Embed Size (px)
Citation preview

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 1/101
Universidade Federal de GoiásEscola de Engenharia Elétrica e de Computação
DESENVOLVIMENTO DE UM KIT DE ROBÓTICADE BAIXO CUSTO
Arthur Moisés da Costa BorgesOrientador !ro"# $r# %osé &ilson 'ima (er)sCo*Orientador :!ro"# $r# Adem)r Gonçalves de Oliveira
Goiânia2011
Arthur Moisés da Costa Borges

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 2/101
2
DESENVOLVIMENTO DE UM KIT DE ROBÓTICA DE BAIXOCUSTO
$issertação de !ro+eto Final apresentada aoCurso de Graduação em Engenharia Elétrica daUniversidade Federal de Goiás, para o-tenção$o t.tulo de Engenheiro Eletricista#Área de concentração MicrocontroladoresOrentador !ro"# $r# %osé &ilson 'ima
(er)s#Co!Orentador:!ro"# $r# Adem)r Gonçalvesde Oliveira
Goiânia2011
Arthur Moisés da Costa Borges

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 3/101
3
DESENVOLVIMENTO DE UM KIT DE ROBÓTICA DE BAIXOCUSTO
$issertação de"endida e aprovada em ///// de ///////////// de ////////, pela Banca E0aminadora constitu.da pelos pro"essores#
////////////////////////////////////////// !ro"# %osé &ilson 'ima (er)s, !h$
//////////////////////////////////////////
//////////////////////////////////////////

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 4/101
4
AG1A$EC2ME(3O4
Aos meus pais e "amiliares, principalmente 5 minha av6, por ter cedido um 7uarto de sua casa
como la-orat6rio e 5 minha mãe, para 7ue compreendesse o uso do "ogão e "erro de passar roupas para con"eccionar as placas de "enolite#
Ao pro"essor, %osé &ilson 'ima (er)s, pelo apoio e entusiasmo ao apoiar o pro+eto, 7uando este
ainda era um simples es-oço no caderno#
Ao engenheiro eletricista Gustavo, pelas dicas em soldagem8"uração de placas e corrosão, 7ue
"oram muito importantes para a con"ecção das placas#
Agradeço 5 empresa +9nior de engenharia da UFG, E'O Engenharia %9nior, pelo suporte e
investimento no pro+eto, em sua "ase de maturação, e aos meus amigos :tila Gracco e ;i 'un 'u
por terem me au0iliado no desenvolvimento e na contri-uição com novas idéias#
Agradeço tam-ém ao pro"essor Adem)r Gonçalves de Oliveira pela a+uda na montagem
mec<nica dos motores, sensores e roda -o-a do ro-= seguidor de linha#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 5/101
5
SUMÁRIO
LISTA DE "I#URAS $
LISTA DE TABELAS %%SI#LAS UTILI&ADAS %'
RESUMO %(
ABSTRACT %)
% Introd*ção %+
>#> Conte0tuali?ação >@
># O-+etivos >
># Estrutura do tra-alho >D
' Ro,-tca Ed*cacona. %/
#> 2ntrodução >
# Conceitos de 1o-6tica >
0 1.ata2or3a Ard*no e Co34*tação "56ca '%
#> 2ntrodução >
# Am-iente de $esenvolvimento 2ntegrado
# A comunidade Arduino
# Computação F.sica D( Ro,7 6e8*dor de .n9a 0
(#> 2ntrodução H
# Motores H
# 4ensores H
# Cére-ro >
# !rinc.pio de Funcionamento >
) De6en;o.;3ento e con6tr*ção do c<re,ro do ro,7 0(
#> 2ntrodução
# O microcontrolador A3Mega >@D8D
# Circuito personali?ado com A3Mega D
# O pro+eto do circuito do cére-ro do ro-= D
# !rocesso de con"ecção da placa >

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 6/101
6
#@ Finali?ação da construção do cére-ro do ro-=
# M6dulo de regulação de tensão
+ De6en;o.;3ento e con6tr*ção do6 6en6ore6 do ro,7 )=
@#> 2ntrodução D
@# !ro+eto dos sensores
@# !rogramação dos sensores @
$ De6en;o.;3ento e con6tr*ção do 66te3a de .oco3oção do ro,7 ++
#> 2ntrodução @@
# O 4istema de $ireção $i"erencial @@
# $esenvolvimento e construção dos drivers dos motores CC @D
# !rogramação dos motores
= Monta8e3 do ro,7 4a66o a 4a66o ='D#> 2ntrodução D
D# !rimeiro prot6tipo da estrutura D
D# 4egundo prot6tipo da estrutura D
D# Custo da estrutura
Orça3ento #era. /0
#> 2ntrodução
# Custo total de construção do ro-=
% Conc.*6ão /)
RE"ER>NCIAS /+
ANEXO /$
LISTA DE "I#URAS

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 7/101
7
Ca4 III:
Fig #> Arduino U(O >
Fig # Arduino >#H 2$E
Fig # C6digo para piscar um 'E$ Fig # 1esultado do c6digo trans"erido ao Arduino
Fig # 'il)!ad Arduino @
Fig #@ Boarduino
Fig # 3atuino
Fig #D 4hield Ethernet D
Ca4 IV:Fig #> 'inha em meio aos sensores
Fig # Curva para a es7uerda
Ca4 V:
Fig #> A3Mega D
Fig # Cére-ro do 1o-=
Fig # Es7uemático do Cére-ro D
Fig # 'a)out do Cére-ro H
Fig # 'a)out do Cére-ro em !$F >
Fig #@ Circuito do sensor a ser con"eccionado
Fig # Corte do papel do circuito com estilete
Fig #D 4erra 3ico*tico
Fig # Corte "eito dos dois lados da placa de "enolite co-reado
Fig #>H !laca partida
Fig #>> 'i0agem da super".cie de co-re Fig #> !rocesso de trans"erIncia de calor
Fig #> 3rans"erIncia de calor "inali?ada @
Fig #> 2mersão da placa e do papel em água @
Fig #> 1etirando o papel começando pelas pontas

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 8/101
8
Fig #>@ 1etirada do papel 9mido da placa de "enolite D
Fig #> !laca pronta para corrosão D
Fig #>D !laca inserida na solução a7uosa de percloreto de "erro
Fig #> !laca corro.da
Fig #H 'avagem da placa com água corrente H
Fig #> !laca ap6s ser lavada H
Fig # 'i0agem da placa "inali?ada >
Fig # !laca e per"urador de placas >
Fig # 4oldagem do "otoresistor na placa
Fig # Cére-ro conclu.do
Fig #@ !rimeira página do datasheet do componente DH
Fig # Es7uemático do m6dulo regulador de tensão Fig #D 'a)out do m6dulo regulador de tensão @
Fig # 'a)out do m6dulo regulador de tensão em !$F @
Fig #H M6dulo 1egulador de 3ensão "inali?ado
Ca4 VI:
Fig @#> Es7uemático do circuito divisor de tensão e 'E$ acoplado D
Fig @# Es7uemático do sensor +unto ao microcontrolador @H
Fig @# 'a)out do sensor @>
Fig @# 'a)out do sensor em !$F @>
Fig @# 4ensores conclu.dos @
Fig @#@ !rimeira parte do c6digo dos sensores @
Fig @# 4egunda parte do c6digo dos sensores @
Fig @#D 3erceira parte do c6digo dos sensores @
Fig @# Jltima parte do c6digo dos sensores @
Ca4 VII:
Fig #> $ireção di"erencial * andar para "rente @
Fig # $ireção di"erencia * andar para es7uerda @
Fig # $ireção di"erencial * andar para direita @D

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 9/101
9
Fig # Circuito interno 32! >H @
Fig # Es7uemático do drivers dos motores H
Fig #@ 'a)out do driver do motor >
Fig # 'a)out do driver em !$F >
Fig #D $rivers dos motores conclu.dos
Fig # 2n.cio da programação dos motores
Fig #>H E7uivalIncia entre A3Mega >@D8D e Arduino
Fig #>> C6digo com a declaração dos Motores
Fig #> $eclaração das "unçKes para comandar os trIs estados do ro-=
Fig #> Função $oisMotoresL @
Fig #> Função MotorEs7uerdaL @
Fig #> Função Motor$ireitaL Fig #>@ C6digo para tomada de decisão entre sensores e motores
Fig #> $eclaração de variáveis para cali-ração D
Fig #>D C6digo de cali-ração dos sensores
Fig #> C6digo com os sensores e motores sincroni?ados DH
Ca4 VIII:
Fig D#> 2n.cio da "uração das placas de acr.lico D
Fig D# !laca de suporte pro motor D
Fig D# Furadeira de -ancada D
Fig D# 1egulador de tensão amarrado 5 placa de acr.lico D
Fig D# 4ensores e m6dulo regulador de tensão conectados 5 placa de acr.lico D
Fig D#@ Acoplagem dos motores 5 placa principal D
Fig D# $etalhe de cone0ão do driver 5 placa de acr.lico D@
Fig D#D Cone0ão dos drivers 5 placa de acr.lico principal D@
Fig D# 3odos os m6dulos conectados 5 placa de acr.lico D
Fig D#>H Cone0ão alinhada dos motores DD
Fig D#>> Nisão de cima do acoplamento dos motores DD
Fig D#> $etalhe de encai0e na roda do ei0o do motor D
Fig D#> $etalhe da roda -o-a D

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 10/101
10
Fig D#> $etalhe da nova con"iguração dos sensores H
Fig D#> $etalhe das hastes dos sensores para"usadas >
Fig D#>@ 1o-= "inali?ado >
LISTA DE TABELAS

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 11/101
11
Ca4 V:
3a-ela #> Comparação entre A3Mega >@D e D
3a-ela # 'ista de componentes e custo de construção do cére-ro do ro-=
3a-ela # 'ista de componentes e custo de construção do 1egulador de 3ensão
Ca4 VI:
3a-ela @#> 'ista de componentes e custo de con"ecção dos sensores @H
Ca4 VII:
3a-ela #> 'ista de componentes e custo de construção dos drivers dos motores @
Ca4 VIII3a-ela D#> 'ista de componentes e custo de construção da estrutura do ro-=
Ca4 IX3a-ela #> 3a-ela geral de custos do ro-=
SI#LAS UTILI&ADAS

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 12/101

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 13/101
13
RESUMO

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 14/101
14
Este pro+eto trata do desenvolvimento de um Pit de ro-6tica de -ai0o custo a ser usado por
alunos do ensino "undamental e médio# Este material tam-ém pode ser usado por alunos e
pro"essores de Engenharia Elétrica 7ue 7ueiram construir seus ro-=s e8ou adentrar o mundo da
computação ".sica# O produto "inal do Pit de ro-6tica é um ro-= seguidor de linha e é composto por vários m6dulos, como motores, sensores, rodas, chassi e cére-ro, 7ue serão montados pelos
alunos em um curso a ser ministrado nestas escolas# Este Pit será desenvolvido tendo como -ase
a plata"orma de ardQare e 4o"tQare open*source, Arduino# $urante o desenvolvimento do
ro-=, os alunos terão este tra-alho escrito em mãos no 7ual todos os m6dulos, princ.pio de
"uncionamento e caracter.sticas estão apresentados em uma linguagem de "ácil compreensão,
"acilitando assim o aprendi?ado em ro-6tica# !ara desenvolvimento do sensores, serão usados
'E$s de alto -rilho e '$1s L"otoresistor# !ara captar as in"ormaçKes dos sensores e converter em resposta aos motores, será usado o microcontrolador A3Mega D, cu+a programação será em
C8CRR usando o am-iente do Arduino L2$E# Os motores serão acionados através do transistor
32! >H, "uncionando como driver# A "onte de alimentação será um -ateria de (iM encontrada
em carrinhos de -rin7uedo de controle remoto#
ABSTRACT

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 15/101
15
3his pro+ect is a-out the development o" a loQ cost ro-otic Pit to -e used -) middle and high
school students# 3his QorP can also -e used -) Electrical Engineering students and teachers Qho
Qant to -uild its oQn ro-ots and8or enter the !h)sical Computing Qorld# 3he "inal product o" the
ro-otic Pit is a line "olloQer ro-ot, and itSs made -) the association o" man) modules, liPemotors, sensors, Qheels, structure and -rain, that Qill -e assem-led -) students in a class to -e
presented to them in schools# 3his Pit Qill -e -ased in the protot)ping open*source and open*
hardQare plat"orm called Arduino# &hile the ro-ot development, the students Qill have this
document, so liPe all modules, QorPing principles, and speci"ications are presented in a eas)
language, maPing it easier to students learn a-out ro-otics# 2n the development o" the sensors,
ver) -right 'E$s Qill -e use and photoresistorsL'$1s# 3o ac7uire in"ormation "rom the sensors
and to convert them in a response "or motors, Qill -e used a A3Mega D microcontroller, Qhich programming can -e done in C8CRR using ArduinoSs environment L2$E# 3he motors Qill -e
activated Qith 32! >H transistors, QorPing liPe a driver# 3he poQer source Qill -e a (iM
-atter), Qhich can -e "ound in remote control to) cars#
CA1ITULO I

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 16/101
16
% Introd*ção
%?% Conte@t*a.ação
Com a crescente evolução da tecnologia e da in"ormática, cresce ao mesmo tempo a
necessidade de estar atuali?ado em relação a estas tecnologias# A "ormação de pro"issionais
especiali?ados em áreas de alta tecnologia voltada para in"ormati?ação e in"ra*estrutura ocorrem
em geral nos cursos de E0atas#
A escolha pelo curso superior se dá geralmente no ensino médio, porém o gosto por
matérias espec."icas, se+am elas de E0atas, umanas ou Biol6gicas, começa mias cedo# Em
pa.ses em desenvolvimento como o Brasil, o n9mero de alunos 7ue se decidem por prestar cursos
nas áreas de E0atas é .n"imo em relação as outras áreas# !arte desta pouca procura é devido ao
TmedoT de matérias como matemática, e da incapacidade do pro"essor de conte0tuali?ar estas
disciplinas com a prática#
E0istem várias sa.das para corrigir este pro-lema# Uma delas é a apresentação dos
conte9dos de "orma interativa, para despertar o gosto e captar a atenção dos alunos# Ministrar
cursos voltados para a área de ro-6tica e computação, é uma estratégia, 7ue in"eli?mente está
restrita 5 poucas escolas particulares, devido ao alto custo dos Pits e da necessidade de pro"essores 7uali"icados para ministrar corretamente a disciplina#
O desenvolvimento de um it de 1o-6tica de Bai0o Custo é uma 6tima solução para
resolver estas 7uestKes#
Vuanto ao pr6prio ensino de Engenharia Elétrica na UFG, não e0istem soluçKes
estruturadas 7ue conte0tuali?em o ensino te6rico com a prática logo nos primeiros semestres do
curso# O "ato de muitos la-orat6rios serem "echados ou s6 a-ertos aos alunos na época de cursar
tais disciplinas aliado 5 -ai0a divulgação dos 7ue +á são a-ertos, contri-ui para 7ue alunos
"i7uem desmotivados ao longo do curso#
Escrever um tra-alho como este, ensinando os alunos a constru.rem seus pr6prios Pits de
ro-6tica, e o melhor, introdu?indo*os ao mundo da computação ".sica com Arduino, é uma 6tima
solução para 7ue eles conte0tuali?em o aprendi?ado te6rico com o prático durante todo o curso,

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 17/101
17
independente da disponi-ilidade dos la-orat6rios, e com certe?a aumente o interesse pelo curso e
a vivIncia da Engenharia Elétrica na prática, ainda dentro da Universidade#
A idéia de um Pit de ro-6tica de -ai0o custo surgiu na diretoria de !es7uisa e
$esenvolvimento da E'O Engenharia %9nior, a empresa +9nior das Engenharias da Universidade
Federal de Goiás LUFG# (o in.cio, a idéia era apenas desenvolver um Pit para ensinar ro-6tica a
alunos de ensino "undamental e médio de escolas p9-licas e particulares# Com o tempo, o pro+eto
Engenharia nas escolas, como assim é chamado, evoluiu, sendo inseridos outros cursos e
a-ordagens# Em +ulho de H>> a idéia dei0ou de ser um pro+eto interno da E'O e passou a ser
um pro+eto de e0tensão da UFG, passando a cola-orar vários pro"essores, técnicos e alunos da
Escola de Engenharia Elétrica e de ComputaçãoLEEEC#
%?' O,et;o6
O o-+etivo deste pro+eto é o desenvolvimento e construção de um prot6tipo de um ro-=
seguidor de linha, cu+a estrutura será dividida em vários m6dulos, como rodas, motores, sensores
e cére-ro# $esta "orma, o aluno poderá montar por si s6 o ro-=, e ver a in"luIncia de cada parte
na reali?ação da tare"a, 7ue a7ui será seguir uma linha em um percurso "echado# As partes do Pit
serão customi?áveis, de "orma 7ue se+a poss.vel ter vários ro-=s di"erentes, com o mesmo Pit,
usando os m6dulos em posiçKes di"erentes#
Aliado a construção do prot6tipo do ro-=, será documentado todo o processo, em "orma
de uma apostila, cu+a "unção é e0plicar passo*a*passo o "uncionamento de cada etapa do ro-= e a
import<ncia delas para o resultado "inal, 7ue é seguir uma linha preta em um "undo -ranco# O Pit
e a apostila poderão ser usados para ensinar ro-6tica para alunos do ensino "undamental e médio#
Além da a-ordagem nas escolas, os alunos e pro"essores da Escola de Engenharia
Elétrica e Computação da Universidade Federal de Goiás, tam-ém terão a oportunidade de
construir seus pr6prios ro-=s ou dispositivos -aseados em computação ".sica, ap6s ler este
material# Com certe?a a reprodução do produto "inal desde tra-alho será muito mais "ácilseguindo os passos descritos neste tra-alho#
Esses o-+etivos tam-ém estão de acordo com a continuação do desenvolvimento do
pro+eto de e0tensão Engenharia nas Escolas, 7ue tem o it de 1o-6tica de Bai0o Custo como

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 18/101
18
-ase# A idéia é divulgar o pro+eto amplamente, começando pelas Escolas de Engenharia, para 7ue
todos tenham acesso ao material, inclusive com o prop6sito de aper"eiçoá*lo#
%?0 E6tr*t*ra do Tra,a.9o
!ara alcançar os o-+etivos acima citados, o tra-alho "oi divido em vários cap.tulos, e estão
listados 5 seguir
* Cap.tulo 22 * Apresenta o tema ro-6tica e o ensino dela em escolas de ensino "undamental e
médio no Brasil#
* Cap.tulo 222 * Apresenta a plata"orma Arduino e ao mundo da Computação F.sica#
* Cap.tulo 2N * Apresenta o ro-= seguidor de linha#
* Cap.tulo N * $escreve o desenvolvimento e construção do cére-ro do ro-= e do m6dulo de
regulação de tensão#
* Cap.tulo N2 * $escreve o desenvolvimento e construção dos sensores do ro-=
* Cap.tulo N22 * $escreve o desenvolvimento e construção do sistema de locomoção do ro-=
* Cap.tulo N222 * $escreve a montagem do ro-= passo*a*passo#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 19/101
19
CA1TULO II
' Ro,-tca Ed*cacona.
'?% Introd*ção
A ro-6tica educacional é uma poderosa "erramenta para estimular alunos de ensino médio
e "undamental a desenvolver uma série de ha-ilidades, como pensamento l6gico, resolução de
pro-lemas, noção espacial, pensamento matemático e tra-alho em e7uipe# Com ela, alunos
podem ver 7ue o 7ue aprendem na escola tem aplicação prática, e isso contri-ui para aumentar o
desempenho escolar e o interesse em matérias antes consideradas apenas Tte6ricasT, como
matemática e ".sica#
O atual pro-lema -rasileiro se concentra em dois pilares custos dos Pits e materiais para
o ensino de ro-6tica e necessidade de capacitação pro"issional, de "orma 7ue o conte9do se+a
passado de "orma simples aos alunos#
E0istem diversos Pits de ro-6tica dispon.veis no Brasil, e amplamente usado em algumas
escolas particulares, como 'EGO Mindstorms (W3, por e0emplo# Entretanto, o valor destes Pits
chegam a custar mais de mil reais#
'?' Conceto6 de Ro,-tca
Um ro-= trata*se de uma má7uina capa? de perce-er o meio a sua volta e interagir com
ele, de acordo com uma instrução pré*programada# (o campo da ro-6tica educacional, um ro-=
é uma má7uina 7ue, ao ser programada, interage com o am-iente reali?ando alguma tare"a#
$essa "orma, 7ual7uer dispositivo guiado por controle remoto, ou 7ue dependa do controle do
aluno em tempo real não é um ro-=#$essa de"inição, um ro-= interage com o meio 5 sua volta através de sensores, e, a partir
destes, reali?am "unçKes através de atuadores# E0emplos de sensores são sensor de lu?, som,
imagens, pressão, temperatura, umidade, etc## E0emplos de atuadores são l<mpadas, motores,
etc## Atuadores serão descritos como dispositivos de sa.da, en7uanto 7ue sensores são

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 20/101
20
dispositivos de entrada# O processamento das in"ormaçKes rece-idas pelos sensores e tradu?idas
na resposta dos atuadores é "eito pelo microcontrolador, 7ue é o cére-ro do ro-=#
$urante um curso de ro-6tica os alunos são instigados a resolverem pro-lemas usando os
ro-=s# $essa "orma, é necessário entender como os ro-=s interagem com o am-iente, a "im de
propor a melhor solução para a resolução da tare"a, estimulando o pensamento l6gico e
matemático dos mesmos#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 21/101
21
CA1TULO III
0 1.ata2or3a Ard*no e Co34*tação "56ca
0?% Introd*ção
Arduino é uma plata"orma open*source e open*hardQare de prototipagem de circuitos
eletr=nicos microcontrolados desenvolvida pela Arduino 3eam em HH na 2tália# A sinta0e e as
-i-liotecas da linguagem de programação "oram -aseadas na plata"orma &iring, en7uanto 7ue o
am-iente integrado de desenvolvimento L2$E * 2ntegrated $evelopment Enviroment "oi -aseado
na linguagem !rocessing#A grande vantagem do Arduino é ser uma plata"orma de "ácil uso, em 7ue o processo de
pro+eto e desenvolvimento de aplicaçKes eletr=nicas microcontroladas é muito mais rápido e "ácil
do 7ue se usado um microcontrolador DH>, por e0emplo, em 7ue são necessários conhecimentos
de programação em Assem-l) e entendimento de registradores l6gicos# $evido a isso, a
plata"orma é amplamente utili?ada por designers e amadores, principalmente nos EUA e Europa,
por demandar pou7u.ssimos conhecimentos em programação e eletr=nica#
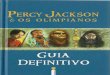
A "igura #> mostra uma "oto da placa U(O, em comparação com uma mão humana#
(esta "oto podem ser vistos o microcontrolador, A3MegaD, da A3ME', pinos de entrada e
sa.da, entrada U4B, -otão 1E4E3 e entrada de energia#
Figura #> Arduino U(O

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 22/101
22
Como é mostrado na "igura #>, uma placa padrão Arduino possui tudo 7ue uma pessoa
iniciante no mundo da computação ".sica precisa para iniciar seus estudos nessa área# (ão é
necessário sa-er de eletr=nica para pro+etar um sistema de alimentação para a placa, +á 7ue ela +á
conta com um regulador de tensão interno, e pode ser alimentado até pela energia elétrica 7ue sai
da porta U4B#
0?' A3,ente de De6en;o.;3ento Inte8rado
Em relação 5 programação da placa, tam-ém não é necessário vastos conhecimentos nas
linguagens C8CRRLusadas pelo Arduino, +á 7ue a 2$E L2ntegrated $evelopment Environment
vem com vários e0emplos para as mais diversas aplicaçKes, 7ue podem ser modi"icados para
resolver um pro-lema espec."ico do usuário, mas 7ue +á "oi resolvido de outra "orma por outra pessoa, e trans"ormado em um e0emplo# A "igura # mostra a 2$E do Arduino >#H L'ançada em
H>8>8H>>#
Figura # Arduino >#H 2$E#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 23/101
23
4endo assim, o 7ue torna a 2$E do Arduino simples de me0er, é simplesmente o "ato de
ser muito "ácil e rápido de começar a utili?á*la# X poss.vel, por e0emplo "a?er um 'E$ piscar
-astando conectar a placa ao computador por U4B, digitar o c6digo mostrado na Figura # na
2$E do Arduino e clicar no -otão Upload# O resultado é mostrado na "igura ##
Figura # C6digo para piscar um 'E$
Figura # 1esultado do c6digo trans"erido ao Arduino#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 24/101
24
Como visto, para ensinar iniciantes ou integrar pessoas ao mundo da computação ".sica é
muito mais e"ica? usar a plata"orma Arduino do 7ue ensinar diretamente em Assem-l), usando
um microcontrolador como o DH>, por e0emplo# A seguir está um c6digo em Assem-l) para
DH> 7ue "a? a mesma coisa 7ue o c6digo para o Arduino La 9nica di"erença é a "re7uIncia com
7ue o 'E$ pisca, devido 5 rotina de tempori?ador usada#
org 0000h
loop:
mov b, #0FFh
acall delay
clr p1.0
mov b, #0FFh
acall delay
mov p1, #0FFh
ajmp loop
delay:
djnz acc, delay
mov acc, #0FFh
djnz b, delay
ret
end

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 25/101
25
Além do c6digo ser muito maior, são usados mnem=nicos não tão evidentes para o
p9-lico novo na área, além de ser muito mais comple0o determinar a "re7uIncia com 7ue o 'E$
pisca# (o caso do Arduino, -asta passar o valor T2GT ou T'O&T para o pino > L7ue é onde o
'E$ vermelho da placa está conectado e escrever a "unção dela)L>HHH, em 7ue o valor entre
parInteses é o tempo em milisegundos em 7ue o microcontrolador "ica sem reali?ar nenhuma
ação#
E0plicando mais a "undo a linguagem Arduino, na "igura # podemos ver duas "unçKes
principais Tvoid setupLT e Tvoid loopLT# A palavra TvoidT indica 7ue estas "unçKes não retornam
nada ap6s serem e0ecutadas# A tipagem de "unçKes "oge do escopo deste tra-alho, entretando
pode ser aprendida estudando um pouco so-re linguagem C8CRRY>Z#
O mais importante a7ui, é 7ue tudo o 7ue é inserido dentro de Tvoid setupLT, delimitado
pelos dois colchetes, é e0ecutado apenas no in.cio do programa# (este e0emplo, "oi inserido a"unção TpinModeL>,OU3!U3[T, 7ue di? ao compilador 7ue o pino > será um pino de sa.da de
dados# !oderia tam-ém ser usado T2(!U3T, em ve? de TOU3!U3T, caso algum sensor estivesse
conectado ao pino ># Mais detalhes so-re sensores nos cap.tulos N e N2#
O 7ue é inserido dentro de Tvoid loopLT, é e0ecutado continuamente, em loop constante,
até 7ue o microcontrolador se+a desligado ou resetado# $entro desta "unção, entre colchetes,
como mostra a "igura #, é inserido a "unção Tdigital&riteL>,2G[T, 7ue seta o valor digital
alto ao pino >, "a?endo com 7ue o 'E$ vermelho integrado 5 placa acenda# $epois, é inserida a
"unção Tdela)L>HHH[T, "a?endo com 7ue o microcontrolador espere >HHH milisegundos, ou >
segundo, mantendo o 'E$ aceso por esse tempo#
A "unção seguinte é Tdigital&riteL>,'O&[T, setando um valor digital -ai0o ao pino >,
"a?endo com 7ue o 'E$ apague# !or "im, é inserida novamente a "unção Tdela)L>HHH[T, "a?endo
com 7ue o 'E$ "i7ue apagado por >HHH milisegundos, ou > segundo# Como a "unção Tvoid
loopLT roda continuamente, o 'E$ "icará piscando continuamente, em intervalos de > segundo#
0?0 A co3*ndade Ard*no
4em d9vidas, uma das maiores vantagens de se usar Arduino como "erramenta de
aprendi?ado em programação e8ou computação ".sica, ou em pro+etos pro"issionais é a "orça de
sua comunidade# Arduino "oi inicialmente ideali?ado por Massimo Ban?i, e de acordo com o

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 26/101
26
Arduino $ocumentar)YZ, "oi criado em uma época em 7ue o 2nstituto em 7ue era pro"essor, o
2nteraction $esign 2nstitute 2vrea, estava prestes a "echar, e para garantir 7ue o pro+eto não
morresse ap6s isso, a-riu os c6digos tanto de hardQare e so"tQare do pro+eto para todos 7ue
7uisessem usá*lo ou até mesmo modi"icá*lo# 2sto com certe?a "oi uma das melhores decisKes do
grupo LMassimo se +untou a outros amigos, compondo a Arduino 3eam, pois a idéia se e0pandiu
não s6 para designers e ho--istas, 7ue compunham o p9-lico alvo inicial, mas para 7ual7uer
pessoa interessada em aprender so-re computação ".sica ou microcontroladores#
A idéia evoluiu tanto, 7ue ho+e, em H>>, cerca de @ anos ap6s o primeiro lançamento da
placa, a e7uipe plane+a lançar versKes mais ro-ustas, como o lançamento da placa Arduino $ue,
em 7ue, em ve? de um microcontrolador A3Mega como cére-ro, um microprocessador A1M de
HM? reali?a as "unçKes de processamento#
O "ato de tanto o hardQare como so"tQare serem open*source, isto é, a-ertos para 7uem7uiser modi"icar e copiar os es7uemáticos e8ou c6digos, várias empresas lançaram suas pr6prias
placas -aseadas em Arduino, cu+os es7uemáticos tam-ém são a-ertos para outras pessoas
modi"icarem e melhorarem# O grande e0emplo disso é a gigante Google, 7ue lançou
recentemente uma "orma de conectar os dispositivos Android Lsmartphones e ta-lets 5 placas
Arduino, algumas delas desenvolvidas pela pr6pria empresaYZ#
Entretanto, algumas empresas vieram antes da Google, e 7ue a+udaram signi"icativamente
a e0pandir a cultura Arduino pelo mundo#E0emplos disso são as empresas 4parPFun Electronics,
criadora do 'il)!ad, Ada"ruit 2ndustries, criadora do Boarduino, e a empresa -rasileira, 3ato
E7uipamentos Eletr=nicos, criadora do 3atuino# As "iguras #, #@ e # mostram as placas
'il)!ad, Boarduino e 3atuino, respectivamente#
Figura # 'il)!ad Arduino

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 27/101
27
Figura #@ Boardunio
Figura # 3atuino
$a mesma "orma 7ue 7ual7uer pessoa pode "a?er suas pr6prias placas derivadas do
Arduino, muitas pessoas e empresa "a?em shields, dispositivos com uma "unção espec."ica 7ue
podem ser acoplados em uma placa Arduino, e0pandindo suas "uncionalidades# E0iste shield

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 28/101

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 29/101
29
e analisar como as pessoas interagem com o mundo digital, com certe?a esta pessoa está
adentrando o mundo da computação ".sica#
Falar so-re computação ".sica em um tra-alho como esse é essencial, por7ue, ao utili?ar
"erramentas como o Arduino para construir ro-=s, as pessoas estarão diretamente tra-alhando
com variáveis do meio, e "a?endo alguma coisa em resposta a ela# (o caso deste tra-alho, iremos
construir um ro-= para seguir uma linha no chão# Entretanto, é poss.vel avançar mais com
computação ".sica, usando sensores para perce-er como as pessoas transitam em um am-iente, e
como investir em sistemas 7ue melhorem o "lu0o delas# Este é s6 um dos vários e0emplos de uso
de computação ".sica#
Uma das "erramentas TmãesT do Arduino é a linguagem !rocessingYZ# Essa "erramenta é
-astante usada por pessoas 7ue tra-alham com processamento de imagens e computação visual#
Entretanto, mesclando*a com Arduino é poss.vel captar entradas de sensores e mostrá*los emuma tela, para melhor visuali?ação# X uma 6tima linguagem para 7uem está interessado em sa-er
mais ou até tra-alhar com computação ".sica#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 30/101
30
CA1TULO IV
( Ro,7 Se8*dor de Ln9a
(?% Introd*ção
O ro-= a ser desenvolvido neste tra-alho é um ro-= seguidor de linha# 3rata*se de um
ro-= 7ue tem o o-+etivo de seguir uma linha escura em uma super".cie clara Lpodendo tam-ém
seguir uma linha clara em um "undo escuro, dependendo da programação# Geralmente conta
com duas rodas traseiras ou dianteiras controladas por motores de corrente cont.nua Lpodendo
tam-ém ser usados motores de passo, ou servo motores, apesar de alcançar uma velocidade
menor e uma roda dianteira para esta-ili?á*lo# Esta roda é chamada de Troda -o-aT, por7ue elasimplesmente acompanha o movimento das duas rodas traseiras ou dianteiras, sem ter controle
pr6prio# Além das rodas para locomoção, o ro-= tam-ém conta com dois sensores, os 7uais são
responsáveis pela detecção da linha, e da di"erenciação dela em relação ao resto da super".cie#
(?' Motore6
Geralmente, são usados motores de passo Lservo motores ou motores de corrente
cont.nua para girarem as rodas# (este tra-alho "oram escolhidos motores de corrente cont.nua,
por serem mais "áceis de achar Lencontrado em praticamente 7ual7uer carrinho de -rin7uedo
guiado por controle remoto e por serem mais rápidos 7ue os motores de passo, podendo ser
usados em competiçKes, como a Olimp.ada Brasileira de 1o-6tica#
Os motores de corrente cont.nua são ligados ao microcontrolador através de um driver,
responsável por ampli"icar a corrente do microcontrolador, 7ue é insu"iciente para acionar o
motor diretamente#
(?0 Sen6ore6
Os sensores mais usados em ro-=s seguidores de linha são os constru.dos com
"otoresistor e o com "otodiodo8"ototransistor# O primeiro é signi"icativamente mais -arato e "ácil

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 31/101
31
de "a?er, en7uanto 7ue o segundo é mais caro, e mais comple0o de ser implementado# Foi
escolhido o primeiro, devido ao custo, e 5 "acilidade de se e0plicar o "uncionamento ao aluno#
Apesar de o sensor com "otoresistor ter estas vantagens, ele é muito mais impreciso, sendo
necessário reali?ar uma cali-ração via so"tQare ou hardQare Lcom o uso de potenci=metros de
a+uste#
Entretanto, no caso de desenvolvimento de outros sistemas re"erentes 5 computação
".sica, como um medidor de luminosidade de um am-iente, o uso "ototransistor é inviável
tecnicamente, sendo 7ue este s6 detecta dois estados de "uncionamentoLcom lu? ou sem lu?,
sendo necessário o uso de "otoresistor ou de outro componente 7ue detecta várias "ai0as de
luminosidade#
O sensor, além de ser implementado com "otoresistor ou "otodiodo8"ototransistor, tam-ém
conta com um 'E$, responsável por gerar o "ei0e de lu? a ser captado# O sensor é posicionadoem paralelo com o 'E$, e am-os virados para a super".cie 7ue o ro-= irá percorrer# Caso a
super".cie "or re"letora L"undo claro8 ausIncia da linha, o sensor consegue captar a lu? re"letida
por ela, enviando uma mensagem ao cére-ro do ro-=, indicando a ausIncia de linha# Caso a
super".cie não "or re"letora L"undo escuro8 presença da linha, o sensor não consegue captar a lu?,
pois essa "oi a-sorvida pela super".cie, enviando uma mensagem ao cére-ro do ro-=, indicando a
presença da linha#
(?( C<re,ro
O cére-ro do ro-= é constitu.do por um microcontrolador, responsável por "a?er a leitura
constante dos sensores, cali-rá*los, caso ha+a necessidade de "a?er isso via so"tQare, e tomar uma
decisão -aseada nessas entradas dos sensores# (este caso, o cére-ro cuidará de "a?er o
acionamento dos motores com -ase na comparação das respostas dos sensores#
(?) 1rnc54o de "*ncona3ento
(a construção do ro-=, são posicionados dois sensores, cu+a dist<ncia é igual ao tamanho
da linha a ser percorridaLessa linha geralmente é constru.da usando uma "ita isolante de cor preta
em uma cartolina -ranca, por e0emplo# Apesar de tam-ém poder ser usada uma cartolina de cor

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 32/101
32
preta com "ita crepe ou "ita adesiva de cor -ranca# Considerando a linha no meio dos sensores,
con"orme mostra a "igura #>, é enviado pelo microcontrolador Lcére-ro um comando para 7ue
os dois motores girem, a "im de 7ue o ro-= mova*se para "rente#
Figura #> 'inha em meio aos sensores#
Caso e0istir uma curva para a es7uerda, con"orme mostra a "igura #, o sensor da
es7uerda entrará na linha, e, neste caso, é enviado uma mensagem para o motor da es7uerda
parar, e o da direita continuar em movimento#
Figura # Curva para a es7uerda#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 33/101
33
2sso "ará com 7ue o ro-= vire para a es7uerda# Em caso oposto, com uma curva para a
direita, o ro-= parará o motor direito e girará o es7uerdo, "a?endo o ro-= virar pra direita# Esse
processo é chamado de T4istema de $ireção $i"erencialTY@Z#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 34/101
34
CA1TULO V
) De6en;o.;3ento e con6tr*ção do c<re,ro do ro,7
)?% Introd*ção
O Arduino é mais 7ue su"iciente para a construção de 7ual7uer ro-= seguidor de linha#
!ode*se simplesmente ligar os "ios correspondentes aos sensores nos pinos anal6gicos de sua
super".cie e os pinos dos motores tam-ém as seus respectivos pinos correspondentes# Entretanto,
o o-+etivo é desenvolver um ro-= seguidor de linha a ser usado em um Pit de ro-6tica de -ai0o
custo, 7ue se+a dividido em vários m6dulos, e 7ue os alunos consigam entender o "uncionamentode cada m6dulo, ligando uns nos outros, até "inali?ar o ro-=#
Assim, este cap.tulo trata do desenvolvimento e da construção do cére-ro do ro-=
seguidor de linha, e0plicando e mostrando todas as etapas necessárias#
)?' O 3crocontro.ador ATMe8a %+=0'=
O coração de 7ual7uer Arduino é um microcontrolador da A3ME'# (o caso do Arduino
$uemilanove ou U(O, o microcontrolador usado é o A3Mega, podendo ser >@D ou D# A ta-ela
#> mostra uma comparação entre am-os#
3a-ela #> Comparação entre A3Mega >@D e DE64ec2caçe6
Mcrocontro.adorATMe8a %+= ATMe8a 0'=
ClocP >@M? L>M2!48M? >@M?L>M2!48M?Mem6ria 1AM >B BMem6ria Flash >@B B
Mem6ria EE!1OM > -)tes >H -)tes L>B (9mero de 28O digitais > >
4a.das !&M @ LD-its @ LD-itsEntradas Anal6gicas @ L>H -its @ L>H -its
X um microcontrolador -astante versátil, se comparado a outras alternativas da A3ME',
como a plata"orma DH>, pois possui @ pinos de conversor anal6gico *digital integrado de >H -its,

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 35/101
35
sem precisar recorrer a componentes e0ternos# !ossui "re7uIncia de clocP de >@M?, +á
otimi?ado com o -ootloader nativo do Arduino# Outra vantagem é possuir @ portas !&M L!ulse
&idth Modulation * Modulação por largura de pulso sem contudo comprometer o seu tamanho
Lpossui D pinos contra as versKes de H pinos do DH># O mesmo é mostrado na "igura #>#
Figura #> A3MegaD#
)?0 Crc*to 4er6ona.ado co3 ATMe8a 0'=
!or se tratar de um pro+eto de -ai0o custo, a placa de prototipagem do Arduino não será
usada# Em ve? disso, "oi desenvolvida uma versão espec."ica para o pro+eto do ro-= seguidor de
linha, a 7ual está mostrada na "igura ##
Figura # Cére-ro do ro-=

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 36/101
36
Esta placa do cére-ro do ro-= conta com um cristal remov.vel Lsem solda de >@M?,
dois capacitores de pF para esta-ili?ação dos pulsos do cristal, um resistor de >HP] para o
1E4E3 Lum -otão pode ser implementado em "uturas versKes sem grandes modi"icaçKes no
design, > resistor de >HP] e um capacitor de pF para cada entrada do sensor de linha, so7uete
torneado de D pinos para o microcontrolador A3Mega D, dois conectores para"usáveis de
pinos para os sensores, dois conectores para"usáveis de pinos para os drivers dos motores e >
conector para o m6dulo de energia#
Além disso, o microcontrolador A3Mega D não "oi comprado avulso# (ão e0iste
produção nacional para esse tipo de componente, e todos os 7ue são vendidos tem um alto custo
devido 5 escasse? e 5s ta0as de importação# Em média, o custo deste componente varia de 1^
>,H a 1^ ,HH sem incluir o "rete para Goi<nia# Caso "osse optado a importação deste
componente, o preço sairia mais em conta, na "ai0a de 1^ D,HH a 1^ >H,HH, su+eito a oscilaçKesno d6lar e sem contar impostos de importação Lgeralmente mercadorias a-ai0o de ^H não são
ta0adas pela al"<ndega
Assim, como seria necessário um gravador para o microcontrolador de 7ual7uer "orma,
pre"eriu*se importar uma placa Arduino diretamente da China, usando o site de compras
internacionais eBa), como meio# $essa "orma, o con+unto de placa Arduino mais
microcontrolador A3Mega D 7ue ainda "unciona como gravadora, saiu por 1^ ,HH#
Outra vantagem de comprar esse Tcom-oT é 7ue o microcontrolador A3Mega D +á vem
com o -ootloader gravado, 7ue é um c6digo 7ue permite a trans"ormação dos programas escritos
na linguagem Arduino para a linguagem de má7uina, 7ue o microcontrolador entende# Os valores
da placa Arduino a7ui no Brasil variam entre 1^ H,HH a 1^ >H,HH, sendo ainda muito mais
vanta+oso importar da China através de sites como eBa)YZ e $eale0tremeYDZ# Ao se comprar um
microcontrolador virgem, é necessário gravar o -ootloader do Arduino nele, 7ue não é um
processo trivial, e ainda sairia mais caro, pois na maioria das ve?es é preciso comprar uma
gravadora espec."ica para isso# A ta-ela # mostra a listagem dos componentes e seus
respectivos custos#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 37/101
37
3a-ela # 'ista de componentes e custo da construção do Cére-ro do 1o-=#
Co34onente F*antdade Loca. de co34ra C*6to UntGro C*6to Tota.!laca Arduino
Lcom
microcontrolador
A3Mega D
> eBa) 1^ ,HH 1^ ,HH
Capacitor
cer<mico pF
Eletr=nica 4antos$ummont, rua @D
LGoi<niaYZ
1^ H,H 1^ H,H
1esistor >HP] 1^ H,H 1^ H,>Cristal >@M? > 1^ >,HH 1^ >,HH
4o7uete torneado
D pinos > 1^ >,HH 1^ >,HH
Conector
para"usável de
pinos
> 1^ H,H 1^ H,H
Conector
para"usável de
pinos
1^ >,H 1^ @,HH
Outros * * 1^ >,HHTota. C<re,ro 1^,
O valor total gasto para construir então o cére-ro do ro-= "oi de apro0imadamente 1^
,# O item da lista denominado de ToutrosT se re"ere 5 compra de placas de "enolite co-reado,
em 7ue o valor unitário é de 1^ >,DH, de percloreto de "erro para corrosão das placas Lgeralmente
cerca de 1^ D,HH e de gastos com compra de papel couchI para impressão dos circuitos e da
impressão 5 laser em si# Esse valor "oi estimado em apro0imadamente 1^ >,HH por7ue não se
teve o controle de 7uantas placas de "enolite co-reado "oram compradas nem da 7uantidade de"olhas 7ue "oram gastas Lnas etapas iniciais do pro+eto, muitos insumos "oram gastos até 7ue se
pudesse dominar o processo de "a-ricação#
Entretanto, como as placas de "enolite co-reado, "olhas de papel couche e solução de
percloreto de "erro "oram usadas para todos os circuitos do pro+eto, este valor re"erente a
TOutrosT de 1^ >,HH s6 será inclu.da nesta primeira ta-ela# Aliás, com uma solução 9nica de

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 38/101
38
percloreto de "erro é poss.vel de se "a?er centenas de placas como essa, sem ser necessário
comprar novamente#
!ara se ter uma idéia, a solução de percloreto de "erro do la-orat6rio de
microprocessadores e Microcontroladores da Escola de Engenharia Elétrica e de Computação
tem mais de 7uatro anos, e "oi usada para corroer alguns prot6tipos usados nesse tra-alho sem
pro-lema algum Lcontudo, o tempo de corrosão aumenta proporcionalmente 5 7uantidade de
corrosKes reali?adas com a mesma solução#
)?( O 4roeto do crc*to do c<re,ro do ro,7
O circuito da placa "oi pro+etado e desenhado usando o so"tQare EAG'E, o 7ual +á conta
com todos os -locos dos componentes, principalmente do microcontrolador A3Mega >@D8D# A"igura # mosta o es7uemático do circuito do cére-ro do ro-=#
Figura # Es7uemático do Cére-ro
Antes de ter se adotado o EAG'E como so"tQare para desenvolver os circuitos, "oi usado
o !roteus# A vantagem do EAG'E so-re esse 9ltimo é a disposição dos pinos dos -locos de

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 39/101
39
componentes# (o caso do A3Mega D, o EAG'E distri-ui de "orma inteligente os pinos do C2#
$o lado es7uerdo, estão os pinos re"erentes a ligaçKes pertinentes para o "uncionamento do
microcontrolador, como 1E4E3, 7ue é ativo -ai0o, tendo 7ue ser ligado a N para 7ue ele não
resete# 3al ligação é "eita usando a cone0ão NCC em série com o resistor de >HP]# O pino do
1E4E3 é o pino >#
Ainda do lado es7uerdo, "oram "eitas as cone0Kes de NCC aos pinos ANCC Lpara
alimentação do conversor anal6gico*digital interno e A1EF Lsetando a re"erIncia do pino
anal6gico em N# 3am-ém "oram "eitas as cone0Kes dos pinos e D ao G($ e conectados os
capacitores ao cristal, e este aos pinos e >H do microcontrolador#
%á do lado es7uerdo, estão o restante dos pinos de controle do microcontrolador# Os pinos
a D são as entradas para o conversor anal6gico*digital, sendo 7ue é poss.vel usar os pinos
e D para cone0Kes 4$A e 4C', a "im de "a?er comunicação 2C com outros peri"éricos emicrocontroladores#
Foram usados os pinos e D para cone0ão dos sensores de linha, sendo 7ue há um
resistor de >HP] e um capacitor de pF em paralelo, para servir de divisor de tensão com o
"otoresistor e de "iltro de ru.dos, respectivamente#
!ara os drivers dos motores, "oram usados duas sa.das !&M L!ulse &idth Modulation *
Modulação por largura de pulso do microcontrolador, situadas nos pinos > e >@ do A3Mega
D# As outras sa.das !&M se encontram nos pinos , >>, > e ># X poss.vel usar os pinos e
para comunicação serial com o microcontrolador#
Acima, do lado es7uerdo, podemos ver um conector para NCC e G($# Essa alimentação
+á é de N, sendo entregada pelo m6dulo de regulador de tensão, a ser a-ordado na seção ##
Ap6s desenvolver o es7uemático do cére-ro, "oi reali?ado o desenho do circuito a ser
con"eccionado# !or se tratar de um tra-alho voltado para pessoas sem muito conhecimento na
área de con"ecção de placas de circuito impresso, o desenho do circuito "oi "eito usando apenas
uma camada e poucos +umpers L"ios 7ue simulam dupla "ace, de "orma 7ue o ro-= possa ser
reprodu?ido e modi"icado por pessoas com n.vel técnico m.nimo#
A "igura # mostra o la)out da placa de circuito impresso do cére-ro do ro-=#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 40/101
40
Figura # 'a)out do Cére-ro
$e a?ul estão as trilhas e a malha de terra LG($, usada para "acilitar o design# $e verde,
estão dos pinos para se soldar os componentes na placa# Os pinos mais ovais representam a
cone0ão do microcontrolador L$uas "ileiras de > pinos em se7uIncia e os conectores no canto
in"erior, da es7uerda para a direita, estão o conector do m6dulo do regulador de tensão e de um
dos drivers dos motores# (o canto es7uerdo, de cima para -ai0o, estão os dois conectores dos
sensores de linha e um conector do driver do segundo motor#
Ap6s desenhar o circuito no EAG'E, "oi reali?ado a e0portação do desenho em escala
>> para o "ormato #!$F, e o desenho do mesmo, agora monocromático, está mostrado na "igura
##

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 41/101
41
Figura # 'a)out do Cére-ro em !$F#
(esta "igura # é poss.vel perce-er um "ator interessante# A trilha hori?ontal mais
in"erior toca em pinos de conectores para"usáveis logo em cima# 4e isso tivesse sido mantido,
no momento de operação do ro-=, haveria um curto*circuito nessa região# (ão se sa-e por7ue
ra?Kes ocorreu essa +unção, sendo 7ue na "igura # as trilhas estão espaçadas dos conectores,
con"orme o pro+eto original# 3alve? um pro-lema de conversão do pr6prio programa EAG'E na
hora de converter o la)out para !$F# Entretanto, o importante a7ui é 7ue estas "alhas geralmenteocorrem, e uma maneira de corrigi*las é riscando com um material pontudo a cone0ão entre elas,
antes de corroer a placa#
O processo generali?ado de con"ecção de placas de "enolite será a-ordado na pr60ima
seção, en7uanto 7ue a continuação da con"ecção da placa Cére-ro do 1o-= será retomada na
seção #@#
)?) 1roce66o de con2ecção da 4.aca
(esta seção será e0plicado com detalhes o processo de con"ecção de uma placa, tendo
como -ase o circuito do sensor, a ser a-ordado no cap.tulo @# O uso de um circuito di"erente do
7ual "oi a-ordado nesse cap.tulo não acarreta em nenhum pro-lema para a e0plicação do
processo, +á 7ue este pode ser "eito para 7ual7uer circuito#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 42/101
42
4erá usado então o circuito do sensor, con"orme mostrado na "igura #@
Figura #@ Circuito do sensor a ser con"eccionado
A primeira coisa a "a?er é cortar o papel do tamanho do sensor, como mostra a "igura ##
!ode ser usada 7ual7uer "erramenta cortante, como tesoura, estilete, etc# (o caso do estilete,
recomenda*se usar uma super".cie protetora L"oi usado uma -ase de alum.nio para não se cortar
a mesa#
Figura # Corte do papel do circuito com estile
Ap6s cortado o papel, deve*se cortar a placa de "enolite co-reado# !odem ser usadas
diversas "erramentas para isso# (a maioria das placas usadas neste tra-alho, "oi usada uma serra
tico*tico, con"orme mostra a "igura #D#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 43/101
43
Figura #D 4erra 3ico*tico
!ara outras placas, "oi usada uma "erramenta cortante pontuda, como um estilete# Esse
9ltimo método é mais simples, ideal para se cortar placas pe7uenas e "ácil de se utili?ar# !ara esta
placa de demonstração "oi usado estilete, mas é -om cortar dos dois lados Llado "enolite e do ladodo co-re, con"orme mostra a "igura ## $epois "oi s6 partir a placa com as duas mãos, para 7ue
"icasse con"orme mostra a "igura #>H#
Figura # Corte "eito dos dois lados da placa de "enolite co-reado

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 44/101
44
Figura #>H !laca partida
O pr60imo procedimento é trans"erir a tinta do papel para a placa de "enolite co-reado# O
circuito "oi impresso em papel couchI, mas o processo seria muito mais "ácil caso "osse usado
papel gloss#
A primeira coisa a se "a?er antes de iniciar o processo de trans"erIncia de calor é limpar a
placa de "enolite co-reado# !ara isso, é usado um pedaço de palha de aço, 7ue será aproveitado
posteriormente para li0ar a placa novamente, ap6s o processo de corrosão# $essa "orma, o gasto
com palha de aço é m.nimo, sendo inclu.do na primeira ta-ela de custos, dentro de TOutrosT#
O processo de li0agem é mostrado na "igura #>># $eve se li0ar a placa até 7ue ela "i7ue
com aspecto relu?ente# 2sso é "eito para tirar a "errugem e "acilitar o processo de trans"erIncia de
calor#
Figura #>> 'i0agem da super".cie de co-re

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 45/101
45
O processo de trans"erIncia de calor reali?ado nesse tra-alho "oi "eito usando um "erro de
passar roupas comuns, destes 7ue todos temos em casa# Entretanto, é totalmente recomendável
7ue não se+a usado um "erro 5 vapor#
A primeira coisa a se "a?er é posicionar o papel do circuito recortado so-re a parte do
co-re da placa de "enolite li0ada# $eve*se alinhar -em o papel, segurando*o com os dedos
durante a parte inicial desse procedimento# O alinhamento do papel é mostrado na primeira parte
da "igura #>#
Figura #> !rocesso de trans"erIncia de calor
$epois, deve*se passar o "erro de passar roupas suavemente em um dos cantos do papel#
A7ui é importante 7ue o papel não se me0a de maneira alguma_ Caso contrário, a tinta -orrará
grande parte do circuito, devendo*se imprimir e recortar outro circuito, além de ter 7ue li0ar a
placa novamente# !ara 7ue o processo todo se+a -em sucedido, é importante nunca passar o "erro
en7uanto reali?a pressão so-re o papel# $eve se "a?er pressão constante em diversos pontos do
papel, sem arrastá*lo#
A terceira parte da "igura #> mostra a reali?ação de pressão com o "erro so-re todo o
papel# $eve ser "a?er isso uni"ormemente por apro0imadamente minutos# O tempo varia
con"orme a prática, e é menor caso se+a usado papel gloss#
O processo deve ser reali?ado até 7ue se+a poss.vel ver as trilhas na parte de cima do
papel, e não há pro-lema se o papel "icar um pouco 7ueimado# O processo "inali?ado pode ser visto na "igura #>#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 46/101
46
Figura #> 3rans"erIncia de calor "inali?ada
Ap6s reali?ar o processo de trans"erIncia de calor, o papel deve ser removido para 7ue
"i7ue s6 a tinta so-re a placa, preparando*o para corrosão# !ara retirada do papel, a placa e o
papel devem ser molhados com água corrente ou imersos em um recipiente com água, sendo 7ue
esse 9ltimo processo é mais e"iciente e gasta*se muito menos água# A "igura #> ilustra esse
procedimento#
Figura #> 2mersão da placa e do papel em água

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 47/101
47
O papel dará sinais de 7ue pode ser removido ap6s as -ordas começarem a escurecer,
como mostra "igura #># 2sso ocorre por7ue a tinta 7ue está de -ai0o do papel começa a aparecer
e este é outro indicativo de 7ue o processo de trans"erIncia de calor "oi -em sucedido# Vuando o
papel estiver -em 9mido, o papel poderá ser retirado# 2sso deve ser "eito com as pontas dos
dedos, pu0ando uma pontinha do papel antes, con"orme mostra a "igura #>#
Figura #> 1etirando o papel começando pelas pontas
X importante começar pelas pontas, para assegurar 7ue não se remova a tinta +unto com o
papel, durante o processo#X poss.vel 7ue o papel se des"arele durante o procedimento# (ão tem pro-lema, desde
7ue a tinta não se+a removida +unto# 4e "or usado papel gloss, é maior a pro-a-ilidade de o papel
sair por inteiro# Entretanto, neste caso "oi usado papel couchI, e parte do papel saiu inteira,
con"orme mostra a "igura #>@#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 48/101
48
Figura #>@ 1etirada do papel 9mido da placa de "enolite
$epois de retirar a parte mais signi"icativa do papel, é importante retirar com um material pontudo o restante do papel 7ue "ica preso entre as trilhas, por7ue, caso os mesmos permaneçam,
a corrosão não atuará corretamente# (o "inal do processo, a placa deverá "icar con"orme mostra a
"igura #>#
Figura #> !laca pronta para corrosão
(a "igura #> tam-ém "oi "eito um "uro com per"urador de placa na e0tremidade
superior direita da placa e amarrado um -ar-ante para mergulhar a placa em solução a7uosa de
percloreto de "erro# A Figura #>D mostra a placa inserida nesta solução#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 49/101
49
Figura #>D !laca inserida na solução a7uosa de percloreto de "erro
Fatores como concentração de percloretor de "erro, temperatura, 7uantidade de uso e
agitação mec<nica in"luenciam drasticamente no tempo de corrosão da placa# Como esta solução
usada +á estava -astante saturada de percloreto de "erro, o tempo de corrosão "oi de a H
minutos# A "igura #> mostra a grande saturação da placa, perce-ido pela presença de Tsais de
co-reT na placa#
Figura #> !laca corro.da
O procedimento seguinte é lavar a placa para retirar o restante da solução de percloreto
de "erro, e nesse caso é aconselhável usar água corrente, con"orme mostra a "igura #H#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 50/101
50
Figura #H 'avagem da placa com água corrente
A "igura #> mostra a placa ap6s lavada# O pr60imo passo consiste na li0agem da tinta
restante na placa, e0pondo o co-re# 2sto está mostrado na "igura ##
Figura #> !laca ap6s ser lavada

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 51/101
51
Figura # 'i0agem da placa "inali?ada
!or "im, -asta "urar a placa na região dos "uros# !ode se usar o per"urador de placa ou
"uradeira de -ancada# A "igura # mostra a placa e o per"urador de placas#
# !laca e per"urador de placas
Ap6s esse processo, a placa +á está pronta para se soldar os componentes# A soldagem é
"eita usando "erro de solda espec."ico para eletr=nica e estanho pr6prio para essa tare"a tam-ém#
(a hora de soldar os componentes, "oi li0ada a placa mais uma ve? com palha de aço, e usada
pasta de solda para "acilitar a soldagem#Esta seção a-ordará apenas a soldagem do "otoresistor 5 essa placa, para "ins de
demonstração de como soldar# A placa de sensores "inali?ada é a-ordada no cap.tulo @#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 52/101
52
A recomendação de soldagem de componentes se resume a primeiramente estanhar
-astante a ponta do "erro de solda Listo é, derreter um pedaço de "io de estanho na sua ponta e
limpar o e0cesso com uma espon+a umedecia# Ap6s isso, deve*se conectar o componente 5 placa
e a7uecer o conector usando o "erro de solda# $epois, encostar o estanho no conector, e pela
temperatura, o mesmo derreterá e será soldado ao componente e 5 parte de co-re da placa# Esse
processo é mostrado na "igura ##
Figura # 4oldagem do "otoresistor na placa
)?+ "na.ação da con6tr*ção do C<re,ro do Ro,7
Ap6s ter esse la)out e0portado para !$F, o ar7uivo "oi impresso usando uma impressora
5 laser em um papel "otográ"ico Lrecomenda*se papel gloss ou couchI, apesar do gloss ser de
7ualidade superior e o circuito "oi recortado# $epois "oi trans"erido para a placa de "enolite
co-reado usando um "erro de passar roupas pelo método da trans"erIncia de calor# O processo
completo de con"ecção "oi comentado na seção anterior#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 53/101
53
$epois -astou soldar os componentes para 7ue a placa "icasse con"orme mostra a "igura
##
Figura # Cére-ro conclu.do
)?$ M-d*.o de re8*.ação de ten6ão
O microcontrolador A3Mega >@D8D "unciona com uma tensão elétrica cont.nua de N eesta deve ser constante, para 7ue o mesmo não se+a dani"icado# Os motores podem "uncionar
com tensKes um pouco mais altas e um pouco mais -ai0as 7ue este valor# Assim, em um ro-=
comum, podem ser utili?adas duas "ontes de tensão di"erentes, para atuadores Lmotores e para a
parte l6gica Lmicrocontrolador# !or este ro-= ter um tamanho redu?ido, e os motores serem de
-ai0a potIncia, "oi pre"er.vel usar uma -ateria 9nica, regulando a tensão para o microcontrolador
e para os motores, simultaneamente#
Considerando 7ue será usada uma -ateria acima de ,N Ldestas de carrinhos de
-rin7uedo comuns, "oi então escolhido um regulador de tensão para N L7ue precisa de tensão
de entrada maior ou igual a N para "uncionar corretamente e tem sa.da de até >A de corrente#
!ara o mesmo, "oi constru.do um m6dulo de regulação de tensão, 7ue permite conectar
-aterias de entrada com tensão entre e >N, ligar e desligar o ro-= usando uma chave, ver se

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 54/101
54
e0iste tensão elétrica ou não na sa.da Latravés de um 'E$ a?ul e conectar a sa.da regulada em
N, usando conectores para"usáveis de dois pinos#
O regulador de tensão usado "oi o DH, e a imagem da primeira página do datasheet do
mesmo, disponi-ili?ado online pela "a-ricante Fairchild 4emiconductor, está representada na
"igura #@#Entretanto, pode ser usado 7ual7uer outro componente de 7ual7uer outro "a-ricante,
desde 7ue o encapsulamento se+a 3O*H, para se encai0ar no la)out do circuito pro+etado#
Figura #@ !rimeira página do datasheet do componente DH#
!ara "ins didáticos, "oi constru.da uma placa pr6pria para o m6dulo regulador de tensão,
cu+a lista de componentes é mostrada na ta-ela #, e o es7uemático da mesma é mostrado na
"igura ##

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 55/101
55
3a-ela # 'ista de componentes e custo de construção do 1egulador de 3ensão
Co34onente F*antdade Loca. de co34ra C*6to UntGro C*6to Tota.1egulador de
3ensão DH>
Eletr=nica 4antos
$ummont, rua @D
LGoi<nia
1^ >,HH 1^ >,HH
Capacitor eletrol.tico >HuF
> 1^ H,HD 1^ H,HD
Capacitor
eletrol.tico
>HHuF
> 1^ H,H 1^ H,H
Conector
para"usável de
pinos
1^ H,H 1^ >,DH
$iodo >(HH> > 1^ H,>H 1^ H,>H1esistor >HP] > 1^ H,H 1^ H,H
'E$ Alto
-rilhoLa?ul> 1^ H,DH 1^ H,DH
4Qitch > 1^ >,HH 1^ >,HHTota. Re8*.ador
de Ten6ão1^ ,H
Figura # Es7uemático do M6dulo 1egulador de 3ensão
!ela "igura # é poss.vel perce-er como o circuito está organi?ado# A entrada é de a
>N, sendo um "io para tensão e outro para re"erIncia LG($# 'ogo em seguida, há uma chave
de duas posiçKes, para ligar e desligar o circuito# 2nteressante notar 7ue a chave "oi posicionada

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 56/101
56
antes do regulador de tensão e não depois# $essa "orma, o circuito não consome energia da
-ateria em modo Tstand-)T#
'ogo depois há um diodo# Ele é responsável por não permitir a passagem de corrente
negativa Lsentido inverso pelo regulador de tensão, pois isso o dani"ica# Assim, e0iste essa
prevenção para 7ual7uer pessoa 7ue porventura ligue os p6los invertidos da -ateria no conector
para"usável de entrada#
Em paralelo com o regulador de tensão DH "oram colocados dois capacitores
eletrol.ticos, um de >HHuF e outro de >HuF# Eles são responsáveis por "iltrar ru.dos elétricos#
'ogo ap6s o capacitor de >HHuF, está um resistor de >HP] em série com um 'E$ indicador de
alto -rilho, para indicar se o circuito está ou não ligado# 'ogo ap6s está a sa.da do circuito, +á
regulada para N#
Ap6s o desenho do es7uemático desse circuito, "oi reali?ado o la)out da placa con"orme a"igura #D#
Figura #D 'a)out do m6dulo 1egulador de 3ensão#
!osteriormente, o mesmo la)out "oi e0portado para o "ormato !$F, e monocromático,
con"orme mostra a "igura ##
Figura # 'a)out do m6dulo 1egulador de 3ensão em !$F#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 57/101
57
Com este circuito em mãos, "oi reali?ada a trans"erIncia da tinta para a placa de "enolite
co-reado, da mesma "orma 7ue "oi "eita com o m6dulo Cére-ro# A placa "inali?ada pode ser
visuali?ada na "igura #H#
Figura #H M6dulo regulador de tensão "inali?ado#
Con"orme mostra a "igura #>>, "oram usados "ios longos para se ligar a chave de liga*
desliga, para 7ue, caso o m6dulo "osse inclu.do dentro de uma cai0a de acr.lico, por e0emplo, o
-otão pudesse "icar na parte e0terna da cai0a# Foram usados conectores para"usáveis de pinos
para poder "acilitar a ligação da -ateria 5 entrada e do m6dulo do Cére-ro 5 sa.da, tornando o Pit
mais didático#
CA1TULO VI

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 58/101
58
+ De6en;o.;3ento e con6tr*ção do6 6en6ore6 do ro,7
+?% Introd*ção
!ara 7ue o ro-= responda ao am-iente, antes é preciso 7ue ele perce-a este am-iente de
alguma maneira# 2sto é "eito usando sensores# E0istem vários tipos di"erentes de sensores, cu+o
princ.pio é sempre o mesmo tradu?ir uma variável do meio em algo 7ue o ro-= entenda# (o caso
do ro-= seguidor de linha, o o-+etivo é perce-er ausIncia ou presença de linha Luma linha de "ita
isolante preta em um "undo -ranco, por e0emplo, para 7ue ele responda con"orme isso#
O sensor desenvolvido, para "ins práticos e econ=micos consiste em um divisor de tensão
usando um "otoresistor e um resistor# O "otoresistor varia sua resistIncia entre >HH] e @P],
dependendo da luminosidade 7ue incide so-re ele# !orém, no caso deste ro-= em particular, a lu?
será pro+etada so-re o plano e a 7uantidade re"letida será captada pelo "otoresistor# $essa "orma,
é posicionado um 'E$ do lado do "otoresistor, e -aseado na lu? 7ue é re"letida do plano so-re
ele, a tensão do circuito divisor de tensão varia proporcionalmente#
O circuito geral do princ.pio de divisor de tensão com "otoresistor e 'E$ acoplado é
mostrado na "igura @#>#
Figura @#> Es7uemático do circuito divisor de tensão e 'E$ acoplado
O 'E$ é ligado em N compartilhando a mesma re"erIncia 7ue o restante do circuito
LG($, sendo 7ue um resistor de H] é inserido em série para limitar a corrente 7ue atravessa
o 'E$, a "im de 7ue o mesmo não se+a dani"icado# X montado então o circuito divisor de tensão,

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 59/101
59
em 7ue a tensão 7ue aparecerá em OU3 é proporcional aos valores de resistIncia do "otoresistor
e do resistor de >HP], segundo a e7uação @#>#
V out = 10kΩ
10kΩ+ Rfotoresistor
∙5 (V )
L@#>
$essa "orma, caso a luminosidade "or má0ima, o valor de Rfotoresistor será igual a >HH],
sendo Nout ` ,N# Caso a luminosidade "or m.nima, o valor de Rfotoresistor será de @P],
sendo Nout ` H,@N# Entretanto, esses valores são ideais# (a prática, será necessário criar uma
"unção para 7ue o microcontrolador arma?ene os valores má0imos e m.nimos de luminosidade
re"letida da lu? na linha e ausIncia de linha, sempre 7ue iniciali?ar# Mais detalhes serãoa-ordados no cap.tulo #
+?' 1roeto do6 6en6ore6
!ara economi?ar espaço nas placas dos sensores e "acilitar a soldagem, o resistor de >HP]
do divisor de tensão "oi posicionado na placa do cére-ro do ro-=, con"orme mostrado no cap.tulo
anterior# A 9nica di"erença para o es7uemático do t6pico anterior, é 7ue nesse circuito "oi
inserido um capacitor de pF para "iltrar oscilaçKes indese+adas do "otoresistor# O motivo denão ter sido usado um potenci=metro de cali-ração em ve? do resistor de resistIncia "i0a de
>HP], "oi a redução de custo e comple0idade do circuito, além de se optar por uma estratégia de
cali-ração mais precisa 7ue o potenci=metro# $essa "orma é necessário cali-rar os sensores via
so"tQare#
Os dois sensores "oram pro+etados de "orma idIntica, a "im de dei0ar o ro-= o mais
simétrico poss.vel# $essa "orma, este cap.tulo a-orda a construção de um sensor# A ta-ela @#>
mostra a lista de componentes usados na construção dos sensores en7uanto 7ue a "igura @#mostra o es7uemático do sensor, +untamente com a cone0ão do divisor de tensão +unto ao
microcontrolador#
3a-ela @#> 'ista de componentes e custo de construção dos sensores
Co34onente F*antdade Loca. de co34ra C*6to UntGro C*6to Tota.

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 60/101
60
Fotoresistor
Eletr=nica 4antos
$ummont, rua @D
LGoi<nia
1^ H,H 1^ >,HH'E$ alto -rilho
L-ranco 1^ >,HH 1^ ,HH
1esistor H] H,H 1^ H,>HConector
para"usável de
pinos
1^ >,H 1^ ,HH
Tota. Sen6ore6 1^ @,>H
Figura @# Es7uemático do sensor +unto ao microcontrolador
Ap6s ser reali?ado o pro+eto do circuito, "oi desenhado o circuito a ser impresso na placa
de "enolite co-reado, isto é, "oi "eito o la)out# !ara o la)out dos sensores, "oi pensado o mesmo
em relação a o la)out do cére-ro "oi usada apenas uma camada, e nenhum +umper# O circuito
"icou tão compacto 7ue a soldagem do mesmo é a etapa mais simples de todo o pro+eto do ro-=
seguidor de linha# A "igura @# mostra o la)out do sensor#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 61/101
61
Figura @# 'a)out do sensor
Ap6s essa etapa, o circuito "oi e0portado para o "ormato !$F como mostra a "igura @##
Figura @# 'a)out do sensor em !$F#
O mesmo processo reali?ado para o Cére-ro do ro-=, tam-ém "oi usado para o sensor# O
mesmo "oi impresso usando uma impressora a laser, recortado, e a tinta do papel "oi trans"erida
para a placa de "enolite co-rado usando um "erro de passar roupas# Ap6s isso, o co-re da placa
"oi corro.do usando uma solução de percloreto de "erro# !osteriormente "oram soldados os
componentes, de "orma 7ue os sensores "icassem como mostra a "igura @##
Figura @# 4ensores conclu.dos

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 62/101
62
Os resistores possuem cores de cer<mica di"erente, mas am-os correspondem a H]#
Foi usado um pedaço de ca-o termoretrátil para servir de encapsulamento para o "otoresistor#
2sso "oi preciso para 7ue a lu? am-iente não inter"erisse na detecção da linha na super".cie,
otimi?ando o pro+eto# Os 'E$ usados são de alto -rilho e da cor amarela# E "oram usados os
mesmo conectores do cére-ro do ro-= conectores para"usáveis de pinos, para permitir ao
mesmo tempo 7ue os ca-os "i7uem -em presos e o Pit de ro-6tica "i7ue "ácil de montar e
desmontar, -astando uma chave de "enda pe7uena para desconectar os ca-os#
+?0 1ro8ra3ação do6 6en6ore6
!ara "acilitar o entendimento progressivo do 7ue cada parte do ro-= "a?, vários pedaços
de c6digo serão mostrados nos cap.tulos, con"orme a parte de hardQare "or sendo conclu.da# A
parte do Cére-ro do 1o-= e do 1egulador de 3ensão não tiveram pedaços de c6digo espec."ico,
primeiro, por7ue a parte re"erente ao cére-ro será dividida neste e no pr60imo cap.tulo, de "orma
entrelaçada, e segundo, por7ue a parte do regulador de tensão não precisa de c6digo#
Vuanto aos sensores, é interessante notar 7ue o sinal de entrada rece-ido por eles é
anal6gico# Assim, é necessário convertI*los para digital# O sensor da es7uerda "oi conectado ao
pino do conversor anal6gico*digital em-utido, en7uanto 7ue o sensor da direita "oi conectado
ao pino H do mesmo# $essa "orma, "oram criadas duas variáveis para rece-er a entrada destes
dois sensores, T4ensorEs7T e T4ensor$irT# Foi tam-ém atri-u.da 5 variável T4ensorEs7T o valor
, e 5 variável T4ensor$irT, o valor H# 'em-rando 7ue essas duas variáveis são do tipo inteiro,
portanto "oi inclu.da antes da declaração delas a e0pressão TintT#Essa declaração inicial "oi "eita
para "acilitar o entendimento do c6digo, 7uando tais variáveis "orem chamadas pela "unção
responsável pela leitura anal6gica dos sensores# Até o momento então, nosso c6digo está como
mostra a "igura @#@, devidamente comentado Lcomentários aparecem ap6s os caracteres T88T#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 63/101
63
Figura @#@ !rimeira parte do c6digo dos sensores
Como visto na "igura @#@, "oram apenas declaradas as variáveis responsáveis por
captarem os valores dos sensores da es7uerda e direita e atri-u.das os valores re"erentes aos pinos do conversor anal6gico Lem-utido no A3Mega D 5 7ual estão conectadas# Essas
variáveis "oram declaradas no in.cio do programa por serem variáveis glo-ais, podendo ser
usadas tanto dentro das "unçKes Tvoid setupLT como Tvoid loopLT#
(ão será preciso declarar o modo dos pinos do conversor anal6gico*digital dentro da
"unção Tvoid setupLT, con"orme "oi mostrado em relação ao pino >, no cap.tulo , por7ue estes
pinos são naturalmente de entrada# Entretando, "oi escrita a "unção T4erial#-eginL@HH[T para
iniciar a comunicação serial entre a placa Arduino e o computador Lna velocidade de @HH -ps#
2sso é vanta+oso para correção de erros, e a7ui "oi usado para perce-er se a "ai0a de recepção dos
sensores era e7uivalente# O c6digo então "ica con"orme a "igura @##
Figura @# 4egunda parte do c6digo dos sensores

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 64/101
64
Agora, é "eita a leitura dos dois sensores usando as "unçKes Tanalog1eadL4ensorEs7[T e
Tanalog1eadL4ensor$ir[T dentro da "unção Tvoid loopLT e atri-uindo tais valores 5s variáveis
Tes7T e TdirT, do tipo inteiro, 7ue agora são escritas no in.cio do programa, a-ai0o das variáveis
T4ensorEs7T e T4ensor$irT, como mostra a "igura @#D#
Figura @#D 3erceira parte do c6digo dos sensores
!or "im, apenas para critério de análise dos sensores, no sentido de ver se a resposta dosmesmos é e7uivalente, é inserida ap6s a leitura dos dois pinos anal6gicos algumas "unçKes
re"erentes 5 mostrar na tela através de comunicação serial, o valor rece-ido pelos sensores,
con"orme mostra a "igura @##

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 65/101
65
Figura @# Jltima parte do c6digo dos sensores
Assim, essa 9ltima parte da impressão dos valores na tela é reali?ada a cada dois
segundos, apenas para se ter certe?a se os sensores estão cali-rados "isicamente# Em uma etapa posterior do pro+eto esse pedaço de c6digo é retirado, sendo inserida uma "unção para cali-rar os
sensores# Além disso, a leitura dos sensores é processada e enviada aos drivers dos motores#
Maiores detalhes serão a-ordados nos cap.tulos su-se7bentes#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 66/101
66
CA1TULO VII
$ De6en;o.;3ento e con6tr*ção do 66te3a de .oco3oção do ro,7
$?% Introd*ção
!ara 7ue o ro-= ande so-re uma linha, é preciso 7ue ele possua algum sistema de
locomoção# !odem ser usadas pernas com +unçKes de servo motores simulando as articulaçKes,
motores com pás para 7ue ele se locomova na água e hélices para 7ue ele se locomova no ar, por
e0emplo#
(o caso deste ro-= seguidor de linha, "oi usado dois motores de corrente cont.nua LCC,duas rodas e dois drivers para compor o sistema de locomoção# Cada um destes itens será
e0plicado com detalhes neste cap.tulo, -em como o princ.pio 7ue rege a locomoção do ro-=#
$?' O S6te3a de Dreção D2erenca.
!ara este ro-= seguidor de linha, "oi escolhido o sistema de direção di"erencial para
pro+etar a locomoção do ro-=# Com este princ.pio, é poss.vel "a?er com 7ue o ro-= se locomova
para "rente e para os lados, usando apenas dois motores, duas rodas e uma roda -o-a L7ue
acompanha a direção das outras duas# Este ro-= não consegue andar para trás, por7ue não "oi
pro+etado um driver espec."icio para isso, como uma ponte* por e0emplo# Entretanto, no caso
da utili?ação desta, o ro-= pode dar ré usando o mesmo princ.pio da direção di"erencial#
!ara 7ue o ro-= se locomova para "rente, -asta 7ue as duas rodas girem ao mesmo tempo
e com a mesma intensidade, e para 7ue isso ocorresse de "orma homogInea o ro-= "oi pro+etado
de "orma simétrica os drivers, motores e rodas de cada lado são idInticos# Essa con"iguração
está mostrada na "igura #>#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 67/101
67
Figura #> $ireção di"erencial * andar para "rente
!ara 7ue o ro-= se locomova para a es7uerda, é preciso "rear e parar a roda da es7uerda e
continuar movimentando a da direita, con"orme mostra a "igura ##
Figura # $ireção di"erencial * andar para es7uerda
!or "im, para 7ue o ro-= se locomova para a direita, é preciso "rear a roda da direita e
continuar movimentando a da direita, con"orme mostra a "igura ##

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 68/101
68
Figura # $ireção di"erencial * andar para direita
!or se tratar de um ro-= seguidor de linha aut=nomo, e não de um carrinho de controle
remoto, por e0emplo, essa alternação entre os movimentos da roda não é aleat6ria, nem está
su+eita ao controle de ninguém, mas sim está sincroni?ada com a veri"icação da linha e ausIncia
de linha reali?ada pelos sensores, pelo processamento do microcontrolador e pela resposta dada
por ele aos drivers# Os drivers dos motores CC serão a-ordados no pr60imo t6pico, en7uanto 7ue
a l6gica e processamento do microcontrolador serão a-ordados no t6pico logo em seguida a este #
$?0 De6en;o.;3ento e con6tr*ção do6 dr;er6 do6 3otore6 CC
Com apenas a corrente elétrica 7ue sai de cada porta do microcontrolador, seria inviável
controlar os dois motores CC 7ue "a?em o ro-= andar# Então, a estratégia adotada "oi utili?ar
drivers, para ampli"icar a corrente da sa.da do microcontrolador#
O componente principal desse driver é um transistor darlington 32! >H# O circuito
elétrico interno do mesmo é mostrado na "igura #, 7ue representa a primeira página do
datasheet deste, dispon.vel online pela empresa Fairchild 4emiconductor# !orém, é poss.vel usar 7ual7uer outro componente 32! >H de 7ual7uer outro "a-ricante# Ainda poderia ser usado outro
transistor 7ue respondesse as condiçKes dessa placa, como corrente de acionamento dos motores
maior 7ue HmA, tensão de entrada nos motores de apro0imadamente N, e corrente de e0citação
do transistor de no má0imo HmA#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 69/101
69
Figura # Circuito interno 32! >H#
Apesar de este componente ser o principal do driver dos motores, "oi desenvolvido umm6dulo espec."ico para este "im, para "acilitar a modulari?ação do ro-= e tornar assim o Pit de
ro-6tica mais didático# A ta-ela #> mostra os custos da construção dos driver en7uanto 7ue o
es7uemático dos drivers está mostrado na "igura #, lem-rando 7ue os dois drivers Lum para
cada motor são idInticos, com o mesmo o-+etivo para com os sensores tornar o ro-= simétrico#
3a-ela #> 'ista de componentes e custo de construção dos drivers dos motores
Co34onente F*antdade Loca. de co34ra C*6to UntGro C*6to Tota.32! >H
Eletr=nica 4antos
$ummont, rua @D
LGoi<nia
1^ >,H 1^ ,H1esistor >] 1^ H,H 1^ H,>H
$iodo >(HH> 1^ H,>H 1^ H,HConector
para"usável
pinos
1^ >,H 1^ ,HH
Conector
para"usável
pinos
1^ H,H 1^ >,DH
Tota. Dr;er6 RH $)

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 70/101
70
Figura # Es7uemático drivers dos motores#
Em-ora todas as "ontes de compra de componentes se re"iram 5 Eletr=nica 4antos
$ummont, não "oi "eito com a intenção de gerar nenhum patroc.nio para a empresa# O 7ue ocorre
é 7ue a média de coponentes eletr=nicos em Goi<nia é -asicamente constante, sendo 7ue alguns
componentes são mais caros em umas lo+as e mais -aratos em outras# Então "oi "eita a re"erIncia
a essa lo+a por esta possuir uma grande 7uantidade e variedade de componentes eletr=nicos,
sendo uma -oa opção para 7ual7uer iniciante em eletr=nica 7ue 7ueira comprar componentes em
Goi<nia# Entretanto, para se encontrar componentes realmente -aratos e com variedade muito
superior aos encontrados em Goi<nia, recomenda*se importar da China, através de meios como
$eale0treme e eBa), +á mencionados anteriormente#Assim, os sinais enviados pelo microcontrolador ativarão a -ase do transistor 32! >H#
L7ue, apesar de ser um transistor $arlington, está representado como um transistor simples no
es7uemático acima# $essa "orma, será poss.vel controlar a corrente 7ue atravessa o motor,
por7ue é a mesma 7ue atravessa o emissor e o coletor do 32! >H# Um diodo "oi colocado entre o
coletor e o emissor do transistor para 7ue permitisse a circulação da corrente residual, gerada em
sentido contrário pelo chaveamento do motor# Um resistor pe7ueno L>] "oi posicionado entre a
a porta do microcontrolador 7ue emitirá sinais !&M e a -ase do transistor apenas para 7ue a
ligação não "osse direta, e com intenção de limitar a corrente, podendo ser su-stitu.do por um
resistor maior, sem alteração signi"icativa do pro+eto L-astando desoldar este e soldar outro
resistor#
Ap6s o pro+eto do es7uemático do circuito, "oi desenhado o la)out deste usando tam-ém
o so"tQare EAG'E# A "igura #@ mostra o la)out do driver do motor#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 71/101
71
Figura #@ 'a)out do driver do motor
Este la)out "oi reali?ado usando os mesmos princ.pios dos outros m6dulos Facilitar a
con"ecção da placa e a soldagem dos componentes# (este la)out não é necessário colocar
nenhum +umper# Ap6s esse processo, "oi reali?ada a impressão monocromática do circuito,
usando uma impressora 5 laser# A "igura # mostra o ar7uivo em !$F deste circuito#
Figura # 'a)out do driver em !$F#
Ap6s a impressão desde la)out em papel couchI, o mesmo "oi recortado e o desenho "oitrans"erido para a placa de "enolite co-reado, con"orme os m6dulos anteriores# $epois, "oram
soldados os componentes, con"orme mostra a "igura #D#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 72/101
72
Figura #D $rivers dos motores conclu.dos#
(esta "igura #D é poss.vel ver o resistor e o diodo pr60imos ao 3ransistor $arligton 32!
>H, no centro da placa# (a e0tremidade in"erior, e0iste um conector para"usável de trIs pinos,
sendo o primeiro correspondente ao G($ L1e"erIncia, o segundo para entrada do sinal !&M
Lprovidenciado por um dos conectores presentes na placa e o terceiro para alimentação de N#
(a e0tremidade superior, pode ser visto um conector para"usável de dois pinos, para
conectar o motor CC# !ara inverter o sentido de rotação dos motores Lem caso de cone0ão
errada, -asta inverter os "ios e religar ao conector para"usável#
$?( 1ro8ra3ação do6 3otore6
Finalmente, para 7ue os drivers "uncionem corretamente em relação aos sernsores, é
preciso programar o microcontrolador A3Mega D pensando na integração entre eles# O c6digo
para a programação dos sensores será continuado a7ui, para a programação dos drivers8motores#
2niciaremos a partir da "igura @#D, a-ordada no cap.tulo anterior e transposta para a7ui com o
nome de "igura # e chamada de Tin.cio da programação dos motoresT#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 73/101
73
Figura # 2n.cio da programação dos motores
O primeiro passo a7ui é declarar as variáveis 7ue acionarão os dois motores# O detalhe
mais interessante a se notar a7ui é 7ue a pinagem do Arduino é di"erente da pinagem do A3Mega
D# 2sso signi"ica 7ue o pino > usado para acender o 'E$ da placa Arduino Le o mesmo usado
na programação não é o pino > do microcontrolador A3Mega >@D8D, e sim o ># A "igura
#>H mostra as e7uivalIncias entre os pinos do microcontrolador e da programação#
Figura #>H E7uivalIncias entre A3Mega>@D8D e Arduino

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 74/101
74
$essa "orma, con"orme a "igura #, os motores estão ligados nos pinos > e >@ do
A3Mega D# O motor da es7uerda está ligado no pino > e o motor da direita está ligado no
pino >@# !orém, segundo a "igura #>H, o pino > e7uivale ao pino digital @ e o pino >@ e7uivale
ao pino digital >H na programação do Arduino# Assim, "oram declaradas duas variáveis,
MotorEs7 e Motor$ir, para controlar os motores# Essas duas variáveis "oram declaradas no in.cio
do c6digo, para servirem de variáveis glo-ais, e dentro da "unção Tvoid setupLT, "oram
declaradas como pinos de sa.da# A "igura #>> mostra o c6digo geral com estes procedimentos
inseridos#
Figura #>> C6digo com a declaração dos Motores
Ap6s a declaração destas variáveis, "oram criadas trIs "unçKes para coordenar o"uncionamento dos motores# 2n"eli?mente não "oi poss.vel controlar os motores por !&M, como
previsto inicialmente# Entretanto, "oi criado um T!&M "orçadoT, -aseado no tempo em 7ue o
motor "icou ligado e no tempo em 7ue ele "icou desligado# E0istem apenas estados 7ue o ro-=
deve e0ecutar para 7ue o mesmo ande so-re a linha#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 75/101
75
O primeiro estado é para girar am-as as rodas ao mesmo tempo, caso o ro-= identi"i7ue a
linha, para 7ue o mesmo siga reto# !ara essa situação "oi criada a "unção
TAndar!araFrenteLT#Caso encontrar uma curva para a es7uerda, o motor da direita deve girar e o
motor da es7uerda deve "icar estático# !ara isso "oi criada a "unção TAndar!araEs7uerdaLT# (o
9ltimo caso, "oi criada a "unção TAndar!ara$ireitaLT, e caso o ro-= encontre uma curva para a
direita, essa "unção deve ser chamada# Esta 9ltima "a? o motor da es7uerda girar e o da es7uerda
parar#
A "igura #> mostra o c6digo das "unçKes TAndar!araFrenteLT, TAndar!araEs7uerdaLT
e TAndar!ara$ireitaLT#
Figura #> $eclaração das "unçKes para comandar os trIs estados do ro-=
Cada uma destas trIs "unçKes chama outra# Esta segmentação do c6digo não é necessária,
mas "oi "eita para aumentar a didática e o entendimento, e tam-ém para 7ue novas trIs "unçKes
pudessem ser criadas, T$oisMotoresL[T, para acionar os dois motores ao mesmo tempo,
TMotorEs7uerdaL[T, para acionar somente o motor da es7uerda, e TMotor$ireitaL[T para acionar
somente o motor da direita# As "unçKes são do tipo void pois não retornam nada, somente
chamam a "unção 7ue está dentro delas#
A "unção T$oisMotoresL[T está mostrada na "igura #>#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 76/101
76
Figura #> Função $oisMotoresL#
Como a "unção Tanalog&riteLT não estava "uncionando para acionar os motores CC, a
sa.da "oi implementar um !&M "orçado, declarando manualmente o tempo em 7ue os motores
"icariam ligados e desligados# $essa, "orma, na "unção $oisMotoresL, os Motores Es7 e $ir são
ligados, é esperado H,> segundo, são desligados, e outro H,> segundo é esperado# $essa "orma, os
motores "icam chaveando com intervalos de H,> segundo, sempre 7ue essa "unção é chamada#
(a "igura #> é mostrada "unção MotorEs7uerdaL#
Figura #> Funcão MotorEs7uerdaL#
Essa "unção é semelhante 5 anterior, em 7ue é "eito um !&M "orçado para chavear o
motor da Es7uerda em intervalos de H,> segundo# A 9nica di"erença é 7ue essa "unção controla
apenas o motor da es7uerda#
(a "igura #> é mostrada a "unção Motor$ireitaL#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 77/101
77
Figura #> Função Motor$ireitaL#
Essa "unção reali?a o mesmo procedimento da "unção MotorEs7uerdaL# A 9nica
di"erença é 7ue ela controla o motor da direita#
O c6digo das "iguras #> a #> são inseridos ap6s a "unção void loopL, logo na
se7uIncia do c6digo mostrado na "igura #>>#
O pr60imo passo agora é sincroni?ar as "unçKes dos Estados do 1o-= com a resposta dos
sensores# 2nicialmente, "oi "eito uma medição apro0imada dos sensores usando a "unção serial do
Arduino e a linguagem !rocessing# $essa "orma, "oi visto 7ue os valores dos sensores estavam
des-alanceados, sendo 7ue o sensor da es7uerda detectava ausIncia de linha para valores digitais
acima de H e o sensor da direita detectava ausIncia de linha para valores digitais acima de HH#
Lvalores são re"erentes ao conversor anal6gico digital e vão de H a >H# $essa "orma, "oi criado
um c6digo para tomada de decisão, e o mesmo é mostrado na "igura #>@#
Figura #>@ C6digo para tomada de decisão entre sensores e motores

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 78/101
78
Entretanto, esta é de longe uma das piores "ormas de se pro+etar um ro-= seguidor de
linha, por7ue o mesmo s6 estará programado para operar em um am-iente# Fatores como
re"let<ncia da super".cie, iluminação e0terna e carga da -ateria in"luenciarão os valores rece-idos
pelos sensores, alterando a "orma do ro-= seguir a linha# !ara isso, é necessário 7ue o ro-= se
cali-re toda ve? 7ue "or iniciado, para 7ue ele se adapte a 7ual7uer am-iente# 2sso será mostrado
agora#
!ara cali-rar os sensores durante o in.cio do programa, "oi usado a "unção TmillisL[T#
3oda ve? 7ue o microcontrolador inicia, essa "unção começa a contar o tempo, em milisegundos#
A mesma será usada para 7ue o ro-= se cali-re apenas durante alguns poucos segundos, e depois
siga com o c6digo para seguir a linha# Antes, "oram criadas as variáveis Tes7Cali-T e TdirCali-T,
para arma?enar o valor dos sensores es7uerdo e direito durante a cali-ração# Esse in.cio está
mostrado na "igura #>#
Figura #> $eclaração das variáveis para cali-ração
Estas variáveis são do tipo inteiro, e "oram adcionadas o valor H as mesmas, 7ue tem a
ver com a pr60ima parte do programa#
A pr60ima etapa do programa é a cali-ração em si# A cali-ração está escrita antes de tudo
na "unção loop, pois é a primeira coisa 7ue o ro-= deve "a?er antes de iniciar# (a cali-ração, "oi
previsto um tempo de segundos para o ro-= arma?enar os valores rece-idos de cada sensor#
Esses valores serão comparados com as variáveis es7Cali- e dirCali-, e caso "orem maiores,
serão arma?enados nessas duas variáveis#
Foi por isso 7ue as variáveis es7Cali- e dirCali- "oram declaradas com valor H, pois os
valores dos sensores L7ue estarão entre H e >H, sempre serão maiores 7ue estas duas variáveis

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 79/101
79
inicialmente, e assim as variáveis es7Cali- e dirCali- rece-erão o valor correspondente da
re"let<ncia do papel sem linha# 'em-rando 7ue durante a etapa de cali-ração, os sensores
deverão estar em paralelo com um pedaço de linha reta do percurso# (a "igura #>D está
mostrado o c6digo da cali-ração dos sensores#
Figura #>D C6digo de cali-ração dos sensores
Con"orme mostra a "igura #>D, o c6digo T"orçaT os valores das variáveis es7Cali- e
dirCali- a serem sempre iguais a leitura dos sensores da es7uerda e direita do ro-=,
respectivamente# Assim, durante a etapa em 7ue o ro-= deve seguir a linha, ele sempre agirá
-aseado no valor destas variáveis da cali-ração#
Agora, será apresentado o c6digo re"erente a tomada de decisão do ro-=, -aseado na
resposta dos sensores, na "igura #>#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 80/101
80
Figura #> C6digo com os sensores e motores sincroni?ados
Este 9ltimo pedaço de c6digo conclui toda a programação do ro-= seguidor de linha#
Com os valores de es7Cali- e dirCali-, o ro-= entende 7ue está em cima da linha# Caso o sensor
da es7uerda "or menor 7ue o valor de es7Cali- *H Lpara toler<ncia, então o ro-= deve andar
para a es7uerda, visto 7ue o sensor da es7uerda está so-re a linha, indicando curva para a
es7uerda# Caso o sensor da direita estiver so-re a linha, ou se+a, com o valor dir menor 7ue
dirCali- * H Lpara toler<ncia tam-ém, o ro-= deve virar para a direita# Caso nenhum dos dois
casos se con"igure, o ro-= deve andar para "rente, pois ele supKe 7ue está so-re a linha#
Usando este c6digo, o ro-= respondeu -em durante o percurso de uma linha "i0a no chão,
e com um leve curva para a es7uerda# !orém, alguns par<metros com relação 5 velocidade dos
motores tiveram 7ue ser a+ustados# Os mesmos não serão alterados a7ui, pois o ro-= tende a se
comportar de "ormas di"erentes, até para terrenos di"erentes Limplicando um tor7ue maior nasrodas# O 7ue deve acontecer de "ato para 7ue o ro-= "uncione, é a+ustar os par<metros, até ver
7uais variáveis estão precisando ser aper"eiçoadas#
4imulando uma linha com a palma das mãos o ro-= respondeu -em, de acordo com o
c6digo, então conclui*se 7ue a l6gica está correta# O 7ue "alta é aper"eiçoar a estrutura como um
todo, para 7ue o ro-= siga 7ual7uer percurso em 7ual7uer terreno# !ode ser necessário alterar os

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 81/101
81
motores, usando uma cai0a de redução, por e0emplo, e usando tam-ém uma -ateria com maior
carga# O c6digo completo está todo dispon.vel no A(EWO#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 82/101
82
CA1TULO VIII
= Monta8e3 do ro,7 4a66o a 4a66o
=?% Introd*ção
Con"orme dito nos primeiros cap.tulos, o o-+etivo deste tra-alho é desenvolver um Pit de
ro-6tica de -ai0o custo, a "im de poder ser ministrado na "orma de curso para alunos de ensino
médio# 2sso signi"ica 7ue o Pit deve ser didático, e possi-ilitar 7ue os alunos customi?em seus
pr6prios ro-=s e ve+am a di"erença 7ue cada customi?ação possi-ilita ao resultado "inal, 7ue é
seguir uma linha em uma super".cie#
$essa "orma, "oi pensada uma maneira para 7ue os alunos pudessem encai0ar os vários
m6dulos descritos nos cap.tulos anteriores da "orma 7ue melhor lhes "ossem conveniente# Essa
"orma de customi?ação será discutida nesse cap.tulo, -em como a montagem do ro-= segundo
uma das várias "ormas de montar#
=?' 1r3ero 4rot-t4o da e6tr*t*ra
!ara 7ue o aluno con"eccionasse os m6dulos da maneira 7ue 7uisesse, seguindo sua
imaginação, "oi desenvolvido um sistema de trançar os m6dulos em uma placa principal, e para
isso "oi "eita uma matri? de "uros em uma placa de acr.lico de >0>cm e mm de espessura para
servir de suporte aos demais m6dulos# Foram usadas outras placas menores, de 0cmm e mm
de espessura, para servirem de suporte aos motores## A "igura D#> mostra a "uração completa de
uma das placas dos motores e do in.cio da "uração da placa principal#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 83/101

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 84/101
84
Figura D# Furadeira de -ancada
!osteriormente, "oram conectados o m6dulo de regulação de tensão e os sensores na
placa de acr.lico principal# A "igura D# ilustra esse procedimento, en7uanto 7ue a "igura D#
mostra a placa de uma "orma geral#
Figura D# 1egulador de tensão amarrado 5 placa de acr.lico

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 85/101
85
Figura D# 4ensores e m6dulo regulador de tensão conectados 5 placa de acr.lico
A7ui +á começam a se notar um dos primeiros pro-lemas os sensores "icaram com os
conectores para"usáveis virados para -ai0o, di"icultando a ligação dos "ios# A "igura D#@ mostra a
cone0ão dos motores 5 placa principal, perto do m6dulo regulador de tensão#
Figura D#@ Acoplagem dos motores 5 placa principal
Ap6s isso, os drivers dos motores "oram trançados na placa principal# A "igura D# mostra
como "oi trançado, en7uanto 7ue a "igura D#D mostra o resultado da cone0ão dos drivers 5 placa
de acr.lico principal#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 86/101
86
Figura D# $etalhe da cone0ão do driver 5 placa de acr.lico
(o caso deste driver, -astou um "io amarrando de um lado a outro da placa para 7ue o
mesmo "icasse "irme#
Figura D#D Cone0ão dos drivers 5 placa de acr.lico principal#
O 9ltimo passo "oi conectar o Cére-ro do ro-= e a -ateria de ,N# A "igura D# ilustra
esse procedimento#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 87/101
87
Figura D# 3odos os m6dulos conectados 5 placa de acr.lico
Essa primeira versão "icou mais estável do 7ue se imaginava inicialmente, devido aos
motores estarem des-alanceados# Entretanto, esse primeiro prot6tipo não estava otimi?ado o
-astante para 7ue "osse utili?ado para seguir a linha# Foi preciso pro+etar um sistema 7ue ligasse
os dois motores em um ei0o, e 7ue ao mesmo tempo pudesse ser movido pela estrutura de
acr.lico# Essas mudanças serão comentadas amplamente na pr60ima seção#
=?0 Se8*ndo 4rot-t4o da e6tr*t*ra
!ara este segundo prot6tipo, "oi aproveitada a idéia de amarrar as placas do Cére-ro,
1egulador de 3ensão e drivers dos motores 5 placa de acr.lico# Entretanto, os sensores e os
motores "oram para"usados, -em como uma roda -o-a 7ue "oi adicionada# A "igura D#>H mostra
como "oram conectados os motores#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 88/101
88
Figura D#>H Cone0ão alinhada dos motores
(essa nova con"iguração os motores "oram soldados em uma tira de metal, usando solda
eletr=nica comum# $epois, "oram "eitos dois "uros na tira de metal, para 7ue o ei0o dos motores
pudesse ser para"usado na placa de acr.lico# Essa nova "orma não impede 7ue os alunos
modi"i7uem o ro-=, uma ve? 7ue -asta despara"usar a estrutura dos motores e para"usar em outra
regi<o da placa# A "igura D#>> mostra uma visão de cima do acoplamento dos motores#
Figura D#>> Nisão de cima do acoplamento dos motores

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 89/101
89
Os motores "oram encai0ados nas rodas por pressão, mas antes "oi desenvolvido uma
pe7uena roda no torno mec<nico, para encai0ar as rodas do ro-= ao ei0o dos motores# A pe7uena
roda de alum.nio é mostrada na "igura D#>#
Figura D#> $etalhe de encai0e da roda no ei0o do motor
Vuanto 5 roda -o-a, "oi "eito um sistema -astante interessante# !rimeiro, "oi "eito um "uro
em um para"uso, e depois passado por ele um "io de co-re Ldestes de instalaçKes elétricas
residenciais# Com esse "io de co-re, dada a sua relativa "le0i-ilidade, "oi "eito o ei0o de uma
roda# O "ato de o "io estar dentro de um para"uso, "a? com 7ue ele gire tran7uilamente no ei0o
vertical# A "igura D#> mostra os detalhes da roda -o-a#
Figura D#> $etalhe da roda -o-a

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 90/101
90
!or "im, "oi pro+etada e constru.da uma nova con"iguração para os sensores# Con"orme a
"igura @# do cap.tulo @, o "otoresistor e o 'E$ dos sensores está virado para o mesmo lado da
placa 7ue os conectores para"usáveis de pinos# Caso isso "osse mantido, acarretaria em um
pro-lema de "acilidade de uso para o usuário "inal, dado 7ue seria muito di".cil passar conectar
os "ios entre as placas# !ara isso, os "otoresistores e os 'E$s dos sensores "oram resoldados, do
outro lado da placa Ldo lado do co-re, con"orme mostra a "igura D#>#
Figura D#> $etalhe da nova con"iguração dos sensores
Como mostrado tam-ém na "igura D#>, "oi usada solda eletr=nica para soldar o terra das
placas 5 hastes de co-re, tam-ém "eitas com "ios de instalaçKes elétricas residenciais comuns# Foi
"eito isso para 7ue "osse poss.vel para"usar os sensores 5 placa de alum.nio através de um
suporte, e 7ue ao mesmo tempo possi-ilitasse o aluno de retirar o sensor e colocá*lo em outro
lugar, para o-servar os e"eitos 7ue isso traria no desempenho "inal do ro-=# A "igura D#> mostra
como "oi para"usado as hastes dos sensores 5 placa de acr.lico#

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 91/101
91
Figura D#> $etalhe das hastes dos sensores para"usadas
!or "im, a "igura D#>@ mostra o ro-= "inali?ado, com todos os m6dulos amarrados na
placa de acr.lico, com e0cessão dos motores e dos sensores, 7ue agora estão para"usados através
de suportes, para dar maior esta-ilidade ao ro-=#
Figura D#>@ 1o-= "inali?ado

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 92/101
92
Como mostra a "igura D#>, os sensores do ro-= "icaram re-ai0ados, graças ao suporte
"eito especialmente para eles# 2sso a+uda -astante na 7uestão de diminuir a inter"erIncia da
iluminação e0terna dos sensores, além de otimi?ar o "uncionamento dos mesmos# A "igura D#>
tam-ém mostra todos os "ios conectados entre os m6dulos, e isso "oi "eito utili?ando "ios da
mesma cor, para "unçKes semelhantes Lentrada dos sensores, G($, NCC, para aumentar a
didática do ro-=# As ligaçKes "oram "eitas con"orme os es7uemáticos dos m6dulos, mostrados
nos cap.tulos anteriores#
!orém, +untamente com este tra-alho, será disponi-ili?ado todos os ar7uivos EAG'E e
!$F, para 7ue se+a poss.vel reprodu?ir e até modi"icar o ro-= constru.do a7ui, sem precisar "a?er
engenharia reversa# 3am-ém será disponi-ili?ado a TsPetchT do c6digo em Arduino#
=?( C*6to da e6tr*t*ra
Em relação ao custo da estrutura, pode se conta-ili?ar apenas a placa de acr.lico, 7ue "oi
realmente comprada# O restante do processo "oi reali?ado dentro da Escola de Engenharia
Elétrica, sem incluir nenhum custo "inal 5 construção do ro-=# Entretanto será adcionado um
valor de apro0imadamente 1^ >H,HH, re"erente ao valor das rodas, e da sucata utili?ada para
construir os suportes# O custo detalhado está mostrado na ta-ela D#>#
3a-ela D#> 'ista de componentes e custo de construção da Estrutura do 1o-=
Co34onente F*antdade Loca. de co34ra C*6to UntGro C*6to Tota.!laca acr.lico
>0>mm Lmm
espessura
> 2ndusplac 1^ H,HH 1^ H,HH
1odas e sucata
em geral* * 1^ >H,HH 1^ >H,HH
3otal Estrutura 1^ H,HH
CA1TULO IX

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 93/101
93
/ Orça3ento #era.
/?% Introd*ção
Vuando o pro+eto do Pit de ro-6tica de -ai0o custo ainda era uma idéia durante uma
reunião de !es7uisa e $esenvolvimento na sede da E'O Engenharia %9nior, "e?*se uma média de
7uanto deveria custar o Pit de ro-6tica# 2sto é, com o -ai0o orçamento destinado a esse pro+eto,
e0istia a real preocupação em se gastar o menos poss.vel para construir cada Pit de ro-6tica# A
idéia era de 7ue o ro-= não deveria custar mais de 1^ HH,HH para 7ue considerasse realmente
um Pit de ro-6tica de -ai0o custo#
(este cap.tulo será apresentado o valor total para se construir esse Pit de ro-6tica de
-ai0o custo, -em como e0plicaçKes de como "a?er para se gastar menos ainda, com a construção
de uma versão melhorada#
/?' C*6to tota. de con6tr*ção do ro,7
Com -ase nas ta-leas apresentadas nos cap.tulos anteriores, e reunindo os valores totais
das mesmas em uma ta-ela 9nica, temos a ta-ela geral de custos do ro-=, representada na ta-ela#>#
3a-ela #> 3a-ela geral de custos do ro-=
M-d*.o C*6to
C<re,ro RH )0')
Re8*.ador de ten6ão RH )0
Sen6ore6 RH +%
Dr;er6 RH $)
E6tr*t*ra RH 0C*6to Tota. RH %%==
Con"orme pode ser visto, o orçamento está -em a-ai0o do valor ideali?ado inicialmente,
sendo 7ue de 1^ HH,HH caiu para 1^ >H>,DD# O valor real está ainda mais -ai0o 7ue este, visto
7ue "oram adcionados alguns valores a mais durante o processo, re"erentes a compra de placas de

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 94/101
94
"enolite co-reado a mais, por7ue algumas estragaram durante o processo de aprendi?agem e com
a preci"icação da sucata, 7ue pode ser considerada Tde graçaT, em uma análise mais pr60ima da
realidade#
Assim, pode se di?er 7ue o custo total do ro-= está Tpor volta de 1^ >HH,HHT, 7ue é
praticamente a metade do valor pensado inicialmente, e muito mais -arato 7ue outros Pits iniciais
7ue se compram no mercado#
Nale salientar, entretanto, 7ue em-ora o ro-= constru.do nesse tra-alho tenha uma
"le0i-ilidade considerável, várias melhorias precisam ser "eitas para 7ue ele se+a um Pit de
ro-6tica comercial# !orém, podem ser constru.dos ro-=s 7ue desviam de o-stáculos e ro-=s 7ue
seguem a lu? L"ot6voros, apenas trocando os sensores, sem modi"icar o restante dos m6dulos ou
da estrutura#
O custo do pro+eto aumentaria -astante, caso tivéssemos 7ue comprar todas as"erramentas utili?adas gratuitamente na Universidade, e diminuiria tam-ém, caso "ossem
utili?ados outros materiais, como papelão prensado, em "e? da placa de acr.lico para "a?er a
estrutura
/ Conc.*6ão

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 95/101
95
O resultado do tra-alho "oi -astante satis"at6rio, provando ser poss.vel construir Pits
didáticos de ro-6tica de maneira simples e -arata, utili?ando a plata"orma de prototipagem de
eletr=nicos open*source e open*hardQare, Arduino# 2sso prova tam-ém 7ue a plata"orma Arduino
é ideal para reali?ar pro+etos de computação ".sica, relacionados ou não 5 ro-6tica, pois tem uma
ampla comunidade online 7ue está sempre desenvolvendo pro+etos e apresentando as soluçKes e
tam-ém por ser acess.vel "inanceiramente# Espera*se 7ue com este tra-alho, outros alunos se
interessem em "a?er pro+etos usando Arduino# Vuanto ao Pit de ro-6tica de -ai0o custo, "oi
atingida a proposta inicial, 7ue era de construir um ro-= customi?ável, e 7ue "osse acess.vel para
se implementar em escolas p9-licas de ensino médio# $everão ser "eitos vários aper"eiçoamentos
para 7ue o ro-= "i7ue otimi?ado para ser apresentado como um Pit comercial, porém o passo
inicial +á "oi dado a construção do primeiro prot6tipo "uncional# Este tra-alho continuará a ser
amplamente melhorado, através do pro+eto de e0tensão TEngenharia nas EscolasT da UFG#
RE"ER>NCIAS

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 96/101
96
Y>ZUFMG# Curso de !rogramação em C, dispon.vel emhttp!!"""2#d$$#u%&g#'r!dis$ip(inas!p$!sour$e!introdu$ao)$)renato$&)deeu%&g#pd% # Acesso em H8>8H>>#
YZ 1odrigo Calvos, 1aul Ale+os# Arduino $ocumentar) dispon.vel emhttp!!*i&eo#$o&!18539129+ut&)$a&paign,a*a(on1982-ut&)&ediu&,t"itter-ut&)sour$e,a&6)%eedt"eetA$esso e& 04!12!2011
YZGoogle# Android A$ para Arduino, dispon.vel emhttp!!de*e(oper#android#$o&!guide!topi$s!us'!ad.#ht&(/ A$esso e& 04!12!2011
YZ&iPipedia# hsi$a( Co&puting http!!en#"i.ipedia#org!"i.i!hsi$a()$o&puting/A$esso e& 04!12!2011
YZBen Fr), Case) 1eas# !rocessing# http!!"""#pro$essing#org!/ A$esso e&04!12!2011
Y@Z 1o-otica#eng#com#-r# 4istema de $ireção $i"erencial http!!"""#ro'oti$a#eng#'r!Cine&ati$a#ht&/ A$esso e& 04!12!2011
YZ eBa), dispon.vel em http!!"""#e'a#$o&! Acesso em H8>8H>>
YDZ $ealE0treme, dispon.vel em http!!"""#dea(etre&e#$o&! Acesso em H8>8H>>
YZ Eletr=nica 4antos $ummont, rua @D LGoi<nia, dispon.vel em http!!"""#apontador#$o&#'r!(o$a(!go!goiania!e(etroe(etroni$os!B8G3!e(etroni$
a)santos)du&ont)setor)$entra(#ht&( Acesso em H8>8H>>#
ANEXO

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 97/101
97
C-d8o co34.eto do Ro,7 JArd*no
int 4ensorEs7 ` [ 88 Atri-ui o valor 5 variável inteira 4ensorEs7int 4ensor$ir ` H[ 88 Atri-ui o valor H 5 variável inteira 4ensor$ir
int es7[ 88 Nariável es7 para rece-er a leitura do sensor da Es7uerda
int dir[ 88 Nariável dir para rece-er a leitura do sensor da Es7uerda
int MotorEs7 ` @[ 88 Atri-ui o pino @ do Arduino 5 variável MotorEs7 LMotor
Es7uerda
int Motor$ir ` >H[ 88 Atri-ui o pino @ do Arduino 5 variável Motor$ir LMotor
$ireita
int es7Cali- ` H[
int dirCali- ` H[
void setupL
884erial#-eginL@HH[ 88 2n.cio da comunicação serial a @HH-ps
pinModeLMotorEs7, OU3!U3[ 88 $eclaração do !ino do MotorEs7 como sa.da pinModeLMotor$ir, OU3!U3[ 88 $eclaração do !ino do Motor$ir como sa.da
f
void loopL

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 98/101
98
i"LmillisL HHH
es7 ` analog1eadL4ensorEs7[ 88 leitura do 4ensorEs7 e atri-uição 5 variáveles7
dir ` analog1eadL4ensor$ir[ 88 leitura do 4ensor$ir e atri-uição 5 variável dir
i" Les7Cali- es7
es7Cali- ` es7[
f
i" LdirCali- dir
dirCali- ` dir[
f
f
else
es7 ` analog1eadL4ensorEs7[ 88 leitura do 4ensorEs7 e atri-uição 5 variável
es7
dir ` analog1eadL4ensor$ir[ 88 leitura do 4ensor$ir e atri-uição 5 variável dir
i" Les7 Les7Cali- * H
digital&riteLMotorEs7,'O&[
Andar!araEs7uerdaL[ 88 Chama a "unção Andar!raFrenteL[

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 99/101
99
f
88 Anda pra direita se o sensor es7 detectar ausIncia de linha e o dir detectar
linha
else i" Ldir LdirCali- * H 88
digital&riteLMotor$ir,'O&[
Andar!ara$ireitaL[ 88 Chama a "unção Andar!ra$ireitaL[
f
else
Andar!araFrenteL[
f
f
f
88 FunçKes de Controle dos Estados do 1o-= LFrente, $ireita e Es7uerda
void Andar!araFrenteL 88 Fa? o ro-= andar para "rente
$oisMotoresL[ 88 Chama a "unção T$oisMotoresL[T
f
void Andar!ara$ireitaL 88 Fa? o ro-= andar para $ireita
MotorEs7uerdaL[ 88 Chama a "unção TMotorEs7uerdaL[T
f

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 100/101
100
void Andar!araEs7uerdaL 88 Fa? o ro-= andar para Es7uerda
Motor$ireitaL[ 88 Chama a "unção TMotor$ireitaL[Tf
88 FunçKes de Controle dos Motores
void $oisMotoresL 88 !&M com H de potIncia no MotorEs7 e Motor$ir
digital&riteLMotorEs7,2G[ 88 'iga o MotorEs7
digital&riteLMotor$ir,2G[ 88 'iga o Motor$ir
dela)L>H[ 88 Espera H,> segundo
digital&riteLMotorEs7,'O&[ 88 $esliga o MotorEs7
digital&riteLMotor$ir,'O&[ 88 $esliga o Motor$ir
dela)L>HH[
f
void MotorEs7uerdaL 88 !&M com H de potIncia no MotorEs7
digital&riteLMotorEs7, 2G[ 88 'iga o MotorEs7 LMotor Es7uerda
dela)L>H[ 88 Espera H,> segundo
digital&riteLMotorEs7,'O&[ 88 $esliga o MotorEs7 LMotor Es7uerda dela)L>HH[
f
void Motor$ireitaL 88 !&M com H de potIncia no Motor$ir

7/21/2019 Projeto Final - TCC - Definitivo(Foco 2.0).docx
http://slidepdf.com/reader/full/projeto-final-tcc-definitivofoco-20docx 101/101
101
digital&riteLMotor$ir, 2G[ 88 'iga o Motor$ir LMotor $ireita
dela)L>H[ 88 Espera H,> segundo
digital&riteLMotor$ir,'O&[ 88 $esliga o Motor$ir LMotor $ireita dela)L>HH[ 88 Espera H,> segundo
f