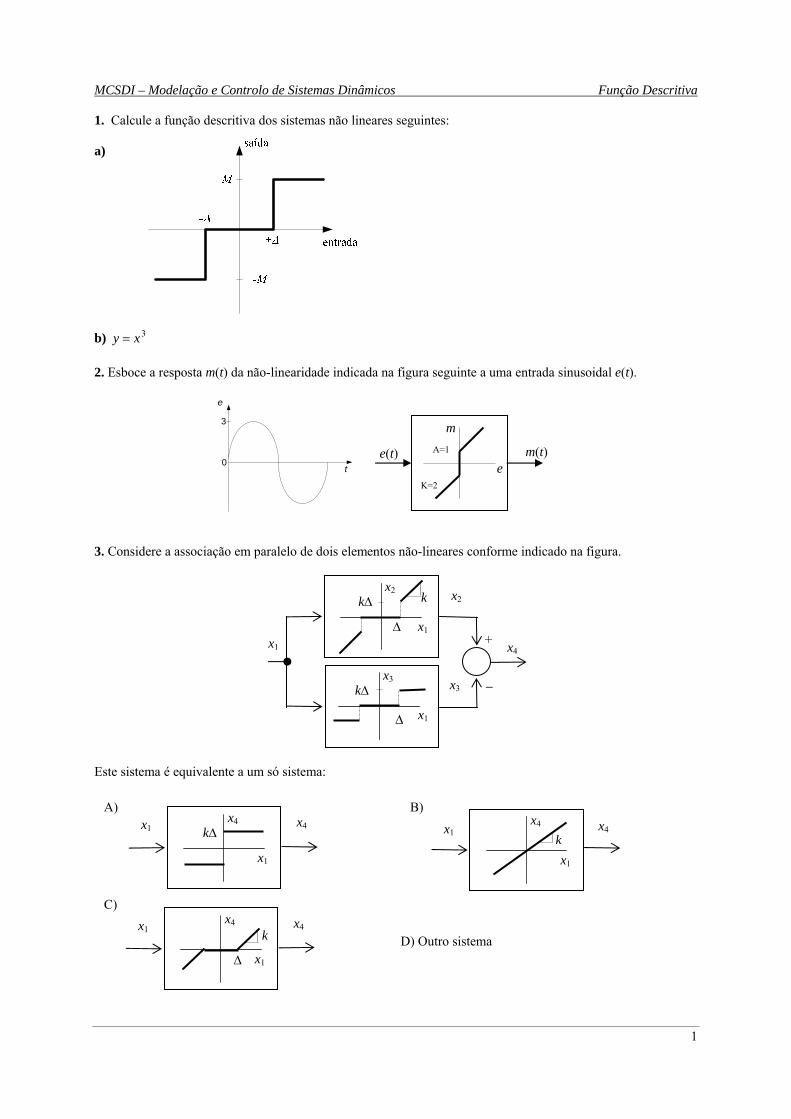
1. Calcule a função descritiva dos sistemas não lineares seguintes: a) b) 3xy = 2. Esboce a resposta m(t) da não-linearidade indicada na figura seguinte a uma entrada sinusoidal e(t).
3
0t
e
3. Considere a associação em paralelo de dois elementos não-lineares conforme indicado na figura.
Este sistema é equivalente a um só sistema:
D) Outro sistema
e
m A=1
K=2
m(t) e(t)
Δ x1
x4 x4 x1 k
C)
k x1
x4 x1 x4 B)
kΔ
x1
x4 x4 x1 A)
Δ x1
x2
Δ x1
x3 x3
x2
x1
k
kΔ
x4 +
−
kΔ
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
2
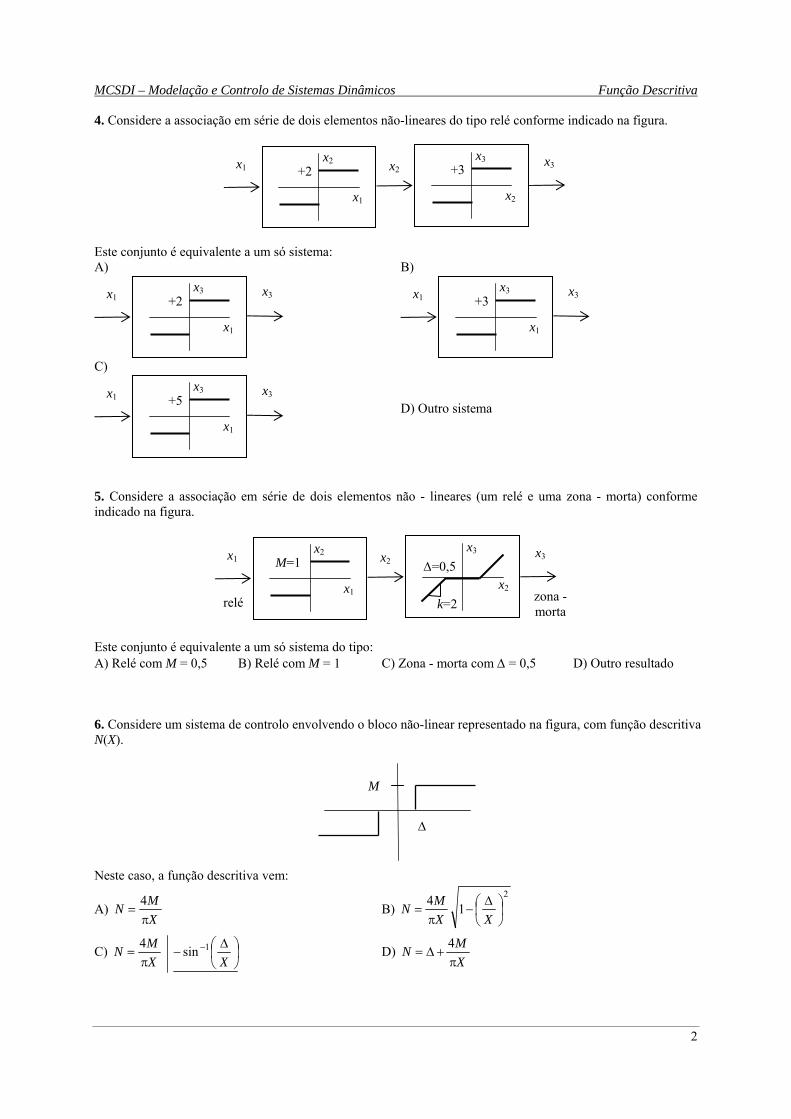
4. Considere a associação em série de dois elementos não-lineares do tipo relé conforme indicado na figura.
Este conjunto é equivalente a um só sistema: A)
B)
C)
D) Outro sistema
5. Considere a associação em série de dois elementos não - lineares (um relé e uma zona - morta) conforme indicado na figura.
Este conjunto é equivalente a um só sistema do tipo: A) Relé com M = 0,5 B) Relé com M = 1 C) Zona - morta com Δ = 0,5 D) Outro resultado 6. Considere um sistema de controlo envolvendo o bloco não-linear representado na figura, com função descritiva N(X).
Neste caso, a função descritiva vem:
A) XMN
π=
4 B) 2
14⎟⎠⎞
⎜⎝⎛ Δ
−π
=XX
MN
C) ⎟⎠⎞
⎜⎝⎛ Δ
−π
= −
XXMN 1sin4 D)
XMN
π+Δ=
4
+5
x1
x3 x3 x1
+3
x1
x3 x3 x1 +2
x1
x3 x3 x1
M
Δ
+2
x1
x2 +3
x2
x3 x3 x2 x1
M=1
x1
x2 Δ=0,5
x2
x3 x3 x2 x1
k=2 relé zona - morta
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
3
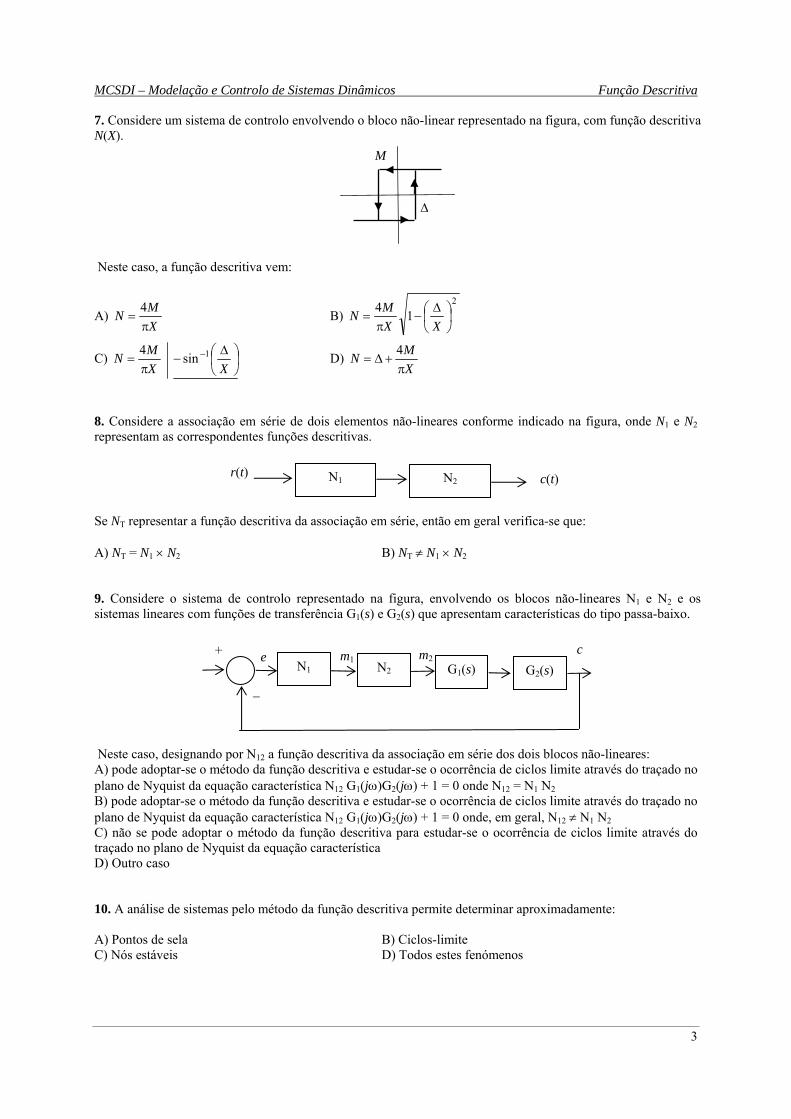
7. Considere um sistema de controlo envolvendo o bloco não-linear representado na figura, com função descritiva N(X).
Neste caso, a função descritiva vem:
A) XMN
π=
4 B) 2
14⎟⎠⎞
⎜⎝⎛ Δ
−π
=XX
MN
C) ⎟⎠⎞
⎜⎝⎛ Δ
−π
= −
XXMN 1sin4 D)
XMN
π+Δ=
4
8. Considere a associação em série de dois elementos não-lineares conforme indicado na figura, onde N1 e N2 representam as correspondentes funções descritivas.
Se NT representar a função descritiva da associação em série, então em geral verifica-se que: A) NT = N1 × N2 B) NT ≠ N1 × N2 9. Considere o sistema de controlo representado na figura, envolvendo os blocos não-lineares N1 e N2 e os sistemas lineares com funções de transferência G1(s) e G2(s) que apresentam características do tipo passa-baixo.
Neste caso, designando por N12 a função descritiva da associação em série dos dois blocos não-lineares: A) pode adoptar-se o método da função descritiva e estudar-se o ocorrência de ciclos limite através do traçado no plano de Nyquist da equação característica N12 G1(jω)G2(jω) + 1 = 0 onde N12 = N1 N2 B) pode adoptar-se o método da função descritiva e estudar-se o ocorrência de ciclos limite através do traçado no plano de Nyquist da equação característica N12 G1(jω)G2(jω) + 1 = 0 onde, em geral, N12 ≠ N1 N2 C) não se pode adoptar o método da função descritiva para estudar-se o ocorrência de ciclos limite através do traçado no plano de Nyquist da equação característica D) Outro caso 10. A análise de sistemas pelo método da função descritiva permite determinar aproximadamente: A) Pontos de sela B) Ciclos-limite C) Nós estáveis D) Todos estes fenómenos
N1 r(t) c(t) N2
M
Δ
c
−
+ e N2
m1 N1 G2(s) m2
G1(s)
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
4
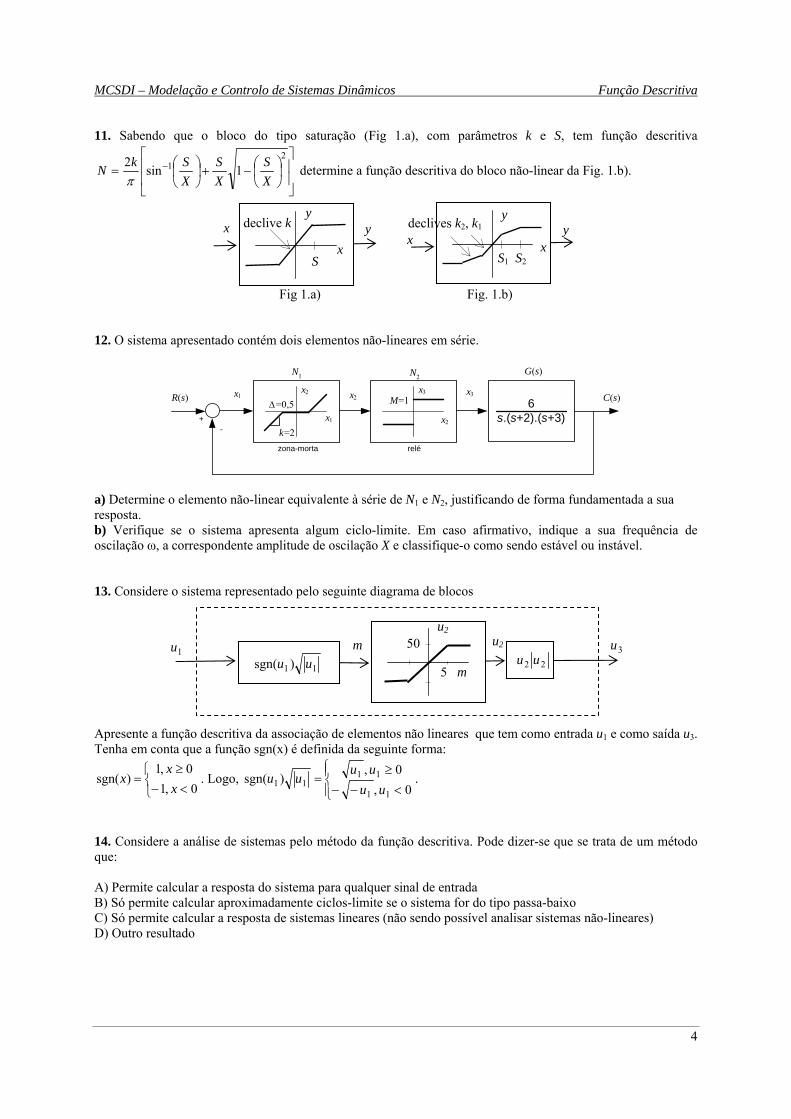
11. Sabendo que o bloco do tipo saturação (Fig 1.a), com parâmetros k e S, tem função descritiva
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛= −
21 1sin2
XS
XS
XSkN
π determine a função descritiva do bloco não-linear da Fig. 1.b).
Fig 1.a) Fig. 1.b)
12. O sistema apresentado contém dois elementos não-lineares em série.
M=1
x2
x3
Δ=0,5x1
x2 x3x2x1
k=2+
-
6s.(s+2).(s+3)
R(s) C(s)
G(s)N1 N2
zona-morta relé
a) Determine o elemento não-linear equivalente à série de N1 e N2, justificando de forma fundamentada a sua resposta. b) Verifique se o sistema apresenta algum ciclo-limite. Em caso afirmativo, indique a sua frequência de oscilação ω, a correspondente amplitude de oscilação X e classifique-o como sendo estável ou instável. 13. Considere o sistema representado pelo seguinte diagrama de blocos
Apresente a função descritiva da associação de elementos não lineares que tem como entrada u1 e como saída u3. Tenha em conta que a função sgn(x) é definida da seguinte forma:
⎩⎨⎧
<−≥
=0,1
0,1)sgn(
xx
x . Logo, ⎪⎩
⎪⎨⎧
<−−≥
=0,
0,)sgn(
11
1111 uu
uuuu .
14. Considere a análise de sistemas pelo método da função descritiva. Pode dizer-se que se trata de um método que: A) Permite calcular a resposta do sistema para qualquer sinal de entrada B) Só permite calcular aproximadamente ciclos-limite se o sistema for do tipo passa-baixo C) Só permite calcular a resposta de sistemas lineares (não sendo possível analisar sistemas não-lineares) D) Outro resultado
u2 50
5 m
u2 m
11 )sgn( uu 22 uu1u 3u
x y
y
S1 S2 x
declives k2, k1x y y
S x
declive k
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
5
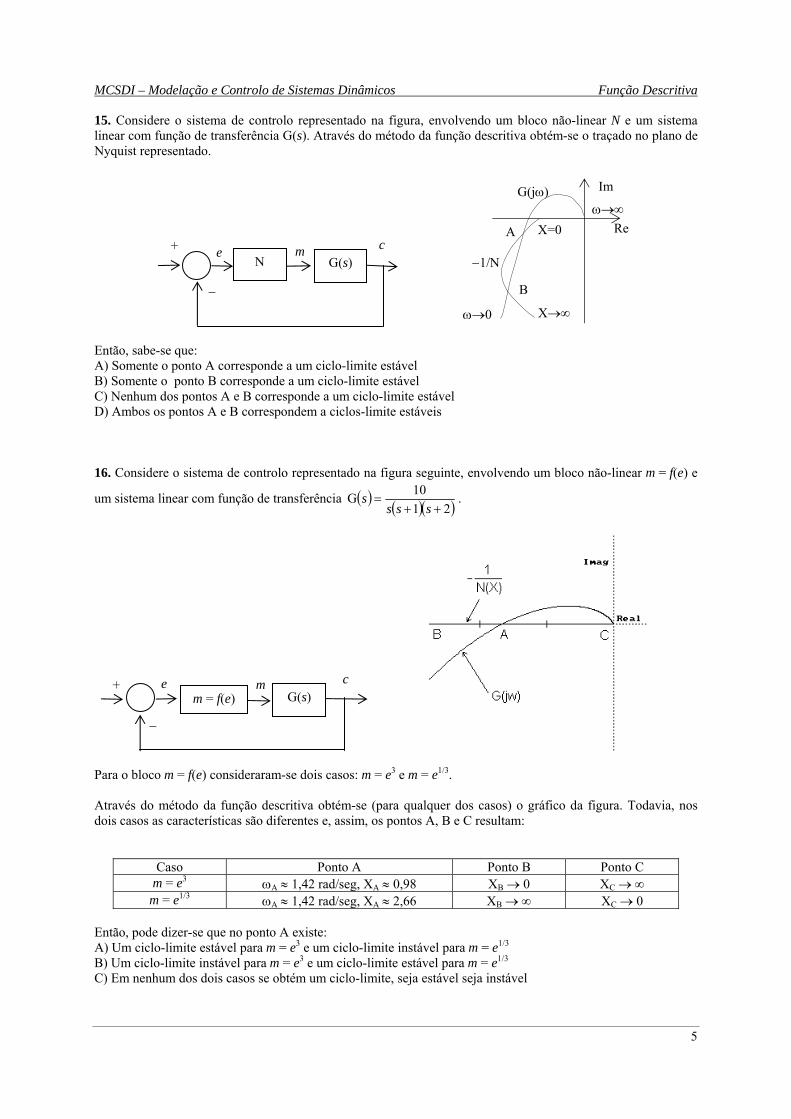
15. Considere o sistema de controlo representado na figura, envolvendo um bloco não-linear N e um sistema linear com função de transferência G(s). Através do método da função descritiva obtém-se o traçado no plano de Nyquist representado.
Então, sabe-se que: A) Somente o ponto A corresponde a um ciclo-limite estável B) Somente o ponto B corresponde a um ciclo-limite estável C) Nenhum dos pontos A e B corresponde a um ciclo-limite estável D) Ambos os pontos A e B correspondem a ciclos-limite estáveis 16. Considere o sistema de controlo representado na figura seguinte, envolvendo um bloco não-linear m = f(e) e
um sistema linear com função de transferência ( ) ( )( )2110G
++=
ssss .
Para o bloco m = f(e) consideraram-se dois casos: m = e3 e m = e1/3. Através do método da função descritiva obtém-se (para qualquer dos casos) o gráfico da figura. Todavia, nos dois casos as características são diferentes e, assim, os pontos A, B e C resultam:
Caso Ponto A Ponto B Ponto C m = e3 ωA ≈ 1,42 rad/seg, XA ≈ 0,98 XB → 0 XC → ∞
m = e1/3 ωA ≈ 1,42 rad/seg, XA ≈ 2,66 XB → ∞ XC → 0 Então, pode dizer-se que no ponto A existe: A) Um ciclo-limite estável para m = e3 e um ciclo-limite instável para m = e1/3 B) Um ciclo-limite instável para m = e3 e um ciclo-limite estável para m = e1/3 C) Em nenhum dos dois casos se obtém um ciclo-limite, seja estável seja instável
e c
−
+ G(s)
m m = f(e)
Re
Im G(jω)
−1/N
A
B
X→∞
X=0 ω→∞
ω→0
e c
−
+ G(s)
m N
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
6
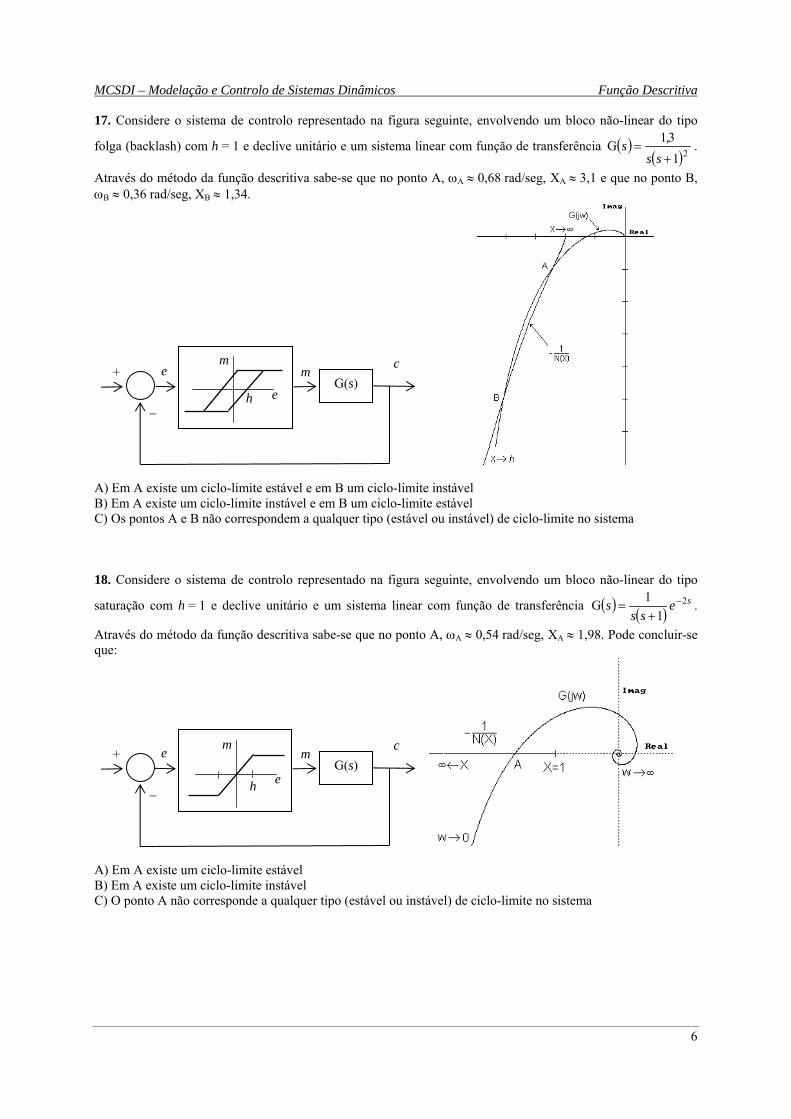
17. Considere o sistema de controlo representado na figura seguinte, envolvendo um bloco não-linear do tipo
folga (backlash) com h = 1 e declive unitário e um sistema linear com função de transferência ( )( )21
31G+
=ss
,s .
Através do método da função descritiva sabe-se que no ponto A, ωA ≈ 0,68 rad/seg, XA ≈ 3,1 e que no ponto B, ωB ≈ 0,36 rad/seg, XB ≈ 1,34.
A) Em A existe um ciclo-limite estável e em B um ciclo-limite instável B) Em A existe um ciclo-limite instável e em B um ciclo-limite estável C) Os pontos A e B não correspondem a qualquer tipo (estável ou instável) de ciclo-limite no sistema 18. Considere o sistema de controlo representado na figura seguinte, envolvendo um bloco não-linear do tipo
saturação com h = 1 e declive unitário e um sistema linear com função de transferência ( ) ( )se
sss 2
11G −
+= .
Através do método da função descritiva sabe-se que no ponto A, ωA ≈ 0,54 rad/seg, XA ≈ 1,98. Pode concluir-se que:
A) Em A existe um ciclo-limite estável B) Em A existe um ciclo-limite instável C) O ponto A não corresponde a qualquer tipo (estável ou instável) de ciclo-limite no sistema
e c
−
+ G(s)
m
h
m
e
e c
−
+ G(s)
m
h
m
e
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
7
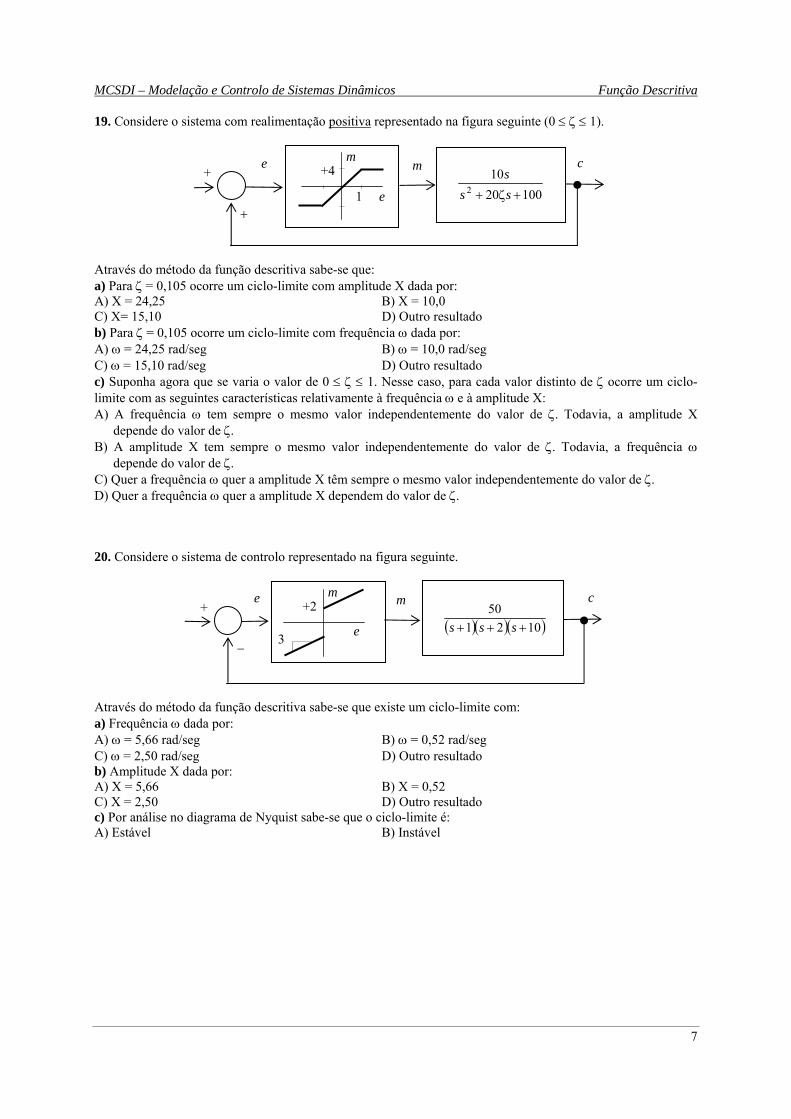
19. Considere o sistema com realimentação positiva representado na figura seguinte (0 ≤ ζ ≤ 1).
Através do método da função descritiva sabe-se que: a) Para ζ = 0,105 ocorre um ciclo-limite com amplitude X dada por: A) X = 24,25 B) X = 10,0 C) X= 15,10 D) Outro resultado b) Para ζ = 0,105 ocorre um ciclo-limite com frequência ω dada por: A) ω = 24,25 rad/seg B) ω = 10,0 rad/seg C) ω = 15,10 rad/seg D) Outro resultado c) Suponha agora que se varia o valor de 0 ≤ ζ ≤ 1. Nesse caso, para cada valor distinto de ζ ocorre um ciclo-limite com as seguintes características relativamente à frequência ω e à amplitude X: A) A frequência ω tem sempre o mesmo valor independentemente do valor de ζ. Todavia, a amplitude X
depende do valor de ζ. B) A amplitude X tem sempre o mesmo valor independentemente do valor de ζ. Todavia, a frequência ω
depende do valor de ζ. C) Quer a frequência ω quer a amplitude X têm sempre o mesmo valor independentemente do valor de ζ. D) Quer a frequência ω quer a amplitude X dependem do valor de ζ. 20. Considere o sistema de controlo representado na figura seguinte.
Através do método da função descritiva sabe-se que existe um ciclo-limite com: a) Frequência ω dada por: A) ω = 5,66 rad/seg B) ω = 0,52 rad/seg C) ω = 2,50 rad/seg D) Outro resultado b) Amplitude X dada por: A) X = 5,66 B) X = 0,52 C) X = 2,50 D) Outro resultado c) Por análise no diagrama de Nyquist sabe-se que o ciclo-limite é: A) Estável B) Instável
c m e
( )( )( )102150
+++ sss−
+ +2
e
m
3
+4
1 e
m c m e
+
+ 10020
102 +ζ+ ss
s
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
8
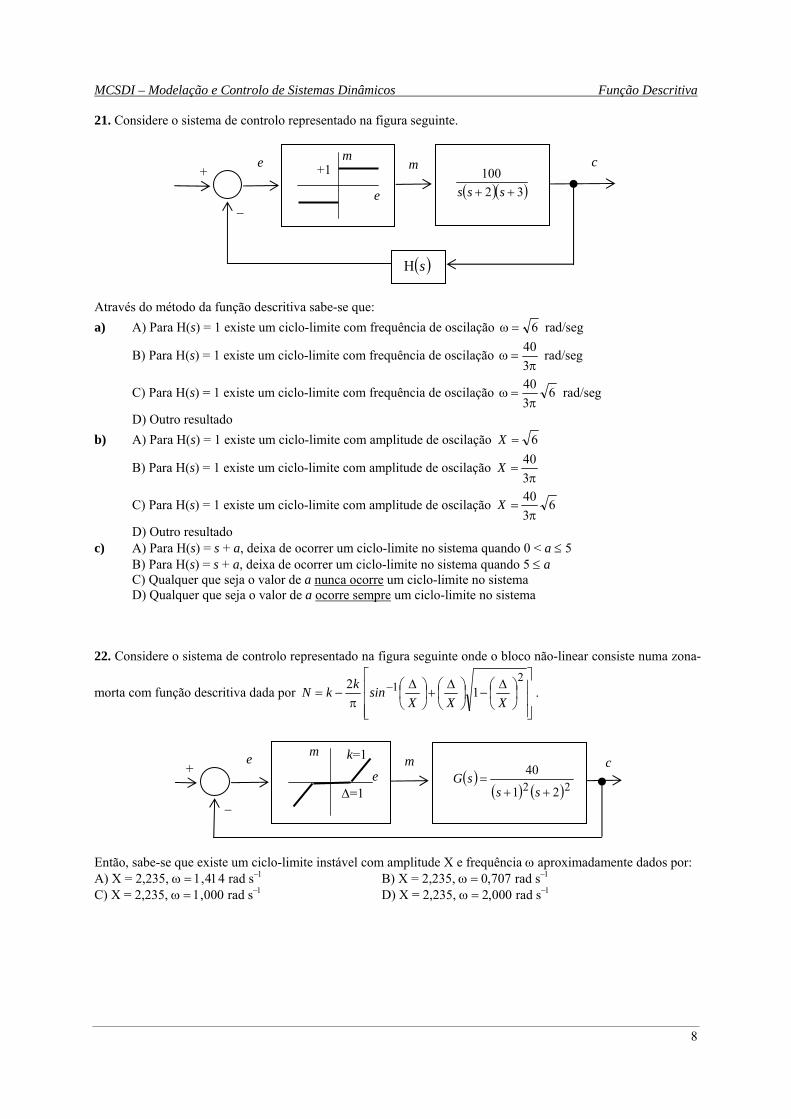
21. Considere o sistema de controlo representado na figura seguinte.
Através do método da função descritiva sabe-se que: a) A) Para H(s) = 1 existe um ciclo-limite com frequência de oscilação 6=ω rad/seg
B) Para H(s) = 1 existe um ciclo-limite com frequência de oscilação π
=ω340 rad/seg
C) Para H(s) = 1 existe um ciclo-limite com frequência de oscilação 6340π
=ω rad/seg
D) Outro resultado b) A) Para H(s) = 1 existe um ciclo-limite com amplitude de oscilação 6=X
B) Para H(s) = 1 existe um ciclo-limite com amplitude de oscilação π
=340X
C) Para H(s) = 1 existe um ciclo-limite com amplitude de oscilação 6340π
=X
D) Outro resultado c) A) Para H(s) = s + a, deixa de ocorrer um ciclo-limite no sistema quando 0 < a ≤ 5 B) Para H(s) = s + a, deixa de ocorrer um ciclo-limite no sistema quando 5 ≤ a C) Qualquer que seja o valor de a nunca ocorre um ciclo-limite no sistema D) Qualquer que seja o valor de a ocorre sempre um ciclo-limite no sistema
22. Considere o sistema de controlo representado na figura seguinte onde o bloco não-linear consiste numa zona-
morta com função descritiva dada por ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛ Δ
−⎟⎠⎞
⎜⎝⎛ Δ
+⎟⎠⎞
⎜⎝⎛ Δ
π−= −
21 12
XXXsinkkN .
Então, sabe-se que existe um ciclo-limite instável com amplitude X e frequência ω aproximadamente dados por: A) X = 2,235, ω = 1,414 rad s−1 B) X = 2,235, ω = 0,707 rad s−1 C) X = 2,235, ω = 1,000 rad s−1 D) X = 2,235, ω = 2,000 rad s−1
+1
e
m c m e
( )( )32100
++ sss
( )sH
−
+
Δ=1 e
m c m e
( )( ) ( )22 21
40
++=
sssG
−
+ k=1
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
9
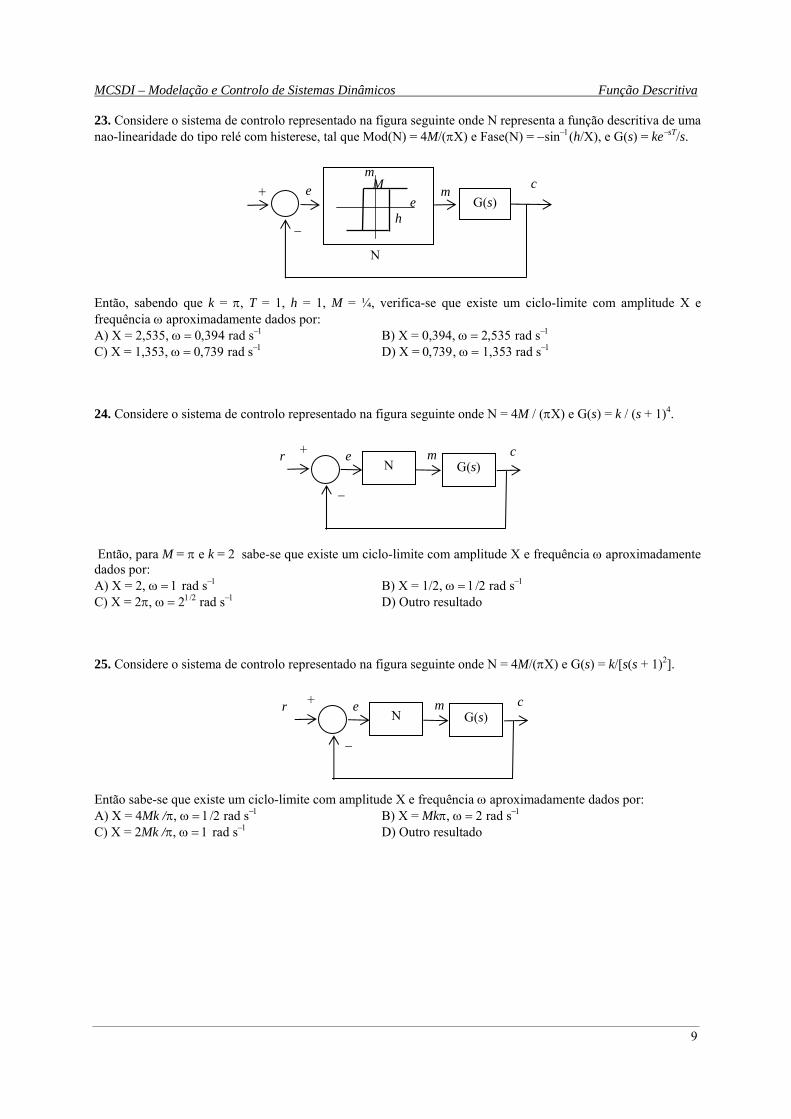
23. Considere o sistema de controlo representado na figura seguinte onde N representa a função descritiva de uma nao-linearidade do tipo relé com histerese, tal que Mod(N) = 4M/(πX) e Fase(N) = −sin−1(h/X), e G(s) = ke−sT/s.
Então, sabendo que k = π, T = 1, h = 1, M = ¼, verifica-se que existe um ciclo-limite com amplitude X e frequência ω aproximadamente dados por: A) X = 2,535, ω = 0,394 rad s−1 B) X = 0,394, ω = 2,535 rad s−1 C) X = 1,353, ω = 0,739 rad s−1 D) X = 0,739, ω = 1,353 rad s−1 24. Considere o sistema de controlo representado na figura seguinte onde N = 4M / (πX) e G(s) = k / (s + 1)4.
Então, para M = π e k = 2 sabe-se que existe um ciclo-limite com amplitude X e frequência ω aproximadamente dados por: A) X = 2, ω = 1 rad s−1 B) X = 1/2, ω = 1/2 rad s−1 C) X = 2π, ω = 21/2 rad s−1 D) Outro resultado 25. Considere o sistema de controlo representado na figura seguinte onde N = 4M/(πX) e G(s) = k/[s(s + 1)2].
Então sabe-se que existe um ciclo-limite com amplitude X e frequência ω aproximadamente dados por: A) X = 4Mk /π, ω = 1/2 rad s−1 B) X = Mkπ, ω = 2 rad s−1 C) X = 2Mk /π, ω = 1 rad s−1 D) Outro resultado
c
−
+ e m N G(s)
r
e c
−
+ G(s)
m
h
m
e
N
M
c
−
+ e m N G(s)
r
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
10
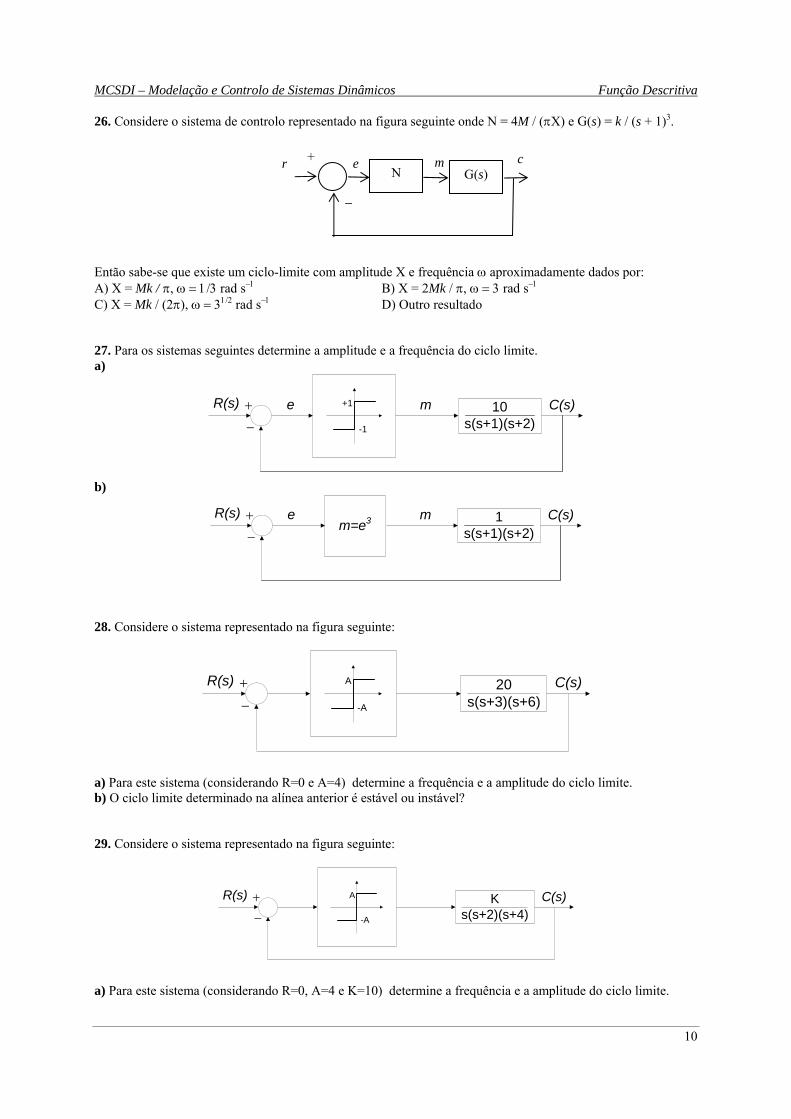
26. Considere o sistema de controlo representado na figura seguinte onde N = 4M / (πX) e G(s) = k / (s + 1)3.
Então sabe-se que existe um ciclo-limite com amplitude X e frequência ω aproximadamente dados por: A) X = Mk / π, ω = 1/3 rad s−1 B) X = 2Mk / π, ω = 3 rad s−1 C) X = Mk / (2π), ω = 31/2 rad s−1 D) Outro resultado 27. Para os sistemas seguintes determine a amplitude e a frequência do ciclo limite. a)
+
−
R(s) 10s(s+1)(s+2)
C(s)-1
+1e m
b)
m=e3+
−
R(s) 1s(s+1)(s+2)
C(s)e m
28. Considere o sistema representado na figura seguinte:
+
−
R(s) 20s(s+3)(s+6)
C(s)
-A
A
a) Para este sistema (considerando R=0 e A=4) determine a frequência e a amplitude do ciclo limite. b) O ciclo limite determinado na alínea anterior é estável ou instável? 29. Considere o sistema representado na figura seguinte:
+
−
R(s) Ks(s+2)(s+4)
C(s)-A
A
a) Para este sistema (considerando R=0, A=4 e K=10) determine a frequência e a amplitude do ciclo limite.
c
−
+ e m N G(s)
r
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
11
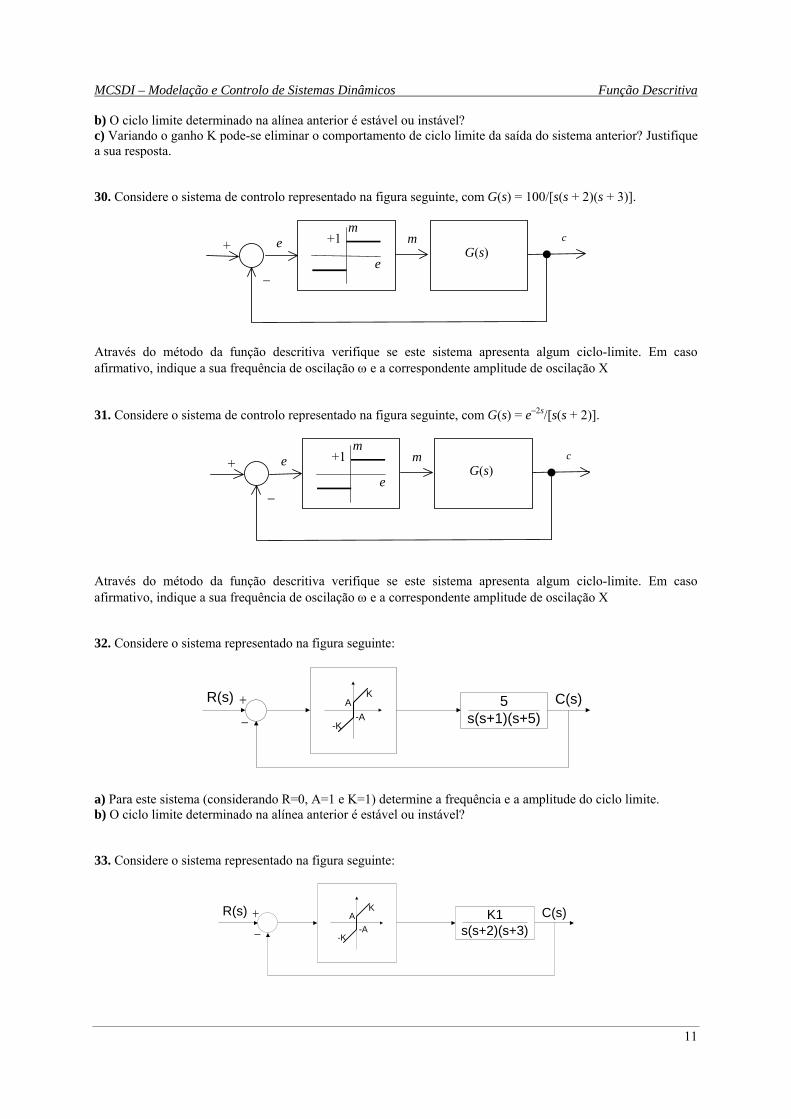
b) O ciclo limite determinado na alínea anterior é estável ou instável? c) Variando o ganho K pode-se eliminar o comportamento de ciclo limite da saída do sistema anterior? Justifique a sua resposta. 30. Considere o sistema de controlo representado na figura seguinte, com G(s) = 100/[s(s + 2)(s + 3)].
Através do método da função descritiva verifique se este sistema apresenta algum ciclo-limite. Em caso afirmativo, indique a sua frequência de oscilação ω e a correspondente amplitude de oscilação X 31. Considere o sistema de controlo representado na figura seguinte, com G(s) = e−2s/[s(s + 2)].
Através do método da função descritiva verifique se este sistema apresenta algum ciclo-limite. Em caso afirmativo, indique a sua frequência de oscilação ω e a correspondente amplitude de oscilação X 32. Considere o sistema representado na figura seguinte:
+
−
R(s) 5s(s+1)(s+5)
C(s)
-K-A
AK
a) Para este sistema (considerando R=0, A=1 e K=1) determine a frequência e a amplitude do ciclo limite. b) O ciclo limite determinado na alínea anterior é estável ou instável? 33. Considere o sistema representado na figura seguinte:
+
−
R(s) K1s(s+2)(s+3)
C(s)
-K-A
AK
+1
e
mc me
G(s)
−
+
+1
e
mc me
G(s)
−
+

MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
12
a) Para este sistema (considerando R=0, A=4, K=1 e K1=20) determine a frequência e a amplitude do ciclo limite. b) O ciclo limite determinado na alínea anterior é estável ou instável? c) Diminuindo o valor do ganho K1 como variam as características do ciclo limite da saída do sistema anterior? Justifique a sua resposta. 34. Considere o sistema de controlo representado na figura seguinte, exibindo uma não-linearidade do tipo “histerese” (backlash), com parâmetros 2A = 0.5, B = 1 e C = 1, e um sistema linear com função de transferência G(s) = 3/[s(s + 1)2].
Através do método da função descritiva verifique se este sistema apresenta algum ciclo-limite. Em caso afirmativo, indique a sua frequência de oscilação ω e a correspondente amplitude de oscilação X 35. Considere o sistema de controlo representado na figura seguinte, exibindo uma não-linearidade do tipo “folga” (backlash), com parâmetros A = 1 e K = 1, e um sistema linear com função de transferência G(s) = 1,5/[s(s + 1)2].
Através do método da função descritiva verifique se este sistema apresenta algum ciclo-limite. Em caso afirmativo, indique a sua frequência de oscilação ω e a correspondente amplitude de oscilação X 36. Considere os sistemas representados nas figuras seguintes. Para cada um analise a ocorrência de ciclos-limite através do método da função descritiva. a)
R(s) 1s(s+1)
C(s)
-1
+1e m-0.5
0.5
Relé com histerese
+
-
K ec
m
e G(s)
−
+
backlash
+A−A m
c m e G(s)
−
+
2A
e
m C
B

MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva
13
b)
R(s) 10s(s+1)
C(s)-1+1
e
Histerese
+-
37. Considere o sistema de controlo representado na figura seguinte:
R(s) C(s)+
-
10(0,4s+1)(2s+1)
N G(s)
2h
1
-1
sendo ⎟⎠⎞
⎜⎝⎛−∠=
Xh
XN arcsin4
π, para X > h. A representação gráfica no plano complexo de −1/N, para dois
valores distintos de h (h = 0,1 e h = 0,3), e de G(jω) é apresentada na figura seguinte.
Re
Im
G(jω)
h = 0,1
h = 0,3
−1/N para
−1/N para
Da análise desta figura é possível concluir que: A) Este sistema apresenta um ciclo limite estável para os dois valores de h (h = 0,1 e h = 0,3) em consideração B) Para h = 0,1 este sistema apresenta um ciclo limite estável e para h = 0,3 um ciclo limite instável C) Para h = 0,1 este sistema apresenta um ciclo limite instável e para h = 0,3 um ciclo limite estável D) Este sistema apresenta um ciclo limite instável para os dois valores de h (h = 0,1 e h = 0,3) em consideração
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
1
1tω
2
1 ⎟⎠⎞
⎜⎝⎛ Δ
−X
XΔ1
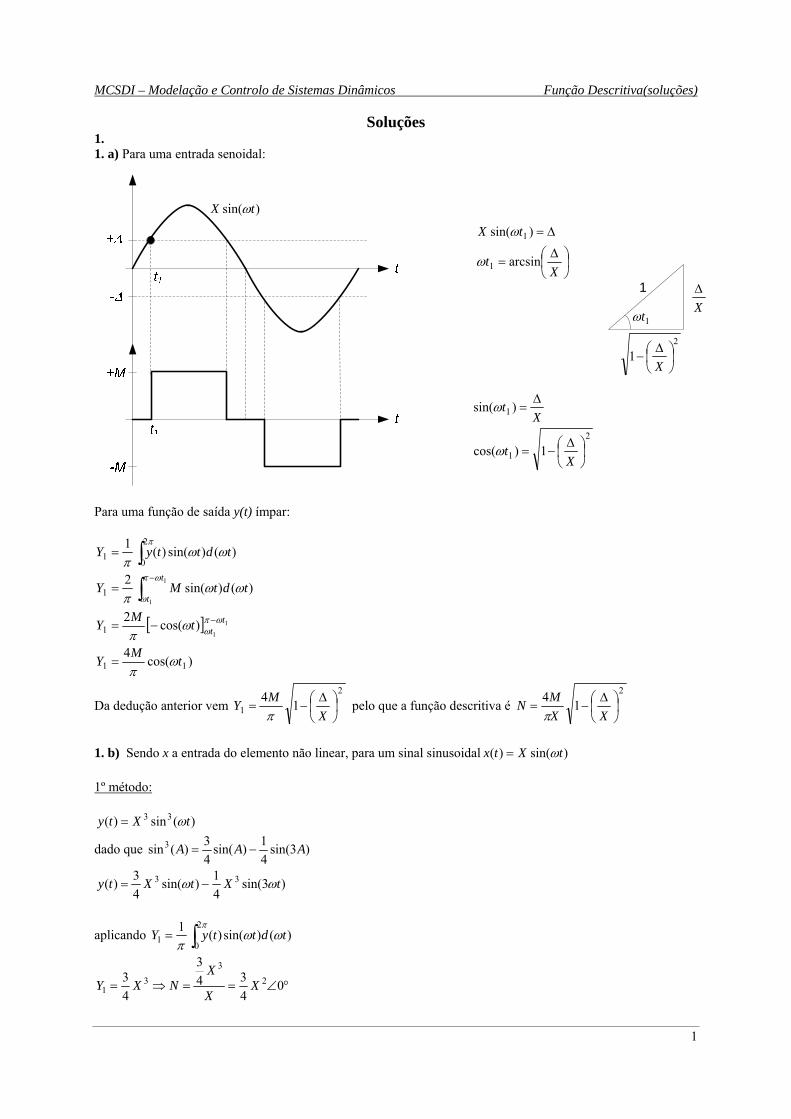
Soluções 1. 1. a) Para uma entrada senoidal:
⎟⎠⎞
⎜⎝⎛ Δ
=
Δ=
Xt
tX
arcsin
)sin(
1
1
ω
ω
2
1
1
1)cos(
)sin(
⎟⎠⎞
⎜⎝⎛ Δ
−=
Δ=
Xt
Xt
ω
ω
Para uma função de saída y(t) ímpar:
[ ]
)cos(4
)cos(2
)()sin(2
)()sin()(1
11
1
1
2
01
1
1
1
1
tMY
tMY
tdtMY
tdttyY
tt
t
t
ωπ
ωπ
ωωπ
ωωπ
ωπω
ωπ
ω
π
=
−=
=
=
−
−
∫∫
Da dedução anterior vem 2
1 14⎟⎠⎞
⎜⎝⎛ Δ
−=X
MYπ
pelo que a função descritiva é 2
14⎟⎠⎞
⎜⎝⎛ Δ
−=XX
MNπ
1. b) Sendo x a entrada do elemento não linear, para um sinal sinusoidal )sin()( tXtx ω= 1º método:
)(sin)( 33 tXty ω=
dado que )3sin(41)sin(
43)(sin3 AAA −=
)3sin(41)sin(
43)( 33 tXtXty ωω −=
aplicando ∫=π
ωωπ
2
01 )()sin()(1 tdttyY
°∠==⇒= 0434
3
43 2
33
1 XX
XNXY
)sin( tX ω
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
2
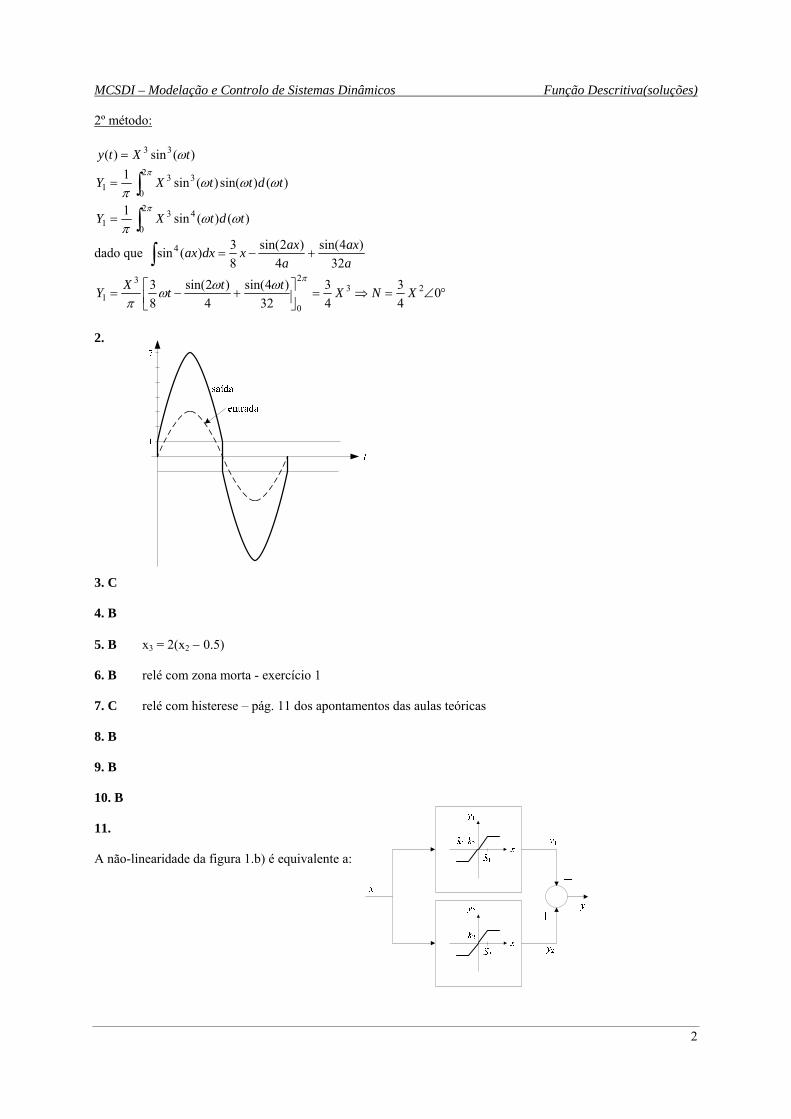
2º método:
)(sin)( 33 tXty ω=
∫∫
=
=
π
π
ωωπ
ωωωπ
2
0
431
2
0
331
)()(sin1
)()sin()(sin1
tdtXY
tdttXY
dado que aax
aaxxdxax
32)4sin(
4)2sin(
83)(sin4 +−=∫
°∠=⇒=⎥⎦⎤
⎢⎣⎡ +−= 0
43
43
32)4sin(
4)2sin(
83 23
2
0
3
1 XNXtttXYπωωω
π
2. 3. C 4. B 5. B x3 = 2(x2 − 0.5) 6. B relé com zona morta - exercício 1 7. C relé com histerese – pág. 11 dos apontamentos das aulas teóricas 8. B 9. B 10. B 11. A não-linearidade da figura 1.b) é equivalente a:

MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
3
( )
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−
=
−
−
222212
2
2111121
1
1sin2
1sin2
XS
XS
XSkN
XS
XS
XSkkN
π
π
( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−=+= −−
22221
2
21111
2121 1sin1sin2XS
XS
XSk
XS
XS
XSkkNNN
π
12. 12. a)
-1
+1 x3x1x1
x3
com função descritiva: X
Nπ4
=
12. b) Este sistema apresenta um ciclo limite estável com amplitude X = 0,255 e frequência ω = 2,45 rad/s. 13. Calcular valor a partir do qual se atinge a saturação (m = 5)
255 11 =⇔= uu Para 251 >u teremos sempre u2 = 50 e u3 =2500. Na zona linear temos (considerando ainda apenas u1 não negativo)
251,25003
2510,25
25005
503 1
2
1
>=
≤<=⎟⎠⎞
⎜⎝⎛=
uu
uuuu
Para valores negativos de u1 temos, de uma forma análoga:
251,25003
0125,25
25005
503 1
2
1
−<−=
≤≤−=⎟⎠⎞
⎜⎝⎛=
uu
uuuu
Trata-se de uma saturação, com k=2500/25=100 e S=25. Logo a função descritiva vem:
SXXS
XS
XSKN >
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛
π= ,1arcsin2 2
14. B 15. A 16. B 17. A 18. A
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
4
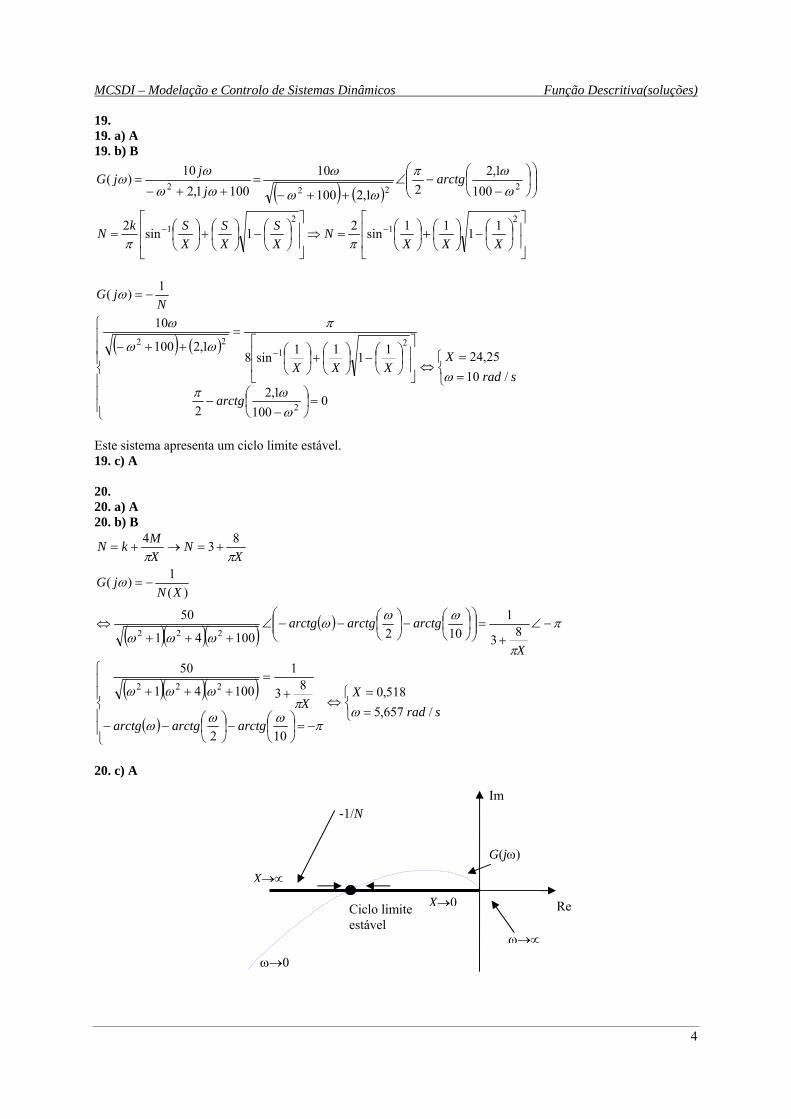
19. 19. a) A 19. b) B
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛−
−∠++−
=++−
=2222 100
1,221,2100
101001,2
10)(ω
ωπ
ωω
ωωω
ωω arctgj
jjG
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=⇒
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛= −−
21
21 1111sin21sin2
XXXN
XS
XS
XSkN
ππ
( ) ( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎩⎨⎧
==
⇔
=⎟⎠⎞
⎜⎝⎛
−−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=++−
−=
−
sradX
arctg
XXX
NjG
/1025,24
0100
1,22
1111sin81,2100
10
1)(
2
21
22
ω
ωωπ
π
ωω
ω
ω
Este sistema apresenta um ciclo limite estável. 19. c) A 20. 20. a) A 20. b) B
( )( )( ) ( ) π
π
ωωωωωω
ω
ππ
−∠+
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−∠
+++⇔
−=
+=→+=
X
arctgarctgarctg
XNjG
XN
XMkN
83
110210041
50
)(1)(
834
222
( )( )( )( )⎪
⎪
⎩
⎪⎪
⎨
⎧
⎩⎨⎧
==
⇔
−=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
+=
+++
sradX
arctgarctgarctg
X /657,5518,0
102
83
1
10041
50222
ωπωωω
πωωω
20. c) A
Re
Im
Ciclo limite estável
X→∝
X→0
-1/N
G(jω)
ω→0
ω→∝
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
5
0
2
4
6
8
10
12
14
16
18
20
5 5,1 5,2 5,3 5,4 5,5 5,6 5,7 5,8 5,9 6 6,1
a
w
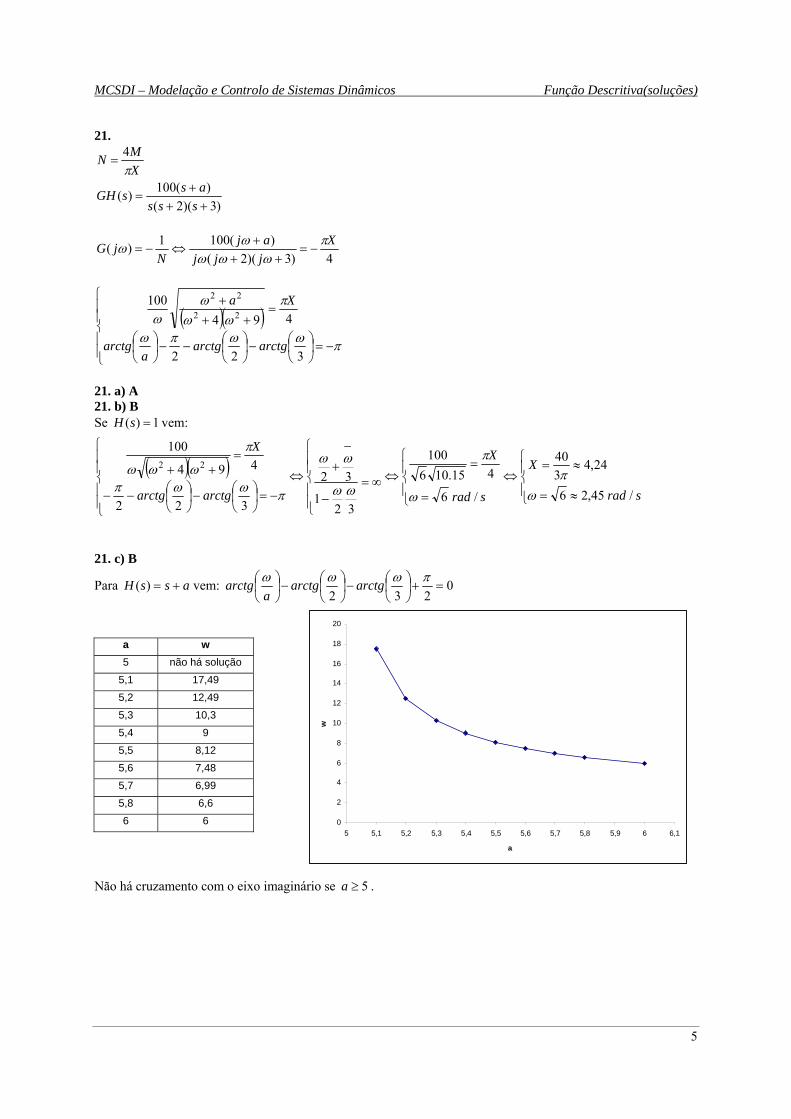
21.
)3)(2()(100)(
4
+++
=
=
sssassGH
XMN
π
4)3)(2()(1001)( X
jjjaj
NjG π
ωωωωω −=
+++
⇔−=
( )( )⎪⎪⎩
⎪⎪⎨
⎧
−=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−⎟
⎠⎞
⎜⎝⎛
=++
+
πωωπω
πωω
ωω
322
494100
22
22
arctgarctga
arctg
Xa
21. a) A 21. b) B Se 1)( =sH vem:
( )( )⎪⎩
⎪⎨
⎧
≈=
≈=⇔
⎪⎪⎩
⎪⎪⎨
⎧
⎪⎩
⎪⎨
⎧
=
=⇔
⎪⎪⎩
⎪⎪⎨
⎧
∞=−
+
−
⇔−=⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
=++
srad
X
srad
X
arctgarctg
X
/45,26
24,4340
/6
415.106100
321
32
322
494
10022
ωπ
ω
π
ωω
ωω
πωωπ
π
ωωω
21. c) B
Para assH +=)( vem: 0232
=+⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛ πωωω arctgarctg
aarctg
a w 5 não há solução
5,1 17,49 5,2 12,49 5,3 10,3 5,4 9 5,5 8,12 5,6 7,48 5,7 6,99 5,8 6,6 6 6
Não há cruzamento com o eixo imaginário se 5≥a .
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
6
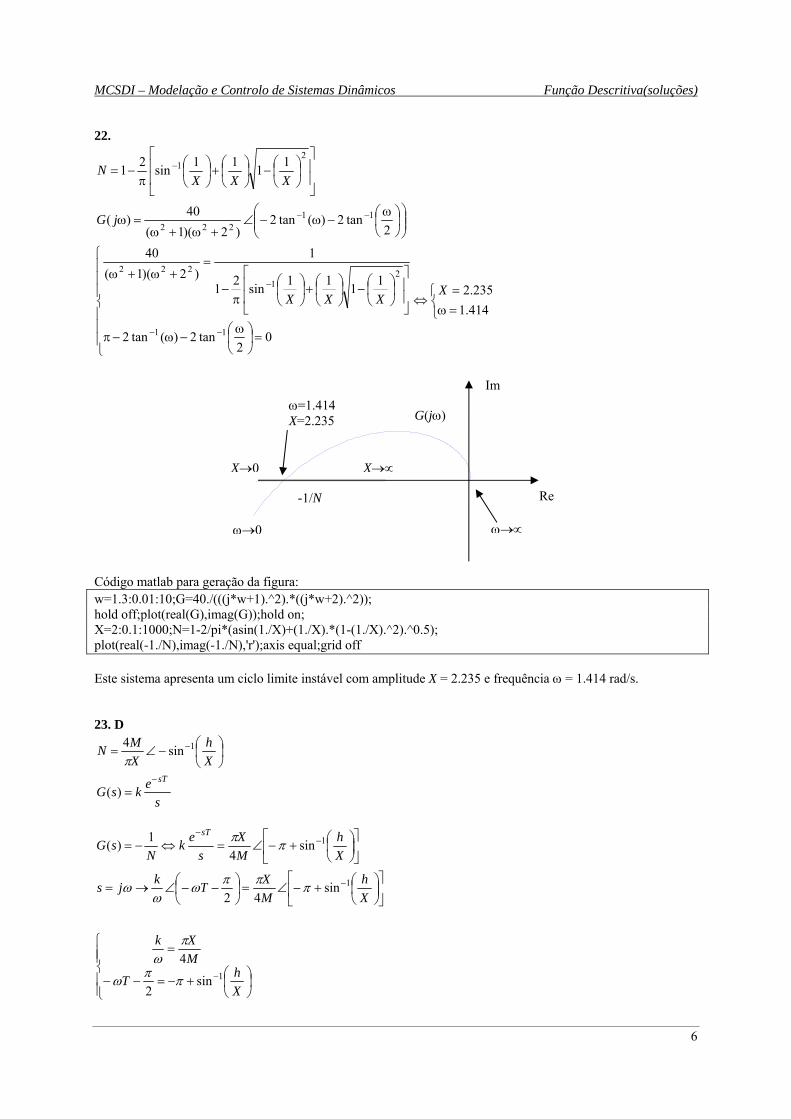
22.
⎩⎨⎧
=ω=
⇔
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=⎟⎠⎞
⎜⎝⎛ ω
−ω−π
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
π−
=+ω+ω
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ ω
−ω−∠+ω+ω
=ω
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
π−=
−−
−
−−
−
414.1235.2
02
tan2)(tan2
1111sin21
1)2)(1(
40
2tan2)(tan2
)2)(1(40)(
1111sin21
11
21
222
11222
21
XXXX
jG
XXXN
Código matlab para geração da figura: w=1.3:0.01:10;G=40./(((j*w+1).^2).*((j*w+2).^2)); hold off;plot(real(G),imag(G));hold on; X=2:0.1:1000;N=1-2/pi*(asin(1./X)+(1./X).*(1-(1./X).^2).^0.5); plot(real(-1./N),imag(-1./N),'r');axis equal;grid off Este sistema apresenta um ciclo limite instável com amplitude X = 2.235 e frequência ω = 1.414 rad/s. 23. D
seksG
Xh
XMN
sT−
−
=
⎟⎠⎞
⎜⎝⎛−∠=
)(
sin4 1
π
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛+−=−−
=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛+−∠=⎟
⎠⎞
⎜⎝⎛ −−∠→=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛+−∠=⇔−=
−
−
−−
XhT
MXk
Xh
MXTkjs
Xh
MX
sek
NsG
sT
1
1
1
sin2
4
sin42
sin4
1)(
ππω
πω
πππωω
ω
ππ
Re
Imω=1.414 X=2.235
X→∝X→0
-1/N
G(jω)
ω→0 ω→∝
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
7
Com k=π, T=1, h=1 e M=1/4 vem:
( ) ⎩⎨⎧
==
⇔⎪⎩
⎪⎨
⎧
+−=−
=⇔
⎪⎪
⎩
⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛+−=−
=
−−
sradXX
X
X
/739,0353,1
sin2
1
1sin2
414
11
ωωπωω
πω
πωπ
24. A
( )41)(
4
+=
=
sksG
XMN
π, com k=2 e M=π
( )( ) ( ) ⎩
⎨⎧
==
⇔⎪⎩
⎪⎨
⎧
=
=⇔
⎪⎩
⎪⎨
⎧
=−
=+→−=
sradX
arctg
X
arctg
X
NjG
/12
4
28
0441
21)(
22/42ωπωωπ
ππ
ωω
25. C
( )21)(
4
+=
=
ssksG
XMN
π
( )( )
( ) ⎪⎩
⎪⎨⎧
=
=⇔
⎪⎩
⎪⎨⎧
=
=⇔⎪⎩
⎪⎨⎧
=
−⇔
⎪⎪⎩
⎪⎪⎨
⎧
−=−−
=+→−=
srad
MkX
sradMXk
arctgarctg
MXk
NjG
/1
2
/142
422
411)(2
ωπ
ω
ππω
πωπ
πωωω
Este sistema apresenta um ciclo limite estável. 26. C
( )31)(
4
+=
=
sksG
XMN
π
( )( )
( )⎪⎩
⎪⎨⎧
−
=⇔
⎪⎩
⎪⎨
⎧
−
=+⇔
⎩⎨⎧
=−
⇔⎪⎩
⎪⎨
⎧
−=−
=+→−= π
π
ωπω
π
ωω 2413/3
341
1)( 2/32/32
MkXMXk
sradarctg
MXk
NjG
27. 27. a)
( )( )( )
42241
10
4)2)(1(10
1
44
22
Xarctgarctg
Xjjj
NGH
XXMN
πωω
π
ωωω
πωωω
ππ
−=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−−−∠
++
−=++
−=
==
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
8
( )( )( )⎪
⎪
⎩
⎪⎪
⎨
⎧
⎪⎩
⎪⎨
⎧
=
=⇔=⇔
⎪⎪⎩
⎪⎪⎨
⎧
∞=−
+
−
⇔−=⎟
⎠⎞
⎜⎝⎛−−−
++=
srad
XX
arctgarctg
X
/2
1,26.32
104
2.1
2
22
41
104 22
ω
π
ωω
ωω
πω
ωπ
ωωω
π
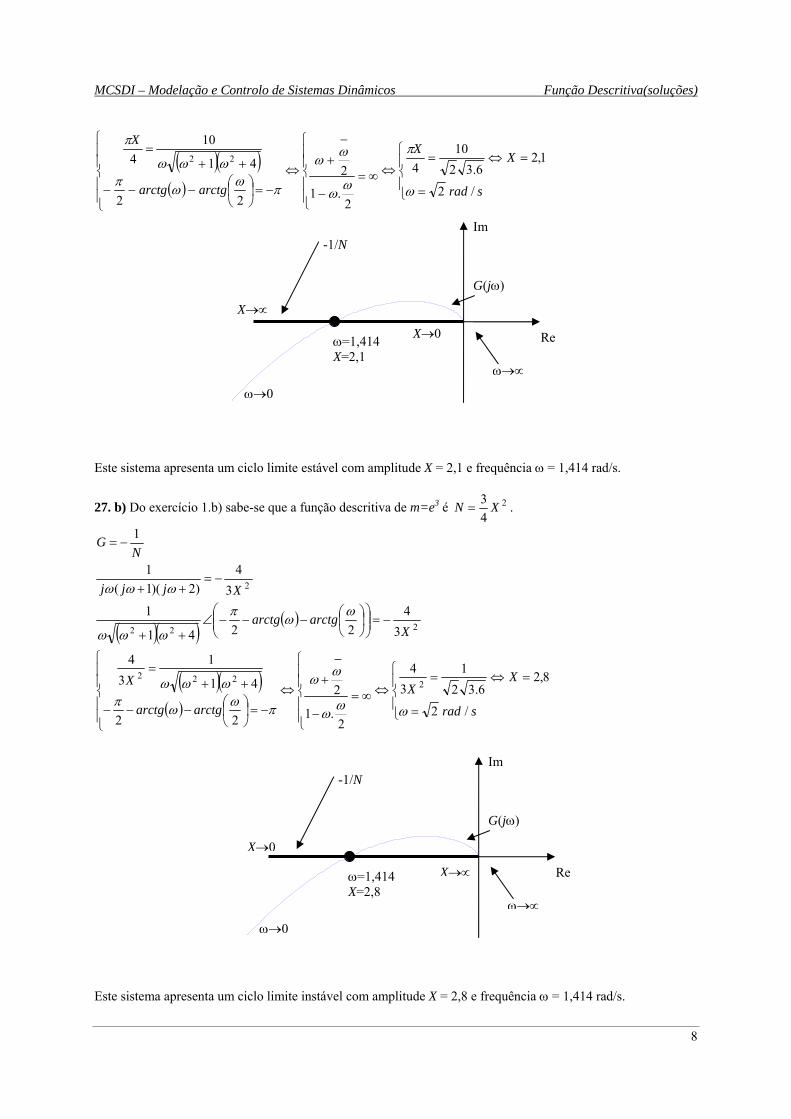
Este sistema apresenta um ciclo limite estável com amplitude X = 2,1 e frequência ω = 1,414 rad/s.
27. b) Do exercício 1.b) sabe-se que a função descritiva de m=e3 é 2
43 XN = .
( )( )( )
( )( )( )⎪
⎪
⎩
⎪⎪
⎨
⎧
⎪⎩
⎪⎨
⎧
=
=⇔=⇔
⎪⎪⎩
⎪⎪⎨
⎧
∞=−
+
−
⇔−=⎟
⎠⎞
⎜⎝⎛−−−
++=
−=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−−−∠
++
−=++
−=
srad
XX
arctgarctg
X
Xarctgarctg
Xjjj
NG
/2
8,26.32
13
4
2.1
2
22
41
13
4
34
2241
13
4)2)(1(
1
1
2222
222
2
ωωω
ωω
πωωπωωω
ωωπ
ωωω
ωωω
Este sistema apresenta um ciclo limite instável com amplitude X = 2,8 e frequência ω = 1,414 rad/s.
Re
Im
ω=1,414 X=2,8
X→∝
X→0
-1/N
G(jω)
ω→0
ω→∝
Re
Im
ω=1,414 X=2,1
X→∝
X→0
-1/N
G(jω)
ω→0
ω→∝
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
9
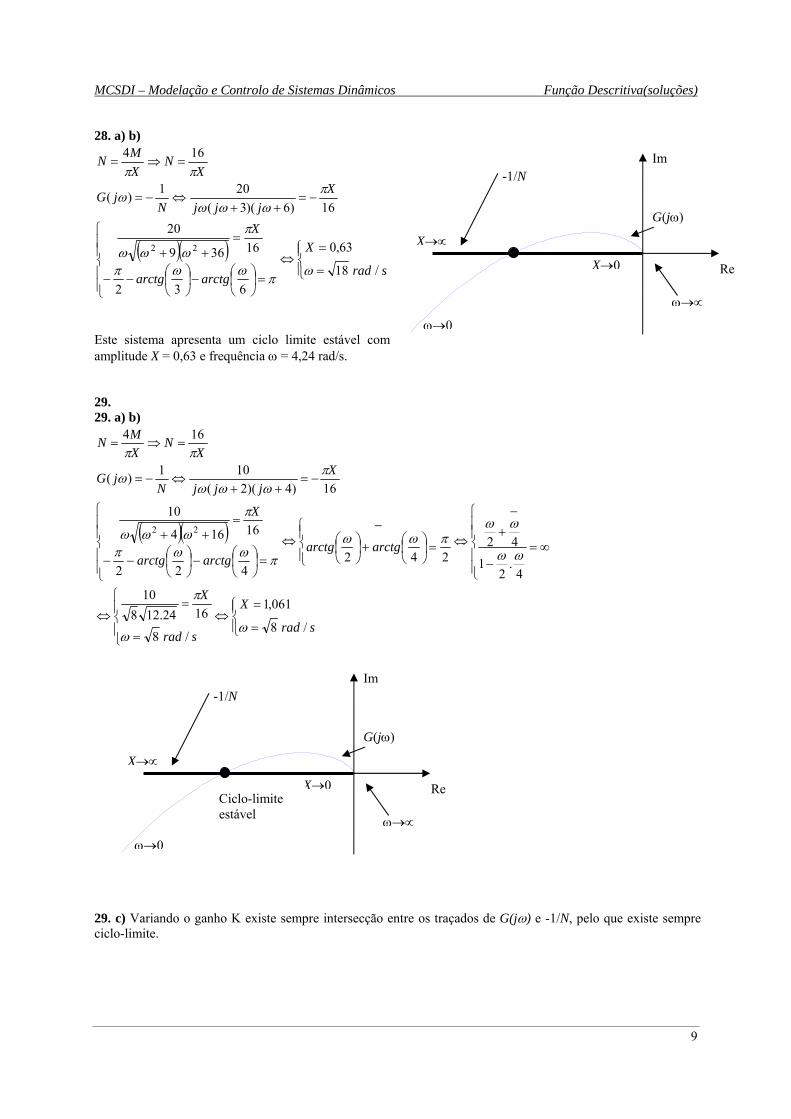
28. a) b)
( )( )⎪⎪⎩
⎪⎪⎨
⎧
⎪⎩
⎪⎨⎧
=
=⇔
=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
=++
−=++
⇔−=
=⇒=
srad
X
arctgarctg
X
XjjjN
jG
XN
XMN
/18
63,0
632
16369
2016)6)(3(
201)(
164
22
ωπωωπ
π
ωωω
πωωω
ω
ππ
Este sistema apresenta um ciclo limite estável com amplitude X = 0,63 e frequência ω = 4,24 rad/s. 29. 29. a) b)
( )( )
⎪⎩
⎪⎨⎧
=
=⇔
⎪⎩
⎪⎨
⎧
=
=⇔
⎪⎪⎩
⎪⎪⎨
⎧
⎪⎪⎩
⎪⎪⎨
⎧
∞=−
+
−
⇔⎪⎩
⎪⎨⎧
=⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
−⇔
=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
=++
−=++
⇔−=
=⇒=
srad
X
srad
X
arctgarctgarctgarctg
X
XjjjN
jG
XN
XMN
/8
061,1
/8
1624.12810
4.
21
42242
422
16164
10
16)4)(2(101)(
164
22
ωω
π
ωω
ωωπωω
πωωπ
π
ωωω
πωωω
ω
ππ
29. c) Variando o ganho K existe sempre intersecção entre os traçados de G(jω) e -1/N, pelo que existe sempre ciclo-limite.
Re
Im
X→∝
X→0
-1/N
G(jω)
ω→0
ω→∝
Re
Im
X→∝
X→0
-1/N
G(jω)
ω→0
ω→∝
Ciclo-limite estável
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
10
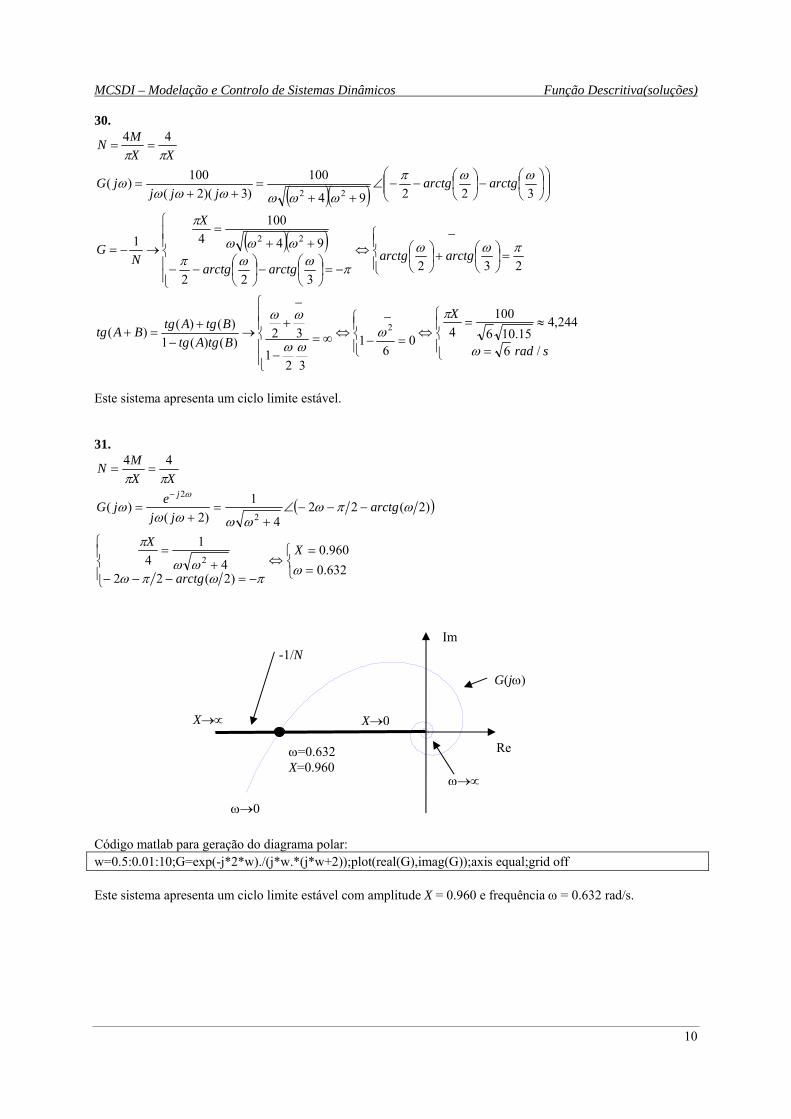
30.
( )( )
( )( )⎪⎪⎩
⎪⎪⎨
⎧
⎪⎩
⎪⎨⎧
=⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
−⇔
−=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
++=
→−=
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−∠
++=
++=
==
232322
94
10041
32294
100)3)(2(
100)(
44
22
22
πωω
πωωπωωω
π
ωωπ
ωωωωωωω
ππ
arctgarctgarctgarctg
X
NG
arctgarctgjjj
jG
XXMN
⎪⎩
⎪⎨⎧
=
≈=⇔
⎪⎪⎩
⎪⎪⎨
⎧
⎪⎩
⎪⎨⎧
=−
−⇔∞=
−
+
−
→−
+=+
srad
X
BtgAtgBtgAtgBAtg
/6
244,415.106
10040
61
321
32)()(1)()()( 2
ω
πω
ωω
ωω
Este sistema apresenta um ciclo limite estável. 31.
( )
⎪⎩
⎪⎨⎧
⎩⎨⎧
==
⇔−=−−−
+=
−−−∠+
=+
=
==
−
632.0960.0
)2(224
14
)2(224
1)2(
)(
44
2
2
2
ωπωπωωω
π
ωπωωωωω
ω
ππω
X
arctg
X
arctgjj
ejG
XXMN
j
Código matlab para geração do diagrama polar: w=0.5:0.01:10;G=exp(-j*2*w)./(j*w.*(j*w+2));plot(real(G),imag(G));axis equal;grid off Este sistema apresenta um ciclo limite estável com amplitude X = 0.960 e frequência ω = 0.632 rad/s.
Re
Im
ω=0.632 X=0.960
X→∝ X→0
-1/N
G(jω)
ω→0
ω→∝

MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
11
32. 32. a)
Resposta em frequência em malha fechada:)()(1
)()()(
ωωω
jHjNGjNG
sRsC
+=
A equação característica é: 0)()(1 =+ ωω jHjNG ou N
jHjG 1)()( −=ωω . Se esta equação for satisfeita, então
o sistema apresenta um ciclo limite com amplitude X e frequência ω.
O bloco não linear é descrito pela função descritiva: XAkN
π4
+= . Substituindo os valores vem: X
Nπ41+= .
( )( )X
jjjNjHjG
πωωω
ωω 41
151
51)()(+
−=++
⇔−=
Determinação do ciclo limite:
( ) ⎪⎪⎩
⎪⎪⎨
⎧
=
=⇔+
=⇔
⎪⎪
⎩
⎪⎪
⎨
⎧
=⎟⎠⎞
⎜⎝⎛−−−
+=
++
→
→
srad
X
Xarctgarctg
Xfasedecondição
módulodecondição
/5
255,041
13065
5
52
41
1
251
522
ωπ
πωωππ
ωωω
32. b) Ciclo limite estável. 33. 33. a)
( )( )X
jjjNjG
πωωω
ω 161
132
201)(+
−=++
⇔−=
⎪⎪⎩
⎪⎪⎨
⎧
=
=⇔+
=⇔
⎪⎩
⎪⎨
⎧
=−
−⇔
⎪⎪
⎩
⎪⎪
⎨
⎧
∞=−
+
−
⇔
⎪⎪
⎩
⎪⎪
⎨
⎧
=⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−
+=
++
srad
X
Xarctgarctg
X
/6
63,100161
115106
20
06
1
3.
21
32
322
161
1
94
20
222
ωπω
ωω
ωω
πωωππ
ωωω
33. b) Ciclo limite estável. 33. c) Aumentando o ganho K1 atinge-se uma situação em que as curvas de G(jω) e -1/N deixam de se intersectar, logo deixa de existir ciclo limite. 34.
3)1(
32
)(1
)1(3)(
125.1175.012
,4112
22
2
2
22
2
22
−+=−⇒
+=
−⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−=
+>−⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛ +
−+⎟⎠⎞
⎜⎝⎛ −
−=
ωωω
ωωωω
ππ
ππ
jjGjj
jG
Xj
XXXN
BAXXACj
XAB
XAB
XCN
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
12
⎩⎨⎧
==
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−=−
=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−
−=⇔=+
155.2882.0
3)1(1
3225.1175.012
)(10)(1
2
2
222
X
X
XXX
jGNNjG
rad/s ω
ωωπ
ωπ
ωω
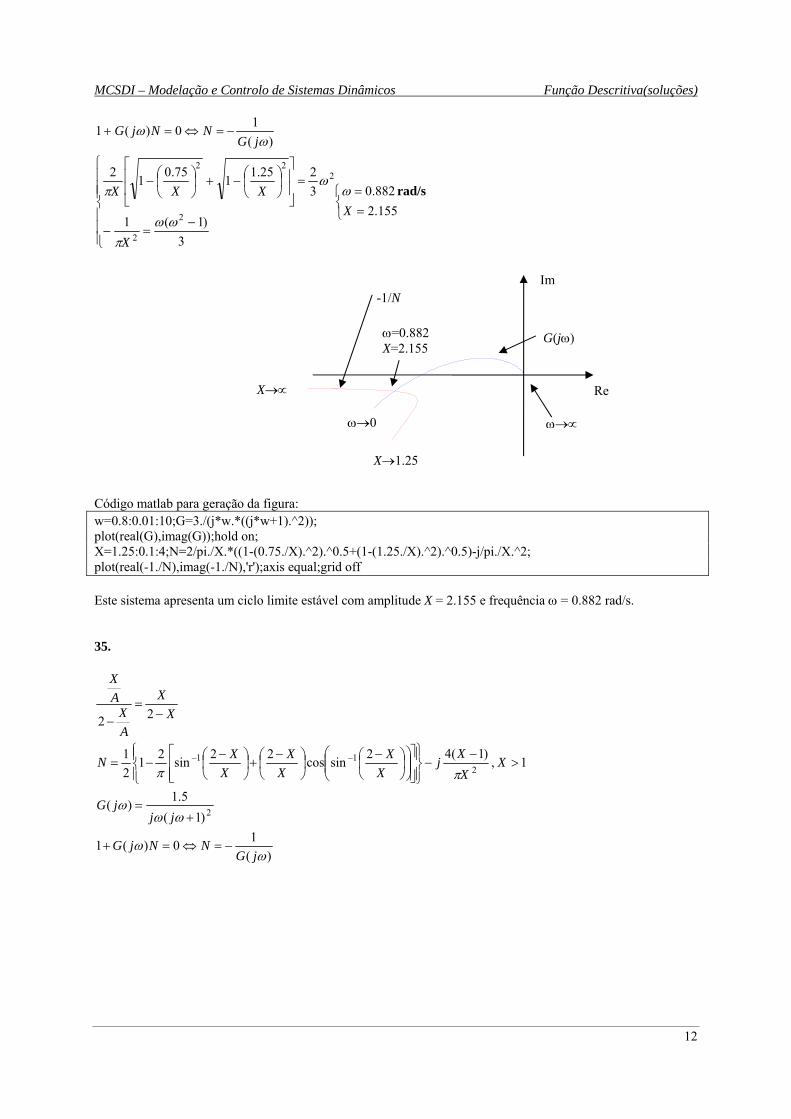
Código matlab para geração da figura: w=0.8:0.01:10;G=3./(j*w.*((j*w+1).^2)); plot(real(G),imag(G));hold on; X=1.25:0.1:4;N=2/pi./X.*((1-(0.75./X).^2).^0.5+(1-(1.25./X).^2).^0.5)-j/pi./X.^2; plot(real(-1./N),imag(-1./N),'r');axis equal;grid off Este sistema apresenta um ciclo limite estável com amplitude X = 2.155 e frequência ω = 0.882 rad/s. 35.
)(10)(1
)1(5.1)(
1,)1(42sincos22sin2121
22
2
211
ωω
ωωω
ππ
jGNNjG
jjjG
XXXj
XX
XX
XXN
XX
AX
AX
−=⇔=+
+=
>−
−⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
−=
−=
−
−−
Re
Im
ω=0.882 X=2.155
X→∝
X→1.25
-1/N
G(jω)
ω→0 ω→∝
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
13
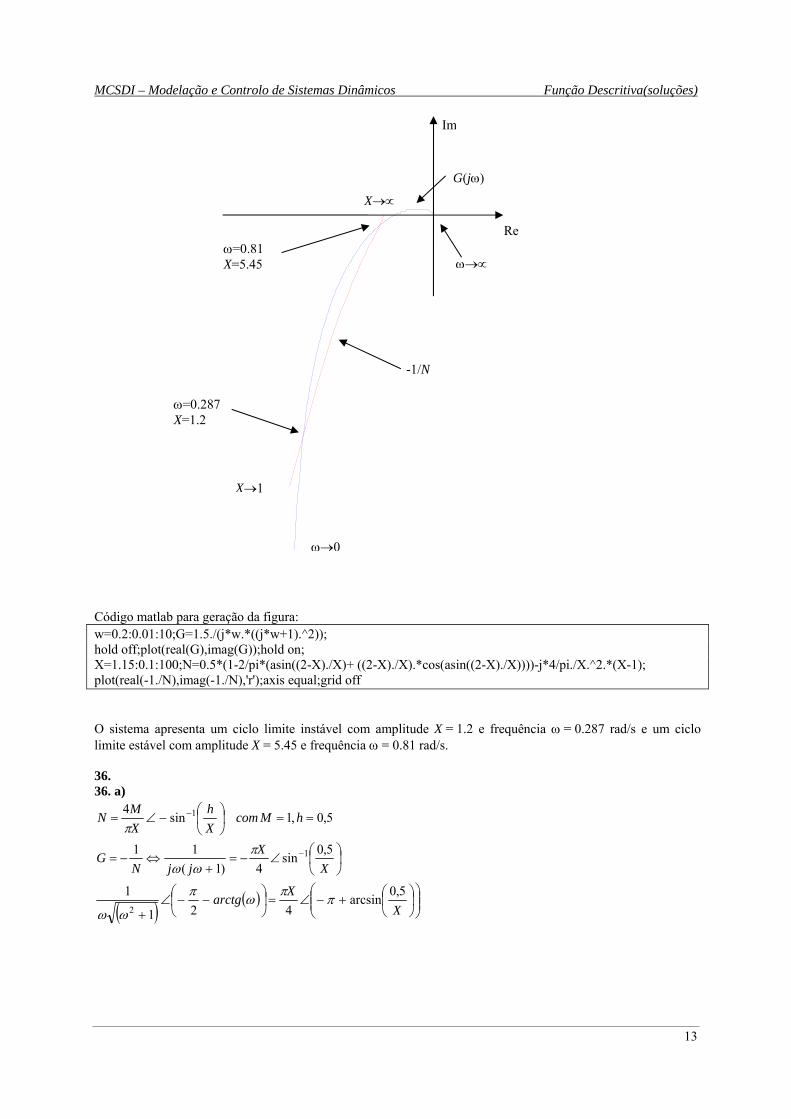
Código matlab para geração da figura: w=0.2:0.01:10;G=1.5./(j*w.*((j*w+1).^2)); hold off;plot(real(G),imag(G));hold on; X=1.15:0.1:100;N=0.5*(1-2/pi*(asin((2-X)./X)+ ((2-X)./X).*cos(asin((2-X)./X))))-j*4/pi./X.^2.*(X-1); plot(real(-1./N),imag(-1./N),'r');axis equal;grid off O sistema apresenta um ciclo limite instável com amplitude X = 1.2 e frequência ω = 0.287 rad/s e um ciclo limite estável com amplitude X = 5.45 e frequência ω = 0.81 rad/s. 36. 36. a)
( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛+−∠=⎟⎠
⎞⎜⎝
⎛ −−∠+
⎟⎠⎞
⎜⎝⎛∠−=
+⇔−=
==⎟⎠⎞
⎜⎝⎛−∠=
−
−
XXarctg
XX
jjNG
hMcomXh
XMN
5,0arcsin421
1
5,0sin4)1(
11
5,0,1sin4
2
1
1
ππ
ωπ
ωω
πωω
π
Im
Reω=0.81 X=5.45
X→∝
X→1
-1/N
G(jω)
ω→0
ω→∝
ω=0.287 X=1.2
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
14
( )( )⎪
⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛+−=−−
=+
Xarctg
X
5,0arcsin2
41
12
πωπ
π
ωω
( ) 05,05,0
5,0
5,01
5,0
5,0
5,0
5,02
22
22
22
22=−−⇒∞=
−−
−+
⇔⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−+= ω
ω
ωπω X
X
X
Xarctgarctg
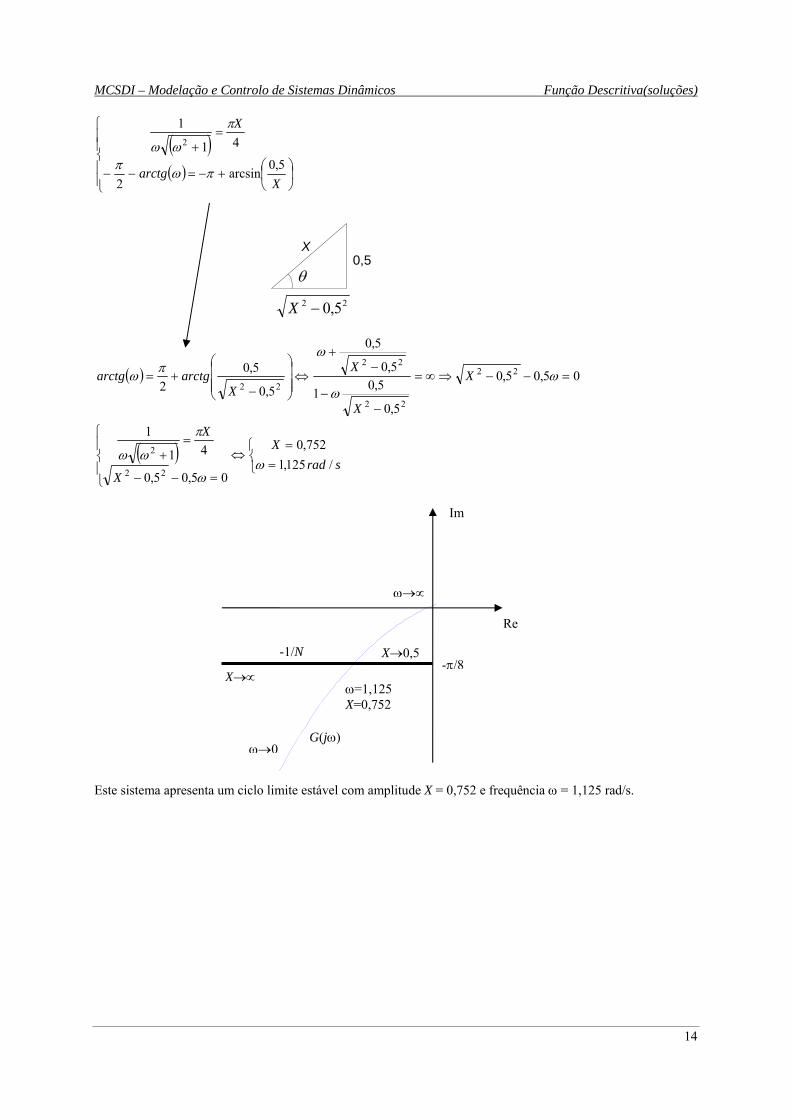
( )⎩⎨⎧
==
⇔⎪⎩
⎪⎨
⎧
=−−
=+
sradX
X
X
/125,1752,0
05,05,0
41
1
22
2
ωω
π
ωω
Este sistema apresenta um ciclo limite estável com amplitude X = 0,752 e frequência ω = 1,125 rad/s.
θ22 5,0−X
X0,5
Re
Im
ω=1,125 X=0,752
X→∝
X→0,5 -1/N
G(jω) ω→0
ω→∝
-π/8
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
15
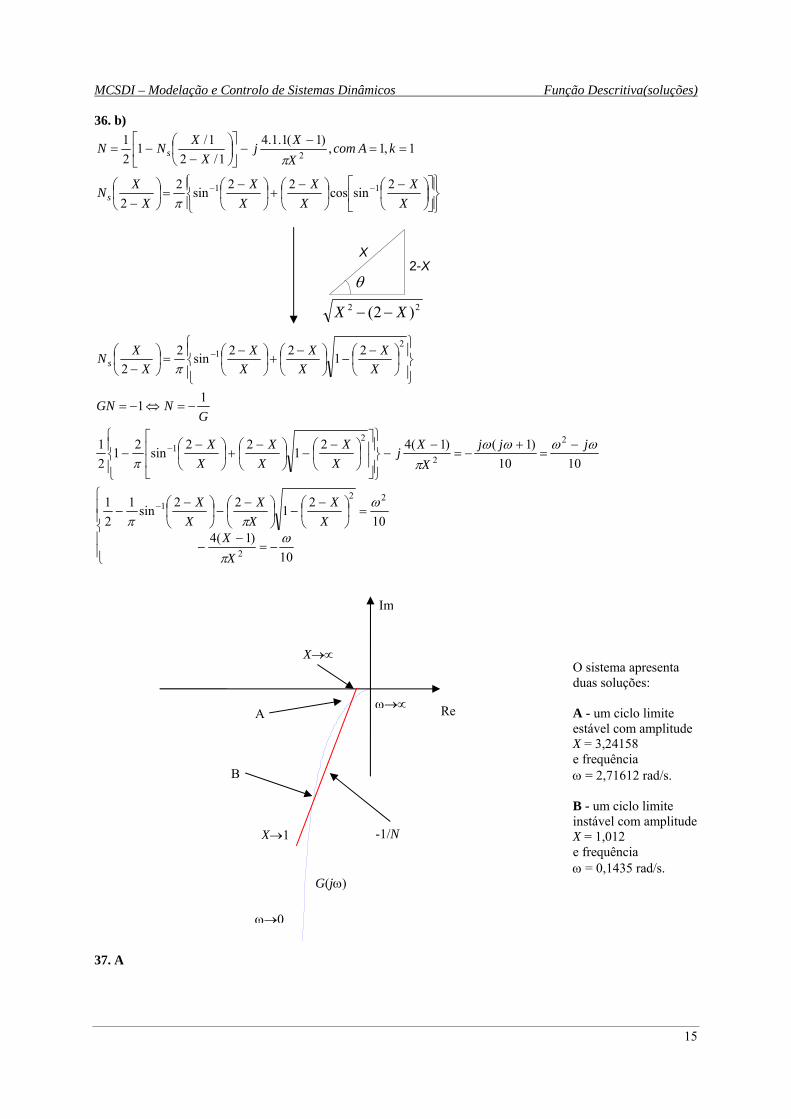
36. b)
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
=⎟⎠⎞
⎜⎝⎛
−
==−
−⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
−−=
−−
XX
XX
XX
XXN
kAcomXXj
XXNN
s
s
2sincos22sin22
1,1,)1(1.1.41/2
1/121
11
2
π
π
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎠⎞
⎜⎝⎛ −
−⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
=⎟⎠⎞
⎜⎝⎛
−−
21 2122sin2
2 XX
XX
XX
XXN s π
⎪⎪⎩
⎪⎪⎨
⎧
−=−
−
=⎟⎠⎞
⎜⎝⎛ −
−⎟⎠⎞
⎜⎝⎛ −
−⎟⎠⎞
⎜⎝⎛ −
−
−=
+−=
−−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛ −
−⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
−
−=⇔−=
−
−
10)1(4
102122sin1
21
1010)1()1(42122sin21
21
11
2
221
2
2
21
ωπ
ωππ
ωωωωππ
XX
XX
XX
XX
jjjX
XjX
XX
XX
X
GNGN
O sistema apresenta duas soluções: A - um ciclo limite estável com amplitude X = 3,24158 e frequência ω = 2,71612 rad/s. B - um ciclo limite instável com amplitude X = 1,012 e frequência ω = 0,1435 rad/s.
37. A
θ22 )2( XX −−
X2-X
Im
ReA
X→∝
X→1 -1/N
G(jω)
ω→0
ω→∝
B
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
16
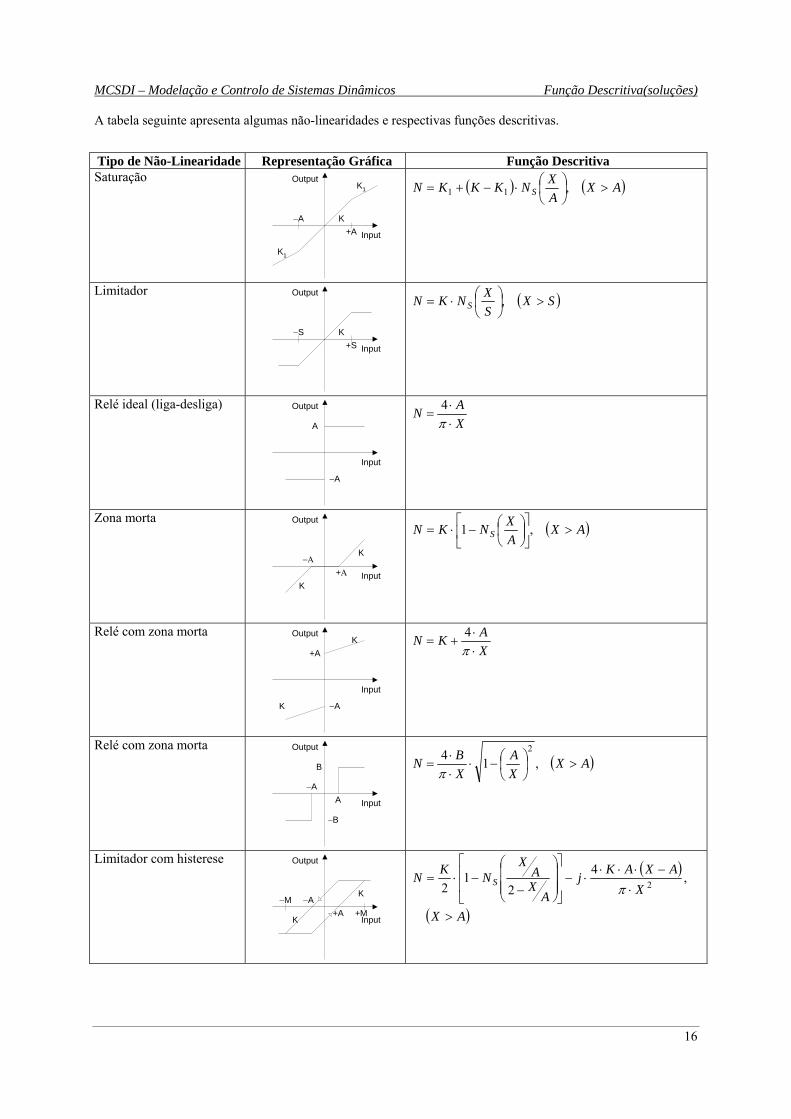
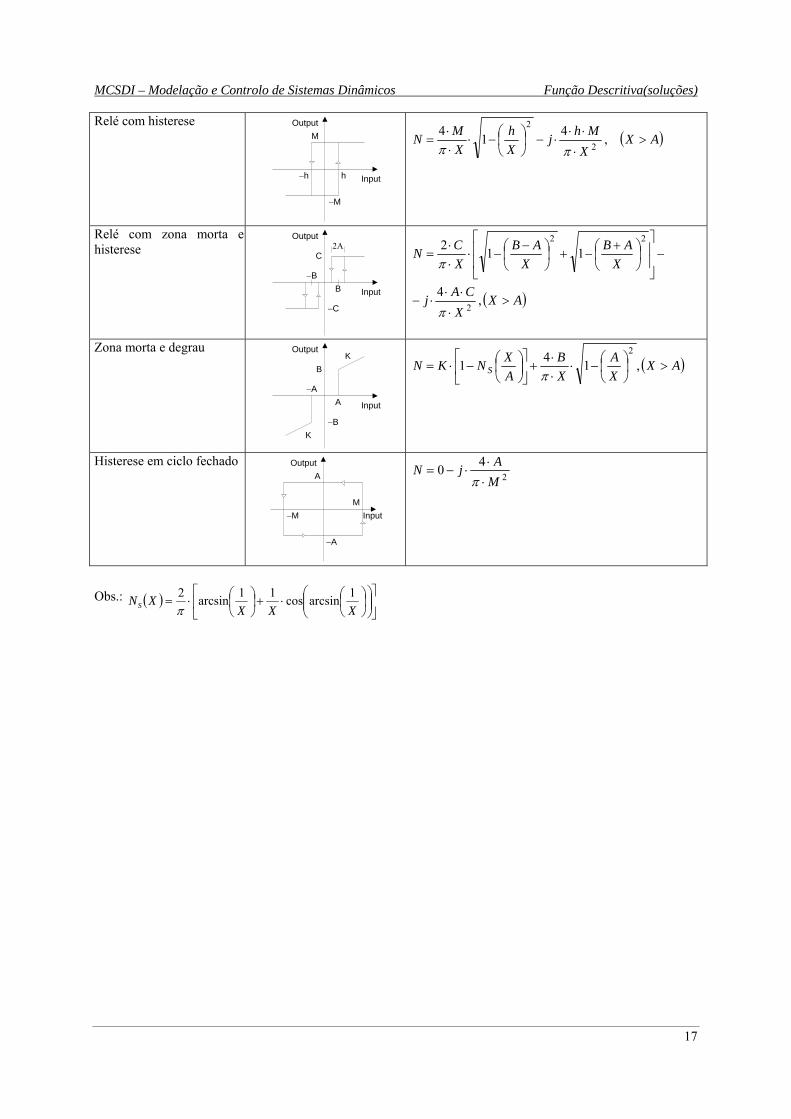
A tabela seguinte apresenta algumas não-linearidades e respectivas funções descritivas. Tipo de Não-Linearidade Representação Gráfica Função Descritiva Saturação
Input
Output
+A−A K
K1
K1
( ) ( )AXAXNKKKN S >⎟
⎠⎞
⎜⎝⎛⋅−+= ,11
Limitador
Input
Output
+S−S K
( )SXSXNKN S >⎟
⎠⎞
⎜⎝⎛⋅= ,
Relé ideal (liga-desliga)
Input
Output
A
−A
XAN
⋅⋅
=π4
Zona morta
Input
Output
+Α−Α
K
K
( )AXAXNKN S >⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−⋅= ,1
Relé com zona morta
Input
Output
+A
−A
K
K
XAKN
⋅⋅
+=π4
Relé com zona morta
Input
Output
B
−B
−AA
( )AXXA
XBN >⎟
⎠⎞
⎜⎝⎛−⋅
⋅⋅
= ,14 2
π
Limitador com histerese
Input
Output
+M−M
K
K
−A+A
( )
( )AX
XAXAKj
AXA
XNKN S
>
⋅
−⋅⋅⋅⋅−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−⋅= ,4
21
2 2π
MCSDI – Modelação e Controlo de Sistemas Dinâmicos Função Descritiva(soluções)
17
Relé com histerese
Input
OutputM
−M
−h h
( )AXX
MhjXh
XMN >
⋅
⋅⋅⋅−⎟
⎠⎞
⎜⎝⎛−⋅
⋅⋅
= ,4142
2
ππ
Relé com zona morta e histerese
Input
Output
C
−C
−BB
2Α
( )AXX
CAj
XAB
XAB
XCN
>⋅
⋅⋅⋅−
−⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛ +
−+⎟⎠⎞
⎜⎝⎛ −
−⋅⋅⋅
=
,4
112
2
22
π
π
Zona morta e degrau
Input
Output
B
−B
−AA
K
K
( )AXXA
XB
AXNKN S >⎟
⎠⎞
⎜⎝⎛−⋅
⋅⋅
+⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−⋅= ,141
2
π
Histerese em ciclo fechado
Input
OutputA
−A
−MM
240
MAjN
⋅⋅
⋅−=π
Obs.: ( ) ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛⋅+⎟
⎠⎞
⎜⎝⎛⋅=
XXXXNS
1arcsincos11arcsin2π