Embed Size (px)
Citation preview

Universidade Federal de Uberlândia Faculdade de Engenharia Elétrica
Graduação em Engenharia Biomédica
Eduardo Morais Carvalho
Protótipo de um dispositivo para captura de movimen tos dos membros superiores em tempo real usando sensores inerciais
Uberlândia 2016

Eduardo Morais Carvalho
Protótipo de um dispositivo para captura de movimen tos dos membros superiores em tempo real usando sensores inerciais
Trabalho apresentado como requisito parcial de avaliação na disciplina Trabalho de Conclusão de Curso de Engenharia Biomédica da Universidade Federal de Uberlândia.
Orientador: Prof. Dr. Alcimar Barbosa Soares
______________________________________________ Assinatura do Orientador
Uberlândia 2016

Dedico este trabalho aos meus pais, Alberani
Fernandes Carvalho e Sirlene Morais Carvalho, ao
meu irmão Matheus Morais Carvalho e a todos
meus amigos.
AGRADECIMENTOS
Ao Professor Dr. Alcimar Barbosa Soares principalmente pelo incentivo, motivação e
orientação neste trabalho, agradeço também toda a equipe do Laboratório de Engenharia
Biomédica (BioLab) por todas oportunidades de conhecimento oferecidas, ao apoio durante todo
o projeto e pelo café todos dias.
Ao meus pais Alberani Fernandes Carvalho e Sirlene Morais Carvalho por sempre
acreditarem na minha capacidade, por me apoiarem em todas as minhas decisões e por sempre
permanecerem ao meu lado.
Aos meus amigos Leonardo Frederice Sciacca e Ingrid Wutke Oliveira por toda a ajuda
neste projeto e pela amizade em todos esses anos.
A todos os professores, técnicos e funcionários da Faculdade de Engenharia Elétrica que
fizeram parte da minha formação.
A Universidade Federal de Uberlândia pela formação de qualidade.

RESUMO
O interesse em rastrear e analisar o movimento do corpo humano tem sido motivado pela
grande matriz de suas aplicações, tais como, o controle de equipamentos eletrônicos, produção e
animação de filmes, videogames, treinamento de atletas, diagnóstico do estado de saúde de
pacientes, reabilitação, análise da biomecânica corporal e diversas outras aplicações.
Compreender o processo de funcionamento da biomecânica humana pode fornecer uma visão
importante sobre os mecanismos neurais de aprendizagem motora e adaptação, sabendo disso,
grupos de pesquisa de várias áreas, como a medicina e a engenharia, têm estudado o
movimento do corpo para melhor entender a motricidade humana e desenvolver métodos de
tratamento que visam reforçar a mobilidade de pessoas com limitações funcionais e motoras.
Atualmente, já existem no mercado diferentes formas e métodos para captura de movimento.
Sistemas mecânicos, ópticos, magnéticos, acústicos e inerciais, embora cada um desses
sistemas tenha suas próprias vantagens, todos eles sofrem de diversas limitações e
desvantagens. Para contornar todas as limitações desses sistemas, o objetivo desse projeto é
propor um protótipo de rastreamento de movimentos dos membros superiores utilizando sensores
inerciais (acelerômetro, giroscópio) em conjunto com sensores magnéticos (magnetômetros). O
protótipo consiste em um conjunto de módulos GY87 que contêm os sensores inerciais e
magnético, cada módulo é acoplado a um segmento do corpo (braço e antebraço) sendo que
uma é a referência posicionada no centro da dorsal ou peitoral do usuário. Para contornar os
problemas encontrados nas rotações usando os ângulos de Euler e matrizes de rotações, o
sistema proposto aborda o conceito dos quaternions. Para a aquisição, processamento e
representação tridimensional da estrutura biomecânica dos segmentos é feito em uma aplicação
em MATLAB. Para a validação do protótipo foi realizada uma sequência de testes para mensurar
os ângulos com um sensor, dois sensores, posteriormente três sensores foram acoplados aos
segmentos dos membros superiores de um usuário para avaliar a capacidade do protótipo em
capturar movimentos.

ABSTRACT
The interest in track and analyze human body movement has been driven by the large
matrix of its applications, such as the control of electronics devices, production and animation of
films, video games, training athletes, diagnosis of the health status of patients, rehabilitation,
analysis of body biomechanics and many other applications. Understand the working process of
human biomechanics can provide an important insight into the neural mechanisms of motor
learning and adaptation, knowing this, research groups from different fields, such as medicine and
engineering, have studied body movement to better understand the human motor skills and
develop treatment methods aimed at enhancing the mobility of people with functional and motor
limitations. Nowadays, there are already on the market different ways and methods for motion
capture. Mechanical, optical, magnetic, acoustic and inertial systems, although each of these
systems has its own advantages, they all suffer from several limitations and disadvantages. In
order to circumvent any limitations of these systems, the aim of this project is to propose a
tracking system of the upper limbs using inertial sensors (accelerometer, gyroscope) with
magnetic sensors (magnetometers). The prototype consists in a set of three GY87 containing
magnetic and inertial sensors on the same module, each board is coupled to a body segment
(arm and forearm) with the reference board positioned in the center of the back of the user. To get
around with the problems founded in rotations using Euler angles and matrices of rotations, the
proposed system addresses the concept of quaternions. For the acquisition, processing and three
dimensional representation of the biomechanics of the segments of the body an application is
made on MATLAB. To validate the prototype a sequence of tests was performed to measure the
angles with one and two sensors, later three sensor were attached to the segments of the upper
limbs of a user to validate the capacity of the prototype to capture motion.

LISTA DE ILUSTRAÇÕES
Figura 1: Representação de um sistema ótico para captura de movimentos do corpo humano (OPTITRACK, 2016). ...................................................................................................................... 11 Figura 2: Principio do tempo de voo para determinação da distância entre a fonte e um objeto adaptado de (HANSARD, LEE e CHOI, 2013). .............................................................................. 12 Figura 3: Goniômetro mecânico - Régua e Transferidor. Extraído de (CARCI, 2016). ................ 13 Figura 4: Exemplo de aplicação dos ângulos de Euler. Adaptado de (KIM, 2013). ....................... 17 Figura 5: Representação do sistema de referência inercial. Adaptado de (ROBOTICS, 2016). ... 20 Figura 6: Visão sistêmica de um sensor inercial. ........................................................................... 26 Figura 7: Estrutura de um acelerômetro de dois eixos. Adaptado de (TORRES, 2016). .............. 28 Figura 8: Estrutura de um giroscópio de um eixo. Adaptado de (TORRES, 2016)........................ 29 Figura 9: Configuração original do efeito hall. ................................................................................ 30 Figura 10: Diagrama básico de conexão do barramento I2C. Adaptado de (RODRIGUES, 2014). ........................................................................................................................................................ 34 Figura 11: Instruções básicas para escrita e leitura usando I2C. Adaptado de (RODRIGUES, 2014). .............................................................................................................................................. 35 Figura 12: Diagrama de conexão e posicionamento dos sensores sobre os membros superiores e as posições que serão calculadas pela aplicação. ........................................................................ 43 Figura 13: Módulo GY 87. .............................................................................................................. 43 Figura 14: Esquema elétrico completo do modulo de comunicação dos sensores com o computador HOST. ......................................................................................................................... 46 Figura 15: Interface do aplicativo de aquisição e processamento dos sinais. ............................... 49 Figura 16: Acelerômetro. GY 87 parado sobre a mesa, com o eixo Z apontando para baixo. ...... 49 Figura 17: Giróscopio. GY 87 parado sobre a mesa, com o eixo Z apontando para baixo. .......... 50 Figura 18: Magnetómetro. GY 87 parado sobre a mesa, com eixo Z apontando para baixo. ....... 50 Figura 19: Esquema para medir ângulos no plano XY usando apenas um sensor. ...................... 52 Figura 20: Representação de um sensor no plano tridimensional formando um ângulo de 90º com o plano xy. ...................................................................................................................................... 53 Figura 21: Representação de um sensor no plano XY formando um ângulo de 90º com o plano XY. .................................................................................................................................................. 53 Figura 22: Representação de um sensor no plano XZ formando um ângulo de 90º com o plano XY. .................................................................................................................................................. 54 Figura 23: Representação de um sensor no plano XZ formando um ângulo de 90º com o plano XY. .................................................................................................................................................. 54 Figura 24: Estrutura de madeira para avaliação da aplicabilidade do quaternions. ...................... 56 Figura 25: Representação da segunda etapa de validação do protótipo usando a estrutura de madeira com dois sensores. ........................................................................................................... 56 Figura 26: Avaliação do protótipo - Posição T (Referência)........................................................... 58 Figura 27: Avaliação do protótipo - Posição T (Referência) – MATLAB. ....................................... 58 Figura 28: Avaliação do protótipo - Flexão do braço e antebraço. .................................. 60 Figura 29: Avaliação do protótipo - Flexão do braço e antebraço – MATLAB. .............................. 60 Figura 30: Avaliação do protótipo - Flexão do antebraço. .............................................................. 61 Figura 31: Avaliação do protótipo - Flexão do antebraço - MATLAB. ............................................ 61 Figura 32: Avaliação do protótipo - Rotação da articulação do ombro – MATLAB. ....................... 61

LISTA DE TABELAS
Tabela 1: Tabela de propriedades dos Quaternions – Adição. ...................................................... 19 Tabela 2: Tabela de propriedades dos Quaternions - Produto. ..................................................... 19 Tabela 3: Angulo Real mensurado pelo transferidor e Ângulo mensurado pelos sensores no plano xy. ......................................................................................................................................... 55 Tabela 4: Angulo Real mensurado pelo transferidor e Ângulo mensurado entre os dois sensores. ........................................................................................................................................................ 57

LISTA DE ABREVIATURAS E SIGLAS
UFU – Universidade Federal de Uberlândia
FEELT – Faculdade de Engenharia Elétrica
ABNT – Associação Brasileira de Normas Técnicas
MOCAP – Motion Capture
ADM – Amplitude do Movimento Articular
WBAN - Wireless Body Area Networks
MEMS - Microelectromechanical Systems
IMU – Inertial Measurement Unit
INS – Inertial Navigation System
I2C – Inter-Integrated Circuit
SLC – Serial Clock
SDA – Serial Data
CPU – Central Processing Unit
GPS – Global Positioning System
MARG – Angular Rate and Gravity Sensor
RMS – Root Mean Square
EKF – Extended Kalman Filter
MPU – Motion Processing Unit
CI – Circuito Integrado
DMP – Digital Motion Processor

SUMÁRIO
1 INTRODUÇÃO ............................................................................................................................ 11
2 REVISÃO BIBLIOGRÁFICA ........................... ............................................................................ 15
2.1 ÂNGULOS DE EULER ................................................................................................................................................................. 15 2.2 QUATERNIONS ......................................................................................................................................................................... 17 2.3 CINEMÁTICA DIRETA ................................................................................................................................................................ 23 2.4 MEMS - SISTEMAS MICROELETROMECÂNICOS ....................................................................................................................... 24 2.5 SENSORES INERCIAIS ................................................................................................................................................................ 25
2.5.1 ACELERÔMETRO .............................................................................................................................................................. 27 2.5.2 GIROSCÓPIO .................................................................................................................................................................... 29
2.6 SENSORES MAGNÉTICOS - MAGNETÔMETRO ......................................................................................................................... 30 2.7 UNIDADES DE MEDIÇÃO INERCIAL E MAGNÉTICA ................................................................................................................... 31 2.8 PROTOCOLO DE COMUNICAÇÃO I2C ....................................................................................................................................... 33
3 RASTREAMENTO INERCIAL – ESTADO DA ARTE .......... ...................................................... 35
4 PROPOSTA DE UM SISTEMA DE RASTREAMENTO INERCIAL P ARA MEMBROS SUPERIORES ................................................................................................................................ 42
4.1 MÓDULO INERCIAL GY87 ......................................................................................................................................................... 43 4.2 MÓDULO DE INTEGRAÇÃO DA COMUNICAÇÃO DOS SENSORES COM O COMPUTADOR HOST ............................................. 45 4.3 MODELAGEM MATEMÁTICA .................................................................................................................................................... 47 4.4 APLICATIVO DE SOFTWARE PARA COLETA E PROCESSAMENTO DE DADOS ............................................................................ 48
5 EXPERIMENTOS DE VALIDAÇÃO ....................... ..................................................................... 49
5.1 SENSOR ESTACIONÁRIO ........................................................................................................................................................... 49 5.2 UM SENSOR EM DESLOCAMENTO ANGULAR .......................................................................................................................... 51 5.3 DOIS SENSORES EM DESLOCAMENTO ANGULAR .................................................................................................................... 55 5.4 TRÊS SENSORES ACOPLADOS À MEMBROS SUPERIORES DE USUÁRIOS.................................................................................. 57
6 DISCUSSÃO ............................................................................................................................... 62
7 CONCLUSÃO ....................................... ....................................................................................... 64
8 REFERÊNCIAS BIBLIOGRÁFICAS ...................... ..................................................................... 66
9 ANEXOS ...................................................................................................................................... 69
9.1 ESQUEMA ELÉTRICO MÓDULO GY 87 ...................................................................................................................................... 70 9.2 ESPECIFICAÇÕES DO SENSOR MPU6050 – ACELERÔMETRO ................................................................................................... 71 9.3 ESPECIFICAÇÕES DO SENSOR MPU6050 – GIRÓSCOPIO .......................................................................................................... 72 9.4 ESPECIFICAÇÕES DO SENSOR HMC5883L ................................................................................................................................ 73

1 INTRODUÇÃO
O interesse em rastrear
grande matriz de suas aplicações, tais como, o controle de equipamentos eletrônicos, produção
animação de filmes, videogames, treinamento de atletas, diagnóstico do estado de saúde de
pacientes, reabilitação, análise da biomecânica corporal e diversas outras aplicações
Compreender o processo de funcionamento da biomecânica humana pode fornecer uma
visão importante sobre os mecanismos neurais de aprendizagem motora e adaptação
sabendo disso, grupos de pesquisa de várias áreas como a medicina e a engenharia têm
estudado a biomecânica do corpo
desenvolver métodos de tratamento que visam reforçar a mobilidade de pessoas com limit
funcionais e motoras.
O rastreamento contínuo dos movimentos de uma pessoa
apresenta, potencialmente, um feedback mais preciso e intuitivo do que as configurações de um
laboratório podem fornecer.
movimento de um paciente a qualquer hora
instalações e dos próprios dispositivos de rastreamento, tais como os sistemas
e os dispositivos mecânicos,
Atualmente, já existem no mercado
movimento. Sistemas mecânicos, ópticos, magnéticos, acústicos e inerciais, embora cada um
desses sistemas tenha suas próprias vantagens, todos eles sofrem de dive
desvantagens.
Figura 1 : Representação de um sistema ótico para captura de movimentos do corpo humano
rastrear e analisar o movimento do corpo humano tem sido motivad
grande matriz de suas aplicações, tais como, o controle de equipamentos eletrônicos, produção
filmes, videogames, treinamento de atletas, diagnóstico do estado de saúde de
nálise da biomecânica corporal e diversas outras aplicações
Compreender o processo de funcionamento da biomecânica humana pode fornecer uma
visão importante sobre os mecanismos neurais de aprendizagem motora e adaptação
pos de pesquisa de várias áreas como a medicina e a engenharia têm
do corpo humano para melhor entender a motricidade
desenvolver métodos de tratamento que visam reforçar a mobilidade de pessoas com limit
contínuo dos movimentos de uma pessoa em ambientes naturais
apresenta, potencialmente, um feedback mais preciso e intuitivo do que as configurações de um
laboratório podem fornecer. Atualmente, no entanto, é difícil atingir o objetivo de ra
movimento de um paciente a qualquer hora e em qualquer lugar. Essa restrição vem das
instalações e dos próprios dispositivos de rastreamento, tais como os sistemas
, como os goniômetros.
, já existem no mercado diferentes formas e métodos para captura de
movimento. Sistemas mecânicos, ópticos, magnéticos, acústicos e inerciais, embora cada um
desses sistemas tenha suas próprias vantagens, todos eles sofrem de dive
: Representação de um sistema ótico para captura de movimentos do corpo humano 2016).
11
e analisar o movimento do corpo humano tem sido motivado pela
grande matriz de suas aplicações, tais como, o controle de equipamentos eletrônicos, produção e
filmes, videogames, treinamento de atletas, diagnóstico do estado de saúde de
nálise da biomecânica corporal e diversas outras aplicações.
Compreender o processo de funcionamento da biomecânica humana pode fornecer uma
visão importante sobre os mecanismos neurais de aprendizagem motora e adaptação ao meio,
pos de pesquisa de várias áreas como a medicina e a engenharia têm
motricidade humana e
desenvolver métodos de tratamento que visam reforçar a mobilidade de pessoas com limitações
em ambientes naturais
apresenta, potencialmente, um feedback mais preciso e intuitivo do que as configurações de um
ícil atingir o objetivo de rastreio do
em qualquer lugar. Essa restrição vem das
instalações e dos próprios dispositivos de rastreamento, tais como os sistemas de captura visuais
diferentes formas e métodos para captura de
movimento. Sistemas mecânicos, ópticos, magnéticos, acústicos e inerciais, embora cada um
desses sistemas tenha suas próprias vantagens, todos eles sofrem de diversas limitações e
: Representação de um sistema ótico para captura de movimentos do corpo humano (OPTITRACK,

12
Os sistemas de captura do tipo óptico, por exemplo, são compostos por: fontes de luz ou
refletores acoplados ao corpo da pessoa representando as articulações, sensores ópticos e
câmeras de vídeo que são posicionados no ambiente para fazer a captura das ondas
eletromagnéticas. O esquema de funcionamento desses sistemas é ilustrado na Figura 1.
Em geral os sistemas de captura de movimentos óticos disponíveis comercialmente são
caros, o que faz com que sejam acessíveis apenas a grandes empresas de entretenimento e
grandes laboratórios de pesquisa. Além do alto custo, os sistemas óticos de captura de
movimentos apresentam problemas como à oclusão dos marcadores, necessidade de pós-
processamento para a identificação das juntas.
Outros sensores utilizados para análise e captura dos movimentos do corpo humano são
os sensores ultrassónicos. Conhecendo a velocidade com o à qual o som se propaga através do
ar é possível medir o tempo que leva para enviar a onda de ultrassom e receber a onda refletida
de um determinado objeto, dessa forma, conhecendo o princípio do tempo de voo (Time of Flight
– TOF) de uma onda emitida e sua reflexão (HANSARD, LEE e CHOI, 2013), é possível
reconstruir uma imagem que representa o objeto alvo, Figura 2. Entretanto, sistemas de captura
que utilizam sensores ultrassónicos também estão sujeitos aos mesmos problemas que
apresentam os sistemas de captura baseados em câmeras de vídeo e refletores, como a oclusão
dos marcadores e as juntas articulares, erros de detecção do sinal refletido e principalmente o
preço.
Figura 2: Principio do tempo de voo para determinaç ão da distância entre a fonte e um objeto adaptado de
(HANSARD, LEE e CHOI, 2013).
Outra técnica para análise de movimentos bastante utilizada na área da saúde é a
Goniometria, técnica de medir ângulos (FERREIRA, 2010). A Goniometria, descrita na literatura
desde 1914, é amplamente usada, tanto na prática clínica quanto em pesquisas científicas, com a
finalidade de medir a Amplitude do Movimento Articular (ADM), de diversas articulações
(MARQUES, 2003). O dispositivo usado para realizar um procedimento de Goniometria é

13
denominado Goniômetro (Figura 3). Entre os goniômetros está o transferidor, um semicírculo de
plástico transparente ou um círculo graduado utilizado para medir ou construir ângulos.
A medida da ADM é uma componente importante na avaliação física pois identifica as
limitações articulares bem como permite aos profissionais acompanharem, de modo quantitativo,
a eficácia das intervenções terapêuticas durante o processo de reabilitação. O instrumento mais
utilizado pelos terapeutas para medir a ADM é o goniômetro. No entanto, há também outros
instrumentos capazes de mensurar a ADM, como o dinamômetro isocinético. Nas últimas
décadas houve um grande aumento no uso deste instrumento em várias áreas, dentre elas a
fisioterapia, que tem se beneficiado de forma particular e significativa desta tecnologia.
Estes dispositivos, os goniômetros, fornecem dados sobre os ângulos articulares e
através de algoritmos matemáticos e estudo da cinemática direta e inversa é possível determinar
a postura corporal e a amplitude de movimentação dos membros superiores e inferiores. A
principal vantagem desses dispositivos é o preço, entretanto, a fixação e o posicionamento dos
goniômetros apresentam diversos problemas. O tecido mole do corpo permite que o dispositivo
de medição se desloque durante o movimento das articulações, mesmo os goniômetros atuais
apresentam algumas dificuldades para estabelecer o alinhamento correto com as articulações do
corpo, especialmente as articulações com vários graus de liberdade como é caso do ombro.
Na tentativa de contornar todos esses problemas descritos, o uso de sensores inerciais
tornou-se uma prática comum na análise de movimento ambulatorial. Sensores inerciais foram
utilizados pela primeira vez para o rastreamento de movimentos do corpo humano na década de
1950 (SAUNDERS, INMAN e EBERHART, 1953). No entanto, estes sensores não estavam
comercialmente disponíveis até que, nos últimos anos, o seu desempenho foi drasticamente
melhorado. Como os sensores inerciais são compactos, leves e com um preço relativamente
Figura 3: Goniômetro mecânico - Régua e Transferidor. Extraído de (CARCI, 2016).

14
acessível eles têm sido uma escolha popular para aplicações na área da saúde, tais como
rastreamento de movimento, interface homem-máquina, animação gráfica e vídeo games.
O objetivo desse projeto é a concepção de um protótipo de rastreamento de movimento
dos membros superiores usando sensores inerciais, bem como a implementação de um software
para captura, tratamento e representação tridimensional em tempo real dos dados enviados pelos
sensores. Esse dispositivo permitirá ao pesquisador e ao profissional da área da saúde analisar a
biomecânica e a cinemática envolvida no movimento dos membros superiores. Como se trata de
um sistema compacto, o projeto pode ser estendido para aplicações onde o paciente possa se
movimentar com total liberdade e não haverá a necessidade do mesmo de estar localizado dentro
de uma clínica ou laboratório de pesquisa.
O projeto pode ser ainda dividido em objetivos parciais: integração dos sensores inerciais
e magnéticos, aquisição e tratamento dos sinais e dados de cada sensor, fusão dos dados dos
três sensores para estimar a melhor rotação em relação ao eixo referencial da terra utilizando o
conceito quaternions, exibição gráfica dos resultados e representação dos movimentos dos
membros superiores na plataforma de programação MATLAB.
Nós próximos tópicos desse relatório será feita uma revisão teórica embasada no
conceito de rotações, ângulos de Euler, o sistema numérico dos quaternions e quaternions
unitários, o avanço da tecnologia em sistemas microeletromecânicos, definição e classificação
dos sensores utilizados nesse projeto, sendo eles os sensores inerciais, giroscópio e
acelerômetro, e os sensores magnéticos, magnetômetros. A fusão desses três sensores em um
único circuito forma um módulo conhecido no mercado como unidades de medição inercial, ou
seja, é um conjunto de sensores que são capazes de sentir as forças inerciais descritas por
Newton e o campo magnético da terra. Como toda a parte de hardware do projeto é concebida
com a ajuda do microcontrolador Atmel SAM3X8E ARM Cortex-M3 CPU de 32 bits em uma placa
arduino, o protocolo de comunicação I2C também é revisado.
Posteriormente, é feita uma revisão do Estado-da-Arte sobre os sistemas de captura
inerciais. Esse tópico tem como objetivo ilustrar o cenário atual do mercado e das pesquisas
sobre os sensores inerciais, sensores magnéticos, unidades de medição inercial e suas diversas
aplicações, como por exemplo, sistemas de monitoramento e acompanhamento do movimento de
um corpo rígido, reabilitação e análise da biomecânica de uma pessoa. Por último, é discutido a
proposta do protótipo, experimentos de validação, resultados obtidos e discussão, permitindo a
conclusão do trabalho.

15
2 REVISÃO BIBLIOGRÁFICA
Para o desenvolvimento desse projeto se faz necessária uma revisão teórica embasada
em sistemas referenciais, ângulos de Euler, quaternions, MEMS, sensores inerciais,
magnetômetros, unidades de medição inercial e comunicação utilizando o protocolo I2C.
2.1 ÂNGULOS DE EULER
Considere um corpo rígido e seus três eixos principais, ê�, ê�, ê�, que são ortonormais.
Defini-se o sistema de coordenadas fixo ao corpo rígido, S*, com os eixos ��, ��, ��, ao longo
dos versores ê�, ê�, ê�, respectivamente. Quando o corpo rígido gira em torno de algum ponto
que permanece fixo no espaço, tomamos a origem do S*, como sendo esse ponto fixo. No caso
em que o corpo rígido não tem um ponto que fica fixo no espaço, tomamos a origem de S* no
centro de massa. Quando dois dos momentos de inércia principais do corpo rígido são iguais,
sempre tomamos seus respectivos eixos principais como sendo ê� e ê�, por convenção. Também
considere um sistema de coordenadas cartesianas, S, com eixos x, y e z, e seus três versores
respectivos, �̂, ̂�.̂ A origem de S, tomamos como sendo a mesma origem de S*, de forma que
S não é necessariamente fixo no espaço, já que o corpo rígido pode ter seu centro de massa em
movimento, o que implicaria em uma origem de S* móvel. No entanto as direções �̂, ̂�,̂ são
tomadas como fixas no espaço. Logo são necessários três ângulos para determinar a orientação
de S* com relação a S. Esses ângulos podem ser chamados de ângulos de Euler.
O primeiro ângulo de Euler que consiste de uma rotação dos eixos x, y e z em torno do
eixo z, de um ângulo de ϕ (do grego, fi). A transformação de coordenadas para essa primeira
rotação é descrita matricialmente como:
Onde
�ø = cos ϕ sin ϕ 0− sin ϕ cos ϕ 0
0 0 1 (2)
Sendo �� a matriz de rotação obtida quando os eixos z e z’ são coincidentes.
�′′�′ = ��
�� (1)

16
O segundo ângulo de Euler é chamado de θ (do grego, theta) e consiste de
uma rotação de eixos x’, y’ e z’ em torno do eixo x’, de um ângulo de θ. As novas
coordenadas, depois dessa segunda rotação de Euler, são dados por:
�����
���= ��
���
�� (3)
Onde
�� = 1 0 00 cos θ sin θ0 − sin θ cos θ
(4)
Note que a substituição da equação (1) na equação (3) resulta em:
�′′��
�′′= ���ø
�′′�′
(5)
Finalmente, o terceiro ângulo de Euler chamamos de ψ (do grego, psi), que consiste de
uma rotação dos eixos x’’, y’’ e z’’ em torno do eixo z’’, de um ângulo ψ. As novas coordenadas
denotados ��, ��, ��, são as coordenadas do sistema S* mencionado acima. Então:
������
= ���′′′′�′′
(6)
Onde
�� = cos ψ sin ψ 0− sin ψ cos ψ 0
0 0 1 (7)
Substituindo a equação (5) na equação (6) obtemos:
������
= �����ø�� (8)
Isto é: � = �����ø: ,
� = cos ψ cos ϕ − sin ψ cos θ sin ϕ cos ψ sin ϕ + sin ψ cos θ cos ϕ sin ψ sin θ
−sin ψ cos ϕ − cos ψ cos θ sin ϕ −sin ψ sin ϕ + cos ψ cos θ cos ϕ cos ψ sin θsin θ sin ϕ −sin θ cos ϕ cos θ
(9)
17
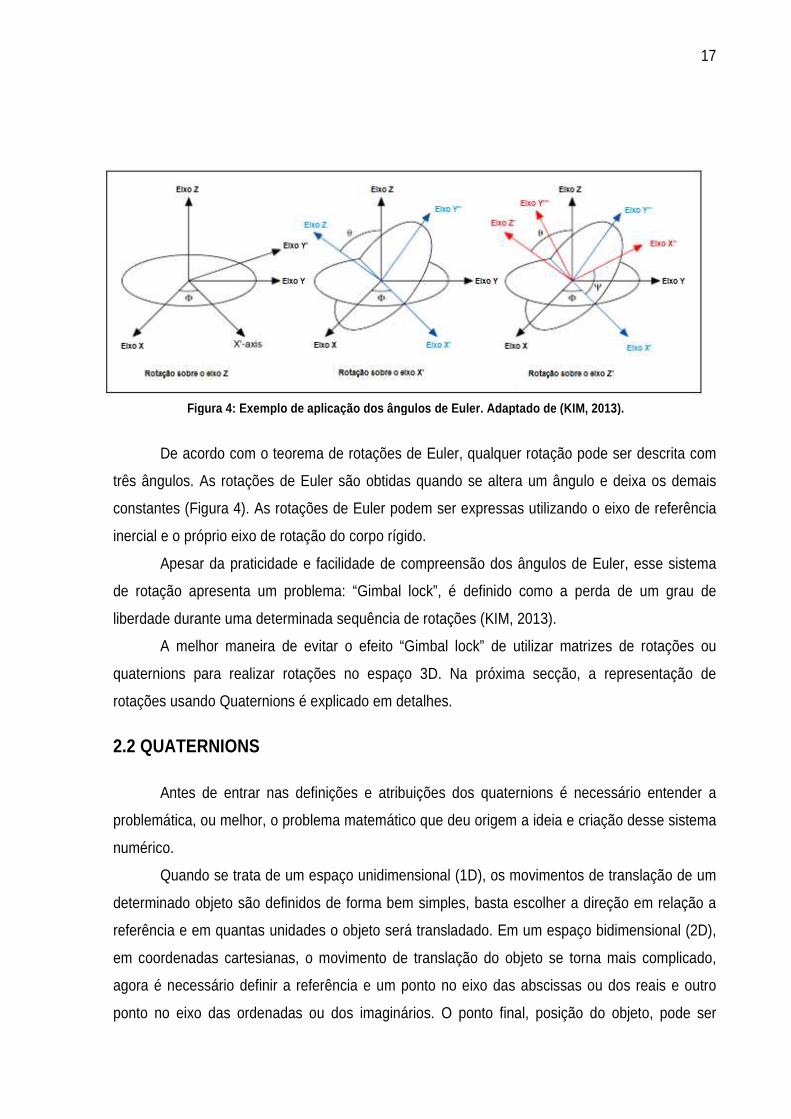
De acordo com o teorema de rotações de Euler, qualquer rotação pode ser descrita com
três ângulos. As rotações de Euler são obtidas quando se altera um ângulo e deixa os demais
constantes (Figura 4). As rotações de Euler podem ser expressas utilizando o eixo de referência
inercial e o próprio eixo de rotação do corpo rígido.
Apesar da praticidade e facilidade de compreensão dos ângulos de Euler, esse sistema
de rotação apresenta um problema: “Gimbal lock”, é definido como a perda de um grau de
liberdade durante uma determinada sequência de rotações (KIM, 2013).
A melhor maneira de evitar o efeito “Gimbal lock” de utilizar matrizes de rotações ou
quaternions para realizar rotações no espaço 3D. Na próxima secção, a representação de
rotações usando Quaternions é explicado em detalhes.
2.2 QUATERNIONS
Antes de entrar nas definições e atribuições dos quaternions é necessário entender a
problemática, ou melhor, o problema matemático que deu origem a ideia e criação desse sistema
numérico.
Quando se trata de um espaço unidimensional (1D), os movimentos de translação de um
determinado objeto são definidos de forma bem simples, basta escolher a direção em relação a
referência e em quantas unidades o objeto será transladado. Em um espaço bidimensional (2D),
em coordenadas cartesianas, o movimento de translação do objeto se torna mais complicado,
agora é necessário definir a referência e um ponto no eixo das abscissas ou dos reais e outro
ponto no eixo das ordenadas ou dos imaginários. O ponto final, posição do objeto, pode ser
Figura 4: Exemplo de aplicação dos ângulos de Euler. Adapta do de (KIM, 2013).

18
definido da forma p = a + bi onde ‘i’ representa a parte imaginária e p, agora representa um
número complexo.
Analisando de outra forma, é possível definir que a soma de números complexos
representa o movimento de translação em um espaço bidimensional. Por outro lado, a
multiplicação de números complexos, representa rotações em um espaço 2D, por exemplo, dado
um número complexo da forma p = a + bi, a multiplicação de p por i representa uma rotação de
90º no plano dimensional.
= !" + #$% ∗ $
= "$ + #$�
(10)
Como i é um número imaginário e satisfação a condição, i² = -1, então
= −# + "$ (11)
As rotações são representadas, de uma forma mais clara, quando se utiliza coordenadas
polares p = (r, θ), onde r é a distância entre o ponto e a origem e θ é o ângulo formado entre o
segmento de reta que une esse ponto à origem e o eixo x, também chamado ângulo azimutal. A
transformação ou conversão de coordenadas cartesianas para coordenadas polares é realizada
da seguinte forma:
' = ("� + #² (12)
* = tan-�!#"%
(13)
Sabendo disso, muitos matemáticos tentaram expandir essa aplicação dos números
complexos para o espaço tridimensional (3D), porém sem muito sucesso. Vetores produzem
vetores quando são somados, subtraídos, multiplicados por um número real e multiplicados entre
si, no caso do produto vetorial, mas não podem ser divididos. A preocupação com a ausência de
qualquer conceito de multiplicação de números complexos e quociente de vetores no espaço
tridimensional e o desejo de ampliar as aplicações com o uso de um sistema que possibilitasse
substituir os vetores em todas as suas aplicações, fez com que o matemático irlandês William
Rowan Hamilton (1805-1865) em 1853 desenvolvesse o conceito de números hipercomplexos no
espaço 4D que ele denominou de quaternions (HAMILTON, 2000).
Quaternions são formados por quatro números, ou seja, representa um vetor em um
espaço de quatro dimensões. Desses quatro componentes, um é número real (a) e os outros três
são puramente imaginários (b,c,d).
. = " + #$ + /0 + 12 (14)

19
Onde,
$� = 0� = 2� = $02 = −1 (15)
De uma forma bem simples, quaternions é um sistema numérico hipercomplexo que
permite a rotação e orientação de vetores em um espaço tridimensional, utilizando uma expansão
do conceito de números complexos.
Sendo = 3"4, #4, /4, 145, . = 3"6 , #6 , /6 , 165, ' = !"7 , #7 , /7 , 17%, três quaternions
pertencentes ao sistema numérico dos quaternions, temos as seguintes propriedades.
Tabela 1: Tabela de propriedades dos Quaternions – Adição. Propriedades Adição
Comutatividade + . = . + Associatividade ! + .% + ' = +!. + '%
Identidade 0 + . = + 0 = Soma + . =("4 + "6) + (#4 + #6)i + (/4 + /6)j + (14 + 16)k
Diferença − . = ("4 - "6) + (#4 - #6)i + (/4 - /6)j + (14 - 16)k
Tabela 2: Tabela de propriedades dos Quaternions - Produto. Onde, 8 = !9, :, ;%; ‘*’ representa produto escalar de vetores e ‘x’ repre senta produto vetorial.
Propriedades Multiplicação
Não - comutatividade . ≠ .
Associatividade ! .%' = !.'% Distributividade !. + '% = . + '/!. + '% = . + '
Identidade 1 = 1 = Inverso ..-� = .-�. Produto . = ["4"6 + ?4 ∗ ?6 , !"4?6 +"6?4 +?4�?6% Divisão /. = ..-�
Analisando as Tabela 1 e Tabela 2 pode-se que concluir que o conjunto numérico dos
quaternions herdam quase todas as propriedades do sistema dos números complexos. A única
propriedade que não se aplica aos quaternions é a comutatividade da multiplicação.
Posteriormente muitos físicos, matemáticos e engenheiros tentaram reescrever as leis da
Física utilizando os quaternions, que foram abandonados no século seguinte ao de sua criação e
desapareceram completamente até o primeiro quarto do século passado. Hoje os matemáticos
estão interessados em estudar sistemas de números em sua totalidade, em aprender suas
propriedades e construir novos sistemas que tornem possíveis aplicações até agora restritas ao
uso da Álgebra tensorial tradicional. O sistema dos quaternions é por enquanto, a única álgebra
de divisão associativa não comutativa sobre o corpo dos números reais.
20
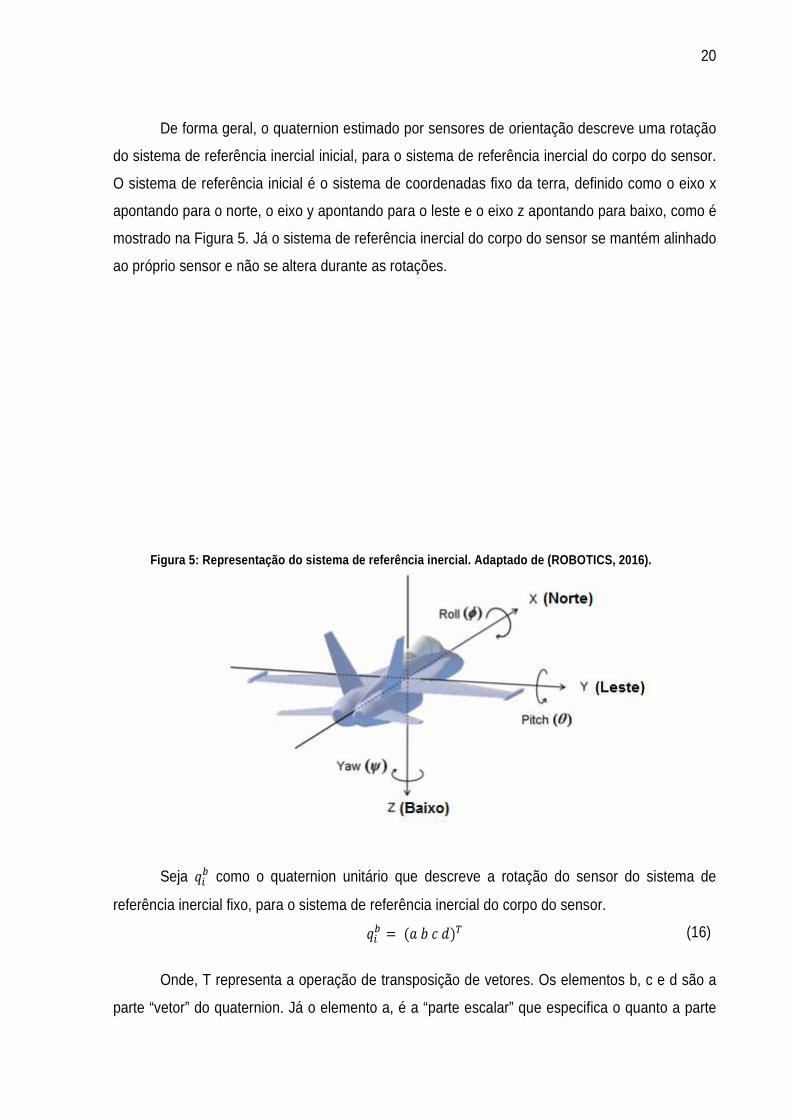
De forma geral, o quaternion estimado por sensores de orientação descreve uma rotação
do sistema de referência inercial inicial, para o sistema de referência inercial do corpo do sensor.
O sistema de referência inicial é o sistema de coordenadas fixo da terra, definido como o eixo x
apontando para o norte, o eixo y apontando para o leste e o eixo z apontando para baixo, como é
mostrado na Figura 5. Já o sistema de referência inercial do corpo do sensor se mantém alinhado
ao próprio sensor e não se altera durante as rotações.
Seja .@A como o quaternion unitário que descreve a rotação do sensor do sistema de
referência inercial fixo, para o sistema de referência inercial do corpo do sensor.
.@A = !"#/1%B (16)
Onde, T representa a operação de transposição de vetores. Os elementos b, c e d são a
parte “vetor” do quaternion. Já o elemento a, é a “parte escalar” que especifica o quanto a parte
Figura 5: Representação do sistema de referência inercial. Adaptado de (ROBOTICS, 2016).

21
vetor do quaternion deve ser rotacionado. Especificamente, se θ é o ângulo de rotação, e o vetor
(?C , ?D , ?E%B é um vetor unitário que representa o eixo de rotação, assim os elementos a, b, c e
d do quaternion são de definidos como:
(17)
O quaternion .@A pode ser usado para rotacionar qualquer vetor de três elementos usando
a seguinte operação matricial.
(18)
Isso é, o vetor v pode ser rotacionado considerando o mesmo como um quaternion onde
a parte real ‘a’ vale zero, e multiplicando v pelo quaternion .@A e o seu inverso. O inverso de um
quaternion é equivalente ao seu conjugado:
!.@A%-� = !", −#, −/, −1% (19)
Para entender melhor essa operação de rotação usando quaternions, deve se lembrar
que esse sistema númerico é composto por 4 elementos, ou seja, o quaternion rotaciona vetores
tridimensionais sobre a casca de uma esfera hipercomplexa que tem raio univalente. A
multiplicação do vetor tridimensional pela quaternion .@A rotaciona o vetor até metade do caminho,
e o quaternion invertido termina de realizar o movimento.
Definindo dois quaternions .� = !"�#�/�1�%B e .� = !"�#�/�1�%B, então o produto
.�.� é definido dado por:
(20)
Alternativamente, os quaternions podem ser usados para construir matrizes de rotações
3x3. Com essas matrizes é possível produzir rotação de um vetor no espaço tridimensional com
uma única operação de multiplicação de matrizes. A matriz de rotação a partir do eixo referencial
inicial para o eixo referencial do corpo rígido é definida como:

22
(21)
Então a rotação do eixo de referência inicial para o eixo de referência do corpo é definida
usando multiplicação de matrizes:
(22)
Através de um quaternion também é possível obter os ângulos de Euler e vice-versa. As
equações para a conversão são definidas como:
(23)
(24)
(25)
Uma rotação pura em um espaço tridimensional pode ser descrita por um quaternion
unitário. Quaternion unitário é um quaternion que tem a soma da raiz quadrada dos quadrados de
cada um de seus componentes igual a 1, ou seja, todos os quatro componentes do quaternion
são divididos pela magnitude do mesmo. Quaternion unitário é uma notação matemática simples,
capaz de descrever a orientação de corpos rígidos em um espaço tridimensional, considerando
que a rotação do objeto acontece em uma hipersfera com raio de valor unitário.
Rotações no espaço tridimensional podem ser descritas de diversas formas, tais como,
ângulos de Euler, matrizes de rotação e transformação, eixos e ângulos e quaternions. Cada um
desses sistemas apresenta suas vantagens e desvantagens. Para a concepção desse projeto, a
orientação de objetos e corpos rígidos no espaço será descrita no sistema numérico dos
quaternions. Em um primeiro momento pode ser difícil compreender o funcionamento dos
quaternions e suas operações já que se trata de um sistema de quatro dimensões, entretanto
esse sistema apresenta diversas vantagens em relação as matrizes de rotações e ângulos de
Euler.
• O processo de concatenar rotações é computacionalmente mais barato e
numericamente mais estável;
• Como o problema de Gimbal Lock está ligado a representação matricial dos
ângulos de Euler, esse problema não aparece na representação por quaternions;

23
• Ausência de ambiguidade;
• É possível extrair o eixo e o ângulo de rotação de um quaternion unitário;
• O processo de interpolação entre dois quaternions é mais direto.
Duas rotações puras sucessivas representadas por dois quaternions unitários, pode ser
atingida por uma única rotação em torno de um eixo escolhido adequadamente. O quaternion
unitário que representa essa operação de interpolação pode ser obtido através do produto de
quaternions descrito na Tabela 2.
Por meio de um estudo sobre a anatomia do corpo humano, corpos rígidos e rotações no
espaço, sabe-se que todo o movimento de qualquer segmento do corpo pode ser descrito através
da rotação do mesmo sobre um eixo fixo, por esta razão que o sistema numérico dos quaternions
foi utilizado neste trabalho. Para melhor ilustrar essa idéia, o próximo capitulo desse relatório
aborda uma revisão sobre corpos rígidos e cinemática direta.
2.3 CINEMÁTICA DIRETA
Cinemática é o ramo da física que se ocupa da descrição dos movimentos dos corpos
rígidos, sem se preocupar com a análise de suas causas, a dinâmica. Ou seja, cinemática é
estudo do movimento do corpo humano sem levar em consideração as forças que causaram o
mesmo. Essa análise envolve a descrição do movimento para determinar o quão rápido o corpo
se move, o quão longe ele viaja e a alteração da configuração de seus próprios segmentos e
juntas durante o movimento. Um exemplo é a observação do movimento das pernas, a sua
velocidade e aceleração durante a caminhada. Modelos biomecânicos do corpo humano são uma
das ferramentas mais utilizadas no rastreamento e análise de movimento do corpo humano.
Existem seis movimentos básicos, ou graus de liberdade, que ocorrem em diferentes
articulações do corpo humano (HAMILL e KNUTZEN, 2012). Para descrever esses movimentos,
define-se os ângulos articulares relativos entre dois segmentos. A descrição do movimento de
articulação é tipicamente expressa em relação a uma posição de partida, essa posição é referida
como sendo a posição inicial ou fundamental. Nessa posição o corpo humano está na vertical
com a cabeça virada para a frente, braços ao lado do tronco com as palmas das mãos viradas
em direção ao tronco e as pernas juntas com os pés apontando para a frente.
O primeiro conjunto dos seis movimentos básicos são flexão e extensão. Estes
movimentos ocorrem em muitas articulações do corpo, incluindo a cabeça, tronco, ombro, quadril
e joelho. Flexão é o movimento que diminui o ângulo relativo da junta entre dois segmentos

24
adjacentes. Extensão é um movimento de endireitamento que aumenta o ângulo relativo entre
dois segmentos adjacentes.
O segundo par de movimentos são abdução e adução. Estes movimentos não são tão
comuns como a flexão e extensão. Eles ocorrem nas articulações da escápula, ombro, punho e
quadril. Abdução é um movimento de afastamento da linha mediana do corpo. Levantar o braço
para a lateral do corpo é um exemplo de abdução. Adução, por outro lado, é o movimento de
retorno do segmento de volta para a linha mediana do corpo.
O terceiro e último par de movimentos básicos são a rotação interna e externa dos
segmentos do corpo humano. Eles ocorrem nas articulações da cabeça, tronco, ombro, quadril e
joelho. Rotação interna ocorre quando o segmento rotaciona em direção a linha mediana do
corpo, ao redor de um eixo vertical. Rotação externa é o movimento oposto para a frente que leva
o segmento para longe do corpo.
Além dos seis movimentos básicos descritos acima, existem alguns movimentos
especiais em diferentes partes do corpo. Um desses movimentos que pode é estudado nesse
projeto é a pronação e supinação. Eles ocorrem quando a extremidade distal do antebraço
rotaciona ao longo da articulação radioulnar. Supinação ocorre quando a palma da mão gira a
face para cima. Pronação é movimento inverso.
O corpo humano pode ser representado como um sistema de segmentos rígidos ligados
em sequência por articulações, representado por juntas. Um exemplo de uma cadeia cinemática
simples é o braço humano. O ombro, articulações do cotovelo e do punho estão ligados por dois
segmentos: a parte superior do braço e o antebraço.
Se uma determinada estrutura é formada por corpos rígidos e tem n graus de liberdade, a
mesma pode ser modelada como um conjunto de n juntas com 1 grau de liberdade conectadas
por n – 1 segmentos de tamanho zero.
2.4 MEMS - SISTEMAS MICROELETROMECÂNICOS
Desenvolvidos a partir dos anos 80, sistemas microeletromecânicos (ou simplesmente
MEMS – Micro ElectroMechanical Systems), podem ser utilizados, desde celulares a projetos
aeroespaciais, biotecnologia e medicina, essa classe de dispositivos causou uma revolução
eletrônica nas últimas décadas através da combinação da microeletrônica baseada em silício
com a tecnologia de microusinagem. A tecnologia MEMS é um processo de natureza
multidisciplinar, uma combinação de conceitos da microeletrônica, engenharia mecânica, ciência
dos materiais, física e química, reunidos para produzir sistemas integrados em um único chip,
25
gerando dispositivos capazes de desempenhar funções de sensoriamento, controle e atuação
(LIU, 2013).
Através do uso de técnicas de microfabricação, que nada mais são do que manipulações
do silício e outros substratos usando processos de microusinagem, é realizada a integração de
estruturas mecânicas, sendo elas móveis ou não, sensores, atuadores e eletrônica, tornando
possível a sintetização de sistemas completos em escala micrométrica. Basicamente, a
microeletrônica é o cérebro destes sistemas, responsável por toda a capacidade de
processamento, já a tecnologia MEMS acrescenta olhos, ouvidos e músculos a dispositivos antes
regidos, exclusivamente, pelas equações de Maxwell. Enquanto circuitos integrados tradicionais
são desenvolvidos explorando as propriedades elétricas do silício, MEMS também consideram
suas propriedades mecânicas
Um dispositivo MEMS é caracterizado, principalmente, pela presença de sensores ou
atuadores em conjunto com a microeletrônica, ou ainda, pela união de todos estes componentes
simultaneamente em um mesmo dispositivo.
Os microsensores são responsáveis por detectar as mudanças físicas do meio, sejam
elas mecânicas, térmicas, magnéticas, químicas ou eletromagnéticas, e convertê-las em um sinal
elétrico proporcional, ou seja, os microsensores se comportam como transdutores. A
microeletrônica, por sua vez, processa essa informação e aciona os microatuadores de forma que
eles possam criar uma resposta a esta mudança, convertendo sinais elétricos em energia
mecânica. Dependendo do mecanismo de sensibilidade e das grandezas observadas, estes
transdutores podem ser mecânicos, térmicos, magnéticos, químicos ou de radiação (LEE, 2011).
Dentre estes, talvez os mais conhecidos sejam os que exercem a função de sensores mecânicos,
como o acelerômetro (capaz perceber variações de aceleração), o giroscópio (permite medir a
velocidade de rotação e movimentos angulares), sensores de campo magnético ou
magnetómetro, que são capazes de sentir o movimento das linhas de campos magnéticos sejam
elas terrestres ou não.
2.5 SENSORES INERCIAIS
A inércia é uma propriedade física da matéria que foi estudada e formulada inicialmente
por Galileu e, posteriormente, provada por Newton. Esse princípio, que à primeira vista parece
ser óbvio, tornou-se a base para a tão conhecida 1ª Lei de Newton (HALLIDAY e RESNICK,
2012), e foi um dos responsáveis por provocar este cientista a desenvolver um ramo da
matemática específico para explicação de suas teorias: o cálculo diferencial e integral.

26
São chamados de sensores inerciais aqueles que têm por objetivo perceber os efeitos da
ação de forças que provoquem uma mudança do estado inercial de sistemas sobre os quais
estas forças são exercidas, sensores estes baseados na tecnologia MEMS.
Sensores inerciais são dispositivos MEMS capazes de monitorar variações de velocidade
e aceleração, linear ou angular, direta ou indiretamente, através da conversão de forças inerciais
em alguma mudança física conhecida que possa ser capturada por um transdutor correspondente
e convertida em um sinal elétrico. Este sinal elétrico é submetido a processos de filtragem linear e
não-linear a fim de se criar uma estimativa do sinal de entrada. A saída final representará um
valor calibrado da aceleração e velocidade angular.
Em um único circuito integrado encontramos estruturas mecânicas microusinadas
formando os transdutores mecânicos, responsáveis por realizar a tarefa de sensoriamento, e a
microeletrônica, competente o suficiente para nos fornecer sinais elétricos analógicos
correspondentes às forças as quais o sensor foi submetido. Em alguns chips, é possível
encontrar a tarefa mais facilitada, recorrendo a dispositivos que forneçam sinais já digitalizados,
filtrados digitalmente, processados, e até aos que armazenem leituras anteriores em memória,
tudo de forma autônoma, sem a interferência da CPU principal. O diagrama de funcionamento
desses sensores é ilustrado na Figura 6. Se o sensor fornecerá uma saída bruta, sem qualquer
tratamento, ou então uma saída processada, pronta para ser utilizada, dependerá das
características do dispositivo escolhido e claro, do valor investido.
Quando o ambiente ou sistema muda suas propriedades os transdutores mecânicos
transformam os fenômenos físicos aferidos em um sinal elétrico proporcional. Estes transdutores
estão sujeitos a interações com o encapsulamento do circuito integrado, normalmente causando
Figura 6: Visão sistêmica de um sensor inercial.

27
a transferência de calor e tensões mecânicas para o encapsulamento. A recíproca também é
verdadeira, de forma que estes fatores do ambiente podem ser transferidos para os transdutores
através do encapsulamento, mudando seu comportamento.
Posteriormente o sinal elétrico que vem dos transdutores entra em um estágio
amplificação, filtragem, processamento e digitalização do sinal. A eletrônica também deve gerar
sinais de controle necessários para configuração e ajuste do funcionamento do sensor. Na
prática, a fronteira entre a microeletrônica e os transdutores não é muito bem definida e,
frequentemente, estes dois formam um bloco indivisível, onde o estágio de entrada fornece a
polarização e excitação necessárias para o transdutor, ou partes da microeletrônica podem atuar
como componentes do transdutor.
A categoria de sensores inerciais baseados em MEMS é representada, principalmente por
dois dispositivos: acelerômetro e giroscópio. Já o magnetómetro é aplicado em IMUs para
melhorar a qualidade e a exatidão do sinal de saída dos sensores inerciais.
Acelerômetros: capazes de aferir a aceleração linear na direção de um eixo referencial.
Aceleração é a taxa de variação da velocidade no tempo, representada em m/s² (metro por
segundo ao quadrado) no Sistema Internacional de Unidades.
Giroscópios: capazes de medir a velocidade angular em torno de um eixo de referência.
A velocidade angular é uma grandeza que representa a taxa de variação da posição angular no
tempo, cuja unidade de medida no Sistema Internacional de Unidades é o rad/s (radianos por
segundo).
Magnetômetros: capazes de medir a intensidade, direção e sentido de campos
magnéticos em sua proximidade, cuja unidade no Sistema Internacional de Unidades é G
(Gauss). Apesar de não ser um sensor do tipo inercial, o magnetômetro é bastante utilizado em
sistemas de rastreamentos de movimentos em conjunto com o acelerômetro e giroscópio.
2.5.1 ACELERÔMETRO
Sensores de aceleração, mais conhecidos como acelerômetros, são sensores cujo sinal
de saída indica a aceleração em uma ou mais direções.

28
Basicamente, uma massa de prova de silício é suspensa e suportada por molas, também
de silício, conferindo a esta massa uma mobilidade conhecida. O acelerômetro, por estar fixado
ao sistema a ser medido, sofrerá a ação das mesmas forças impostas a este sistema. Uma
variação de velocidade provocará, pelo princípio da inércia, uma alteração entre a distância dos
eletrodos fixos e dos eletrodos móveis ligados à massa de prova. Em repouso, as capacitâncias
C1 e C2 são iguais. Sob efeito da aceleração, C1 e C2 variarão dependendo do sentido e
intensidade das forças que provoquem essa mudança de estado inercial (Figura 7). Daí em
diante, a microeletrônica assume a tarefa de tratar os sinais elétricos provenientes destas
variações de capacitância (MAENAKA, 2008).
Em aplicações que requerem maior resolução e estabilidade, como detecção de
terremotos, sistemas de navegação inercial e obtenção de perfis de reflexão sísmica, o mais
indicado é o uso de acelerômetros baseados em estruturas vibrantes (MAENAKA, 2007).
Figura 7: Estrutura de um acelerômetro de dois eixos. Adapt ado de (TORRES, 2016).

29
2.5.2 GIROSCÓPIO
Os giroscópios são mecanismos que se baseiam no princípio da conservação de
momento angular e são capazes de medir a orientação de um objeto.
Estruturalmente, um giroscópio é similar a um acelerômetro, possuindo, também, uma
massa de prova suportada por molas de silício. A principal diferença é que a velocidade angular é
obtida medindo-se a força Coriolis exercida na massa vibrante, ou seja, o movimento do corpo de
prova deve possuir, pelo menos, dois graus de liberdade (ACAR e SHKEL, 2009).
A versão clássica de um giroscópio consiste em um disco (rotor) montado em uma
estrutura que provê 3 graus rotacionais de liberdade. Ao ser girado, o disco tende a continuar em
rotação na mesma orientação, devido à conservação de momento angular. Assim, como o
mecanismo é feito de modo a minimizar o atrito nas juntas dos arcos, quando a estrutura é
girada, o disco continua na mesma orientação, girando quase independentemente do resto da
estrutura. Deste modo é possível medir o ângulo entre o eixo de rotação do disco e os arcos mais
externos e determinar quanto a estrutura girou em relação a sua orientação original. Os arcos de
suspensão são chamados gimbais1.
Os giroscópios MEMS, por sua vez, podem ser construídos de diversas maneiras. Uma
das mais simples e baratas é a que utiliza microestruturas vibrantes (Figura 8). Ao invés de um
disco girante, este tipo de giroscópio usa uma massa de prova que oscila apenas em uma
direção. Há dois conjuntos de molas de silício: Kx, suportando a estrutura externa e conferindo
mobilidade na direção do eixo x; e Ky permitindo uma constante vibração da parte interna na
1 Na maioria dos softwares 3D, utiliza-se um sistema de coordenadas e eixos geralmente baseadas nos chamados ângulos de
Euler (X, Y e Z). O efeito Gimbal Lock acontece quando dois desses eixos estão apontando para o mesmo lugar, ou seja, estão alinhados, dessa forma o giroscópio perde um eixo de rotação.
Figura 8: Estrutura de um giroscópio de um eixo. Adaptado de (TORRES, 2016).
30
direção do eixo y, causada por atuadores eletrostáticos. A força Coriolis proveniente de uma
rotação em torno do eixo z faz com que tanto a parte central quanto a parte externa da estrutura
se movam na direção x.
Este movimento da parte externa causa uma variação da capacitância entre eletrodos
fixos e móveis conectados a esta parte da estrutura, essa variação da capacitância é processada,
filtrada e digitalizada, produzindo o sinal de saída do giroscópio.
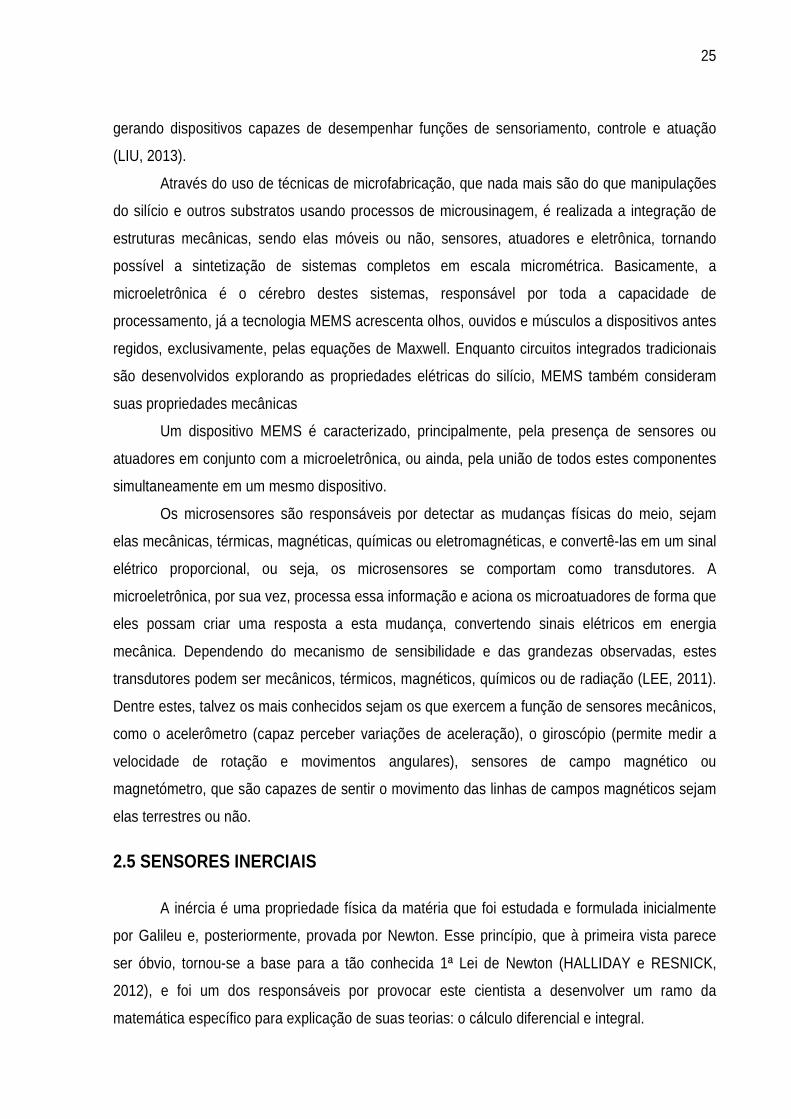
2.6 SENSORES MAGNÉTICOS - MAGNETÔMETRO
Magnetômetros são dispositivos empregados na medição da intensidade, direção e
sentido de campos magnéticos. Magnetômetros são amplamente utilizados para medir o campo
magnético da terra. Há dois tipos de magnetômetros: escalares e vetoriais; enquanto que os
magnetômetros escalares medem apenas a magnitude do campo magnético, os vetoriais são
capazes de medir a magnitude e sentido do campo magnético na direção em que estão
alinhados.
Os Magnetômetros podem ter diversos princípios de funcionamento, como por exemplo
os magnetômetros de Efeito Hall, de bobina rotativa e de precessão protônica (RIPKA, 2001). O
efeito Hall foi descoberto em 1879 por E. H. Hall. Aplicando um campo magnético perpendicular à
direção da corrente elétrica em um semicondutor elétrico induz uma diferença de potencial
elétrico nas laterais do condutor conforme ilustra a Figura 9.
Figura 9: Configuração original do efeito hall.

31
De um modo geral, um magnetômetro é formado por um conjunto de equipamentos
usados para medir o momento magnético de uma amostra para um determinado valor de campo
magnético aplicado.
Os componentes básicos de um magnetómetro são:
� Fonte de Corrente.
� Eletroímã.
� Sensor de Campo Magnético
� Sistema para movimentação da amostra
O funcionamento básico de um magnetômetro pode ser descrito da seguinte forma: a
fonte fornece corrente elétrica para as bobinas do eletroímã que geram um campo magnético na
região onde se encontra a amostra. A amostra é magnetizada e por sua vez produz um campo
induzido que é lido pelo sensor. Através deste campo induzido e de um modelo teórico, obtemos
o momento magnético da amostra para cada valor de campo aplicado.
Os sensores magnéticos possuem uma sensibilidade de acordo com alguns parâmetros.
Os mais importantes são, eletrônica para a leitura dos diferentes campos magnéticos e
geometria. Existem vários tipos de magnetômetros que são bem diferentes entre si nos aspectos
de construção e custo. Portanto, na hora da compra do sensor, deve-se levar em consideração, a
aplicação, resolução desejada e o tamanho físico.
Magnetômetros usualmente são aplicados em Unidades de Medição Inercial, porém
esses sensores não classificados como sensores inerciais, já que estes não fazem medições
inerciais e sim, são capazes de sentir o campo magnético terrestre e de outros equipamentos.
2.7 UNIDADES DE MEDIÇÃO INERCIAL E MAGNÉTICA
Unidades de Medição Inercial (do inglês, Inertial Measurement Unit – IMU) são
dispositivos eletrônicos que empregam acelerômetros, giroscópios e, eventualmente,
magnetômetros para medir aceleração, velocidade, orientação, campo magnético e posição do
sensor. Uma IMU tem diversas áreas de aplicação, desde simples dispositivos de equilíbrio para
veículos automatizados, sistemas complexos de navegação estimada (dead reckoning)
(SABATINI, 2009), e sistemas de captura de movimento do corpo humano, que é o objetivo
desse trabalho.
Por sua vez, Sistemas de Navegação Inercial (Inertial Navigation System – INS: sistemas
de estimativa de posição baseada na posição anterior, velocidade e tempo decorrido desde a

32
posição anterior) também utilizam IMUs, porém requerem outros dispositivos para auxiliar as
estimativas e corrigir os desvios inerentes a IMUs, como GPS, barômetro e sensores de
velocidade externos. A necessidade da correção das medidas e sinais de uma IMU por
equipamentos externos se origina do acúmulo de erros inerente a estes tipos de sistema. Os
erros, por sua vez, são oriundos da impossibilidade de se adquirir os dados dos sensores
continuamente, isto é, de se fazer a leitura do sensor em intervalos de tempo muito pequenos, ou
seja, de forma geral, quanto maior for a taxa de amostragem do sensor, melhor é a noção de
‘tempo real’ que o dispositivo irá transmitir ao usuário.
Os valores perdidos entre uma amostra e outra dos sensores são fonte dos erros
acumulativos de uma IMU. Se fosse possível criar um sistema com taxa de amostragem infinita, o
uso de sensores externos a IMU não seria necessária.
Numa IMU, o papel do acelerômetro é prover a característica do movimento a longo
prazo, contínuo. Acelerômetros apresentam alta taxa de ruído e, além disso, não são capazes de
medir, exclusivamente, as componentes lineares da aceleração sendo aplicada ao sistema,
medindo também as componentes angulares da aceleração, ou seja, ao se rotacionar um
acelerômetro ao redor do seu centro de massa, ele registrará aceleração, apesar de não estar
sendo submetido a aceleração linear. No entanto, os valores de aceleração do sensor não sofrem
de erros cumulativos.
O papel do giroscópio é prover a característica do movimento a curto prazo, ou
movimentos rápidos. Giroscópios são muito menos suscetíveis a ruídos que os acelerômetros, e
apresentam a resposta mais rápida e tem maior estabilidade. No entanto, como as leituras de um
giroscópio fornecem a velocidade angular, é necessário fazer a integração dessas medidas para
se obter o ângulo de rotação do sistema o que introduz erros cumulativos de integração. Assim, a
longo prazo, a estimativa baseada puramente em giroscópios deriva do valor real. A deriva ou
erro em relação ao valor real é conhecido como drift, que é uma característica inerente aos
sensores. De forma geral, quanto melhor forem os componentes, a montagem e a confecção do
sensor, menor é drift do mesmo, entretanto isso implica em um aumento exponencial do preço
total do dispositivo.
Integrando estes dois sensores em uma IMU, os problemas de cada sensor são
compensados um pelo outro. O giroscópio reduz a sensibilidade do acelerômetro a acelerações
não lineares, enquanto que o acelerômetro corrige a deriva do giroscópio, usando o vetor da
força gravitacional para determinar a direção vertical correta, diminuindo o erro de posição
angular do sistema.

33
A inserção de magnetômetros corrige a deriva da posição angular, da fusão sensorial
entre o acelerômetro e giroscópio, ao redor do eixo da força gravitacional. O acelerômetro não é
capaz de corrigir a deriva em rotações ao redor deste eixo, pois o vetor aceleração observado por
um objeto é invariante a rotações sobre eixo de gravidade. Por exemplo, um veículo trafegando
em uma esfera perfeita sempre observará o vetor da aceleração gravitacional apontando para
dentro da esfera, paralelamente ao seu próprio eixo vertical. O magnetômetro inclui a direção do
norte magnético da terra como elemento de correção no sistema.
Para realizar a fusão do acelerômetro, giroscópio e magnetômetro se faz necessário o
desenvolvimento de algoritmos que sejam capazes de captar os sinais dos três sensores nos
eixos x, y e z, e produzir na saída um sinal ou medida otimizada. A saída gerada depende da
necessidade do desenvolvedor do algoritmo ou do usuário. Os algoritmos mais citados na
literatura, como por exemplo os filtros de Kalman e o algoritmo de Mahonny e Madgwick, dão
como resultado, da fusão sensorial, os quaternions ou matrizes de rotações.
O filtro de Kalman se caracteriza como uma ferramenta estatística eficiente de estimação,
pois minimiza o erro quadrático, nesse caso, o filtro tem como objetivo diminuir o drift inerente
dos sensores inerciais.
A aplicação do filtro de Kalman é feita quando o modelo está descrito na forma espaço-
estado, mais especificamente quando é possível observar uma variável, chamada de variável
sinal ou de observação, e através dela obter uma estimativa eficiente para outra variável, a
variável estado. A estimativa da variável de estado pode ser feita para o passado da série de
observação, para o presente e até mesmo para o futuro (GREWAL e ANDREWS, 2014).
2.8 PROTOCOLO DE COMUNICAÇÃO I2C
Para este projeto a comunicação entre o microcontrolador, placa arduino DUE, e as
unidades de medição inercial (IMU) se dará pelo protocolo de comunicação I2C
I2C é a sigla de Inter-Integrated Circuit, e basicamente é um protocolo de comunicação
entre dispositivos que “falam” I2C.
O protocolo I2C descreve o funcionamento de um barramento de comunicação serial que
utiliza apenas dois fios, inventado pela Philips no início da década de 90, este protocolo é muito
utilizado para conectar periféricos de baixa velocidade a placas-mãe, microcontroladores e afins.
34
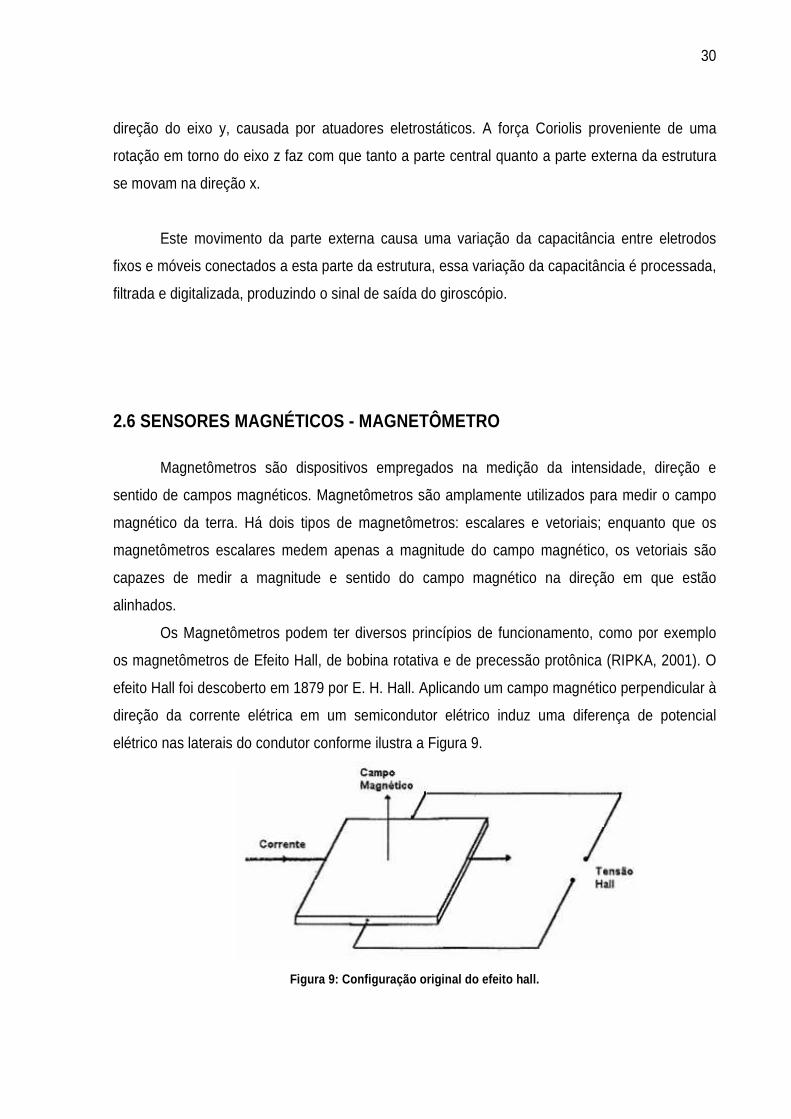
Como é possível a comunicação de um ou mais dispositivos usando apenas dois fios?
Para isso, cada periférico deve apresentam uma ID (número de identificação) predefinido, ou o
endereço de um dispositivo exclusivo, dessa forma o mestre da comunicação pode escolher com
que estará se comunicando.
Os dois fios são chamados de Serial Clock (SCL) e Serial Data (SDA). A linha SCL é o
sinal de relógio, responsável por sincronizar a transferência de dados entre os dispositivos
conectados ao barramento I2C, o sinal SCL é gerado pelo mestre. A outra linha, SDA é
responsável pelo transporte de dados (Figura 10).
O protocolo de comunicação I2C funciona da seguinte forma, o sinal com os dados é
transferido em uma sequência de 8 bits. Dessa forma, após a chegada de uma condição de
início, vem uma sequência de 8 bits que indica o endereço do dispositivo escravo para qual os
dados estão sendo enviados. Depois do endereço do escravo, vem 1 bit, chamado de
Acknowledge. Os próximos 8 bits indicam, na maioria dos casos, uma sequência de
endereçamento interna do dispositivo escravo. Posteriormente, os próximos bytes (sequência de
8 bits) representam os dados que são estão sendo transferidos, até a chegada da condição de
parada (Stop bit). A Figura 11 representa o diagrama de blocos básico da comunicação I2C.
Figura 10: Diagrama básico de conexão do barramento I2C. Ada ptado de (RODRIGUES, 2014).

35
3 RASTREAMENTO INERCIAL – ESTADO DA ARTE
O rastreamento e captura em tempo real do movimento do corpo humano tem diversas
aplicações tanto na engenharia quanto na medicina, tais como análise da marcha humana,
reabilitação, análise do movimento articular e outros. Várias tecnologias de rastreamento, como o
rastreamento mecânico utilizando goniômetros, estruturas eletromecânicas (GYPSY, 2016),
rastreamento magnético (LIBERTY, 2016) e rastreamento visual (VICON, 2016) (QUALISYS,
2016) (OPTITRACK, 2016) tem sido usadas e aprimoradas por muitos anos. No entanto essas
tecnologias, muitas vezes, demandam uma infraestrutura complexa, o que pode comprometer a
sua usabilidade em algumas aplicações, como por exemplo, a sua utilização em ambientes
externos e no dia-a-dia comum de uma pessoa. Sistemas de rastreamento inercial (XSENS,
2016) funcionam de uma forma mais natural e simples para rastrear o movimento do corpo
humano na vida diária. Além disso, o desenvolvimento da tecnologia dos sensores e dispositivos
MEMS possibilitou a criação de sistemas para rastreamento inercial sem fio, mais conhecidos
como sistemas wireless (wearable sensors). Dessa forma esses sistemas passaram a ser bem
mais aceitos, devido ao seu tamanho pequeno, portabilidade, instalação simples, baixo consumo
Figura 11: Instruções básicas para escrita e leitura usando I2C. Adaptado de (RODRIGUES, 2014).
36
de energia, custo e principalmente a possibilidade de monitorar, com exatidão, os movimentos do
corpo humano.
Um desafio nas pesquisas atuais de rastreamento de movimento com sistemas inerciais é
a sua relação com a eficiência computacional e a reconstrução de modelos do movimento do
corpo humano. Cálculos de alta complexidade, como os que são utilizados na reconstrução de
modelos do corpo humano requerem uma grande quantidade de tempo e capacidade de
processamento do computador (CPU) o que pode afetar a eficiência do sistema para aplicações
de rastreamento em tempo real. Rotações de estruturas angulares, como é o exemplo das juntas
e articulações do corpo são descritas por matrizes de rotações sendo que é necessária uma
matriz para cada eixo de rotação. Ao conectar vários segmentos do corpo humano ao sistema,
maior é o número de matrizes necessárias para descrever as possibilidades de movimento do
sistema, o que leva a um aumento do tempo de processamento da CPU para realizar todos os
cálculos necessários, para casos em que o sistema se torne muito complexo ou o número de
graus de liberdade seja muito alto, a noção de tempo real pode ser perdida.
Semelhante a função das matrizes de rotações, a representação por ângulos e eixos –
twist (SOMMER e ROSENHAHN, 2014) e mapas exponenciais (GRASSIA, 1998) são técnicas
capazes de descrever rotações das articulações, juntas e conectar corpos rígidos. Essas técnicas
são bastante exploradas em aplicações robóticas e rastreamento sem o uso de marcadores. A
vantagem dessas técnicas é que elas reduzem a complexidade dos cálculos representando cada
articulação com apenas uma matriz. Entretanto, essas técnicas não têm sido estudadas para
aplicações em sistemas inerciais até o presente momento, sendo que suas vantagens são
necessárias para aplicações em rastreamento de movimento em tempo real.
Para o rastreamento em tempo real do corpo humano os sensores inerciais são
acoplados aos membros do corpo. No entanto, estimar o melhor posicionamento do sensor sobre
o membro é um desafio. Definir o melhor posicionamento do sensor está ligado diretamente as
características anatômicas do corpo humano, deve-se levar em consideração o tecido mole e as
articulações, já que cada movimento pode induzir ruídos de artefato e criar interferências no sinal
dos sensores inerciais. Além disso a escolha da posição do sensor impacta diretamente sobre o
algoritmo de rastreamento e no cálculo da cinemática direta. Ambos os problemas são desafios
atuais para os pesquisadores. Encontrar a melhor forma de estimar com exatidão a posição do
sensor poderia reduzir a presença de ruídos no sinal dos sensores inerciais, principalmente os
ruídos de artefato, e também os erros de cálculo e rastreamento (LIN e KULIć, 2012).
37
Como foi discutido anteriormente, a maioria dos sistemas de rastreamento disponíveis no
mercado podem capturar os movimentos do corpo humano em um local delimitado pela
infraestrutura do próprio sistema. Para determinar o posicionamento e rastrear os movimentos de
uma pessoa em um ambiente externo podem ser aplicados outros tipos de tecnologia, como por
exemplo o Sistema de Posicionamento Global (GPS), porém esse sistema fornece apenas
informações sobre a posição exata de uma pessoa ou objeto, a resposta do GPS não é muito
confiável para ambientes fechados, por conseguinte o uso de sistemas com unidades de medição
inerciais e magnetômetros apresentam mais essa vantagem, a possibilidade de rastreamento dos
movimentos do corpo humano e também da posição do indivíduo no espaço em diferentes
ambientes, já que esses sistemas não demandam de uma infraestrutura grande para a aquisição
e tratamento dos sinais.
A maioria dos estudos que utilizam os sensores inerciais combinam acelerômetros e
giroscópios com sistemas wireless que se assemelham com roupas onde, cada membro contêm
pelo o menos um sensor inercial. Tradicionalmente, a orientação do corpo tem sido estimada
através da integração da velocidade angular medida pelo giroscópio, a partir de uma orientação
inicial conhecida. Do mesmo modo, a posição pode ser obtida pelo processo dupla integração da
aceleração mensurada pelo acelerômetro. Entretanto, existe um problema significativo com a
integração dos sinais dos sensores inerciais. O processo de integração é definido como a soma
cumulativa de um sinal durante um determinado período de tempo, como o acelerômetro é muito
sensível a qualquer tipo de força de aceleração ou perturbação e o giroscópio tem um drift interno
ao sistema e suas microestruturas qualquer erro, por menor que seja, introduz no sinal de saída
um erro cumulativo em relação as medidas reais que com o passar do tempo degrada
completamente o sistema de rastreamento. Roetenberg demonstrou que a integração do sinal do
giroscópio com o mínimo de ruído resulta em erro de medida de 10 a 25º em relação ao valor real
após um minuto de coleta (ROETENBERG DANIEL, 2006). Já a dupla integração do
acelerômetro com o mínimo de ruído resulta em um erro no cálculo da posição que cresce de
forma cúbica no tempo (FOXLIN, 2005).
Willemsen et al, desenvolveram uma técnica para medir o ângulo de flexão e extensão de
articulações do corpo humano. O sistema foi capaz de calcular o ângulo do joelho diretamente
usando oito acelerômetros uniaxiais ligados diretamente na coxa e na perna do indivíduo, sem o
processo de dupla integração (WILLEMSEN, ALSTE e BOOM., 1990). Os membros inferiores
foram moldados como um pendulo duplo onde o joelho representava um ponto de junção articular
permitindo rotação planar. O sistema foi preciso apenas durante movimentos lentos

38
(WILLEMSEN, FRIGO e BOOM, 1991). Posteriormente Williamson e al, usaram duas unidades
de sensores inerciais com giroscópios e acelerômetros, ligados a coxa e ao tornozelo para medir
a flexão e extensão do joelho através do cálculo da diferença do angulo de inclinação entre os
dois sensores (ANDREWS, 2001).
Para corrigir o drift inerente ao processo de integração do giroscópio durante o processo
de rastreamento de movimentos da cabeça, Foxlin, usou medidas ocasionais de um goniômetro
para detecção da inclinação e um filtro complementar de Kalman (FOXLIN, 1996). Um filtro
complementar de Kalman opera sobre os erros de orientação estimados pela integração do sinal
do giroscópio e os ângulos de inclinação obtidos a partir de outros sensores. Os sinais de erro de
cada sensor permitem que o filtro de Kalman possa estimar os próximos erros na orientação e
retira-los do sinal. Está técnica tem o inconveniente de que quaisquer acelerações da cabeça
corrompe a performance do sensor de inclinação, e o filtro de Kalman incorpora os dados
corrompidos na determinação da orientação, levando a um erro da orientação em relação ao
valor real. Para contornar esse problema, em um artigo posterior (FOXLIN e ALTSHULER, 1998),
a correção do drift foi aplicada apenas durante períodos estacionários, quando foi assumido que
o acelerômetro era capaz de medir apenas a aceleração da gravidade.
Luinge et al, mostraram que a orientação obtida a partir da integração da velocidade de
rotação do giroscópio pode ser melhorada por meio da fusão da informação de inclinação obtida
a partir do vetor gravidade dos acelerômetros (LUINGE, 2002) (LUINGE, H. e M., 1999). Em seu
sistema, a orientação obtida pelo processo de integração da velocidade angular foi dividida em
inclinação e orientação em torno do eixo vertical. A aceleração da gravidade foi usada para
calcular a inclinação durante os períodos estacionários. A diferença entre a inclinação do
acelerômetro e do giroscópio foi utilizada como entrada para o filtro de Kalman para se obter o
angulo de inclinação mais preciso. As estimativas foram então combinadas com a rotação em
torno do eixo vertical para produzir os ângulos de orientação mais próximos dos valores reais. No
entanto, os resultados mostraram que as estimativas foram precisas somente por períodos curtos
de tempo quando o indivíduo não estava se movendo e os acelerômetros estavam sujeitos
apenas a aceleração da gravidade.
Em um sistema de medição inercial sem giroscópio, Giansanti et al, usaram vários
acelerômetros para determinar a orientação e posição dos membros inferiores (GIANSANTI,
MACELLARI e MACCIONI, 2003). Eles mostraram que o erro de orientação era de dez graus
para um intervalo de observação bem curto, cerca de um a dois segundos. Em um segundo
estudo, eles combinaram giroscópios e acelerômetros para rastrear a posição e orientação

39
durante um protocolo de três tarefas prescritas: sentar, levantar e início de marcha (GIANSANTI,
MACCIONI e MACELLARI, 2005). Os erros de estimação da orientação foram mínimos, no
entanto eles restringiram a aplicação para tarefas simples e limitaram a avaliação de
desempenho do sistema para períodos de tempo de curta duração, quatro segundos.
Bachmann et al, usaram acelerômetros e magnetômetros em um filtro complementar
baseado em quaternions para compensar o drift de orientação advindo do processo de integração
da velocidade angular (BACHMANN e MCGHEE, 2001). O sistema era composto de um
acelerômetro triaxial, giroscópio triaxial e magnetômetro triaxial, montados juntos em um único
módulo para produzir um sensor de referência magnética, ou, sensor de Velocidade Angular e
Gravidade (MARG). Em um estudo posterior, Bachmann et al, investigaram o efeito de
equipamentos eletrodomésticos e móveis feitos de materiais ferromagnéticos na exatidão da
detecção da orientação de um sistema MARG (BACHMANN, YUN e PETERSON, 2004). Eles
observaram erros que variavam de 12 a 16º em relação ao valor real de orientação, e afirmaram
que esses erros podem ser evitados se o indivíduo mantiver um distancia de pelo o menos 1
metro da fonte de perturbação eletromagnética. Isso limita a aplicabilidade de rastreamento do
sistema a um ambiente de laboratório personalizado.
Roetenberg et al, argumentaram que os erros devido à perturbação do campo magnético
poderiam ser compensados por um algoritmo adequado de fusão sensorial (ROETENBERG
DANIEL, 2005). Eles desenvolveram um filtro de Kalman que operava com duas entradas para
estimar a orientação do corpo humano. A primeira entrada é a diferença entre a inclinação
medida através do vetor gravidade do acelerômetro e a inclinação do giroscópio. A segunda
entrada é a diferença entre a inclinação calculada pelo magnetômetro e a inclinação do
giroscópio. Eles incluíram também no modelo do filtro, o erro de bias do giroscópio, perturbações
magnéticas e possíveis erros de orientação. O sistema foi testado sob condições estáticas e
dinâmicas com materiais ferromagnéticos próximos ao sensor. Os resultados mostraram que a
estimativa de orientação melhorou significativamente quando foi utilizado a correção de
interferência eletromagnética. Porém, os autores reportaram que o sistema de rastreamento foi
testado sobre condições limitadas e controladas, e que a estimativa de orientação estaria sujeita
a erros com movimentos mais rápidos e complexos. Em um outro estudo, Roetenberg et al,
combinaram um sistema magnético, montado sobre o corpo, com acelerômetros e giroscópios
para rastrear a posição e orientação do indivíduo usando um filtro complementar de Kalman
(ROETENBERG DANIEL, 2009). A orientação e posição foram obtidos a partir de um processo
de simples integração do giroscópio e dupla integração do acelerômetro, os resultados foram

40
atualizados usando um magnetômetro, para melhorar a acurácia do sistema. Todo o sistema foi
testado sem metais e aparelhos eletromagnéticos nas proximidades, porém era esperado que os
erros calculados pudessem aumentar se materiais ferromagnéticos fossem colocados próximos
aos sensores.
Em uma série de estudos, Zhou et al, utilizaram dois sensores, com giroscópios e
acelerômetros, adaptados em uma roupa, para rastrear o movimento dos membros superiores do
corpo humano em um sistema de reabilitação (ZHOU, STONE, et al., 2008). Eles usaram a
notação de ângulos de Euler e conceitos de cinemática direta para localizar o punho e o cotovelo.
Três indivíduos foram convidados para testar o sistema, foram realizadas um conjunto de tarefas
onde o ombro do indivíduo deveria se manter na mesma posição durante todo o procedimento.
As tarefas foram atingir um alvo com a mão, levantar um objeto até a altura da cabeça e flexão do
cotovelo. Cada procedimento durou até vinte segundos. Os resultados mostraram grande
exatidão na estimativa de orientação e posição, quando comparados com um sistema de
rastreamento ótico como referência (ZHOU e HU, 2007) (ZHOU e HU, 2010).
Donghoon et al, implementaram um sistema inercial de captura de movimentos do corpo
humano, usando acelerômetros, magnetômetros e giroscópios. Acoplados em dispositivos
wireless, os sensores inerciais e magnéticos foram montados sobre cada segmento do corpo
humano para determinar, de forma independente, a orientação absoluta (KANG, JUNG, et al.,
2011). Para simular o corpo humano e a cinemática de movimento, foi construído um modelo
geométrico do tipo stick (Tree Model). Os resultados obtidos foram promissores, demostrando a
viabilidade e validade de sistemas de rastreamento usando IMUs, mesmo durante movimentos
mais agressivos, como a simulação de uma tacada de golf, dançar ou correr.
Nora et al, desenvolveram um algoritmo baseado em filtros polinomiais, interpolação e
transformadas usando wavelets, para diminuir e anular o efeito de drift do acelerômetro durante o
processo de cálculo da posição em movimentos periódicos (MILLOR, LECUMBERRI e GÓMEZ,
2013). O protocolo do estudo era bem simples, mais conhecido como o teste da cadeira, onde o
indivíduo deveria sentar e depois levantar em intervalos contínuos. Para a validação do sistema,
composto de um acelerômetro, giroscópio e magnetômetro, e do algoritmo proposto, foi usado
como referência um outro sistema de captura visual da VICON (VICON NEXUS 1.0). Os
resultados obtidos indicaram erros menores do que 1% e um coeficiente de correlação maior que
0.9. A relevância desse estudo é que depois de cancelar o drift no cálculo da posição, é possível
determinar a posição no eixo Z para movimentos cíclicos.

41
O sucesso dos sistemas e algoritmos de rastreamento inercial é limitado por vários
fatores. Uma abordagem típica na maioria dos estudos citados acima envolve a integração da
velocidade angular do giroscópio para obter os ângulos de orientação e a aplicação do filtro de
Kalman no acelerômetro para corrigir o erro cumulativo que tem origem no processo de dupla
integração para obter a posição do sensor. Nestes estudos, as estimativas de orientação são
confiáveis por breves períodos de tempo, quando a aceleração resultante é apenas a aceleração
da gravidade, dessa forma os acelerômetros foram utilizados apenas como sensores de
inclinação. Outros estudos utilizaram o magnetômetro como sensor de inclinação apenas para
determinar o ângulo de rotação do eixo vertical. Porém, o uso desses sensores MARG estão
sujeitos a perturbações magnéticas, o que pode comprometer a usabilidade do sistema.
O uso do filtro linear de Kalman em processos dinâmicos altamente não lineares introduz
mais erros no cálculo da orientação do sistema. Em alguns algoritmos, os pesquisadores usam o
filtro de Kalman estendido (EKF) para linearizar o processo e os sinais do modelo.
O EKF é baseado na linearização do estado de transição e da matriz de observação com
uma expansão de Taylor de primeira ordem (GREWAL e ANDREWS, 2014). Ele modela as
variáveis de estado com momentos de primeira e segunda ordem, que é o mais apropriado
quando a distribuição do processo é do tipo gaussiana. O processo de linearização leva ao mau
desempenho do sistema se as dinâmicas forem altamente não lineares. O EKF também pode
requerer o cálculo de matrizes Jacobianas, o que pode gerar mais erros e aumentar o tempo de
processamento total.
Outro fator limitante no sucesso dos sistemas de rastreamento IMU e MARG é número de
unidades inerciais de medida necessárias para acompanhar movimentos complexos do corpo
humano. Um grande número de sensores aumenta a quantidade de variáveis e cálculos do
sistema. Consequentemente, o aumento das dimensões do modelo e do número de equações
altamente não lineares tornam o EKF um algoritmo computacionalmente caro e com problemas
de estabilidade.
Sabendo disso, Sebastian Madgwick apresentou um novo algoritmo para um filtro de
correção da orientação para sistemas IMU (acelerômetro e giroscópio) e MARG (acelerômetro,
giroscópio e magnetômetro) (MADGWICK, 2010). Para os sistemas MARG, que inclui os
sensores inerciais e o magnetômetro, o filtro incorpora possíveis distorções magnéticas e o erro
de bias do giroscópio. O filtro usa a representação da orientação em forma de quaternion
permitindo que os sinais do acelerômetro e do magnetômetro sejam incorporados em um
algoritmo analítico que usa um método do gradiente descendente otimizado para o cálculo da

42
orientação e inclinação de ambos os sensores, permitindo a correção da orientação do giroscópio
resultando em um quaternion, na saída do algoritmo, otimizado. Os maiores benefícios desse
novo algoritmo são: uma necessidade de processamento bem menor, em relação ao filtro de
Kalman, exigindo até 277 operações escalares aritméticas para a implementação em sistemas
MARG e 109 operações escalares aritméticas para sistemas IMU; é eficaz em baixas frequências
de amostragem, por exemplo 10 Hz e contêm 1 (IMU) ou 2 (MARG) parâmetros ajustáveis de
acordo com a aplicação.
A performance do novo filtro foi avaliada usando sensores comerciais da XSENS, um
sistema de captura de movimento ótico foi usado como referência para o experimento. A
performance também foi avaliada contra um algoritmo baseado em filtro de Kalman. Os
resultados indicaram que o filtro alcança altos níveis de precisão, superior ao algoritmo de
Kalman, apresentando um valor eficaz de erro (RMS) menor que 0.6º para quando os sensores
estão parados e menor que 0.8º para situações em que o sensor está em movimento. Com a
baixa necessidade computacional, e a capacidade de operar em baixas taxas de amostragem, o
algoritmo de Madgwick abre novas oportunidades de aplicação para o uso de dispositivos IMU e
MARG
4 PROPOSTA DE UM SISTEMA DE RASTREAMENTO INERCIAL PARA MEMBROS SUPERIORES
Esse trabalho propõe o desenvolvimento de protótipo de uma rede de sensores inerciais
para captura de movimentos dos membros superiores, bem como a implementação de uma
aplicação para a visualização tridimensional das estruturas biomecânicas associadas em tempo
real.
Para tal, foram adquiridos 3 módulos de medição inercial, cada módulo será acoplado a
um segmento diferente dos membros superiores sendo que, o módulo 1 ou referência será
colocado sobre o osso externo no peitoral, o módulo 2 será posicionado ao braço próximo a
articulação do cotovelo e o módulo 3 será acoplado ao antebraço próximo a articulação radioulnar
como ilustra a Figura 12.

Figura 12 : Diagrama de conexão e posicionamento dos sensores sobre os membros superiores e as
Na Figura 12 os quadrados na cor preta representam os módulos inerciais, a linha verde
representa os segmentos e fios que ligam um modulo ao outro.
envia, via comunicação I2C
quaternions, realiza um processo de filtragem dos sinais e envia os resultados para CPU pela
USB. Na CPU os quaternions são usados para calcu
12, depois de cada movimento,
biomecânica dos membros sup
4.1 MÓDULO INERCIAL GY87
Para o protótipo do projeto, foram adquiridas
: Diagrama de conexão e posicionamento dos sensores sobre os membros superiores e as posições que serão calculadas pela aplicação.
os quadrados na cor preta representam os módulos inerciais, a linha verde
representa os segmentos e fios que ligam um modulo ao outro. Cada mó
envia, via comunicação I2C, um quaternion para o arduino. A placa arduino coleta todos os
quaternions, realiza um processo de filtragem dos sinais e envia os resultados para CPU pela
USB. Na CPU os quaternions são usados para calcular as novas posições, indicadas na
depois de cada movimento, dessa forma é possível estimar a posição final de toda a estrutura
biomecânica dos membros superiores.
MÓDULO INERCIAL GY87
Para o protótipo do projeto, foram adquiridas três unidades de medição inercial
Figura 13: Módulo GY 87.
43
: Diagrama de conexão e posicionamento dos sensores sobre os membros superiores e as
os quadrados na cor preta representam os módulos inerciais, a linha verde
ódulo inercial calcula e
. A placa arduino coleta todos os
quaternions, realiza um processo de filtragem dos sinais e envia os resultados para CPU pela
lar as novas posições, indicadas na Figura
estimar a posição final de toda a estrutura
idades de medição inercial GY 87, o
44
circuito é composto por um MPU (Motion Processing Unit) 6050, um magnetómetro HMC5883L e
um modulo de pressão, barômetro BMP180, ou seja, o circuito tem um total de 10 graus de
liberdade. A alimentação do circuito é feita com 3.3V, e a pinagem do módulo é ilustrado na
Figura 13.
O MPU6050 é fabricado pela InvenSense, este módulo inercial possui no mesmo,
encapsulamento, um acelerômetro e um giróscopio de alta precisão baseado em tecnologia
MEMS. No total são seis graus de liberdade, sendo três para o acelerômetro e três para o
giroscópio. Existe também a possibilidade da ligação de um magnetômetro externo através dos
pinos auxiliares. Processo que é executado nesse projeto.
O MPU6050 possui internamente um recurso ou biblioteca chamado DMP (Digital Motion
Processor). A DMP permite que o algoritmo de detecção de movimento seja processado pelo
próprio módulo livrando microcontrolador dessa tarefa. A DMP faz a aquisição dos sinais do
acelerômetro, giroscópio e do sensor externo e faz um processamento de dados. O resultado
pode ser lido diretamente ou colocado em um buffer do tipo FIFO (First In First Out) de 1024
bytes.
Além de todos esses recursos, o MPU6050 possui internamente conversores Analógico /
Digital de 16 bits de resolução para cada canal, dessa forma todos os sinais podem ser
amostrados ao mesmo tempo. Essa unidade de medição inercial apresenta também ganho
ajustável para os dois sensores. O acelerômetro pode ser regulado para ±2g, ±4g, ±8g e ±16g, já
o giróscopio pode ser regulado para um range sensibilidade de ±250, ±500, ±1000 e ±2000 graus
por segundo.
No projeto, o magnetómetro externo que já está embutido no módulo GY 87 é o
HMC5883L. Esse magnetómetro é um CI desenvolvido para campos magnéticos de baixa
intensidade, possui três graus de liberdade (X, Y e Z) e um conversor Analógico / Digital interno
de 12 bits que possibilita o CI de medir a direção do campo magnético com precisão de 1 a 2
graus.
Todas as características elétricas e especificações de cada CI e o esquemático do circuito
elétrico da placa GY 87 podem ser encontrados nos anexos 9.1, 9.2, 9.3, 9.4.
45
4.2 MÓDULO DE INTEGRAÇÃO DA COMUNICAÇÃO DOS SENSORE S COM O
COMPUTADOR HOST
Como foi discutido no item 2.8, no barramento I2C, a comunicação com qualquer
dispositivo externo ao microcontrolador é formado por apenas dois fios (SCL e SDA), sendo que
a quantidade de dispositivos é limitada pelo tamanho do endereço do mesmo e da capacidade de
processamento do microcontrolador. Para esse projeto foram necessários três módulos GY 87,
todos ligados ao mesmo barramento I2C.
Entretanto, por definição de hardware, todas as unidades de medição inercial apresentam
o mesmo endereço interno. O sensor MPU6050 (acelerômetro + giróscopio) é definido pelo
endereço 0x68 quando pino AD0 está conectado diretamente ao terra e 0x69 quando o pino AD0
está ligado diretamente à alimentação, o magnetómetro possui o endereço fixo 0x1E. Ou seja,
quando o microcontrolador da placa ARDUINO enviar um comando pelo barramento I2C todos os
sensores inerciais irão responder ao mesmo tempo, o que pode levar à perda de dados e colapso
total do sistema de aquisição de dados. Para contornar esse problema foi idealizado uma
configuração do protótipo utilizando uma porta logica AND para escolher para qual unidade de
medição inercial o pulso de clock (SCL) será enviado. Como os sensores só respondem se o
microcontrolador enviar um comando, não foi necessário aplicar a mesma lógica com a porta
AND para receber os dados, ou seja, todas as placas estão ligadas diretamente ao fio SDA do
barramento I2C. O esquemático completo foi montado no software PROTEUS, o resultado é
ilustrado na Figura 14.

46
Figura 14: Esquema elétrico completo do modulo de com unicação dos sensores com o computador HOST.
47
A frequência de amostragem do sistema e o baudrate da placa arduino foram
configurados em 100HZ e 115200 bits por segundo, respectivamente.
4.3 MODELAGEM MATEMÁTICA
Para calcular as posições de cada articulação dos membros superiores e a posição final
da mão (end effector), primeiramente, é necessário definir a posição de origem de cada um dos
sensores e associar a cada deles um vetor que representa um segmento dos membros
superiores. No total são definidos 4 vetores. O primeiro (?1) representa distância da origem do
sistema, no osso externo do peitoral, até a base do pescoço, o segundo vetor (?2% representa a
distância da base do pescoço até a articulação do ombro, o terceiro vetor (?3% é a distância da
articulação do ombro até a articulação do cotovelo, e o último vetor (?4% representa a distância da
articulação do cotovelo até a articulação radioulnar.
Definido as posições de origem do sistema, é necessário realizar o cálculo de offset da
posição estimada em relação a posição de referência, dessa forma, independente da posição
inicial do usuário a representação dos membros superiores na aplicação sempre terá posição
inicial igual a posição de referência escolhida nas configurações da aplicação. A posição inicial
escolhida para o sistema foi a posição T, onde o usuário deve ficar em pé, com o corpo ereto,
membros superiores levantados formando um ângulo de 90º com linha mediana do corpo e
palma da mão para baixo.
Para o cálculo do offset foi criado uma função que recebe a posição estimada pelo
quaternion e calcula a diferença de ângulo entre o vetor posição estimado e o vetor posição de
referência, considerando a posição T. Utilizando o conceito de produto vetorial, também é
calculado um vetor de rotação entre o vetor posição estimado e o vetor posição de referência.
Sabe-se que com um eixo de rotação e um ângulo, tem – se a representação de uma rotação em
eixos e ângulos, usando a equação 17 é possível obter a representação do eixo e ângulo na
forma de quaternion.
O quaternion calculado representa a rotação necessária que o vetor posição estimado
deve realizar para atingir a posição de referência. Dessa forma, a cada novo quaternion calculado
pela DMP do MPU6050 é necessário aplicar o produto de quaternions entre o novo quaternion e
o quaternion de offset aplicando-se a equação 20. Nesse caso, como a multiplicação de
quaternions é não comutativa, deve-se considerar a ordem de multiplicação, logo:
.7IJ = .KLJ ∗ .IMMLKJ (26)

48
Com o protótipo devidamente calibrado, deve-se calcular as posições de cada ponto das
articulações a cada novo quaternion que é recebido pela USB. A partir de uma posição inicial
conhecida do membro superior e de um vetor associado ao mesmo, é possível determinar a
próxima posição do segmento aplicando-se a equação 18, onde .@ é o quaternion unitário
calculado pela equação 26, e ?@ é vetor associado ao semento que será rotacionado e .-� é o
quaternion inverso do quaternion de rotação definido pela equação 19. Logo, serão calculados
quatro pontos novos que representam a nova configuração da estrutura biomecânica dos
membros superiores.
Para calcular ângulos entre os segmentos adjacentes, como por exemplo entre o braço e
o antebraço, é usado o conceito de produto escalar entre dois vetores no espaço tridimensional.
Dado dos vetores v = (x, y, z) e w = (x, y, z), o produto escalar é definido pela equação 27, onde
N é o ângulo entre v e w.
?. P = |?|. |P| ∗ cos!N% (27)
4.4 APLICATIVO DE SOFTWARE PARA COLETA E PROCESSAME NTO DE
DADOS
Foi desenvolvido um aplicativo em MATLAB para coleta e processamento de dados
recebidos pela porta USB, bem como a visualização tridimensional das estruturas biomecânicas
associadas aos movimentos dos membros superiores.
O script em MATLAB primeiro define os vetores que são associados segmentos do corpo,
e declara as posições iniciais de cada segmento e configura o plot da figura tridimensional que
fará a representação da estrutura biomecânica dos membros superiores em tempo real, depois
verifica qual porta USB a placa arduino está conectada, posteriormente executada um protocolo
de ‘handshake’ para iniciar a comunicação com o microcontrolador. Com a porta serial aberta, os
3 quaternions relacionados a cada sensor (S1, S2 e S3) são salvos em buffers diferentes.
Na execução do programa é calculado o quaternion de offset com relação a posição
inicial definida no aplicativo, posteriormente o script apresenta um loop infinito de aquisição de
dados, rotação de vetores, cálculo das novas posições dos segmentos e realiza o plot dos
resultados. A Figura 15 ilustra o plot tridimensional dos segmentos que representam os membros
superiores do corpo humano.

49
5 EXPERIMENTOS DE VALIDAÇÃO
5.1 SENSOR ESTACIONÁRIO
Na primeira etapa de experimentos para a validação do protótipo foi avaliada a leitura dos
sensores considerando o modulo de medição inercial parado com o eixo Z apontando para baixo
rumo ao centro da terra. Essa fase teve como objetivo a avaliação dos valores mínimos de erro
aceitáveis. Os resultados obtidos foram confrontados com os datasheets respectivos de cada
sensor para indicar possiveis falhas de fabriação ou mal funcionamento dos sensores.
Figura 16: Acelerômetro. GY 87 parado sobre a mesa, com o eixo Z apontando para baixo.
Figura 15: Interface do aplicativo de aquisição e processame nto dos sinais.

50
Como pode-se analisar pelas figuras acima, todos os sensores apresentavam um
pequeno ruído, porém este estava dentro das especificações técnicas. O acelerômetro, quando
está parado com o eixo Z apontando para baixo deve medir apenas aceleração da gravidade, ou
seja, +1g (1 unidade g é igual a 9,84 metros por segundo ao quadrado). O giróscopio é capaz de
medir velocidade angular e como o sensor estava parado, os valores medidos deveriam estar
próximos de zero, outro ponto importante a se destacar é o drift inerente ao sistema do giróscopio
e como esse problema influencia na diferença de medida entre os três eixos e também no
Figura 17: Giróscopio. GY 87 parado sobre a mesa, com o eixo Z apontando para baixo.
Figura 18: Magnetómetro. GY 87 parado sobre a mesa, com eixo Z apontando para baixo.

51
processo de integração para se obter os ângulos de rotação do sensor. Já o magnetómetro é
capaz de mensurar o campo magnético da terra e possíveis campos magnéticos externos de
outros equipamentos, esse sensor é bem estável e não apresenta nenhum tipo de drift ou offset,
o único problema está ligado a campos magnéticos externos que podem distorcer as medidas do
magnetómetro e inserir ruídos no sinal, esses campos são gerados por quaisquer dispositivos ou
materiais ferromagnéticos próximos ao sensor, geralmente a distâncias menores do que um
metro.
5.2 UM SENSOR EM DESLOCAMENTO ANGULAR
A segunda fase de experimentos abordou a capacidade que um sensor tem de medir
ângulos em um plano qualquer. Para tal, foi montado um sistema simples com a ajuda de uma
régua e um goniômetro (transferidor) para medir ângulos em relação ao eixo x em um plano xy.

52
Figura 19: Esquema para medir ângulos no pl ano XY usando apenas um sensor.
Para representar o experimento no aplicativo no software MATLAB foram criados quatro
gráficos diferentes, sendo um para representar o plano tridimensional, e os demais para
representar os planos XY, XZ e YZ, respectivamente. Os resultados são ilustrados nas figuras 20,
21, 22 e 23.
Representar a vista dos três planos (XY, XZ e YZ) ajuda a compreender melhor a
representação do sensor no plano tridimensional e também possibilita uma melhor análise gráfica
dos resultados para mensurar os ângulos obtidos.
Nas figuras a seguir, o sensor acoplado a régua foi levantado até atingir um ângulo de 90º
com relação ao plano XY.
53
Figura 20: Representação de um sensor no plano trid imensional formando um ângulo de 90º com o plano xy .
Figura 21: Representação de um sensor no plano XY f ormando um ângulo de 90º com o plano XY.

54
Figura 22: Representação de um sensor no plano XZ f ormando um ângulo de 90º com o plano XY.
Figura 23: Representação de um sensor no plano XZ f ormando um ângulo de 90º com o plano XY.

55
A Tabela 3 ilustra os resultados obtidos para um experimento onde o ângulo medido é
ângulo formado entre o módulo GY87 e o eixo X em um plano XY, desconsiderando o
comportamento do sensor no eixo Z (análise bidimensional). Os resultados obtidos para essa
fase de teste apresentaram uma variação de ±3 graus em todos eixos, ou seja, um erro de até
8% do valor real do ângulo aferido. Esse erro pode estar ligado a diversos fatores, como o
manuseio do sensor durante o experimento, características da placa e sensibilidade dos sensores
a pequenas variações das forças inerciais.
Tabela 3: Angulo Real mensurado pelo transferidor e Ângulo mensurado pelos sensores no plano xy.
Angulo Real (º) Ângulo Mensurado (º) Erro (%)
30 32 6.67 45 41 8.89 60 63 5.00 90 89 1.10
5.3 DOIS SENSORES EM DESLOCAMENTO ANGULAR
Para a terceira etapa de testes para a validação do protótipo foram usados dois sensores,
sobre uma estrutura de madeira que foi construída para simular o movimento do braço e do
antebraço, considerando apenas a articulação do cotovelo. A Figura 24 ilustra todo o
experimento. O objetivo dessa fase de experimentos consistia em avaliar a confiabilidade dos
quaternions para determinar o ângulo entre dois segmentos adjacentes usando dois módulos de
medição inercial
Para mensurar o ângulo formado entre os dois segmentos foram usadas as ferramentas
matemáticas descritas no capitulo 4.3.
A representação da estrutura de madeira na aplicação MATLAB é ilustrada na Figura 25.
Os resultados obtidos nessa etapa são apresentados na Tabela 4.
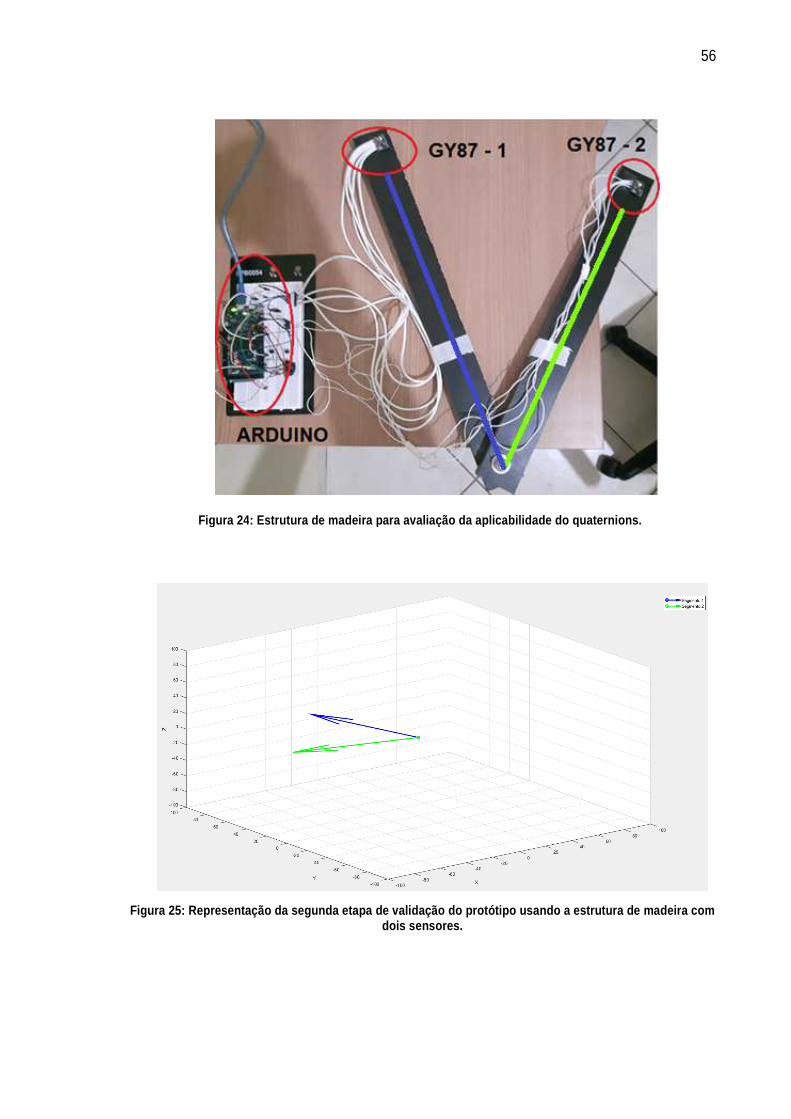
56
Figura 25: Representação da segunda etapa de validação do pr otótipo usando a estrutura de madeira com dois sensores.
Figura 24: Estrutura de madeira para avaliação da aplicabili dade do quaternions.
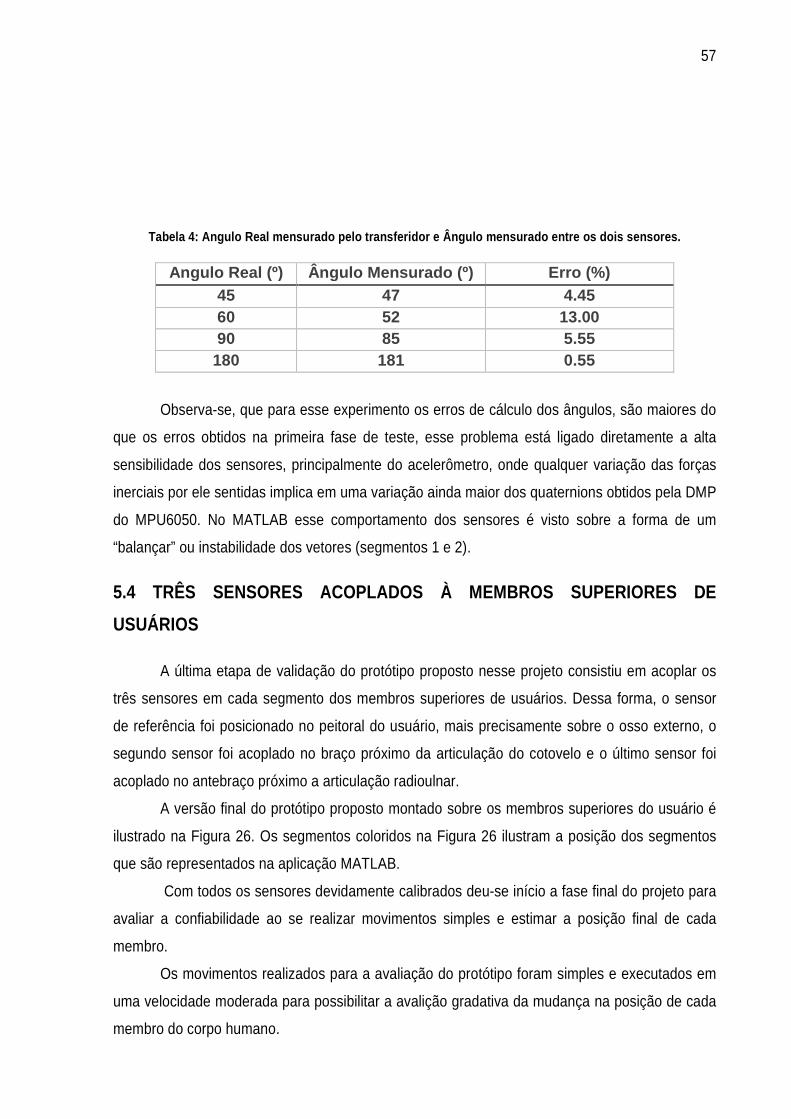
57
Tabela 4: Angulo Real mensurado pelo transferidor e Ângulo mensurado entre os dois sensores.
Angulo Real (º) Ângulo Mensurado (º) Erro (%) 45 47 4.45 60 52 13.00 90 85 5.55
180 181 0.55
Observa-se, que para esse experimento os erros de cálculo dos ângulos, são maiores do
que os erros obtidos na primeira fase de teste, esse problema está ligado diretamente a alta
sensibilidade dos sensores, principalmente do acelerômetro, onde qualquer variação das forças
inerciais por ele sentidas implica em uma variação ainda maior dos quaternions obtidos pela DMP
do MPU6050. No MATLAB esse comportamento dos sensores é visto sobre a forma de um
“balançar” ou instabilidade dos vetores (segmentos 1 e 2).
5.4 TRÊS SENSORES ACOPLADOS À MEMBROS SUPERIORES DE
USUÁRIOS
A última etapa de validação do protótipo proposto nesse projeto consistiu em acoplar os
três sensores em cada segmento dos membros superiores de usuários. Dessa forma, o sensor
de referência foi posicionado no peitoral do usuário, mais precisamente sobre o osso externo, o
segundo sensor foi acoplado no braço próximo da articulação do cotovelo e o último sensor foi
acoplado no antebraço próximo a articulação radioulnar.
A versão final do protótipo proposto montado sobre os membros superiores do usuário é
ilustrado na Figura 26. Os segmentos coloridos na Figura 26 ilustram a posição dos segmentos
que são representados na aplicação MATLAB.
Com todos os sensores devidamente calibrados deu-se início a fase final do projeto para
avaliar a confiabilidade ao se realizar movimentos simples e estimar a posição final de cada
membro.
Os movimentos realizados para a avaliação do protótipo foram simples e executados em
uma velocidade moderada para possibilitar a avalição gradativa da mudança na posição de cada
membro do corpo humano.

A primeira posição avaliada é a própria posição de referência
alguns segundos de coleta, é po
mesmos apresentam algum drift com o passar do tempo que possa deteriorar a performance do
software no MATLAB. A Figura
ilustra o resultado obtido na aplicação do
Figura
Como pode-se avaliar, os resultados obtidos s
sensores a posição inicial é de fato a posição de
Figura 27: Avaliação do protótipo
A primeira posição avaliada é a própria posição de referência (posição T)
alguns segundos de coleta, é possível avaliar a estabilidade na leitura dos sensores e se os
mesmos apresentam algum drift com o passar do tempo que possa deteriorar a performance do
Figura 26 ilustra a posição T (referência para o sistema) e a
a aplicação do MATLAB.
Figura 26: Avaliação do protótipo - Posição T (Referência).
se avaliar, os resultados obtidos são satisfatórios. Ao se iniciar a leitura dos
ição inicial é de fato a posição de referência, entretanto após um minuto de coleta
: Avaliação do protótipo - Posição T (Referência) – MATLAB.
58
(posição T). Considerando
ssível avaliar a estabilidade na leitura dos sensores e se os
mesmos apresentam algum drift com o passar do tempo que possa deteriorar a performance do
ilustra a posição T (referência para o sistema) e a Figura 27
Posição T (Referência).
ão satisfatórios. Ao se iniciar a leitura dos
, entretanto após um minuto de coleta
MATLAB.

59
os resultados no MATLAB apresentam um pequeno drift em relação a posição de origem, onde o
segmento base tem uma inclinação e o ângulo entre o segmento do braço e do braço é menor do
que 180º. Esse problema pode estar ligado a pequenos movimentos que usuário pode realizar
involuntariamente durante o tempo de coleta, até porque manter o braço esticado completamente
por um minuto é relativamente difícil e pode até ser um incômodo para o usuário.
A segunda posição avaliada é ilustrada na Figura 28, onde o antebraço está flexionado
formando um ângulo de 90º com o braço, e este possui um ângulo de 90º em relação a linha
mediana do corpo. Os resultados obtidos na aplicação em MATLAB estão ilustrados na Figura
29.
Foi realizado uma coleta com duração de um minuto para avaliar também a estabilidade
dos sensores nessa posição. Os resultados obtidos são satisfatórios e não apresentaram um drift
significativo em relação a posição real. Da mesma forma, os erros obtidos podem estar ligados a
capacidade do usuário em manter a mesma posição por um longo tempo e também a
estabilidade dos sensores.

Figura A última posição analisada é obtida através da sequência de dois movimentos, onde o
usuário inicia a coleta de dados
flexiona a articulação do cotovelo deixando o punho paralelo a linha mediana
seguida o usuário retorna para a posição T e depois rotaciona a articulação do ombro em 90º
com relação a linha mediana do corpo (eixo Z). As sequências dos resultados são
nas Figuras 31 e 32.
Figura 29: Avaliação do protótipo
Figura 28: Avaliação do protótipo - Flexão do braço e antebraço.A última posição analisada é obtida através da sequência de dois movimentos, onde o
a coleta de dados na posição de referência (posição T), posteriormente o usuário
flexiona a articulação do cotovelo deixando o punho paralelo a linha mediana
seguida o usuário retorna para a posição T e depois rotaciona a articulação do ombro em 90º
com relação a linha mediana do corpo (eixo Z). As sequências dos resultados são
: Avaliação do protótipo - Flexão do braço e antebraço
60
Flexão do braço e antebraço. A última posição analisada é obtida através da sequência de dois movimentos, onde o
posteriormente o usuário
flexiona a articulação do cotovelo deixando o punho paralelo a linha mediana Figura 30, em
seguida o usuário retorna para a posição T e depois rotaciona a articulação do ombro em 90º
com relação a linha mediana do corpo (eixo Z). As sequências dos resultados são apresentados
Flexão do braço e antebraço – MATLAB.

Figura
Figura 32: Avaliação do protótipo
Figura 31: Avaliação do protótipo
Figura 30: Avaliação do protótipo - Flexão do antebraço.
: Avaliação do protótipo - Rotação da articulação do ombro
: Avaliação do protótipo - Flexão do antebraço - MATLAB.
61
Rotação da articulação do ombro – MATLAB.
MATLAB.

62
6 DISCUSSÃO
Os resultados obtidos são satisfatórios, mas carecem de melhorias. Durante uma
sequência de movimentos, apesar de possíveis erros de exatidão, conforme mostram as tabelas
3 e 4, o erro mais significativo está ligado a posição do último segmento, ou seja, a posição da
articulação radioulnar.
Considera-se que, devido à instabilidade dos sensores, com um tempo maior de coleta e
uma sequência mais complexa de movimentos, o erro de cálculo da posição de cada segmento
dos membros superiores em relação a posição real dos membros do usuário, apresente valores
ainda maiores o que pode deteriorar a capacidade de rastreamento do sistema.
O protótipo apresentado nesse trabalho é estável mesmo durante longos períodos de
tempo de aquisição e movimentos realizados em uma velocidade mediana, porém carece de
exatidão para a determinação das posições de cada articulação do corpo humano. Quanto mais
63
complicados forem os movimentos realizados maior tende a ser erro da posição dos segmentos.
Caso que acontece durante o movimento de pronação e supinação dos membros superiores.
Os erros de cálculo da posição estão diretamente ligados a instabilidade dos sensores,
principalmente do acelerômetro, que é um sensor muito sensível a qualquer variação das forças
inerciais por ele aferidas.
Outro ponto importante que interfere na exatidão do protótipo é calibração dos sensores.
Para melhorar a exatidão dos sensores é necessário a implementação de uma rotina eficiente de
calibração, principalmente do acelerômetro e do magnetômetro que está sujeito a interferência de
campos magnéticos externos. Calibração é um conjunto de operações que estabelecem, sob
condições especificadas, a relação ente valores indicados por um instrumento de medição e os
valores correspondentes aos padrões utilizados, ou seja, é necessário determinar um offset entre
as leituras aquisicionadas e as leituras reais das unidades de medição inercial.
A despeito dos erros, o protótipo de rastreamento da posição dos membros superiores
usando sensores inerciais provou a viabilidade da técnica de rastreamento proposta. Os
quaternions são bem mais estáveis para realizar rotações de corpos rígidos e aplicação em
cinemática direta, da mesma forma, demandam da necessidade de um baixo processamento da
CPU para calcular todas as posições de cada segmento, em tempo real.
O mesmo protótipo abordando o conceito de ângulos de Euler ou matrizes de rotações
estaria sujeito a outros erros como por exemplo, o Gimbal lock, da mesma forma a necessidade
de processamento aumentaria principalmente para os cálculos que envolvem as matrizes de
rotação.
As principais dificuldades encontradas durante a concepção, confecção e validação do
protótipo, foram:
• Entender, estudar e aplicar os quaternions em cinemática direta;
• Realizar comunicação I2C entre o módulo GY87 e a placa arduino DUE;
• Fazer a leitura de mais de um sensor ao mesmo tempo sem a perda de dados;
• Criar uma rotina de calibração (acelerômetro, giroscópio e magnetómetro);
• Determinar a melhor forma de calcular o quaternion offset para a posição de
referência do sistema.

64
7 CONCLUSÃO
O projeto propõe um protótipo para rastreamento de movimentos do corpo humano que
apresenta diversas vantagens e desvantagens em relação aos sistemas de rastreamento
tradicionais, sejam eles sistemas mecânicos, ópticos, magnéticos ou acústicos. As principais
vantagens do protótipo proposto são: custo relativamente baixo; não existe a necessidade de
marcadores e pós processamento de imagens para estimar a posição do corpo humano, é
possível realizar coletas fora de laboratórios de pesquisa ou grandes estúdios; a portabilidade do
sistema permite aplicação in-home para avaliação da saúde de pacientes. Os pontos negativos
do sistema são: o custo dos sensores está ligado diretamente à sua qualidade, sensibilidade e
erros mínimos aceitáveis de leitura; complexidade dos cálculos, compressão do sistema numérico
dos quaternions e a concepção de uma rotina de calibração dos sensores inerciais e magnéticos.
65
Pode-se concluir que o trabalho obteve sucesso, a despeito das limitações do protótipo e
aos erros na determinação das posições das articulações dos membros superiores. O protótipo
projetado e montado funcionou corretamente, e a comunicação I2C com os sensores foi
implementada com sucesso. O cálculo da posição dos membros superiores, com a aplicação dos
conceitos de cinemática direta e quaternions apresentou os resultados esperados, respondendo
rapidamente e com um erro relativamente pequeno em relação a posição real do usuário.
O projeto avaliou a performance do sistema proposto realizando a análise da capacidade
dos sensores em medir ângulos em relação a pontos fixos ou em relação a outros sensores e
capacidade do sistema em rastrear cada segmento do corpo humano durante a realização de
alguns movimentos. Os resultados obtidos foram aceitáveis indicando que o sistema proposto
para rastreamento de movimentos pode ser integrado em diversas áreas como, controle de
equipamentos eletrônicos, produção e animação de filmes, videogames, treinamento de atletas,
diagnóstico do estado de saúde de pacientes, reabilitação e análise da biomecânica.
Os próximos passos do projeto são, melhorar a rotina de calibração dos sensores
inerciais e magnéticos para um cálculo mais preciso das posições finais de cada segmento;
aplicar o protótipo para a determinação de posições mais complexas como a pronação e
supinação e melhorar o design e portabilidade do protótipo usando o rádio NRF24LE1, que
apresenta um microcontrolador 8051 em mesmo chip, para comunicação por radiofrequência
entre os sensores, criando módulos que poderão ser acoplados a diferentes segmentos do corpo
humano. Dessa forma será possível estender o protótipo para aplicações na captura de
movimentos dos membros inferiores.

66
8 REFERÊNCIAS BIBLIOGRÁFICAS
ACAR, C.; SHKEL, A. MEMS Vibratory Gyroscopes . 1. ed. [S.l.]: Springer US, v. 1, 2009.
ANDREWS, R. Detecting absolute human knee angle and angular velocity using accelerometers and rate gyroscopes. Medical and Biological Engineering and Computing , v. 39, p. 1-9, maio 2001.
BACHMANN, E.; MCGHEE, R. B. Inertial and magnetic posture tracking for inserting humans into networked virtual environments. ACM Symposium on Virtual Reality Software and Technology , Nova York, p. 9-16, 2001.
BACHMANN, E.; YUN, X.; PETERSON, C. An Investigation of the Effects of Magnetic Variations on Inertial/Magnetic Orientation Sensors . IEEE International Conference on Robotics and Automation. [S.l.]: [s.n.]. 2004.
CARCI. CARCI, 2016. Disponivel em: <http://www.carci.com.br/produto/index/detalhes/fitness-goniometro-de-bolso---aco-inox---180º---saehan-_797.html>. Acesso em: 22 maio 2016.
EL-GOHARY, M. A. Joint Angle Tracking with Inertial Sensors . Portland State University. [S.l.], p. 41 - 42. 2013.
FERREIRA, A. B. D. H. Dicionário Aurélio da Língua Portuguesa . [S.l.]: Positivo, 2010. ISBN 9788538542407.
FOXLIN, E. Inertial head-tracker fusion by a complementary separate-bias Kalman Filter. In Proceedings of Virtual Reality Annual International Sympotions , v. 6/25, p. 38-46, nov. 1996.
FOXLIN, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Computer Graphics and Applications , p. 38-46, nov. 2005.
FOXLIN, E. M. H.; ALTSHULER, Y. Miniature 6-DOF inertial sysem for tracking HMDs. In Helmet and Head-Mounted Displays , 1998.
GIANSANTI, D.; MACCIONI, G.; MACELLARI, V. The Development and Test of a Device for the Reconstruction of 3-D Position and Orientation by Means of a Kinematic Sensor Assembly With Rate Gyroscopes and Accelerometers. IEEE Transactions on Biomedical Engineering , p. 1271-1277, jul. 2005.
GIANSANTI, D.; MACELLARI, V.; MACCIONI, G. Is it Feasible to Reconstruct Body Segment 3-D Position and Orientation Using Accelerometric Data? IEEE Transactions on Biomedical Engineering , v. 4/50, p. 476-483, abr. 2003.
GRASSIA, F. S. Practical Parameterization of Rotations Using the Exponential Map. The Journal of Graphics Tools , v. 3.3, 1998.
GREWAL, M. S.; ANDREWS, A. P. Kalman Filtering: Theory and Practice with MATLAB. 4. ed. [S.l.]: Wiley-IEEE Press, v. 1, 2014.
GYPSY. Gypsy 7™ Motion Capture System, 2016. Disponivel em: <https://metamotion.com/gypsy/gypsy-motion-capture-system.htm>. Acesso em: 06 maio 2016.

67
HALLIDAY, D.; RESNICK, R. Fundamentos de Física 1 - Mecânica . [S.l.]: LTC, v. Volume 1, 2012.
HAMILL, J.; KNUTZEN, K. M. Bases Biomecânicas do Movimento Humano . 3. ed. [S.l.]: [s.n.], v. 1, 2012.
HAMILTON, W. R. On Quaternions or on a new System of imaginaries in algebra . [S.l.]: [s.n.], 2000.
HANSARD, M.; LEE, S.; CHOI, O. Time-of-Flight Cameras: Principles, Methods and Applications. [S.l.]: Springer, 2013. ISBN 978-1447146575.
KANG, D. et al. Human Body Motion Capture System using Magnetic and Inertial Sensor Modules . International Universal Communication Symposium. [S.l.]: [s.n.]. 2011.
KIM, P. Rigid Body Dynamics For Beginners: Euler angles & Quaternions. [S.l.]: CreateSpace, v. 1, 2013.
LEE, K. B. Principles of Microelectromechanical Systems . 1º. ed. [S.l.]: [s.n.], 2011.
LIBERTY. Polhemus Innovation in Motion, 2016. Disponivel em: <http://polhemus.com/motion-tracking/all-trackers/liberty>. Acesso em: 06 maio 2016.
LIN, J. F. S.; KULIć, D. Human pose recovery using wireless inertial measurement units. Physiological Measurement , v. 33, Novembro 2012.
LIU, C. Foundations of MEMS . 2º. ed. [S.l.]: Pearson, 2013.
LUINGE, H. J. Inertial Sensing of Human Motion. PhD Thesis , Holanda, dez. 2002.
LUINGE, H. J.; H., V. P.; M., B. C. T. Estimating orientation with gyroscopes and accelerometers. Technology and Health Care , v. 6/7, p. 455-459, jan. 1999.
MADGWICK, S. O. H. An efficient orientation filter for inertial and in ertial/magnetic sensor arrays . [S.l.]. 2010.
MAENAKA, K. Vibrating Beam Accelerometer with Hard Suspension Beams. Solid-State Sensors, Actuators and Microsystems Conference , 14 Junho 2007. 1207 - 1210.
MAENAKA, K. MEMS inertial sensors and their applications. 5th International Conference onNetworked Sensing Systems - IEEE , 19 Junho 2008. 71 - 73.
MARQUES, A. P. Manual de Goniometria . [S.l.]: Manole, 2003. ISBN 8385586.
MILLOR, N.; LECUMBERRI, P.; GÓMEZ, M. Drift-Free Position Estimation for Periodic Movements Using Inertial Units. IEEE Journal of Biomedical and Health Informatics , v. 18, p. 1131-1137, dez. 2013.
OPTITRACK. Optitrack, 2016. Disponivel em: <http://www.optitrack.com>. Acesso em: 06 maio 2016.

68
QUALISYS. Qualisys. Swedish motion capture company., 2016. Disponivel em: <http://www.qualisys.com>. Acesso em: 06 maio 2016.
RIPKA, P. Magnetic Sensors and Magnetometers . [S.l.]: Artech House Publishers, 2001.
ROBOTICS, C. CH Robotics , 2016. Disponivel em: <http://www.chrobotics.com/library/understanding-quaternions>. Acesso em: 22 maio 2016.
RODRIGUES, V. ArduinoBR , 2014. Disponivel em: <http://www.arduinobr.com/arduino/i2c-protocolo-de-comunicacao/>. Acesso em: 25 maio 2016.
ROETENBERG DANIEL. Inertial and Magnetic Sensing of Human Motion. PhD Thesis , Holanda, 2006.
ROETENBERG DANIEL, H. J. L. C. T. M. B. A. P. H. V. Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation . IEEE Transactions on Neural Systems and Rehabilitation Engineering. [S.l.]: [s.n.]. 2005. p. 395-405.
ROETENBERG DANIEL, P. J. S. A. P. H. V. Ambulatory Position and Orientation Tracking Fusing Magnetic and Inertial Sensing . IEEE Transactions on Biomedical Engineering. [S.l.]: [s.n.]. 2009. p. 883-890.
SABATINI, A. M. Dead-Reckoning Method for Personal Navigation Systems Using Kalman Filtering Techniques to Augment Inertial/Magnetic Sensing. Computer and Information Science » Artificial Intelligence » , Vienna, Abril 2009.
SAUNDERS, J. B. D. M.; INMAN, V. T.; EBERHART, H. D. The major determinants in normal and pathological gait. The Journal of Bone and Joint Surgery , Julho 1953. 543 - 558.
SOMMER, G.; ROSENHAHN, B. The Twist Representation of Shape . [S.l.]: Bericht Nr. 0407, 2014.
TORRES, H. Sistemas Embarcados , 2016. Disponivel em: <http://www.embarcados.com.br/sensores-inerciais-parte-1/>. Acesso em: 22 maio 2016.
VICON. Vicon Motion Capture, 2016. Disponivel em: <http://www.vicon.com>. Acesso em: 06 maio 2016.
WARD, N. NVWARD, 2016. Disponivel em: <http://nward.com>. Acesso em: 22 maio 2016.
WILLEMSEN, A. T. M.; ALSTE, J. A. V.; BOOM., H. B. K. Real time gait assessment utilizing a new way of accelerometery. Journal of Biomechanics , v. 8/23, p. 859-863, 1990.
WILLEMSEN, A. T. M.; FRIGO, C.; BOOM, H. B. K. Lower extremity angle measurement with accelerometers – error and sensitivity analysis. IEEE Transactions on Biomedical Engineering , v. 12/38, p. 1186-1193, 1991.
XSENS. Xsens – the leading innovator in 3D motion tracking technology, 2016. Disponivel em: <https://www.xsens.com>. Acesso em: 06 maio 2016.
69
ZHOU, H. et al. Use of multiple wearable inertial sensors in upper limb motion tracking. Medical Engineering & Physics , v. 30, p. 12-133, 2008.
ZHOU, H.; HU, H. Upper limb motion estimation from inertial measurements. International Journal of Information Technology , p. 1-14, 2007.
ZHOU, H.; HU, H. Reducing drifts in the inertial measurements of wrist and elbow positions. IEEE Transactions on Instrumentation and Mea- , v. 3/59, p. 575-585, 2010.
9 ANEXOS

70
9.1 ESQUEMA ELÉTRICO MÓDULO GY 87

71
9.2 ESPECIFICAÇÕES DO SENSOR MPU6050 – ACELERÔMETRO
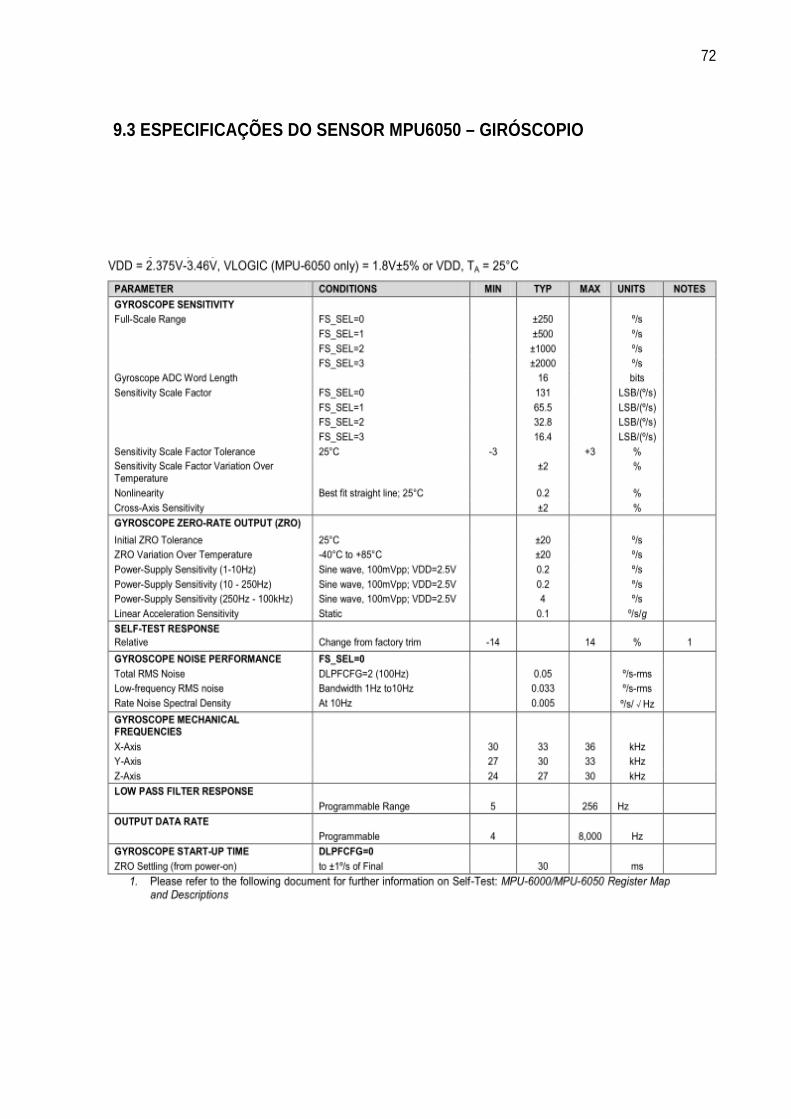
72
9.3 ESPECIFICAÇÕES DO SENSOR MPU6050 – GIRÓSCOPIO

73
9.4 ESPECIFICAÇÕES DO SENSOR HMC5883L