Embed Size (px)
Citation preview
Movimento da pá em rotação
• Como vimos as pás estão pivotadas na raiz de maneira aaliviar os momentos flectores nesta zona.
Movimento da pá em rotação
aliviar os momentos flectores nesta zona.• Isto permite às pás subir e descer (batimento)• As forças aerodinâmicas causam a batimento ascendente.• As forças aerodinâmicas causam a batimento ascendente.• As forças centrifugas provocam o batimento descendente• São geradas forcas inerciais na direcção oposta à• São geradas forcas inerciais na direcção oposta à
respectiva aceleração.• No movimento horizontal, é encontrada uma posição de• No movimento horizontal, é encontrada uma posição de
equilíbrio onde o somatório dos momentos devido a estastrês forças é nulo.
Helicópteros / Filipe Szolnoky Cunha Slide 1Movimento de batimento na pá em rotação
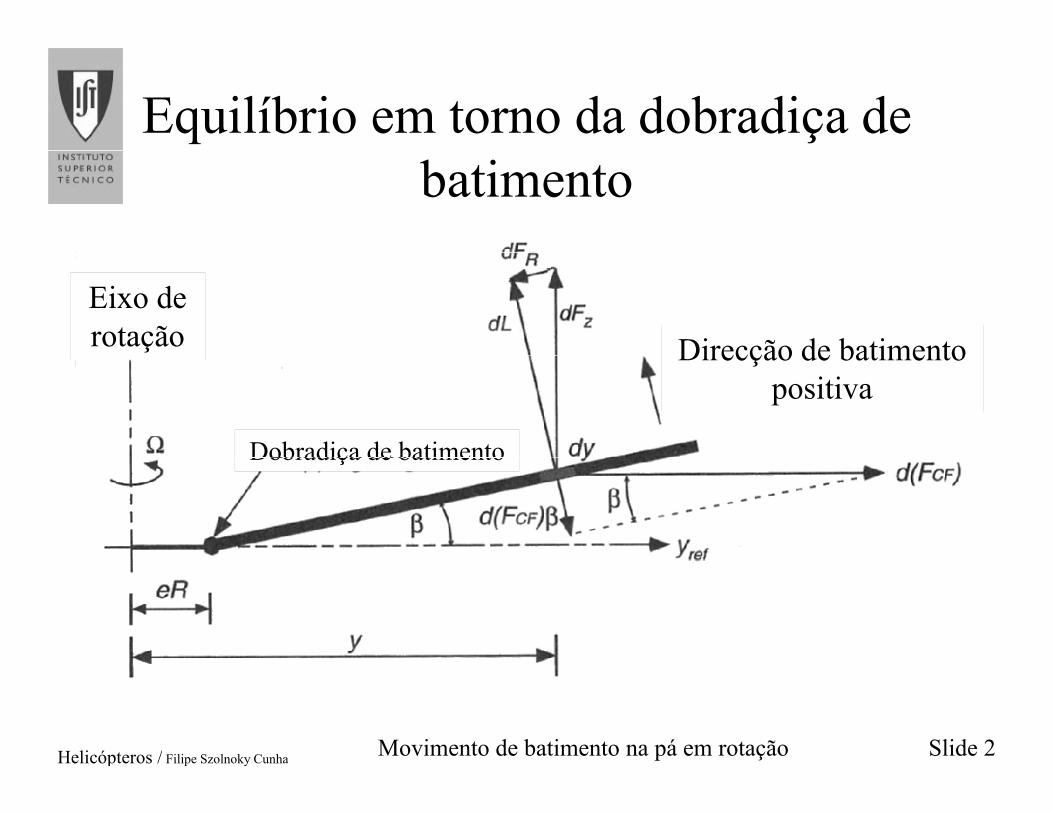
Equilíbrio em torno da dobradiça de batimentobatimento
Eixo de rotação Direcção de batimento
Dobradiça de batimento
Direcção de batimento positiva
Dobradiça de batimento
Helicópteros / Filipe Szolnoky Cunha Slide 2Movimento de batimento na pá em rotação
Equilíbrio em torno da dobradiça de batimentobatimento
• Elemento com massa por unidade de comprimento m
• Distanciado de y do eixo de rotação• Distanciado de y do eixo de rotação
• Fazendo um movimento circular com velocidade Ω
• A força centrifuga será :• A força centrifuga será :
( ) Ω=( ) ( ) rCF amdyFd = ( ) 2Ω= ymdy
Helicópteros / Filipe Szolnoky Cunha Slide 3Movimento de batimento na pá em rotação

Equilíbrio em torno da dobradiça de batimentobatimento
• Assumindo por agora que não existe offset a força • Assumindo por agora que não existe offset a força centrifuga total é:
=Ω= ∫R
ydymF 222RmΩ 2RMΩ
=
• Onde M é a massa total da pá
=Ω= ∫CF ydymF0
2
2
RmΩ
2
RMΩ=
• Onde M é a massa total da pá
• Dado que a pá tem um ângulo de “coning” de β acomponente da força centrifuga perpendicular àcomponente da força centrifuga perpendicular àpá é:
( ) ( ) β2Ω≈Helicópteros / Filipe Szolnoky Cunha Slide 4Movimento de batimento na pá em rotação
( ) ( ) ββ sinsin 2Ω= ymdyFd CFydym β2Ω≈
Equilíbrio em torno da dobradiça de batimentobatimento
• O momento em relação à dobradiça de batimento é:• O momento em relação à dobradiça de batimento é:
=Ω= ∫R
CF dyymM 22 β =Ω ∫R
mdyy22β =Ω
3
32 Rm β=Ω= ∫CF dyymM
0
β =Ω ∫ mdyy0
β3
ββ
RFRM
CF3
2
3
22
=Ω
=
• Ou podemos também escrever:
βRFCF33==
R
=Ω= ∫R
CF mdyyM0
22β β2ΩbI
Helicópteros / Filipe Szolnoky Cunha Slide 5Movimento de batimento na pá em rotação
• Onde Ib é o momento de inércia da pá em relação à dobradiça de batimento
0
Equilíbrio em torno da dobradiça de batimentobatimento
• O momento aerodinâmico em relação ao mesmo• O momento aerodinâmico em relação ao mesmoponto é:
∫−=R
LydyM β
• No equilíbrio MCF+Mβ=0 por isso :
∫0
∫R
⇒=−Ω
∫ 022 R
LydyRM β
=∫0
Lydy
R
β⇒=− ∫ 03 0
Lydy
Ω=
3
220
RMoβ
Helicópteros / Filipe Szolnoky Cunha Slide 6Movimento de batimento na pá em rotação
3
Equilíbrio em torno da dobradiça de batimentobatimento
• Dado que a dobradiça pode ter um offset• Dado que a dobradiça pode ter um offsetcorrespondente a eR(<0.15R) podemos obter aexpressão:expressão:
=Ω= ∫R
CF dyymM β22 ( )=
−Ω
3
1 332 eRm β∫eR
CF
( ) ( )222 1
eoeRM
++Ω
=β
3
• RelembrandoM=m(R-eR)=mR(1-e)
( )3
eo+=
Helicópteros / Filipe Szolnoky Cunha Slide 7Movimento de batimento na pá em rotação
• RelembrandoM=m(R-eR)=mR(1-e)
Equilíbrio em torno da dobradiça de batimentobatimento
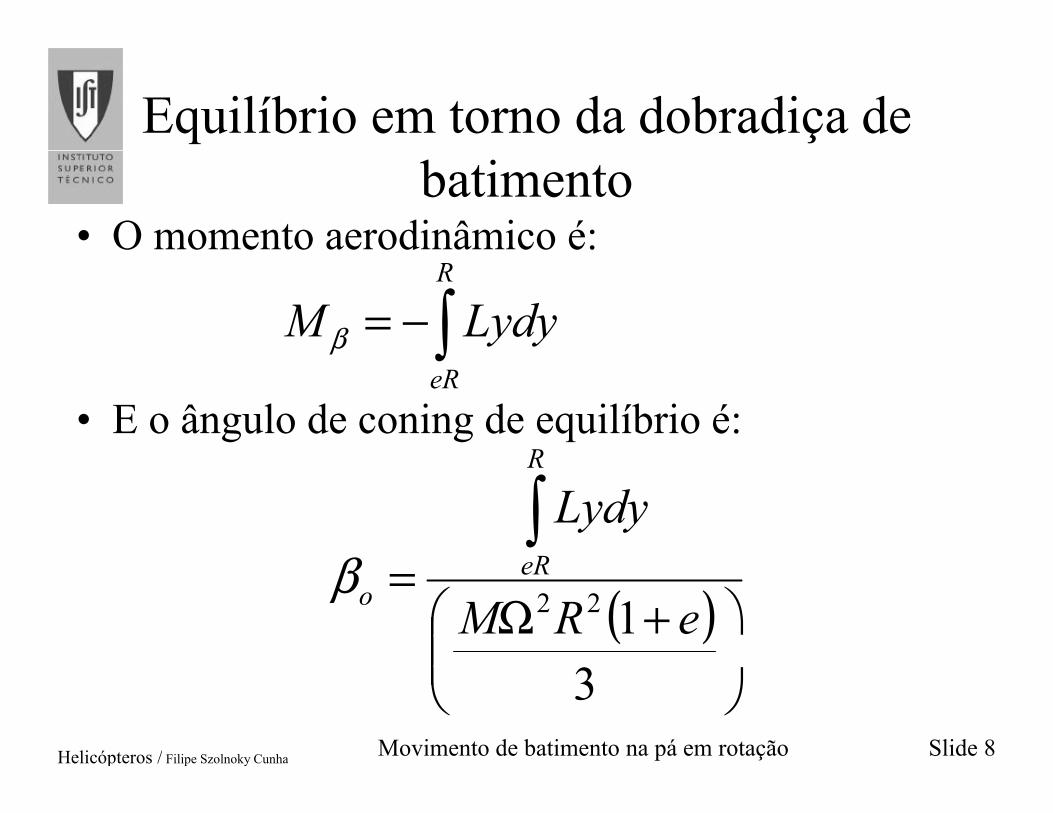
• O momento aerodinâmico é:• O momento aerodinâmico é:
∫−=R
LydyM β
• E o ângulo de coning de equilíbrio é:
∫eR
R
=∫ LydyR
eRβ( )
+Ω
=
3
122 eRM
eRoβ
Helicópteros / Filipe Szolnoky Cunha Slide 8Movimento de batimento na pá em rotação
3
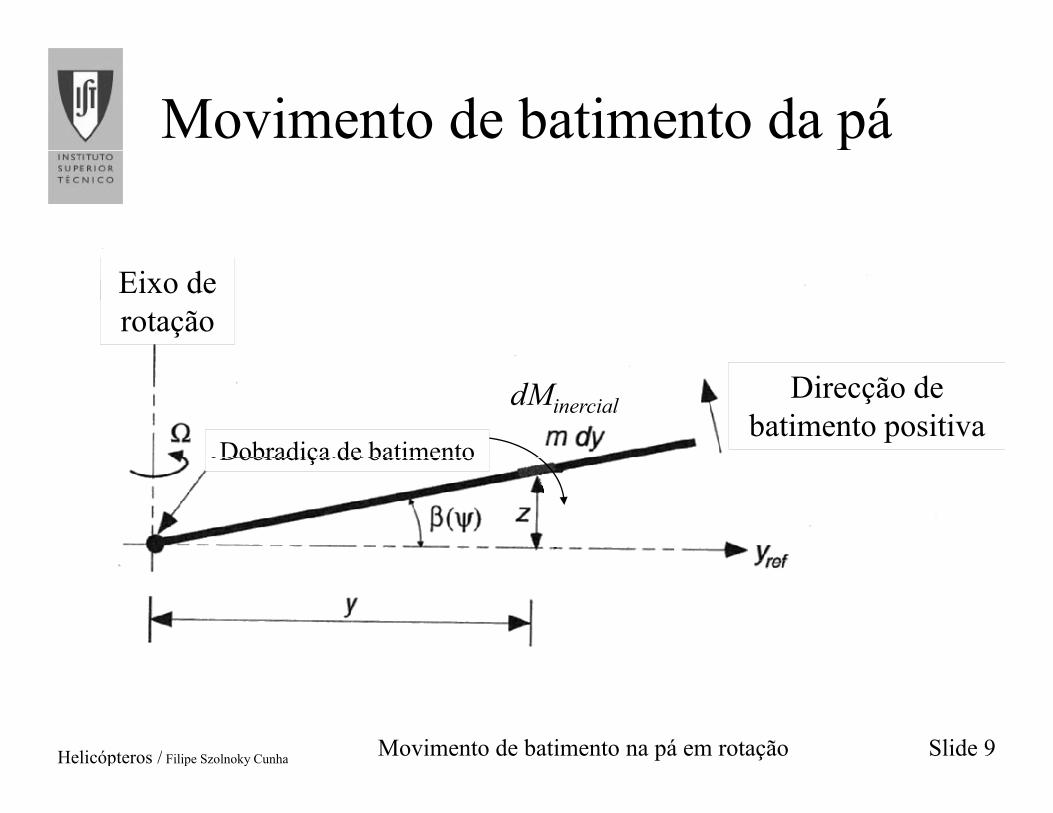
Movimento de batimento da páMovimento de batimento da pá
Eixo de rotação
M(FCF)ydLdMinercial
Dobradiça de batimento
Direcção de batimento positiva
Dobradiça de batimento
Helicópteros / Filipe Szolnoky Cunha Slide 9Movimento de batimento na pá em rotação

Movimento de batimento da páMovimento de batimento da pá
• Já obtivemos as expressões para os momentos de :• Já obtivemos as expressões para os momentos de :
• E o momento inercial é:
dyymdMCF β22Ω= LydydM −=β
• E o momento inercial é:
( ) β2ymdydM inercial =
• Assumindo um offset nulo:
( ) βymdydM inercial =
0222 =−+Ω ∫∫∫RRR
Lydydymydyym ββ
Helicópteros / Filipe Szolnoky Cunha Slide 10Movimento de batimento na pá em rotação
000∫∫∫
Movimento de batimento da páMovimento de batimento da pá
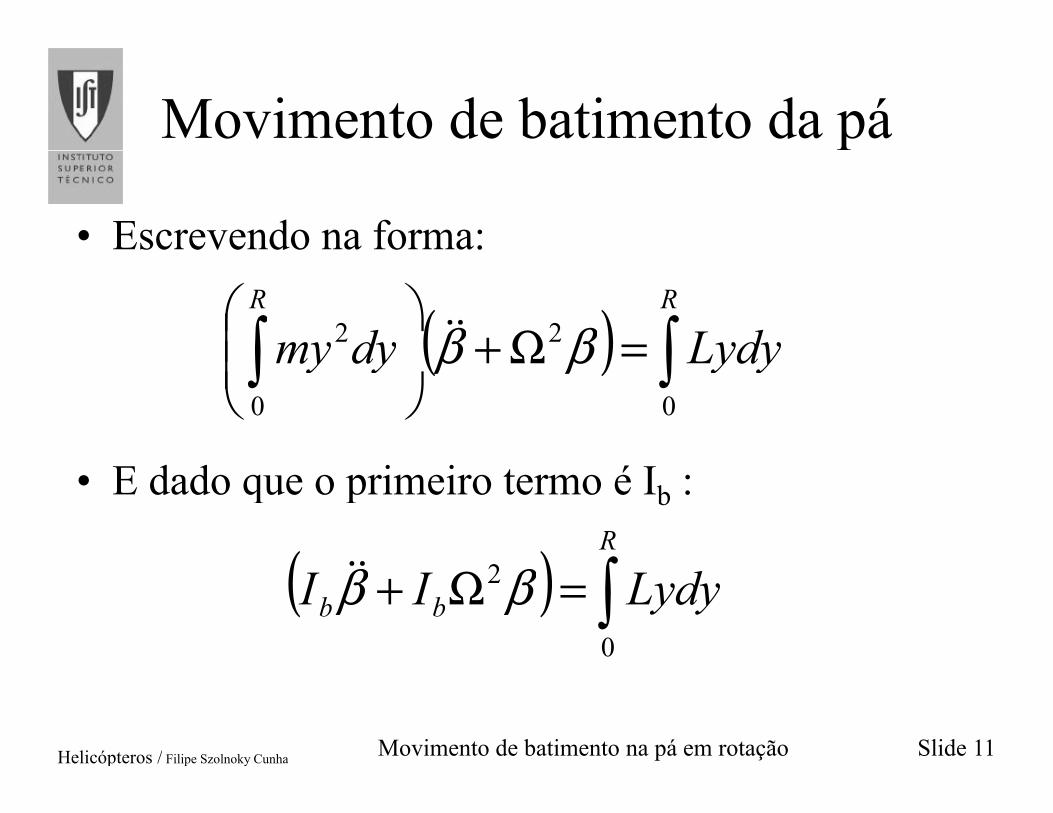
• Escrevendo na forma:• Escrevendo na forma:
( ) ∫∫ =Ω+
RR
Lydydymy 22 ββ
• E dado que o primeiro termo é I :
( ) ∫∫ =Ω+
Lydydymy00
ββ
• E dado que o primeiro termo é Ib :
( ) ∫=Ω+R
2ββ( ) ∫=Ω+ bb LydyII0
2ββ
Helicópteros / Filipe Szolnoky Cunha Slide 11Movimento de batimento na pá em rotação
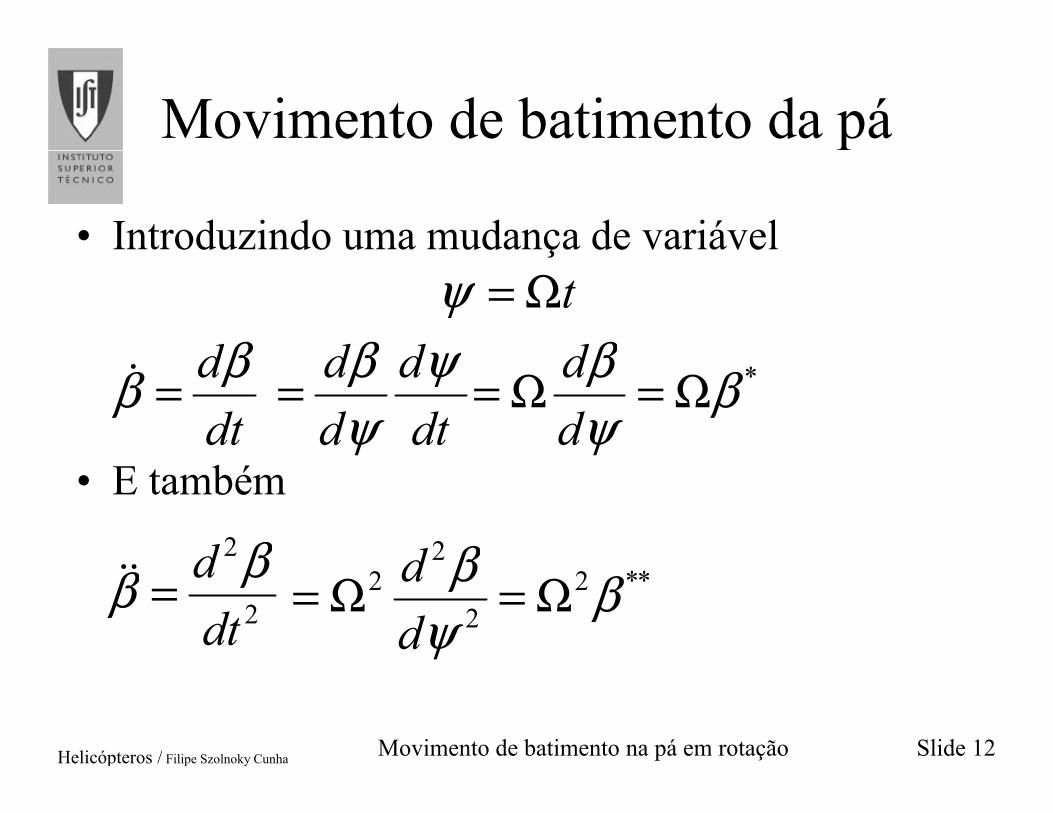
Movimento de batimento da páMovimento de batimento da pá
• Introduzindo uma mudança de variável• Introduzindo uma mudança de variável
tΩ=ψ
dβ
dd ψβ βd
• E tambémdt
dββ =
dt
d
d
d ψ
ψ
β= *β
ψ
βΩ=Ω=
d
d
• E também
2d ββ =
2βd2
2
dt
d ββ = **2
2
22 β
ψ
βΩ=Ω=
d
d
Helicópteros / Filipe Szolnoky Cunha Slide 12Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• E a equação do movimento pode ser escrita na • E a equação do movimento pode ser escrita na forma:
∫=
+R
Lydyd 2 1
ββ ( ) ∫=+⇒
R
Lydy** 1ββ∫Ω
=
+
b
LydyId
d
022
1β
ψ
β ( ) ∫Ω=+⇒
b
LydyI 0
2** 1
ββ
• Sabendo que (da TEP) vyβ
−−=
T
i
T
lTU
v
U
ycCUL
βθρ
α
2
21
Helicópteros / Filipe Szolnoky Cunha Slide 13Movimento de batimento na pá em rotação
TT
Movimento de batimento da páMovimento de batimento da pá
• Então o momento aerodinâmico é:• Então o momento aerodinâmico é:
=
−−= ∫∫
R
ilT
R
ydyU
v
U
ycCULydy 2
21 β
θρα
∫∫TT
lTUU0
20
α
=
−−Ω= ∫R
i dyyv
cC 321 βθρ
=
Ω−
Ω−Ω= ∫ i
l dyyy
vcC
0
3221 β
θρα
4λβ
−
Ω−Ω=
3
44281 i
l RcCλβ
θρα
Helicópteros / Filipe Szolnoky Cunha Slide 14Movimento de batimento na pá em rotação
Ω 3
Movimento de batimento da páMovimento de batimento da pá
• E a equação de batimento :• E a equação de batimento :
( ) ⇒
−
Ω−Ω
Ω=+
3
41 4281
2** i
l RcCI
λβθρββ
α
( )
ΩΩ 382 l
bIα
( )
−−=+⇒41 *
4** il RcC λ
βθρ
ββ α( )
−−=+⇒
3
4
8
1 *** i
b
l
I
RcC λβθ
ρββ α
RcC 4ρ• Definindo o número de Lock como:
b
l
I
RcC 4
αρ
γ =
Helicópteros / Filipe Szolnoky Cunha Slide 15Movimento de batimento na pá em rotação
bI
Movimento de batimento da páMovimento de batimento da pá
• A forma final da equação do movimento de • A forma final da equação do movimento de batimento é:
−=++4*** iλ
θγ
ββγ
β
• Se o momento aerodinâmico não fosse calculado:
−=++
3
4
88*** iλ
θγ
ββγ
β
• Se o momento aerodinâmico não fosse calculado:
γββ M=+**
∫=R1
comβγββ M=+**
∫Ω=
l
LydyRcC
M0
24
1
αρ
β
Helicópteros / Filipe Szolnoky Cunha Slide 16Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• Comparando a equação obtida:• Comparando a equação obtida:
−=++
3
4
88*** iλ
θγ
ββγ
β
• Com o sistema massa-mola-amortecedor:
388
Fkxxcxm =++
• Podemos concluir que a frequência natural não-
Fkxxcxm =++
• Podemos concluir que a frequência natural não-amortecida da pá é:
ou( )mkn =ϖ rev/1= srad /Ω
Helicópteros / Filipe Szolnoky Cunha Slide 17Movimento de batimento na pá em rotação
ou( )mkn =ϖ rev/1= srad /Ω
Movimento de batimento da páMovimento de batimento da pá
• Para o estudo da equação de batimento vamos consideraro caso do rotor em vácuo (sem forças aerodinâmicas)
0** =+ ββ ψβψββ +=com a solução0** =+ ββ ψβψββ sincos 11 sc +=
• O rotor actua como um giroscópio
• Com a introdução das forças aerodinâmicas o rotor irá• Com a introdução das forças aerodinâmicas o rotor iráentrar em precessão para uma nova orientação até que oequilíbrio é novamente atingido através doamortecimento aerodinâmico
Helicópteros / Filipe Szolnoky Cunha Slide 18Movimento de batimento na pá em rotação
amortecimento aerodinâmico
Movimento de batimento da páMovimento de batimento da pá
• Assumindo uma velocidade induzida uniforme• Assumindo uma velocidade induzida uniforme(em voo horizontal) e uma pá idealmente torcida:
∫∫
+
==1 2
11 UUUR
θ
• Substituindo U e U com as expressões obtidas
∫∫
Ω
Ω+
Ω=
Ω=
0024 2
11dr
R
U
R
U
R
UrydF
RcCM TPT
z
l
θρ
α
β
• Substituindo UT e UP com as expressões obtidascom TEP e calculando o integral
( ) ( )ψψθψψθ µµµµ 22 22
−+++++= ( ) ( )( ) ( ) ( )ψψβµψβψλ
ψψθψψθ
µµµ
µµµµβ
sincossinsin
sinsinsinsin
461
681*
461
26410
12438
122
+−+++−
−+++++= twM
Helicópteros / Filipe Szolnoky Cunha Slide 19Movimento de batimento na pá em rotação
( ) ( ) ( )ψψβµψβψλ sincossinsin 466846 +−+++−
Movimento de batimento da páMovimento de batimento da pá
• Em voo horizontal µ≠0 e a equação de batimentonão tem uma solução analítica
• Em voo horizontal µ≠0 e a equação de batimentonão tem uma solução analítica
• O termo de amortecimento (associado com β*) éde origem aerodinâmica.de origem aerodinâmica.
( )ψµγ sin1 34
8 +
• Para voo pairado e sabendo que por exemplo γ=8obtemos um amortecimento de 50% do valorcrítico. Concluímos que o movimento de
( )38
crítico. Concluímos que o movimento debatimento é amortecido e estável.
Helicópteros / Filipe Szolnoky Cunha Slide 20Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• Para resolver a equação podemos :• Para resolver a equação podemos :– Prescrever os valores de:
• Ângulo de picada colectivo θ0• Ângulo de picada colectivo θ0
• Cíclico lateral θ1c
• Cíclico Longitudinal θ1s
• Rácio da velocidade induzida λi
– Integrar numericamente
– No entanto não nos dá a percepção de como obatimento da pá é afectado pelos vários parâmetros.
Helicópteros / Filipe Szolnoky Cunha Slide 21Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• Alternativamente podemos:• Alternativamente podemos:– Encontrar uma solução periódica
• Solução periódica estável na forma de uma série de Fourier• Solução periódica estável na forma de uma série de Fourier
• Não é válida para situações transientes tais como manobras.
• Assumindo a primeira solução harmónica :
( ) ψβψββψβ sincos ++=( ) ψβψββψβ sincos 110 sc ++=
Helicópteros / Filipe Szolnoky Cunha Slide 22Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• Encontrando o par harmónico da parte constante e• Encontrando o par harmónico da parte constante eperiódica em ambos os lados da equação:
( ) ( )
−++++= 61
265
102
80 6110 θ
µµµγβ λθθ
stw
( ) ( )( )[ ] ( )
−++−−=+
+−=−
2
221
034
11
6161080
1
16
µθµθλθµθβ
µµβθβ cs
s
( )[ ] ( )
−++−−=+ 221
43
143
43
038
11 1 µθµθλθµθβ twssc
Helicópteros / Filipe Szolnoky Cunha Slide 23Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• A pairar µ=0:
=+
=−
0
011 cs
θβ
θβ• A pairar µ=0:
• E se assumirmos que o movimento de picada tem
=+ 011 sc θβ
• E se assumirmos que o movimento de picada tem a forma:
• A resposta de batimento é:ψθψθθθ sincos 110 sc ++=
• A resposta de batimento é:
( ) ( ) ( )21210 sincos ππ ψθψθβψβ −+−+= sc
• Ou seja a resposta de batimento tem um atraso de 90º em relação à variação de entrada do ângulo de
( ) ( ) ( )21210 sincos ψθψθβψβ −+−+= sc
Helicópteros / Filipe Szolnoky Cunha Slide 24Movimento de batimento na pá em rotação
90º em relação à variação de entrada do ângulo de picada.
Movimento de batimento da páMovimento de batimento da pá
• Vimos que o movimento de batimento tem a• Vimos que o movimento de batimento tem aforma:
( ) ψβψββψβ sincos 110 sc ++=
• Em que o termo β é a média ou o valor médio do
( ) ψβψββψβ sincos 110 sc ++=
• Em que o termo β0 é a média ou o valor médio domovimento de batimento e é independente paraposição azimutal da pá.posição azimutal da pá.
Helicópteros / Filipe Szolnoky Cunha Slide 25Movimento de batimento na pá em rotação
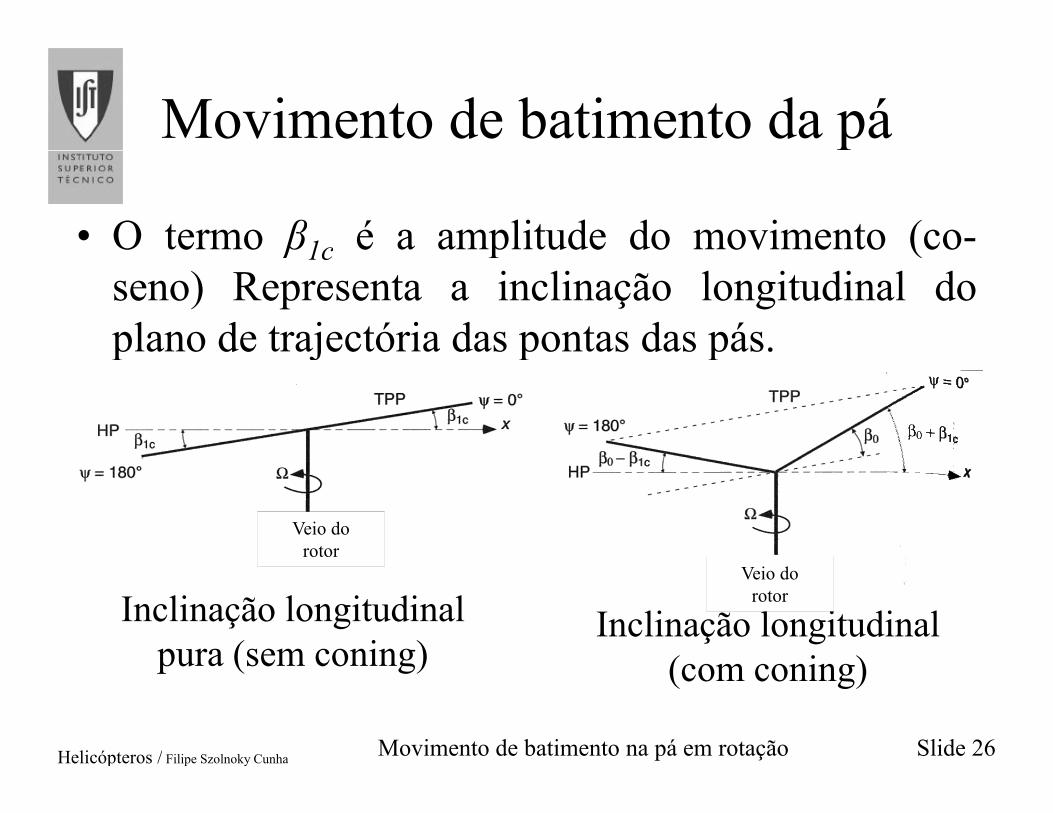
Movimento de batimento da páMovimento de batimento da pá
• O termo β1c é a amplitude do movimento (co-• O termo β1c é a amplitude do movimento (co-seno) Representa a inclinação longitudinal doplano de trajectória das pontas das pás.plano de trajectória das pontas das pás.
Veio do rotor
Inclinação longitudinal pura (sem coning)
Inclinação longitudinal (com coning)
rotorVeio do rotor
Helicópteros / Filipe Szolnoky Cunha Slide 26Movimento de batimento na pá em rotação
pura (sem coning) (com coning)
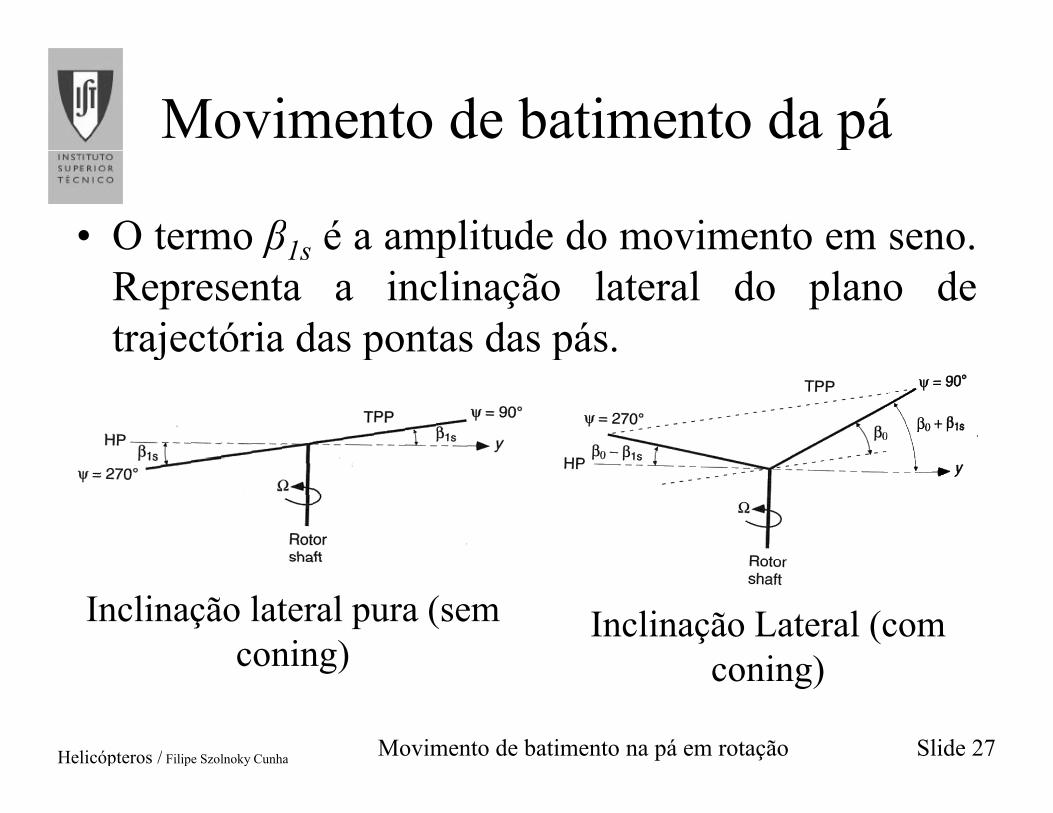
Movimento de batimento da páMovimento de batimento da pá
• O termo β1s é a amplitude do movimento em seno.• O termo β1s é a amplitude do movimento em seno.Representa a inclinação lateral do plano detrajectória das pontas das pás.trajectória das pontas das pás.
Inclinação lateral pura (sem coning)
Inclinação Lateral (com coning)
Helicópteros / Filipe Szolnoky Cunha Slide 27Movimento de batimento na pá em rotação
coning) coning)
Movimento de batimento da páMovimento de batimento da pá
• Podemos fazer uma análise semelhante para o • Podemos fazer uma análise semelhante para o caso de existir um offset na dobradiça.
• As diferenças são:• As diferenças são:– A força inercial m(y-eR) dy actua a uma distância (y-eR) da dobradiça
β
eR) da dobradiça
– A força centrifuga myΩ2dy actua a uma distância (y-eR)β da dobradiçaeR)β da dobradiça
– A forças aerodinâmicas Ldy actuam a uma distancia (y-eR) da dobradiça
Helicópteros / Filipe Szolnoky Cunha Slide 28Movimento de batimento na pá em rotação
(y-eR) da dobradiça
Movimento de batimento da páMovimento de batimento da pá
• A equação dos momentos em relação à dobradiça:• A equação dos momentos em relação à dobradiça:
( ) ( ) ( ) 022 =−−−+−Ω ∫∫∫RRR
dyeRyLdyeRymdyeRyym ββ
• Neste caso o momento de inércia em relação ao
( ) ( ) ( )∫∫∫eReReR
• Neste caso o momento de inércia em relação ao eixo da dobradiça é:
( )∫ −=R
b dyeRymI2
Helicópteros / Filipe Szolnoky Cunha Slide 29Movimento de batimento na pá em rotação
∫eR
b
Movimento de batimento da páMovimento de batimento da pá
• A equação de batimento da pá é:• A equação de batimento da pá é:
( )( )∫
∫
−R
R
dyeRymeR
( )∫∫
−=
+Ω+eRb
eRb dyeRyL
II ββ 12
• ou
R1
• ou
( )∫ −Ω
=+R
eR
b dyeRyLvI2
2** 1ββ β
Helicópteros / Filipe Szolnoky Cunha Slide 30Movimento de batimento na pá em rotação
eR
Movimento de batimento da páMovimento de batimento da pá
• Nesta expressão ( )R
dyeRymeR ∫ −
+=2• Nesta expressão
• E com a análoga com o sistema mass-mola-b
eR
Iv
∫+=12
β
• E com a análoga com o sistema mass-mola-amortecedor, a frequência não amortecida do rotoré: 33 eeé:
• Dados os valores de e serem pequenos a( ) 2
31
12
31
e
e
ev n +≈
−+==ϖβ
• Dados os valores de e serem pequenos afrequência natural não amortecida é ligeiramentemaior do que 1/rev
Helicópteros / Filipe Szolnoky Cunha Slide 31Movimento de batimento na pá em rotação
maior do que 1/rev
Movimento de batimento da páMovimento de batimento da pá
• Isto também quer dizer que o atraso entre a• Isto também quer dizer que o atraso entre aentrada e resposta em batimento do rotor tem queser menor do que 90º. Nesta caso como a equaçãoser menor do que 90º. Nesta caso como a equaçãode batimento é:
ββ γββ Mv =+ 2**
• A resposta de batimento ao uma entrada do ângulode picada é: ( )
=+−v2 1 θγγ
ββde picada é: ( )
( )
=−−
=+− csc
v
v
2
112
1
1
881
θγγ
ββ
θγγ
ββ β
Helicópteros / Filipe Szolnoky Cunha Slide 32Movimento de batimento na pá em rotação
( )
=−− scs v 112
1 881 θ
γγββ β
Movimento de batimento da páMovimento de batimento da pá
• O que dá o ângulo longitudinal de batimento• O que dá o ângulo longitudinal de batimento
( )2 81−+− θθ v( )
( )2
12
1
18
81
−+−
=
θγ
θ
ββv cs
c
( )2
2 811
−+
γβv
Helicópteros / Filipe Szolnoky Cunha Slide 33Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• E o ângulo lateral de batimento• E o ângulo lateral de batimento
( )2 81−+ θθ v( )
( )2
12
1
18
81
−+
=
θγ
θ
ββv sc
s
( )2
2 811
−+
γβv
Helicópteros / Filipe Szolnoky Cunha Slide 34Movimento de batimento na pá em rotação
Movimento de batimento da páMovimento de batimento da pá
• Finalmente a frequência forçada 1/rev é menor• Finalmente a frequência forçada 1/rev é menorque a frequência natural de batimento e pode serdemonstrado que o atraso (menor que 90º) é dadodemonstrado que o atraso (menor que 90º) é dadopor:
−8
1 γγe
( ) ( )
−≈
−
−
= −−
18tan
183
1tan
21
21
γγ
φvv( ) ( )
−
− 118 22ββ vv
Helicópteros / Filipe Szolnoky Cunha Slide 35Movimento de batimento na pá em rotação