Embed Size (px)
Citation preview

Sistemas Realimentados
Projeto de Sistemas de Controle no Espaço de Estados

Conteúdo
• Sistemas Reguladores e Sistemas de Controle• Projeto por Alocação de Polos;• Projeto de Servosistemas.

Sistemas Reguladores e Sistemas de Controle
Sistemas Reguladores: são sistemas onde o sinal de referência é constante, incluindo o zero.
Sistemas Controle: são sistemas onde o sinal de referência varia com o tempo.

Projeto Por Alocação de Polos
• Em projetos convencionais, alocamos apenas os pólos de malha-fechada dominantes;
• Nesta abordagem moderna, todos os polos de malha-fechada são alocadas;
• Condição necessária: O sistema original tem que ser de estado completamente controlável.

Projeto Por Alocação de Polos
Considere o sistema de controle
Escolheremos o sinal de controle
Logo, o sinal de controle é determinado por um estado instantâneo.
Este esquema é denominado realimentação de estado.
A matriz K de ordem 1xn é denominada matriz de ganho de realimentação de estado.

Projeto Por Alocação de Polos
Sistema Regulador!

Projeto Por Alocação de Polos
Características do Sistema Regulador: Sistema de malha-fechada sem entradas; Equivalente a entradas de referência nulas; Objetivo de manter a saída nula; Distúrbios podem tornar a saída não-nula.

Projeto Por Alocação de Polos
Substituindo a entrada de controle na equação do sistema de controle
temos:
Cuja solução é
onde x(0) é o estado inicial causado pelos distúrbios externos.

Projeto Por Alocação de Polos
Logo, considerando a solução
A estabilidade e as características temporais do sistema são determinadas pelos autorvalores da matriz A-BK.
Logo, se a matriz K for corretamente escolhida, então a matriz A-BK poderá ser assintoticamente estável e, para todo x(0)≠0, será possível fazer x(t) tender a 0, à medida que t tende a infinito.

Projeto Por Alocação de Polos
Condição necessária para alocação de polos
Sistema original deve ser de estado completamente controlável (prova apresentada no livro).

Projeto Por Alocação de Polos
Determinação da matriz K através da matriz de transformação T
Suponha que o sistema seja definido por
e que o sinal de controle seja definido por
Então, a matriz de ganho K de realimentação que força os autovalores de A-BK a serem valores desejados pode ser determinada como segue:

Projeto Por Alocação de Polos
Determinação da matriz K através da matriz de transformação T
Etapa 1) Verifique se o sistema é de estado completamente controlável;
Etapa 2) Determinar os coeficientes ai da equação característica

Projeto Por Alocação de Polos
Determinação da matriz K através da matriz de transformação TEtapa 3) Determinar a matriz de transformação T que transforma a equação de estado do sistema na forma canônica controlável
Onde é a matriz de controlabilidade e

Projeto Por Alocação de Polos
Determinação da matriz K através da matriz de transformação TEtapa 4) Com os autovalores desejados, escreva o polinômio característico desejado
e determine os αi.
Etapa 5)

Projeto Por Alocação de Polos
Determinação da matriz K por substituição direta
Indicada para sistemas de baixa ordem (n≤3).
No caso de n=3, então
Logo
onde ambos os lados da equação são polinômios em s.

Projeto Por Alocação de Polos
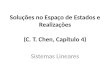
Exemplo 1: Considere o sistema regulador da figura abaixo, cuja planta é dada por
Onde
e
Desejamos que os polos
de malha-fechada sejam:
K=?

Projeto Por Alocação de Polos
Solução: Primeiro precisamos verificar se o sistema é de estado completamente controlável.
Como |M|=-1, então o posto de M é igual a 3. Logo, o sistema é de estado completamente controlável e a alocação arbitrária de polos é possível.

Projeto Por Alocação de Polos
Solução: Vamos aplicar os dois métodos apresentados para a determinação de K.
Método 1)

Projeto Por Alocação de Polos
Método 1)
Logo, a equação característica desejada é
De modo que
Como
onde T=I para este caso, uma vez que a equação de estado é fornecida na forma canônica controlável.

Projeto Por Alocação de Polos
Método 1) Então

Projeto Por Alocação de Polos
Método 2) Definimos a matriz de ganho desejado
Equação característica desejada.

Projeto Por Alocação de Polos
Método 2)
Logo

Projeto de Servossistemas
Projeto de servossistemas do tipo 1 quando a planta possui um integrador
Suponha que a planta seja definida por
E um controle por realimentação de estado dado por

Projeto de Servossistemas

Projeto de Servossistemas
Projeto de servossistemas do tipo 1 quando a planta possui um integrador
Logo
Supondo que a entrada de referência é uma função degrau, então
u

Projeto de Servossistemas
Projeto de servossistemas do tipo 1 quando a planta possui um integrador
Definindo
Então, a dinâmica do erro é dada por
Logo, se o sistema for de estado completamente controlável, então poderemos definir autovalores desejados da matriz A-BK através da técnica de alocação de pólos.

Projeto de Servossistemas
Projeto de servossistemas do tipo 1 quando a planta possui um integrador
No regime permanente (t=∞), temos que