Embed Size (px)
Citation preview

Sistemas Lineares e Invariantes:Tempo Contínuo e Tempo Discreto
Prof. José Maurício [email protected]
1

Definição de Sistemas
2
• Um sistema pode ser definido como um processo que realiza a transformação de sinais (Entrada/Saída) por uma Função de TransformaçãoFunção de Transformação T{.}T{.}
x(t) y(t)
x[n] y[n]
Sistema no Tempo Contínuo
Sistema no Tempo Discreto

Sistemas Lineares e Invariantes de Tempo
Contínuo
3

Sistemas Lineares de Tempo Contínuo• Um sistema Linear satisfaz o Princípio da SuperposiçãoPrincípio da Superposição, ou
seja, satisfaz as propriedades de:
Aditividade
Homogeneidade.
• O princípio de superposição é a base para o estudo aproximado de sistemas em diversas áreas da engenharia: Sistemas de Controle, Sistemas Preditores, Modelagem, etc.
4

Propriedade da Aditividade
5
1 1
1 2 1 2
2 2
( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( )
y t T x ty t y t y t T x t x t
y t T x t
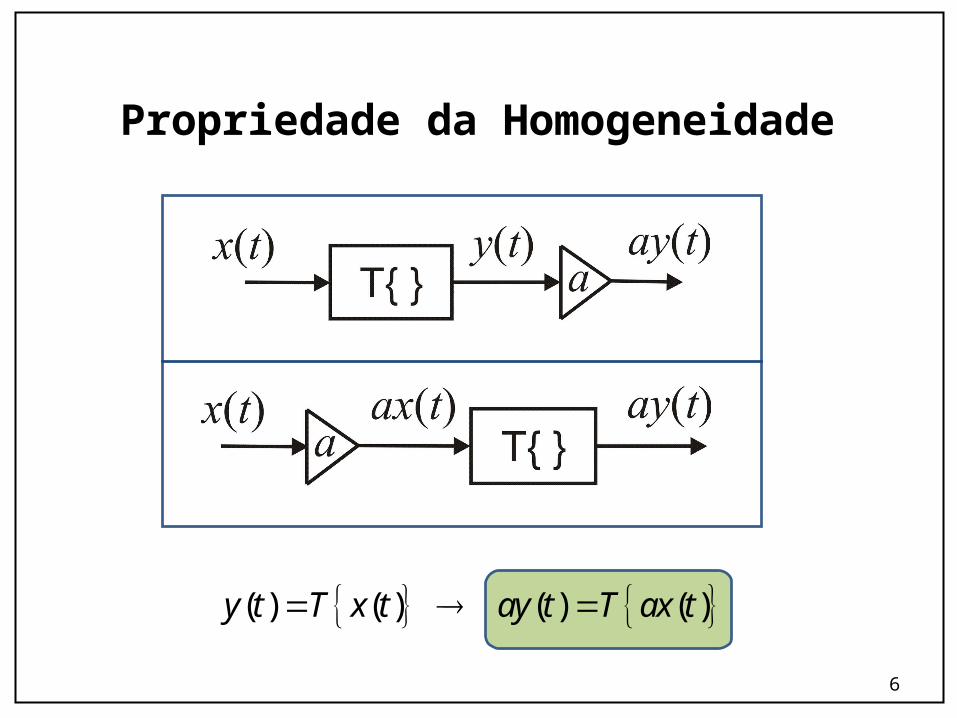
Propriedade da Homogeneidade
6
( ) ( ) ( ) ( )y t T x t ay t T ax t

Sistemas Invariantes de Tempo Contínuo
Deslocamento na saída
Deslocamentona entrada
• Um sistema é invariante no tempo invariante no tempo se para um deslocamento no tempo do sinal de entrada, este causa um deslocamento no tempo na sinal de saída
0 0
7
( ) { ( )}y t T x t
0 0( ) { ( )}y t t T x t t

Representação de Sistemas Lineares e Invariantes
• Os sistemas lineares e invariantes (LIT) no tempo contínuo são descritos utilizando equações diferenciais com coeficientes constantes.
• Para comprovar que um sistema LIT é linear e invariante pode se aplicar as provas de linearidade ou de invariância no tempo em cada operação.
8
0 0
( ) ( )k kN M
k kk kk k
d y t d x ta bdt dt
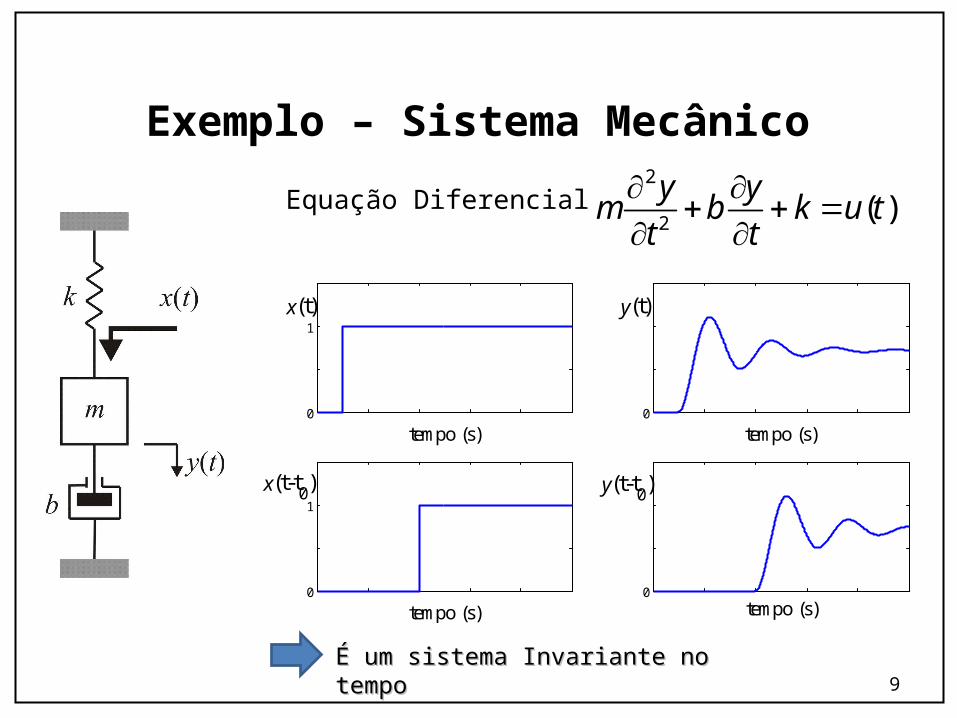
Exemplo – Sistema Mecânico
9
2
2 ( )y ym b k u tt t
Equação Diferencial
0
1
tempo (s)0
tempo (s)
0
1
tempo (s)0
tempo (s)
x(t-t0)
x(t)
y(t-t0)
y(t)
É um sistema Invariante no tempoÉ um sistema Invariante no tempo

O sistema mecânico é Linear?
10
2
2 ( )y ym b k u tt t
Aditividade
21 1
12
22 2
22
( )
( )
y ym b k x tt ty ym b k x tt t
21 2 1 2
1 22
( ) ( ) 2 ( ) ( )y y y ym b k x t x tt t
Homogeneidade
2
2
2
2
( )
( ) ( ) ( )
y ya m b k ax tt t
ay aym b ak ax tt t
2
2
( ) ( ) ( )ay aym b ak ax tt t
É um sistema Não LinearÉ um sistema Não Linear

Linear Invariante no Tempo
Não Linear Não Linear Variante no Tempo
Exemplo - Circuito Elétrico
11
( )2 3 ( ) ( )di t i t v tdt
2( )2 3 ( ) ( )di t i t v tdt
( )2 3 ( ) 4 ( )di t i t v tdt
( )2 3 ( ) ( )di t t i t v t
dt

Características de Sistemas Lineares e Invariantes
• A aplicação da superposiçãosuperposição em sistemas lineares constitui a base para a análise de sistemas, tais como:
A representação de um sinal arbitrário x(t) como uma soma ponderada de impulsos, é a base para o método de convolução.
A representação de um sinal x(t) como uma combinação linear de sinais harmônicos é a base para as séries de Fourier.
A representação de um sinal x(t) como uma série ponderada de exponenciais complexas é a base para as transformadas de Fourier e de Laplace.
12

Características de Sistemas Lineares e Invariantes
• Os sistemas lineares e invariantes no tempo contínuo podem ser analisados através de equações diferenciais.
• Para sistemas LIT é possível realizar o cálculo das respostas usando superposição mesmo tendo condições iniciais diferentes de zero.
• A desvantagem é que a medida que se incrementa a ordem do sistema, a formulação das equações diferenciais e a avaliação das condições iniciais torna-se muito complexa.
13

Características de Sistemas Lineares e Invariantes
• A representação de um sinal x[n] como uma soma ponderada de impulsos deslocados, é a base para o método de convolução discreta.
• A representação de um sinal x[n] como uma combinação linear de harmônicas ou exponenciais complexas, é a base da transformada de Fourier em tempo discreto (DTFT) e a transformada z.
14

Sistemas Lineares e Invariantes de Tempo Discreto
15

Sistemas Lineares de Tempo Discreto• Um sistema linear satisfaz o teorema da superposição e
implica que o sistema tem condições iniciais iguais a zero e que a equação do sistema envolva apenas operadores lineares.
• Pode–se utilizar a superposiçãosuperposição para um sistema com condições iniciais distintas de zero, se o sistema for linear. – Neste caso, deve-se considerar o sistema como tendo
entradas múltiplas e as condições iniciais como entradas adicionais.
16
Sistemas Lineares de Tempo Discreto• Como resultado, a resposta de um sistema pode ser obtida
a partir da soma de uma resposta de entrada zero (devido apenas às condições iniciais) e uma resposta de estado zero (devido apenas à entrada).
• Este princípio de decomposição, permite analisar sistemas lineares na presença de condições iniciais distintas de zero. Tanto a entrada quanto a resposta de estado zero obedecem à superposição.
17

Sistemas Invariante de Tempo Discreto• Em um sistema invariante de tempo discreto a forma da
resposta y[n] depende unicamente da forma da entrada x[n] e não do instante de tempo que é aplicada.
18
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
[ ] sin( . [ ])y n a x n
Deslocamento na saída duas unidades de tempo
Deslocamento na entrada duas unidades de tempo
Causalidade de um Sistema LIT
• A saída de um sistema causal somente depende dos valores atuais e passados da entrada .
• Para que um sistema LIT seja causal, y[n] não deve depender de x[k], para k>n:
então, os coeficientes h[n-k] que multiplicam a x[k] para k>n devem ser zero, portanto h[n]=0 para n<0
19
[ ] [ ] [ ]k
y n x k h n k

Causalidade de um Sistema LIT
• Para um sistema LIT discreto causal, como h[n]=0, para n<0:
• Ou de forma equivalente:
20
[ ] [ ] [ ]n
k
y n x k h n k
0
[ ] [ ] [ ]k
y n h k x n k

Representação de Sistemas Lineares e Invariantes
• Para saber se um sistema é linear ou invariante no tempo discreto, deve-se considerar que: Os termos que contêm produtos da entrada e/ou saída
trazem como consequência a não linearidade do sistema.
Um termo constante também torna não linear o sistema.
Os coeficientes da entrada ou da saída que são funções explícitas de “n” tornam o sistema variante no tempo.
As entradas ou saídas multiplicadas no tempo por um escalar, por exemplo y[2n], também tornam o sistema variante no tempo.
21

Representação de Sistemas Lineares e Invariantes
22
• Uma sequência discreta x[n] pode ser expressa em termos de uma somatória de impulsos unitários escalados e deslocados no tempo.
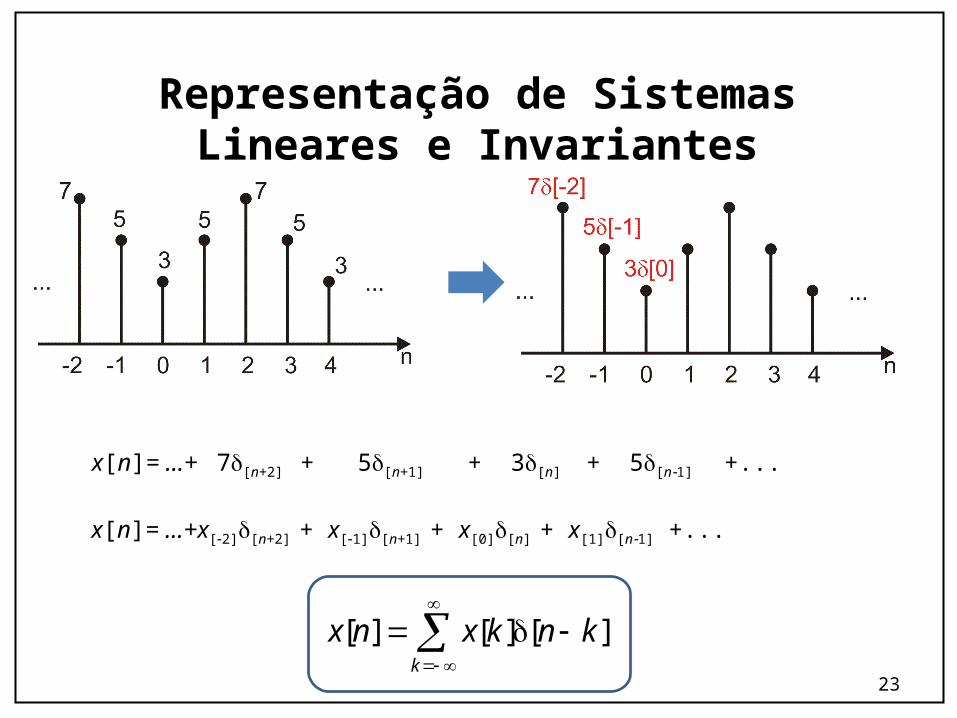
Representação de Sistemas Lineares e Invariantes
23
x[n]= …+ 7[n+2] + 5[n+1] + 3[n] + 5[n1] +...
x[n]= …+x[2][n+2] + x[1][n+1] + x[0][n] + x[1][n1] +...
[ ] [ ] [ ]k
x n x k n k

• A resposta ao impulso é a resposta de um Sistema Linear a um impulso localizado no instante k
• Sendo o sistema invariante no tempo:
Representação de Sistemas Lineares e Invariantes
T { }[n-k] hk[n]
knTnhk
24
knhknTnhk

Representação de Sistemas Lineares e Invariantes
T { }x[n] y[n]
Se a entrada x[n] é uma sequência representada por uma somatória de impulsos
kknkxnx
kknkxTny
kknTkxny
25
kknhkxny

k k
y n x k h n k h k x n k
Conhecida a resposta ao impulso h[n], é possível calcular a resposta a qualquer sinal de entrada, através da somatória da Convolução.
Somatoria da Convolução
[ ]* [ ]y n x n h n h n x n
26
Representação de Sistemas Lineares e Invariantes





























