Embed Size (px)
Citation preview

Universidade Federal Rural do Rio de Janeiro
Instituto de Tecnologia
Departamento de Engenharia
TIAGO LIMA RODRIGUES
DESENVOLVIMENTO DA FERRAMENTA DE
ORTORRETIFICAÇÃO ATRAVÉS DO MODELO DE
FUNÇÕES RACIONAIS PARA O SOFTWARE SPRING
Seropédica
2010

Universidade Federal Rural do Rio de Janeiro
Instituto de Tecnologia
Departamento de Engenharia
TIAGO LIMA RODRIGUES
DESENVOLVIMENTO DA FERRAMENTA DE ORTORRETIFICAÇÃO ATRAVÉS DO MODELO DE
FUNÇÕES RACIONAIS PARA O SOFTWARE SPRING
Projeto apresentado ao curso de
Engenharia de Agrimensura da
Universidade Federal Rural do Rio de
Janeiro, como parte dos requisitos
exigidos para a obtenção do título de
Engenheiro Agrimensor.
Orientador: Mauro Antonio Homem Antunes
Seropédica
2010

DESENVOLVIMENTO DA FERRAMENTA DE
ORTORRETIFICAÇÃO ATRAVÉS DO MODELO DE
FUNÇÕES RACIONAIS PARA O SOFTWARE SPRING
POR
TIAGO LIMA RODRIGUES
Projeto de Engenharia defendido e aprovado em 20/01/2010.
Banca Examinadora:
______________________________________________________________________
Prof. PhD. MAURO ANTONIO HOMEM ANTUNES (Orientador)
Departamento de Engenharia – Universidade Federal Rural do Rio de Janeiro
______________________________________________________________________
Profa. Msc. PAULA DEBIASI
Departamento de Engenharia – Universidade Federal Rural do Rio de Janeiro
______________________________________________________________________
Profa. Dra. JULIANA MOULIN FOSSE
Departamento de Engenharia – Universidade Federal Rural do Rio de Janeiro

DEDICATÓRIA
Ao meu Deus, razão da minha vida
À José Maria Carlos Rodrigues in memorian

AGRADECIMENTOS
Primeiramente ao meu Deus, autor e consumador da minha fé, autor deste
trabalho e dono de tudo que tenho e sou, responsável por mais esta conquista.
Aos meus pais José Maria e Teresinha pelo amor, exemplos, dedicação, apoio,
incentivos, orações, compreensão e paciência. Esta vitória é de vocês!
Ao professor PhD. Mauro Antonio Homem Antunes pelos ensinamentos,
conselhos, incentivos e paciência.
Ao professor Msc. João Gonçalves Bahia pelos conselhos, oportunidades e por
ser um grande colaborador na minha formação acadêmica.
À professora Juliana Moulin Fosse pelos conselhos, ensinamentos e incentivos.
Aos professores Marcelo Moffati, Marlene Uberti, Luiz Guimarães e Gilson
Candido.
À K2FS Sistemas e Projetos pela oportunidade e idéia de projeto, apoio,
incentivos e encorajamento, em especial aos colegas Carlos Levy, Carlos Augusto,
Ygor, Marcel e Andrei por terem me ajudado grandemente.
Ao Departamento de Processamento de Imagens do Instituto Nacional de
Pesquisas Espaciais DPI – INPE, aos professores Carlos Felgueiras e Júlio D’Alge.
Ao Dr. Antônio Machado pela ajuda e colaboração neste trabalho.
Ao Centro Brasileiro de Pesquisas Físicas, aos professores João dos Anjos e
Mário Vaz.
Aos amigos Rodrigo, João, Marcos Sancas, Eduardo, Bárbara, Sérgio, Vitor,
Danilo, Marília, Tainá, Ângela, Mariana e a todos da turma 2005-I.
Aos amigos da Igreja Batista Central em Seropédica pelo apoio, orações,
incentivos e palavras de força.

SUMÁRIO
Lista de Tabelas 8
Lista de Figuras 14
Lista de Siglas 16
Resumo 17
Abstract 18
1. Introdução 19
1.1. Objetivos 20
1.1.1. Objetivo Geral 20
1.1.2. Objetivos Específicos 20
1.2. Justificativa 21
2. Fundamentação Teórica 22
2.1. Imagem Digital 22
2.2. Distorções Geométricas 23
2.3. Correção Geométrica 27
2.4. Ortorretificação 30
2.5. Modelos Matemáticos para Ortorretificação 32
2.5.1. Modelos Físicos 32
2.5.2. Modelos Generalizados 34
2.5.2.1. Modelo de Funções Racionais 35
2.5.2.1.1. Solução Independente do Terreno 39
2.5.2.1.2. Solução Dependente do Terreno 40
2.5.2.1.3. Refinamento da Solução Independente do Terreno 41
2.5.2.1.3.1. Método Direto de Refinamento 42
2.5.2.1.3.2. Método Indireto de Refinamento 42
2.6. Sistema de Processamento de Informações Geográficas - SPRING 44
3. Materiais e Métodos 46
3.1. Dados de Sensoriamento Remoto 46
3.2. Dados Cartográficos 46
3.3. Softwares Aplicativos 46
3.4. Preparação dos Dados 47
3.5. Estruturação do Algoritmo 48

3.6. Biblioteca Geográfica 50
3.7. Preparação da Base de Dados 51
3.8. Implementação e Interface 52
3.9. Ortoimagem nos Softwares Comerciais 53
3.10. Avaliação Estatística 53
3.10.1. Análise de Precisão 54
3.10.2. Análise de Tendências 55
4. Resultados 57
4.1. Imagens Ikonos 57
4.1.1. Imagem Multiespectral Ikonos 00 57
4.1.2. Imagem Multiespectral Ikonos 03 60
4.1.3. Imagem Pancromática Ikonos 00 62
4.1.4. Imagem Pancromática Ikonos 03 65
4.2. Imagens Quickbird 67
4.2.1. Imagem Multiespectral Quickbird 00 67
4.2.2. Imagem Multiespectral Quickbird 03 70
4.2.3. Imagem Pancromática Quickbird 00 72
4.2.4. Imagem Pancromática Quickbird 03 75
4.3. Imagem HRC/CBERS 2B 78
5. Conclusões e Recomendações 80
6. Referências Bibliográficas 82

8
Lista de Tabelas
Tabela 1. Descrição do erro para as duas categorias, o Observador e o Observado, com
a diferentes sub-categorias..............................................................................................25
Tabela 2. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Multiespectral Ikonos 00......................................................58
Tabela 3. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelos aplicativos comerciais para a imagem Multiespectral
Ikonos 00.........................................................................................................................58
Tabela 4. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Multiespectral Ikonos
00.............................................................................................................................. .......59
Tabela 5. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Multiespectral Ikonos 00....................................59
Tabela 6. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Multiespectral Ikonos 03......................................................60
Tabela 7. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM das ortoimagens Multiespectral Ikonos 03 geradas pelos aplicativos
comerciais........................................................................................................................61
Tabela 8. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Multiespectral Ikonos
03.............................................................................................................................. .......61
Tabela 9. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Multiespectral Ikonos 03....................................62
Tabela 10. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Pancromática Ikonos 00.......................................................63
Tabela 11. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelos aplicativos comerciais para a imagem Pancromática
Ikonos 00.........................................................................................................................63
Tabela 12. Testes de precisão e tendência para os resultados estatísticos entre o

9
K2ORTHO e os aplicativos comerciais para a imagem Pancromática Ikonos
00.....................................................................................................................................64
Tabela 13. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Pancromática Ikonos
00.............................................................................................................................. .......64
Tabela 14. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Pancromática Ikonos 03.......................................................65
Tabela 15. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM das ortoimagens Pancromática Ikonos 03 geradas pelos aplicativos
comerciais........................................................................................................................66
Tabela 16. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Pancromática Ikonos
03.............................................................................................................................. .......66
Tabela 17. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Pancromática Ikonos 03.....................................67
Tabela 18. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Multiespectral Quickbird 00.................................................68
Tabela 19. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelos aplicativos comerciais para a imagem Multiespectral
Quickbird 00....................................................................................................................68
Tabela 20. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Multiespectral Quickbird
00.....................................................................................................................................69
Tabela 21. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Multiespectral Quickbird
00.....................................................................................................................................69
Tabela 22. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Multiespectral Quickbird 01.................................................70
Tabela 23. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM das ortoimagens Multiespectral Quickbird 01 geradas pelos

10
aplicativos comerciais.....................................................................................................71
Tabela 24. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Multiespectral Quickbird
01.....................................................................................................................................71
Tabela 25. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Multiespectral Quickbird 01..............................72
Tabela 26. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Pancromática Quickbird 00..................................................73
Tabela 27. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelos aplicativos comerciais para a imagem Pancromática
Quickbird 00....................................................................................................................73
Tabela 28. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Pancromática Quickbird
00.................................................................................................................................... .74
Tabela 29. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Pancromática Quickbird
00.....................................................................................................................................75
Tabela 30. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem Pancromática Quickbird 01..................................................76
Tabela 31. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM das ortoimagens Pancromática Quickbird 01 geradas pelos
aplicativos comerciais.....................................................................................................76
Tabela 32. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem Pancromática Quickbird
01.............................................................................................................................. .......77
Tabela 33. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem Pancromática Quickbird 01................................77
Tabela 34. Resultados estatísticos do deslocamento planimétrico em metros entre as
coordenadas UTM geradas pelo K2ORTHO em comparação com os aplicativos
comerciais para a imagem HRC 00.................................................................................78
Tabela 35. Resultados estatísticos do deslocamento planimétrico em metros entre as

11
coordenadas UTM geradas pelos aplicativos comerciais para a imagem HRC
00.............................................................................................................................. .......79
Tabela 36. Testes de precisão e tendência para os resultados estatísticos entre o
K2ORTHO e os aplicativos comerciais para a imagem HRC
00.............................................................................................................................. .......79
Tabela 37. Testes de precisão e tendência para os resultados estatísticos entre os
aplicativos comerciais para a imagem HRC 00..............................................................80
Tabela A1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens
Multiespectral Ikonos 00.................................................................................................91
Tabela A2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens Multiespectral Ikonos 00 geradas pelo K2ORTHO e pelos aplicativos
comerciais........................................................................................................................92
Tabela A3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 81 CPs para as ortoimagens Multiespectral Ikonos 00 geradas pelos três softwares
comerciais........................................................................................................................94
Tabela B1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens
Multiespectral Ikonos 03.................................................................................................98
Tabela B2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens geradas pelo K2ORTHO e pelos aplicativos comerciais para a imagem
Multiespectral Ikonos 03.................................................................................................99
Tabela B3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 41 CPs para as ortoimagens Multiespectral Ikonos 03 geradas pelos três softwares
comerciais......................................................................................................................100
Tabela C1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens
Pancromática Ikonos 00................................................................................................102
Tabela C2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens Pancromática Ikonos 00 geradas pelo K2ORTHO e pelos aplicativos
comerciais......................................................................................................................103
Tabela C3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 81 CPs para as ortoimagens Pancromática Ikonos 00 geradas pelos três softwares
comerciais......................................................................................................................105
Tabela D1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens
Pancromática Ikonos 03................................................................................................109

12
Tabela D2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens geradas pelo K2ORTHO e pelos aplicativos comerciais para a imagem
Pancromática Ikonos 03................................................................................................110
Tabela D3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 41 CPs para as ortoimagens Pancromática Ikonos 03 geradas pelos três softwares
comerciais......................................................................................................................111
Tabela E1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens
Multiespectral Quickbird 00..........................................................................................113
Tabela E2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens Multiespectral Quickbird 00 geradas pelo K2ORTHO e pelos aplicativos
comerciais......................................................................................................................114
Tabela E3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 81 CPs para as ortoimagens Multiespectral Quickbird 00 geradas pelos três
softwares
comerciais.......................................................................................................116
Tabela F1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens
Multiespectral Quickbird 01..........................................................................................120
Tabela F2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens geradas pelo K2ORTHO e pelos aplicativos comerciais para a imagem
Multiespectral Quickbird 01..........................................................................................121
Tabela F3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 41 CPs para as ortoimagens Multiespectral Quickbird 01 geradas pelos três
softwares
comerciais.......................................................................................................122
Tabela G1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens
Pancromática Quickbird 00...........................................................................................124
Tabela G2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens Pancromática Quickbird 00 geradas pelo K2ORTHO e pelos aplicativos
comerciais................................................................................................................... ...125
Tabela G3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 81 CPs para as ortoimagens Pancromática Quickbird 00 geradas pelos três
softwares
comerciais......................................................................................................................127

13
Tabela H1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens
Pancromática Quickbird 01...........................................................................................131
Tabela H2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens geradas pelo K2ORTHO e pelos aplicativos comerciais para a imagem
Pancromática Quickbird 01...........................................................................................132
Tabela H3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas
dos 41 CPs para as ortoimagens Pancromática Quickbird 01 geradas pelos três
softwares
comerciais......................................................................................................................133
Tabela I1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens
HRC 00..........................................................................................................................135
Tabela I2. Diferenças planimétricas em metros entre as coordenada UTM das
ortoimagens HRC 00 geradas pelo K2ORTHO e pelos aplicativos
comerciais......................................................................................................................136
Tabela I3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos
81 CPs para as ortoimagens HRC 00 geradas pelos dois softwares
comerciais......................................................................................................................138

14
Lista de Figuras
Figura 1. Representação de uma imagem. (a) imagem em níveis de cinza. (b) imagem
numérica..........................................................................................................................23
Figura 2. Erros relacionados à variação da posição, velocidade e atitude da
plataforma........................................................................................................................27
Figura 3. Transformação em uma imagem. (a) Método indireto e (b) direto.................30
Figura 4. Processo de construção da ortoimagem pela transformação indireta..............32
Figura 5. Estrutura da rotina do método 1.......................................................................40
Figura 6. Estrutura da rotina do método 2.......................................................................41
Figura 7. Estrutura da rotina do método 3.......................................................................43
Figura 8. Estrutura do algoritmo de Ortorretificação por Modelo de Funções
Racionais.........................................................................................................................50
Figura 9. Parte integrante do código fonte onde são utilizadas algumas funções da
biblioteca TerraLib..........................................................................................................51
Figura A1. Ortoimagens Multiespectral Ikonos 00 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.......................................................97
Figura B1. Ortoimagens Multiespectral Ikonos 03 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................101
Figura C1. Ortoimagens Pancromática Ikonos 00 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................108
Figura D1. Ortoimagens Pancromática Ikonos 03 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................112
Figura E1. Ortoimagens Multiespectral Quickbird 00 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................119

15
Figura F1. Ortoimagens Multiespectral Quickbird 01 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................123
Figura G1. Ortoimagens Pancromática Quickbird 00 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................130
Figura H1. Ortoimagens Pancromática Quickbird 01 a partir do K2ORTHO, PCI
Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1.....................................................134
Figura I1. Ortoimagens HRC 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3
e ERDAS IMAGINE 9.1...............................................................................................140

16
Lista de Siglas
APM – Affine Projection Model
ASTER – Advanced Spaceborne Thermal Emission and Reflection Radiometer
CBERS – China-Brazil Earth Resources Satellites
CCD – Charge Couple Device
CP – Check Point
DLT – Direct Linear Transformation (Transformação Linear Direta)
DPI – Divisão de Processamento de Imagens
EP – Erro Padrão
HR - High Resolution (Alta Resolução)
HRC – High Resolution Câmera
IFOV - instantaneous field of view (Campo de Visada Instantâneo)
INPE – Instituto Nacional de Pesquisas Espaciais
MDE – Modelo Digital de Elevação
MMQ – Método dos Mínimos Quadrados
NIMA - National Imagery and Mapping Agency
OGC – Open Geospatial Consortium
PIXEL – Picture Element
RFM – Rational Functions Model (Modelo de Funções Racionais)
RMSE – Root Mean Square Error (Raiz do Erro Médio Quadrático)
RPC – Rational Polinomials Coefficients (Coeficientes Polinomiais Racionais)
SAR – Synthetic Aperture Radar (Radar de Abertura Sintética)
SIG – Sistema de Informações Geográficas
UTM – Universal Transversa de Mercator
VIR – Visible and Infra-Red

17
RESUMO
A utilização de imagens orbitais como fonte de extração de informações
espaciais e construção de documentos cartográficos tem se tornado cada vez mais
indispensável. Imagens de alta resolução espacial associadas às metodologias
específicas de tratamento permitem uma produção de dados espaciais em escalas cada
vez maiores. Entretanto, estas imagens contêm erros sistemáticos oriundos do processo
de aquisição que precisam ser suprimidos ou minimizados. Estas distorções geométricas
são corrigidas através de correção geométrica, efetuada por uma modelagem
matemática, podendo ser 2D ou 3D, sendo esta última conhecida como ortorretificação.
Atualmente não existem softwares livres que apresentam ferramentas de tratamento
geométrico 3D para imagens orbitais. Neste sentido, o objetivo deste trabalho de
pesquisa é o desenvolvimento preliminar de um algoritmo de correção geométrica 3D
para o SPRING. Dentre os modelos físicos e não físicos, adotou-se um não físico
conhecido como Modelo de Funções Racionais, dado sua relativa acurácia em relação
ao modelo físico, disponibilidade das informações necessárias para a construção do
algoritmo e o fato de que esta metodologia seja cada vez mais usada neste tipo de
implementação. A avaliação das ortoimagens geradas ocorreu comparando-as com
ortoimagens geradas por outros aplicativos comerciais, analisando estatisticamente as
diferenças, através dos testes de t-student e de Qui-quadrado para análise de tendência e
precisão. Os resultados mostraram que houve uma tendência de deslocamento das
imagens ortorretificadas, conforme o teste t-student. Os resultados do teste Qui-
quadrado mostraram que a precisão obtida com o modelo foi melhor do que os limites
aceitáveis. As diferenças em relação às ortoimagens geradas pelos software utilizados
como referência foram da mesma ordem de grandeza das destes software entre si. Os
resultados apresentaram-se válidos para a atual fase de desenvolvimento da
implementação da rotina. Deste modo, recomenda-se a distribuição do softwares
SPRING com a nova rotina implementada para a ortorretificação de imagens de
sensoriamento remoto.

18
ABSTRACT
Satellite images as a source of spatial information and cartographic charts has
become even more important nowadays. High spatial resolution images along with
specific processing methodologies allow the production of spatial data at high scales.
However, these images contain systematic errors inherent to the acquisition process
which need to be corrected or minimized. These geometric distortions are corrected
through a geometric correction process, carried out by a mathematical modeling, which
can be 2D or 3D, being the latter called orthorectification. Until now there is no free
softwares for 3D geometric correction of satellite images. Thus the objective of this
work is to research and develop an algorithm for 3D geometric correction for the
SPRING softwares. Among the physically based and the non physically based models,
the latter was adopted using the Rational Function Model, due to its relative accuracy
compared to the physically based models, the availability of information for
implementing the algorithm and the fact that this methodology is being even more used
in such implementation. The evaluation of the output orthoimages was carried out by
comparison with the output of commercial softwares, analyzing the statistical
differences through the t-student test and chi-squared for the analysis of tendency and
precision. The results show that there was a displacement tendency in the orthorectified
images, as given by the t-test. The chi-squares tests show that the precision of the model
was better than the acceptable limits for this type of processing. The differences in
coordinates in relation to the orthoimages generated by the reference softwares were
within the same order as the differences between these softwares themselves. The results
are valid for the actual development phase of the routine implementation. Thus it is
recommended that the SPRING softwares be distributed with the new implemented
routine for the orthorectification of satellite images.

19
1. INTRODUÇÃO
A disponibilidade atual de imagens obtidas por plataformas orbitais, equipadas
com câmaras de alta e altíssima resolução espacial, tem potencializado a possibilidade
de utilização destas para a extração de informações espaciais que requerem maior
precisão, bem como para a construção de documentos cartográficos em escalas cada vez
maiores. Em setembro de 1999 a disponibilização para uso civil de imagens obtidas pela
plataforma orbital Ikonos, apresentando imagens de 1 metro de resolução espacial, abriu
um novo capítulo para a utilização do Sensoriamento Remoto como ferramenta de
extração de dados espaciais. Posteriormente, algumas plataformas foram lançadas
também disponibilizando dados de altíssima resolução espacial, como: Quickbird,
Cartosat, Eros A1 e A2, Orbview, Worldview e atualmente, a plataforma que oferece
maior resolução espacial, Geoeye com 0,41 metros. Com uma tendência cada vez maior
de disponibilidade de dados de alta resolução espacial, as metodologias de tratamento
da informação obtida têm se adequado, e, neste sentido diversas técnicas e algoritmos
surgiram nos últimos anos para viabilizar a extração das informações espaciais de forma
que haja um melhor aproveitamento possível.
As metodologias de tratamento de imagens orbitais objetivam suprimir ou
minimizar efeitos causados por diversos fatores, que se apresentam como erros
sistemáticos, de forma a produzir uma imagem final apta à extração fidedigna dos dados
espaciais. Neste contexto, um dos efeitos que mais pronuncia-se nas imagens obtidas
por sensores remotos é a distorção geométrica, que é proveniente do processo de
aquisição das mesmas. Desta forma antes da utilização das imagens faz-se necessário
um pré-processamento, denominado correção geométrica de imagens, que corrija esta
distorção. Estas correções são efetuadas através de modelagem matemática que
relaciona as coordenadas do espaço imagem com as coordenadas do espaço objeto.
Estes modelos dividem-se atualmente em modelos 2D e modelos 3D, utilizando
coordenadas planimétricas e planialtimétricas do sistema de coordenadas terrestre
respectivamente. A modelagem 3D é conhecida como ortorretificação e é a que oferece
a maior exatidão nos resultados finais, em função de propor uma modelagem de quase
todas as distorções envolvidas no processo de aquisição.
Segundo Mitishita e Saraiva (2002), diversos modelos matemáticos de
ortorretificação têm sido desenvolvidos, e neste âmbito podemos dividi-los em duas
classes, a saber: modelos rigorosos ou físicos, baseados no princípio da colinearidade, e

20
modelos aproximados, baseando-se em transformações polinomiais (Tonolo e Poli,
2003).
Estes modelos de ortorretificação de imagens orbitais estão disponibilizados em
softwares específicos de processamento digital de imagens como o PCI Geomática,
ENVI, ERDAS Imagine, ER Mapper, dentre outros pacotes específicos. Porém, todos
os aplicativos que contém esta ferramenta são comerciais e atualmente não há
disponibilidade desta em aplicativos livres.
Atualmente, o SPRING, que é um software livre, desenvolvido em parceria pelo
Instituto Nacional de Pesquisas Espaciais (INPE) e pela empresa K2FS Sistemas e
Projetos Ltda, apresenta apenas o modelo de correção geométrica de imagens 2D, o que
impede que os usuários desenvolvam projetos que demandem uma maior exatidão
geométrica. Deste modo, surge uma necessidade real da implementação desta rotina no
software.
1.1. OBJETIVOS
1.1.2. OBJETIVO GERAL
O objetivo geral deste trabalho é desenvolver uma ferramenta preliminar de
correção geométrica 3D, ortorretificação, através do modelo de Funções Racionais 3D,
para futura implementação no software SPRING.
1.1.3. OBJETIVOS ESPECÍFICOS
Este trabalho tem como objetivos específicos:
- Pesquisa dos modelos de ortorretificação atualmente disponíveis;
- Definição do modelo a ser implementado;
- Construção preliminar do modelo escolhido;
- Implementação do modelo;
- Testes e identificação de erros na implementação e;
- Avaliação da rotina de ortorretificação.
Em primeira instância foi gerado uma rotina separada denominada K2 ORTHO.
Posteriormente, efetuou-se a implementação no software SPRING.

21
1.2. JUSTIFICATIVA
Atualmente, usuários de várias áreas de conhecimento têm desenvolvido
diversos tipos de trabalhos utilizando imagens orbitais de alta resolução espacial.
Contudo as imagens comercializadas apresentam-se com diferentes níveis de
processamento, de acordo com a precisão de posicionamento, o que incide nos preços
de aquisição. De forma que, para que haja o melhor aproveitamento possível deste
insumo é necessária a utilização das imagens com o maior nível de processamento, ou
seja, os produtos ortorretificados, que são os mais dispendiosos, chegando a apresentar
preço quase três vezes superior ao das imagens com nível de processamento menor
(Cerqueira, 2004).
Uma opção é a ortorretificação das imagens efetuada pelo próprio usuário, no
qual o mesmo precisa dispor da imagem de nível de processamento inferior com os
metadados, um Modelo Digital de Elevação e um software específico de processamento
de imagens que disponha da ferramenta de ortorretificação. Porém, a maior
problemática encontra-se na inexistência de softwares livres que disponibilizem esta
ferramenta, o que leva o usuário a optar por aquirir um software comercial, ou realizar
uma correção geométrica de menor exatidão, utilizando modelos 2D. Neste sentido, ao
analisar a importância da ortorretificação, e a ausência da disponibilidade da mesma no
software SPRING, este trabalho apresenta a pesquisa e desenvolvimento da rotina para
inserção no mesmo. Isto oferecerá uma metodologia de baixo custo e alto benefício aos
usuários, uma vez que o SPRING é um software gratuito, e as imagens com nível de
processamento menor são mais econômicas.

22
2. FUNDAMENTAÇÃO TEÓRICA
2.1. IMAGEM DIGITAL
Uma imagem digital é a representação de uma imagem bidimensional utilizando
números binários devidamente codificados de modo a permitir seu armazenamento,
transferência, impressão ou reprodução, e seu processamento por meios eletrônicos.
Há dois tipos de dado digital. Um é do tipo raster e outro do tipo vetorial. Uma
imagem digital do tipo raster, ou matricial, é aquela que em algum momento apresenta
uma correspondência bit-a-bit entre os pontos da imagem raster e os pontos da imagem
reproduzida na tela de um monitor. Pode ser vista como uma matriz composta por
células geralmente quadradas, denominadas pixels (picture elemens), onde cada um
destes é representado por um nível de cinza (NC), e este é associado a um determinado
número digital. Segundo Falkner e Morgan (2002), as imagens provenientes de sensores
a bordo de plataformas orbitais são imagens em formato raster, no qual é constituído por
uma matriz de milhares de pixels.
O número de níveis de cinza no qual as células da imagem podem variar, isto é,
o intervalo de valores no qual os píxels estão mapeados é discretizado através da
resolução radiométrica, que diz respeito ao número de bits que é utilizado para a
quantização dos sinais elétricos (voltagem ou corrente elétrica) gerados pelos sensores
não-fotográficos. O intervalo de níveis de cinza é representado por [0, 2n-1], onde n é o
número de bits do sensor. Assim, como exemplo se dados de um determinado sensor
forem gravados em 8 bits, o número de níveis de cinza será 256, variando de 0 a 255. A
Figura 1 apresenta a distribuição matricial em níveis de cinza e os respecitvos números
digitais.

23
Figura 1. Representação de uma imagem. (a) imagem em níveis de cinza. (b) imagem numérica. Fonte:
Cerqueira (2004).
Com relação ao tamanho do pixel na superfície terrestre, ou seja, a medida que
um pixel equivale no espaço objeto é discretizado através da resolução espacial. Quanto
mais fina for a resolução espacial, mais detalhes poderão ser extraídos e
conseqüentemente há uma potencialidade de construção de um documento cartográfico
em uma escala maior.
Segundo Crósta (1992) e Gonzales e Woods (2000), a imagem digital de
Sensoriamento Remoto é constituída por um arranjo de elementos sob a forma de uma
malha ou grid, onde cada célula desse grid tem sua localização definida em um sistema
de coordenadas do tipo linha e coluna, representada por “x” e “y”, respectivamente, com
cada elemento possuindo um atributo “z” (nível de cinza), que representa a média da
intensidade de energia refletida ou emitida pelos diferentes materiais presentes nesse
pixel.
2.2. DISTORÇÕES GEOMÉTRICAS
As imagens obtidas por plataformas orbitais originalmente apresentam
determinados tipos de distorções sistemáticas em sua geometria durante o processo de
aquisição. Tais distorções afetam a potencialidade de utilização de tais insumos para a
extração de informações espaciais ou geração de documentos cartográficos.

24
Segundo Toutin (2004), as pesquisas de distorções geométricas de imagens,
podem ser agrupadas em duas grandes categorias: O Observador ou sistema de
aquisição (plataforma, sensor imageador e outros instrumentos de medidas, tais como
giroscópio, sensor de estrelas, etc.) e o Observado (atmosfera e Terra). Adicionalmente
a estas distorções, as deformações provenientes da projeção cartográfica devem ser
levadas em consideração, pois a maioria das aplicações de SIG encontra-se
representadas no espaço topográfico e não no geóide ou elipsóide. Neste caso, as
deformações da projeção cartográfica logicamente são incluídas nas distorções
referentes ao Observador.
Segundo Friedmann et al (1983), as distorções geométricas de imagens
subdividem-se em distorções de baixa, média e alta freqüência, onde a freqüência é
determinada ou comparada para o tempo de aquisição da imagem. Como exemplos de
baixa, média e alta freqüência de distorções podemos citar: variações orbitais, rotação
da Terra, e o efeito do relevo, respectivamente. Contudo segundo Toutin (2004), esta
subdivisão não aplica-se atualmente, pois esta teoria difere-se para cada sistema de
aquisição diferente. Por exemplo, variações de ângulos de atitude são distorções de alta
freqüência para imagens Quickbird ou pushbroom scanner aerotransportado, distorções
de média freqüência para imagens SPOT-HRV e Landsat-ETM+, e distorções de baixa
freqüência para imagens Landsat-MSS.
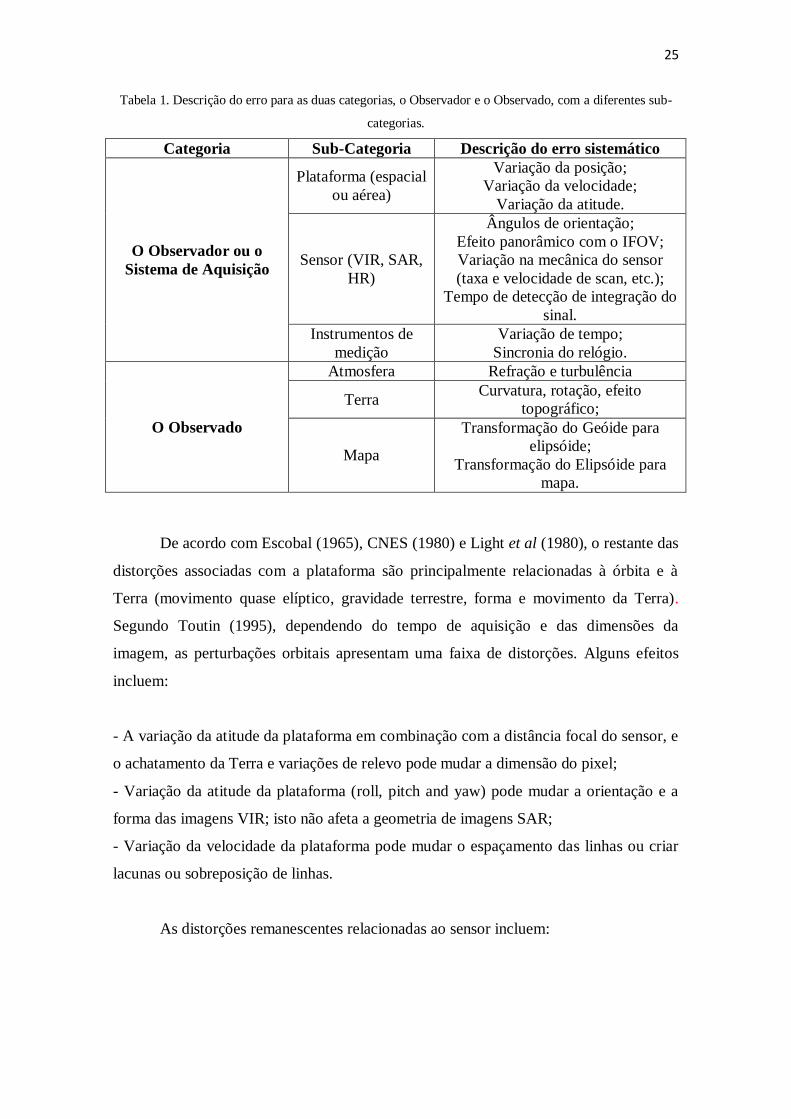
As distorções geométricas apresentadas na Tabela 1 são previsíveis ou
sistemáticas e geralmente bem entendidas. Algumas destas distorções, especialmente
aquelas relacionadas à instrumentação, são geralmente corrigidas nas estações de
recebimento dos dados ou pelas agências de distribuição das imagens. Outras, por
exemplo, àquelas relacionadas à atmosfera, não são consideradas e nem corrigidas
porque são específicas para cada época de aquisição e localização, tendo em vista
também que informações da atmosfera estão raramente disponíveis. Estas também são
negligenciadas para imagens com resoluções espaciais baixas e médias.
25
Tabela 1. Descrição do erro para as duas categorias, o Observador e o Observado, com a diferentes sub-
categorias.
Categoria Sub-Categoria Descrição do erro sistemático
O Observador ou o
Sistema de Aquisição
Plataforma (espacial
ou aérea)
Variação da posição;
Variação da velocidade;
Variação da atitude.
Sensor (VIR, SAR,
HR)
Ângulos de orientação;
Efeito panorâmico com o IFOV;
Variação na mecânica do sensor
(taxa e velocidade de scan, etc.);
Tempo de detecção de integração do
sinal.
Instrumentos de
medição
Variação de tempo;
Sincronia do relógio.
O Observado
Atmosfera Refração e turbulência
Terra Curvatura, rotação, efeito
topográfico;
Mapa
Transformação do Geóide para
elipsóide;
Transformação do Elipsóide para
mapa.
De acordo com Escobal (1965), CNES (1980) e Light et al (1980), o restante das
distorções associadas com a plataforma são principalmente relacionadas à órbita e à
Terra (movimento quase elíptico, gravidade terrestre, forma e movimento da Terra).
Segundo Toutin (1995), dependendo do tempo de aquisição e das dimensões da
imagem, as perturbações orbitais apresentam uma faixa de distorções. Alguns efeitos
incluem:
- A variação da atitude da plataforma em combinação com a distância focal do sensor, e
o achatamento da Terra e variações de relevo pode mudar a dimensão do pixel;
- Variação da atitude da plataforma (roll, pitch and yaw) pode mudar a orientação e a
forma das imagens VIR; isto não afeta a geometria de imagens SAR;
- Variação da velocidade da plataforma pode mudar o espaçamento das linhas ou criar
lacunas ou sobreposição de linhas.
As distorções remanescentes relacionadas ao sensor incluem:

26
- Parâmetros de calibração incertos, tais como distância focal, campo de visada
instantâneo (IFOV) para sensores VIR ou atraso da porta da faixa (timing) para sensores
SAR;
- Distorção panorâmica em combinação com o sistema de visada oblíqua, curvatura da
Terra e relevo topográfico mudam o espaçamento do pixel na superfície ao longo da
coluna na imagem.
As distorções remanescentes relacionadas à Terra incluem:
- Rotação, a qual gera deslocamento dependente da latitude entre linhas de imagens;
- Curvatura, a qual para grandes comprimentos de imagens cria variações na dimensão
do pixel;
- Relevo topográfico, o qual gera uma paralaxe na direção de scanner.
As deformações remanescentes associadas à projeção cartográfica são:
- A aproximação do geóide por um elipsóide de referência;
- A projeção do elipsóide de referência no plano tangente.
Showengerdt (2007) define ainda que as distorções geométricas presentes nas
imagens de Sensoriamento Remoto estão relacionadas à órbita, atitude da plataforma,
propriedades do scanner, e rotação e forma da Terra. Ainda segundo Schowengerdt
(1997), a distorção do modelo orbital está associada a pequenas perturbações como
mudanças no campo gravitacional e na elevação do terreno abaixo da órbita do satélite,
o que ocasiona distorções nos dados adquiridos, tornando-as difíceis de modelá-las
podendo até mesmo ignorá-las. A Figura 2 ilustra o efeito da variação da posição e
atitude da plataforma no processo de aquisição e montagem das imagens de
Sensoriamento Remoto.

27
Figura 2. Erros relacionados à variação da posição, velocidade e atitude da plataforma. Fonte: Adaptado
de Showengerdt, 1983.
2.3. CORREÇÃO GEOMÉTRICA
Segundo Toutin (2004), até a década de 70, o impacto das distorções
geométricas nas imagens era negligenciável, devido a fatores como: imagens de baixa
resolução espacial, obtidas em sua maioria em visada nadiral, produtos gerados eram
analógico e a interpretação era visual. Posteriormente com o avanço da tecnologia e da
possibilidade de exatidão oferecida pelos novos sensores, o impacto das distorções
geométricas é considerável. Ainda segundo Toutin (2004), isto é necessário devido aos
seguintes fatores: as imagens podem ser oblíquas (off-nadir) e de alta resolução (sub-
métrica); os produtos são digitais; a análise das imagens é feita computacionalmente e
de modo semi-automático; a fusão de dados multi-sensoriais é uma realidade; a

28
integração de dados de diferentes formatos (raster/vetor) é uma realidade; há uma
grande demanda por processamento de imagens multi-temporais.
Kardoulas (1996) conclui que a correção geométrica e registro de dados de
sensoriamento remoto são necessários quando a imagem ou um produto derivado desta
imagem, como um índice de vegetação ou uma classificação, for utilizado para uma das
seguintes finalidades: (a) transformar a imagem para sobrepô-la a um mapa; (b)
localizar pontos de interesse em um mapa ou imagem; (c) mosaicar; (d) realizar estudos
multi-temporais e multi-sensores; (e) sobrepor imagens e mapas em um SIG.
Uma vez reconhecido que as imagens obtidas pelas câmaras a bordo de
plataformas orbitais apresentam distorções geométricas sistemáticas, provenientes do
processo de aquisição, e que degradam sua possibilidade de utilização, é necessário que
haja um pré-processamento antes da utilização das mesmas. Este pré-processamento
visa garantir a exatidão da informação espacial extraída, e é efetuado através de uma
modelagem matemática denominada correção geométrica, que objetiva suprimir ou
minimizar todas as distorções geométricas presentes na imagem. Segundo Büyüksalih et
al (2004), o uso de todo o potencial das imagens orbitais, requer uma modelagem
matemática adequada ou uma função de interpolação tridimensional baseada na
geometria e orientação do sensor. Ainda segundo Pinheiro (2003), as imagens que são
capturadas por satélites e transmitidas para a Terra apresentam diversas distorções
geométricas, e essas distorções podem ser eliminadas e/ou reduzidas, por meio de
modelos de correção geométrica.
Schowengerdt (1997) apresenta uma denominação que reúne quatro tipos de
correções geométricas, que geram produtos com maior qualidade à medida que exigem
mais e melhores dados de entrada:
• Registro: assim como descrito em Crosta (1992), esta operação referencia uma
imagem à outra, já corrigida, da mesma área.
• Retificação: é o referenciamento de uma imagem com um mapa. Este autor
denomina este procedimento também de georreferenciamento – termo que não é tão
comum na literatura, apesar de seu uso cotidiano.
• Geocodificação: é um caso especial de retificação que inclui um escalonamento para
um pixel padrão, permitindo que a imagem se ajuste perfeitamente com outras imagens
de diferentes sensores e mapas.

29
• Ortorretificação: correção da imagem, pixel-a-pixel, com relação à distorção
topográfica. Com esta correção toda a imagem parece ser adquirida com visão de topo,
isto é, a imagem fica em uma projeção ortográfica.
A correção geométrica é efetuada através de modelos e funções matemáticas que
dividem-se em 2D e 3D, utilizando coordenadas planimétricas ou planialtimétricas do
sistema de coordenadas terrestre respectivamente. É realizada, ou através de modelos
empíricos 2D/3D (tais como polinomial 2D/3D ou funções racionais 3D) ou com
modelos determinísticos e físicos rigorosos 2D/3D.
Qualquer que seja o modelo utilizado, o método de correção geométrica, e as
etapas do processamento são aproximadamente os mesmos. As etapas de processamento
são:
- Aquisição da imagem e pré-processamento do metadado;
- Aquisição dos pontos terrestre (controle, check, passagem) com coordenadas de
imagem e coordenada X, Y, (Z) de mapa.
- Computação dos parâmetros desconhecidos da função matemática utilizada para o
modelo de correção geométrica para uma ou mais imagens;
- Retificação da imagem com ou sem um Modelo Digital de Elevação.
Segundo D’Alge (1999), o processo de determinação da região geográfica da
imagem corrigida, ou seja, a grade da imagem resultante gerada através do modelo
matemático utilizado para a correção geométrica denomina-se mapeamento direto. O
próximo passo, chamado de mapeamento inverso, determina qual pixel, na imagem
original, corresponde a um certo pixel na imagem de saída. Este mapeamento inverso
raramente gera um valor inteiro, em termos de coordenadas, na imagem original. Por
isso faz-se necessária uma última etapa de interpolação ou reamostragem para que se
definam os níveis de cinza da imagem de saída.
O processo de mapeamento direto e inverso da imagem é efetuado através de
uma transformação, a qual, segundo Novak (1992), se dá através de uma função
analítica, podendo-se utilizar uma aproximação direta ou indireta.
O método indireto utiliza a posição final de cada pixel na imagem corrigida,
determina sua posição na imagem original pela transformação selecionada fx e fy

30
(Equações 1 e 2), e interpola o nível de cinza (NC) por um determinado método de
reamostragem (Figura 3a).
(1)
(2)
Onde, x e y são coordenadas de pixel na imagem original e x’ e y’ são coordenadas de
pixel na imagem resultante e fx e fy são as funções de transformação.
O método direto, por sua vez, considera inicialmente a posição do pixel na
imagem original, transforma suas coordenadas para a imagem final corrigida, e atribui o
valor do nível de cinza do pixel mais próximo (Figura 3b).
Figura 3. Transformação em uma imagem. (a) Método indireto e (b) direto.
Há ainda algumas vantagens e desvantagens associadas aos métodos de
transformação de imagem. De acordo com Mendonça (2009), o método direto é
desvantajoso, pois: é um processo mais complexo; apresenta um elevado esforço
computacional; e trabalha com iterações matemáticas. Já o método indireto é mais
viável, pois: é um processo mais simples; e apresenta um pequeno esforço
computacional.
2.4. ORTORRETIFICAÇÃO
Segundo Andrade (1998), o termo ortorretificação representa o processo de
supressão dos efeitos provenientes da inclinação da plataforma representados pelos

31
ângulos (ômega), (fi) e (Kappa), que também no caso de plataformas orbitais
pode ser denominado atitudes do sensor. Conforme Schowengerdt (1997), a
ortorretificação representa o processo de correção da imagem, pixel por pixel, das
distorções decorrentes do relevo, fazendo com que a imagem seja representada em
perspectiva ortogonal. Ainda segundo Brito (1999), o objetivo da ortorretificação é
gerar uma nova imagem digital (de perspectiva ortogonal) a partir de uma imagem
fotogramétrica (de perspectiva central), sem as distorções introduzidas pela atitude do
sensor durante a formação da imagem e sem os deslocamentos devido ao relevo.
Para Volotão (2001), o processo de ortorretificação digital consiste na correção
da imagem devido às diversas distorções, especialmente as causadas pela posição do
satélite, pela superfície física da Terra (relevo e curvatura) e pela projeção cartográfica.
Segundo Toutin (2004), os fotogrametristas adotaram a expressão ortoimagem
para imagens corrigidas de todos as distorções incluindo às provocadas pelo relevo.
Para o procedimento de ortorretificação, é necessário dispor de informações
sobre o relevo da área imageada. Tais informações podem ser obtidas através de um
Modelo Digital de Elevação (MDE), que é uma representação matemática
computacional da distribuição de um fenômeno espacial que ocorre dentro de uma
região da superfície terrestre (Câmara et al., 2001).
O processo de construção da ortoimagem pela transformação indireta de
imagens é realizado através do mapeamento direto e indireto. No primeiro passo é
construída uma grade em branco com as coordenadas provenientes da aplicação do
modelo matemático e no segundo passo o preenchimento da grade com os níveis de
cinza da imagem sem correção, utilizando interpoladores específicos. A Figura 4 ilustra
o processo.

32
Figura 4. Processo de construção da ortoimagem pela transformação indireta. Fonte: Adaptado de Wiesel
(1985).
2.5. MODELOS MATEMÁTICOS PARA ORTORRETIFICAÇÃO
De acordo com Tonolo e Poli (2003), a correção geométrica 3D, divide-se em
modelagem física ou generalizada. A primeira, baseada no princípio da colinearidade,
utiliza as informações físicas do processo de aquisição da imagem para corrigi-la. Já a
segunda, de forma aproximada, é baseada na utilização de polinômios e razão de
polinômios onde cada conjunto de termos representa uma modelagem específica para
um conjunto de determinados erros sistemáticos. De acordo com Baltsavias et al (2001),
modelos matemáticos tem sido desenvolvidos para corrigir o deslocamento usando o
conhecimento de informações do sensor e modificando as Equações de colinearidade,
em alguns casos incluindo parâmetros para modelagem de erros e orientação interior ou
calibração em órbita. Segundo Toutin (2004), os modelos dividem-se em 2D e 3D
empíricos e físicos rigorosos. Ainda para Tao e Hu (2001), os modelos podem ser
físicos ou Generalizados, sendo que, nos modelos físicos, cada parâmetro tem um
significado físico e uma relação com a posição, e a orientação do sensor, tem uma
relação com um sistema de coordenadas do espaço-objeto.

33
2.5.1. MODELOS FÍSICOS
Os modelos físicos de ortorretificação de imagens de sensores remotos, também
conhecidos como modelos rigorosos, são assim denominados por modelarem o processo
físico, ou seja, com informações de órbita, do sensor e do terreno (Yamakawa e Fraser,
2004). Ainda segundo Di et al (2003), este modelo descreve a geometria de visada e faz
uma transformação entre os espaço objeto e imagem. Para a utilização deste modelo
deve-se dispor da orientação exterior e interior, ou seja, o modelo da plataforma e o
modelo do sensor (Kim e Dowman, 2006). Informações orbitais como: posição,
velocidade e atitude da plataforma, ou ainda, parâmetros orbitais como ascensão reta do
nó ascendente, excentricidade, semi-eixo maior, anomalia média, argumento do perigeu
e inclinação da órbita fazem parte da orientação exterior. Informações do sensor como:
distância focal, tempo de integração das linhas CCD, tamanho do CCD e localização do
ponto principal, fazem parte da orientação interior. Segundo Mikhail et al (2001), o
modelo de sensor, ou orientação interior, define o sensor ou características de câmara
necessárias para a reconstrução dos feixes de raios do espaço objeto a partir dos pontos
imagem correspondentes. Já o modelo de plataforma ou orientação exterior, estabelece a
posição e orientação de um feixe de raios com relação ao sistema de coordenadas do
espaço objeto. Cada feixe de raios requer seis parâmetros independentes, três de posição
e três de orientação.
Segundo Toutin e Cheng (2000), este modelo é o mais acurado por descrever as
características físicas do processo de aquisição.
Este modelo é baseado nas Equações de colinearidade, ou seja, partem do
princípio de que um ponto no espaço imagem, seu homólogo no espaço objeto e o
centro perspectivo da imagem, são colineares. Entretanto, foi proposta uma modificação
na Equação da colinearidade para adequar o modelo à geometria de aquisição de
imagens dos sensores lineares pushbroom, tendo em vista que nestes sensores, cada
linha imageada corresponde a uma imagem diferente (Gugan, 1987, Gugan e Dowman,
1988 e Kratky, 1989). A Equação de colinearidade modificada para sensores lineares
pushbroom segue abaixo.
(3)

34
(4)
Onde:
Xi,Yi e Zi são coordenadas do espaço objeto;
XS, YS e ZS são coordenadas da posição do satélite;
xi, yi são coordenadas da imagem;
-f é a distância focal calibrada do sensor e;
r11 ~ r33 são coeficientes da matriz de rotação.
A matriz de rotação é construída a partir dos ângulos de atitude da plataforma,
também denominados ângulos de Euler ω, φ e κ, e tem o objetivo de alinhar o sistema
de coordenadas de imagem com o sistema de coordenadas de referência. A Equação 5
abaixo apresenta a matriz de rotação e os seus coeficientes em função dos ângulos de
Euler.
(5)
Onde:
As informações de órbita, ou seja, orientação exterior, e das características do
sensor, ou seja, a orientação interior, nem sempre estão disponíveis, o que causa uma
complexidade no desenvolvimento destes modelos.

35
2.5.2. MODELOS GENERALIZADOS
Nem sempre os dados de efemérides e mesmo o modelo do sensor (distância
focal calibrada, coordenadas do ponto principal, distorções das lentes) não são
fornecidos em conjunto com as imagens orbitais. Deste modo, meios alternativos de
modelar a câmara e a plataforma necessitam ser empregados, neste contexto surgem os
modelos generalizados ou não paramétricos.
Muitas abordagens relacionadas a modelos generalizados foram descritas em
Valadan e Sadeghian (2003); Sadeghian e Delavar (2003); Dowman e Tao (2002);
Hanley e Fraser (2001); Tao e Hu (2002). Eles não requerem parâmetros de orientação
interior ou informações de efemérides da órbita da plataforma.
Os métodos de orientação baseados em modelos generalizados, como funções de
polinômios racionais, projeções afins e Transformação Linear Direta (DLT) são
principalmente usados para imagens orbitais de alta resolução (POLI, 2004). Eles
podem ser uma alternativa quando os modelos do sensor e da plataforma não são
fornecidos pelas agências distribuidoras das imagens ou quando estas informações não
estão disponíveis com exatidão suficientes. Conforme descreve Tao et al (2000), os
modelos generalizados ou não paramétricos independem do tipo de plataforma e sensor
e são vastamente utilizados em Sensoriamento Remoto. Segundo Valadan e Sadeghian
(2003), o Modelo de Funções Racionais é um dos modelos de sensores alternativos para
imagens de satélite de alta resolução. Para Tao e Hu (2002), o é um modelo de sensor
que permite a realização da ortorretificação. E ainda segundo Huinca et al (2005), com a
disponibilidade de imagens de alta resolução espacial, o modelo funcional racional vem
sendo largamente empregado em processos de correção geométrica.
2.5.2.1. MODELO DE FUNÇÕES RACIONAIS
Trata-se de um modelo que relaciona coordenadas do espaço objeto com o
espaço imagem através de uma razão de polinômios, podendo ser de grau 1,2 ou 3.
Segundo HU et al (2004), o Modelo de Funções Racionais (RFM) constrói uma
correlação entre coordenadas tridimensionais do espaço objeto (X,Y,Z) e coordenadas
bidimensionais do espaço imagem (linha, coluna), ou vice-versa, assim como o modelo
físico do sensor. O RFM representa uma forma alternativa de modelo de ortorretificação
quando não há a disponibilidade de se trabalhar com o modelo rigoroso baseado nas

36
Equações de Colinearidade. Isto ocorre porque o RFM não necessita de informações
acerca de dados da geometria do sensor e das efemérides da órbita (Tao et al., 2000), e
deste modo, pode ser aplicado a diferentes tipos de sensores.
O número de coeficientes deste modelo, que são denominados rational
polynomial coefficients (RPCs), pode variar, bem como sua forma de aquisição.
Segundo a NIMA (National Imagery and Mapping Agency), agência americana de
mapeamento, é de que tanto o numerador como o denominador possuam 20 termos
cúbicos, ou seja, 80 coeficientes, sendo adotado pela Space Imaging e Digital Globe,
como o número de coeficientes ideal tornando-se uma espécie de padrão (Xu, 2004).
De acordo com Tao e Hu (2001), as razões dos termos de 1º ordem representam
distorções causadas pela projeção óptica, enquanto as correções sobre a curvatura da
Terra, refração atmosférica e distorções das lentes, podem ser modelados pelos termos
de segunda ordem. Outras distorções mais complexas e desconhecidas com
componentes de ordem maior podem ser absorvidas pelos termos de terceiro grau.
Segundo Fraser et al (2006), há dois modos de aquisição dos RPCs. Uma se dá
através da aquisição direta dos mesmos junto à agência distribuidora da imagem, sendo
o caso mais viável, denominado solução independente do terreno. A outra forma se dá
através da utilização de pontos de controle sobre a imagem, em quantidade suficiente,
para o posterior cálculo dos RPCs através de um ajustamento pelo método dos mínimos
quadrados, denominado solução dependente do terreno. Ainda segundo Fraser et al
(2006), esta forma de obtenção de RPCs torna-se impraticável, pela grande quantidade
de pontos de controle requerido. Fraser et al (2006) também relata que o RFM
representa uma aproximação advinda empiricamente da modelagem rigorosa de
orientação do sensor, particularmente uma reparametrização deste modelo.
Segundo Grodecki e Dial (2003), há a possibilidade de utilizar os coeficientes
distribuídos pela agência distribuidora da imagem em conjunto com pontos de controle,
no que utilizando de 3 a 4 pontos de controle, apresentam-se resultados com acurácia
subpixel. Ainda segundo Grodecki (2001), a exatidão do modelo racional polinomial,
difere da exatidão do modelo rigoroso de no máximo 0,04 pixel, enquanto que apresenta
um erro médio quadrático abaixo de 0,01 pixel. Segundo PINHEIRO (2003), o RFM é
um modelo em que suas propriedades são melhores para o ajuste da imagem, uma vez
que, os erros são distribuídos de forma mais uniforme. Trabalhos recentes indicam que
esta técnica não produz bons resultados em todas as situações (Jacobsen, 2007).
Normalmente, o produtor de imagens gera os polinômios a partir dos dados de

37
efemérides e não indiretamente a partir de pontos de controle. Jacobsen (2007) mostra
que é mais confiável apenas corrigir estes polinômios com poucos pontos de controle do
que estimá-los indiretamente. Segundo Sohn et al (2003), a acurácia adequada é
altamente dependente do relevo, do número de pontos de controle e da sua distribuição.
Para OGC (1999), as vantagens do RFM para corrigir as distorções em imagens,
são as seguintes:
· O RFM pode ser usado para todos os tipos de imagens;
· São independentes do sensor e da plataforma do satélite;
Já as limitações do RFM são as seguintes:
· A exatidão é menor quando comparada com o modelo físico ou rigoroso;
· A exatidão é menor nas sobreposições de imagens;
· Tem um processo complexo, para evitar que o denominador da função polinomial seja
zero;
· Não está disponível para todas as imagens distribuídas pelas agências.
O modelo de funções racionais é apresentado nas Equações 6 e 7 abaixo.
(6)
Onde:

38
(7)
Onde:
Onde os coeficientes a e b são os coeficiente da função racional, denominados
RPCs e U,V e W são as coordenadas do espaço objeto normalizadas.
Segundo NIMA (2000), ocorre uma normalização dos dados com objetivo de
minimizar a introdução de erros durante o cálculo e melhorar a estabilidade numérica
das Equações. A normalização ocorre em duas coordenadas na imagem e três
coordenadas de terreno, e, deste modo, cada uma é compensada e escalonada para
ajustar uma variação de distância entre -1.0 a +1.0. A normalização das coordenadas
que são calculadas usam as seguintes Equações (OGC, 1999):
(8)
(9)
(10)
(11)
(12)
Onde:

39
Os parâmetros Oλ, Oφ, Oh, Ol e Oc são os valores compensados para as
coordenadas dos espaços objeto e imagem respectivamente, denominados offsets. E, os
parâmetros SFλ, SFφ, SFh, SFl e SFc são os valores de escala para as coordenadas dos
espaços objeto e imagem respectivamente, denominados scale factor.
Posteriormente ocorre a desnormalização das coordenadas através da seguintes
Equações:
(13)
(14)
Onde L e C são as coordenadas de imagem do nível de cinza da imagem
original, no caso da transformação inversa.
Segundo Tao e Hu (2001), a solução do RFM, pode ser efetuada através de três
metodologias, a saber: solução independente do terreno, solução dependente do terreno
e refinamento da solução independente do terreno. Os subitens a seguir apresentam
estas metodologias.
2.4.2.1.1. SOLUÇÃO INDEPENDENTE DO TERRENO
Na forma independente do terreno, denominado também de 1° método do
Modelo de Funções Racionais, os coeficientes disponibilizados juntamente com a
imagem são importados, desnormalizados e aplicados ao modelo. Posteriormente as
coordenadas de imagem resultantes são desnormalizadas e identificadas na imagem
original. O esquema a seguir mostrado na Figura 5 apresenta o funcionamento deste
método.

40
Figura 5. Estrutura da rotina do método 1.
2.4.2.1.2. SOLUÇÃO DEPENDENTE DO TERRENO
Na forma dependente do terreno, também denominado de 2º método do Modelo
de Funções Racionais, são utilizados pontos de controle medidos em campo para
determinação dos coeficientes da transformação. A partir de um conjunto de amostras
de coordenadas X e Y do espaço objeto, através da aplicação de uma metodologia de
resolução de problema inverso, os coeficientes são determinados. As principais
metodologias utilizadas para resolução de problema inverso são o Método dos Mínimos
Quadrados e o Método de Regularização, como o Thikhonov Regularization. Utiliza-se
as Equações 3 e 4 como ponto de partida para a resolução do problema inverso. A
acurácia desta abordagem demonstra-se dependente da existência de uma grande
quantidade de pontos de controle e também da sua distribuição.
Segundo Tao e Hu (2001), os RPCs desconhecidos podem ser determinados
através de um ajustamento pelo MMQ. A Equação normal é dada pela Equação 20,
onde I é o vetor dos RPCs; T é a matriz design, das Equações de observação
linearizadas (Eq. 3 e 4); W é a matriz peso para uma coordenada de imagem G. A matriz
covariância associada com I é dada pela Equação 21 (Hu et al, 2004), onde R é a
covariância associada à posição da imagem medida.
TTWTI – T
TWG = 0 (15)
P = (TTWT) – 1 + R (16)
Para manejar os possíveis problemas de mau condicionamento durante o
ajustamento, a técnica de regularização de Tikhonov foi sugerida para alterar a Equação

41
normal dentro de uma regularização única. Posteriormente, os RPCs podem ser
determinados iterativamente como segue abaixo:
Ik = Ik-1 + (TTWk-1T + h
2E)-1T
TWk-1wk-1 for k = 1, 2, … (17)
com
I0 = 0, W0 = W(I0) = E (18)
Onde h é o parâmetro de regularização; k é o número de iterações; Wk = W(Ik) é a
matriz peso; wk = G – TIk é o resíduo resultante da iteração.
O esquema a seguir mostrado na Figura 6 apresenta o funcionamento deste
método.
Figura 6. Estrutura da rotina do método 2.
2.4.2.1.3. REFINAMENTO DA SOLUÇÃO INDEPENDENTE DO TERRENO
O refinamento da solução independente do terreno, também denominada de 3º
método, é a metodologia que apresenta a maior exatidão, produzindo resultados bem
próximos dos resultados obtidos com o modelo físico. Trata-se de, posteriormente à
aplicação dos RPCs fornecidos juntamente com as imagens no modelo, uma outra
transformação que elimine os erros sistemáticos restantes (Fraser et al, 2006).
As pesquisas realizadas nos últimos anos sobre os métodos de refinamento da
solução independente do terreno vêm mostrando que existem duas formas de se refinar
os coeficientes da transformação polinomial (Hu et al., 2004). Estes são denominados
42
métodos diretos e indiretos. Os métodos diretos de refinamento atualizam os próprios
coeficientes da transformação, enquanto que os indiretos introduzem transformações no
espaço imagem ou objeto, sem alterar os coeficientes originais.
2.4.2.1.3.1. MÉTODO DIRETO DE REFINAMENTO
Este método divide-se em dois possíveis métodos conforme descreve Hu e Tao
(2002). O primeiro utiliza o conjunto de pontos que foi inicialmente utilizado para
determinação do Modelo de Funções Racionais e mais um conjunto adicional de pontos,
determinado de forma independente em relação aos pontos originais. Este método é
denominado Batch Iterative Least-Squares (BILS) Method. O refinamento pode ser
efetuado incorporando-se o novo conjunto de pontos na Equação normal da solução do
Modelo de Funções Racionais deduzida em Tao e Hu (2001) e em Hu e Tao (2002),
com atribuição dos pesos apropriada para cada conjunto de pontos. Como é necessário o
conhecimento do conjunto original de pontos que foram usados na determinação do
modelo, este método pode ser empregado apenas pela empresa que comercializa as
imagens, pois é normalmente quem tem conhecimento do processo de determinação dos
RPCs fornecidos e, conseqüentemente, dos pontos.
O segundo utiliza somente o conjunto de pontos adicionais, determinados
independentemente dos originais. É denominado Incremental Discrete Kalman Filtering
(IDKF) Method. O modelo pode ser refinado utilizando-se os coeficientes originais e a
matriz variância-covariância dos coeficientes determinados na solução do modelo, que
também é resultante da solução. Hu e Tao (2002) sugerem as empresas que vendem as
imagens de satélite que a matriz variância-covariância dos coeficientes polinomiais
racionais seja incluída nos arquivos de metadados das imagens, o que ajudaria os
usuários a obter melhores resultados com o refinamento da solução independente do
terreno utilizando o método IDKF.
2.4.2.1.3.2. MÉTODO INDIRETO DE REFINAMENTO
Quando os RPCs são determinados com base nas efemérides do satélite e nas
informações de atitude do sensor, sem a utilização de pontos de campo, podem existir
erros lineares sistemáticos (Hu et al., 2004). Nestes casos, uma simples transformação
complementar, como a transformação afim, no espaço imagem normalmente é

43
suficiente para refinar-se a solução independente do terreno. Segundo Fraser et al
(2006), as Equações de compensação dos erros sistemáticos no modelo independente do
terreno são:
(19)
(20)
Onde os parâmetros Ai e Bi são os coeficientes da transformação afim na
imagem.
Há essencialmente três possibilidades de utilização destes parâmetros de
compensação do erro sistemático na transformação:
1) A0, A1, … B2, os quais descrevem uma transformação afim,
2) A0, A1, B0, B1, os quais aplicam somente translação e escala, e
3) A0 e B0, os quais aplicam apenas a translação de coordenadas.
Experiências com imagens de alta e altíssima resolução espacial têm sugerido
que para aplicações mais práticas, uma compensação de erro sistemático efetiva, para
um nível de acurácia de 1 pixel, podem ser obtidas através da utilização somente dos
termos de translação. (Dial e Grodecki, 2002b; Grodecki e Dial, 2003; Hanley et al.,
2002, Fraser e Hanley, 2003, 2005, Baltsavias et al., 2005).
O esquema a seguir mostrado na Figura 7 apresenta o funcionamento deste
método.
Figura 7. Estrutura da rotina do método 3.
44
2.5. SISTEMA DE PROCESSAMENTO DE INFORMAÇÕES
GEORREFERENCIADAS - SPRING
O SPRING é um SIG (Sistema de Informações Geográficas) no estado da arte
com funções de processamento de imagens, análise espacial, modelagem numérica de
terreno e consulta a bancos de dados espaciais.
Segundo Felgueiras (2006), desde 1991 a DPI tem se dedicado ao
desenvolvimento do Sistema de Processamento de Informações Georeferenciadas
(SPRING). A decisão sobre o desenvolvimento de um SIG próprio vem de encontro às
necessidades sempre presentes de se buscar soluções de problemas específicos da
realidade brasileira, assim como, ter-se um domínio tecnológico desse ferramental para
enfrentar novos desafios com total autonomia.
Assim, acompanhando as demandas por um SIG, criadas principalmente por
especialistas do INPE envolvidos com ciências terrestres, para desenvolvimento de
aplicações em áreas de conhecimento relacionadas ao gerenciamento dos recursos
terrestres, as primeiras versões do SPRING objetivavam sua utilização especificamente
dentro desta instituição. Atualmente o SPRING está em sua versão 4.3, e é utilizado por
dezenas de instituições governamentais e não governamentais e empresas públicas e
privadas, do Brasil e de outros países. O SPRING está disponível em três idiomas,
Português, Inglês e Espanhol, e roda em sistemas operacionais compatíveis com o
Windows e com algumas distribuições Linux.
O SPRING é um SIG de propósito geral que contem funcionalidades de entrada
e saída de dados geográficos, de gerenciamento de uma base de dados geográfica, de
processamento de imagens digitais, de modelagem numérica de terreno, de tratamento
de dados temáticos, cadastrais e de redes. O sistema possui, ainda, procedimentos de
análises espaciais individuais e multiníveis possibilitando o desenvolvimento de
aplicações complexas que envolvam análises e integrações de vários tipos de dados
presentes na base de dados. Para saída de dados com qualidade cartográfica existe o
módulo SPRING Carta, SCarta, que contém funcionalidades de um editor gráfico. Esse
editor possibilita a criação de produto cartográfico com os dados de uma base de dados
SPRING acrescidos de textos, símbolos, legendas, grades planimétricas e geográficas
comumente presentes nesses produtos.

45
Ainda segundo Felgueiras (2006), a partir de 1996, o software foi liberado para
ser baixado via internet, e atualmente conta com mais de 70000 usuários do mundo
inteiro cadastrados na página de download do software. A distribuição do SPRING é do
tipo livre (“freeware”), sem custo para acesso e uso. As versões atuais, e também as
antigas mais recentes, ficam disponíveis no site da internet,
http://www.dpi.inpe.br/spring.
O SPRING foi desenvolvido em linguagem C++ para sistemas operacionais
compatíveis com Windows e com Unix. Atualmente as versões são desenvolvidas para
Windows e Linux compatível com algumas distribuições tais como o Fedora e o
RedHat.
Desde 2004 o SPRING vem tendo seu desenvolvimento apoiado por uma
parceira privada, a K2FS Sistemas e Projetos Ltda. No ano de 2005 o trabalho principal
realizado pela K2FS Sistemas e Projetos Ltda foi a migração das janelas de interação
com o usuário para usar o pacote de interface gráficas QT versão 3 (QT3) da Trolltec.
Esse trabalho possibilitou o lançamento concomitante da versão 4.3 para os sistemas
operacionais Windows e Linux. No ano de 2006 a DPI/INPE, com apoio da K2FS
Sistemas e Projetos Ltda, desenvolveu a versão 5.0 do SPRING. Esta versão teve várias
inovações, comparando-a com a versão 4.3, principalmente em relação à interatividade
do usuário com o software. Atualmente a última versão é a 5.1.4.

46
3. MATERIAIS E MÉTODOS
Neste Capítulo são apresentados os materiais e métodos usados para a realização
do trabalho.
3.1. DADOS DE SENSORIAMENTO REMOTO
Para a realização dos testes a das avaliações foram utilizadas:
- Quatro imagens Ikonos, duas multiespectrais e duas pancromáticas com resolução
espacial de 4 e 1metros respectivamente;
- Quatro imagens Quickbird, duas multiespectrais e duas pancromáticas com resolução
espacial de 2,4 e 0,6 metros respectivamente;
- Uma imagem CBERS 2B, sensor HRC com resolução espacial de 2,5 metros;
- Os coeficientes polinomiais racionais (RPCs) referentes à todas as imagens utilizadas;
- Modelo Digital de Elevação Aster GDEM com resolução espacial de 30 metros da
região coberta pela imagem Quickbird;
- Modelo Digital de Elevação Aster GDEM com resolução espacial de 30 metros da
região coberta pela imagem HRC;
3.2. DADOS CARTOGRÁFICOS
Os dados cartográficos utilizados neste trabalho apresentam-se a seguir.
- Curvas de nível, em formato digital, extraídas de ortofotos obtidas em 1999 (escala da
foto 1:8000), com restituição para a escala de 1:2000, fornecida pela Prefeitura
Municipal do Rio de Janeiro;
- Mapa do Rio de Janeiro para localização da áreas de teste, obtidas junto ao setor de
GIS da empresa K2FS Sistemas e Projetos Ltda.
3.3. SOFTWARES APLICATIVOS
Os aplicativos e bibliotecas utilizados neste trabalho estão listados abaixo.

47
- Microsoft Visual C++ 2005, utilizado para a construção da rotina de ortorretificação
por Modelo de Funções Racionais;
- Scilab 5.2, utilizado para a montagem preliminar do algoritmo;
- Biblioteca geográfica Terralib, utilizada nos processos cartográficos e geodésicos do
processo de ortorretificação;
- SPRING 5.1.3, utilizado para a geração do Modelo Digital de Elevação (MDE) da
região de cobertura das imagens Ikonos;
- PCI Geomática v 9.0, utilizado como referência para avaliação das ortoimagens
geradas pelo K2ORTHO;
- ENVI 4.3, utilizado como referência para avaliação das ortoimagens geradas pelo
K2ORTHO;
- ERDAS IMAGINE 9.1, utilizado como referência para avaliação das ortoimagens
geradas pelo K2ORTHO;
- O módulo Calc do BR Office, para a avaliação estatística.
3.4. PREPARAÇÃO DOS DADOS
O trabalho iniciou-se a partir de uma pesquisa inicial sobre todos os métodos e
modelos matemáticos 3D de correção geométrica de imagens. Após a identificação dos
modelos, ocorreu um estudo profundo dos mesmos e posteriormente a escolha do qual
seria adotado.
Foram estudados alguns modelos físicos disponíveis atualmente, como os
modelos de Toutin (Toutin, 1985), de Orun e Natarajan (Orun e Natarajan, 1994) de
Valadan (Valadan e Petrie, 1998), de Daniela Poli (Poli, 2003) e de Gianone (Gianone,
2006), bem como os modelos generalizados, como o Modelo de Funções Racionais
(RFM)(Fraser et al, 2006), o modelo Affine Projecion Model (APM) (Fraser et al.,
2001) e o modelo de Transformação Linear Direta (DLT) (Mikhail et al., 2001).
Foram consultados artigos e periódicos nacionais e internacionais da
comunidade de Sensoriamento Remoto e Fotogrametria, e, posteriormente foi efetuada
uma consultoria junto à empresa GISPLAN Tecnologia da Geoinformação para
obtenção de informações complementares para o término da construção preliminar do
algoritmo de ortorretificação.
A escolha do modelo foi efetuada em uma reunião na DPI do INPE no dia
10/06/2009, onde foram analisados cada detalhe dos modelos propostos, de acordo com

48
a exatidão apresentada, a disponibilidade de informações necessárias à implementação,
a complexidade e o tempo de implementação.
Dente os modelos físicos e generalizados propostos, foi escolhido um modelo
generalizado, o Modelo de Funções Racionais. A escolha deste se deu em função da sua
relativa acurácia em relação aos modelos físicos, da disponibilidade de informações
para a implementação, por ser relativamente menos complexo e pelo fato de que cada
vez mais as agências distribuidoras das imagens disponibilizam os dados necessários
para utilização deste modelo, indicando deste modo, uma tendência futura de ampla
utilização do mesmo.
3.5. ESTRUTURAÇÃO DO ALGORITMO
O primeiro passo para o processo de ortorretificação por Modelo de Funções
Racionais é dispor da imagem e do arquivo RPC referente à esta e de um MDE da
mesma área recoberta pela imagem. A partir destas informações há uma série de
transformações e procedimentos que resultam na imagem ortorretificada.
Uma vez que a transformação inversa propõe um esforço computacional menor,
não necessita de iterações matemáticas e não permite efeito de “buracos” de oclusão na
imagem final, esta foi adotada para a rotina. Deste modo, a priori, tem-se o processo de
mapeamento direto, que define a região geográfica a qual a imagem ortorretificada
pertence. Neste processo é criado um raster vazio de informações, somente com
coordenadas de imagem (L,C), que é o ponto de partida para a construção da
ortoimagem. A partir das coordenadas de imagem (L,C) da grade vazia, através da
correção geométrica (ℵ-1), obtém-se as coordenadas planas da ortoimagem, geralmente
coordenadas do sistema UTM, ou seja, E e N. Posteriormente, estas coordenadas planas
são associadas a uma projeção cartográfica (℘-1), escolhida pelo usuário, a qual é feita
através de uma transformação de coordenadas planas para coordenadas geodésicas,
latitude e longitude (φ, λ). A posteriori, inicia-se o processo de mapeamento direto, que
irá preencher o raster vazio com os níveis de cinza da imagem original.
Uma vez de posse do raster vazio com cada pixel deste associado a uma
coordenada geodésica, e em uma determinada projeção cartográfica, parte-se para o
processo de obtenção da informação altimétrica, contida no Modelo Digital de Elevação
(MDE). Este por sua vez pode estar em um datum diferente da imagem de saída, e ainda
diferente da imagem de entrada. Para tanto, deve-se considerar um processo a mais,

49
denominado Transformação de datum (Φ), atrelado à possibilidade do usuário não
efetuar a compatibilização de datum do MDE para o processo, ou ainda do usuário
escolher outro datum para a imagem de saída.
Antes ainda de ocorrer a obtenção do valor de altitude do MDE, pode ocorrer
outro procedimento semelhante ao que ocorre na obtenção das coordenadas geodésicas
a partir das planas. Há a possibilidade de o MDE apresentar coordenadas planas e, deste
modo, pode se tornar necessária a transformação de coordenadas geodésicas em
coordenadas planas e posteriormente para coordenadas de imagem do MDE (L,C)MDE
para a extração do nível de cinza associado à altitude (H). Se o MDE estiver
geocodificado em coordenadas geodésicas dispensa-se este processo. A partir deste
ponto, uma vez que o MDE e o raster vazio estejam com o mesmo datum, ocorre um
processo de interpolação para a obtenção da altitude (H) no MDE. Este processo de
interpolação é necessário em função de nem sempre o centro de um pixel da grade vazia
estar contido em um mesmo centro de pixel do MDE, e deste modo associar diferentes
valores de altitude (H). A interpolação pode ser escolhida pelo usuário entre as opções
de vizinho mais próximo, bilinear ou convolução cúbica. Posteriormente, ocorre a
transformação de datum com o objetivo de compatibilizar o datum do MDE com o
datum da imagem de entrada. Após todo este processo, as coordenadas geodésicas
tridimensionais latitude, longitude a altitude (φ, λ, H) são reunidas e importadas para o
processo da transformação polinomial do Modelo de Funções Racionais (P3).
Na transformação polinomial, primeiramente são lidos os coeficientes da
transformação (RPCs) a partir do arquivo metadado que os contém, e são aplicados na
função racional. Em seguida é feita a desnormalização, descrita na seção 2.4.2.1, a partir
dos dados de offset e scale factor, presentes também no metadado, e das coordenadas
geodésicas e de imagem de cada um dos pixels do raster vazio. São calculados a partir
daí os valores de U,V, W, e, aplicando-os na função racional descrita também na seção
2.4.2.1, inicia-se o processo de obtenção do nível de cinza (NC) da imagem bruta para o
preenchimento da grade vazia. Como o centro dos pixels da grade vazia pode não
coincidir com o centro dos pixels da imagem de entrada, obtendo assim diferentes
níveis de cinza, é necessária uma interpolação ou reamostragem para definir o valor do
pixel de saída. Esta interpolação também pode ser escolhida pelo usuário entre as
opções de vizinho mais próximo, bilinear ou convolução cúbica. Terminado este
processo, a grade vazia é preenchida com os níveis de cinza interpolados da imagem
original e cada pixel apresenta uma coordenada de imagem ortorretificada (L,C)RPC.

50
Desta forma é construída a ortoimagem, que é enviada à um diretório no Sistema
Operacional escolhido pelo usuário antes do início da rotina. O processo ilustrado é
apresentado na Figura 8.
Figura 8. Estrutura do algoritmo de Ortorretificação por Modelo de Funções Racionais. Fonte: Silva
(2007).
3.6. BIBLIOTECA GEOGRÁFICA
Com o objetivo de simplificar a construção da rotina, ou seja, de evitar a
construção manual de certos procedimentos geodésicos e cartográficos, bem como de
imagens digitais e de Sensoriamento Remoto, foi escolhida uma biblioteca geográfica
que atendesse às necessidades do algoritmo proposto. A biblioteca escolhida foi a
biblioteca TerraLib que é uma biblioteca de classes escritas em C++ para a construção
de aplicativos geográficos, com código fonte aberto e distribuída como um software
livre.
As funções selecionadas foram pesquisadas e estudadas antes da sua utilização,
para verificação do processo envolvido (TerraLib, 2009). As funções foram utilizadas à
medida que foram surgindo a necessidade de processamentos específicos. Alguns
exemplos seguem a seguir. Para a geração da grade vazia, somente com coordenadas de

51
imagem (L,C), foi utilizada a função BoxRaster. Para a transformação das coordenadas
imagem do raster vazio (L,C) para coordenadas planas (E, N), através da correção
geométrica (ℵ-1), foi utilizada a função IndexToCoord. Posteriormente, para a
associação das coordenadas planas às coordenadas geodésicas (℘-1) foi utilizada a função
PCtoLL. Para a possibilidade de haver transformação de datum (Φ) foi inserida a função
ChangetoLL. Para a transformação de coordenadas planas ou geodésicas para as
coordenadas imagem do MDE (L, C)MDE, e sua posterior leitura, foi utilizada a função
CoordToIndex. A função Interpolate foi utilizada para a interpolação dos valores de
altitude (H) do MDE e dos valores de nível de cinza (NC) da imagem original para o
raster vazio. A Figura 9 abaixo apresenta parte do código fonte utilizando-se algumas
funções citadas acima.
Figura 9. Parte integrante do código fonte onde são utilizadas algumas funções da biblioteca TerraLib.
3.7. PREPARAÇÃO DA BASE DE DADOS
Para o início do conjunto de testes da rotina, fez-se necessária a obtenção e
preparação de dados de cartográficos e de Sensoriamento Remoto.
Foi gerado um Modelo Digital de Elevação para a área recoberta pelas imagens
Ikonos, a partir de um arquivo digital de curvas de nível. Estas foram extraídas de
ortofotos obtidas em 1999 (escala da foto 1:8000), com restituição para a escala de

52
1:2000, fornecida pela Prefeitura Municipal do Rio de Janeiro. Para este procedimento
utilizou-se o software SPRING.
Os Modelos Digitais de Elevação necessários para a ortorretificação das imagens
Quickbird e HRC/CBERS 2B foram resultantes de um par estereoscópico de imagens
ASTER. Estes Modelos são disponibilizados gratuitamente através da internet no sítio
http://www.gdem.aster.ersdac.or.jp/ e são denominados ASTER GDEM, apresentando
resolução espacial de 30 metros.
3.8. IMPLEMENTAÇÃO E INTERFACE
A implementação inicial do algoritmo ocorreu no aplicativo Scilab 5.2, para
verificação da estrutura geral do modelo. Posteriormente, a implementação do algoritmo
foi efetuada no aplicativo Microsoft Visual C++ 2005 com a inserção das funções da
biblioteca geográfica TerraLib. Aproveitou-se a estrutura inicial do código fonte do
aplicativo K2 ImagePro, juntamente com algumas funções da biblioteca QT. Após a
primeira identificação e correção dos bugs, no dia 16/06/2009, o código foi compilado e
gerado o primeiro executável juntamente com as DLL’s. Ocorreram mais dois processos
de identificação e correção de bugs, bem como a otimização da rotina no que diz
respeito ao tempo de geração da ortoimagem, e no dia 03/12/2009 foi gerado a última
atualização do executável. A partir daí começaram as atividades de testes e avaliações
das ortoimagens geradas. Apesar da rotina não ter uma interface para operação, há uma
interface de comunicação com o usuário. Para a realização do processo há dois arquivos
com extensões .IPR e .LUA no qual o usuário insere os parâmetros de entrada e de
saída. Há ainda um diretório denominado “dados”, no qual a imagem original, o arquivo
RPC, o Modelo Digital de Elevação (MDE) e a imagem ortorretificada são alocados.
Em um primeiro instante, no arquivo config.IPR o usuário indica o nome do
arquivo da imagem original e o nome do arquivo do MDE, com a opção também de
alterar o diretório de busca destes arquivos.
No segundo passo, no arquivo imagepro.LUA, o usuário indica o nome do
arquivo RPC a ser utilizado, define o nome do arquivo da imagem ortorretificada e o
diretório onde a mesma será alocada.
3.9. ORTOIMAGEM NOS SOFTWARES COMERCIAIS

53
Com o objetivo de avaliar e comparar estatisticamente as ortoimagens geradas
pela rotina K2ORTHO com outros aplicativos, foram geradas ortoimagens a partir dos
softwares disponíveis mais utilizados pelas comunidades de Sensoriamento Remoto e
Fotogrametria. Foram utilizados os aplicativos PCI Geomática 9.0, ENVI 4.3 e ERDAS
IMAGINE 9.1.
3.10. AVALIAÇÃO ESTATÍSTICA
Após a geração das imagens ortorretificadas, a análise estatística das mesmas
faz-se necessária para a validação da exatidão da ferramenta. A análise foi efetuada
comparando-se os dados gerados pelo K2ORTHO com dados gerados nos softwares
PCI Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1, que são atualmente softwares
comerciais amplamente utilizados dentro das comunidades.
A análise foi feita identificando-se pixels homólogos nas ortoimagens geradas
pelos quatro softwares e guardando as coordenadas planimétricas dos mesmos. Apesar
das diferenças de nível de cinza de cada pixel, particular de cada ortoimagem gerada por
cada software, todos os pixels analisados foram bem identificáveis em todas as
ortoimagens.
Após a definição do número de amostras, identificação dos pixels homólogos e
exportação das coordenadas planimétricas UTM dos mesmos, foram calculados os
deslocamentos nas componentes E e N e os deslocamentos resultantes. Estes
deslocamentos foram calculados comparando-se as ortoimagens geradas pelo SPRING
em relação ao PCI Geomática 9.0, SPRING em relação ao ENVI 4.3 e SPRING em
relação ao ERDAS IMAGINE 9.1. Como forma de avaliação complementar comparou-
se as ortoimagens geradas pelos aplicativos comerciais em relação a eles mesmos.
Todas as ortoimagens foram geradas utilizando como interpolador o Vizinho mais
Próximo. Com base na metodologia de avaliação apresentada por Galo e Camargo
(1994), foram calculadas posteriormente a média amostral, o desvio padrão amostral, o
erro padrão e o RMSE (Root Mean Square Error) de cada deslocamento. O desvio
padrão com a finalidade de analisar a discrepância dos dados, o erro padrão para indicar
a precisão e o RMSE para indicar a acurácia ou exatidão dos dados obtidos. As
Equações de deslocamento, média amostral, desvio padrão amostral, erro padrão e
RMSE seguem abaixo:

54
Deslocamentos em metros:
ΔE = ESPRING – EPCI , ΔE = ESPRING – EENVI , ΔE = ESPRING – EERDAS (21)
ΔN = NSPRING – NPCI , ΔN = NSPRING – NENVI , ΔN = NSPRING – NERDAS (22)
Média amostral:
µΔE = ∑ ∆E / n (23)
µΔN = ∑ ∆N / n (24)
Desvio Padrão amostral:
SΔE = {[∑(∆Ei – µΔE)2] / [n – 1]}
0,5 (25)
SΔN = {[∑(∆Ni – µΔN)2] / [n – 1]}
0,5 (26)
Erro Padrão:
EPΔE = SΔE / (n)0,5
(27)
EPΔN = SΔN / (n)0,5
(28)
RMSE:
RMSEΔE = [(∑∆E2) / n]
0,5 (29)
RMSEΔN = [(∑∆N2) / n]
0,5 (30)
Posteriormente foram realizados testes de precisão através do teste da
distribuição do Qui-quadrado, analisando o Qui-quadrado amostral em relação ao
teórico obtido em Tabela, e testes de análise de tendências baseados na distribuição t de
student.
3.10.1. ANÁLISE DE PRECISÃO
A análise da precisão pôde ser feita comparando-se o desvio-padrão das
discrepâncias com o erro padrão (EP) esperado para o limite de exatidão no qual se
deseja testar. Portanto o teste de hipótese a ser formulado é o seguinte:
H0: SΔE2 = σ
2ΔE
SΔN2 = σ
2ΔN
contra

55
H1: SΔE2 > σ
2ΔE
SΔN2 > σ
2ΔN
Os termos SΔE e SΔN correspondem ao desvio-padrão esperado para as
coordenadas E e N, que nada mais são do que o erro-padrão esperado para uma
determinada análise. O erro padrão fixado para determinado trabalho pode ser calculado
através da Equação abaixo:
σ = EP / 2 (31)
Onde EP é o erro padrão aceitável para o trabalho. No caso desta análise
considerou-se o EP como o valor da resolução espacial da imagem analisada adicionada
de sua metade.
Para que a hipótese H0 contra H1 fosse testada foi calculado um qui-quadrado
amostral e logo após comparou-se este com o valor teórico obtido através da
distribuição de probabilidade do qui-quadrado (χ2). O teste qui-quadrado amostral pode
ser obtido utilizando-se as seguintes Equações:
χ2
ΔE = SΔE2/σ
2 (n – 1) (34)
χ2
ΔN = SΔN2/σ
2 (n – 1) (35)
Logo após foi verificado se o valor calculado acima está no intervalo de
aceitação, ou seja:
χ2
ΔE ≤ χ2
1-αn-1
χ2
ΔN ≤ χ2
1-αn-1
Se a relação acima for verdadeira, a análise atende a precisão estipulada para
determinado trabalho.

56
3.10.2. ANÁLISE DE TENDÊNCIAS
Para os testes de análise de tendências, utilizou-se a estatística amostral baseada
no teste t de Student. Com o objetivo de verificar se o valor de t amostral está no
intervalo de aceitação ou rejeição da hipótese nula. Ou seja:
H0: µ = 0
contra
H1: µ ≠ 0
O valor de t amostral deve ser calculado através da seguinte Equação:
tµ = (µ / Sµ) (n)0,5
(36)
Onde:
µ = Média amostral
Sµ = Desvio padrão amostral
n = n° de amostras
O intervalo de confiança é dado por:
| tµ | < t (n-1, α/2)
Uma vez que a estatística amostral t esteja fora do intervalo de confiança,
rejeita-se a hipótese nula, ou seja, a ortoimagem não pode ser considerada como livre de
tendências significativas nas coordenadas testadas, para um determinado nível de
confiança. Se esses intervalos forem simultaneamente verdadeiros a hipótese H0 é válida
e a imagem está livre de tendências significativas. O nível de confiança adotado foi 1-
α/2 = 95%.

57
4. RESULTADOS
Neste capítulo serão apresentados os resultados estatísticos obtidos a partir da
comparação das ortoimagens geradas pela rotina K2ORTHO e pelos softwares
comerciais utilizados como referência. Ainda serão apresentados a avaliação estatística
comparativa dos resultados entre os softwares comerciais como efeito de avaliação
complementar dos limites de aceitação dos resíduos.
4.1. IMAGENS IKONOS
Foram utilizadas quatro imagens Ikonos: duas multiespectrais e duas
pancromáticas, com resoluções espaciais de 4 metros e 1 metro respectivamente.
4.1.1. IMAGEM MULTIESPECTRAL IKONOS 00
Na primeira ortoimagem multiespectral, denominada de Multiespectral Ikonos
00, foram obtidos 81 check points (CP) distribuídos homogeneamente sobre toda a
região da imagem. Estes 81 CP foram identificados nas quatro ortoimagens geradas,
pelo K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1, e
posteriormente calculadas as diferenças planimétricas entre as coordenadas UTM
associadas a estes CPs. As coordenadas UTM em metros obtidas através dos 81 CPs
para as ortoimagens Multiespectral Ikonos 00 geradas pelos quatro softwares são
apresentadas no Apêndice A, na Tabela A1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 81 CPs para as ortoimagens Multiespectral Ikonos 00 para os quatro
softwares são apresentadas no Apêndice A, na Tabela A2. Na Tabela A3 do Apêndice
A, são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 81 CPs para as ortoimagens Multiespectral Ikonos 00 geradas pelos
três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros, entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 2.

58
Tabela 2. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Multiespectral
Ikonos 00
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
1,27 2,70 1,49 1,42 2,15 0,44
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
1,26 0,98 0,97 0,92 0,15 0,94
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,14 0,11 0,11 0,10 0,02 0,10
RMSE RMSE RMSE RMSE RMSE RMSE
1,79 2,87 1,78 1,69 2,16 1,04
.
Como avaliação complementar e análise dos limites de resíduo aceitáveis, os
resultados da avaliação estatística efetuada sobre as diferenças planimétricas em metros
entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos comerciais
encontram-se abaixo na Tabela 3.
Tabela 3. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelos aplicativos comerciais para a imagem Multiespectral Ikonos 00.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
Média Média Média Média Média Média
1,81 2,38 1,94 1,38 3,10 2,51
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
1,20 1,47 1,43 0,88 0,62 0,86
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,13 0,16 0,16 0,10 0,07 0,10
RMSE RMSE RMSE RMSE RMSE RMSE
2,17 2,80 2,41 1,64 3,16 2,65
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 4. Para a análise de precisão foram considerados: erro padrão aceitável de 6
metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado de
4,2426 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 96,578. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,664.

59
Tabela 4. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os aplicativos
comerciais para a imagem Multiespectral Ikonos 00.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
15,928 9,552 9,363 8,404 0,220 8,916
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
9,030 24,830 13,876 13,970 130,502 4,213
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 5. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 5. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Multiespectral Ikonos 00.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
14,452 21,605 20,494 7,794 3,853 7,438
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
13,554 14,577 12,186 14,094 44,929 26,153
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Multiespectral Ikonos 00 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais encontram-se no Apêndice A, Figura A1.

60
4.1.2. IMAGEM MULTIESPECTRAL IKONOS 03
Na segunda imagem multiespectral analisada, denominada de Multiespectral
Ikonos 03, foram obtidos 41 check points (CP) distribuídos homogeneamente sobre toda
a região da imagem. Estes 41 CP foram identificados nas quatro ortoimagens geradas
pelos quatro softwares, e posteriormente calculadas as diferenças planimétricas em
metros entre as coordenadas UTM associadas a estes CPs. As coordenadas UTM em
metros obtidas através dos 41 CPs para as ortoimagens Multiespectral Ikonos 03
geradas pelos quatro softwares são apresentadas no Apêndice B, na Tabela B1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 41 CPs para as ortoimagens Multiespectral Ikonos 03 para os quatro
softwares são apresentadas no Apêndice B, na Tabela B2. Na Tabela B3 do Apêndice B,
são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 41 CPs para as ortoimagens Multiespectral Ikonos 03 geradas pelos
três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 6.
Tabela 6. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Multiespectral
Ikonos 03.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
1,51 2,88 1,78 1,27 1,80 1,76
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
1,11 0,35 1,45 0,83 1,44 1,18
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,17 0,06 0,23 0,13 0,23 0,18
RMSE RMSE RMSE RMSE RMSE RMSE
1,86 2,90 2,29 1,51 2,30 2,11
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 7.
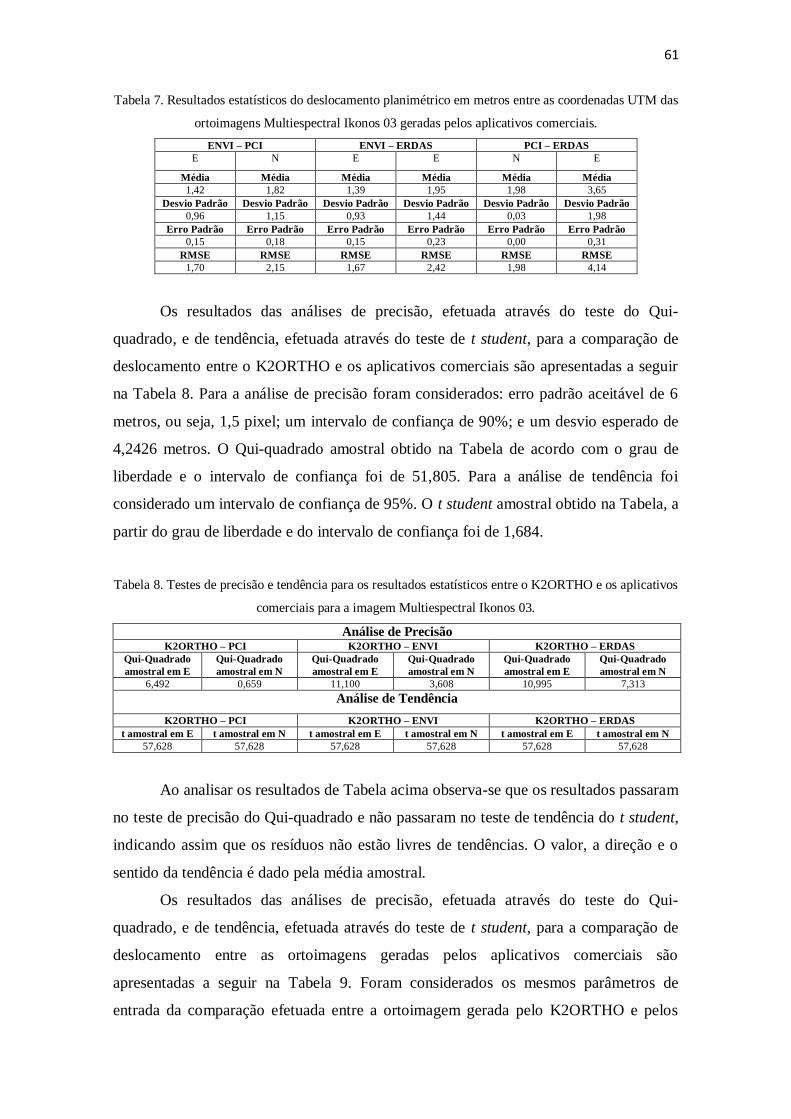
61
Tabela 7. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM das
ortoimagens Multiespectral Ikonos 03 geradas pelos aplicativos comerciais.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
1,42 1,82 1,39 1,95 1,98 3,65
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,96 1,15 0,93 1,44 0,03 1,98
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,15 0,18 0,15 0,23 0,00 0,31
RMSE RMSE RMSE RMSE RMSE RMSE
1,70 2,15 1,67 2,42 1,98 4,14
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 8. Para a análise de precisão foram considerados: erro padrão aceitável de 6
metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado de
4,2426 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 51,805. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,684.
Tabela 8. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os aplicativos
comerciais para a imagem Multiespectral Ikonos 03.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
6,492 0,659 11,100 3,608 10,995 7,313
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
57,628 57,628 57,628 57,628 57,628 57,628
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 9. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos

62
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 9. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Multiespectral Ikonos 03.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
4,886 6,981 4,617 11,032 0,004 20,691
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
57,628 57,628 57,628 57,628 57,628 57,628
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Multiespectral Ikonos 03 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais são apresentadas no Apêndice B, Figura B1.
4.1.3. IMAGEM PANCROMÁTICA IKONOS 00
Na primeira imagem pancromática analisada, denominada de Pancromática
Ikonos 00, foram obtidos 81 check points (CP) distribuídos homogeneamente sobre toda
a região da imagem. Estes 81 CP foram identificados nas quatro ortoimagens geradas,
pelo K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1, e
posteriormente calculadas as diferenças planimétricas entre as coordenadas UTM
associadas a estes CPs. As coordenadas UTM em metros obtidas através dos 81 CPs
para as ortoimagens Pancromática Ikonos 00 geradas pelos quatro softwares são
apresentadas no Apêndice C, na Tabela C1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 81 CPs para as ortoimagens Pancromática Ikonos 00 para os quatro
softwares são apresentadas no Apêndice C, na Tabela C2. Na Tabela C3 do Apêndice C,
são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 81 CPs para as ortoimagens Pancromática Ikonos 00 geradas pelos
três softwares comerciais.

63
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 10.
Tabela 10. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Pancromática
Ikonos 00.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
1,33 1,70 0,48 0,49 0,50 0,30
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,52 0,50 0,31 0,32 0,19 0,21
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,06 0,06 0,03 0,04 0,02 0,02
RMSE RMSE RMSE RMSE RMSE RMSE
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 11.
Tabela 11. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelos aplicativos comerciais para a imagem Pancromática Ikonos 00.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
1,81 2,19 0,52 0,19 1,50 2,00
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,42 0,40 0,23 0,23 0,36 0,35
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,05 0,04 0,03 0,03 0,04 0,04
RMSE RMSE RMSE RMSE RMSE RMSE
1,51 1,69 0,41 0,37 1,46 1,65
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 12. Para a análise de precisão foram considerados: erro padrão aceitável de
1,5 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 1,0606 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 96,578. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,664.

64
Tabela 12. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Pancromática Ikonos 00.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
10,803 9,986 3,749 3,969 1,430 1,848
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
23,033 30,621 14,110 14,000 23,797 12,560
Ao analisar os resultados da Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 13. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 13. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Pancromática Ikonos 00.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
7,108 6,386 2,038 2,070 5,133 4,938
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
38,644 49,327 20,734 7,517 37,684 51,229
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Pancromática Ikonos 00 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais são apresentadas no Apêndice C, Figura C1.
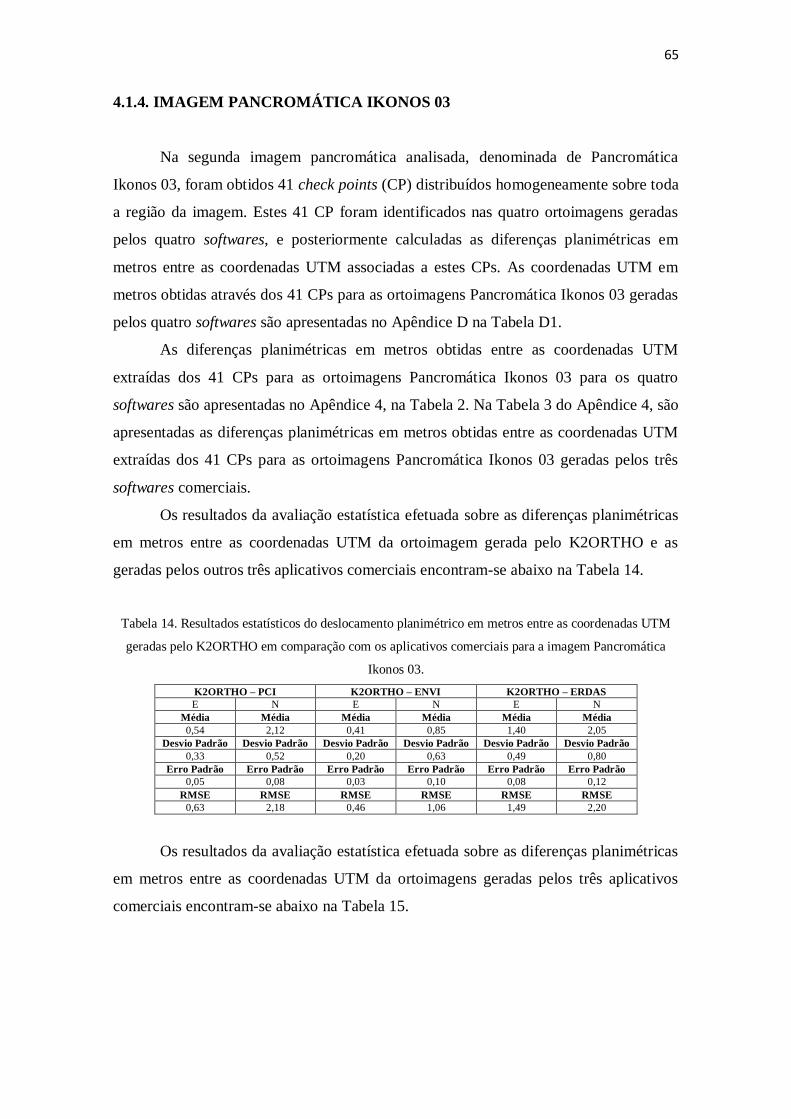
65
4.1.4. IMAGEM PANCROMÁTICA IKONOS 03
Na segunda imagem pancromática analisada, denominada de Pancromática
Ikonos 03, foram obtidos 41 check points (CP) distribuídos homogeneamente sobre toda
a região da imagem. Estes 41 CP foram identificados nas quatro ortoimagens geradas
pelos quatro softwares, e posteriormente calculadas as diferenças planimétricas em
metros entre as coordenadas UTM associadas a estes CPs. As coordenadas UTM em
metros obtidas através dos 41 CPs para as ortoimagens Pancromática Ikonos 03 geradas
pelos quatro softwares são apresentadas no Apêndice D na Tabela D1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 41 CPs para as ortoimagens Pancromática Ikonos 03 para os quatro
softwares são apresentadas no Apêndice 4, na Tabela 2. Na Tabela 3 do Apêndice 4, são
apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 41 CPs para as ortoimagens Pancromática Ikonos 03 geradas pelos três
softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 14.
Tabela 14. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Pancromática
Ikonos 03.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
0,54 2,12 0,41 0,85 1,40 2,05
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,33 0,52 0,20 0,63 0,49 0,80
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,05 0,08 0,03 0,10 0,08 0,12
RMSE RMSE RMSE RMSE RMSE RMSE
0,63 2,18 0,46 1,06 1,49 2,20
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 15.

66
Tabela 15. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
das ortoimagens Pancromática Ikonos 03 geradas pelos aplicativos comerciais.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
0,56 2,21 1,28 1,96 1,80 4,17
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,41 0,81 0,32 0,60 0,47 0,50
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,06 0,13 0,05 0,09 0,07 0,08
RMSE RMSE RMSE RMSE RMSE RMSE
0,69 2,34 1,31 2,02 1,85 4,15
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 16. Para a análise de precisão foram considerados: erro padrão aceitável de
1,5 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 1,0606 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 51,805. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,684.
Tabela 16. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Pancromática Ikonos 03.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
2,146 5,306 0,784 7,904 4,893 12,662
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
10,561 26,317 13,251 8,672 18,161 16,518
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 17. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos

67
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 17. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Pancromática Ikonos 03.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
3,397 13,121 2,015 7,163 4,407 5,018
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
8,651 17,452 25,833 20,995 24,582 53,305
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Pancromática Ikonos 03 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais são apresentadas no Apêndice D, Figura D1.
4.2. IMAGENS QUICKBIRD
Foram utilizadas quatro imagens Quickbird: duas multiespectrais e duas
pancromáticas, com resoluções espaciais de 2,4 metros e 0,6 metros respectivamente.
4.2.1. IMAGEM MULTIESPECTRAL QUICKBIRD 00
Na primeira ortoimagem multiespectral, denominada de Multiespectral
Quickbird 00, foram obtidos 81 check points (CP) distribuídos homogeneamente sobre
toda a região da imagem. Estes 81 CP foram identificados nas quatro ortoimagens
geradas, pelo K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1, e
posteriormente calculadas as diferenças planimétricas entre as coordenadas UTM
associadas a estes CPs. As coordenadas UTM em metros obtidas através dos 81 CPs
para as ortoimagens Multiespectral Quickbird 00 geradas pelos quatro softwares são
apresentadas no Apêndice E , Tabela E1.

68
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 81 CPs para as ortoimagens Multiespectral Quickbird 00 para os quatro
softwares são apresentadas no Apêndice E, na Tabela E2. Na Tabela E3 do Apêndice E,
são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 81 CPs para as ortoimagens Multiespectral Quickbird 00 geradas
pelos três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 18.
Tabela 18. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Multiespectral
Quickbird 00.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
0,18 0,92 0,79 1,19 1,49 1,91
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,63 1,39 0,45 1,20 0,53 1,00
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,07 0,15 0,05 0,13 0,06 0,11
RMSE RMSE RMSE RMSE RMSE RMSE
0,65 1,67 0,91 1,69 1,58 2,16
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 19.
Tabela 19. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelos aplicativos comerciais para a imagem Multiespectral Quickbird 00.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
Média Média Média Média Média Média
0,79 1,08 1,27 1,91 1,40 2,61
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,44 0,68 0,94 1,13 0,57 1,20
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,05 0,08 0,10 0,13 0,06 0,13
RMSE RMSE RMSE RMSE RMSE RMSE
0,90 1,28 1,58 2,22 1,51 2,88
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 20. Para a análise de precisão foram considerados: erro padrão aceitável de

69
3,6 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 2,5455 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 96,578. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,664.
Tabela 20. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Multiespectral Quickbird 00.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
4,877 23,823 2,487 17,728 3,414 12,351
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
2,546 5,951 15,845 8,939 25,481 17,218
.
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 21. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 21. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Multiespectral Quickbird 00.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
2,361 5,765 10,818 15,839 3,951 17,775
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
16,163 14,270 12,242 15,201 22,274 19,613

70
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Multiespectral Quickbird 00 ortorretificadas pelo K2ORTHO e
pelos softwares comerciais são apresentadas no Apêndice E, Figura E1.
4.2.2. IMAGEM MULTIESPECTRAL QUICKBIRD 01
Na segunda imagem multiespectral analisada, denominada de Multiespectral
Quickbird 01, foram obtidos 41 check points (CP) distribuídos homogeneamente sobre
toda a região da imagem. Estes 41 CP foram identificados nas quatro ortoimagens
geradas pelos quatro softwares, e posteriormente calculadas as diferenças planimétricas
em metros entre as coordenadas UTM associadas a estes CPs. As coordenadas UTM em
metros obtidas através dos 41 CPs para as ortoimagens Multiespectral Quickbird 01
geradas pelos quatro softwares são apresentadas no Apêndice F, Tabela F1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 41 CPs para as ortoimagens Multiespectral Quickbird 01 para os quatro
softwares são apresentadas no Apêndice F, na Tabela F2. Na Tabela F3 do Apêndice F,
são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 41 CPs para as ortoimagens Multiespectral Quickbird 01 geradas
pelos três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 22.
Tabela 22. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Multiespectral
Quickbird 01.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
1,52 0,12 2,33 0,82 3,75 0,43
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
1,48 0,52 1,63 0,53 2,37 0,71
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,23 0,08 0,26 0,08 0,37 0,11
RMSE RMSE RMSE RMSE RMSE RMSE
2,12 0,53 2,85 0,98 4,43 0,83
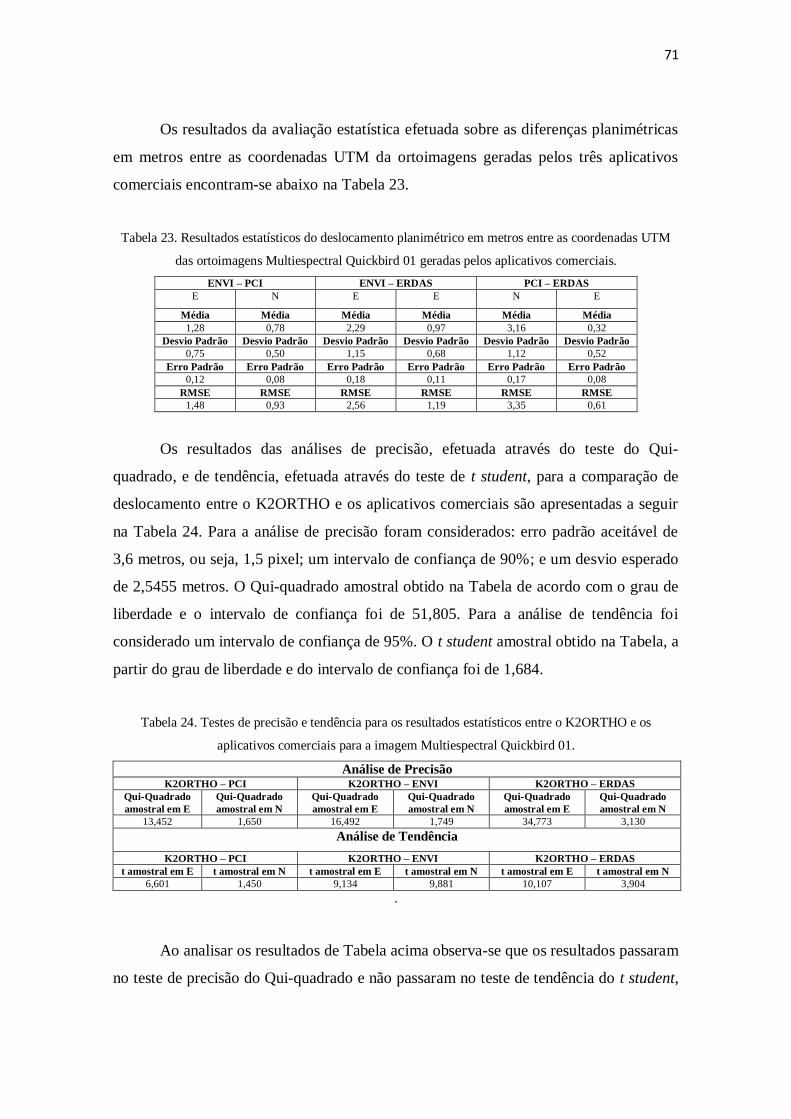
71
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 23.
Tabela 23. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
das ortoimagens Multiespectral Quickbird 01 geradas pelos aplicativos comerciais.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
1,28 0,78 2,29 0,97 3,16 0,32
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,75 0,50 1,15 0,68 1,12 0,52
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,12 0,08 0,18 0,11 0,17 0,08
RMSE RMSE RMSE RMSE RMSE RMSE
1,48 0,93 2,56 1,19 3,35 0,61
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 24. Para a análise de precisão foram considerados: erro padrão aceitável de
3,6 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 2,5455 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 51,805. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,684.
Tabela 24. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Multiespectral Quickbird 01.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
13,452 1,650 16,492 1,749 34,773 3,130
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
6,601 1,450 9,134 9,881 10,107 3,904
.
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
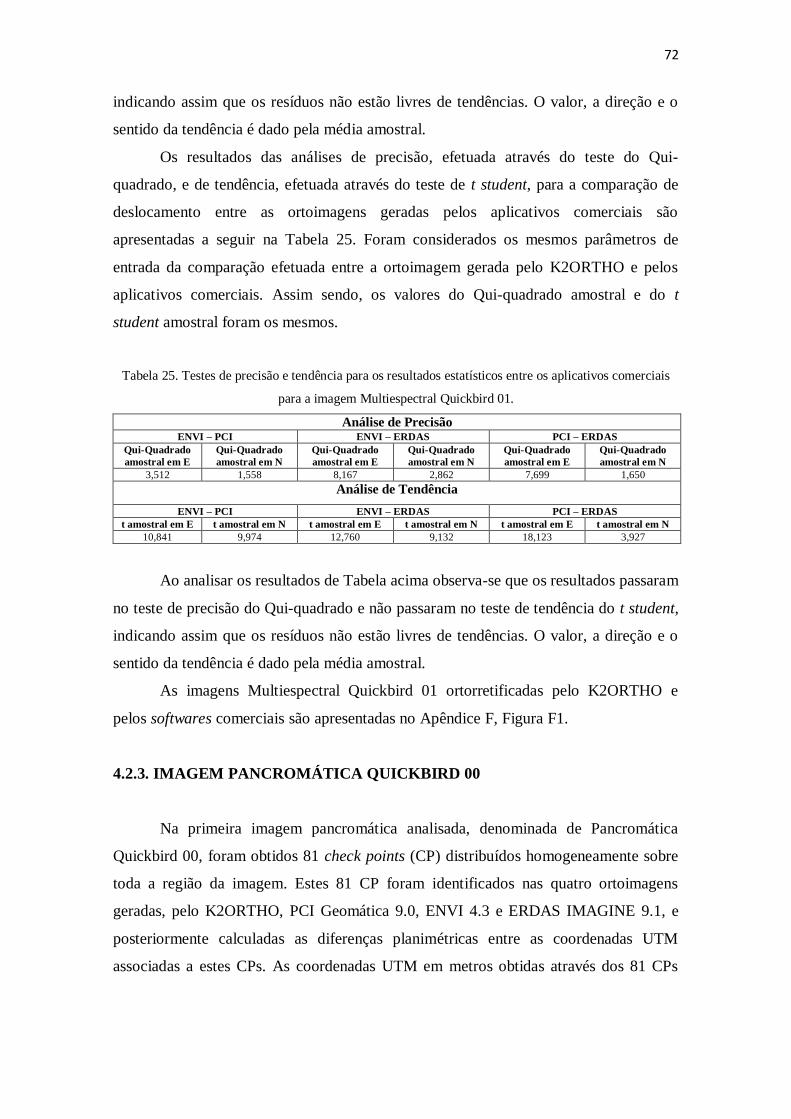
72
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 25. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 25. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Multiespectral Quickbird 01.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
3,512 1,558 8,167 2,862 7,699 1,650
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
10,841 9,974 12,760 9,132 18,123 3,927
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Multiespectral Quickbird 01 ortorretificadas pelo K2ORTHO e
pelos softwares comerciais são apresentadas no Apêndice F, Figura F1.
4.2.3. IMAGEM PANCROMÁTICA QUICKBIRD 00
Na primeira imagem pancromática analisada, denominada de Pancromática
Quickbird 00, foram obtidos 81 check points (CP) distribuídos homogeneamente sobre
toda a região da imagem. Estes 81 CP foram identificados nas quatro ortoimagens
geradas, pelo K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e ERDAS IMAGINE 9.1, e
posteriormente calculadas as diferenças planimétricas entre as coordenadas UTM
associadas a estes CPs. As coordenadas UTM em metros obtidas através dos 81 CPs

73
para as ortoimagens Pancromática Quickbird 00 geradas pelos quatro softwares são
apresentadas no Apêndice G, Tabela G1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 81 CPs para as ortoimagens Pancromática Quickbird 00 para os quatro
softwares são apresentadas no Apêndice G, na Tabela G2. Na Tabela G3 do Apêndice
G, são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 81 CPs para as ortoimagens Pancromática Quickbird 00 geradas
pelos três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 26.
Tabela 26. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Pancromática
Quickbird 00.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
0,08 0,91 0,21 0,81 1,03 1,82
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,21 0,59 0,13 0,95 0,22 0,62
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,02 0,07 0,01 0,11 0,02 0,07
RMSE RMSE RMSE RMSE RMSE RMSE
0,22 1,09 0,24 1,25 1,05 1,92
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 27.
Tabela 27. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelos aplicativos comerciais para a imagem Pancromática Quickbird 00.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
0,23 0,91 1,00 1,90 0,94 2,64
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,17 0,51 0,25 0,71 0,23 0,35
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,02 0,06 0,03 0,08 0,03 0,04
RMSE RMSE RMSE RMSE RMSE RMSE
0,28 1,04 1,04 2,03 0,97 2,66
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de

74
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 28. Para a análise de precisão foram considerados: erro padrão aceitável de
0,9 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 0,6363 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 96,578. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,664.
Tabela 28. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Pancromática Quickbird 00.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
3,004 24,722 1,159 64,239 3,432 27,055
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
3,568 13,907 14,685 7,642 42,043 26,521
Ao analisar os resultados da Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 29. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 29. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Pancromática Quickbird 00.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
1,996 18,179 4,410 35,384 3,707 8,470
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
12,224 16,176 36,311 24,295 37,242 68,814

75
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Pancromática Quickbird 00 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais são apresentadas no Apêndice G, Figura G1.
4.2.4. IMAGEM PANCROMÁTICA QUICKBIRD 01
Na segunda imagem pancromática analisada, denominada de Pancromática
Quickbird 01, foram obtidos 41 check points (CP) distribuídos homogeneamente sobre
toda a região da imagem. Estes 41 CP foram identificados nas quatro ortoimagens
geradas pelos quatro softwares, e posteriormente calculadas as diferenças planimétricas
em metros entre as coordenadas UTM associadas a estes CPs. As coordenadas UTM em
metros obtidas através dos 41 CPs para as ortoimagens Pancromática Quickbird 01
geradas pelos quatro softwares são apresentadas no Apêndice H, Tabela H1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 41 CPs para as ortoimagens Pancromática Quickbird 01 para os quatro
softwares são apresentadas no Apêndice H, na Tabela H2. Na Tabela H3 do Apêndice
H, são apresentadas as diferenças planimétricas em metros obtidas entre as coordenadas
UTM extraídas dos 41 CPs para as ortoimagens Pancromática Quickbird 01 geradas
pelos três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros três aplicativos comerciais encontram-se abaixo na Tabela 30.

76
Tabela 30. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem Pancromática
Quickbird 01.
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
Média Média Média Média Média Média
1,05 0,50 0,74 0,39 1,82 0,79
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,51 0,29 0,57 0,28 0,52 0,31
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,08 0,05 0,09 0,04 0,08 0,05
RMSE RMSE RMSE RMSE RMSE RMSE
1,17 0,58 0,94 0,48 1,90 0,84
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos três aplicativos
comerciais encontram-se abaixo na Tabela 31.
Tabela 31. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
das ortoimagens Pancromática Quickbird 01 geradas pelos aplicativos comerciais.
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E E N E
Média Média Média Média Média Média
0,93 0,44 1,98 0,72 2,85 0,32
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
0,48 0,28 0,56 0,32 0,28 0,19
Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,08 0,04 0,09 0,05 0,04 0,03
RMSE RMSE RMSE RMSE RMSE RMSE
1,05 0,52 2,06 0,79 2,86 0,37
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 32. Para a análise de precisão foram considerados: erro padrão aceitável de
0,9 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 0,6363 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 51,805. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,684.
Tabela 32. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem Pancromática Quickbird 01.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N

77
9,229 3,061 11,694 2,764 9,650 3,374
Análise de Tendência
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
13,243 10,858 8,265 8,929 22,411 16,323
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 33. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 33. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem Pancromática Quickbird 01.
Análise de Precisão ENVI – PCI ENVI – ERDAS PCI – ERDAS
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
8,317 2,709 11,114 3,645 2,852 1,219
Análise de Tendência
ENVI – PCI ENVI – ERDAS PCI – ERDAS
t amostral em E t amostral em N t amostral em E t amostral em N t amostral em E t amostral em N
12,287 10,309 22,651 14,379 64,387 10,983
Ao analisar os resultados de Tabela acima observa-se que os resultados passaram
no teste de precisão do Qui-quadrado e não passaram no teste de tendência do t student,
indicando assim que os resíduos não estão livres de tendências. O valor, a direção e o
sentido da tendência é dado pela média amostral.
As imagens Pancromática Quickbird 01 ortorretificadas pelo K2ORTHO e pelos
softwares comerciais são apresentadas no Apêndice H, Figura H1.
4.3. IMAGEM HRC/CBERS 2B
Na imagem HRC/CBERS 2B analisada, denominada de HRC 00, foram obtidos
81 check points (CP) distribuídos homogeneamente sobre toda a região da imagem.

78
Estes 81 CP foram identificados nas três ortoimagens geradas, pelo K2ORTHO, PCI
Geomática 9.0 e ENVI 4.3. A geração da ortoimagem no aplicativo ERDAS IMAGINE
9.1 não foi possível por motivos de incompatibilidade. Posteriormente foram calculadas
as diferenças planimétricas entre as coordenadas UTM associadas a estes CPs. As
coordenadas UTM em metros obtidas através dos 81 CPs para as ortoimagens HRC 00
geradas pelos três softwares são apresentadas no Apêndice I, Tabela I1.
As diferenças planimétricas em metros obtidas entre as coordenadas UTM
extraídas dos 81 CPs para as ortoimagens HRC/CBERS 2B para os quatro softwares são
apresentadas no Apêndice I, na Tabela I2. Na Tabela I3 do Apêndice I, são apresentadas
as diferenças planimétricas em metros obtidas entre as coordenadas UTM extraídas dos
81 CPs para as ortoimagens HRC/CBERS 2B geradas pelos três softwares comerciais.
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagem gerada pelo K2ORTHO e as
geradas pelos outros dois aplicativos comerciais encontram-se abaixo na Tabela 34.
Tabela 34. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelo K2ORTHO em comparação com os aplicativos comerciais para a imagem HRC 00.
K2ORTHO – PCI K2ORTHO – ENVI
E N E N
Média Média Média Média
0,46 0,93 1,55 2,38
Desvio Padrão Desvio Padrão Desvio Padrão Desvio Padrão
1,42 3,23 1,40 4,69
Erro Padrão Erro Padrão Erro Padrão Erro Padrão
0,16 0,36 0,16 0,52
RMSE RMSE RMSE RMSE
1,50 3,36 2,09 5,26
Os resultados da avaliação estatística efetuada sobre as diferenças planimétricas
em metros entre as coordenadas UTM da ortoimagens geradas pelos dois aplicativos
comerciais encontram-se abaixo na Tabela 35.
Tabela 35. Resultados estatísticos do deslocamento planimétrico em metros entre as coordenadas UTM
geradas pelos aplicativos comerciais para a imagem HRC 00.
ENVI – PCI
E N
Média Média
1,40 1,73
Desvio Padrão Desvio Padrão
0,83 3,75
Erro Padrão Erro Padrão
0,09 0,42
RMSE RMSE
1,63 4,13
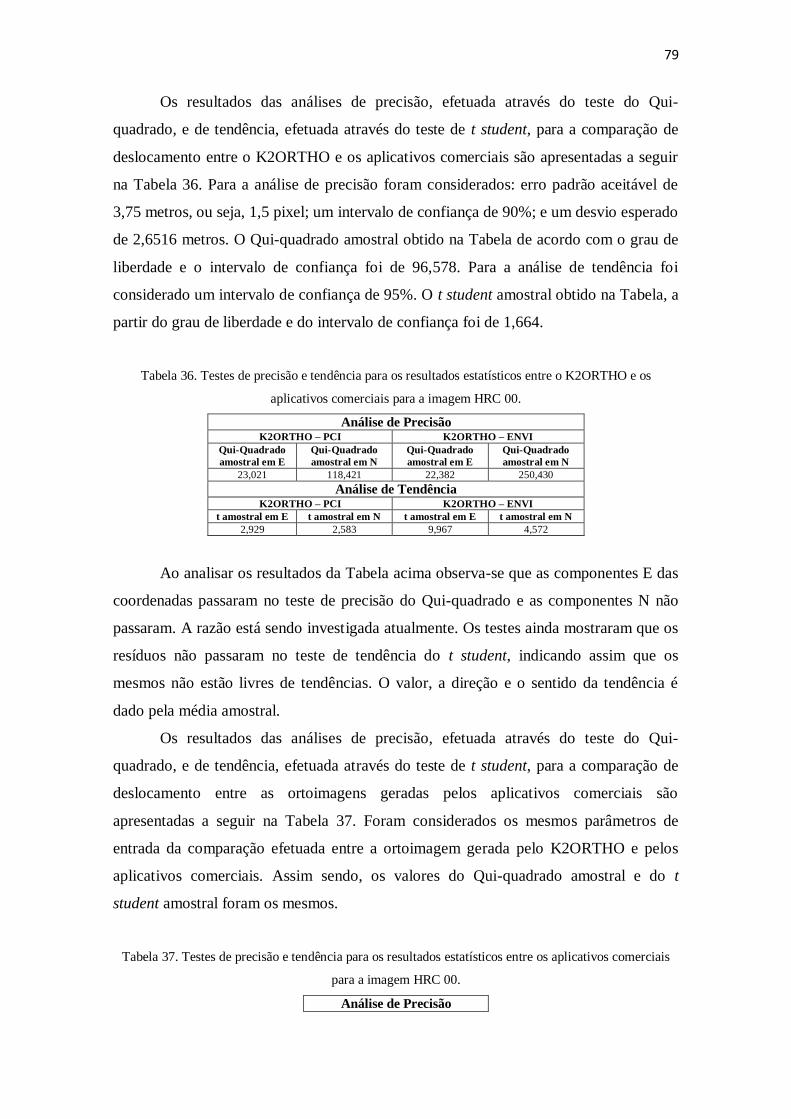
79
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre o K2ORTHO e os aplicativos comerciais são apresentadas a seguir
na Tabela 36. Para a análise de precisão foram considerados: erro padrão aceitável de
3,75 metros, ou seja, 1,5 pixel; um intervalo de confiança de 90%; e um desvio esperado
de 2,6516 metros. O Qui-quadrado amostral obtido na Tabela de acordo com o grau de
liberdade e o intervalo de confiança foi de 96,578. Para a análise de tendência foi
considerado um intervalo de confiança de 95%. O t student amostral obtido na Tabela, a
partir do grau de liberdade e do intervalo de confiança foi de 1,664.
Tabela 36. Testes de precisão e tendência para os resultados estatísticos entre o K2ORTHO e os
aplicativos comerciais para a imagem HRC 00.
Análise de Precisão K2ORTHO – PCI K2ORTHO – ENVI
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
23,021 118,421 22,382 250,430
Análise de Tendência K2ORTHO – PCI K2ORTHO – ENVI
t amostral em E t amostral em N t amostral em E t amostral em N
2,929 2,583 9,967 4,572
Ao analisar os resultados da Tabela acima observa-se que as componentes E das
coordenadas passaram no teste de precisão do Qui-quadrado e as componentes N não
passaram. A razão está sendo investigada atualmente. Os testes ainda mostraram que os
resíduos não passaram no teste de tendência do t student, indicando assim que os
mesmos não estão livres de tendências. O valor, a direção e o sentido da tendência é
dado pela média amostral.
Os resultados das análises de precisão, efetuada através do teste do Qui-
quadrado, e de tendência, efetuada através do teste de t student, para a comparação de
deslocamento entre as ortoimagens geradas pelos aplicativos comerciais são
apresentadas a seguir na Tabela 37. Foram considerados os mesmos parâmetros de
entrada da comparação efetuada entre a ortoimagem gerada pelo K2ORTHO e pelos
aplicativos comerciais. Assim sendo, os valores do Qui-quadrado amostral e do t
student amostral foram os mesmos.
Tabela 37. Testes de precisão e tendência para os resultados estatísticos entre os aplicativos comerciais
para a imagem HRC 00.
Análise de Precisão

80
ENVI – PCI
Qui-Quadrado
amostral em E
Qui-Quadrado
amostral em N
7,766 159,843
Análise de Tendência ENVI – PCI
t amostral em E t amostral em N
15,288 4,143
Ao analisar os resultados de Tabela acima observa-se que a componente E das
coordenadas passou no teste de precisão do Qui-quadrado e a componentes N não
passou. A razão está sendo investigada atualmente. Os testes ainda mostraram que os
resíduos não passaram no teste de tendência do t student, indicando assim que os
mesmos não estão livres de tendências. O valor, a direção e o sentido da tendência é
dado pela média amostral.
As imagens HRC 00 ortorretificadas pelo K2ORTHO e pelos softwares
comerciais são apresentadas no Apêndice I, Figura I1.

81
5. CONCLUSÕES E RECOMENDAÇÕES
A partir dos resultados obtidos após a avaliação estatística dos dados, as
seguintes conclusões podem ser apresentadas:
A construção do Modelo de Funções Racionais, em seu 1º método, foi efetuada
com sucesso e encontra-se potencialmente implementável no SPRING;
Os resultados apresentaram-se válidos para a atual fase de desenvolvimento,
uma vez que as diferenças em relação às ortoimagens geradas pelos softwares
utilizados como referência apresentaram-se na mesma ordem de grandeza que
estes softwares diferem entre si;
Os resultados ficaram mais próximos dos resultados obtidos através dos
aplicativos ENVI 4.3 e ERDAS IMAGINE 9.1;
As imagens com maior resolução espacial são mais frágeis ao processo,
apresentando algumas vezes deslocamentos levemente maiores do que as demais
imagens com resolução espacial menor;
O tempo de execução do processo de ortorretificação pela rotina K2ORTHO
ainda é maior em comparação com os demais aplicativos;
O processo de mapeamento inverso, no tange à construção do raster vazio é
efetuado por um processo heurístico, o que torna difícil a sua construção;
A implementação da rotina no SPRING estará livre de complicações, tendo em
vista a complexidade relativamente baixa apresentada pelo processo.
Ao analisar que atualmente há uma inexistência de aplicativos livres que
disponham da ferramenta de correção geométrica 3D por modelos físicos e pelo modelo
RFM, e analisando também a ausência desta rotina no SPRING, este trabalho apresenta
o desenvolvimento preliminar da mesma para uma futura implementação no SPRING.
Isto possibilitará que os usuários desenvolvam projetos nos quais demandem uma
necessidade de maior exatidão geométrica nas imagens. Isto representará também uma
metodologia bastante econômica, tendo em vista que os arquivos RPC são
disponibilizados juntamente com as imagens sem custo adicional e o usuário poderá
ortorretificar as imagens sem ter necessidade de adquirir aplicativos comerciais para

82
realização de tal processo. Desta forma, a comunidade acadêmica que usa o SPRING
terá disponível uma rotina que irá melhorar a qualidade dos resultados de trabalho
científicos que utilizam o Sensoriamento Remoto, bem como também impactos nas
instituições privadas que utilizam o software livre nos processamentos de imagens de
Sensoriamento Remoto.
A rotina ainda está em fase preliminar, no que, alguns possíveis procedimentos
ainda não estão disponíveis. A única extensão de entrada e saída da rotina é a .tiff; não
há disponibilidade de alteração de altitude geométrica para ortométrica e vice-versa para
o MDE; o processo ainda é um pouco demorado em comparação aos demais aplicativos;
os formatos de arquivo RPC deverão ser formatados de acordo com os modelos
disponibilizados pela Space Imaging ou Digital Globe ou ainda o da Jaxa; a rotina
ainda não dispõe de uma interface de operação.
Os demais métodos relativos ao modelo RFM, ainda não estão disponíveis. O 2º
método (dependente do terreno) encontra-se em fase de construção, devido à sua alta
complexidade, e o 3º método (refinamento da solução independente do terreno) já está
construído e atualmente em fase de testes.
Recomenda-se que outros modelos sejam também implementados e testados
para a ortorretificação no SPRING a fim de que o usuário possa escolher o modelo mais
adequado à sua necessidade.

83
6. REFERÊNCIAS BIBLIOGRÁFICAS
Andrade, J.B. Fotogrametria. Curitiba, 258p. 1998.
Baltsavias, E.; Pateraki, M.; Zhang, L. Radiometric and geometric evaluation of
IKONOS Geo Images and their use for 3D building modelling. Proc. Joint ISPRS
Workshop “High Resolution Mapping From Space 2001”. Hannover, Germany, 79-
21 September 2001.
Baltsavias, E., Zhang, L., Eisenbeiss, H., 2005. DSM generation and interior orientation
determination of IKONOS images using a testfield in Switzerland. International
Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36
(Part I/W3), 9 pages (on CD-ROM).
Brito, J. L. N. S. Instituto Militar de Engenharia. Estágio da Fotogrametria Digital
para Engenheiros Cartógrafos, Rio de Janeiro – RJ, 1999.
Büyüksalih, G.; Murat, O.; Karsten, J. Precise georeferencing of rectified high
resolution space images. In: International Society for Photogrammetry and Remote
Sensing Congress, 20, 2004, Istambul. Proceedings… Istanbul: ISPRS, 2004. v. 35, p.
184-188.
Câmara, G.; Davis, C.; Monteiro, A. M. V. Introdução à Ciência da Geoinformação.
São José dos Campos: Inpe, 2001. 345 p. Disponível em: <http://mtc-
m12.sid.inpe.br/col/sid.inpe.br/sergio/2004/04.22.07.43/doc/publicacao.pdf >. Acesso
em: 10 nov. 2008.
Centre National d.Études Spatiales (CNES), 1980, Le mouvement du véhicule spatial en
orbite, (Toulouse, France: CNES), 1031 páginas.
Cerqueira, Jorge Dirceu Melo de, Ortorretificação digital de imagens de satélite de
alta resoução espacial. 77p. Dissertação (Mestrado em Ciências Geodésicas e
Tecnologias da Geoinformação) – Universidade Federal de Pernambuco, Recife. 2004.

84
Crósta, A. P. Processamento Digital de Imagens de Sensoriamento Remoto,
IG/UNICAMP, Campinas, 1992.
D’alge, J. C. L. Atualização Cartográfica por Imagens de Satélite: notas de aula
dadas no Instituto Nacional de Pesquisas Espaciais. São José dos Campos, 1999. 18 p
Di, K, Ma, R, et al Li, R. X, Rational functions and potencial for rigorous sensor model
recovery, Photogrammetric Engineering and Remote Sensing, v. 69, n.1, p. 33 - 41,
jan 2003.
Dial, G., Grodecki, J., 2002. IKONOS accuracy without ground control. International
Archives of Photogrammetry and Remote Sensing, v. 34, n. 1, 6 p., 2002.
Dowman, I.; Tao V. An Update on the Use of Rational Functions for Photogrammetric
Restitution. ISPRS Highlights, p. 22-29, 2002.
Escobal, P.R., 1965, Methods of orbit determination, (Malabar, USA: Krieger
Publishing Company), 479 p.
Falkner, e., Morgan, D. Aerial Mapping methods and applications. 2 ed Boca Raton
Lewis, 2002.
Felgueiras, C. A. A tecnologia SPRING, breve histórico, status atual e evolução. In: 1 º
Simpósio de Geotecnologias do Pantanal, 1, 2006, Campo Grande, Anais do 1º
Simpósio de Geotecnologias do Pantanal, Nov. 2006. v.1, p. 811-824.
Fraser, C.S., Dial, G., Grodecki, J., Sensor orientation via RPCs. ISPRS Journal of
Photogrammetry & Remote Sensing, v. 60 (2006), p. 182–194.
Fraser, C.S., Hanley, H.B., 2003. Bias compensation in rational functions for IKONOS
satellite imagery. Photogrammetric Engineering and Remote Sensing, n. 69 v. 1, p.
53–57.

85
Fraser, C.S., Hanley, H.B., 2005. Bias compensated RPCs for sensor orientation of
high-resolution satellite imagery. Photogrammetric Engineering and Remote
Sensing, v. 71, n. 8, p. 909–915.
Fraser, C. S.: Hanley H. B.; Yamakawa, T. Sub-Metre Geopositioning With Ikonos Geo
Imagery. ISPRS joint Workshop “High Resolution Mapping From Space 2001”,
Hanover, Germany, p. 19-21, September 2001.
Friedmann, D.E., Friedel, J.P., Magnusses, K.L., Kwok K., and Richardson, S., 1983,
Multiple Scene Precision Rectification of Spaceborne Imagery with Few Control Points,
Photogrammetric Engineering and Remote Sensing, 49, p. 1657-1667.
Galo, M.; Camargo, P.O. Utilização do GPS no controle da qualidade de carta. In:
Congresso Brasileiro de Cadastro Técnico Multifinalitário. Florianópolis, 1994, páginas
41-48.
Giannone, F.,A rigorous model for High Resolution Satellite Imagery Orientation /
Francesca Giannone. – Roma, 2006, 175 f.: il. Dissertação (Phd) – University of Rome
“La Sapienza” - Faculty of Engineering.
Gonzales, R. C.; Woods, R. E. Processamento de Imagens Digitais, EditoraEdgard
Blucher Ltda, 2000, 509p.
Grodecki, J. 2001. Ikonos stereo feature extraction - RPC approach. Proc. ASPRS
Annual Conference, St. Louis, 23-27 April 2001, 7 p.
Grodecki, J. and G. Dial, 2003. Block adjustment of high resolution satellite images
described by rational polynomials. Photogrammetric Engineering and Remote
Sensing, v. 69, n. 1, pp. 59-68.
Huinca, S.C.M.; Araki, H.; Cavalheiro, A. C. Correção geométrica de imagens
Quickbird para áreas urbanas utilizando modelos geométricos generalizados e dados de
laser scanning. In: Simpósio Brasileiro de Sensoriamento Remoto, 12, 2005, Goiânia.
Anais... São José dos Campos: INPE, abr. 2005. v. 12, p. 4545-4551.

86
Gugan, D. J. Pratical Aspects of Topographic Mapping from SPOT Imagery.
Photogrammetric Record, v. 12, n. 69, p. 349-355, 1987.
Gugan, D. J.; Dowman, I. J. Accuracy and completeness of topographic mapping from
SPOT imagery. Photogrammetric Record, v. 12, n. 72, p. 787–796, 1988.
Hanley, H. B.; Fraser, C. S. Geopositioning accuracy of Ikonos imagery: indications
from 2D transformations. Photogrammetric Record, v. 17, n. 98, p. 317-329, 2001.
Hanley, H. B., Yamakawa, T., Fraser, C.S., 2002. Sensor orientation for high-resolution
satellite imagery. International Archives of Photogrammetry and Remote Sensing,
v. 34 (Part 1), p. 69–75.
Hu, Y., Tao, V., Croitoru, A., 2004. Understanding the rational function model:
methods and applications, International Archives of Photogrammetry and Remote
Sensing, 12-23 July, Istanbul, vol. XX, 6 p.
Jacobsen, K. Orientation of High Resolution Optical Space Images. In: The ASPRS
Annual Conference 2007: Identifying Geospatial Solutions, Tampa, Florida.
Proceddings…,Tampa, 2007.
Kardoulas, N. G.; Bird, A. C. e Lawan, A. I. Geometric correction of SPOT and Landsat
imagery: a comparison of map- and GPS-derived control points . Photogrammetric
Engineering & Remote Sensing, v. 62, n. 10, p. 1173-1177, oct. 1996.
Kim, T.; Dowman, I. Comparison of two physical sensor models for satellite images:
Position-Rotation model and Orbit-Attitude model. The Photogrammetric Record, v.
21, n. 114, p. 110–123, 2006.
Kratky, V. Rigorous photogrammetric Proessing of SPOT Images at CCM Canada.
ISPRS Journal of Photogrametry and Remote Sensing, p. 53-71, n. 44, 1989.
Light, D.L., Brown, D., Colvocoresses, A., Doyle, F., Davies, M., Ellasal, A., Junkins,

87
J., Manent, J., McKenney, A., Undrejka, R., and Wood, G., 1980, Satellite
Photogrammetry, Manual of Photogrammetry 4th Edition, Chapitre XVII, Editor in
chief: C.C. Slama, ASP Publishers, Falls Church, USA, pp. 883-977.
Mikhail, E. M.; Bethel, J. S.; Mcglone, J. C. Introduction to Modern
Photogrammetry. New York: John Wiley & Sons, 2001. 479p
Mendonça, M. Ortorretificação de imagens. Disponível em:<
http://www.cartografica.ufpr.br/docs/foto3/ortorretificacao.pdf>. Acesso em: 21 de
janeiro 2009.
Mitishita, Edson A.; Saraiva, C. Claudia. Modelos Matemáticos para Fins de
Monorestituição de Imagens de Alta Resolução Ikonos 2 - GEO. Simposio
Brasileiro de Geomatica – Anais do Simposio, CD-Rom, UESP – Presidente Prudente, 9
–13 de julho de 2002.
National Imaging and Mapping Agency (NIMA), 2000. The Compendium of
Controlled Extensions for the National Imagery Transmission Format (NITF),
2000. Disponível em: <http://164.214.2.51/ntb/baseline/stdi0002/final.pdf.> Acesso em:
22 jan 2009.
Novak, K. Analytical Photogrammetry. Departament of Geodetic Science and
Surveying. Ohio State University, Columbus, OH. 1992.
OpenGIS Consortium (OGC), 1999. The OpenGIS Abstract Specification - Topic 7:
Earth Imagery. Disponível em: <http://www.opengis.org/docs/99-107.pdf.> Acesso
em: 22 jan 2009.
Orun, A. B.; Natarajan, K. A Modified Bundle Adjustment Software for SPOT Imagery
and Photography: Tradeoff. Photogrammetric Engineering and Remote Sensing, p.
1431-1437, 1994.
Pinheiro, E, S, Avaliação de imagens Quickbird na análise geográfica de um setor da
mata atlântica do Rio Grande do Sul, São José dos Campos, 46 p, (INPE – 10094 –

88
TDI/891), Dissertação (Sensoriamento Remoto) – Instituto Nacional de Pesquisas
Espaciais, 2003.
Poli, D. Georreferencing of Multi-line CCD array optical sensors with a general
photogrammetric model. IGARSS 03, Toulouse, France, 2003.
Poli, D. Orientation of Satellite and Airborne Imagery from Multi-Line Pushbroom
Sensors with a Rigorous Sensor Model. In: ISPRS Congress, 20., 2004, Istanbul,
Turkey. Geoimagery bridging continents, Istanbul: ISPRS, 2004. p. 130-136.
Sadeghian, S.; DELAVAR, M. R. An investigation of geometric correction and
uncertainty assessment of high resolution images. In: Second International
Symposium on Spatial Data Quality, 2003, Hong Kong. Proceedings…, Hong Kong,
2003. p. 89-99.
Schowengerdt, R. A. Techniques for Image Processing and Classification in Remote
Sensing. Academic Press, Orlando, 1983. 249p.
Schowengerdt, R. A. Remote sensing: models and methods for image processing.
Academic Press, 2ª edição, San Diego, USA, 1997.
Schowengerdt, R. A. Remote sensing: models and methods for image processing.
Academic Press, 3ª edição, San Diego, USA, 2007.
Silva, A. J. F. M. O uso de polinômios racionais na ortorretificação de imagens de
satélite. In: Simpósio Brasileiro de Sensoriamento Remoto, 13, 2007, Florianópolis.
Anais... São José dos Campos: INPE, abr. 2007. v. 13, p. 1289-1295.
Sohn, H., Park, C., Yu, H., Application of rational function model to satellite images
with the correlation analysis. KSCE Journal of Civil Engineering, vol. 7, No. 5, pp. 585-
593.

89
Tao, V, Y, Hu, A comprehensive study of the rational function model. Photogrammetric
processing, Photogrammetric Engineering and Remote Sensing, v. 67, n. 12, p. 1347
– 1357, Dec 2001.
Tao, C. V.; Hu, Y. 3D Reconstruction methods based on the rational function model.
Photogrammetric Engineering and Remote Sensing, v. 68, n. 7, p. 705-714, 2002.
Tao, C.; Mercer, J.; Schnick, S.; Zhang, Y. Image rectification using a generic sensor
model – Rational Function Model. International Archives of Photogrammetry and
Remote Sensing, v. 33, Part B3. Amsterdam 2000.
TerraLib. TerraLib Documentation. Disponível: http://www.terralib.org/html/v331/.
Acesso em: 09/06/2009.
Tonolo, g. F.; Poli, D. Georeferencing of EROS-A1 high resolution images with
rigorous and rational function model. In: ISPRS, 2003, Hannover. Workshop "High
resolution mapping from space", Hannover: ISPRS, 2003.
Toutin, T., 1985. Analyse Mathematique des Possibilites Cartographiquesdu Systeme
SPOT, Doctoral Thesis, Escole National des Sciences Geographiques, Paris, 163 p.
Toutin, T. Geometric processing of Remote Sensing images: models, algorithms and
methods, International Journal of Remote Sensing, 24, 2004.
Toutin, T., P. Cheng, 2000. Demystification of Ikonos,Earth Observation Magazine
(EOM), v. 9, n.7, p. 17 – 21, 2000.
Valadan, M. J.; Petrie, G. Mathematical modeling and accuracy testing of SPOT level
1B stereopairs. Photogrammetric Record, v. 16, n. 91, p. 67-82, apr 1998.
Valadan, Z. M. J. Sadeghian, S. “Orbital Parameter Modeling and Accuracy Testing of
IKONOS Geo Image”, Photogrammetric Journal of Finland, v. 18, n. 2, p. 70 – 80,
2003.

90
Valadan, Z. M. J.; Sadeghian, S. Rigorous and Non-Rigorous Photogrammetric
Processing of Ikonos Geo Image. In: ISPRS, 2003, Hannover. High Resolution
Mapping from Space, Hannover: ISPRS, 2003.
Volotão, C. F. S. Geração de Ortoimagens para Aplicações Urbanas: Desenvolvimento
das Equações e Protótipo Experimental. Dissertação de mestrado (Mestrado em
Sensoriamento Remoto) – Instituto Nacional de Pesquisas Espaciais – INPE, São josé
dos Campos, 2001.
Wiesel, J., 1985. Digital image processing for orthophoto generation.
Photogrammetria, 40: 69-76.
Xu, Z., 2004. The Rational Function Model in Photogrammetric Mapping:
Methods and Accuracies [Master Thesis], Department of Earth Science, York
University, 64 p.
Yamakawa, T., Fraser, C. S. The affine projection model for sensor orientation:
experiences with high-resolution satellite imagery. International Archives of
Photogrammetry and Remote Sensing. v. 35 parte 1, Istambul, Turquia, 2004 p.142-
147.

91
APÊNDICE A
IMAGEM MULTIESPECTRAL IKONOS 00
Tabela A1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens Multiespectral
Ikonos 00.
Imagem Multiespectral Ikonos 00
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 661132,83 7466463,20 661132,00 7466464,00 661134,67 7466465,28 661135,00 7466463,00
2 660988,83 7464919,20 660988,00 7464916,00 660990,72 7464917,89 660991,00 7464919,00
3 660840,83 7463703,20 660840,00 7463704,00 660838,77 7463702,37 660843,00 7463703,00
4 661012,83 7462467,20 661012,00 7462464,00 661010,71 7462466,86 661015,00 7462467,00
5 661224,83 7461407,20 661224,00 7461404,00 661226,64 7461407,28 661227,00 7461407,00
6 661520,83 7460235,20 661520,00 7460232,00 661518,54 7460231,75 661523,00 7460231,00
7 661188,83 7459095,20 661188,00 7459092,00 661190,65 7459092,20 661191,00 7459095,00
8 660880,83 7458143,20 660880,00 7458140,00 660878,75 7458140,58 660883,00 7458139,00
9 661124,83 7457303,20 661124,00 7457300,00 661126,67 7457304,91 661127,00 7457303,00
10 660936,83 7456671,20 660936,00 7456668,00 660934,73 7456669,16 660939,00 7456671,00
11 663048,83 7466563,20 663048,00 7466564,00 663050,04 7466565,24 663051,00 7466563,00
12 662647,83 7464747,20 662648,00 7464748,00 662650,17 7464749,96 662651,00 7464747,00
13 662800,83 7464267,20 662800,00 7464268,00 662802,12 7464270,15 662803,00 7464267,00
14 662172,83 7462155,20 662172,00 7462152,00 662174,32 7462154,99 662175,00 7462155,00
15 662368,83 7461875,20 662368,00 7461872,00 662370,26 7461875,10 662371,00 7461875,00
16 663232,83 7460067,20 663232,00 7460064,00 663233,97 7460063,82 663235,00 7460067,00
17 662332,83 7458983,20 662332,00 7458980,00 662334,27 7458984,24 662335,00 7458983,00
18 662824,83 7457903,20 662824,00 7457900,00 662826,11 7457900,67 662827,00 7457903,00
19 662492,83 7457027,20 662492,00 7457024,00 662494,22 7457025,02 662495,00 7457027,00
20 662416,83 7456715,20 662416,00 7456712,00 662418,24 7456713,14 662419,00 7456715,00
21 664800,83 7465663,20 664800,00 7465664,00 664801,46 7465665,60 664803,00 7465663,00
22 665096,83 7464515,20 665096,00 7464512,00 665097,36 7464514,05 665099,00 7464515,00
23 664260,83 7463351,20 664260,00 7463348,00 664261,64 7463350,51 664263,00 7463351,00
24 664208,83 7462311,20 664208,00 7462308,00 664209,65 7462310,93 664211,00 7462311,00
25 664556,83 7461767,20 664556,00 7461764,00 664557,54 7461767,14 664559,00 7461767,00
26 664428,83 7460323,20 664428,00 7460320,00 664429,58 7460323,71 664431,00 7460323,00
27 664500,83 7458267,20 664500,00 7458264,00 664501,56 7458268,53 664503,00 7458267,00
28 664484,83 7457523,20 664484,00 7457520,00 664485,56 7457524,82 664487,00 7457523,00
29 664368,83 7456595,20 664368,00 7456592,00 664369,60 7456593,19 664371,00 7456595,00
30 664252,83 7465879,20 664252,00 7465880,00 664253,64 7465881,51 664255,00 7465879,00
31 665904,83 7466623,20 665904,00 7466624,00 665901,09 7466625,22 665907,00 7466623,00
32 666368,83 7464959,20 666368,00 7464956,00 666368,94 7464957,88 666371,00 7464959,00
33 666252,83 7463639,20 666252,00 7463636,00 666252,98 7463638,40 666255,00 7463639,00
34 665936,83 7462507,20 665932,00 7462508,00 665933,08 7462506,85 665935,00 7462507,00
35 666120,83 7461123,20 666120,00 7461120,00 666121,02 7461123,40 666123,00 7461123,00
36 665916,83 7460107,20 665912,00 7460104,00 665917,09 7460107,80 665919,00 7460107,00
37 665452,83 7458747,20 665452,00 7458744,00 665453,24 7458748,34 665455,00 7458747,00
38 665640,83 7457455,20 665640,00 7457452,00 665641,18 7457452,85 665643,00 7457455,00
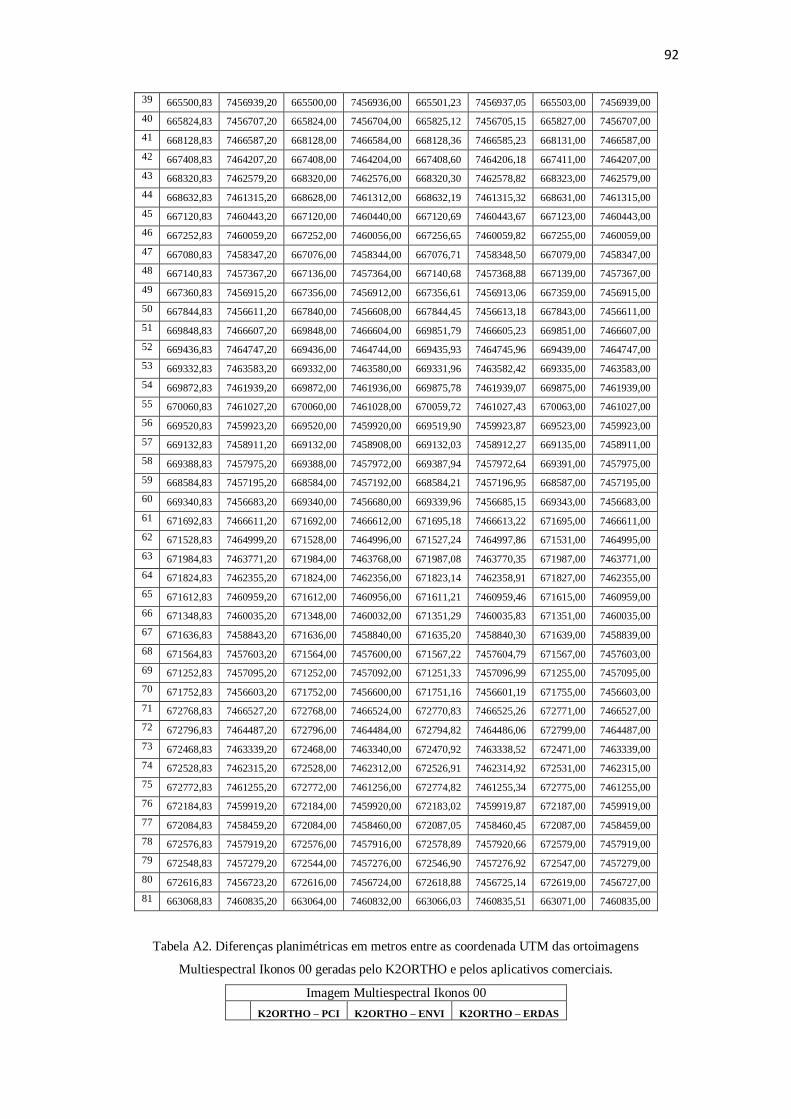
92
39 665500,83 7456939,20 665500,00 7456936,00 665501,23 7456937,05 665503,00 7456939,00
40 665824,83 7456707,20 665824,00 7456704,00 665825,12 7456705,15 665827,00 7456707,00
41 668128,83 7466587,20 668128,00 7466584,00 668128,36 7466585,23 668131,00 7466587,00
42 667408,83 7464207,20 667408,00 7464204,00 667408,60 7464206,18 667411,00 7464207,00
43 668320,83 7462579,20 668320,00 7462576,00 668320,30 7462578,82 668323,00 7462579,00
44 668632,83 7461315,20 668628,00 7461312,00 668632,19 7461315,32 668631,00 7461315,00
45 667120,83 7460443,20 667120,00 7460440,00 667120,69 7460443,67 667123,00 7460443,00
46 667252,83 7460059,20 667252,00 7460056,00 667256,65 7460059,82 667255,00 7460059,00
47 667080,83 7458347,20 667076,00 7458344,00 667076,71 7458348,50 667079,00 7458347,00
48 667140,83 7457367,20 667136,00 7457364,00 667140,68 7457368,88 667139,00 7457367,00
49 667360,83 7456915,20 667356,00 7456912,00 667356,61 7456913,06 667359,00 7456915,00
50 667844,83 7456611,20 667840,00 7456608,00 667844,45 7456613,18 667843,00 7456611,00
51 669848,83 7466607,20 669848,00 7466604,00 669851,79 7466605,23 669851,00 7466607,00
52 669436,83 7464747,20 669436,00 7464744,00 669435,93 7464745,96 669439,00 7464747,00
53 669332,83 7463583,20 669332,00 7463580,00 669331,96 7463582,42 669335,00 7463583,00
54 669872,83 7461939,20 669872,00 7461936,00 669875,78 7461939,07 669875,00 7461939,00
55 670060,83 7461027,20 670060,00 7461028,00 670059,72 7461027,43 670063,00 7461027,00
56 669520,83 7459923,20 669520,00 7459920,00 669519,90 7459923,87 669523,00 7459923,00
57 669132,83 7458911,20 669132,00 7458908,00 669132,03 7458912,27 669135,00 7458911,00
58 669388,83 7457975,20 669388,00 7457972,00 669387,94 7457972,64 669391,00 7457975,00
59 668584,83 7457195,20 668584,00 7457192,00 668584,21 7457196,95 668587,00 7457195,00
60 669340,83 7456683,20 669340,00 7456680,00 669339,96 7456685,15 669343,00 7456683,00
61 671692,83 7466611,20 671692,00 7466612,00 671695,18 7466613,22 671695,00 7466611,00
62 671528,83 7464999,20 671528,00 7464996,00 671527,24 7464997,86 671531,00 7464995,00
63 671984,83 7463771,20 671984,00 7463768,00 671987,08 7463770,35 671987,00 7463771,00
64 671824,83 7462355,20 671824,00 7462356,00 671823,14 7462358,91 671827,00 7462355,00
65 671612,83 7460959,20 671612,00 7460956,00 671611,21 7460959,46 671615,00 7460959,00
66 671348,83 7460035,20 671348,00 7460032,00 671351,29 7460035,83 671351,00 7460035,00
67 671636,83 7458843,20 671636,00 7458840,00 671635,20 7458840,30 671639,00 7458839,00
68 671564,83 7457603,20 671564,00 7457600,00 671567,22 7457604,79 671567,00 7457603,00
69 671252,83 7457095,20 671252,00 7457092,00 671251,33 7457096,99 671255,00 7457095,00
70 671752,83 7456603,20 671752,00 7456600,00 671751,16 7456601,19 671755,00 7456603,00
71 672768,83 7466527,20 672768,00 7466524,00 672770,83 7466525,26 672771,00 7466527,00
72 672796,83 7464487,20 672796,00 7464484,00 672794,82 7464486,06 672799,00 7464487,00
73 672468,83 7463339,20 672468,00 7463340,00 672470,92 7463338,52 672471,00 7463339,00
74 672528,83 7462315,20 672528,00 7462312,00 672526,91 7462314,92 672531,00 7462315,00
75 672772,83 7461255,20 672772,00 7461256,00 672774,82 7461255,34 672775,00 7461255,00
76 672184,83 7459919,20 672184,00 7459920,00 672183,02 7459919,87 672187,00 7459919,00
77 672084,83 7458459,20 672084,00 7458460,00 672087,05 7458460,45 672087,00 7458459,00
78 672576,83 7457919,20 672576,00 7457916,00 672578,89 7457920,66 672579,00 7457919,00
79 672548,83 7457279,20 672544,00 7457276,00 672546,90 7457276,92 672547,00 7457279,00
80 672616,83 7456723,20 672616,00 7456724,00 672618,88 7456725,14 672619,00 7456727,00
81 663068,83 7460835,20 663064,00 7460832,00 663066,03 7460835,51 663071,00 7460835,00
Tabela A2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens
Multiespectral Ikonos 00 geradas pelo K2ORTHO e pelos aplicativos comerciais.
Imagem Multiespectral Ikonos 00
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS

93
E N E N E N
1 0,83 0,80 1,84 2,08 2,17 0,20
2 0,83 3,20 1,89 1,31 2,17 0,20
3 0,83 0,80 2,06 0,83 2,17 0,20
4 0,83 3,20 2,12 0,34 2,17 0,20
5 0,83 3,20 1,81 0,08 2,17 0,20
6 0,83 3,20 2,29 3,45 2,17 4,20
7 0,83 3,20 1,82 3,00 2,17 0,20
8 0,83 3,20 2,08 2,62 2,17 4,20
9 0,83 3,20 1,84 1,71 2,17 0,20
10 0,83 3,20 2,10 2,04 2,17 0,20
11 0,83 0,80 1,21 2,04 2,17 0,20
12 0,17 0,80 2,34 2,76 3,17 0,20
13 0,83 0,80 1,29 2,95 2,17 0,20
14 0,83 3,20 1,49 0,21 2,17 0,20
15 0,83 3,20 1,43 0,10 2,17 0,20
16 0,83 3,20 1,14 3,38 2,17 0,20
17 0,83 3,20 1,44 1,04 2,17 0,20
18 0,83 3,20 1,28 2,53 2,17 0,20
19 0,83 3,20 1,39 2,18 2,17 0,20
20 0,83 3,20 1,41 2,06 2,17 0,20
21 0,83 0,80 0,63 2,40 2,17 0,20
22 0,83 3,20 0,53 1,15 2,17 0,20
23 0,83 3,20 0,81 0,69 2,17 0,20
24 0,83 3,20 0,82 0,27 2,17 0,20
25 0,83 3,20 0,71 0,06 2,17 0,20
26 0,83 3,20 0,75 0,51 2,17 0,20
27 0,83 3,20 0,73 1,33 2,17 0,20
28 0,83 3,20 0,73 1,62 2,17 0,20
29 0,83 3,20 0,77 2,01 2,17 0,20
30 0,83 0,80 0,81 2,31 2,17 0,20
31 0,83 0,80 3,74 2,02 2,17 0,20
32 0,83 3,20 0,11 1,32 2,17 0,20
33 0,83 3,20 0,15 0,80 2,17 0,20
34 4,83 0,80 3,75 0,35 1,83 0,20
35 0,83 3,20 0,19 0,20 2,17 0,20
36 4,83 3,20 0,26 0,60 2,17 0,20
37 0,83 3,20 0,41 1,14 2,17 0,20
38 0,83 3,20 0,35 2,35 2,17 0,20
39 0,83 3,20 0,40 2,15 2,17 0,20
40 0,83 3,20 0,29 2,05 2,17 0,20
41 0,83 3,20 0,47 1,97 2,17 0,20
42 0,83 3,20 0,23 1,02 2,17 0,20
43 0,83 3,20 0,53 0,38 2,17 0,20
44 4,83 3,20 0,64 0,12 1,83 0,20
45 0,83 3,20 0,14 0,47 2,17 0,20
46 0,83 3,20 3,82 0,62 2,17 0,20
47 4,83 3,20 4,12 1,30 1,83 0,20

94
48 4,83 3,20 0,15 1,68 1,83 0,20
49 4,83 3,20 4,22 2,14 1,83 0,20
50 4,83 3,20 0,38 1,98 1,83 0,20
51 0,83 3,20 2,96 1,97 2,17 0,20
52 0,83 3,20 0,90 1,24 2,17 0,20
53 0,83 3,20 0,87 0,78 2,17 0,20
54 0,83 3,20 2,95 0,13 2,17 0,20
55 0,83 0,80 1,11 0,23 2,17 0,20
56 0,83 3,20 0,93 0,67 2,17 0,20
57 0,83 3,20 0,80 1,07 2,17 0,20
58 0,83 3,20 0,89 2,56 2,17 0,20
59 0,83 3,20 0,62 1,75 2,17 0,20
60 0,83 3,20 0,87 1,95 2,17 0,20
61 0,83 0,80 2,35 2,02 2,17 0,20
62 0,83 3,20 1,59 1,34 2,17 4,20
63 0,83 3,20 2,25 0,85 2,17 0,20
64 0,83 0,80 1,69 3,71 2,17 0,20
65 0,83 3,20 1,62 0,26 2,17 0,20
66 0,83 3,20 2,46 0,63 2,17 0,20
67 0,83 3,20 1,63 2,90 2,17 4,20
68 0,83 3,20 2,39 1,59 2,17 0,20
69 0,83 3,20 1,50 1,79 2,17 0,20
70 0,83 3,20 1,67 2,01 2,17 0,20
71 0,83 3,20 2,00 1,94 2,17 0,20
72 0,83 3,20 2,01 1,14 2,17 0,20
73 0,83 0,80 2,09 0,68 2,17 0,20
74 0,83 3,20 1,92 0,28 2,17 0,20
75 0,83 0,80 1,99 0,14 2,17 0,20
76 0,83 0,80 1,81 0,67 2,17 0,20
77 0,83 0,80 2,22 1,25 2,17 0,20
78 0,83 3,20 2,06 1,46 2,17 0,20
79 4,83 3,20 1,93 2,28 1,83 0,20
80 0,83 0,80 2,05 1,94 2,17 3,80
81 4,83 3,20 2,80 0,31 2,17 0,20
Tabela A3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 81 CPs para as
ortoimagens Multiespectral Ikonos 00 geradas pelos três softwares comerciais.
Imagem Multiespectral Ikonos 00 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 2,67 1,28 0,33 2,28 3,00 1,00
2 2,72 1,89 0,28 1,11 3,00 3,00
3 1,23 1,63 4,23 0,63 3,00 1,00
4 1,29 2,86 4,29 0,14 3,00 3,00
5 2,64 3,28 0,36 0,28 3,00 3,00
6 1,46 0,25 4,46 0,75 3,00 1,00
7 2,65 0,20 0,35 2,80 3,00 3,00
8 1,25 0,58 4,25 1,58 3,00 1,00

95
9 2,67 4,91 0,33 1,91 3,00 3,00
10 1,27 1,16 4,27 1,84 3,00 3,00
11 2,04 1,24 0,96 2,24 3,00 1,00
12 2,17 1,96 0,83 2,96 3,00 1,00
13 2,12 2,15 0,88 3,15 3,00 1,00
14 2,32 2,99 0,68 0,01 3,00 3,00
15 2,26 3,10 0,74 0,10 3,00 3,00
16 1,97 0,18 1,03 3,18 3,00 3,00
17 2,27 4,24 0,73 1,24 3,00 3,00
18 2,11 0,67 0,89 2,33 3,00 3,00
19 2,22 1,02 0,78 1,98 3,00 3,00
20 2,24 1,14 0,76 1,86 3,00 3,00
21 1,46 1,60 1,54 2,60 3,00 1,00
22 1,36 2,05 1,64 0,95 3,00 3,00
23 1,64 2,51 1,36 0,49 3,00 3,00
24 1,65 2,93 1,35 0,07 3,00 3,00
25 1,54 3,14 1,46 0,14 3,00 3,00
26 1,58 3,71 1,42 0,71 3,00 3,00
27 1,56 4,53 1,44 1,53 3,00 3,00
28 1,56 4,82 1,44 1,82 3,00 3,00
29 1,60 1,19 1,40 1,81 3,00 3,00
30 1,64 1,51 1,36 2,51 3,00 1,00
31 2,91 1,22 5,91 2,22 3,00 1,00
32 0,94 1,88 2,06 1,12 3,00 3,00
33 0,98 2,40 2,02 0,60 3,00 3,00
34 1,08 1,15 1,92 0,15 3,00 1,00
35 1,02 3,40 1,98 0,40 3,00 3,00
36 5,09 3,80 1,91 0,80 7,00 3,00
37 1,24 4,34 1,76 1,34 3,00 3,00
38 1,18 0,85 1,82 2,15 3,00 3,00
39 1,23 1,05 1,77 1,95 3,00 3,00
40 1,12 1,15 1,88 1,85 3,00 3,00
41 0,36 1,23 2,64 1,77 3,00 3,00
42 0,60 2,18 2,40 0,82 3,00 3,00
43 0,30 2,82 2,70 0,18 3,00 3,00
44 4,19 3,32 1,19 0,32 3,00 3,00
45 0,69 3,67 2,31 0,67 3,00 3,00
46 4,65 3,82 1,65 0,82 3,00 3,00
47 0,71 4,50 2,29 1,50 3,00 3,00
48 4,68 4,88 1,68 1,88 3,00 3,00
49 0,61 1,06 2,39 1,94 3,00 3,00
50 4,45 5,18 1,45 2,18 3,00 3,00
51 3,79 1,23 0,79 1,77 3,00 3,00
52 0,07 1,96 3,07 1,04 3,00 3,00
53 0,04 2,42 3,04 0,58 3,00 3,00
54 3,78 3,07 0,78 0,07 3,00 3,00
55 0,28 0,57 3,28 0,43 3,00 1,00
56 0,10 3,87 3,10 0,87 3,00 3,00

96
57 0,03 4,27 2,97 1,27 3,00 3,00
58 0,06 0,64 3,06 2,36 3,00 3,00
59 0,21 4,95 2,79 1,95 3,00 3,00
60 0,04 5,15 3,04 2,15 3,00 3,00
61 3,18 1,22 0,18 2,22 3,00 1,00
62 0,76 1,86 3,76 2,86 3,00 1,00
63 3,08 2,35 0,08 0,65 3,00 3,00
64 0,86 2,91 3,86 3,91 3,00 1,00
65 0,79 3,46 3,79 0,46 3,00 3,00
66 3,29 3,83 0,29 0,83 3,00 3,00
67 0,80 0,30 3,80 1,30 3,00 1,00
68 3,22 4,79 0,22 1,79 3,00 3,00
69 0,67 4,99 3,67 1,99 3,00 3,00
70 0,84 1,19 3,84 1,81 3,00 3,00
71 2,83 1,26 0,17 1,74 3,00 3,00
72 1,18 2,06 4,18 0,94 3,00 3,00
73 2,92 1,48 0,08 0,48 3,00 1,00
74 1,09 2,92 4,09 0,08 3,00 3,00
75 2,82 0,66 0,18 0,34 3,00 1,00
76 0,98 0,13 3,98 0,87 3,00 1,00
77 3,05 0,45 0,05 1,45 3,00 1,00
78 2,89 4,66 0,11 1,66 3,00 3,00
79 2,90 0,92 0,10 2,08 3,00 3,00
80 2,88 1,14 0,12 1,86 3,00 3,00
81 2,03 3,51 4,97 0,51 7,00 3,00
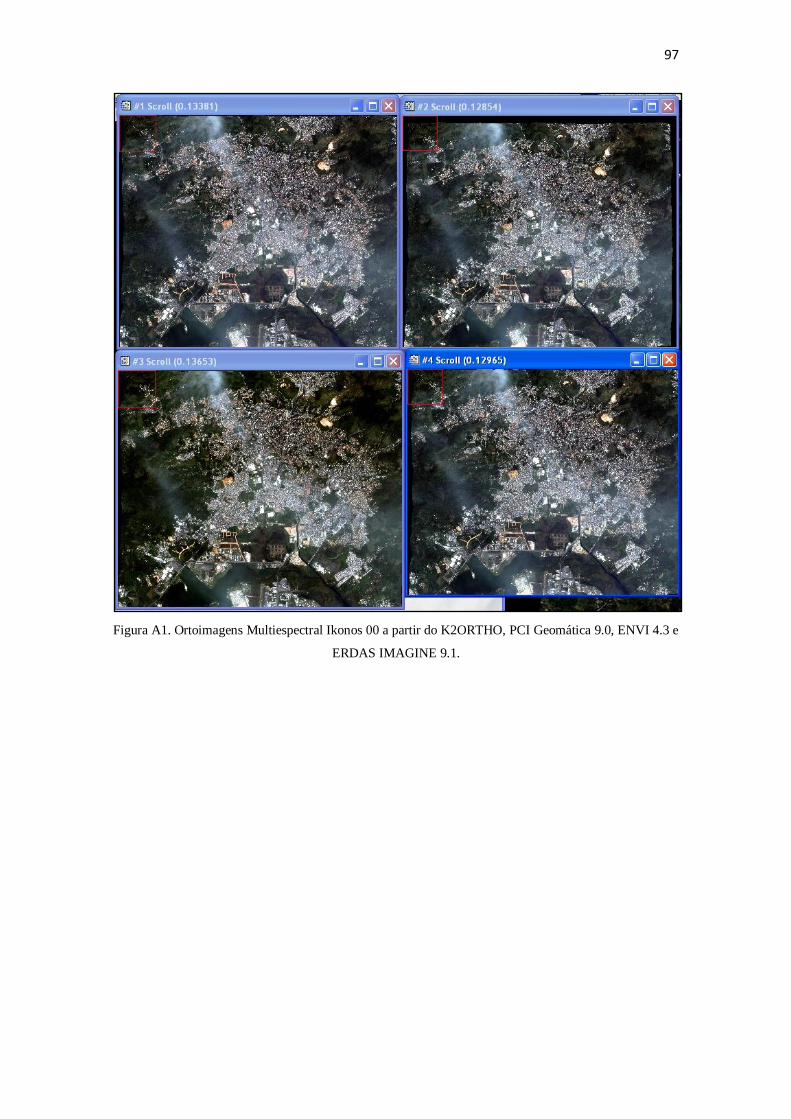
97
Figura A1. Ortoimagens Multiespectral Ikonos 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e
ERDAS IMAGINE 9.1.

98
APÊNDICE B
IMAGEM MULTIESPECTRAL IKONOS 03
Tabela B1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens Multiespectral
Ikonos 03.
Imagem Multiespectral Ikonos 03
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 656836,83 7466707,20 656836,03 7466710,10 656838,81 7466709,25 656838,00 7466704,00
2 657108,83 7464499,20 657108,03 7464498,09 657110,64 7464498,13 657110,00 7464496,00
3 657180,83 7462707,20 657180,03 7462710,09 657182,59 7462706,85 657182,00 7462704,00
4 657428,83 7461995,20 657428,03 7461998,09 657430,43 7461995,13 657430,00 7461992,00
5 657172,83 7460939,20 657172,03 7460942,09 657174,60 7460939,55 657174,00 7460936,00
6 657880,83 7460587,20 657880,03 7460590,09 657882,15 7460587,69 657882,00 7460584,00
7 657172,83 7458419,20 657176,03 7458422,08 657174,60 7458420,56 657178,00 7458416,00
8 657244,83 7457171,20 657248,03 7457174,08 657250,55 7457173,05 657250,00 7457172,00
9 657152,83 7457691,20 657156,03 7457694,08 657158,61 7457692,85 657158,00 7457688,00
10 657504,83 7456851,20 657508,03 7456854,08 657510,38 7456853,18 657510,00 7456852,00
11 659304,83 7466711,20 659304,04 7466714,10 659305,25 7466713,25 659306,00 7466712,00
12 658804,83 7465155,20 658804,03 7465158,09 658805,57 7465157,87 658806,00 7465156,00
13 659044,83 7463935,20 659044,03 7463938,09 659045,41 7463938,36 659046,00 7463936,00
14 659120,83 7462039,20 659120,03 7462042,09 659121,37 7462039,11 659122,00 7462036,00
15 659028,83 7461299,20 659028,03 7461302,09 659029,42 7461299,41 659030,00 7461296,00
16 659080,83 7459975,20 659080,03 7459978,09 659081,39 7459975,94 659082,00 7459976,00
17 659480,83 7458971,20 659480,04 7458974,08 659481,14 7458972,34 659482,00 7458972,00
18 659380,83 7457807,20 659384,04 7457810,08 659381,20 7457808,80 659382,00 7457808,00
19 659884,83 7457251,20 659888,04 7457254,08 659888,88 7457253,02 659890,00 7457252,00
20 659824,83 7456783,20 659824,04 7456786,08 659824,92 7456785,21 659826,00 7456784,00
21 661400,83 7466719,20 661400,04 7466722,10 661399,93 7466721,25 661402,00 7466716,00
22 661168,83 7464967,20 661172,04 7464970,09 661172,07 7464969,94 661170,00 7464968,00
23 661324,83 7464423,20 661324,04 7464426,09 661323,98 7464422,16 661326,00 7464420,00
24 661320,83 7462687,20 661320,04 7462690,09 661319,98 7462686,85 661322,00 7462688,00
25 660860,83 7461131,20 660860,04 7461134,09 660860,27 7461131,48 660862,00 7461132,00
26 661888,83 7459963,20 661888,04 7459966,09 661887,62 7459963,94 661890,00 7459964,00
27 661620,83 7458539,20 661624,04 7458542,08 661623,79 7458540,51 661626,00 7458540,00
28 661728,83 7457571,20 661728,04 7457574,08 661727,72 7457572,89 661730,00 7457572,00
29 662036,83 7457239,20 662040,04 7457242,08 662039,52 7457241,03 662038,00 7457240,00
30 662212,83 7456791,20 662212,04 7456794,08 662215,41 7456793,20 662214,00 7456792,00
31 663092,83 7466695,20 663092,04 7466698,10 663094,86 7466697,26 663094,00 7466696,00
32 662916,83 7465219,20 662916,04 7465222,09 662914,97 7465217,85 662918,00 7465216,00
33 662992,83 7464227,20 662992,04 7464230,09 662990,92 7464226,24 662994,00 7464224,00
34 662980,83 7462203,20 662980,04 7462206,09 662978,93 7462203,05 662982,00 7462200,00
35 663020,83 7461127,20 663020,04 7461130,09 663018,91 7461127,48 663022,00 7461128,00
36 663020,83 7460551,20 663020,04 7460554,09 663018,91 7460551,71 663022,00 7460548,00
37 663024,83 7459355,20 663028,04 7459358,08 663026,90 7459356,18 663026,00 7459356,00
38 662956,83 7458183,20 662960,04 7458186,08 662958,94 7458184,65 662958,00 7458184,00
39 662804,83 7457207,20 662804,04 7457210,08 662807,04 7457209,04 662806,00 7457208,00

99
Tabela B2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens geradas pelo
K2ORTHO e pelos aplicativos comerciais para a imagem Multiespectral Ikonos 03.
Imagem Multiespectral Ikonos 03 K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
1 0,80 2,90 1,98 2,05 1,17 3,20
2 0,80 1,11 1,81 1,07 1,17 3,20
3 0,80 2,89 1,76 0,35 1,17 3,20
4 0,80 2,89 1,60 0,07 1,17 3,20
5 0,80 2,89 1,77 0,35 1,17 3,20
6 0,80 2,89 1,32 0,49 1,17 3,20
7 3,20 2,88 1,77 1,36 5,17 3,20
8 3,20 2,88 5,72 1,85 5,17 0,80
9 3,20 2,88 5,78 1,65 5,17 3,20
10 3,20 2,88 5,55 1,98 5,17 0,80
11 0,79 2,90 0,42 2,05 1,17 0,80
12 0,80 2,89 0,74 2,67 1,17 0,80
13 0,80 2,89 0,58 3,16 1,17 0,80
14 0,80 2,89 0,54 0,09 1,17 3,20
15 0,80 2,89 0,59 0,21 1,17 3,20
16 0,80 2,89 0,56 0,74 1,17 0,80
17 0,79 2,88 0,31 1,14 1,17 0,80
18 3,21 2,88 0,37 1,60 1,17 0,80
19 3,21 2,88 4,05 1,82 5,17 0,80
20 0,79 2,88 0,09 2,01 1,17 0,80
21 0,79 2,90 0,90 2,05 1,17 3,20
22 3,21 2,89 3,24 2,74 1,17 0,80
23 0,79 2,89 0,85 1,04 1,17 3,20
24 0,79 2,89 0,85 0,35 1,17 0,80
25 0,79 2,89 0,56 0,28 1,17 0,80
26 0,79 2,89 1,21 0,74 1,17 0,80
27 3,21 2,88 2,96 1,31 5,17 0,80
28 0,79 2,88 1,11 1,69 1,17 0,80
29 3,21 2,88 2,69 1,83 1,17 0,80
30 0,79 2,88 2,58 2,00 1,17 0,80
31 0,79 2,90 2,03 2,06 1,17 0,80
32 1,07 4,24 0,00 0,00 3,03 1,85
33 0,79 2,89 1,91 0,96 1,17 3,20
34 0,79 2,89 1,90 0,15 1,17 3,20
35 0,79 2,89 1,92 0,28 1,17 0,80
36 0,79 2,89 1,92 0,51 1,17 3,20
37 3,21 2,88 2,07 0,98 1,17 0,80
38 3,21 2,88 2,11 1,45 1,17 0,80
39 0,79 2,88 2,21 1,84 1,17 0,80
40 3,21 2,88 2,65 1,93 1,17 0,80
40 662100,83 7456967,20 662104,04 7456970,08 662103,48 7456969,13 662102,00 7456968,00
41 660164,83 7464743,20 660164,04 7464746,09 660164,71 7464742,04 660166,00 7464740,00

100
41 0,79 2,89 0,12 1,16 1,17 3,20
Tabela B3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 41 CPs para as
ortoimagens Multiespectral Ikonos 03 geradas pelos três softwares comerciais.
Imagem Multiespectral Ikonos 03 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 2,78 0,85 0,81 5,25 1,97 6,10
2 2,61 0,04 0,64 2,13 1,97 2,09
3 2,56 3,24 0,59 2,85 1,97 6,09
4 2,40 2,96 0,43 3,13 1,97 6,09
5 2,57 2,54 0,60 3,55 1,97 6,09
6 2,12 2,40 0,15 3,69 1,97 6,09
7 1,43 1,52 3,40 4,56 1,97 6,08
8 2,52 1,03 0,55 1,05 1,97 2,08
9 2,58 1,23 0,61 4,85 1,97 6,08
10 2,35 0,90 0,38 1,18 1,97 2,08
11 1,21 0,85 0,75 1,25 1,96 2,10
12 1,54 0,22 0,43 1,87 1,97 2,09
13 1,38 0,27 0,59 2,36 1,97 2,09
14 1,34 2,98 0,63 3,11 1,97 6,09
15 1,39 2,68 0,58 3,41 1,97 6,09
16 1,36 2,15 0,61 0,06 1,97 2,09
17 1,10 1,74 0,86 0,34 1,96 2,08
18 2,84 1,28 0,80 0,80 2,04 2,08
19 0,84 1,06 1,12 1,02 1,96 2,08
20 0,88 0,87 1,08 1,21 1,96 2,08
21 0,11 0,85 2,07 5,25 1,96 6,10
22 0,03 0,15 2,07 1,94 2,04 2,09
23 0,06 3,93 2,02 2,16 1,96 6,09
24 0,06 3,24 2,02 1,15 1,96 2,09
25 0,23 2,61 1,73 0,52 1,96 2,09
26 0,42 2,15 2,38 0,06 1,96 2,09
27 0,25 1,57 2,21 0,51 1,96 2,08
28 0,32 1,19 2,28 0,89 1,96 2,08
29 0,52 1,05 1,52 1,03 2,04 2,08
30 3,37 0,88 1,41 1,20 1,96 2,08
31 2,82 0,84 0,86 1,26 1,96 2,10
32 1,07 4,24 3,03 1,85 1,96 6,09
33 1,12 3,85 3,08 2,24 1,96 6,09
34 1,11 3,04 3,07 3,05 1,96 6,09
35 1,13 2,61 3,09 0,52 1,96 2,09
36 1,13 2,38 3,09 3,71 1,96 6,09
37 1,14 1,90 0,90 0,18 2,04 2,08
38 1,10 1,43 0,94 0,65 2,04 2,08
39 3,00 1,04 1,04 1,04 1,96 2,08
40 0,56 0,95 1,48 1,13 2,04 2,08
41 0,67 4,05 1,29 2,04 1,96 6,09

101
Figura B1. Ortoimagens Multiespectral Ikonos 03 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e
ERDAS IMAGINE 9.1.

102
APÊNDICE C
IMAGEM PANCROMÁTICA IKONOS 00
Tabela C1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens Pancromática
Ikonos 00.
Imagem Pancromática Ikonos 00
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 660862,83 7466632,20 660862,00 7466631,00 660863,29 7466632,70 660863,50 7466632,50
2 660843,83 7465513,20 660842,00 7465511,00 660843,30 7465512,81 660843,50 7465512,50
3 660848,83 7464416,20 660847,00 7464415,00 660848,29 7464415,92 660848,50 7464416,50
4 660842,83 7463286,20 660842,00 7463285,00 660843,30 7463286,03 660842,50 7463286,50
5 660960,83 7462255,20 660960,00 7462254,00 660961,29 7462255,13 660961,50 7462254,50
6 660919,83 7461185,20 660919,00 7461184,00 660920,29 7461185,24 660920,50 7461185,50
7 661077,83 7460258,20 661076,00 7460257,00 661078,28 7460259,33 661078,50 7460259,50
8 660859,83 7458952,20 660858,00 7458951,00 660859,29 7458952,46 660859,50 7458952,50
9 660738,83 7457818,20 660737,00 7457816,00 660738,30 7457817,57 660738,50 7457817,50
10 660778,83 7456816,20 660778,00 7456815,00 660779,30 7456816,67 660779,50 7456816,50
11 662681,83 7466648,20 662681,00 7466647,00 662682,14 7466648,69 662682,50 7466648,50
12 662706,83 7465452,20 662706,00 7465451,00 662708,14 7465453,81 662707,50 7465452,50
13 662662,83 7464217,20 662661,00 7464216,00 662662,15 7464217,94 662662,50 7464217,50
14 662753,83 7462756,20 662753,00 7462755,00 662754,14 7462757,08 662754,50 7462756,50
15 662760,83 7461758,20 662760,00 7461757,00 662761,14 7461758,18 662760,50 7461758,50
16 662620,83 7460799,20 662619,00 7460797,00 662620,15 7460798,27 662620,50 7460798,50
17 662485,83 7459619,20 662484,00 7459617,00 662485,16 7459618,39 662485,50 7459618,50
18 662556,83 7458967,20 662555,00 7458966,00 662556,15 7458967,46 662556,50 7458967,50
19 663082,83 7457858,20 663081,00 7457857,00 663083,11 7457858,56 663082,50 7457858,50
20 662860,83 7456617,20 662859,00 7456615,00 662861,13 7456616,69 662860,50 7456616,50
21 664540,83 7466625,20 664539,00 7466624,00 664540,99 7466625,70 664540,50 7466625,50
22 664771,83 7465382,20 664770,00 7465380,00 664770,97 7465381,82 664771,50 7465381,50
23 664543,83 7463778,20 664542,00 7463777,00 664542,99 7463777,98 664543,50 7463778,50
24 664621,83 7462884,20 664620,00 7462882,00 664621,98 7462884,07 664621,50 7462884,50
25 664349,83 7461957,20 664349,00 7461956,00 664350,01 7461958,16 664350,50 7461957,50
26 664615,83 7461007,20 664614,00 7461005,00 664615,98 7461007,25 664615,50 7461006,50
27 664462,83 7460174,20 664462,00 7460173,00 664463,00 7460174,34 664462,50 7460174,50
28 664279,83 7459154,20 664279,00 7459153,00 664280,01 7459154,44 664279,50 7459154,50
29 664495,83 7457408,20 664495,00 7457406,00 664495,99 7457407,61 664496,50 7457407,50
30 664365,83 7456680,20 664365,00 7456678,00 664366,00 7456679,68 664366,50 7456679,50
31 665907,83 7466639,20 665907,00 7466638,00 665907,88 7466639,70 665908,50 7466639,50
32 665854,83 7465336,20 665853,00 7465335,00 665854,88 7465336,82 665854,50 7465336,50
33 665935,83 7464049,20 665934,00 7464047,00 665935,88 7464048,95 665935,50 7464048,50
34 665894,83 7462866,20 665893,00 7462865,00 665894,88 7462866,07 665894,50 7462866,50
35 665764,83 7461812,20 665764,00 7461811,00 665764,89 7461812,17 665764,50 7461812,50
36 665718,83 7461019,20 665717,00 7461018,00 665718,89 7461019,25 665718,50 7461019,50
37 665371,83 7459890,20 665371,00 7459889,00 665371,92 7459890,36 665372,50 7459890,50
38 665364,83 7458520,20 665364,00 7458518,00 665364,92 7458519,50 665365,50 7458519,50
39 665579,83 7457259,20 665578,00 7457257,00 665579,90 7457258,62 665579,50 7457258,50

103
40 665549,83 7456671,20 665548,00 7456669,00 665549,91 7456670,68 665549,50 7456670,50
41 667345,83 7466631,20 667344,00 7466629,00 667345,76 7466630,70 667345,50 7466630,50
42 667356,83 7465550,20 667355,00 7465548,00 667356,76 7465549,80 667356,50 7465550,50
43 667383,83 7464187,20 667383,00 7464185,00 667383,76 7464186,94 667384,50 7464186,50
44 667396,83 7462931,20 667395,00 7462929,00 667396,76 7462931,06 667397,50 7462931,50
45 667385,83 7461857,20 667384,00 7461856,00 667385,76 7461857,17 667385,50 7461857,50
46 667293,83 7460931,20 667292,00 7460930,00 667293,76 7460931,26 667293,50 7460931,50
47 667136,83 7459600,20 667135,00 7459598,00 667136,78 7459599,39 667136,50 7459599,50
48 667213,83 7458400,20 667213,00 7458398,00 667213,77 7458399,51 667213,50 7458399,50
49 666871,83 7457606,20 666870,00 7457604,00 666871,80 7457605,59 666871,50 7457605,50
50 667164,83 7456610,20 667164,00 7456608,00 667164,77 7456609,69 667165,50 7456609,50
51 668874,83 7466644,20 668873,00 7466643,00 668874,63 7466643,70 668874,50 7466644,50
52 668780,83 7465454,20 668780,00 7465453,00 668780,64 7465454,81 668780,50 7465454,50
53 668873,83 7463726,20 668873,00 7463724,00 668874,63 7463725,98 668874,50 7463725,50
54 668852,83 7462703,20 668851,00 7462702,00 668852,64 7462703,09 668852,50 7462703,50
55 668938,83 7461880,20 668937,00 7461878,00 668938,63 7461880,17 668938,50 7461880,50
56 668798,83 7460903,20 668797,00 7460902,00 668798,64 7460903,26 668798,50 7460903,50
57 668948,83 7459366,20 668947,00 7459364,00 668948,63 7459365,42 668948,50 7459365,50
58 668891,83 7458008,20 668890,00 7458006,00 668891,63 7458007,55 668891,50 7458007,50
59 668804,83 7457231,20 668803,00 7457229,00 668804,64 7457230,63 668804,50 7457230,50
60 668768,83 7456604,20 668767,00 7456602,00 668768,64 7456603,69 668768,50 7456603,50
61 671299,83 7466649,20 671299,00 7466647,00 671299,43 7466648,69 671299,50 7466648,50
62 671181,83 7465304,20 671180,00 7465302,00 671181,44 7465303,83 671181,50 7465304,50
63 671111,83 7463914,20 671110,00 7463913,00 671112,45 7463914,97 671111,50 7463914,50
64 671175,83 7462561,20 671175,00 7462559,00 671176,44 7462561,10 671176,50 7462561,50
65 671158,83 7461612,20 671157,00 7461611,00 671158,45 7461612,19 671158,50 7461612,50
66 671350,83 7460577,20 671349,00 7460576,00 671350,43 7460577,30 671350,50 7460577,50
67 671347,83 7459475,20 671347,00 7459474,00 671348,43 7459475,40 671347,50 7459475,50
68 671369,83 7458266,20 671369,00 7458264,00 671370,43 7458266,52 671370,50 7458266,50
69 671251,83 7457123,20 671251,00 7457122,00 671252,44 7457123,64 671252,50 7457123,50
70 671306,83 7456600,20 671306,00 7456598,00 671307,43 7456599,69 671307,50 7456599,50
71 672770,83 7466631,20 672770,00 7466630,00 672771,31 7466631,70 672771,50 7466631,50
72 672811,83 7465414,20 672811,00 7465413,00 672812,31 7465414,82 672812,50 7465414,50
73 672776,83 7463721,20 672776,00 7463719,00 672777,31 7463720,98 672777,50 7463720,50
74 672671,83 7462426,20 672670,00 7462424,00 672671,32 7462425,11 672671,50 7462425,50
75 672707,83 7461614,20 672707,00 7461613,00 672709,32 7461615,19 672708,50 7461614,50
76 672733,83 7461533,20 672733,00 7461531,00 672734,32 7461533,20 672734,50 7461533,50
77 672779,83 7461356,20 672779,00 7461355,00 672780,31 7461357,22 672780,50 7461356,50
78 672645,83 7459445,20 672645,00 7459444,00 672646,32 7459445,41 672646,50 7459445,50
79 672718,83 7458378,20 672717,00 7458376,00 672718,32 7458377,51 672718,50 7458377,50
80 672545,83 7457277,20 672543,00 7457275,00 672544,33 7457276,62 672544,50 7457276,50
81 672542,83 7456653,20 672541,00 7456651,00 672543,33 7456653,68 672542,50 7456653,50
Tabela C2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens Pancromática
Ikonos 00 geradas pelo K2ORTHO e pelos aplicativos comerciais.
Imagem Pancromática Ikonos 00
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS

104
E N E N E N
1 0,83 1,20 0,46 0,50 0,67 0,30
2 1,83 2,20 0,53 0,39 0,33 0,70
3 1,83 1,20 0,54 0,28 0,33 0,30
4 0,83 1,20 0,47 0,17 0,33 0,30
5 0,83 1,20 0,46 0,07 0,67 0,70
6 0,83 1,20 0,46 0,04 0,67 0,30
7 1,83 1,20 0,45 1,13 0,67 1,30
8 1,83 1,20 0,54 0,26 0,33 0,30
9 1,83 2,20 0,53 0,63 0,33 0,70
10 0,83 1,20 0,47 0,47 0,67 0,30
11 0,83 1,20 0,31 0,49 0,67 0,30
12 0,83 1,20 1,31 1,61 0,67 0,30
13 1,83 1,20 0,68 0,74 0,33 0,30
14 0,83 1,20 0,31 0,88 0,67 0,30
15 0,83 1,20 0,31 0,02 0,33 0,30
16 1,83 2,20 0,68 0,93 0,33 0,70
17 1,83 2,20 0,67 0,81 0,33 0,70
18 1,83 1,20 0,68 0,26 0,33 0,30
19 1,83 1,20 0,28 0,36 0,33 0,30
20 1,83 2,20 0,30 0,51 0,33 0,70
21 1,83 1,20 0,16 0,50 0,33 0,30
22 1,83 2,20 0,86 0,38 0,33 0,70
23 1,83 1,20 0,84 0,22 0,33 0,30
24 1,83 2,20 0,15 0,13 0,33 0,30
25 0,83 1,20 0,18 0,96 0,67 0,30
26 1,83 2,20 0,15 0,05 0,33 0,70
27 0,83 1,20 0,17 0,14 0,33 0,30
28 0,83 1,20 0,18 0,24 0,33 0,30
29 0,83 2,20 0,16 0,59 0,67 0,70
30 0,83 2,20 0,17 0,52 0,67 0,70
31 0,83 1,20 0,05 0,50 0,67 0,30
32 1,83 1,20 0,05 0,62 0,33 0,30
33 1,83 2,20 0,05 0,25 0,33 0,70
34 1,83 1,20 0,05 0,13 0,33 0,30
35 0,83 1,20 0,06 0,03 0,33 0,30
36 1,83 1,20 0,06 0,05 0,33 0,30
37 0,83 1,20 0,09 0,16 0,67 0,30
38 0,83 2,20 0,09 0,70 0,67 0,70
39 1,83 2,20 0,07 0,58 0,33 0,70
40 1,83 2,20 0,08 0,52 0,33 0,70
41 1,83 2,20 0,07 0,50 0,33 0,70
42 1,83 2,20 0,07 0,40 0,33 0,30
43 0,83 2,20 0,07 0,26 0,67 0,70
44 1,83 2,20 0,07 0,14 0,67 0,30
45 1,83 1,20 0,07 0,03 0,33 0,30
46 1,83 1,20 0,07 0,06 0,33 0,30
47 1,83 2,20 0,05 0,81 0,33 0,70

105
48 0,83 2,20 0,06 0,69 0,33 0,70
49 1,83 2,20 0,03 0,61 0,33 0,70
50 0,83 2,20 0,06 0,51 0,67 0,70
51 1,83 1,20 0,20 0,50 0,33 0,30
52 0,83 1,20 0,19 0,61 0,33 0,30
53 0,83 2,20 0,80 0,22 0,67 0,70
54 1,83 1,20 0,19 0,11 0,33 0,30
55 1,83 2,20 0,20 0,03 0,33 0,30
56 1,83 1,20 0,19 0,06 0,33 0,30
57 1,83 2,20 0,20 0,78 0,33 0,70
58 1,83 2,20 0,20 0,65 0,33 0,70
59 1,83 2,20 0,19 0,57 0,33 0,70
60 1,83 2,20 0,19 0,51 0,33 0,70
61 0,83 2,20 0,40 0,51 0,33 0,70
62 1,83 2,20 0,39 0,37 0,33 0,30
63 1,83 1,20 0,62 0,77 0,33 0,30
64 0,83 2,20 0,61 0,10 0,67 0,30
65 1,83 1,20 0,38 0,01 0,33 0,30
66 1,83 1,20 0,40 0,10 0,33 0,30
67 0,83 1,20 0,60 0,20 0,33 0,30
68 0,83 2,20 0,60 0,32 0,67 0,30
69 0,83 1,20 0,61 0,44 0,67 0,30
70 0,83 2,20 0,60 0,51 0,67 0,70
71 0,83 1,20 0,48 0,50 0,67 0,30
72 0,83 1,20 0,48 0,62 0,67 0,30
73 0,83 2,20 0,48 0,22 0,67 0,70
74 1,83 2,20 0,51 1,09 0,33 0,70
75 0,83 1,20 1,49 0,99 0,67 0,30
76 0,83 2,20 0,49 0,00 0,67 0,30
77 0,83 1,20 0,48 1,02 0,67 0,30
78 0,83 1,20 0,49 0,21 0,67 0,30
79 1,83 2,20 0,51 0,69 0,33 0,70
80 2,83 2,20 1,50 0,58 1,33 0,70
81 1,83 2,20 0,50 0,48 0,33 0,30
Tabela C3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 81 CPs para as
ortoimagens Pancromática Ikonos 00 geradas pelos três softwares comerciais.
Imagem Pancromática Ikonos 00
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 1,29 1,70 0,21 0,20 1,50 1,50
2 1,30 1,81 0,20 0,31 1,50 1,50
3 1,29 0,92 0,21 0,58 1,50 1,50
4 1,30 1,03 0,80 0,47 0,50 1,50
5 1,29 1,13 0,21 0,63 1,50 0,50
6 1,29 1,24 0,21 0,26 1,50 1,50
7 2,28 2,33 0,22 0,17 2,50 2,50
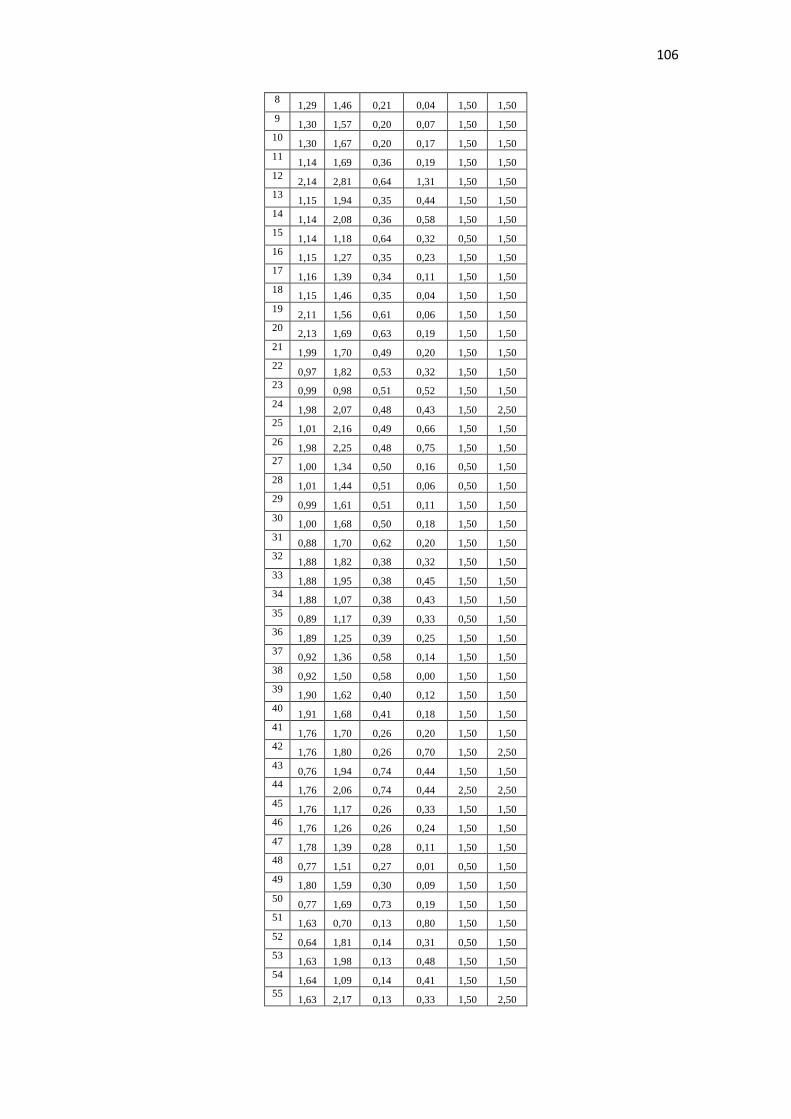
106
8 1,29 1,46 0,21 0,04 1,50 1,50
9 1,30 1,57 0,20 0,07 1,50 1,50
10 1,30 1,67 0,20 0,17 1,50 1,50
11 1,14 1,69 0,36 0,19 1,50 1,50
12 2,14 2,81 0,64 1,31 1,50 1,50
13 1,15 1,94 0,35 0,44 1,50 1,50
14 1,14 2,08 0,36 0,58 1,50 1,50
15 1,14 1,18 0,64 0,32 0,50 1,50
16 1,15 1,27 0,35 0,23 1,50 1,50
17 1,16 1,39 0,34 0,11 1,50 1,50
18 1,15 1,46 0,35 0,04 1,50 1,50
19 2,11 1,56 0,61 0,06 1,50 1,50
20 2,13 1,69 0,63 0,19 1,50 1,50
21 1,99 1,70 0,49 0,20 1,50 1,50
22 0,97 1,82 0,53 0,32 1,50 1,50
23 0,99 0,98 0,51 0,52 1,50 1,50
24 1,98 2,07 0,48 0,43 1,50 2,50
25 1,01 2,16 0,49 0,66 1,50 1,50
26 1,98 2,25 0,48 0,75 1,50 1,50
27 1,00 1,34 0,50 0,16 0,50 1,50
28 1,01 1,44 0,51 0,06 0,50 1,50
29 0,99 1,61 0,51 0,11 1,50 1,50
30 1,00 1,68 0,50 0,18 1,50 1,50
31 0,88 1,70 0,62 0,20 1,50 1,50
32 1,88 1,82 0,38 0,32 1,50 1,50
33 1,88 1,95 0,38 0,45 1,50 1,50
34 1,88 1,07 0,38 0,43 1,50 1,50
35 0,89 1,17 0,39 0,33 0,50 1,50
36 1,89 1,25 0,39 0,25 1,50 1,50
37 0,92 1,36 0,58 0,14 1,50 1,50
38 0,92 1,50 0,58 0,00 1,50 1,50
39 1,90 1,62 0,40 0,12 1,50 1,50
40 1,91 1,68 0,41 0,18 1,50 1,50
41 1,76 1,70 0,26 0,20 1,50 1,50
42 1,76 1,80 0,26 0,70 1,50 2,50
43 0,76 1,94 0,74 0,44 1,50 1,50
44 1,76 2,06 0,74 0,44 2,50 2,50
45 1,76 1,17 0,26 0,33 1,50 1,50
46 1,76 1,26 0,26 0,24 1,50 1,50
47 1,78 1,39 0,28 0,11 1,50 1,50
48 0,77 1,51 0,27 0,01 0,50 1,50
49 1,80 1,59 0,30 0,09 1,50 1,50
50 0,77 1,69 0,73 0,19 1,50 1,50
51 1,63 0,70 0,13 0,80 1,50 1,50
52 0,64 1,81 0,14 0,31 0,50 1,50
53 1,63 1,98 0,13 0,48 1,50 1,50
54 1,64 1,09 0,14 0,41 1,50 1,50
55 1,63 2,17 0,13 0,33 1,50 2,50

107
56 1,64 1,26 0,14 0,24 1,50 1,50
57 1,63 1,42 0,13 0,08 1,50 1,50
58 1,63 1,55 0,13 0,05 1,50 1,50
59 1,64 1,63 0,14 0,13 1,50 1,50
60 1,64 1,69 0,14 0,19 1,50 1,50
61 0,43 1,69 0,07 0,19 0,50 1,50
62 1,44 1,83 0,06 0,67 1,50 2,50
63 2,45 1,97 0,95 0,47 1,50 1,50
64 1,44 2,10 0,06 0,40 1,50 2,50
65 1,45 1,19 0,05 0,31 1,50 1,50
66 1,43 1,30 0,07 0,20 1,50 1,50
67 1,43 1,40 0,93 0,10 0,50 1,50
68 1,43 2,52 0,07 0,02 1,50 2,50
69 1,44 1,64 0,06 0,14 1,50 1,50
70 1,43 1,69 0,07 0,19 1,50 1,50
71 1,31 1,70 0,19 0,20 1,50 1,50
72 1,31 1,82 0,19 0,32 1,50 1,50
73 1,31 1,98 0,19 0,48 1,50 1,50
74 1,32 1,11 0,18 0,39 1,50 1,50
75 2,32 2,19 0,82 0,69 1,50 1,50
76 1,32 2,20 0,18 0,30 1,50 2,50
77 1,31 2,22 0,19 0,72 1,50 1,50
78 1,32 1,41 0,18 0,09 1,50 1,50
79 1,32 1,51 0,18 0,01 1,50 1,50
80 1,33 1,62 0,17 0,12 1,50 1,50
81 2,33 2,68 0,83 0,18 1,50 2,50

108
Figura C1. Ortoimagens Pancromática Ikonos 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e
ERDAS IMAGINE 9.1.

109
APÊNDICE D
IMAGEM PANCROMÁTICA IKONOS 03
Tabela D1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens Pancromática
Ikonos 03.
Imagem Pancromática Ikonos 03
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 656836,83 7466719,20 656837,00 7466721,00 656837,32 7466717,74 656836,06 7466716,57
2 656908,83 7465292,20 656908,00 7465294,00 656909,30 7465289,89 656910,65 7465288,28
3 656979,83 7463947,20 656979,00 7463949,00 656979,29 7463948,02 656980,28 7463945,53
4 656906,83 7462819,20 656906,00 7462822,00 656907,30 7462819,13 656908,66 7462817,62
5 656932,83 7462090,20 656933,00 7462091,00 656933,30 7462088,20 656934,52 7462086,57
6 656921,83 7461499,20 656921,00 7461502,00 656922,30 7461499,26 656923,58 7461497,75
7 656908,83 7460580,20 656908,00 7460582,00 656909,30 7460578,36 656910,65 7460577,72
8 656834,83 7459337,20 656835,00 7459340,00 656835,32 7459338,48 656837,05 7459335,42
9 656903,83 7458007,20 656904,00 7458009,00 656904,30 7458006,61 656905,68 7458004,61
10 656845,83 7456919,20 656845,00 7456921,00 656846,31 7456918,72 656847,00 7456916,49
11 658645,83 7466669,20 658645,00 7466672,00 658646,03 7466670,75 658647,28 7466667,83
12 658768,83 7465396,20 658768,00 7465398,00 658769,01 7465394,88 658770,61 7465392,72
13 658707,83 7464036,20 658708,00 7464039,00 658708,02 7464037,01 658709,94 7464035,05
14 658707,83 7462591,20 658707,00 7462593,00 658708,02 7462591,15 658708,94 7462588,86
15 658718,83 7461589,20 658718,00 7461591,00 658719,02 7461590,25 658719,88 7461587,27
16 658671,83 7460723,20 658672,00 7460726,00 658672,03 7460723,34 658673,14 7460721,94
17 658772,83 7459797,20 658772,00 7459799,00 658772,01 7459797,43 658773,59 7459795,94
18 658616,83 7458672,20 658617,00 7458674,00 658617,03 7458672,54 658618,43 7458670,02
19 658513,83 7457652,20 658514,00 7457654,00 658514,05 7457651,65 658515,99 7457649,53
20 658503,83 7456814,20 658503,00 7456816,00 658503,05 7456813,73 658505,04 7456812,05
21 661316,83 7466701,20 661317,00 7466703,00 661317,61 7466700,74 661318,85 7466699,66
22 661271,83 7465597,20 661271,00 7465600,00 661271,62 7465598,85 661273,10 7465596,62
23 661239,83 7464509,20 661239,00 7464511,00 661239,62 7464509,96 661240,28 7464507,50
24 661391,83 7463478,20 661392,00 7463480,00 661392,60 7463478,07 661393,45 7463476,07
25 661471,83 7462267,20 661472,00 7462269,00 661472,58 7462266,19 661474,01 7462264,61
26 661351,83 7460616,20 661351,00 7460619,00 661351,60 7460617,35 661352,67 7460615,51
27 661166,83 7459458,20 661166,00 7459460,00 661166,63 7459458,47 661167,67 7459455,77
28 661097,83 7458774,20 661097,00 7458776,00 661097,64 7458772,53 661099,04 7458771,47
29 661088,83 7457581,20 661088,00 7457583,00 661088,65 7457581,65 661090,09 7457578,91
30 661006,83 7456847,20 661007,00 7456849,00 661006,66 7456846,73 661008,53 7456844,87
31 663117,83 7466582,20 663118,00 7466584,00 663118,33 7466581,76 663119,13 7466579,31
32 662805,83 7465476,20 662805,00 7465478,00 662806,37 7465474,87 662807,81 7465473,28
33 663011,83 7464620,20 663011,00 7464622,00 663011,34 7464619,95 663012,71 7464617,90
34 662883,83 7463205,20 662884,00 7463208,00 662884,36 7463206,09 662885,39 7463203,54
35 662868,83 7462153,20 662869,00 7462156,00 662869,36 7462155,20 662870,47 7462152,21
36 662870,83 7461212,20 662871,00 7461214,00 662871,36 7461210,29 662872,46 7461209,31
37 663015,83 7459744,20 663016,00 7459747,00 663016,34 7459744,44 663017,68 7459743,22
38 662859,83 7458840,20 662859,00 7458843,00 662859,37 7458840,53 662860,53 7458839,10

110
39 662861,83 7457955,20 662861,00 7457958,00 662861,37 7457955,62 662862,52 7457953,88
40 662850,83 7457108,20 662850,00 7457110,00 662850,37 7457107,70 662851,58 7457105,46
41 659239,83 7460513,20 659240,00 7460516,00 659239,94 7460514,36 659241,07 7460512,07
Tabela D2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens geradas pelo
K2ORTHO e pelos aplicativos comerciais para a imagem Pancromática Ikonos 03
Imagem Pancromática Ikonos 03
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
1 0,17 1,80 0,49 1,46 0,77 2,63
2 0,83 1,80 0,47 2,31 1,82 3,92
3 0,83 1,80 0,54 0,82 0,45 1,67
4 0,83 2,80 0,47 0,07 1,83 1,58
5 0,17 0,80 0,47 2,00 1,69 3,63
6 0,83 2,80 0,47 0,06 1,75 1,45
7 0,83 1,80 0,47 1,84 1,82 2,48
8 0,17 2,80 0,49 1,28 2,22 1,78
9 0,17 1,80 0,47 0,59 1,85 2,59
10 0,83 1,80 0,48 0,48 1,17 2,71
11 0,83 2,80 0,20 1,55 1,45 1,37
12 0,83 1,80 0,18 1,32 1,78 3,48
13 0,17 2,80 0,19 0,81 2,11 1,15
14 0,83 1,80 0,19 0,05 1,11 2,34
15 0,83 1,80 0,19 1,05 1,05 1,93
16 0,17 2,80 0,20 0,14 1,31 1,26
17 0,83 1,80 0,82 0,23 0,76 1,26
18 0,17 1,80 0,20 0,34 1,60 2,18
19 0,17 1,80 0,22 0,55 2,16 2,67
20 0,83 1,80 0,78 0,47 1,21 2,15
21 0,17 1,80 0,78 0,46 2,02 1,54
22 0,83 2,80 0,21 1,65 1,27 0,58
23 0,83 1,80 0,21 0,76 0,45 1,70
24 0,17 1,80 0,77 0,13 1,62 2,13
25 0,17 1,80 0,75 1,01 2,18 2,59
26 0,83 2,80 0,23 1,15 0,84 0,69
27 0,83 1,80 0,20 0,27 0,84 2,43
28 0,83 1,80 0,19 1,67 1,21 2,73
29 0,83 1,80 0,18 0,45 1,26 2,29
30 0,17 1,80 0,17 0,47 1,70 2,33
31 0,17 1,80 0,50 0,44 1,30 2,89
32 0,83 1,80 0,54 1,33 1,98 2,92
33 0,83 1,80 0,49 0,25 0,88 2,30
34 0,17 2,80 0,53 0,89 1,56 1,66
35 0,17 2,80 0,53 2,00 1,64 0,99
36 0,17 1,80 0,53 1,91 1,63 2,89
37 0,17 2,80 0,51 0,24 1,85 0,98
38 0,83 2,80 0,46 0,33 0,70 1,10
39 0,83 2,80 0,46 0,42 0,69 1,32

111
40 0,83 1,80 0,46 0,50 0,75 2,74
41 0,17 2,80 0,11 1,16 1,24 1,13
.
Tabela D3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 41 CPs para as
ortoimagens Pancromática Ikonos 03 geradas pelos três softwares comerciais.
Imagem Pancromática Ikonos 03 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 0,32 3,26 1,26 1,17 0,94 4,43
2 1,30 4,11 1,35 1,61 2,65 5,72
3 0,29 0,98 0,99 2,49 1,28 3,47
4 1,30 2,87 1,36 1,51 2,66 4,38
5 0,30 2,80 1,22 1,63 1,52 4,43
6 1,30 2,74 1,28 1,51 2,58 4,25
7 1,30 3,64 1,35 0,64 2,65 4,28
8 0,32 1,52 1,73 3,06 2,05 4,58
9 0,30 2,39 1,38 2,00 1,68 4,39
10 1,31 2,28 0,69 2,23 2,00 4,51
11 1,03 1,25 1,25 2,92 2,28 4,17
12 1,01 3,12 1,60 2,16 2,61 5,28
13 0,02 1,99 1,92 1,96 1,94 3,95
14 1,02 1,85 0,92 2,29 1,94 4,14
15 1,02 0,75 0,86 2,98 1,88 3,73
16 0,03 2,66 1,11 1,40 1,14 4,06
17 0,01 1,57 1,58 1,49 1,59 3,06
18 0,03 1,46 1,40 2,52 1,43 3,98
19 0,05 2,35 1,94 2,12 1,99 4,47
20 0,05 2,27 1,99 1,68 2,04 3,95
21 0,61 2,26 1,24 1,08 1,85 3,34
22 0,62 1,15 1,48 2,23 2,10 3,38
23 0,62 1,04 0,66 2,46 1,28 3,50
24 0,60 1,93 0,85 2,00 1,45 3,93
25 0,58 2,81 1,43 1,58 2,01 4,39
26 0,60 1,65 1,07 1,84 1,67 3,49
27 0,63 1,53 1,04 2,70 1,67 4,23
28 0,64 3,47 1,40 1,06 2,04 4,53
29 0,65 1,35 1,44 2,74 2,09 4,09
30 0,34 2,27 1,87 1,86 1,53 4,13
31 0,33 2,24 0,80 2,45 1,13 4,69
32 1,37 3,13 1,44 1,59 2,81 4,72
33 0,34 2,05 1,37 2,05 1,71 4,10
34 0,36 1,91 1,03 2,55 1,39 4,46
35 0,36 0,80 1,11 2,99 1,47 3,79
36 0,36 3,71 1,10 0,98 1,46 4,69
37 0,34 2,56 1,34 1,22 1,68 3,78
38 0,37 2,47 1,16 1,43 1,53 3,90
39 0,37 2,38 1,15 1,74 1,52 4,12
40 0,37 2,30 1,21 2,24 1,58 4,54

112
41 0,06 1,64 1,13 2,29 1,07 3,93
Figura D1. Ortoimagens Pancromática Ikonos 03 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e
ERDAS IMAGINE 9.1.

113
APÊNDICE E
IMAGEM MULTIESPECTRAL QUICKBIRD 00
Tabela E1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens Multiespectral
Quickbird 00.
Imagem Multiespectral Quickbird 00
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 401112,00 7441094,40 401112,00 7441101,60 401110,78 7441103,17 401111,40 7441097,80
2 401193,60 7441101,60 401193,60 7441106,40 401192,37 7441105,57 401195,40 7441102,60
3 401191,20 7439692,80 401191,20 7439692,80 401192,37 7439692,20 401193,00 7439691,40
4 401138,40 7437516,00 401138,40 7437516,00 401139,58 7437515,76 401140,20 7437514,60
5 401512,80 7435248,00 401512,80 7435248,00 401513,92 7435245,73 401514,60 7435244,20
6 401728,80 7433450,40 401728,80 7433450,40 401727,48 7433448,42 401730,60 7433449,00
7 401565,60 7431888,00 401565,60 7431890,40 401566,71 7431888,68 401567,40 7431886,60
8 401481,60 7429898,40 401481,60 7429900,80 401482,72 7429899,40 401483,40 7429897,00
9 401652,00 7428494,40 401654,40 7428494,40 401653,10 7428493,23 401653,80 7428493,00
10 401592,00 7427176,80 401592,00 7427176,80 401593,11 7427175,85 401593,80 7427175,40
11 403478,40 7441171,20 403478,40 7441171,20 403479,20 7441170,36 403480,20 7441169,80
12 403500,00 7439810,40 403500,00 7439810,40 403500,80 7439809,78 403501,80 7439809,00
13 403713,60 7437487,20 403713,60 7437487,20 403714,36 7437484,56 403715,40 7437483,40
14 404335,20 7435816,80 404335,20 7435816,80 404335,86 7435816,83 404337,00 7435815,40
15 404059,20 7434705,60 404059,20 7434705,60 404059,91 7434703,42 404061,00 7434701,80
16 404474,40 7433172,00 404474,40 7433174,40 404472,64 7433172,47 404473,80 7433170,60
17 404200,80 7431600,00 404203,20 7431600,00 404201,48 7431600,72 404202,60 7431598,60
18 404292,00 7430056,80 404294,40 7430059,20 404292,67 7430057,78 404293,80 7430055,40
19 404306,40 7428453,60 404306,40 7428453,60 404307,07 7428452,44 404308,20 7428452,20
20 404496,00 7427263,20 404496,00 7427265,60 404496,63 7427264,63 404497,80 7427261,80
21 406752,00 7441528,80 406752,00 7441531,20 406752,27 7441530,30 406753,80 7441527,40
22 406965,60 7439875,20 406965,60 7439875,20 406965,83 7439874,57 406965,00 7439871,40
23 406776,00 7438384,80 406776,00 7438384,80 406776,26 7438384,41 406777,80 7438383,40
24 407107,20 7436673,60 407107,20 7436673,60 407107,41 7436673,49 407106,60 7436672,20
25 407095,20 7434523,20 407095,20 7434523,20 407095,41 7434523,45 407097,00 7434521,80
26 406936,80 7432980,00 406936,80 7432982,40 406937,04 7432980,50 406938,60 7432978,60
27 406879,20 7431655,20 406879,20 7431655,20 406879,45 7431655,92 406878,60 7431653,80
28 407198,40 7430541,60 407198,40 7430544,00 407198,59 7430542,50 407200,20 7430540,20
29 407088,00 7428525,60 407088,00 7428525,60 407088,21 7428524,43 407087,40 7428524,20
30 407467,20 7427424,00 407467,20 7427426,40 407467,35 7427425,41 407469,00 7427422,60
31 409706,40 7441600,80 409706,40 7441600,80 409706,19 7441602,29 409708,20 7441599,40
32 410020,80 7440012,00 410020,80 7440014,40 410020,54 7440013,75 410020,20 7440010,60
33 409910,40 7437907,20 409910,40 7437907,20 409910,15 7437906,89 409909,80 7437905,80
34 410179,20 7435795,20 410179,20 7435797,60 410178,91 7435795,24 410178,60 7435793,80
35 409663,20 7434206,40 409663,20 7434206,40 409662,99 7434204,30 409665,00 7434202,60
36 410037,60 7432627,20 410037,60 7432627,20 410037,33 7432625,36 410039,40 7432623,40
37 410294,40 7431300,00 410294,40 7431300,00 410294,09 7431300,77 410296,20 7431298,60
38 410090,40 7429723,20 410090,40 7429725,60 410090,12 7429726,63 410092,20 7429721,80

114
39 410032,80 7428091,20 410032,80 7428091,20 410032,53 7428090,10 410034,60 7428089,80
40 409749,60 7427529,60 409749,60 7427529,60 409749,38 7427528,59 409749,00 7427525,80
41 411374,40 7441725,60 411374,40 7441728,00 411373,92 7441727,07 411373,80 7441724,20
42 411177,60 7439426,40 411177,60 7439426,40 411177,15 7439425,84 411177,00 7439422,60
43 411108,00 7437741,60 411108,00 7437741,60 411107,56 7437741,32 411109,80 7437740,20
44 410992,80 7436085,60 410995,20 7436085,60 410994,78 7436085,59 410994,60 7436084,20
45 411266,40 7434693,60 411266,40 7434693,60 411265,93 7434693,82 411268,20 7434692,20
46 411316,80 7433397,60 411316,80 7433397,60 411316,33 7433398,03 411318,60 7433396,20
47 411345,60 7431993,60 411348,00 7431993,60 411347,52 7431994,26 411347,40 7431992,20
48 411741,60 7430606,40 411741,60 7430606,40 411741,06 7430604,89 411743,40 7430602,60
49 411981,60 7429111,20 411981,60 7429111,20 411981,02 7429109,93 411983,40 7429109,80
50 411350,40 7427532,00 411350,40 7427534,40 411349,92 7427533,39 411352,20 7427530,60
51 412562,40 7441783,20 412562,40 7441785,60 412561,72 7441784,66 412564,20 7441781,80
52 412408,80 7439553,60 412408,80 7439553,60 412408,15 7439553,02 412410,60 7439552,20
53 412425,60 7438720,80 412425,60 7438720,80 412424,94 7438717,96 412427,40 7438717,00
54 412303,20 7436236,80 412303,20 7436239,20 412302,56 7436236,76 412305,00 7436235,40
55 412310,40 7435233,60 412310,40 7435233,60 412309,76 7435233,73 412309,80 7435232,20
56 411948,00 7433304,00 411948,00 7433306,40 411947,42 7433304,45 411947,40 7433302,60
57 412029,60 7432015,20 412032,00 7432015,20 412031,41 7432015,86 412031,40 7432013,80
58 412118,40 7430704,80 412118,40 7430704,80 412117,79 7430705,67 412120,20 7430703,40
59 412228,80 7428883,20 412228,80 7428885,60 412228,18 7428884,37 412228,20 7428881,80
60 411842,40 7427704,80 411842,40 7427704,80 411841,84 7427706,16 411844,20 7427701,00
61 414645,60 7441864,80 414645,60 7441867,20 414644,58 7441866,24 414647,40 7441863,40
62 414388,80 7440420,00 414388,80 7440420,00 414387,83 7440419,28 414390,60 7440418,60
63 414535,20 7438020,00 414535,20 7438020,00 414534,20 7438019,67 414534,60 7438018,60
64 414940,80 7436949,60 414940,80 7436952,00 414939,74 7436949,45 414940,20 7436948,20
65 414597,60 7435243,20 414597,60 7435243,20 414596,59 7435243,33 414599,40 7435241,80
66 414760,80 7433764,80 414760,80 7433764,80 414762,16 7433762,77 414762,60 7433761,00
67 415106,40 7432130,40 415106,40 7432128,00 415107,71 7432128,64 415108,20 7432126,60
68 415010,40 7430812,80 415010,40 7430815,20 415009,32 7430816,05 415012,20 7430811,40
69 414808,80 7429387,20 414808,80 7429387,20 414807,76 7429388,29 414808,20 7429385,80
70 414657,60 7427625,60 414657,60 7427625,60 414658,98 7427624,58 414659,40 7427624,20
71 414986,40 7441747,20 414986,40 7441749,60 414985,33 7441748,66 414988,20 7441745,80
72 415423,20 7440506,40 415423,20 7440506,40 415422,06 7440505,67 415425,00 7440505,00
73 415437,60 7438276,80 415437,60 7438276,80 415436,46 7438276,43 415437,00 7438273,00
74 415456,80 7437196,80 415456,80 7437196,80 415458,05 7437196,61 415458,60 7437193,00
75 415432,80 7435543,20 415432,80 7435543,20 415431,66 7435540,88 415432,20 7435539,40
76 415485,60 7434211,20 415485,60 7434211,20 415486,85 7434211,50 415487,40 7434209,80
77 415478,40 7432917,60 415478,40 7432920,00 415477,25 7432918,11 415480,20 7432916,20
78 415526,40 7430179,20 415526,40 7430181,60 415527,64 7430182,56 415528,20 7430180,20
79 415548,00 7428688,80 415548,00 7428688,80 415546,84 7428687,60 415547,40 7428687,40
80 415545,60 7427647,20 415545,60 7427647,20 415546,84 7427646,17 415547,40 7427643,40
81 401419,20 7441312,80 401419,20 7441315,20 401420,33 7441314,33 401421,00 7441313,80
Tabela E2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens Multiespectral
Quickbird 00 geradas pelo K2ORTHO e pelos aplicativos comerciais.
Imagem Multiespectral Quickbird 00
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS

115
E N E N E N
1 0,00 7,20 1,22 8,77 0,60 3,40
2 0,00 4,80 1,23 3,97 1,80 1,00
3 0,00 0,00 1,17 0,60 1,80 1,40
4 0,00 0,00 1,18 0,24 1,80 1,40
5 0,00 0,00 1,12 2,27 1,80 3,80
6 0,00 0,00 1,32 1,98 1,80 1,40
7 0,00 2,40 1,11 0,68 1,80 1,40
8 0,00 2,40 1,12 1,00 1,80 1,40
9 2,40 0,00 1,10 1,17 1,80 1,40
10 0,00 0,00 1,11 0,95 1,80 1,40
11 0,00 0,00 0,80 0,84 1,80 1,40
12 0,00 0,00 0,80 0,62 1,80 1,40
13 0,00 0,00 0,76 2,64 1,80 3,80
14 0,00 0,00 0,66 0,03 1,80 1,40
15 0,00 0,00 0,71 2,18 1,80 3,80
16 0,00 2,40 1,76 0,47 0,60 1,40
17 2,40 0,00 0,68 0,72 1,80 1,40
18 2,40 2,40 0,67 0,98 1,80 1,40
19 0,00 0,00 0,67 1,16 1,80 1,40
20 0,00 2,40 0,63 1,43 1,80 1,40
21 0,00 2,40 0,27 1,50 1,80 1,40
22 0,00 0,00 0,23 0,63 0,60 3,80
23 0,00 0,00 0,26 0,39 1,80 1,40
24 0,00 0,00 0,21 0,11 0,60 1,40
25 0,00 0,00 0,21 0,25 1,80 1,40
26 0,00 2,40 0,24 0,50 1,80 1,40
27 0,00 0,00 0,25 0,72 0,60 1,40
28 0,00 2,40 0,19 0,90 1,80 1,40
29 0,00 0,00 0,21 1,17 0,60 1,40
30 0,00 2,40 0,15 1,41 1,80 1,40
31 0,00 0,00 0,21 1,49 1,80 1,40
32 0,00 2,40 0,26 1,75 0,60 1,40
33 0,00 0,00 0,25 0,31 0,60 1,40
34 0,00 2,40 0,29 0,04 0,60 1,40
35 0,00 0,00 0,21 2,10 1,80 3,80
36 0,00 0,00 0,27 1,84 1,80 3,80
37 0,00 0,00 0,31 0,77 1,80 1,40
38 0,00 2,40 0,28 3,43 1,80 1,40
39 0,00 0,00 0,27 1,10 1,80 1,40
40 0,00 0,00 0,22 1,01 0,60 3,80
41 0,00 2,40 0,48 1,47 0,60 1,40
42 0,00 0,00 0,45 0,56 0,60 3,80
43 0,00 0,00 0,44 0,28 1,80 1,40
44 2,40 0,00 1,98 0,01 1,80 1,40
45 0,00 0,00 0,47 0,22 1,80 1,40
46 0,00 0,00 0,47 0,43 1,80 1,40
47 2,40 0,00 1,92 0,66 1,80 1,40

116
48 0,00 0,00 0,54 1,51 1,80 3,80
49 0,00 0,00 0,58 1,27 1,80 1,40
50 0,00 2,40 0,48 1,39 1,80 1,40
51 0,00 2,40 0,68 1,46 1,80 1,40
52 0,00 0,00 0,65 0,58 1,80 1,40
53 0,00 0,00 0,66 2,84 1,80 3,80
54 0,00 2,40 0,64 0,04 1,80 1,40
55 0,00 0,00 0,64 0,13 0,60 1,40
56 0,00 2,40 0,58 0,45 0,60 1,40
57 2,40 0,00 1,81 0,66 1,80 1,40
58 0,00 0,00 0,61 0,87 1,80 1,40
59 0,00 2,40 0,62 1,17 0,60 1,40
60 0,00 0,00 0,56 1,36 1,80 3,80
61 0,00 2,40 1,02 1,44 1,80 1,40
62 0,00 0,00 0,97 0,72 1,80 1,40
63 0,00 0,00 1,00 0,33 0,60 1,40
64 0,00 2,40 1,06 0,15 0,60 1,40
65 0,00 0,00 1,01 0,13 1,80 1,40
66 0,00 0,00 1,36 2,03 1,80 3,80
67 0,00 2,40 1,31 1,76 1,80 3,80
68 0,00 2,40 1,08 3,25 1,80 1,40
69 0,00 0,00 1,04 1,09 0,60 1,40
70 0,00 0,00 1,38 1,02 1,80 1,40
71 0,00 2,40 1,07 1,46 1,80 1,40
72 0,00 0,00 1,14 0,73 1,80 1,40
73 0,00 0,00 1,14 0,37 0,60 3,80
74 0,00 0,00 1,25 0,19 1,80 3,80
75 0,00 0,00 1,14 2,32 0,60 3,80
76 0,00 0,00 1,25 0,30 1,80 1,40
77 0,00 2,40 1,15 0,51 1,80 1,40
78 0,00 2,40 1,24 3,36 1,80 1,00
79 0,00 0,00 1,16 1,20 0,60 1,40
80 0,00 0,00 1,24 1,03 1,80 3,80
81 0,00 2,40 1,13 1,53 1,80 1,00
Tabela E3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 81 CPs para as
ortoimagens Multiespectral Quickbird 00 geradas pelos três softwares comerciais.
Imagem Multiespectral Quickbird 00 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 1,22 1,57 0,62 5,37 0,60 3,80
2 1,23 0,83 3,03 2,97 1,80 3,80
3 1,17 0,60 0,63 0,80 1,80 1,40
4 1,18 0,24 0,62 1,16 1,80 1,40
5 1,12 2,27 0,68 1,53 1,80 3,80
6 1,32 1,98 3,12 0,58 1,80 1,40
7 1,11 1,72 0,69 2,08 1,80 3,80
8 1,12 1,40 0,68 2,40 1,80 3,80

117
9 1,30 1,17 0,70 0,23 0,60 1,40
10 1,11 0,95 0,69 0,45 1,80 1,40
11 0,80 0,84 1,00 0,56 1,80 1,40
12 0,80 0,62 1,00 0,78 1,80 1,40
13 0,76 2,64 1,04 1,16 1,80 3,80
14 0,66 0,03 1,14 1,43 1,80 1,40
15 0,71 2,18 1,09 1,62 1,80 3,80
16 1,76 1,93 1,16 1,87 0,60 3,80
17 1,72 0,72 1,12 2,12 0,60 1,40
18 1,73 1,42 1,13 2,38 0,60 3,80
19 0,67 1,16 1,13 0,24 1,80 1,40
20 0,63 0,97 1,17 2,83 1,80 3,80
21 0,27 0,90 1,53 2,90 1,80 3,80
22 0,23 0,63 0,83 3,17 0,60 3,80
23 0,26 0,39 1,54 1,01 1,80 1,40
24 0,21 0,11 0,81 1,29 0,60 1,40
25 0,21 0,25 1,59 1,65 1,80 1,40
26 0,24 1,90 1,56 1,90 1,80 3,80
27 0,25 0,72 0,85 2,12 0,60 1,40
28 0,19 1,50 1,61 2,30 1,80 3,80
29 0,21 1,17 0,81 0,23 0,60 1,40
30 0,15 0,99 1,65 2,81 1,80 3,80
31 0,21 1,49 2,01 2,89 1,80 1,40
32 0,26 0,65 0,34 3,15 0,60 3,80
33 0,25 0,31 0,35 1,09 0,60 1,40
34 0,29 2,36 0,31 1,44 0,60 3,80
35 0,21 2,10 2,01 1,70 1,80 3,80
36 0,27 1,84 2,07 1,96 1,80 3,80
37 0,31 0,77 2,11 2,17 1,80 1,40
38 0,28 1,03 2,08 4,83 1,80 3,80
39 1,80 1,40 0,00 0,00 1,80 1,40
40 0,22 1,01 0,38 2,79 0,60 3,80
41 0,48 0,93 0,12 2,87 0,60 3,80
42 0,45 0,56 0,15 3,24 0,60 3,80
43 0,44 0,28 2,24 1,12 1,80 1,40
44 0,42 0,01 0,18 1,39 0,60 1,40
45 0,47 0,22 2,27 1,62 1,80 1,40
46 0,47 0,43 2,27 1,83 1,80 1,40
47 0,48 0,66 0,12 2,06 0,60 1,40
48 0,54 1,51 2,34 2,29 1,80 3,80
49 0,58 1,27 2,38 0,13 1,80 1,40
50 0,48 1,01 2,28 2,79 1,80 3,80
51 0,68 0,94 2,48 2,86 1,80 3,80
52 0,65 0,58 2,45 0,82 1,80 1,40
53 0,66 2,84 2,46 0,96 1,80 3,80
54 0,64 2,44 2,44 1,36 1,80 3,80
55 0,64 0,13 0,04 1,53 0,60 1,40
56 0,58 1,95 0,02 1,85 0,60 3,80

118
57 0,59 0,66 0,01 2,06 0,60 1,40
58 0,61 0,87 2,41 2,27 1,80 1,40
59 0,62 1,23 0,02 2,57 0,60 3,80
60 0,56 1,36 2,36 5,16 1,80 3,80
61 1,02 0,96 2,82 2,84 1,80 3,80
62 0,97 0,72 2,77 0,68 1,80 1,40
63 1,00 0,33 0,40 1,07 0,60 1,40
64 1,06 2,55 0,46 1,25 0,60 3,80
65 1,01 0,13 2,81 1,53 1,80 1,40
66 1,36 2,03 0,44 1,77 1,80 3,80
67 1,31 0,64 0,49 2,04 1,80 1,40
68 1,08 0,85 2,88 4,65 1,80 3,80
69 1,04 1,09 0,44 2,49 0,60 1,40
70 1,38 1,02 0,42 0,38 1,80 1,40
71 1,07 0,94 2,87 2,86 1,80 3,80
72 1,14 0,73 2,94 0,67 1,80 1,40
73 1,14 0,37 0,54 3,43 0,60 3,80
74 1,25 0,19 0,55 3,61 1,80 3,80
75 1,14 2,32 0,54 1,48 0,60 3,80
76 1,25 0,30 0,55 1,70 1,80 1,40
77 1,15 1,89 2,95 1,91 1,80 3,80
78 1,24 0,96 0,56 2,36 1,80 1,40
79 1,16 1,20 0,56 0,20 0,60 1,40
80 1,24 1,03 0,56 2,77 1,80 3,80
81 1,13 0,87 0,67 0,53 1,80 1,40

119
Figura E1. Ortoimagens Multiespectral Quickbird 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI
4.3 e ERDAS IMAGINE 9.1

120
APÊNDICE F
IMAGEM MULTIESPECTRAL QUICKBIRD 01
Tabela F1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens Multiespectral
Quickbird 01.
Imagem Multiespectral Quickbird 01
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 409140,00 7441617,60 409140,00 7441617,60 409140,97 7441616,35 409142,40 7441617,40
2 409257,60 7440048,00 409257,60 7440048,00 409256,13 7440047,01 409260,00 7440047,80
3 409147,20 7438735,20 409147,20 7438735,20 409148,17 7438736,83 409149,60 7438735,00
4 409171,20 7436272,80 409173,60 7436272,80 409174,56 7436272,44 409176,00 7436272,60
5 409624,80 7434950,40 409627,20 7434950,40 409628,02 7434950,26 409629,60 7434950,20
6 409399,20 7433373,60 409401,60 7433373,60 409402,49 7433373,72 409404,00 7433373,40
7 409363,20 7432135,20 409368,00 7432135,20 409368,90 7432135,53 409370,40 7432132,60
8 409437,60 7430810,40 409440,00 7430808,00 409440,87 7430808,55 409444,80 7430807,80
9 409269,60 7428657,60 409274,40 7428657,60 409277,72 7428656,10 409279,20 7428657,40
10 409339,20 7427508,00 409344,00 7427508,00 409344,90 7427506,69 409348,80 7427507,80
11 411446,40 7441704,00 411444,00 7441704,00 411444,25 7441705,14 411446,40 7441703,80
12 411672,00 7440518,40 411669,60 7440518,40 411672,18 7440519,73 411674,40 7440518,20
13 411456,00 7438641,60 411456,00 7438641,60 411456,25 7438643,24 411458,40 7438641,40
14 411835,20 7436995,20 411837,60 7436995,20 411837,73 7436994,72 411840,00 7436995,00
15 411631,20 7435178,40 411631,20 7435178,40 411633,79 7435178,22 411636,00 7435178,20
16 411715,20 7433820,00 411715,20 7433820,00 411717,77 7433820,05 411720,00 7433817,40
17 412027,20 7432012,80 412029,60 7432012,80 412029,67 7432013,15 412032,00 7432012,60
18 411964,80 7429915,20 411967,20 7429915,20 411969,69 7429915,89 411972,00 7429915,00
19 412430,40 7428607,20 412432,80 7428607,20 412435,14 7428608,11 412437,60 7428607,00
20 412195,20 7427750,40 412197,60 7427750,40 412197,62 7427751,45 412202,40 7427750,20
21 414350,40 7441708,80 414348,00 7441708,80 414349,75 7441707,54 414352,80 7441708,60
22 414014,40 7439788,80 414014,40 7439788,80 414016,25 7439790,25 414016,80 7439788,60
23 414016,80 7438142,40 414016,80 7438142,40 414018,65 7438144,13 414019,20 7438142,20
24 414235,20 7436469,60 414235,20 7436469,60 414236,99 7436469,21 414237,60 7436469,40
25 414127,20 7434583,20 414129,60 7434583,20 414129,02 7434583,12 414132,00 7434583,00
26 414220,80 7433536,80 414220,80 7433536,80 414220,19 7433536,89 414223,20 7433536,60
27 414388,80 7431216,00 414388,80 7431216,00 414390,54 7431216,48 414393,60 7431215,80
28 414194,40 7430239,20 414194,40 7430239,20 414196,20 7430239,84 414196,80 7430239,00
29 413949,60 7428619,20 413952,00 7428619,20 413951,47 7428620,11 413954,40 7428619,00
30 414650,40 7427664,00 414652,80 7427664,00 414654,46 7427665,07 414655,20 7427663,80
31 415972,80 7441521,60 415970,40 7441521,60 415971,65 7441522,77 415972,80 7441521,40
32 416023,20 7440516,00 416020,80 7440516,00 416022,03 7440517,33 416025,60 7440515,80
33 415936,80 7438363,20 415936,80 7438363,20 415938,06 7438362,49 415939,20 7438363,00
34 416020,80 7436680,80 416020,80 7436680,80 416022,03 7436680,37 416023,20 7436680,60
35 416246,40 7435632,00 416246,40 7435632,00 416245,16 7435631,74 416248,80 7435631,80
36 416378,40 7434247,20 416378,40 7434247,20 416377,12 7434247,17 416380,80 7434247,00
37 416565,60 7432077,60 416563,20 7432077,60 416561,86 7432077,93 416565,60 7432077,40
38 416520,00 7430522,40 416520,00 7430522,40 416518,68 7430522,99 416522,40 7430522,20

121
39 416460,00 7428979,20 416460,00 7428979,20 416461,10 7428980,05 416462,40 7428979,00
40 416779,20 7427774,40 416776,80 7427772,00 416777,80 7427773,05 416779,20 7427771,80
41 410352,00 7441111,20 410349,60 7441111,20 410350,19 7441112,43 410354,40 7441111,00
Tabela F2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens geradas pelo
K2ORTHO e pelos aplicativos comerciais para a imagem Multiespectral Quickbird 01.
Imagem Multiespectral Quickbird 01
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
1 0,00 0,00 0,97 1,25 2,40 0,20
2 0,00 0,00 1,47 0,99 2,40 0,20
3 0,00 0,00 0,97 1,63 2,40 0,20
4 2,40 0,00 3,36 0,36 4,80 0,20
5 2,40 0,00 3,22 0,14 4,80 0,20
6 2,40 0,00 3,29 0,12 4,80 0,20
7 4,80 0,00 5,70 0,33 7,20 2,60
8 2,40 2,40 3,27 1,85 7,20 2,60
9 4,80 0,00 8,12 1,50 9,60 0,20
10 4,80 0,00 5,70 1,31 9,60 0,20
11 2,40 0,00 2,15 1,14 0,00 0,20
12 2,40 0,00 0,18 1,33 2,40 0,20
13 0,00 0,00 0,25 1,64 2,40 0,20
14 2,40 0,00 2,53 0,48 4,80 0,20
15 0,00 0,00 2,59 0,18 4,80 0,20
16 0,00 0,00 2,57 0,05 4,80 2,60
17 2,40 0,00 2,47 0,35 4,80 0,20
18 2,40 0,00 4,89 0,69 7,20 0,20
19 2,40 0,00 4,74 0,91 7,20 0,20
20 2,40 0,00 2,42 1,05 7,20 0,20
21 2,40 0,00 0,65 1,26 2,40 0,20
22 0,00 0,00 1,85 1,45 2,40 0,20
23 0,00 0,00 1,85 1,73 2,40 0,20
24 0,00 0,00 1,79 0,39 2,40 0,20
25 2,40 0,00 1,82 0,08 4,80 0,20
26 0,00 0,00 0,61 0,09 2,40 0,20
27 0,00 0,00 1,74 0,48 4,80 0,20
28 0,00 0,00 1,80 0,64 2,40 0,20
29 2,40 0,00 1,87 0,91 4,80 0,20
30 2,40 0,00 4,06 1,07 4,80 0,20
31 2,40 0,00 1,15 1,17 0,00 0,20
32 2,40 0,00 1,17 1,33 2,40 0,20
33 0,00 0,00 1,26 0,71 2,40 0,20
34 0,00 0,00 1,23 0,43 2,40 0,20
35 0,00 0,00 1,24 0,26 2,40 0,20
36 0,00 0,00 1,28 0,03 2,40 0,20
37 2,40 0,00 3,74 0,33 0,00 0,20
38 0,00 0,00 1,32 0,59 2,40 0,20
39 0,00 0,00 1,10 0,85 2,40 0,20

122
40 2,40 2,40 1,40 1,35 0,00 2,60
41 2,40 0,00 1,81 1,23 2,40 0,20
Tabela F3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 41 CPs para as
ortoimagens Multiespectral Quickbird 01 geradas pelos três softwares comerciais.
Imagem Multiespectral Quickbird 01 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 0,97 1,25 1,43 1,05 2,40 0,20
2 1,47 0,99 3,87 0,79 2,40 0,20
3 0,97 1,63 1,43 1,83 2,40 0,20
4 0,96 0,36 1,44 0,16 2,40 0,20
5 0,82 0,14 1,58 0,06 2,40 0,20
6 0,89 0,12 1,51 0,32 2,40 0,20
7 0,90 0,33 1,50 2,93 2,40 2,60
8 0,87 0,55 3,93 0,75 4,80 0,20
9 3,32 1,50 1,48 1,30 4,80 0,20
10 0,90 1,31 3,90 1,11 4,80 0,20
11 0,25 1,14 2,15 1,34 2,40 0,20
12 2,58 1,33 2,22 1,53 4,80 0,20
13 0,25 1,64 2,15 1,84 2,40 0,20
14 0,13 0,48 2,27 0,28 2,40 0,20
15 2,59 0,18 2,21 0,02 4,80 0,20
16 2,57 0,05 2,23 2,65 4,80 2,60
17 0,07 0,35 2,33 0,55 2,40 0,20
18 2,49 0,69 2,31 0,89 4,80 0,20
19 2,34 0,91 2,46 1,11 4,80 0,20
20 0,02 1,05 4,78 1,25 4,80 0,20
21 1,75 1,26 3,05 1,06 4,80 0,20
22 1,85 1,45 0,55 1,65 2,40 0,20
23 1,85 1,73 0,55 1,93 2,40 0,20
24 1,79 0,39 0,61 0,19 2,40 0,20
25 0,58 0,08 2,98 0,12 2,40 0,20
26 0,61 0,09 3,01 0,29 2,40 0,20
27 1,74 0,48 3,06 0,68 4,80 0,20
28 1,80 0,64 0,60 0,84 2,40 0,20
29 0,53 0,91 2,93 1,11 2,40 0,20
30 1,66 1,07 0,74 1,27 2,40 0,20
31 1,25 1,17 1,15 1,37 2,40 0,20
32 1,23 1,33 3,57 1,53 4,80 0,20
33 1,26 0,71 1,14 0,51 2,40 0,20
34 1,23 0,43 1,17 0,23 2,40 0,20
35 1,24 0,26 3,64 0,06 2,40 0,20
36 1,28 0,03 3,68 0,17 2,40 0,20
37 1,34 0,33 3,74 0,53 2,40 0,20
38 1,32 0,59 3,72 0,79 2,40 0,20
39 1,10 0,85 1,30 1,05 2,40 0,20
40 1,00 1,05 1,40 1,25 2,40 0,20

123
41 0,59 1,23 4,21 1,43 4,80 0,20
Figura F1. Ortoimagens Multiespectral Quickbird 01 a partir do K2ORTHO, PCI Geomática 9.0, ENVI
4.3 e ERDAS IMAGINE 9.1.

124
APÊNDICE G
IMAGEM PANCROMÁTICA QUICKBIRD 00
Tabela G1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens Pancromática
Quickbird 00.
Imagem Pancromática Quickbird 00
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 400996,20 7441254,60 400996,20 7441257,60 400996,51 7441259,96 400997,70 7441255,58
2 401192,40 7439677,20 401192,40 7439677,80 401192,70 7439676,63 401193,35 7439674,81
3 401137,80 7437811,80 401137,80 7437814,80 401138,10 7437815,51 401138,73 7437812,58
4 401292,60 7436592,60 401292,60 7436593,20 401292,90 7436592,16 401293,57 7436590,69
5 401265,00 7435116,00 401265,00 7435117,20 401265,30 7435116,22 401265,96 7435114,35
6 401366,40 7433667,60 401366,40 7433668,20 401366,69 7433667,28 401367,39 7433665,61
7 401406,00 7431798,60 401406,60 7431799,80 401406,29 7431798,96 401407,60 7431796,77
8 401464,20 7430167,80 401464,20 7430168,40 401463,89 7430167,62 401465,21 7430165,59
9 401530,80 7428667,80 401530,80 7428669,00 401530,49 7428667,69 401531,83 7428666,44
10 401593,20 7427176,80 401593,20 7427178,00 401593,49 7427176,75 401594,24 7427175,09
11 402978,00 7441371,00 402978,00 7441371,60 402977,63 7441370,96 402978,77 7441369,01
12 403152,00 7439845,80 403152,00 7439847,60 403152,22 7439848,22 403152,81 7439845,25
13 403194,60 7438170,00 403194,60 7438170,60 403194,22 7438170,09 403195,42 7438167,86
14 403211,40 7436328,00 403211,40 7436328,60 403211,62 7436327,57 403212,82 7436327,23
15 403416,60 7434301,20 403416,60 7434301,80 403416,81 7434300,85 403417,47 7434298,76
16 403524,00 7432455,00 403524,00 7432455,60 403524,21 7432454,73 403524,89 7432453,32
17 403526,40 7431229,80 403526,40 7431230,40 403526,61 7431229,58 403527,29 7431227,84
18 403650,00 7429852,20 403650,00 7429852,80 403649,60 7429852,04 403650,92 7429849,92
19 403869,00 7428598,80 403869,00 7428598,20 403869,20 7428596,89 403869,97 7428595,62
20 403837,80 7427303,40 403837,80 7427304,00 403837,40 7427303,34 403838,77 7427301,72
21 404610,60 7441377,00 404610,60 7441378,20 404610,77 7441379,36 404611,15 7441375,61
22 404640,00 7439994,60 404640,00 7439995,20 404639,57 7439994,02 404640,55 7439992,29
23 404617,80 7438673,40 404617,80 7438675,20 404617,97 7438674,67 404618,95 7438672,58
24 404806,80 7436708,40 404806,80 7436709,00 404806,96 7436707,95 404807,99 7436706,52
25 404675,40 7435249,20 404675,40 7435250,40 404674,96 7435250,01 404675,96 7435247,58
26 404716,20 7433719,80 404716,80 7433721,00 404716,36 7433720,68 404717,37 7433718,42
27 404750,40 7432384,20 404750,40 7432384,80 404750,56 7432383,93 404751,58 7432381,91
28 404874,60 7431091,80 404874,60 7431091,20 404874,76 7431089,19 404875,81 7431088,60
29 405217,80 7429177,20 405217,80 7429179,00 405217,94 7429178,87 405219,09 7429175,96
30 405211,80 7427347,80 405211,80 7427348,40 405211,94 7427347,74 405213,09 7427346,13
31 406478,40 7441380,60 406478,40 7441381,80 406478,49 7441381,76 406479,38 7441379,81
32 406617,00 7439979,60 406617,00 7439982,00 406617,09 7439982,62 406618,02 7439979,68
33 406569,60 7438659,60 406569,60 7438659,60 406569,09 7438657,87 406570,61 7438657,58
34 406581,60 7435975,20 406582,20 7435976,40 406581,69 7435975,38 406582,61 7435973,75
35 406538,40 7434068,40 406538,40 7434069,00 406538,49 7434068,66 406539,40 7434066,50
36 406728,00 7432726,20 406728,00 7432726,80 406728,08 7432725,92 406729,04 7432723,99
37 406801,20 7431218,40 406801,20 7431219,60 406801,28 7431218,78 406802,26 7431217,04
38 406836,00 7429873,20 406836,00 7429874,40 406836,08 7429873,64 406837,07 7429871,52
39 406816,80 7428540,60 406816,80 7428540,60 406816,88 7428540,49 406817,86 7428538,01

125
40 406783,20 7427342,40 406783,20 7427343,00 406783,28 7427341,74 406784,26 7427340,13
41 409005,60 7441571,40 409005,60 7441572,60 409005,59 7441570,15 409006,58 7441568,86
42 409411,80 7439832,00 409411,80 7439832,60 409411,78 7439832,62 409412,87 7439830,25
43 409374,00 7437414,60 409374,00 7437415,20 409373,98 7437414,72 409375,06 7437412,88
44 409369,80 7435933,80 409369,80 7435935,60 409369,78 7435935,19 409370,86 7435932,94
45 409285,20 7434423,60 409285,20 7434424,80 409285,18 7434425,05 409286,24 7434421,78
46 409431,00 7432985,40 409431,00 7432986,60 409430,97 7432986,31 409432,07 7432983,85
47 409560,60 7431753,00 409560,60 7431754,20 409560,57 7431753,36 409561,70 7431751,16
48 409427,40 7430157,00 409427,40 7430158,20 409427,38 7430157,43 409428,47 7430155,39
49 409474,80 7428643,20 409474,80 7428643,80 409474,77 7428643,09 409475,88 7428641,23
50 409600,20 7427440,80 409600,80 7427442,00 409600,17 7427440,74 409601,31 7427439,15
51 411380,40 7441677,00 411380,40 7441678,20 411380,30 7441677,55 411381,33 7441675,68
52 411404,40 7440219,00 411405,00 7440220,20 411404,90 7440219,61 411405,34 7440217,34
53 411429,60 7438044,60 411429,60 7438045,20 411429,50 7438044,70 411430,54 7438043,03
54 411292,20 7436297,40 411292,20 7436298,00 411292,10 7436296,97 411293,11 7436295,42
55 411484,20 7434629,40 411484,20 7434630,60 411484,09 7434630,24 411485,15 7434628,23
56 411524,40 7433536,20 411525,00 7433536,80 411524,89 7433536,49 411525,96 7433534,18
57 411522,60 7431658,80 411522,60 7431659,40 411522,49 7431658,56 411523,56 7431656,94
58 411676,80 7430177,40 411677,40 7430177,40 411676,69 7430176,62 411677,80 7430175,19
59 411725,40 7428739,80 411725,40 7428739,80 411725,28 7428737,88 411726,41 7428736,65
60 411739,20 7427543,40 411739,20 7427543,40 411739,08 7427542,73 411740,21 7427541,18
61 413607,60 7441665,60 413607,60 7441666,80 413607,41 7441666,15 413608,45 7441663,68
62 413717,40 7440558,60 413717,40 7440559,20 413717,20 7440557,99 413718,88 7440557,02
63 413745,00 7438552,20 413745,00 7438553,40 413744,80 7438552,28 413745,88 7438550,75
64 413634,60 7436759,40 413634,60 7436760,00 413634,41 7436758,95 413635,46 7436756,93
65 413723,40 7435052,40 413724,00 7435053,00 413723,80 7435052,02 413724,88 7435050,13
66 413751,60 7433276,40 413751,60 7433277,60 413751,40 7433277,90 413752,49 7433274,92
67 413817,60 7431663,60 413817,60 7431664,80 413817,40 7431663,96 413818,50 7431662,34
68 413809,20 7430463,00 413809,20 7430463,60 413809,00 7430463,41 413810,10 7430461,46
69 413783,40 7429027,80 413784,00 7429029,00 413783,80 7429028,27 413784,89 7429025,92
70 413889,60 7427638,80 413889,60 7427638,20 413889,40 7427636,33 413890,52 7427635,40
71 415276,20 7441834,20 415276,80 7441834,80 415276,54 7441834,14 415277,44 7441831,72
72 415422,00 7440558,00 415422,00 7440558,60 415421,74 7440557,99 415422,68 7440556,42
73 415443,00 7438798,80 415443,00 7438799,40 415442,74 7438798,27 415444,28 7438796,81
74 415413,00 7436875,80 415413,00 7436876,40 415413,34 7436875,35 415414,27 7436873,36
75 415369,80 7434814,80 415369,80 7434816,00 415369,54 7434815,03 415370,46 7434813,08
76 415495,20 7433473,20 415495,20 7433473,80 415494,93 7433472,29 415495,89 7433471,16
77 415429,80 7431831,60 415430,40 7431832,20 415430,14 7431830,76 415431,08 7431829,18
78 415444,80 7430466,00 415444,80 7430468,40 415445,14 7430469,41 415446,08 7430465,66
79 415536,60 7429068,00 415536,60 7429068,00 415536,33 7429067,27 415537,30 7429065,53
80 415549,80 7427646,60 415549,80 7427646,60 415549,53 7427645,33 415550,51 7427643,80
81 414603,60 7427633,40 414603,60 7427634,60 414603,37 7427633,33 414604,68 7427631,80
Tabela G2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens Pancromática
Quickbird 00 geradas pelo K2ORTHO e pelos aplicativos comerciais.
Imagem Pancromática Quickbird 00
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS

126
E N E N E N
1 0,00 3,00 0,31 5,36 1,50 0,98
2 0,00 0,60 0,30 0,57 0,95 2,39
3 0,00 3,00 0,30 3,71 0,93 0,78
4 0,00 0,60 0,30 0,44 0,97 1,91
5 0,00 1,20 0,30 0,22 0,96 1,65
6 0,00 0,60 0,29 0,32 0,99 1,99
7 0,60 1,20 0,29 0,36 1,60 1,83
8 0,00 0,60 0,31 0,18 1,01 2,21
9 0,00 1,20 0,31 0,11 1,03 1,36
10 0,00 1,20 0,29 0,05 1,04 1,71
11 0,00 0,60 0,37 0,04 0,77 1,99
12 0,00 1,80 0,22 2,42 0,81 0,55
13 0,00 0,60 0,38 0,09 0,82 2,14
14 0,00 0,60 0,22 0,43 1,42 0,77
15 0,00 0,60 0,21 0,35 0,87 2,44
16 0,00 0,60 0,21 0,27 0,89 1,68
17 0,00 0,60 0,21 0,22 0,89 1,96
18 0,00 0,60 0,40 0,16 0,92 2,28
19 0,00 0,60 0,20 1,91 0,97 3,18
20 0,00 0,60 0,40 0,06 0,97 1,68
21 0,00 1,20 0,17 2,36 0,55 1,39
22 0,00 0,60 0,43 0,58 0,55 2,31
23 0,00 1,80 0,17 1,27 1,15 0,82
24 0,00 0,60 0,16 0,45 1,19 1,88
25 0,00 1,20 0,44 0,81 0,56 1,62
26 0,60 1,20 0,16 0,88 1,17 1,38
27 0,00 0,60 0,16 0,27 1,18 2,29
28 0,00 0,60 0,16 2,61 1,21 3,20
29 0,00 1,80 0,14 1,67 1,29 1,24
30 0,00 0,60 0,14 0,06 1,29 1,67
31 0,00 1,20 0,09 1,16 0,98 0,79
32 0,00 2,40 0,09 3,02 1,02 0,08
33 0,00 0,00 0,51 1,73 1,01 2,02
34 0,60 1,20 0,09 0,18 1,01 1,45
35 0,00 0,60 0,09 0,26 1,00 1,90
36 0,00 0,60 0,08 0,28 1,04 2,21
37 0,00 1,20 0,08 0,38 1,06 1,36
38 0,00 1,20 0,08 0,44 1,07 1,68
39 0,00 0,00 0,08 0,11 1,06 2,59
40 0,00 0,60 0,08 0,66 1,06 2,27
41 0,00 1,20 0,01 1,25 0,98 2,54
42 0,00 0,60 0,02 0,62 1,07 1,75
43 0,00 0,60 0,02 0,12 1,06 1,72
44 0,00 1,80 0,02 1,39 1,06 0,86
45 0,00 1,20 0,02 1,45 1,04 1,82
46 0,00 1,20 0,03 0,91 1,07 1,55
47 0,00 1,20 0,03 0,36 1,10 1,84

127
48 0,00 1,20 0,02 0,43 1,07 1,61
49 0,00 0,60 0,03 0,11 1,08 1,97
50 0,60 1,20 0,03 0,06 1,11 1,65
51 0,00 1,20 0,10 0,55 0,93 1,32
52 0,60 1,20 0,50 0,61 0,94 1,66
53 0,00 0,60 0,10 0,10 0,94 1,57
54 0,00 0,60 0,10 0,43 0,91 1,98
55 0,00 1,20 0,11 0,84 0,95 1,17
56 0,60 0,60 0,49 0,29 1,56 2,02
57 0,00 0,60 0,11 0,24 0,96 1,86
58 0,60 0,00 0,11 0,78 1,00 2,21
59 0,00 0,00 0,12 1,92 1,01 3,15
60 0,00 0,00 0,12 0,67 1,01 2,22
61 0,00 1,20 0,19 0,55 0,85 1,92
62 0,00 0,60 0,20 0,61 1,48 1,58
63 0,00 1,20 0,20 0,08 0,88 1,45
64 0,00 0,60 0,19 0,45 0,86 2,47
65 0,60 0,60 0,40 0,38 1,48 2,27
66 0,00 1,20 0,20 1,50 0,89 1,48
67 0,00 1,20 0,20 0,36 0,90 1,26
68 0,00 0,60 0,20 0,41 0,90 1,54
69 0,60 1,20 0,40 0,47 1,49 1,88
70 0,00 0,60 0,20 2,47 0,92 3,40
71 0,60 0,60 0,34 0,06 1,24 2,48
72 0,00 0,60 0,26 0,01 0,68 1,58
73 0,00 0,60 0,26 0,53 1,28 1,99
74 0,00 0,60 0,34 0,45 1,27 2,44
75 0,00 1,20 0,26 0,23 0,66 1,72
76 0,00 0,60 0,27 0,91 0,69 2,04
77 0,60 0,60 0,34 0,84 1,28 2,42
78 0,00 2,40 0,34 3,41 1,28 0,34
79 0,00 0,00 0,27 0,73 0,70 2,47
80 0,00 0,00 0,27 1,27 0,71 2,80
81 0,00 1,20 0,23 0,07 1,08 1,60
Tabela G3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 81 CPs para as
ortoimagens Pancromática Quickbird 00 geradas pelos três softwares comerciais.
Imagem Pancromática Quickbird 00
ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 0,31 2,36 1,19 4,38 1,50 2,02
2 0,30 1,17 0,65 1,82 0,95 2,99
3 0,30 0,71 0,63 2,93 0,93 2,22
4 0,30 1,04 0,67 1,47 0,97 2,51
5 0,30 0,98 0,66 1,87 0,96 2,85
6 0,29 0,92 0,70 1,67 0,99 2,59
7 0,31 0,84 1,31 2,19 1,00 3,03

128
8 0,31 0,78 1,32 2,03 1,01 2,81
9 0,31 1,31 1,34 1,25 1,03 2,56
10 0,29 1,25 0,75 1,66 1,04 2,91
11 0,37 0,64 1,14 1,95 0,77 2,59
12 0,22 0,62 0,59 2,97 0,81 2,35
13 0,38 0,51 1,20 2,23 0,82 2,74
14 0,22 1,03 1,20 0,34 1,42 1,37
15 0,21 0,95 0,66 2,09 0,87 3,04
16 0,21 0,87 0,68 1,41 0,89 2,28
17 0,21 0,82 0,68 1,74 0,89 2,56
18 0,40 0,76 1,32 2,12 0,92 2,88
19 0,20 1,31 0,77 1,27 0,97 2,58
20 0,40 0,66 1,37 1,62 0,97 2,28
21 0,17 1,16 0,38 3,75 0,55 2,59
22 0,43 1,18 0,98 1,73 0,55 2,91
23 0,17 0,53 0,98 2,09 1,15 2,62
24 0,16 1,05 1,03 1,43 1,19 2,48
25 0,44 0,39 1,00 2,43 0,56 2,82
26 0,44 0,32 1,01 2,26 0,57 2,58
27 0,16 0,87 1,02 2,02 1,18 2,89
28 0,16 2,01 1,05 0,59 1,21 2,60
29 0,14 0,13 1,15 2,91 1,29 3,04
30 0,14 0,66 1,15 1,61 1,29 2,27
31 0,09 0,04 0,89 1,95 0,98 1,99
32 0,09 0,62 0,93 2,94 1,02 2,32
33 0,51 1,73 1,52 0,29 1,01 2,02
34 0,51 1,02 0,92 1,63 0,41 2,65
35 0,09 0,34 0,91 2,16 1,00 2,50
36 0,08 0,88 0,96 1,93 1,04 2,81
37 0,08 0,82 0,98 1,74 1,06 2,56
38 0,08 0,76 0,99 2,12 1,07 2,88
39 1,06 2,59 0,00 0,00 1,06 2,59
40 0,08 1,26 0,98 1,61 1,06 2,87
41 0,01 2,45 0,99 1,29 0,98 3,74
42 0,02 0,02 1,09 2,37 1,07 2,35
43 0,02 0,48 1,08 1,84 1,06 2,32
44 0,02 0,41 1,08 2,25 1,06 2,66
45 0,02 0,25 1,06 3,27 1,04 3,02
46 0,03 0,29 1,10 2,46 1,07 2,75
47 0,03 0,84 1,13 2,20 1,10 3,04
48 0,02 0,77 1,09 2,04 1,07 2,81
49 0,03 0,71 1,11 1,86 1,08 2,57
50 0,63 1,26 1,14 1,59 0,51 2,85
51 0,10 0,65 1,03 1,87 0,93 2,52
52 0,10 0,59 0,44 2,27 0,34 2,86
53 0,10 0,50 1,04 1,67 0,94 2,17
54 0,10 1,03 1,01 1,55 0,91 2,58
55 0,11 0,36 1,06 2,01 0,95 2,37

129
56 0,11 0,31 1,07 2,31 0,96 2,62
57 0,11 0,84 1,07 1,62 0,96 2,46
58 0,71 0,78 1,11 1,43 0,40 2,21
59 0,12 1,92 1,13 1,23 1,01 3,15
60 0,12 0,67 1,13 1,55 1,01 2,22
61 0,19 0,65 1,04 2,47 0,85 3,12
62 0,20 1,21 1,68 0,97 1,48 2,18
63 0,20 1,12 1,08 1,53 0,88 2,65
64 0,19 1,05 1,05 2,02 0,86 3,07
65 0,20 0,98 1,08 1,89 0,88 2,87
66 0,20 0,30 1,09 2,98 0,89 2,68
67 0,20 0,84 1,10 1,62 0,90 2,46
68 0,20 0,19 1,10 1,95 0,90 2,14
69 0,20 0,73 1,09 2,35 0,89 3,08
70 0,20 1,87 1,12 0,93 0,92 2,80
71 0,26 0,66 0,90 2,42 0,64 3,08
72 0,26 0,61 0,94 1,57 0,68 2,18
73 0,26 1,13 1,54 1,46 1,28 2,59
74 0,34 1,05 0,93 1,99 1,27 3,04
75 0,26 0,97 0,92 1,95 0,66 2,92
76 0,27 1,51 0,96 1,13 0,69 2,64
77 0,26 1,44 0,94 1,58 0,68 3,02
78 0,34 1,01 0,94 3,75 1,28 2,74
79 0,27 0,73 0,97 1,74 0,70 2,47
80 0,27 1,27 0,98 1,53 0,71 2,80
81 0,23 1,27 1,31 1,53 1,08 2,80

130
Figura G1. Ortoimagens Pancromática Quickbird 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI
4.3 e ERDAS IMAGINE 9.1.

131
APÊNDICE H
IMAGEM PANCROMÁTICA QUICKBIRD 01
Tabela H1. Coordenada UTM em metros referentes aos 41 CPs obtidos nas ortoimagens Pancromática
Quickbird 01
Imagem Pancromática Quickbird 01
K2ORTHO PCI GEOMÁTICA ENVI ERDAS
E N E N E N E N
1 409192,20 7441609,80 409191,60 7441609,80 409193,47 7441610,02 409194,52 7441609,41
2 409216,20 7440447,60 409213,80 7440447,00 409213,27 7440446,67 409216,71 7440446,56
3 409144,80 7439259,00 409144,80 7439259,00 409145,48 7439259,32 409147,14 7439258,51
4 409215,00 7437589,80 409213,80 7437589,20 409214,47 7437589,59 409216,71 7437588,89
5 409241,40 7435918,20 409240,20 7435917,60 409240,87 7435917,46 409243,10 7435916,87
6 409257,00 7434309,60 409256,40 7434309,00 409255,87 7434308,92 409258,69 7434308,42
7 409275,60 7432831,20 409273,80 7432830,60 409275,07 7432830,59 409276,68 7432830,11
8 409258,80 7431447,00 409257,60 7431446,40 409258,87 7431447,04 409260,49 7431445,96
9 409282,20 7429482,00 409281,00 7429481,40 409282,26 7429482,13 409284,48 7429481,28
10 409368,60 7427524,20 409368,00 7427523,60 409369,26 7427524,41 409370,84 7427523,19
11 411762,60 7441725,60 411760,80 7441724,40 411760,67 7441724,61 411763,72 7441723,96
12 411959,40 7440427,80 411957,60 7440427,20 411958,06 7440427,47 411960,43 7440426,77
13 412020,60 7438632,60 412019,40 7438632,00 412020,46 7438632,34 412022,80 7438631,80
14 411972,00 7437168,00 411970,80 7437167,40 411972,46 7437167,81 411973,62 7437167,29
15 411888,60 7435331,40 411888,00 7435331,40 411889,67 7435331,88 411890,86 7435330,94
16 412087,20 7433917,80 412086,60 7433917,80 412088,25 7433918,34 412089,37 7433917,40
17 412078,80 7432371,00 412078,20 7432370,40 412079,25 7432371,01 412080,97 7432370,13
18 412130,40 7430674,20 412129,20 7430673,60 412130,25 7430674,28 412131,95 7430673,52
19 412232,40 7429282,80 412231,20 7429282,20 412232,24 7429282,94 412233,90 7429282,17
20 412313,40 7427595,60 412312,20 7427595,00 412313,83 7427595,81 412315,46 7427594,56
21 414122,40 7441788,00 414121,20 7441787,40 414122,09 7441787,61 414124,22 7441786,93
22 414051,60 7440316,20 414051,00 7440315,60 414051,30 7440315,87 414053,45 7440315,22
23 414035,40 7438512,00 414034,20 7438511,40 414034,50 7438511,75 414036,66 7438511,26
24 413981,40 7436549,40 413980,20 7436548,80 413980,51 7436549,23 413983,28 7436548,38
25 413941,20 7435053,60 413940,60 7435053,60 413941,51 7435054,09 413943,70 7435053,27
26 414045,00 7433544,00 414043,80 7433543,40 414044,10 7433543,36 414046,25 7433543,18
27 413989,20 7432391,40 413988,00 7432390,80 413990,10 7432392,01 413991,08 7432390,52
28 414298,80 7430784,00 414298,20 7430784,00 414299,68 7430784,67 414301,13 7430783,27
29 414169,20 7429149,60 414168,00 7429149,00 414168,89 7429149,74 414170,99 7429149,03
30 414133,80 7427637,00 414133,80 7427637,00 414134,69 7427637,20 414136,81 7427636,54
31 416177,40 7441897,80 416175,60 7441896,60 416176,34 7441896,81 416178,86 7441896,68
32 416149,80 7440722,40 416148,60 7440721,80 416149,34 7440722,66 416151,27 7440721,83
33 416221,80 7438463,40 416220,60 7438462,80 416221,33 7438463,75 416223,24 7438462,68
34 416404,80 7436481,60 416405,40 7436482,20 416406,72 7436482,63 416407,95 7436481,81
35 416446,80 7435228,20 416445,60 7435227,60 416446,32 7435228,09 416448,73 7435227,19
36 416516,40 7433972,40 416515,20 7433972,40 416516,51 7433972,34 416518,30 7433971,98
37 416551,20 7432155,00 416550,00 7432154,40 416550,71 7432155,02 416552,48 7432154,23
38 416666,40 7430890,20 416666,40 7430890,20 416667,10 7430890,87 416668,83 7430890,02

132
39 416725,80 7429238,40 416724,60 7429237,80 416724,70 7429237,94 416727,60 7429237,79
40 416710,80 7427760,00 416710,20 7427759,40 416710,90 7427759,60 416712,61 7427759,48
41 411424,80 7441655,40 411423,00 7441654,80 411423,50 7441655,02 411426,08 7441654,39
.
Tabela H2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens geradas pelo
K2ORTHO e pelos aplicativos comerciais para a imagem Pancromática Quickbird 01.
Imagem Pancromática Quickbird 01
K2ORTHO – PCI K2ORTHO – ENVI K2ORTHO – ERDAS
E N E N E N
1 0,60 0,00 1,27 0,22 2,32 0,39
2 2,40 0,60 2,93 0,93 0,51 1,04
3 0,00 0,00 0,68 0,32 2,34 0,49
4 1,20 0,60 0,53 0,21 1,71 0,91
5 1,20 0,60 0,53 0,74 1,70 1,33
6 0,60 0,60 1,13 0,68 1,69 1,18
7 1,80 0,60 0,53 0,61 1,08 1,09
8 1,20 0,60 0,07 0,04 1,69 1,04
9 1,20 0,60 0,06 0,13 2,28 0,72
10 0,60 0,60 0,66 0,21 2,24 1,01
11 1,80 1,20 1,93 0,99 1,12 1,64
12 1,80 0,60 1,34 0,33 1,03 1,03
13 1,20 0,60 0,14 0,26 2,20 0,80
14 1,20 0,60 0,46 0,19 1,62 0,71
15 0,60 0,00 1,07 0,48 2,26 0,46
16 0,60 0,00 1,05 0,54 2,17 0,40
17 0,60 0,60 0,45 0,01 2,17 0,87
18 1,20 0,60 0,15 0,08 1,55 0,68
19 1,20 0,60 0,16 0,14 1,50 0,63
20 1,20 0,60 0,43 0,21 2,06 1,04
21 1,20 0,60 0,31 0,39 1,82 1,07
22 0,60 0,60 0,30 0,33 1,85 0,98
23 1,20 0,60 0,90 0,25 1,26 0,74
24 1,20 0,60 0,89 0,17 1,88 1,02
25 0,60 0,00 0,31 0,49 2,50 0,33
26 1,20 0,60 0,90 0,64 1,25 0,82
27 1,20 0,60 0,90 0,61 1,88 0,88
28 0,60 0,00 0,88 0,67 2,33 0,73
29 1,20 0,60 0,31 0,14 1,79 0,57
30 0,00 0,00 0,89 0,20 3,01 0,46
31 1,80 1,20 1,06 0,99 1,46 1,12
32 1,20 0,60 0,46 0,26 1,47 0,57
33 1,20 0,60 0,47 0,35 1,44 0,72
34 0,60 0,60 1,92 1,03 3,15 0,21
35 1,20 0,60 0,48 0,11 1,93 1,01
36 1,20 0,00 0,11 0,06 1,90 0,42
37 1,20 0,60 0,49 0,02 1,28 0,77
38 0,00 0,00 0,70 0,67 2,43 0,18
39 1,20 0,60 1,10 0,46 1,80 0,61

133
40 0,60 0,60 0,10 0,40 1,81 0,52
41 1,80 0,60 1,30 0,38 1,28 1,01
Tabela H3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 41 CPs para as
ortoimagens Pancromática Quickbird 01 geradas pelos três softwares comerciais.
Imagem Pancromática Quickbird 01 ENVI – PCI ENVI – ERDAS PCI – ERDAS
E N E N E N
1 1,87 0,22 1,05 0,61 2,92 0,39
2 0,53 0,33 3,44 0,11 2,91 0,44
3 0,68 0,32 1,66 0,81 2,34 0,49
4 0,67 0,39 2,24 0,70 2,91 0,31
5 0,67 0,14 2,23 0,59 2,90 0,73
6 0,53 0,08 2,82 0,50 2,29 0,58
7 1,27 0,01 1,61 0,48 2,88 0,49
8 1,27 0,64 1,62 1,08 2,89 0,44
9 1,26 0,73 2,22 0,85 3,48 0,12
10 1,26 0,81 1,58 1,22 2,84 0,41
11 0,13 0,21 3,05 0,65 2,92 0,44
12 0,46 0,27 2,37 0,70 2,83 0,43
13 1,06 0,34 2,34 0,54 3,40 0,20
14 1,66 0,41 1,16 0,52 2,82 0,11
15 1,67 0,48 1,19 0,94 2,86 0,46
16 1,65 0,54 1,12 0,94 2,77 0,40
17 1,05 0,61 1,72 0,88 2,77 0,27
18 1,05 0,68 1,70 0,76 2,75 0,08
19 1,04 0,74 1,66 0,77 2,70 0,03
20 1,63 0,81 1,63 1,25 3,26 0,44
21 0,89 0,21 2,13 0,68 3,02 0,47
22 0,30 0,27 2,15 0,65 2,45 0,38
23 0,30 0,35 2,16 0,49 2,46 0,14
24 0,31 0,43 2,77 0,85 3,08 0,42
25 0,91 0,49 2,19 0,82 3,10 0,33
26 0,30 0,04 2,15 0,18 2,45 0,22
27 2,10 1,21 0,98 1,49 3,08 0,28
28 1,48 0,67 1,45 1,40 2,93 0,73
29 0,89 0,74 2,10 0,71 2,99 0,03
30 0,89 0,20 2,12 0,66 3,01 0,46
31 0,74 0,21 2,52 0,13 3,26 0,08
32 0,74 0,86 1,93 0,83 2,67 0,03
33 0,73 0,95 1,91 1,07 2,64 0,12
34 1,32 0,43 1,23 0,82 2,55 0,39
35 0,72 0,49 2,41 0,90 3,13 0,41
36 1,31 0,06 1,79 0,36 3,10 0,42
37 0,71 0,62 1,77 0,79 2,48 0,17
38 0,70 0,67 1,73 0,85 2,43 0,18
39 0,10 0,14 2,90 0,15 3,00 0,01
40 0,70 0,20 1,71 0,12 2,41 0,08

134
41 0,50 0,22 2,58 0,63 3,08 0,41
Figura H1. Ortoimagens Pancromática Quickbird 01 a partir do K2ORTHO, PCI Geomática 9.0, ENVI
4.3 e ERDAS IMAGINE 9.1.

135
APÊNDICE I
IMAGEM HRC/CBERS 2B
Tabela I1. Coordenada UTM em metros referentes aos 81 CPs obtidos nas ortoimagens HRC 00.
K2ORTHO PCI GEOMÁTICA ENVI
E N E N E N
1 645607,50 7483585,00 645610,00 7483585,00 645608,92 7483585,04
2 645160,00 7480817,50 645165,00 7480822,50 645163,96 7480822,56
3 644410,00 7478487,50 644410,00 7478487,50 644409,01 7478487,58
4 643512,50 7475127,50 643512,50 7475127,50 643511,57 7475127,61
5 642757,50 7471770,00 642757,50 7471770,00 642756,63 7471770,14
6 641990,00 7468777,50 641990,00 7468777,50 641989,18 7468777,66
7 641442,50 7466487,50 641442,50 7466487,50 641441,72 7466487,68
8 640702,50 7463395,00 640702,50 7463395,00 640701,77 7463395,21
9 640095,00 7459760,00 640095,00 7459760,00 640094,32 7459760,24
10 639105,00 7456587,50 639105,00 7456587,50 639104,39 7456587,76
11 650155,00 7482695,00 650155,00 7482697,50 650156,10 7482697,55
12 649480,00 7480172,50 649480,00 7480172,50 649478,65 7480172,57
13 647907,50 7475095,00 647910,00 7475097,50 647908,76 7475097,61
14 646845,00 7471845,00 646845,00 7471845,00 646843,84 7471845,14
15 646690,00 7469325,00 646690,00 7469325,00 646688,85 7469325,16
16 646170,00 7467172,50 646167,50 7467172,50 646168,88 7467172,68
17 645250,00 7464012,50 645250,00 7464012,50 645248,95 7464012,70
18 644567,50 7461252,50 644567,50 7461252,50 644566,50 7461252,73
19 643105,00 7457915,00 643105,00 7457915,00 643104,10 7457915,25
20 643475,00 7455500,00 643475,00 7455500,00 643474,08 7455500,27
21 653595,00 7481897,50 653595,00 7481897,50 653593,36 7481897,56
22 652582,50 7478455,00 652590,00 7478475,00 652590,93 7478475,08
23 651452,50 7475485,00 651460,00 7475505,00 651461,01 7475505,11
24 651265,00 7472012,50 651265,00 7472012,50 651263,52 7472012,64
25 650227,50 7468750,00 650227,50 7468750,00 650226,10 7468750,16
26 649125,00 7465585,00 649125,00 7465585,00 649123,67 7465585,19
27 648332,50 7462360,00 648332,50 7462362,50 648331,23 7462362,72
28 647262,50 7459522,50 647262,50 7459522,50 647261,31 7459522,74
29 646767,50 7455860,00 646767,50 7455860,00 646766,34 7455860,27
30 646380,00 7455015,00 646380,00 7455015,00 646378,87 7455015,28
31 658635,00 7480682,50 658635,00 7480687,50 658635,50 7480687,57
32 657992,50 7477467,50 657992,50 7477467,50 657995,54 7477482,59
33 656850,00 7473285,00 656850,00 7473285,00 656848,12 7473285,13
34 656720,00 7470855,00 656720,00 7470855,00 656718,13 7470855,15
35 655570,00 7468287,50 655570,00 7468287,50 655568,21 7468290,17
36 654795,00 7464352,50 654795,00 7464352,50 654798,27 7464367,70
37 653305,00 7462057,50 653305,00 7462057,50 653308,38 7462067,72
38 652552,50 7458637,50 652552,50 7458637,50 652553,43 7458642,75
39 651820,00 7456185,00 651820,00 7456185,00 651820,98 7456190,27
40 651402,50 7453570,00 651402,50 7453570,00 651401,01 7453570,29
41 662345,00 7479785,00 662345,00 7479785,00 662342,73 7479785,07

136
42 660845,00 7476050,00 660845,00 7476050,00 660842,84 7476050,10
43 660590,00 7472262,50 660590,00 7472262,50 660587,86 7472262,63
44 659502,50 7469630,00 659502,50 7469630,00 659500,43 7469630,16
45 658452,50 7467282,50 658452,50 7467282,50 658450,51 7467285,18
46 657475,00 7464695,00 657475,00 7464695,00 657478,08 7464712,70
47 656392,50 7461070,00 656392,50 7461070,00 656393,16 7461082,73
48 655735,00 7458335,00 655735,00 7458335,00 655733,20 7458335,25
49 655080,00 7455130,00 655080,00 7455127,50 655078,25 7455130,28
50 654575,00 7452780,00 654575,00 7452780,00 654573,29 7452780,30
51 665660,00 7478980,00 665660,00 7478980,00 665660,00 7478980,08
52 664225,00 7475565,00 664225,00 7475565,00 664222,60 7475565,11
53 663577,50 7472257,50 663577,50 7472257,50 663575,14 7472257,63
54 662912,50 7468862,50 662912,50 7468862,50 662910,19 7468862,66
55 661865,00 7465177,50 661865,00 7465177,50 661862,77 7465180,19
56 661177,50 7462910,00 661177,50 7462910,00 661175,32 7462915,21
57 660550,00 7460032,50 660550,00 7460032,50 660550,36 7460045,24
58 659890,00 7457020,00 659890,00 7457020,00 659887,91 7457020,26
59 658407,50 7454437,50 658407,50 7454437,50 658405,51 7454437,78
60 657540,00 7452437,50 657540,00 7452437,50 657538,07 7452437,80
61 670520,00 7477807,50 670520,00 7477807,50 670519,65 7477807,59
62 669510,00 7474902,50 669510,00 7474902,50 669509,72 7474902,61
63 668597,50 7471140,00 668597,50 7471140,00 668597,29 7471140,14
64 667617,50 7468347,50 667620,00 7468347,50 667617,36 7468347,67
65 667390,00 7465155,00 667390,00 7465155,00 667389,87 7465155,19
66 666490,00 7462480,00 666492,50 7462480,00 666489,94 7462480,22
67 665297,50 7459635,00 665297,50 7459635,00 665295,02 7459635,24
68 664372,50 7456677,50 664372,50 7456675,00 664370,09 7456677,76
69 663552,50 7453872,50 663552,50 7453870,00 663550,15 7453870,29
70 659400,00 7453410,00 659400,00 7453407,50 659397,94 7453407,79
71 673085,00 7477180,00 673085,00 7477180,00 673084,47 7477180,09
72 672335,00 7474017,50 672335,00 7474017,50 672337,02 7474017,62
73 671742,50 7471567,50 671745,00 7471567,50 671744,56 7471567,64
74 671067,50 7468875,00 671067,50 7468875,00 671069,61 7468875,16
75 670522,50 7466692,50 670522,50 7466692,50 670522,15 7466697,68
76 670030,00 7464292,50 670030,00 7464292,50 670029,68 7464295,20
77 669447,50 7461885,00 669447,50 7461885,00 669447,23 7461887,72
78 668790,00 7459545,00 668790,00 7459542,50 668789,77 7459545,24
79 668402,50 7457600,00 668402,50 7457597,50 668402,30 7457600,26
80 667852,50 7455652,50 667855,00 7455652,50 667852,34 7455652,77
81 667620,00 7454200,00 667620,00 7454197,50 667619,86 7454197,78
Tabela I2. Diferenças planimétricas em metros entre as coordenada UTM das ortoimagens HRC 00
geradas pelo K2ORTHO e pelos aplicativos comerciais.
K2ORTHO – PCI K2ORTHO – ENVI
E N E N
1 2,50 0,00 1,42 0,04
2 5,00 5,00 3,96 5,06
3 0,00 0,00 0,99 0,08

137
4 0,00 0,00 0,93 0,11
5 0,00 0,00 0,87 0,14
6 0,00 0,00 0,82 0,16
7 0,00 0,00 0,78 0,18
8 0,00 0,00 0,73 0,21
9 0,00 0,00 0,68 0,24
10 0,00 0,00 0,61 0,26
11 0,00 2,50 1,10 2,55
12 0,00 0,00 1,35 0,07
13 2,50 2,50 1,26 2,61
14 0,00 0,00 1,16 0,14
15 0,00 0,00 1,15 0,16
16 2,50 0,00 1,12 0,18
17 0,00 0,00 1,05 0,20
18 0,00 0,00 1,00 0,23
19 0,00 0,00 0,90 0,25
20 0,00 0,00 0,92 0,27
21 0,00 0,00 1,64 0,06
22 7,50 20,00 8,43 20,08
23 7,50 20,00 8,51 20,11
24 0,00 0,00 1,48 0,14
25 0,00 0,00 1,40 0,16
26 0,00 0,00 1,33 0,19
27 0,00 2,50 1,27 2,72
28 0,00 0,00 1,19 0,24
29 0,00 0,00 1,16 0,27
30 0,00 0,00 1,13 0,28
31 0,00 5,00 0,50 5,07
32 0,00 0,00 3,04 15,09
33 0,00 0,00 1,88 0,13
34 0,00 0,00 1,87 0,15
35 0,00 0,00 1,79 2,67
36 0,00 0,00 3,27 15,20
37 0,00 0,00 3,38 10,22
38 0,00 0,00 0,93 5,25
39 0,00 0,00 0,98 5,27
40 0,00 0,00 1,49 0,29
41 0,00 0,00 2,27 0,07
42 0,00 0,00 2,16 0,10
43 0,00 0,00 2,14 0,13
44 0,00 0,00 2,07 0,16
45 0,00 0,00 1,99 2,68
46 0,00 0,00 3,08 17,70
47 0,00 0,00 0,66 12,73
48 0,00 0,00 1,80 0,25
49 0,00 2,50 1,75 0,28
50 0,00 0,00 1,71 0,30
51 0,00 0,00 0,00 0,08

138
52 0,00 0,00 2,40 0,11
53 0,00 0,00 2,36 0,13
54 0,00 0,00 2,31 0,16
55 0,00 0,00 2,23 2,69
56 0,00 0,00 2,18 5,21
57 0,00 0,00 0,36 12,74
58 0,00 0,00 2,09 0,26
59 0,00 0,00 1,99 0,28
60 0,00 0,00 1,93 0,30
61 0,00 0,00 0,35 0,09
62 0,00 0,00 0,28 0,11
63 0,00 0,00 0,21 0,14
64 2,50 0,00 0,14 0,17
65 0,00 0,00 0,13 0,19
66 2,50 0,00 0,06 0,22
67 0,00 0,00 2,48 0,24
68 0,00 2,50 2,41 0,26
69 0,00 2,50 2,35 2,21
70 0,00 2,50 2,06 2,21
71 0,00 0,00 0,53 0,09
72 0,00 0,00 2,02 0,12
73 2,50 0,00 2,06 0,14
74 0,00 0,00 2,11 0,16
75 0,00 0,00 0,35 5,18
76 0,00 0,00 0,32 2,70
77 0,00 0,00 0,27 2,72
78 0,00 2,50 0,23 0,24
79 0,00 2,50 0,20 0,26
80 2,50 0,00 0,16 0,27
81 0,00 2,50 0,14 2,22
Tabela I3. Diferenças planimétricas em metros entre as coordenadas UTM extraídas dos 81 CPs para as
ortoimagens HRC 00 geradas pelos dois softwares comerciais.
ENVI – PCI
E N
1 1,08 0,04
2 1,04 0,06
3 0,99 0,08
4 0,93 0,11
5 0,87 0,14
6 0,82 0,16
7 0,78 0,18
8 0,73 0,21
9 0,68 0,24
10 0,61 0,26
11 1,10 0,05
12 1,35 0,07
13 1,24 0,11

139
14 1,16 0,14
15 1,15 0,16
16 1,38 0,18
17 1,05 0,20
18 1,00 0,23
19 0,90 0,25
20 0,92 0,27
21 1,64 0,06
22 0,93 0,08
23 1,01 0,11
24 1,48 0,14
25 1,40 0,16
26 1,33 0,19
27 1,27 0,22
28 1,19 0,24
29 1,16 0,27
30 1,13 0,28
31 0,50 0,07
32 3,04 15,09
33 1,88 0,13
34 1,87 0,15
35 1,79 2,67
36 3,27 15,20
37 3,38 10,22
38 0,93 5,25
39 0,98 5,27
40 1,49 0,29
41 2,27 0,07
42 2,16 0,10
43 2,14 0,13
44 2,07 0,16
45 1,99 2,68
46 3,08 17,70
47 0,66 12,73
48 1,80 0,25
49 1,75 2,78
50 1,71 0,30
51 0,00 0,08
52 2,40 0,11
53 2,36 0,13
54 2,31 0,16
55 2,23 2,69
56 2,18 5,21
57 0,36 12,74
58 2,09 0,26
59 1,99 0,28
60 1,93 0,30
61 0,35 0,09

140
62 0,28 0,11
63 0,21 0,14
64 2,64 0,17
65 0,13 0,19
66 2,56 0,22
67 2,48 0,24
68 2,41 2,76
69 2,35 0,29
70 2,06 0,29
71 0,53 0,09
72 2,02 0,12
73 0,44 0,14
74 2,11 0,16
75 0,35 5,18
76 0,32 2,70
77 0,27 2,72
78 0,23 2,74
79 0,20 2,76
80 2,66 0,27
81 0,14 0,28
Figura I1. Ortoimagens HRC 00 a partir do K2ORTHO, PCI Geomática 9.0, ENVI 4.3 e ERDAS
IMAGINE 9.1.





























