Embed Size (px)
Citation preview

METODOLOGIA DE OTIMIZACAO PARA ALINHAMENTO DE EIXOS
PROPULSORES
Lucas Marques Prata Mesiano
Projeto de Graduação apresentado no Curso de
Engenharia Naval e Oceânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Engenheiro.
Orientador: Luiz Antonio Vaz Pinto, D. Sc.
Co-orientador: Ricardo Homero R. Gutiérrez, D. Sc
Rio de Janeiro
Setembro de 2015

ii
Mesiano, Lucas
Metodologia de Otimização para Alinhamento de Eixos
Propulsores/Lucas Marques Prata Mesiano. - Rio de Janeiro: UFRJ/
Escola Politécnica, 2015.
VII, 37 p.: il.; 29,7 cm.
Orientador:
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Naval e Oceânica, 2015
Referências Bibliográficas: p. 38.
1. Alinhamento de Eixo. 2. Otimização. 3. Algoritmo Genético. I.
Vaz Pinto, Luiz Antonio. II. Universidade Federal do Rio de Janeiro,
Escola Politécnica, Curso de Engenharia Naval e Oceânica. III.
Metodologia de Otimização para Alinhamento de Eixos
Propulsores.

iii
DEDICATÓRIA
.
Aos meus pais, Marcio e Doriene,
que me amaram, respeitaram e inspiraram
ao longo de toda minha vida.
Sem este apoio nada seria possível.

iv
AGRADECIMENTOS
Aos meus familiares, em especial aos meus pais e a minha irmã, pelo carinho,
compreensão e apoio incondicional.
Aos meus amigos que entraram na minha vida por escolha, se mantiveram ao meu
lado por afinidade e se tornaram parte da minha família.
A toda equipe do LEDAV, em especial ao meu co-orientador Ricardo Homero
Ramírez Gutiérrez, pelo acolhimento, ajuda e ensinamentos que tornaram este projeto
possível.
Finalmente, a Petrobras pela ajuda financeira concedida para que eu pudesse me
dedicar integralmente a este projeto.

v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Naval e Oceânico.
Metodologia de Otimização para Alinhamento de Eixos Propulsores
Lucas Marques Prata Mesiano
Setembro/2016
Orientador:
Curso: Engenharia Naval e Oceânica
Este projeto busca propor e testar uma metodologia de otimização para o
alinhamento de eixos propulsivos, utilizando um Software de elementos finitos e o
algoritmo genético como método de otimização.
Para realizar os testes desta metodologia foram utilizados três casos de estudo,
retirados da bibliografia. Os casos de estudo tiveram seus modelos e sua otimização
executados no Software “Ansys”. Os resultados obtidos foram comparados com os
resultados já conhecidos na bibliografia.
Após as análises descobriu-se que a metodologia proposta é viável e pode
contribuir para que melhores soluções para o problema de alinhamento de eixos
propulsivos sejam encontradas.
Palavras-chave: Alinhamento de Eixo, Otimização, Algoritmo genético.

vi
Abstract of Undergraduate Project presented to POLI/UFRJ as part of the fulfillment of
the requirements for the degree of Engineer.
Optimization Methodology for Shafting Alignment
Lucas Marques Prata Mesiano
September/2016
Advisor:
Course: Ocean Engineering
The current project aims to propose and test a methodology of optimization for
shafting alignment, using a finite elements Software and the genetic algorithm as an
optimization method.
In order to perform these tests, three cases of study from the bibliography were
utilized. The cases of study had their models and optimization executed in the software
“Ansys”. The results obtained were compared with the ones already known from the
bibliography.
After analysis it was found that the proposed methodology is viable and can
contribute for finding better solutions for the shaft alignment problem.
Keywords: Shaft Alignment, Optimization, Genetic Algorithm.

vii
INDICE
1 - INTRODUÇÃO ..................................................................................................... 1
2 - Revisao Bibliográfica ............................................................................................ 2 3 - FUNDAMENTOS TEÓRICOS ............................................................................ 3
3.1 - Alinhamento de Eixos .................................................................................... 3 3.1.1 - Fundamentos Aplicados no Cálculo do Alinhamento ....................................... 3
3.2 - Métodos de Otimização .................................................................................. 6
3.2.1 - MOGA (Multi-Objective Genetic Algorithm) ................................................. 12 4 - MEtodologia PARA O ALINHAMENTO ÓTIMO DO EIXO PROPULSOR .. 13
4.1 - Fluxograma................................................................................................... 15 4.2 - Implementação no Ansys ............................................................................. 17 4.3 - Verificação do Método ................................................................................. 18
5 - ESTUDO DE CASO ........................................................................................... 20
5.1 - Navio Tanque a Turbina ............................................................................... 20
5.1.1 - Modelagem ...................................................................................................... 21 5.1.2 - Resultados ........................................................................................................ 22
5.2 - Casco B72 .................................................................................................... 25 5.2.1 - Modelagem ...................................................................................................... 26
5.2.2 - Resultados ........................................................................................................ 28 5.3 - Corveta Classe “Imperial Marinheiro” ......................................................... 31
5.3.1 - Modelagem ...................................................................................................... 31 5.3.2 - Resultados ........................................................................................................ 34 6 - CONCLUSÕES E RECOMENDACOES ........................................................... 36
7 - REFERÊNCIAS BIBLIOGRÁFICAS ................................................................ 37

1
1 - INTRODUÇÃO
O problema no alinhamento de eixos é um famoso conhecido da maioria dos
projetistas. Apesar da existência de diversos estudos nesta área, a quebra de eixos
propulsivos devido ao carregamento desequilibrado dos mancais é até hoje um problema
muito comum e recorrente em muitas embarcações.
A recente quebra de eixos de bombas em plataformas da empresa StatOil,
repetidas vezes, acabou por realçar a importância ainda existente no estudo e exploração
de soluções possíveis para este problema, motivando também o tema deste trabalho.
Os estudos nesta área, apesar de já terem em sua maioria incorporado instrumentos
recentes como a teoria de elementos finitos, ainda possibilitam melhorias. A incorporação
de novas tecnologias e campos de estudo junto ao problema de alinhamento de eixos
propulsivos se faz necessária na tentativa de facilitar sua resolução.
A aplicação de métodos de otimização como tentativa de encontrar o conjunto de
melhores soluções para cada situação de alinhamento é uma tendência mundial que pode
render frutos de grande valor a este campo de estudo.
O objetivo do presente trabalho é então desenvolver uma metodologia de
otimização para problemas de alinhamentos de eixos propulsivos, testa-la e valida-la
como solução viável de resolução do problema. O teste e validação desta metodologia se
dará através de três estudos de casos presentes na literatura, onde será demonstrado sua
possível superioridade as resoluções tradicionais, onde não se utilizava um método de
otimização.

2
2 - REVISAO BIBLIOGRÁFICA
Batista [3] apresenta a forma clássica e a teoria geral para o alinhamento de eixos,
detalhando os dois principais métodos de cálculo para o alinhamento (o primeiro
utilizando o método dos três momentos e a equação geral dos momentos em cada apoio,
e o segundo utilizando a matriz dos coeficientes de influência).
Utiliza o Método de Elementos Finitos no cálculo do alinhamento, mostrando que
o método pode ser vantajoso comparando com resultados originais. Realiza o cálculo de
alinhamento para alguns navios e analisa seus resultados.
Apresenta também a técnica da extensometria e a utiliza em na execução do
alinhamento em um modelo real.
Šverko [2] apresenta o Algoritmo Genético como forma de encontrar um conjunto
de soluções adequadas para o posicionamento de mancais de forma a obter o menor
carregamento em cada um.
Justifica o uso do algoritmo genético e realiza o alinhamento utilizando um
algorítmo genético simples e a matriz dos coeficientes de influência.
Nippon Kaiji Kyokai [1] apresenta um guia geral sobre alinhamentos de eixos.
Aborda como o alinhamento é calculado, modelado, executado e verificado em sua
maneira clássica, além de abordar quais outros aspectos (deformação térmica e
deformação do casco) devem ser considerados no alinhamento de eixos propulsivos.
Vulić et. al. [4] apresenta um método de cálculo de alinhamento utilizando matriz
de transferência, além de apresentar o método GAP e SAG para realização do
alinhamento à bordo. Resume os critérios de validação e aceitação do alinhamento.
3
3 - FUNDAMENTOS TEÓRICOS
3.1 - Alinhamento de Eixos
Este tópico foi escrito baseado em informações contidas na tese de mestrado
Analise do Alinhamento de Eixos Propulsores [3].
O eixo além de ser um elemento de transmissão de potência é também uma viga,
sendo, no caso da linha de eixo, classificado como uma viga hiperestática.
O carregamento desta viga, na condição estática, é composto por: peso próprio da
viga, peso dos diversos equipamentos, peso do hélice, empuxo da água do mar e do óleo
lubrificante.
Como uma viga, o eixo deve resistir a flexão. Em embarcações pequenas os efeitos
da flexão são desprezíveis e nos navios maiores acontece exatamente o contrário.
3.1.1 - Fundamentos Aplicados no Cálculo do Alinhamento
Método da Rigidez:
Este método de solução do problema de estruturas hiperestáticas
utiliza os coeficientes de rigidez, que permitem formar um sistema de
equações do tipo:
𝑅𝑖 = 𝑅𝑎𝑖 + 𝑆𝑖𝑗𝐷𝑗 ( Eq 1)
Onde, para n apoios ou mancais:
i é o índice referente ao apoio em questão
𝑅𝑖 é o vetor das reações finais
𝑅𝑎𝑖 é o vetor das reações iniciais (referentes ao carregamento e
peso próprio)
𝑆𝑖𝑗 é a rigidez do elemento i provocado pelo deslocamento em
um elemento j
j é o índice dos apoios que sofrem deslocamento
𝐷𝑗 é o vetor do deslocamento nos apoios
Através do qual a solução do problema é obtida.

4
Coeficientes de Rigidez/ Influência:
São as forças e momentos provocados nos apoios de uma viga
hiperestática, em função de um deslocamento generalizado unitário
aplicado em um dos apoios. Estes valores dependem da rigidez (EI) e do
comprimento (L) da viga. A rigidez dos diversos membros da viga formam
a matriz de rigidez[𝑆𝑖𝑗].
A proporcionalidade entre tensão e deformação, que forma a base
dos estudos da linha elástica, permite a utilização dos chamados
coeficientes de influência, para exprimir a linearidade entre as reações e
deslocamentos nos apoios. Os coeficientes de influência permitem
escrever a seguinte transformação linear:
𝑅𝑖 = 𝐶𝑖𝑗 × 𝐷𝑗 (Eq 2)
Onde, para n apoios ou mancais:
i é o índice referente ao apoio em questão
𝑅𝑖 é o vetor das reações nos apoios
𝐶𝑖𝑗 é a matriz dos coeficientes de influência do mancal i em relação
ao mancal j
𝐷𝑗 é o vetor dos deslocamentos nos apoios

5
Figura 1 – Obtenção dos coeficientes de Influencia ou de Rigidez
A Figura 1 acima ilustra a forma de obtenção dos coeficientes de
influência. Com a finalidade de obter estes coeficientes, variamos, um a um, o
deslocamento de cada mancal. Esta variação ocorre sem nenhuma carga aplicada
ao eixo, nem mesmo o peso próprio. Os valores resultantes das reações nos
mancais, para um certo mancal deslocado, formam as linhas da matriz de
influência.
A figura abaixo ilustra a equação encontrada acima, onde a primeira viga
representa a condição inicial, e a segunda representa a condição final com reações
R1 e R2, obtidas aplicando-se um deslocamento D2 no apoio 2.

6
Figura 2 – Ilustração da Equação 2
3.2 - Métodos de Otimização
Para suporte ao desenvolvimento deste tópico foi utilizado o “Thermal
Measurements and Inverse Techniques” [5].
A busca a ser feita para o melhor posicionamento dos mancais deve ser feita
através de um método de otimização. Os métodos de otimização existentes se separam
em dois tipos: os métodos determinísticos e os métodos estocásticos.
Os métodos determinísticos são utilizados para se minimizar problemas não
lineares e geralmente se baseiam em estabelecer um procedimento iterativo, que após um
certo número de iterações irá convergir para o mínimo da função objetivo. Os métodos
determinísticos convergem para pontos estacionários (pontos onde o gradiente da função
é nulo) e a convergência para um mínimo global só é garantida se a função objetivo não
possui outros pontos estacionários. Caso contrário, estes métodos podem encontrar
apenas mínimos locais.
Os métodos estocásticos, em contraste com os métodos determinísticos, não se
baseiam geralmente em fortes bases matemáticas e não fazem uso do gradiente e da
segunda derivada da função objetivo. Estes métodos tentam imitar a natureza para
encontrar o mínimo da função objetivo.
A natureza do problema de alinhamento de eixos é estocástica e multimodal, por
isso o método escolhido para realizar esta otimização deverá ser um método estocástico.

7
Alguns métodos estocásticos de otimização são explicados abaixo:
Algoritmo Genético:
O algoritmo genético é um método heurístico global de otimização
baseado no processo de seleção natural.
Iniciando-se por uma população randomicamente gerada de pontos
candidatos, o algoritmo busca produzir melhores pontos na geração
seguinte. Isto ocorre através da troca de informação genética entre os
pontos da atual geração, no que é conhecido como operação de
cruzamento, ou “crossover”. Os pontos melhorados resultantes deste
cruzamento são utilizados então para gerar a próxima geração.
O algoritmo genético básico trabalha com uma coleção ou
população de soluções candidatas. O algoritmo trabalha de forma iterativa.
A cada iteração, também chamada de geração, três operadores são
aplicados a toda a população de pontos. Essas operações são: seleção,
cruzamento e mutação. Com o intuito de que esses operadores sejam
efetivos, cada candidato a solução deve ser representado por uma coleção
de parâmetros finitos, chamados de genes. Cada solução deve ter uma
sequência única desses parâmetros que o definem. Esta coleção de genes
é também chamada de cromossomo. Os genes são geralmente codificados
como sequencias binárias, apesar de poderem ser representados por
números reais. O tamanho da sequência binaria determina o quão preciso
é o valor, também conhecido como alelo, do gene é representado.
O algoritmo genético aplicado a otimização de problemas funciona
da forma descrita a seguir. O processo se inicia com uma população inicial
randômica. Cada gene é gerado de forma randômica, gerando 0`s e 1`s. As
sequencias de cromossomos são então formadas, combinando os genes.
Estas sequencias de cromossomos definem a solução. A função objetivo é
avaliada para cada solução da população. Cada solução recebe um valor
de adequação, que corresponde ao valor da função objetivo para aquela
solução. Em um caso de minimização, um valor de adequação alto é
designado para as soluções com menor valor da função objetivo.
Em seguida, os membros da população são selecionados para se
reproduzirem, baseado em seus valores de adequação. O operador de

8
seleção é aplicado para cada membro da população. O operador de seleção
escolhe pares de indivíduos da população que irão produzir uma solução-
filho.
Após isto o operador de cruzamento é aplicado. O operador de
cruzamento essencialmente produz novas soluções combinando os genes
das soluções-pais. Em uma situação de cruzamentos uniformes, é possível
obter qualquer combinação de dois cromossomos-pais. Cada bit em cada
gene no cromossomo é designado uma probabilidade para a ocorrência do
“crossover” (por exemplo, 50% para todos os genes). Um número
randômico entre 0 e 1 é gerado para cada bit em cada gene. Se o número
for maior que 0,5, então o bit é alocado no correspondente bit no gene do
outro pai. Se for menor que 0,5 o gene se mantem. Esse processo é repetido
por todo o cromossomo de cada pai. Quando o processo termina, duas
soluções-filho são geradas, e substituem seus pais na população.
O processo de mutação ocorre em seguida. Quando o processo de
cruzamento é terminado e uma nova população é formada, o operador de
mutação é utilizado. Cada bit de cada gene da solução é submetido a uma
chance de ser trocado de 0 a 1. A chance é conhecida como probabilidade
de mutação, que geralmente é pequena. Isto introduz aleatoriedade no
processo, que ajuda a evitar mínimos locais. Após completado o processo
de mutação é terminado um ciclo. Muitos ciclos podem ser necessários
antes da convergência do método para uma solução ótima.
A imagem abaixo mostra simplificadamente o processo de criação
de novas gerações.

9
Figura 3 - Funcionamento da criação de novas gerações
Enxame de Partículas
Este método é baseado no comportamento social de várias espécies
e tenta equilibrar a individualidade e sociabilidade dos indivíduos com o
intuito de localizar o ótimo de interesse. A ideia original veio da
observação de pássaros a procura de um local para seu ninho. Quando a
individualidade cresce, a procura por locais alternativos para o ninho
também cresce. Porém, se a individualidade for muito alta, o indivíduo
pode nunca encontrar o melhor lugar. Em outras palavras, quando a
sociabilidade cresce, os indivíduos aprendem mais com a experiência de
seus vizinhos. Mas, se a sociabilidade for muito alta, todos os indivíduos
podem convergir para o primeiro local que encontrarem (possivelmente
um mínimo local).
A metodologia, portanto, também é baseada na manipulação de
uma população de soluções que é inicializada de forma aleatória. O
processo de otimização consiste na busca da posição com maior aptidão,
sendo que o espaço de busca corresponde ao conjunto de possíveis
posições de todas as partículas. O deslocamento de cada uma delas é
afetado pela sua própria trajetória, bem como pelo das partículas que
apresentam melhor desempenho. A metodologia tende a preservar as

10
posições com melhor aptidão e descartar as outras. Para tanto, o
movimento de cada partícula é afetado tanto pela informação sobre sua
melhor posição quanto pelo registro da melhor posição obtida
considerando todas as outras partículas.
O fluxograma abaixo demonstra o funcionamento do método de
enxame de partículas:
Figura 4 - Fluxograma de funcionamento do método de enxame de partículas
Arrefecimento Simulado
O método do arrefecimento simulado é baseado na termodinâmica
do resfriamento de um material de uma fase liquida para uma fase sólida.
Se o material liquido for resfriado devagar e deixado tempo suficiente em
uma temperatura próxima a temperatura de mudança de fase, um cristal
perfeito será criado, que possui o menor estado de energia interna.
Por outro lado, se o material não for deixado tempo o suficiente em
uma temperatura próxima a de mudança de fase, ou se o processo de
resfriamento não for suficientemente devagar, o cristal final terá muitos

11
defeitos e um estado de grande energia interna. Esse fenômeno é similar
ao processo de têmpera usado em aplicações metalúrgicas.
Os métodos baseados em gradientes se movem em direções que
sucessivamente diminuem o valor da função objetivo enquanto minimizam
o valor de uma certa função, ou em direções que sucessivamente
aumentam o valor da função objetivo no processo de encontrar o máximo
valor de certa função. O método do arrefecimento simulado pode se mover
em qualquer direção em qualquer ponto do processo de otimização,
escapando de possíveis mínimos ou máximos locais.
Pode-se dizer que os métodos baseados em gradientes “esfriam
muito rápido”, indo diretamente ao local do ótimo, que na maioria dos
casos não é o global, mas um ótimo local.
O problema de alinhamento de eixos, como dito anteriormente, é de natureza
estocástica, com um infinito número de deslocamentos dos mancais possíveis. Encontrar
uma solução que satisfaça um número de maior de critérios é uma tarefa difícil e o
algoritmo genético é a ferramenta apropriada para lidar exatamente com este tipo de
problema. O algoritmo genético tem a habilidade de conduzir buscas paralelas no espaço
de solução (sendo esta a sua maior vantagem em relação a outros métodos), e
simultaneamente obter diversas configurações de mancais que satisfazem os
requerimentos de carregamento.
O objetivo desta otimização é fornecer um grupo de soluções aceitáveis, seguindo
as restrições e critérios adotados. Múltiplas soluções são necessárias pois geralmente é
imperativo a avaliação humana como fator decisivo na seleção do alinhamento desejado.
Fornecer múltiplas soluções é uma característica inata e simples para o algoritmo
genético.
O problema do alinhamento de eixo não necessita de convergência para um único
resultado, já que o que se procura é um grupo de soluções. Por este motivo o operador de
mutações no algoritmo genético pode se tornar uma importante ferramenta, já que se for
intencionalmente alto vai gerar uma variedade maior de soluções, o que é desejado.
Os motivos citados anteriormente então, tornam o algoritmo genético a melhor
escolha para a otimização do alinhamento de eixos.

12
3.2.1 - MOGA (Multi-Objective Genetic Algorithm)
O MOGA utilizado neste trabalho é um método que dá suporte a todos os tipos de
parâmetros de entrada.
É um dos métodos de otimização presentes no modulo de otimização de
superfícies de resposta do Ansys, baseado em controlar os conceitos de elitismo.
O fluxograma abaixo apresenta o funcionamento do método:
Figura 5 - Fluxograma de funcionamento do MOGA
Os parâmetros de entrada do MOGA são:
- Máximo Número de Ciclos – O critério de parada baseado no número de ciclos
máximo que o algoritmo pode executar.

13
- Número de Amostras Iniciais - O número de amostras geradas inicialmente de
forma randômica.
- Número de Amostras por Iteração - O número de amostras que podem ser criados
por iteração do método.
- Máximo Porcentagem de Pareto Admissível (Critério de Convergência) –
Representa a porcentagem de soluções da população total que devem atingir os
critérios e objetivos estabelecidos antes que o método pare.
- Porcentagem de Convergência de Estabilidade - A porcentagem de convergência
que as soluções da população deve ter para que o método tenha convergido e
consequentemente parado.
4 - METODOLOGIA PARA O ALINHAMENTO ÓTIMO DO EIXO
PROPULSOR
A metodologia desenvolvida para alcançar o alinhamento ótimo neste projeto,
utilizando o método dos elementos finitos segue a sequência definida abaixo:
1. Definição da Geometria do eixo como elemento sólido 3D. É essencial
que a geometria do eixo seja correspondente a geometria do eixo
analisado, pois as tensões, momentos e forças são analisadas no eixo como
um todo.
2. Definição do tamanho e geração da malha. A malha para elementos finitos
deve ser refinada o suficiente para no mínimo garantir a simetria da matriz
de influência para assegurar a precisão do método. Malhas muito
refinadas, porém, podem provocar uma grande demora nos cálculos.
3. Escolha das Condições de Contorno: Posicionamento dos mancais com
restrição de deslocamento no eixo vertical e aplicação das forças externas,
inclinações e momentos fletores ao modelo em suas respectivas posições
no eixo.

14
4. Escolha de Parâmetros para a otimização: Neste caso são utilizados como
parâmetros as reações verticais nos mancais, o deslocamento vertical dos
mancais e a tensão máxima de Von Mises.
5. Criação de Superfícies de resposta: As superfícies de resposta são
necessárias para agilizar o processo de otimização, já que interpolam
resultados entre si. Nesta etapa ocorre a definição das variações máximas
e mínimas para os parâmetros de entrada (os deslocamentos nos mancais).
6. Definição das Restrições e Objetivos de otimização: Com o intuito de
encontrar as melhores soluções para o problema, devemos definir os
objetivos e restrições relacionados a este. Neste caso o objetivo
perseguido é que todos os mancais devem perseguir uma carga média
(somatório das forças externas no eixo dividido pelo número de mancais),
minimizando também a tensão máxima de Von Mises. É importante
observar que, devido à proximidade com o hélice, o mancal do tubo
telescópico muito provavelmente não irá alcançar esta carga média,
porem o método irá buscar o caso que mais se aproxime disto. A tensão
máxima de Von Mises admitida deve ser definida nesta fase.
7. Definição do número de pontos candidatos ao ótimo a serem analisados.
É importante notar que esta análise posterior de pontos candidatos é feita
de forma menos automatizada, e por isso não é desejável uma quantidade
muito grande de pontos candidatos.
8. Análise de Resultados de Pontos Candidatos: Esta análise deve ser
pautada seguindo os objetivos do projetista com relação ao eixo, tendo em
vista dificuldades construtivas e particularidades do eixo. Foi adotado
como preferencial os resultados onde as reações de mancais adjacentes
não são maiores que 20%, como adotado na referencia [4].
9. Escolha do melhor ponto e respectiva verificação na matriz de Influência.
A verificação do melhor ponto utilizando a matriz de influência é uma
verificação para garantir que as reações no eixo para os deslocamentos

15
apontados realmente correspondem. A escolha do melhor ponto se baseia
em escolher o ponto onde as diferenças entre as reações dos mancais
adjacentes são as menores possíveis.
4.1 - Fluxograma
O fluxograma desenvolvido para esta metodologia pode ser dividido em três
partes.
A primeira parte se refere a criação do modelo do eixo, com a definição da
geometria, do tamanho da malha, a escolha das condições de contorno (posicionamento
dos mancais) e aplicação das forças.
A segunda parte se refere ao processo de otimização para encontrar os pontos
candidatos a serem analisados. Nesta segunda fase ocorre a escolha de parâmetros para
otimização, criação das superfícies de resposta, definição das restrições e objetivos de
otimização e definição do número de pontos candidatos.
A terceira parte se refere a análise dos pontos candidatos gerados no processo de
otimização, escolha do melhor, e verificação através da matriz de influência. Esta é a
parte do processo que irá requerer uma maior experiência do projetista para a definição
da análise do ponto ótimo.
Abaixo o fluxograma da metodologia desenvolvida, dividido em suas respectivas
partes:
I
Definição da Geometria do Eixo
como elemento sólido 3D
Definição de tamanho de malha e
geração da malha
Escolha das Condições de Contorno:
Posicionamento dos Mancais com
restrição de deslocamento no eixo vertical
e Aplicação das Forças, momentos
fletores e inclinações.
2

16
2
Escolha de Parâmetros para otimização:
Reações Verticais nos mancais, tensão
máxima de Von Mises, deslocamento
vertical dos mancais
Criação das Superfícies de Resposta:
Definição das Variações Máximas e
mínimas para os parâmetros de entrada
Definição das Restrições e objetivos de otimização:
Todos os mancais devem perseguir a carga média,
minimizando a tensão máxima de von mises. Tensão
Máxima de Von Mises admitida é definida
Definição do número de pontos
candidatos ao ótimo a serem analisados
3
3
Análise de Resultados de Pontos
Candidatos: Preferência a Resultados onde as
reações de mancais adjacentes não são maiores
que 20%
Escolha do melhor ponto e respectiva
verificação na matriz de Influência
F

17
4.2 - Implementação no Ansys
A implementação do método no Software Ansys se utilizou dos módulos Static
Structural, Response Surface, e Response Surface Optimization. O primeiro módulo
corresponde a toda a primeira fase do fluxograma a cima, onde o modelo é definido. O
segundo e terceiro módulo apresentado corresponde a segunda fase do fluxograma acima.
A terceira fase foi desenvolvida no Software Microsoft Excel.
A figura abaixo mostra a organização dos módulos no Ansys:
Figura 6 - Implementação da metodologia no Ansys

18
4.3 - Verificação do Método
A verificação do método foi feita utilizando o método da matriz de influência
como comparação para garantir a correspondência do resultado da otimização.
O modelo utilizado na verificação foi um modelo cilíndrico oco de 3 apoios, com
40 cm de diâmetro e 2 cm de espessura. O único mancal cuja posição foi submetida ao
processo de otimização foi o mancal central, sendo a única força atuante no cilindro a
forca de peso próprio, distribuída uniformemente, de 5372,1 N.
O modelo 3D desenvolvido se encontra representado na figura abaixo:
Figura 7 - Modelo sólido 3D do eixo utilizado na verificação
A reação média desejada é dada pela forca total ao qual o eixo é submetido
dividida pelo número de mancais. Neste caso a reação média desejada para cada mancal
é então de 1790,7 N.
𝑅𝑀é𝑑𝑖𝑎 = 1790,7 𝑁
Os objetivos da otimização serão então que os três mancais alcancem o valor da
reação média, tendo como parâmetro a ser variado apenas a posição vertical do mancal
central. A otimização ainda é restrita pela tensão máxima de Von Mises, que não poderá
ser maior do que 250 Mpa, que é o limite de tensão de escoamento do material.
Foi definido que a variação máxima e mínima para o deslocamento e
consequentemente para a construção das superfícies de resposta seria de -10 mm até 10
mm.
O deslocamento que resulta na solução onde as reações mais se aproximam da
reação média é o deslocamento de -0,111 mm.
𝐷ó𝑡𝑖𝑚𝑜 = −0,111 𝑚𝑚

19
Com este deslocamento as reações encontradas para o apoio no Ansys são:
𝑅𝐸𝑛𝑐𝑜𝑛𝑡𝑟𝑎𝑑𝑎 = [1786,571790,791794,78
] 𝑁
É possível perceber que os valores das reações encontradas estão próximos do
valor da reação média procurada.
A matriz de influência então é encontrada; utilizando-se do processo padrão da
variação de 1 mm para cada mancal. Retirando todas as forças que atuam no eixos
(inclusive o peso próprio) é variado 1 mm do primeiro mancal e os valores das reações
são anotados como primeira linha da matriz de influência. As demais linhas são obtidas
variando-se os demais mancais.
A matriz de influência encontrada então é:
𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [4157,8 −4166 8,2244−4166 8304 −41388,224 −4138 4129,8
]
As reações iniciais (sem deslocamento dos mancais) são:
𝑅𝑒𝑎𝑐𝑜𝑒𝑠 𝐼𝑛𝑖𝑐𝑖𝑎𝑖𝑠 = [1323,42714
1334,7] N
Utilizando a Eq 1 podemos encontrar os valores das reações para o deslocamento
ótimo. As reações calculadas pela matriz de influência foram:
𝑅𝑒𝑎𝑐𝑜𝑒𝑠 𝑝𝑒𝑙𝑎 𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [1786,571790,761794,76
] N
Pode-se observar que os valores das reações dadas pelo Ansys e pelo método da
matriz de influência são extremamente próximos.
A diferença percentual entre as reações é dada abaixo:

20
𝐷𝑖𝑓𝑒𝑟𝑒𝑛𝑐𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑒𝑎𝑐𝑜𝑒𝑠 𝑒𝑛𝑐𝑜𝑛𝑡𝑟𝑎𝑑𝑎𝑠 = [−0.000248%
0,00152%0,000956%
]
As diferenças encontradas entre as reações obtidas são insignificantemente
pequenas e próximas da reação média esperada, o que confirma a validade do método.
É importante ressaltar que, para garantir a validade de cada um dos casos de
estudo, a verificação através do método da matriz de influência foi também feita em cada
um dos casos estudados.
5 - ESTUDO DE CASO
Os casos levantados para estudo foram baseados nos contidos na tese de mestrado
Analise do Alinhamento de Eixos Propulsores [3].
Os casos estudados foram submetidos a metodologia desenvolvida para encontrar
o deslocamento ótimo dos mancais e seus resultados comparados com os resultados
apresentados na tese de mestrado referida.
É importante ressaltar que todos os casos estudados consideraram o eixo “frio”,
ou seja, em sua condição estática.
Os casos estudados foram: “Navio Tanque a Turbina”, “Casco B72” e Corveta
Classe “Imperial Marinheiro.
5.1 - Navio Tanque a Turbina
Este exemplo apresenta um eixo que possui quatro mancais, uma engrenagem
redutora e um hélice.
A engrenagem redutora atua como uma força para baixo (seu próprio peso), e o
hélice atua tanto com uma forca para baixo quanto com um momento no sentido anti-
horário. O eixo também está submetido ao seu peso próprio.
O mancal do tubo telescópico não pode ser deslocado, portanto, apenas três
mancais que serão deslocados.
A condição inicial da linha de eixo apresenta os mancais alinhados.

21
5.1.1 - Modelagem
O eixo foi modelado como sólido em 3D, no software Ansys, seguindo a geometria
apresentada abaixo:
Figura 8 – Modelo do Navio Tanque a Turbina
O seu modelo em três dimensões está apresentado abaixo:
Figura 9 - Modelo sólido e 3D do Navio Tanque a Turbina
22
Os mancais deslocados foram os mancais 2,3 e 4 (representado pelos
displacements 2,3 e 4 na imagem) dado que o mancal 1 representa o mancal do tubo
telescópico, que não pode ser movido por ser estrutural.
Os parâmetros utilizados para a otimização são então os deslocamentos dos três
mancais como dados de Input e as reações nos quatro mancais juntamente com a tensão
máxima de Von Mises como Outputs.
O deslocamento máximo possível aos mancais foi considerado como 10 mm para
cima ou para baixo.
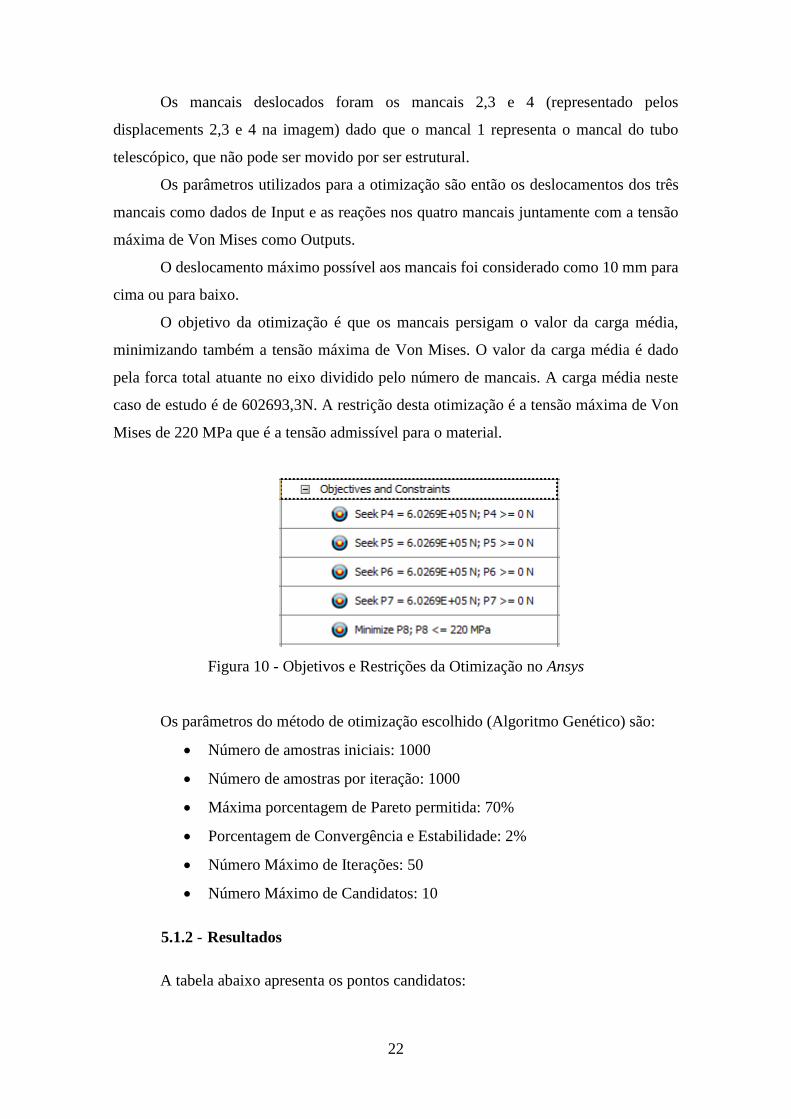
O objetivo da otimização é que os mancais persigam o valor da carga média,
minimizando também a tensão máxima de Von Mises. O valor da carga média é dado
pela forca total atuante no eixo dividido pelo número de mancais. A carga média neste
caso de estudo é de 602693,3N. A restrição desta otimização é a tensão máxima de Von
Mises de 220 MPa que é a tensão admissível para o material.
Figura 10 - Objetivos e Restrições da Otimização no Ansys
Os parâmetros do método de otimização escolhido (Algoritmo Genético) são:
Número de amostras iniciais: 1000
Número de amostras por iteração: 1000
Máxima porcentagem de Pareto permitida: 70%
Porcentagem de Convergência e Estabilidade: 2%
Número Máximo de Iterações: 50
Número Máximo de Candidatos: 10
5.1.2 - Resultados
A tabela abaixo apresenta os pontos candidatos:

23
Tabela 1 - Pontos Candidatos ao ótimo do Navio Tanque a Turbina
O ponto marcado em vermelho foi o ponto escolhido como melhor ponto
candidato, enquanto o ponto marcado em azul é o ponto escolhido na tese de mestrado
Analise do Alinhamento de Eixos Propulsores [3].
As colunas d2, d3 e d4 representam o deslocamento dos mancais 2, 3 e 4 em mm,
enquanto as colunas r1, r2, r3 e r4 representam as reações nos mancais 1,2,3 e 4. A coluna
Stress nos dá a tensão máxima de Von Mises. O paper citado na última linha da tabela se
refere a referência [3].
O ponto ótimo escolhido foi escolhido se utilizando do critério de diferenças entre
reações menores que 20% nos mancais adjacentes. Como o mancal 1 não é deslocável e
se encontra muito próximo da carga do hélice a sua diferença para o mancal 2 não pode
atender a este critério sem comprometer as diferenças entre os mancais 2 e 3 e entre os
mancais 3 e 4. A tabela com as diferenças de reações entre os mancais pode ser encontrada
abaixo:

24
Tabela 2 - Diferença entre carregamento de mancais adjacentes do Navio Tanque a
Turbina
Podemos observar que o ponto candidato escolhido é o único que apresenta as
diferenças entre os mancais 2 e 3 e os mancais 3 e 4 menores que 20%, portanto este foi
o ponto escolhido.
Ao comparar o ponto escolhido com o ponto da Tese analisada é possível notar
que o ponto escolhido neste trabalho apresenta diferenças de reações entre os mancais
menores, o que segundo os critérios escolhidos neste trabalho torna o ponto 3 uma melhor
opção.
Os deslocamentos ótimos são então:
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 2 = 0,787 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 3 = 3,261 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 4 = 3,269 𝑚𝑚
A matriz de influência encontrada para a verificação deste resultado foi a seguinte:
𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [
269220 −269220 −0,717−269220 326820 −58100
−0.86 −58100 20064000
−0,015505,52
−2 × 107
−0,016 504,85 −2 × 107 20007000
]
Utilizando a matriz de influência para a verificação das reações encontramos:

25
𝑅𝑒𝑎𝑐𝑜𝑒𝑠 𝑝𝑒𝑙𝑎 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [
666,045351,17408,87386,58
] 𝑘𝑁
A diferenças entre as reações encontradas pela matriz de Influência e pelo método
proposto estão presentes na tabela abaixo:
𝐷𝑖𝑓𝑒𝑟𝑒𝑛𝑐𝑎𝑠 𝑒𝑛𝑡𝑟𝑒 𝑎𝑠 𝑟𝑒𝑎𝑐𝑜𝑒𝑠 𝑒𝑛𝑐𝑜𝑛𝑡𝑟𝑎𝑑𝑎𝑠 = [
0,000730,00212
−0,078271,272
] %
A diferenças encontradas são insignificantes, o que valida o resultado encontrado.
A deformação do eixo pode ser vista na imagem abaixo:
Figura 11 - Deformação total no eixo
5.2 - Casco B72
A linha de eixo deste exemplo possui um gerador de eixo diretamente acoplado,
assim como um hélice, um mancal escora e um volante que exercem forças para baixo
(peso próprio).
A condição inicial da linha de eixo apresenta os mancais alinhados.

26
5.2.1 - Modelagem
O eixo foi modelado como sólido em 3D, no software Ansys, seguindo a geometria
apresentada abaixo:
Figura 12 - Modelo do Casco B72

27
O seu modelo em três dimensões está apresentado abaixo:
Figura 13 - Modelo Sólido 3D do Casco B72
Os mancais deslocados foram os mancais 1,2,3,4 e 5 (representado pelos
displacements 1,2,3 e 4 na imagem) dado que o displacement 4 representa o mancal 4 e
5, que por serem parte do motor, precisam ser movidos juntamente.
Os parâmetros utilizados para a otimização são então os deslocamentos dos cinco
mancais como dados de Input e as reações nos cinco mancais juntamente com a tensão
máxima de Von Mises como Outputs.
O deslocamento máximo possível dos mancais foi considerado como 10 mm para
cima ou para baixo.
O objetivo da otimização é que os mancais persigam o valor da carga média,
minimizando também a tensão máxima de Von Mises. O valor da carga média é dado
pela forca total atuante no eixo dividido pelo número de mancais. A carga média neste
caso de estudo é de 118584,6 N.
É necessário notar que o mancal 4 e 5 são representados no modelo como um
único mancal (já que só podem ser deslocados juntos) e por isso a carga perseguida para
o conjunto será duas vezes a carga média, ou seja, 237169,2 N.
A restrição desta otimização é a tensão máxima de Von Mises de 220 MPa que é
a tensão admissível para o material.

28
Figura 14 - Objetivos e Restrições da otimização do Casco B72 no Ansys
Os parâmetros do método de otimização escolhido (Algoritmo Genético) são:
Número de amostras iniciais: 1000
Número de amostras por iteração: 1000
Máxima porcentagem de Pareto permitida: 70%
Porcentagem de Convergência e Estabilidade: 2%
Número Máximo de Iterações: 50
Número Máximo de Candidatos: 10
5.2.2 - Resultados
A tabela abaixo apresenta os pontos candidatos:
Tabela 3 - Pontos candidatos ao ótimo do Casco B72

29
O ponto marcado em vermelho foi o ponto escolhido como melhor ponto
candidato, enquanto o ponto marcado em azul é o ponto escolhido na tese de mestrado
Analise do Alinhamento de Eixos Propulsores [3].
As colunas d1, d2, d3 e d4 representam o deslocamento dos mancais 1, 2, 3 e 4
em mm, enquanto as colunas r1, r2, r3 e r4 representam as reações nos mancais 1,2,3 e 4.
A coluna Stress nos dá a tensão máxima de Von Mises. Lembrando que d4 e r4 se referem
ao mancal 4 e 5 do modelo original. O paper citado na última linha da tabela se refere a
referência [3].
O ponto ótimo escolhido foi escolhido se utilizando do critério de diferenças entre
reações menores que 20% nos mancais adjacentes. A reação 4, por representar dois
mancais, não atendeu a este critério e para sua análise foi necessário calcular sua diferença
para o mancal 3 dividindo sua carga por dois (já que o mancal 4 no modelo 3D representa
o mancal 4 e 5). A tabela com as diferenças de reações entre os mancais pode ser
encontrada abaixo:
Tabela 4 - Diferença de Carregamento nos mancais adjacentes do Casco B72
Podemos observar que o ponto candidato escolhido é o único que apresenta as
menores diferenças entre as reações dos mancais, sendo todas menores do que o critério
de 20%.
É possível identificar também que o ponto 2 apresenta valores muito baixos de
diferenças de reações, porem a diferença entre a reação entre o mancal 1 e o mancal 2 não
é menor que 20%, o que não atende aos critérios estabelecidos. Apesar disto o ponto 2

30
pode ainda assim ser escolhido como um ponto ótimo caso exista uma leve flexibilização
dos critérios estabelecidos.
Ao comparar o ponto escolhido com o ponto da Tese analisada é possível notar
que o ponto escolhido neste trabalho apresenta diferenças de reações entre os mancais
menores, o que segundo os critérios escolhidos neste trabalho torna o ponto 9 uma melhor
opção.
Os deslocamentos ótimos são então:
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 1 = −0,956 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 2 = −0,574 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 3 = −0,37 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 4 = −0,386 𝑚𝑚
A matriz de influência encontrada para a verificação deste resultado foi a seguinte:
𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [
206360 −200410 −3967,9−200410 276640 −71047−3967,9 −71047 154380
24,268
−5900,3−80157
24,268 −59003 −80157 85495
]
Utilizando a matriz de influência para a verificação das reações encontramos:
𝑅𝑒𝑎𝑐𝑜𝑒𝑠 𝑝𝑒𝑙𝑎 𝑚𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝐼𝑛𝑓𝑙𝑢𝑒𝑛𝑐𝑖𝑎 = [
129,32135,27108,84218,47
] 𝑘𝑁
A diferenças entre as reações encontradas pela matriz de Influência e pelo método
proposto estão presentes na tabela abaixo:
𝐷𝑖𝑓𝑒𝑟𝑒𝑛𝑐𝑎𝑠 𝑒𝑛𝑡𝑟𝑒 𝑎𝑠 𝑟𝑒𝑎𝑐𝑜𝑒𝑠 𝑒𝑛𝑐𝑜𝑛𝑡𝑟𝑎𝑑𝑎𝑠 = [
1,30,65
−1,050,69
] %
A diferenças encontradas são insignificantes, o que valida o resultado encontrado.
Os valores dos momentos fletores no eixo podem ser visualizados na imagem
abaixo:

31
Figura 15 - Momentos Fletores no Casco B72
A deformação do eixo pode ser vista na imagem abaixo:
Figura 16 - Deformação Total do casco B72
5.3 - Corveta Classe “Imperial Marinheiro”
O eixo da Corveta Classe “Imperial Marinheiro” é muito longo, possuindo 8
mancais. O mancal escora, o hélice e o volante exercem carga sobre o eixo. O mancal 8
representa um pé de galinha, o mancal 7 o tubo telescópico de ré e o mancal 5 o tubo
telescópico de vante. Os mancais 4 e 5 representam os mancais intermediários e os
mancais 1,2 e 3 os mancais do motor.
A condição inicial da linha de eixo apresenta os mancais alinhados.
5.3.1 - Modelagem
O eixo foi modelado como sólido em 3D, no software Ansys, seguindo a geometria
apresentada abaixo:

32
Figura 17 – Modelo da Corveta Classe “Imperial Marinheiro”
O seu modelo em três dimensões está apresentado abaixo:
Os mancais 1,2 e 3 estão muito próximos, e possuem alta rigidez. O leve
deslocamento de um destes mancais influenciaria fortemente a reação nos outros dois
mancais, sendo talvez necessário um valor de deslocamento muito mais baixo do que
seria possível de ser feito na vida real. Por este motivo os mancais 1,2 e 3 não serão
Figura 18 - Modelo sólido 3D da Corveta Classe "Imperial Marinheiro"

33
deslocados. Os mancais 6,7 e 8 são estruturais e por este motivo não podem ser
deslocados. Resta então os mancais intermediários 4 e 5, que serão os mancais que serão
submetidos a otimização de seu posicionamento.
Os parâmetros utilizados para a otimização são então os deslocamentos dos dois
mancais como dados de Input e as reações nos oito mancais juntamente com a tensão
máxima de Von Mises como Outputs.
O deslocamento máximo possível dos mancais foi considerado como 10 mm para
cima ou para baixo.
O objetivo da otimização é que os mancais ajustados persigam o valor da carga
média, minimizando também a tensão máxima de Von Mises. O valor da carga média é
dado pela forca total atuante no eixo dividido pelo número de mancais. A carga média
neste caso de estudo é de 6736,0775 N.
Devido a possibilidade de apenas mover dois dos oito mancais, atingir a reação
média em todos pode ser impraticável, já que esta restrição resulta em pouco controle do
sistema. Como garantia de que todos os mancais ao menos contribuíssem com o melhor
alinhamento, foi definido a restrição para a otimização de que todas as cargas nos mancais
devem ser maiores que zero, excluindo as possibilidades de que algum dos mancais fique
descarregado.
Outra restrição desta otimização é a tensão máxima de Von Mises de 220 MPa que é
a tensão admissível para o material.
Figura 19 - Restrições e Objetivos da otimização da Corveta classe "Imperial
Marinheiro" no Ansys

34
Os parâmetros do método de otimização escolhido (Algoritmo Genético) são:
Número de amostras iniciais: 1000
Número de amostras por iteração: 1000
Máxima porcentagem de Pareto permitida: 70%
Porcentagem de Convergência e Estabilidade: 2%
Número Máximo de Iterações: 50
Número Máximo de Candidatos: 10
5.3.2 - Resultados
A tabela abaixo apresenta os pontos candidatos:
O ponto marcado em vermelho foi o ponto escolhido como melhor ponto
candidato, enquanto o ponto marcado em azul é o ponto escolhido na tese de mestrado
Analise do Alinhamento de Eixos Propulsores [3].
As colunas d4 e d5 representam o deslocamento dos mancais 4 e 5 em mm,
enquanto as colunas r1, r2, r3, r4, r5, r6, r7 e r8 representam as reações nos mancais 1,2,3,
4, 5, 6, 7 e 8. A coluna Stress nos dá a tensão máxima de Von Mises. O paper citado na
última linha da tabela se refere a referência [3].
O ponto ótimo escolhido foi escolhido se utilizando do critério de diferenças entre
reações nos mancais adjacentes. Como para este eixo foi possível deslocar apenas dois
mancais, o controle sobre as reações no sistema foi baixo, o que tornou impraticável
encontrar uma solução onde as diferenças entre as reações dos mancais adjacentes todos
fossem menores que 20%.
Tabela 5 -Pontos candidatos ao ótimo da Corveta Classe “Imperial Marinheiro”

35
Podemos observar que o candidato escolhido apresenta a diferença entre as
reações dos mancais 4 e 5 e dos mancais 5 e 6 menores do que os 20% estipulados. O
ponto candidato 3 foi considerado o ponto ótimo pois além das diferenças de reações já
citadas é também o ponto que tem a menor diferença entre o mancal 1 e o mancal 2. A
diferença entre o mancal 1 e o mancal 2 se mostrou a maior em todos os pontos candidatos
e por isso a redução desta é muito bem vista.
Ao comparar o ponto escolhido com o ponto da Tese analisada é possível notar
que o ponto escolhido neste trabalho apresenta uma melhor distribuição de carga no eixo,
o que segundo torna o ponto 3 uma melhor opção.
Os deslocamentos ótimos são então:
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 4 = 0,0642 𝑚𝑚
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜 𝑑𝑜 𝑚𝑎𝑛𝑐𝑎𝑙 5 = −0,0419 𝑚𝑚
Os valores dos momentos fletores no eixo podem ser visualizados na imagem
abaixo:
A deformação do eixo pode ser vista na imagem abaixo:
Tabela 6 - Diferença de Carregamento nos mancais adjacentes da Corveta Classe
“Imperial Marinheiro”

36
6 - CONCLUSÕES E RECOMENDACOES
O presente projeto nos permite verificar a validade da metodologia proposta,
demonstrando a viabilidade e as vantagens para que se encontre um grupo de soluções
adequada para o alinhamento de qualquer eixo.
Apesar do processo proposto apresentar um grau de automatização na escolha do
alinhamento ótimo, ainda assim a experiência e sensibilidade de um projetista é
requisitada para validar a escolha dentro do grupo de soluções.
O tipo de algoritmo genético utilizado (MOGA) se mostrou eficiente, porem
possivelmente seria de melhor proveito que as soluções (pontos candidatos) muito
parecidas fossem excluídas, para que não fossem tratadas como soluções duplicadas, já
que não nos interessa uma convergência de soluções.
Uma taxa de mutações mais elevada que o normal, na resolução deste tipo de
problema, poderia ser mais vantajosa na obtenção de um grupo de soluções mais
heterogêneo, onde existiriam possibilidades mais distintas de escolha ao final pelo
projetista.
O projeto pode ainda futuramente ser desenvolvido para considerar o alinhamento
ótimo para o eixo em diferentes condições de calado, considerar as deformações térmicas
e dinâmicas no eixo, e as restrições especificas para cada mancal.
Figura 20 - Deformação total no eixo da Corveta classe "Imperial Marinheiro"

37
7 - REFERÊNCIAS BIBLIOGRÁFICAS
[1] NIPPON KAIJI KYOKAI (2006), “Guidelines on Shafting Alignment”.
[2] ŠVERKO, D. (2003), “Shaft Alignment Optimization with Genetics Algorithms”,
American Bureau of Shipping.
[3] BATISTA, L. A. R. (1993), “Análise do Alinhamento de Eixos Propulsores” - Rio
de Janeiro: Universidade Federal do Rio de Janeiro.
[4] VULIC, N., ŠESTAN, A., CVITANIC, V. (2006)), “Shafting Alignment Calculation
and Validation Criteria” -5th International Congress of Croatian Society of
Mechanics.
[5] COLACO, M. J., DULIKRAVICH, G. S. (2010), “A Survey of Basic
Deterministic, Heuristic, and Hybrid Methods for Single-Objective Optimization
and Response Surface Generation”, Thermal Measurements and Inverse
Techniques.














![[Apostila] Otimizacao de Processos - Ufba](https://img.document.onl/doc/110x75/55cf8f37550346703b9a18a6/apostila-otimizacao-de-processos-ufba-567855be4867f.jpg)













