O relatório relata sobre o método de relay, desenvolvido por Astrom e Hagglund. Será mostrada simulações para o controle da planta através deste método. É importante ressaltar também que foi utilizado o controlador do tipo PID.
MODELAGEM DE BAIXA ORDEM DE FEEDBACK RELIsrael Jnio V. da Silva,
Adson N. AlvesCentro Federal de Educao Tecnolgica, Campus
[email protected] [email protected] Minas
Gerais/MG, Brasil, 36700-000
Resumo: O relatrio relata sobre o mtodo de relay, desenvolvido
por Astrom e Hagglund. Ser mostrada simulaes para o controle da
planta atravs deste mtodo. importante ressaltar tambm que foi
utilizado o controlador do tipo PID.
Palavras Chave: Mtodo relay, controlador PID.
I. INTRODUO interessante assinalar que mais da metade dos
controladores industriais em uso nos dias atuais utiliza estratgias
de controle PID ou PID modificadas. A maioria dos controles
analgicos hidrulica, pneumtica, eltrica e eletrnica, ou resulta de
uma combinao destes tipos.Correntemente, muitos deles so
transformados em digitais por intermdio dos
microprocessadores.Tendo em vista que a maioria dos controladores
ajustada no local de uso, tm sido propostos na literatura muitos
tipos diferentes de regras de sintonia. A utilizao destas regras de
sintonia tem tornado possvel o ajuste suave e preciso dos
controladores PID no local de uso. Alm disso, tm sido desenvolvidos
mtodos visando a sintonia automtica e alguns controladores PID
podem ser dotados de capacidade de sintonia automtica, em operao
(on-line). Muitos mtodos prticos de comutao suave (da operao manual
para a operao automtica) e de programao de ganho esto disponveis
comercialmente(FRANCISCO A.TOLUFO,2003).
II. MTODO DE SINTONIA PARA CONTROLADORES PIDFoi utilizado o
processo de trs polos iguas e zero no semi plano direito para ser
testado nos mtodos de Relay e mtodo de Chien, Hrones e Reswick.
Como nos mostra a Equao 1. (1)
II.1 MTODO DO RELAYAuto-ajuste do rel de controladores PID tem
sido bem sucedida aplicao em controle de processos industriais e
levou para um nmero de auto - tuning comerciais (e Astrom Hagglund,
1988).A experincia de design de Ziegler-Nichols uma contribuio de
sucesso, principalmente na fase de identificao, na forma como
determina as caractersticas fundamentais do processo, ganho limite
e frequncia limite. Trata-se de uma abordagem simples e de confiana
para a identificao das suas caractersticas fundamentais. Astrom e
Hagglund sugeriram, a utilizao do mtodo relay para gerar uma
oscilao sustentada como uma alternativa ao mtodo por tentativa
convencional. Este bastante eficiente na determinao do ganho crtico
e frequncia crtica (NEVES,M.S,2009).Segundo Neves [1], as vantagens
do uso do mtodo relay so as seguintes: Requer pouco processamento
matemtico; Identifica as caractersticas do modelo em torno da sua
importante, frequncia crtica (frequncia onde a margem de fase );
Adequa-se a diferentes processos industriais; Aplicao no requer
conhecimento do modelo matemtico do sistema; Calibrao em produo, o
processo no foge ao sem ponto nominal, pois a perturbao a impor
limitada pelos seus parmetros; Baixa sensibilidade a perturbaes,
por ser implementado em malha fechada; Para processos com uma
constante de tempo muito elevada, mais eficiente em termos de tempo
do que os mtodos convencionais de step ou pulse; Evita o
fastidioso, procedimento de tentativa e erro na determinao do ganho
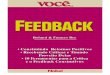
crtico.As equaes abaixo nos mostraram como se obtm os parmetros
para o mtodo de relay.A figura 1.1 nos mostra como extrair os
parmetros , , e . (2)Com o K conhecido, o tempo morto normalizado
do processo = L/T, ento: (3)
(4)
Figura 1 Oscilatrio de onda sob um feedback rel tendenciosa
II.2 METODO DE CHIEN, HRONES e RESWICKExistem muitas modificaes
efetuadas sobre o mtodo de Ziegler e Nichols,conforme descrito
anteriormente. Chien, Hrones e Reswick (CHIEN; HRONES;
RESWICK,1952) modificaram o mtodo da curva de reao de Ziegler e
Nichols para que a malha fornea uma resposta ao degrau com o menor
tempo de subida. Para isto, sugeriram utilizar um mtodo de resposta
rpida, sem sobreelevao ou com 20% de sobreelevao, onde os parmetros
so determinados a partir da resposta ao
degrau.(CARMO;MARLON,2006).
A tabela 1 abaixo, nos mostra como so calculados os parmetros de
cada controlador para o mtodo
Tabela 1: Clculo dos parmetros para o mtodo de Chien,Hrones e
ReswickControladorParmetros
PIDKp = 0.6
Ti =
Td =0.5L
III. METODOLOGIAEsse mtodo de controle foi desenvolvido atravs
de simulao no programa Simulink. A modelagem esta esboada na figura
2.
Figura 2 Modelagem com Relay
Com isso deve-se jogar valores arbitrrio de relay que atendam a
veracidade das curvas de sinal de forma que a aplicao do mtodo seja
possvel. Com isso os dados atribudos foram:
Tabela2 : Descrio dos valores atribudos ao relayDescrio
Valores
Switch on point0,3
Switch off point-0,3
Output when on0,2+5
Output when off0,2-5
Sample time-1
No primeiro passo da nossa simulao obtm-se o sinal de sada do
relay juntamente com o sinal de sada da funo de transferncia depois
da realimentao e claro, aps passar nossa oscilao sustentada. Os
sinais respectivos esto demonstrados nas figuras 3 e 4.
Figura 3 Sinal do relay
Figura 4 Sinal do sistema
Sendo utilizado o processo de trs polos iguais e zero no
semi-plano direito. Temos a equao 1 como sendo a padro do
processo.
(1)
Consideremos ento igual a 1.Chegamos na funo de transferncia
utilizada, equao 6.
(6)
O segundo passo do nosso sistema representa a o sinal compensado
que est representado na figura 5.
Figura 5 - Sinal do sistema compensado
Na terceira parte do sistema aps aplicado o mtodo de relay,
utiliza-se os valores encontrados para , L e T como variveis do
controlador PID. Com isso entramos o sinal de sada compensado,
figura 6.
Figura 6 Sinal sistema com PIDOs parmetros extrados do mtodo
esto esboados na tabela 3.
Tabela 3: Parmetros do controladorControladorParmetros
PIDKp = 1.4280
Ki= 0.8096
Kd= 10.581
Utilizando um ganho de 2000, ou seja, k =2000 o sinal de sada
representado pela figura 6. J no caso de k=1 o sistema no
controlado.
IV. REFERNCIAS
[1]NEVES,M.S. Auto-tuning de Controladores PID pelo mtodo
Relay.Dissertao de Mestrado EEC Escola Tcnica de Lisboa,2009Astrom,
K. J.; Hagglund, T. Automatic Tuning of PID Controllers;Instrument
Society of America: Research Triangle Park, NC, 1988.
CARMO,.M.J. Ambiental educacional multifuncional integrado para
sintonia e avaliao do desempenho de malhas industriais de controle.
Dissertao de mestrado PPEE UFJF,2006).
APNDICE A Cdigo utilizado no programa MatLab.
%CENTRO FEDERAL DE EDUCAO TECNOLGICA DE MINAS GERAIS CAMPUS
III%Engenharia de controle e Automao format longclc
kp=0;ki=0;kd=0;L=0;tau=0;simout=sim('processo1');y=processo1.signals(1,1).values';tempo=processo1.time';l=length(y);
t1=4.07 ;t2=3.75 ;E=0.3 ;p1=4.15 ;p2=2.95 ;k=2000 ;u1=0.2 ;u2=5 ;
L=log(((u1+u2)*k-E)/((u1+u2)*k-p1));tau = t1*(log(
(2*u2*k*2.718^L+u1*k-u2*k+E)/(u1*k+u2*k-E) ))^-1
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Metodo de Chien,Hrones e Reswick %controlador PID kp =
0.6*(tau/(k*L));ki = kp / tau;kd = kp* 0.5*L;
simout=sim('processo1');tempo=processo1.time';ycontrolado12=processo1.signals(1,2).values';plot(tempo,ycontrolado12,'--b')hold
onlegend('processo controlado PID' );


















![Teste Feedback[1]](https://img.document.onl/doc/110x75/5571fb76497959916994f1d1/teste-feedback1.jpg)