Embed Size (px)
Citation preview
PROJETO DE VARIADOR DE VELOCIDADES DE QUATRO MARCHAS PARA
VEÍCULO ELÉTRICO TIPO SAE.
Pedro Ivo Meirinho Galvão
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Prof. Fernando Augusto de Noronha Cas-
tro Pinto; Dr.Ing.
Rio de Janeiro
Agosto de 2018
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
PROJETO DE VARIADOR DE VELOCIDADE DE QUATRO MARCHAS PARA
VEÍCULO ELÉTRICO TIPO SAE
Pedro Ivo Meirinho Galvão
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE EN-
GENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL
DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OB-
TENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. Fernando Augusto de Noronha Castro Pinto; Dr.Ing.
________________________________________________
Prof. Armando Carlos de Pina Filho; D.Sc
________________________________________________
Prof. Vitor Ferreira Romano; Dott. Ric
RIO DE JANEIRO, RJ – BRASIL.
AGOSTO DE 2018
i
Galvão, Pedro Ivo Meirinho.
Projeto de variador de velocidade de quatro marchas
para veículo elétrico tipo SAE. /Pedro Ivo Meirinho Galvão
– Rio de Janeiro: UFRJ / ESCOLA POLITÉCNICA, 2018.
p.:85 il.; 29,7 cm
Orientador: Fernando Augusto de Noronha Castro
Pinto
Projeto de Graduação – UFRJ / Escola Politécnica /
Curso de Engenharia Mecânica, 2018.
Referências Bibliográficas: p. 83-84.
1.Introdução. 2.Elementos de transmissão mecânica.
3.Mecanismos de transmissão de potência mecânica.
4.Características gerais do veículo. 5.Dimensionamento e
seleção de componentes. 6.Sensoreamento. 7.Simulações
8.Conclusão 9.Referências bibliográficas. 10. Anexos. I.
Pinto, Fernando Augusto de Noronha Castro. II. Universi-
dade Federal do Rio de Janeiro, Escola Politécnica, Curso
de Engenharia Mecânica. III. Título

ii
“No que diz respeito ao empenho; ao com-
promisso; ao esforço; à dedicação, não existe
meio termo. Ou você faz uma coisa bem feita
ou não faz.”
(Ayrton Senna)
iii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte dos re-
quisitos necessários para a obtenção do grau de Engenheiro Mecânica.
PROJETO DE VARIADOR DE VELOCIDADE COM QUATRO MARCHAS PARA
VEÍCULO TIPO FORMULA SAE
Pedro Ivo Meirinho Galvão
Agosto/2018
Orientador: Fernando Augusto de Noronha Castro Pinto
Curso: Engenharia Mecânica
Em um veículo, a necessidade de variação de velocidade se dá para atender às dife-
rentes requisições de torque que este mesmo veículo pode encontrar, desde aclives, onde se
necessita mais torque, até movimentos em superfícies dadas planas, onde o torque é preterido
em detrimento das mais altas rotações do motor.
Este projeto aborda a idealização de uma transmissão de quatro marchas concebida
para a equipe de Fórmula SAE elétrico da UFRJ, Minerva eRacing. Desde o projeto inicial
com premissas básicas; até a elaboração de desenhos técnicos de fabricação, passando por
seleção de componentes comerciais; projeto de eixos, engrenamentos e elementos de trans-
missão de torque. Deste modo, o trabalho visa fornecer aos protótipos desta mesma equipe a
melhor relação “Torque-Rotação” possível para as situações de corrida que eles possam en-
contrar.
Palavras-chave: Transmissão, Formula SAE, Sincronização, Engrenagens.

iv
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the re-
quirements for the degree of Mechanical Engineer.
ELECTRIC FORMULA SAE VEHICLE FOUR-SPEED TRANSMISSION PROJECT
Pedro Ivo Meirinho Galvão
August/2018
Advisor: Fernando Augusto de Noronha Castro Pinto
Course: Mechanical Engineering
In a vehicle, the need of speed variation exists to attend the many torque requisitions
that this same vehicle may face. Since uphill slopes, when more torque is needed, down to
movements over flat surfaces, when the torque is neglected in detriment of engine’s high rev-
olution.
This project approaches the idealization of a four-speed transmission conceived for
the Federal University of Rio de Janeiro’s electrical Formula SAE team, Minerva eRacing.
Since the initial project, with basic assumptions; up to technical drawings elaboration, passing
by the commercial components selection; shafts project; gears; and torque transmitting ele-
ments. Hence, the work aims to supply the team’s very own prototypes the best “torque-
rotation” ratio possible to the race occasions that they may face.
Keywords: Transmission, Formula SAE, Synchronization, Gears.

v
DEDICATÓRIA
Dedico este projeto final aos meus familiares que me orientaram, sofreram e, sobre-
tudo comemoraram ao meu lado durante essa longa jornada. Minha mãe Ana Rosa Meirinho
Galvão; meu pai Marcus Vinicius Galvão Silva; minha irmã Flora Meirinho Galvão; e minha
avó Maria Madalena Gameiro Meirinho, que me ofereceram todo tipo de suporte que um gra-
duando de engenharia –mas antes de tudo, neto; filho; e irmão- pode carecer.
Não poderia deixar de dedicar tão laborioso trabalho à mulher da minha vida Barbara
Bussinger de Souza Penna, por ser esse porto seguro e lastro emocional. Sempre me motivan-
do, dividindo emoções e comemorando cada obstáculo vencido. Sem você, eu estaria incom-
pleto.
vi
AGRADECIMENTOS
Aos irmãos que não tive e que ganhei pelo simples fato de perseguir os meus sonhos.
Álvaro Braga; Arthur Melo; Bruno Soares; Gabriel Leal; Gustavo Couto; Lucas Faria; Luiz
Paulo; Matheus Costa; Rafael Magalhães; Thiago Jakobsson e Victor Oliveira, obrigado pelas
inúmeras horas de risos, estudos e desespero pré e pós-provas. Jamais me esquecerei de vocês.
Aos integrantes da melhor e maior equipe de Formula SAE do Brasil –a Icarus- com
os quais tive o privilégio de dividir dois maravilhosos anos de aprendizado. Vocês foram a
melhor equipe que tive chance de integrar.
A todos os professores –não só os da graduação, mas também os dos níveis funda-
mental e médio- que tiveram a disposição e paciência de ensinar a mim e a todos os meus
colegas os conceitos e ensinamentos necessários à formação de um engenheiro mecânico.
Vocês são os verdadeiros heróis dessa nação.
Ao professor Fernando Augusto de Noronha Castro Pinto, primeiramente pela orien-
tação no projeto do Formula SAE, depois por ter aceitado me orientar neste projeto de conclu-
são de curso. Obrigado pelos seus ensinamentos e –sobretudo- paciência.
Às amizades que fiz durante meu período de estágio na TechnipFMC. Gerentes; Co-
ordenadores; Engenheiros; Assistentes; e outros estagiários. Obrigado pelo conhecimento
passado adiante e por essa iniciação em minha vida profissional.
Aos integrantes da equipe Minerva eRacing, em especial ao Lucas Lessa, Matheus
Campagnani e Matheus Martins por todo suporte, compreensão e celeridade na entrega das
informações requisitadas durante a elaboração deste projeto. Apesar de ser uma equipe ainda
incipiente na presente data, puderam compreender completamente a necessidade de evolução
do protótipo e do avanço técnico que tal projeto acarretará nos futuros protótipos da mesma.
A todos os quais porventura posso ter me esquecido de mencionar nessa seção de
agradecimentos e que contribuíram para a minha formação não apenas como engenheiro pro-
fissional, mas também como ser humano, o meu mais sincero obrigado.
vii
SUMÁRIO
1. INTRODUÇÃO .................................................................................................... 11
1.1. Exemplos de transmissão de potência ......................................................... 11
1.2. Formula SAE elétrico .................................................................................. 12
1.3. Objetivo ....................................................................................................... 12
2. ELEMENTOS DE TRANSMISSÃO DE POTÊNCIA MECÂNICA .................. 13
2.1. Transmissão por correias ............................................................................. 13
2.2. Transmissão por correntes ........................................................................... 14
2.3. Transmissão por engrenagens ...................................................................... 16
Engrenagens cilíndricas de dentes retos ................................................. 17 2.3.1
Engrenagens cilíndricas de dentes helicoidais ........................................ 19 2.3.2
Engrenagens cônicas ............................................................................... 21 2.3.3
3 MECANISMOS DE TRANSMISSÃO DE POTÊNCIA MECÂNICA ............... 23
3.1. Transmissão manual .................................................................................... 23
Assíncrona .............................................................................................. 23 3.3.1
Sequencial ............................................................................................... 24 3.3.2
3.2. Transmissão automática............................................................................... 25
3.2.1 CVT ........................................................................................................ 25
3.2.2. Dupla embreagem..................................................................................... 28
4. CARACTERÍSTICAS GERAIS DO VEÍCULO ................................................. 30
viii
4.1. Dimensões e COG ....................................................................................... 30
4.2. Especificações do motor e curvas ................................................................ 31
5. DIMENSIONAMENTO E SELEÇÃO DE COMPONENTES ............................ 33
5.1. Definição do torque máximo ....................................................................... 33
5.2. Escolha do sistema de variação de velocidades ........................................... 36
5.3. Determinação do diâmetro mínimo dos eixos ............................................. 38
5.4. Projeto das engrenagens .............................................................................. 41
5.4.1 Critério de tensões AGMA ..................................................................... 45
5.4.2 Falha por flexão da engrenagem ............................................................. 48
5.4.3 Falha por fadiga superficial .................................................................... 51
5.5. Embreagem .................................................................................................. 54
5.5.1 Molas de retorno ..................................................................................... 54
5.5.2. Escolha dos discos de fricção ................................................................. 60
5.5.3 Estruturas internas .................................................................................. 62
5.6. Elementos de transmissão de torque ............................................................ 63
5.7. Rolamentos e rentetores ............................................................................... 65
5.8. Escolha dos solenoides ................................................................................ 70
5.9. Esquemático hidráulico ............................................................................... 71
6. SENSOREAMENTO ............................................................................................ 74
6.1. Sensor Hall................................................................................................... 74

ix
6.2. Microcontrolador ......................................................................................... 75
6.3. Visor de LCD ............................................................................................... 76
6.4. Relés ............................................................................................................ 76
7 SIMULAÇÕES ..................................................................................................... 77
8 CONCLUSÃO ...................................................................................................... 82
9 REFERÊNCIAS BIBLIOGRÁFICAS .................................................................. 83
10 ANEXOS .............................................................................................................. 85
x
LISTA DE FIGURAS:
Figura 1: Funcionamento de uma roda d’água. ........................................................................ 11
Figura 2: Transmissão por correias. ......................................................................................... 13
Figura 3: Diversos perfis de correias. ....................................................................................... 14
Figura 4: Funcionamento da transmissão por corrente de tambor............................................ 15
Figura 5: Corrente de dentes invertidos. ................................................................................... 15
Figura 6: Correntes Tripla; Dupla; e Simples ........................................................................... 16
Figura 7: Par de engrenagens cilíndricas de dentes retos. ........................................................ 17
Figura 8: Par de engrenagens cilíndricas de dentes helicoidais................................................ 19
Figura 9: Principais parâmetros de uma engrenagem cilíndrica de dentes helicoidais. ........... 20
Figura 10: Principais parâmetros de um par de engrenagens cônicas. ..................................... 21
Figura 11: Fluxo de potência em um câmbio manual de 4 velocidades. .................................. 24
Figura 12: Trambulador de um câmbio sequencial. ................................................................. 25
Figura 13: Funcionamento de um câmbio CVT de polias. ....................................................... 26
Figura 14: Funcionamento de um câmbio CVT toroidal. ......................................................... 26
Figura 15: Representação de um CVT cônico. ......................................................................... 27
Figura 16: Conjunto de discos de fricção. ................................................................................ 28
Figura 17: Fluxo de potência em uma transmissão de dupla embreagem. ............................... 29
Figura 18: Representação do protótipo de 2017. ...................................................................... 30
Figura 19: Especificações técnicas da unidade motriz. ............................................................ 31
Figura 20: Curvas Torque x Rotação e Potência x Rotação. .................................................... 31
Figura 21: Representação das reações ao protótipo subir um aclive. ....................................... 33
Figura 22: Esquema cinemático para a transmissão proposta .................................................. 36
Figura 23: Gráfico dente-de-serra para troca de marcha. ......................................................... 43
Figura 24: Fator de forma da AGMA. ...................................................................................... 48
Figura 25: Fator de sobrecarga. ................................................................................................ 49
Figura 26: Constantes empíricas A, B e C................................................................................ 50
Figura 27: Fator de ciclagem de tensão. ................................................................................... 50
Figura 28: Módulo de elasticidade para materiais corriqueiros de engrenagens. ..................... 52
Figura 29: Tensão de contato por dureza.................................................................................. 53
Figura 30: Fator de razão de dureza. ........................................................................................ 53
Figura 31: Relações matemáticas para extremidades de molas. ............................................... 58
Figura 32: Tipos de extremidades de molas. ............................................................................ 59

xi
Figura 33: Parâmetros normatizados para chavetas. ................................................................ 65
Figura 34: Retentores de vedação axial. ................................................................................... 70
Figura 35: Retentores de vedação radial................................................................................... 70
Figura 36: Solenóide de 3 posições. ......................................................................................... 71
Figura 37: Esquemático hidráulico proposto. ........................................................................... 72
Figura 38: Representação do sensor Hall escolhido. ................................................................ 74
Figura 39: Microcontrolador Arduino Due. ............................................................................. 75
Figura 40: Exemplo de visor de LED a ser empregado. ........................................................... 76
Figura 41: Simulação do contato das engrenagens da primeira marcha. .................................. 77
Figura 42: Simulação do contato das engrenagens da segunda marcha. .................................. 78
Figura 43: Simulação do contato das engrenagens da terceira marcha. ................................... 78
Figura 44: Simulação do contato das engrenagens da quarta marcha. ..................................... 79
Figura 45: Simulação do eixo de entrada maciço. .................................................................... 80
Figura 46: Simulação do eixo de entrada vazado. .................................................................... 81
Figura 47: Simulação do eixo de saída. .................................................................................... 81

xii
LISTA DE TABELAS
Tabela 1: Especificações do protótipo de 2017 da Minerva eRacing ....................................... 30
Tabela 2: Relação de transmissão ............................................................................................. 41
Tabela 3: Velocidade do veículo de acordo com a marcha e rotação de troca. ........................ 42
Tabela 4: Rotação de cada marcha. .......................................................................................... 44
Tabela 5: Torque de saída de acordo com a marcha selecionada. ............................................ 44
Tabela 6: Diâmetros primitivos dos pinhões e coroas. ............................................................. 46
Tabela 7: Velocidades para cada marcha. ................................................................................ 46
Tabela 8: Força tangencial em cada engrenagem. .................................................................... 47
Tabela 9: Fator dinâmico para cada marcha. ............................................................................ 47
Tabela 10: Fator J e tensão AGMA. ......................................................................................... 48
Tabela 11: Tensão de flexão dos pinhões e das coroas. ........................................................... 50
Tabela 12: Fatores de segurança dos pinhões e das coroas. ..................................................... 51
Tabela 13: Tensão para as coroas e para os pinhões. ............................................................... 52
Tabela 14: Fatores de segurança dos pinhões e das coroas. ..................................................... 54
Tabela 15: Parâmetros iniciais para os projetos das molas ...................................................... 56
Tabela 16: Parâmetros das molas (diâmetros e razão C). ......................................................... 56
Tabela 17: Tensão cisalhante para as molas dos eixos. ............................................................ 57
Tabela 18: Comprimentos das molas........................................................................................ 59
Tabela 19: Parâmetros das molas (passo e ângulo de hélice). .................................................. 60
Tabela 20: Parâmetros das molas (critérios de flambagem). .................................................... 60
Tabela 21: Especificações do sensor Hall. ............................................................................... 75
11
1. INTRODUÇÃO
1.1. Exemplos de transmissão de potência
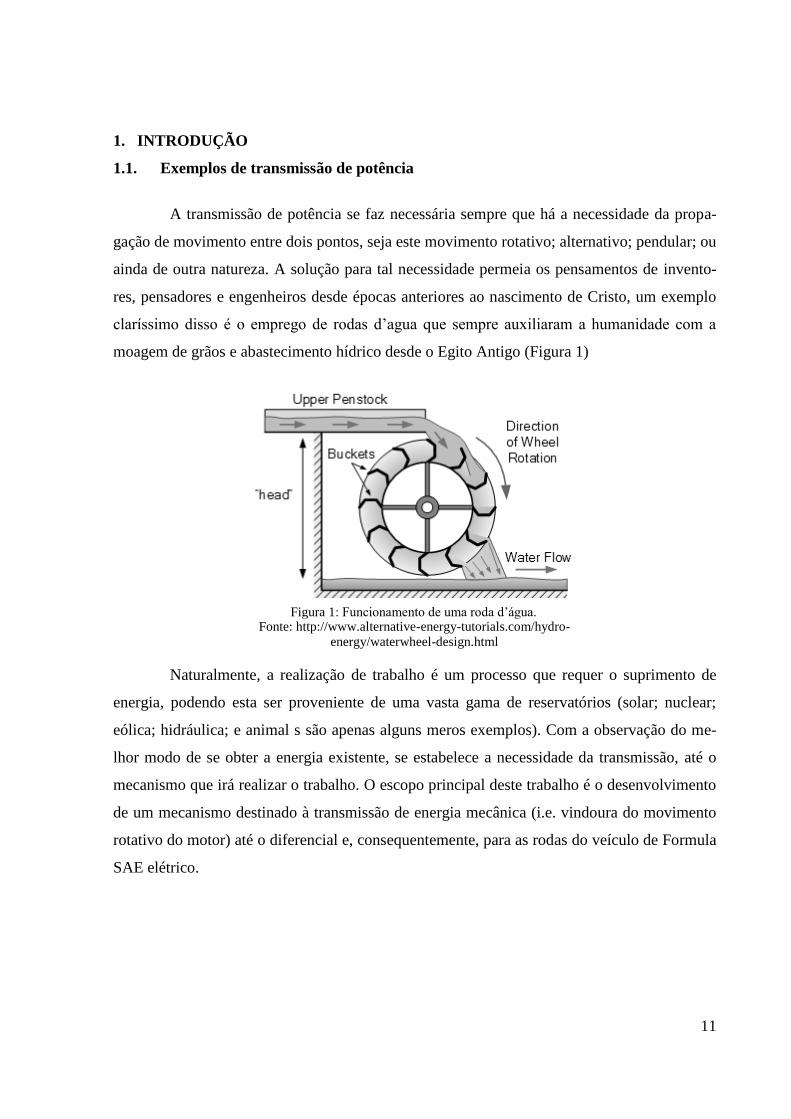
A transmissão de potência se faz necessária sempre que há a necessidade da propa-
gação de movimento entre dois pontos, seja este movimento rotativo; alternativo; pendular; ou
ainda de outra natureza. A solução para tal necessidade permeia os pensamentos de invento-
res, pensadores e engenheiros desde épocas anteriores ao nascimento de Cristo, um exemplo
claríssimo disso é o emprego de rodas d’agua que sempre auxiliaram a humanidade com a
moagem de grãos e abastecimento hídrico desde o Egito Antigo (Figura 1)
Naturalmente, a realização de trabalho é um processo que requer o suprimento de
energia, podendo esta ser proveniente de uma vasta gama de reservatórios (solar; nuclear;
eólica; hidráulica; e animal s são apenas alguns meros exemplos). Com a observação do me-
lhor modo de se obter a energia existente, se estabelece a necessidade da transmissão, até o
mecanismo que irá realizar o trabalho. O escopo principal deste trabalho é o desenvolvimento
de um mecanismo destinado à transmissão de energia mecânica (i.e. vindoura do movimento
rotativo do motor) até o diferencial e, consequentemente, para as rodas do veículo de Formula
SAE elétrico.
Figura 1: Funcionamento de uma roda d’água. Fonte: http://www.alternative-energy-tutorials.com/hydro-
energy/waterwheel-design.html
12
1.2. Formula SAE elétrico
Criada na década de 80 no estado do Texas, Estados Unidos, substituindo uma versão
anterior chamada Mini-Indy, alavancada pela carência de engenheiros especializados em veí-
culos de alto desempenho. Foi impulsionado pelas três grandes montadoras Americanas, Ge-
neral Motors, Ford e Chrysler, que viram nessa competição uma oportunidade única de ga-
rimpar novos engenheiros para suas equipes. [1]
Devido à crescente demanda e interesse do mercado por veículos híbridos e elétricos,
foi criada a categoria FSAE Elétrico, que trata da concepção de um veículo do tipo “fórmula”,
com chassis monoposto, motor de até 80 kW e conjunto de baterias com até 300 V.
1.3. Objetivo
Este projeto de graduação tem como objetivo o desenvolvimento de um variador de
velocidades de quatro marchas do tipo dupla embreagem, para aplicação no projeto da equipe
de Formula SAE categoria elétrica da Universidade Federal do Rio de Janeiro, Minerva e-
Racing.
Atualmente, o protótipo da equipe não possui um variador de velocidade, sendo sua
unidade de potência sendo conectada diretamente ao diferencial empregado. Restringindo,
assim, a faixa de velocidades final do automóvel.
Além disso, este projeto visa uma futura implementação deste projeto no protótipo de
Formula SAE elétrico pertencente à universidade. Para isso, a solução proposta deve ser con-
fiável e robusta o bastante para que, quando sujeita aos esforços (sejam eles típicos ou cho-
ques) não haja um comprometimento de seus posicionamentos nem integridade, além do
mais, ela deve ser economicamente factível e tecnicamente fabricável, e simples o bastante
para que possa ser revisada e reparada por qualquer integrante da equipe.

13
2. ELEMENTOS DE TRANSMISSÃO DE POTÊNCIA MECÂNICA
Na seção abaixo, irão ser explicitadas algumas das maneiras mais usuais para a
transmissão de potencia mecânica entre dois pontos distintos. Vale ressaltar que os tópicos
abaixo não explicitam todos os modos de transmissão de potencia, mas sim, os mais usuais e
corriqueiros.
2.1. Transmissão por correias
A transmissão de potência pelo uso de correias ou lonas é um dos tipos de transmis-
são mais antiga que se tem notícia. Muito versáteis, podem ser empregadas tanto em rotações
de mesmo sentido quanto de sentidos opostos. Podem, ainda, permitir a concepção de projetos
que tenham em vista eixos concorrentes (Figura 2). Além disso, a transmissão por correias
permite elevadas relações de transmissão e fácil variação de velocidades devido ao seu meca-
nismo de funcionamento ser o atrito gerado entre as superfícies da correia e da polia movida.
Figura 2: Transmissão por correias. Fonte: https://de.wikipedia.org/wiki/Treibriemen
14
Outras características deste modo de transmissão são: fácil manutenção e baixo custo
da mesma; altíssima absorção de choques; transmissão de altas potências; baixo ruído; entre
outros.
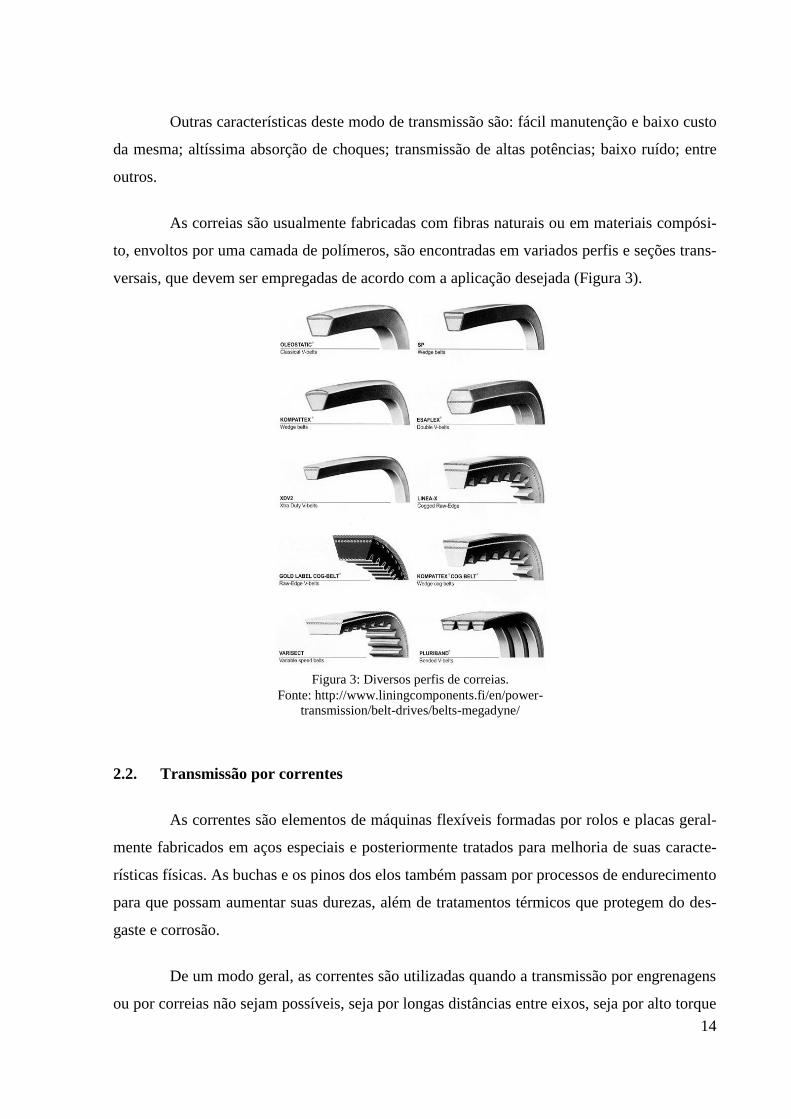
As correias são usualmente fabricadas com fibras naturais ou em materiais compósi-
to, envoltos por uma camada de polímeros, são encontradas em variados perfis e seções trans-
versais, que devem ser empregadas de acordo com a aplicação desejada (Figura 3).
2.2. Transmissão por correntes
As correntes são elementos de máquinas flexíveis formadas por rolos e placas geral-
mente fabricados em aços especiais e posteriormente tratados para melhoria de suas caracte-
rísticas físicas. As buchas e os pinos dos elos também passam por processos de endurecimento
para que possam aumentar suas durezas, além de tratamentos térmicos que protegem do des-
gaste e corrosão.
De um modo geral, as correntes são utilizadas quando a transmissão por engrenagens
ou por correias não sejam possíveis, seja por longas distâncias entre eixos, seja por alto torque
Figura 3: Diversos perfis de correias. Fonte: http://www.liningcomponents.fi/en/power-
transmission/belt-drives/belts-megadyne/
15
empregado; necessidade de lubrificação constante para combater a corrosão; ou ainda por
outros fatores.
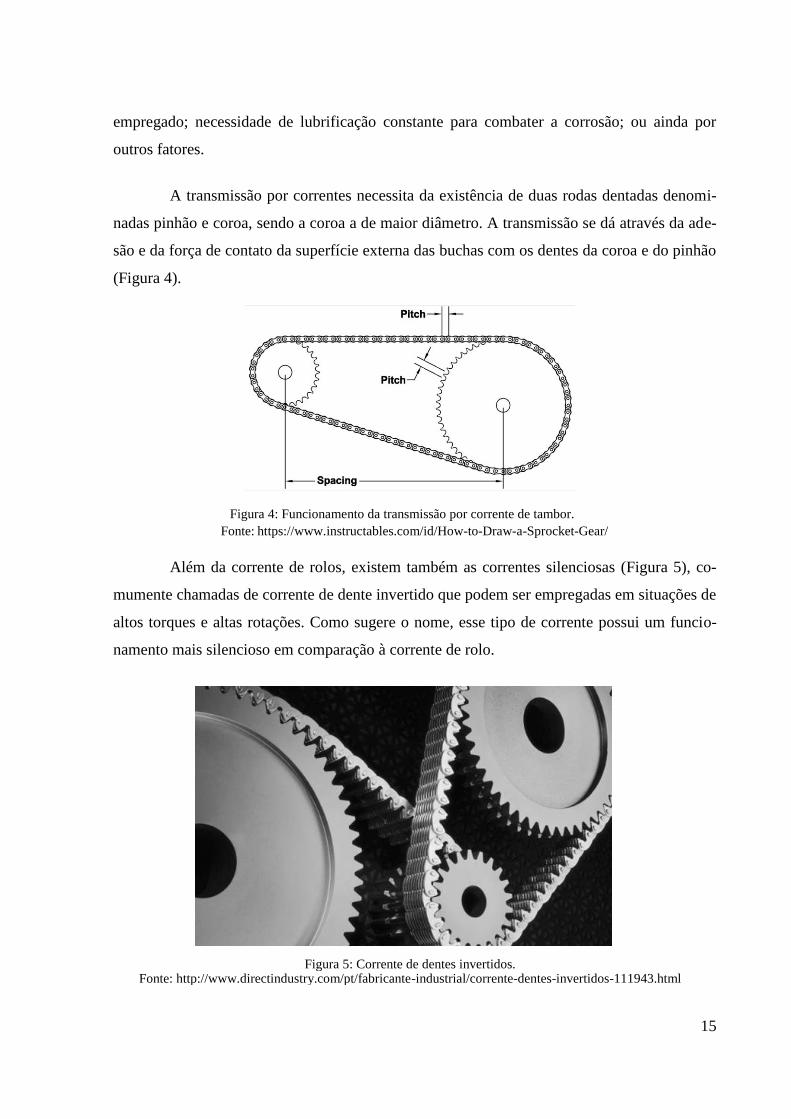
A transmissão por correntes necessita da existência de duas rodas dentadas denomi-
nadas pinhão e coroa, sendo a coroa a de maior diâmetro. A transmissão se dá através da ade-
são e da força de contato da superfície externa das buchas com os dentes da coroa e do pinhão
(Figura 4).
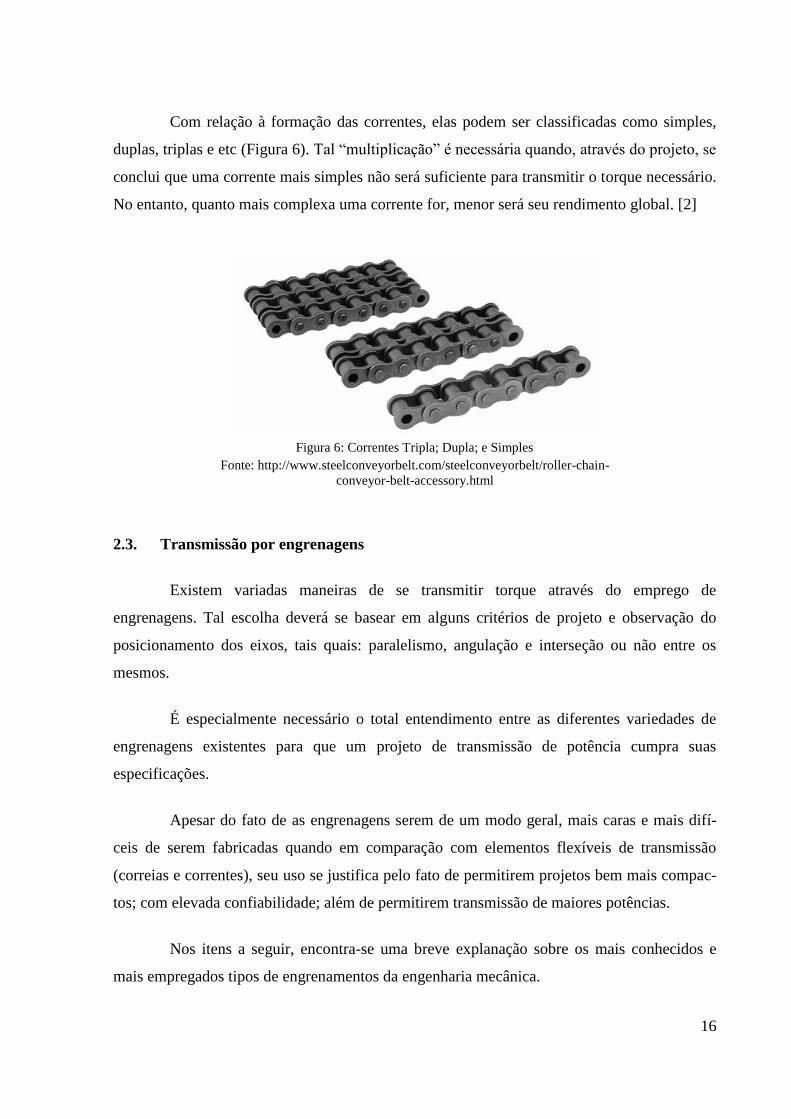
Além da corrente de rolos, existem também as correntes silenciosas (Figura 5), co-
mumente chamadas de corrente de dente invertido que podem ser empregadas em situações de
altos torques e altas rotações. Como sugere o nome, esse tipo de corrente possui um funcio-
namento mais silencioso em comparação à corrente de rolo.
Figura 4: Funcionamento da transmissão por corrente de tambor. Fonte: https://www.instructables.com/id/How-to-Draw-a-Sprocket-Gear/
Fonte: http://www.directindustry.com/pt/fabricante-industrial/corrente-dentes-invertidos-111943.html Figura 5: Corrente de dentes invertidos.
16
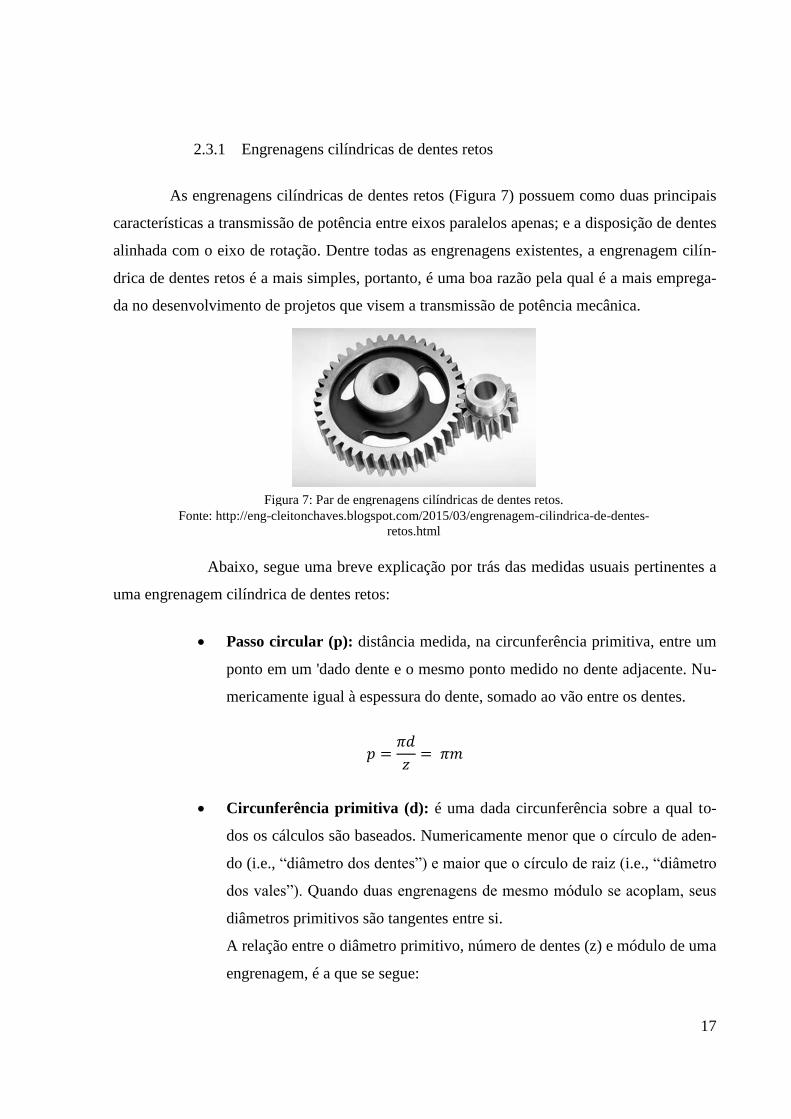
Com relação à formação das correntes, elas podem ser classificadas como simples,
duplas, triplas e etc (Figura 6). Tal “multiplicação” é necessária quando, através do projeto, se
conclui que uma corrente mais simples não será suficiente para transmitir o torque necessário.
No entanto, quanto mais complexa uma corrente for, menor será seu rendimento global. [2]
2.3. Transmissão por engrenagens
Existem variadas maneiras de se transmitir torque através do emprego de
engrenagens. Tal escolha deverá se basear em alguns critérios de projeto e observação do
posicionamento dos eixos, tais quais: paralelismo, angulação e interseção ou não entre os
mesmos.
É especialmente necessário o total entendimento entre as diferentes variedades de
engrenagens existentes para que um projeto de transmissão de potência cumpra suas
especificações.
Apesar do fato de as engrenagens serem de um modo geral, mais caras e mais difí-
ceis de serem fabricadas quando em comparação com elementos flexíveis de transmissão
(correias e correntes), seu uso se justifica pelo fato de permitirem projetos bem mais compac-
tos; com elevada confiabilidade; além de permitirem transmissão de maiores potências.
Nos itens a seguir, encontra-se uma breve explanação sobre os mais conhecidos e
mais empregados tipos de engrenamentos da engenharia mecânica.
Fonte: http://www.steelconveyorbelt.com/steelconveyorbelt/roller-chain-
conveyor-belt-accessory.html
Figura 6: Correntes Tripla; Dupla; e Simples
17
Engrenagens cilíndricas de dentes retos 2.3.1
As engrenagens cilíndricas de dentes retos (Figura 7) possuem como duas principais
características a transmissão de potência entre eixos paralelos apenas; e a disposição de dentes
alinhada com o eixo de rotação. Dentre todas as engrenagens existentes, a engrenagem cilín-
drica de dentes retos é a mais simples, portanto, é uma boa razão pela qual é a mais emprega-
da no desenvolvimento de projetos que visem a transmissão de potência mecânica.
Abaixo, segue uma breve explicação por trás das medidas usuais pertinentes a
uma engrenagem cilíndrica de dentes retos:
Passo circular (p): distância medida, na circunferência primitiva, entre um
ponto em um 'dado dente e o mesmo ponto medido no dente adjacente. Nu-
mericamente igual à espessura do dente, somado ao vão entre os dentes.
𝑝 =𝜋𝑑
𝑧= 𝜋𝑚
Circunferência primitiva (d): é uma dada circunferência sobre a qual to-
dos os cálculos são baseados. Numericamente menor que o círculo de aden-
do (i.e., “diâmetro dos dentes”) e maior que o círculo de raiz (i.e., “diâmetro
dos vales”). Quando duas engrenagens de mesmo módulo se acoplam, seus
diâmetros primitivos são tangentes entre si.
A relação entre o diâmetro primitivo, número de dentes (z) e módulo de uma
engrenagem, é a que se segue:
Figura 7: Par de engrenagens cilíndricas de dentes retos. Fonte: http://eng-cleitonchaves.blogspot.com/2015/03/engrenagem-cilindrica-de-dentes-
retos.html

18
𝑑 = 𝑚𝑧
Módulo (m): medida ancorada no Sistema Internacional de unidades que
representa a razão entre o passo diametral e o número de dentes da engrena-
gem. Sua medida é o milímetro.
Passo diametral (P): razão entre o número de dentes e o diâmetro primiti-
vo.
𝑃 =𝑧
𝑑
Dedendo (b): distância radial entre o círculo de raiz e o círculo primitivo.
𝑏 = 1,25𝑚
Adendo (a): distância radial entre o círculo primitivo e o topo do dente
𝑎 = 𝑚
Folga (c): medida a qual o dedendo em uma engrenagem excede o adendo
de sua engrenagem par.
𝑐 = 𝑏 − 𝑎
Ângulo de pressão: é o ângulo formado pela linha da ação da força e a per-
pendicular que une os centros das engrenagens. Usualmente usado 20 ou
25º.
Quanto ao perfil dos dentes de uma engrenagem, uma involuta (também chamada de
envolvente) é a curva que corta todas tangentes de outra curva em dentes retos. Comumente
encontrado nos perfis das engrenagens pois, satisfazendo o princípio da ação conjugada,
permite um engrenamento em velocidade constante.
19
Engrenagens cilíndricas de dentes helicoidais 2.3.2
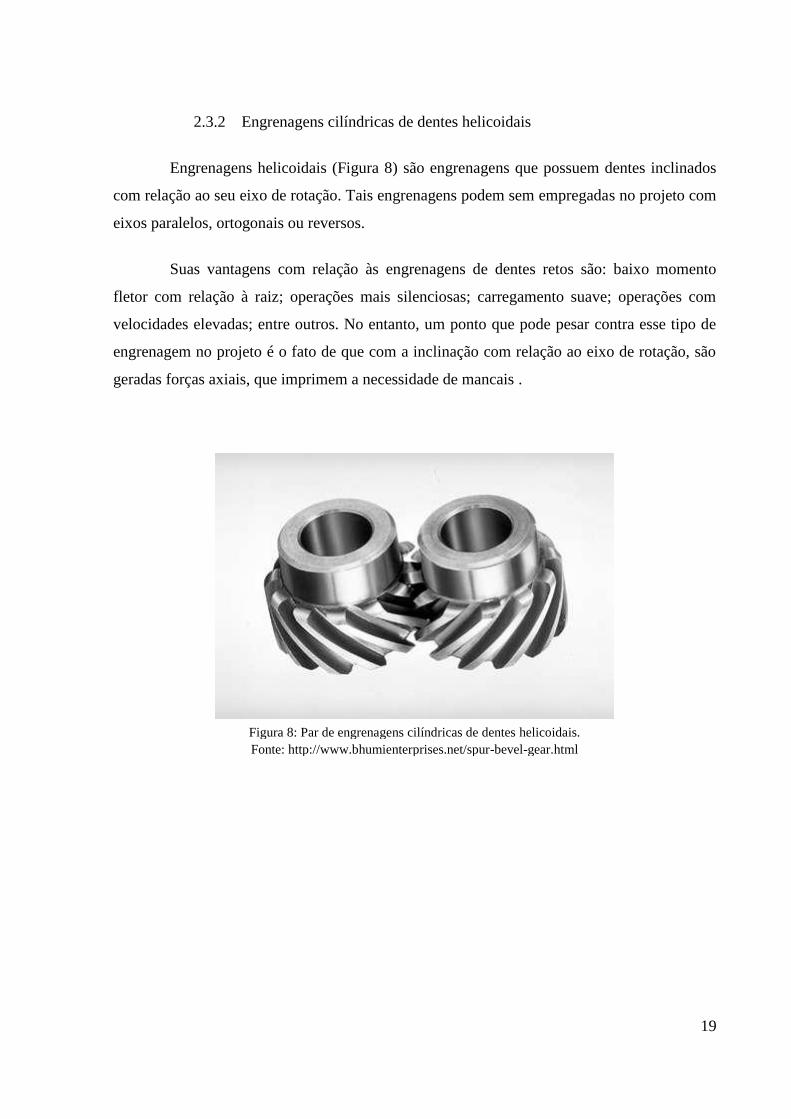
Engrenagens helicoidais (Figura 8) são engrenagens que possuem dentes inclinados
com relação ao seu eixo de rotação. Tais engrenagens podem sem empregadas no projeto com
eixos paralelos, ortogonais ou reversos.
Suas vantagens com relação às engrenagens de dentes retos são: baixo momento
fletor com relação à raiz; operações mais silenciosas; carregamento suave; operações com
velocidades elevadas; entre outros. No entanto, um ponto que pode pesar contra esse tipo de
engrenagem no projeto é o fato de que com a inclinação com relação ao eixo de rotação, são
geradas forças axiais, que imprimem a necessidade de mancais .
Figura 8: Par de engrenagens cilíndricas de dentes helicoidais. Fonte: http://www.bhumienterprises.net/spur-bevel-gear.html
20
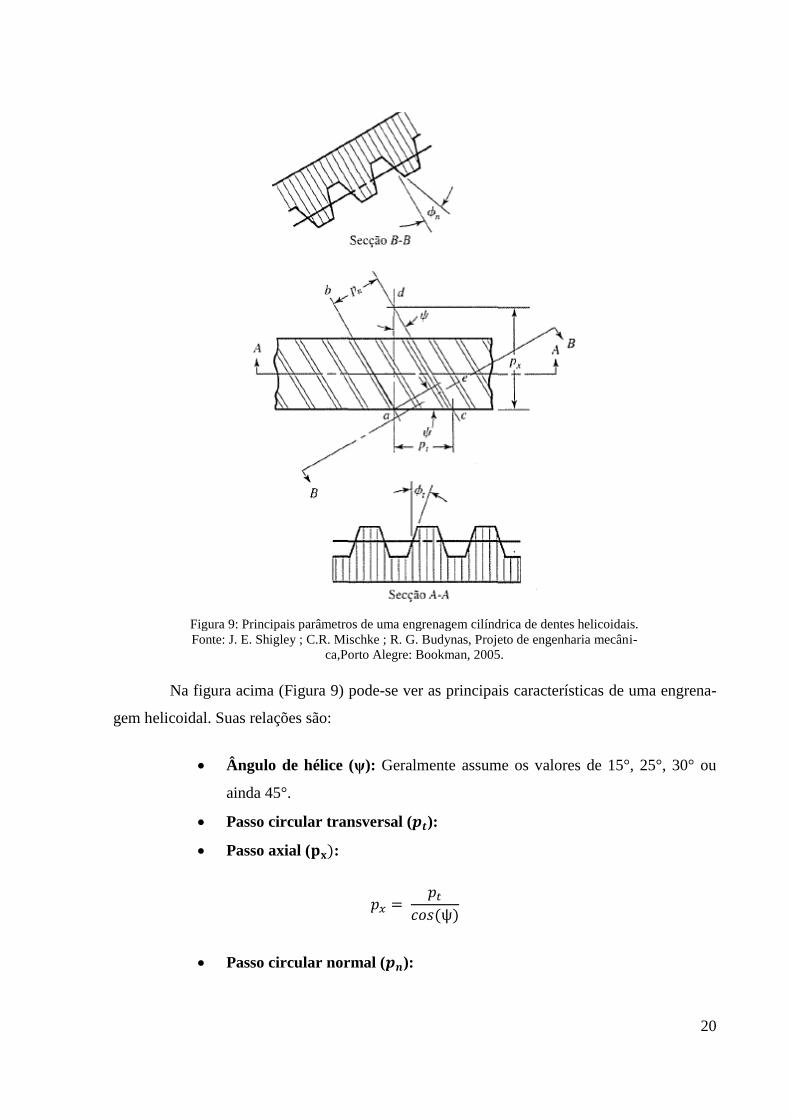
Na figura acima (Figura 9) pode-se ver as principais características de uma engrena-
gem helicoidal. Suas relações são:
Ângulo de hélice (ψ): Geralmente assume os valores de 15°, 25°, 30° ou
ainda 45°.
Passo circular transversal (𝒑𝒕):
Passo axial (𝐩𝐱):
𝑝𝑥 = 𝑝𝑡
𝑐𝑜𝑠(ψ)
Passo circular normal (𝒑𝒏):
Figura 9: Principais parâmetros de uma engrenagem cilíndrica de dentes helicoidais. Fonte: J. E. Shigley ; C.R. Mischke ; R. G. Budynas, Projeto de engenharia mecâni-
ca,Porto Alegre: Bookman, 2005.
21
𝑝𝑛 = 𝑝𝑡 𝑐𝑜𝑠(ψ)
Passo diametral normal (𝑷𝒏):
Uma vez que 𝑃𝑛𝑝𝑛 = 𝜋, tem-se que: 𝑃𝑛 = 𝑃𝑡
cos (ψ)
Ângulo de pressão normal (𝝋𝒏) e ângulo de pressão tangencial (𝝋𝒕):
𝑐𝑜𝑠(ψ) = tan (𝜑𝑛)
tan (𝜑𝑡)
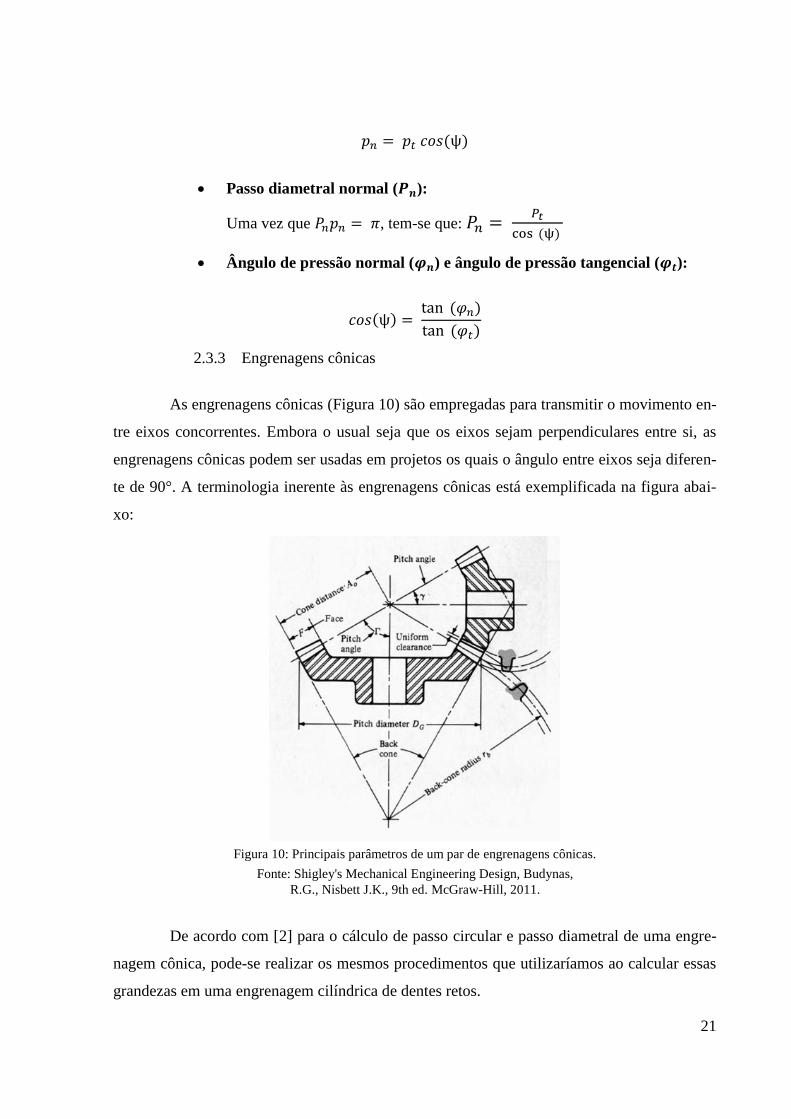
Engrenagens cônicas 2.3.3
As engrenagens cônicas (Figura 10) são empregadas para transmitir o movimento en-
tre eixos concorrentes. Embora o usual seja que os eixos sejam perpendiculares entre si, as
engrenagens cônicas podem ser usadas em projetos os quais o ângulo entre eixos seja diferen-
te de 90°. A terminologia inerente às engrenagens cônicas está exemplificada na figura abai-
xo:
De acordo com [2] para o cálculo de passo circular e passo diametral de uma engre-
nagem cônica, pode-se realizar os mesmos procedimentos que utilizaríamos ao calcular essas
grandezas em uma engrenagem cilíndrica de dentes retos.
Figura 10: Principais parâmetros de um par de engrenagens cônicas.
Fonte: Shigley's Mechanical Engineering Design, Budynas,
R.G., Nisbett J.K., 9th ed. McGraw-Hill, 2011.
22
O ângulo primitivo do pinhão (γ) e o ângulo primitivo da coroa (Γ) são determinados
através de uma simples razão envolvendo o número de dentes da coroa (𝑁𝑔) e o número de
dentes do pinhão (𝑁𝑝) da seguinte maneira:
tan 𝛾 = 𝑁𝑝
𝑁𝑔⁄
tan Γ = 𝑁𝑔
𝑁𝑝⁄

23
3 MECANISMOS DE TRANSMISSÃO DE POTÊNCIA MECÂNICA
Engrenagens; polias; correias; entre outros são apenas meios que por si só não
realizam a transmissão de torque e potência. Para que tal ocorra, é necessário de um
mecanismo que através de jogos de engenagens, combinações polia-correia e/ou pinhão-
corrente, faça com que o fluxo de potência siga o caminho adequado.
Abaixo estão listados os mais importantes e destacados meios de transmissão de
potência entre a unidade motriz e o diferencial que são encontrados em automóveis nos dias
de hoje. Claramente existem outros, mas como o escopo deste trabalho não é a descrição de
todas as maneiras de transmissão de potência, foram escolhidos apenas alguns mais
importantes.
3.1. Transmissão manual
Assíncrona 3.3.1
A transmissão assíncrona, mais conhecida como transmissão manual, ou ainda
transmissão em H é um mecanismo de variação escalonado de velocidades desenvolvido
primeiramente para dar ao condutor a possibilidade de optar manualmente, através de
alavancas por maior ou menor velocidade ou torque em função das condições e carga do
veículo e do terreno em que ele trafega, para que assim, obtenha uma maior eficiencia em
relação ao consumo de combustível e tempo gasto.
Este sistema é composto de quatro componentes principais: disco de embreagem;
eixo do motor; eixo do diferencial; eixo secundário, que possui engrenagens livres; e o
mecanismo de seleção das marchas, que constitui-se de (trambulador, eixos seletores e garfos
de seleção).
A marcha desejada é escolhida através da uma alavanca que, ao acionar o
trambulador, faz com que o garfo, que por sua vez está fixo no eixo, mova o anel
sincronizador para frente ou para trás. O anel sincronizador, que cede parte de seu nome a
esse modo de transmissão, por sua vez, tem a função de igualar a velocidade de dois pares de
engrenagens para que haja o perfeito encaixe sem causar solavancos e/ou choques,
possibilitando a troca de marcha suavemente.
24
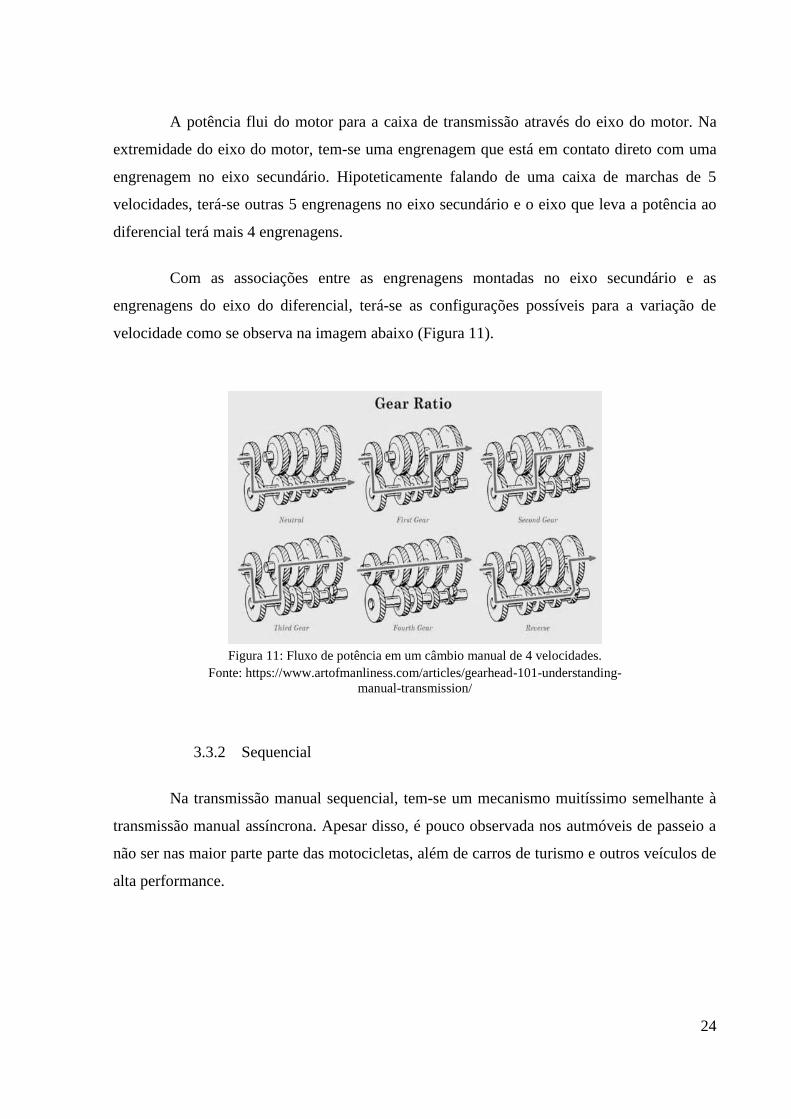
A potência flui do motor para a caixa de transmissão através do eixo do motor. Na
extremidade do eixo do motor, tem-se uma engrenagem que está em contato direto com uma
engrenagem no eixo secundário. Hipoteticamente falando de uma caixa de marchas de 5
velocidades, terá-se outras 5 engrenagens no eixo secundário e o eixo que leva a potência ao
diferencial terá mais 4 engrenagens.
Com as associações entre as engrenagens montadas no eixo secundário e as
engrenagens do eixo do diferencial, terá-se as configurações possíveis para a variação de
velocidade como se observa na imagem abaixo (Figura 11).
Sequencial 3.3.2
Na transmissão manual sequencial, tem-se um mecanismo muitíssimo semelhante à
transmissão manual assíncrona. Apesar disso, é pouco observada nos autmóveis de passeio a
não ser nas maior parte parte das motocicletas, além de carros de turismo e outros veículos de
alta performance.
Figura 11: Fluxo de potência em um câmbio manual de 4 velocidades. Fonte: https://www.artofmanliness.com/articles/gearhead-101-understanding-
manual-transmission/
25
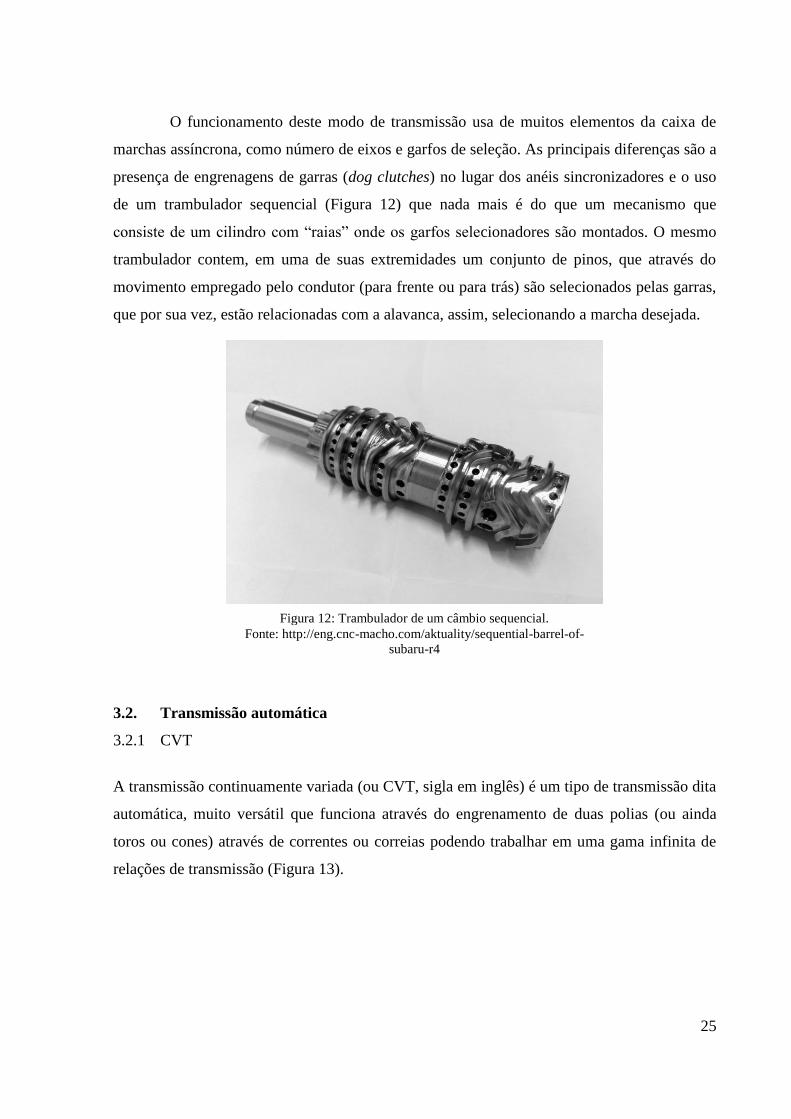
O funcionamento deste modo de transmissão usa de muitos elementos da caixa de
marchas assíncrona, como número de eixos e garfos de seleção. As principais diferenças são a
presença de engrenagens de garras (dog clutches) no lugar dos anéis sincronizadores e o uso
de um trambulador sequencial (Figura 12) que nada mais é do que um mecanismo que
consiste de um cilindro com “raias” onde os garfos selecionadores são montados. O mesmo
trambulador contem, em uma de suas extremidades um conjunto de pinos, que através do
movimento empregado pelo condutor (para frente ou para trás) são selecionados pelas garras,
que por sua vez, estão relacionadas com a alavanca, assim, selecionando a marcha desejada.
3.2. Transmissão automática
3.2.1 CVT
A transmissão continuamente variada (ou CVT, sigla em inglês) é um tipo de transmissão dita
automática, muito versátil que funciona através do engrenamento de duas polias (ou ainda
toros ou cones) através de correntes ou correias podendo trabalhar em uma gama infinita de
relações de transmissão (Figura 13).
Figura 12: Trambulador de um câmbio sequencial. Fonte: http://eng.cnc-macho.com/aktuality/sequential-barrel-of-
subaru-r4

26
O CVT que emprega polias, daí o nome pelo qual é conhecido: CVT por polias
expansivas ou ainda VDP (sigla em inglês para polias de diâmetro variável), funciona –em
termos gerais- da seguinte maneira: a movimentação no sentido do eixo de cada parte
bipartida de cada polia faz com que o raio da correia sofra um decréscimo, caso haja um
afastamento entre os hemisférios. No caso de aproximação entre as metades, o resultado será
um aumento do raio da correia. Quando tem-se a aproximação das partes bipartidas de uma
polia, na polia conjugada se observará o afastamento, o que permitirá a denominada variação
de velocidade contínua dentro da faixa de valores estabelecida no projeto, que nomeia o
sistema.
O CVT Toroidal é um fruto da montagem de por discos e roletes, no qual a potência
é transmitida através do movimento de revolução dos discos, onde um é o disco de entrada e
outro é o disco de saída do sistema. A montagem é feita com os roletes sendo “assentados”
dentro do lado côncavo formado pela justaposição dos dois discos um de frente para o outro,
sem se tocarem, no entanto. Uma representação da disposição é dada na figura abaixo.
Já por sua vez, a figura 14 explica de uma maneira visual como as diferentes
configurações de posição dos roletes influenciam a velocidade angular do disco –e, por
Figura 13: Funcionamento de um câmbio CVT de polias. Fonte: https://global.yamaha-motor.com/about/technology/spread/003
Figura 14: Funcionamento de um câmbio CVT toroidal. Fonte: https://www.slideshare.net/ZOTTY/cvt-22405389

27
consequência- do eixo de saída, com relação ao disco/eixo de entrada. Caso tenhamos uma
configuração onde as faces de ambos os roletes estejam paralelas entre si, ou seja, caso os
“diâmetros de contato”, assim por se dizer sejam os mesmos, terá-se uma relação de
transmissão 1:1.
No caso de os roletes estarem arranjados de um modo a promoverem um maior
diâmetro de contato no disco de entrada do que nos de saída, terá-se uma marcha rápida.
Consequentemente, caso tenhamos um diâmetro de contato maior no disco de saída do que o
observado no disco de entrada, terá-se uma marcha lenta.
Outro mecanismo de transmissão variável de velocidade, o CVT cônico, ou ainda
CVT de fricção faz uso de dois cones idênticos montados no mesmo sentido, mas com
direções opostas e correias ou correntes como interface entre os cones. Tais elementos de
transmissão são responsáveis pela variação de diâmetro entre os cones de acordo com a
posição a qual eles se encontram. A figura 15 demonstra de maneira visual o funcionamento
do CVT cônico.
Utilizada principalmente em veículos de pequeno porte como motocicletas, motos
aquáticas, carrinhos de golfe, entre outros, possui como maiores vantagens o melhor controle
de rotação do que em uma transmissão convencional, além de possuir troca de marchas
suaves, eliminando os trancos e choques entre velocidades. No entanto seus maiores defeitos
são: Alto custo de manutenção e limitado à veículos de baixo torque devido ao risco de
escorregamento.
Figura 15: Representação de um CVT cônico. Fonte: https://www.youtube.com/watch?v=MhFK5gfAGpM

28
3.2.2. Dupla embreagem
O Sistema de dupla embreagem (DCT – Dual clutch transmission) é um sistema
eletronicamente controlado de troca de marchas que faz uso de múltiplos eixos, bem como
sistemas hidráulicos de engrenamento por atrito (Figura 16) para atingir a suas premissas, que
são: economia de combustível e trocas de marchas extremamente rápidas, beirando os 60
milissegundos. [3]
Ao longo da história, múltiplos fabricantes de automóveis e empresas especializadas
em caixas de transmissão desenvolveram múltiplos arranjos para transmissões de dupla
embreagem. No entanto uma em especial, a PDK – Porsche Doppelkupplung- se destacou no
mercado por sua confiabilidade e será usada como modelo aqui para exemplificação do
mecanismo de um modo geral.
Em linhas gerais, uma transmissão DCT nada mais é do que duas subtransmissões
“manuais” que trabalham de maneira conjunta, sendo engrenadas, quando requisitadas por um
sistema de controle (neste caso, a ECU), através de um sistema de discos de fricção. Como o
nome pode vir a sugerir, este sistema conta com duas embreagens, i.e. dois sistemas de discos
de fricção que de maneira independente um do outro,um para as marchas ímpares e outro para
as marchas pares, regulam dois eixos diferentes posicionados concenctricamente com um eixo
macicço e outro vazado. Quando uma embreagem está acionada, ou seja, quando os discos de
fricção estão, de fato, atritando uns contra os outros, faz com o seu respectivo eixo esteja em
acionamento.
Figura 16: Conjunto de discos de fricção. Fonte: https://www.amazon.ca/Rivera-Primo-Clutch-Brute-2048-0053/dp/B00M9MRAAK

29
Deste modo, quando uma marcha (por exemplo, a terceira) está em uso, tanto a
quarta quando a segunda, ou ainda a sexta –caso a caixa de marcha possua- já estão pré-
selecionadas. O que vai determinar qual das duas será usada é a leitura dos parâmetros feito
pelo sistema eletrohidráulico através da abertura do câmbio de borboleta; rotação do motor;
pressão no cilindro-mestre; entre outros para interpretar se o carro está acelerando ou freando
e se precisa aumentar ou reduzir a marcha do veículo (Figura 17).
Figura 17: Fluxo de potência em uma transmissão de dupla embreagem. Fonte: https://www.autoevolution.com/news/update-on-the-porsche-panamera-5099.html
30
4. CARACTERÍSTICAS GERAIS DO VEÍCULO
4.1. Dimensões e COG
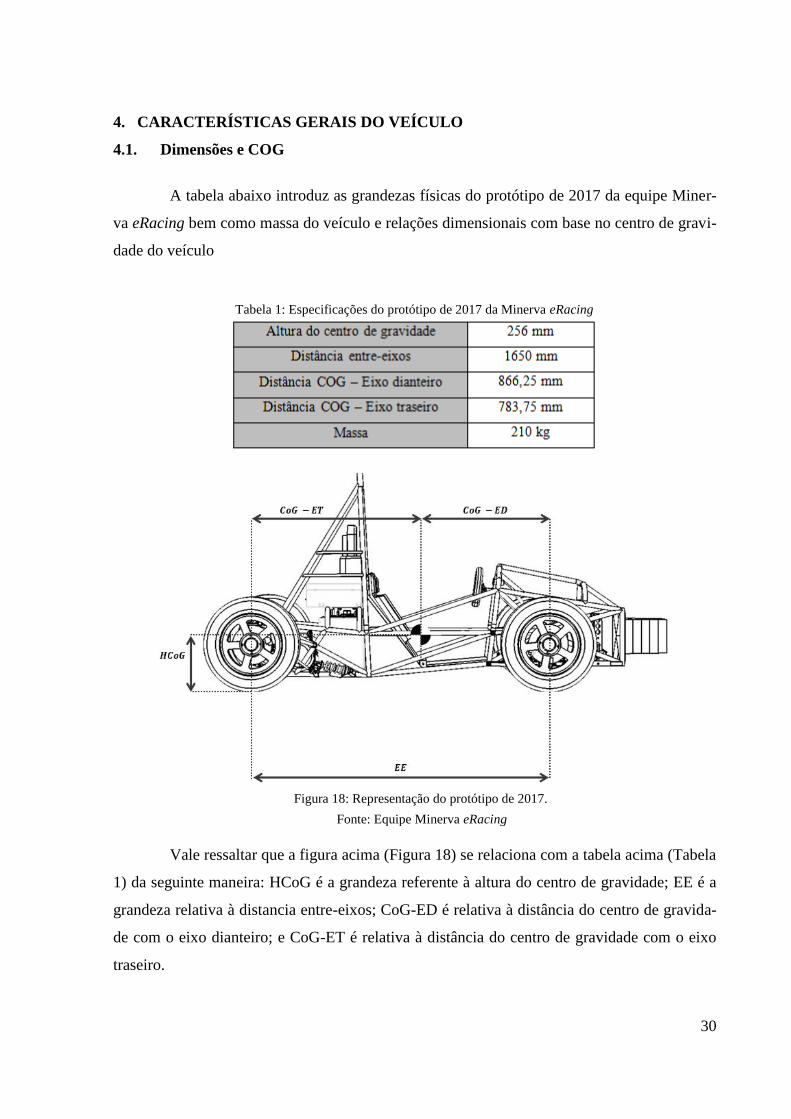
A tabela abaixo introduz as grandezas físicas do protótipo de 2017 da equipe Miner-
va eRacing bem como massa do veículo e relações dimensionais com base no centro de gravi-
dade do veículo
Vale ressaltar que a figura acima (Figura 18) se relaciona com a tabela acima (Tabela
1) da seguinte maneira: HCoG é a grandeza referente à altura do centro de gravidade; EE é a
grandeza relativa à distancia entre-eixos; CoG-ED é relativa à distância do centro de gravida-
de com o eixo dianteiro; e CoG-ET é relativa à distância do centro de gravidade com o eixo
traseiro.
Tabela 1: Especificações do protótipo de 2017 da Minerva eRacing
Figura 18: Representação do protótipo de 2017.
Fonte: Equipe Minerva eRacing
31
O pneu empregado no carro é o modelo da Michelin 16/55 R13 (S310 modelo slick e
P310 modelo de chuva). Tais pneus possuem como medidas: banda de rodagem de 216 mm;
perfil de 114,48 mm; e um diâmetro externo de 534 mm quando completamente cheio.
4.2. Especificações do motor e curvas
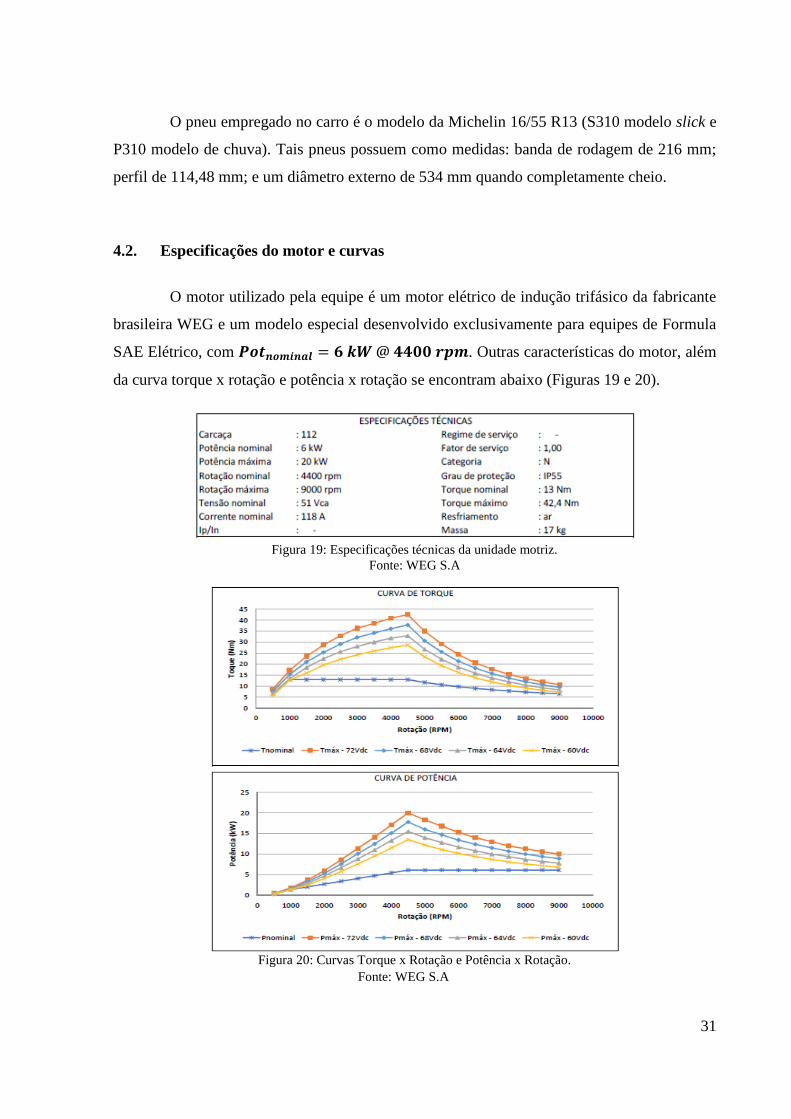
O motor utilizado pela equipe é um motor elétrico de indução trifásico da fabricante
brasileira WEG e um modelo especial desenvolvido exclusivamente para equipes de Formula
SAE Elétrico, com 𝑷𝒐𝒕𝒏𝒐𝒎𝒊𝒏𝒂𝒍 = 𝟔 𝒌𝑾 @ 𝟒𝟒𝟎𝟎 𝒓𝒑𝒎. Outras características do motor, além
da curva torque x rotação e potência x rotação se encontram abaixo (Figuras 19 e 20).
Figura 19: Especificações técnicas da unidade motriz.
Fonte: WEG S.A
Figura 20: Curvas Torque x Rotação e Potência x Rotação. Fonte: WEG S.A

32
O desenho técnico com as respectivas cotas e dimensões do motor já montado em
sua carcaça encontram-se anexado ao fim do projeto.
33
5. DIMENSIONAMENTO E SELEÇÃO DE COMPONENTES
5.1. Definição do torque máximo
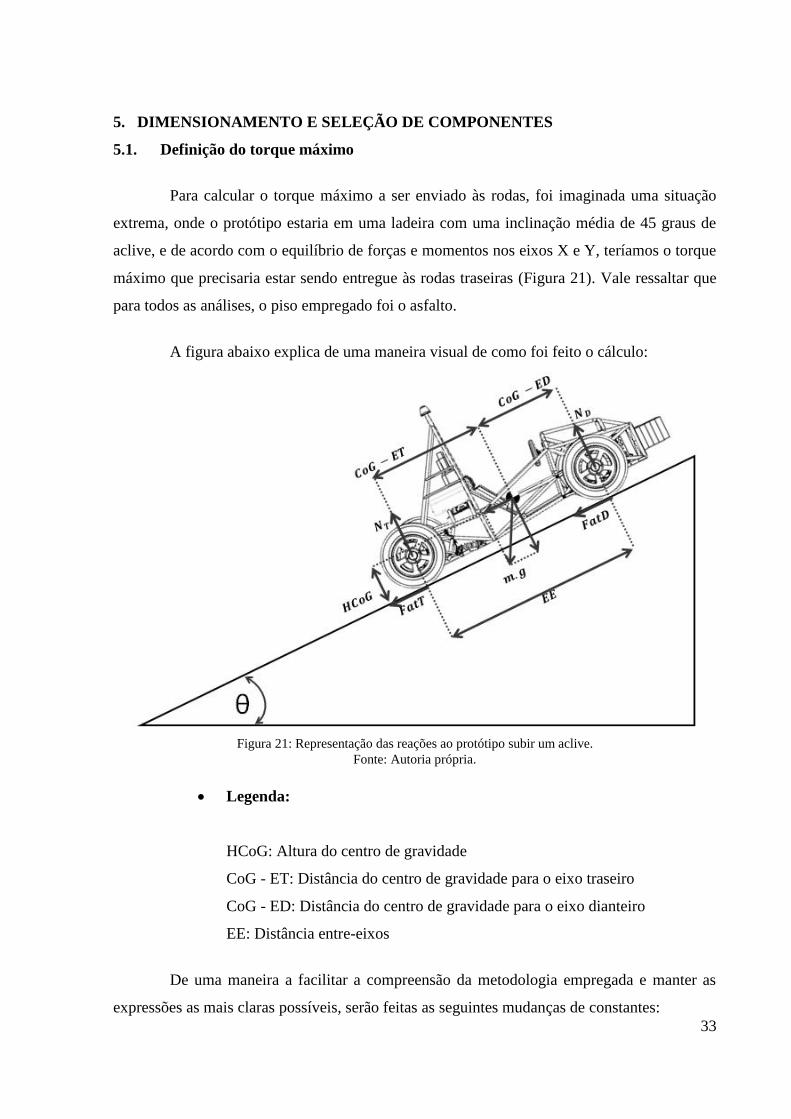
Para calcular o torque máximo a ser enviado às rodas, foi imaginada uma situação
extrema, onde o protótipo estaria em uma ladeira com uma inclinação média de 45 graus de
aclive, e de acordo com o equilíbrio de forças e momentos nos eixos X e Y, teríamos o torque
máximo que precisaria estar sendo entregue às rodas traseiras (Figura 21). Vale ressaltar que
para todos as análises, o piso empregado foi o asfalto.
A figura abaixo explica de uma maneira visual de como foi feito o cálculo:
Legenda:
HCoG: Altura do centro de gravidade
CoG - ET: Distância do centro de gravidade para o eixo traseiro
CoG - ED: Distância do centro de gravidade para o eixo dianteiro
EE: Distância entre-eixos
De uma maneira a facilitar a compreensão da metodologia empregada e manter as
expressões as mais claras possíveis, serão feitas as seguintes mudanças de constantes:
Figura 21: Representação das reações ao protótipo subir um aclive. Fonte: Autoria própria.

34
𝐻𝐶𝑜𝐺 → 𝐻
𝐶𝑜𝐺 − 𝐸𝑇 → 𝐴
𝐶𝑜𝐺 − 𝐸𝐷 → 𝐵
Dando prosseguimento com os cálculos, foi obtido:
∑ 𝐹𝑥 = 0 ∶ 𝐹𝑎𝑡𝐷 + 𝐹𝑎𝑡𝑇 = 𝑃𝑠𝑒𝑛(𝜃) [𝑒𝑞. 1]
∑ 𝐹𝑦 = 0 ∶ 𝑁𝐷 + 𝑁𝑇 = 𝑃𝑐𝑜𝑠(𝜃) [𝑒𝑞. 2]
∑ 𝑀𝐴 = 0 ∶ 𝑁𝑇 . 𝐸𝐸 = 𝑃(𝐵𝑐𝑜𝑠(𝜃) + 𝐻𝑠𝑒𝑛(𝜃)) [𝑒𝑞. 3]
Aplicando as equações 1 e 2 na equação 3, são obtidas as seguintes expressões:
𝑵𝑫 =𝒎. 𝒈 [(𝑬𝑬 − 𝑩) 𝐜𝐨𝐬(𝜽) − 𝑯𝒔𝒆𝒏(𝜽)]
𝑬𝑬
𝑵𝑻 =𝒎. 𝒈 [𝑩 𝐜𝐨𝐬(𝜽) + 𝑯𝒔𝒆𝒏(𝜽)]
𝑬𝑬
Onde, rearranjando os termos, é obtida a seguinte expressão para a força trativa total
mínima necessária:
𝑭𝑻𝒐𝒕𝒂𝒍 = 𝑴. 𝒂 + 𝑵𝑫. 𝝁 + 𝑵𝑻 . 𝝁 + 𝑭𝑹
Sendo 𝝁 o coeficiente de atrito e o solo, considerado, nesse caso, 0.6. E 𝑭𝑹 a força de
resistência ao rolamento.
Segundo [4] uma alternativa ao cálculo da força de tração necessária é dada pela so-
ma das forças associada à eventuais perdas como se segue:
𝑭𝑹: Força de resistência ao rolamento, causada pela deformação dos pneus e
pela adesão entre a borracha e o solo.

35
𝑭𝑨: Força de resistência aerodinâmica.
𝑭𝑮: Força de resistência devido à inclinação da pista.
𝝁: Coeficiente de atrito cinético entre o pneu e a pista
Onde:
𝑭𝑹 = 𝑴 𝐜𝐨𝐬(𝜽) . 𝟎, 𝟎𝟏𝟑 (𝟏 +𝑽
𝟏𝟎𝟎)
𝑭𝑮 = 𝑴 𝐬𝐞𝐧(𝜽)
𝑭𝑹 =𝟏
𝟐𝛒. 𝑽𝟐. 𝑪𝑫. 𝑨
E:
𝑴: Massa do veículo
𝑽: Velocidade final desejada
𝝆: Massa especifica do fluido
𝑪𝑫: Coeficiente do arrasto do veículo
𝑭𝒂: Área frontal do veículo
Entretanto, pensa-se ser uma estratégia mais conservadora levar em conta,
também, o atrito entre os pneus e o solo, visto que se estima que a interface solo-borracha é
responsável por em média 40-50% do desempenho de um veículo. Deste modo:
𝑭𝑻𝒐𝒕𝒂𝒍 = 𝑴. 𝒂 + 𝑭𝑅 + 𝑭𝑨 + 𝑭𝑮 + 𝑵𝑫. 𝝁 + 𝑵𝑻 . 𝝁
Escolhendo um estudo de caso onde desejamos que nosso carro, numa situa-
ção limite, precise subir uma ladeira de 45 graus de aclive, partindo de uma velocidade inicial
zero até 20 km/h em 15 segundos. Terá-se os seguintes valores:
𝑭𝑹 = 𝟑, 𝟒𝟐 𝑵
𝑭𝑮 = 𝟐𝟏𝟗, 𝟐𝟎 𝑵
𝑭𝑹 = 𝟖, 𝟒𝟑 𝑵
36
𝑭𝒂𝒕𝑻 = 𝟖𝟕𝟕, 𝟓𝟓 𝑵
𝑭𝒂𝒕𝑫 = 𝟒𝟏𝟐, 𝟗𝟑 𝑵
𝑭𝑻𝒐𝒕𝒂𝒍 = 𝟖𝟔𝟏, 𝟗𝟓 𝑵
Para o nosso caso, foram utilizados os seguintes valores: 𝝁 = 𝟎, 𝟔; 𝑪𝒅 = 𝟎, 𝟕𝟏;
𝑨 = 𝟎, 𝟔𝟓 𝒎²; e 𝝆 = 𝟏, 𝟐 𝒌𝒈/𝒎³.
Como tem-se uma roda de 13 polegadas de diâmetro, o raio efetivo é de
165,1mm o que multiplicando pela 𝑭𝑻𝒐𝒕𝒂𝒍 nos dá um torque 𝑻𝑻𝒓𝒂𝒔𝒆𝒊𝒓𝒐 de 142,31 N.m.
O diferencial utilizado pela equipe é um modelo usado no VW Gol que possui
uma relação de transmissão de 4:1. Assim, a caixa de marcha precisa entregar ao diferencial
na situação estudada, um torque quatro vezes menor que o torque 𝑻𝑻𝒓𝒂𝒔𝒆𝒊𝒓𝒐, ou seja, o termo
𝑻𝑫𝒊𝒇𝒆𝒓𝒆𝒏𝒄𝒊𝒂𝒍 é igual a 35,57 N.m.
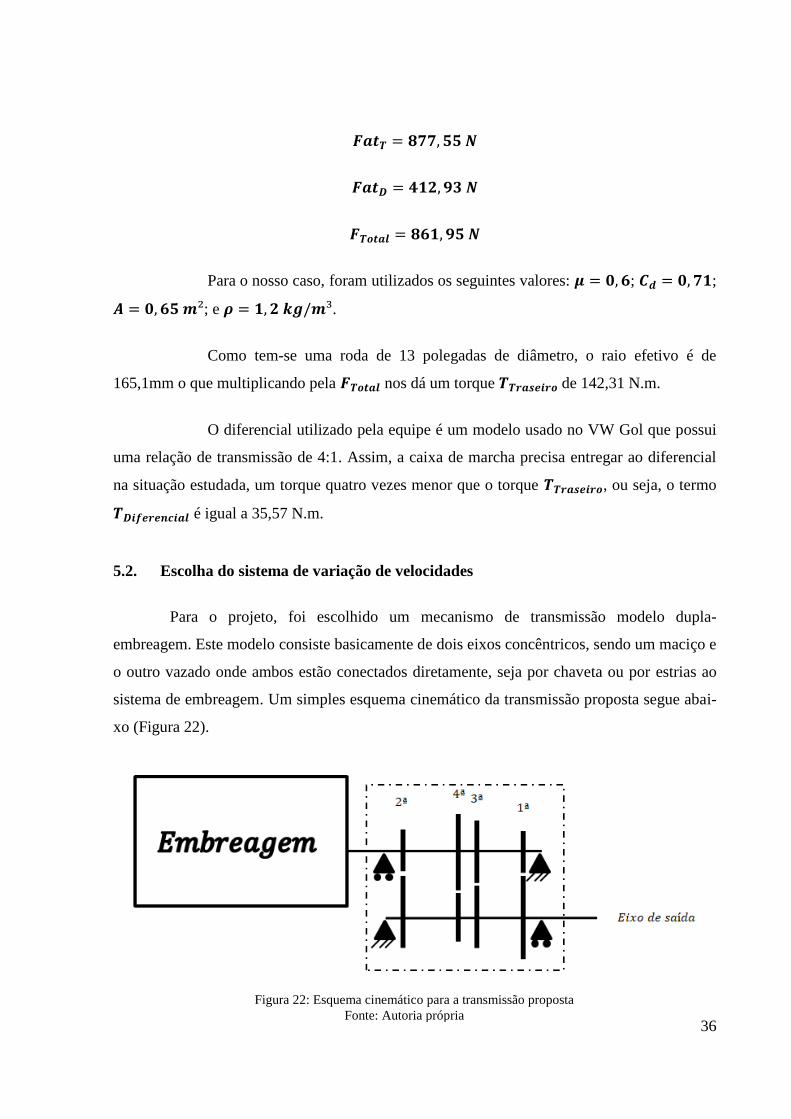
5.2. Escolha do sistema de variação de velocidades
Para o projeto, foi escolhido um mecanismo de transmissão modelo dupla-
embreagem. Este modelo consiste basicamente de dois eixos concêntricos, sendo um maciço e
o outro vazado onde ambos estão conectados diretamente, seja por chaveta ou por estrias ao
sistema de embreagem. Um simples esquema cinemático da transmissão proposta segue abai-
xo (Figura 22).
Figura 22: Esquema cinemático para a transmissão proposta Fonte: Autoria própria

37
O sistema de embreagem proposto é um mecanismo que conta com dois sistemas de
engrenamentos por discos de fricção, sendo um referente às marchas ímpares (eixo maciço) e
outro solidário à transmissão de potência para as marchas pares (eixo vazado). O acionamento
do sistema de fricção é feito através de uma bomba hidráulica com um sistema de válvula
direcional, que distribui o fluxo de óleo de acordo com a marcha a ser ativada. Tal sistema é
controlado computacionalmente através de um micro controlador Arduino que faz a leitura da
velocidade rotacional do eixo de saída e de acordo com o output, decide qual conjunto de dis-
cos de fricção acionar para que a marcha desejada seja empregada.
Ainda sobre o sistema de embreagem, cada eixo conta com seu próprio sistema de
mola de retorno para garantir que caso apenas haja engrenamentos dos discos, caso haja fluxo
de óleo. Caso este mesmo fluxo não exista, um colar de molas irá fazer com que a interface
disco-atuador não esteja em contato e, com isso, a potência não seja transmitida para o eixo
correspondente.
Vale ressaltar que para uma melhor visualização do sistema como um todo, a seção
dos anexos possui, logo como primeiro desenho, um desenho de conjunto em escala 1:1 ex-
plicitando o sistema como um todo e apontando cada elemento que o compõe. Tal seção con-
tem, ainda, os desenhos técnicos de cada elemento assinalado no desenho de conjunto supraci-
tado.
Este sistema conta com a vantagem de ser muito semelhante ao projeto de caixa de
marchas manuais em H, o que é um ponto positivo se for considerado a quantidade de biblio-
grafia e material de consulta disponível em comparação com outros modelos de transmissão,
como a Lepelletier ou Ravigneaux.
Por sua vez, a troca de marcha se dará pela leitura da velocidade de saída por um
conjunto de sensores e microcontrolador, que ao julgar necessária uma troca de marcha, acio-
nará um solenoide para sua posição avante ou a ré para que o sistema de sincronização faça o
que dele se espera e promova o acoplamento da engrenagem movida desejada com o eixo de
saída.

38
5.3. Determinação do diâmetro mínimo dos eixos
Para o desenvolvimento do cálculo dos diâmetros mínimos dos eixos de entrada, fo-
ram empregadas as teorias do critério de falha de Von Mises, conhecida por teoria da máxima
energia de distorção (TMED) e do critério de Soderberg, pois se trata de uma teoria mais con-
servadora segundo [2].
Para que fosse conferida leveza ao sistema e baixa inércia, o material designado para
os eixos foi a liga de alumínio Al-7075-T6, cujas propriedades são:
Limite de resistência à tração (𝑺𝒖𝒕): 524 MPa
Limite de escoamento (𝑺𝒚): 462 MPa
Como o critério desenvolvido por Richard Von Mises estabelece que a deformação
ocorre quando os componentes de tensão atuante em um corpo ultrapassam o limite de esco-
amento do material componente deste mesmo corpo, este critério é largamente aplicável a
materiais dúcteis, como os aços e ligas.
Para o cálculo usando TMED, a seguinte formula foi empregada:
𝑺𝒎𝒂𝒙 = √𝑺𝒂² + 𝟑. 𝑺𝒎² ≤ 𝑺𝒚
𝑭𝑺
Onde,
𝑺𝒂 = 𝟑𝟐. 𝑴
𝝅. 𝒅𝟑 𝒆 𝑺𝒎 =
𝟏𝟔. 𝑻
𝝅. 𝒅³, 𝒑𝒂𝒓𝒂 𝒆𝒊𝒙𝒐𝒔 𝒎𝒂𝒄𝒊ç𝒐𝒔
𝑺𝒂 = 𝟑𝟐. 𝑴. 𝒅𝒆
𝝅. (𝒅𝒆𝟒 − 𝒅𝒊
𝟒) 𝒆 𝑺𝒎 =
𝟏𝟔. 𝑻. 𝒅𝒆
𝝅. (𝒅𝒆𝟒 − 𝒅𝒊
𝟒), 𝒑𝒂𝒓𝒂 𝒆𝒊𝒙𝒐𝒔 𝒗𝒂𝒛𝒂𝒅𝒐𝒔
O fator de segurança escolhido para o dimensionamento foi:
𝑭𝑺 = 𝟒
O cálculo de 𝑺𝒆, limite de resistência a fadiga no local crítico, é feito da seguinte
maneira:

39
𝑺𝒆 = 𝒌𝒂. 𝒌𝒃. 𝒌𝒄. 𝒌𝒅. 𝒌𝒆. 𝒌𝒇. 𝑺′𝒆
Onde:
Fator de acabamento superficial: 𝑲𝒂 = 𝒂. 𝑺𝒖𝒕𝒃
Fator de tamanho: 𝑲𝒃 = 𝟏, 𝟐𝟒. 𝒅−𝟎,𝟏𝟎𝟕 𝒔𝒆 𝟐, 𝟕𝟗 < 𝒅 < 𝟓𝟏 𝒎𝒎
= 𝟏, 𝟓𝟏. 𝒅−𝟎,𝟏𝟓𝟕 𝒔𝒆 𝟓𝟏 < 𝒅 < 𝟐𝟓𝟒 𝒎𝒎
Fator de carregamento: 𝑲𝒄 = 𝟏, 𝒔𝒆 𝒇𝒍𝒆𝒙ã𝒐
= 𝟎, 𝟖𝟓, 𝒔𝒆 𝒂𝒙𝒊𝒂𝒍
= 𝟎, 𝟓𝟗, 𝒔𝒆 𝒕𝒐𝒓çã𝒐
Fator de temperatura: 𝑲𝒅 = 𝟏, 𝒑𝒂𝒓𝒂 𝑻 < 𝟑𝟓𝟎 °𝑪
Fator de confiabilidade: 𝑲𝒆 = 𝟎, 𝟖𝟏𝟒, 𝒑𝒂𝒓𝒂 𝒄𝒐𝒏𝒇𝒊𝒂𝒃𝒊𝒍𝒊𝒅𝒂𝒅𝒆 𝒅𝒆 𝟗𝟗 %
Fator de efeitos diversos: 𝑲𝒇 =𝟐
𝟏+𝑺′𝒆𝑺𝒖𝒕
Limite de resistência à fadiga do corpo de prova:
𝑺′𝒆 = 𝟕𝟒𝟎, 𝒔𝒆 𝑺𝒖𝒕 > 𝟏𝟒𝟔𝟎 𝑴𝑷𝒂
= 𝟎, 𝟓. 𝑺𝒖𝒕, 𝒔𝒆 𝑺𝒖𝒕 < 𝟏𝟒𝟔𝟎 𝑴𝑷𝒂
Substituindo os valores, foi obtido um 𝑺𝒆 = 𝟐𝟔𝟕 𝑴𝑷𝒂.
De acordo com o fabricante do motor, o torque nominal a ser entregue pelo motor é
de 13 N.m e, de acordo com os diagramas de esforços, no eixo maciço, o maior momento pos-
sível foi de 22,53 N.m, portanto, substituindo os valores nas equações referentes à teoria de
Von Mises, tem-se que:
𝒅𝒎𝒊𝒏𝒎𝒂𝒄𝒊ç𝒐= 𝟐𝟑, 𝟔 𝒎𝒎
40
Para o eixo vazado, isto é, o eixo referente às marchas pares, como possuímos uma
condição geométrica para tal de que o diâmetro interno deverá ser no mínimo igual ao diâme-
tro externo rolamento exterior ao eixo maciço, uma vez que eles são concêntricos, partimos de
um diâmetro interno de 42 mm para que se pudesse encontrar o diâmetro externo mínimo.
Substituindo os valores no critério de Von Mises, foi encontrada a seguinte medida para o
diâmetro externo:
𝒅𝒎𝒊𝒏𝒗𝒂𝒛𝒂𝒅𝒐= 𝟒𝟓, 𝟕 𝒎𝒎
Para o caso da teoria de Soderberg, foi usada a seguinte formula:
𝑺𝒂
𝑺𝒆+
𝑺𝒎
𝑺𝒚≤
𝟏
𝑭𝑺
Empregando os valores de 𝑺𝒂 e 𝑺𝒎 discutidos acima para os eixos vazado e maciço,
foi encontrado:
𝒅𝒎𝒊𝒏𝒎𝒂𝒄𝒊ç𝒐= 𝟏𝟔, 𝟐 𝒎𝒎
De maneira análoga ao cálculo dos diâmetros mínimos para o TMED, o ponto de
partida para o cálculo para o eixo vazado foi a escolha do diâmetro interno. Nesse caso, o di-
âmetro escolhido foi 46 mm. O que nos forneceu
𝒅𝒎𝒊𝒏𝒗𝒂𝒛𝒂𝒅𝒐= 𝟒𝟓, 𝟑 𝒎𝒎
Vale ressaltar que todos os diagramas de esforços necessários ao dimensionamento
de ambos os eixos estão anexados neste mesmo projeto.
Por sua vez, o projeto do diâmetro mínimo para o eixo de saída é, em muitos
aspectos, similar ao projeto do eixo das marchas ímpares, devido ao fato de se tratarem de
dois eixos maciços. Assim, as únicas diferenças será o momento máximo admissível devido
às posições dos apoios (i.e., rolamentos). Logo, de acordo com os diagramas de esforços em
anexo, o maior momento para o eixo de saída foi de 𝑴𝒂 = 𝟐𝟏, 𝟕𝟒 𝑵. 𝒎.
41
Desta maneira, pela teoria da máxima energia de distorção (TMED), o diâme-
tro mínimo para o eixo de saída é de:
𝒅𝒎𝒊𝒏𝒆𝒊𝒙𝒐 𝒅𝒆 𝒔𝒂í𝒅𝒂= 𝟐𝟗, 𝟑 𝒎𝒎
Seguindo a linha de raciocínio proposta, foi calculado, também, o diâmetro mí-
nimo seguinte a teoria de falha de Soderberg, que nos forneceu aproximadamente:
𝒅𝒎𝒊𝒏𝒆𝒊𝒙𝒐 𝒅𝒆 𝒔𝒂í𝒅𝒂= 𝟐𝟎, 𝟒 𝒎𝒎
Como verá-se adiante, o diâmetro mínimo do eixo de saída na região dos sin-
cronizadores precisa ser de no mínimo 31,25 mm, pois esse é o valor referente ao diâmetro do
eixo para o sincronizador comercial proposto. Portanto, o valor nominal de 30 mm atende os
requisitos de projeto.
5.4. Projeto das engrenagens
Para o projeto em questão serão selecionadas engrenagens de dentes retos devido à
facilidade de fabricação e proximidade com as caixas de marcha manuais encontradas em
motocicletas comerciais, onde tais engrenagens possuirão ângulo de pressão igual a 20º. Com
isso, segundo recomendação da AGMA o número mínimo de dentes do pinhão é de 18.
As relações de transmissão escolhidas foram determinadas com o intuito principal de
o protótipo possuir um alto torque na primeira marcha devido ao fato de a competição de
Formula SAE prezar muito mais por rápidas retomadas e acelerações do que velocidade final,
propriamente dita. Além disso, foi de desejo ter a terceira marcha com uma relação de trans-
missão de 1:1 (direct drive).
Tabela 2: Relação de transmissão

42
Segundo (DIAS, 2011, p.32-33) é possível à construção de um gráfico para nos auxi-
liar no entendimento de quais velocidades final do carro terá-se para as escolhas de relação de
marcha escolhida. De acordo com a referência acima, pode-se usar as seguintes formulas para
o cálculo:
𝒗𝒎𝒂𝒙 =𝒏𝒎𝒂𝒙. 𝒓𝒓
𝒊𝒎. 𝒊𝒅𝒊𝒇 . 𝟎, 𝟑𝟕𝟕
𝒏𝒕𝒓𝒐𝒄𝒂 = 𝒏𝒎𝒂𝒙.𝒊𝒎
𝒊𝒎−𝟏
Onde, essas fórmulas nos forneceram os seguintes dados de saída para cada
marcha:
Desta forma, foi possível criar um gráfico que relaciona a velocidade atual do carro;
rotação atual do motor; a redução da rotação devido à troca; e em qual marcha o carro se en-
contra.
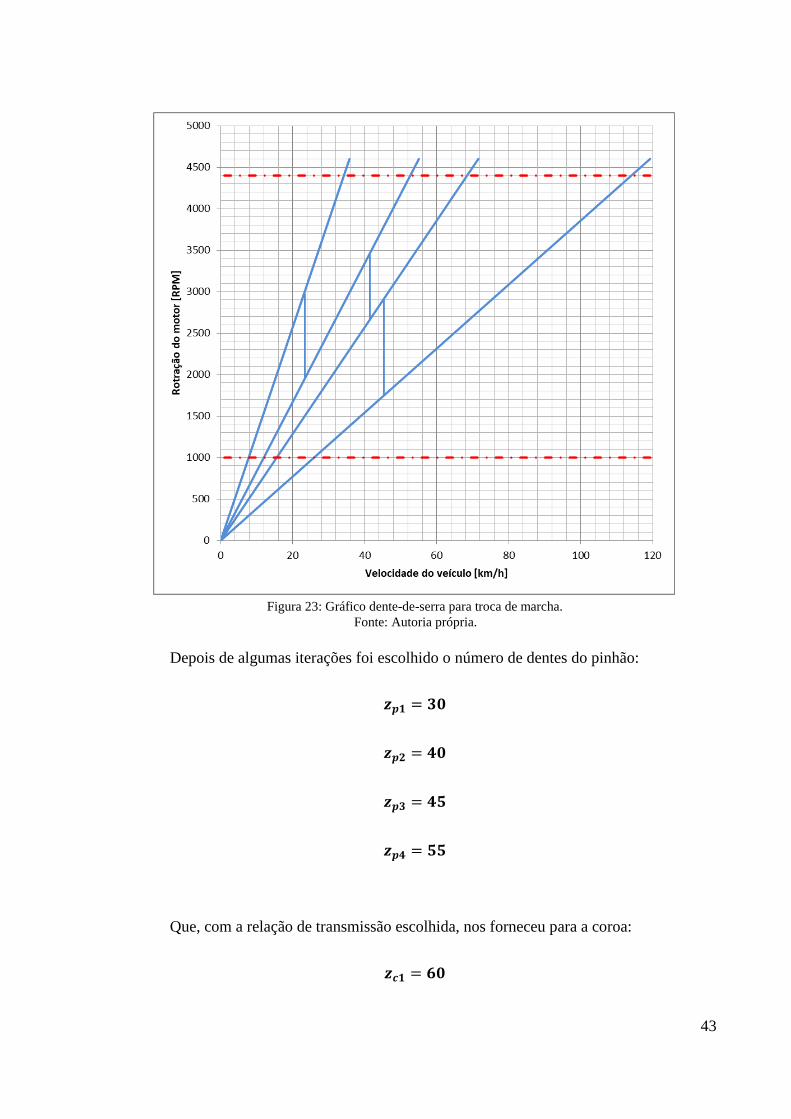
O gráfico abaixo (Figura 23), chamado de gráfico dente-de-serra, relaciona as dife-
rentes marchas (linhas partindo da origem) quando acionadas com a rotação máxima que po-
dem atingir e, por conseguinte, a velocidade máxima que o carro desenvolverá quando com o
par de engrenagens correspondente acionado. Além disso, o gráfico também nos exibe, em
qual rotação do motor a troca de marcha deverá ser feita (linhas constantes no eixo as abscis-
sas), além disso, é válido ressaltar que a área entre as linhas tracejadas é tida como a área de
torque máximo do motor operando em regime nominal.
Tabela 3: Velocidade do veículo de acordo com a marcha e
rotação de troca.
43
Depois de algumas iterações foi escolhido o número de dentes do pinhão:
𝒛𝒑𝟏 = 𝟑𝟎
𝒛𝒑𝟐 = 𝟒𝟎
𝒛𝒑𝟑 = 𝟒𝟓
𝒛𝒑𝟒 = 𝟓𝟓
Que, com a relação de transmissão escolhida, nos forneceu para a coroa:
𝒛𝒄𝟏 = 𝟔𝟎
Figura 23: Gráfico dente-de-serra para troca de marcha. Fonte: Autoria própria.

44
𝒛𝒄𝟐 = 𝟓𝟐
𝒛𝒄𝟑 = 𝟒𝟓
𝒛𝒄𝟒 = 𝟑𝟓
A velocidade de rotação do eixo maciço para esta etapa foi considerada o torque má-
ximo de saída do motor elétrico em um regime constante (𝟏𝟑 𝑵. 𝒎). Com isso, para o eixo de
saída:
𝑻𝒔𝒂í𝒅𝒂 = 𝑻𝒆𝒏𝒕𝒓𝒂𝒅𝒂. 𝒊
Como, através dos dados obtidos pela curva característica do motor, tem-se uma ro-
tação 𝒏 = 𝟒𝟒𝟎𝟎 𝑹𝑷𝑴 @ 𝟏𝟑 𝑵. 𝒎, tem-se que:
𝑻𝒔𝒂í𝒅𝒂 = 𝑻𝒆𝒏𝒕𝒓𝒂𝒅𝒂. 𝒊
O que acabou nos fornecendo a seguinte tabela:
Tabela 4: Rotação de cada marcha.
Tabela 5: Torque de saída de acordo com a
marcha selecionada.

45
Para material das engrenagens foi escolhido o Aço AISI 1020 cementado a 915ºC
por 8 horas, reaquecido a 775ºC, temperado em agua, seguido de revenimento a 175º C. Este
tratamento confere ao aço escolhido, que além de ser um aço com boa usinabilidade e preço
competitivo as seguintes características:
Tensão de ruptura: 𝑆𝑢𝑡 = 521 𝑀𝑃𝑎
Tensão de escoamento: 𝑆𝑦 = 302 𝑀𝑃𝑎
Dureza Brinnel: 𝐻𝐵 = 156
Vale ressaltar que a engrenagem possuirá acabamento retificado.
Segundo [5] largura da face de uma engrenagem deverá respeitar o seguinte interva-
lo:
9. 𝑚 < 𝐹 < 12. 𝑚
Onde m é o módulo da engrenagem e F é a largura da face da mesma. Despois de al-
gumas iterações foram escolhidos o modulo e largura da face como se encontra a seguir:
𝑚 = 2 𝑚𝑚
𝐹 = 18 𝑚𝑚
Com esses valores iniciais propostos, foi feito o dimensionamento das engrenagens
de acordo com [2] e, também, com o critério de tensão da AGMA de falha por fadiga e de
desgaste superficial.
5.4.1 Critério de tensões AGMA
Para esta análise foi determinado um fator de segurança que estivesse entre 3 e 5
conforme [2], assim:
𝐹𝑆 = 4
Inicialmente, é calculada a tensão admissível:
46
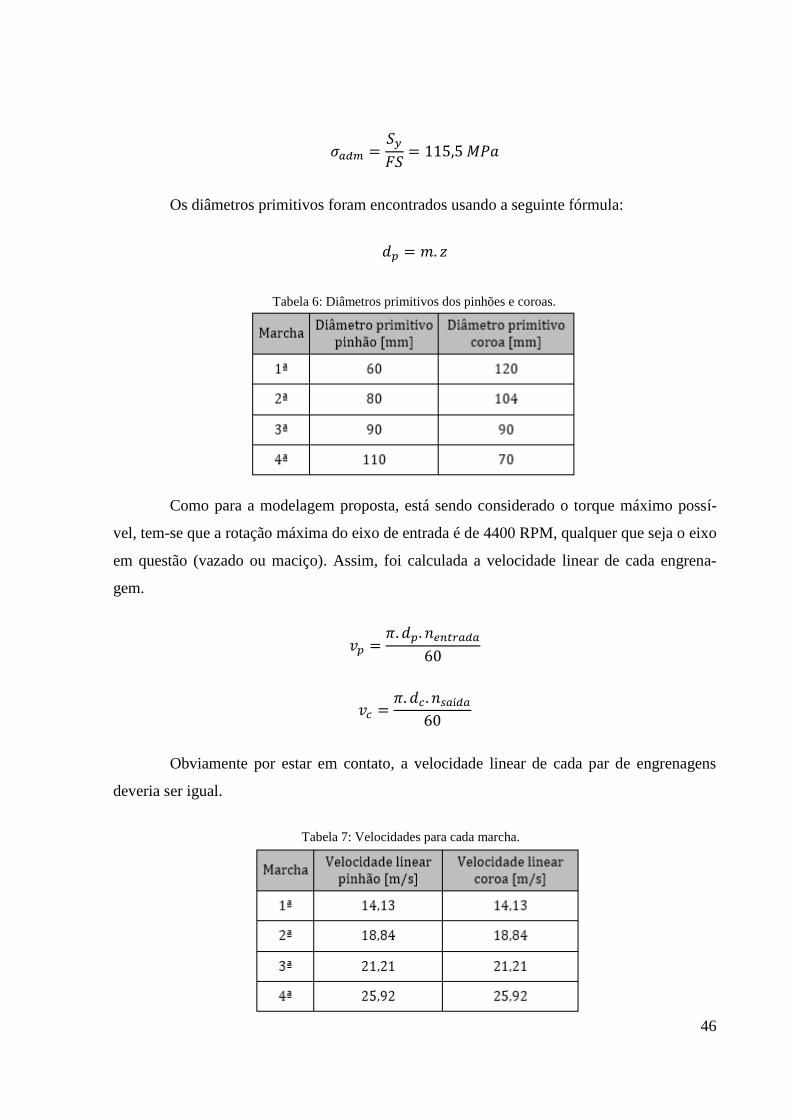
𝜎𝑎𝑑𝑚 =𝑆𝑦
𝐹𝑆= 115,5 𝑀𝑃𝑎
Os diâmetros primitivos foram encontrados usando a seguinte fórmula:
𝑑𝑝 = 𝑚. 𝑧
Como para a modelagem proposta, está sendo considerado o torque máximo possí-
vel, tem-se que a rotação máxima do eixo de entrada é de 4400 RPM, qualquer que seja o eixo
em questão (vazado ou maciço). Assim, foi calculada a velocidade linear de cada engrena-
gem.
𝑣𝑝 =𝜋. 𝑑𝑝. 𝑛𝑒𝑛𝑡𝑟𝑎𝑑𝑎
60
𝑣𝑐 =𝜋. 𝑑𝑐 . 𝑛𝑠𝑎í𝑑𝑎
60
Obviamente por estar em contato, a velocidade linear de cada par de engrenagens
deveria ser igual.
Tabela 6: Diâmetros primitivos dos pinhões e coroas.
Tabela 7: Velocidades para cada marcha.
47
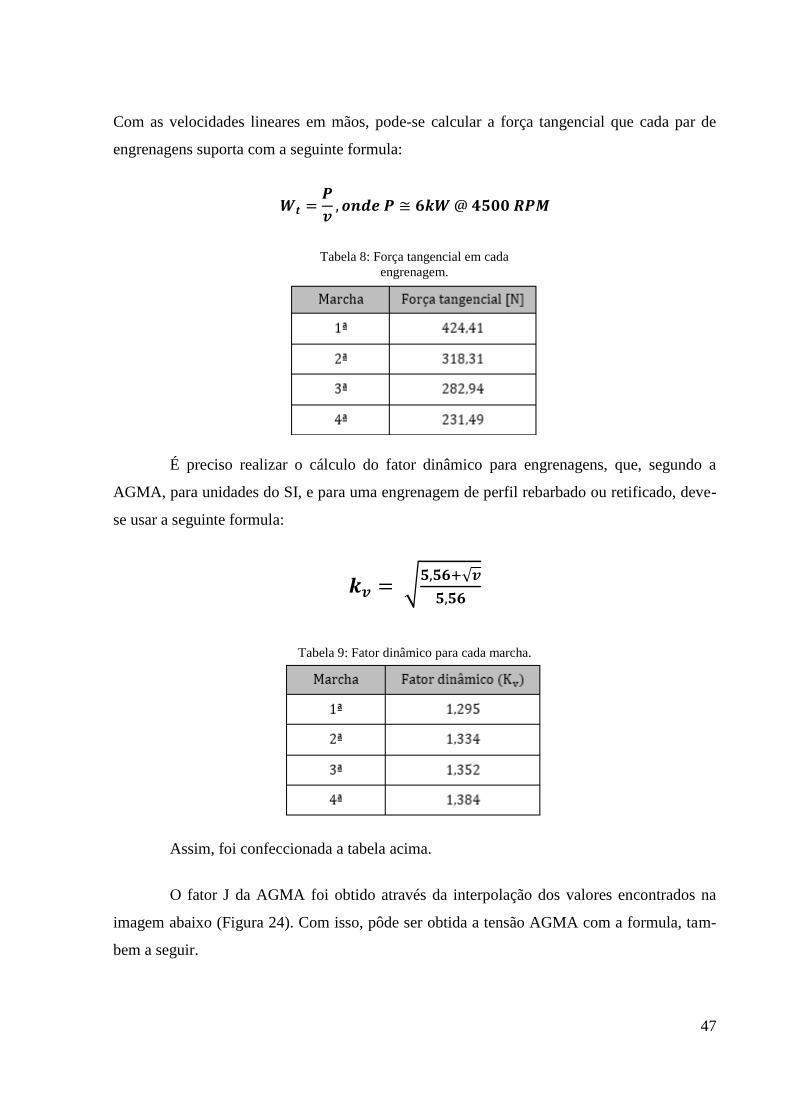
Com as velocidades lineares em mãos, pode-se calcular a força tangencial que cada par de
engrenagens suporta com a seguinte formula:
𝑾𝒕 =𝑷
𝒗, 𝒐𝒏𝒅𝒆 𝑷 ≅ 𝟔𝒌𝑾 @ 𝟒𝟓𝟎𝟎 𝑹𝑷𝑴
É preciso realizar o cálculo do fator dinâmico para engrenagens, que, segundo a
AGMA, para unidades do SI, e para uma engrenagem de perfil rebarbado ou retificado, deve-
se usar a seguinte formula:
𝒌𝒗 = √𝟓,𝟓𝟔+√𝒗
𝟓,𝟓𝟔
Assim, foi confeccionada a tabela acima.
O fator J da AGMA foi obtido através da interpolação dos valores encontrados na
imagem abaixo (Figura 24). Com isso, pôde ser obtida a tensão AGMA com a formula, tam-
bem a seguir.
Tabela 9: Fator dinâmico para cada marcha.
Tabela 8: Força tangencial em cada
engrenagem.

48
𝝈𝑨𝑮𝑴𝑨 =𝑾𝒕
𝑲𝒗.𝑭.𝒎.𝑱
O que, com os dados obtidos de passos anteriores, nos forneceu a seguinte tabela:
Em posse das tensões atuantes, foi possível o cálculo dos fatores de segurança, onde,
o menor fator de segurança de todos foi:
𝑭𝑺𝑨𝑮𝑴𝑨𝟏=
𝑺𝒚
𝝈𝑨𝑮𝑴𝑨𝟏
=𝟏𝟎𝟐𝟎
𝟐𝟐, 𝟑𝟔≅ 𝟒𝟓, 𝟔𝟐
5.4.2 Falha por flexão da engrenagem
O cálculo para o limite de resistência à fadiga dos dentes é feito através da formula a
seguir:
Tabela 10: Fator J e tensão AGMA.
Figura 24: Fator de forma da AGMA. Fonte: Notas de aula de Elementos de Máquinas II - UFRJ

49
𝝈 = 𝑾𝒕. 𝑲𝟎. 𝑲𝒗. 𝑲𝒔.𝟏
𝑭. 𝒎.𝑲𝒎. 𝑲𝑩
𝑱
Onde os índices, coeficientes e condições empregadas são:
Força tangencial (𝑾𝒕): Retirada do item anterior
Fator de sobrecarga (𝑲𝟎): Retirado da tabela abaixo (Figura 25)
𝑲𝟎 = 𝟏, 𝟑𝟓
Fator dinâmico para engrenagens (𝑲𝒗): Retirada do item anterior
Fator de tamanho (𝑲𝒔): 𝑲𝒔 = 𝟏
Módulo (𝒎)
Largura da face (𝑭)
Fator de distribuição de carga (𝑲𝒎):
𝑲𝒎 = 𝟏 + 𝑪𝒎𝒄(𝑪𝒑𝒇. 𝑪𝒑𝒎 + 𝑪𝒎𝒂 + 𝑪𝒆)
𝑪𝒎𝒄 = 𝟏 (𝑫𝒆𝒏𝒕𝒆𝒔 𝒔𝒆𝒎 𝒄𝒐𝒓𝒐𝒂𝒎𝒆𝒏𝒕𝒐)
𝑪𝒑𝒇 =𝑭
𝟏𝟎. 𝒅− 𝟎, 𝟎𝟐𝟓, (𝑭 ≤ 𝟐𝟓, 𝟒 𝒎𝒎)
𝑪𝒑𝒎 = 𝟏
𝑪𝒆 = 𝟏
𝑪𝒎𝒂 = 𝑨 + 𝑩𝑭 + 𝑪𝑭𝟐, 𝒐𝒏𝒅𝒆 𝑨; 𝑩; 𝒆 𝑪 𝒗ê𝒎 𝒅𝒂 𝒕𝒂𝒃𝒆𝒍𝒂 𝒂𝒃𝒂𝒊𝒙𝒐 (𝑭𝒊𝒈𝒖𝒓𝒂 𝟐𝟔):
Figura 25: Fator de sobrecarga. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.

50
Com todos esses dados em mãos, é feito o cálculo da tensão de flexão da engrena-
gem, a tabela com os dados obtidos segue:
A conferência do fator de segurança é feito do seguinte modo:
𝑭𝑺 =𝑺𝒕.𝒀𝑵
𝑲𝑻.𝑲𝑹.𝝈𝑭
Tabela 11: Tensão de flexão dos pinhões e das
coroas.
Figura 26: Constantes empíricas A, B e C. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.
Figura 27: Fator de ciclagem de tensão. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.

51
Onde:
Resistencia à Flexão (𝑺𝒕): 𝑺𝒕 = 𝟏𝟕𝟐, 𝟒 𝑴𝑷𝒂
Fator de ciclagem de tensão (𝒀𝑵 ) (Figura 27):
Para o caso de 𝟏𝟎𝟕 ciclos, 𝒀𝑵 ≅ 𝟏, 𝟒.
Fator de Temperatura (𝑲𝑻): 𝑲𝑻 = 𝟏, 𝒔𝒆 𝑻 ≤ 𝟏𝟐𝟏 °𝐂.
Fator de confiabilidade (𝑲𝑹): 𝑲𝑹 = 𝟏, 𝒑𝒂𝒓𝒂 𝒄𝒐𝒏𝒇𝒊𝒂𝒃𝒊𝒍𝒊𝒅𝒂𝒅𝒆 𝒅𝒆 𝟗𝟗%.
Assim, o fator de segurança para cada par de engrenagens nos forneceu:
Mais à frente, quando for feito a mesma conferencia para a falha por fadiga superfi-
cial (desgaste) será feita a comparação dos fatores de segurança para todas marchas e, assim,
poderão ser tomadas conclusões sobre qual parâmetro é o preponderante para o projeto das
engrenagens.
5.4.3 Falha por fadiga superficial
Segundo [2] o cálculo para o desgaste em engrenagens e feito da seguinte maneira:
𝛔𝐂 = 𝒁𝑬 (𝑾𝒕. 𝑲𝟎. 𝑲𝒗. 𝑲𝒔.𝑲𝑯
𝒅𝒑. 𝑭.𝟏
𝑰)
𝟏/𝟐
Tabela 12: Fatores de segurança dos pinhões e
das coroas.
52
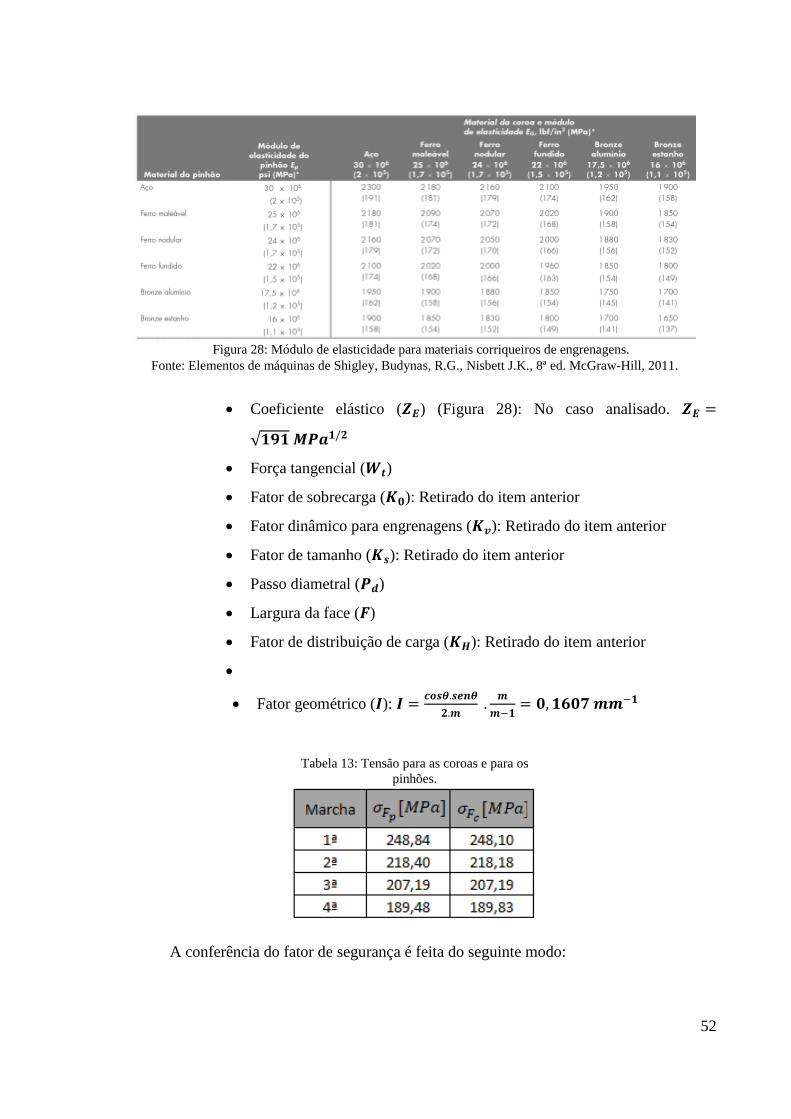
Coeficiente elástico (𝒁𝑬) (Figura 28): No caso analisado. 𝒁𝑬 =
√𝟏𝟗𝟏 𝑴𝑷𝒂𝟏/𝟐
Força tangencial (𝑾𝒕)
Fator de sobrecarga (𝑲𝟎): Retirado do item anterior
Fator dinâmico para engrenagens (𝑲𝒗): Retirado do item anterior
Fator de tamanho (𝑲𝒔): Retirado do item anterior
Passo diametral (𝑷𝒅)
Largura da face (𝑭)
Fator de distribuição de carga (𝑲𝑯): Retirado do item anterior
Fator geométrico (𝑰): 𝑰 =𝒄𝒐𝒔𝜽.𝒔𝒆𝒏𝜽
𝟐.𝒎 .
𝒎
𝒎−𝟏= 𝟎, 𝟏𝟔𝟎𝟕 𝒎𝒎−𝟏
A conferência do fator de segurança é feita do seguinte modo:
Tabela 13: Tensão para as coroas e para os
pinhões.
Figura 28: Módulo de elasticidade para materiais corriqueiros de engrenagens. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.
53
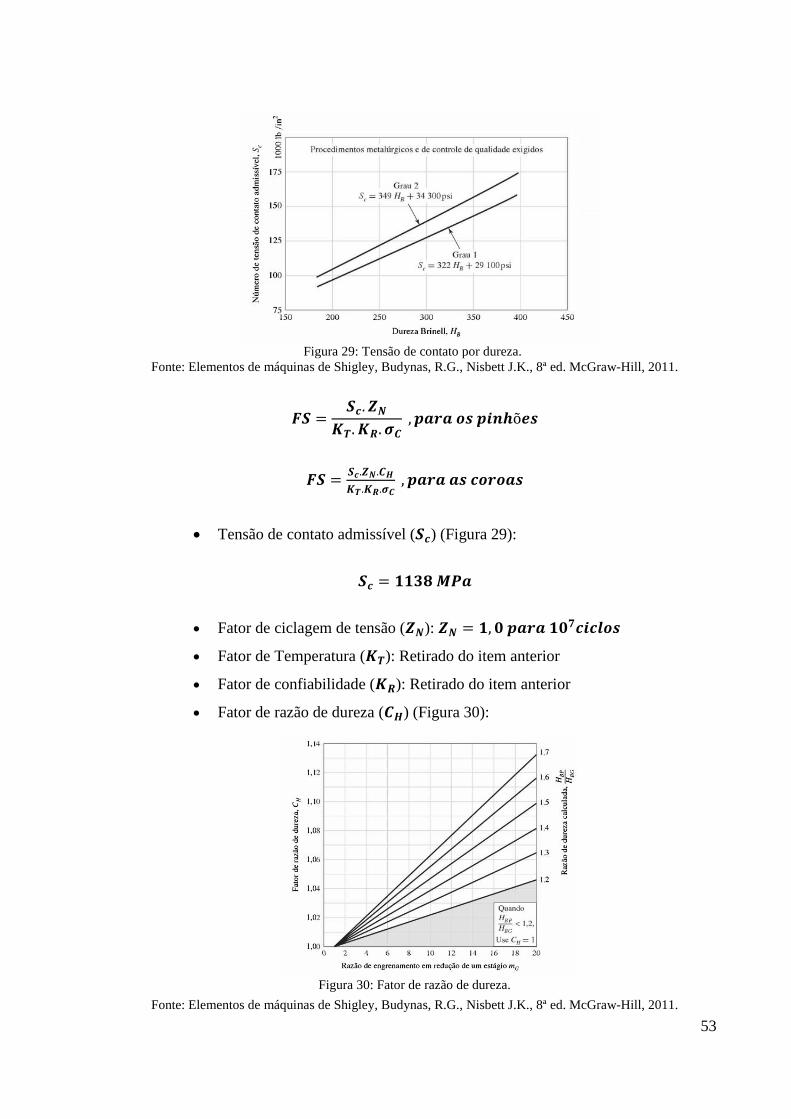
𝑭𝑺 =𝑺𝒄. 𝒁𝑵
𝑲𝑻. 𝑲𝑹. 𝝈𝑪 , 𝒑𝒂𝒓𝒂 𝒐𝒔 𝒑𝒊𝒏𝒉õ𝒆𝒔
𝑭𝑺 =𝑺𝒄.𝒁𝑵.𝑪𝑯
𝑲𝑻.𝑲𝑹.𝝈𝑪 , 𝒑𝒂𝒓𝒂 𝒂𝒔 𝒄𝒐𝒓𝒐𝒂𝒔
Tensão de contato admissível (𝑺𝒄) (Figura 29):
𝑺𝒄 = 𝟏𝟏𝟑𝟖 𝑴𝑷𝒂
Fator de ciclagem de tensão (𝒁𝑵): 𝒁𝑵 = 𝟏, 𝟎 𝒑𝒂𝒓𝒂 𝟏𝟎𝟕𝒄𝒊𝒄𝒍𝒐𝒔
Fator de Temperatura (𝑲𝑻): Retirado do item anterior
Fator de confiabilidade (𝑲𝑹): Retirado do item anterior
Fator de razão de dureza (𝑪𝑯) (Figura 30):
Figura 30: Fator de razão de dureza.
Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.
Figura 29: Tensão de contato por dureza. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.

54
𝑪𝑯 = 𝟏, 𝟎
Com os dados em mãos, puderam-se verificar os fatores de segurança para os pi-
nhões e para as coroas:
Através da análise das falhas por flexão e fadiga superficial, conclui-se que os dentes
das engrenagens projetadas são mais propensos à falha por desgaste superficial do que pela
flexão dos dentes das engrenagens, embora ambos os critérios tenham obtido nos casos anali-
sados fatores de segurança acima de 4. Caso seja necessário, uma solução para este problema
seja o emprego de algum tipo de tratamento para que ocorra o aumento da dureza superficial
da peça analisada (cementação; nitretação; entre outros).
5.5. Embreagem
O desenvolvimento da embreagem pode ser dividido em três partes: seleção dos dis-
cos de fricção; projeto dos colares de mola; e projeto das estruturas e atuadores. No entanto,
tal divisão não se observou cronologicamente, dado que como se tratou de um complexo pro-
jeto com pouca margem dimensional de folga, eles tiveram que caminhar juntos em busca de
soluções que fossem boas para todos.
5.5.1 Molas de retorno
Embora as molas de retorno do eixo maciço e do eixo vazado sejam dimensional-
mente diferentes, a maneira como foram feitos os cálculos são rigorosamente as mesmas, sen-
do diferentes apenas entradas como força de acionamento; curso; curso de pré-carga; entre
outros.
Tabela 14: Fatores de segurança
dos pinhões e das coroas.

55
A memória de cálculo empregada segue: primeiramente, por uma questão de simetria
e distribuição homogênea, foi determinado que cada colar de molas deveria contar com um
arranjo de 12 molas cada. Posterior a isso, foram empregados os valores da força de aciona-
mento do colar de mola, 𝑭𝒂𝒄 de 1550 N para o eixo maciço e de 870 N para o eixo vazado, o
que ao ser dividido pelo numero de molas por colar, nos forneceu um valor 𝑭𝒓 de aproxima-
damente 130 N para o eixo maciço e de 72,5 N para o eixo vazado, tal valor representa a força
atuante em cada mola se for pensado em uma distribuição homogênea dos esforços.
A seguir, foi estabelecida uma dissipação de energia por atrito e outras perdas na ca-
sa dos 30% para ambos os casos, chamamos essa força de 𝑭𝒂𝒕 e obteve-se os resultados de
38,75 N para o eixo maciço e de 21,25 N para o eixo vazado, sendo também possível calcu-
larmos as componentes de perda para cada mola individualmente. Chamamos essa força de
𝑭𝒂𝒕𝒓 e obteve-se 3,23 N para as molas do eixo maciço e 1,81 N para as molas do eixo vazado
Foi estipulado um curso (𝒙𝒄𝒖𝒓𝒔𝒐) de 5 mm para o caso do eixo maciço e 6 mm para o
eixo vazado. Além disso, para a pré-carga nas molas (𝒙𝒑𝒄), foi estabelecida 2,25 mm para a
mola pertencente ao eixo maciço e 4 mm para a mola do eixo vazado.
Para a força de pré-carga (𝑭𝒑𝒄), foi necessário à realização do seguinte cálculo:
𝑭𝒑𝒄 = 𝑭𝒓 . 𝒙𝒑𝒄
(𝒙𝒑𝒄 + 𝒙𝒄𝒖𝒓𝒔𝒐)
Empregando os valores obtidos até então, foram encontrados os valores de 38,8 N
para as molas do eixo maciço e 29 N para as molas do eixo vazado.
Finalizando esta primeira parte, pôde-se calcular a rigidez experimental das molas
𝑲𝒆𝒙𝒑 = 𝑭𝒓.𝑭𝒂𝒕𝒓
𝒙𝒄𝒖𝒓𝒔𝒐, onde foram obtidas as grandezas de 25,20 N para as molas do eixo maciço
e 11,78 N para as molas do eixo vazado.

56
Uma tabela resumindo as grandezas obtidas segue abaixo:
A seguir foram determinadas duas grandezas unidimensionais de cada mola, os diâ-
metros dos respectivos fios (𝒅) diâmetros das molas (𝑫) e, por consequência, a razão dos di-
âmetros de ambas (𝑪 =𝑫
𝒅).
Como a literatura [2] pede que a razão 𝑪 respeite o intervalo 𝟒 < 𝑪 < 𝟏𝟐 para qual-
quer projeto de mola helicoidal, tem-se que o projeto atente a este requisito.
O cálculo da Tensão cisalhante envolve a seguinte fórmula:
𝝉𝒎𝒂𝒙 = 𝒌𝒔.𝟖. 𝑭. 𝑫
𝝅. 𝒅𝟑 , 𝒐𝒏𝒅𝒆 𝒌𝒔 =
𝟎, 𝟓
𝑪+ 𝟏
Assim, obtiveram-se os seguintes valores para a tensão cisalhante máxima admissí-
vel:
Tabela 15: Parâmetros iniciais para os projetos das molas
Tabela 16: Parâmetros das molas (diâmetros e razão
C).

57
Como material empregado, foi usado o fio de bronze-fósforo que possui como pro-
priedades próprias os seguintes coeficientes, que foram obtidas em [2]:
𝑨 = 𝟏𝟎𝟎𝟎 𝑴𝑷𝒂. 𝒎𝒎
𝒎 = 𝟎 𝒎𝒎
Com essas constantes em mãos, foi possível o cálculo do limite de resistência à tra-
ção.
𝑺𝒖𝒕 = 𝑨
𝒅𝒎
Onde, como para o material escolhido, o coeficiente m é nulo, terá-se o mesmo limite
de resistência à tração para ambas as molas, 𝑺𝒖𝒕 = 𝟏𝟎𝟎𝟎 𝑴𝑷𝒂.
Por sua vez o limite de escoamento responde por:
𝑺𝑺𝒚 = 𝟎, 𝟓𝟕𝟕. 𝟎, 𝟕𝟓. 𝑺𝒖𝒕
Que como o limite de resistência à tração é igual para ambos os projetos das molas, o
mesmo ocorrerá para o limite de escoamento, com 𝑺𝒚 = 𝟒𝟑𝟐, 𝟕𝟓 𝑴𝑷𝒂.
O nosso coeficiente de segurança para as molas é conferido da seguinte maneira:
𝑭𝑺 = 𝝉𝒎𝒂𝒙
𝑺𝑺𝒚
Onde foi obtido 2,10 para o projeto das molas do eixo maciço e 1,48 para o projeto
das molas do eixo vazado.
O próximo passo foram os cálculos para encontrar o número de espiras ativas de ca-
da mola, onde N equivale a quantidade de espiras ativas.

58
𝑵 = 𝒅𝟒. 𝑮
𝟖. 𝑫𝟑. 𝑲
Inserindo o valor referente de cada coeficiente encontrado nos itens anteriores e utili-
zando 𝑮 ≅ 𝟒𝟒 𝑮𝑷𝒂, encontramos 𝑵 = 𝟑 para as molas do eixo maciço e 𝑵 = 𝟐 para as mo-
las do eixo vazado.
Foi feita uma conferência para se descobrir o coeficiente elástico efetivo de cada mo-
la com os valores obtidos acima.
𝑲𝒆𝒇 = 𝒅𝟒. 𝑮
𝟖. 𝑫𝟑. 𝑵
Onde foram obtidos os seguintes valores retificados: 27,06 N/mm para o projeto das
molas para o eixo maciço e 7,64 N/mm para o projeto das molas do eixo vazado.
Foi feita, também, a conferência do curso efetivo de cada mola, onde foi usada a se-
guinte formula:
𝒙𝒆𝒇 = 𝑭𝒓 − 𝑭𝒂𝒕𝒓
𝑲𝒆𝒇
Onde foram obtidos 4,65 mm para o projeto das molas do eixo maciço e 9,25 mm pa-
ra o projeto das molas do eixo vazado.
Figura 31: Relações matemáticas para extremidades de molas. Fonte: Elementos de máquinas de Shigley, Budynas, R.G., Nisbett J.K., 8ª ed. McGraw-Hill, 2011.
59
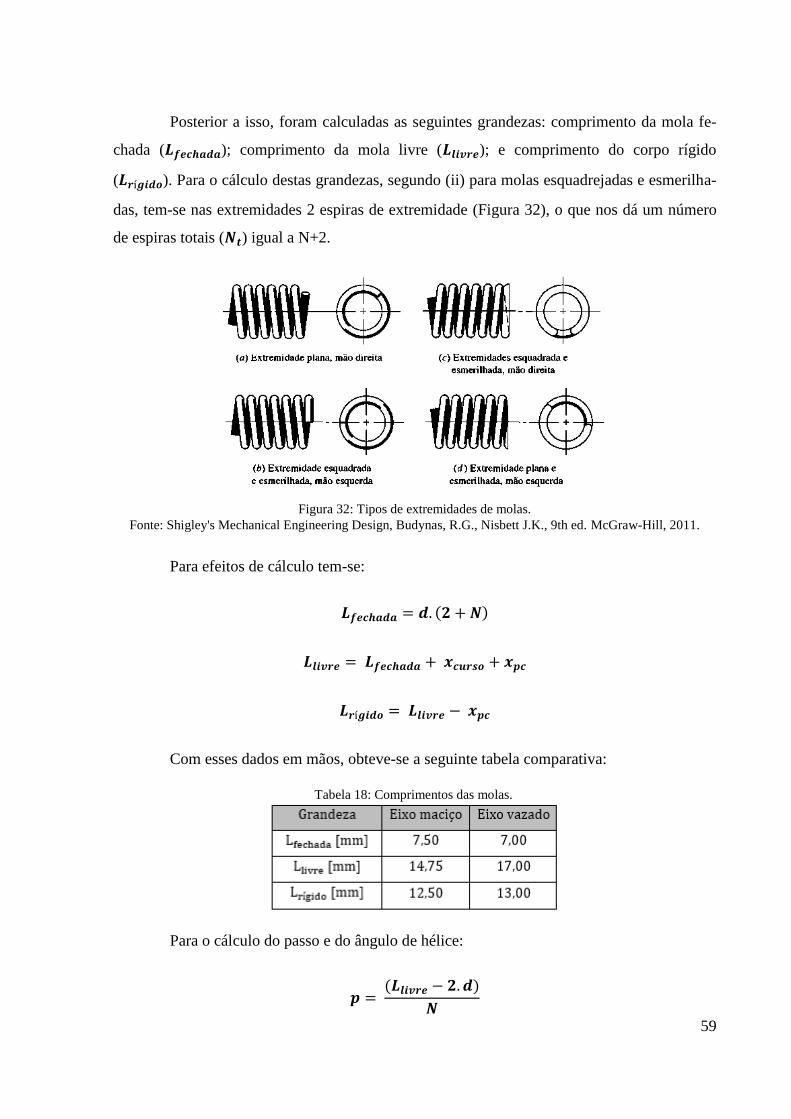
Posterior a isso, foram calculadas as seguintes grandezas: comprimento da mola fe-
chada (𝑳𝒇𝒆𝒄𝒉𝒂𝒅𝒂); comprimento da mola livre (𝑳𝒍𝒊𝒗𝒓𝒆); e comprimento do corpo rígido
(𝑳𝒓í𝒈𝒊𝒅𝒐). Para o cálculo destas grandezas, segundo (ii) para molas esquadrejadas e esmerilha-
das, tem-se nas extremidades 2 espiras de extremidade (Figura 32), o que nos dá um número
de espiras totais (𝑵𝒕) igual a N+2.
Para efeitos de cálculo tem-se:
𝑳𝒇𝒆𝒄𝒉𝒂𝒅𝒂 = 𝒅. (𝟐 + 𝑵)
𝑳𝒍𝒊𝒗𝒓𝒆 = 𝑳𝒇𝒆𝒄𝒉𝒂𝒅𝒂 + 𝒙𝒄𝒖𝒓𝒔𝒐 + 𝒙𝒑𝒄
𝑳𝒓í𝒈𝒊𝒅𝒐 = 𝑳𝒍𝒊𝒗𝒓𝒆 − 𝒙𝒑𝒄
Com esses dados em mãos, obteve-se a seguinte tabela comparativa:
Para o cálculo do passo e do ângulo de hélice:
𝒑 = (𝑳𝒍𝒊𝒗𝒓𝒆 − 𝟐. 𝒅)
𝑵
Tabela 18: Comprimentos das molas.
Figura 32: Tipos de extremidades de molas. Fonte: Shigley's Mechanical Engineering Design, Budynas, R.G., Nisbett J.K., 9th ed. McGraw-Hill, 2011.
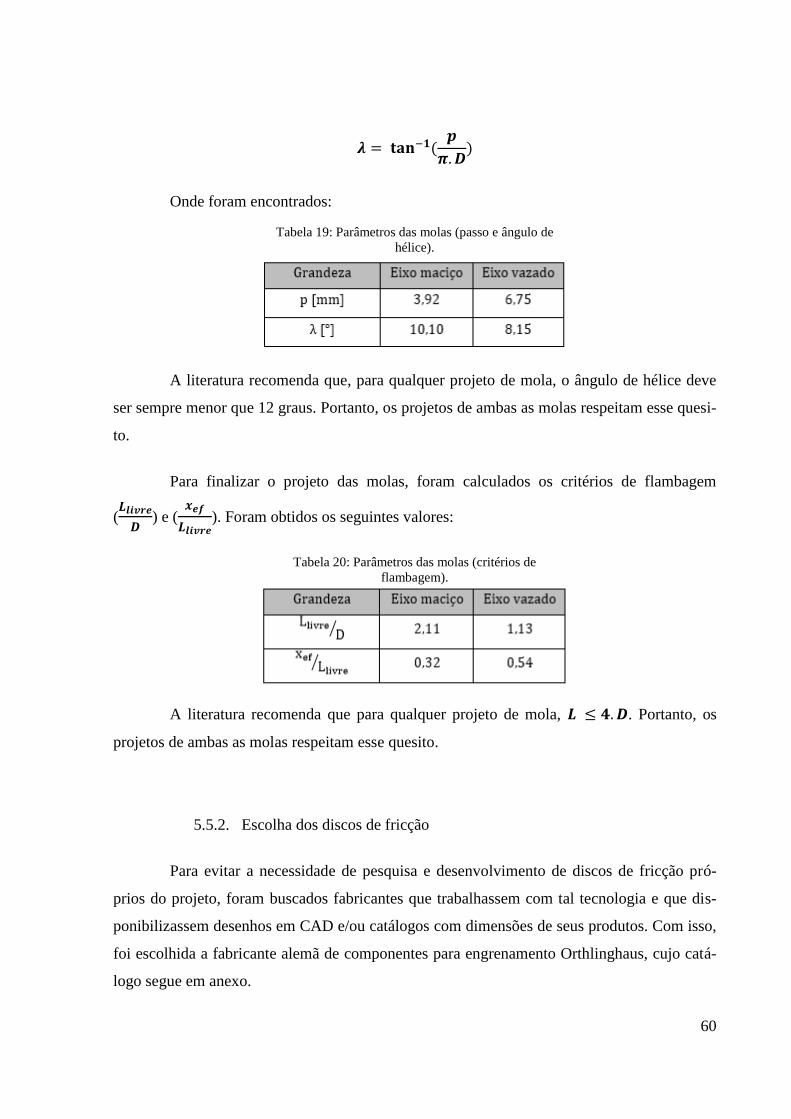
60
𝝀 = 𝐭𝐚𝐧−𝟏(𝒑
𝝅. 𝑫)
Onde foram encontrados:
A literatura recomenda que, para qualquer projeto de mola, o ângulo de hélice deve
ser sempre menor que 12 graus. Portanto, os projetos de ambas as molas respeitam esse quesi-
to.
Para finalizar o projeto das molas, foram calculados os critérios de flambagem
(𝑳𝒍𝒊𝒗𝒓𝒆
𝑫) e (
𝒙𝒆𝒇
𝑳𝒍𝒊𝒗𝒓𝒆). Foram obtidos os seguintes valores:
A literatura recomenda que para qualquer projeto de mola, 𝑳 ≤ 𝟒. 𝑫. Portanto, os
projetos de ambas as molas respeitam esse quesito.
5.5.2. Escolha dos discos de fricção
Para evitar a necessidade de pesquisa e desenvolvimento de discos de fricção pró-
prios do projeto, foram buscados fabricantes que trabalhassem com tal tecnologia e que dis-
ponibilizassem desenhos em CAD e/ou catálogos com dimensões de seus produtos. Com isso,
foi escolhida a fabricante alemã de componentes para engrenamento Orthlinghaus, cujo catá-
logo segue em anexo.
Tabela 19: Parâmetros das molas (passo e ângulo de
hélice).
Tabela 20: Parâmetros das molas (critérios de
flambagem).

61
Para a memória de cálculo, primeiramente foi escolhido um número fixo de pares de
discos que atendessem uma margem aceitável de diâmetros internos e externos. Com isso, os
eleitos foram: 3021-744-55-000000 (dentes internos; módulo 3 mm; e 60 dentes) e 3021-637-
55-029000 (dentes externos; módulo 5 mm; e 45 dentes) para o eixo maciço e 3021-744-32-
000000 (dentes internos; módulo 2 mm; e 51 dentes) e 3100-640-39-0..000 (dentes externos;
módulo 4 mm; e 36 dentes) para o eixo vazado. Após, foram utilizadas as dimensões disponi-
bilizadas no catálogo para que fosse descoberta a área de contato efetiva entre os discos. Esta
área foi de 3477 mm² para o projeto do eixo vazado e de 8585 mm² para o projeto do eixo
maciço.
De acordo com [6] o fator de atrito entre materiais cerâmicos aplicados em pastilhas
de freio e discos de fricção quando em contatos com superfícies metálicas (e.g. discos e freio
e/ou discos de aço) converge para um range que oscila entre 0,36 e 0,41. Portanto, para fins de
cálculo, foi empregado um fator de atrito intermediário de 0,38.
A bomba empregada para o acionamento do atuador e, por fim, dos discos, foi uma
bomba comercial da marca FTE Automotive modelo EP100 que pode nos fornecer uma faixa
de pressão que vai desde 0,1 MPa @ 13 l/min até 0,3 MPa @ 8 l/min operando com uma vol-
tagem de 9 até 16 volts cujo catálogo se encontra em anexo. Para os cálculos, foi escolhida
uma pressão intermediária de 0,2 MPa.
O cálculo da força de atrito existente entre os conjuntos de discos foi feito respeitan-
do a seguinte formula:
𝑭𝒂𝒕 = 𝝁. 𝑨𝒄𝒐𝒏𝒕. 𝑷. 𝑵
Onde 𝑷 é a pressão de operação da bomba; 𝑵é o numero de conjunto de discos de
fricção; 𝝁 é o coeficiente de atrito entre as superfícies; 𝑨𝒄𝒐𝒏𝒕 é a área de contato entre os dis-
cos. Para tal conta, foi encontrado um 𝑭𝒂𝒕 de 652,49 N para o eixo maciço e de 528,49 N para
o eixo vazado.
Foi estipulada uma distância média (�̅�) como sendo a media dos diâmetros dos dis-
cos que possuem o lado interior estriado. Ou seja, para o eixo maciço, �̅� = 𝟓𝟖, 𝟐𝟓 𝒎𝒎 e
�̅� = 𝟗𝟗, 𝟑𝟖 𝒎𝒎 para o eixo vazado.

62
Para calcular o torque máximo no qual a configuração proposta poderá trabalhar sem
que haja escorregamento, foram utilizadas as aproximações �̅� de cada projeto, além da força
de atrito calculada, além de dois pares de discos já previamente escolhidos para o eixo vazado
e apenas um par para o eixo maciço.
𝑻 = 𝑭𝒂𝒕. �̅�
Assim, teve-se que o torque máximo para o eixo vazado foi de aproximadamente
30,78 N.m e para o eixo maciço foi de aproximadamente 64,84 N.m. Como os torques máxi-
mos admissíveis a serem transmitidos foram superiores ao torque máximo “entregue” pelo
motor do protótipo não supera os 13 N.m, tem-se que o arranjo proposto suporta qualquer
torque que possa vir a ser imposto pela unidade motriz.
5.5.3 Estruturas internas
Segundo [7], para construção de superfícies sujeitas a pressões internas, o seguinte
cálculo deve ser efetuado para determinação da espessura mínima de parede:
𝒕 =𝑷. 𝑫𝒊
𝟐. 𝑺𝒖𝒕 − 𝟎, 𝟔. 𝑷
Onde 𝑷 é a pressão a qual as superfícies internas estão sujeitas; e 𝑫𝒊 é o diâmetro in-
terno. Para o caso do cálculo da espessura mínima de parede necessária, foi empregada uma
condição de contorno que representa o menor diâmetro interno previsto no esboço do dese-
nho, ou seja, vou empregado um 𝑫𝒊 equivalente a aproximadamente 71 mm. Além disso, vale
ressaltar que o material empregado foi o aço AISI 1020 por seu baixo preço e boa usinabili-
dade, ele conta com um Limite de Resistencia à Tração de aproximadamente 420 MPa.
Com todas essas premissas, foi finalmente calculada a espessura mínima que as es-
truturas internas poderiam possuir, e, utilizando um fator de segurança de 4, obteve-se o resul-
tado mínimo de 0,06 mm de parede.
63
5.6. Elementos de transmissão de torque
Para o projeto da chaveta que realiza a fixação dos eixos com os respectivos hubs e
transmitirão a potencia vinda do motor para o eixo de saída depois do engrenamento da mar-
cha mais indicada. É importante ressaltar que chavetas são elementos padronizados e que o
cálculo de dimensionamento e seleção seguiu as normas padrão da ABNT-NBR 6375, con-
forme indicado na figura 33.
O local a ser fixado com chaveta possui um diâmetro (𝒅) de 20 mm, contemplado na
norma. Com isso, o sistema de seleção e dimensionamento será facilitado, vez não será neces-
sário o emprego de chavetas diferentes. Baseado nisso, foi feita a seguinte escolha:
Largura de chaveta (𝑏): 6 mm
Altura de chaveta (ℎ): 6 mm
Profundidade da chaveta no eixo (𝑡): 3,5 mm
Comprimento do rasgo de chaveta (𝐿): 20 mm
O material escolhido para a chaveta foi o aço AISI 1020 estirado a frio que possui os
seguintes parâmetros mecânicos: 𝑆𝑢𝑡 = 420 𝑀𝑃𝑎; 𝑆𝑦 = 350 𝑀𝑃𝑎.
Para o cálculo dos esforços na chaveta, foi considerado o torque máximo do motor
(i.e. 13 N.m), mesmo sabendo que dificilmente haverá alguma situação onde ele seja atingido,
ele foi levado em conta como uma contingência de projeto.
Para as tensões cisalhante, de compressão e máxima, foram utilizadas as seguintes
formulas:
𝜏𝑐𝑖𝑠 =2. 𝑇
𝑑. 𝑏. 𝐿
𝜏𝑐𝑜𝑚𝑝 =4. 𝑇
𝑑. 𝑡. 𝐿
𝜏𝑚𝑎𝑥 = √𝜏𝑐𝑖𝑠2 + 𝜏𝑐𝑜𝑚𝑝
2
Com isso, foram encontrados os seguintes valores:

64
𝜏𝑐𝑖𝑠 = 10,83 𝑀𝑃𝑎
𝜏𝑐𝑜𝑚𝑝 = 21,67 𝑀𝑃𝑎
𝜏𝑚𝑎𝑥 = 28,66 𝑀𝑃𝑎
Com isso, puderam ser efetuados os cálculos dos fatores de segurança envolvidos. Os
mesmos foram feitos do seguinte modo:
𝐹𝑆𝑐𝑖𝑠 = 𝜏𝑐𝑖𝑠
𝑆𝑦≡ 16,15
𝐹𝑆𝑐𝑜𝑚𝑝 = 𝜏𝑐𝑜𝑚𝑝
𝑆𝑦≡ 24,23
𝐹𝑆𝑔𝑙𝑜𝑏𝑎𝑙 = 𝜏𝑚𝑎𝑥
𝑆𝑦≡ 12,21
Por sua vez, para o projeto das estrias, presente no eixo vazado e no eixo de saída nas
posições dos sincronizadores foi utilizado a norma alemã DIN 5480, sendo que para o eixo
vazado, foi empregado um conjunto de estrias de módulo 2 mm; diâmetro base (𝑑𝑏) igual a 55
mm; e um comprimento de 13 mm.
Como as estruturas de transmissão de torque constituintes da embreagem possuem
suas dimensões limitadas apenas pela configuração escolhida pelos discos de fricção, tem-se
que seus diâmetros base e módulos são os mesmos dos discos de fricção correspondentes.

65
5.7. Rolamentos e rentetores
A seleção dos rolamentos para os eixos pôde ser feita empregando os diagramas de
esforços utilizados no dimensionamento dos eixos. Como modo de recordar as forças atuan-
tes, tem-se:
𝑭𝒓𝒎𝒂𝒄𝒊ç𝒐= 𝟒𝟑𝟑, 𝟑𝟑 𝑵
𝑭𝒂𝒎𝒂𝒄𝒊ç𝒐= 𝟎 𝑵
Para encontrar-se a capacidade dinâmica necessária em função de horas de operação,
deve-se fazer a seguinte formulação:
𝑪 = 𝑭𝑫(𝑳𝒅𝒏𝑫. 𝟔𝟎
𝑳𝟏𝟎𝒉. 𝟔𝟎)𝟏/𝒂
Figura 33: Parâmetros normatizados para chavetas. Fonte: Norma ABNT-NBR 6375

66
Onde a vale 3 para rolamentos de esferas e 𝟏𝟎
𝟑 para mancais de rolos; 𝑳𝒅 é a vida de-
sejada em horas; 𝒏𝒅 a rotação desejada em rpm; 𝑭𝑫é a carga radial desejada.
Com isso, para o eixo maciço, para que o rolamento tenha uma vida nominal de 𝟏𝟎𝟔
horas; em uma velocidade de rotação de 4500 rpm; e uma vida de 5000 h, deve-se escolher,
para um rolamento de esferas, um rolamento que possua capacidade dinâmica igual a:
𝑪 = 𝟒𝟕𝟖𝟗, 𝟐𝟎 𝑵
E para um rolamento de rolos cônicos:
𝑪 = 𝟑𝟕𝟔𝟔, 𝟑𝟑 𝑵
Como para o eixo maciço, por questões dimensionais, foram selecionados os rola-
mentos 7904A5 (rolamento de esferas), com carga máxima dinâmica de 10700 N, além do
rolamento HR 32004XJ (rolamento de rolos cônicos), com carga máxima dinâmica de 27400
N, pode ser dito que os rolamentos atendem aos critérios estabelecidos.
Por sua vez, para o eixo vazado, tem-se o seguinte panorama:
𝑭𝒓𝒗𝒂𝒛𝒂𝒅𝒐= 𝟑𝟐𝟓, 𝟎𝟎 𝑵
𝑭𝒂𝒗𝒂𝒛𝒂𝒅𝒐= 𝟎 𝑵
Assim, para que o eixo vazado cumpra o mesmo que se espera do eixo maciço no
que tange às horas de uso e rotação, será preciso um rolamento de esferas que possua capaci-
dade dinâmica igual a:
𝑪 = 𝟑𝟓𝟗𝟏, 𝟗𝟑 𝑵
E para um rolamento de rolos cilíndricos:
𝑪 = 𝟐𝟖𝟐𝟒, 𝟕𝟕 𝑵
Assim como no caso do eixo maciço, a escolha dos rolamentos foi feita primeira-
mente por questões dimensionais. Deste modo, foi selecionado o rolamento HR 32004XJ (ro-
67
lamento de rolos cônicos), cuja carga dinâmica máxima é de 27400 N. Portanto, os rolamen-
tos selecionados atendem ao critério proposto.
Como já foi visto no momento do dimensionamento do diâmetro mínimo, o projeto
do eixo de saída e do eixo ímpar é basicamente o idêntico, por se tratarem de dois eixos maci-
ços. Deste modo, os parâmetros para o cálculo da vida dos rolamentos foram:
𝑭𝒓𝒔𝒂í𝒅𝒂= 𝟑𝟕𝟏, 𝟒𝟑𝑵
𝑭𝒂𝒔𝒂í𝒅𝒂= 𝟎 𝑵
O que, respeitando os critérios estabelecidos para os outros eixos, retorna os seguin-
tes parâmetros de saída:
Para rolamentos de esferas:
𝑪 = 𝟒𝟏𝟎𝟓, 𝟎𝟖 𝑵
E para rolamentos de rolos cilíndricos:
𝑪 = 𝟑𝟐𝟐𝟖, 𝟑𝟐 𝑵
O rolamento escolhido para este propósito foi o 6305, cuja sua folha de dados reco-
menda uma carga máxima dinâmica de até 20600 N. Ou seja, atende perfeitamente o propósi-
to do projeto.
Por sua vez, para o cálculo da carga dinâmica máxima dos rolamentos de agulha para
o movimento do adaptador solidário ao eixo vazado, tem-se o seguinte quadro:
𝑭𝒓𝒂𝒅𝒂𝒑𝒕𝒂𝒅𝒐𝒓= 𝟐𝟑𝟖 𝑵
𝑭𝒂𝒂𝒅𝒂𝒑𝒕𝒂𝒅𝒐𝒓= 𝟎 𝑵
Assim, para que possamos imputar os mesmos indicadores de horas de vida e rotação
utilizadas em ambos os eixos, no adaptador, precisamos selecionar um rolamento de agulhas
que possua a seguinte carga dinâmica:

68
𝑪 = 𝟐𝟗𝟐𝟐 𝑵
Para tal tarefa, foi empregado o rolamento FWF 505530, um rolamento de agulha cu-
ja carga máxima dinâmica é de 39500 N. Ou seja, com este último estudo, conclui-se que to-
dos os rolamentos empregados atentem aos requisitos de projeto.
Para os rolamentos internos às engrenagens do eixo de saída, assim como na seleção
de rolamentos para o adaptador, foi dada predileção aos rolamentos de agulha, devido ao fato
de durante o projeto ter sido observado que o espaço existente não nos permitiria o uso de
outro tipo de rolamento com diâmetro externo grande, além de que os rolamentos de agulha
são conhecidos por possuírem elevada capacidade dinâmica de carga radial.
Assim, para o rolamento da primeira marcha:
𝑭𝒓𝟏= 𝟐𝟏𝟔, 𝟔𝟕 𝑵
𝑭𝒂𝟏= 𝟎 𝑵
𝑪𝟏 = 𝟏𝟖𝟖𝟑, 𝟐𝟏 𝑵
Para a segunda:
𝑭𝒓𝟐= 𝟐𝟔𝟎, 𝟎𝟎 𝑵
𝑭𝒂𝟐= 𝟎 𝑵
𝑪𝟐 = 𝟐𝟐𝟓𝟗, 𝟖𝟐 𝑵
Para a terceira:
𝑭𝒓𝟑= 𝟐𝟖𝟖, 𝟖𝟖 𝑵
𝑭𝒂𝟑= 𝟎 𝑵
𝑪𝟑 = 𝟐𝟓𝟏𝟎, 𝟖𝟑 𝑵

69
Para a quarta:
𝑭𝒓𝟒= 𝟑𝟕𝟏, 𝟒𝟑 𝑵
𝑭𝒂𝟒= 𝟎 𝑵
𝑪𝟒 = 𝟑𝟐𝟐𝟖, 𝟑𝟐 𝑵
Por uma questão de padronização, para as engrenagens referentes às primeira e se-
gunda marchas, tiveram como rolamento escolhido, o FWF 303520 cuja carga dinâmica má-
xima é de aproximadamente 21000 N, ratificando a escolha correta para estes casos.
Por sua vez, para as engrenagens referentes às terceira e quarta marchas, por uma
questão dimensional, foi escolhido o rolamento FWF 354013 cuja carga dinâmica máxima é
de 24600 N.
Por sua vez, a escolha dos retentores foi um pouco mais complexa devido as diferen-
tes funções que se mostraram necessárias nos retentores, além, obviamente, a de promover
uma estanqueidade entre compartimentos adjacentes. Apenas como um ilustrativo, os retento-
res comuns às hastes de comando dos anéis sincronizadores e a carcaça superior, precisam,
além de ter propriedades de vedação, permitir o movimento axial da haste com relação à car-
caça.
Devido às características do meio o qual os retentores estarão expostos durante a
maior parte da operação (30-70 ºC), segundo [8] os seguintes materiais são recomendáveis
para os retentores a serem escolhidos podem ser desde a borracha nitrílica (NBR), até materi-
ais mais sofisticados com um range térmico de trabalho maior como o Acrilo-nitrilo butadie-
no hidrogenado (HNBR) e o Politetrafluoretileno (PTFE), comumente chamado de teflon.
Para os retentores que precisavam permitir o movimento axial entre a carcaça e o ei-
xo, foram escolhidos os seguintes modelos da marca Trelleborg: RU9101000-Z20;
RU9000500-Z20; RVA4N1900-Z80E; RU9001050-Z20; e RVA1N0140. Cujas fichas técni-
cas estão anexadas. Vale ressaltar que a escolha dentro da gama de retentores axiais se deu
pela verificação dimensional dos mesmos bem como a velocidade crítica de rotação.
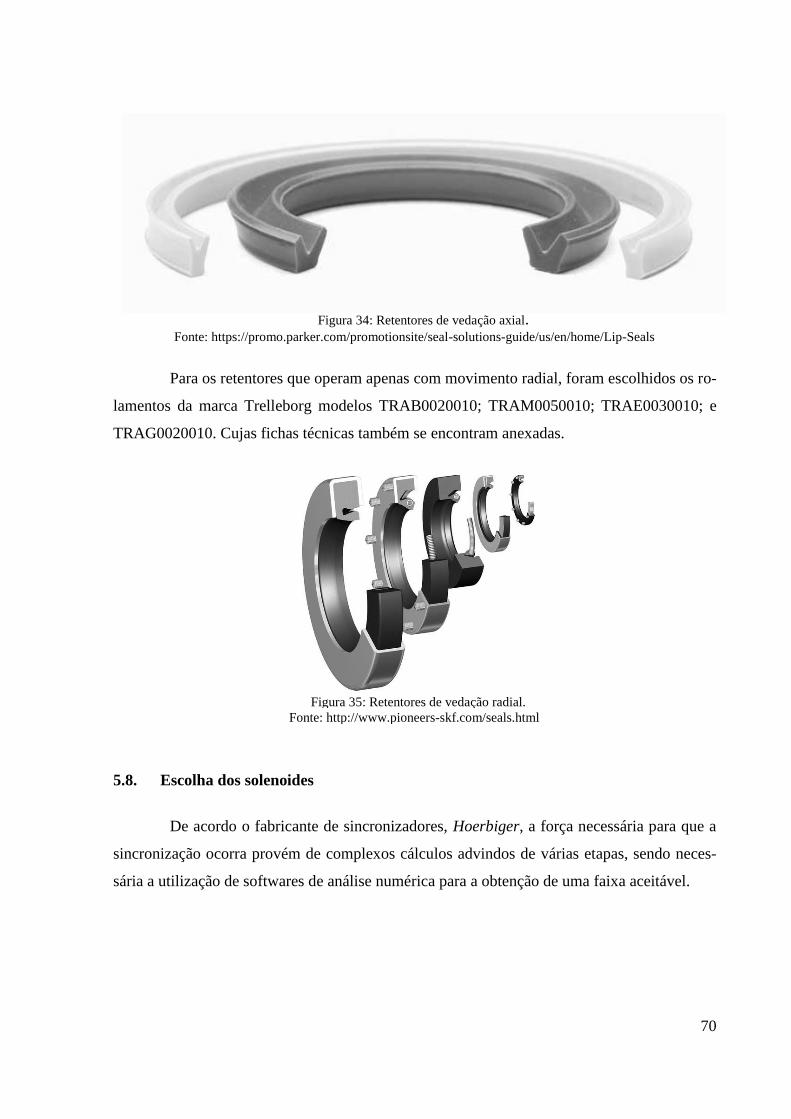
70
Para os retentores que operam apenas com movimento radial, foram escolhidos os ro-
lamentos da marca Trelleborg modelos TRAB0020010; TRAM0050010; TRAE0030010; e
TRAG0020010. Cujas fichas técnicas também se encontram anexadas.
5.8. Escolha dos solenoides
De acordo o fabricante de sincronizadores, Hoerbiger, a força necessária para que a
sincronização ocorra provém de complexos cálculos advindos de várias etapas, sendo neces-
sária a utilização de softwares de análise numérica para a obtenção de uma faixa aceitável.
Figura 35: Retentores de vedação radial. Fonte: http://www.pioneers-skf.com/seals.html
Figura 34: Retentores de vedação axial. Fonte: https://promo.parker.com/promotionsite/seal-solutions-guide/us/en/home/Lip-Seals
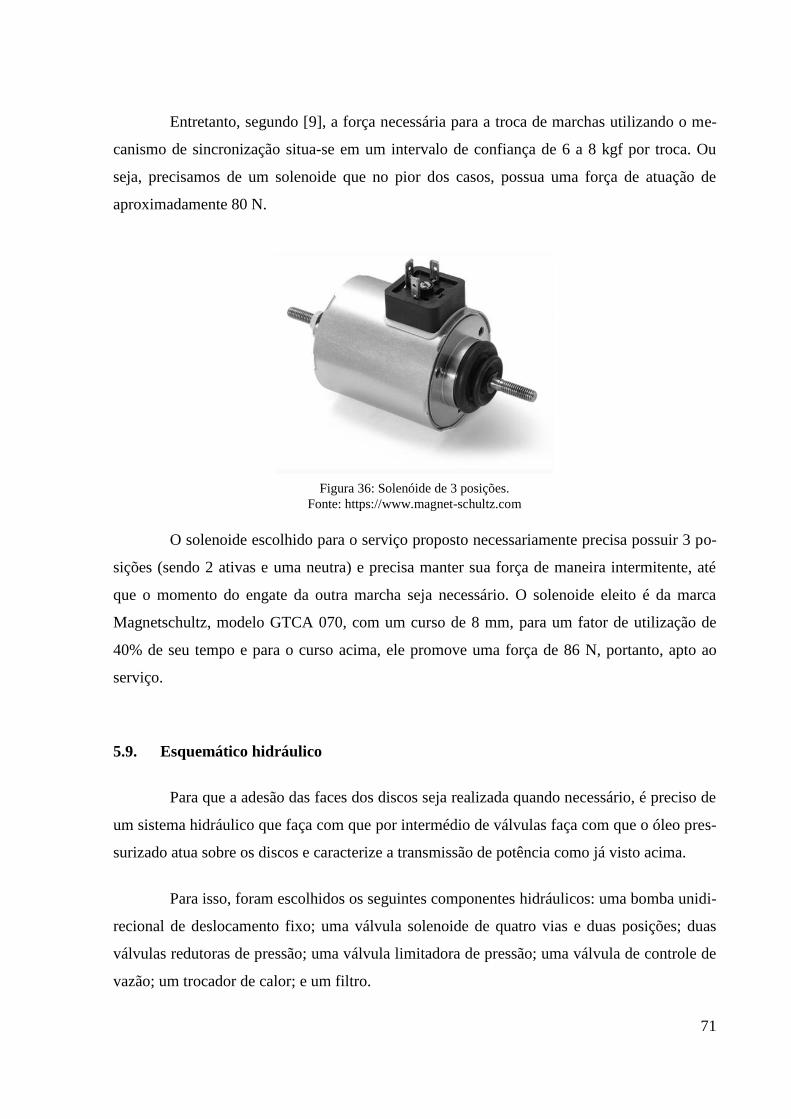
71
Entretanto, segundo [9], a força necessária para a troca de marchas utilizando o me-
canismo de sincronização situa-se em um intervalo de confiança de 6 a 8 kgf por troca. Ou
seja, precisamos de um solenoide que no pior dos casos, possua uma força de atuação de
aproximadamente 80 N.
O solenoide escolhido para o serviço proposto necessariamente precisa possuir 3 po-
sições (sendo 2 ativas e uma neutra) e precisa manter sua força de maneira intermitente, até
que o momento do engate da outra marcha seja necessário. O solenoide eleito é da marca
Magnetschultz, modelo GTCA 070, com um curso de 8 mm, para um fator de utilização de
40% de seu tempo e para o curso acima, ele promove uma força de 86 N, portanto, apto ao
serviço.
5.9. Esquemático hidráulico
Para que a adesão das faces dos discos seja realizada quando necessário, é preciso de
um sistema hidráulico que faça com que por intermédio de válvulas faça com que o óleo pres-
surizado atua sobre os discos e caracterize a transmissão de potência como já visto acima.
Para isso, foram escolhidos os seguintes componentes hidráulicos: uma bomba unidi-
recional de deslocamento fixo; uma válvula solenoide de quatro vias e duas posições; duas
válvulas redutoras de pressão; uma válvula limitadora de pressão; uma válvula de controle de
vazão; um trocador de calor; e um filtro.
Figura 36: Solenóide de 3 posições. Fonte: https://www.magnet-schultz.com
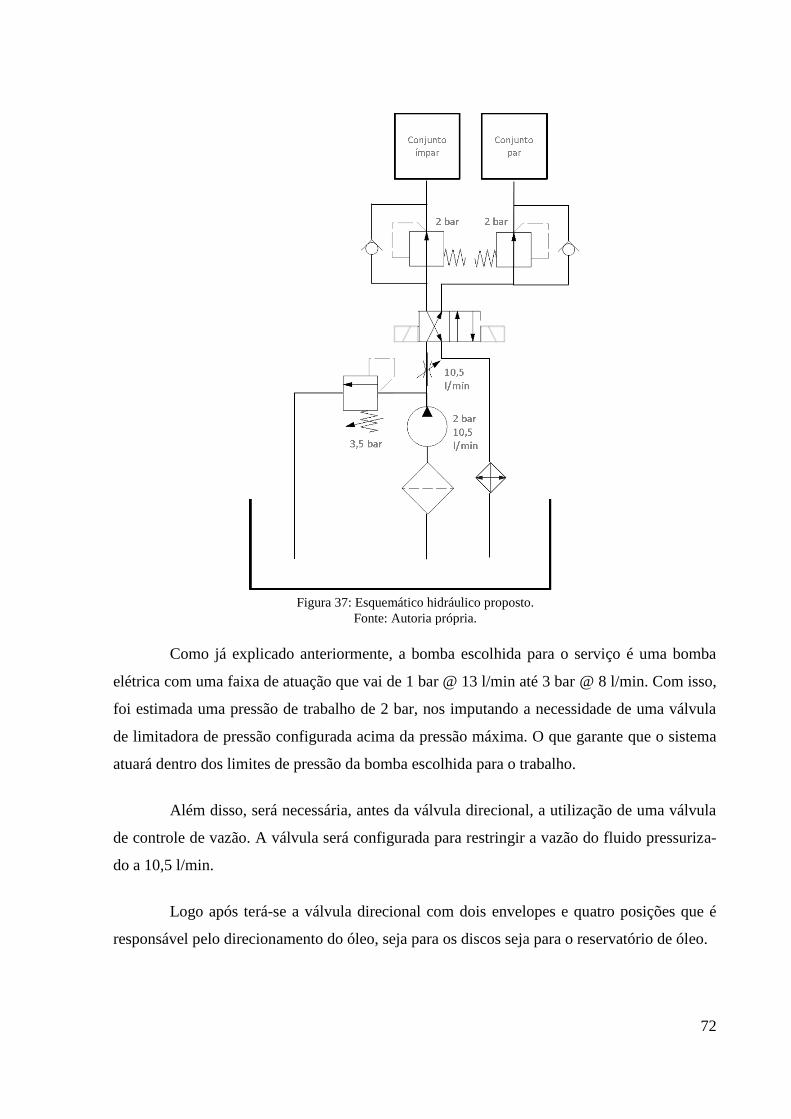
72
Como já explicado anteriormente, a bomba escolhida para o serviço é uma bomba
elétrica com uma faixa de atuação que vai de 1 bar @ 13 l/min até 3 bar @ 8 l/min. Com isso,
foi estimada uma pressão de trabalho de 2 bar, nos imputando a necessidade de uma válvula
de limitadora de pressão configurada acima da pressão máxima. O que garante que o sistema
atuará dentro dos limites de pressão da bomba escolhida para o trabalho.
Além disso, será necessária, antes da válvula direcional, a utilização de uma válvula
de controle de vazão. A válvula será configurada para restringir a vazão do fluido pressuriza-
do a 10,5 l/min.
Logo após terá-se a válvula direcional com dois envelopes e quatro posições que é
responsável pelo direcionamento do óleo, seja para os discos seja para o reservatório de óleo.
Figura 37: Esquemático hidráulico proposto. Fonte: Autoria própria.
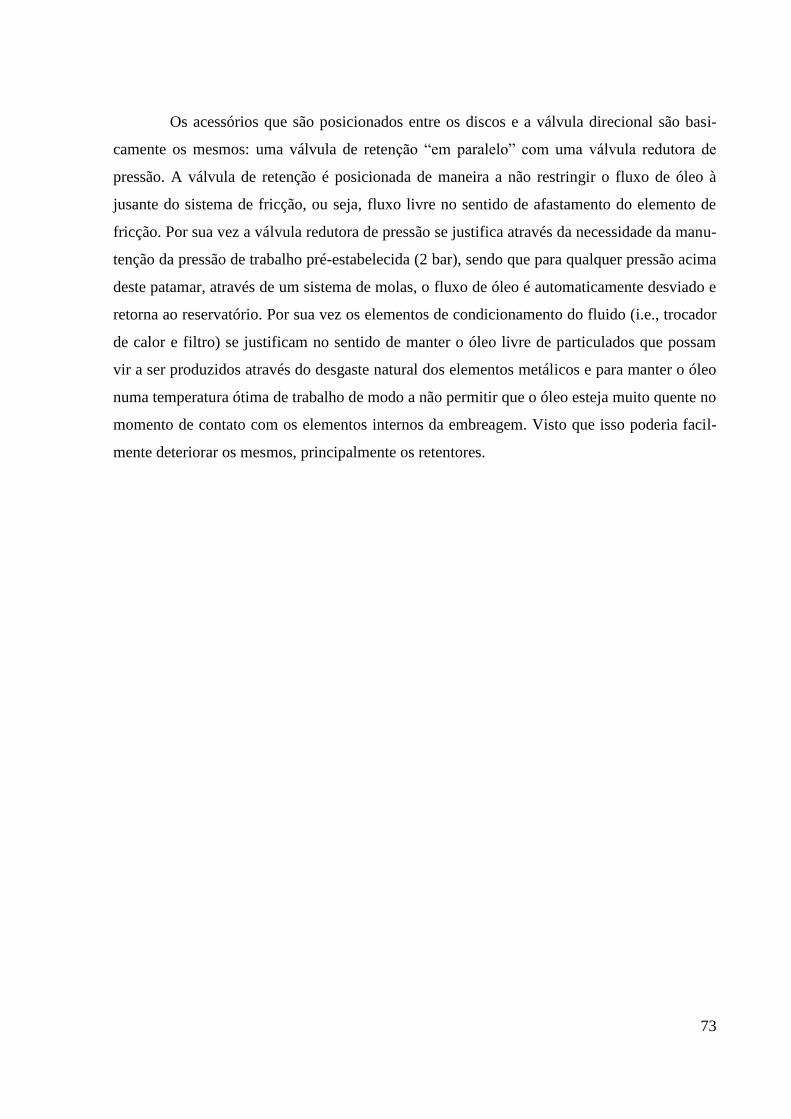
73
Os acessórios que são posicionados entre os discos e a válvula direcional são basi-
camente os mesmos: uma válvula de retenção “em paralelo” com uma válvula redutora de
pressão. A válvula de retenção é posicionada de maneira a não restringir o fluxo de óleo à
jusante do sistema de fricção, ou seja, fluxo livre no sentido de afastamento do elemento de
fricção. Por sua vez a válvula redutora de pressão se justifica através da necessidade da manu-
tenção da pressão de trabalho pré-estabelecida (2 bar), sendo que para qualquer pressão acima
deste patamar, através de um sistema de molas, o fluxo de óleo é automaticamente desviado e
retorna ao reservatório. Por sua vez os elementos de condicionamento do fluido (i.e., trocador
de calor e filtro) se justificam no sentido de manter o óleo livre de particulados que possam
vir a ser produzidos através do desgaste natural dos elementos metálicos e para manter o óleo
numa temperatura ótima de trabalho de modo a não permitir que o óleo esteja muito quente no
momento de contato com os elementos internos da embreagem. Visto que isso poderia facil-
mente deteriorar os mesmos, principalmente os retentores.
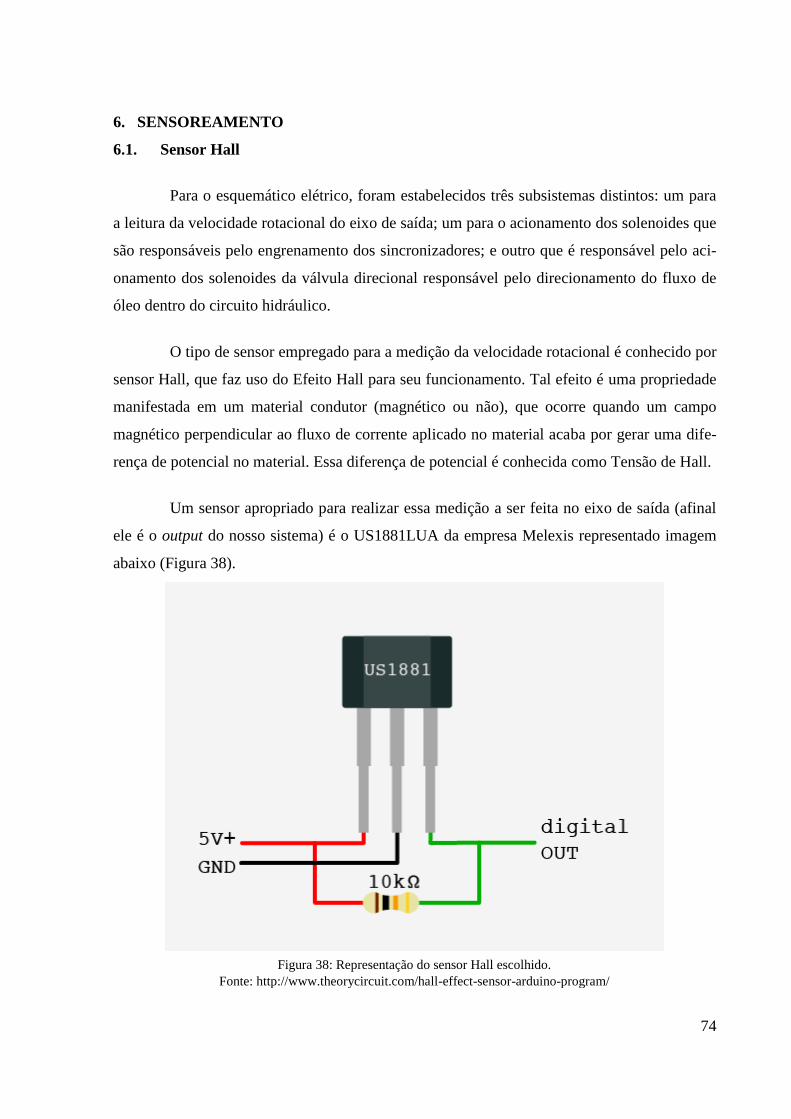
74
6. SENSOREAMENTO
6.1. Sensor Hall
Para o esquemático elétrico, foram estabelecidos três subsistemas distintos: um para
a leitura da velocidade rotacional do eixo de saída; um para o acionamento dos solenoides que
são responsáveis pelo engrenamento dos sincronizadores; e outro que é responsável pelo aci-
onamento dos solenoides da válvula direcional responsável pelo direcionamento do fluxo de
óleo dentro do circuito hidráulico.
O tipo de sensor empregado para a medição da velocidade rotacional é conhecido por
sensor Hall, que faz uso do Efeito Hall para seu funcionamento. Tal efeito é uma propriedade
manifestada em um material condutor (magnético ou não), que ocorre quando um campo
magnético perpendicular ao fluxo de corrente aplicado no material acaba por gerar uma dife-
rença de potencial no material. Essa diferença de potencial é conhecida como Tensão de Hall.
Um sensor apropriado para realizar essa medição a ser feita no eixo de saída (afinal
ele é o output do nosso sistema) é o US1881LUA da empresa Melexis representado imagem
abaixo (Figura 38).
Figura 38: Representação do sensor Hall escolhido. Fonte: http://www.theorycircuit.com/hall-effect-sensor-arduino-program/

75
Seus dados básicos podem ser encontrados de maneira mais elaborada na folha de
dados em anexo.
6.2. Microcontrolador
Como já fora dito no subcapítulo 5.2, o microcontrolador utilizado será o Arduino
Due (Figura 39). Este microcontrolador, como todas as placas de fabricação Arduino possui
as características de ser uma plataforma de prototipagem rápida; de hardware livre e de placa
única em uma linguagem de programação que se assemelha muito ao C/C++.
A placa escolhida possui as seguintes características básicas: voltagem máxima 3.3 V;
54 pinos digitais input/output; 12 entradas analógicas; 512 kB de memória flash; frequência
de processamento 84 MHz; e 96 kB de RAM.
Tabela 21: Especificações do sensor Hall.
Figura 39: Microcontrolador Arduino Due.
Fonte: https://www.filipeflop.com/blog/arduino-due-atmel-arm-32bits/
76
6.3. Visor de LCD
Para auxiliar o condutor do protótipo, é interessante que haja uma tela de LCD no in-
terior do carro para que haja um maior controle de qual marcha e qual rotação o veículo está
desempenhando. O visor escolhido é um visor 16x2 com 14 pinos; backlight azul e escrita
branca.
6.4. Relés
Relés são dispositivos que são empregados quando o desejo de troca de contatos, ou
seja, sempre que se tem necessidade de “ligar e desligar” um componente que esteja à frente
do relé, ou ainda para operações mais complexas como integrar vários componentes em uma
única unidade.
Os relés existem em diferentes configurações, bem como em diferentes voltagens CC
para operar suas bobinas. Para o projeto, dois relés de 5V e 10A serão empregados para ope-
rar as duas bombas de óleo.
Figura 40: Exemplo de visor de LED a ser empregado. Fonte: http://www.hobbytronics.co.uk/lcd-16-2-backlight-blue
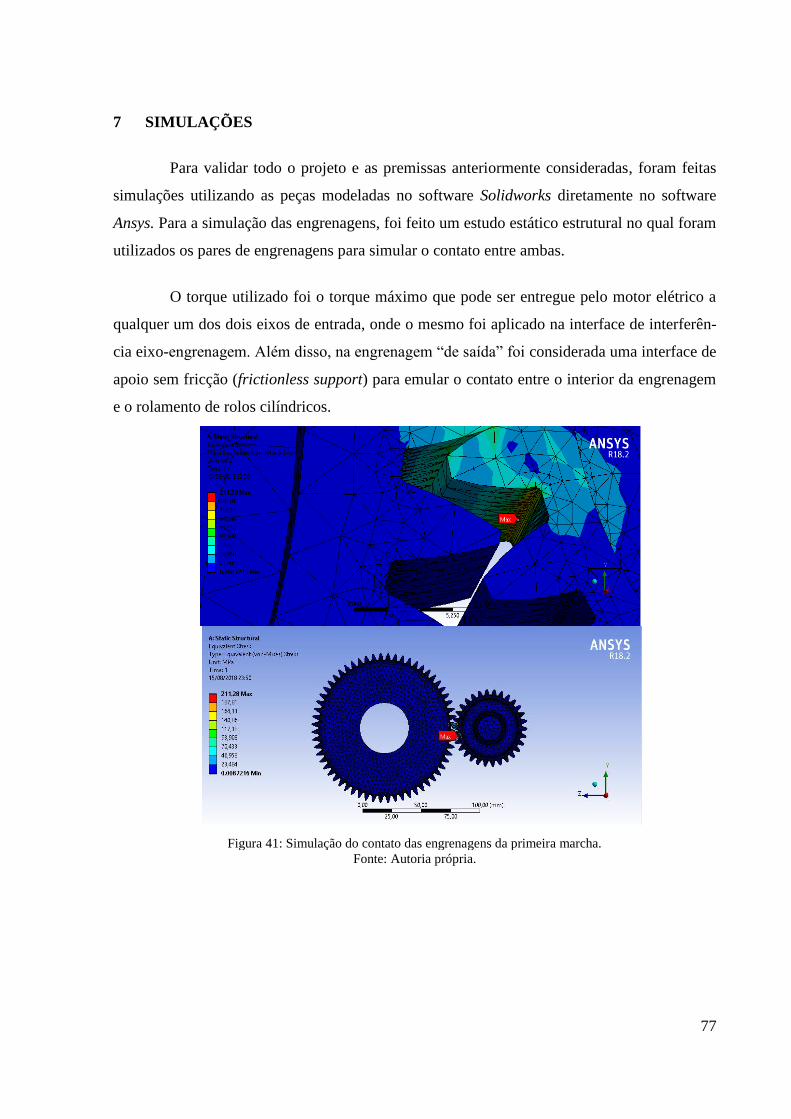
77
7 SIMULAÇÕES
Para validar todo o projeto e as premissas anteriormente consideradas, foram feitas
simulações utilizando as peças modeladas no software Solidworks diretamente no software
Ansys. Para a simulação das engrenagens, foi feito um estudo estático estrutural no qual foram
utilizados os pares de engrenagens para simular o contato entre ambas.
O torque utilizado foi o torque máximo que pode ser entregue pelo motor elétrico a
qualquer um dos dois eixos de entrada, onde o mesmo foi aplicado na interface de interferên-
cia eixo-engrenagem. Além disso, na engrenagem “de saída” foi considerada uma interface de
apoio sem fricção (frictionless support) para emular o contato entre o interior da engrenagem
e o rolamento de rolos cilíndricos.
Figura 41: Simulação do contato das engrenagens da primeira marcha. Fonte: Autoria própria.

78
Figura 43: Simulação do contato das engrenagens da terceira marcha. Fonte: Autoria própria.
Figura 42: Simulação do contato das engrenagens da segunda marcha. Fonte: Autoria própria.

79
Para todas as engrenagens o input das simulações foi o mesmo: O uso do momento
nominal do motor, i.e. 13 N.m com uma malha adaptativa de tamanho médio. Com isso, as
tensões máximas obtidas foram: 211,28 MPa para o par de engrenagem da primeira marcha;
139,89 MPa para o par da segunda marcha; 112,94 MPa para o par da terceira marcha; e
102,27 MPa para o par de engrenagem da quarta marcha, onde todas estas tensões máximas se
observaram na região do flanco ou da face das engrenagens, evidenciando um maior desgaste
superficial em comparação à flexão do dente, justamente como evidenciado na fase de
projeto.
Por sua vez, para a simulação dos eixos, dividimos em eixos de entrada e eixo de
saída. Uma premissa foi a de realizar a simulação idealizando um caso no qual o carro estaria
sendo freado e acelerado ao msmo tempo, pois isso refletiria maiores esforços nos eixos.
Dando prosseguimento, a simulação foi feita da seguinte maneira para os eixos de
entrada: torque e rotação correspondentes ao pior caso para cada eixo, i.e., para o eixo maciço
foram utilizados os valores para a primeira marcha, e para o eixo vazado, os valores
empregados foram os da segunda marcha; suporte cilindrico livre para as engrenagens que
Figura 44: Simulação do contato das engrenagens da quarta marcha. Fonte: Autoria própria.

80
não foram tratadas como “piores casos”; e de maneira análoga, suporte fixo nas engrenagens
referentes aos casos determinados como piores.Já para o eixo de saída, teve-se: torque e
rotação correspondentes ao pior caso, i.e., aos parametros da primeira marcha; e suporte
cilindrico fixo para a região da engrenagem da primeira marcha e livre para as regiões das
demais engrenagens.
Por sua vez, para os eixos, foram usadas as seguintes condições de contorno: para os
eixos de entrada, foi usado o momento de input do motor (13 N.m). Já para o eixo de saída,
foi usado o maior torque de saída possivel, i.e. 26 N.m relativo ao torque de saída da primeira
marcha. As malhas usadas foram malhas adaptativas de tamanho médio. Os resultados para
tensões maximas obtidas foram: 25,52 MPa para o eixo de entrada maciço; 6,74 MPa para o
eixo de entrada vazado; e 51,23 MPa para o eixo de saída.
Figura 45: Simulação do eixo de entrada maciço.
Fonte: Autoria própria.
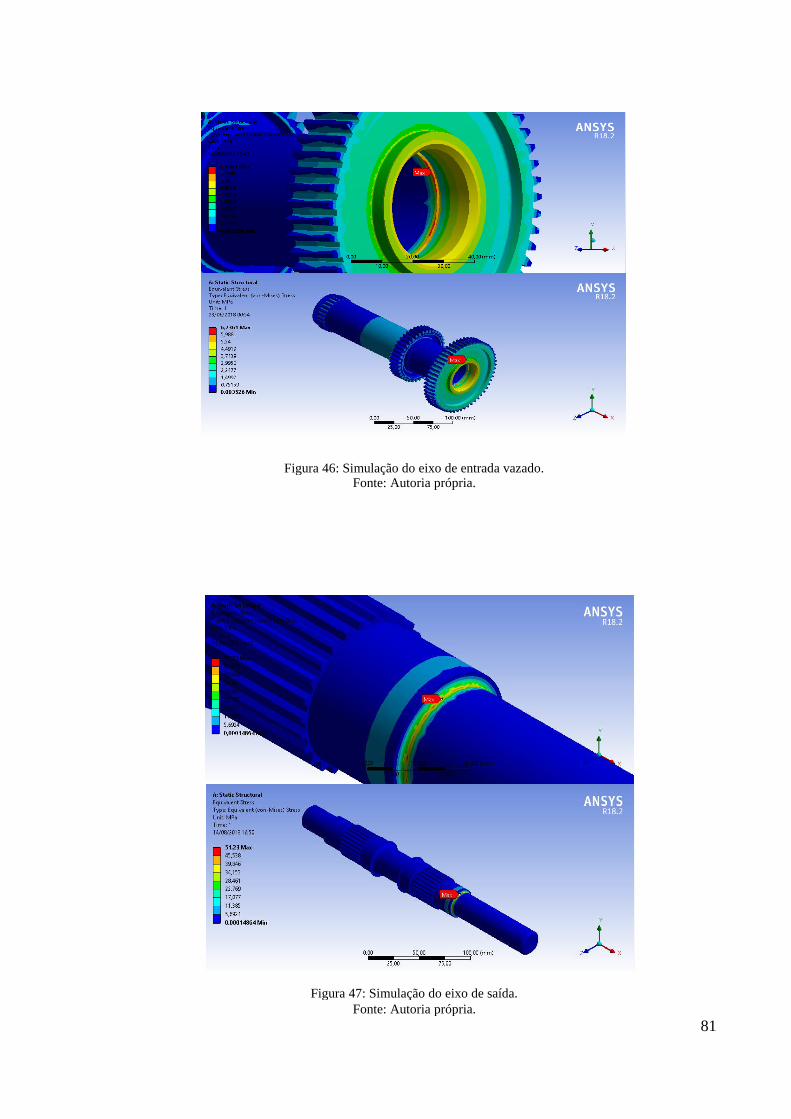
81
Figura 47: Simulação do eixo de saída. Fonte: Autoria própria.
Figura 46: Simulação do eixo de entrada vazado. Fonte: Autoria própria.

82
8 CONCLUSÃO
Como a equipe Minerva eRacing na presente data desde Projeto Final é uma equipe
ainda incipiente a ponto de empregarem a variação de velocidades através de um variador de
corrente, não existem muitos dados conclusivos para que seja possível a comparação entre
performances. No entanto, é sabido que a associação de motores elétricos com caixas de
transmissão mecânicas para pequenos motores elétricos é uma combinação que se prova ser
mais eficaz e que produz melhores resultados para veículo leves como o FSAE Elétrico.
Para o motor estudado, a potência máxima em condições normais de uso está limita-
da a 6 kW. Devido à natureza dos movimentos rotativos, a potência inicial de um motor é zero
e cresce gradualmente junto com o aumento da rotação até chegar ao limite de potência, onde
se torna constante (neste caso, 6 kW). Isto significa que para baixas rotações não há uma
transmissão de toda a potência a qual o motor é capaz de fornecer. Neste caso, é interessante a
presença de um variador de velocidades mecânico que faça com que esta porção da curva
“Potencia-RPM” seja a mais inclinada possível, propiciando, assim, ao veículo o máximo de
potência possível para baixas rotações.
Com o sistema proposto, o veículo desenvolverá uma velocidade máxima de aproxi-
madamente 116 km/h @ 4400 RPM além de, quando em primeira marcha, um torque de 26
N.m, o que permite que o veículo de FSAE suba aclives de até 45°, algo muito acima do que a
categoriza preza e/ou permite.
Um ponto importante a ser frisado é o preço do sistema. Como depende da aquisição
de bens comerciais (Discos de fricção; sincronizadores; rolamentos; entre outros), além da
usinagem de algumas partes em torno CNC, pode ser interessante para a equipe a busca por
uma parceria para a fabricação do mecanismo.
Como sugestão de trabalhos futuros, fica a possibilidade da concepção de uma me-
lhor geometria para a carcaça, além do estudo para redução de massa de componentes (e.g.
engrenagens, eixos e estruturas da embreagem).

83
9 REFERÊNCIAS BIBLIOGRÁFICAS
[1] http://portal.saebrasil.org.br/programas-estudantis/formula-sae-brasil. Acesso em
18/10/2017.
[2] BUDYNAS, Richard Gordon et al. Shigley's mechanical engineering design. New
York: McGraw-Hill, 2008.
[3] https://carbuzz.com/news/carbuzz-explains-the-double-clutch-transmission. Acesso
em 25/01/2018.
[4] ECKERT, J. J. et al. Avaliação do desempenho em aclives de veículos híbri-
dos. SIMEA XX Simpósio Internacional de Engenharia Automotiva, 2012
[5] BHANDARI, V. B. Design of machine elements. Tata McGraw-Hill Education, 2010.F
[6] ORŁOWICZ, A. W. et al. Coefficient of Friction of a Brake Disc-Brake Pad Friction
Couple. Archives of Foundry Engineering, v. 16, n. 4, p. 196-200, 2016.
[7] BOILER, A. S. M. E.; CODE, Pressure Vessel. section III. 1998.
[8] http://www.rlhudson.com/media/RLHudson-Shaft-Seal-Guide.pdf. Acesso em
14/02/2018.
[9] FRISOLI, Antonio; AVIZZANO, Carlo Alberto; BERGAMASCO, Massimo. Simulation
of a manual gearshift with a 2-dof force-feedback joystick. In: Robotics and Automation, 2001. Pro-
ceedings 2001 ICRA. IEEE International Conference on. IEEE, 2001. p. 1364-1369.
[10] WIKANDER, Örjan. Sources of energy and exploitation of power. In: The Oxford
handbook of engineering and technology in the classical world. 2008.
[11] Mark Wan. "Transmission - Twin-Clutch Gearbox". AutoZine Technical School, 2009
[12] LECHNER, Giesbert; NAUNHEIMER, Harald. Automotive transmissions: fundamen-
tals, selection, design and application. Springer Science & Business Media, 1999.
[13] DIAS, João. Curso de especialização em Engenharia Automotiva. Modulo: Transmis-
sões. UFTPR, (2011).
[14] AMENDOLA, Cesar Henrique Ferreira. “Análise das estratégias de troca de marchas
da transmissão automática convencional em comparação com a transmissão de dupla embreagem,

84
2005, 134f”. Trabalho de Conclusão de Curso (Mestrado em Engenharia Automotiva)–Universidade
de São Paulo, São Paulo, (2005).
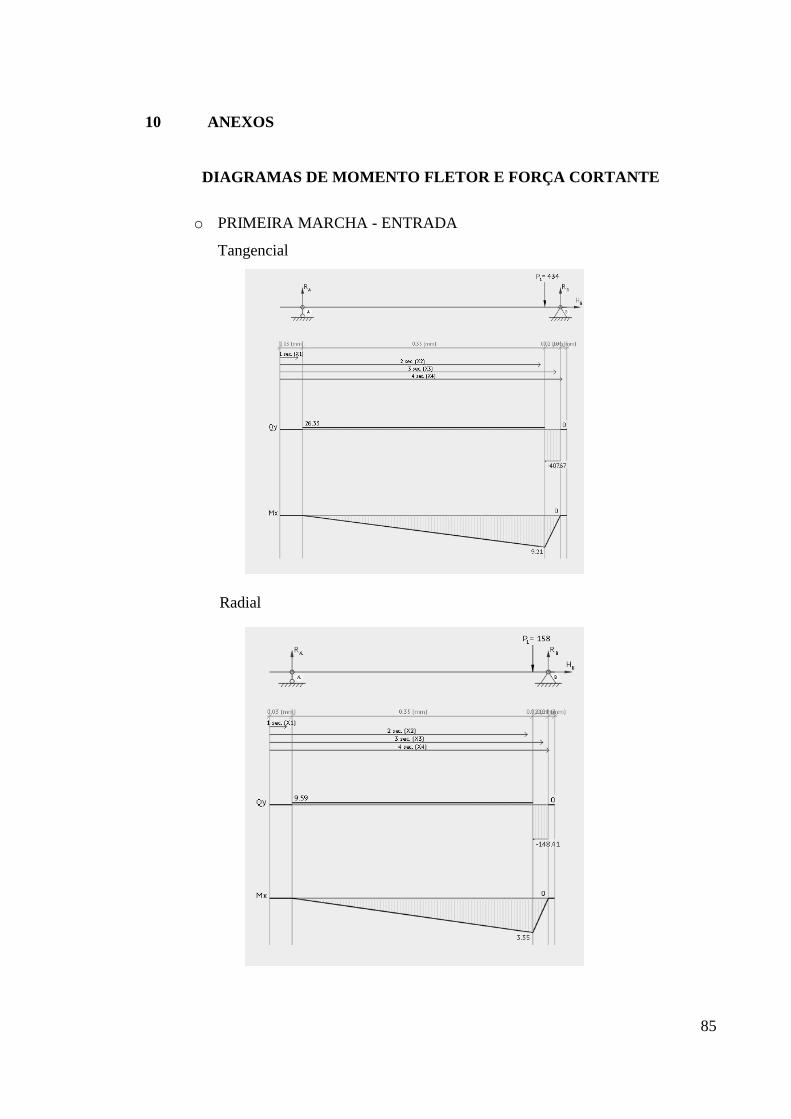
85
10 ANEXOS
DIAGRAMAS DE MOMENTO FLETOR E FORÇA CORTANTE
o PRIMEIRA MARCHA - ENTRADA
Tangencial
Radial
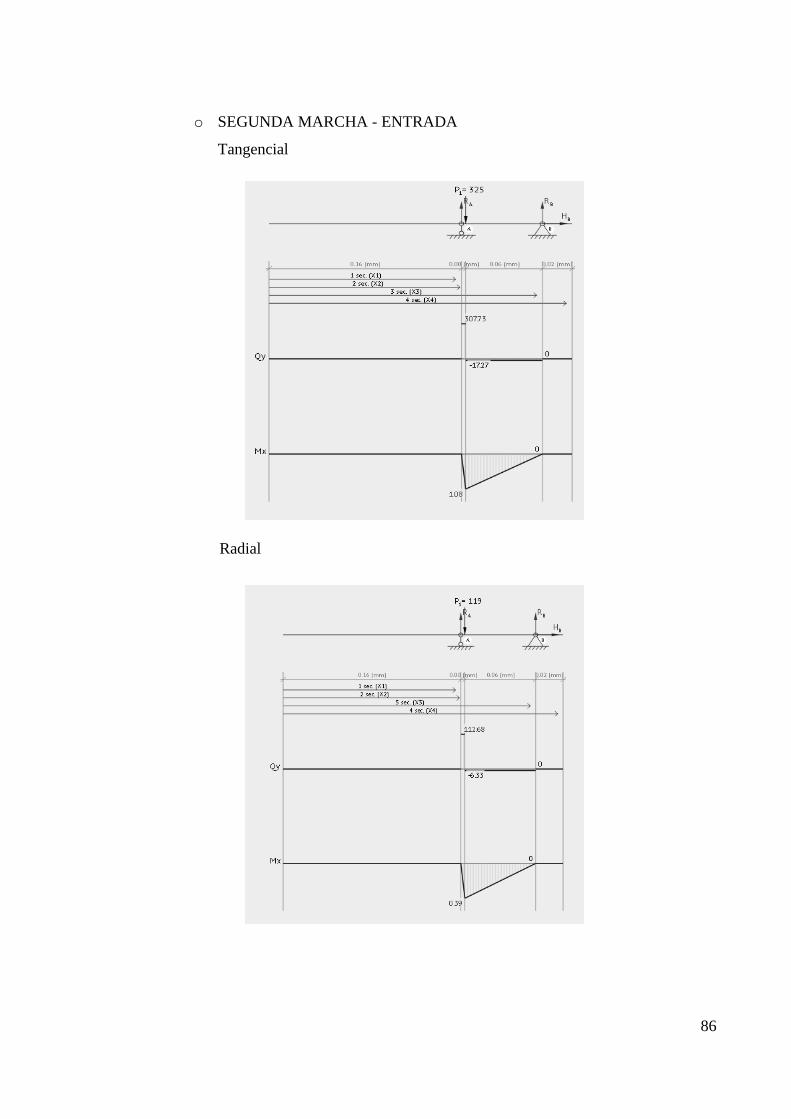
86
o SEGUNDA MARCHA - ENTRADA
Tangencial
Radial
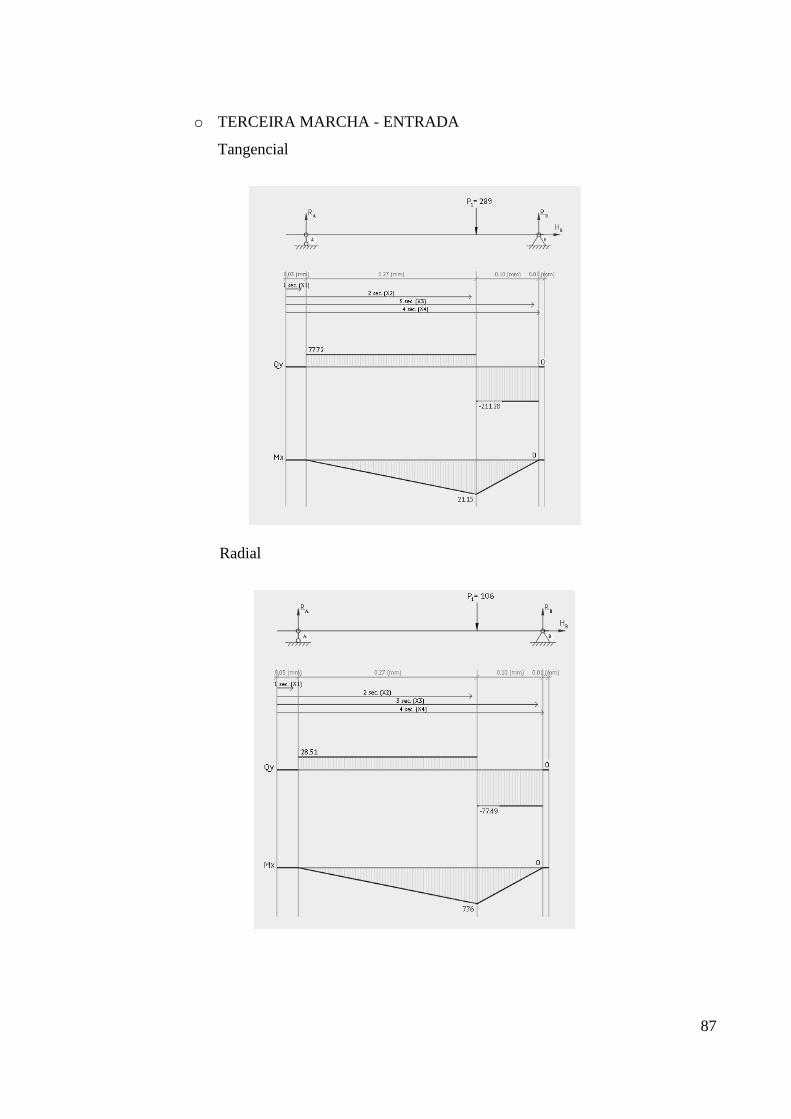
87
o TERCEIRA MARCHA - ENTRADA
Tangencial
Radial
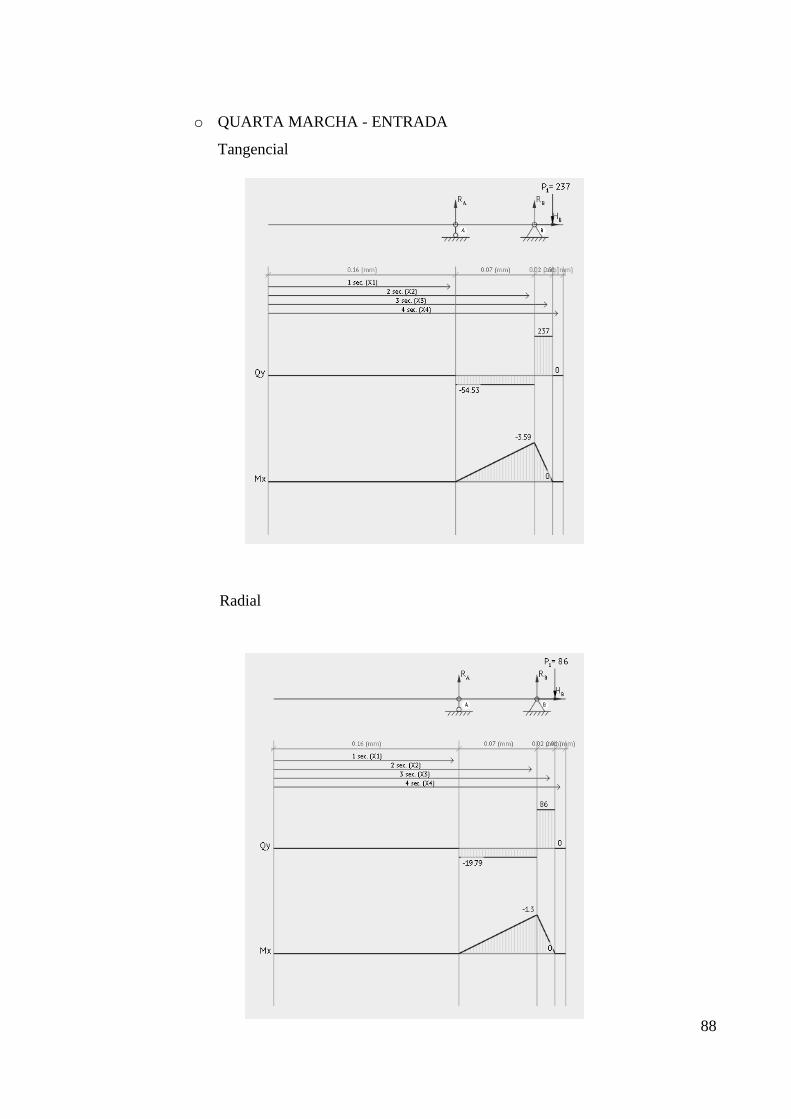
88
o QUARTA MARCHA - ENTRADA
Tangencial
Radial

89
o PRIMEIRA MARCHA - SAÍDA
Tangencial
Radial
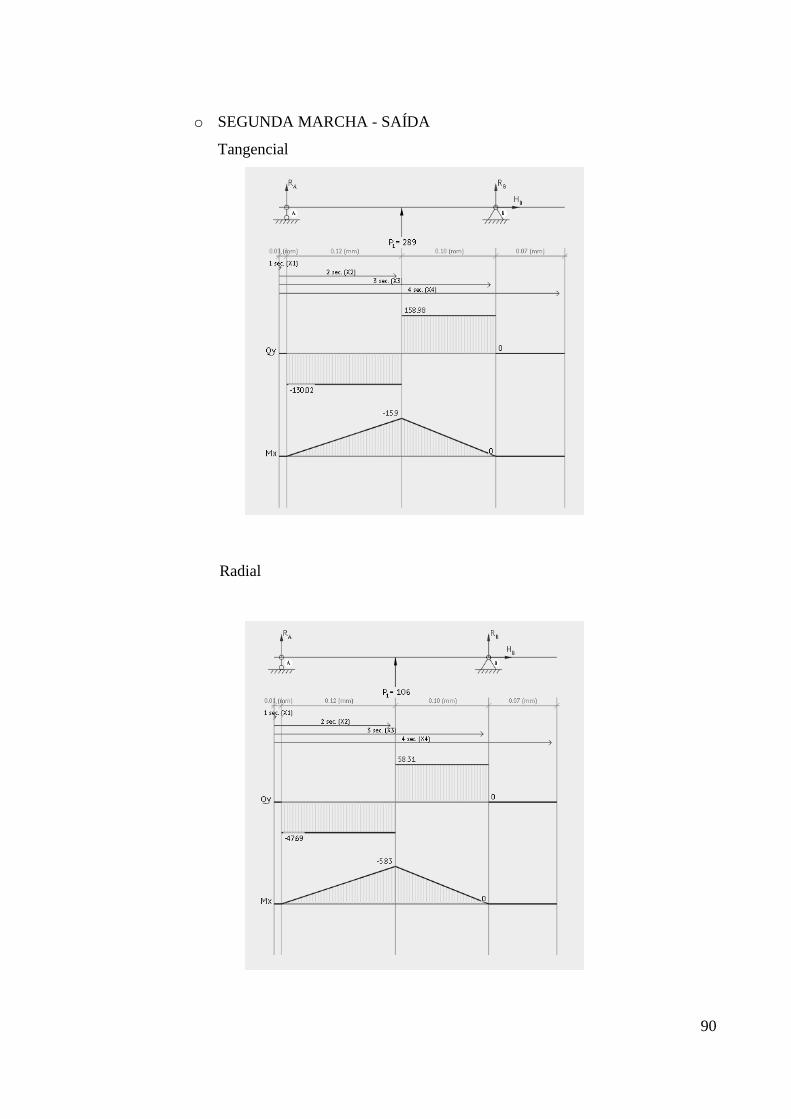
90
o SEGUNDA MARCHA - SAÍDA
Tangencial
Radial
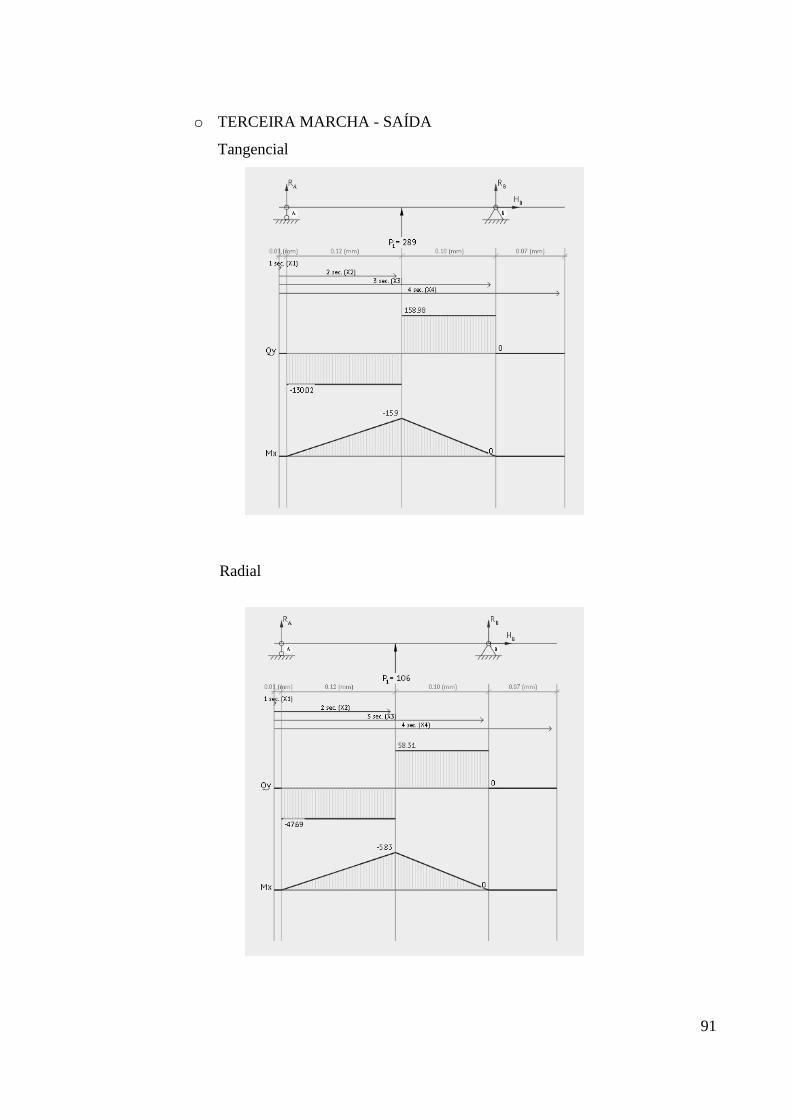
91
o TERCEIRA MARCHA - SAÍDA
Tangencial
Radial

92
o QUARTA MARCHA - SAÍDA
Tangencial
Radial

100908070605040302
111213141516171819202122232425262728
01
1 2 3 4 5 6 7 8 9 10 11 12 14
16
18
19
20
2224 2325262728
15
13
21
17
1º Diedro
Escala: 1:5
Unidade: mm
Desenho 01
UFRJ
Data: 29/08/2018
Projeto Final - UFRJProf.: Fernando A. de N. C. Pinto
Desenho de conjunto
Pedro Ivo Meirinho Galvão
Suporte de discos - Ímpar
Segunda engrenagem - Saída
Tampa frontal - Ímpar
010101010101010101
010101010101010101010601010101010101
01
Tampa frontal - ParTampa batente - Ímpar
Suporte discos - Par
Atuador dos discos - Ímpar
Tampa traseira - ParAbrigo do colar - ÍmparAtuador dos discos - Par
Quarta engrenagem - SaídaEixo de saída
Terceira engrenagem - SaídaPrimeira engrenagem - Saída
Junta de vedaçãoCarcaça - Hemisfério inferior
ChavetaEixo de entrada - Ímpar
Primeira engrenagem - EntradaTerceira engrenagem - EntradaQuarta engrenagem - Entrada
Segunda engrenagem - EntradaEixo de saída - Vazado
Carcaça - Hemisfério superiorDistribuidor hidráulicoTampa traseira - Ímpar
Fixação do colar - Ímpar
Abrigo do colar - Par
Nome da peçaQtd.Item
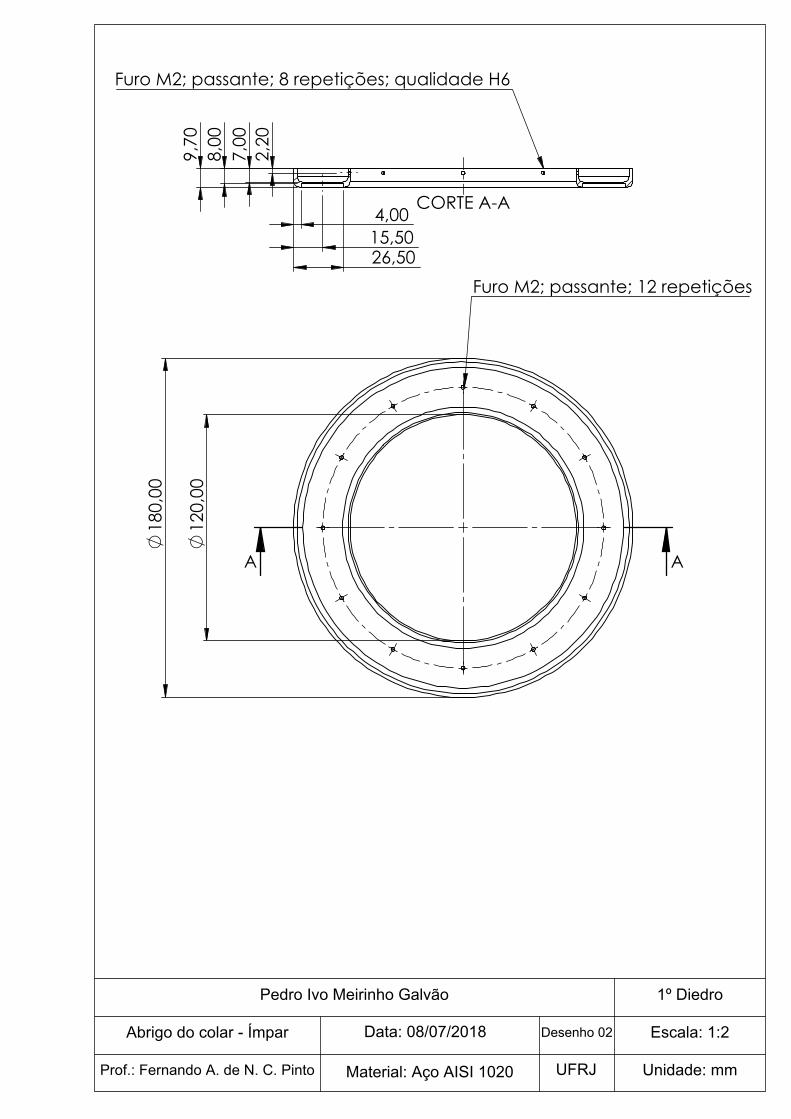
18
0,00
12
0,00
AA
Furo M2; passante; 12 repetições
9,7
0 8
,00
7,0
0 2
,20
26,50 15,50 4,00
CORTE A-A
Furo M2; passante; 8 repetições; qualidade H6
Pedro Ivo Meirinho Galvão
Data: 08/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 02
Unidade: mm
Escala: 1:2
1º Diedro
Abrigo do colar - Ímpar
Material: Aço AISI 1020
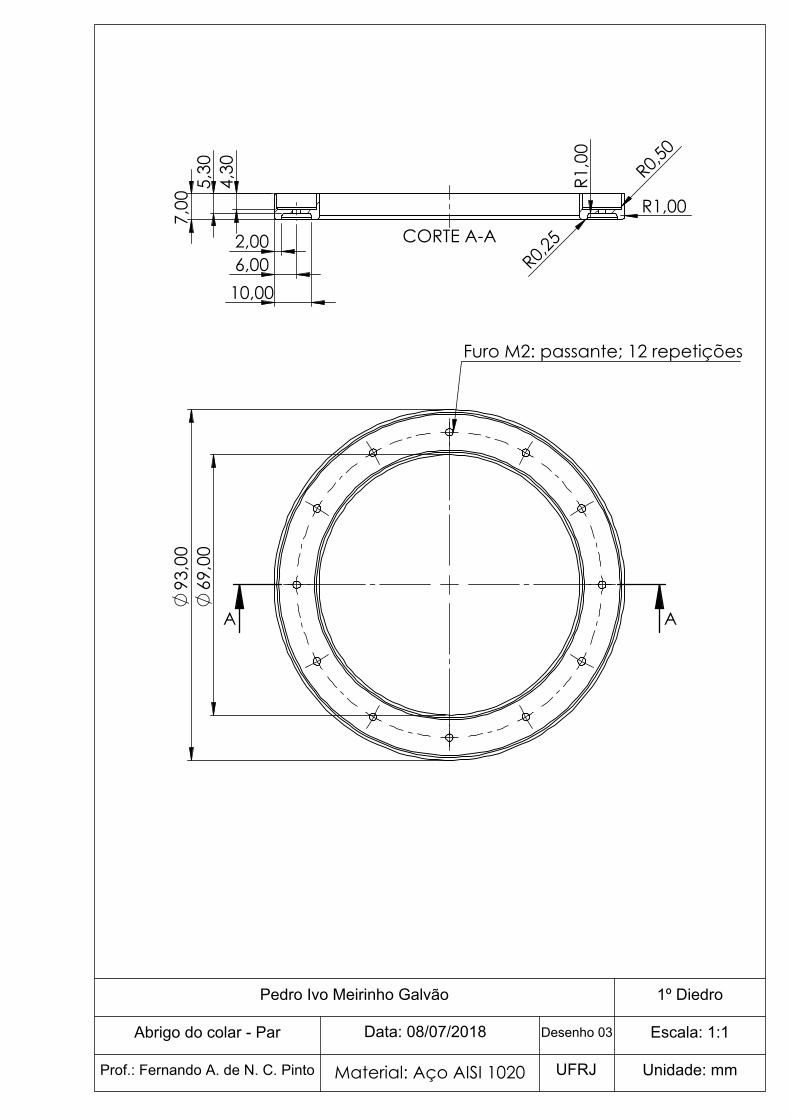
69
,00
93
,00
AA
Furo M2: passante; 12 repetições
7,0
0 4,3
0 5
,30
10,00 6,00 2,00
R0,50
R1,00
R0,25
R1,
00
CORTE A-A
Pedro Ivo Meirinho Galvão
Data: 08/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 03
Unidade: mm
Escala: 1:1
1º Diedro
Abrigo do colar - Par
Material: Aço AISI 1020
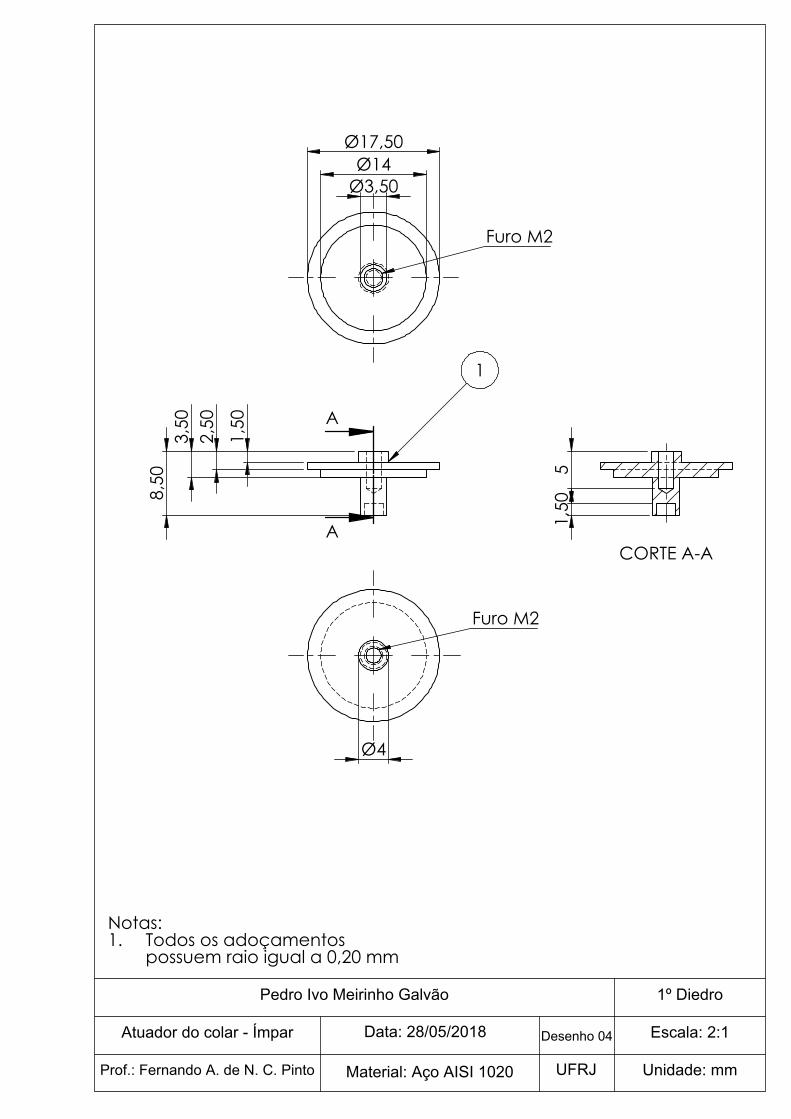
8,5
0 3
,50
2,5
0
1,5
0 A
A
1
Ø4
Furo M2
Ø17,50 Ø14
Ø3,50
Furo M2
1,5
0 5
CORTE A-A
Notas:Todos os adoçamentos1.possuem raio igual a 0,20 mm
Pedro Ivo Meirinho Galvão
Data: 28/05/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 04
Unidade: mm
Escala: 2:1
1º Diedro
Atuador do colar - Ímpar
Material: Aço AISI 1020
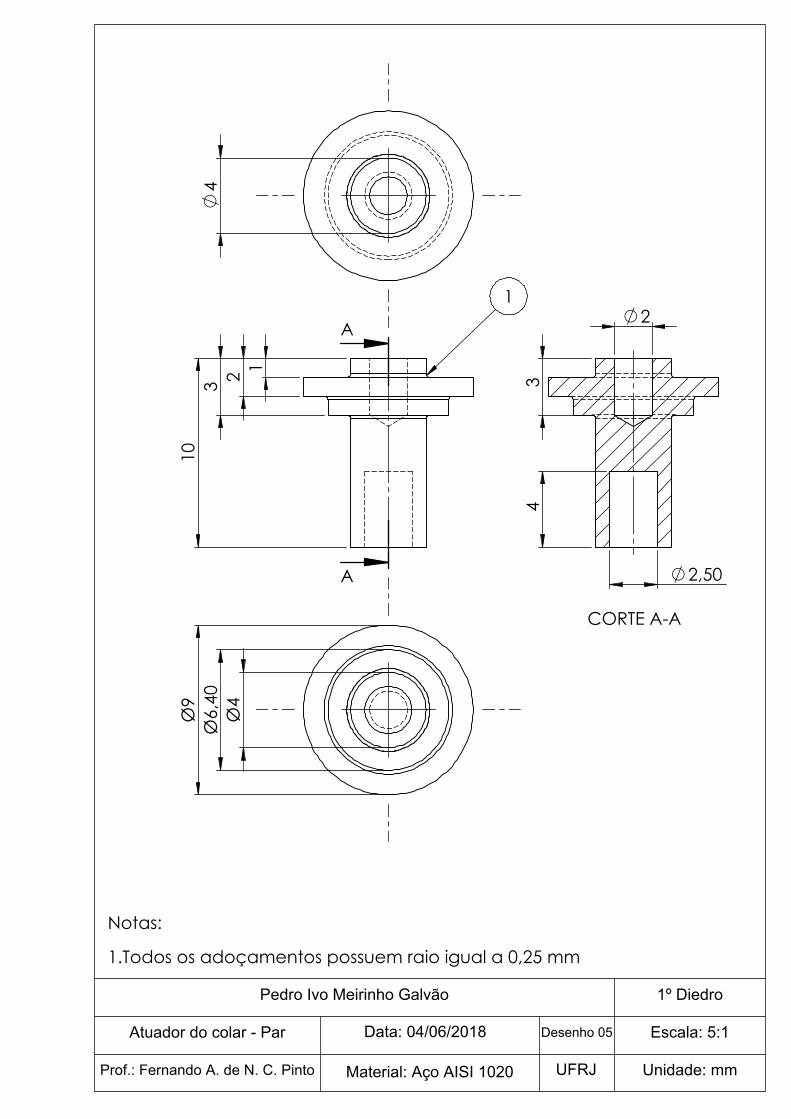
10
1
2
3
A
A
1
4
Ø9
Ø6,
40
Ø4
4
2,50
3
2
CORTE A-A
Notas:
1.Todos os adoçamentos possuem raio igual a 0,25 mm
Pedro Ivo Meirinho Galvão
Data: 04/06/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 05
Unidade: mm
Escala: 5:1
1º Diedro
Atuador do colar - Par
Material: Aço AISI 1020

Ø70,5 Ø50
Ø136 Ø102
AA
A
D
D
Ø10
4 h8
2 33,5
N6
0,9
0
DETALHE AESCALA 5 : 1
Diâmetro de raiz: 102 mmMódulo: 2 mm51 dentes
2
2
Ø10
0,20
2
33,5 31,5 12,5
11 9,50
9
1
60
H10
B
CORTE D-DESCALA 1 : 1
Chanfro: 1,50 mm e 60°
R0,25 R0,25
4,7
5
6,5
DETALHE BESCALA 2 : 1
Nota:Todos os adoçamentos 1.possuem raio igual a 1 mm
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 06
UFRJ
Data: 25/05/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Atuador dos discos - Ímpar
Pedro Ivo Meirinho Galvão
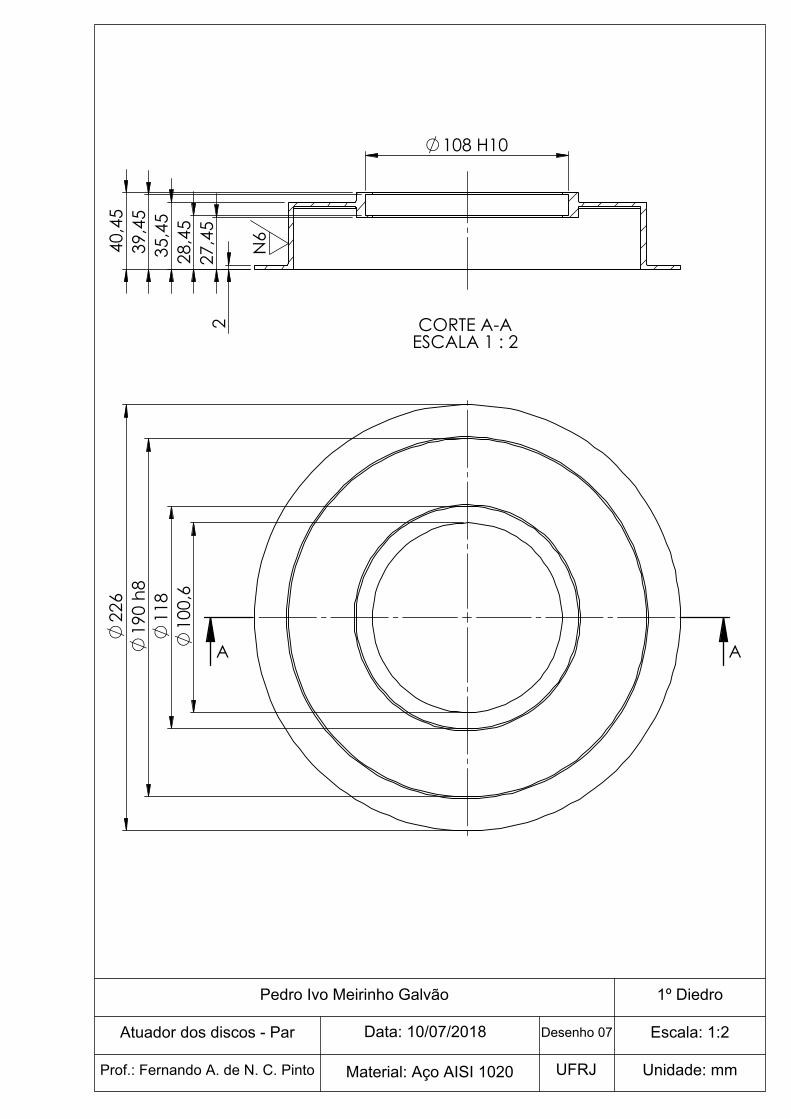
22
6
10
0,6
11
8
190
h8
AA
40,
45
39,
45
35,
45
28,
45
27,
45
2
108 H10
CORTE A-AESCALA 1 : 2
N6
Pedro Ivo Meirinho Galvão
Data: 10/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 07
Unidade: mm
Escala: 1:2
1º Diedro
Atuador dos discos - Par
Material: Aço AISI 1020

12,
50
11,
50
Ø14
Ø
12
Ø2
Pedro Ivo Meirinho Galvão
Data: 28/05/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 08
Unidade: mm
Escala: 5:1
1º Diedro
Bucha Interna - Ímpar
Material: Aço AISI 1020
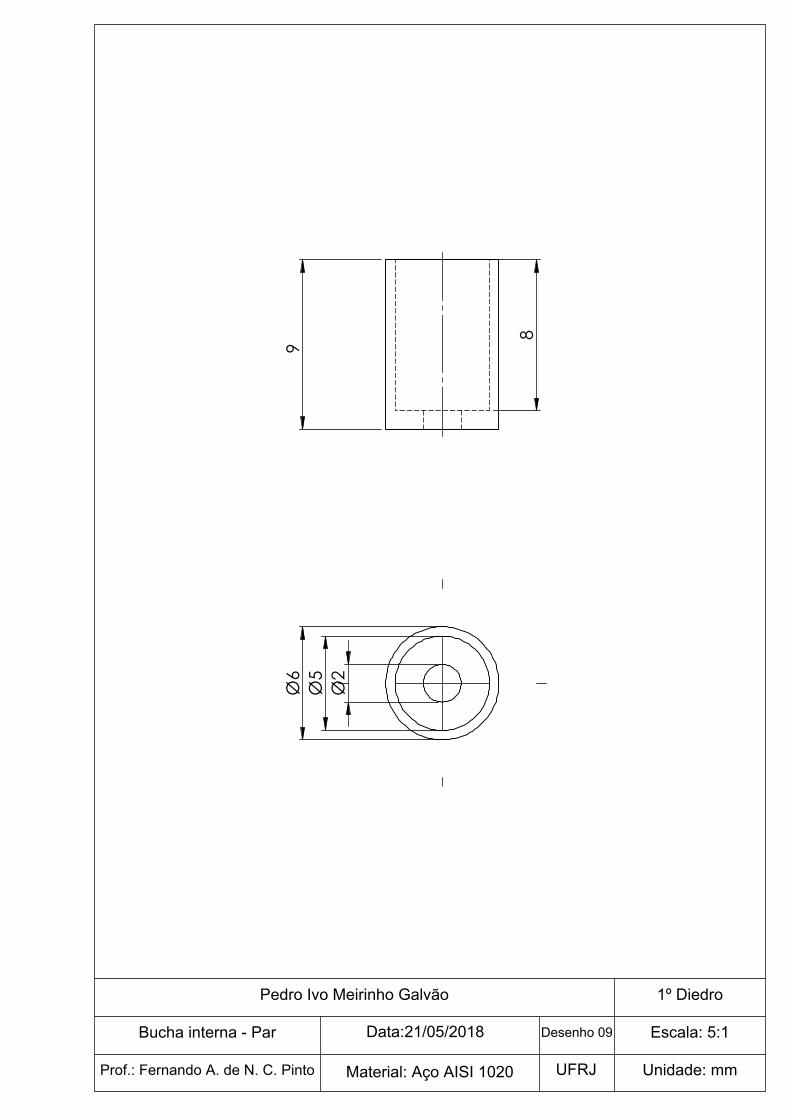
Ø2
Ø5
Ø6
9 8
Pedro Ivo Meirinho Galvão
Data:21/05/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 09
Unidade: mm
Escala: 5:1
1º Diedro
Bucha interna - Par
Material: Aço AISI 1020

115
1
10
105
65
R33 R32
R15,8 R25,5 R32 B
242 229
26 5
8
10
178
,4
158
,4
133
,8
113
,8
89,
2 6
9,2
44,
6
24,
6
173
,5 1
01,5
2
9,5
74 74
21
26
A
200 173,93
138,93 106,43
66,43 20
80,25
27,
00
38,93 93,93 109,07
20 63,57
23,
5 2
8,5
62 H8 42H8
62 H8
2
20,
00
15,05
R10,00
7,55
7,50
DETALHE AESCALA 1 : 1
Furo M5Passante
5
R0,2
1,5
DETALHE BESCALA 5 : 1
1
252,25
142 132
71 61
R23 R33 R15,5
47
Notas: Chanfro 0,25 x 45°1.Todos os pinos de centragem 2.se encontram na linha média da largura da face.Todos os adoçamentos, caso 3.nao explicitado, possuem raio de adoçamento igual a 2 mm
1º Diedro
Escala: 1:2.5
Unidade: mm
Desenho 10
UFRJ
Data: 08/07/2018
Material: Liga Al-6061-T6Prof.: Fernando A. de N. C. Pinto
Carcaça - Hemisfério inferior
Pedro Ivo Meirinho Galvão
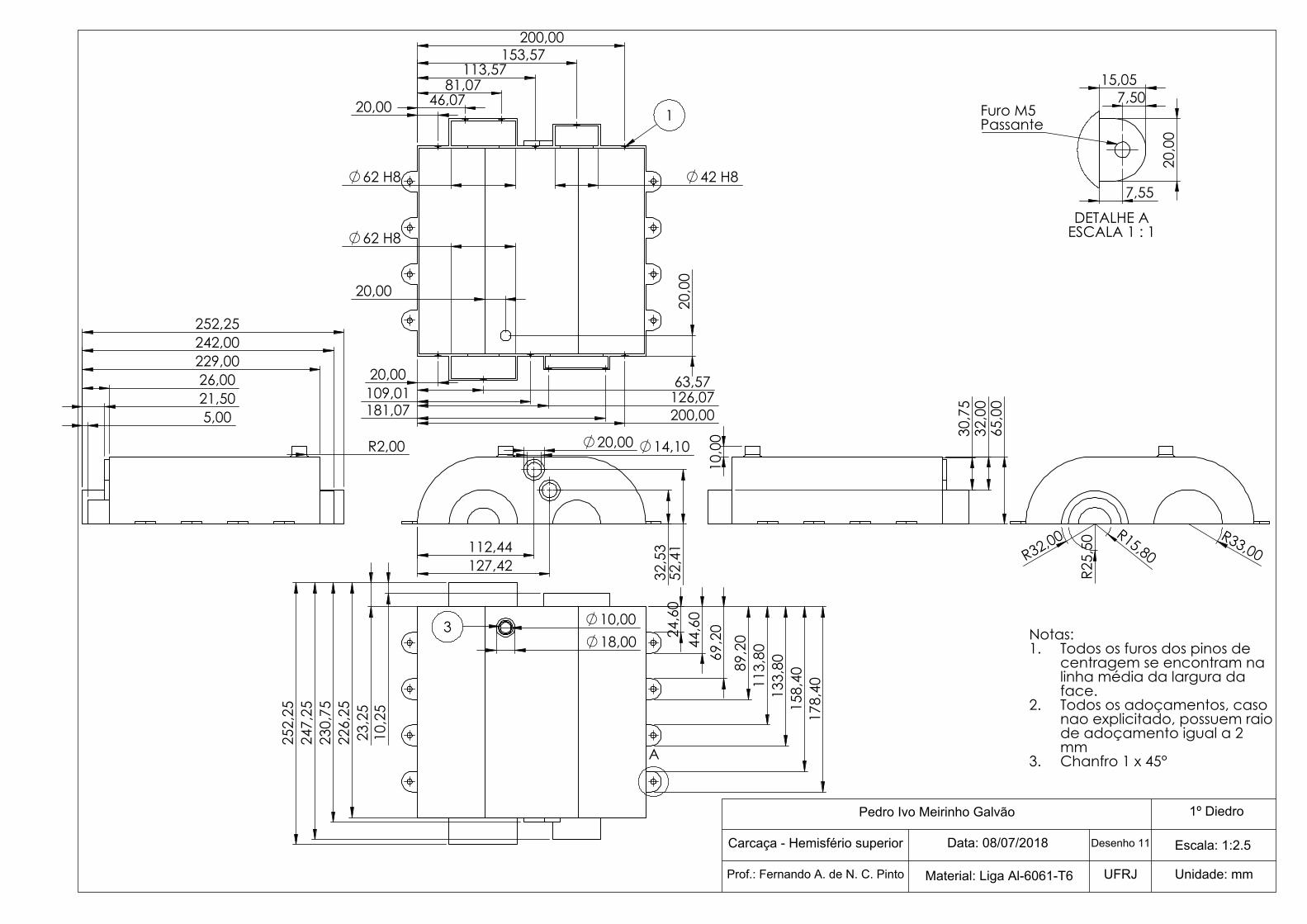
20,00 14,10
32,
53
52,
41
127,42 112,44
252
,25
247
,25
230
,75
226
,25
23,
25
10,
25
178
,40
158
,40
133
,80
113
,80
89,
20
69,
20
44,
60
24,
60
10,00 18,00
A
3
200,00 153,57
113,57 81,07
46,07 20,00
200,00 181,07 126,07 109,01 63,57 20,00
62 H8
62 H8
42 H8
20,
00
20,00
1
65,
00
30,
75
32,
00
10,
00
252,25 242,00 229,00 26,00 21,50 5,00
R2,00
R15,80
R25
,50
R32,00 R33,00
15,05
20,
00
7,50
7,55
DETALHE AESCALA 1 : 1
Furo M5Passante
Notas: Todos os furos dos pinos de 1.centragem se encontram na linha média da largura da face.Todos os adoçamentos, caso 2.nao explicitado, possuem raio de adoçamento igual a 2 mmChanfro 1 x 45°3.
1º Diedro
Escala: 1:2.5
Unidade: mm
Desenho 11
UFRJ
Data: 08/07/2018
Material: Liga Al-6061-T6Prof.: Fernando A. de N. C. Pinto
Carcaça - Hemisfério superior
Pedro Ivo Meirinho Galvão
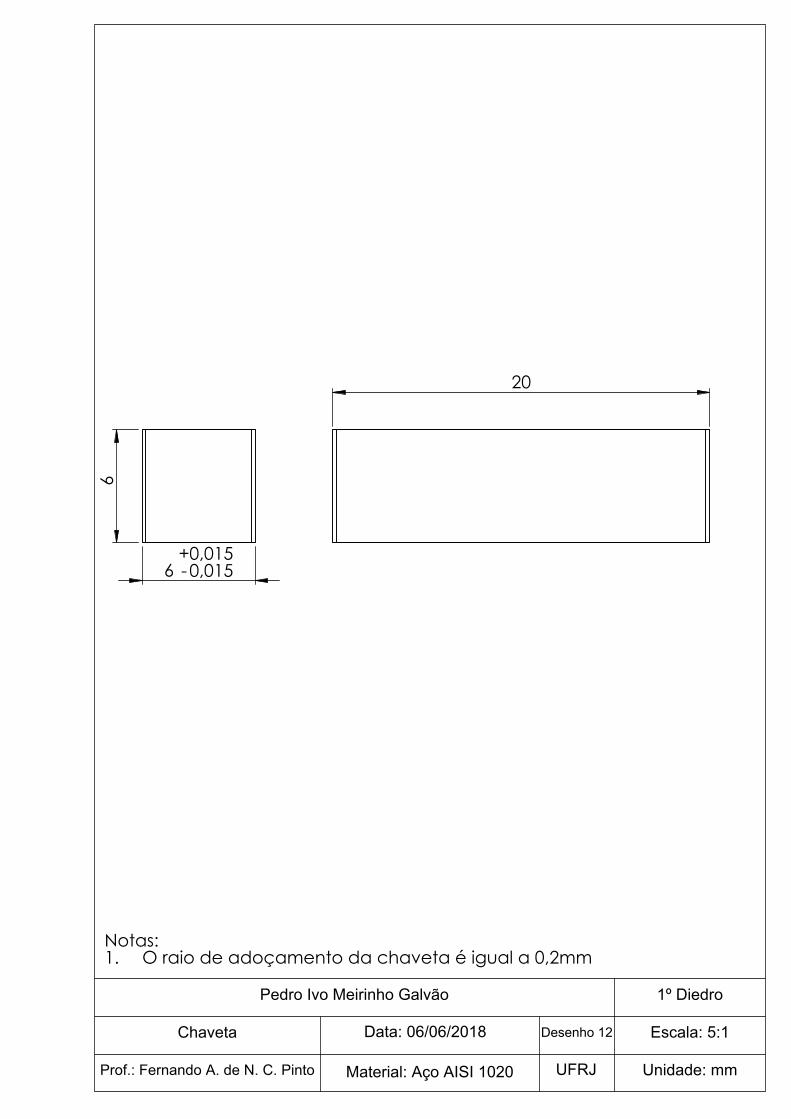
20
6
6 +-0,0150,015
Notas:O raio de adoçamento da chaveta é igual a 0,2mm1.
Pedro Ivo Meirinho Galvão
Data: 06/06/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 12
Unidade: mm
Escala: 5:1
1º Diedro
Chaveta
Material: Aço AISI 1020
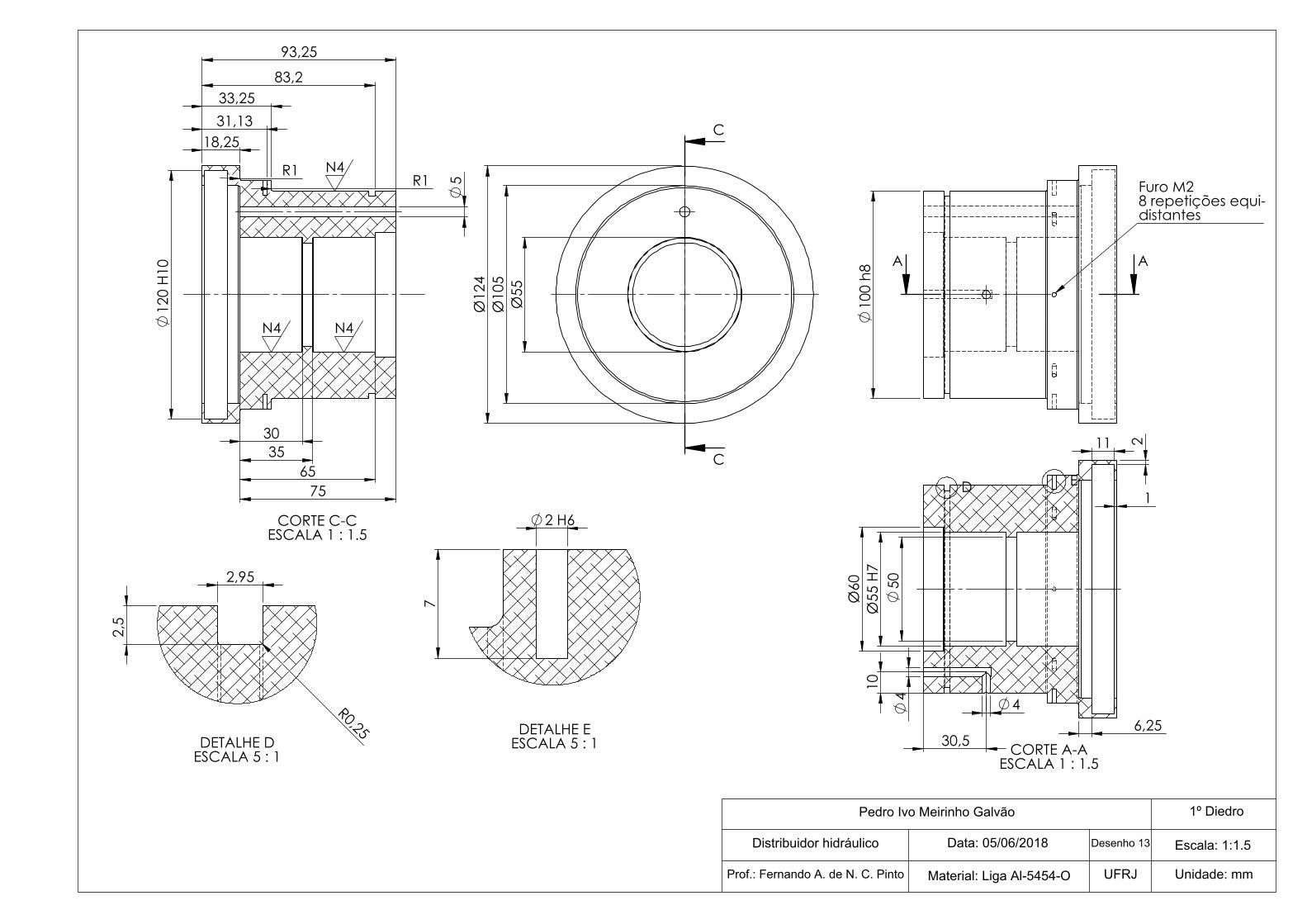
10
0 h8
AA
Furo M28 repetições equi-distantes
Ø60
Ø
55 H
7
1
2
11
6,25 4
4
50
30,5
10
D E
CORTE A-AESCALA 1 : 1.5
Ø12
4 Ø
105
Ø55
C
C
93,25
83,2 33,25 31,13
18,25
75
30 35
65
R1 R1
5
12
0 H1
0
CORTE C-CESCALA 1 : 1.5
N4
N4N4
2,5
2,95
R0,25 DETALHE DESCALA 5 : 1
7
2 H6
DETALHE EESCALA 5 : 1
1º Diedro
Escala: 1:1.5
Unidade: mm
Desenho 13
UFRJ
Data: 05/06/2018
Material: Liga Al-5454-OProf.: Fernando A. de N. C. Pinto
Distribuidor hidráulico
Pedro Ivo Meirinho Galvão
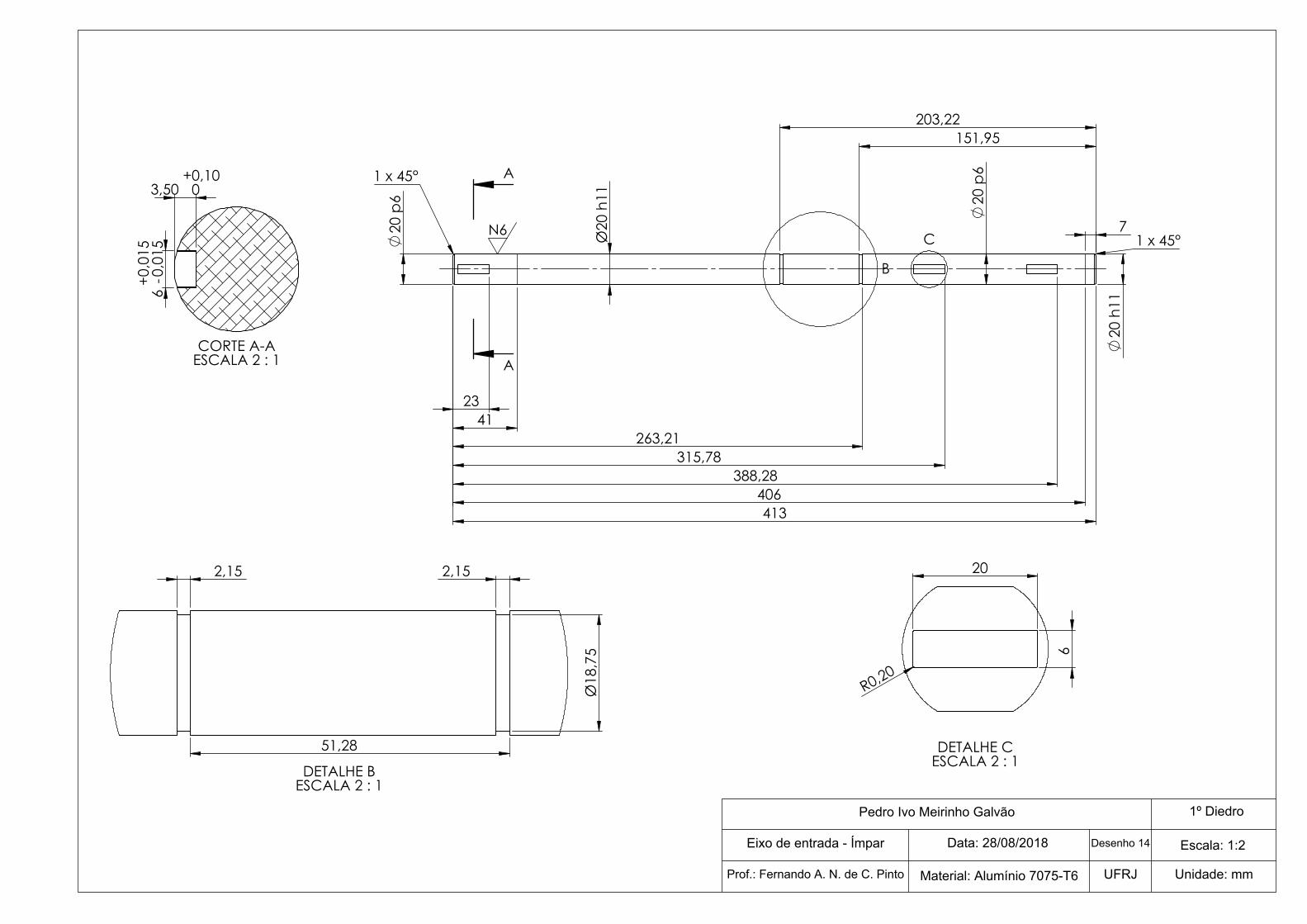
203,22 151,95
Ø20
h11
20
p6
413
388,28 315,78
263,21
23
20
h11
20
p6
7
406
41
A
A
B
C
1 x 45°
1 x 45°N6
6 + -0,
015
0,01
5
3,50 + 0,100
CORTE A-AESCALA 2 : 1
Ø18
,75
2,15 2,15
51,28
DETALHE BESCALA 2 : 1
6
20
R0,20
DETALHE CESCALA 2 : 1
1º Diedro
Escala: 1:2
Unidade: mm
Desenho 14
UFRJ
Data: 28/08/2018
Material: Alumínio 7075-T6Prof.: Fernando A. N. de C. Pinto
Eixo de entrada - Ímpar
Pedro Ivo Meirinho Galvão

28,58
174 20 249,50
AA
I
9,2
4
3,3
5
31
,60
42
H8
6,50
92,50
B
H
CORTE A-AESCALA 1 : 2
7,58 5,83 3,58
1,83
2,7
5
R0,25
DETALHE BESCALA 2 : 1
0,2
0
DETALHE HESCALA 20 : 1
20
6
DETALHE IESCALA 1 : 1
Pedro Ivo Meirinho Galvão
Data: 30/08/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 15
Unidade: mm
Escala: 1:2
1º Diedro
Eixo de entrada - Vazado
Material: Liga Al 7075-T6
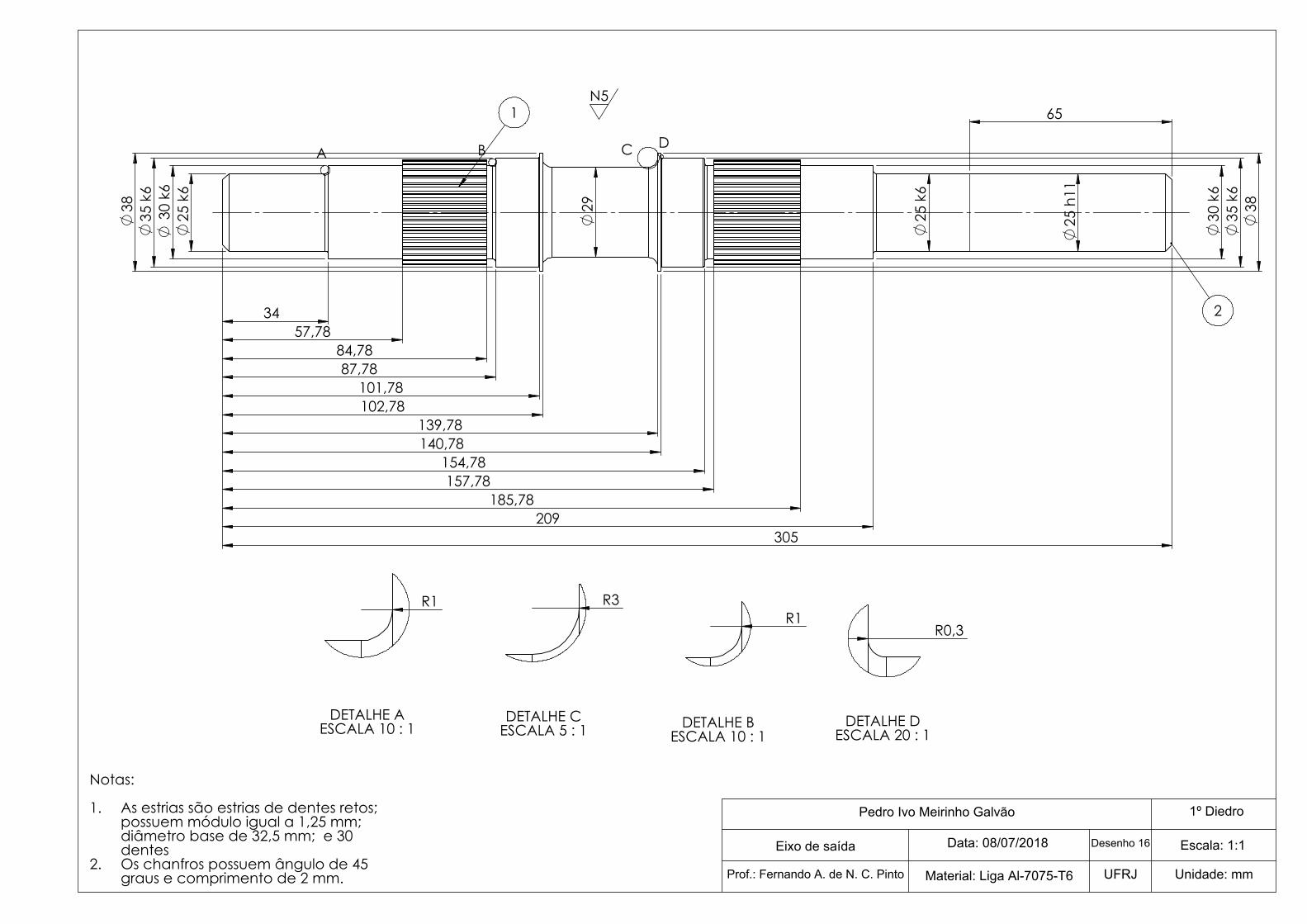
305 209
185,78 157,78
154,78 140,78
102,78 101,78
139,78
87,78 84,78
57,78 34
25
k6
30
k6
35
k6
38
29
35
k6
25
k6
3
0 k6
38
25
h11
65
A B C D
1
2
N5
R1
DETALHE AESCALA 10 : 1
R1
DETALHE BESCALA 10 : 1
R3
DETALHE CESCALA 5 : 1
R0,3
DETALHE DESCALA 20 : 1
Notas:
As estrias são estrias de dentes retos; 1.possuem módulo igual a 1,25 mm; diâmetro base de 32,5 mm; e 30 dentesOs chanfros possuem ângulo de 45 2.graus e comprimento de 2 mm.
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 16
UFRJ
Data: 08/07/2018
Material: Liga Al-7075-T6Prof.: Fernando A. de N. C. Pinto
Eixo de saída
Pedro Ivo Meirinho Galvão

Ø180
Ø118
Ø149
30°
30° 30°
A
A
12 furos
5,75
A
CORTE A-A Ø
4
Ø2
2,25 1,50
2
DETALHE AESCALA 2 : 1
Nota:1.Todos os adoçamentospossuem raio de 1mm
Pedro Ivo Meirinho Galvão
Data: 10/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 17
Unidade: mm
Escala: 1:2
1º Diedro
Fixação do colar - Ímpar
Material: Aço AISI 1020

Ø91,50
Ø70,50
30°
30°
30°
A
A
Furo M2 passanteFuro M4 cego (ambos lados)12 repetições
3
B
CORTE A-A
Ø4
Ø2
1,58 1
0,42
DETALHE BESCALA 5 : 1
Pedro Ivo Meirinho Galvão
Data: 08/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 18
Unidade: mm
Escala: 1:1
1º Diedro
Fixação do colar - Par
Material: Aço AISI 1020
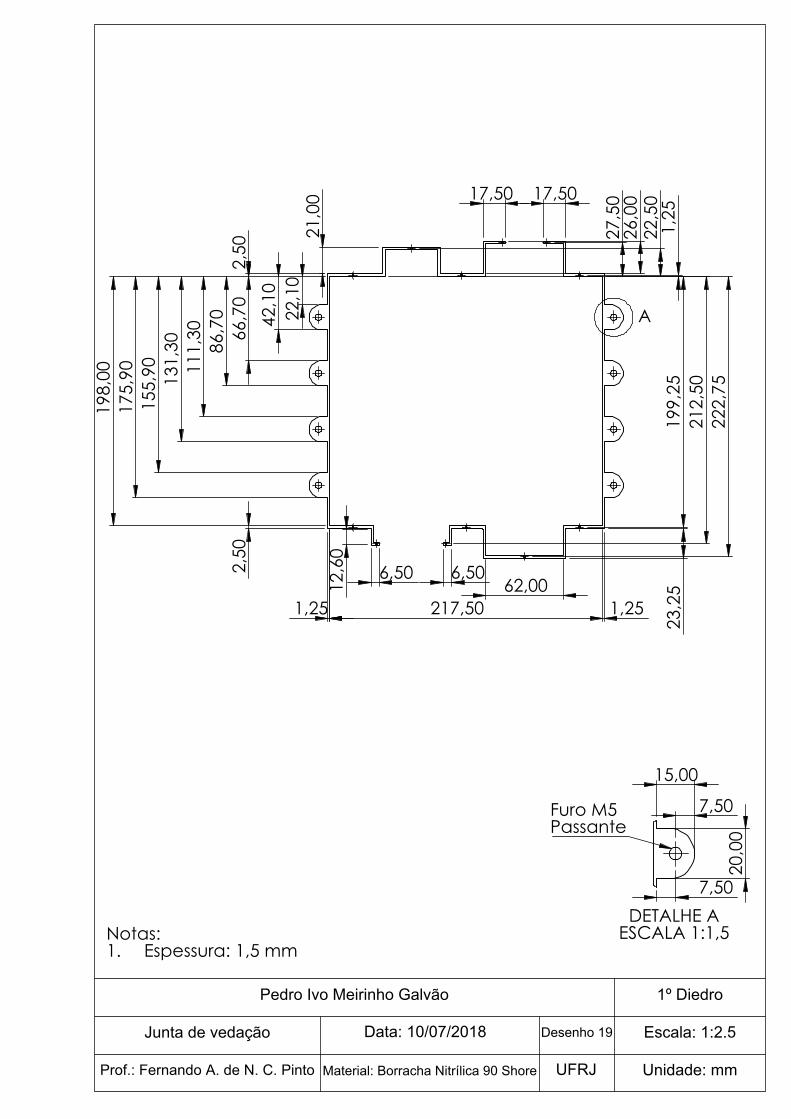
198
,00
217,50
2,5
0
1,25
2,5
0
1,25
23,
25 62,00
21,
00 17,50
12,
60
6,50
22,
10
42,
10
66,
70
86,
70
111
,30
131
,30
155
,90
175
,90
27,
50
1,2
5 2
2,50
1
99,2
5 2
12,5
0 2
22,7
5
6,50
17,50
26,
00
A
20,
00
7,50
15,00
7,50 DETALHE A
ESCALA 1:1,5
Furo M5Passante
Notas:Espessura: 1,5 mm1.
Pedro Ivo Meirinho Galvão
Data: 10/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 19
Unidade: mm
Escala: 1:2.5
1º Diedro
Junta de vedação
Material: Borracha Nitrílica 90 Shore
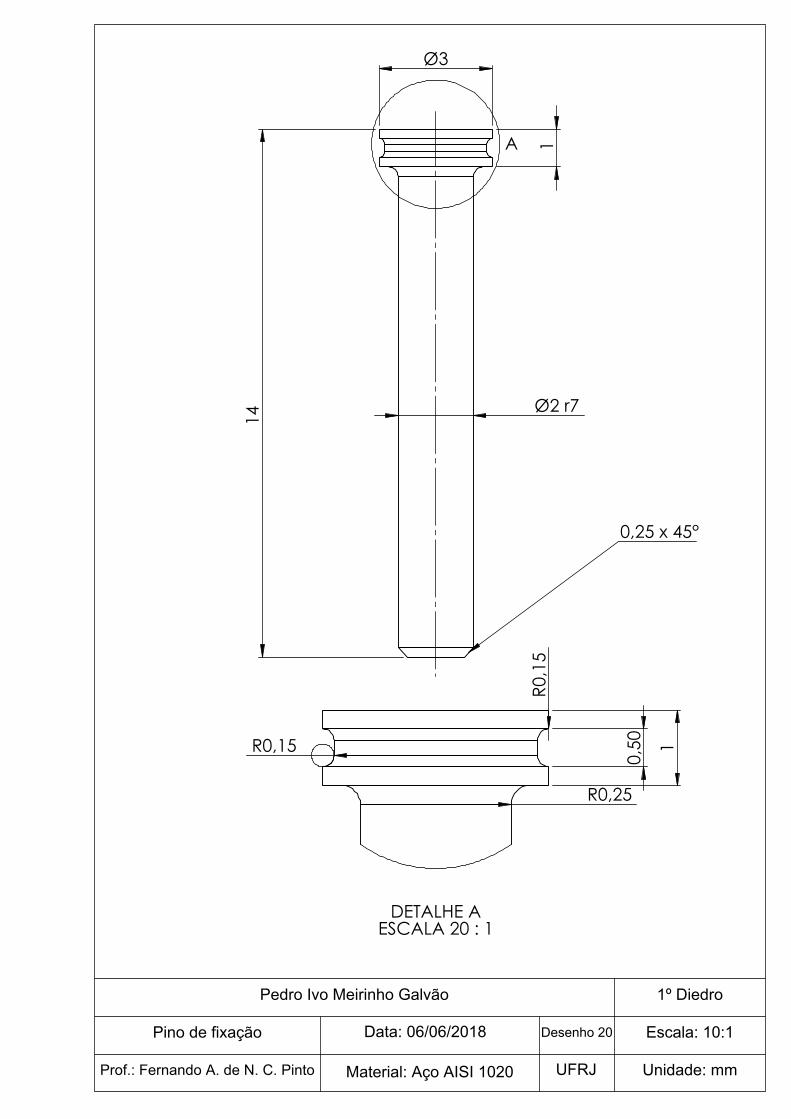
14
1
Ø3
Ø2 r7
A
0,25 x 45° R
0,15
R0,15
R0,25
0,5
0
1
DETALHE AESCALA 20 : 1
Pedro Ivo Meirinho Galvão
Data: 06/06/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 20
Unidade: mm
Escala: 10:1
1º Diedro
Pino de fixação
Material: Aço AISI 1020
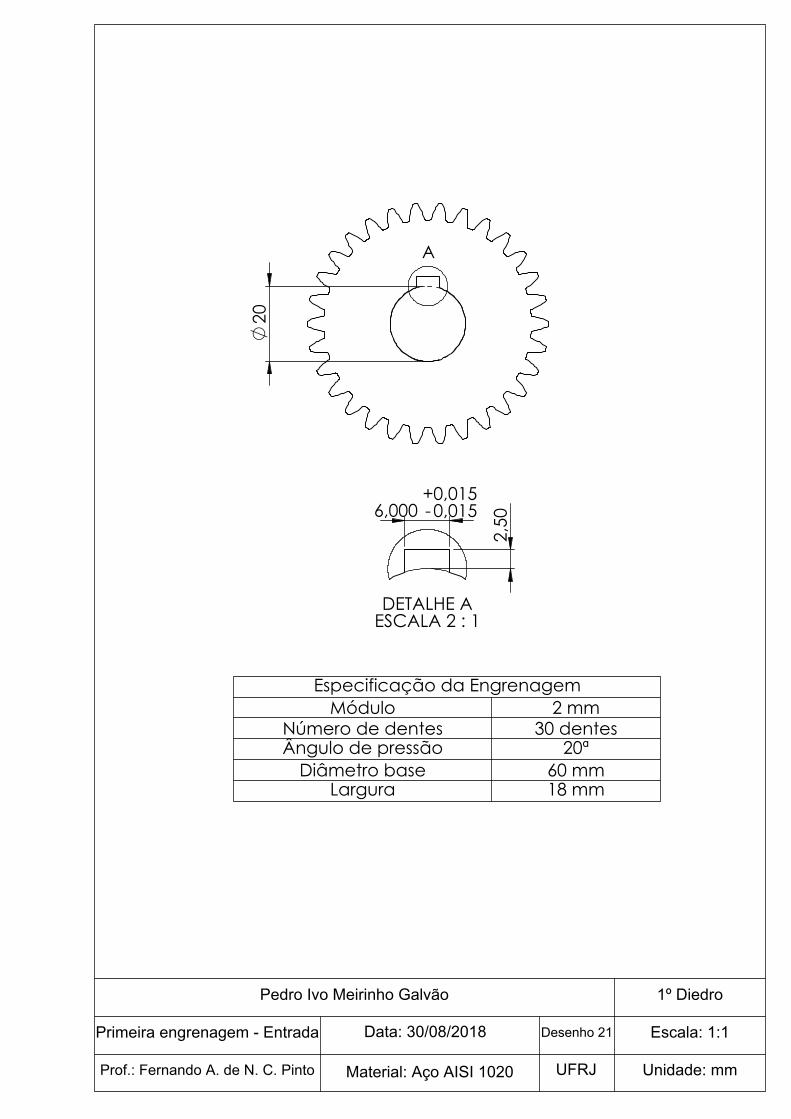
20
A
6,000 +-0,0150,015
2,5
0
DETALHE AESCALA 2 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 30 dentesÂngulo de pressão 20ª
Diâmetro base 60 mmLargura 18 mm
Pedro Ivo Meirinho Galvão
Data: 30/08/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 21
Unidade: mm
Escala: 1:1
1º Diedro
Primeira engrenagem - Entrada
Material: Aço AISI 1020
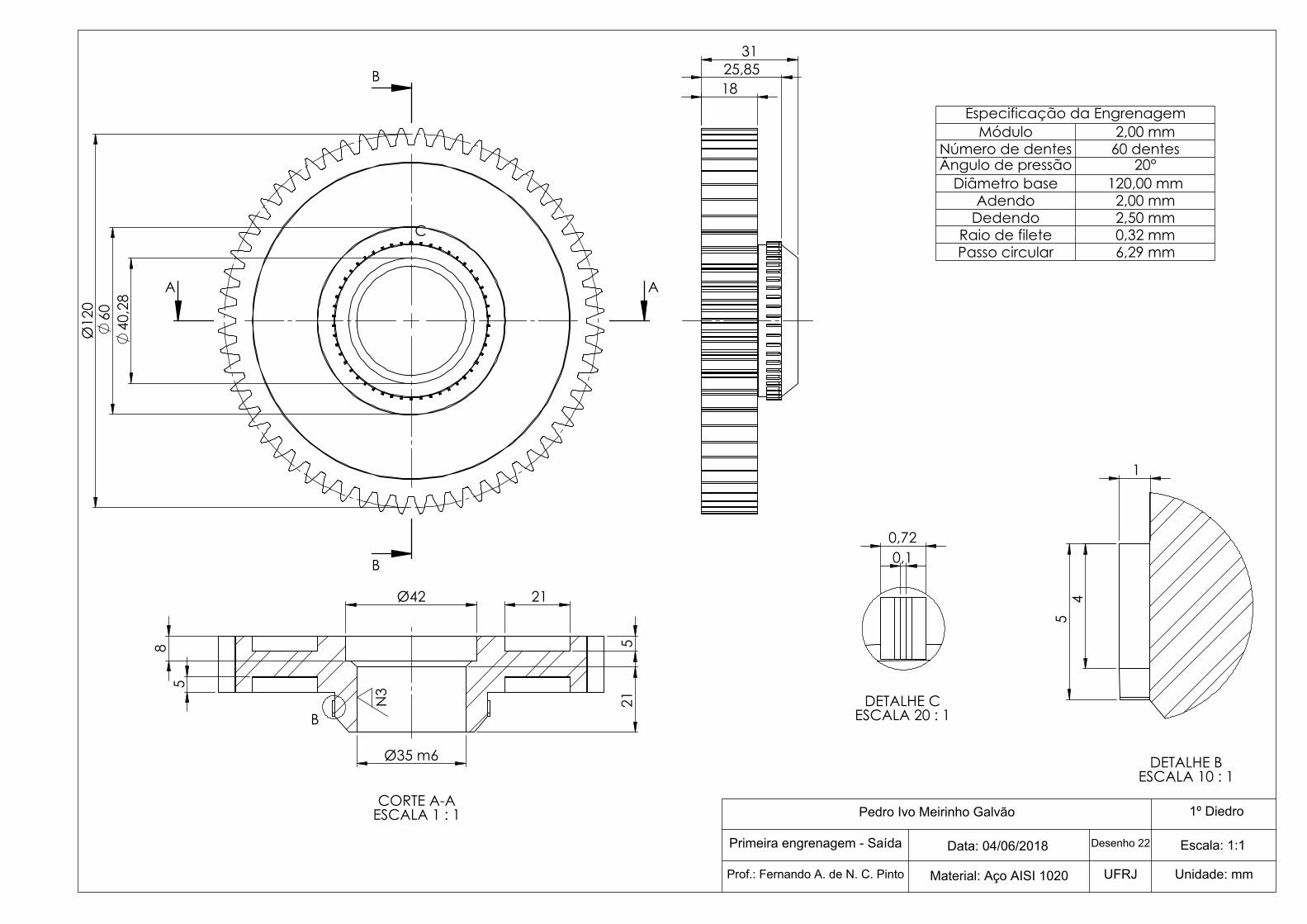
60
40,2
8
Ø12
0
AA
B
B
C
18
31 25,85
Ø42
Ø35 m6
8
21 5
5
21
B
CORTE A-AESCALA 1 : 1
N3
0,72 0,1
DETALHE CESCALA 20 : 1
1
5 4
DETALHE BESCALA 10 : 1
Especificação da EngrenagemMódulo 2,00 mm
Número de dentes 60 dentesÂngulo de pressão 20°
Diâmetro base 120,00 mmAdendo 2,00 mm
Dedendo 2,50 mmRaio de filete 0,32 mmPasso circular 6,29 mm
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 22
UFRJ
Data: 04/06/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Primeira engrenagem - Saída
Pedro Ivo Meirinho Galvão
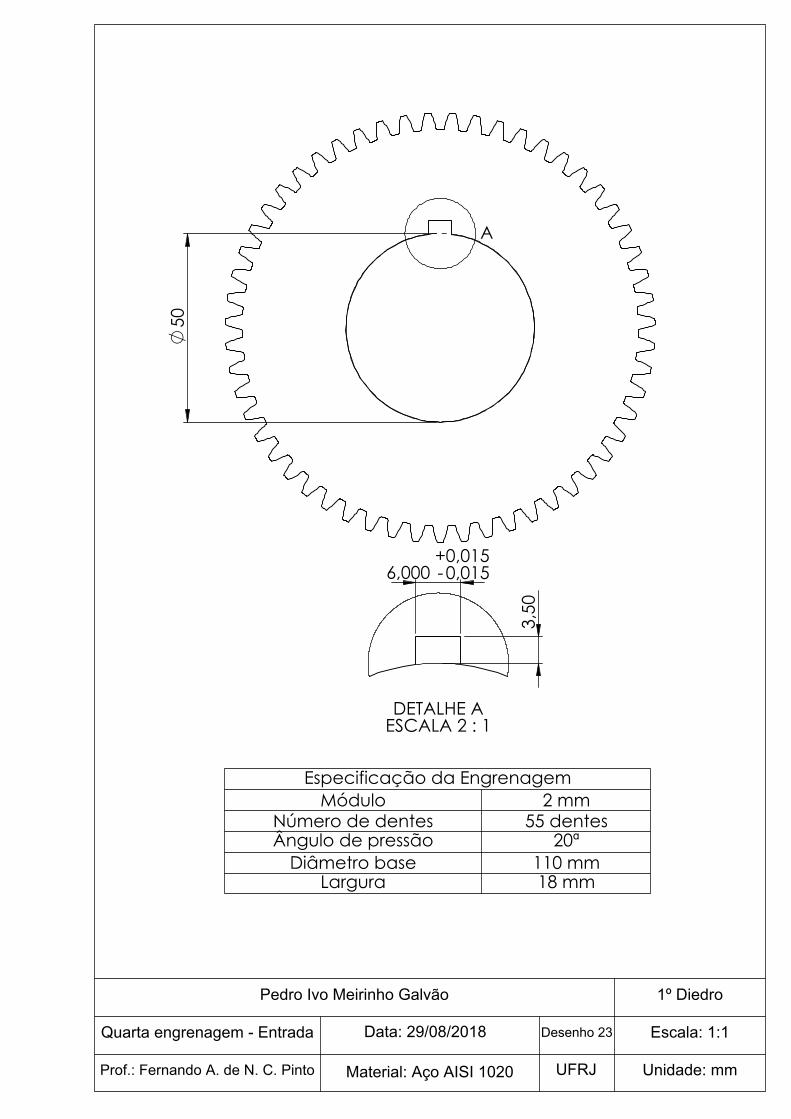
50
A
6,000 +-0,0150,015
3,5
0
DETALHE AESCALA 2 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 55 dentesÂngulo de pressão 20ª
Diâmetro base 110 mmLargura 18 mm
Pedro Ivo Meirinho Galvão
Data: 29/08/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 23
Unidade: mm
Escala: 1:1
1º Diedro
Quarta engrenagem - Entrada
Material: Aço AISI 1020
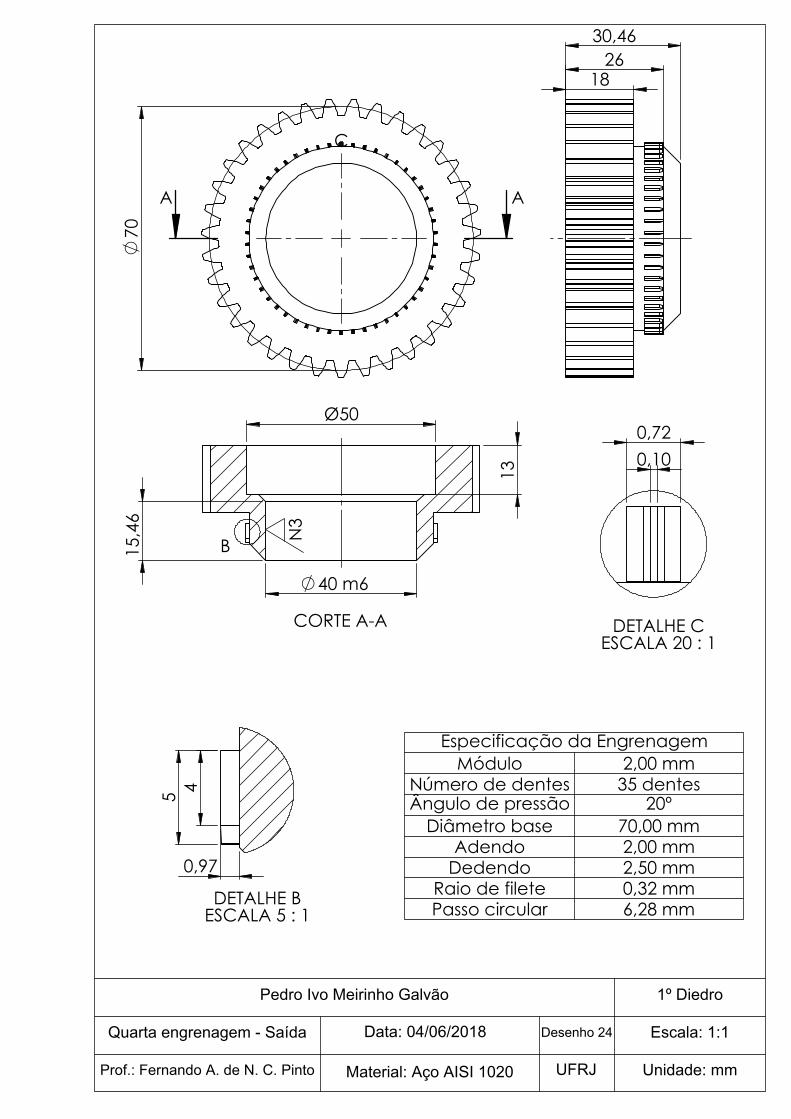
70
AA
C
18 26
30,46
Ø50
40 m6
13
15,
46
B
CORTE A-A
N3
5 4
0,97
DETALHE BESCALA 5 : 1
0,72 0,10
DETALHE CESCALA 20 : 1
Especificação da EngrenagemMódulo 2,00 mm
Número de dentes 35 dentesÂngulo de pressão 20º
Diâmetro base 70,00 mmAdendo 2,00 mm
Dedendo 2,50 mmRaio de filete 0,32 mmPasso circular 6,28 mm
Pedro Ivo Meirinho Galvão
Data: 04/06/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 24
Unidade: mm
Escala: 1:1
1º Diedro
Quarta engrenagem - Saída
Material: Aço AISI 1020

50
A
6,000 +-0,0150,015
3,5
0 DETALHE A
ESCALA 2 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 40 dentesÂngulo de pressão 20ª
Diâmetro base 80 mmLargura 18 mm
Pedro Ivo Meirinho Galvão
Data: 29/08/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 25
Unidade: mm
Escala: 1:1
1º Diedro
Segunda engrenagem - Entrada
Material: Aço AISI 1020
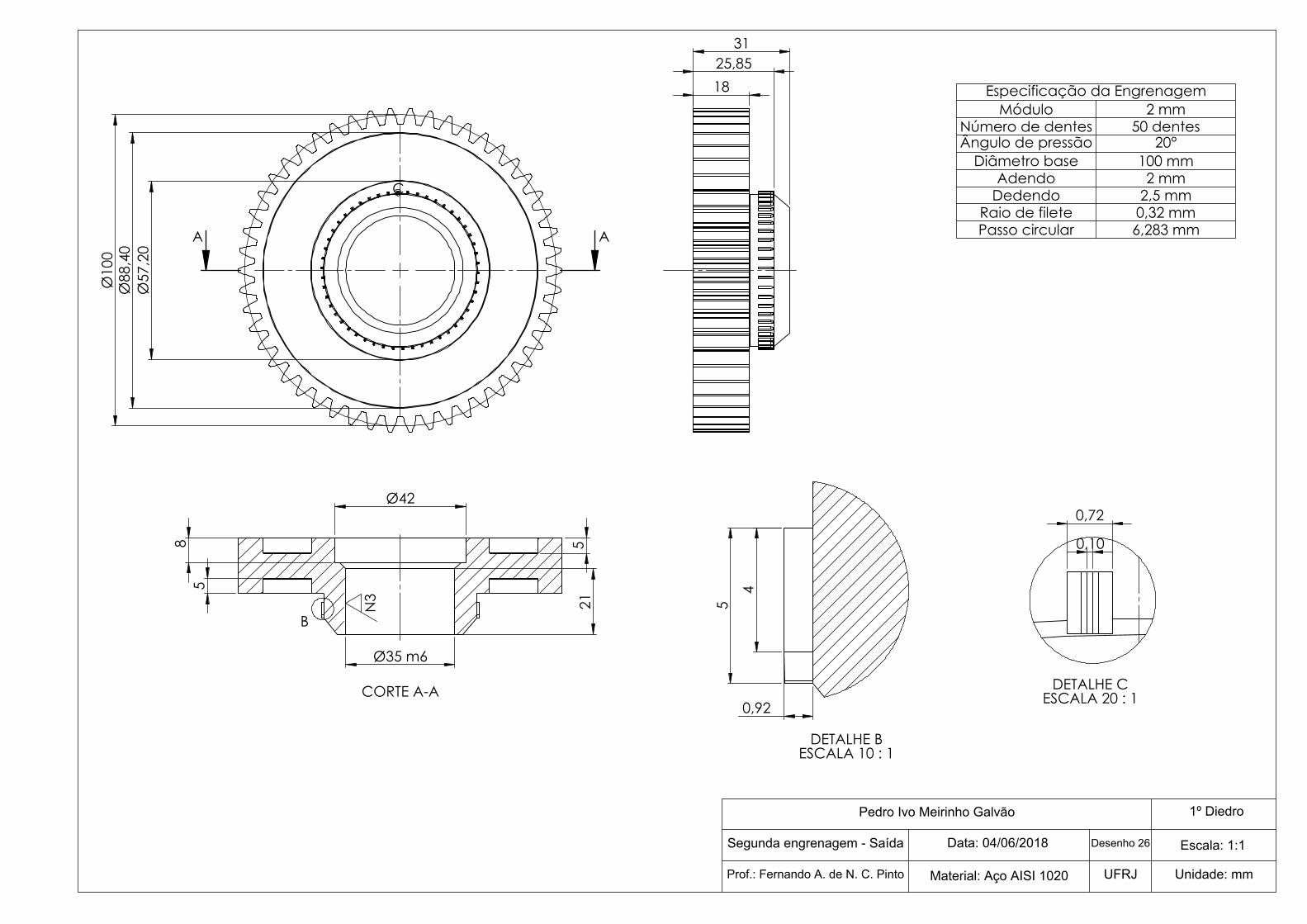
Ø88
,40
Ø57
,20
Ø10
0
AA
C
31 25,85 18
Ø42
Ø35 m6
21
8
5
5
B
CORTE A-A
N3
5 4
0,92
DETALHE BESCALA 10 : 1
0,72
0,10
DETALHE CESCALA 20 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 50 dentesÂngulo de pressão 20°
Diâmetro base 100 mmAdendo 2 mm
Dedendo 2,5 mmRaio de filete 0,32 mmPasso circular 6,283 mm
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 26
UFRJ
Data: 04/06/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Segunda engrenagem - Saída
Pedro Ivo Meirinho Galvão

Ø30
Ø20
C
84,70 24,70
BB
Ø16
4 Ø
37
Módulo: 2mmDiâmetro base: 102 mm51 dentes
20
47
37 H
7
30
20
2
60 10
24,70
CORTE B-B1
6 +-0,0150,015
2,8
0 + 0,
100
DETALHE CESCALA 5 : 1
Nota:1. Todos os chanfros possuem comprimento de 2 mm e ângulo de 45°.
1º Diedro
Escala: 1:2
Unidade: mm
Desenho 27
UFRJ
Data: 06/06/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Suporte discos - Ímpar
Pedro Ivo Meirinho Galvão
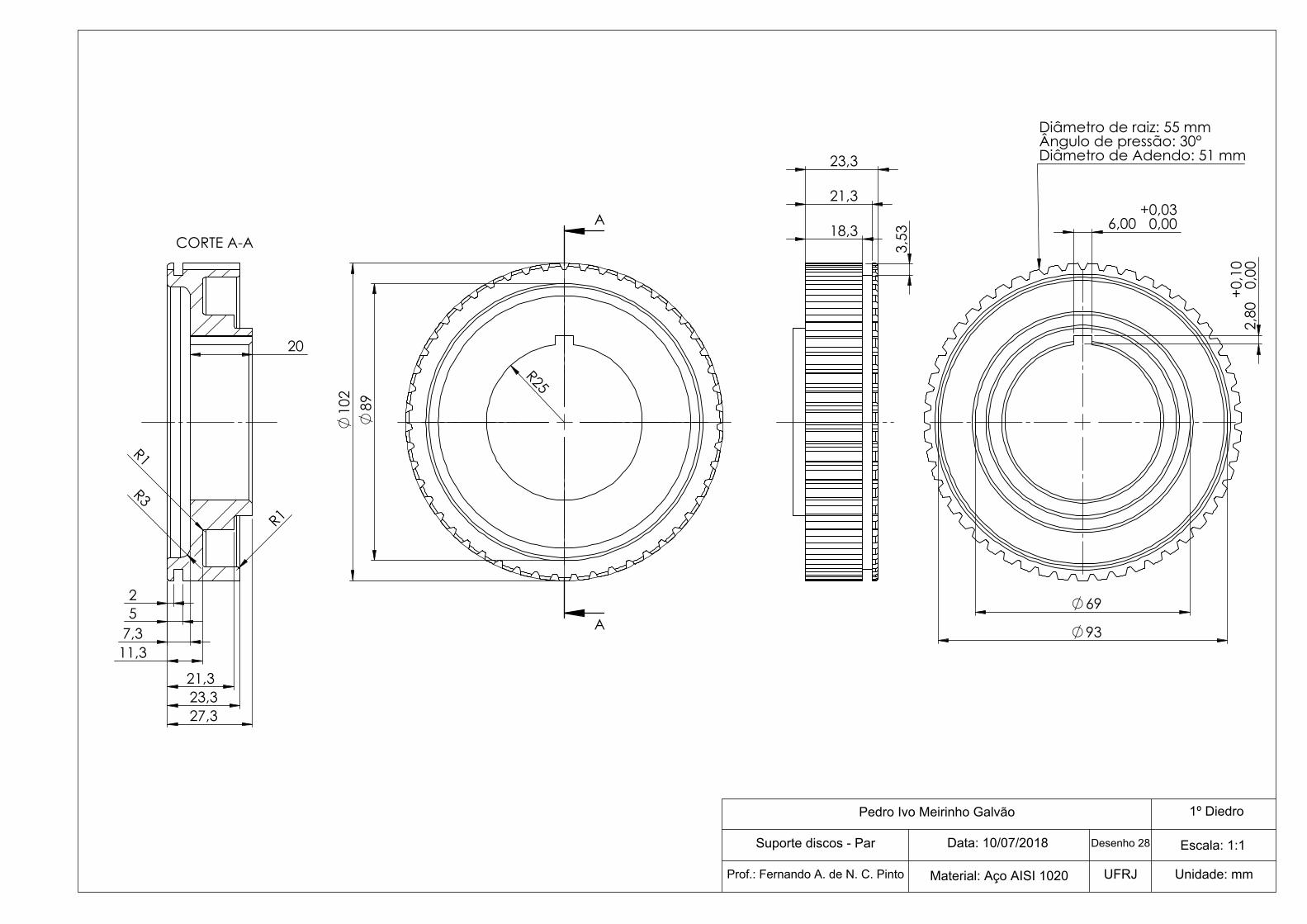
89
R25
10
2
A
A
23,3
21,3
18,3
3,5
3
93
69
6,00 + 0,030,00
2,8
0 + 0,
100,
00
Diâmetro de raiz: 55 mmÂngulo de pressão: 30°Diâmetro de Adendo: 51 mm
20
27,3 23,3 21,3
11,3
5 2
7,3
R3
R1
R1
CORTE A-A
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 28
UFRJ
Data: 10/07/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Suporte discos - Par
Pedro Ivo Meirinho Galvão
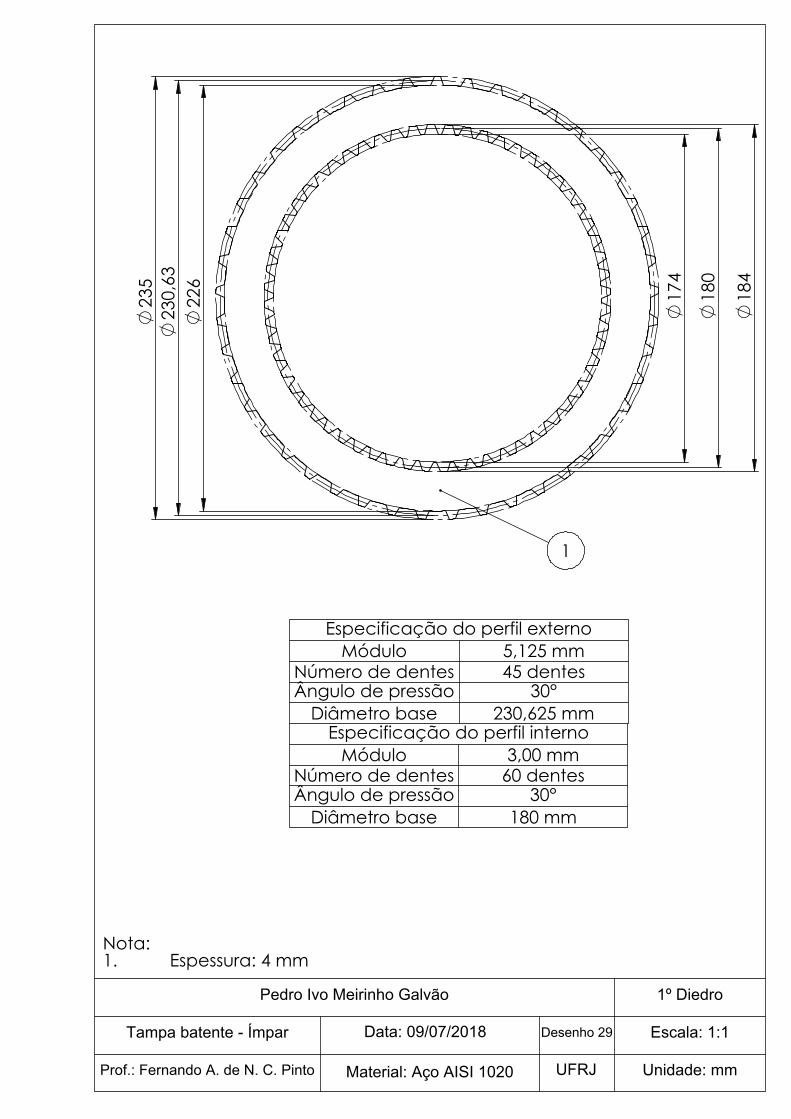
23
5
230,
63
22
6
17
4
18
0
18
4
Nota: Espessura: 4 mm1.
1
Especificação do perfil externoMódulo 5,125 mm
Número de dentes 45 dentesÂngulo de pressão 30°
Diâmetro base 230,625 mmEspecificação do perfil interno
Módulo 3,00 mmNúmero de dentes 60 dentesÂngulo de pressão 30°
Diâmetro base 180 mm
Pedro Ivo Meirinho Galvão
Data: 09/07/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 29
Unidade: mm
Escala: 1:1
1º Diedro
Tampa batente - Ímpar
Material: Aço AISI 1020
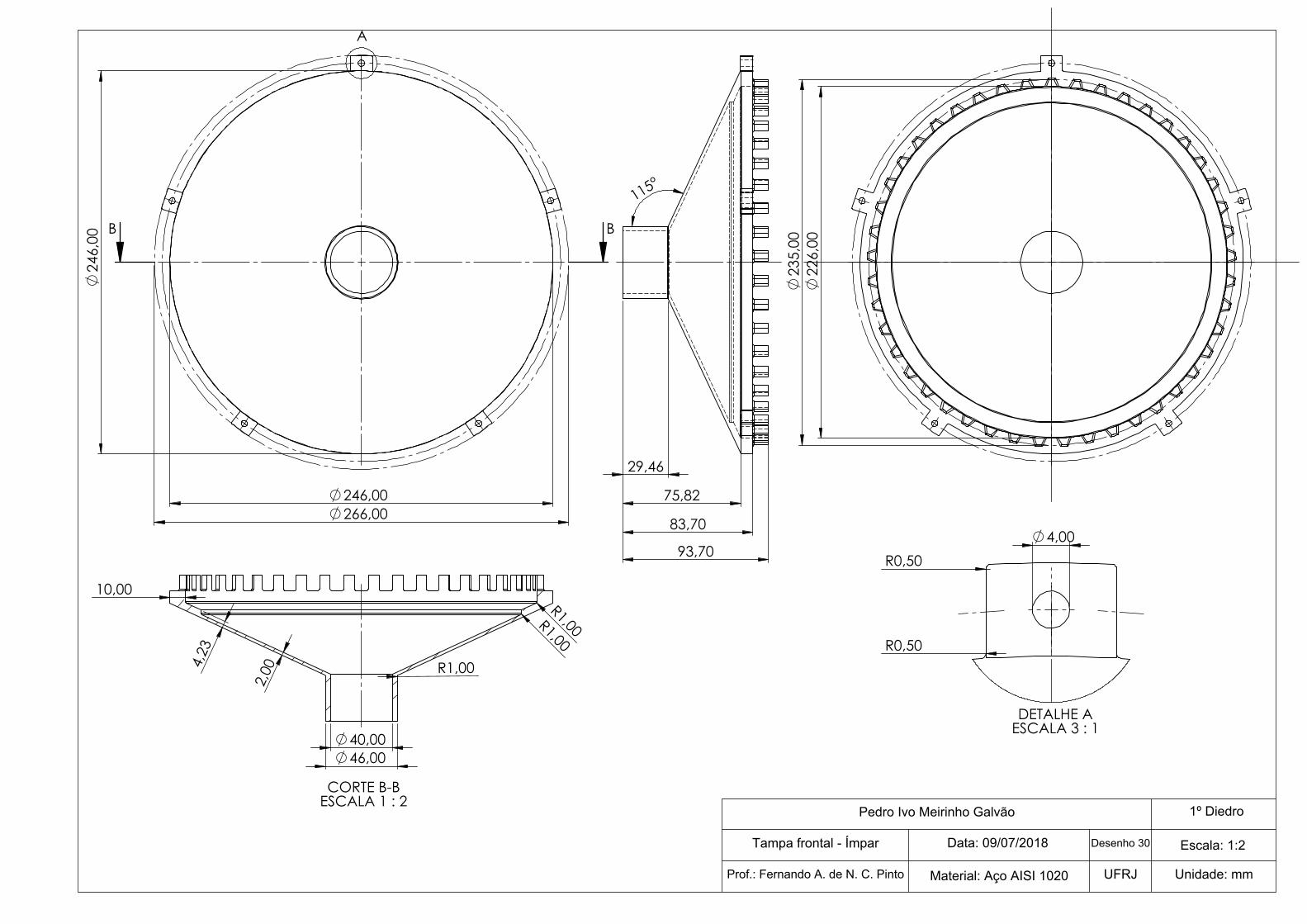
24
6,00
246,00 266,00
BB
A
83,70
75,82
29,46
93,70
115°
23
5,00
226,
00
40,00 46,00
2,0
0 R1,00
R1,00 R1,00
4,2
3
10,00
CORTE B-BESCALA 1 : 2
R0,50
R0,50 4,00
DETALHE AESCALA 3 : 1
1º Diedro
Escala: 1:2
Unidade: mm
Desenho 30
UFRJ
Data: 09/07/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Tampa frontal - Ímpar
Pedro Ivo Meirinho Galvão

Ø77
Ø
50
Ø14
4
136
15
2
AA 3
2
2
11,
50
CORTE A-ASCALE 1 : 1.5
Nota: Todos os adoçamentospossuem raio igual a 1 mm
Especificação da EngrenagemMódulo 4,00 mm
Número de dentes 36 dentesÂngulo de pressão 30°
Diâmetro base 144 mm
Pedro Ivo Meirinho Galvão
Data: 05/06/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 31
Unidade: mm
Escala: 1:1.5
1º Diedro
Tampa frontal - Par
Material: Aço AISI 1020

R113
Ø100
R123
Ø266 Ø256
A
APerfil de involuta:Módulo: 5 mmDiâmetro base: 225 mm45 dentes
Furo de fixação:Furo: M4Profundidade: 4,20 mm5 repetições igualmente espaçadas
Ø10
4
Ø24
6
Ø20
5,20
Ø
193
10
5,34
110 95
72,50
63 61
55 36,70 31,60
2 2,50
2
2,8
0
75
20
2,25
H10
65°
SECTION A-ASCALE 1 : 2
CORTE A-A
1º Diedro
Escala: 1:2
Unidade: mm
Desenho 32
UFRJ
Data: 05/06/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Tampa traseira - Ímpar
Pedro Ivo Meirinho Galvão
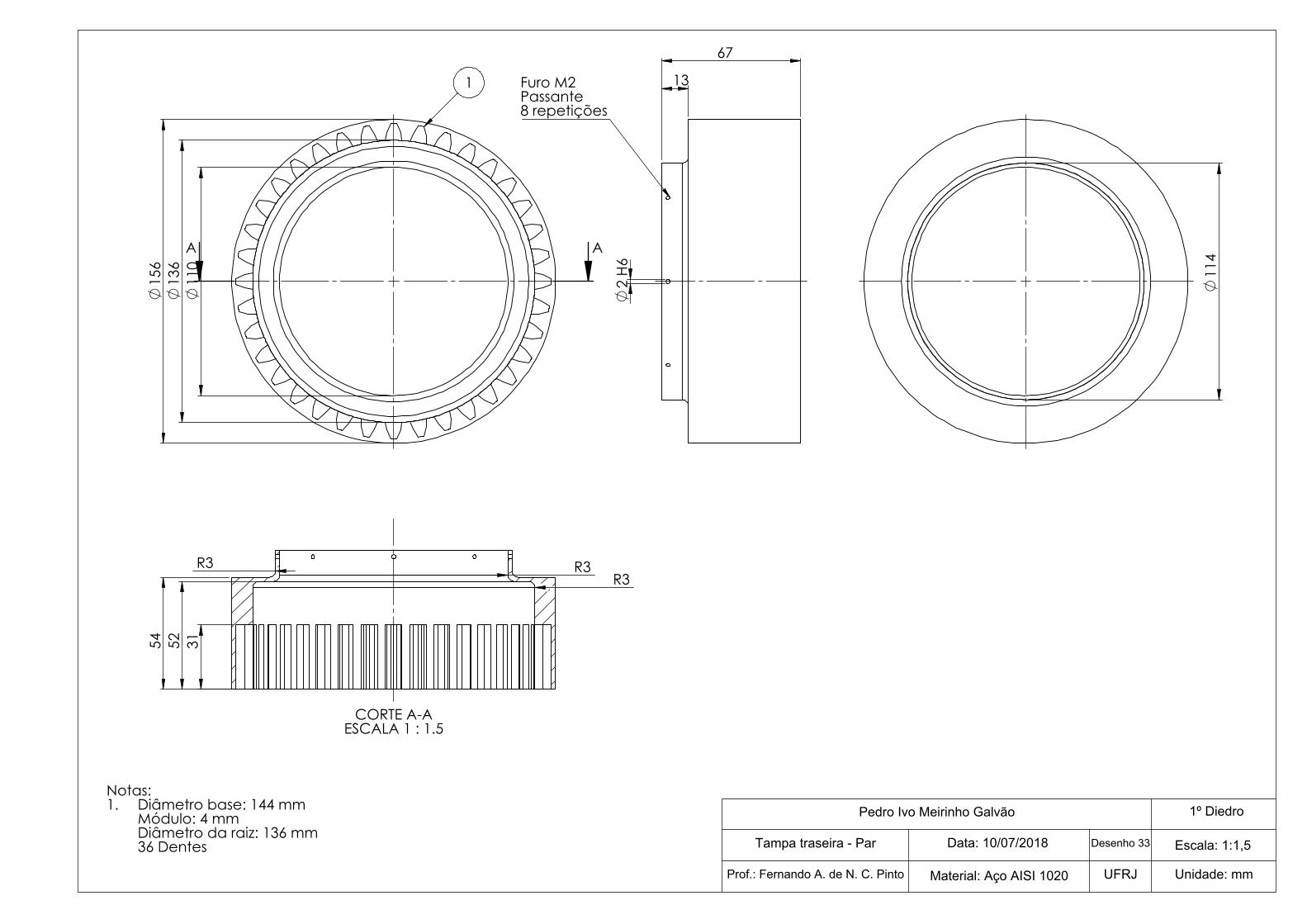
15
6
11
0
136
AA
1
67
13
2
H6
Furo M2Passante8 repetições
11
4
52
54
31
R3 R3 R3
CORTE A-AESCALA 1 : 1.5
Notas:Diâmetro base: 144 mm 1.Módulo: 4 mm Diâmetro da raiz: 136 mm36 Dentes
1º Diedro
Escala: 1:1,5
Unidade: mm
Desenho 33
UFRJ
Data: 10/07/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Tampa traseira - Par
Pedro Ivo Meirinho Galvão

20
A
6,000 +-0,0150,015
2,5
0
DETALHE AESCALA 2 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 45 dentesÂngulo de pressão 20ª
Diâmetro base 90 mmLargura 18 mm
Pedro Ivo Meirinho Galvão
Data: 27/08/2018
UFRJProf.: Fernando A. de N. C. Pinto
Desenho 34
Unidade: mm
Escala: 1:1
1º Diedro
Terceira engrenagem - Entrada
Material: Aço AISI 1020
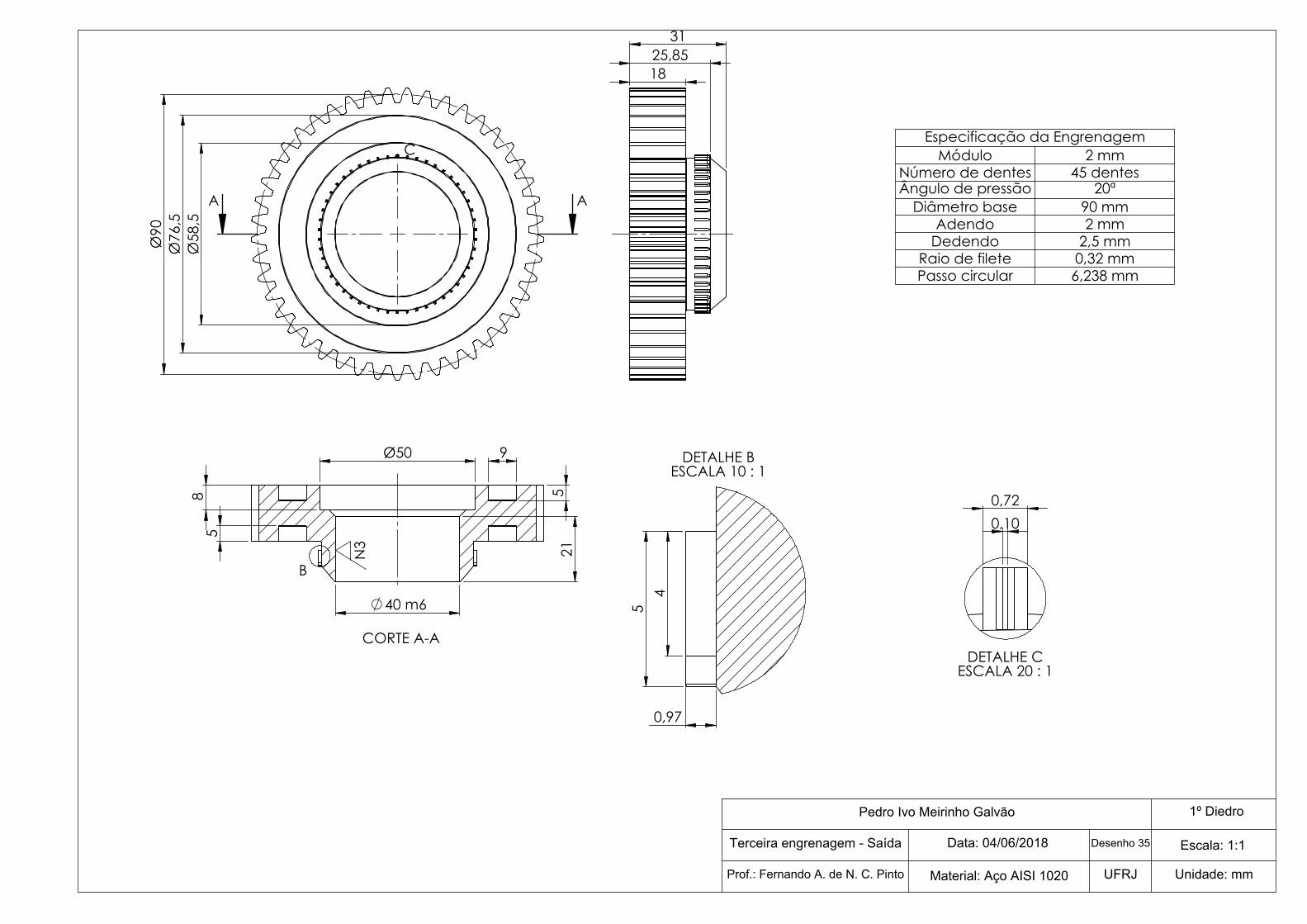
Ø76
,5
Ø58
,5
Ø90
AA
C
31 25,85 18
Ø50
5
5
21
8
40 m6
9
B
CORTE A-A
N3
5 4
0,97
DETALHE BESCALA 10 : 1
0,72 0,10
DETALHE CESCALA 20 : 1
Especificação da EngrenagemMódulo 2 mm
Número de dentes 45 dentesÂngulo de pressão 20ª
Diâmetro base 90 mmAdendo 2 mm
Dedendo 2,5 mmRaio de filete 0,32 mmPasso circular 6,238 mm
1º Diedro
Escala: 1:1
Unidade: mm
Desenho 35
UFRJ
Data: 04/06/2018
Material: Aço AISI 1020Prof.: Fernando A. de N. C. Pinto
Terceira engrenagem - Saída
Pedro Ivo Meirinho Galvão
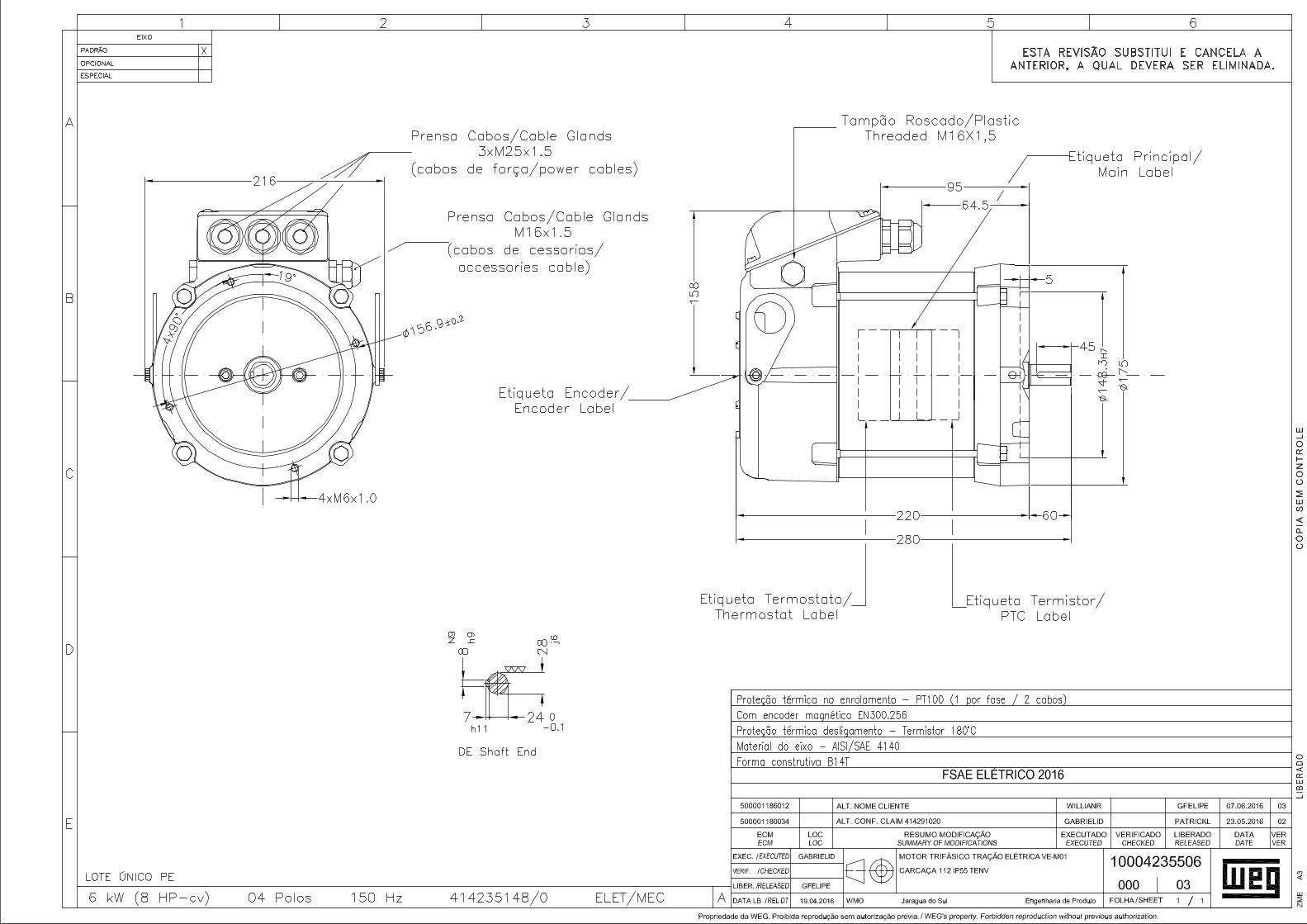
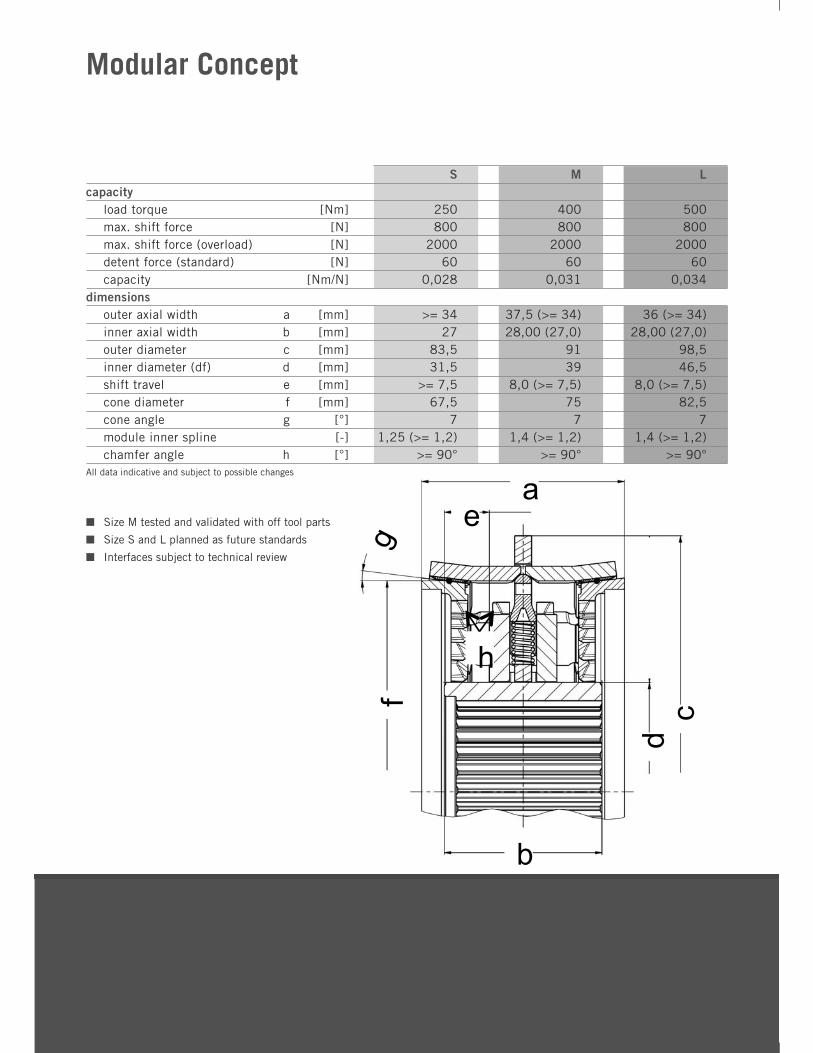
ormation
Size M tested and validated with off tool parts
Size S and L planned as future standards
Interfaces subject to technical review
Modular Concept
S M Lcapacity load torque [Nm] 250 400 500 max. shift force [N] 800 800 800 max. shift force (overload) [N] 2000 2000 2000 detent force (standard) [N] 60 60 60 capacity [Nm/N] 0,028 0,031 0,034dimensions outer axial width a [mm] >= 34 37,5 (>= 34) 36 (>= 34) inner axial width b [mm] 27 28,00 (27,0) 28,00 (27,0) outer diameter c [mm] 83,5 91 98,5 inner diameter (df) d [mm] 31,5 39 46,5 shift travel e [mm] >= 7,5 8,0 (>= 7,5) 8,0 (>= 7,5) cone diameter f [mm] 67,5 75 82,5 cone angle g [°] 7 7 7 module inner spline [-] 1,25 (>= 1,2) 1,4 (>= 1,2) 1,4 (>= 1,2) chamfer angle h [°] >= 90° >= 90° >= 90°All data indicative and subject to possible changes

LUB
RIC
ATI
NG
OIL
PU
MP
EP
20
LUB
RIC
ATIN
G G
EAR
SET
S A
ND
BEA
RIN
GS
IN T
RA
NSM
ISSI
ON
S
OP
ERA
TIN
G P
RIN
CIP
LE A
ND
MO
TOR
The
EP20
is a
low
pre
ssur
e ce
ntri
fuga
l pum
p. I
t is
dri
ven
by
a si
ngle
pha
se c
law
pol
e m
otor
tha
t op
erat
es a
ccor
ding
to
dem
and,
and
it is
con
trol
led
by in
tegr
ated
pow
er e
lect
roni
cs.
TECH
NIC
AL
DA
TA
EP2
0
COO
LIN
G O
IL P
UM
P E
P1
00
COO
LIN
G T
RA
NSM
ISSI
ON
S, W
ET C
LUTC
HES
AN
D A
UXI
LIA
RY
UN
ITS
Mot
or:
sing
le p
hase
EC
mot
or
Ope
ratin
g m
ediu
m:
ATF/
MTF
Ope
ratin
g pr
essu
re:
0.05
to
0.1
bar
Volu
met
ric fl
ow r
ate:
7 to
20
l/m
in
Dim
ensi
ons:
122
x 83
x 5
9 m
m
Com
mun
icat
ion
inte
rfac
e:LI
N
Ope
ratin
g vo
ltag
e:9
to 1
6 V
Ope
ratin
g te
mpe
ratu
re:
0 to
+14
0 °C
Perf
orm
ance
cla
ss:
20 W
Wei
ght:
344
g
Prot
ectio
n cl
ass:
IP6K
9KCh
arac
teris
tic c
urve
vol
umet
ric fl
ow r
ate/
elec
tric
cur
rent
con
sum
p-
tion
over
tem
pera
ture
, mot
or p
ump
EP20
, run
with
MTF
oil
at 1
2 V
Oil
tem
pera
ture
T [
°C]
Volumetric flow rate Q [l/min]
Electric current consumption I [A]
005101525 20
00,511,522,533,5
4,54
2580
120
150
Lub
rica
tin
g o
il p
um
p E
P2
0g
oil
pu
mp
EP2
0
FIEL
DS
OF
AP
PLI
CATI
ON
The
pum
p is
inte
nded
to
lubr
icat
e ge
ar s
ets
and
bear
ings
in
tran
smis
sion
s. P
refe
rabl
y, it
tra
nspo
rts
the
med
ium
ont
o a
high
er le
vel a
nd d
eliv
ers
it in
to a
con
tain
er in
side
the
tra
ns-
mis
sion
hou
sing
. Fr
om t
here
, th
e m
ediu
m fl
ows
thro
ugh
outl
et
open
ings
and
get
s in
to t
he g
ear
mes
hes
and
onto
the
bea
ring
poin
ts w
hich
are
thu
s lu
bric
ated
and
coo
led.
At
that
, a
spec
ial
filte
ring
of
the
med
ium
is n
ot r
equi
red.
Due
to
this
dry
-sum
p
prin
cipl
e, d
rag
loss
es a
re a
void
ed w
hich
usu
ally
ari
se in
conv
enti
onal
spl
ash
lubr
icat
ions
, an
d th
is fi
nally
lead
s to
a
redu
ced
fuel
con
sum
ptio
n.
OP
ERA
TIN
G P
RIN
CIP
LE A
ND
MO
TOR
The
EP10
0 is
an
annu
lar
gear
pum
p. I
t is
dri
ven
by a
thr
ee
phas
e EC
mot
or t
hat
oper
ates
acc
ordi
ng t
o de
man
d, a
nd it
is
cont
rolle
d by
inte
grat
ed p
ower
ele
ctro
nics
.
Coo
lin
g o
il p
um
p E
P1
00
679 810
679 810
Exem
plar
y ch
arac
teris
tic c
urve
vol
umet
ric fl
ow r
ate/
elec
tric
cur
rent
cons
umpt
ion
over
pre
ssur
e, m
otor
pum
p EP
100
with
whe
el s
et
1.7
cm³/
r, ru
n w
ith M
TF o
il at
12
V an
d 80
°C
Syst
em p
ress
ure
p [b
ar]
0012345
012345
0,5
11,5
22,5
33,5
Volumetric flow rate Q [l/min]
Electric current consumption I [A]
FIEL
DS
OF
AP
PLI
CATI
ON
The
pum
p is
inte
nded
to
lubr
icat
e an
d co
ol g
ear
mes
hes,
bea
r-
ing
poin
ts a
nd w
et c
lutc
hes
in t
rans
mis
sion
s. M
ount
ed in
side
or o
utsi
de t
he t
rans
mis
sion
, it
can
als
o co
ol a
uxili
ary
unit
s
whi
ch s
it in
side
or
outs
ide
the
tran
smis
sion
and
whi
ch m
ay
serv
e th
e m
ost
dive
rse
purp
oses
.
TECH
NIC
AL
DA
TA
EP1
00
Mot
or:
thre
e ph
ase
EC m
otor
Ope
ratin
g m
ediu
m:
ATF/
MTF
Ope
ratin
g te
mpe
ratu
re
at v
olum
etric
flow
rat
e*:
1 ba
r @
13
l/m
in t
o 3
bar
@ 8
l/m
in
Dim
ensi
ons:
130
x 90
x 8
5 m
m
Com
mun
icat
ion
inte
rfac
e:LI
N, P
WM
, CA
N
Ope
ratin
g vo
ltag
e:9
to 1
6 V
Ope
ratin
g te
mpe
ratu
re:
−30
to +
140
°C
Perf
orm
ance
cla
ss:
100
W
Wei
ght:
750
g
Prot
ectio
n cl
ass:
IP6K
9K
Prot
ectio
n cl
ass:
IP6K
9K
* de
pend
ing
on t
he p
ump
mod
ule

US1881 Hall Latch – High Sensitivity
REVISION 017 – JAN 17, 2018
3901001881
Features and Benefits Wide operating voltage range from 3.5V to 24V
High magnetic sensitivity – Multi-purpose
CMOS technology
Chopper-stabilized amplifier stage
Low current consumption
Open drain output
Thin SOT23 3L and flat TO-92 3L both RoHS Compliant packages
Applications Automotive, Consumer and Industrial
Solid-state switch
Brushless DC motor commutation
Speed detection
Linear position detection
Angular position detection
Proximity detection
Ordering information Part No. Temperature Code Package Code
US1881ESE-AAA-000 E (-40°C to 85°C) SE (TSOT-3L) US1881EUA-AAA-000 E (-40°C to 85°C) UA (TO-92) US1881KSE-AAA-000 K (-40°C to 125°C) SE (TSOT-3L) US1881KUA-AAA-000 K (-40°C to 125°C) UA (TO-92) US1881LSE-AAA-000 L (-40°C to 150°C) SE (TSOT-3L) US1881LUA-AAA-000 L (-40°C to 150°C) UA (TO-92)
Functional Diagram 1.
General Description 2.
The Melexis US1881 is a Hall-effect latch designed in mixed signal CMOS technology.
The device integrates a voltage regulator, Hall sensor with dynamic offset cancellation system, Schmitt trigger and an open-drain output driver, all in a single package.
Thanks to its wide operating voltage range and extended choice of temperature range, it is quite suitable for use in automotive, industrial and consumer applications.
The device is delivered in a Thin Small Outline Transistor (TSOT) for surface mount process and in a Plastic Single In Line (TO-92 flat) for through-hole mount.
Both 3-lead packages are RoHS compliant.
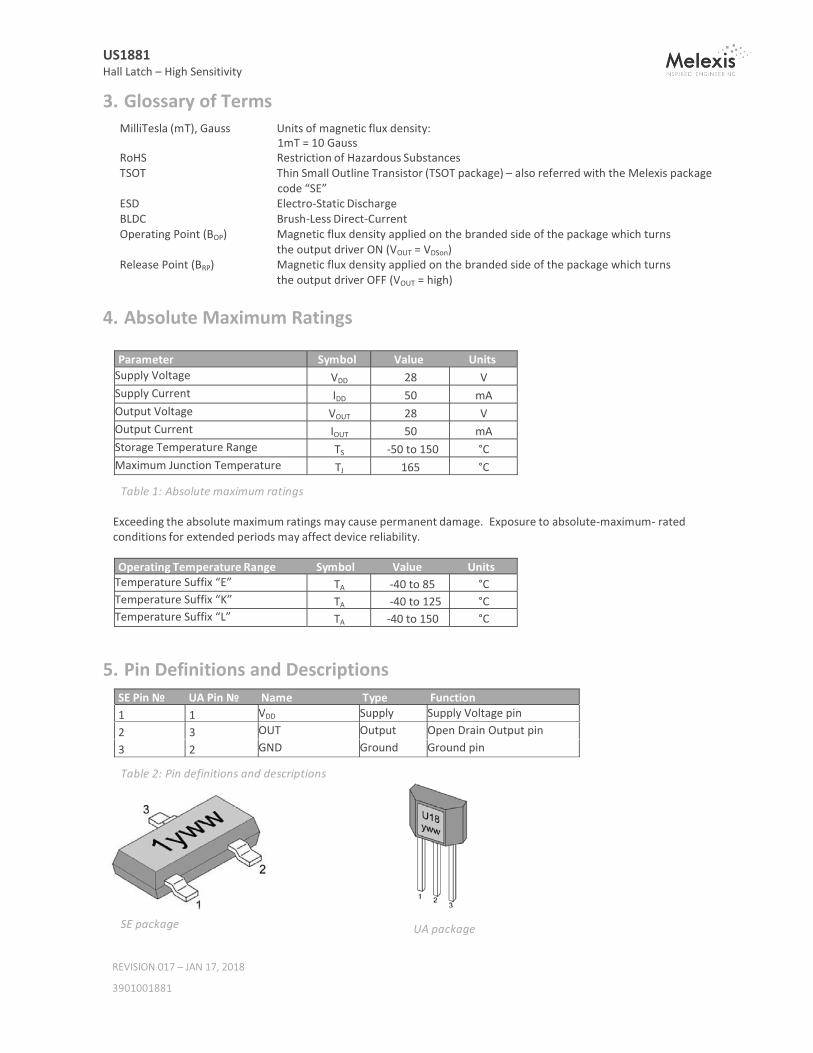
US1881 Hall Latch – High Sensitivity
REVISION 017 – JAN 17, 2018
3901001881
Glossary of Terms 3.MilliTesla (mT), Gauss Units of magnetic flux density:
1mT = 10 Gauss RoHS Restriction of Hazardous Substances TSOT Thin Small Outline Transistor (TSOT package) – also referred with the Melexis package
code “SE” ESD Electro-Static Discharge BLDC Brush-Less Direct-Current Operating Point (BOP) Magnetic flux density applied on the branded side of the package which turns the output driver ON (VOUT = VDSon) Release Point (BRP) Magnetic flux density applied on the branded side of the package which turns the output driver OFF (VOUT = high)
Absolute Maximum Ratings 4.
Parameter Symbol Value Units Supply Voltage VDD 28 V Supply Current IDD 50 mA Output Voltage VOUT 28 V Output Current IOUT 50 mA Storage Temperature Range TS -50 to 150 °C Maximum Junction Temperature TJ 165 °C
Table 1: Absolute maximum ratings
Exceeding the absolute maximum ratings may cause permanent damage. Exposure to absolute-maximum- rated conditions for extended periods may affect device reliability.
Operating Temperature Range Symbol Value Units Temperature Suffix “E” TA -40 to 85 °C Temperature Suffix “K” TA -40 to 125 °C Temperature Suffix “L” TA -40 to 150 °C
Pin Definitions and Descriptions 5.SE Pin № UA Pin № Name Type Function 1 1 VDD Supply Supply Voltage pin 2 3 OUT Output Open Drain Output pin 3 2 GND Ground Ground pin
Table 2: Pin definitions and descriptions
SE package UA package

US1881 Hall Latch – High Sensitivity
REVISION 017 – JAN 17, 2018
3901001881
General Electrical Specifications 6.DC Operating Parameters TA = 25oC, VDD = 3.5V to 24V (unless otherwise specified) Parameter Symbol Test Conditions Min Typ Max Units
Supply Voltage VDD Operating 3.5 24 V Supply Current IDD B < BRP 5 mA Output Saturation Voltage VDSon IOUT = 20mA, B > BOP 0.5 V Output Leakage Current IOFF B < BRP, VOUT = 24V 0.3 10 μA Output Rise Time tr RL = 1kΩ, CL = 20pF 0.25 μs Output Fall Time tf RL = 1kΩ, CL = 20pF 0.25 μs Maximum Switching Frequency FSW 10 kHz Package Thermal Resistance RTH Single layer (1S) Jedec board 301 °C/W
Table 3: Electrical specifications
Magnetic Specifications 7.DC Operating Parameters VDD = 3.5V to 24V (unless otherwise specified) Parameter Symbol Test Conditions Min Typ Max Units
Operating Point BOP TA = 85°C, E spec.
0.5 9.5 mT Release Point BRP -9.5 -0.5 mT Hysteresis BHYST 7 12 mT Operating Point BOP
TA = 125°C, K spec. 0.5 9.5 mT
Release Point BRP -9.5 -0.5 mT Hysteresis BHYST 7 12 mT Operating Point BOP
TA = 150°C, L spec. 0.5 9.5 mT
Release Point BRP -9.5 -0.5 mT Hysteresis BHYST 6 12.5 mT
Table 4: Magnetic specifications Note: For typical values, please refer to the performance graphs in section 11
Output Behaviour versus Magnetic Pole 8.DC Operating Parameters TA = -40 ᵒC to 150 ᵒC, VDD = 3.5V to 24V (unless otherwise specified) Parameter Test Conditions (SE) OUT (SE) Test Conditions (UA) OUT (UA) South pole B < BRP High B > BOP Low North pole B > BOP Low B < BRP High
Table 5: Output behaviour versus magnetic pole

US1881 Hall Latch – High Sensitivity
REVISION 017 – JAN 17, 2018
3901001881
UUA Package (TO-92 flat) 17.2.
Notes: 1. Mold flashes and protrusion are not included. 2. Gate burrs shall not exceed 0.127um on the top side.
This table in mm
A D E F J L L1 S b1 b2 c e e1 min 2.80 3.90 1.40 0.00 2.51 14.0 1.55 0.63 0.35 0.43 0.35 2.51 1.24 max 3.20 4.30 1.60 0.20 2.72 15.0 1.75 0.84 0.44 0.52 0.44 2.57 1.30 min 5°
MAX 5° REF
45° REF
3° REF max
2.21.8
1.21.6
0.3950.455

139
Installation Recommendation
L
S
rmax. 0.3d ND
1
ORDERING EXAMPLE (METRIC)
®
Rod Diameter: NGroove Diameter:
Groove Width:
TSS Part No.:
MATERIAL
®
Material Code
TSS Series No.
TSS Article No. Z20
Rod Diameter x 10
RU90
Quality Index (Standard)
-
Type (Standard)
0 0200
Table 45: Preferred Series / TSS Article No.
Rod Diameter
Groove Diameter
Groove Width TSS Part No.
dN
D1 L
*8.0 16.0 6.3 RU9000080
*16.0 24.0 6.3 RU9000160
*18.0 26.0 6.3 RU9000180
20
*22.0 32.0 8.0 RU9100220
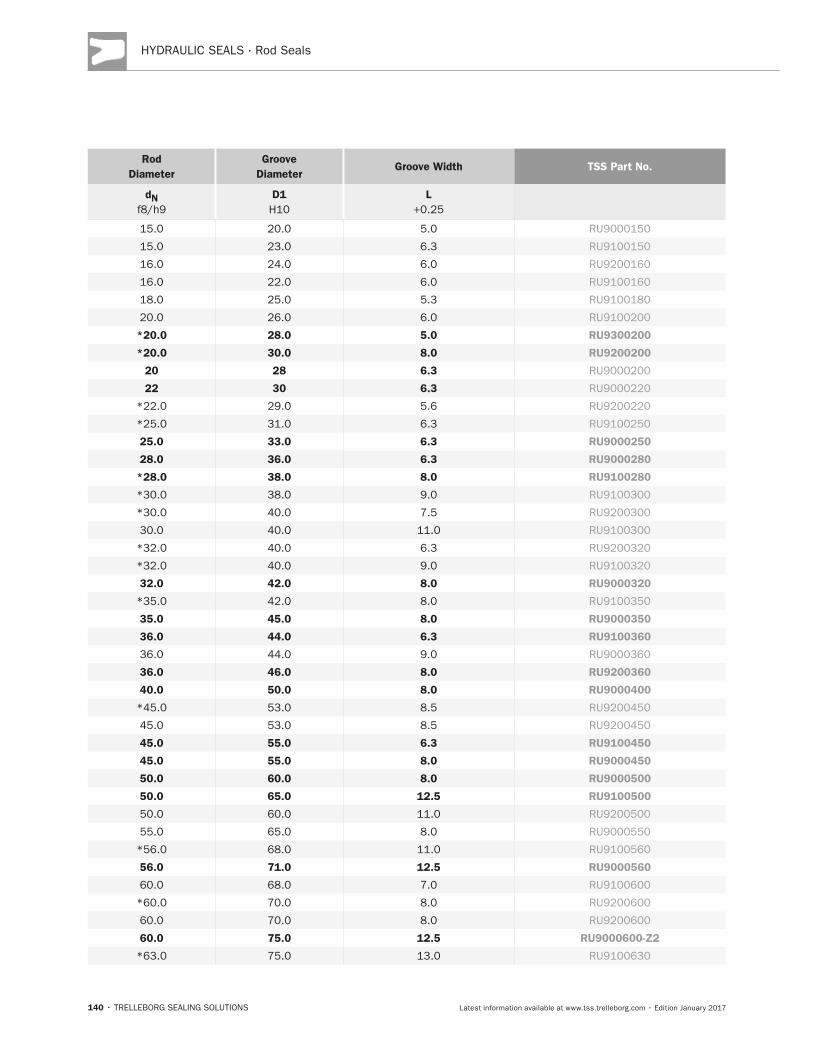
140
Rod Diameter
Groove Diameter
Groove Width TSS Part No.
dN
D1 L
*20.0 28.0 5.0 RU9300200
*20.0 30.0 8.0 RU9200200
20 28 6.3
22 30 6.3
25.0 33.0 6.3 RU9000250
28.0 36.0 6.3 RU9000280
*28.0 38.0 8.0 RU9100280
32.0 42.0 8.0 RU9000320
35.0 45.0 8.0 RU9000350
36.0 44.0 6.3 RU9100360
36.0 46.0 8.0 RU9200360
40.0 50.0 8.0 RU9000400
45.0 55.0 6.3 RU9100450
45.0 55.0 8.0 RU9000450
50.0 60.0 8.0 RU9000500
50.0 65.0 12.5 RU9100500
56.0 71.0 12.5 RU9000560
60.0 75.0 12.5 RU9000600-Z2

141
Rod Diameter
Groove Diameter
Groove Width TSS Part No.
dN
D1 L
63.0 78.0 12.5 RU9000630
70.0 85.0 12.5 RU9000700
80.0 95.0 12.5 RU9100800
90.0 105.0 12.5 RU9000900
100.0 120.0 16.0 RU9001000
110.0 130.0 16.0 RU9001100
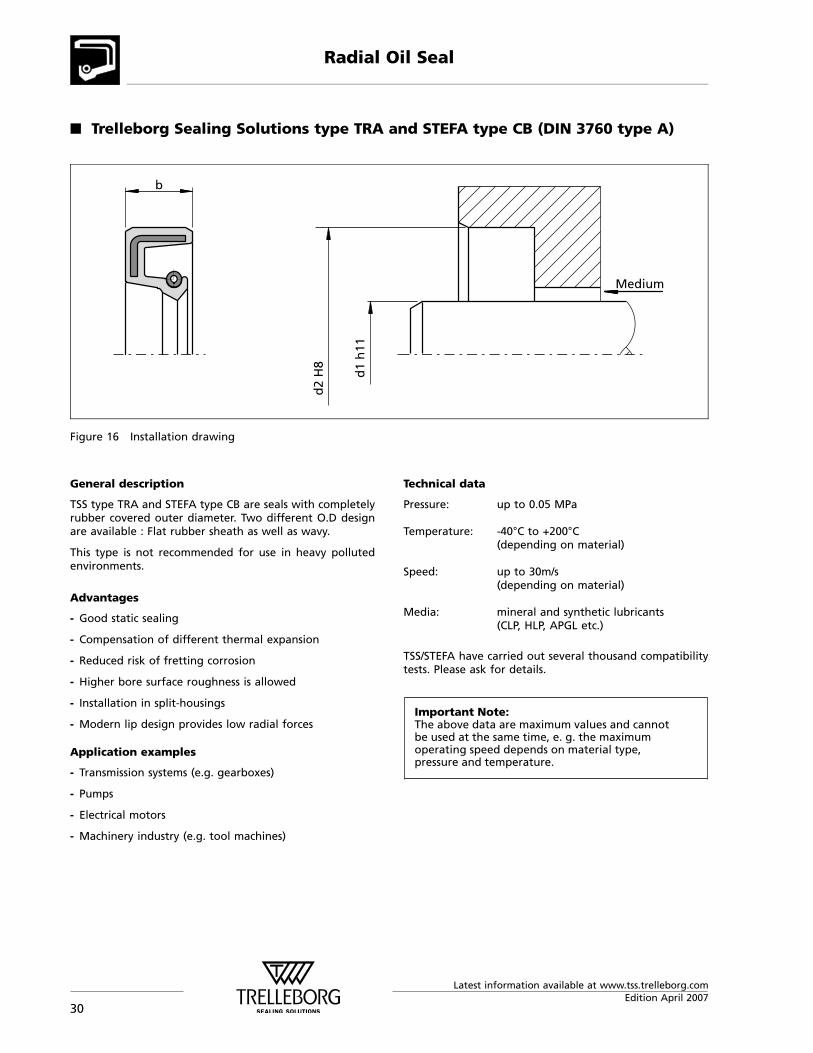
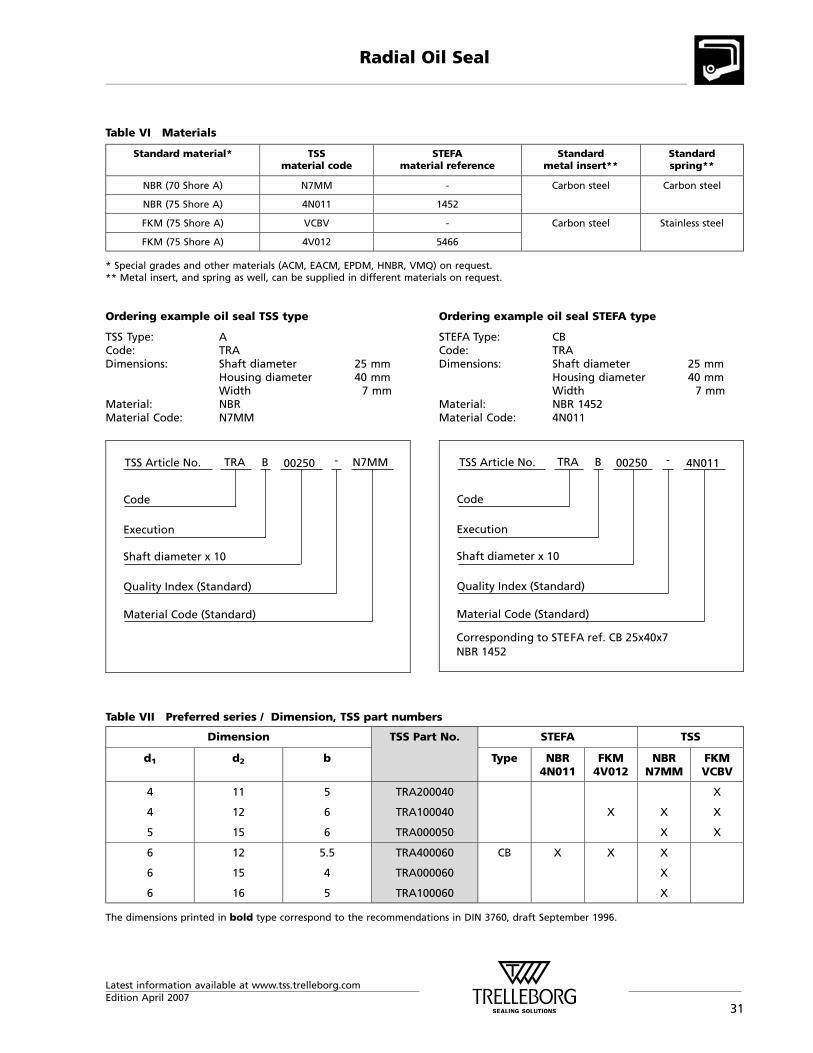
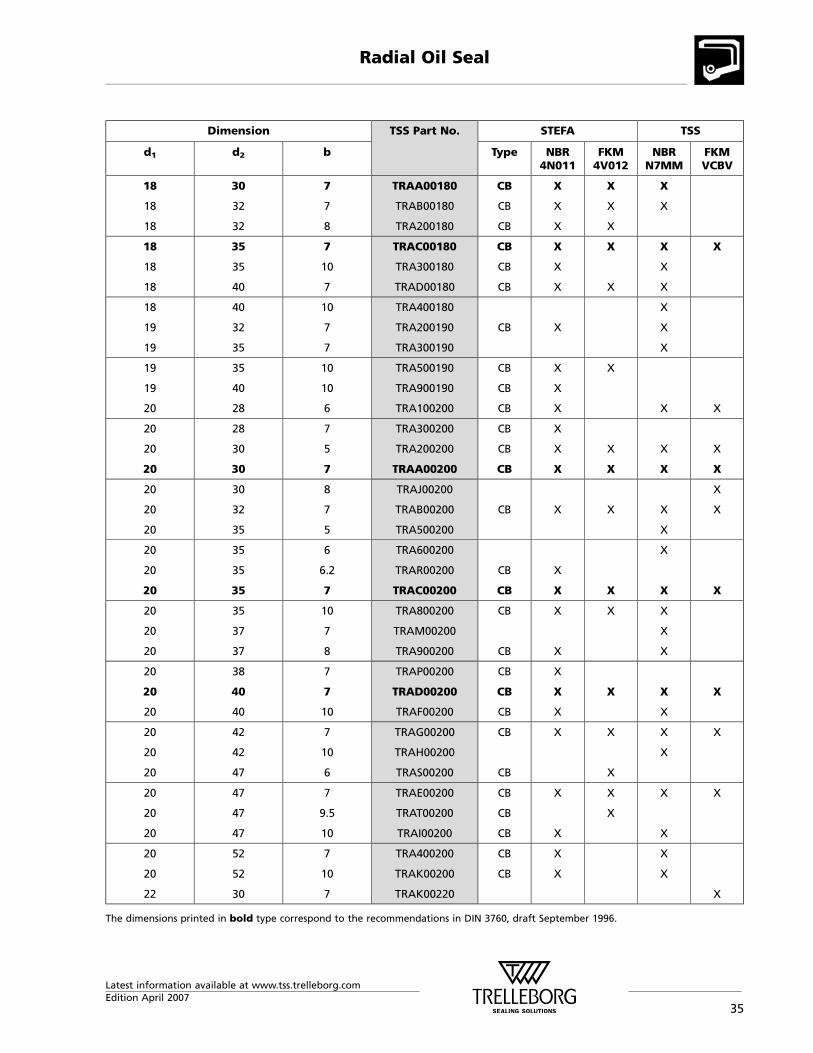



B 10
ROLAMENTOS FIXOS DE UMA CARREIRA DE ESFERAS
Diâmetro do Furo 25 – 45 mm
Notas (1) As tolerâncias das dimensões da ranhura e do anel de retenção são indicadas nas páginas de A50 a A53. (2) Quando da aplicação de uma grande carga axial, aumentar da e diminuir Da em relação aos valores indicados.
BlindadoZZ
Vedação semContato
VV
Vedação comContato
DD - DDU
Com Ranhura para Anel de Retenção
N
Com Anelde Retenção
NR
Aberto
2
25 37 7 0,3 4 500 3 150 455 320 16,1 18 000 10 000 22 000 6805 ZZ VV DD 42 9 0,3 7 050 4 550 715 460 15,4 16 000 10 000 19 000 6905 ZZ VV DDU 47 8 0,3 8 850 5 600 905 570 15,1 15 000 — 18 000 16005 — — — 47 12 0,6 10 100 5 850 1 030 595 14,5 15 000 9 500 18 000 6005 ZZ VV DDU 52 15 1 14 000 7 850 1 430 800 13,9 13 000 9 000 15 000 6205 ZZ VV DDU 62 17 1 ,1 20 600 11 200 2 100 1 150 13,2 11 000 8 000 13 000 6305 ZZ VV DDU
28 52 12 0,6 12 500 7 400 1 270 755 14,5 14 000 8 500 16 000 60/28 ZZ VV DDU 58 16 1 16 600 9 500 1 700 970 13,9 12 000 8 000 14 000 62/28 ZZ VV DDU 68 18 1 ,1 26 700 14 000 2 730 1 430 12,4 10 000 7 500 13 000 63/28 ZZ VV DDU
30 42 7 0,3 4 700 3 650 480 370 16,4 15 000 9 000 18 000 6806 ZZ VV DD 47 9 0,3 7 250 5 000 740 510 15,8 14 000 8 500 17 000 6906 ZZ VV DDU 55 9 0,3 11 200 7 350 1 150 750 15,2 13 000 — 15 000 16006 — — — 55 13 1 13 200 8 300 1 350 845 14,7 13 000 8 000 15 000 6006 ZZ VV DDU 62 16 1 19 500 11 300 1 980 1 150 13,8 11 000 7 500 13 000 6206 ZZ VV DDU 72 19 1 ,1 26 700 15 000 2 720 1 530 13,3 9 500 6 700 12 000 6306 ZZ VV DDU
32 58 13 1 15 100 9 150 1 530 935 14,5 12 000 7 500 14 000 60/32 ZZ VV DDU 65 17 1 20 700 11 600 2 120 1 190 13,6 10 000 7 100 12 000 62/32 ZZ VV DDU 75 20 1 ,1 29 900 17 000 3 050 1 730 13,2 9 000 6 300 11 000 63/32 ZZ VV DDU
35 47 7 0,3 4 900 4 100 500 420 16,7 14 000 7 500 16 000 6807 ZZ VV DD 55 10 0,6 10 600 7 250 1 080 740 15,5 12 000 7 500 15 000 6907 ZZ VV DDU 62 9 0,3 11 700 8 200 1 190 835 15,6 11 000 — 13 000 16007 — — — 62 14 1 16 000 10 300 1 630 1 050 14,8 11 000 6 700 13 000 6007 ZZ VV DDU 72 17 1 ,1 25 700 15 300 2 620 1 560 13,8 9 500 6 300 11 000 6207 ZZ VV DDU 80 21 1 ,5 33 500 19 200 3 400 1 960 13,2 8 500 6 000 10 000 6307 ZZ VV DDU
40 52 7 0,3 6 350 5 550 650 565 17 ,0 12 000 6 700 14 000 6808 ZZ VV DD 62 12 0,6 13 700 10 000 1 390 1 020 15,7 11 000 6 300 13 000 6908 ZZ VV DDU 68 9 0,3 12 600 9 650 1 290 985 16,0 10 000 — 12 000 16008 — — — 68 15 1 16 800 11 500 1 710 1 180 15,3 10 000 6 000 12 000 6008 ZZ VV DDU 80 18 1 ,1 29 100 17 900 2 970 1 820 14,0 8 500 5 600 10 000 6208 ZZ VV DDU 90 23 1 ,5 40 500 24 000 4 150 2 450 13,2 7 500 5 300 9 000 6308 ZZ VV DDU
45 58 7 0,3 6 600 6 150 670 625 17 ,2 11 000 6 000 13 000 6809 ZZ VV DD 68 12 0,6 14 100 10 900 1 440 1 110 15,9 9 500 5 600 12 000 6909 ZZ VV DDU 75 10 0,6 14 900 11 400 1 520 1 160 15,9 9 000 — 11 000 16009 — — — 75 16 1 20 900 15 200 2 140 1 550 15,3 9 000 5 300 11 000 6009 ZZ VV DDU 85 19 1 ,1 31 500 20 400 3 200 2 080 14,4 7 500 5 300 9 000 6209 ZZ VV DDU 100 25 1 ,5 53 000 32 000 5 400 3 250 13,1 6 700 4 800 8 000 6309 ZZ VV DDU
Número do Rolamento
Aberto Blindado Vedado
Dimensões(mm)
d D B r mín.
Limite de Rotação (rpm)
Graxa Óleo Aberto Z - ZZ DU Aberto V - VV DDU Z
Fator
f0
Capacidade de Carga Básica (N) {kgf}
Cr C0r Cr C0r
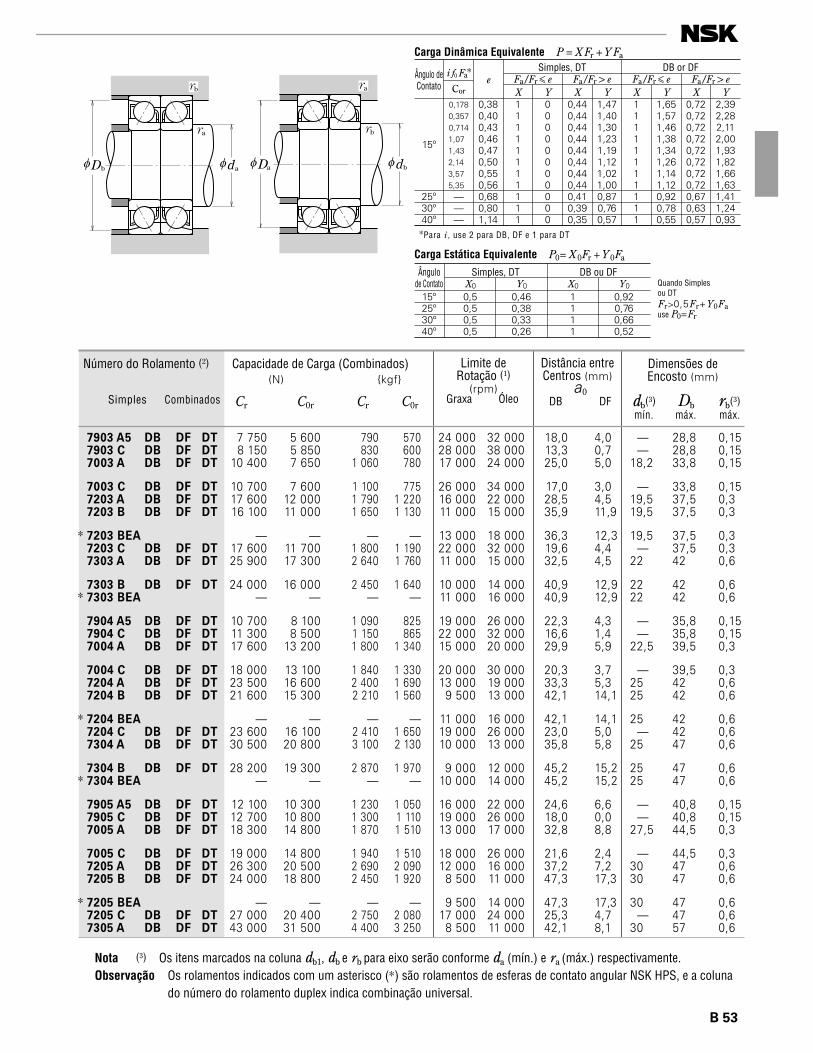
B 53
Número do Rolamento (2)
Simples Combinados
Dimensões de Encosto (mm)
db(3) Db rb(3) mín. máx. máx.
Limite de Rotação (1)
(rpm) Graxa Óleo
Capacidade de Carga (Combinados) (N) {kgf}
Cr C0r Cr C0r
Nota (3) Os itens marcados na coluna db1, db e rb para eixo serão conforme da (mín.) e ra (máx.) respectivamente.Observação Os rolamentos indicados com um asterisco (*) são rolamentos de esferas de contato angular NSK HPS, e a coluna
do número do rolamento duplex indica combinação universal.
7903 A5 DB DF DT 7 750 5 600 790 570 24 000 32 000 18,0 4,0 — 28,8 0,15 7903 C DB DF DT 8 150 5 850 830 600 28 000 38 000 13,3 0,7 — 28,8 0,15 7003 A DB DF DT 10 400 7 650 1 060 780 17 000 24 000 25,0 5,0 18,2 33,8 0,15
7003 C DB DF DT 10 700 7 600 1 100 775 26 000 34 000 17 ,0 3,0 — 33,8 0,15 7203 A DB DF DT 17 600 12 000 1 790 1 220 16 000 22 000 28,5 4,5 19,5 37 ,5 0,3 7203 B DB DF DT 16 100 11 000 1 650 1 130 11 000 15 000 35,9 11 ,9 19,5 37 ,5 0,3
* 7203 BEA — — — — 13 000 18 000 36,3 12,3 19,5 37 ,5 0,3 7203 C DB DF DT 17 600 11 700 1 800 1 190 22 000 32 000 19,6 4,4 — 37 ,5 0,3 7303 A DB DF DT 25 900 17 300 2 640 1 760 11 000 15 000 32,5 4,5 22 42 0,6
7303 B DB DF DT 24 000 16 000 2 450 1 640 10 000 14 000 40,9 12,9 22 42 0,6* 7303 BEA — — — — 11 000 16 000 40,9 12,9 22 42 0,6
7904 A5 DB DF DT 10 700 8 100 1 090 825 19 000 26 000 22,3 4,3 — 35,8 0,15 7904 C DB DF DT 11 300 8 500 1 150 865 22 000 32 000 16,6 1 ,4 — 35,8 0,15 7004 A DB DF DT 17 600 13 200 1 800 1 340 15 000 20 000 29,9 5,9 22,5 39,5 0,3
7004 C DB DF DT 18 000 13 100 1 840 1 330 20 000 30 000 20,3 3,7 — 39,5 0,3 7204 A DB DF DT 23 500 16 600 2 400 1 690 13 000 19 000 33,3 5,3 25 42 0,6 7204 B DB DF DT 21 600 15 300 2 210 1 560 9 500 13 000 42,1 14,1 25 42 0,6
* 7204 BEA — — — — 11 000 16 000 42,1 14,1 25 42 0,6 7204 C DB DF DT 23 600 16 100 2 410 1 650 19 000 26 000 23,0 5,0 — 42 0,6 7304 A DB DF DT 30 500 20 800 3 100 2 130 10 000 13 000 35,8 5,8 25 47 0,6
7304 B DB DF DT 28 200 19 300 2 870 1 970 9 000 12 000 45,2 15,2 25 47 0,6* 7304 BEA — — — — 10 000 14 000 45,2 15,2 25 47 0,6
7905 A5 DB DF DT 12 100 10 300 1 230 1 050 16 000 22 000 24,6 6,6 — 40,8 0,15 7905 C DB DF DT 12 700 10 800 1 300 1 110 19 000 26 000 18,0 0,0 — 40,8 0,15 7005 A DB DF DT 18 300 14 800 1 870 1 510 13 000 17 000 32,8 8,8 27 ,5 44,5 0,3
7005 C DB DF DT 19 000 14 800 1 940 1 510 18 000 26 000 21 ,6 2,4 — 44,5 0,3 7205 A DB DF DT 26 300 20 500 2 690 2 090 12 000 16 000 37 ,2 7 ,2 30 47 0,6 7205 B DB DF DT 24 000 18 800 2 450 1 920 8 500 11 000 47 ,3 17 ,3 30 47 0,6
* 7205 BEA — — — — 9 500 14 000 47 ,3 17 ,3 30 47 0,6 7205 C DB DF DT 27 000 20 400 2 750 2 080 17 000 24 000 25,3 4,7 — 47 0,6 7305 A DB DF DT 43 000 31 500 4 400 3 250 8 500 11 000 42,1 8,1 30 57 0,6
Ângulo de
Simples, DT DB or DF Contato
e Fa/Fr e Fa/Fr > e Fa/Fr e Fa/Fr > e X Y X Y X Y X Y 0,178 0,38 1 0 0,44 1 ,47 1 1 ,65 0,72 2,39 0,357 0,40 1 0 0,44 1 ,40 1 1 ,57 0,72 2,28 0,714 0,43 1 0 0,44 1 ,30 1 1 ,46 0,72 2,11 15º 1 ,07 0,46 1 0 0,44 1 ,23 1 1 ,38 0,72 2,00 1 ,43 0,47 1 0 0,44 1 ,19 1 1 ,34 0,72 1 ,93 2,14 0,50 1 0 0,44 1 ,12 1 1 ,26 0,72 1 ,82 3,57 0,55 1 0 0,44 1 ,02 1 1 ,14 0,72 1 ,66 5,35 0,56 1 0 0,44 1 ,00 1 1 ,12 0,72 1 ,63 25º — 0,68 1 0 0,41 0,87 1 0,92 0,67 1 ,41 30º — 0,80 1 0 0,39 0,76 1 0,78 0,63 1 ,24 40º — 1 ,14 1 0 0,35 0,57 1 0,55 0,57 0,93
Carga Dinâmica Equivalente P =X Fr +Y Fa
Carga Estática Equivalente P0=X 0Fr +Y 0Fa
*Para i , use 2 para DB, DF e 1 para DT
i f0 Fa*
Cor
Ângulo Simples, DT DB ou DF de Contato X0 Y0 X0 Y0
15º 0,5 0,46 1 0,92 25º 0,5 0,38 1 0,76 30º 0,5 0,33 1 0,66 40º 0,5 0,26 1 0,52
Quando Simples ou DTFr>0,5Fr+Y0Fause P0=Fr
Distância entre Centros (mm)
a0 DB DF

B 2
1
NSK
NE
ED
LE
BE
AR
ING
CAGE & NEEDLE ROLLER ASSEMBLIES
B 2
0
FW
F● FW
J
FW
F…
W
FB
N…
W
Inscri
bed
Cir
cle
Dia
mete
r 28 -
34 m
m
FBN…
W
φE
wφ
Fw
Bc
28
29
30
32
34
33 33 33 33 33 34 35 36 34 34 34 35 35 35 35 36 36 36 37 37 38 38 38 40 36 37 37 37 37 37 38 38 39 39 40 39
13 17 20 26 27 17 20 20 17 24 27 13 17 20 27 14 20 26 16 20 18 20 27 25 29 13 17 23 27 28 20 26 16 20 20 23
13 7
0017
100
21 9
00
27 1
0028
100
19 9
00
25 2
0026
200
17 5
0025
400
26 6
00
14 0
0018
700
21 0
00
28 7
0018
400
24 3
00
29 6
0022
200
26 0
00
25 5
0025
900
38 5
0038
500
22 3
0015
100
18 5
00
24 3
0031
500
25 2
00
24 9
0033
000
22 9
00
27 3
0028
400
25 1
00
20 4
0027
100
37 5
00
49 0
0051
500
29 1
00
35 5
0034
000
28 4
0046
000
48 5
00
21 6
0031
500
36 0
00
54 0
0026
900
38 5
00
49 5
0031
000
38 0
00
34 0
0034
500
57 5
0049
500
46 5
0024
400
31 5
00
44 5
0063
000
47 0
00
40 5
0059
000
33 0
00
41 0
0039
500
47 5
00
1 40
01
740
2 24
0
2 76
02
860
2 02
0
2 57
02
670
1 79
02
590
2 71
0
1 43
01
910
2 14
0
2 92
01
870
2 48
0
3 00
02
270
2 65
0
2 60
02
640
3 95
03
950
2 27
01
540
1 88
0
2 48
03
250
2 57
0
2 54
03
400
2 33
0
2 78
02
890
2 56
0
2 08
02
760
3 80
0
5 00
05
250
2 97
0
3 65
03
450
2 90
04
650
4 95
0
2 20
03
200
3 70
0
5 50
02
750
3 95
0
5 05
03
150
3 85
0
3 45
03
500
5 85
05
050
4 75
02
480
3 20
0
4 55
06
400
4 80
0
4 15
06
000
3 35
0
4 20
04
000
4 85
0
13 16 20 25 26 20 22 33 17 24 27 14 18 21 28 18 25 33 24 30 32 35 47 68 32 14 19 25 30 31 27 35 25 32 37 27
15 0
0015
000
15 0
00
15 0
0015
000
15 0
00
15 0
0016
000
14 0
0014
000
14 0
00
14 0
0014
000
14 0
00
14 0
0014
000
14 0
00
14 0
0014
000
14 0
00
14 0
0014
000
14 0
0015
000
13 0
0013
000
13 0
00
13 0
0013
000
13 0
00
13 0
0013
000
13 0
00
13 0
0013
000
12 0
00
FW
F-2
83
31
3F
WF
-28
33
17
FW
J-2
83
32
0
FW
F-2
83
32
6F
WF
-28
33
27
FW
F-2
83
41
7
FW
F-2
83
52
0F
WF
-28
36
20
FW
F-2
93
41
7F
WF
-29
34
24
FW
F-2
93
42
7
FW
F-3
03
51
3F
WF
-30
35
17
AF
WF
-30
35
20
FW
F-3
03
52
7F
WF
-30
36
14
FW
F-3
03
62
0
FW
F-3
03
62
6F
WF
-30
37
16
FW
F-3
03
72
0
FW
F-3
03
81
8F
WF
-30
38
20
FW
F-3
03
82
7F
WF
-30
40
25
FB
N-3
23
62
9W
AF
WF
-32
37
13
FW
J-3
23
71
7
FW
J-3
23
72
3F
WJ
-32
37
27
FW
F-3
23
72
8W
FW
F-3
23
82
0F
WF
-32
38
26
FW
J-3
23
91
6
FW
F-3
23
92
0F
WF
-32
40
20
FW
J-3
43
92
3
φE
wφ
Fw
Bc
FWF,
FW
JFW
F…W
φE
wφ
Fw
Bc
Bou
ndar
y D
imen
sion
s(m
m)
Fw
Ew
Bc
Bas
ic L
oad
Rat
ings
(N)
{k
gf}
Cr
Cor
Cr
Cor
Lim
iting
Spe
eds
(min-
1 )
Oil
Bea
ring
Num
bers
Mas
s(g
)
appr
ox-
0.2
-0
.55
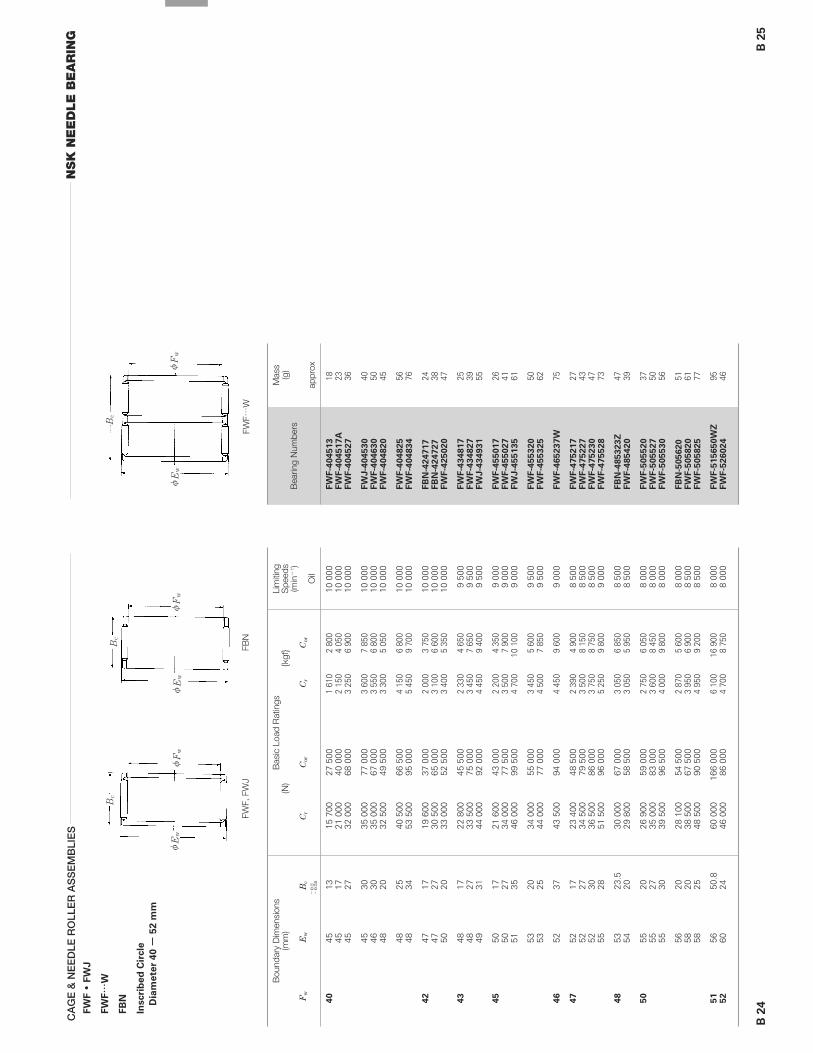
B 2
5
NSK
NE
ED
LE
BE
AR
ING
FWF…
W
φE
wφ
Fw
Bc
CAGE & NEEDLE ROLLER ASSEMBLIES
B 2
4
FW
F● FW
J
FW
F…
W
FB
N
Inscri
bed
Cir
cle
Dia
mete
r 40 -
52 m
m
40
42
43
45
46
47
48
50
51
52
45 45 45 45 46 48 48 48 47 47 50 48 48 49 50 50 51 53 53 52 52 52 52 55 53 54 55 55 55 56 58 58 56 60
13 17 27 30 30 20 25 34 17 27 20 17 27 31 17 27 35 20 25 37 17 27 30 28 23.5
20 20 27 30 20 20 25 50.8
24
15 7
0021
000
32 0
00
35 0
0035
000
32 5
00
40 5
0053
500
19 6
0030
500
33 0
00
22 8
0033
500
44 0
00
21 6
0034
000
46 0
00
34 0
0044
000
43 5
00
23 4
0034
500
36 5
0051
500
30 0
0029
800
26 9
0035
000
39 5
00
28 1
0038
500
48 5
00
60 0
0046
000
27 5
0040
000
68 0
00
77 0
0067
000
49 5
00
66 5
0095
000
37 0
0065
000
52 5
00
45 5
0075
000
92 0
00
43 0
0077
500
99 5
00
55 0
0077
000
94 0
00
48 5
0079
500
86 0
0096
000
67 0
0058
500
59 0
0083
000
96 5
00
54 5
0067
500
90 5
00
166
000
86 0
00
1 61
02
150
3 25
0
3 60
03
550
3 30
0
4 15
05
450
2 00
03
100
3 40
0
2 33
03
450
4 45
0
2 20
03
500
4 70
0
3 45
04
500
4 45
0
2 39
03
500
3 75
05
250
3 05
03
050
2 75
03
600
4 00
0
2 87
03
950
4 95
0
6 10
04
700
2 80
04
050
6 90
0
7 85
06
800
5 05
0
6 80
09
700
3 75
06
600
5 35
0
4 65
07
650
9 40
0
4 35
07
900
10 1
00
5 60
07
850
9 60
0
4 90
08
150
8 75
09
800
6 85
05
950
6 05
08
450
9 80
0
5 60
06
900
9 20
0
16 9
008
750
18 23 36 40 50 45 56 76 24 38 47 25 39 55 26 41 61 50 62 75 27 43 47 73 47 39 37 50 56 51 61 77 95 46
10 0
0010
000
10 0
00
10 0
0010
000
10 0
00
10 0
0010
000
10 0
0010
000
10 0
00
9 50
09
500
9 50
0
9 00
09
000
9 00
0
9 50
09
500
9 00
0
8 50
08
500
8 50
09
000
8 50
08
500
8 00
08
000
8 00
0
8 00
08
500
8 50
0
8 00
08
000
FW
F-4
04
51
3F
WF
-40
45
17
AF
WF
-40
45
27
FW
J-4
04
53
0F
WF
-40
46
30
FW
F-4
04
82
0
FW
F-4
04
82
5F
WF
-40
48
34
FB
N-4
24
71
7F
BN
-42
47
27
FW
F-4
25
02
0
FW
F-4
34
81
7F
WF
-43
48
27
FW
J-4
34
93
1
FW
F-4
55
01
7F
WF
-45
50
27
FW
J-4
55
13
5
FW
F-4
55
32
0F
WF
-45
53
25
FW
F-4
65
23
7W
FW
F-4
75
21
7F
WF
-47
52
27
FW
F-4
75
23
0F
WF
-47
55
28
FB
N-4
85323Z
FW
F-4
85
42
0
FW
F-5
05
52
0F
WF
-50
55
27
FW
F-5
05
53
0
FB
N-5
05
62
0F
WF
-50
58
20
FW
F-5
05
82
5
FW
F-5
15
65
0W
ZF
WF
-52
60
24
φE
wφ
Fw
Bc
FWF,
FW
JFB
N
φE
wφ
Fw
Bc
Bou
ndar
y D
imen
sion
s(m
m)
Fw
Ew
Bc
Bas
ic L
oad
Rat
ings
(N)
{k
gf}
Cr
Cor
Cr
Cor
Lim
iting
Spe
eds
(min-
1 )
Oil
Bea
ring
Num
bers
Mas
s(g
)
appr
ox-
0.2
-0
.55

B 117
30202 — 23 19 30 30 33 2 1 ,5 0,6 0,6 8,2 0,32 1 ,9 1 ,0 0,053 HR 30302 J 2FB 24 22 36 36 38,5 2 3 1 1 9,5 0,29 2,1 1 ,2 0,098 HR 30203 J 2DB 26 23 34 34 37 ,5 2 2 1 1 9,7 0,35 1 ,7 0,96 0,079 HR 32203 J 2DD 26 22 34 34 37 2 3 1 1 11 ,2 0,31 1 ,9 1 ,1 0,103 HR 30303 J 2FB 26 24 41 40 43 2 3 1 1 10,4 0,29 2,1 1 ,2 0,134 30303 D — 29 23 41 34 44 2 4,5 1 1 15,4 0,81 0,74 0,41 0,129 HR 32303 J 2FD 28 23 41 39 43 2 4 1 1 12,5 0,29 2,1 1 ,2 0,178 HR 32004 XJ 3CC 28 24 37 35 40 3 3 0,6 0,6 10,6 0,37 1 ,6 0,88 0,097 HR 30204 J 2DB 29 27 41 40 44 2 3 1 1 11 ,0 0,35 1 ,7 0,96 0,127 HR 30204 C-A- — 29 26 41 37 44 2 3 0,3 1 13,0 0,55 1 ,1 0,60 0,126 HR 32204 J 2DD 29 25 41 38 44,5 3 4 1 1 12,6 0,33 1 ,8 1 ,0 0,161 HR 32204 CJ 5DD 29 25 41 36 44 2 4 1 1 14,5 0,52 1 ,2 0,64 0,166 HR 30304 J 2FB 31 27 44 44 47 ,5 2 3 1 ,5 1 ,5 11 ,6 0,30 2,0 1 ,1 0,172 30304 D — 34 26 43 37 49 2 4 1 ,5 1 ,5 16,7 0,81 0,74 0,41 0,168 HR 32304 J 2FD 33 26 43 42 48 3 4 1 ,5 1 ,5 13,9 0,30 2,0 1 ,1 0,241 HR 320/22 XJ 3CC 30 27 39 37 42 3 3,5 0,6 0,6 11 ,1 0,40 1 ,5 0,83 0,103 HR 302/22 — 31 29 44 42 47 2 3 1 1 11 ,6 0,37 1 ,6 0,90 0,139 HR 302/22 C — 31 29 44 40 47 2 3 1 1 13,0 0,49 1 ,2 0,67 0,144 HR 322/22 — 31 28 44 41 47 2 4 1 1 13,5 0,37 1 ,6 0,89 0,18 HR 322/22 C — 31 29 44 39 48 2 4 1 1 15,2 0,51 1 ,2 0,65 0,185 HR 303/22 — 33 30 47 46 50 2 3 1 ,5 1 ,5 12,4 0,32 1 ,9 1 ,0 0,208 HR 303/22 C — 33 30 47 44 52,5 3 4 1 ,5 1 ,5 15,9 0,59 1 ,0 0,56 0,207 HR 32005 XJ 4CC 33 30 42 40 45 3 3,5 0,6 0,6 11 ,8 0,43 1 ,4 0,77 0,116 HR 33005 J 2CE 33 29 42 41 44 3 3 0,6 0,6 11 ,0 0,29 2,1 1 ,1 0,131 HR 30205 J 3CC 34 31 46 44 48,5 2 3 1 1 12,7 0,37 1 ,6 0,88 0,157 HR 30205 C — 34 32 46 43 49,5 2 4 1 1 14,4 0,53 1 ,1 0,62 0,155 HR 32205 J 2CD 34 30 46 44 50 2 3 1 1 13,5 0,36 1 ,7 0,92 0,189 HR 32205 C — 34 30 46 40 50 2 4 1 1 15,8 0,53 1 ,1 0,62 0,19 HR 33205 J 2DE 34 29 46 43 49,5 4 4 1 1 14,1 0,35 1 ,7 0,94 0,221 HR 30305 J 2FB 36 34 54 54 57 2 3 1 ,5 1 ,5 13,2 0,30 2,0 1 ,1 0,27 HR 30305 C — 36 35 53 49 58,5 3 4 1 ,5 1 ,5 16,4 0,55 1 ,1 0,60 0,276 HR 30305 DJ (7FB) 39 34 53 47 59 2 5 1 ,5 1 ,5 19,9 0,83 0,73 0,40 0,265 HR 31305 J 7FB 39 33 53 47 59 3 5 1 ,5 1 ,5 19,9 0,83 0,73 0,40 0,265 HR 32305 J 2FD 38 32 53 51 57 3 5 1 ,5 1 ,5 15,6 0,30 2,0 1 ,1 0,376 HR 320/28 XJ 4CC 37 33 46 44 50 3 4 1 1 12,8 0,43 1 ,4 0,77 0,146 HR 302/28 — 37 34 52 50 55 2 3 1 1 13,2 0,35 1 ,7 0,93 0,203 HR 302/28 C — 37 34 52 48 54 2 5 1 1 16,9 0,64 0,94 0,52 0,198 HR 322/28 — 37 34 52 49 55 2 4 1 1 14,6 0,37 1 ,6 0,89 0,243 HR 322/28 CJ 5DD 37 33 52 45 55 2 4 1 1 16,8 0,56 1 ,1 0,59 0,251 HR 303/28 — 39 37 59 58 61 2 4,5 1 ,5 1 ,5 14,5 0,31 1 ,9 1 ,1 0,341 HR 303/28 C — 39 38 59 57 63 3 5,5 1 ,5 1 ,5 17 ,4 0,52 1 ,2 0,64 0,335
Número do Rolamento
Sistema de
DimensãoISO355
Dimensão de Encosto(mm)
Cone Capa da db Da Db Sa Sb ra mín. máx. máx. mín. mín. mín. mín. máx.
Massa(kg)
aprox.
Centro da Linha de
Carga(mm)
a
Constante
e
Fatores de Carga Axial
Y1 Y0
Fa/Fr e Fa/Fr >e
X Y X Y
1 0 0,4 Y1
Carga Dinâmica Equivalente
P =X Fr +Y Fa
Carga Estática Equivalente
P0 =0,5Fr +Y0 Fa
Quando Fr >0,5Fr +Y0 Fa, use P0 =Fr
Os valores de e, Y1 , e Y0
estão relacionados na tabela abaixo.
a
Sa Sb
a
a b a b
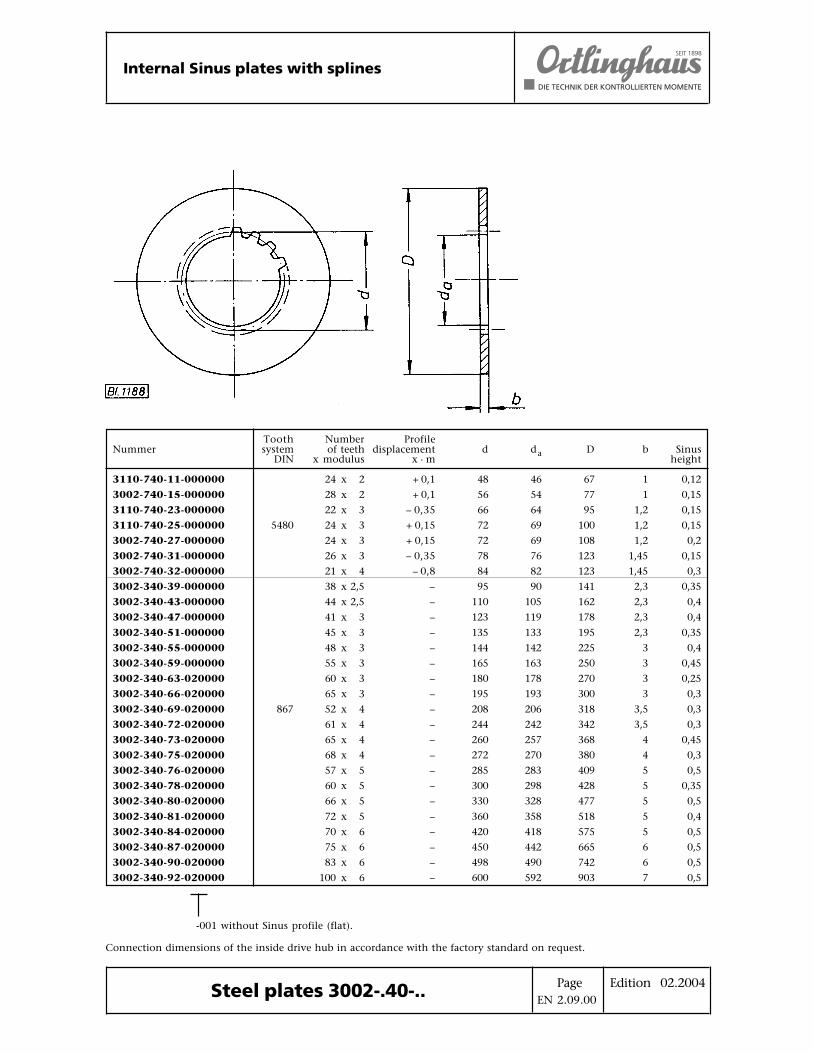
Edition 02.2004Page
Tooth Number ProfileNummer system of teeth displacement d da D b Sinus
DIN x modulus x · m height
3110-740-11-000000 24 x 2 + 0,1 48 46 67 1 0,12
3002-740-15-000000 28 x 2 + 0,1 56 54 77 1 0,15
3110-740-23-000000 22 x 3 – 0,35 66 64 95 1,2 0,15
3110-740-25-000000 5480 24 x 3 + 0,15 72 69 100 1,2 0,15
3002-740-27-000000 24 x 3 + 0,15 72 69 108 1,2 0,2
3002-740-31-000000 26 x 3 – 0,35 78 76 123 1,45 0,15
3002-740-32-000000 21 x 4 – 0,8 84 82 123 1,45 0,3
3002-340-39-000000 38 x 2,5 – 95 90 141 2,3 0,35
3002-340-43-000000 44 x 2,5 – 110 105 162 2,3 0,4
3002-340-47-000000 41 x 3 – 123 119 178 2,3 0,4
3002-340-51-000000 45 x 3 – 135 133 195 2,3 0,35
3002-340-55-000000 48 x 3 – 144 142 225 3 0,4
3002-340-59-000000 55 x 3 – 165 163 250 3 0,45
3002-340-63-020000 60 x 3 – 180 178 270 3 0,25
3002-340-66-020000 65 x 3 – 195 193 300 3 0,3
3002-340-69-020000 867 52 x 4 – 208 206 318 3,5 0,3
3002-340-72-020000 61 x 4 – 244 242 342 3,5 0,3
3002-340-73-020000 65 x 4 – 260 257 368 4 0,45
3002-340-75-020000 68 x 4 – 272 270 380 4 0,3
3002-340-76-020000 57 x 5 – 285 283 409 5 0,5
3002-340-78-020000 60 x 5 – 300 298 428 5 0,35
3002-340-80-020000 66 x 5 – 330 328 477 5 0,5
3002-340-81-020000 72 x 5 – 360 358 518 5 0,4
3002-340-84-020000 70 x 6 – 420 418 575 5 0,5
3002-340-87-020000 75 x 6 – 450 442 665 6 0,5
3002-340-90-020000 83 x 6 – 498 490 742 6 0,5
3002-340-92-020000 100 x 6 – 600 592 903 7 0,5
Internal Sinus plates with splines
Steel plates 3002-.40-..
-001 without Sinus profile (flat).
Connection dimensions of the inside drive hub in accordance with the factory standard on request.
EN 2.09.00
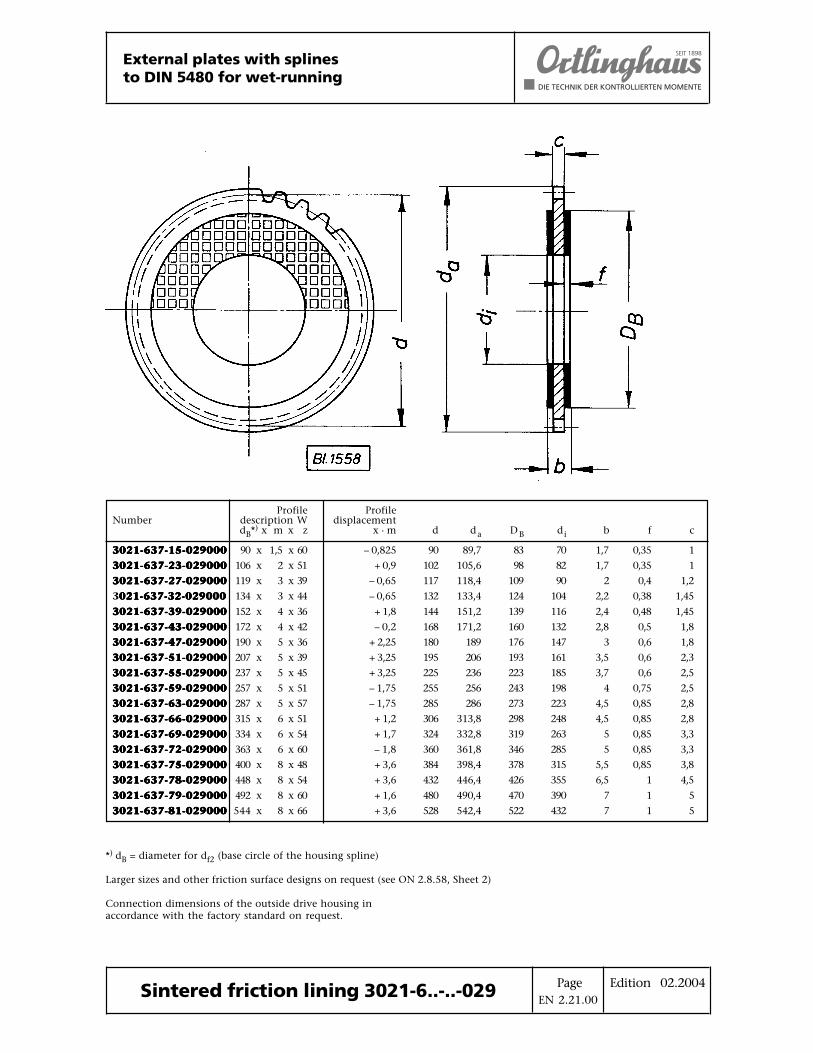
Edition 02.2004Page
Profile ProfileNumber description W displacement
dB*) x m x z x · m d da DB di b f c
3021-637-15-0290003021-637-15-0290003021-637-15-0290003021-637-15-0290003021-637-15-029000 90 x 1,5 x 60 – 0,825 90 89,7 83 70 1,7 0,35 1
3021-637-23-0290003021-637-23-0290003021-637-23-0290003021-637-23-0290003021-637-23-029000 106 x 2 x 51 + 0,9 102 105,6 98 82 1,7 0,35 1
3021-637-27-0290003021-637-27-0290003021-637-27-0290003021-637-27-0290003021-637-27-029000 119 x 3 x 39 – 0,65 117 118,4 109 90 2 0,4 1,2
3021-637-32-029000021-637-32-029000021-637-32-029000021-637-32-029000021-637-32-029000 134 x 3 x 44 – 0,65 132 133,4 124 104 2,2 0,38 1,45
3021-637-39-0290003021-637-39-0290003021-637-39-0290003021-637-39-0290003021-637-39-029000 152 x 4 x 36 + 1,8 144 151,2 139 116 2,4 0,48 1,45
3021-637-43-0290003021-637-43-0290003021-637-43-0290003021-637-43-0290003021-637-43-029000 172 x 4 x 42 – 0,2 168 171,2 160 132 2,8 0,5 1,8
3021-637-47-0290003021-637-47-0290003021-637-47-0290003021-637-47-0290003021-637-47-029000 190 x 5 x 36 + 2,25 180 189 176 147 3 0,6 1,8
3021-637-51-0290003021-637-51-0290003021-637-51-0290003021-637-51-0290003021-637-51-029000 207 x 5 x 39 + 3,25 195 206 193 161 3,5 0,6 2,3
3021-637-55-0290003021-637-55-0290003021-637-55-0290003021-637-55-0290003021-637-55-029000 237 x 5 x 45 + 3,25 225 236 223 185 3,7 0,6 2,5
3021-637-59-0290003021-637-59-0290003021-637-59-0290003021-637-59-0290003021-637-59-029000 257 x 5 x 51 – 1,75 255 256 243 198 4 0,75 2,5
3021-637-63-0290003021-637-63-0290003021-637-63-0290003021-637-63-0290003021-637-63-029000 287 x 5 x 57 – 1,75 285 286 273 223 4,5 0,85 2,8
3021-637-66-0290003021-637-66-0290003021-637-66-0290003021-637-66-0290003021-637-66-029000 315 x 6 x 51 + 1,2 306 313,8 298 248 4,5 0,85 2,8
3021-637-69-0290003021-637-69-0290003021-637-69-0290003021-637-69-0290003021-637-69-029000 334 x 6 x 54 + 1,7 324 332,8 319 263 5 0,85 3,3
3021-637-72-0290003021-637-72-0290003021-637-72-0290003021-637-72-0290003021-637-72-029000 363 x 6 x 60 – 1,8 360 361,8 346 285 5 0,85 3,3
3021-637-75-0290003021-637-75-0290003021-637-75-0290003021-637-75-0290003021-637-75-029000 400 x 8 x 48 + 3,6 384 398,4 378 315 5,5 0,85 3,8
3021-637-78-0290003021-637-78-0290003021-637-78-0290003021-637-78-0290003021-637-78-029000 448 x 8 x 54 + 3,6 432 446,4 426 355 6,5 1 4,5
3021-637-79-0290003021-637-79-0290003021-637-79-0290003021-637-79-0290003021-637-79-029000 492 x 8 x 60 + 1,6 480 490,4 470 390 7 1 5
3021-637-81-0290003021-637-81-0290003021-637-81-0290003021-637-81-0290003021-637-81-029000 544 x 8 x 66 + 3,6 528 542,4 522 432 7 1 5
*) dB = diameter for df2 (base circle of the housing spline)
Larger sizes and other friction surface designs on request (see ON 2.8.58, Sheet 2)
Connection dimensions of the outside drive housing inaccordance with the factory standard on request.
External plates with splinesto DIN 5480 for wet-running
Sintered friction lining 3021-6..-..-029EN 2.21.00



![Heterogeneidade/fragmentação da paisagem - Implicações para … · responses at a specific scale [...] thus, the multispectral domain exists as an integrating factor of scale](https://img.document.onl/doc/110x75/5be6ba1a09d3f2191b8b9110/heterogeneidadefragmentacao-da-paisagem-implicacoes-para-responses-at.jpg)