Embed Size (px)
Citation preview
1
RESISTÊNCIA DOS MATERIAIS I
Gilson Finotti
Out/2015 (R64)
2
OBSERVAÇÕES INICIAIS
1ª. Esta apostila é um mero resumo de aulas para auxiliar os alunos no estudo preliminar da
disciplina. Foi baseada nos livros da Bibliografia abaixo, principalmente no livro de Beer e
Johnston (Referência 1) cuja simbologia procuramos adotar, a fim de facilitar as consultas dos
alunos. Seu objetivo é minimizar a necessidade de anotações em aulas de forma a manter, ao
máximo, a atenção dos alunos nas exposições da matéria.
Tratando-se de um mero resumo, evidencia-se a suas limitações, não eximindo, portanto, o
aluno da necessidade do estudo dos livros indicados na Bibliografia abaixo os quais enfaticamente
recomendamos.
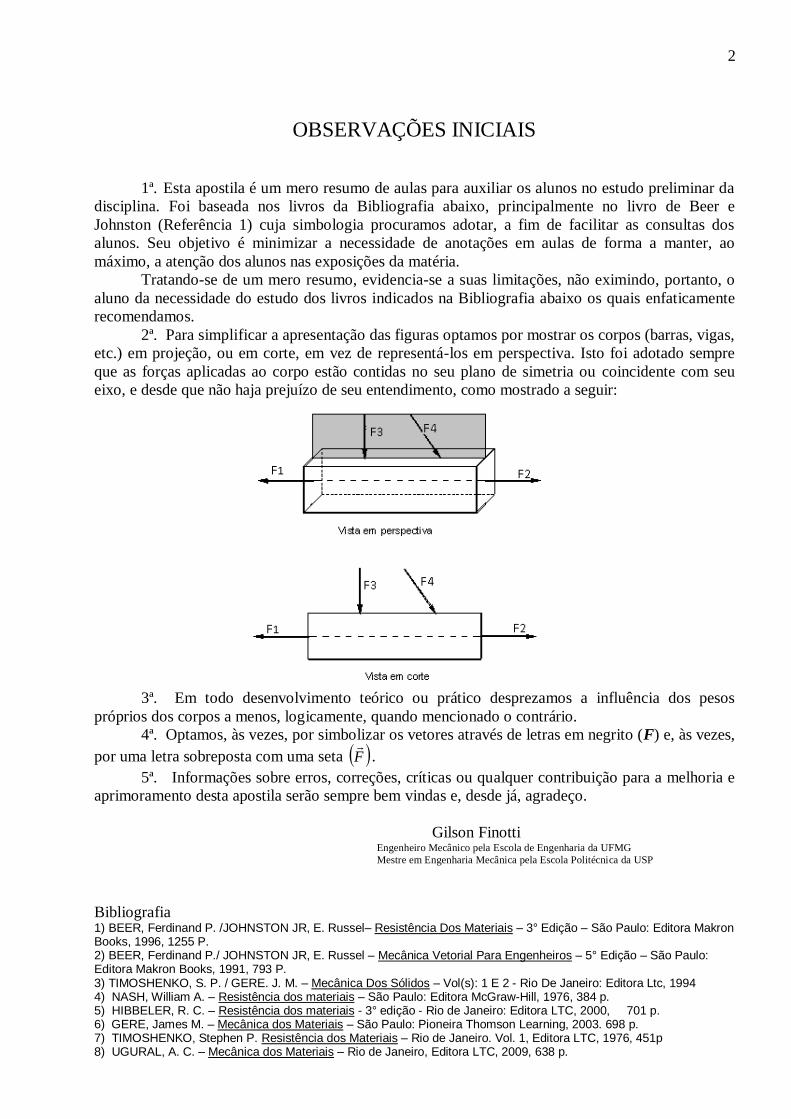
2ª. Para simplificar a apresentação das figuras optamos por mostrar os corpos (barras, vigas,
etc.) em projeção, ou em corte, em vez de representá-los em perspectiva. Isto foi adotado sempre
que as forças aplicadas ao corpo estão contidas no seu plano de simetria ou coincidente com seu
eixo, e desde que não haja prejuízo de seu entendimento, como mostrado a seguir:
3ª. Em todo desenvolvimento teórico ou prático desprezamos a influência dos pesos
próprios dos corpos a menos, logicamente, quando mencionado o contrário.
4ª. Optamos, às vezes, por simbolizar os vetores através de letras em negrito (F) e, às vezes,
por uma letra sobreposta com uma seta F
.
5ª. Informações sobre erros, correções, críticas ou qualquer contribuição para a melhoria e
aprimoramento desta apostila serão sempre bem vindas e, desde já, agradeço.
Gilson Finotti Engenheiro Mecânico pela Escola de Engenharia da UFMG
Mestre em Engenharia Mecânica pela Escola Politécnica da USP
Bibliografia 1) BEER, Ferdinand P. /JOHNSTON JR, E. Russel– Resistência Dos Materiais – 3° Edição – São Paulo: Editora Makron Books, 1996, 1255 P. 2) BEER, Ferdinand P./ JOHNSTON JR, E. Russel – Mecânica Vetorial Para Engenheiros – 5° Edição – São Paulo: Editora Makron Books, 1991, 793 P. 3) TIMOSHENKO, S. P. / GERE. J. M. – Mecânica Dos Sólidos – Vol(s): 1 E 2 - Rio De Janeiro: Editora Ltc, 1994 4) NASH, William A. – Resistência dos materiais – São Paulo: Editora McGraw-Hill, 1976, 384 p. 5) HIBBELER, R. C. – Resistência dos materiais - 3° edição - Rio de Janeiro: Editora LTC, 2000, 701 p. 6) GERE, James M. – Mecânica dos Materiais – São Paulo: Pioneira Thomson Learning, 2003. 698 p. 7) TIMOSHENKO, Stephen P. Resistência dos Materiais – Rio de Janeiro. Vol. 1, Editora LTC, 1976, 451p 8) UGURAL, A. C. – Mecânica dos Materiais – Rio de Janeiro, Editora LTC, 2009, 638 p.
3
SUMÁRIO
1 INTRODUÇÃO ....................................................................................................................... 6
2 TRAÇÃO E COMPRESSÃO .................................................................................................. 7
2.1 Tensão e deformação ......................................................................................................... 7
2.2 Unidades das tensões e deformações .................................................................................. 8
2.3 Diagrama tensão-deformação ............................................................................................ 8
2.4 Materiais dúcteis e frágeis ................................................................................................. 9
2.5 Ensaios tecnológicos de materiais ...................................................................................... 9
2.6 Lei de Hooke ................................................................................................................... 10
2.7 Tensões admissíveis e coeficientes de segurança ............................................................. 10
2.8 Dimensionamento das barras ........................................................................................... 11
2.9 Exercícios........................................................................................................................ 12
2.10 Problemas estaticamente indeterminados ..................................................................... 14
2.11 Exercícios .................................................................................................................... 15
2.12 Tensão Térmica. Influência da variação da temperatura ............................................. 17
2.13 Equações das forças normais ........................................................................................ 18
2.14 Diagrama das forças normais ....................................................................................... 19
2.15 A influência do peso próprio da barra na tração ou compressão. ................................... 19
2.16 Deformação provocada pelo peso próprio. ................................................................... 21
2.17 Superposição de efeitos ................................................................................................ 21
2.18 Deformações transversais. Coeficiente de Poisson ....................................................... 23
2.19 Exercícios .................................................................................................................... 24
3 CISALHAMENTO ................................................................................................................ 25
3.1 Solicitações transversais. Tensão de cisalhamento. .......................................................... 25
3.2 Deformação de cisalhamento ........................................................................................... 26
3.3 Exercícios........................................................................................................................ 27
4 TORÇÃO .............................................................................................................................. 29
4.1 Introdução ....................................................................................................................... 29
4.2 Tensão de cisalhamento ................................................................................................... 30
4.3 Eixo circular vazado (tubo) .............................................................................................. 31
4.4 Deformação de cisalhamento ( ) .................................................................................... 31
4.5 Ângulo de torção ( ) ...................................................................................................... 31
4.6 Exercícios........................................................................................................................ 32
4.7 Equações e diagramas do momento de torção .................................................................. 33
4.8 Exercícios........................................................................................................................ 35
4.9 Cálculo de eixo de transmissão* ...................................................................................... 36
4.10 Exercícios .................................................................................................................... 37
4
5 FLEXÃO ............................................................................................................................... 38
5.1 Vigas ............................................................................................................................... 38
5.2 Tipos de apoios das vigas ................................................................................................ 38
5.3 Tipos de carregamentos ................................................................................................... 38
5.4 Carga uniformemente distribuída ..................................................................................... 39
5.5 Carga não uniformemente distribuída .............................................................................. 39
5.6 Tipos de vigas ................................................................................................................. 39
5.7 Vigas isostáticas , vigas hiperestáticas e vigas hipostáticas .............................................. 40
5.8 Grau de hiperestaticidade ................................................................................................ 41
5.9 Reações de apoio ............................................................................................................. 42
5.10 Apoio tipo cabo flexível e haste articulada ................................................................... 45
5.11 Exercício resolvido ...................................................................................................... 46
5.12 A influência do peso próprio da viga na flexão. ............................................................ 46
5.13 Exercícios: ................................................................................................................... 47
5.14 Esforços internos nas vigas .......................................................................................... 49
5.15 Momento fletor e força cortante ................................................................................... 49
5.16 Convenção de sinais ..................................................................................................... 50
5.17 Diagramas de momentos fletores e forças cortantes ...................................................... 51
5.17.1 Diagrama de momentos fletores e forças cortantes para cargas concentradas. ........... 51
5.17.2 Diagrama de momentos fletores e forças cortantes para cargas distribuidas. ............. 53
5.18 Superposição de efeitos ................................................................................................ 55
5.19 Forças normais (N) ...................................................................................................... 56
5.19.1 Convenção de sinais ................................................................................................. 56
5.19.2 Equação das forças normais e diagramas .................................................................. 56
5.20 Exercícios resolvidos ................................................................................................... 58
5.21 Exercícios .................................................................................................................... 71
5.22 Relação entre momento fletor e força cortante.............................................................. 72
5.23 Tensões normais na flexão ........................................................................................... 74
5.24 Raio de curvatura ......................................................................................................... 76
5.25 Exercícios .................................................................................................................... 77
6 PROPRIEDADES GEOMÉTRICAS DAS FIGURAS PLANAS ........................................... 78
6.1 Momento estático (ou momento de primeira ordem) ........................................................ 78
6.2 Centro de gravidade (ou centróide) .................................................................................. 78
6.3 Exercícios........................................................................................................................ 79
6.4 Determinação do centro de gravidade (centróide) de uma área ......................................... 80
6.5 Exercícios........................................................................................................................ 83
6.6 Momento de inércia (ou momento de segunda ordem) ..................................................... 84
6.7 Raio de giração ................................................................................................................ 85
6.8 Teorema dos eixos paralelos ............................................................................................ 85
5
6.9 Exercício ......................................................................................................................... 86
6.10 Momento de inércia de uma área composta .................................................................. 86
6.11 Exercícios .................................................................................................................... 87
6.12 Tabela 1: Características Geométricas. Formulário 1 .................................................... 89
6.13 Tabela 2: Características Geométricas. Formulário 2 .................................................... 90
6.14 Tabela 3: Perfis I Padrão Americano (CSN) ................................................................. 90
6
1 INTRODUÇÃO
No curso de Mecânica, na parte referente à Estática, estudamos o equilíbrio dos corpos
rígidos. As forças então aplicadas ao corpo rígido são chamadas de forças externas, dentre as quais
estão incluídas o peso próprio do corpo e suas reações de apoio. Neste estudo os corpos foram
considerados teoricamente indeformáveis.
No nosso curso de Resistência dos Materiais, entretanto, estudaremos os corpos
deformáveis, isto é, considerando seu comportamento real. Ao estudarmos as estruturas e suas
partes levaremos em conta não somente as forças externas, mas também as forças internas.
A expressão corpo (e, às vezes, estrutura) é utilizada como termo genérico para estruturas,
barras, vigas, componentes de máquinas etc.
Enquanto as forças externas são as forças causadas pela ação de outros corpos sobre o corpo
estudado, as forças internas são as forças que mantém unidas as suas partes ou os pontos materiais
(as partículas) que formam o corpo.
As forças e momentos atuantes numa estrutura e em suas partes podem provocar sobre elas
vários efeitos tais como tração, compressão, cisalhamento, flexão, torção e flambagem. A
Resistência dos Materiais estuda estes efeitos com o objetivo de determinar as tensões e as
deformações decorrentes e, consequentemente, desenvolver a teoria básica para o projeto e
dimensionamento de estruturas e peças. É através do estudo das tensões e deformações que
conseguimos projetar uma estrutura e suas partes de maneira confiável, segura e econômica.
As forças externas podem ser classificadas em forças de superfície e forças de corpo. As
forças de superfície são forças distribuídas numa superfície do corpo pela ação de outros corpos.
Elas podem ser consideradas como forças concentradas num ponto caso a área de atuação for
relativamente pequena. Também podem ser chamadas de forças lineares (ou cargas distribuídas
lineares) se atuarem numa faixa relativamente estreita ao longo do corpo. A distribuição das forças
de superfície pode ser uniforme ou variável.
As forças de corpo são causadas por campos de força (campo gravitacional, campo
magnético, etc.) e assim atuam no corpo como um todo. Seu ponto de aplicação pode ser
considerado no centroide do corpo. No caso do campo gravitacional a força de corpo é o peso do
corpo.
Quanto à velocidade de aplicação, a força de superfície pode ser estática ou de impacto. É
estática quando a aplicação da força é feita de modo lento e gradativo até atingir seu valor final. A
força de impacto acontece quando a força é aplicada de forma instantânea.
Pode acontecer também casos onde a força é aplicada de forma alternada ou repetida.
A menos que seja mencionado o contrário, as forças de superfície aplicadas ao corpo, isto é,
as cargas, serão sempre consideradas forças estáticas em todo o texto desta apostila.
7
2 TRAÇÃO E COMPRESSÃO
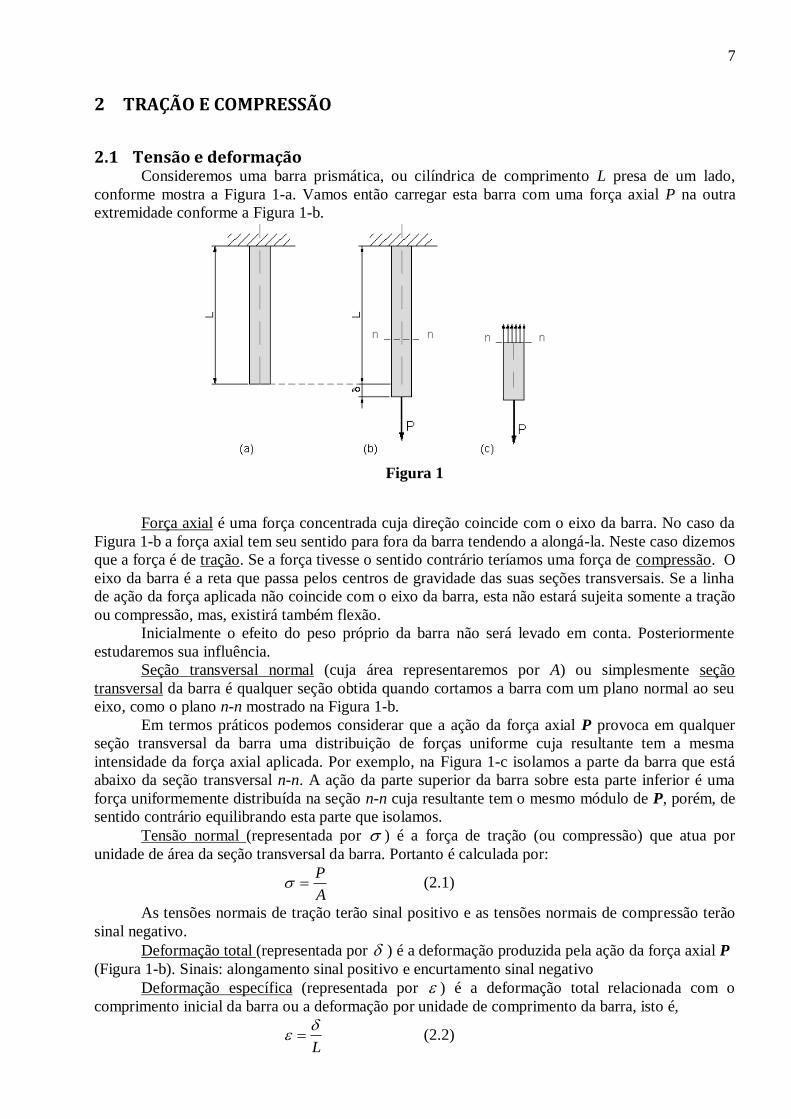
2.1 Tensão e deformação Consideremos uma barra prismática, ou cilíndrica de comprimento L presa de um lado,
conforme mostra a Figura 1-a. Vamos então carregar esta barra com uma força axial P na outra
extremidade conforme a Figura 1-b.
Figura 1
Força axial é uma força concentrada cuja direção coincide com o eixo da barra. No caso da
Figura 1-b a força axial tem seu sentido para fora da barra tendendo a alongá-la. Neste caso dizemos
que a força é de tração. Se a força tivesse o sentido contrário teríamos uma força de compressão. O
eixo da barra é a reta que passa pelos centros de gravidade das suas seções transversais. Se a linha
de ação da força aplicada não coincide com o eixo da barra, esta não estará sujeita somente a tração
ou compressão, mas, existirá também flexão.
Inicialmente o efeito do peso próprio da barra não será levado em conta. Posteriormente
estudaremos sua influência.
Seção transversal normal (cuja área representaremos por A) ou simplesmente seção
transversal da barra é qualquer seção obtida quando cortamos a barra com um plano normal ao seu
eixo, como o plano n-n mostrado na Figura 1-b.
Em termos práticos podemos considerar que a ação da força axial P provoca em qualquer
seção transversal da barra uma distribuição de forças uniforme cuja resultante tem a mesma
intensidade da força axial aplicada. Por exemplo, na Figura 1-c isolamos a parte da barra que está
abaixo da seção transversal n-n. A ação da parte superior da barra sobre esta parte inferior é uma
força uniformemente distribuída na seção n-n cuja resultante tem o mesmo módulo de P, porém, de
sentido contrário equilibrando esta parte que isolamos.
Tensão normal (representada por ) é a força de tração (ou compressão) que atua por
unidade de área da seção transversal da barra. Portanto é calculada por:
A
P (2.1)
As tensões normais de tração terão sinal positivo e as tensões normais de compressão terão
sinal negativo.
Deformação total (representada por ) é a deformação produzida pela ação da força axial P
(Figura 1-b). Sinais: alongamento sinal positivo e encurtamento sinal negativo
Deformação específica (representada por ) é a deformação total relacionada com o
comprimento inicial da barra ou a deformação por unidade de comprimento da barra, isto é,
L
(2.2)
8
2.2 Unidades das tensões e deformações No Sistema Internacional a unidade da tensão normal é o pascal, o qual é representado por
Pa que corresponde a 2mN Seus múltiplos são:
PakPa 3101 PaMPa 6101 PaGPa 9101 Nas aplicações práticas de engenharia é muito comum usar-se o Sistema Técnico, ou seja a força em
quilograma força (kgf ou simplesmente kg) e a área em 2cm . Portanto a tensão será dada em
2/ cmkgf .
Em unidades inglesas, a força P é expressa em libras ( lb ) e a área expressa em polegadas quadradas
( 2in ) e a tensão será expressa em libras por polegada quadrada (psi).
Para a deformação total sua unidade é a unidade de comprimento. No SI é, portanto,
dada em metros (m), já a deformação específica, logicamente, não possui unidade.
Exemplo:
Uma barra cuja seção transversal tem 30mm de diâmetro é tracionada por uma força axial
de 180kN. Pede-se determinar a tensão normal na barra.
Solução
26
26
22
22
10.70710
7074
)30.(
4
.m
mm
mmm
mmdA
A força sendo de tração teremos tensão de tração que é positiva, então
MPaPam
N
A
P25510.255
10.707
10.180 6
26
3
O valor de acima obtido deve ser comparado com o máximo valor de tensão à tração que
pode ser aplicado com segurança à barra, a chamada tensão admissível, representada normalmente
por adm . Desta comparação podemos verificar se a barra pode ser usada para suportar a carga de
180kN. Através de tabelas de propriedades de materiais, e Normas Técnicas, se a tensão admissível
é MPaadm 140 , concluímos que a barra feita com aquele material não pode ser usada com
segurança. Devemos, portanto, mudar o material ou aumentar seu diâmetro de modo a não
ultrapassar a tensão admissível. Desta forma o cálculo da tensão atuante numa peça serve para
dimensionarmos a peça.
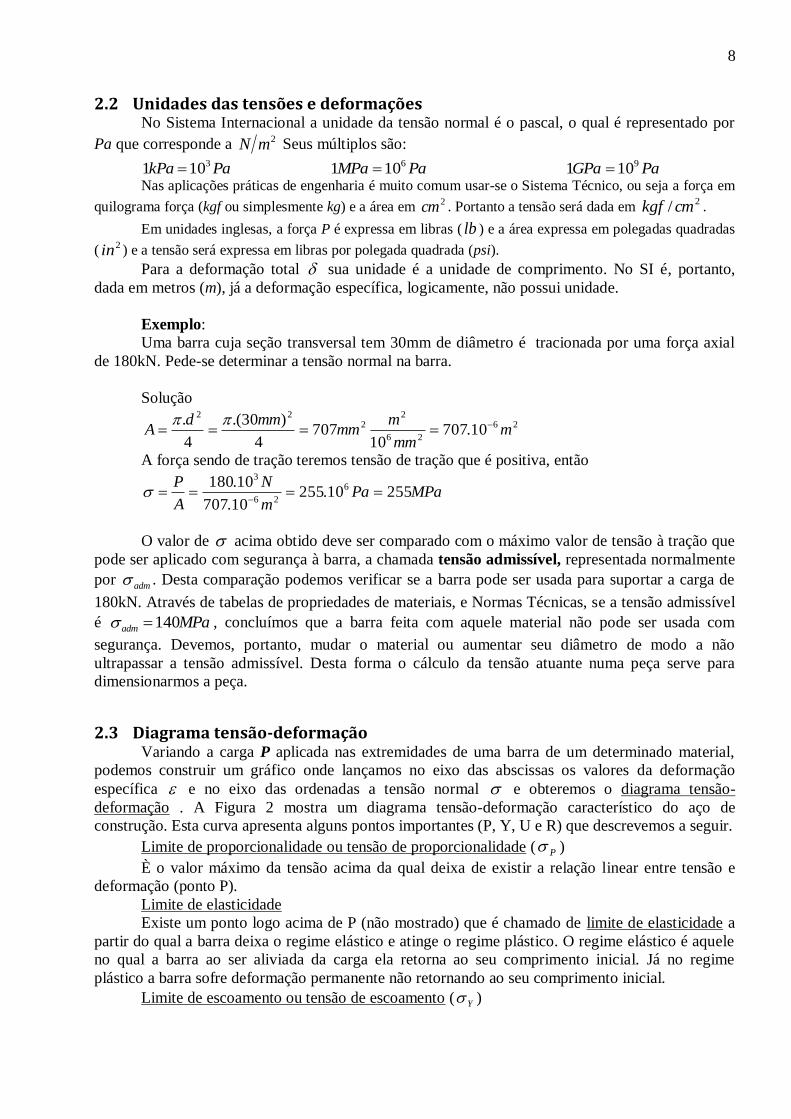
2.3 Diagrama tensão-deformação Variando a carga P aplicada nas extremidades de uma barra de um determinado material,
podemos construir um gráfico onde lançamos no eixo das abscissas os valores da deformação
específica e no eixo das ordenadas a tensão normal e obteremos o diagrama tensão-
deformação . A Figura 2 mostra um diagrama tensão-deformação característico do aço de
construção. Esta curva apresenta alguns pontos importantes (P, Y, U e R) que descrevemos a seguir.
Limite de proporcionalidade ou tensão de proporcionalidade ( P )
È o valor máximo da tensão acima da qual deixa de existir a relação linear entre tensão e
deformação (ponto P).
Limite de elasticidade
Existe um ponto logo acima de P (não mostrado) que é chamado de limite de elasticidade a
partir do qual a barra deixa o regime elástico e atinge o regime plástico. O regime elástico é aquele
no qual a barra ao ser aliviada da carga ela retorna ao seu comprimento inicial. Já no regime
plástico a barra sofre deformação permanente não retornando ao seu comprimento inicial.
Limite de escoamento ou tensão de escoamento ( Y )
9
È o valor da tensão acima do qual a deformação aumenta sem praticamente aumentar o valor
da tensão. Neste ponto diz-se que o material começa a escoar (ponto Y), isto é, mesmo sem
aumento da tensão, o material continua a se deformar até um determinado ponto.
Figura 2
Limite de resistência ou tensão última ( U )
É a maior tensão atingida no ensaio (ponto U). Depois do escoamento o material volta a
oferecer resistência e, então, para que haja deformação é necessário aumentar a tensão até um ponto
máximo (U) a partir do qual a resistência do material vai diminuindo até se romper.
Limite de ruptura ou tensão de ruptura ( R )
É a tensão onde ocorre a ruptura do corpo (ponto R).
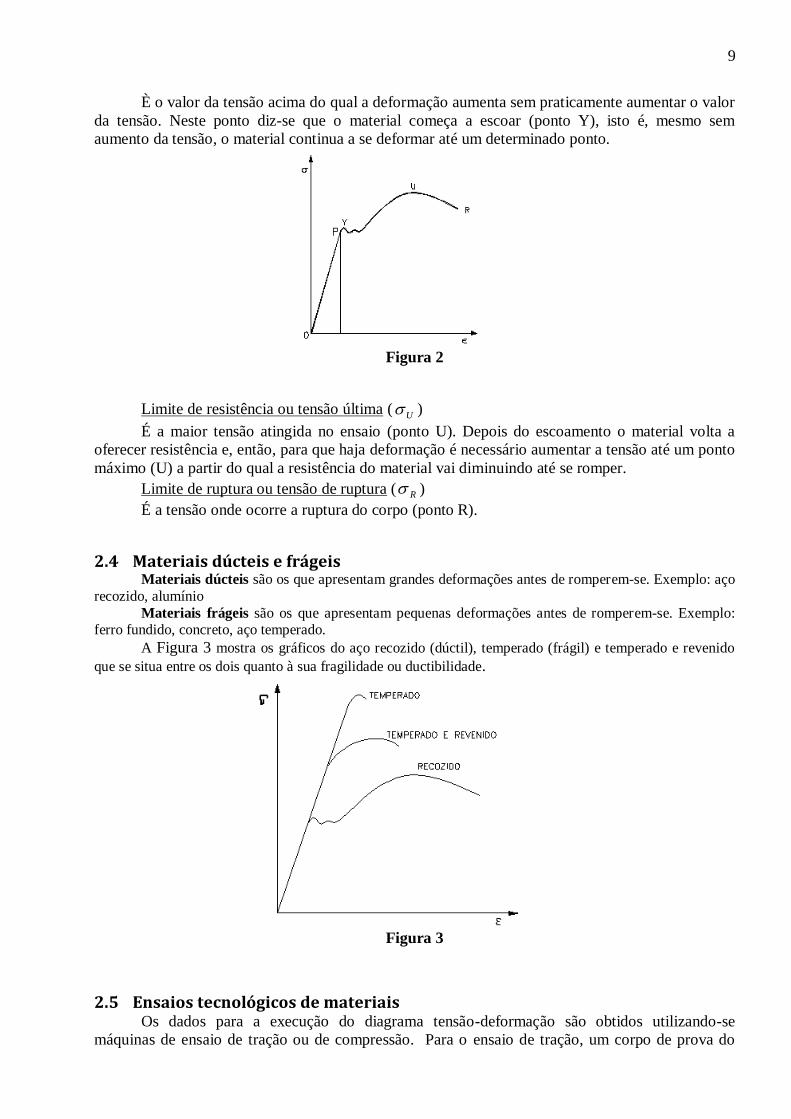
2.4 Materiais dúcteis e frágeis Materiais dúcteis são os que apresentam grandes deformações antes de romperem-se. Exemplo: aço
recozido, alumínio
Materiais frágeis são os que apresentam pequenas deformações antes de romperem-se. Exemplo: ferro fundido, concreto, aço temperado.
A Figura 3 mostra os gráficos do aço recozido (dúctil), temperado (frágil) e temperado e revenido
que se situa entre os dois quanto à sua fragilidade ou ductibilidade.
Figura 3
2.5 Ensaios tecnológicos de materiais Os dados para a execução do diagrama tensão-deformação são obtidos utilizando-se
máquinas de ensaio de tração ou de compressão. Para o ensaio de tração, um corpo de prova do
10
material a ser estudado, é colocado entre as garras da máquina de ensaio. As máquinas mais
modernas possuem extensômetros para medir alongamentos e células de carga que medem a força
aplicada. Através de uma central de processamento acoplada à máquina as medições são
processadas na forma de tensões e deformações específicas, reproduzindo o diagrama num monitor.
2.6 Lei de Hooke Vemos que a curva do diagrama tensão-deformação é uma reta que vai de seu início até o
ponto que define o limite de proporcionalidade (ponto P da Figura 2). Esta relação linear entre a
tensão e a deformação específica é conhecida como Lei de Hooke e pode ser escrita assim:
.E (2.3)
O coeficiente E é chamado de módulo de elasticidade. Isto é, a relação entre a tensão e a
deformação é igual a uma constante (E) chamada de módulo de elasticidade ou módulo de Young.
Sua unidade é igual à de tensão: Kgf/cm2, N/mm2, Pa =N/m2, etc.
O módulo de elasticidade é a medida da rigidez de um material. Ou seja, quanto maior o
módulo de elasticidade de um material menor a deformação que ele sofre sob uma mesma tensão.
O módulo de elasticidade do aço doce é E=207GPa e o do alumínio E=69GPa. Portanto para uma
mesma tensão o alumínio deforma-se elasticamente três vezes mais que o aço.
Considerando a barra da Figura 1.b de comprimento L, área da seção transversal A, e sujeita
à carga axial P e ainda supondo que a tensão AP é menor que a tensão de proporcionalidade,
podemos aplicar a Lei de Hooke e desenvolver a equação para calcular a deformação total .
Substituindo na equação da Lei de Hooke (2.3) o valor de da equação (2.1) e de da
equação (2.2), temos
L
E
A
P .
Ou seja
EA
LP
.
. (2.4)
Exercício: Determinar a deformação total e específica de uma barra de aço (E=200GPa) de 4m de
comprimento e 15mm de diâmetro submetida a uma carga de tração de 20kN.
Respostas: mm3,2 e 410.6,5
2.7 Tensões admissíveis e coeficientes de segurança Vimos pelo diagrama de tensão-deformação que existe um limite de resistência ou uma
tensão de escoamento conforme o material. Conhecendo-se estes limites pode-se estabelecer uma
tensão segura para o trabalho da estrutura. Esta tensão é chamada de tensão admissível ( adm ) e é
obtida dividindo-se a tensão última ou a tensão de escoamento por um coeficiente de segurança
(CS).
Ou seja,
CS
Uadm
ou
CS
Yadm
(2.5)
Quando o material não apresenta uma tensão de escoamento bem definida, como é o caso
dos materiais frágeis, utilizamos a equação com a tensão última U . Mas nos casos de materiais
dúcteis cuja tensão de escoamento Y é bem definida usamos então a segunda equação.
A escolha do CS adequado para as diferentes aplicações práticas depende de vários fatores
como:
-Heterogeneidade do material
-Número de vezes que a carga é aplicada durante a vida da peça.
-Tipo de aplicação da carga: estática, dinâmica, cíclicas, instantânea, etc.
11
-Deterioração por causas imprevisíveis,.
-Responsabilidade da peça na estrutura.
- Etc.
Nos dimensionamentos e aplicações em estruturas e máquinas os CS ou as tensões
admissíveis são especificados por Normas Técnicas de entidades credenciadas.
As tensões admissíveis e CS, fornecidos nos exercícios desta apostila, são meramente
fictícios e servem apenas para efeito de treinamento de como usá-los.
2.8 Dimensionamento das barras
Vimos que as forças axiais de tração ou compressão produzem tensões normais nas seções
transversais da barra que podem ser calculadas pela fórmula:
A
P
Sabendo-se qual é a tensão admissível do material da barra ( adm ) podemos pela fórmula
acima calcular qual deverá ser a área mínima recomendável da seção transversal da barra, isto é,
adm
PA
(2.6)
No caso de barras sujeitas a tração esta fórmula é suficiente para o dimensionamento da
barra. Entretanto, no caso de compressão a solução não é tão simples porque, neste caso, estará
sujeita, também, a um efeito adicional chamado de flambagem. Assim sendo, o dimensionamento
de barras sob compressão deverá ser feito utilizando-se a teoria de Flambagem que não faz parte do
escopo desta apostila.
Além da tensão admissível o dimensionamento de uma barra deve respeitar também os
limites de deformação impostos pelas Normas Técnicas.
12
2.9 Exercícios Obs.: desprezar os pesos próprios das peças em todos os exercícios, exceto quando mencionado o contrário.
1) Uma determinada barra de uma treliça está sujeita a uma força de tração de 20kN.
Pretendendo-se usar barra redonda (cilíndrica), pede-se determinar qual deve ser o seu diâmetro
mais econômico recomendável, sabendo-se que comercialmente encontram-se barras com diâmetros
10mm, 15mm, 20mm, 25mm, etc. Supor que tensão admissível seja 140MPa.
Resposta: 20mm.
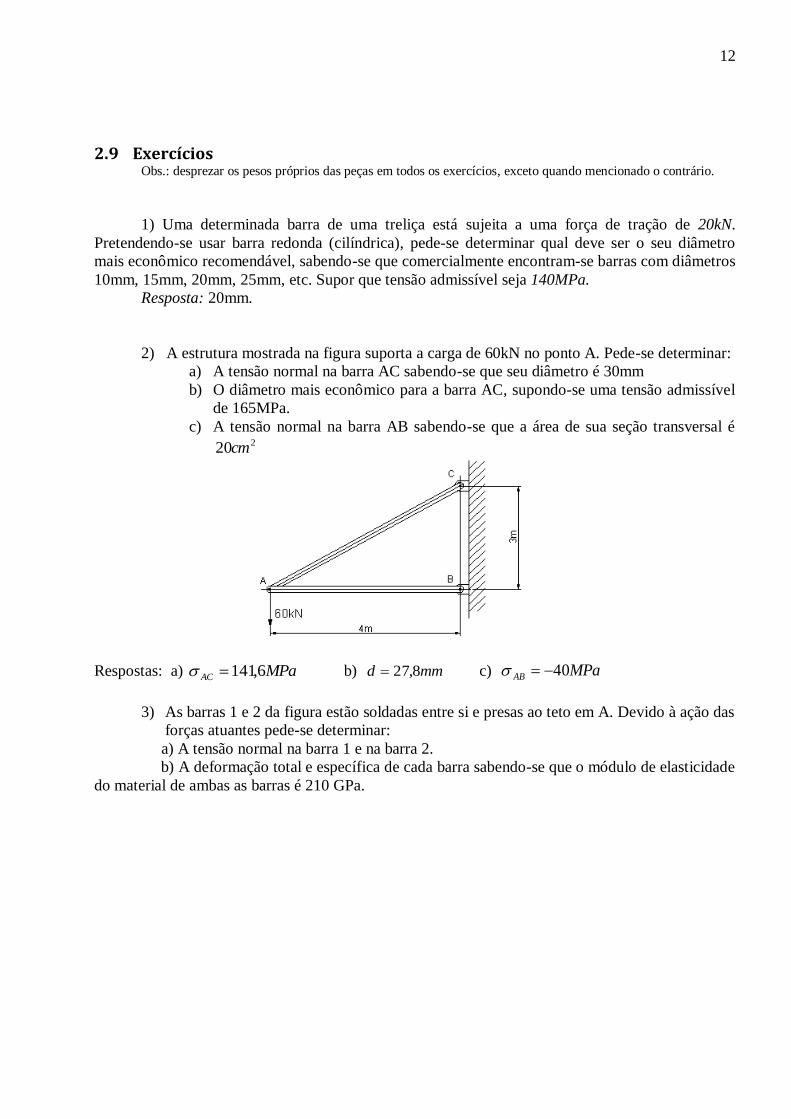
2) A estrutura mostrada na figura suporta a carga de 60kN no ponto A. Pede-se determinar:
a) A tensão normal na barra AC sabendo-se que seu diâmetro é 30mm
b) O diâmetro mais econômico para a barra AC, supondo-se uma tensão admissível
de 165MPa.
c) A tensão normal na barra AB sabendo-se que a área de sua seção transversal é 220cm
Respostas: a) MPaAC 6,141 b) mmd 8,27 c) MPaAB 40
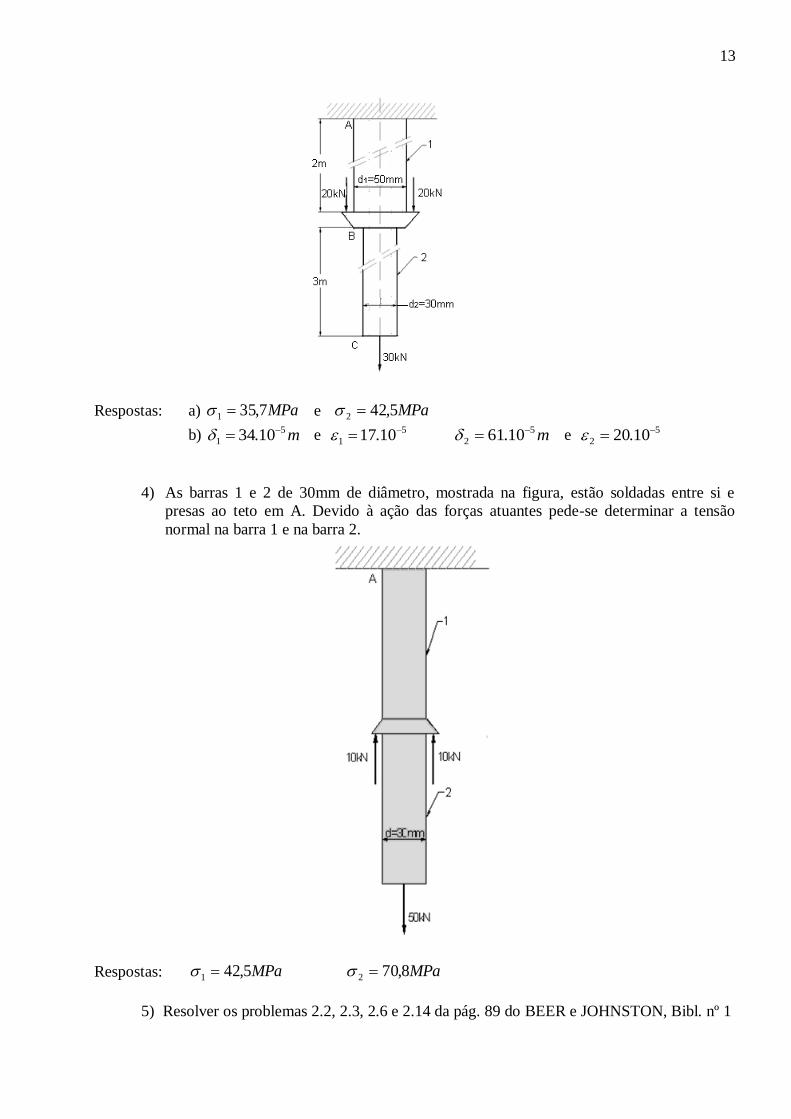
3) As barras 1 e 2 da figura estão soldadas entre si e presas ao teto em A. Devido à ação das
forças atuantes pede-se determinar:
a) A tensão normal na barra 1 e na barra 2.
b) A deformação total e específica de cada barra sabendo-se que o módulo de elasticidade
do material de ambas as barras é 210 GPa.
13
Respostas: a) MPa7,351 e MPa5,422
b) m5
1 10.34 e 5
1 10.17 m5
2 10.61 e 5
2 10.20
4) As barras 1 e 2 de 30mm de diâmetro, mostrada na figura, estão soldadas entre si e
presas ao teto em A. Devido à ação das forças atuantes pede-se determinar a tensão
normal na barra 1 e na barra 2.
Respostas: MPa5,421 MPa8,702
5) Resolver os problemas 2.2, 2.3, 2.6 e 2.14 da pág. 89 do BEER e JOHNSTON, Bibl. nº 1
14
2.10 Problemas estaticamente indeterminados
Um sistema é estaticamente indeterminado quando não pode ser resolvido somente com as
equações da estática. Neste caso devemos também lançar mão de equações da deformação.
Geralmente estes problemas envolvem materiais que possuem módulos de elasticidade
diferentes. Para a solução, primeiro escrevemos as equações de equilíbrio da estática e, em seguida,
relacionando as equações das deformações de cada material obtemos mais uma equação.
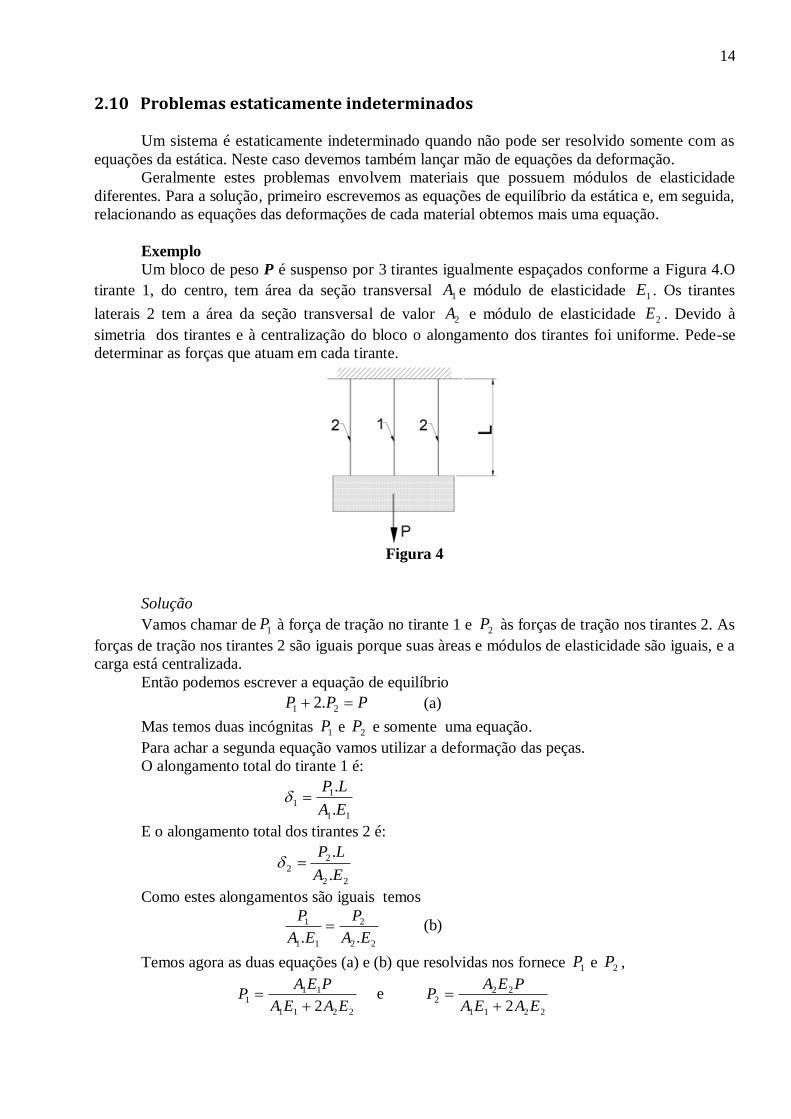
Exemplo
Um bloco de peso P é suspenso por 3 tirantes igualmente espaçados conforme a Figura 4.O
tirante 1, do centro, tem área da seção transversal 1A e módulo de elasticidade 1E . Os tirantes
laterais 2 tem a área da seção transversal de valor 2A e módulo de elasticidade 2E . Devido à
simetria dos tirantes e à centralização do bloco o alongamento dos tirantes foi uniforme. Pede-se
determinar as forças que atuam em cada tirante.
Figura 4
Solução
Vamos chamar de 1P à força de tração no tirante 1 e 2P às forças de tração nos tirantes 2. As
forças de tração nos tirantes 2 são iguais porque suas àreas e módulos de elasticidade são iguais, e a
carga está centralizada.
Então podemos escrever a equação de equilíbrio
PPP 21 .2 (a)
Mas temos duas incógnitas 1P e 2P e somente uma equação.
Para achar a segunda equação vamos utilizar a deformação das peças.
O alongamento total do tirante 1 é:
11
11
.
.
EA
LP
E o alongamento total dos tirantes 2 é:
22
22
.
.
EA
LP
Como estes alongamentos são iguais temos
22
2
11
1
.. EA
P
EA
P (b)
Temos agora as duas equações (a) e (b) que resolvidas nos fornece 1P e 2P ,
2211
111
2 EAEA
PEAP
e
2211
222
2 EAEA
PEAP
15
2.11 Exercícios
1) A figura mostra uma barra prismática de 80cm de comprimento engastada nas suas
extremidades. Uma força axial de KNP 16 é aplicada à distancia cmL 501 da extremidade
esquerda. Determinar as reações 1R e 2R nos apoios.
Respostas: kNR 61 kNR 102
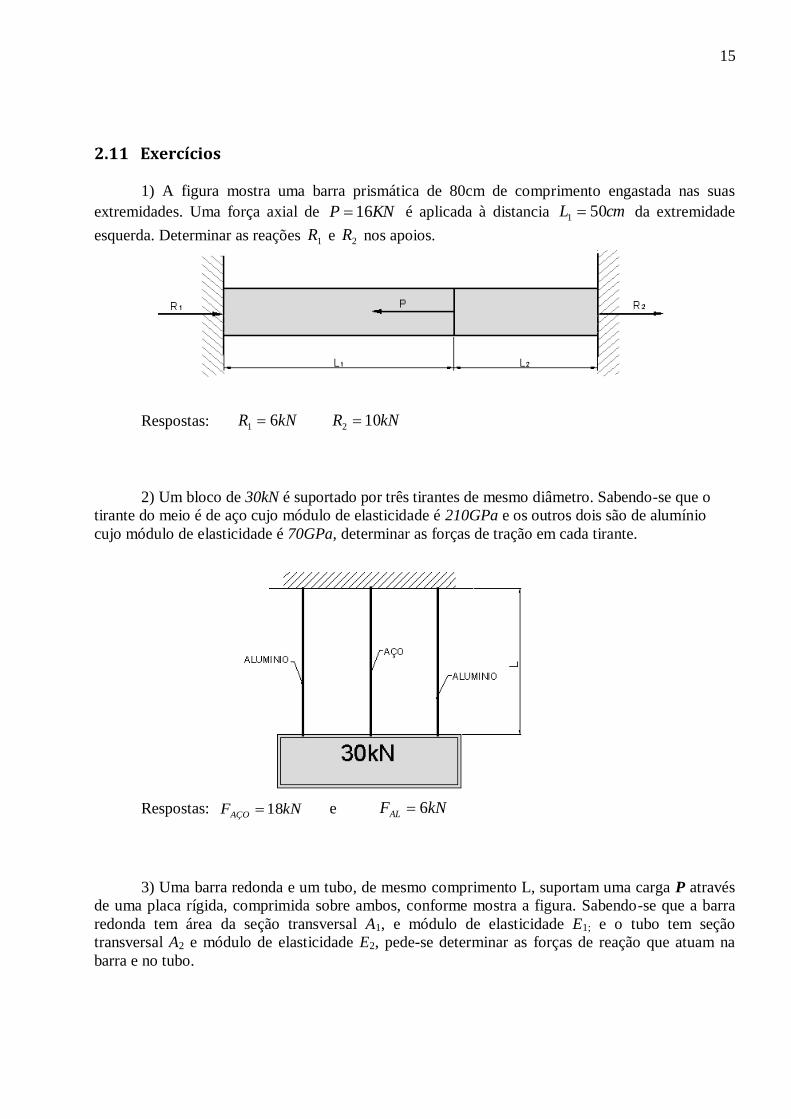
2) Um bloco de 30kN é suportado por três tirantes de mesmo diâmetro. Sabendo-se que o
tirante do meio é de aço cujo módulo de elasticidade é 210GPa e os outros dois são de alumínio
cujo módulo de elasticidade é 70GPa, determinar as forças de tração em cada tirante.
Respostas: kNFAÇO 18 e kNFAL 6
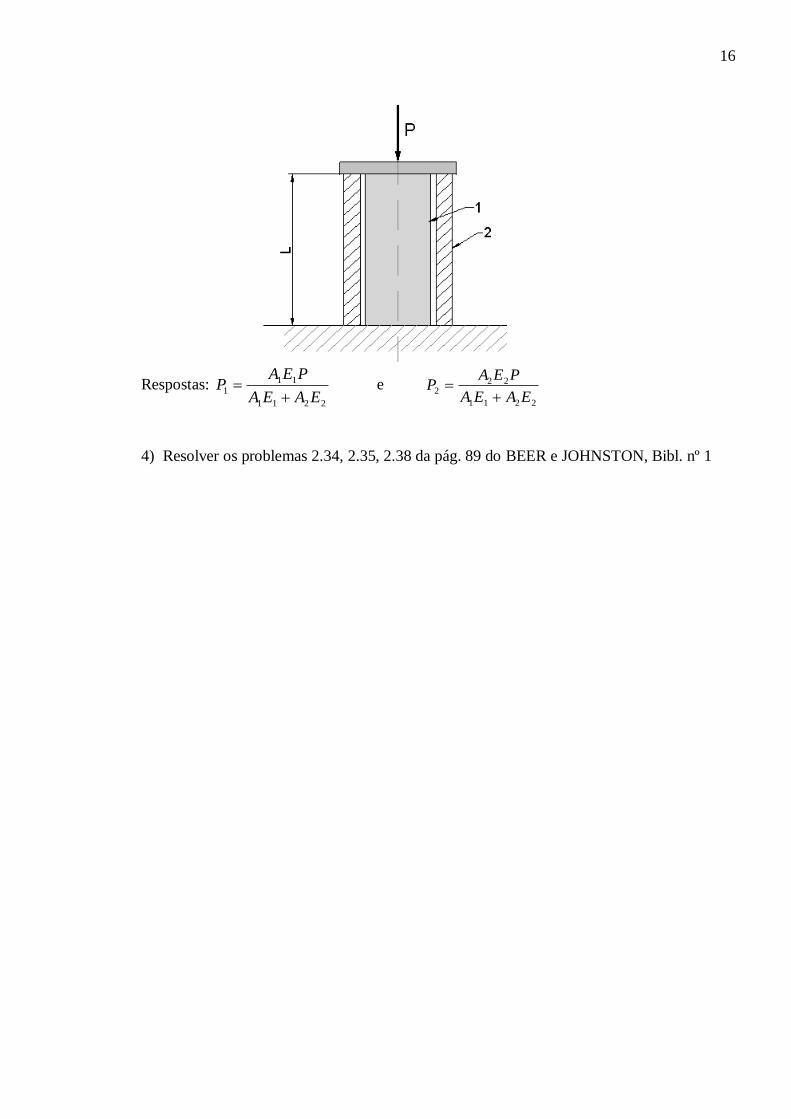
3) Uma barra redonda e um tubo, de mesmo comprimento L, suportam uma carga P através
de uma placa rígida, comprimida sobre ambos, conforme mostra a figura. Sabendo-se que a barra
redonda tem área da seção transversal A1, e módulo de elasticidade E1; e o tubo tem seção
transversal A2 e módulo de elasticidade E2, pede-se determinar as forças de reação que atuam na
barra e no tubo.
16
Respostas: 2211
111
EAEA
PEAP
e
2211
222
EAEA
PEAP
4) Resolver os problemas 2.34, 2.35, 2.38 da pág. 89 do BEER e JOHNSTON, Bibl. nº 1

17
2.12 Tensão Térmica. Influência da variação da temperatura A variação da temperatura sobre qualquer material provoca variação de suas dimensões e
quando levamos em conta a variação da temperatura os esforços internos numa barra serão alterados
dependendo dos vínculos desta barra. Por exemplo, se uma barra está fixada em uma extremidade e
totalmente livre na outra extremidade um aumento na temperatura da barra provocará seu
alongamento, mas, não alterará os esforços internos da barra. Entretanto se suas duas extremidades
estiverem fixadas surgirão esforços internos adicionais e consequentemente aumento de sua tensão
normal. Esta tensão adicional provocada pela variação da temperatura é a chamada tensão térmica.
Portanto, numa barra rigidamente fixada (engastada) nas suas extremidades e isenta de tensões
internas um aumento da temperatura provocará tensão normal de compressão e uma diminuição da
temperatura provocará tensão normal de tração. Ambas as tensões são tensões térmicas.
Para o cálculo da tensão térmica utilizamos a fórmula da dilatação térmica, isto é,
𝜕𝑇 =∝ ∆𝑇 𝐿 (2.7)
Onde
𝜕𝑇 é a variação total do comprimento da barra provocada pela variação da temperatura.
𝛼 é o coeficiente de dilatação linear (Unidade no SI: 1/°C ou 1/°K).
∆𝑇 é a variação da temperatura da barra.
L é o comprimento inicial da barra.
Se as extremidades da barra são fixas, através de engastamentos suficientemente resistentes,
eles exercerão sobre a barra uma força axial impedindo a variação de comprimento da barra,
consequentemente, utilizando a fórmula da deformação total (2.4) esta força axial de origem
térmica é
𝑃𝑇 = −𝜕𝑇 𝐴 𝐸
𝐿= −𝛼 ∆𝑇 𝐴 𝐸 (2.8)
O sinal é negativo, pois, quando a variação da temperatura for positiva a força térmica é de
compressão e se a variação da temperatura for negativa a força térmica é de tração.
Assim sendo, a equação da tensão térmica é
𝜎𝑇 =𝑃𝑇
𝐴= −
𝜕𝑇 𝐸
𝐿= −𝛼 ∆𝑇 𝐸 (2.9)
Exercício resolvido
Uma barra de 750mm de comprimento com seção transversal quadrada de 3cm de lado está
presa em suas extremidades e à temperatura de 25°C está isenta de tensões. Quando a temperatura
da barra atingir 45°C qual é o valor: (a) das reações nos apoios e (b) da tensão normal que atua na
barra? Sabe-se que para o material da barra o módulo de elasticidade é 120GPa e o coeficiente de
dilatação linear é 16,7.10-6
/°C. Desprezar o efeito de flambagem.
Solução:
Dados: L = 750mm = 0,75m
a = 3cm = 3.10-2
m
T1 = 25°C e T2 = 45°C
E = 120GPa = 120.109Pa
∝ = 16,7. 10−6/°𝐶
Cálculos: ∆𝑇 = 45°𝐶 − 25°𝐶 = 20°𝐶
𝐴 = (3. 10−2)2 = 9. 10−4𝑚2
(a) 𝑃𝑇 = 16,7. 10−6. 20.9. 10−4. 120. 109 = 36,072. 103𝑁
(b) 𝜎𝑇 = −36,072.103
9.10−4 = −4. 107𝑃𝑎 (Compressão)
18
2.13 Equações das forças normais Já vimos que as forças axiais que atuam numa barra provocam forças internas nas suas
seções transversais. Estas forças internas, que são normais (“perpendiculares”) às seções
transversais são chamadas de forças normais.
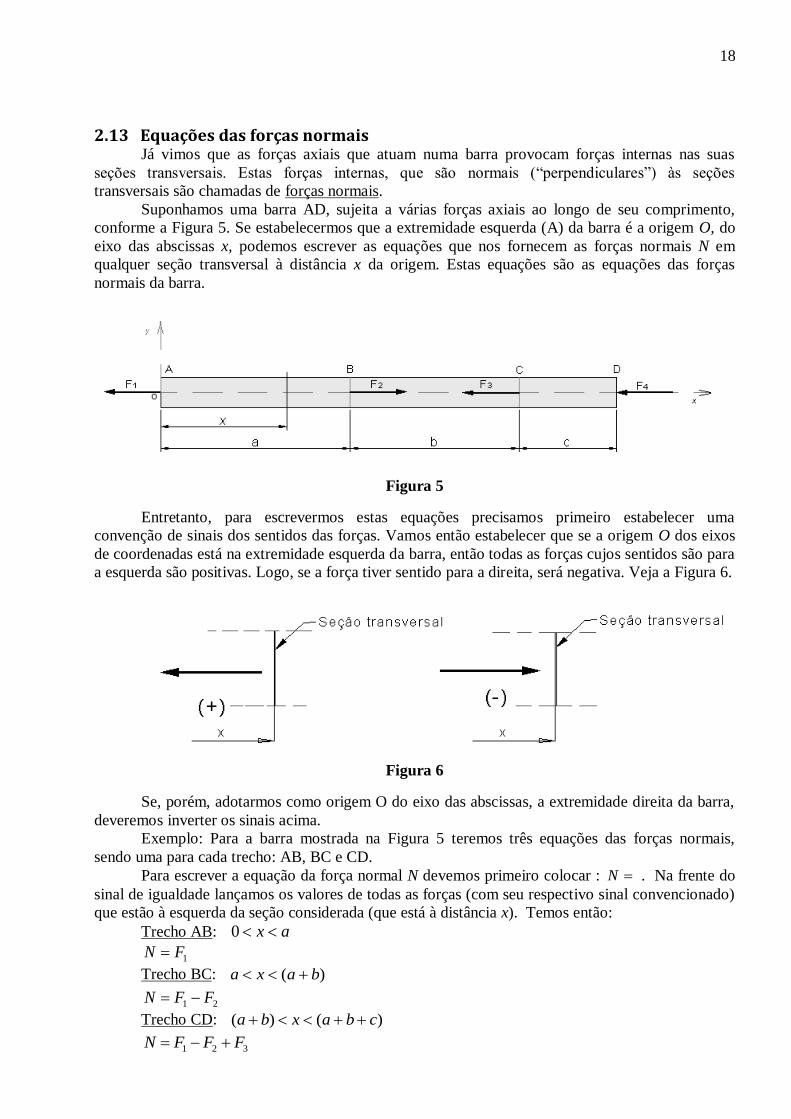
Suponhamos uma barra AD, sujeita a várias forças axiais ao longo de seu comprimento,
conforme a Figura 5. Se estabelecermos que a extremidade esquerda (A) da barra é a origem O, do
eixo das abscissas x, podemos escrever as equações que nos fornecem as forças normais N em
qualquer seção transversal à distância x da origem. Estas equações são as equações das forças
normais da barra.
Figura 5
Entretanto, para escrevermos estas equações precisamos primeiro estabelecer uma
convenção de sinais dos sentidos das forças. Vamos então estabelecer que se a origem O dos eixos
de coordenadas está na extremidade esquerda da barra, então todas as forças cujos sentidos são para
a esquerda são positivas. Logo, se a força tiver sentido para a direita, será negativa. Veja a Figura 6.
Figura 6
Se, porém, adotarmos como origem O do eixo das abscissas, a extremidade direita da barra,
deveremos inverter os sinais acima.
Exemplo: Para a barra mostrada na Figura 5 teremos três equações das forças normais,
sendo uma para cada trecho: AB, BC e CD.
Para escrever a equação da força normal N devemos primeiro colocar : N . Na frente do
sinal de igualdade lançamos os valores de todas as forças (com seu respectivo sinal convencionado)
que estão à esquerda da seção considerada (que está à distância x). Temos então:
Trecho AB: ax 0
1FN
Trecho BC: )( baxa
21 FFN
Trecho CD: )()( cbaxba
321 FFFN
19
2.14 Diagrama das forças normais O diagrama das forças normais é feito lançando no eixo das abscissas a distância x da seção
transversal considerada, e no eixo das ordenadas o valor da força normal N que atua naquela seção.
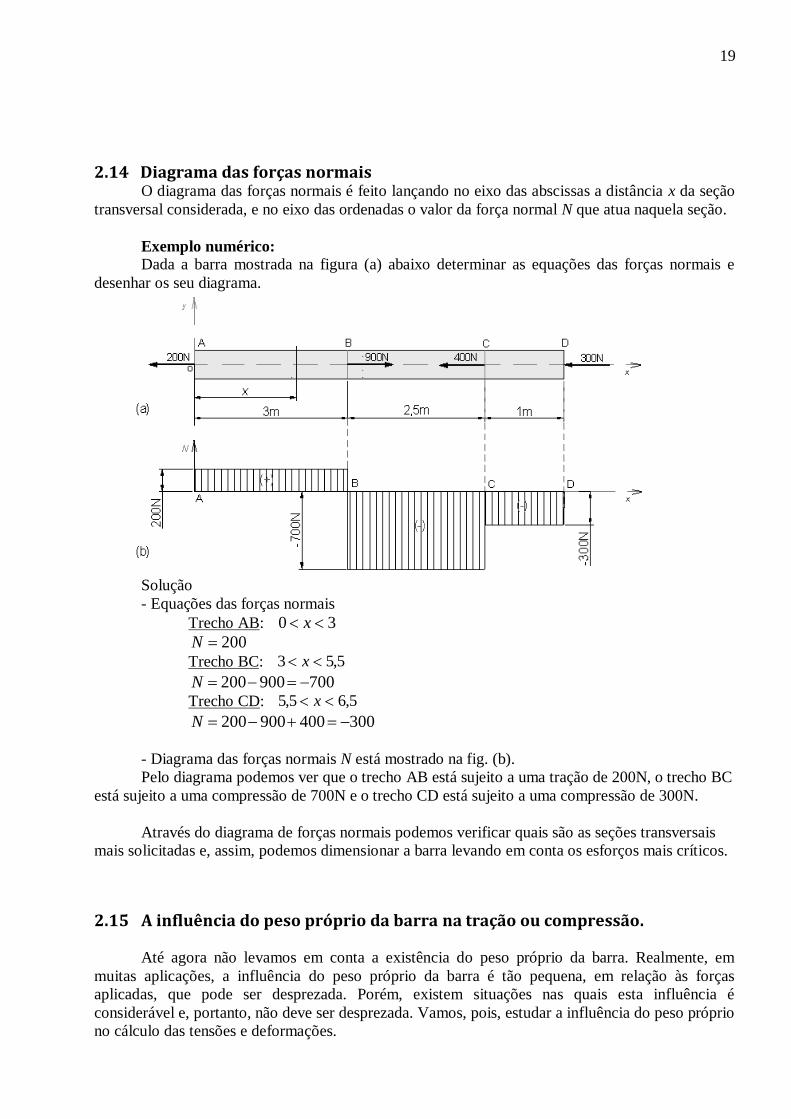
Exemplo numérico:
Dada a barra mostrada na figura (a) abaixo determinar as equações das forças normais e
desenhar os seu diagrama.
Solução
- Equações das forças normais
Trecho AB: 30 x
200N
Trecho BC: 5,53 x
700900200 N
Trecho CD: 5,65,5 x
300400900200 N
- Diagrama das forças normais N está mostrado na fig. (b).
Pelo diagrama podemos ver que o trecho AB está sujeito a uma tração de 200N, o trecho BC
está sujeito a uma compressão de 700N e o trecho CD está sujeito a uma compressão de 300N.
Através do diagrama de forças normais podemos verificar quais são as seções transversais
mais solicitadas e, assim, podemos dimensionar a barra levando em conta os esforços mais críticos.
2.15 A influência do peso próprio da barra na tração ou compressão.
Até agora não levamos em conta a existência do peso próprio da barra. Realmente, em
muitas aplicações, a influência do peso próprio da barra é tão pequena, em relação às forças
aplicadas, que pode ser desprezada. Porém, existem situações nas quais esta influência é
considerável e, portanto, não deve ser desprezada. Vamos, pois, estudar a influência do peso próprio
no cálculo das tensões e deformações.

20
Quando a barra está em posição vertical, como na Figura 7, a força produzida pelo peso
próprio da barra é na direção de seu eixo e, portanto, produz força normal e tensão normal nas
seções transversais. Porém se a barra está posicionada horizontalmente a ação do peso próprio são
forças transversais à barra e, portanto, não produzem diretamente forças normais ou tensões
normais. Nesta situação o peso próprio produzirá flexão cujo estudo veremos mais adiante.
Seja uma barra AB de comprimento L, seção transversal com área A, peso específico ,
presa na extremidade superior A, conforme a Figura 7.
Figura 7
Vamos colocar o sistema de eixos de coordenadas conforme mostrado.
A força normal que atua na seção transversal nn é provocada pelo peso da barra que está
abaixo da seção transversal, portanto,
..yAN (2.10)
A tensão normal que atua na seção nn é calculada por
...
yA
yA (2.11)
A força normal máxima e, portanto, a tensão normal máxima ocorre para Ly e seus
valores são
...max VLAN (1.12)
..
LA
V (2.13)
Sendo V o volume total da barra.
21
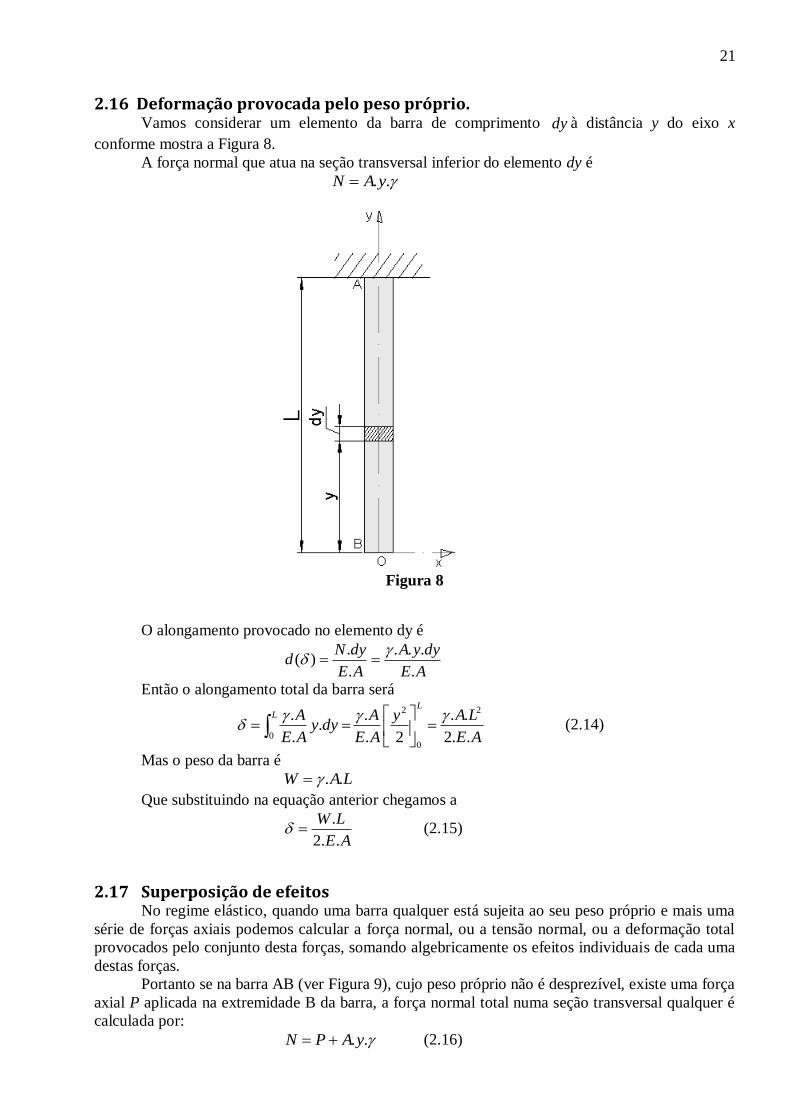
2.16 Deformação provocada pelo peso próprio. Vamos considerar um elemento da barra de comprimento dy à distância y do eixo x
conforme mostra a Figura 8.
A força normal que atua na seção transversal inferior do elemento dy é
..yAN
Figura 8
O alongamento provocado no elemento dy é
AE
dyyA
AE
dyNd
.
...
.
.)(
Então o alongamento total da barra será
AE
LAy
AE
Adyy
AE
AL
L
..2
..
2.
..
.
. 2
0
2
0
(2.14)
Mas o peso da barra é
LAW ..
Que substituindo na equação anterior chegamos a
AE
LW
..2
. (2.15)
2.17 Superposição de efeitos No regime elástico, quando uma barra qualquer está sujeita ao seu peso próprio e mais uma
série de forças axiais podemos calcular a força normal, ou a tensão normal, ou a deformação total
provocados pelo conjunto desta forças, somando algebricamente os efeitos individuais de cada uma
destas forças.
Portanto se na barra AB (ver Figura 9), cujo peso próprio não é desprezível, existe uma força
axial P aplicada na extremidade B da barra, a força normal total numa seção transversal qualquer é
calculada por:
..yAPN (2.16)

22
A tensão normal nesta seção é calculada por:
.yA
P (2.17)
A força normal máxima e, portanto, a tensão normal máxima ocorre para Ly e seus
valores são
...max VPLAPN (2.18)
..
max LA
P
A
VP
(2.19)
Sendo V o volume total da barra.
Figura 9
A deformação total da barra também pode ser calculada somando os efeitos do peso próprio
da barra e da força axial P, isto é,
AE
LP
W
AE
LP
AE
LW
.2.
.
..2
.
(2.20)
Exercícios
1) Uma barra de aço de 12mm de diâmetro e 90m de comprimento, em posição vertical, é
presa na extremidade superior e na extremidade inferior suporta uma carga 2kN. Pede-se determinar
as máximas força normal e a tensão normal na barra, bem como o seu alongamento total sem
desprezar o seu peso próprio. O peso específico do aço é 378 mkN e seu módulo de elasticidade é
210GPa.
Respostas: 2793N, 24,7.106 Pa, 9,08mm
2) Determinar o comprimento máximo que pode ter um fio suspenso verticalmente supondo-
se que sua tensão admissível seja 120MPa e o peso especifico 378 mkN .
Resposta: 1538m
23
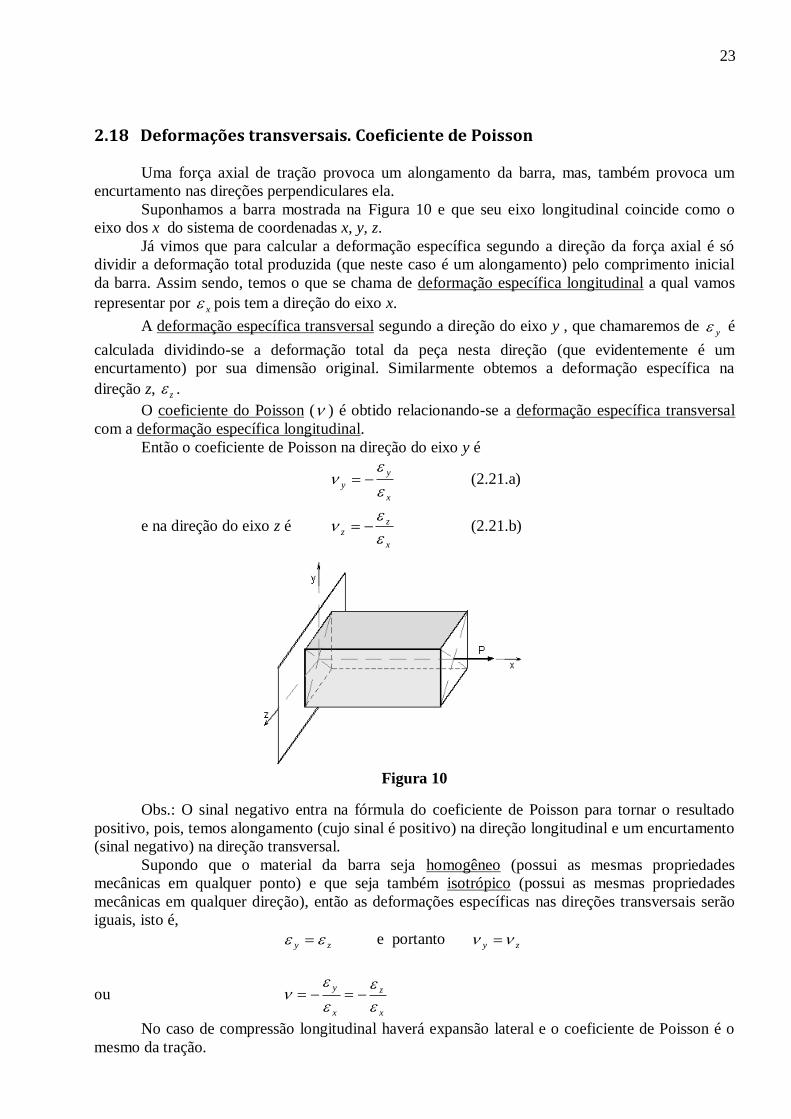
2.18 Deformações transversais. Coeficiente de Poisson
Uma força axial de tração provoca um alongamento da barra, mas, também provoca um
encurtamento nas direções perpendiculares ela.
Suponhamos a barra mostrada na Figura 10 e que seu eixo longitudinal coincide como o
eixo dos x do sistema de coordenadas x, y, z.
Já vimos que para calcular a deformação específica segundo a direção da força axial é só
dividir a deformação total produzida (que neste caso é um alongamento) pelo comprimento inicial
da barra. Assim sendo, temos o que se chama de deformação específica longitudinal a qual vamos
representar por x pois tem a direção do eixo x.
A deformação específica transversal segundo a direção do eixo y , que chamaremos de y é
calculada dividindo-se a deformação total da peça nesta direção (que evidentemente é um
encurtamento) por sua dimensão original. Similarmente obtemos a deformação específica na
direção z, z .
O coeficiente do Poisson ( ) é obtido relacionando-se a deformação específica transversal
com a deformação específica longitudinal.
Então o coeficiente de Poisson na direção do eixo y é
x
y
y
(2.21.a)
e na direção do eixo z é x
zz
(2.21.b)
Figura 10
Obs.: O sinal negativo entra na fórmula do coeficiente de Poisson para tornar o resultado
positivo, pois, temos alongamento (cujo sinal é positivo) na direção longitudinal e um encurtamento
(sinal negativo) na direção transversal.
Supondo que o material da barra seja homogêneo (possui as mesmas propriedades
mecânicas em qualquer ponto) e que seja também isotrópico (possui as mesmas propriedades
mecânicas em qualquer direção), então as deformações específicas nas direções transversais serão
iguais, isto é,
zy e portanto zy
ou x
z
x
y
No caso de compressão longitudinal haverá expansão lateral e o coeficiente de Poisson é o
mesmo da tração.
24
Para o aço de construção o coeficiente de Poisson pode ser tomado como sendo 3,0 .
2.19 Exercícios 1) Suponha uma barra redonda de aço cujo diâmetro tem 50mm. Sabendo-se que seu
diâmetro diminuiu 0,01mm após a aplicação de uma força de tração P, que para o aço o coeficiente
de Poisson é 0,3 e o módulo de elasticidade é 210GPa, pede-se determinar a força P.
Resposta: NP 510.74,2
2) Uma barra de aço de 4,8m de comprimento possui seção transversal retangular cujos
lados são mma 20 e mmb 5 . Qual será a redução destes lados quando se submete a barra a uma
força axial de tração de 12kN? Sabe-se que o coeficiente de Poisson é 0,3 e o módulo de
elasticidade é 210GPa.
Resposta: ma
610.42,3 e mb
710.55,8
3) Resolver os problemas 2.66, 2.67, 2.69 da pág. 144 do BEER e JOHNSTON, Bibl. nº 1.
25
3 CISALHAMENTO
3.1 Solicitações transversais. Tensão de cisalhamento. Até agora estudamos somente as forças axiais, ou seja, forças coincidentes com o eixo da
barra e, portanto, são solicitações normais à seção transversal.
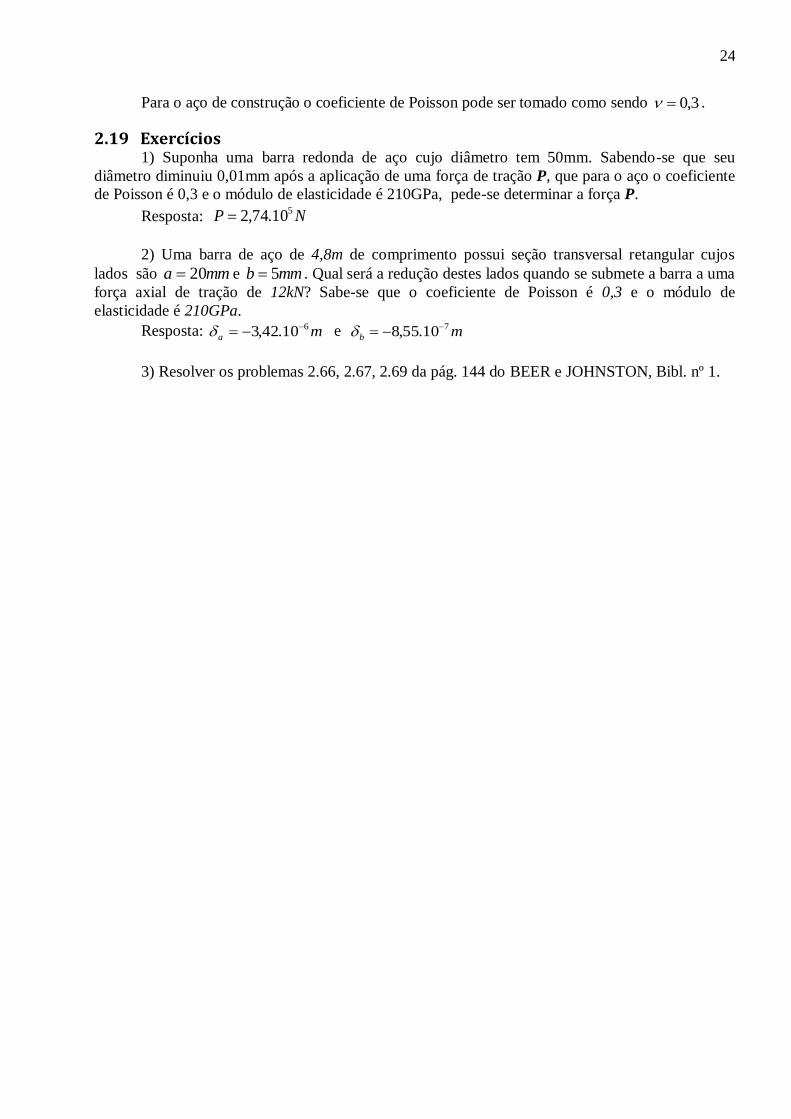
Forças transversais ao eixo da barra tendem a provocar corte (ou cisalhamento) da barra. A
Figura 11.a mostra uma barra sujeita às laminas de uma tesoura que sob a ação das forças P tendem
a cortar a barra na seção n-n. Identicamente, o rebite da Figura 11.b tende a ser cortado na seção n-
n.
Figura 11
Se considerarmos a seção transversal em n-n da barra (ou do rebite), cuja área
representaremos por A, esta estará submetida a uma tensão que não é normal mas paralela a ela, ou
seja, uma tensão que tende a “cisalhar” a barra e, por isso, é chamada de tensão de cisalhamento ( )
que é determinada na prática por:
A
P (3.1)
O cálculo da tensão de cisalhamento é necessário para o dimensionamento de rebites,
parafusos, chavetas, pinos, etc. os quais, na maioria das vezes trabalham a cisalhamento.
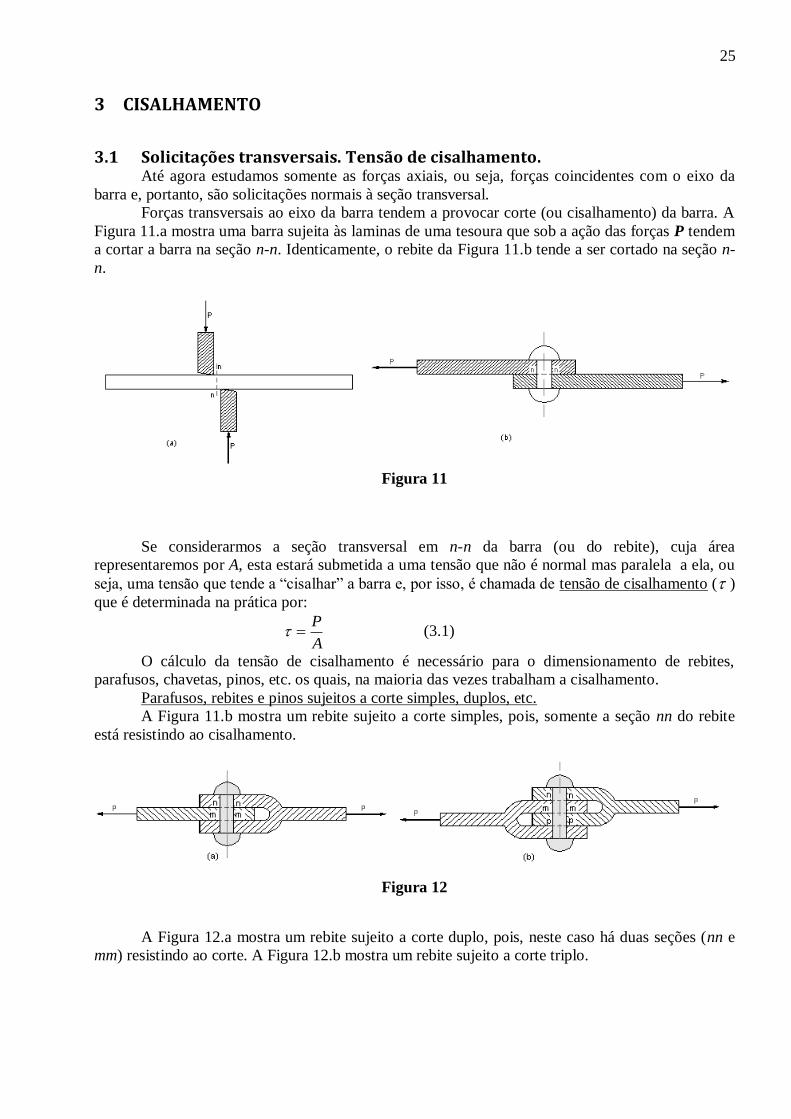
Parafusos, rebites e pinos sujeitos a corte simples, duplos, etc.
A Figura 11.b mostra um rebite sujeito a corte simples, pois, somente a seção nn do rebite
está resistindo ao cisalhamento.
Figura 12
A Figura 12.a mostra um rebite sujeito a corte duplo, pois, neste caso há duas seções (nn e
mm) resistindo ao corte. A Figura 12.b mostra um rebite sujeito a corte triplo.
26
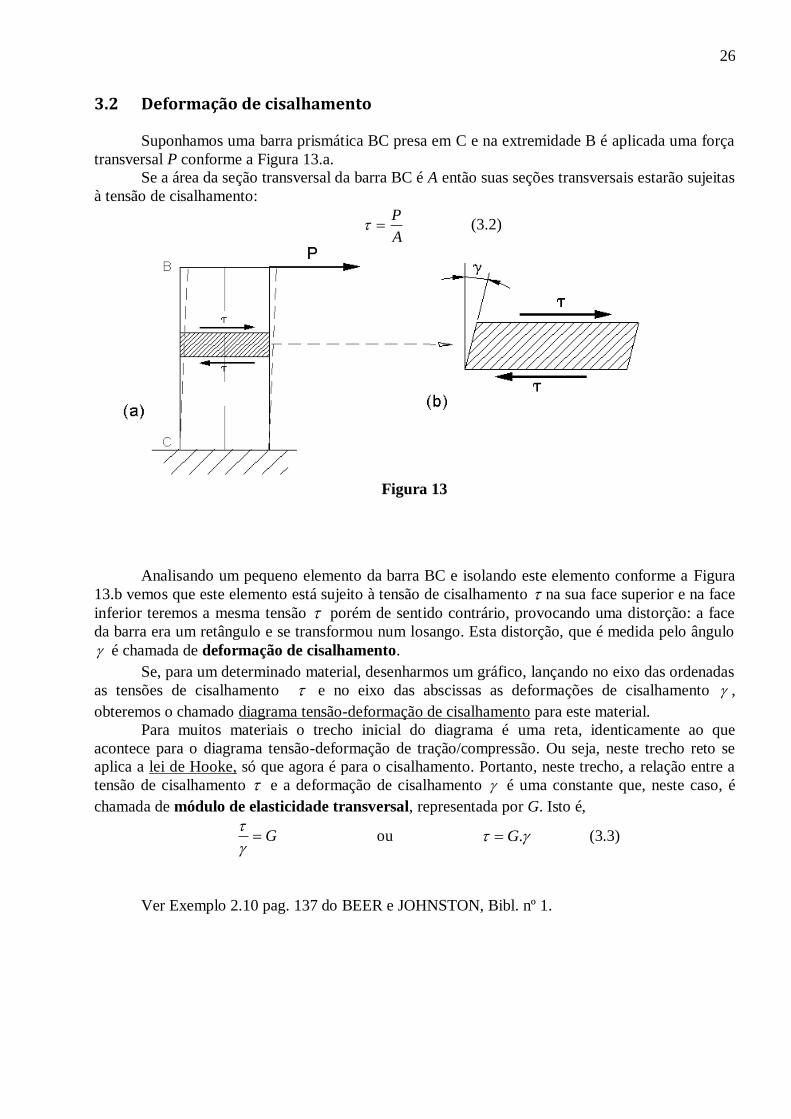
3.2 Deformação de cisalhamento
Suponhamos uma barra prismática BC presa em C e na extremidade B é aplicada uma força
transversal P conforme a Figura 13.a.
Se a área da seção transversal da barra BC é A então suas seções transversais estarão sujeitas
à tensão de cisalhamento:
A
P (3.2)
Figura 13
Analisando um pequeno elemento da barra BC e isolando este elemento conforme a Figura
13.b vemos que este elemento está sujeito à tensão de cisalhamento na sua face superior e na face
inferior teremos a mesma tensão porém de sentido contrário, provocando uma distorção: a face
da barra era um retângulo e se transformou num losango. Esta distorção, que é medida pelo ângulo
é chamada de deformação de cisalhamento.
Se, para um determinado material, desenharmos um gráfico, lançando no eixo das ordenadas
as tensões de cisalhamento e no eixo das abscissas as deformações de cisalhamento ,
obteremos o chamado diagrama tensão-deformação de cisalhamento para este material.
Para muitos materiais o trecho inicial do diagrama é uma reta, identicamente ao que
acontece para o diagrama tensão-deformação de tração/compressão. Ou seja, neste trecho reto se
aplica a lei de Hooke, só que agora é para o cisalhamento. Portanto, neste trecho, a relação entre a
tensão de cisalhamento e a deformação de cisalhamento é uma constante que, neste caso, é
chamada de módulo de elasticidade transversal, representada por G. Isto é,
G
ou .G (3.3)
Ver Exemplo 2.10 pag. 137 do BEER e JOHNSTON, Bibl. nº 1.
27
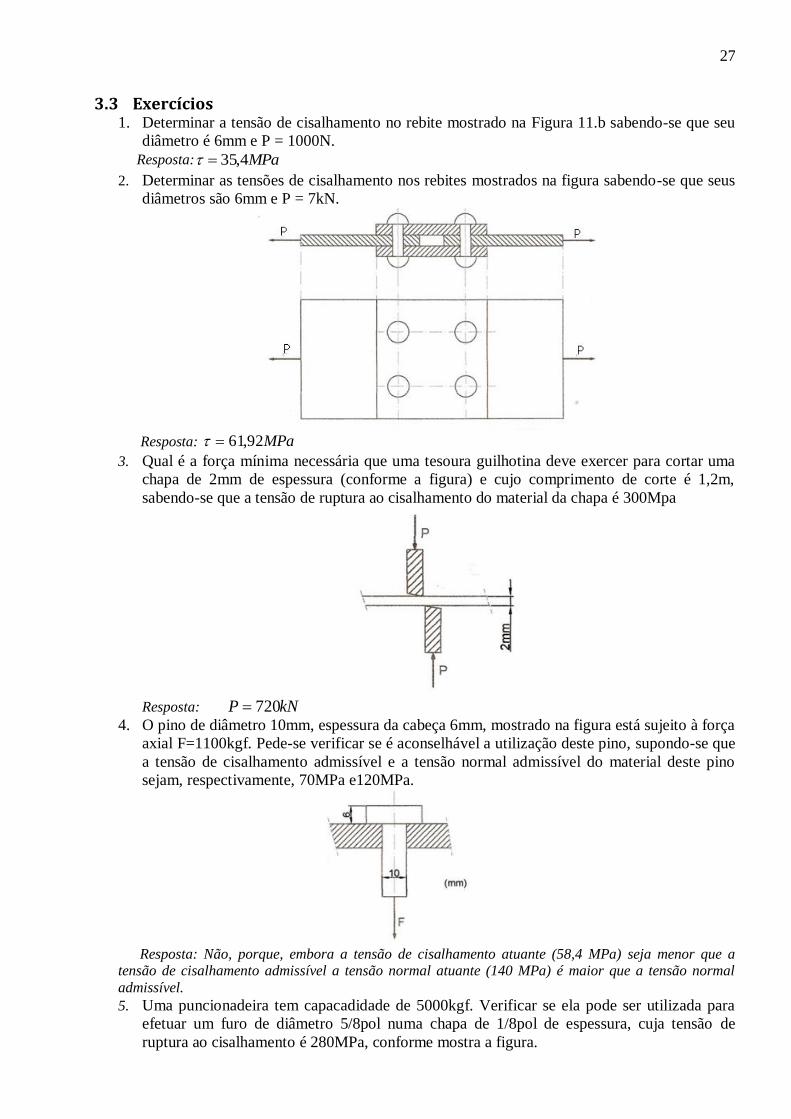
3.3 Exercícios 1. Determinar a tensão de cisalhamento no rebite mostrado na Figura 11.b sabendo-se que seu
diâmetro é 6mm e P = 1000N.
Resposta: MPa4,35
2. Determinar as tensões de cisalhamento nos rebites mostrados na figura sabendo-se que seus
diâmetros são 6mm e P = 7kN.
Resposta: MPa92,61
3. Qual é a força mínima necessária que uma tesoura guilhotina deve exercer para cortar uma
chapa de 2mm de espessura (conforme a figura) e cujo comprimento de corte é 1,2m,
sabendo-se que a tensão de ruptura ao cisalhamento do material da chapa é 300Mpa
Resposta: kNP 720
4. O pino de diâmetro 10mm, espessura da cabeça 6mm, mostrado na figura está sujeito à força
axial F=1100kgf. Pede-se verificar se é aconselhável a utilização deste pino, supondo-se que
a tensão de cisalhamento admissível e a tensão normal admissível do material deste pino
sejam, respectivamente, 70MPa e120MPa.
Resposta: Não, porque, embora a tensão de cisalhamento atuante (58,4 MPa) seja menor que a tensão de cisalhamento admissível a tensão normal atuante (140 MPa) é maior que a tensão normal
admissível.
5. Uma puncionadeira tem capacadidade de 5000kgf. Verificar se ela pode ser utilizada para
efetuar um furo de diâmetro 5/8pol numa chapa de 1/8pol de espessura, cuja tensão de
ruptura ao cisalhamento é 280MPa, conforme mostra a figura.
28
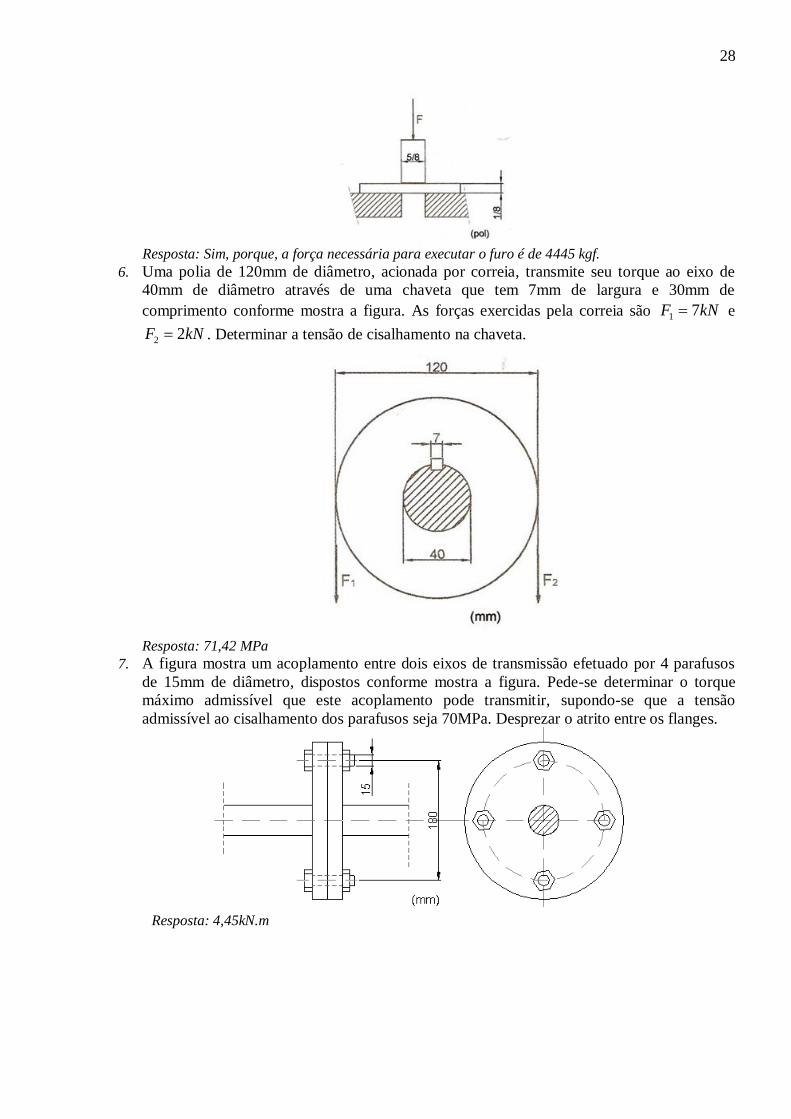
Resposta: Sim, porque, a força necessária para executar o furo é de 4445 kgf.
6. Uma polia de 120mm de diâmetro, acionada por correia, transmite seu torque ao eixo de
40mm de diâmetro através de uma chaveta que tem 7mm de largura e 30mm de
comprimento conforme mostra a figura. As forças exercidas pela correia são kNF 71 e
kNF 22 . Determinar a tensão de cisalhamento na chaveta.
Resposta: 71,42 MPa
7. A figura mostra um acoplamento entre dois eixos de transmissão efetuado por 4 parafusos
de 15mm de diâmetro, dispostos conforme mostra a figura. Pede-se determinar o torque
máximo admissível que este acoplamento pode transmitir, supondo-se que a tensão
admissível ao cisalhamento dos parafusos seja 70MPa. Desprezar o atrito entre os flanges.
Resposta: 4,45kN.m
29
4 TORÇÃO
4.1 Introdução Estudaremos a torção somente para barras de seção circular.
Torção é o efeito produzido numa barra devido à atuação de momentos (ou torques) de
torção aplicados de forma a torcer a barra.
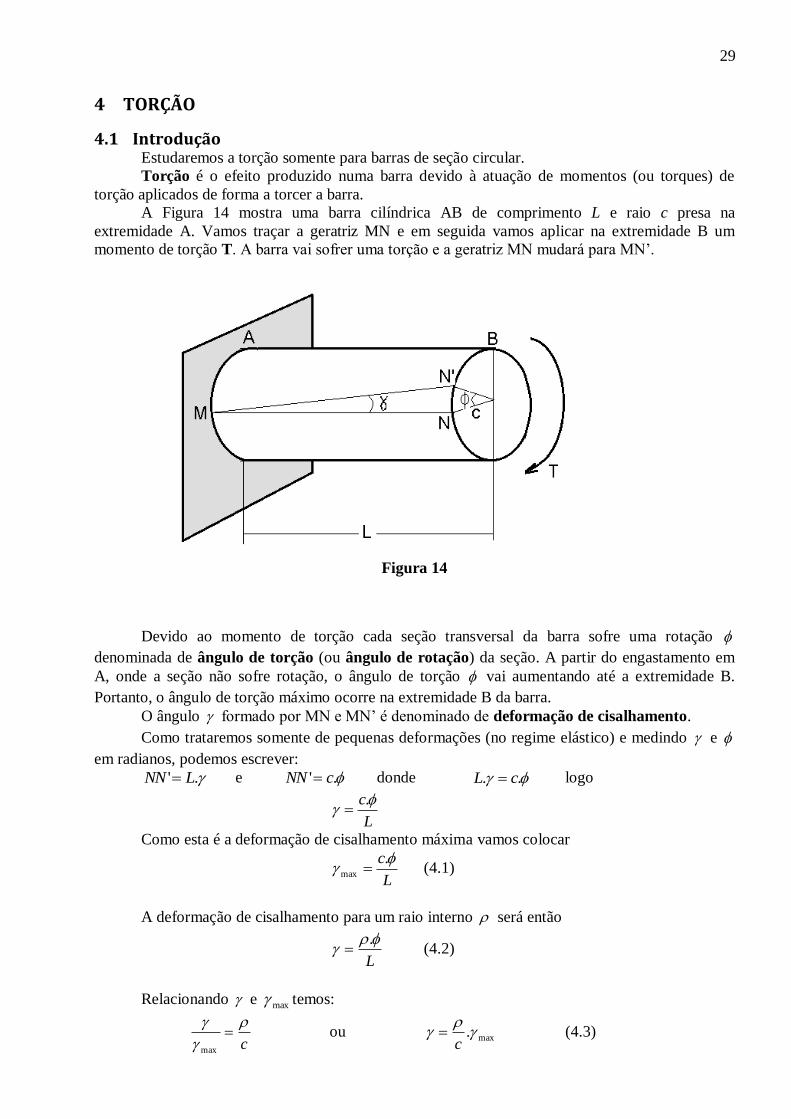
A Figura 14 mostra uma barra cilíndrica AB de comprimento L e raio c presa na
extremidade A. Vamos traçar a geratriz MN e em seguida vamos aplicar na extremidade B um
momento de torção T. A barra vai sofrer uma torção e a geratriz MN mudará para MN’.
Figura 14
Devido ao momento de torção cada seção transversal da barra sofre uma rotação
denominada de ângulo de torção (ou ângulo de rotação) da seção. A partir do engastamento em
A, onde a seção não sofre rotação, o ângulo de torção vai aumentando até a extremidade B.
Portanto, o ângulo de torção máximo ocorre na extremidade B da barra.
O ângulo formado por MN e MN’ é denominado de deformação de cisalhamento.
Como trataremos somente de pequenas deformações (no regime elástico) e medindo e
em radianos, podemos escrever:
.' LNN e .' cNN donde logo
L
c
.
Como esta é a deformação de cisalhamento máxima vamos colocar
L
c
.max (4.1)
A deformação de cisalhamento para um raio interno será então
L
. (4.2)
Relacionando e max temos:
c
max
ou max.
c
(4.3)
.. cL

30
4.2 Tensão de cisalhamento O momento de torção T provoca em todas as seções transversais da barra uma distribuição
de forças paralela à seção e , consequentemente, tensão de cisalhamento.
A Figura 15 mostra a distribuição de forças numa seção transversal qualquer da barra.
Figura 15
Considerando uma área elementar dA a uma distância do centro e, considerando ainda que
nesta área elementar atua a força elementar dF, então momento desta em relação ao centro da seção
é .dFdT , logo o momento para toda área da seção transversal será
dFT . (4.4)
A tensão de cisalhamento na área dA é calculada por dA
dF então dAdF . que
substituindo em (4.4) obtemos
dAT .. (4.6)
Multiplicando a equação (4.3) por G ( módulo de elasticidade transversal) obtemos
max...
Gc
G
Mas pela lei de Hooke temos
.G (4.7)
então
max.
c
(4.8)
Substituindo (4.8) em (4.6):
dAc
dAc
T .. 2maxmax
2
(4.9)
Mas dA.2 é o momento de inércia polar em relação ao centro da seção, isto é,
dAJ .2 que substituindo em (4.9) obtemos
c
JT
.max
Donde J
cT .max (4.10)
Esta é a tensão de cisalhamento máxima e ocorre na periferia da seção. A tensão de
cisalhamento num ponto qualquer interno à seção cuja distancia ao centro é é calculada,
conforme a equação (4.8), por:
J
T
. (4.11)

31
A tensão de cisalhamento na barra circular varia linearmente com a distância ao eixo da
barra.
4.3 Eixo circular vazado (tubo) A Figura 16.a mostra a distribuição de tensões de cisalhamento em um eixo circular maciço.
A Figura 16.b mostra a distribuição de tensões de cisalhamento em um eixo circular vazado,
de raio interno c1 e raio externo c2. Da equação (4.10) temos neste caso
J
cT 2max
. (4.12.a)
E da equação (4.8) obtermos max
2
1min .
c
c (4.12.b)
Figura 16
O momento de inércia polar para um círculo é calculado por
2
. 4cJ
(4.13)
Para a seção transversal de um eixo vazado (tubo) temos
4
1
4
22
ccJ
(4.14)
O momento de torção T será expresso em N.m, c e ρ em m, e J em m4. A tensão de
cisalhamento será expressa em N/m2, isto é, em pascal (Pa).
4.4 Deformação de cisalhamento ( )
Pela equação (4.7) .G obtemos maxmax . G e portanto
G
max
max
(4.16)
Substituindo max da equação (4.10) na equação (4.16) obtemos
GJ
cT
.
.max (4.17) ou
GJ
T
.
. (4.18)
4.5 Ângulo de torção ( )
Pela equação (4.1) L
c
.max obtemos
maxc
L (4.15)
Substituindo o valor de max da equação (4.17) obtemos finalmente
GJ
LT
.
. (4.19)
32
4.6 Exercícios
1) Determinar o diâmetro de uma barra sujeita a um momento de torção de 70Nm cuja tensão
admissível ao cisalhamento é 30MPa.
Resposta: 22,8mm
2) Um eixo de 78mm de diâmetro está submetido a um momento de torção de 6kN.m.
Determinar a tensão máxima de cisalhamento no eixo.
Resposta: MPa4,64max
3) Determinar a tensão de cisalhamento máxima e mínima em um eixo vazado cujos diâmetros
interno e externo são, respectivamente 90mm e 120mm, sabendo-se que o momento de
torção atuante é de 20kN.m.
Respostas: MPa3,86max e MPam 7,64min
4) Um eixo de seção circular de diâmetro 44mm está submetido a um momento de torção de
1000 N.m. Calcular a tensão máxima de cisalhamento e o ângulo de torção correspondente a
1m de comprimento, sabendo-se que G = 80 GPa.
Respostas: MPa8,59max e rad034,0
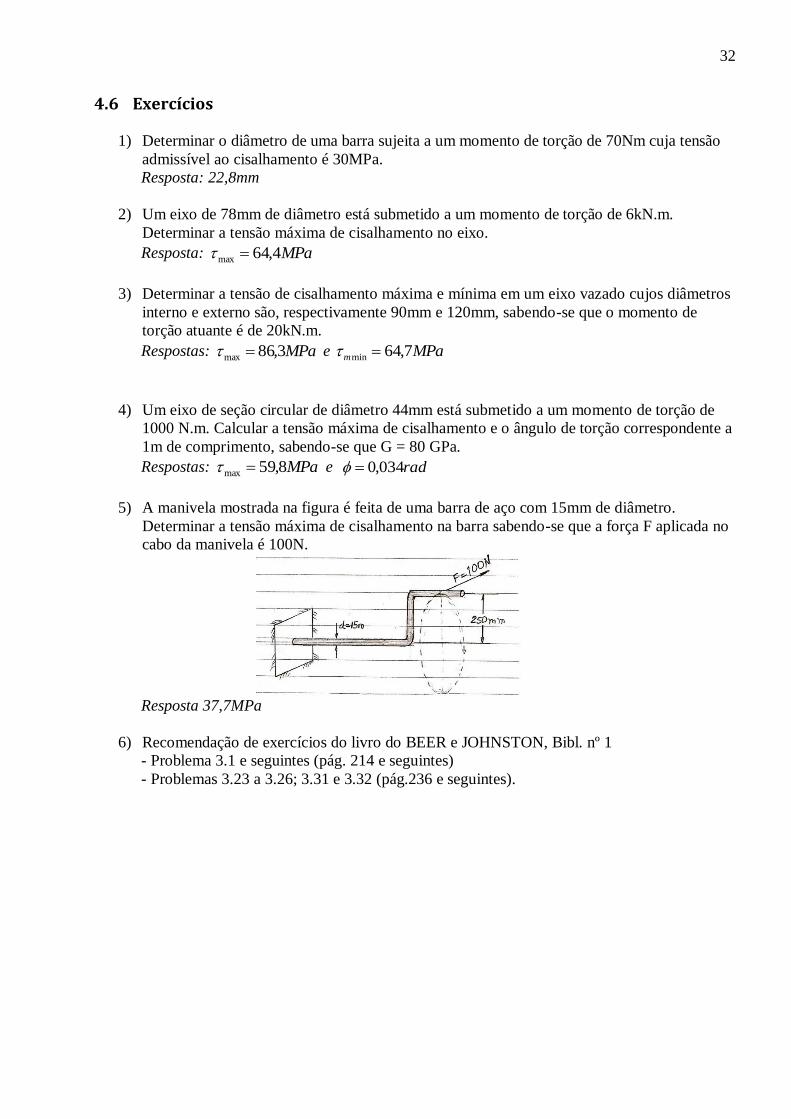
5) A manivela mostrada na figura é feita de uma barra de aço com 15mm de diâmetro.
Determinar a tensão máxima de cisalhamento na barra sabendo-se que a força F aplicada no
cabo da manivela é 100N.
Resposta 37,7MPa
6) Recomendação de exercícios do livro do BEER e JOHNSTON, Bibl. nº 1
- Problema 3.1 e seguintes (pág. 214 e seguintes)
- Problemas 3.23 a 3.26; 3.31 e 3.32 (pág.236 e seguintes).

33
4.7 Equações e diagramas do momento de torção
Quando numa barra se aplica um único momento de torção, agindo em sua extremidade,
como o caso da Figura 14, todas suas seções transversais estarão sujeitas a um mesmo momento de
torção interno. Entretanto, no caso de existirem vários momentos de torção externos aplicados ao
longo comprimento da barra, os momentos de torção internos não serão iguais para todas as seções
transversais.
Da mesma forma que fizemos para as forças normais podemos, neste caso, desenvolver as
equações e diagramas dos momentos de torção, os quais mostrarão qual é o momento de torção
interno que atua em qualquer seção transversal da barra.
Seja, por exemplo, a barra AC mostrada na Figura 17, submetida aos momentos de torção
externos AT , BT e CT . Observar que como a barra AC está em equilíbrio então ∑ 𝑇 = 0, isto é,
𝑇𝐴 − 𝑇𝐵 + 𝑇𝐶 = 𝑂.
O momento de torção que atua nas seções transversais do trecho AB é constante. Também
no trecho BC todas as seções transversais estão submetidas ao mesmo momento de torção, porém,
de valor diferente ao do trecho AB.
Figura 17
Antes de escrever as equações dos momentos de torção vamos definir uma convenção de
sinais.
Estabeleceremos que se a origem O dos eixos de coordenadas estiver na extremidade
esquerda da barra então todos os momentos, cujos vetores tem sentidos para a direita (segundo a
regra da mão direita), são positivos. Logo, se o momento de torção tiver sentido para a esquerda,
será negativo. Veja a Figura 18.
Figura 18
Para escrever a equação dos momentos de torção T devemos primeiro colocar : T . Na
frente do sinal de igualdade lançamos os valores de todos os momentos de torção externos (com seu
respectivo sinal convencionado) que estão à esquerda da seção considerada (que está à distância x).
Temos então para a barra da Figura 17:
Trecho AB: ax 0
ATT
Trecho BC: )( baxa
BA TTT
34
Tendo-se as equações dos momentos de torção podemos então desenhar o seu diagrama
lançando no eixo das abscissas a posição x da seção transversal e no eixo das ordenadas o valor do
momento de torção T.
Exercício resolvido
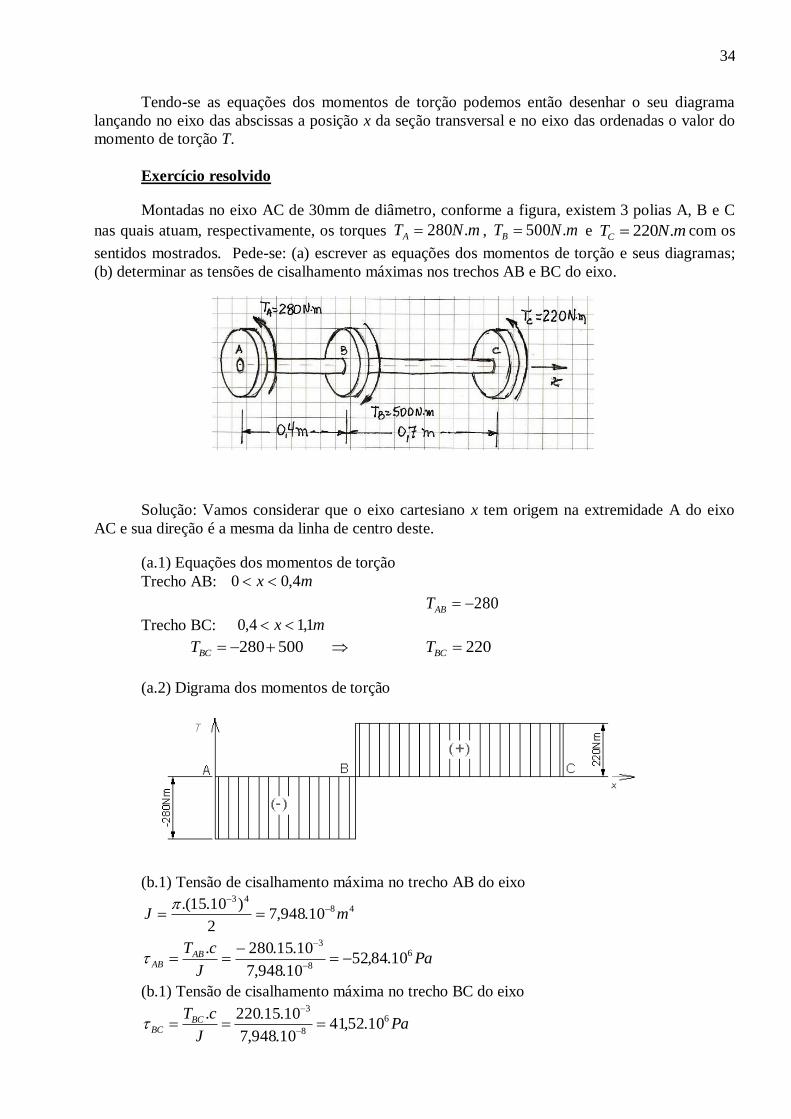
Montadas no eixo AC de 30mm de diâmetro, conforme a figura, existem 3 polias A, B e C
nas quais atuam, respectivamente, os torques mNTA .280 , mNTB .500 e mNTC .220 com os
sentidos mostrados. Pede-se: (a) escrever as equações dos momentos de torção e seus diagramas;
(b) determinar as tensões de cisalhamento máximas nos trechos AB e BC do eixo.
Solução: Vamos considerar que o eixo cartesiano x tem origem na extremidade A do eixo
AC e sua direção é a mesma da linha de centro deste.
(a.1) Equações dos momentos de torção
Trecho AB: mx 4,00
280ABT
Trecho BC: mx 1,14,0
500280BCT 220BCT
(a.2) Digrama dos momentos de torção
(b.1) Tensão de cisalhamento máxima no trecho AB do eixo
4843
10.948,72
)10.15.(mJ
PaJ
cTABAB
6
8
3
10.84,5210.948,7
10.15.280.
(b.1) Tensão de cisalhamento máxima no trecho BC do eixo
PaJ
cTBCBC
6
8
3
10.52,4110.948,7
10.15.220.
35
4.8 Exercícios
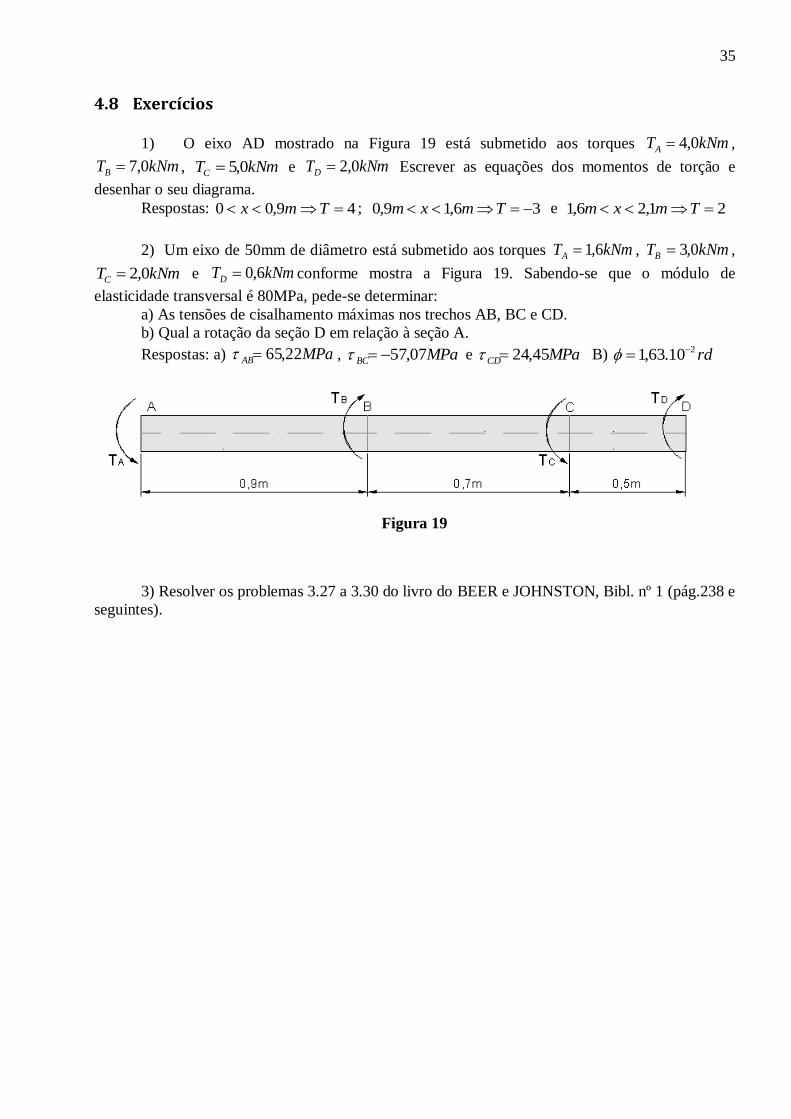
1) O eixo AD mostrado na Figura 19 está submetido aos torques kNmTA 0,4 ,
kNmTB 0,7 , kNmTC 0,5 e kNmTD 0,2 Escrever as equações dos momentos de torção e
desenhar o seu diagrama.
Respostas: 49,00 Tmx ; 36,19,0 Tmxm e 21,26,1 Tmxm
2) Um eixo de 50mm de diâmetro está submetido aos torques kNmTA 6,1 , kNmTB 0,3 ,
kNmTC 0,2 e kNmTD 6,0 conforme mostra a Figura 19. Sabendo-se que o módulo de
elasticidade transversal é 80MPa, pede-se determinar:
a) As tensões de cisalhamento máximas nos trechos AB, BC e CD.
b) Qual a rotação da seção D em relação à seção A.
Respostas: a) MPaAB 22,65 , MPaBC 07,57 e MPaCD 45,24 B) rd210.63,1
Figura 19
3) Resolver os problemas 3.27 a 3.30 do livro do BEER e JOHNSTON, Bibl. nº 1 (pág.238 e
seguintes).

36
4.9 Cálculo de eixo de transmissão*
O eixo de transmissão é um elemento de máquina que transmite torque e rotação de um
componente para outro. É o caso, por exemplo, do eixo cardã que transmite o movimento do motor
para o diferencial do caminhão.
No eixo de transmissão devemos considerar a potencia a ser transmitida e a velocidade de
rotação do eixo para que possamos dimensioná-lo.
Fórmula para determinação do momento de torção T
f
PT
..2
Onde
T é o momento de torção (N.m)
P é a potência transmitida ( watts: s
mNW
. )
f é a freqüência ou rps, ou hertz (1 sHz )
Conversão de unidades:
rpmHzrps 6011
s
mNWhp
.7467461
* Ver pag. 247 do BEER e JOHNSTON, Bibl. nº 1.
37
4.10 Exercícios
1) Um eixo de 5m de comprimento e 60mm de diâmetro gira a 300rpm. Sabendo-se que o
módulo de elasticidade transversal do material do eixo é G=77GPa e que o ângulo de
torção de eixo é 3° pede-se determinar: a) o momento de torção, b) a tensão máxima de
cisalhamento e c) a potência transmitida pelo eixo.
Respostas: a) NmT 1000 b) MPa6,23max c) WP 410.14,3
2) Um motor de 1800rpm está sujeito a um momento de torção de 5Nm. (a) Qual deve ser a
potência mínima do motor? (b) Se este motor está acionando um eixo de 10mm de
diâmetro e 3m de comprimento pede-se determinar o ângulo de torção deste eixo
sabendo-se que G=80GPa.
Respostas: (a) 942W ou 1,26hp; (b) 0,19rd ou 11°
3) Determinar o diâmetro do eixo de um motor de 3hp e 3600rpm sabendo-se que a tensão
admissível ao cisalhamento do material do eixo é 60MPa.
Resposta: 8mm
4) Um eixo de 6m de comprimento feito de tubo com 60mm de diâmetro externo e parede
de 17mm, gira a 240rpm. Sabendo-se que o ângulo de torção é 3,5° e que G=80GPa
pede-se determinar: a) a potência que está sendo transmitida; b) a máxima tensão de
cisalhamento no eixo.
Respostas: a) P=25kW, b) MPa4,24max
5) Recomendação de exercícios: Problemas do livro do BEER e JOHNSTON, Bibl. nº 1
paginas 255 e seguintes.
38
5 FLEXÃO
5.1 Vigas Viga é uma barra que suporta cargas transversais em relação ao seu eixo. Estudaremos, de
início, somente vigas cujas seções transversais são invariáveis (vigas prismáticas) e que possuem
eixo de simetria vertical. As cargas aplicadas serão consideradas como atuantes no plano vertical
formado pelo eixo de simetria vertical da seção transversal e o eixo da viga, acarretando, portanto,
flexão neste plano.
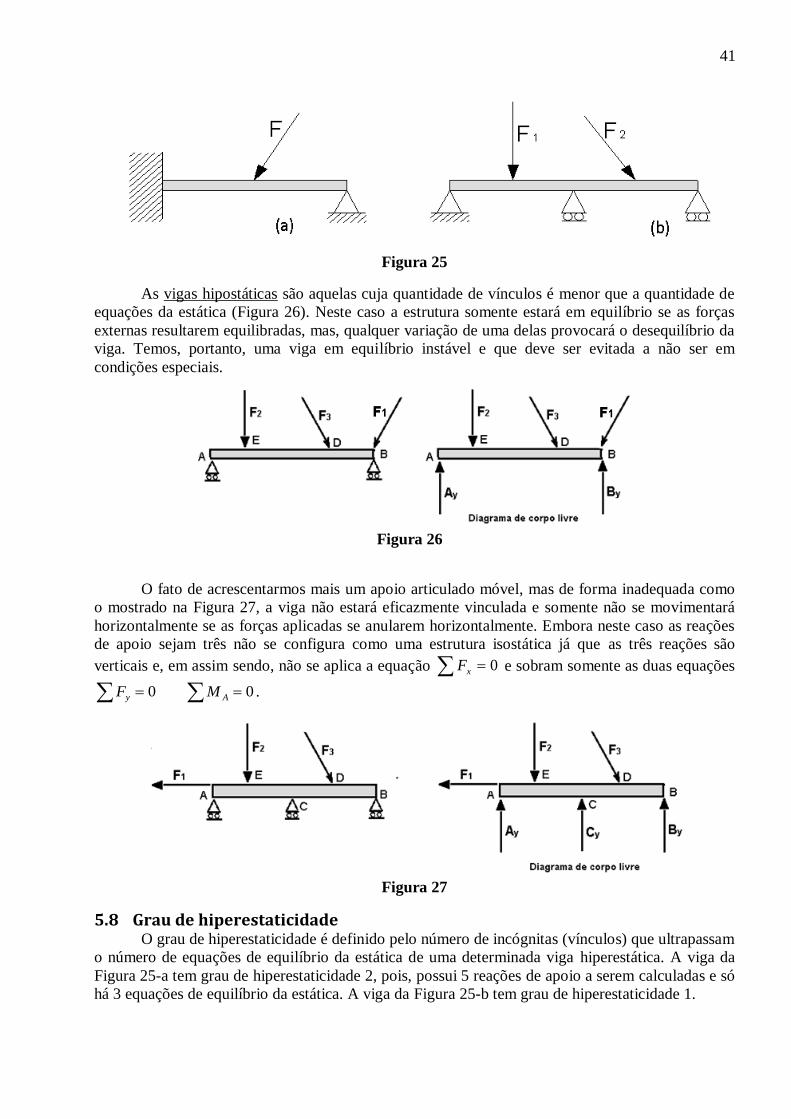
5.2 Tipos de apoios das vigas As vigas podem ser vinculadas a apoios de vários tipos:
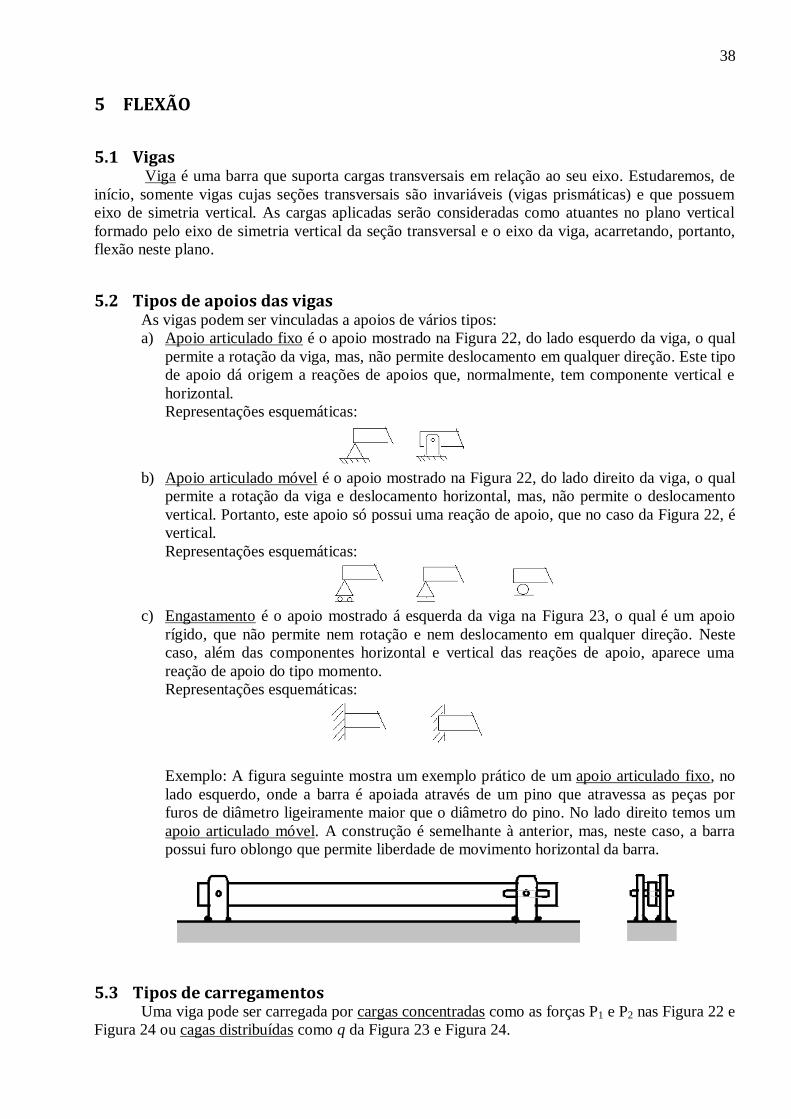
a) Apoio articulado fixo é o apoio mostrado na Figura 22, do lado esquerdo da viga, o qual
permite a rotação da viga, mas, não permite deslocamento em qualquer direção. Este tipo
de apoio dá origem a reações de apoios que, normalmente, tem componente vertical e
horizontal.
Representações esquemáticas:
b) Apoio articulado móvel é o apoio mostrado na Figura 22, do lado direito da viga, o qual
permite a rotação da viga e deslocamento horizontal, mas, não permite o deslocamento
vertical. Portanto, este apoio só possui uma reação de apoio, que no caso da Figura 22, é
vertical.
Representações esquemáticas:
c) Engastamento é o apoio mostrado á esquerda da viga na Figura 23, o qual é um apoio
rígido, que não permite nem rotação e nem deslocamento em qualquer direção. Neste
caso, além das componentes horizontal e vertical das reações de apoio, aparece uma
reação de apoio do tipo momento.
Representações esquemáticas:
Exemplo: A figura seguinte mostra um exemplo prático de um apoio articulado fixo, no
lado esquerdo, onde a barra é apoiada através de um pino que atravessa as peças por
furos de diâmetro ligeiramente maior que o diâmetro do pino. No lado direito temos um
apoio articulado móvel. A construção é semelhante à anterior, mas, neste caso, a barra
possui furo oblongo que permite liberdade de movimento horizontal da barra.
5.3 Tipos de carregamentos Uma viga pode ser carregada por cargas concentradas como as forças P1 e P2 nas Figura 22 e
Figura 24 ou cagas distribuídas como q da Figura 23 e Figura 24.
39
As cargas distribuídas são caracterizadas pela taxa de carregamento que é expressa em
unidade de força por unidade de comprimento ao longo do eixo da viga. Esta taxa de carregamento
pode ser constante como a da Figura 23 e Figura 24 ou pode ser variável.
Além de forças, uma viga pode, também, ser sujeita a momentos ou binários como o
momento M mostrado na Figura 22.
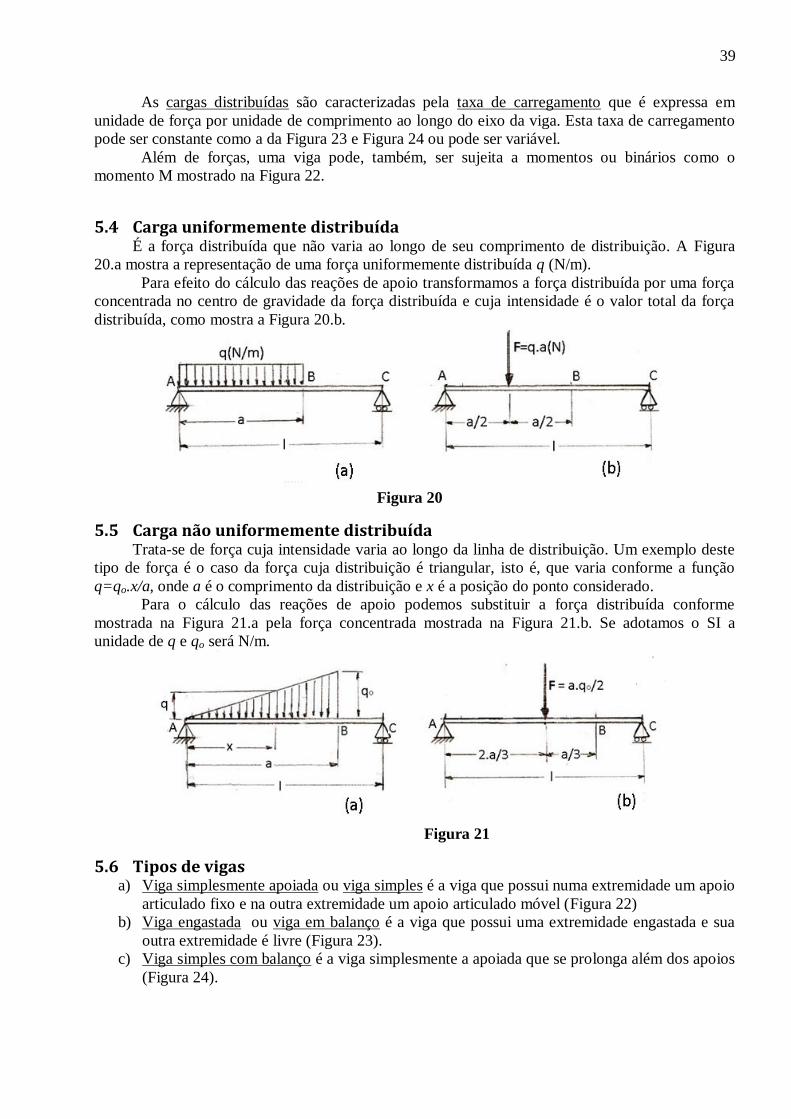
5.4 Carga uniformemente distribuída É a força distribuída que não varia ao longo de seu comprimento de distribuição. A Figura
20.a mostra a representação de uma força uniformemente distribuída q (N/m).
Para efeito do cálculo das reações de apoio transformamos a força distribuída por uma força
concentrada no centro de gravidade da força distribuída e cuja intensidade é o valor total da força
distribuída, como mostra a Figura 20.b.
Figura 20
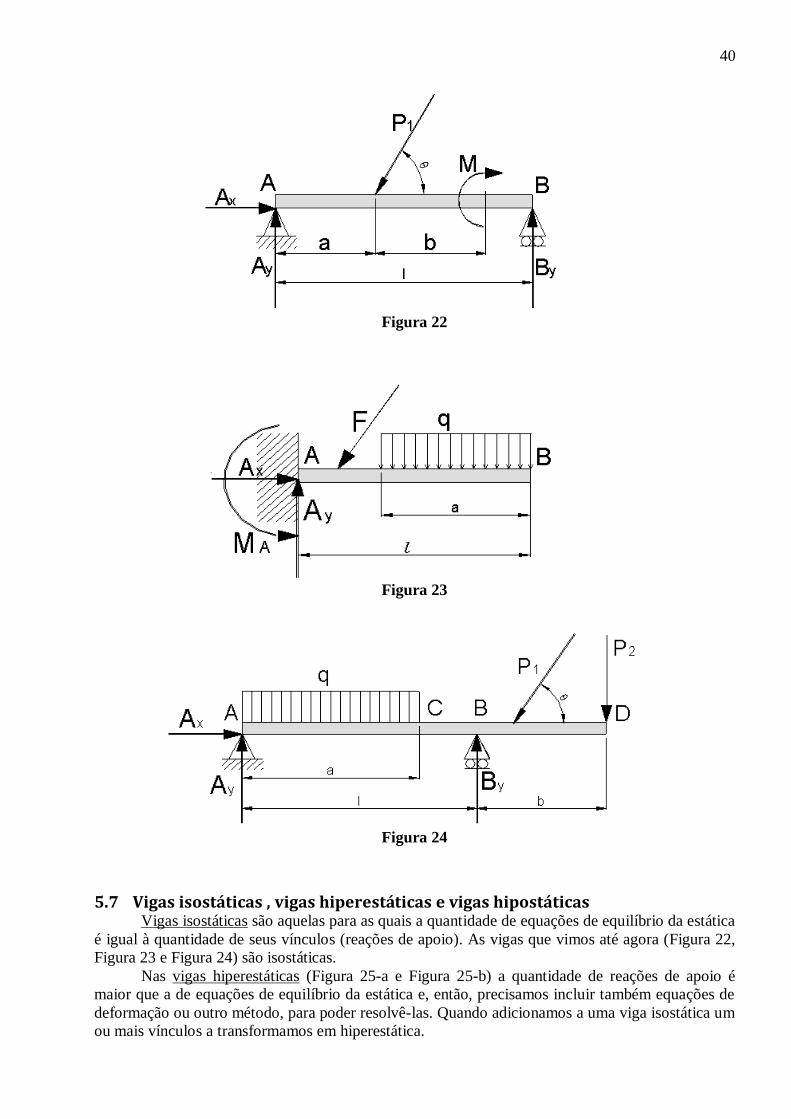
5.5 Carga não uniformemente distribuída Trata-se de força cuja intensidade varia ao longo da linha de distribuição. Um exemplo deste
tipo de força é o caso da força cuja distribuição é triangular, isto é, que varia conforme a função
q=qo.x/a, onde a é o comprimento da distribuição e x é a posição do ponto considerado.
Para o cálculo das reações de apoio podemos substituir a força distribuída conforme
mostrada na Figura 21.a pela força concentrada mostrada na Figura 21.b. Se adotamos o SI a
unidade de q e qo será N/m.
Figura 21
5.6 Tipos de vigas a) Viga simplesmente apoiada ou viga simples é a viga que possui numa extremidade um apoio
articulado fixo e na outra extremidade um apoio articulado móvel (Figura 22)
b) Viga engastada ou viga em balanço é a viga que possui uma extremidade engastada e sua
outra extremidade é livre (Figura 23).
c) Viga simples com balanço é a viga simplesmente a apoiada que se prolonga além dos apoios
(Figura 24).
40
Figura 22
Figura 23
Figura 24
5.7 Vigas isostáticas , vigas hiperestáticas e vigas hipostáticas Vigas isostáticas são aquelas para as quais a quantidade de equações de equilíbrio da estática
é igual à quantidade de seus vínculos (reações de apoio). As vigas que vimos até agora (Figura 22,
Figura 23 e Figura 24) são isostáticas.
Nas vigas hiperestáticas (Figura 25-a e Figura 25-b) a quantidade de reações de apoio é
maior que a de equações de equilíbrio da estática e, então, precisamos incluir também equações de
deformação ou outro método, para poder resolvê-las. Quando adicionamos a uma viga isostática um
ou mais vínculos a transformamos em hiperestática.
41
Figura 25
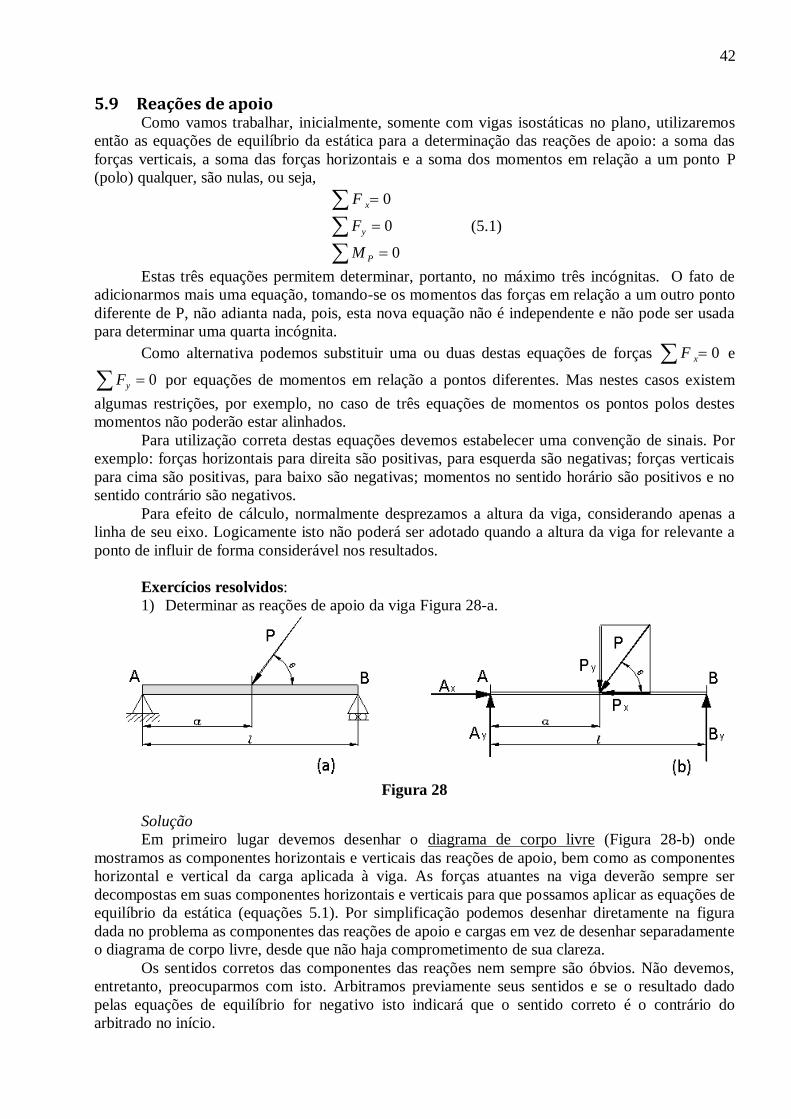
As vigas hipostáticas são aquelas cuja quantidade de vínculos é menor que a quantidade de
equações da estática (Figura 26). Neste caso a estrutura somente estará em equilíbrio se as forças
externas resultarem equilibradas, mas, qualquer variação de uma delas provocará o desequilíbrio da
viga. Temos, portanto, uma viga em equilíbrio instável e que deve ser evitada a não ser em
condições especiais.
Figura 26
O fato de acrescentarmos mais um apoio articulado móvel, mas de forma inadequada como
o mostrado na Figura 27, a viga não estará eficazmente vinculada e somente não se movimentará
horizontalmente se as forças aplicadas se anularem horizontalmente. Embora neste caso as reações
de apoio sejam três não se configura como uma estrutura isostática já que as três reações são
verticais e, em assim sendo, não se aplica a equação 0xF e sobram somente as duas equações
00 Ay MF .
Figura 27
5.8 Grau de hiperestaticidade O grau de hiperestaticidade é definido pelo número de incógnitas (vínculos) que ultrapassam
o número de equações de equilíbrio da estática de uma determinada viga hiperestática. A viga da
Figura 25-a tem grau de hiperestaticidade 2, pois, possui 5 reações de apoio a serem calculadas e só
há 3 equações de equilíbrio da estática. A viga da Figura 25-b tem grau de hiperestaticidade 1.
42
5.9 Reações de apoio Como vamos trabalhar, inicialmente, somente com vigas isostáticas no plano, utilizaremos
então as equações de equilíbrio da estática para a determinação das reações de apoio: a soma das
forças verticais, a soma das forças horizontais e a soma dos momentos em relação a um ponto P
(polo) qualquer, são nulas, ou seja,
0xF
0yF (5.1)
0PM
Estas três equações permitem determinar, portanto, no máximo três incógnitas. O fato de
adicionarmos mais uma equação, tomando-se os momentos das forças em relação a um outro ponto
diferente de P, não adianta nada, pois, esta nova equação não é independente e não pode ser usada
para determinar uma quarta incógnita.
Como alternativa podemos substituir uma ou duas destas equações de forças 0xF e
0yF por equações de momentos em relação a pontos diferentes. Mas nestes casos existem
algumas restrições, por exemplo, no caso de três equações de momentos os pontos polos destes
momentos não poderão estar alinhados.
Para utilização correta destas equações devemos estabelecer uma convenção de sinais. Por
exemplo: forças horizontais para direita são positivas, para esquerda são negativas; forças verticais
para cima são positivas, para baixo são negativas; momentos no sentido horário são positivos e no
sentido contrário são negativos.
Para efeito de cálculo, normalmente desprezamos a altura da viga, considerando apenas a
linha de seu eixo. Logicamente isto não poderá ser adotado quando a altura da viga for relevante a
ponto de influir de forma considerável nos resultados.
Exercícios resolvidos:
1) Determinar as reações de apoio da viga Figura 28-a.
Figura 28
Solução
Em primeiro lugar devemos desenhar o diagrama de corpo livre (Figura 28-b) onde
mostramos as componentes horizontais e verticais das reações de apoio, bem como as componentes
horizontal e vertical da carga aplicada à viga. As forças atuantes na viga deverão sempre ser
decompostas em suas componentes horizontais e verticais para que possamos aplicar as equações de
equilíbrio da estática (equações 5.1). Por simplificação podemos desenhar diretamente na figura
dada no problema as componentes das reações de apoio e cargas em vez de desenhar separadamente
o diagrama de corpo livre, desde que não haja comprometimento de sua clareza.
Os sentidos corretos das componentes das reações nem sempre são óbvios. Não devemos,
entretanto, preocuparmos com isto. Arbitramos previamente seus sentidos e se o resultado dado
pelas equações de equilíbrio for negativo isto indicará que o sentido correto é o contrário do
arbitrado no início.
43
Outra atitude importante nesta fase inicial do exercício é fazermos a homogeneização das
unidades. Se adotarmos a mesma unidade para todas as forças do exercício e a mesma unidade para
todas as medidas de comprimento, etc., então poderemos colocar as grandezas, sem suas unidades,
nas equações, simplificando-as. Por exemplo, se adotarmos para todas as força dadas no exercício a
unidade kN e todas as medidas de comprimento a unidade m, então as forças calculadas serão em kN
e os momentos em kN.m .
Agora podemos escrever as equações de equilíbrio da estática, mas, lembrando sempre de,
no início de cada equação, mostrarmos a convenção de sinal que adotamos. Não importa a
convenção adotada desde que a respeitemos para toda equação.
0xF 0cos. PAx (1)
0yF 0. senPBA yy (2)
Para a equação de equilíbrio dos momentos devemos convencionar o sentido positivo de
rotação e também o ponto em relação ao qual tomaremos os momentos das forças. O ponto de
referência dos momentos poderá ser qualquer um no plano da figura, porém, é interessante escolher
um dos pontos onde atuam as reações de apoio, pois, desta forma, estaremos anulando os momentos
correspondentes destas reações, simplificando as equações. Neste exercício escolhemos o ponto A.
( 0AM 0)..( asenPlBy (3)
Pela equação (3) obtemos
l
asenPBy
).(
Substituindo este valor de yB na equação (2) determinamos a reação
yA
l
asenPsenPAy
).(.
donde
l
alsenPAy )(
Pela equação (1) obtemos cos.PAx
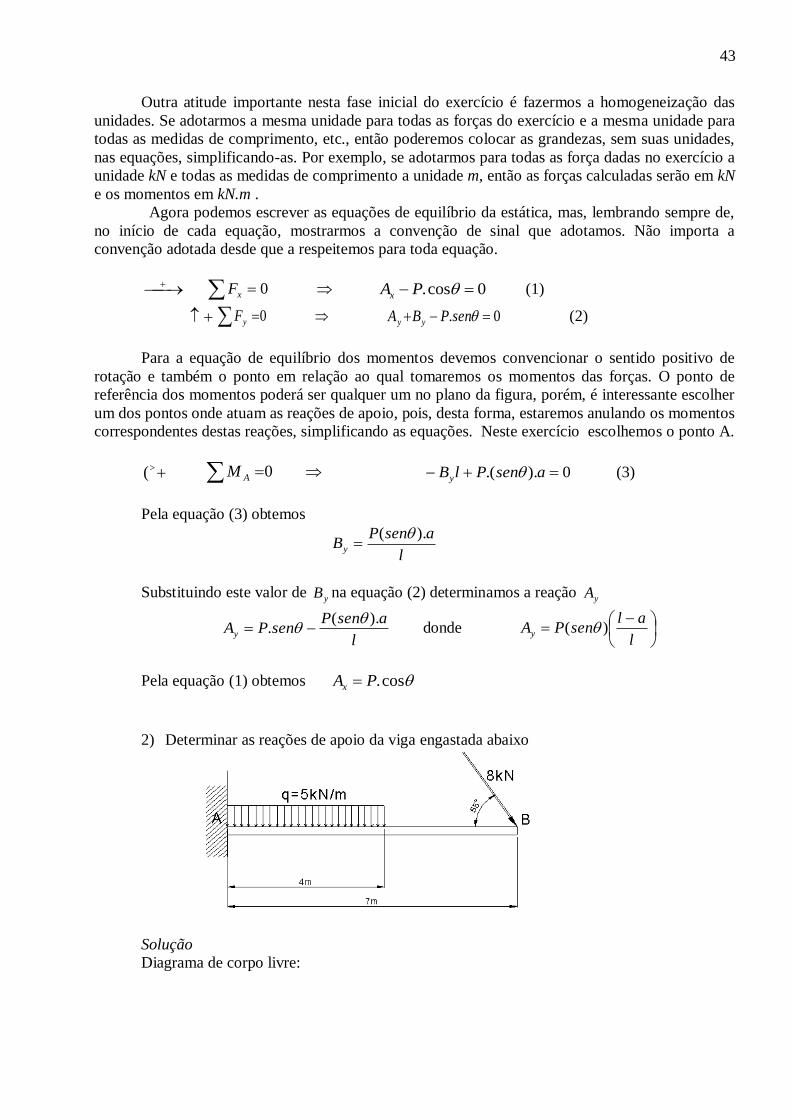
2) Determinar as reações de apoio da viga engastada abaixo
Solução
Diagrama de corpo livre:
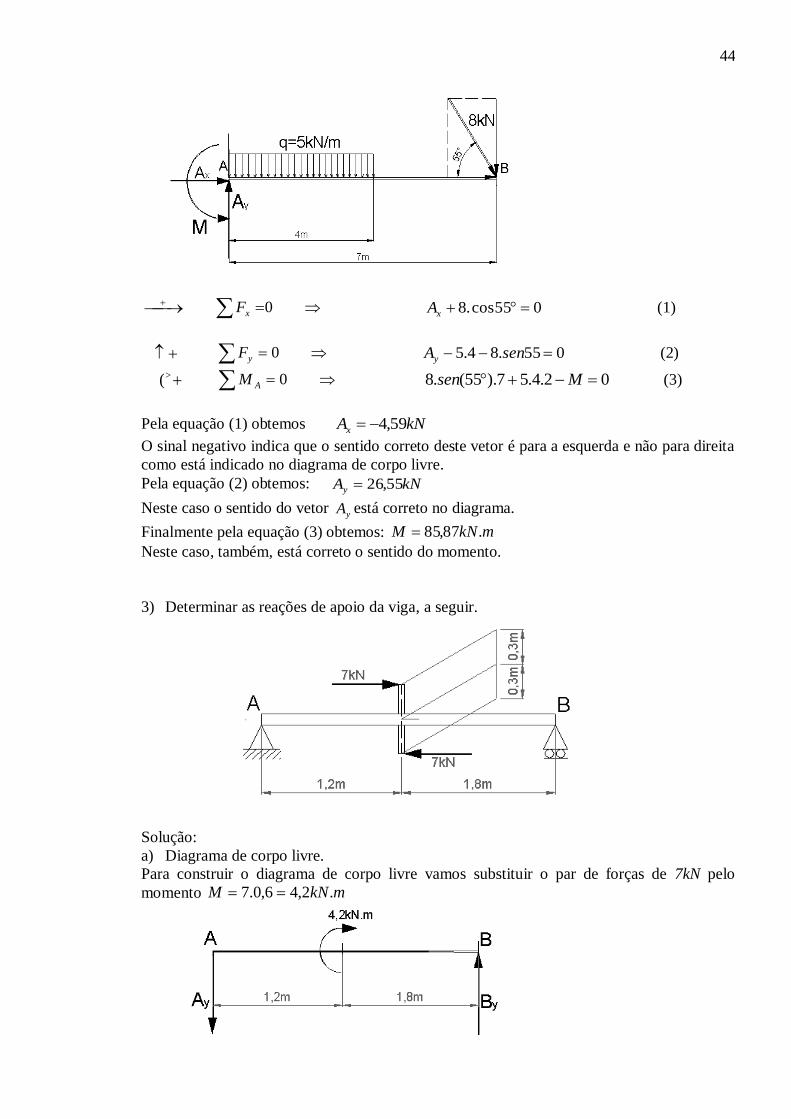
44
0xF 055cos.8 xA (1)
0yF 055.84.5 senAy (2)
( 0AM 02.4.57).55(.8 Msen (3)
Pela equação (1) obtemos kNAx 59,4
O sinal negativo indica que o sentido correto deste vetor é para a esquerda e não para direita
como está indicado no diagrama de corpo livre.
Pela equação (2) obtemos: kNAy 55,26
Neste caso o sentido do vetor yA está correto no diagrama.
Finalmente pela equação (3) obtemos: mkNM .87,85
Neste caso, também, está correto o sentido do momento.
3) Determinar as reações de apoio da viga, a seguir.
Solução:
a) Diagrama de corpo livre.
Para construir o diagrama de corpo livre vamos substituir o par de forças de 7kN pelo
momento mkNM .2,46,0.7
45
b) Reações de apoio
0yF 0 yy BA (1)
( 0BM 02,43 yA (2)
Resolvendo obtemos:
kNBA yy 4,1
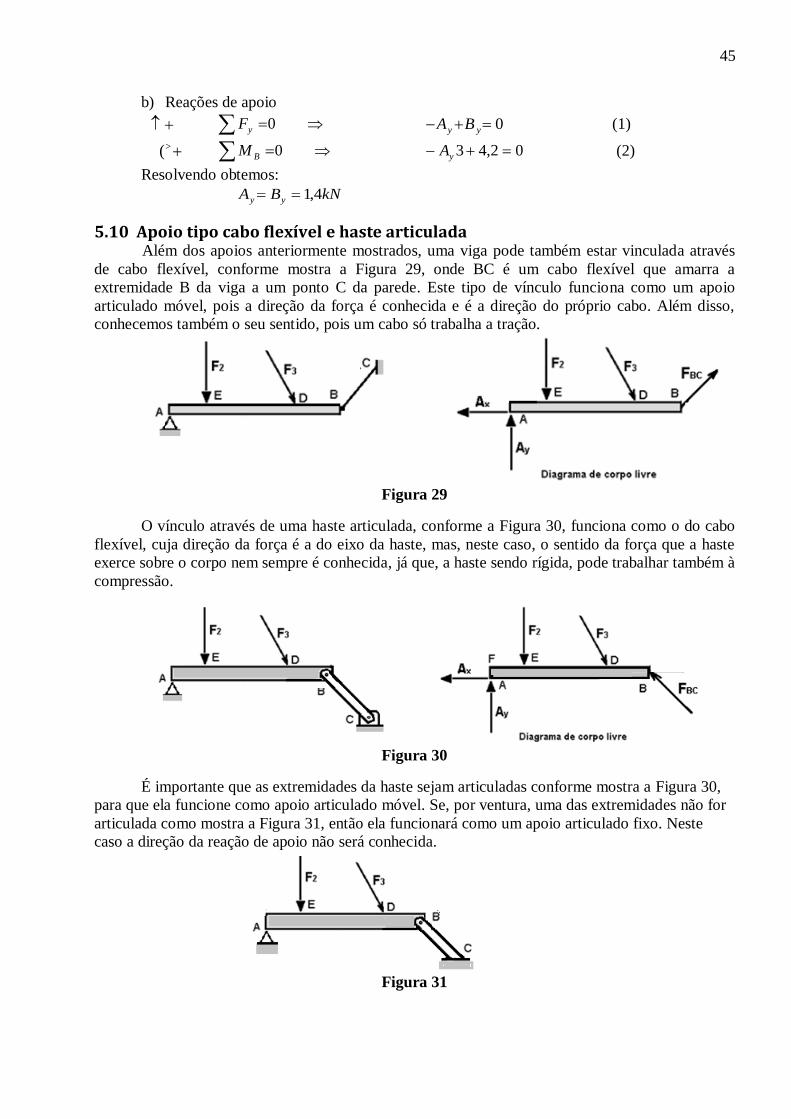
5.10 Apoio tipo cabo flexível e haste articulada Além dos apoios anteriormente mostrados, uma viga pode também estar vinculada através
de cabo flexível, conforme mostra a Figura 29, onde BC é um cabo flexível que amarra a
extremidade B da viga a um ponto C da parede. Este tipo de vínculo funciona como um apoio
articulado móvel, pois a direção da força é conhecida e é a direção do próprio cabo. Além disso,
conhecemos também o seu sentido, pois um cabo só trabalha a tração.
Figura 29
O vínculo através de uma haste articulada, conforme a Figura 30, funciona como o do cabo
flexível, cuja direção da força é a do eixo da haste, mas, neste caso, o sentido da força que a haste
exerce sobre o corpo nem sempre é conhecida, já que, a haste sendo rígida, pode trabalhar também à
compressão.
Figura 30
É importante que as extremidades da haste sejam articuladas conforme mostra a Figura 30,
para que ela funcione como apoio articulado móvel. Se, por ventura, uma das extremidades não for
articulada como mostra a Figura 31, então ela funcionará como um apoio articulado fixo. Neste
caso a direção da reação de apoio não será conhecida.
Figura 31
46
5.11 Exercício resolvido Determinar as reações de apoio da seguinte viga, sendo BC um cabo flexível.
Solução.
Primeiro passo, desenhamos o diagrama de corpo livre mostrado na figura à direita.
Segundo passo, determinamos as componentes das forças inclinadas.
𝐷𝑥 = 27𝑐𝑜𝑠58° = 14,3𝑘𝑁 𝐷𝑦 = 27𝑠𝑒𝑛58° = 22,9𝑘𝑁
𝐵𝑥 = 𝐵𝑐𝑜𝑠35° 𝐵𝑦 = 𝐵𝑠𝑒𝑛35°
Terceiro passo, escrevemos as equações de equilíbrio.
→ + ∑ 𝐹𝑥 = 0 => −𝐴𝑥 + 𝐵𝑥 = 0 => 𝐴𝑥 = 𝐵𝑐𝑜𝑠35° (1) ↑ + ∑ 𝐹𝑦 = 0 => 𝐴𝑦 − 14 − 22,9 + 𝐵𝑠𝑒𝑛35° = 0 => 𝐴𝑦 + 𝐵𝑠𝑒𝑛35° = 36,9 (2)
(>+ ∑ MB = 0 => 𝐴𝑦6 − 14.5 − 22,9.2 = 0 => 𝐴𝑦 = 19,3𝑘𝑁
Substituímos este valor de Ay na equação (2) e obtemos
𝐵 = 30,7𝑘𝑁 Pela equação (1) obtemos 𝐴𝑥 = 25,1𝑘𝑁
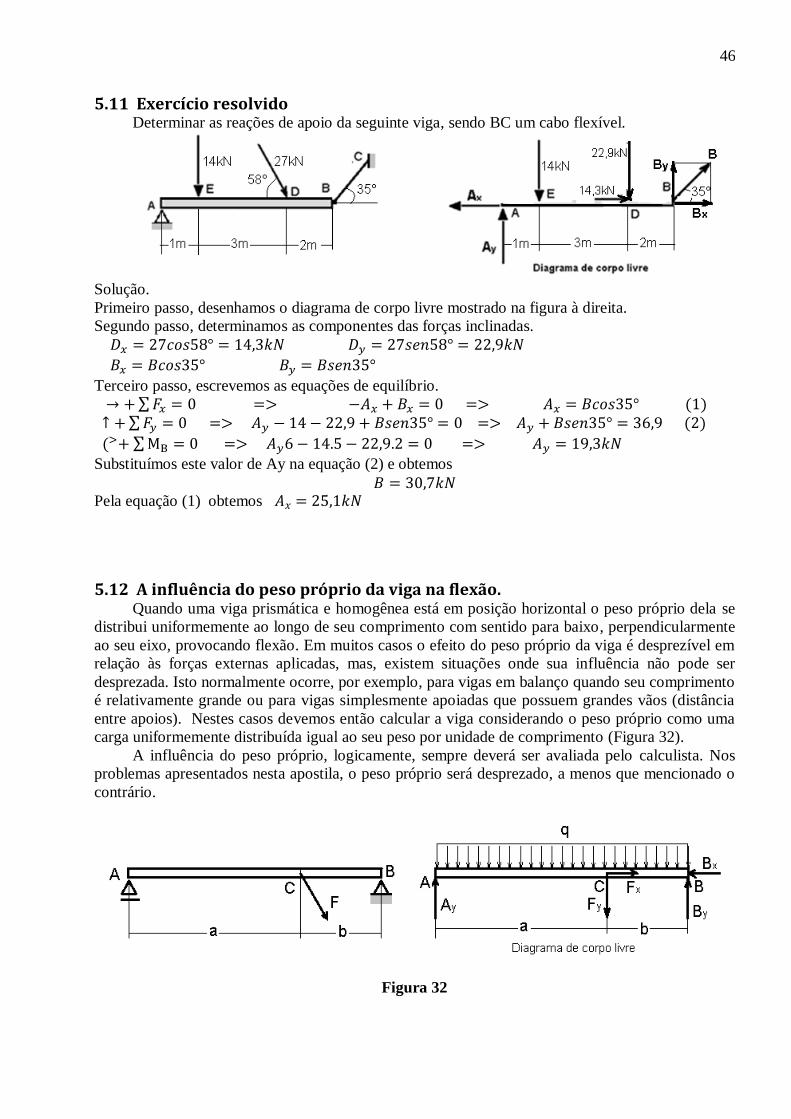
5.12 A influência do peso próprio da viga na flexão. Quando uma viga prismática e homogênea está em posição horizontal o peso próprio dela se
distribui uniformemente ao longo de seu comprimento com sentido para baixo, perpendicularmente
ao seu eixo, provocando flexão. Em muitos casos o efeito do peso próprio da viga é desprezível em
relação às forças externas aplicadas, mas, existem situações onde sua influência não pode ser
desprezada. Isto normalmente ocorre, por exemplo, para vigas em balanço quando seu comprimento
é relativamente grande ou para vigas simplesmente apoiadas que possuem grandes vãos (distância
entre apoios). Nestes casos devemos então calcular a viga considerando o peso próprio como uma
carga uniformemente distribuída igual ao seu peso por unidade de comprimento (Figura 32).
A influência do peso próprio, logicamente, sempre deverá ser avaliada pelo calculista. Nos
problemas apresentados nesta apostila, o peso próprio será desprezado, a menos que mencionado o
contrário.
Figura 32
47
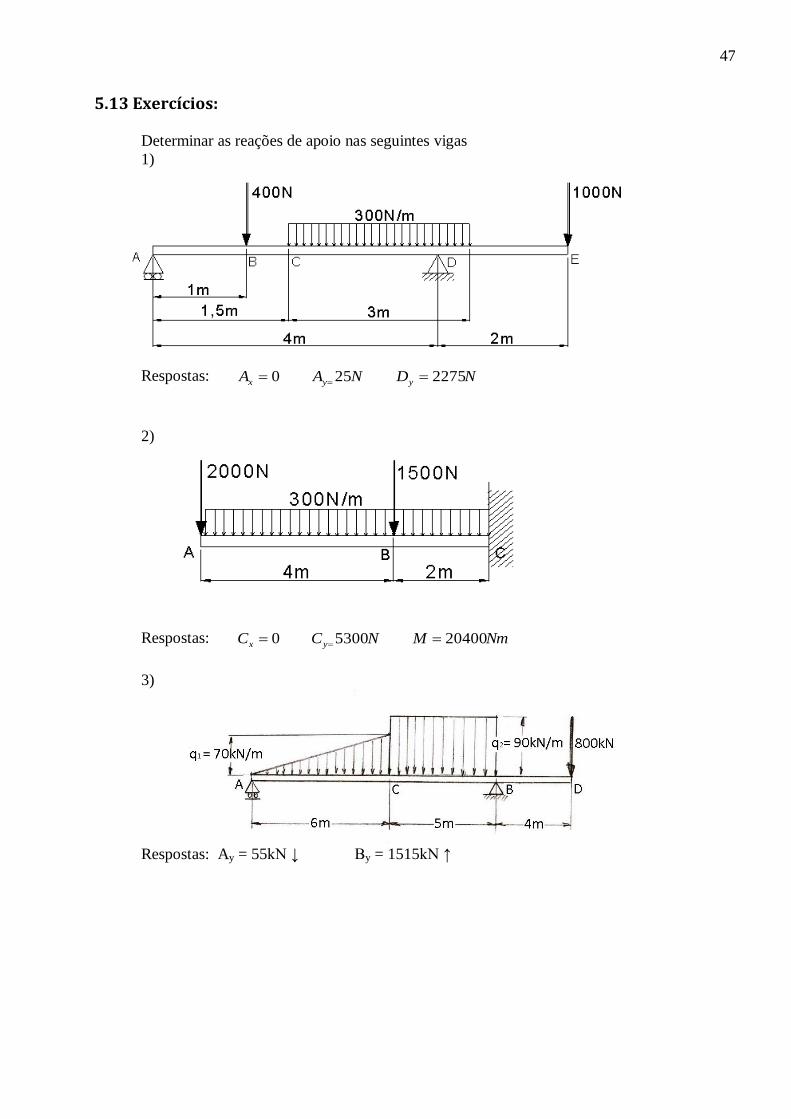
5.13 Exercícios:
Determinar as reações de apoio nas seguintes vigas
1)
Respostas: NDNAA yyx 2275250
2)
Respostas: NmMNCC yx 2040053000
3)
Respostas: Ay = 55kN ↓ By = 1515kN ↑

48
4)
Respostas: Ax = 40,29kN, Ay = 86,16kN e Tração no cabo FG = 66,65kN
5) Retomando o exercício nº 1 e considerando que o peso próprio da viga AE é 27kgf/m
determinar suas reações de apoio. (1kgf=10N)
Respostas: NDNAA yyx 34904300
49
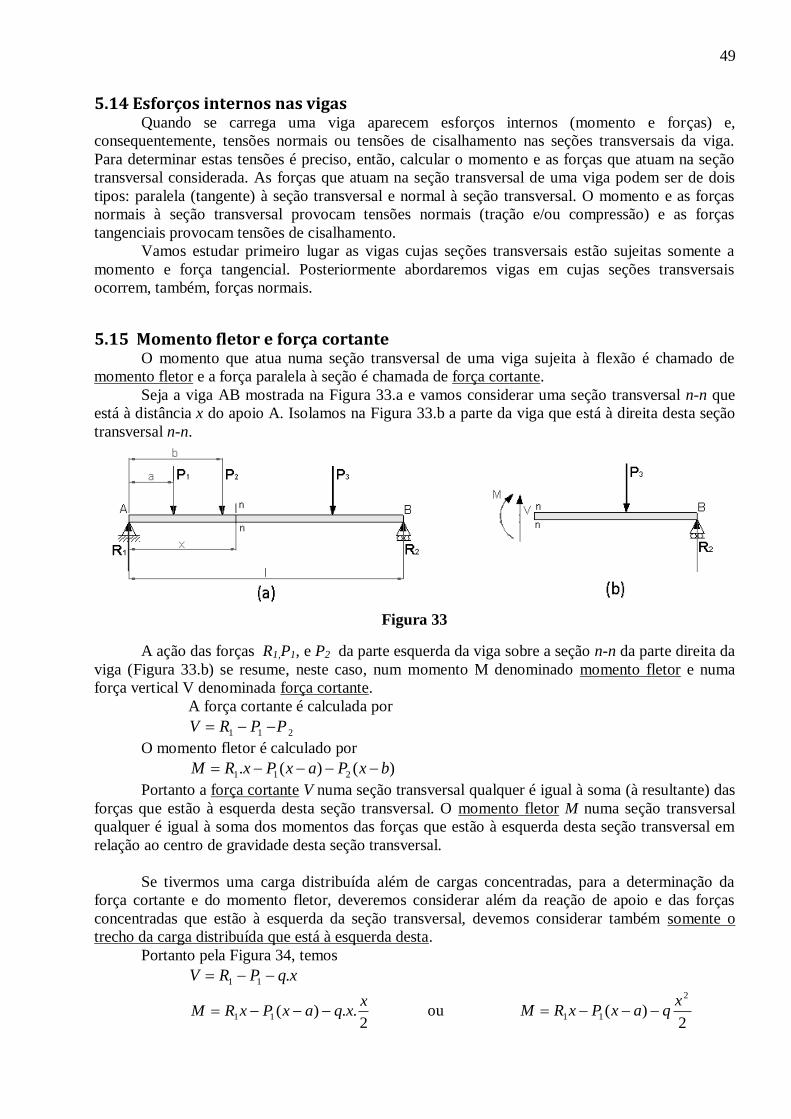
5.14 Esforços internos nas vigas Quando se carrega uma viga aparecem esforços internos (momento e forças) e,
consequentemente, tensões normais ou tensões de cisalhamento nas seções transversais da viga.
Para determinar estas tensões é preciso, então, calcular o momento e as forças que atuam na seção
transversal considerada. As forças que atuam na seção transversal de uma viga podem ser de dois
tipos: paralela (tangente) à seção transversal e normal à seção transversal. O momento e as forças
normais à seção transversal provocam tensões normais (tração e/ou compressão) e as forças
tangenciais provocam tensões de cisalhamento.
Vamos estudar primeiro lugar as vigas cujas seções transversais estão sujeitas somente a
momento e força tangencial. Posteriormente abordaremos vigas em cujas seções transversais
ocorrem, também, forças normais.
5.15 Momento fletor e força cortante O momento que atua numa seção transversal de uma viga sujeita à flexão é chamado de
momento fletor e a força paralela à seção é chamada de força cortante.
Seja a viga AB mostrada na Figura 33.a e vamos considerar uma seção transversal n-n que
está à distância x do apoio A. Isolamos na Figura 33.b a parte da viga que está à direita desta seção
transversal n-n.
Figura 33
A ação das forças R1,P1, e P2 da parte esquerda da viga sobre a seção n-n da parte direita da
viga (Figura 33.b) se resume, neste caso, num momento M denominado momento fletor e numa
força vertical V denominada força cortante.
A força cortante é calculada por
211 PPRV
O momento fletor é calculado por
)()(. 211 bxPaxPxRM
Portanto a força cortante V numa seção transversal qualquer é igual à soma (à resultante) das
forças que estão à esquerda desta seção transversal. O momento fletor M numa seção transversal
qualquer é igual à soma dos momentos das forças que estão à esquerda desta seção transversal em
relação ao centro de gravidade desta seção transversal.
Se tivermos uma carga distribuída além de cargas concentradas, para a determinação da
força cortante e do momento fletor, deveremos considerar além da reação de apoio e das forças
concentradas que estão à esquerda da seção transversal, devemos considerar também somente o
trecho da carga distribuída que está à esquerda desta.
Portanto pela Figura 34, temos
xqPRV .11
2..)(11
xxqaxPxRM ou
2)(
2
11
xqaxPxRM
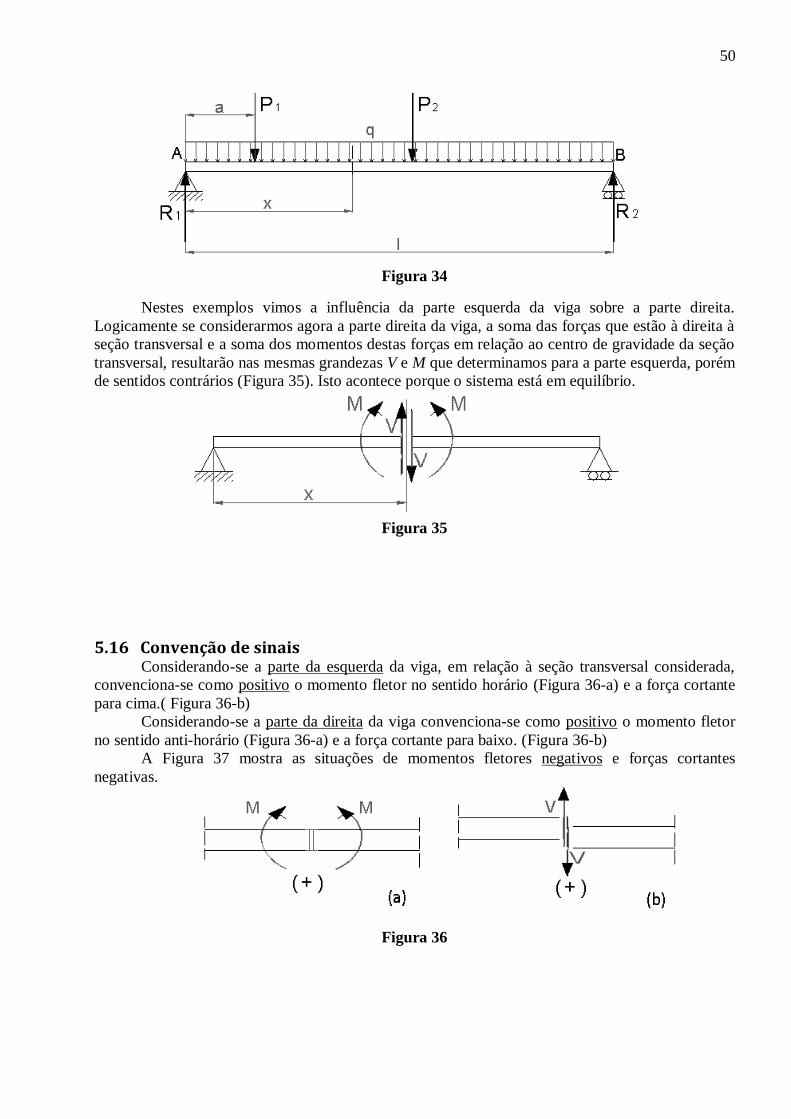
50
Figura 34
Nestes exemplos vimos a influência da parte esquerda da viga sobre a parte direita.
Logicamente se considerarmos agora a parte direita da viga, a soma das forças que estão à direita à
seção transversal e a soma dos momentos destas forças em relação ao centro de gravidade da seção
transversal, resultarão nas mesmas grandezas V e M que determinamos para a parte esquerda, porém
de sentidos contrários (Figura 35). Isto acontece porque o sistema está em equilíbrio.
Figura 35
5.16 Convenção de sinais Considerando-se a parte da esquerda da viga, em relação à seção transversal considerada,
convenciona-se como positivo o momento fletor no sentido horário (Figura 36-a) e a força cortante
para cima.( Figura 36-b)
Considerando-se a parte da direita da viga convenciona-se como positivo o momento fletor
no sentido anti-horário (Figura 36-a) e a força cortante para baixo. (Figura 36-b)
A Figura 37 mostra as situações de momentos fletores negativos e forças cortantes
negativas.
Figura 36
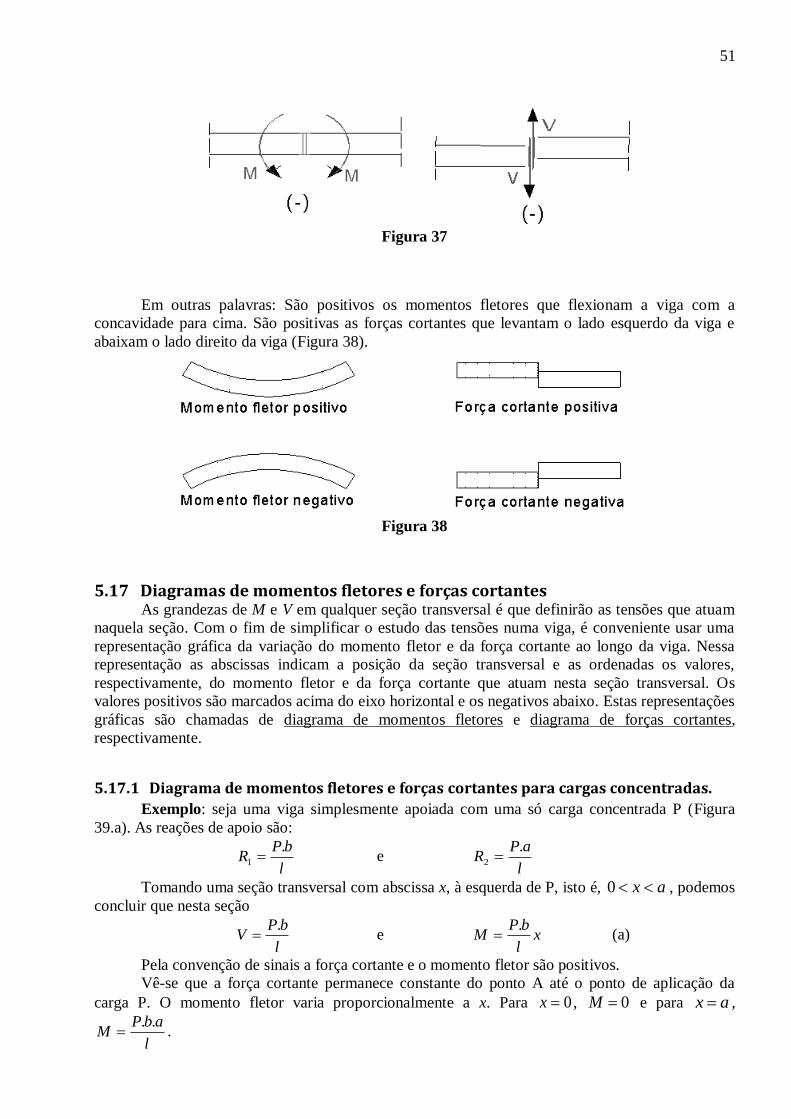
51
Figura 37
Em outras palavras: São positivos os momentos fletores que flexionam a viga com a
concavidade para cima. São positivas as forças cortantes que levantam o lado esquerdo da viga e
abaixam o lado direito da viga (Figura 38).
Figura 38
5.17 Diagramas de momentos fletores e forças cortantes As grandezas de M e V em qualquer seção transversal é que definirão as tensões que atuam
naquela seção. Com o fim de simplificar o estudo das tensões numa viga, é conveniente usar uma
representação gráfica da variação do momento fletor e da força cortante ao longo da viga. Nessa
representação as abscissas indicam a posição da seção transversal e as ordenadas os valores,
respectivamente, do momento fletor e da força cortante que atuam nesta seção transversal. Os
valores positivos são marcados acima do eixo horizontal e os negativos abaixo. Estas representações
gráficas são chamadas de diagrama de momentos fletores e diagrama de forças cortantes,
respectivamente.
5.17.1 Diagrama de momentos fletores e forças cortantes para cargas concentradas.
Exemplo: seja uma viga simplesmente apoiada com uma só carga concentrada P (Figura
39.a). As reações de apoio são:
l
bPR
.1 e
l
aPR
.2
Tomando uma seção transversal com abscissa x, à esquerda de P, isto é, ax 0 , podemos
concluir que nesta seção
l
bPV
. e x
l
bPM
. (a)
Pela convenção de sinais a força cortante e o momento fletor são positivos.
Vê-se que a força cortante permanece constante do ponto A até o ponto de aplicação da
carga P. O momento fletor varia proporcionalmente a x. Para 0x , 0M e para ax ,
l
abPM
.. .
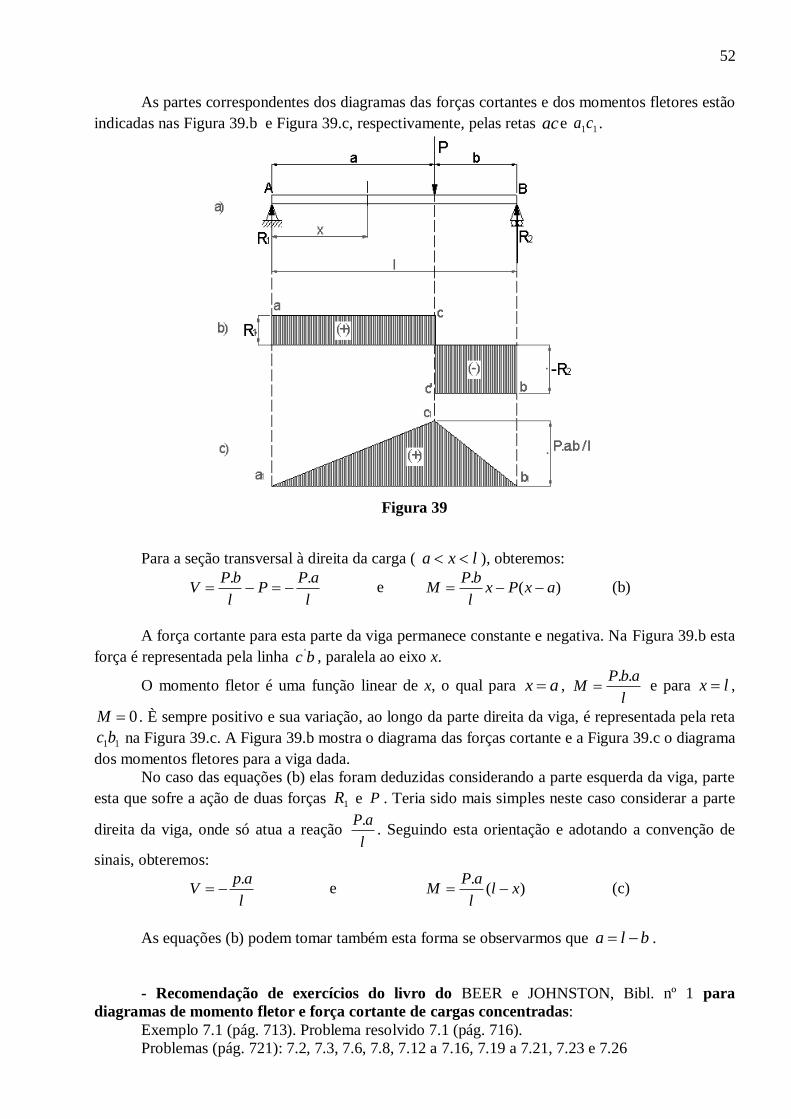
52
As partes correspondentes dos diagramas das forças cortantes e dos momentos fletores estão
indicadas nas Figura 39.b e Figura 39.c, respectivamente, pelas retas ace 11ca .
Figura 39
Para a seção transversal à direita da carga ( lxa ), obteremos:
l
aPP
l
bPV
.. e )(
.axPx
l
bPM (b)
A força cortante para esta parte da viga permanece constante e negativa. Na Figura 39.b esta
força é representada pela linha bc ' , paralela ao eixo x.
O momento fletor é uma função linear de x, o qual para ax , l
abPM
.. e para lx ,
0M . È sempre positivo e sua variação, ao longo da parte direita da viga, é representada pela reta
11bc na Figura 39.c. A Figura 39.b mostra o diagrama das forças cortante e a Figura 39.c o diagrama
dos momentos fletores para a viga dada.
No caso das equações (b) elas foram deduzidas considerando a parte esquerda da viga, parte
esta que sofre a ação de duas forças 1R e P . Teria sido mais simples neste caso considerar a parte
direita da viga, onde só atua a reação l
aP.. Seguindo esta orientação e adotando a convenção de
sinais, obteremos:
l
apV
. e )(
.xl
l
aPM (c)
As equações (b) podem tomar também esta forma se observarmos que bla .
- Recomendação de exercícios do livro do BEER e JOHNSTON, Bibl. nº 1 para
diagramas de momento fletor e força cortante de cargas concentradas:
Exemplo 7.1 (pág. 713). Problema resolvido 7.1 (pág. 716).
Problemas (pág. 721): 7.2, 7.3, 7.6, 7.8, 7.12 a 7.16, 7.19 a 7.21, 7.23 e 7.26
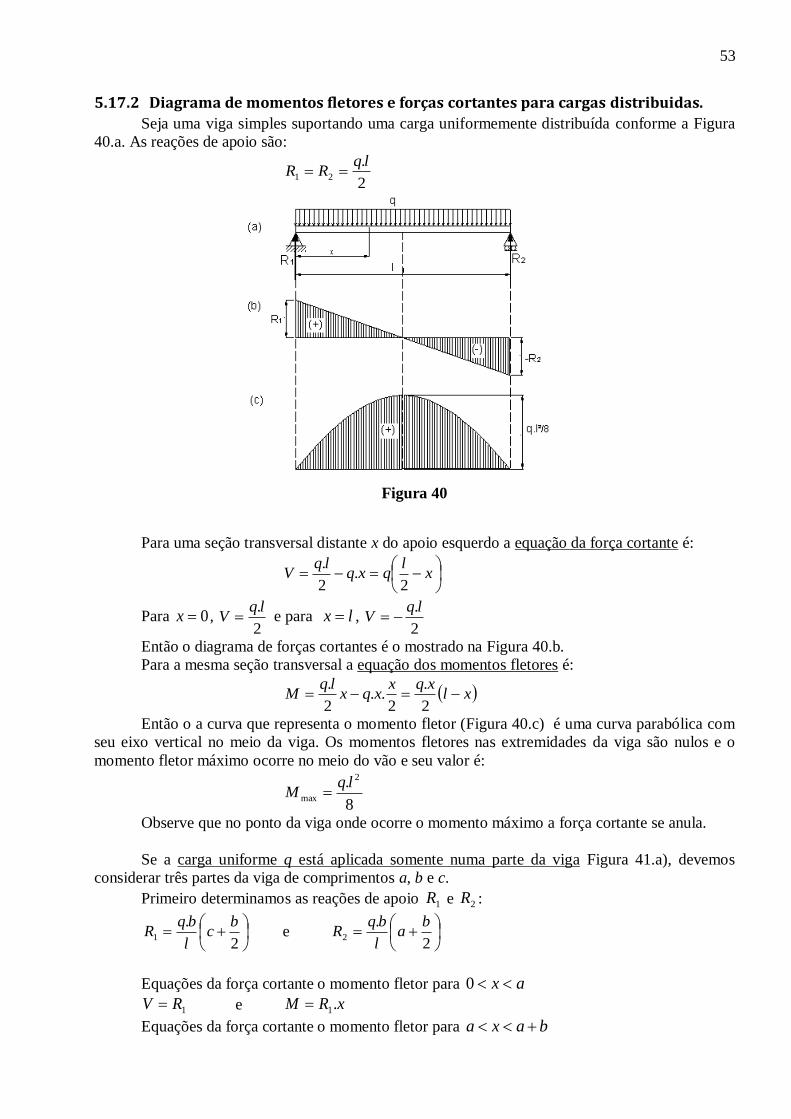
53
5.17.2 Diagrama de momentos fletores e forças cortantes para cargas distribuidas.
Seja uma viga simples suportando uma carga uniformemente distribuída conforme a Figura
40.a. As reações de apoio são:
2
.21
lqRR
Figura 40
Para uma seção transversal distante x do apoio esquerdo a equação da força cortante é:
x
lqxq
lqV
2.
2
.
Para 0x , 2
.lqV e para lx ,
2
.lqV
Então o diagrama de forças cortantes é o mostrado na Figura 40.b.
Para a mesma seção transversal a equação dos momentos fletores é:
xlxqx
xqxlq
M 2
.
2..
2
.
Então o a curva que representa o momento fletor (Figura 40.c) é uma curva parabólica com
seu eixo vertical no meio da viga. Os momentos fletores nas extremidades da viga são nulos e o
momento fletor máximo ocorre no meio do vão e seu valor é:
8
. 2
max
lqM
Observe que no ponto da viga onde ocorre o momento máximo a força cortante se anula.
Se a carga uniforme q está aplicada somente numa parte da viga Figura 41.a), devemos
considerar três partes da viga de comprimentos a, b e c.
Primeiro determinamos as reações de apoio 1R e 2R :
2
.1
bc
l
bqR e
2
.2
ba
l
bqR
Equações da força cortante o momento fletor para ax 0
1RV e xRM .1
Equações da força cortante o momento fletor para baxa
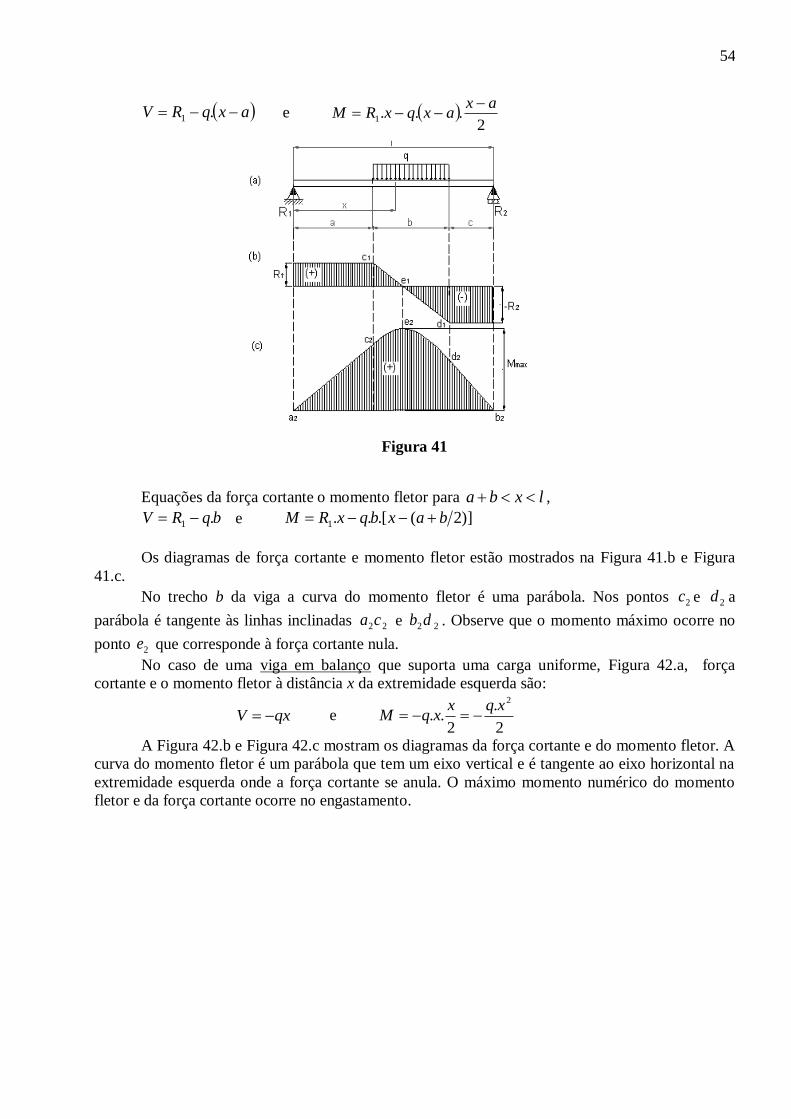
54
axqRV .1 e 2
...1
axaxqxRM
Figura 41
Equações da força cortante o momento fletor para lxba ,
bqRV .1 e )]2(.[..1 baxbqxRM
Os diagramas de força cortante e momento fletor estão mostrados na Figura 41.b e Figura
41.c.
No trecho b da viga a curva do momento fletor é uma parábola. Nos pontos 2c e 2d a
parábola é tangente às linhas inclinadas 22ca e 22db . Observe que o momento máximo ocorre no
ponto 2e que corresponde à força cortante nula.
No caso de uma viga em balanço que suporta uma carga uniforme, Figura 42.a, força
cortante e o momento fletor à distância x da extremidade esquerda são:
qxV e 2
.
2..
2xqxxqM
A Figura 42.b e Figura 42.c mostram os diagramas da força cortante e do momento fletor. A
curva do momento fletor é um parábola que tem um eixo vertical e é tangente ao eixo horizontal na
extremidade esquerda onde a força cortante se anula. O máximo momento numérico do momento
fletor e da força cortante ocorre no engastamento.
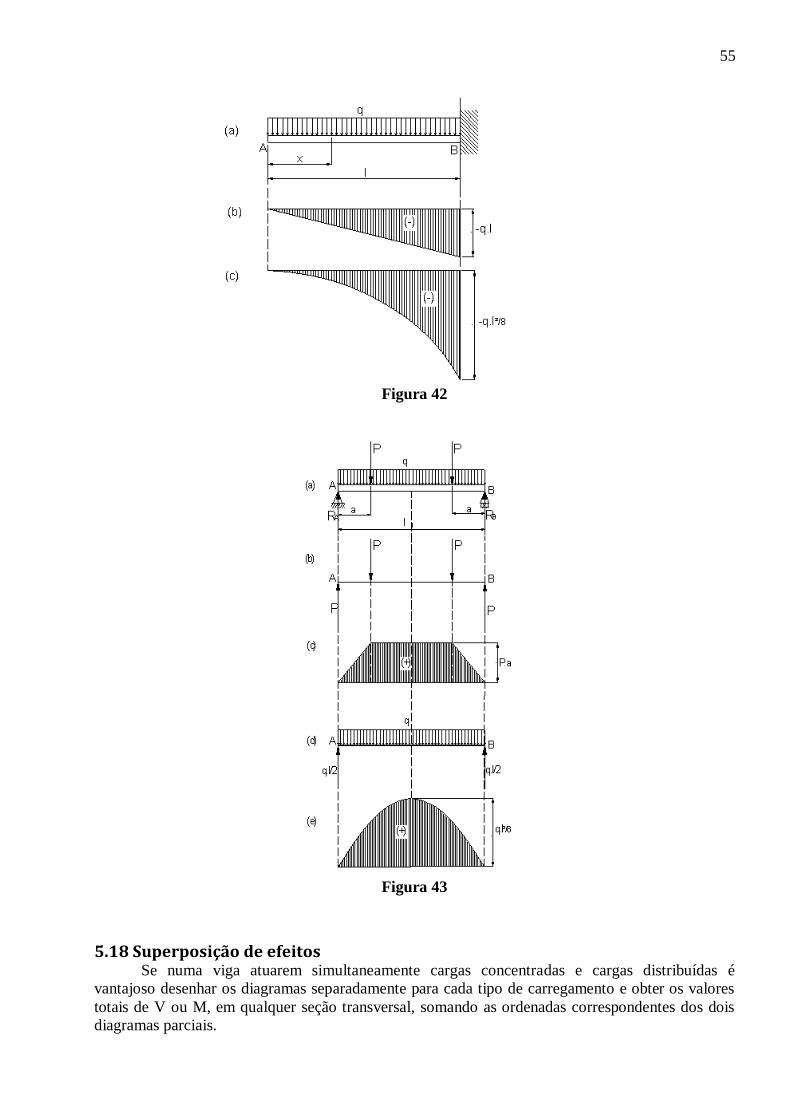
55
Figura 42
Figura 43
5.18 Superposição de efeitos Se numa viga atuarem simultaneamente cargas concentradas e cargas distribuídas é
vantajoso desenhar os diagramas separadamente para cada tipo de carregamento e obter os valores
totais de V ou M, em qualquer seção transversal, somando as ordenadas correspondentes dos dois
diagramas parciais.
56
Exemplo: Utilizando o diagrama de momentos fletores determinar o momento fletor
máximo que atua na viga mostrada na Figura 43.a.
Solução:
Vamos considerar primeiro a viga carregada somente com as cargas concentradas P (Figura
43.b) e construir o seu diagrama de momentos fletores (Figura 43.c)
Em seguida consideramos a viga carregada somente com a carga uniformemente distribuída
q (Figura 43.d) e construímos seu diagrama de momentos fletores (Figura 43.e). Pelos dois
diagramas vemos que o momento total máximo é obtido pela soma dos momentos de cada diagrama
parcial no ponto central da viga, isto é:
8.
2
max
qlaPM
5.19 Forças normais (N) Além do momento fletor e da força cortante as seções transversais de uma viga poderão
estar sujeitas, também, a forças normais que serão simbolizadas por N (ver Capítulo 2).
A força normal existirá sempre que a viga for carregada por forças que tem a direção do seu
eixo ou forças que possuem componentes nesta direção.
5.19.1 Convenção de sinais
A convenção de sinais para forças normais está mostrada na Figura 44
Figura 44
5.19.2 Equação das forças normais e diagramas
As equações das forças normais são desenvolvidas de forma similar ao que foi feito para as
forças cortantes, isto é, considerando uma seção transversal na posição x devemos lançar na
equação de N todas as forças horizontais à esquerda (ou à direita) desta seção e colocando seu sinal
conforme a convenção mostrada na Figura 44.
Da mesma forma construímos os diagramas de N colocando no eixo das abscissas a posição
x da seção transversal e no eixo das ordenadas o valor da força normal que atua nesta seção.
O exemplo numérico a seguir é mais elucidativo.
Exercício resolvido
Para a viga mostrada na Figura 45.a determinar as equações e os diagramas das forças
normais (N), forças cortantes (V) e momentos fletores (M).
Solução
a) Decompomos a carga de 9kN nas suas componentes horizontal e vertical.
kNF x 4,735cos.9
kNsenF y 2,535.9
b) Construímos o diagrama de corpo-livre conforme a Figura 45.b
a) Calculamos as reações de apoio
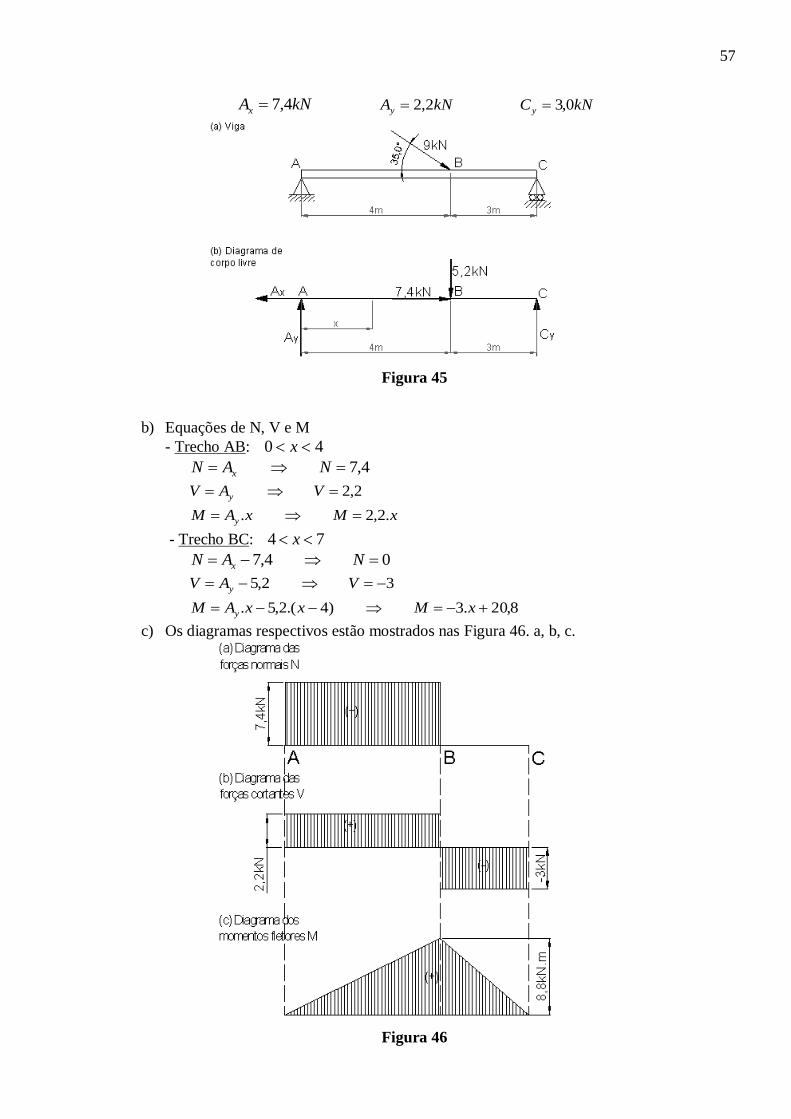
57
kNAx 4,7 kNAy 2,2 kNCy 0,3
Figura 45
b) Equações de N, V e M
- Trecho AB: 40 x
4,7 NAN x
2,2 VAV y
xMxAM y .2,2.
- Trecho BC: 74 x
04,7 NAN x
32,5 VAV y
8,20.3)4.(2,5. xMxxAM y
c) Os diagramas respectivos estão mostrados nas Figura 46. a, b, c.
Figura 46
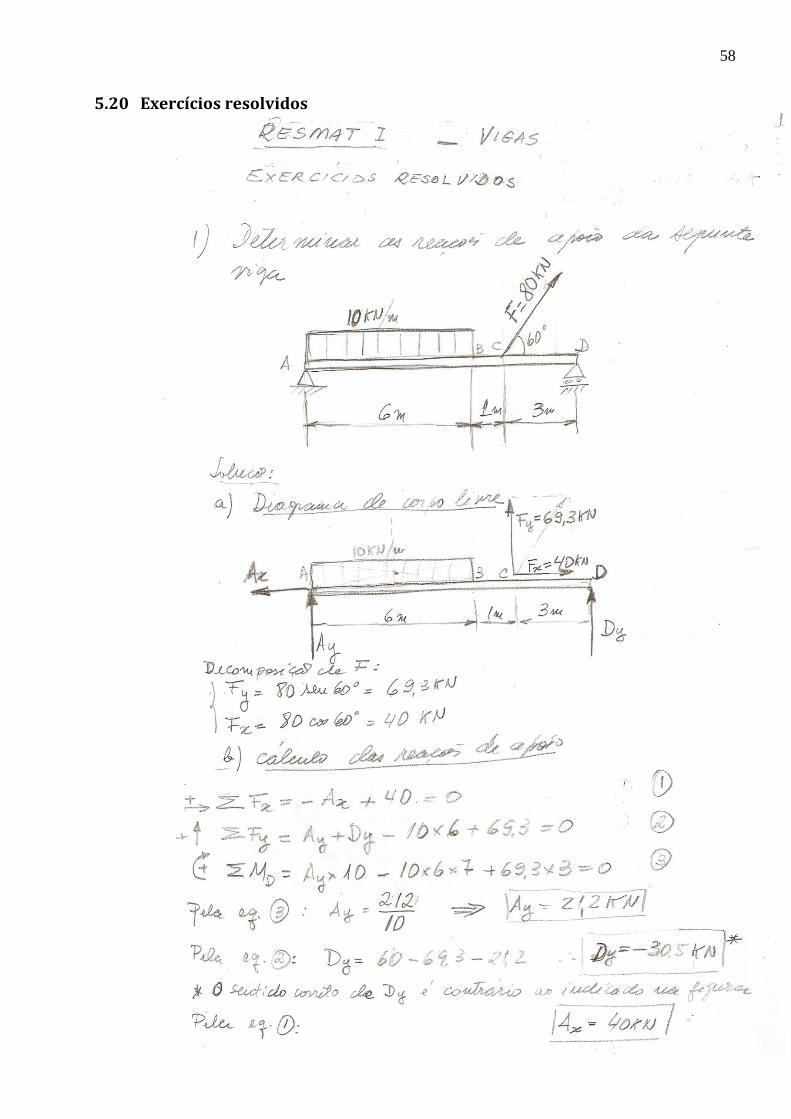
58
5.20 Exercícios resolvidos
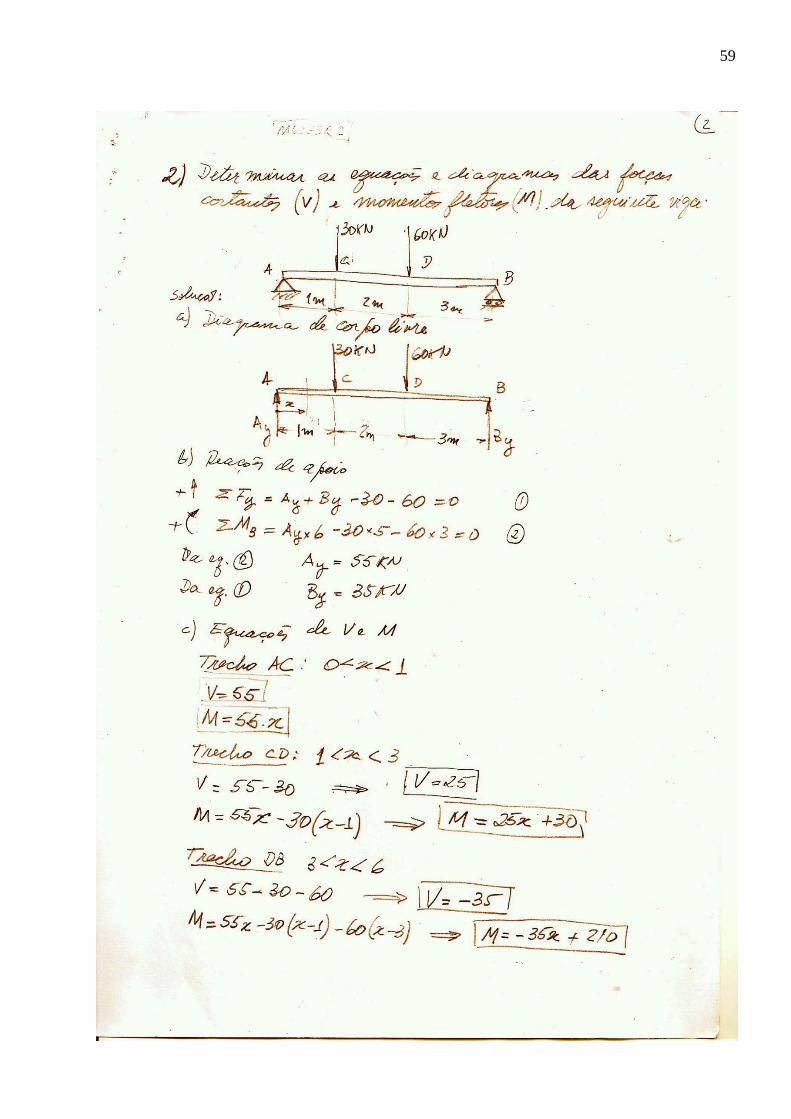
59
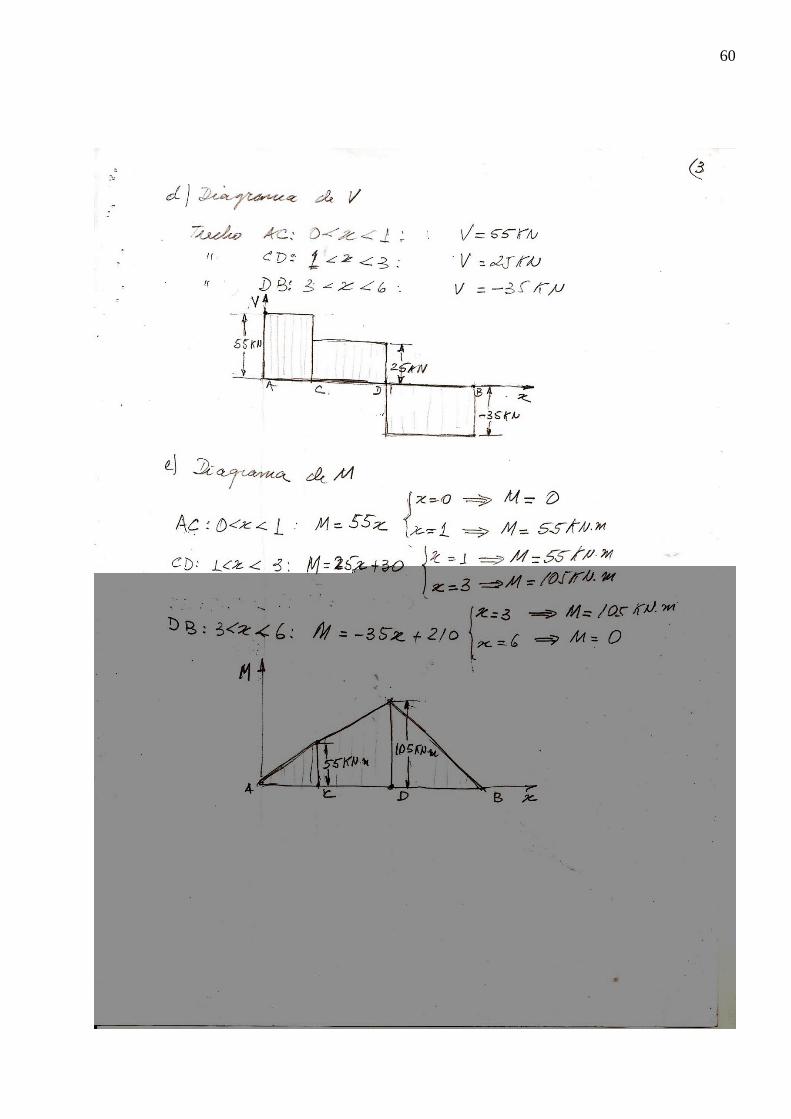
60
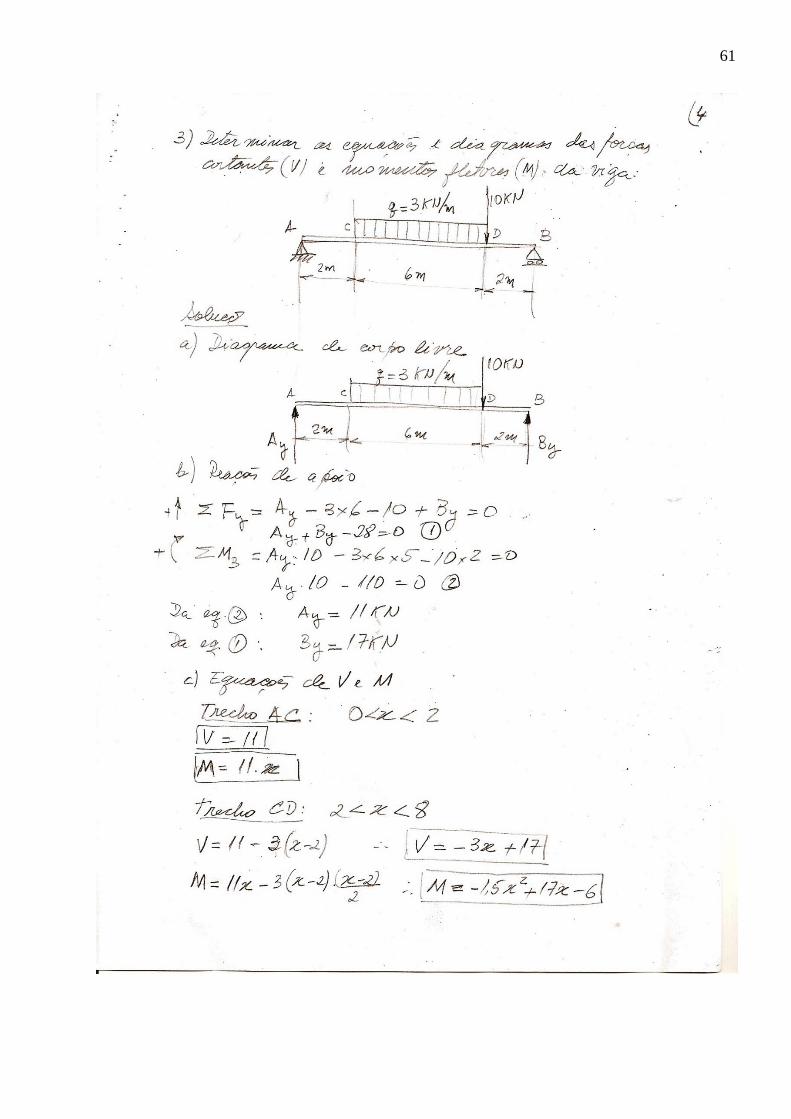
61
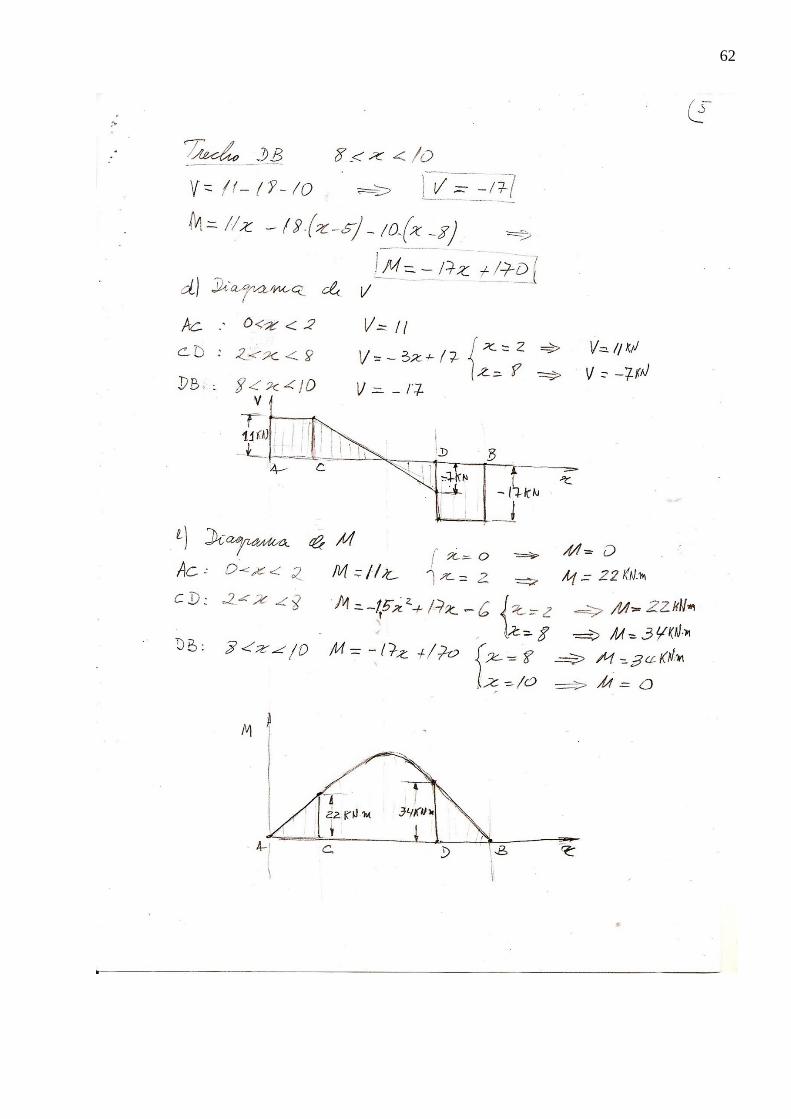
62

63
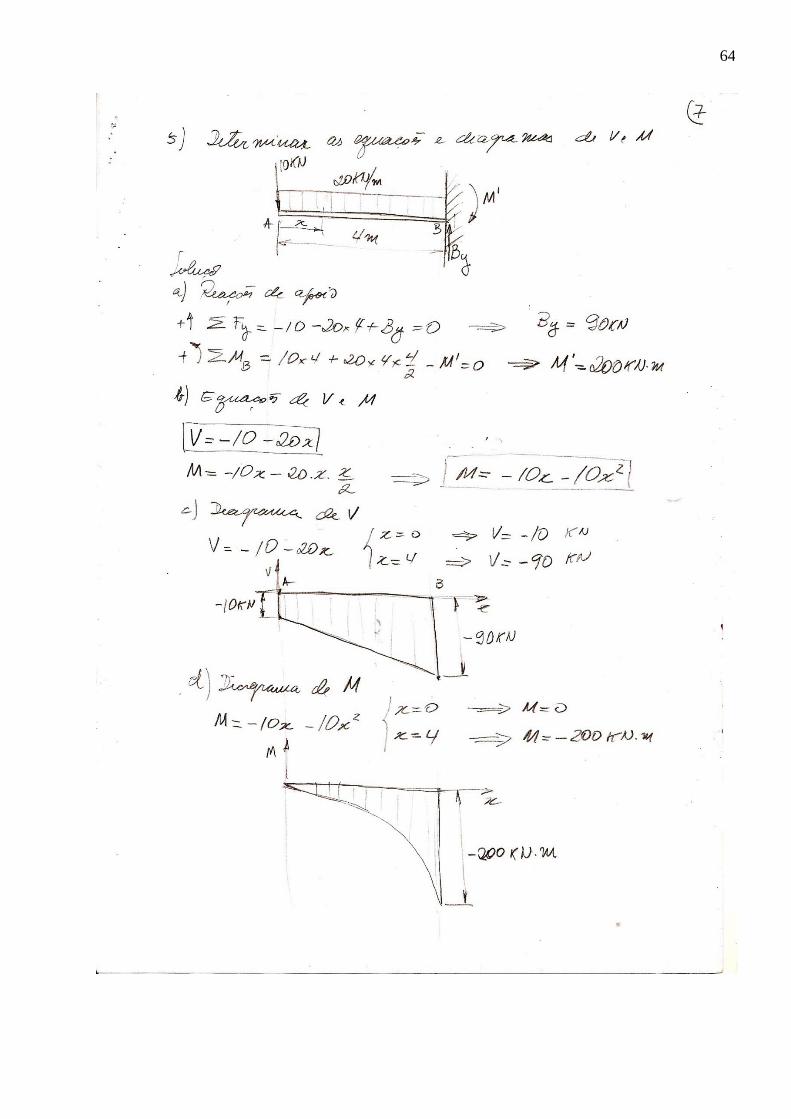
64
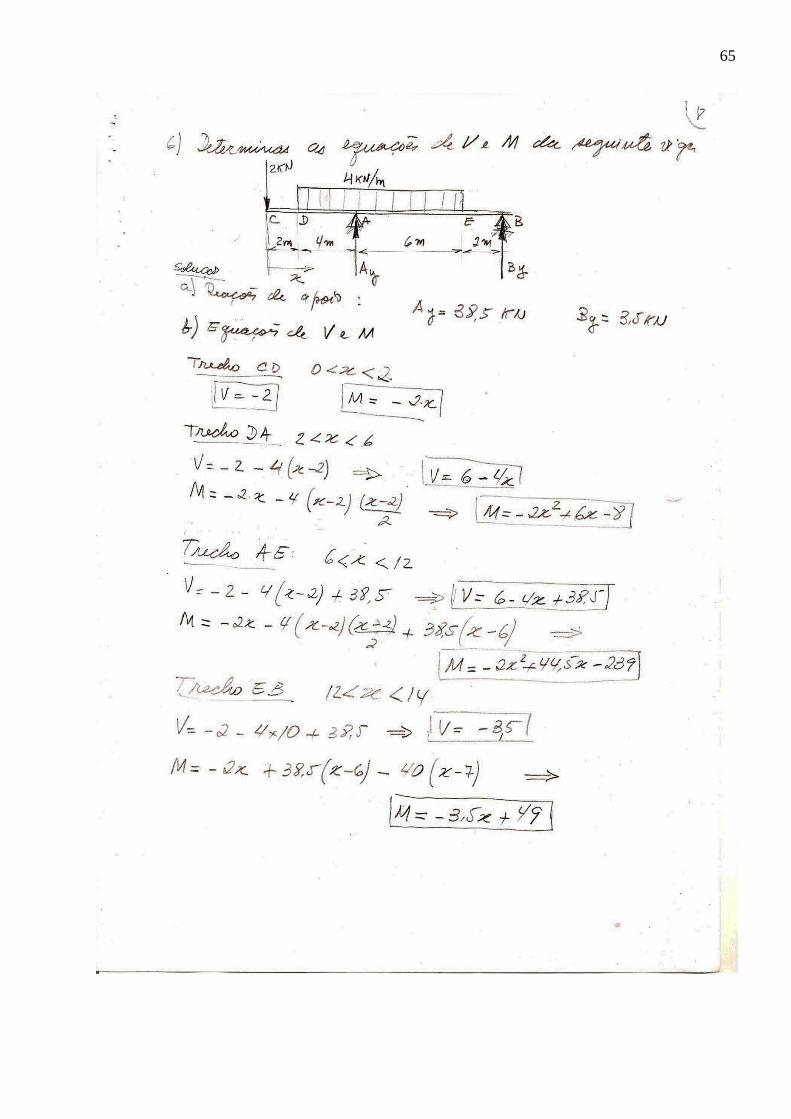
65
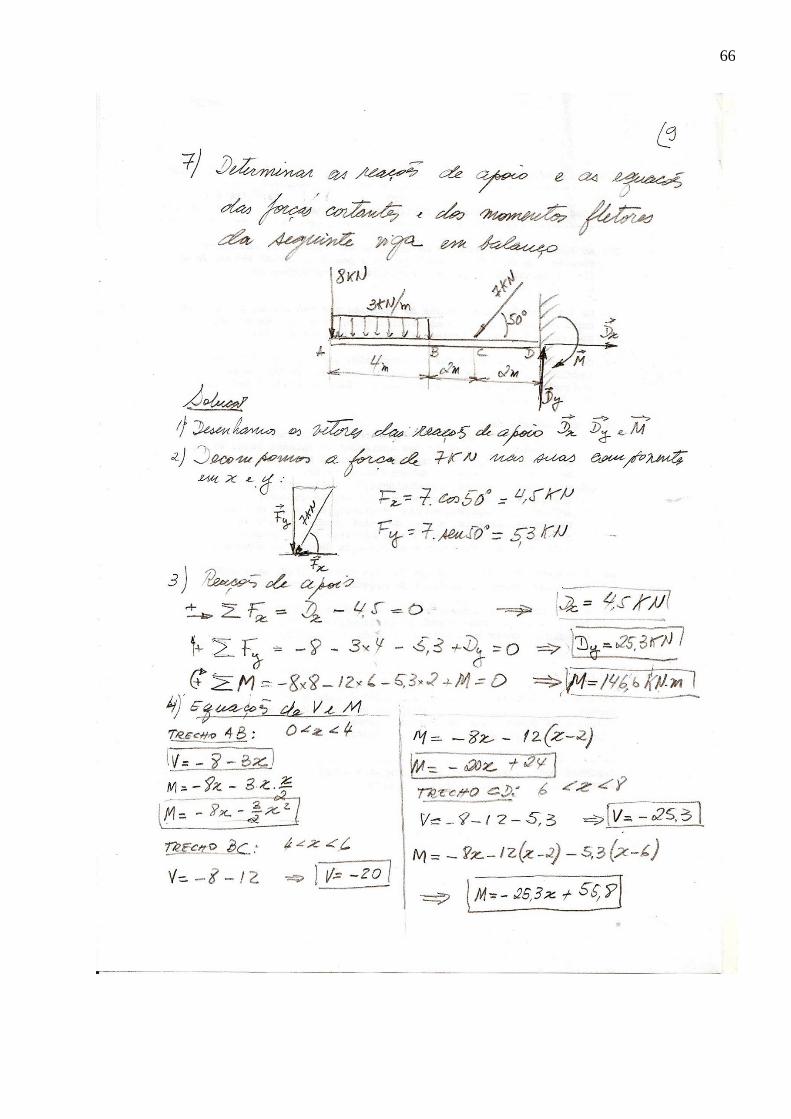
66
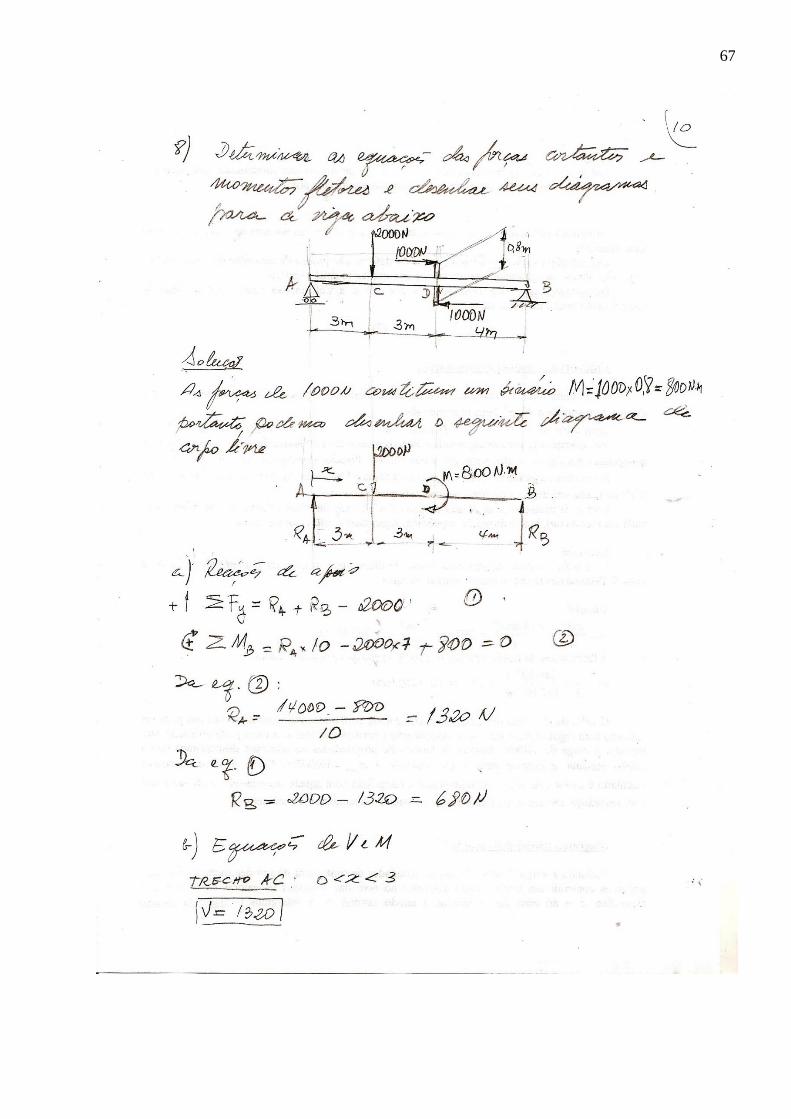
67
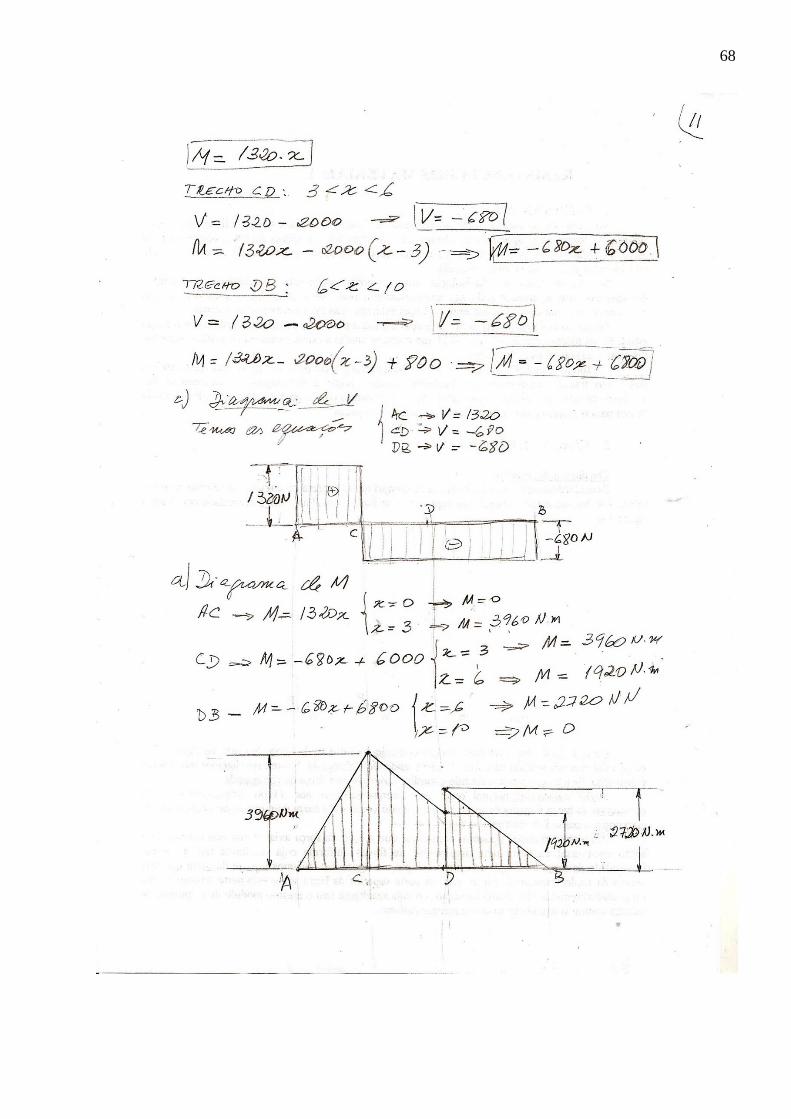
68
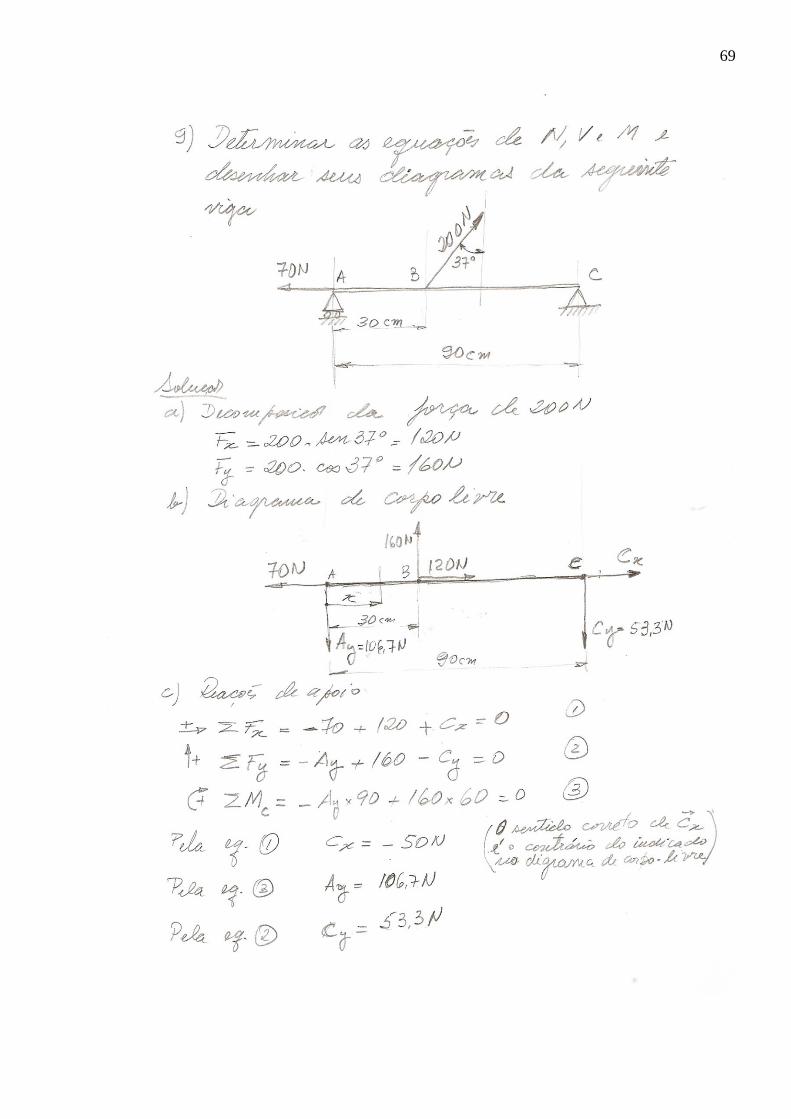
69
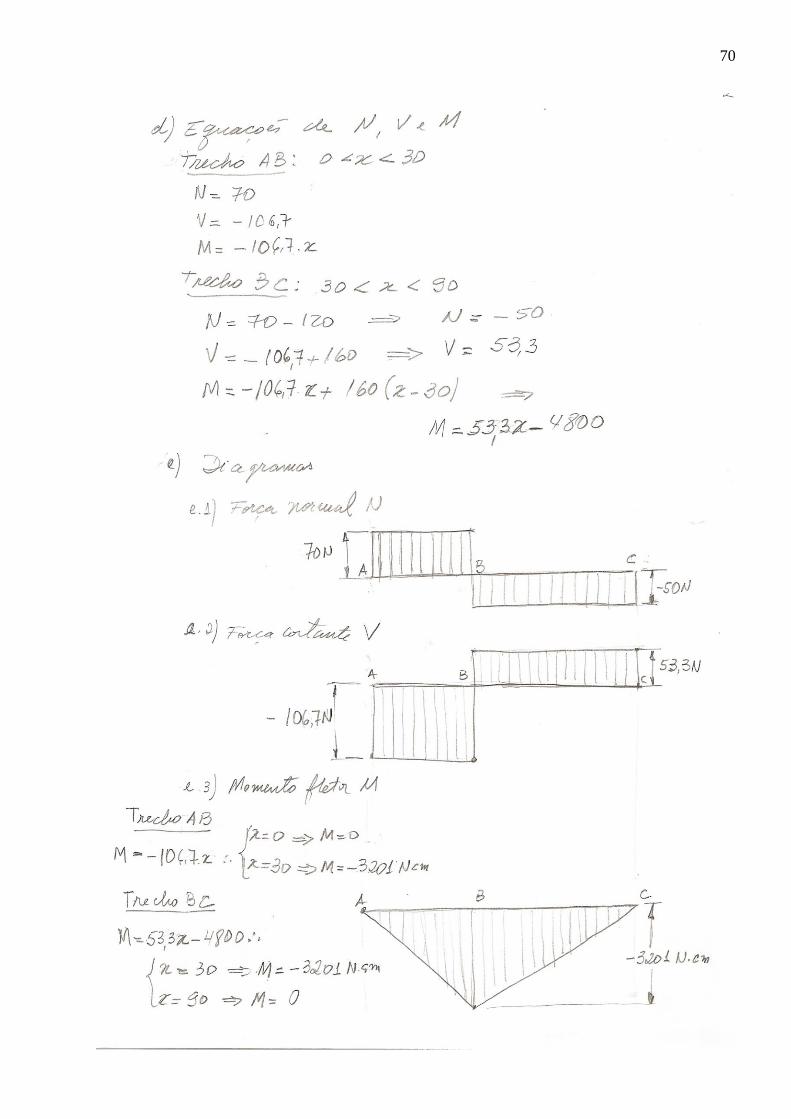
70
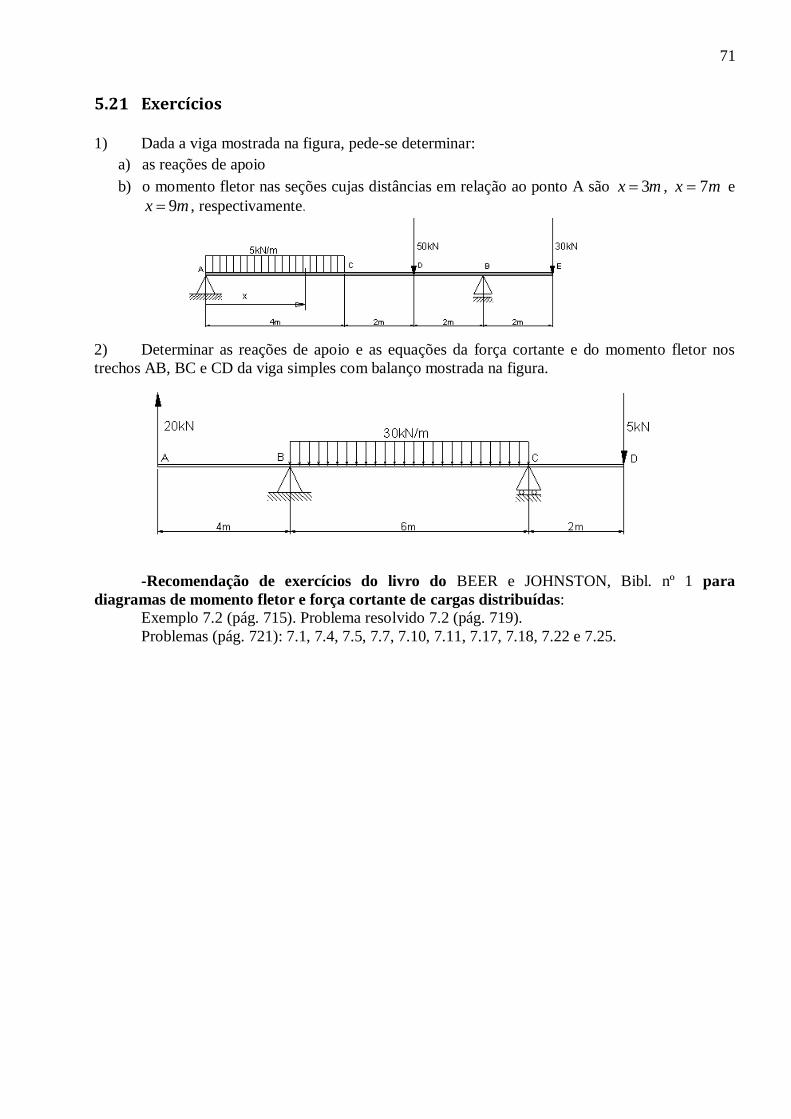
71
5.21 Exercícios
1) Dada a viga mostrada na figura, pede-se determinar:
a) as reações de apoio
b) o momento fletor nas seções cujas distâncias em relação ao ponto A são mx 3 , mx 7 e
mx 9 , respectivamente.
2) Determinar as reações de apoio e as equações da força cortante e do momento fletor nos
trechos AB, BC e CD da viga simples com balanço mostrada na figura.
-Recomendação de exercícios do livro do BEER e JOHNSTON, Bibl. nº 1 para
diagramas de momento fletor e força cortante de cargas distribuídas:
Exemplo 7.2 (pág. 715). Problema resolvido 7.2 (pág. 719).
Problemas (pág. 721): 7.1, 7.4, 7.5, 7.7, 7.10, 7.11, 7.17, 7.18, 7.22 e 7.25.
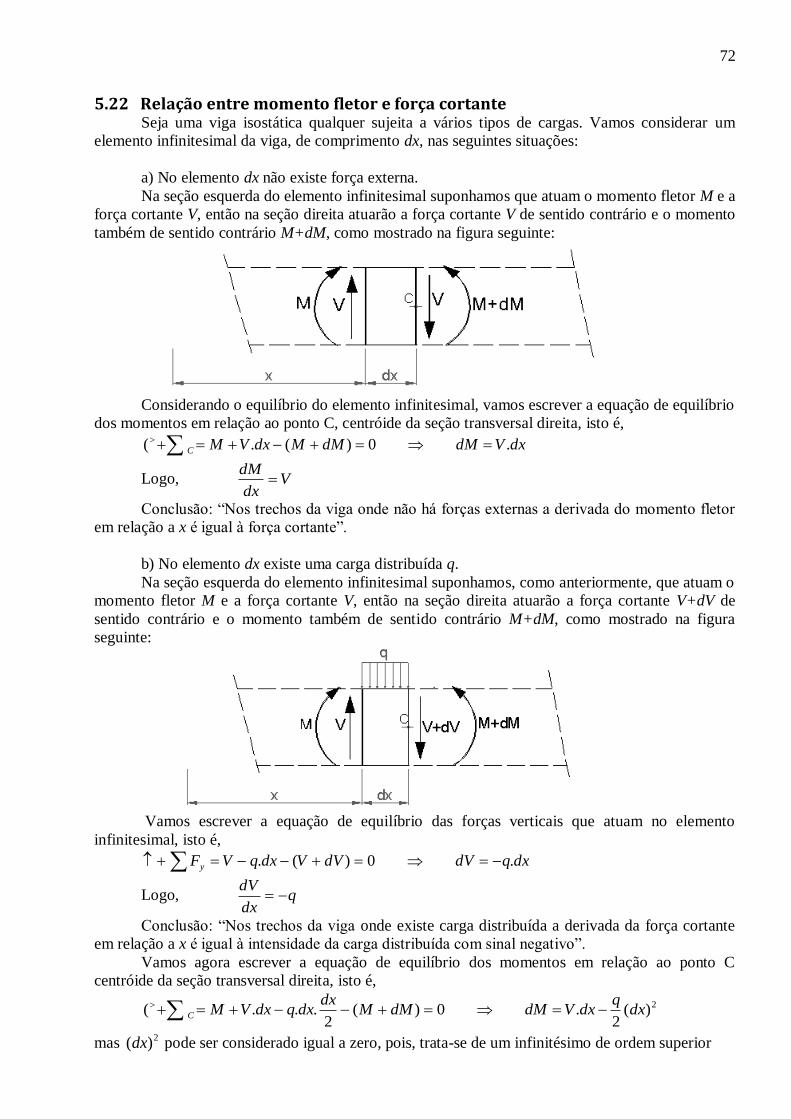
72
5.22 Relação entre momento fletor e força cortante Seja uma viga isostática qualquer sujeita a vários tipos de cargas. Vamos considerar um
elemento infinitesimal da viga, de comprimento dx, nas seguintes situações:
a) No elemento dx não existe força externa.
Na seção esquerda do elemento infinitesimal suponhamos que atuam o momento fletor M e a
força cortante V, então na seção direita atuarão a força cortante V de sentido contrário e o momento
também de sentido contrário M+dM, como mostrado na figura seguinte:
Considerando o equilíbrio do elemento infinitesimal, vamos escrever a equação de equilíbrio
dos momentos em relação ao ponto C, centróide da seção transversal direita, isto é,
dxVdMdMMdxVMC .0)(.(
Logo, Vdx
dM
Conclusão: “Nos trechos da viga onde não há forças externas a derivada do momento fletor
em relação a x é igual à força cortante”.
b) No elemento dx existe uma carga distribuída q.
Na seção esquerda do elemento infinitesimal suponhamos, como anteriormente, que atuam o
momento fletor M e a força cortante V, então na seção direita atuarão a força cortante V+dV de
sentido contrário e o momento também de sentido contrário M+dM, como mostrado na figura
seguinte:
Vamos escrever a equação de equilíbrio das forças verticais que atuam no elemento
infinitesimal, isto é,
dxqdVdVVdxqVFy .0)(.
Logo, qdx
dV
Conclusão: “Nos trechos da viga onde existe carga distribuída a derivada da força cortante
em relação a x é igual à intensidade da carga distribuída com sinal negativo”.
Vamos agora escrever a equação de equilíbrio dos momentos em relação ao ponto C
centróide da seção transversal direita, isto é,
2)(2
.0)(2
...( dxq
dxVdMdMMdx
dxqdxVMC
mas 2)(dx pode ser considerado igual a zero, pois, trata-se de um infinitésimo de ordem superior
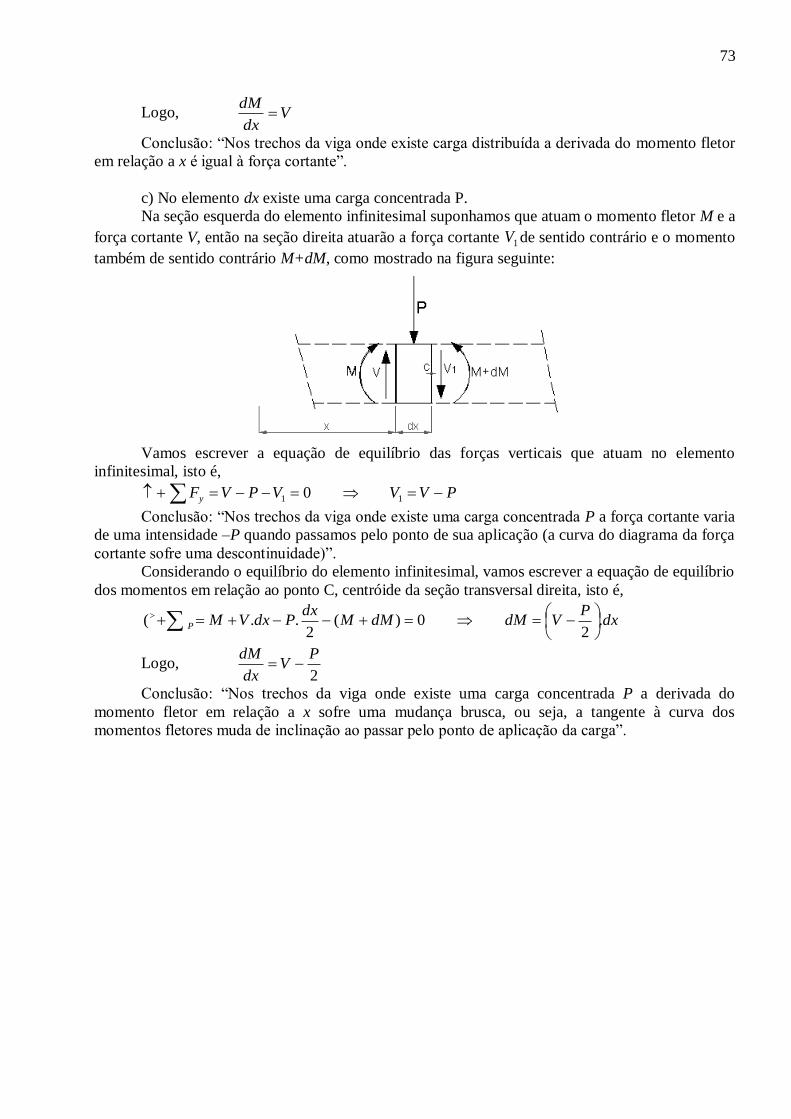
73
Logo, Vdx
dM
Conclusão: “Nos trechos da viga onde existe carga distribuída a derivada do momento fletor
em relação a x é igual à força cortante”.
c) No elemento dx existe uma carga concentrada P.
Na seção esquerda do elemento infinitesimal suponhamos que atuam o momento fletor M e a
força cortante V, então na seção direita atuarão a força cortante 1V de sentido contrário e o momento
também de sentido contrário M+dM, como mostrado na figura seguinte:
Vamos escrever a equação de equilíbrio das forças verticais que atuam no elemento
infinitesimal, isto é,
PVVVPVFy 11 0
Conclusão: “Nos trechos da viga onde existe uma carga concentrada P a força cortante varia
de uma intensidade –P quando passamos pelo ponto de sua aplicação (a curva do diagrama da força
cortante sofre uma descontinuidade)”.
Considerando o equilíbrio do elemento infinitesimal, vamos escrever a equação de equilíbrio
dos momentos em relação ao ponto C, centróide da seção transversal direita, isto é,
dxP
VdMdMMdx
PdxVMP .2
0)(2
..(
Logo, 2
PV
dx
dM
Conclusão: “Nos trechos da viga onde existe uma carga concentrada P a derivada do
momento fletor em relação a x sofre uma mudança brusca, ou seja, a tangente à curva dos
momentos fletores muda de inclinação ao passar pelo ponto de aplicação da carga”.
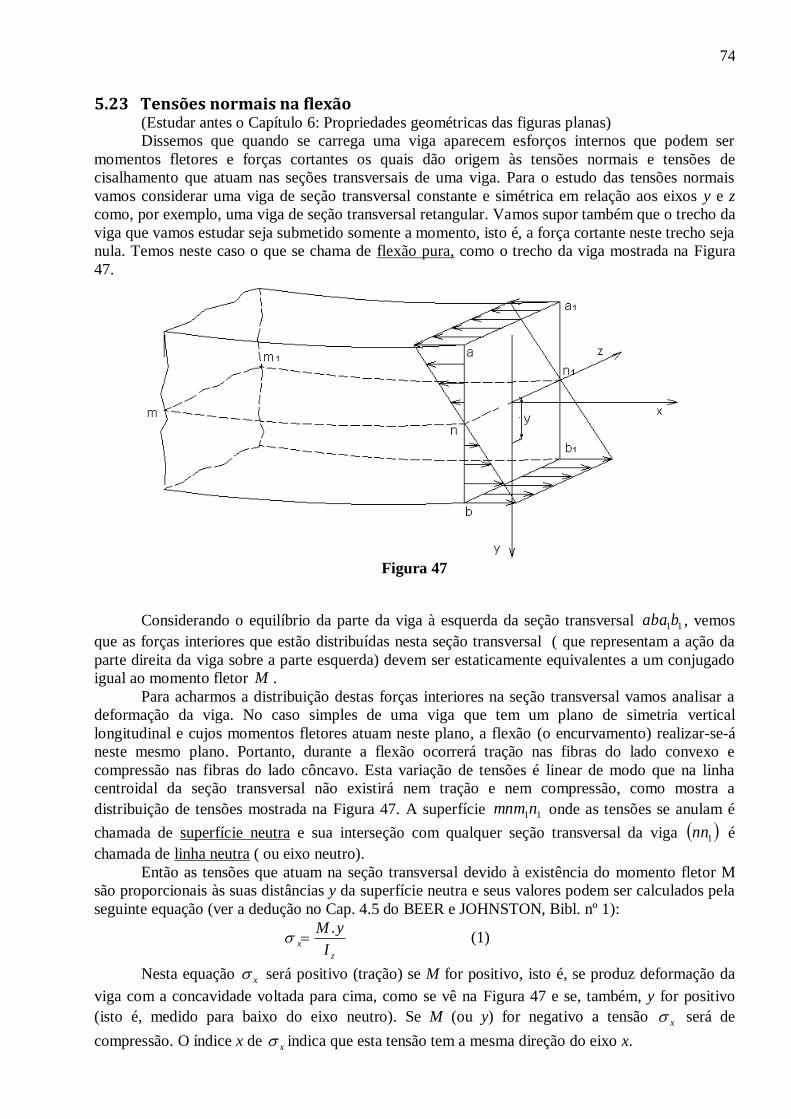
74
5.23 Tensões normais na flexão (Estudar antes o Capítulo 6: Propriedades geométricas das figuras planas)
Dissemos que quando se carrega uma viga aparecem esforços internos que podem ser
momentos fletores e forças cortantes os quais dão origem às tensões normais e tensões de
cisalhamento que atuam nas seções transversais de uma viga. Para o estudo das tensões normais
vamos considerar uma viga de seção transversal constante e simétrica em relação aos eixos y e z
como, por exemplo, uma viga de seção transversal retangular. Vamos supor também que o trecho da
viga que vamos estudar seja submetido somente a momento, isto é, a força cortante neste trecho seja
nula. Temos neste caso o que se chama de flexão pura, como o trecho da viga mostrada na Figura
47.
Figura 47
Considerando o equilíbrio da parte da viga à esquerda da seção transversal 11baba , vemos
que as forças interiores que estão distribuídas nesta seção transversal ( que representam a ação da
parte direita da viga sobre a parte esquerda) devem ser estaticamente equivalentes a um conjugado
igual ao momento fletor M .
Para acharmos a distribuição destas forças interiores na seção transversal vamos analisar a
deformação da viga. No caso simples de uma viga que tem um plano de simetria vertical
longitudinal e cujos momentos fletores atuam neste plano, a flexão (o encurvamento) realizar-se-á
neste mesmo plano. Portanto, durante a flexão ocorrerá tração nas fibras do lado convexo e
compressão nas fibras do lado côncavo. Esta variação de tensões é linear de modo que na linha
centroidal da seção transversal não existirá nem tração e nem compressão, como mostra a
distribuição de tensões mostrada na Figura 47. A superfície 11nmnm onde as tensões se anulam é
chamada de superfície neutra e sua interseção com qualquer seção transversal da viga 1nn é
chamada de linha neutra ( ou eixo neutro).
Então as tensões que atuam na seção transversal devido à existência do momento fletor M
são proporcionais às suas distâncias y da superfície neutra e seus valores podem ser calculados pela
seguinte equação (ver a dedução no Cap. 4.5 do BEER e JOHNSTON, Bibl. nº 1):
z
xI
yM . (1)
Nesta equação x será positivo (tração) se M for positivo, isto é, se produz deformação da
viga com a concavidade voltada para cima, como se vê na Figura 47 e se, também, y for positivo
(isto é, medido para baixo do eixo neutro). Se M (ou y) for negativo a tensão x será de
compressão. O índice x de x indica que esta tensão tem a mesma direção do eixo x.
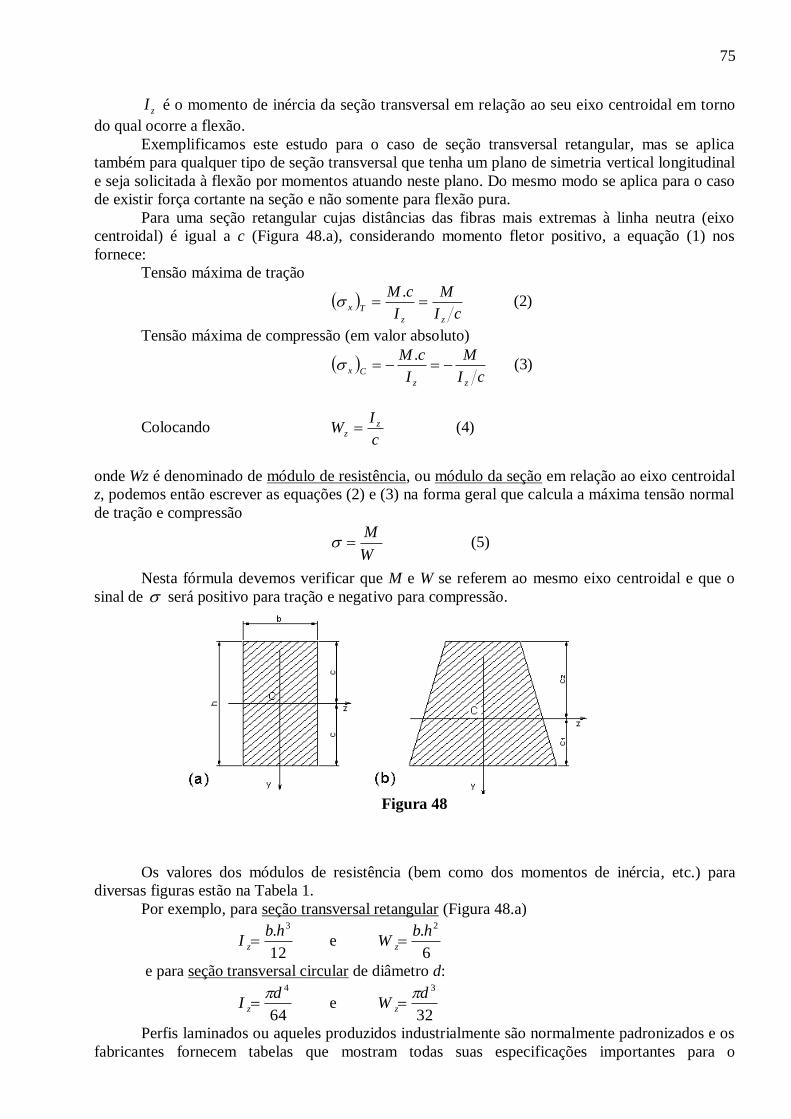
75
zI é o momento de inércia da seção transversal em relação ao seu eixo centroidal em torno
do qual ocorre a flexão.
Exemplificamos este estudo para o caso de seção transversal retangular, mas se aplica
também para qualquer tipo de seção transversal que tenha um plano de simetria vertical longitudinal
e seja solicitada à flexão por momentos atuando neste plano. Do mesmo modo se aplica para o caso
de existir força cortante na seção e não somente para flexão pura.
Para uma seção retangular cujas distâncias das fibras mais extremas à linha neutra (eixo
centroidal) é igual a c (Figura 48.a), considerando momento fletor positivo, a equação (1) nos
fornece:
Tensão máxima de tração
cI
M
I
cM
zz
Tx .
(2)
Tensão máxima de compressão (em valor absoluto)
cI
M
I
cM
zz
Cx .
(3)
Colocando c
IW z
z (4)
onde Wz é denominado de módulo de resistência, ou módulo da seção em relação ao eixo centroidal
z, podemos então escrever as equações (2) e (3) na forma geral que calcula a máxima tensão normal
de tração e compressão
W
M (5)
Nesta fórmula devemos verificar que M e W se referem ao mesmo eixo centroidal e que o
sinal de será positivo para tração e negativo para compressão.
Figura 48
Os valores dos módulos de resistência (bem como dos momentos de inércia, etc.) para
diversas figuras estão na Tabela 1.
Por exemplo, para seção transversal retangular (Figura 48.a)
12
. 3hbI z e
6
. 2hbW z
e para seção transversal circular de diâmetro d:
64
4dI z
e
32
3dW z
Perfis laminados ou aqueles produzidos industrialmente são normalmente padronizados e os
fabricantes fornecem tabelas que mostram todas suas especificações importantes para o
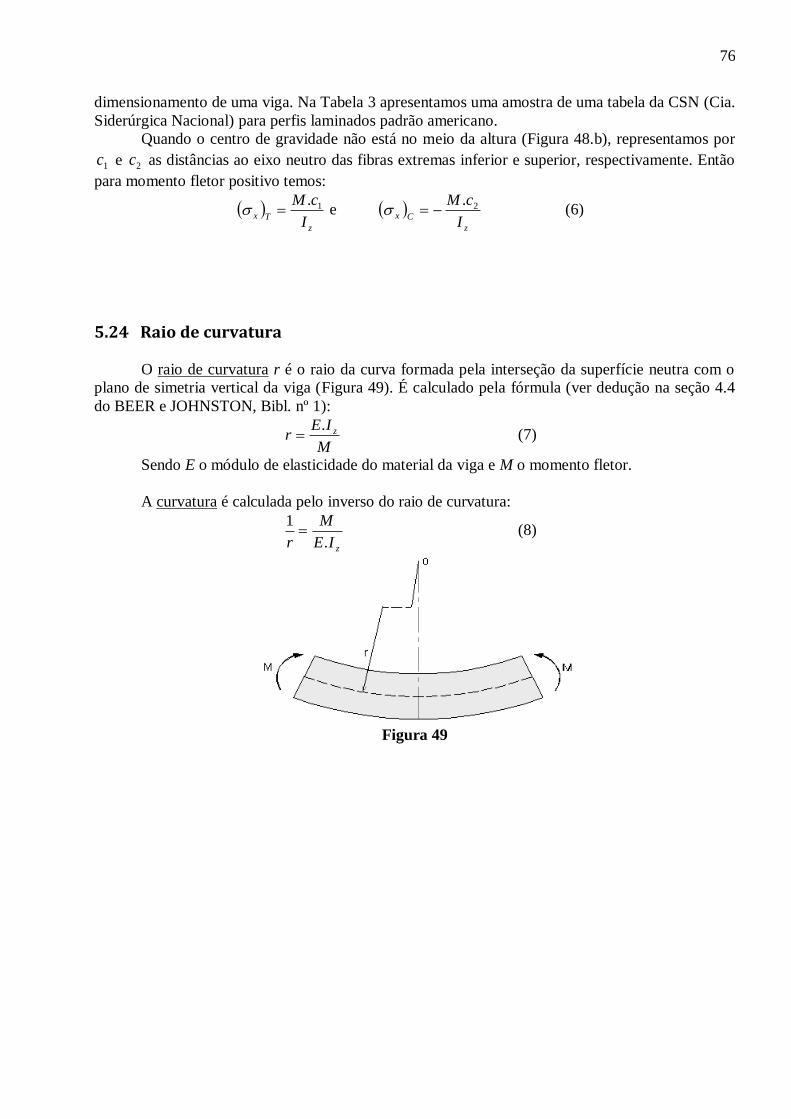
76
dimensionamento de uma viga. Na Tabela 3 apresentamos uma amostra de uma tabela da CSN (Cia.
Siderúrgica Nacional) para perfis laminados padrão americano.
Quando o centro de gravidade não está no meio da altura (Figura 48.b), representamos por
1c e 2c as distâncias ao eixo neutro das fibras extremas inferior e superior, respectivamente. Então
para momento fletor positivo temos:
z
TxI
cM 1. e
z
CxI
cM 2. (6)
5.24 Raio de curvatura
O raio de curvatura r é o raio da curva formada pela interseção da superfície neutra com o
plano de simetria vertical da viga (Figura 49). É calculado pela fórmula (ver dedução na seção 4.4
do BEER e JOHNSTON, Bibl. nº 1):
M
IEr z. (7)
Sendo E o módulo de elasticidade do material da viga e M o momento fletor.
A curvatura é calculada pelo inverso do raio de curvatura:
zIE
M
r .
1 (8)
Figura 49
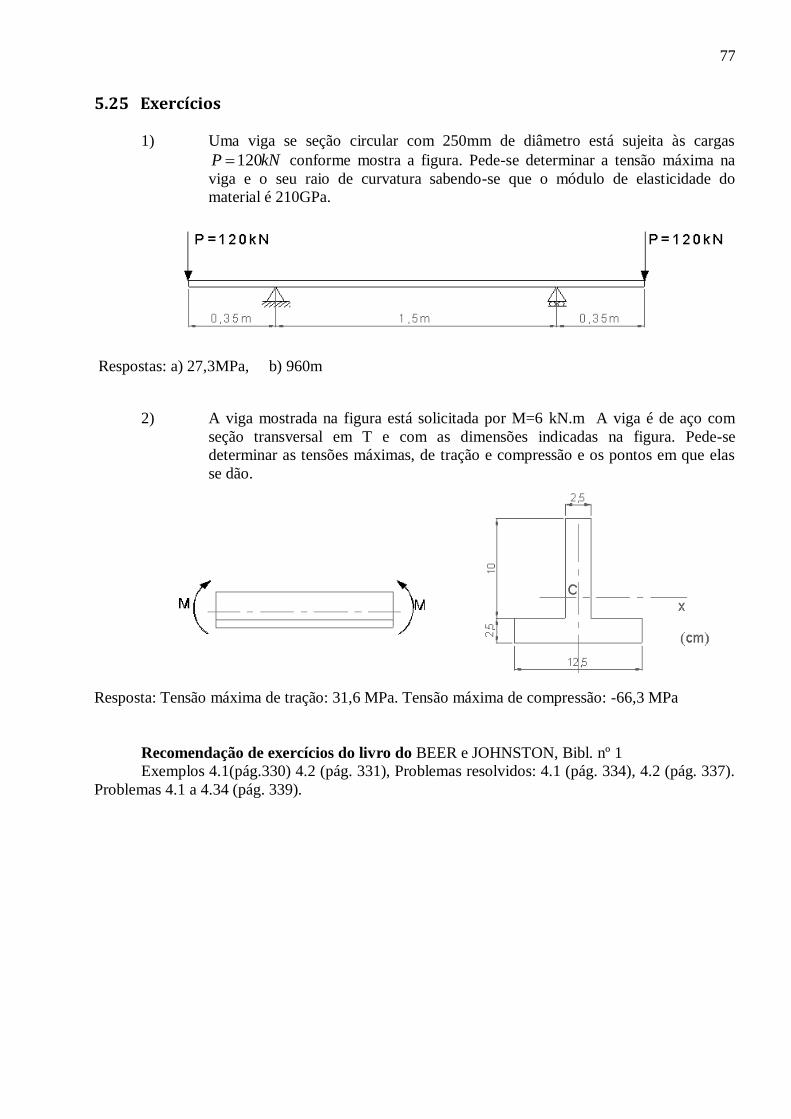
77
5.25 Exercícios
1) Uma viga se seção circular com 250mm de diâmetro está sujeita às cargas
kNP 120 conforme mostra a figura. Pede-se determinar a tensão máxima na
viga e o seu raio de curvatura sabendo-se que o módulo de elasticidade do
material é 210GPa.
Respostas: a) 27,3MPa, b) 960m
2) A viga mostrada na figura está solicitada por M=6 kN.m A viga é de aço com
seção transversal em T e com as dimensões indicadas na figura. Pede-se
determinar as tensões máximas, de tração e compressão e os pontos em que elas
se dão.
Resposta: Tensão máxima de tração: 31,6 MPa. Tensão máxima de compressão: -66,3 MPa
Recomendação de exercícios do livro do BEER e JOHNSTON, Bibl. nº 1
Exemplos 4.1(pág.330) 4.2 (pág. 331), Problemas resolvidos: 4.1 (pág. 334), 4.2 (pág. 337).
Problemas 4.1 a 4.34 (pág. 339).
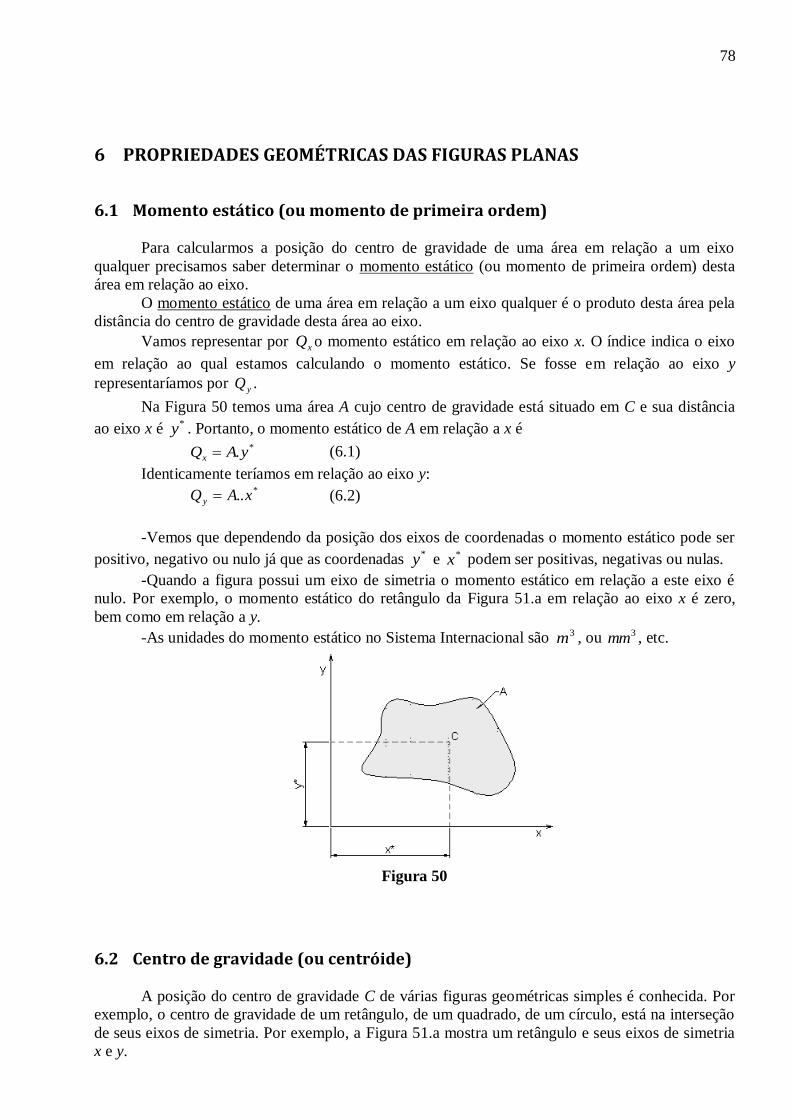
78
6 PROPRIEDADES GEOMÉTRICAS DAS FIGURAS PLANAS
6.1 Momento estático (ou momento de primeira ordem)
Para calcularmos a posição do centro de gravidade de uma área em relação a um eixo
qualquer precisamos saber determinar o momento estático (ou momento de primeira ordem) desta
área em relação ao eixo.
O momento estático de uma área em relação a um eixo qualquer é o produto desta área pela
distância do centro de gravidade desta área ao eixo.
Vamos representar por o momento estático em relação ao eixo x. O índice indica o eixo
em relação ao qual estamos calculando o momento estático. Se fosse em relação ao eixo y
representaríamos por .
Na Figura 50 temos uma área A cujo centro de gravidade está situado em C e sua distância
ao eixo x é *y . Portanto, o momento estático de A em relação a x é
*.yAQx (6.1)
Identicamente teríamos em relação ao eixo y:
*..xAQ y (6.2)
-Vemos que dependendo da posição dos eixos de coordenadas o momento estático pode ser
positivo, negativo ou nulo já que as coordenadas *y e *x podem ser positivas, negativas ou nulas.
-Quando a figura possui um eixo de simetria o momento estático em relação a este eixo é
nulo. Por exemplo, o momento estático do retângulo da Figura 51.a em relação ao eixo x é zero,
bem como em relação a y.
-As unidades do momento estático no Sistema Internacional são 3m , ou 3mm , etc.
Figura 50
6.2 Centro de gravidade (ou centróide)
A posição do centro de gravidade C de várias figuras geométricas simples é conhecida. Por
exemplo, o centro de gravidade de um retângulo, de um quadrado, de um círculo, está na interseção
de seus eixos de simetria. Por exemplo, a Figura 51.a mostra um retângulo e seus eixos de simetria
x e y.
xQ
yQ
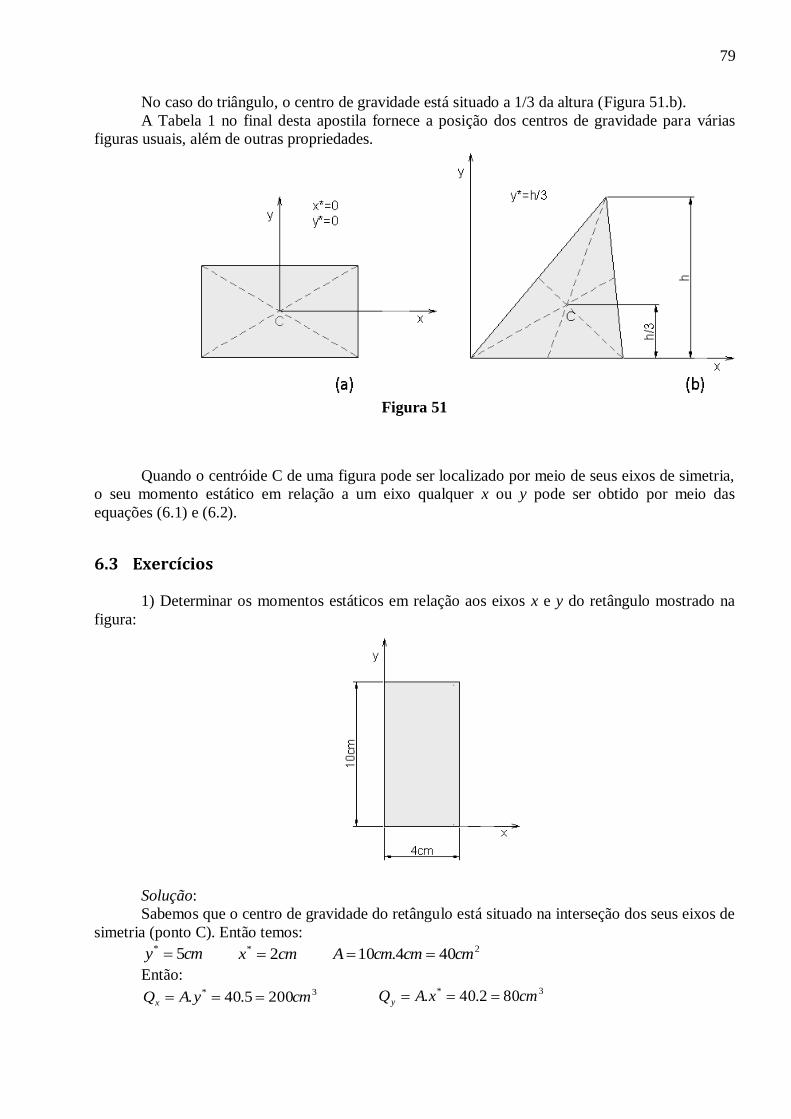
79
No caso do triângulo, o centro de gravidade está situado a 1/3 da altura (Figura 51.b).
A Tabela 1 no final desta apostila fornece a posição dos centros de gravidade para várias
figuras usuais, além de outras propriedades.
Figura 51
Quando o centróide C de uma figura pode ser localizado por meio de seus eixos de simetria,
o seu momento estático em relação a um eixo qualquer x ou y pode ser obtido por meio das
equações (6.1) e (6.2).
6.3 Exercícios
1) Determinar os momentos estáticos em relação aos eixos x e y do retângulo mostrado na
figura:
Solução:
Sabemos que o centro de gravidade do retângulo está situado na interseção dos seus eixos de
simetria (ponto C). Então temos:
cmy 5* cmx 2* 2404.10 cmcmcmA
Então:
3* 2005.40. cmyAQx 3* 802.40. cmxAQy

80
2) Determinar os momentos estáticos em relação aos eixos x e y do círculo mostrado na
figura, sabendo-se que seu diâmetro é 0,6m.
Respostas:
3085,0 mQy e 0xQ
6.4 Determinação do centro de gravidade (centróide) de uma área
No caso de figuras mais irregulares cuja posição do centro de gravidade não conhecemos,
para calculá-la, temos de usar as equações (6.1) e (6.2). Para determinarmos a posição do centro de
gravidade basta dividirmos o momento estático pela área, isto é,
A
Qy x* (6.3)
A
Qx
y* (6.4)
Mas para aplicar estas equações temos que determinar sua área e o momento estático da
figura.
A área é calculada pela soma das áreas das figuras simples que a compõe.
O momento estático de uma figura composta por um conjunto de figuras geométricas
simples é calculado pela soma dos momentos estáticos de cada figura simples (tudo em relação ao
mesmo eixo).
Seja, por exemplo, determinar o momento estático e a posição do centro de gravidade de
uma área conforme mostrada na Figura 52.a.
. Para calcular o momento estático e o centro de gravidade C da área A, devemos primeiro
dividi-la em figuras simples como os dois retângulos de áreas A1 e A2 e o triângulo de área A3.
(Figura 52.b)
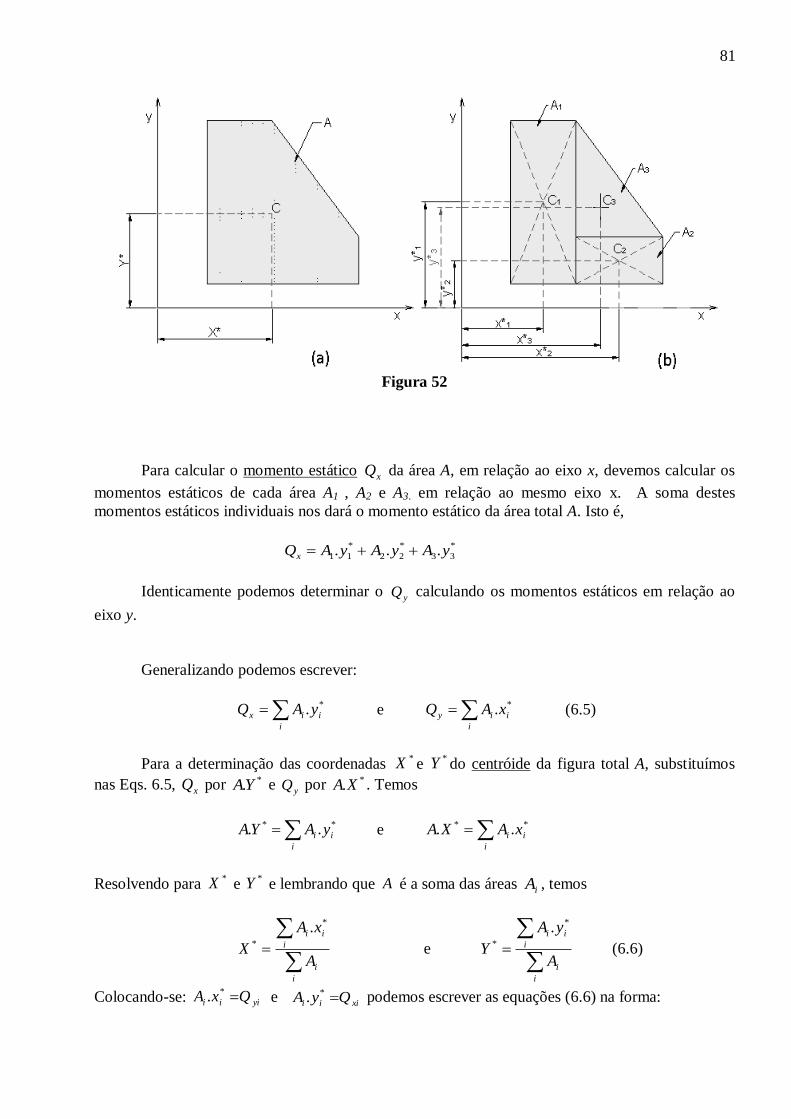
81
Figura 52
Para calcular o momento estático xQ da área A, em relação ao eixo x, devemos calcular os
momentos estáticos de cada área A1 , A2 e A3. em relação ao mesmo eixo x. A soma destes
momentos estáticos individuais nos dará o momento estático da área total A. Isto é,
*
33
*
22
*
11 ... yAyAyAQx
Identicamente podemos determinar o yQ calculando os momentos estáticos em relação ao
eixo y.
Generalizando podemos escrever:
i
iix yAQ *. e i
iiy xAQ *. (6.5)
Para a determinação das coordenadas *X e
*Y do centróide da figura total A, substituímos
nas Eqs. 6.5, xQ por *.YA e yQ por *.XA . Temos
i
ii yAYA ** .. e i
ii xAXA ** ..
Resolvendo para *X e
*Y e lembrando que A é a soma das áreas iA , temos
i
i
i
ii
A
xA
X
*
*
.
e
i
i
i
ii
A
yA
Y
*
*
.
(6.6)
Colocando-se: yiii QxA *. e xiii QyA *. podemos escrever as equações (6.6) na forma:
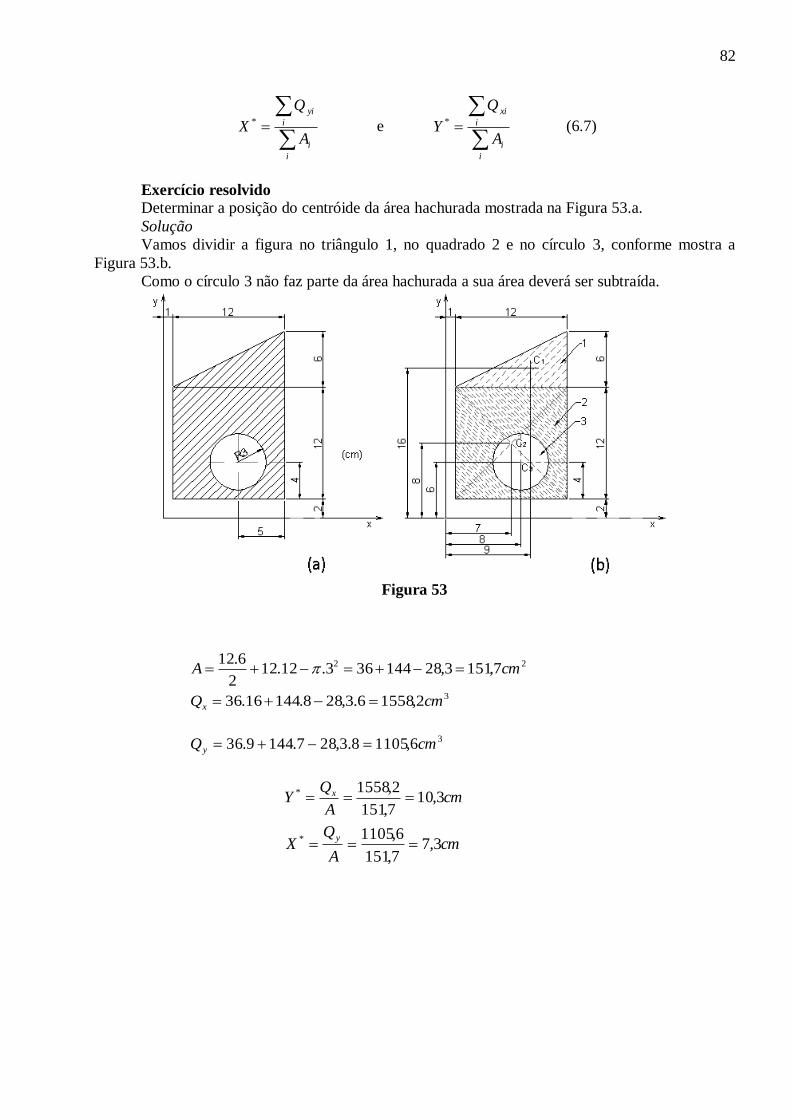
82
i
i
i
yi
A
Q
X * e
i
i
i
xi
A
Q
Y * (6.7)
Exercício resolvido
Determinar a posição do centróide da área hachurada mostrada na Figura 53.a.
Solução
Vamos dividir a figura no triângulo 1, no quadrado 2 e no círculo 3, conforme mostra a
Figura 53.b.
Como o círculo 3 não faz parte da área hachurada a sua área deverá ser subtraída.
Figura 53
22 7,1513,28144363.12.122
6.12cmA
32,15586.3,288.14416.36 cmQx
36,11058.3,287.1449.36 cmQy
cmA
QY x 3,10
7,151
2,1558*
cmA
QX
y3,7
7,151
6,1105*

83
6.5 Exercícios
Determinar o centróide das seguintes figuras:
a) b)
Respostas: a) cmYX 65,4*0* b) cmYX 5,1*0*
c)
Respostas: mmYmmX 3,27*8,41*

84
6.6 Momento de inércia (ou momento de segunda ordem)
a) Momento de inércia retangular
Consideremos a área A situada no plano xy (Figura 54.a) e o elemento de área dA de
coordenadas x e y.
Figura 54
Momento de inércia da área A em relação ao eixo x é determinado por
A
x dAyI .2 (6.7)
Momento de inércia da área A em relação ao eixo y é determinado por
A
y dAxI .2 (6.8)
Para o caso de um retângulo, de lados b e h, conforme mostrado na Figura 54.b, onde os
eixos dos x e y são eixos centroidais, isto é, são eixos passam pelo centróide da figura:
12
. 3hbI x
12
. 3bhI y
b) Momento de inércia polar
Definimos momento de inércia polar da área A em relação ao ponto O (Figura 55) à integral:
A
O dAJ .2 (5.9)
onde é a distancia do elemento dA à origem O.
Para o caso de um círculo de raio c, o momento de inércia polar em relação ao seu centro é
2
. 4cJO
(Ver Tabela 1 adiante para outras figuras geométricas)
Unidades: os momentos de inércia no SI são usualmente expressos em: 4m ou 4mm .
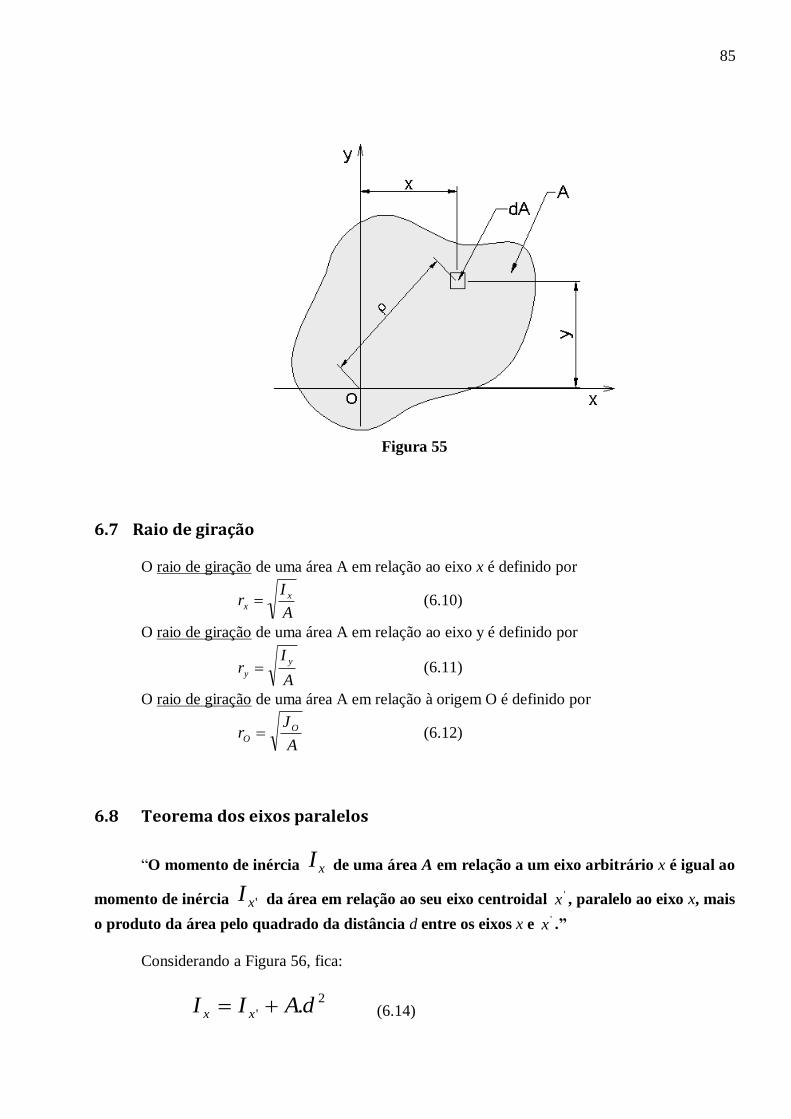
85
Figura 55
6.7 Raio de giração
O raio de giração de uma área A em relação ao eixo x é definido por
A
Ir x
x (6.10)
O raio de giração de uma área A em relação ao eixo y é definido por
A
Ir
y
y (6.11)
O raio de giração de uma área A em relação à origem O é definido por
A
Jr O
O (6.12)
6.8 Teorema dos eixos paralelos
“O momento de inércia xI de uma área A em relação a um eixo arbitrário x é igual ao
momento de inércia 'xI da área em relação ao seu eixo centroidal 'x , paralelo ao eixo x, mais
o produto da área pelo quadrado da distância d entre os eixos x e 'x .”
Considerando a Figura 56, fica:
2
' .dAII xx (6.14)
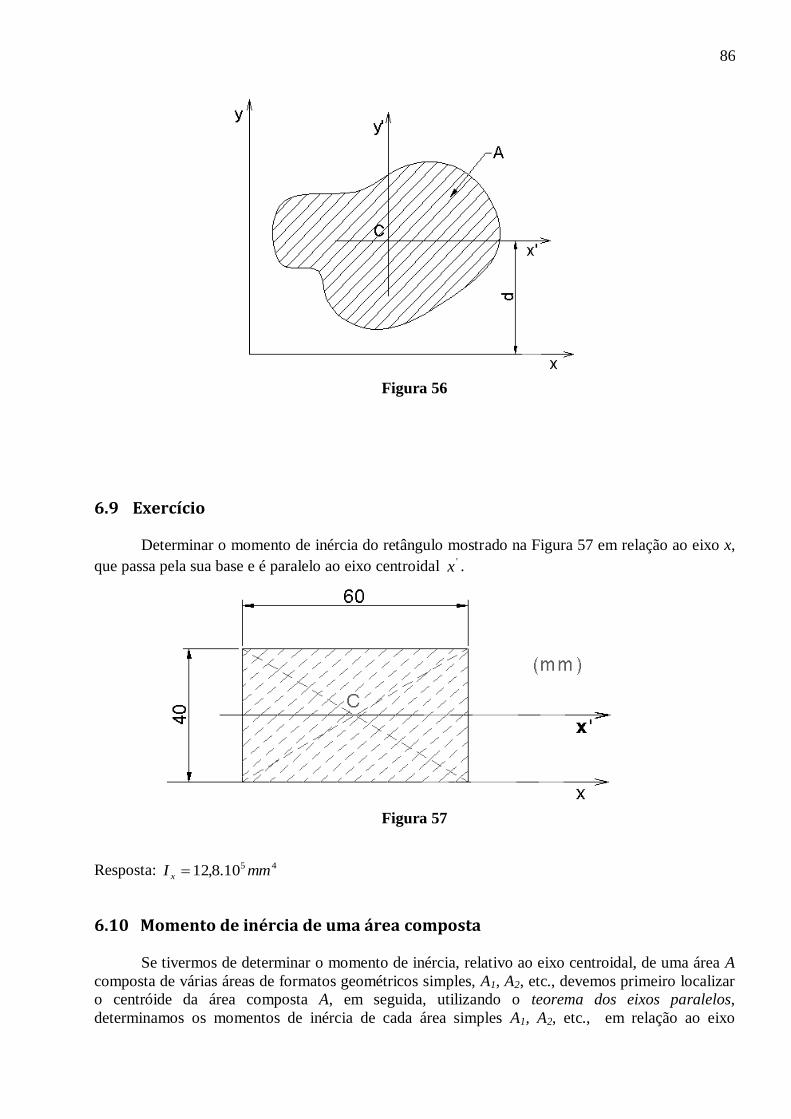
86
Figura 56
6.9 Exercício
Determinar o momento de inércia do retângulo mostrado na Figura 57 em relação ao eixo x,
que passa pela sua base e é paralelo ao eixo centroidal 'x .
Figura 57
Resposta: 4510.8,12 mmI x
6.10 Momento de inércia de uma área composta
Se tivermos de determinar o momento de inércia, relativo ao eixo centroidal, de uma área A
composta de várias áreas de formatos geométricos simples, A1, A2, etc., devemos primeiro localizar
o centróide da área composta A, em seguida, utilizando o teorema dos eixos paralelos,
determinamos os momentos de inércia de cada área simples A1, A2, etc., em relação ao eixo
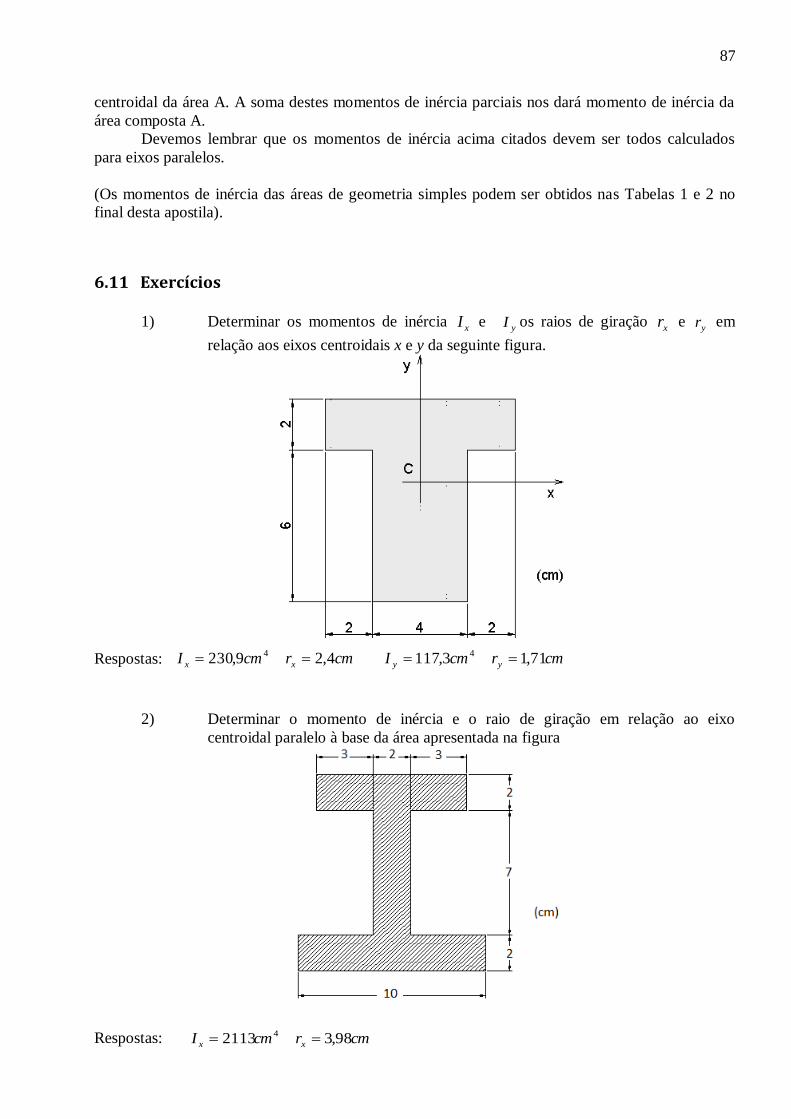
87
centroidal da área A. A soma destes momentos de inércia parciais nos dará momento de inércia da
área composta A.
Devemos lembrar que os momentos de inércia acima citados devem ser todos calculados
para eixos paralelos.
(Os momentos de inércia das áreas de geometria simples podem ser obtidos nas Tabelas 1 e 2 no
final desta apostila).
6.11 Exercícios
1) Determinar os momentos de inércia xI e
yI os raios de giração xr e
yr em
relação aos eixos centroidais x e y da seguinte figura.
Respostas: cmrcmIcmrcmI yyxx 71,13,1174,29,230 44
2) Determinar o momento de inércia e o raio de giração em relação ao eixo
centroidal paralelo à base da área apresentada na figura
Respostas: cmrcmI xx 98,32113 4
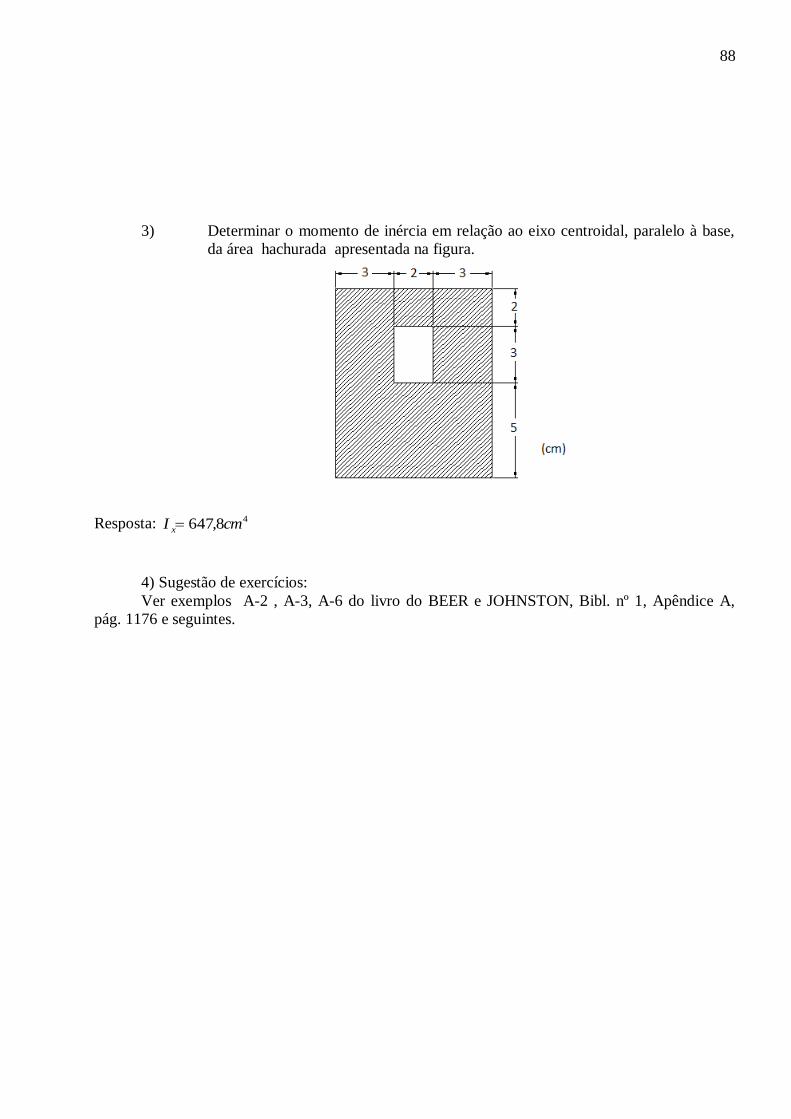
88
3) Determinar o momento de inércia em relação ao eixo centroidal, paralelo à base,
da área hachurada apresentada na figura.
Resposta: 48,647 cmI x
4) Sugestão de exercícios:
Ver exemplos A-2 , A-3, A-6 do livro do BEER e JOHNSTON, Bibl. nº 1, Apêndice A,
pág. 1176 e seguintes.
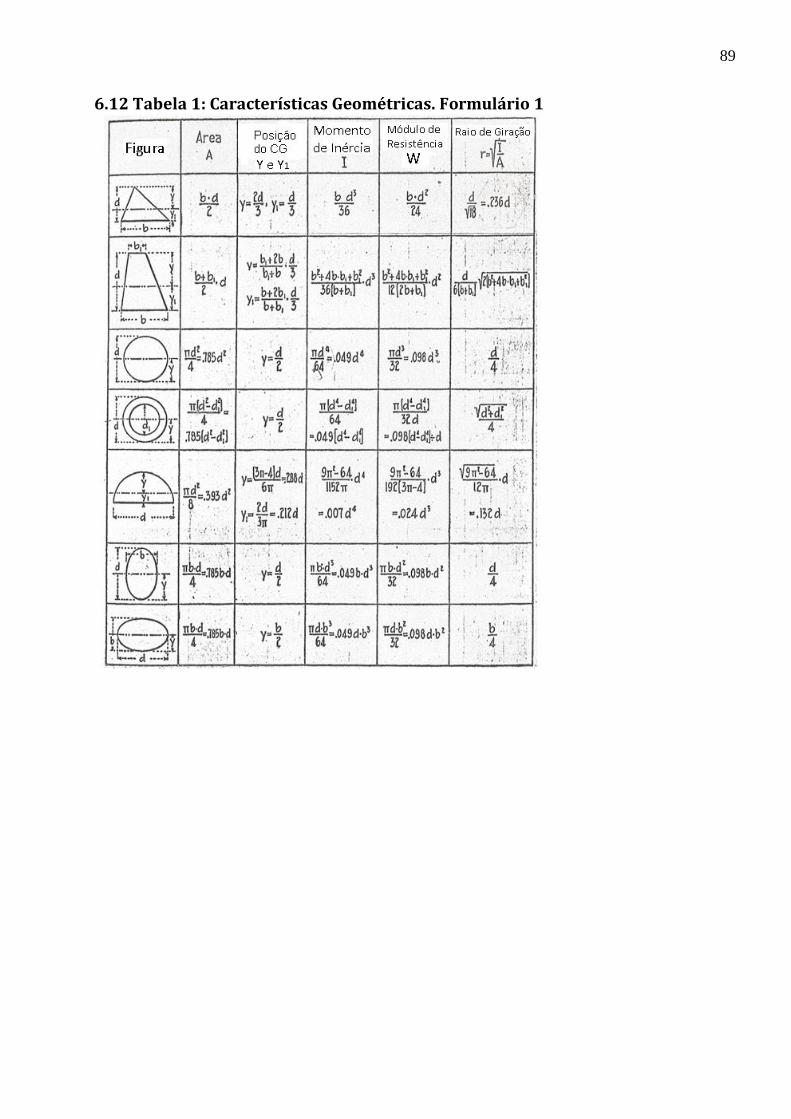
89
6.12 Tabela 1: Características Geométricas. Formulário 1
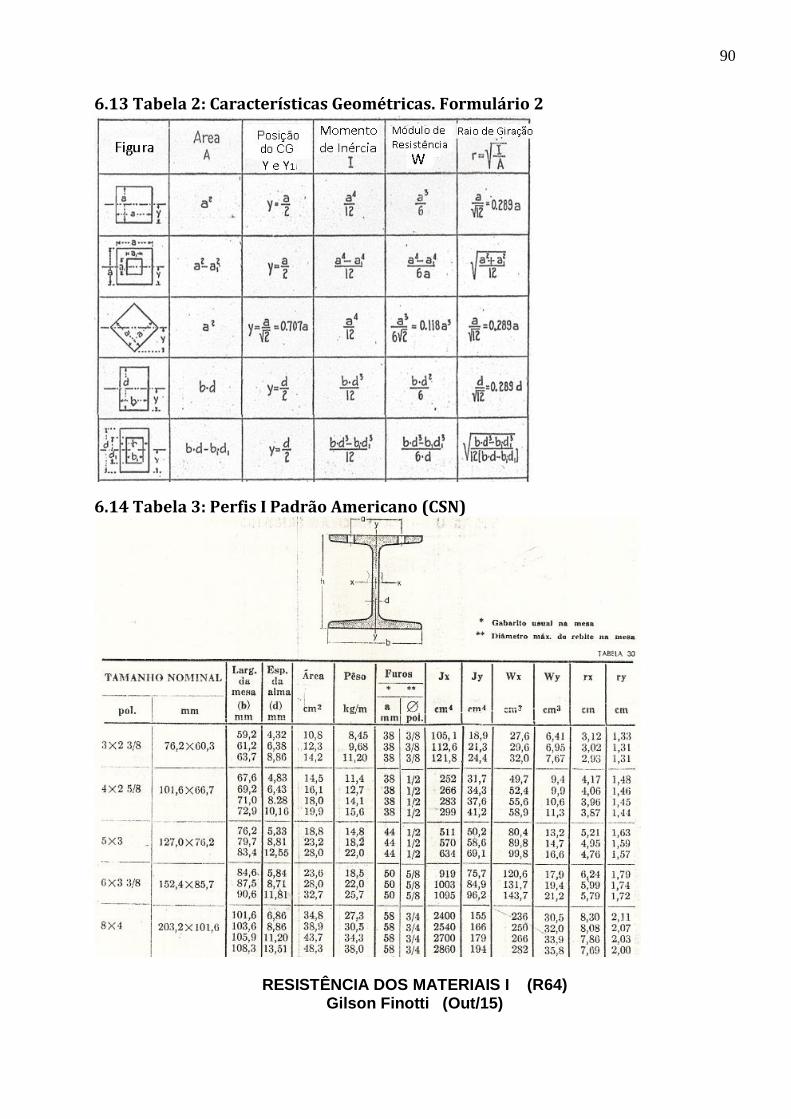
90
6.13 Tabela 2: Características Geométricas. Formulário 2
6.14 Tabela 3: Perfis I Padrão Americano (CSN)
RESISTÊNCIA DOS MATERIAIS I (R64) Gilson Finotti (Out/15)