Embed Size (px)
Citation preview
UUNNIIVVEERRSSIIDDAADDEE FFEEDDEERRAALL DDEE UUBBEERRLLÂÂNNDDIIAA
FFAACCUULLDDAADDEE DDEE EENNGGEENNHHAARRIIAA EELLÉÉTTRRIICCAA
PPÓÓSS--GGRRAADDUUAAÇÇÃÃOO EEMM EENNGGEENNHHAARRIIAA EELLÉÉTTRRIICCAA
UMA CONTRIBUIÇÃO PARA APLICAÇÃO DE
MOTORES DE INDUÇÃO LINEARES
EM SECADORES DE CEREAIS
DISSERTAÇÃO DE MESTRADO
Autor: SUSSUMU CALIENTO TANIMOTO
AGOSTO – 2006

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

FICHA CATALOGRÁFICA Elaborada pelo Sistema de Bibliotecas da UFU / Setor de Catalogação e Classificação
T164c
Tanimoto, Sussumu Caliento, 1956-
Uma contribuição para a aplicação de motores de indução lineares em
secadores de cereais / Sussumu Caliento Tanimoto. - 2006.
149f. : il.
Orientador: Décio Bispo.
Dissertação (mestrado) – Universidade Federal de Uberlândia, Progra-
ma de Pós-Graduação em Engenharia Elétrica.
Inclui bibliografia.
1. Sistemas de energia elétrica - Teses. 2. Máquinas elétricas - Teses. I.
Bispo, Décio. II. Universidade Federal de Uberlândia. Programa de Pós-
Graduação em Engenharia Elétrica. III. Título.
CDU: 621.311

UUNNIIVVEERRSSIIDDAADDEE FFEEDDEERRAALL DDEE UUBBEERRLLÂÂNNDDIIAA
FFAACCUULLDDAADDEE DDEE EENNGGEENNHHAARRIIAA EELLÉÉTTRRIICCAA
PPÓÓSS--GGRRAADDUUAAÇÇÃÃOO EEMM EENNGGEENNHHAARRIIAA EELLÉÉTTRRIICCAA
UMA CONTRIBUIÇÃO PARA APLICAÇÃO DE
MOTORES DE INDUÇÃO LINEARES
EM SECADORES DE CEREAIS
DISSERTAÇÃO DE MESTRADO
Dissertação apresentada ao Departamento de Pós Graduação em Engenharia Elétrica da Universidade Federal de Uberlândia para obtenção do título de Mestre em Engenharia Elétrica.
BANCA EXAMINADORA
Prof. DÉCIO BISPO, Dr. (UFU) – ORIENTADOR;
Prof. LUCIANO MARTINS NETO, Dr. (UFU) – Co-Orientador;
Prof. KEIJI YAMANAKA, Dr. (UFU);
Prof. BERNARDO PINHEIRO DE ALVARENGA, Dr. (UFG)
CURSO: ENGENHARIA ELÉTRICA
ÁREA DE CONCENTRAÇÃO: MÁQUINAS ELÉTRICAS
AGOSTO – 2006
UMA CONTRIBUIÇÃO PARA APLICAÇÃO DE
MOTORES DE INDUÇÃO LINEARES
EM SECADORES DE CEREAIS
SUSSUMU CALIENTO TANIMOTO
Dissertação apresentada ao Departamento de Pós Graduação em Engenharia Elétrica da Universidade Federal de Uberlândia para obtenção do título de Mestre em Engenharia Elétrica.
_________________________ __________________________________
PROF. DÉCIO BISPO DR. PROF. DARIZON ALVES ANDRADE PHD.
ORIENTADOR COORDENADOR DO CURSO DE PÓS GRADUAÇÃO

Ao Senhor nosso Deus, que torna
possível a realização de todas as
minhas obras, porque me orienta
em todos os momentos,
com a Luz da sua
Infinita Sabedoria.
AGRADECIMENTOS
À minha esposa Laura e minhas filhas, Jaqueline, Katrine, Ana Laura e Maria
Luísa que sempre me incentivaram e estiveram comigo em todos os momentos de
dificuldades.
Aos meus pais, dos quais eu herdei o espírito de luta de não desanimar em
momento algum, quaisquer que sejam as dificuldades.
À minha irmã Yaico e seu esposo Daniel, a quem tenho o compromisso da
gratidão pelo apoio constante em todos os meus momentos de dúvida e
insegurança.
Aos meus irmãos pelo apoio e incentivo ao meu trabalho.
Aos diretores da BAGEL – ARMAZÉNS GERAIS BOM JESUS LTDA, que
além do incentivo, abriram as portas da empresa para o desenvolvimento deste
trabalho e contribuíram na montagem e execução do Simulador.
Ao amigo e quase irmão, Prof. Dr. Keiji Yamanaka, que me trouxe os
incentivos iniciais para o ingresso na vida acadêmica.
Ao meu colega e colaborador, hoje Doutor, Ricardo Silva Thé Pontes, cuja
tese foi a base da montagem do meu trabalho.
Ao co-orientador Prof. Dr. Luciano Martins Neto, pelo constante auxílio com
informações e conhecimentos, e colocar máquinas e equipamentos à minha
disposição para execução deste trabalho.
Ao meu orientador e amigo, Prof. Dr. Décio Bispo, que desde o início me
trouxe incentivo, e orientação no planejamento, elaboração e execução deste
trabalho.
RESUMO
A proposta desta tese é o estudo do desempenho e eficiência do motor de
indução linear, aplicado como acionamento da eclusa de descarga em secadores
de cereais, em substituição ao Sistema Convencional utilizado anteriormente,
composto por um sistema eletropneumático, conjunto compressor, pistão
pneumático e acessórios.
A busca deste objetivo baseou-se na procura de soluções para diminuir o alto
índice de defeitos do Sistema Convencional, e que o Sistema Proposto tivesse
constituição simples e robusta, exigindo pouca manutenção por ter poucos pontos
potenciais de defeitos, e ao mesmo tempo apresentar inovação tecnológica,
eficiência produtiva e baixo consumo de energia.
Para isto foi projetado e construído um equipamento denominado de
simulador da eclusa de descarga de secador de cereais, com escala de fluxo dez
vezes menor que o sistema de campo, e neste simulador foi adaptado o motor de
indução linear proveniente de [Thé Pontes, 2003], onde foram efetuados os testes
de operação do simulador para condições de carga, medições de força e consumo
de energia.
Os resultados obtidos estão muito próximos ao esperado e atendem
perfeitamente aos objetivos deste trabalho.
Palavras chaves: Motor de indução linear, eclusa de descarga de secadores de
cereais, secadores de cereais.

ABSTRACT
The purpose of this thesis is the acting study and efficiency of the linear
induction motor, applied as driver of the discharge dam in dryers of cereals, in
substitution to the Conventional System used previously, composed by a system
electric pneumatic, group compressor, pneumatic piston and accessories.
The search of this purpose based on the looking for of solutions to reduce the
high index of defects of the Conventional System, and that the Proposed System
had simple and robust constitution, demanding little maintenance for having few
potential points of defects, and at the same time to present technological innovation,
productive efficiency and low consumption of energy.
For this it was projected and built a denominated equipment of simulator of
the dam of discharge of dryer of cereals, with flow scale ten times minor than the
field system application, and in this simulator the linear induction motor was adapted
[Thé Pontes, 2003], where the tests of operation of the simulator were made for load
conditions, measurements of force and consumption of energy.
The obtained results are very close to the expected and they assist perfectly
to the objectives of this work.
Keywords: Linear induction motor, dam dryer discharge, cereal dryers.

- i -
ÍNDICE
RESUMO.....................................................................................................................vii
ABSTRACT................................................................................................................. viii
CAPÍTULO I - INTRODUÇÃO.................................................................................... 1
1.1 Uma contribuição para aplicação de motores lineares em secadores de cereais ............................................................................................................... 1
CAPÍTULO II - ANÁLISE DO SISTEMA DE ARMAZENAGEM DE CEREAIS .......... 3
2.1 O processo produtivo atual de secagem de cereais ......................................... 3
2.2 Soluções aplicadas para diminuir as limitações do processo.......................... 4
2.3 Análise do Sistema Convencional ..................................................................... 9
2.4 Descrição do Sistema Convencional............................................................... 15
CAPÍTULO III - O MOTOR DE INDUÇÃO LINEAR ................................................. 18
3.1 O motor de indução linear ............................................................................... 18
3.2 Princípio de funcionamento do MIL................................................................. 20
3.3 Classificação quanto ao uso............................................................................ 21
3.4 Classificação quanto a geometria ................................................................... 22
3.5 Formas de onda de campo características do MIL ......................................... 24
3.6 Características dos motores de indução lineares ........................................... 26
3.7 Perdas nos motores de indução lineares ........................................................ 28
3.8 Campo magnético de translação..................................................................... 31
3.9 Elementos fundamentais no estudo das máquinas de indução trifásicas lineares ............................................................................................................ 33
3.10 Circuito equivalente do motor de indução linear ............................................. 34
3.11 Análise unidimensional do motor de indução linear........................................ 36
3.12 Densidade linear de corrente no estator ......................................................... 37
3.13 Fator de enrolamento para o MIL .................................................................... 38
- ii -
3.14 Densidade de campo magnético no entreferro ............................................... 40
3.15 Fator de Qualidade .......................................................................................... 46
3.16 Efeito Transversal de Borda ............................................................................ 49
3.17 Efeito Longitudinal de Extremidade................................................................. 52
3.18 Número de Reynolds magnético ..................................................................... 55
3.19 Inclusão do Efeito Longitudinal de Extremidade ............................................. 56
3.20 Modelagem dinâmica para os MILs................................................................. 60
3.21 Resistência do enrolamento do estator........................................................... 61
3.22 Indutância de dispersão do estator ................................................................. 62
3.23 Indutância de dispersão de linor refletida para o indutor ................................ 63
3.24 Indutância de magnetização............................................................................ 64
3.25 Resistência de linor refletida para o estator .................................................... 64
3.26 Inclusão do Efeito Transversal de Borda ........................................................ 65
3.27 Equações para o motor de indução linear....................................................... 66
3.28 Força propulsora considerando o ELE............................................................ 68
3.29 Força propulsora considerando a inclusão do ELE de entrada ...................... 70
3.30 Relação entre os fatores de correção para os ELE ........................................ 71
3.31 O motor de indução linear utilizado no projeto................................................ 73
3.32 Parâmetros elétricos do MIL utilizado no projeto ............................................ 76
3.33 Ensaios em operação...................................................................................... 77
3.34 Força medida no MIL....................................................................................... 78
CAPÍTULO IV - O SIMULADOR DA ECLUSA DE DESCARGA DE SECADOR DE CEREAIS ...................................................................................................... 80
4.1 Apresentação do protótipo .............................................................................. 80
4.2 Introdução........................................................................................................ 80
4.3 Descrição do princípio de operação do Simulador ......................................... 82
4.4 Parâmetros obtidos do MIL no Simulador em operação................................. 84

- iii -
4.5 Resultados obtidos do Simulador com o MIL em operação............................ 88
CAPÍTULO V - ESTUDO COMPARATIVO ENTRE O SISTEMA CONVENCIONAL E O SISTEMA PROPOSTO ......................................................................... 91
5.1 Descrição funcional do Sistema Convencional ............................................... 91
5.2 Descrição do sistema utilizando motor de indução linear ............................... 92
5.3 Análise comparativa entre os dois sistemas ................................................... 93
CONCLUSÕES .......................................................................................................... 98
6.1 Considerações sobre o projeto do Simulador ................................................. 98
6.2 Conclusões gerais ........................................................................................... 99
6.3 Proposta para trabalhos futuros .................................................................... 100
REFERÊNCIA BIBLIOGRÁFICA.............................................................................. 102
ANEXO I - PRINCÍPIOS FUNDAMENTAIS DA INDUÇÃO ELÉTROMAGNÉTICA105
ANEXO II - PERDAS NOS MOTORES DE INDUÇÃO LINEARES..........................111
ANEXO III- CAMPO MAGNÉTICO DE TRANSLAÇÃO...........................................119
ANEXO IV- FORMAS DE ONDAS DE CAMPO CARACTERÍSTICAS DOS MILS..130
ANEXO V - FATORES DE ENROLAMENTO PARA MOTORES ............................143
ANEXO VI -CÁLCULO DA FORÇA PROPULSORA ...............................................148
- iv -
LISTA DE FIGURAS
Figura 2.1 - BAGEL Matriz - Fluxograma do processo Armazém 11 até 2002 ........... 6
Figura 2.2 - BAGEL Matriz - Fluxograma do processo Armazém 11 após 2002......... 8
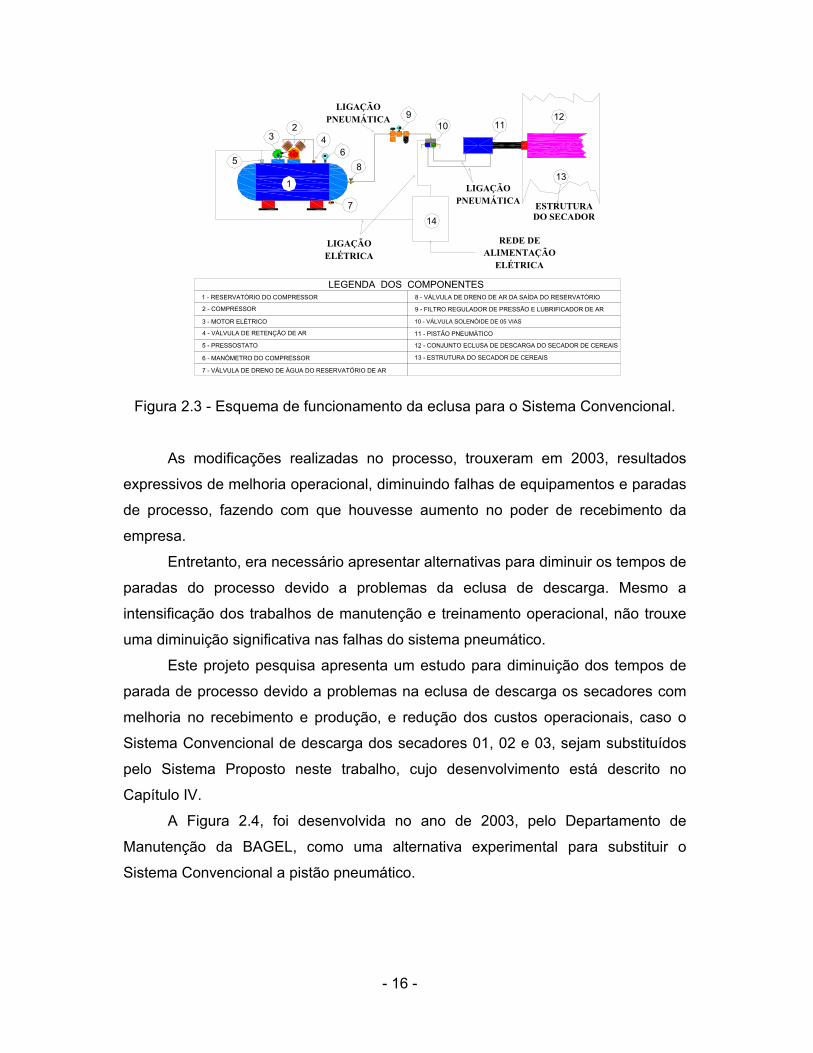
Figura 2.3 - Esquema de funcionamento da eclusa para o Sistema Convencional. . 16
Figura 2.4 - Alternativa de substituição para o Sistema Convencional. .................... 17
Figura 3.1 - “Electropult” construído pela “WESTINGHOUSE”.................................. 18
Figura 3.2 - Veículo ferroviário impulsionado pelo MIL em Shangai na China.......... 19
Figura 3.3 - Modelo de lançador de naves utilizando o MIL proposto pela NASA. ... 20
Figura 3.4 - Classificação geométrica do MIL............................................................ 22
Figura 3.5 - Configurações geométricas dos MIL com chapa linórica....................... 23
Figura 3.6 - Distribuição do campo no entreferro, em vazio, MIL de 3 polos. ........... 24
Figura 3.7 - Distribuição do campo no entreferro, em vazio, MIL de 5 polos. ........... 24
Figura 3.8 - Distribuição do campo no entreferro, em vazio, MIL de 15 polos. ......... 25
Figura 3.9 - Distribuição do campo no entreferro, em vazio, MIL de 2 polos. ........... 25
Figura 3.10 - Transformações de energia do motor elétrico...................................... 29
Figura 3.11 - Distribuição das perdas no motor de indução. ..................................... 30
Figura 3.12 - Modelo equivalente do MIL plano, por fase e por estator. ................... 35
Figura 3.13 - Vista lateral do MIL de dupla face, com estator curto e linor longo ..... 37
Figura 3.14 - Circuitos elétrico e magnético num dispositivo eletromagnético.......... 46
Figura 3.15 - Corte transversal do MIL....................................................................... 49
Figura 3.16 - Vista longitudinal do MIL....................................................................... 53
Figura 3.17 - Motor setorial em arco de 180º............................................................. 53
Figura 3.18 - Laços fictícios praticados no linor em movimento ................................ 53
Figura 3.19 - Circuito equivalente tradicional............................................................. 57
Figura 3.20 - Circuito elétrico equivalente considerando a impedância (ze ) para a
consideração do ELE............................................................................ 59
Figura 3.21 - Força propulsora em função da velocidade obtida através do circuito
elétrico equivalente para o MIL tipo disco. ........................................... 59
Figura 3.22 - Ranhura de estator do motor linear ...................................................... 62
Figura 3.23 - Linhas de corrente sobre a lâmina secundária (linor) .......................... 65
- v -
Figura 3.24 - Comportamento da força propulsora em função do escorregamento
para MILs de (a) baixa velocidade (b) média velocidade e (c) alta
velocidade............................................................................................. 70
Figura 3.25 - Vista geral construtiva do MIL utilizado. ............................................... 74
Figura 3.26 - Enrolamento do estator duplo do MIL utilizado. ................................... 75
Figura 3.27 - Enrolamento trifásico do MIL. ............................................................... 75
Figura 3.28 - Duplo delta dos pacotes primário. ........................................................ 76
Figura 3.29 - Configuração da montagem para ensaios e medições no MIL ............ 77
Figura 3.30 - Ensaio para determinação da força de partida..................................... 78
Figura 4.1 - Detalhes simulador da eclusa de descarga secador de cereais ............ 81
Figura 4.2 - Detalhes da adaptação do MIL na montagem do Simulador. ................ 82
Figura 4.3 - Esquema de funcionamento do Simulador com eclusa fechada ........... 83
Figura 4.4 - Detalhe do acoplamento mecânico entre o linor e a eclusa................... 84
Figura 4.5 - Esquema de funcionamento do Simulador com eclusa aberta. ............. 84
Figura 4.6 - Montagem esquemática para os ensaios ............................................... 85
Figura 4.7 - Forma de onda tensão e corrente, fases A-C ciclo completo. ............... 85
Figura 4.8 - Forma de onda tensão e corrente, fases B-C ciclo completo. ............... 86
Figura 4.9 - Forma de onda tensão e corrente, fases A-C fase intermediária........... 86
Figura 4.10 - Forma de onda tensão e corrente, fases B-C fase intermediária......... 86
Figura 4.11 - Forma de onda de tensão e corrente, fases C-A fase inicial. .............. 87
Figura 4.12 - Forma de onda de tensão e corrente, fases B-C fase inicial. .............. 87
Figura 4.13 - Forma de onda de tensão e corrente, fases C-A fase final.................. 87
Figura 4.14 - Forma de onda de tensão e corrente, fases B-C fase final.................. 88
Figura 4.15 - Fotografia do simulador dentro da oficina mecânica da BAGEL.......... 90
Figura 5.1 - Diagrama elétrico funcional da eclusa no Sistema Convencional.......... 91
Figura 5.2 - Esquema de funcionamento da eclusa utilizado o MIL .......................... 92
Figura 5.3 - Diagrama elétrico funcional de controle eclusa do Sistema Proposto ... 93
Figura 5.5 - Modelo de solicitação de manutenção utilizado na BAGEL................... 94
- vi -
LISTA DE TABELAS
Tabela 2.1 - Relação de equipamentos e capacidade do Armazém 11 – BAGEL...... 5
Tabela 3.1 - Variáveis características das máquinas elétricas .................................. 66
Tabela 3.2 - Resistência do enrolamento primário do pacote A por fase a 35ºC...... 76
Tabela 3.3 - Resistência do enrolamento primário do pacote B por fase a 35ºC...... 76
Tabela 3.4 - Valores das resistências e reatâncias do MIL utilizado......................... 77
Tabela 3.5 - Módulo das tensões e correntes de fase, em condições de carga ....... 78
Tabela 4.1 - Resultados obtidos para o MIL com o Simulador em operação............ 89
Tabela 4.2 - Resultados obtidos para o MIL das medições no Simulador. ............... 89
Tabela 5.1 - Resumo paradas BAGEL – Matriz, Armazém 11 safra 2000/2001....... 94
Tabela 5.2 - Resumo paradas BAGEL – Matriz, Armazém 11 safra 2001/2002....... 95
Tabela 5.3 - Resumo paradas BAGEL – Matriz, Armazém 11 safra 2002/2003....... 95
Tabela 5.4 - Análise comparativa I, Sistema Convencional x Sistema Proposto. ..... 96
Tabela 5.5 - Análise comparativa II, Sistema Convencional x Sistema Proposto. .... 96
Tabela 5.6 - Análise comparativa III, Sistema Convencional x Sistema Proposto. ... 96

- vii -
SIMBOLOGIA UTILIZADA
Br vetor densidade de fluxo magnético
φ vetor fluxo magnético
Dr vetor densidade de fluxo elétrico
Er vetor campo elétrico
Hr vetor intensidade de campo magnético
Jr vetor densidade de corrente 1α comprimento penetração onda de efeito long. extremidade de entrada 2α comprimento penetração onda de efeito long. extremidade de saída
2,1 δδ fases ondas densidade fluxo de extremidade b1 e b2, respectivamente
Sδ fase da onda de densidade de campo b
Xε razão largura do indutor/passo polar
Yε razão aba linor/passo polar θ ângulo entre referenciais de indutor e rotor λ fluxo concatenado
0µ permeabilidade do vácuo
1ρ resistividade volumétrica dos condutores de indutor
cρ resistividade de linor corrigida
rρ resistividade superficial do linor
vρ resistividade volumétrica do linor
ω velocidade angular
rω velocidade angular do rotor
1a distância entre os dentes do indutor
2a largura interna da ranhura do estator b onda de densidade de campo que translada na direção y
1b onda de densidade de fluxo de efeito de extremidade de entrada
2b onda de densidade de fluxo de efeito de extremidade de saída
Sb onda de densidade de fluxo fundamental
1B valor máximo da densidade de campo de extremidade de saída
avB valor médio da densidade de campo magnético
SB valor máximo da onda de densidade de campo na direção y
c largura do indutor 'c largura do linor
RC constante de relação entre as indutâncias de indutor e linor
fd densidade de corrente nos condutores do indutor
fE valor máximo da f.e.m. induzida devida a onda B1
1e f.e.m. instantânea devida a onda B1
SE f.e.m. induzida devida a onda BS
Se f.e.m. instantânea devida a onda BS
ZE campo elétrico na direção z

- viii -
f freqüência da fonte de alimentação
ef fator de empilhamento do bloco indutor
Lf força de carga
xf força propulsora na direção x
xrf força propulsora real
Qe fator de qualidade realístico Q fator de qualidade de Laithwaite
0g entreferro corrigido a partir do fator de Carter
h espessura do linor
521 h,..,h,h dimensões relativas à ranhura do indutor
ch altura da coroa do linor ativo
1I Corrente eficaz de indutor, por fase
max1I Corrente de indutor em seu valor máximo
fmf I,I Corrente que circula por um condutor ativo, valores eficaz e máximo
J Momento de inércia
21 J,J Densidade linear corrente indutor e linor respectivamente (valor eficaz)
21 j,j Densidade linear corrente instantânea indutor e linor respectivamente
m2m1 J,J Densidade linear corrente indutor linor respectivamente(valor de pico)
sms J,J Densidade linear de corrente de um indutor; valores eficaz e máximo
k constante de propagação da onda normal
bk constante de proporcionalidade temporal
ck fator de Carter
ek fator de Gieras para inclusão do efeito longitudinal de extremidade
rk fator de Simone para inclusão do efeito longitudinal de extremidade
Sk fator de inclusão do efeito transversal de borda
wk fator de enrolamento
wek fator de enrolamento para tensão devida a extremidade
L indutância própria
1l comprimento dos condutores de indutor por fase
cbl comprimento de cabeça de bobina
ml comprimento médio de um condutor ativo
M indutância mútua m número de fases
am massa
n velocidade angular em rpm
1N número de espiras por indutor e por fase
fN número de condutores ativos por indutor e por fase
fpN número de espiras por polo e por fase
rN número de espiras de rotor
rmN número de Reynolds magnético

- ix -
sN número de espiras de estator
p número de polos q número de ranhura por polo e por fase
2'R resistência de linor refletida para o indutor
1R resistência do cobre do indutor
mR resistência de perdas do ferro do indutor
rR resistência de rotor
sR resistência de indutor
mℜ relutância magnética
s escorregamento T conjugado t tempo
bτ passo de bobina
eT conjugado eletromagnético
LT conjugado de carga τ passo polar
1τ relação entre os passos polares
bτ passo da bobina do enrolamento do estator
eτ passo polar da onda de efeito de extremidade
ranhurasτ passo polar dado em ranhuras
rxV velocidade do linor
sxV velocidade síncrona do campo de translação
2'X reatância de dispersão de linor refletida para o indutor z,y,x sistema cartesiano de coordenadas
1X reatância de dispersão de indutor
mX reatância de magnetização
eZ impedância de efeito de extremidade
iZ impedância equivalente do ramo de força e magnetização

- 1 -
CAPÍTULO I
INTRODUÇÃO
1.1 Uma contribuição para aplicação de motores lineares em secadores de
cereais
Todos os anos na agricultura ficam evidentes a importância da produção de
cereais assim como o trabalho desenvolvido aplicado no processo de
armazenamento e conservação dos mesmos. Diante de dificuldades encontradas
nesta área, e com a pretensão de melhorar a performance produtiva e diminuir
custos operacionais, foi elaborado um estudo para aplicação dos motores de
indução lineares no sistema de secagem utilizado em secadores de cereais, que
utilizam o sistema de descarga intermitente, com acionamento tipo guilhotina,
utilizados atualmente no país.
No capítulo II é apresentado um estudo e análise da interferência de paradas
de equipamentos no processo de secagem de cereais, com os principais problemas
causadores, fazendo uma breve descrição da reconfiguração dos procedimentos
operacionais e reestruturação do fluxo operacional que envolveram modificações no
sistema mecânico e elétrico, e soluções adotadas para melhoria operacional dos
equipamentos envolvidos no processo de secagem e armazenagem de cereais da
BAGEL – ARMAZÉNS GERAIS BOM JESUS LTDA, empresa voltada ao ramo de
armazenagem de cereais do estado de Goiás, Brasil, .
No capítulo III é feita uma apresentação da teoria que envolve o
funcionamento dos motores de indução lineares, com descrição dos efeitos que
podem comprometer o projeto e a operação, e uma rotina de procedimentos que
envolvem o dimensionamento para o motor de indução linear utilizado como base
de aplicação deste projeto pesquisa.
No capítulo IV é feita uma descrição do princípio de funcionamento do
secador de cereais, com ênfase no controle de acionamento da eclusa de descarga.
Para obtenção de resultados foi projetado e construído um protótipo, que executa o
processo de descarga da eclusa de um secador de cereais, utilizando um motor de
- 2 -
indução linear, em substituição ao Sistema Convencional que utiliza sistema de
acionamento a pistão pneumático.
No capítulo V é feita uma comparação entre o Sistema Convencional
utilizado anteriormente, em relação ao Sistema Proposto em estudo, apresentando
os ganhos de desempenho produtivo, assim como uma análise técnica dos
resultados no custo global obtidos para operação, manutenção e produção com
utilização dos dois sistemas.
Na conclusão no capítulo VI, é apresentada uma análise técnica sobre
características construtivas e operacionais dos motores de indução lineares,
apresentando ganhos operacionais e de produção, alcançando os objetivos
propostos neste trabalho, com conscientização das dificuldades encontradas no
nível de implementação e operação, e apresentando uma visão técnica para
possíveis melhorias a serem implementadas, com possibilidades que se abrem para
outras aplicações.

- 3 -
CAPÍTULO II
ANÁLISE DO SISTEMA DE ARMAZENAGEM DE CEREAIS
2.1 O processo produtivo atual de secagem de cereais
O desenvolvimento de processos de secagem de cereais objetivando o seu
armazenamento para utilização no consumo alimentar vem sendo realizado pelas
empresas fabricantes e utilizadores como pontos de importância cada vez maior
nos itens envolvendo custos de processamento e manutenção do produto. Dizer
que os equipamentos em operação existentes no mercado estão na vanguarda do
desenvolvimento não é propriamente uma verdade, uma vez que o custo de
desenvolvimento para melhoramento tecnológico não atraem as empresas para as
melhorias e alterações de equipamentos necessárias.
Uma das causas deste desestímulo é a sazonalidade da produção, ou seja,
existe somente um período anual propício à produção de cereais no campo, e,
conseqüentemente, somente um período para utilização dos equipamentos
responsáveis pelo processamento do produto para limpeza, secagem e
armazenagem do produto. Este período tem cerca de 45 dias, (há 10 anos atrás
esse período era de 120 dias), e o aumento do volume de produção depende de
investimento em tecnologia, valores financeiramente altos para as empresas
buscarem no mercado para depois serem imobilizados, além do fato de que os
preços dos cereais no mercado internacional têm seguido uma linha oscilante
decrescente, diminuindo o lucro das empresas prestadoras de serviços no ramo de
armazenagem de cereais.
Entretanto como o faturamento da empresa armazenadora depende da
quantidade de cereal armazenado, ela precisa reestruturar o fluxo de produção para
que haja crescimento do seu poder de recebimento, gerando assim a necessidade
do aumento do seu poder de processamento de produto, com conseqüente
aumento do seu poder de armazenagem.

- 4 -
O primeiro problema existente neste processo é a preocupação com a
qualidade do produto a ser armazenado, uma vez que está se processando matéria
prima vinda do campo, a qual possui propriedades e características não favoráveis
ao armazenamento imediato, devendo antes passar por processos de limpeza e
secagem, devido ao fato destes produtos necessitarem de um determinado grau de
pureza e umidade para que sejam conservados “in natura”.
O segundo problema ocorre devido à velocidade que deve ser dada ao
processo de recebimento, limpeza, secagem e armazenamento do produto. As
máquinas que compõem o processo possuem limitações técnicas de produtividade
e por isso o volume de produto está limitado à capacidade de processamento
destas máquinas, que por sua vez estão limitadas ao fluxo constituído pelo caminho
que o produto deve percorrer até ser armazenado. Nem sempre é possível extrair o
máximo da produção de uma máquina instalada, porque muitas vezes o fluxo passa
por estrangulações que limitam a capacidade do processo.
2.2 Soluções aplicadas para diminuir as limitações do processo
Como exemplo, é exposto na Tabela 2.1, os equipamentos que compõem o
caminho do fluxo de cereal recebido, processado e armazenado no Armazém nº.
11, da BAGEL.
A Figura 2.1 mostra o esquema do fluxo do processo existente, no Armazém
11 da BAGEL, unidade Matriz, até o ano de 2002.
Até o ano de 2002 existiam várias limitações no fluxo de grãos desde o
recebimento até a armazenagem final do produto que compreendiam:
• Os transportadores de corrente de recebimento de grãos das moegas
não funcionavam de forma adequada, por problemas de falta de manutenção,
causando limitações de carga por deficiência do equipamento e por falta de
condições de funcionamento devido ao estado precário dos componentes.
• O elevador de alimentação da linha P não atendia ao fluxo de carga
exigido pelas máquinas de pré-limpeza desta linha, fazendo com que as mesmas
trabalhassem sem a quantidade de produto necessária.

- 5 -
• O elevador de alimentação da linha V não atendia ao fluxo de carga
devido às condições precárias de manutenção, ocasionando paradas constantes
por falha nos componentes.
LEGENDA DOS EQUIPAMENTOS CAPACIDADE
CORREIA TRANSPÓRTADORA 04 SUPERIOR PARA ARMAZÉM 11 180 Ton/H
ELEVADOR 09 DE ARMAZENAGEM PARA ARMAZÉM 11 200 Ton/H
CORREIA TRANSPORTADORA 03 DE RECEBIMENTO DO SECADOR 04 PARA ARMAZÉM 11 80 Ton/H
REEDLER 05 DE RECEBIMENTO DO SECADOR 01 PARA ARMAZÉM 11 80 Ton/H
CORREIA TRANSPORTADORA 02 DE RECEBIMENTO DOS SECADORES 02 E 03 PARA ARMAZÉM 11 180 Ton/H
ELEVADOR 05 DE RECEBIMENTO DO SECADOR 04 80 Ton/H
ROSCA DE DESCARGA DO SECADOR 01 60 Ton/H
MESA DE DESCARGA DO SECADOR 01 60 Ton/H
ROSCA DE DESCARGA DO SECADOR 02 60 Ton/H
MESA DE DESCARGA DO SECADOR 02 60 Ton/H
ROSCA DE DESCARGA DO SECADOR 03 60 Ton/H
MESA DE DESCARGA DO SECADOR 03 60 Ton/H
ROSCA DE DESCARGA DO SECADOR 04 65 Ton/H
MESA DE DESCARGA DO SECADOR 04 65 Ton/H
ELEVADOR 03 DE RECEBIMENTO PARA ELEVADORES 04 E 05 DA LINHA SECADOR 04 80 Ton/H
ELEVADOR 04 DE CARREGAMENTO DO SECADOR 04 80 Ton/H
ELEVADOR 06 DE CARREGAMENTO DO SECADOR 01 60 Ton/H
ELEVADOR 07 DE CARREGAMENTO DO SECADOR 02 60 Ton/H
ELEVADOR 08 DE CARREGAMENTO DO SECADOR 03 60 Ton/H
CORREIA TRANSPORTADORA 01 DE RECEBIMENTO PRÉ-LIMPEZAS LINHA P (PL1-PL2-PL3 ) 120 Ton/H
CORREIA TRANSPORTADORA 02 DE RECEBIMENTO PRÉ-LIMPEZAS LINHA V (PL4-PL5-PL6 ) 180 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 01 40 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 02 40 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 03 40 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 04 40 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 05 40 Ton/H
MÁQUINA DE PRÉ-LIMPEZA 06 40 Ton/H
REEDLER 03 DE ALIMENTAÇÃO LINHA P ( PL1-PL2-PL3 ) 180 Ton/H
REEDLER 04 DE ALIMENTAÇÃO LINHA V ( PL4-PL5-PL6 ) 120 Ton/H
ELEVADOR 02 DE RECEBIMENTO DO REEDLER 02 E ALIMENTAÇÃO DO REEDLER 03 LINHA P 80 Ton/H
ELEVADOR 01 DE RECEBIMENTO DO REEDLER 01 E ALIMENTAÇÃO DO REEDLER 04 LINHA V 120 Ton/H
REEDLER 02 RECEBIMENTO MOEGAS, 04 05 06, PARA ELEVADOR 02 200 Ton/H
REEDLER 01 RECEBIMENTO MOEGAS, 01 02 03, PARA ELEVADOR 01 120 Ton/H
ELEVADOR 11 DE ARMAZENAGEM / EXPEDIÇÃO DO ARMAZÉM 11 100 Ton/H
CORREIA TRANSPORTADORA 05 INFERIOR DE EXPEDIÇÃO DO ARMAZÉM 11 100 Ton/H
Tabela 2.1 - Relação de equipamentos e capacidade do Armazém 11 – BAGEL

- 6 -
Figura 2.1 - BAGEL Matriz - Fluxograma do processo Armazém 11 até 2002
- 7 -
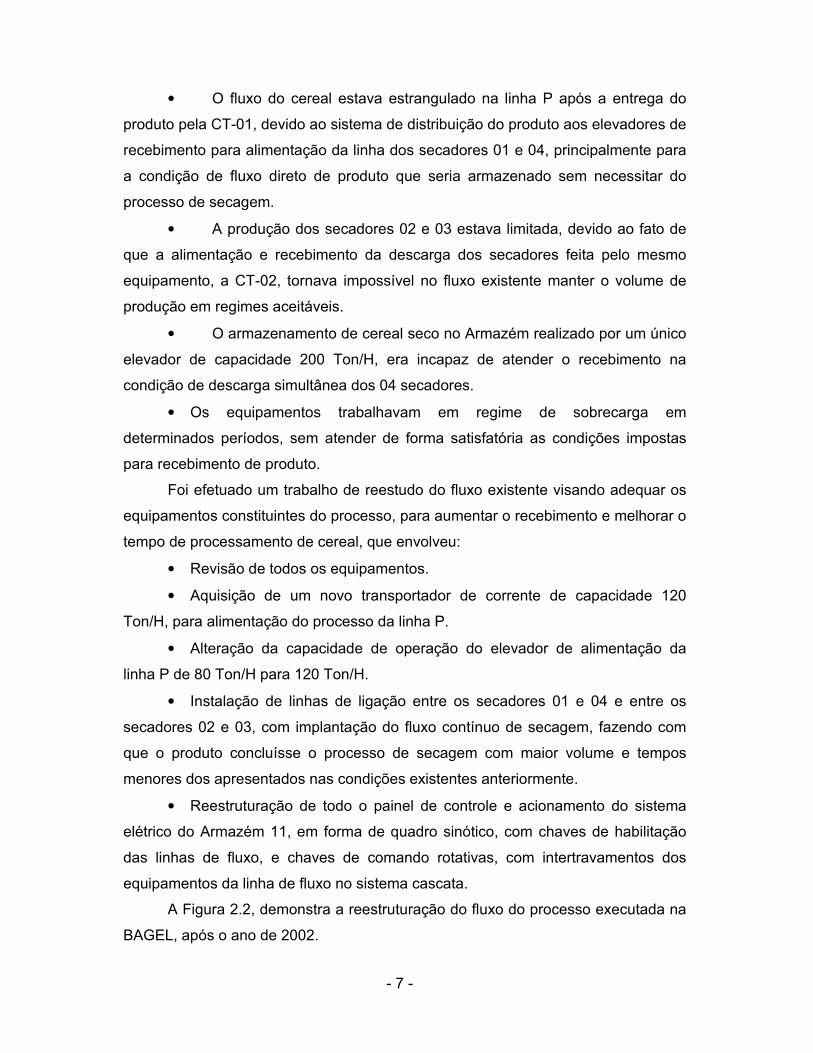
• O fluxo do cereal estava estrangulado na linha P após a entrega do
produto pela CT-01, devido ao sistema de distribuição do produto aos elevadores de
recebimento para alimentação da linha dos secadores 01 e 04, principalmente para
a condição de fluxo direto de produto que seria armazenado sem necessitar do
processo de secagem.
• A produção dos secadores 02 e 03 estava limitada, devido ao fato de
que a alimentação e recebimento da descarga dos secadores feita pelo mesmo
equipamento, a CT-02, tornava impossível no fluxo existente manter o volume de
produção em regimes aceitáveis.
• O armazenamento de cereal seco no Armazém realizado por um único
elevador de capacidade 200 Ton/H, era incapaz de atender o recebimento na
condição de descarga simultânea dos 04 secadores.
• Os equipamentos trabalhavam em regime de sobrecarga em
determinados períodos, sem atender de forma satisfatória as condições impostas
para recebimento de produto.
Foi efetuado um trabalho de reestudo do fluxo existente visando adequar os
equipamentos constituintes do processo, para aumentar o recebimento e melhorar o
tempo de processamento de cereal, que envolveu:
• Revisão de todos os equipamentos.
• Aquisição de um novo transportador de corrente de capacidade 120
Ton/H, para alimentação do processo da linha P.
• Alteração da capacidade de operação do elevador de alimentação da
linha P de 80 Ton/H para 120 Ton/H.
• Instalação de linhas de ligação entre os secadores 01 e 04 e entre os
secadores 02 e 03, com implantação do fluxo contínuo de secagem, fazendo com
que o produto concluísse o processo de secagem com maior volume e tempos
menores dos apresentados nas condições existentes anteriormente.
• Reestruturação de todo o painel de controle e acionamento do sistema
elétrico do Armazém 11, em forma de quadro sinótico, com chaves de habilitação
das linhas de fluxo, e chaves de comando rotativas, com intertravamentos dos
equipamentos da linha de fluxo no sistema cascata.
A Figura 2.2, demonstra a reestruturação do fluxo do processo executada na
BAGEL, após o ano de 2002.

- 8 -
Figura 2.2 - BAGEL Matriz - Fluxograma do processo Armazém 11 após 2002
- 9 -
O desenvolvimento do fluxograma apresentado na Figura 2.2, permitiu que
fosse aprimorado o controle operacional sobre:
• Melhor visualização e melhor controle pelos operadores, nos
procedimentos para composição e definição do tipo de fluxo adotado.
• Viabilização para utilização do elevador de expedição também para a
condição de armazenagem de produto oriundo do processo de fluxo direto ou
descargas dos secadores, através da instalação de linhas de ligação das fitas e
transportador de corrente de recebimento das descargas dos secadores 01, 02, 03
e 04, permitindo que o elevador utilizado somente para armazenagem trabalhasse
com menos carga e conseqüentemente aumentando a sua vida útil.
2.3 Análise do Sistema Convencional
Um dos principais problemas existentes no fluxo do processo nos sistemas
de recebimento, limpeza, secagem e armazenagem está ligado à parada de
equipamentos.
Podem-se definir estas paradas em várias etapas de classificação, definidas
em termos de prioridade, tendo em vista a contribuição das mesmas no volume de
grãos envolvidos no processo de recebimento.
O principal problema da parada é aquele que torna a empresa inoperante em
relação ao recebimento, uma vez que o mesmo está ligado ao setor de produção no
campo, que também sofrerá interrupção, se o local de escoamento da produção
estiver bloqueado.
Estes problemas estão ligados a falhas de equipamentos e componentes,
projetos mal elaborados, defeitos de fabricação, sub ou super dimensionamento de
equipamentos, programas de manutenção inexistentes ou inadequados, sistema de
alimentação de energia elétrica deficientes, falhas operacionais, e várias outras
definições que podem ser descritas.
Observa-se que o produto colhido no campo para ser armazenado, deve ser
processado por um conjunto de equipamentos trabalhando em sincronismo, de
forma que o fluxo do mesmo desde as moegas de recebimento até o galpão de
- 10 -
armazenagem seja o maior possível, para que as condições de entrega dos
fornecedores sejam atendidas.
Qualquer falha de equipamento ou componente que faça parte do fluxo
produtivo pode paralisar completa ou parcial o processo, afetando seriamente a
produção, causando interrupção na rotina normal de funcionamento.
As paradas por falhas no manuseio operacional dos equipamentos que
compõem o caminho do fluxo, são normais e podem afetar seriamente a produção
caso não haja um programa de treinamento do pessoal da área operacional.
As paradas por falhas de equipamentos devido à quebra de máquinas
também podem afetar seriamente a produção, se não houver um programa de
manutenção adequado às necessidades da empresa. É necessário que haja um
programa de manutenção que atenda às reais necessidades da mesma, de forma
que as falhas de equipamentos não afetem significativamente o resultado final.
Deve existir sintonia entre as áreas operacional e manutenção, para que
problemas simples ou complexos possam ser administrados de forma eficiente.
Caso isto não ocorra, talvez um simples terminal prensado de forma incorreta em
um cabo de comando ou um simples parafuso mal apertado, podem gerar grandes
prejuízos até serem reparados.
Para descrição do problema em que se fundamentam os objetivos deste
projeto pesquisa é descrito a forma funcional de um secador de cereais.
Basicamente o secador é composto internamente por um sistema composto
de dois reservatórios, um superior denominado de torre de secagem, e um inferior
denominado de caixa de descarga, com a eclusa sendo o meio de ligação entre
eles. O reservatório superior possui em seu interior, chapas metálicas montadas em
forma de calhas paralelas, que constituem o conjunto de elementos internos da
torre de secagem denominados de colméias. O produto úmido entra pela parte
superior da torre de secagem e desce por gravidade pelo espaço vazio entre as
colméias até preencher todos os espaços existentes. Pela cavidade vazia formada
na parte inferior dos perfis das colméias é aspirado ar quente por um exaustor. O ar
quente funciona como uma “esponja”, retirando umidade da massa de cereal que
passa pela torre de secagem com velocidade controlada pela abertura e
fechamento da eclusa de descarga, e o ciclo de passagem se repete até que o
produto esteja em condições de armazenagem.

- 11 -
Neste trabalho não houve a preocupação de analisar os tipos de secadores
de cereais existentes, com suas vantagens e desvantagens, devido ao fato do
objetivo do mesmo ser buscar uma proposta alternativa para melhoria do fluxo do
sistema de secagem já considerado mais eficiente.
De acordo com vários especialistas no ramo de secagem mecânica de
cereais, o método mais eficiente de secagem é o que utiliza descargas
intermitentes, principalmente os constituídos por sistema tipo guilhotina, por
minimizarem problemas de formação de caminhos preferenciais no fluxo de descida
dos grãos dentro da torre de secagem, durante o processo de secagem forçada.
Estes caminhos preferenciais fazem com que a secagem dos grãos dentro da
torre de secagem não seja feito de forma uniforme, uma vez que a velocidade do
fluxo de grãos na passagem dos mesmos dentro da torre de secagem do secador
não é uniforme em todos os pontos, ocasionando uma perda da qualidade no
produto processado e enviado para a armazenagem.
Com base nestes princípios, um dos problemas de parada que produzia
contribuição direta na produção devido à falha de equipamentos, concentrou-se no
sistema de descarga dos secadores, especificamente na eclusa de descarga dos
secadores 01, 02 e 03 que compõem o sistema de armazenagem do Armazém 11,
da BAGEL, no município de Bom Jesus, estado de Goiás.
A eclusa de descarga destes três secadores é acionada por um conjunto
composto por pistão pneumático, válvula solenóide, filtro regulador de pressão e
lubrificador de ar, alimentados por um compressor de ar. O acionamento do pistão
pneumático é efetuado por um sistema de relés auxiliares controlados por
temporizadores, que fazem o controle do tempo de abertura e fechamento da
eclusa de descarga dos secadores. O que despertou a atenção foi a quantidade de
componentes envolvidos no sistema de acionamento, sendo que cada um deles é
uma fonte potencial de contribuição para a paradas do processo.
Outro fato agravante é que o ar comprimido necessita de um tratamento
adequado, para possibilitar operação uniforme dos equipamentos e maior vida útil
dos componentes. Esta condição não é fácil de ser conseguida, devido ao fato das
condições do ambiente no local de instalação e operação não serem apropriadas.
Toda vez que o sistema de acionamento da eclusa de descarga sofre uma
pane, todo o processo de descarga é comprometido porque:

- 12 -
Se a eclusa parar aberta o volume de grãos que passa por ela provoca
embuchamentos por sobrecarga nos equipamentos que compõem o
sistema de recebimento da descarga.
Se a eclusa parar fechada o volume de grãos dentro da torre do secador
não poderá ser retirado, e isto constitui um problema grave, pois além de
interromper o fluxo de entrada e saída do mesmo, os grãos poderão
sofrer secagem acima dos valores especificados, uma vez que o ar
quente proveniente da fornalha e passando pela massa de grãos, não
pode ser interrompido de imediato devido a lenha estar em processo de
combustão.
Quando se procura verificar o problema que ocasionou o defeito apresenta-
se um leque com várias opções:
• Pistão pneumático.
• Válvula solenóide.
• Filtro lubrificador de ar e regulador de pressão.
• Conjunto do Compressor.
• Sistema de acionamento mecânico de abertura da mesa.
• Pressostato de regulagem da pressão do ar que aciona o pistão
pneumático.
• Sistema de acionamento elétrico do motor e da eclusa.
• Sistema de drenagem e purga de ar do conjunto compressor.
• Sistema de distribuição do ar desde o compressor até o pistão
pneumático.
Cada item mencionado anteriormente contribui com pontos possíveis de
defeito no Sistema Convencional de acionamento da eclusa, descritos
respectivamente como:
• Pistão Pneumático.
Corrosão interna ou deformação do corpo.
Vazamento de ar nas junções do corpo.
Vazamento de ar nas conexões de entrada de ar.
Mau assentamento dos anéis de vedação do ar entre os
conjuntos do êmbolo e do corpo.

- 13 -
Conjunto do kit de reparo do pistão danificado.
Desalinhamento da base de assentamento mecânico.
Desgaste das partes mecânicas.
• Válvula Solenóide.
Falha na alimentação elétrica.
Bobina queimada por sub ou sobretensão.
Corrosão interna ou deformação do corpo.
Vazamento de ar nas junções do corpo.
Vazamento de ar nas conexões de entrada e saída de ar.
Mau assentamento dos anéis de vedação do ar entre os
conjuntos do êmbolo e do corpo.
Conjunto do kit de reparo danificado.
Desalinhamento da base de assentamento mecânico dos
obturadores.
Desgaste das partes mecânicas.
• Filtro lubrificador e regulador de pressão de ar.
Corrosão interna ou deformação do corpo.
Vazamento de ar nas junções do corpo.
Vazamento de ar nas conexões de entrada e saída de ar.
Mau assentamento dos anéis de vedação do ar no conjunto que
compõe os corpos de dreno de água e óleo lubrificante.
Conjunto do kit de reparo do danificado.
Desgaste das partes mecânicas.
• Conjunto do Compressor.
Vazamento de ar nas conexões.
Desgaste das peças que compõem o conjunto compressor.
Mau assentamento do conjunto pistão e biela.
Válvula de retenção de ar do conjunto travada ou danificada.
Fixações mecânicas soltas.
Vazamento de óleo lubrificante do sistema do compressor.
Queima do motor elétrico.
- 14 -
Rolamentos do motor elétrico danificados.
Desgaste da correia de acionamento do compressor.
• Sistema de acionamento mecânico de acionamento da eclusa.
Desgaste mecânico de componentes do conjunto do sistema de
acionamento mecânico.
Ajustes mecânicos no conjunto que compõe o sistema de
abertura e fechamento.
• Pressostato de calibração da pressão do ar do compressor.
Desgaste dos componentes internos.
Conjunto do kit de reparo danificado.
Falha nos ajustes de calibração.
Vazamento de pressão de ar nas conexões.
Desgaste dos contatos elétricos.
• Sistema de acionamento do compressor de ar e da eclusa.
Relés temporizadores com defeito.
Falha nos ajustes de relés de sobrecarga e falta de fase.
Cabos de força e comando rompidos ou com fuga de corrente.
Falha nos ajustes de calibração dos relés temporizadores.
Bobinas de contatores de força ou auxiliares queimadas.
Desgaste dos contatos elétricos de força e comando.
• Sistema de drenagem e purga de ar do conjunto compressor.
Excesso de água no reservatório do compressor.
Problemas de vedação ou limpeza da válvula de drenagem de
ar do reservatório do compressor.
• Sistema de distribuição do ar.
Vazamento na tubulação e conexões de distribuição de ar.
Desgastes por fadiga das mangueiras de distribuição de ar.

- 15 -
2.4 Descrição do Sistema Convencional
Como descrito no item 2.3, o Sistema Convencional que utiliza o conjunto
eletropneumático possui uma grande quantidade de pontos de possibilidades de
geração de defeitos. Muitas vezes os equipamentos estão instalados em locais de
difícil acesso, além do fato de que a correção do defeito deve ser executada por
pessoas especializadas. Assim sendo, um simples anel “O-ring” de borracha do kit
de reparo da válvula solenóide danificado, já é suficiente para causar mau
funcionamento no pistão pneumático, e fazer com que todo o processo seja
interrompido. O mesmo acontece com uma falha nos componentes do motor
elétrico, compressor, pressostato, filtro regulador, pistão pneumático, rede de
distribuição de ar, painel de comando da eclusa, etc.
Essa imensa quantidade de pontos de defeitos obriga as empresas a
possuírem em seus almoxarifados, um conjunto sobressalente constituído de todas
as peças e acessórios que compõem o sistema descrito. Além disso, a empresa se
vê obrigada a colocar uma pessoa treinada especialmente para atender estes
casos, aumentando o custo operacional da empresa.
Como mencionado no item 2.3, a qualidade do ar comprimido é um item que
não pode ser esquecida devido ao fato de que o mesmo deve ter tratamento de
forma conveniente. Quando comprimimos o ar atmosférico ele tende a condensar
água devido ao aumento de pressão, mas, simultaneamente absorve vapor d'água
devido ao aumento de temperatura causado pelo trabalho de compressão. A água
condensada deve ser eliminada em determinados períodos de tempo, que variam
devido às condições do ambiente de instalação, para que não haja contaminação da
linha pneumática e diminuição do desempenho e a vida útil dos equipamentos.
Com o alto índice de defeitos, a empresa vê-se obrigada a realizar altos
investimentos em serviços de manutenção para não correrem o risco de terem
perdas no recebimento de produto por falhas de equipamentos.
A Figura 2.3 apresenta a disposição de equipamentos e o esquema de
ligações do sistema de acionamento da eclusa de descarga do secador utilizando o
Sistema Convencional, constituído por compressor, filtro lubrificador de ar e
regulador de pressão, válvula solenóide, pistão pneumático.
- 16 -
14
7
1
5
32
46
8
910 11
12
13
LIGAÇÃOPNEUMÁTICA
ESTRUTURA DO SECADOR
LIGAÇÃOPNEUMÁTICA
LIGAÇÃOELÉTRICA
REDE DEALIMENTAÇÃO
ELÉTRICA
LEGENDA DOS COMPONENTES1 - RESERVATÓRIO DO COMPRESSOR
2 - COMPRESSOR
3 - MOTOR ELÉTRICO
4 - VÁLVULA DE RETENÇÃO DE AR
5 - PRESSOSTATO
6 - MANÔMETRO DO COMPRESSOR
7 - VÁLVULA DE DRENO DE ÁGUA DO RESERVATÓRIO DE AR
8 - VÁLVULA DE DRENO DE AR DA SAÍDA DO RESERVATÓRIO
9 - FILTRO REGULADOR DE PRESSÃO E LUBRIFICADOR DE AR
10 - VÁLVULA SOLENÓIDE DE 05 VIAS
11 - PISTÃO PNEUMÁTICO
12 - CONJUNTO ECLUSA DE DESCARGA DO SECADOR DE CEREAIS
13 - ESTRUTURA DO SECADOR DE CEREAIS
Figura 2.3 - Esquema de funcionamento da eclusa para o Sistema Convencional.
As modificações realizadas no processo, trouxeram em 2003, resultados
expressivos de melhoria operacional, diminuindo falhas de equipamentos e paradas
de processo, fazendo com que houvesse aumento no poder de recebimento da
empresa.
Entretanto, era necessário apresentar alternativas para diminuir os tempos de
paradas do processo devido a problemas da eclusa de descarga. Mesmo a
intensificação dos trabalhos de manutenção e treinamento operacional, não trouxe
uma diminuição significativa nas falhas do sistema pneumático.
Este projeto pesquisa apresenta um estudo para diminuição dos tempos de
parada de processo devido a problemas na eclusa de descarga os secadores com
melhoria no recebimento e produção, e redução dos custos operacionais, caso o
Sistema Convencional de descarga dos secadores 01, 02 e 03, sejam substituídos
pelo Sistema Proposto neste trabalho, cujo desenvolvimento está descrito no
Capítulo IV.
A Figura 2.4, foi desenvolvida no ano de 2003, pelo Departamento de
Manutenção da BAGEL, como uma alternativa experimental para substituir o
Sistema Convencional a pistão pneumático.

- 17 -
Figura 2.4 - Alternativa de substituição para o Sistema Convencional.
O sistema de acionamento utilizando um motorredutor, apresentado na
Figura 2.4 foi instalado em um secador piloto da BAGEL, em outro local diferente do
apresentado neste trabalho e apresentou uma melhora significativa na diminuição
dos tempos, em relação ao Sistema Convencional, devido a paradas da eclusa de
descarga. Entretanto o mesmo apresenta vários pontos de defeito, principalmente
os componentes mecânicos internos do motorredutor e do sistema de redução
auxiliar, que podem ser descritos como:
• Vazamento de óleo do redutor por danos aos retentores.
• Danos excessivos aos rolamentos do eixo de saída do redutor.
• Sinais de fadiga no sistema de engrenamento interno do redutor.
• Danos na correia de transmissão do movimento do redutor ao
sistema de redução secundária.
• Danos na articulação do volante de transmissão de movimento e o
braço mecânico de acoplamento a eclusa.
• Desalinhamento excessivo do braço de acoplamento a eclusa.
• Dificuldade em estabelecer um ponto para instalação e ajuste do
fim de curso para ajuste do curso mecânico da eclusa.
- 18 -
CAPÍTULO III
O MOTOR DE INDUÇÃO LINEAR
3.1 O motor de indução linear
O primeiro conceito de um motor linear elétrico tem mais de 150 anos. O
primeiro motor linear foi patenteado em 1841 por Wheatstone. O primeiro motor de
indução linear, MIL, foi patenteado em 1890. Muitas das patentes que se seguiram
foram utilizadas para propulsão na indústria têxtil, isto entre 1895 e 1940. Em 1905
foram propostos dois projetos de tração onde se utilizavam MIL. Em 1923, foi
apresentado, em Nova York, um passeio rolante acionado por um MIL, o qual ligava
o “Grande Central Terminal” à “Times Square Garden”. Em 1945 a “WestingHouse
Company of America” construiu um MIL, o qual foi utilizado para acelerar aviões na
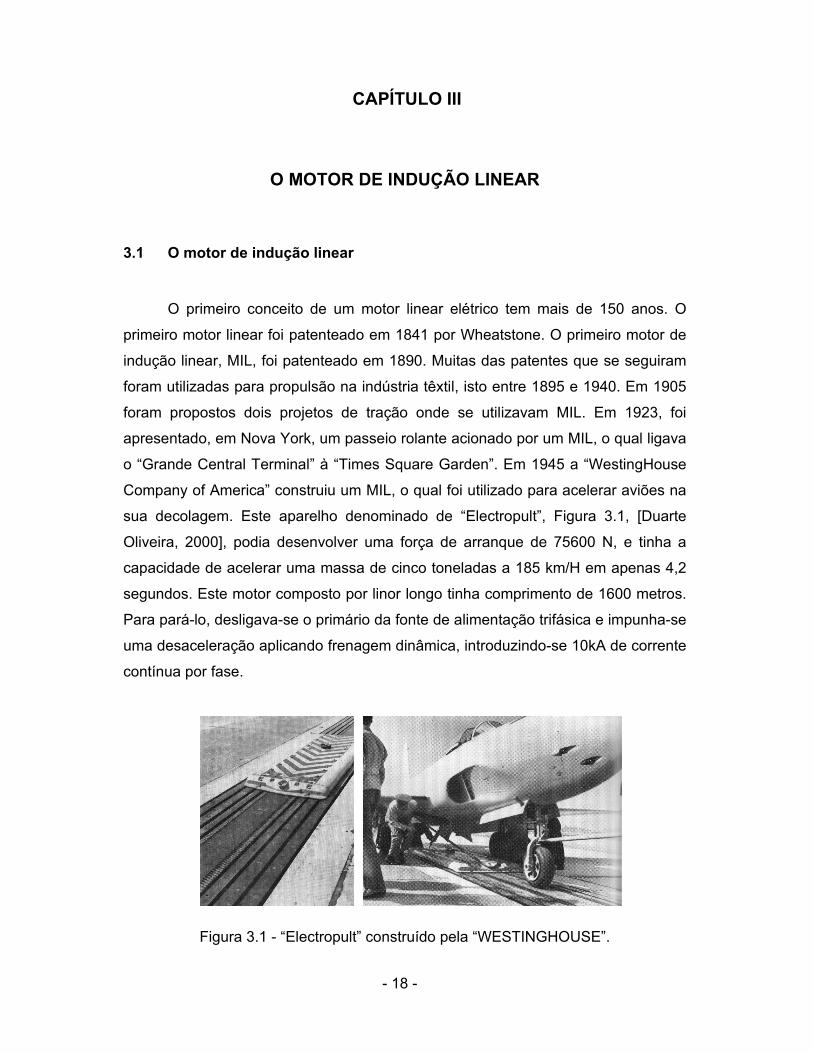
sua decolagem. Este aparelho denominado de “Electropult”, Figura 3.1, [Duarte
Oliveira, 2000], podia desenvolver uma força de arranque de 75600 N, e tinha a
capacidade de acelerar uma massa de cinco toneladas a 185 km/H em apenas 4,2
segundos. Este motor composto por linor longo tinha comprimento de 1600 metros.
Para pará-lo, desligava-se o primário da fonte de alimentação trifásica e impunha-se
uma desaceleração aplicando frenagem dinâmica, introduzindo-se 10kA de corrente
contínua por fase.
Figura 3.1 - “Electropult” construído pela “WESTINGHOUSE”.
- 19 -
Os progressos na construção de reatores nucleares exigiam bombas
eficientes para metais líquidos tais como o sódio, sódio-potássio, etc. Nos finais dos
anos 50, foram desenhadas as primeiras bombas de indução para metais líquidos.
Já no início dos anos 60, foram construídos vários dispositivos para simulação de
colisões de automóveis. Estes dispositivos eram responsáveis pela aceleração do
automóvel, executando-se nessa altura testes de colisão à velocidade de 100km/h,
[Duarte Oliveira, 2000].
Uma das áreas de maior aplicação do MIL é em sistemas de transporte de
alta velocidade, sistemas esses denominados de sistemas de levitação magnética.
O Japão tem construído protótipos capazes de atingir velocidades elevadas desde
os anos 70, [Duarte Oliveira, 2000].
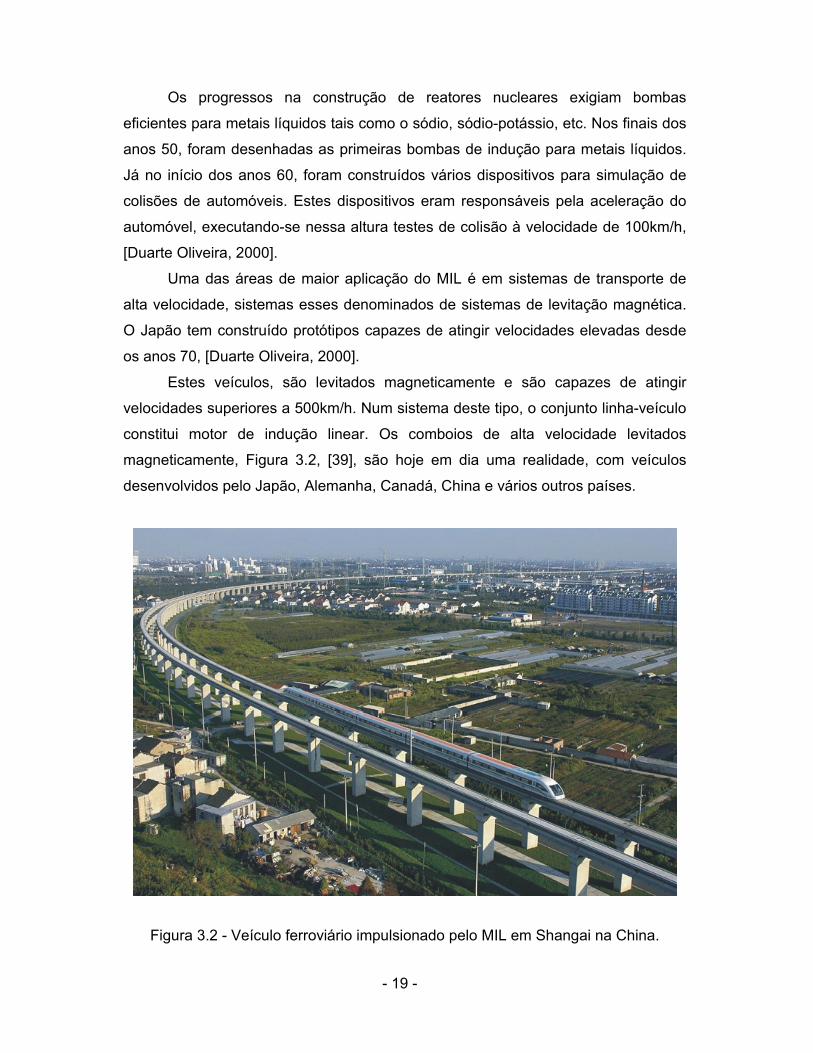
Estes veículos, são levitados magneticamente e são capazes de atingir
velocidades superiores a 500km/h. Num sistema deste tipo, o conjunto linha-veículo
constitui motor de indução linear. Os comboios de alta velocidade levitados
magneticamente, Figura 3.2, [39], são hoje em dia uma realidade, com veículos
desenvolvidos pelo Japão, Alemanha, Canadá, China e vários outros países.
Figura 3.2 - Veículo ferroviário impulsionado pelo MIL em Shangai na China.

- 20 -
A tecnologia do emprego dos materiais supercondutores faz com que haja
aumento na área de equipamentos acionados por motores lineares, e isto poderá
ser uma aplicação futura nos acionamentos. A Figura 3.3, [38], apresenta uma
proposta da NASA, para auxílio nos estudos dos futuros projetos aeroespaciais.
Figura 3.3 - Modelo de lançador de naves utilizando o MIL proposto pela NASA.
3.2 Princípio de funcionamento do MIL
O princípio de funcionamento do motor de indução linear, MIL, baseia-se na
interação entre um campo magnético viajante em condutores adequadamente
dispostos no espaço, com uma peça condutora. Se o elemento gerador do campo
se encontrar fixo no espaço haverá deslocamento da peça condutora.
- 21 -
Inversamente, se a peça condutora se encontrar fixada, haverá deslocamento do
elemento gerador de campo. Isto significa que podemos ter um MIL com diferentes
formas de deslocamento. Movimento por deslocamento do elemento gerador de
campo ou deslocamento da chapa rotórica, nesse caso denominada de chapa
linórica, devido ao seu movimento linear.
O rotor por ser plano, agora denominado de linor, e o estator, ficam
separados por um entreferro, que possibilita a sua variação, de forma de aumentar
ou diminuir a velocidade de deslizamento do linor. O campo girante é transformado
num campo que se propaga em sentido linear, agora denominado de campo
transladante, e a (fmm), em vez de transmitir um impulso mecânico que faz girar o
motor, exerce uma força de sentido linear que desloca a armadura. O estator é o
circuito primário e o linor o secundário. O secundário de um MIL, é constituído por
um material com alta condutividade elétrica e de permeabilidade paramagnética,
tipicamente uma chapa de alumínio ou cobre, (opta-se normalmente por alumínio
por razões econômicas).
No Anexo I, foi feita uma breve descrição dos princípios da levitação
magnética com a descrição da experiência do “anel saltador” para ilustrar alguns
dos princípios fundamentais da indução eletromagnética, aplicados ao
funcionamento do motor de indução linear, com a geração de forças
magnetomotrizes de componentes vertical (levitação), lateral (estabilização) e
longitudinal (propulsora devido ao campo transladante), resultando assim num
sistema de translação eletromagnética sem qualquer contato mecânico, cuja
velocidade depende do passo polar e da sua freqüência de alimentação.
3.3 Classificação quanto ao uso
Dependendo da forma de funcionamento e características construtivas, os
motores de indução lineares são classificados em três categorias diferentes de
acordo com o seu propósito de utilização:
• Máquina de potência – Os MILs de potência são motores que devem
desenvolver uma potência elevada e uma velocidade também elevada com a
menor quantidade de perdas. Estes motores são geralmente destinados a

- 22 -
tração elétrica. O seu rendimento é definido como sendo a potência
mecânica desenvolvida por unidade de potência elétrica consumida.
• Máquinas de energia – Este tipo de máquinas tem por finalidade fornecer
elevadas energias cinéticas em pequenos intervalos de tempo e espaços. A
eficiência das máquinas de energia é definida como sendo a energia cinética
desenvolvida por unidade de potência elétrica consumida. Estes tipos de
máquinas são basicamente utilizados com aceleradores cinéticos, onde o
famoso “Electropult”, Figura 3.1, representa um deste tipo de máquina.
• Máquinas de força – As máquinas de força são essencialmente vistos como
acionamentos de baixa velocidade. A eficiência deste tipo de máquinas é
definida como a força mecânica que produzem por unidade de potência
consumida.
3.4 Classificação quanto a geometria
Os MIL podem ser classificados de várias maneiras distintas. A Figura 3.4
apresenta uma classificação geométrica dos diferentes tipos de MIL.
ESTATOR CURTO
ESTATOR MÓVEL LINOR MÓVEL
LINOR CURTO
ESTATOR DUPLO ESTATOR SIMPLES
ESTATOR SIMPLES COMCIRCUITO MAGNÉTICO
MIL COM LINOR EMFORMA DE CHAPA
Figura 3.4 - Classificação geométrica do MIL.
O MIL pode ser classificado em estator curto ou longo e linor curto ou longo,
quanto aos comprimentos dos circuitos primário e secundário.
- 23 -
Para que uma das partes se mova, a outra terá que ser fixa. Este é mais um
atributo que classifica o MIL em estator móvel ou linor móvel.
Quanto ao número de estatores, o MIL pode ser classificado em estator
simples ou estator duplo. Os MILs de estator simples podem ser apresentados com
o linor constituído por um material paramagnético de alta condutividade elétrica, ou
constituído pela associação do mesmo com um material ferromagnético, sob a
influência do estator de modo que o fluxo magnético faça um caminho fechado por
ele, diminuindo a dispersão das linhas de fluxo.
O MIL de estator duplo é constituído por dois estatores, com o linor
posicionado entre eles. É importante referir que neste tipo de motor a sua força
mecânica é aproximadamente proporcional ao quadrado da corrente de alimentação
do estator. Isto significa que, sem saturação magnética, a força desenvolvida por
um MIL de estator duplo tem um valor aproximadamente quatro vezes superior à
força desenvolvida por um MIL de estator simples, levando em consideração que a
corrente de alimentação de um MIL de estator duplo é o dobro da corrente de
alimentação de um MIL de estator simples.
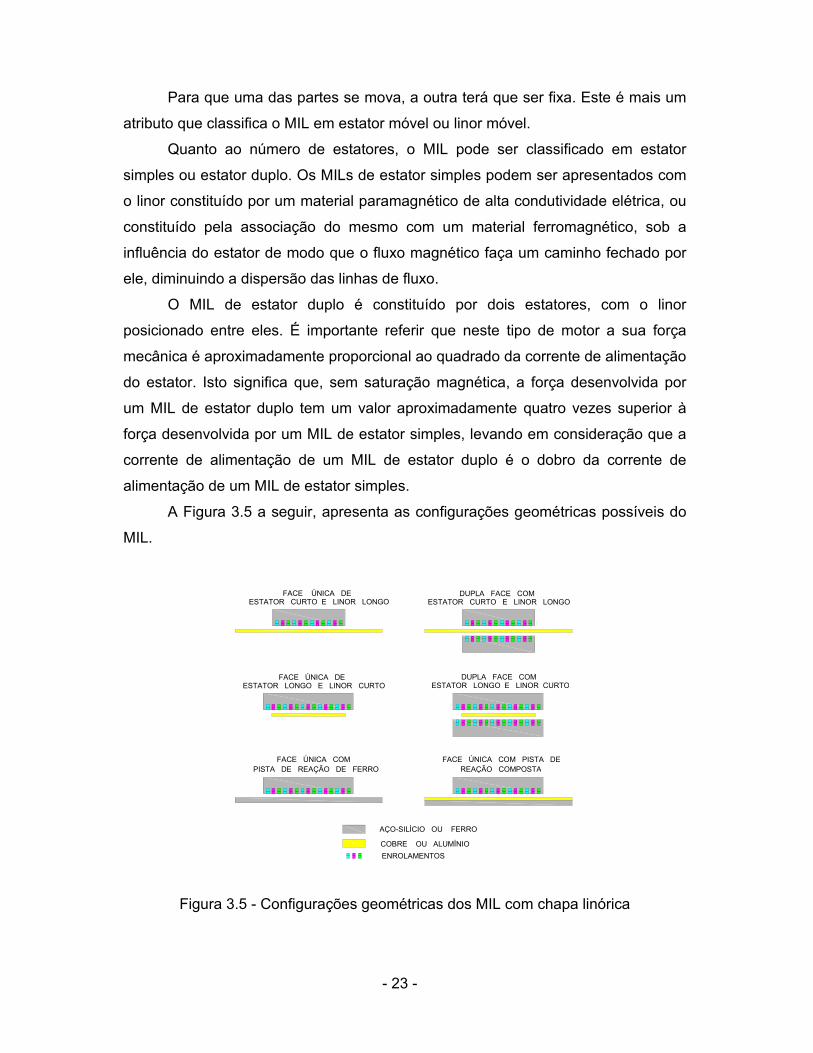
A Figura 3.5 a seguir, apresenta as configurações geométricas possíveis do
MIL.
Figura 3.5 - Configurações geométricas dos MIL com chapa linórica
DUPLA FACE COM ESTATOR CURTO E LINOR LONGO
DUPLA FACE COM ESTATOR LONGO E LINOR CURTO
FACE ÚNICA COM PISTA DE REAÇÃO COMPOSTA
FACE ÚNICA COMPISTA DE REAÇÃO DE FERRO
FACE ÚNICA DEESTATOR CURTO E LINOR LONGO
FACE ÚNICA DEESTATOR LONGO E LINOR CURTO
AÇO-SILÍCIO OU FERRO COBRE OU ALUMÍNIO ENROLAMENTOS

- 24 -
3.5 Formas de onda de campo características do MIL
A distribuição do fluxo magnético no entreferro não é uniforme, tal como
nas máquinas rotativas. Nas Figuras 3.6 a 3.9 [Duarte Oliveira, 2000], são
apresentadas as formas de onda de MILs que podem ter número de polos pares ou
ímpares, cujo desenvolvimento teórico está descrito no Anexo IV.
Figura 3.6 - Distribuição do campo no entreferro, em vazio, MIL de 3 polos.
Figura 3.7 - Distribuição do campo no entreferro, em vazio, MIL de 5 polos.
- 25 -
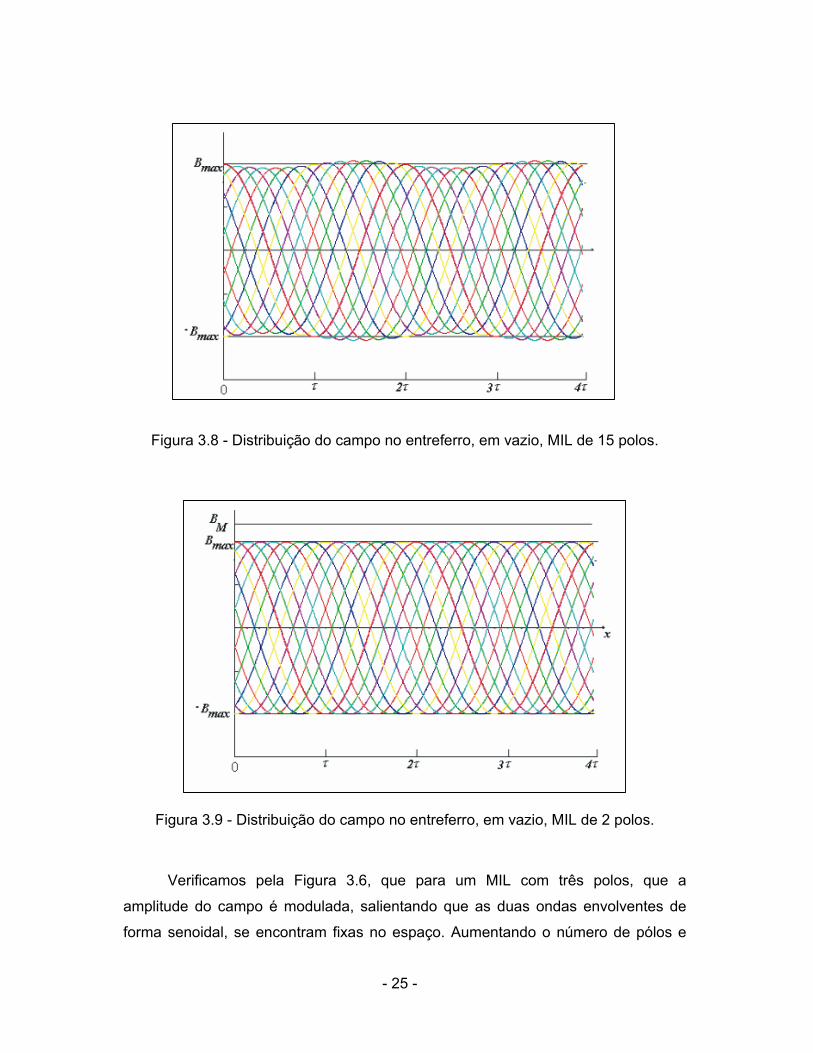
Figura 3.8 - Distribuição do campo no entreferro, em vazio, MIL de 15 polos.
Figura 3.9 - Distribuição do campo no entreferro, em vazio, MIL de 2 polos.
Verificamos pela Figura 3.6, que para um MIL com três polos, que a
amplitude do campo é modulada, salientando que as duas ondas envolventes de
forma senoidal, se encontram fixas no espaço. Aumentando o número de pólos e
- 26 -
mantendo o passo polar, ou seja, aumentando o comprimento longitudinal da
máquina, o campo passa a ser cada vez menos modulado. Para uma máquina com
15 pólos, a modulação do campo no espaço já é desprezível, tal como pode ser
verificado na Figura 3.8.
No MIL com um número par de pólos, a amplitude do campo ao longo do
entreferro não é modulada. Caso a máquina possuísse mais pólos tudo seria da
mesma forma.
Por este aspecto, é conveniente trabalhar em máquinas que tenham número
par de pólos, para que o campo ao longo do entreferro seja o mais uniforme
possível, caso contrário o linor pode apresentar vibrações, as quais devem ser
reduzidas ao mínimo possível.
3.6 Características dos motores de indução lineares
Os motores de indução lineares possuem características operacionais e
construtivas que são descritas a seguir:
• Os motores de indução rotativos e os lineares são fisicamente diferentes,
de modo que existem simetrias características das máquinas rotativas
que não se encontram no MIL. Sendo assim, a distribuição do fluxo
magnético em todo o seu entreferro não é uniforme, como nas
máquinas rotativas. Consequentemente, o valor eficaz da densidade de
fluxo ao longo do entreferro é modulada de acordo com o
escorregamento do motor [Anexo IV].
• Na máquina rotativa o número de passos polares em todo o perímetro da
máquina é sempre um número par. No MIL o número de passos polares
pode ser par ou ímpar.
• No motor rotativo assume-se que s ó existe um único campo girante no
estator, desprezando as harmônicas que não têm uma influência
expressiva. No MIL existe mais que um campo no entreferro. No MIL de
linor longo, existem sempre duas ondas de campo de translação
expressivas. Uma com velocidade síncrona e a outra que depende da
velocidade do linor.

- 27 -
• Na operação em regime permanente, o motor de indução rotativo produz
fluxo de potência de forma que o binário da máquina não sofre variações
bruscas. No MIL, tanto o fluxo de potência como a força desenvolvida
podem sofrer variações no tempo.
• No MIL o fluxo magnético não se fecha por todo o estator tal como
acontece na máquina rotativa. Este fato introduz perdas adicionais.
• No motor rotativo, os enrolamentos do estator podem ser ligados em
série ou em paralelo, não havendo diferenças significativas entre as duas
ligações. No MIL, a ligação em série é utilizada na configuração de linor
longo. A ligação em paralelo é utilizada em MIL de estator longo onde
existem muitas bobinas por fase, e caso fosse executada a ligação série,
o valor de tensão aplicada a cada enrolamento seria muito baixo.
• Os MILs apresentam baixos rendimento e fator de potência quando
comparados com sua contrapartida rotativa [Thé Pontes, 2003].
• Nos MILs, com exceção dos motores de disco, com construção mais
robusta e mais simples que a máquina rotativa, requerem rolamentos e
mancais como base de apoio de sustentação mecânica das partes
móveis, não absorvendo da mesma forma que nas máquinas rotativas,
os esforços mecânicos resultantes da transmissão do movimento,
apresentando assim menores possibilidades de desgastes mecânicos, o
que reduz sua manutenção e aumenta a confiabilidade.
• Dependendo da aplicação, os MILs evitam nas inversões de movimento,
as folgas de engrenamentos, os fusos de esferas e as compressões e
elasticidade variáveis em função do equipamento envolvido.
• Pelo fato dos MILs apresentarem uma geometria mais simples, a
dissipação do calor é maior e mais rápida, o que permite o seu
dimensionamento com densidades de corrente estatóricas mais
elevadas.
• Nos MILs devido a sua forma geométrica e característica de
funcionamento, permitem que a transmissão de potência mecânica aos
equipamentos seja feito de forma direta ou acoplados por mecanismos
menos complexos.

- 28 -
• O tipo de projeto, geometria, característica de operação, com a ligação
entre o elemento fixo e o elemento móvel ser efetuada unicamente
através de um campo magnético, permite que os MILs sejam utilizados
em acionamentos de sistemas com levitação magnética, [Anexo I].
• Devido a sua característica construtiva e funcionamento as composições
ferroviárias acionadas por MILs apresentam menor altura em relação aos
trilhos, reduzindo a altura total dos mesmos e aumentando a sua
estabilidade.
• Pelo fato da altura ser menor os diâmetros construtivos dos túneis para
as máquinas ferroviárias acionadas por MILs também são menores,
gerando economia de tempo, material e mão de obra na construção.
• Nos MILs a quase inexistência de acoplamentos mecânicos
intermediários diminui os problemas inerciais, reduzindo os tempos de
aceleração e desaceleração, melhorando o fluxo do funcionamento,
observando-se o tipo de aplicação.
• Os custos de produção dos MILs são menores dos que os motores de
indução rotativos, permitindo normalizar pequenas gamas de fabricação
na medida em que, para se conseguirem maiores forças de tração,
permite que se faça associação geométrica e elétrica de várias unidades.
• Os MILs admitem diferentes formas construtivas, que podem ser
selecionadas de acordo com o tipo e características de cada aplicação.
• Os MILs praticamente suprimem o atrito, as vibrações e a poluição
sonora.
• Neste trabalho de aplicação o MIL apresenta baixo consumo de energia,
uma vez que o seu funcionamento é realizado por pulsos de tensão e
corrente em pequenos intervalos de tempo.
3.7 Perdas nos motores de indução lineares
O motor elétrico é um conversor de energia que transforma a energia elétrica
fornecida em energia mecânica com um percentual de perdas.

- 29 -
A Figura 3.10, apresenta um diagrama esquemático das transformações de
energia que ocorrem em um motor elétrico.
Figura 3.10 - Transformações de energia do motor elétrico.
As perdas inerentes ao processo de transformação, são quantificadas
através do rendimento.
(%)P
P
el
mec=η (3.1)
Onde (η ) apresenta o rendimento do motor, (Pmec) a potência mecânica
transferida pelo motor e (Pel) a potência elétrica fornecida ao motor.
As perdas que ocorrem num motor dividem-se em quatro diferentes tipos:
Perdas elétricas:
As perdas elétricas nos condutores são do tipo (RI2) e aumentam
acentuadamente com a carga aplicada ao motor. Estas perdas, por efeito de
Joule podem ser reduzidas, aumentando a seção dos condutores do estator e do
linor.
Perdas magnéticas:
As perdas magnéticas ocorrem nas lâminas de ferro do estator e do linor.
Ocorrem devido ao efeito de histerese e às correntes induzidas de Foucault, e
variam com a densidade do fluxo e a freqüência.
Perdas mecânicas:
As perdas mecânicas são devido ao atrito de ventilação devido à
oposição do ar. Podem ser reduzidas, usando técnicas de diminuição do atrito e
melhoria do sistema de ventilação.
POTENCIAELÉTRICA
POTENCIAMECÂNICA
PERDAS
MOTORELÉTRICO

- 30 -
Perdas parasitas:
As perdas parasitas são devidas a fugas do fluxo, distribuição de corrente
não uniforme, imperfeições mecânicas nas aberturas para escoamento do ar, e
irregularidades na densidade do fluxo do ar que flui pelas aberturas. Podem ser
reduzidas através da otimização do projeto do motor.
A Figura 3.11 apresenta a distribuição das perdas no motor de indução
rotativo. As perdas parasitas não são representadas por terem um valor
insignificante.
Figura 3.11 - Distribuição das perdas no motor de indução.
O MIL trifásico apresenta perdas por efeito de Joule nos condutores elétricos,
perdas por correntes de Foucault e perdas devido à histerese magnética, ou seja:
HistereseFoucaultJouleMIL PPPP ++= (3.2)
Onde ( MILP ) é a perda total do MIL, ( JouleP ) as perdas por aquecimento
dos condutores do estator e do linor, ( FoucaultP ) as perdas no núcleo de ferro do

- 31 -
estator e do linor pelas correntes induzidas de Foucault e ( HistereseP ) as perdas por
histerese do núcleo de ferro do estator e do linor.
Entretanto como no MIL a característica de funcionamento faz com que os
esforços mecânicos nos rolamentos e mancais na maioria dos casos são menores
que os dos rotativos, as perdas por atrito proveniente dos mesmos são menores, e
dependendo do tipo de aplicação podem até serem desprezadas.
Uma descrição mais detalhada sobre as perdas no MIL está apresentada no
Anexo III.
3.8 Campo magnético de translação
No MIL trifásico, os enrolamentos do estator geram um campo pulsante que
evolui ao longo do tempo. Este campo é semelhante ao produzido pelo estator de
um motor convencional. Neste caso, como o movimento do motor é linear e não
circular, o campo é designado de transladante em vez de girante.
A corrente (I) constante no tempo, considerando uma distribuição senoidal de
enrolamentos no espaço, gera um campo magnético de distribuição constante no
tempo, mas variável no espaço, ao longo do entreferro, e é dados em (Wb) da
seguinte forma:
xBxB .cos.)( maxτ
π= (3.3)
Onde (B(x)) é o campo magnético distribuído ao longo do entreferro, (Bmax) é a
densidade máxima de campo magnético dado em (Wb), (τ) é o passo polar (igual ao
passo da bobina) dado em (m), (x) é a distância de deslocamento do campo
magnético, dado em (m). Como a corrente (i) dada em (A) é alternada senoidal,
gera uma onda de campo variável no espaço e no tempo e escrita da forma:
xtsenBtxB m .cos)..(.),(τ
πω= (3.4)

- 32 -
Onde mm IKB .= é a intensidade máxima do campo de indução magnética,
dado em (Wb), (Im) o valor máximo da corrente em (A), (ω) a velocidade angular do
campo magnético em (rad/s).
Como o MIL é trifásico, ao invés de um enrolamento, temos três
enrolamentos iguais e defasados no espaço de 120º, atravessados cada um por um
sistema trifásico de correntes, tais que:
)º120.(.
)º120.(.
..
3
2
1
+=
−=
=
tsenII
tsenII
tsenII
m
m
m
ω
ω
ω
(3.5)
Onde (I1), (I2) e (i3) são as ondas das correntes em (A) de cada fase que
compõem o sistema trifásico.
São criados três campos pulsantes variáveis no espaço e no tempo, e com
as transformações matemáticas descritas no Anexo III, teremos estes três campos
dados por:
)..(.2
)º240..(.2
),(
)..(.2
)º240..(.2
),(
)..(.2
)..(.2
),(
3
2
1
xtsenB
xtsenB
txB
xtsenB
xtsenB
txB
xtsenB
xtsenB
txB
mm
mm
mm
τ
πω
τ
πω
τ
πω
τ
πω
τ
πω
τ
πω
−+++=
−+−+=
−++=
(3.6)
A onda resultante corresponde à soma destas três ondas pulsantes, ou seja:
)..(.2
3),(),(),(),( 321 xtsenBtxBtxBtxBtxB m
τ
πω −=++= (3.7)
A onda resultante é uma onda girante com uma amplitude constante de valor
mB2
3 e uma velocidade em (m/s) dada por:
f..VS τ2= (3.8)
O Anexo III apresenta a evolução do campo transladante de um MIL de oito
polos durante doze instantes de tempo, correspondendo a um período completo.
Mostra também a disposição e sentidos das correntes do sistema trifásico que dão
origem ao campo transladante no estator trifásico do MIL. Neste desenvolvimento

- 33 -
não foram incluídos os efeitos transversal de borda e longitudinal de extremidade
que serão apresentados em itens específicos mais adiante.
O campo transladante desloca-se com uma velocidade (Vsx) através do
estator. Se este campo for aplicado a uma máquina rotativa, então a sua velocidade
em (m/s) será dada por:
f..Vsx τ2= (3.9)
Conclui-se então que a velocidade do campo girante é proporcional ao passo
polar do estator trifásico e à freqüência de alimentação. Esta é a velocidade do
campo magnético de translação no estator do MIL, e é denominada de velocidade
síncrona. Na realidade, o linor não se move a esta velocidade, mas a uma
velocidade inferior (Vrx), que é dada em (m/s) por:
)s.(f..Vrx −= 12τ (3.10)
Onde (s), é o escorregamento ou deslizamento do linor e é definido por:
sx
rxsx
V
VVs
−= (3.11)
Concluindo, podemos dizer que a velocidade do linor pode ser controlada
através da freqüência de alimentação, ou pelo comprimento do passo polar.
O sentido de translação do campo, que determina o sentido de translação do
linor através do estator, depende da seqüência das tensões e das ligações das três
fases, que na prática poderá ser invertido, invertendo as ligações de duas fases
quaisquer do estator com a linha de alimentação.
3.9 Elementos fundamentais no estudo das máquinas de indução trifásicas
lineares
No desenvolvimento do projeto de uma máquina de indução linear, vários
aspectos devem ser considerados, para que se possa ter uma aproximação mais
próxima do real no resultado final.

- 34 -
Tais aspectos influenciam na máquina de indução linear na quantificação da
força propulsora, e são efeitos que podem ser definidos [Simone, 1996] como:
Efeito da presença de ranhuras, ou Fator de Carter.
Efeito da Dispersão de Fluxo.
Efeito Pelicular.
Efeito Longitudinal de Extremidade.
Efeito Transversal de Borda, ou Fator de Russell.
Empilhamento de Chapas.
Fator de enrolamento.
Todos os efeitos influenciam no desempenho da máquina de indução linear,
desde o rendimento ao fator de potência.
Como já mencionado anteriormente, a máquina de indução rotativa dotada
de rotor em caneca ou gaiola de esquilo é um caso particular da máquina de
indução linear. Dentro desta visão, as equações utilizadas no projeto das máquinas
de indução rotativas, gaiola de esquilo ou canecas, podem ser aplicadas no
desenvolvimento das máquinas de indução lineares, exceto para a condição dos
casos em que são levados em conta os efeitos, Transversal de Borda e Longitudinal
de Extremidade.
3.10 Circuito equivalente do motor de indução linear
O MIL plano pode ser representado por um circuito equivalente, por fase e
por estator, semelhante ao utilizado para representar o motor de indução rotativo
convencional. O circuito equivalente está representado na Figura 3.12.
Os parâmetros apresentados no circuito são:
R1 - Resistência elétrica de perdas, que representa a resistência dos enrolamentos
do estator, por fase.
X1 - Reatância de fugas do estator, por fase. Este reatância representa o fluxo
magnético de dispersão do estator. Este fluxo não atravessa o linor, influencia nas
perdas na medida em que muda a tensão do ramo magnetizante e a corrente de
entrada do estator.
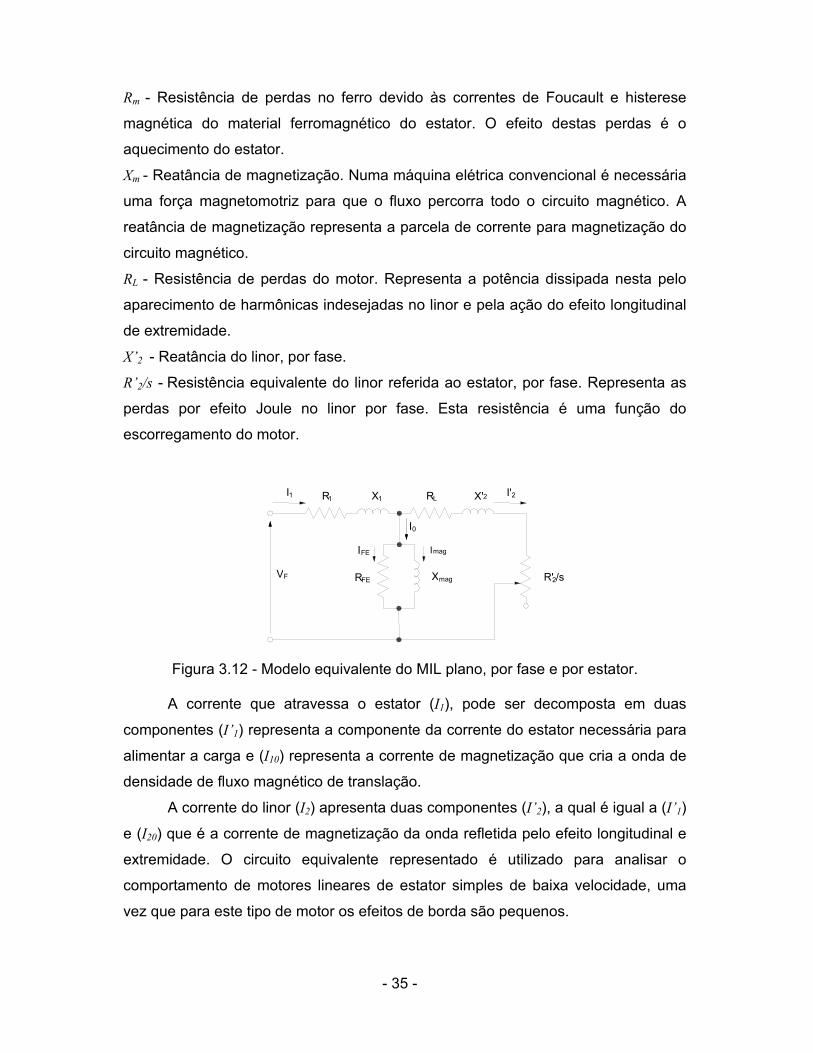
- 35 -
Rm - Resistência de perdas no ferro devido às correntes de Foucault e histerese
magnética do material ferromagnético do estator. O efeito destas perdas é o
aquecimento do estator.
Xm - Reatância de magnetização. Numa máquina elétrica convencional é necessária
uma força magnetomotriz para que o fluxo percorra todo o circuito magnético. A
reatância de magnetização representa a parcela de corrente para magnetização do
circuito magnético.
RL - Resistência de perdas do motor. Representa a potência dissipada nesta pelo
aparecimento de harmônicas indesejadas no linor e pela ação do efeito longitudinal
de extremidade.
X’2 - Reatância do linor, por fase.
R’2/s - Resistência equivalente do linor referida ao estator, por fase. Representa as
perdas por efeito Joule no linor por fase. Esta resistência é uma função do
escorregamento do motor.
Figura 3.12 - Modelo equivalente do MIL plano, por fase e por estator.
A corrente que atravessa o estator (I1), pode ser decomposta em duas
componentes (I’1) representa a componente da corrente do estator necessária para
alimentar a carga e (I10) representa a corrente de magnetização que cria a onda de
densidade de fluxo magnético de translação.
A corrente do linor (I2) apresenta duas componentes (I’2), a qual é igual a (I’1)
e (I20) que é a corrente de magnetização da onda refletida pelo efeito longitudinal e
extremidade. O circuito equivalente representado é utilizado para analisar o
comportamento de motores lineares de estator simples de baixa velocidade, uma
vez que para este tipo de motor os efeitos de borda são pequenos.
I 1 R1 X1 RL X'2 I'2
R' 2 /s XmagRFE
ImagI FE
I 0
V F
- 36 -
3.11 Análise unidimensional do motor de indução linear
A análise unidimensional do MIL é feita tomando-se um motor com duplo
estator curto face e linor longo.
Este tipo de motor foi escolhido por apresentar elevada força propulsora e
uma força normal menor que seu semelhante de face única, além do fato de possuir
um custo de construção relativamente baixo, se comparado aos motores de estator
longo. Para este motor, mostrado na Figura 3.13, algumas hipóteses iniciais são
consideradas:
a) Os núcleos dos estatores são construídos de forma a apresentar elevada
resistência elétrica (núcleos laminados) e uma elevada permeabilidade
magnética, sendo que, para desenvolvimentos analíticos, esta será
considerada infinita.
b) O circuito magnético opera livre de saturação, face a grande espessura
do entreferro.
c) As correntes primárias são representadas por duas lâminas de corrente
que circulam somente na direção z, e tem comportamento senoidal.
d) A onda de força magnetomotriz, (fmm), se translada na direção do
movimento do linor, direção x.
e) O linor de comprimento muito grande e proporcionalmente muito fino (h)
apresenta correntes induzidas que circulam somente na direção z, com
permeabilidade magnética assumida semelhante a do ar (µ0).
f) A profundidade do núcleo de ferro na direção z é tomada como sendo
unitária (1 metro).
g) A densidade de campo magnético é função de x (espaço) e de t (tempo)
e está orientada na direção y.
A seguir são apresentados conceitos fundamentais para estabelecimento do
Modelo Unidimensional do MIL.

- 37 -
Figura 3.13 - Vista lateral do MIL de dupla face, com estator curto e linor longo.
3.12 Densidade linear de corrente no estator
Os MILs são dotados em sua maioria de enrolamentos trifásicos inseridos em
ranhuras dispostas ao longo da superfície do estator. A corrente nos enrolamentos
fica distribuída de forma discreta em condutores concentrados nessas ranhuras.
Essa disposição determina a forma de onda de força magnetomotriz que pode ser
modificada através da distribuição das bobinas de uma mesma fase, em diversas
ranhuras.
No estudo das máquinas elétricas os enrolamentos trifásicos podem ser
distribuídos por lâminas de corrente fictícias fluindo em condutores lisos, onde a
distribuição de corrente se manifesta de forma contínua pela superfície interna dos
mesmos. Teoricamente a lâmina de corrente deve produzir uma onda fundamental
de força magnetomotriz semelhante àquela que seria observada no motor dotado
de ranhuras.
O conceito de lâmina de corrente tem se mostrado muito útil no estudo dos
MILs, sendo utilizado por diversos pesquisadores em seus trabalhos. Adota-se para
a onda fundamental de densidade linear de corrente do estator, que se desloca no
sentido positivo do eixo x, a seguinte expressão:
τ
π−ω= xt.cos.Jj m11 (3.12)
a b
d c J 1/2
J 1/2 J2
h
y
x z x = 0 x = p. τ

- 38 -
Na expressão (3.12), (mJ1 ) é o valor máximo da densidade linear de corrente
(A/m), (ω ) é a freqüência angular da fonte de alimentação e ( τ ) é o comprimento
do passo polar (m). O valor máximo (pico) da densidade linear de corrente
corresponde a um único estator do motor mostrado na Figura 3.13 é:
2
1msm
JJ = (3.13)
com:
τ=
.p
k.I.N.J
wfmf
sm
3 (3.14)
onde (p) é número de polos do estator, (kw) o fator de enrolamento, (Ifm) o valor
máximo da corrente que circula pelos condutores do estator e (Nf) o número de
condutores ativos por estator e por fase, que é igual ao dobro do número de espiras
por estator e por fase (N1).
Quando a corrente que circula pelos condutores do estator é tomada em seu
valor eficaz, a densidade linear de corrente, em (A/m), é expressa por:
2
sms
JJ = (3.15)
3.13 Fator de enrolamento para o MIL
Os enrolamentos nas máquinas de indução trifásicas são executados em
bobinas dispostas em ranhuras nos pacotes dos estatores correspondentes. O
número de ranhuras de um estator trifásico é determinado pela equação:
q.p.3NRE = (3.16) Observa-se que estão presentes na equação o número de polos do pacote
do estator e o número de ranhuras por pólo e por fase (q).
O passo polar (τ) pode ser determinado pela expressão:
- 39 -
=
p
D.πτ (3.17)
Onde (D) é o diâmetro do entreferro.
Como as ranhuras estão distribuídas ao longo de um comprimento interno do
estator ou externo do rotor, pode-se estabelecer relação entre comprimento de
circunferência e número de ranhuras:
=
p
NRE
ranhurasτ (3.18)
Onde (ranhurasτ ) é o passo polar dado em ranhuras.
Um enrolamento em uma máquina de indução trifásica pode ter suas bobinas
com passo pleno ou distribuído.
A expressão que leva a obtenção do Fator de Distribuição do Enrolamento
(kd), é dado pela expressão:
=
q.3.2sen.q
3.2sen
kdπ
π
(3.19)
O enrolamento da máquina de indução trifásica pode ter suas bobinas com
passo pleno ou passo encurtado.
As razões para se utilizar encurtamento do passo em enrolamentos de
máquinas de indução são devidas a:
a) Com o encurtamento do passo das bobinas, a testa do enrolamento torna-
se menor e as bobinas têm maior rigidez mecânica. A reatância de
dispersão que tem na testa de bobina um de seus principais componentes
tem seu valor reduzido quando se introduz o encurtamento de passo,
modificando os parâmetros do circuito elétrico equivalente da máquina, o
que modifica sua corrente em vazio, sua corrente de partida e seu
conjugado.

- 40 -
b) Com o encurtamento do passo da bobina, consegue-se diminuir a
influência de alguns harmônicos espaciais do fluxo. Isto é extremamente
benéfico para o comportamento do conjugado do motor no seu estágio de
aceleração e para a forma final do sinal de força eletromotriz induzida nas
fases do enrolamento.
O Fator de Encurtamento de Passo do enrolamento (kp) é definido em
função do ângulo de encurtamento do enrolamento (β), que representa o Passo da
Bobina em forma angular, e é definido por:
=
2senkP
β (3.20)
O Fator de Enrolamento (kw) para o enrolamento das máquinas de indução
pode então ser definido como:
pdw k.kk = (3.21)
No anexo IV está descrito de forma mais detalhada a forma de dedução
matemática que envolve as expressões ligadas à obtenção do fator de enrolamento
para as máquinas de indução trifásicas.
3.14 Densidade de campo magnético no entreferro
A Lei de Ampère, em sua forma diferencial aplicada ao laço fictício (abcd),
praticado no motor da Figura 3.13, fornece:
t
DJH
∂
∂+=×∇
rrrr
(3.22)
Como as freqüências de operação dos motores de indução lineares são
relativamente pequenas, as correntes de deslocamento podem ser desprezadas, e:
JHrrr
=×∇ (3.23)
- 41 -
Para desenvolver-se o rotacional aplicado à intensidade de campo, admitem-
se as seguintes hipóteses:
A densidade de campo magnético terá somente componente na direção
do eixo y.
Toda a energia está armazenada no entreferro na forma de um campo
magnético.
Respeitadas as hipóteses propostas anteriormente, a intensidade de campo
magnético na direção y será:
g
jj
x
Hy 21 +=
∂
∂ (3.24)
onde (g) é o comprimento do entreferro (distância entre os dois estatores), (j1) a
densidade linear de corrente do estator e (j2) a densidade linear de corrente do linor.
Definindo-se b(x,t ) = b, como a densidade de campo magnético presente na
direção y, função do deslocamento e do tempo, pode-se escrever:
21
0
jjx
b.
g+=
∂
∂
µ (3.25)
Aplicando a Lei de Faraday ao laço mostrado na Figura 3.13 e considerando
que o campo elétrico somente possui componente na direção z:
x
b.V
t
b
x
Ezrx
∂
∂+
∂
∂=
∂
∂ (3.26)
Da expressão anterior, pode-se observar que a força eletromotriz presente
possui duas componentes, mocional e variacional, onde (Vrx) é a velocidade de
deslocamento da lâmina secundária. Como a densidade de campo possui somente
componentes na direção y, pode-se desprezar a dispersão de fluxo no linor e
considerar que toda a força eletromotriz presente está ligada à queda resistiva:
2r j.ez ρ= (3.27)

- 42 -
Onde (rρ ) é a resistividade superficial da lâmina secundária, dada pela relação
entre a resistividade volumétrica do material pela espessura da lâmina, como
mostrado a seguir:
h
vr
ρρ = (3.28)
Então a expressão (3.25) é escrita como:
r
ezj
x
b.
g
ρ+=
∂
∂
µ1
0
(3.29)
Derivando-se a expressão (3.29), em relação a (x), encontra-se:
x
j.
x
b.
g.
x
ezrr
∂
∂ρ−
∂
∂
µρ=
∂
∂ 1
2
2
0
(3.30)
Das expressões (3.25), (3.26) e (3.29) resulta:
x
j
t
b.
x
b.
V
x
b.
g
rr
rx
∂
∂=
∂
∂
ρ−
∂
∂
ρ−
∂
∂
µ1
2
2
0
1 (3.31)
A expressão (3.31) descreve o comportamento da onda de densidade de
campo magnético no entreferro do MIL mostrado na Figura 3.13. O terceiro termo
do primeiro membro da expressão (3.31) é uma derivada de b(x,t) em relação ao
tempo, diferindo-se dos outros termos. Portanto, para trazer a necessária
homogeneidade, procedem-se modificações neste termo. A solução particular desta
expressão é do tipo:
( )
+−= sss
x.t.cos.Bt,xb δ
τ
πω (3.32)
O desenvolvimento da expressão (3.31) através da utilização das expressões
(3.14) e (3.32), permite obter os valores de (Bs) e ( sδ ).

- 43 -
22
0
.
.
.
+
=
r
sx
s
s
Vsg
JB
ρµτ
π (3.33)
( )sx
rs
V.s..
g..tg
τµ
ρπδ
0
= (3.34)
Sendo (Vsx) a velocidade linear síncrona da densidade de campo magnético
no entreferro e (s) o escorregamento.
A expressão (3.33) permite determinar a densidade de campo magnético no
entreferro dos MILs operando com dois estatores dotados de enrolamento
(estatores ativos). Nesta expressão observa-se que a densidade de campo
magnético varia com o escorregamento, apresentando maiores magnitudes para o
motor operando em velocidade síncrona (s = 0) e valores mínimos para o motor com
linor bloqueado (s = 1).
Derivando-se a expressão de b(x,t), escrita na forma exponencial, em relação
ao tempo, resulta:
bjt
b..ω=
∂
∂→
(3.35)
A expressão (3.35) aplicada em (3.31), leva a uma equação diferencial de
segunda ordem, não homogênea, a coeficientes constantes:
x
jb..j.
x
b.
V
x
b.
g
rr
rx
∂
∂=−
∂
∂−
∂
∂ 1
2
2
0
1ω
ρρµ (3.36)
A equação homogênea de (3.36) tem como raízes:
rr
rx
r
rx
.g
...j
.g
V.
.g.
V.k,k
ρ
µω
ρ
µ
ρ
µ 0
2
0021
4
2
1
2+
±= (3.37)
O segundo membro da expressão (3.37) é uma raiz quadrada de número
complexo, e pode ser analisado separadamente de forma a obter-se a parte real e a
parte imaginária do mesmo:

- 44 -
rr
rx
.g
...j
.g
V.N.jM
ρ
µω
ρ
µ 0
2
0 4+
=+ (3.38)
Os termos (M) e (N) da expressão (3.38) são números reais e juntamente
com (3.37), conduzem a:
e.j
Nj
.g.
M.g.V.k
r
rrx
τ
π
αρ
ρµ−=−
−=
1
01
1
22 (3.39)
e.j
Nj
.g.
M.g.V.k
r
rrx
τ
π
αρ
ρµ+=+
+=
2
02
1
22 (3.40)
Observando-se as igualdades propostas em (3.39) e (3.40), encontra-se:
rxr
r
V.M.g.
g..
0
1
2
µρ
ρα
−= (3.41)
rxr
r
V.M.g.
g..
0
2
2
µρ
ρα
+= (3.42)
N
.2e
πτ = (3.43)
Os termos (1α ), ( 2α ) e (
eτ ) são todos positivos e conduzem à uma
expressão para a onda de densidade de campo magnético que se translada pelo
entreferro do MIL com velocidade síncrona (Vsx). A solução geral para b(x,t) é:
( ) ( ) ( ) ( )
+++
+−+
+−=
=++=
−−
2211
21
21 δτ
πωδ
τ
πωδ
τ
πω αα
e
x.t.cos.e.B
e
x.t.cos.e.B
x.t.cos.B
t,xbt,xbt,xbt,xb
xx
SS
s
(3.44) A equação (3.44) mostra o comportamento da densidade de campo
magnético no entreferro do MIL e é composta por três ondas. A primeira, de

- 45 -
comprimento de onda ( τ.2 ), representa a onda fundamental de campo magnético
bS(x,t), que seria esperada em um motor de comprimento infinito. A segunda, b1(x,t),
de comprimento de onda (e.2τ ), possui uma constante de atenuação (
11 α/ ),
viajando no mesmo sentido e possuindo a mesma freqüência angular que a onda
fundamental. Esta segunda onda representa o efeito longitudinal de extremidade de
entrada, que é um fenômeno que aparece na região onde a lâmina móvel penetra
no entreferro da máquina. A terceira e última onda b2(x,t), também de comprimento
(e.2τ ), possui uma constante de atenuação (
21 α/ ), apresentando a mesma
freqüência angular, porém, viajando em sentido contrário à da primeira. Esta última
componente conduz o efeito longitudinal de extremidade de saída, mostrando o
fenômeno que ocorre quando o linor deixa a região do entreferro. As amplitudes (B1)
e (B2) são determinadas a partir de condições de contorno.
O passo polar das ondas de efeito de extremidade de entrada e saída eτ é
função do ponto de operação do MIL, ou seja, função do escorregamento.
Analisando-se a expressão (3.44), observa-se que as ondas b1(x,t) e b2(x,t)
representam as distorções de campo provocadas pelas extremidades dos estatores.
Como já foi mencionado, além de viajarem em sentidos contrários, as mesmas são
amortecidas por constantes diferentes (21 1/ e /1 αα ).
A constante de atenuação ( /1 1α ) pode assumir valores muito superiores
aos assumidos por ( /1 2α ), para um mesmo motor e uma mesma velocidade de
operação. Sendo assim, o comprimento de penetração da onda longitudinal de
extremidade de entrada é muitas vezes superior ao da onda longitudinal de
extremidade de saída.
A onda de extremidade de entrada atua ao longo de um comprimento muito
grande do indutor do MIL, enquanto que a atuação da onda longitudinal de
extremidade de saída fica restrita a regiões próximas ao final do bloco do indutor.
Devido a esta pequena influência da onda de extremidade de saída, a maioria dos
autores despreza a sua presença e a expressão para onda de densidade de campo
magnético no entreferro pode ser simplificada, como mostrado na expressão:
( )
δ+
τ
π−ω+
δ+
τ
π−ω= α
−
1
x
1SSe
x.t.cos.e.B
x.t.cos.Bt,xb 1
(3.45)

- 46 -
onde o efeito longitudinal de extremidade de entrada é responsável pela maior
alteração das características da densidade de campo magnético no entreferro do
MIL.
3.15 Fator de Qualidade
O MIL é uma máquina elétrica constituída por um circuito magnético e um
circuito elétrico, Figura 3.14(a). Sejam quais forem os aspectos em estudo, estes
dependem sempre dos fatores construtivos da máquina, os quais, depois da
máquina construída não podem ser alterados.
Observando-se as equações da densidade de campo magnético do motor de
indução linear, nota-se que seu comportamento está ligado a variáveis
características importantes, tais como resistividade da lâmina linórica, espessura do
entreferro, passo polar e freqüência da fonte de alimentação. O comportamento da
máquina é sensivelmente alterado quando um destes parâmetros é modificado.
Desta forma pode-se caracterizar ou qualificar um MIL através destes parâmetros.
Figura 3.14 - Circuitos elétrico e magnético num dispositivo eletromagnético
Define-se Fator de Qualidade de uma máquina elétrica como o produto do
fluxo magnético pela corrente elétrica que atravessa a máquina. A máquina será
tanto melhor quanto maior for o seu fator de qualidade.
I I Ie
Im
CIRCUITOMAGNÉTICO
CICUITO ELÉTRICO
(a) (b)Sm
Se

- 47 -
O Fator de Qualidade (Q) proposto por [Laithwaite, 1976], visa qualificar os
sistemas conversores eletromagnéticos com base na observação de suas
características elétricas e magnéticas.
A princípio, algumas das propriedades das máquinas elétricas, tais como o
rendimento, podem levar a uma classificação dos MILs. No entanto, máquinas com
rendimentos idênticos podem apresentar tamanhos e custos diferentes.
Como toda máquina elétrica pode ser analisada como a composição de um
circuito elétrico com um circuito magnético, pode-se expressar sua “qualidade”
através de elementos que observem os dois circuitos. Assim, admite-se que o
melhor circuito elétrico produz a maior corrente para uma dada força eletromotriz
(fem), enquanto que o melhor circuito magnético produz o maior fluxo para uma
dada força magnetomotriz (fmm).
Nas máquinas elétricas, a corrente e o fluxo estão associados tanto a força
eletromotriz (fem) quanto a força magnetomotriz (fmm). Portanto a interação entre o
circuito primário e o secundário ocorre através da corrente elétrica e do fluxo
magnético. O produto destas duas grandezas é responsável pela força nos
dispositivos que efetuam a conversão eletromecânica de energia. O fator de
qualidade (Q) está, então, ligado a fatores como resistência elétrica e relutância dos
circuitos e quanto menores forem estes elementos, maior será a “qualidade” do
dispositivo.
A definição do fator de qualidade de uma máquina é importante para que se
tenha noção daquilo que ela irá realizar, e o que pode ser alterado, de modo que se
obtenha uma máquina com melhor rendimento possível.
A expressão (3.46) mostra que o fator de qualidade é inversamente
proporcional à resistência e à relutância.
Rs.Q
ℜ=
ω (3.46)
O inverso do produto da resistência (Rs) pela relutância (ℜ ), na expressão
(3.46), possui dimensão de tempo, de forma que (Q) resulte adimensional. O fator
de proporcionalidade ligado ao tempo, para as máquinas que operam em corrente
alternada, é a freqüência angular (ω ).

- 48 -
A expressão (3.46) pode ser particularizada para expressar o fator de
qualidade de um MIL [Laithwaite, 1976]. Para este tipo de motor, admite-se um
passo polar igual a (τ ), um entreferro (g), uma resistividade superficial do linor igual
a ( rρ ), e uma freqüência angular (ω ), resultando:
g..
..Q
rρπ
ωτµ2
0= (3.47)
O Fator de Qualidade descrito na expressão (3.47), apesar de sua utilidade
para a análise dos MILs, não incorpora um importante fenômeno, característico
destes motores, denominado de Efeito Transversal de Borda (ETB),
fundamentalmente ligado à geometria da máquina.
A presença do ETB nos motores assíncronos lineares é responsável por uma
não uniformidade na distribuição de correntes na lâmina linórica. Essa não
uniformidade provoca um aparente aumento na resistividade da lâmina e uma
redução na força propulsora, sendo, portanto necessária a sua inclusão na
expressão (3.47).
O ETB, analisado por diversos autores, notadamente [Russell e Norsworthy,
1958], é incluído nos modelos matemáticos através de um fator que modifica a
resistividade do linor.
Portanto, da expressão final do fator de qualidade do MIL, (3.47) resultam as
seguintes conclusões:
O fator de qualidade depende diretamente do passo polar. Isto significa que
quanto maior for o passo polar maior será este fator, porque um aumento do passo
polar implica num aumento da área efetiva dos circuitos magnético e elétrico,
provocando aumento do fluxo e da corrente linórica, e consequentemente, da força
longitudinal.
Por outro lado, o aumento do passo polar implica também num aumento da
velocidade do MIL, uma vez que esta é dada por (v=2.τ..f). Portanto, necessitamos
de uma relação entre o fator de qualidade e a velocidade pretendida para a
operação do motor.
Contém o termo freqüência (f), o que se seria de esperar na medida em que
se refere a uma máquina de corrente alternada.

- 49 -
O fator de qualidade varia inversamente com a resistividade superficial do
linor, (ρs). Verifica-se que quanto maior a intensidade do campo magnético, menor a
resistividade, maior será a o valor do comprimento do entreferro.
O fator de qualidade também varia inversamente com o entreferro (g).
Verifica-se que para um entreferro menor, menor será a relutância do circuito
magnético. De acordo com a definição do circuito magnético, [Duarte Oliveira,
2000], para a mesma força magnetomotriz, quanto menor for a relutância do circuito
maior será o fluxo magnético.
3.16 Efeito Transversal de Borda
A análise unidimensional efetuada na distribuição da densidade de campo
magnético no entreferro dos MILs pressupõe que as correntes induzidas no linor
possuem componentes apenas na direção z. Entretanto, esta hipótese não permite
considerar a circulação de correntes na região do linor externa ao entreferro, nos
motores que possuem lâmina secundária com largura maior que a dos estatores e
que formam o caso geral dessas máquinas. Assim os caminhos de corrente são
considerados como perfeitamente uniformes, não se considerando circulação de
correntes na direção x e os fechamentos das linhas de corrente no linor, na região
do entreferro dos MILs. Assim uma potência dissipada adicional, relativa às perdas
na lâmina deveriam ser consideradas.
Figura 3.15 - Corte transversal do MIL
A Figura 3.15 representa, esquematicamente, um corte transversal efetuado
em um MIL, com os blocos do estator de largura (c) o linor de largura (c’), que viaja
ABA LATERAL y
x z
ESTATOR
ESTATOR
c
c'

- 50 -
na direção x com velocidade (Vrx). A relação entre as larguras do indutor e do linor
(c/c’), juntamente com a resistividade da lâmina, são importantes elementos no
estudo do Efeito Transversal de Borda (ETB), que atua modificando a trajetória das
correntes estabelecidas no secundário.
Observando-se linores com abas de diversos motores, constata-se que
aqueles cuja lâmina linórica possui a mesma largura do estator (c/c’=1), apresentam
distribuição de correntes com componentes de menor intensidade se comparadas
ao motor com linor com abas maiores que o estator, contribuindo para a força
propulsora final de translação (componentes de corrente na direção z), além de
apresentarem instabilidade lateral em seu movimento [Gieras, 1993]. Por outro lado,
os motores que apresentam a largura de lâmina muito maior que a largura do
estator (c/c’<<1), não apresentam vantagens significativas em seu desempenho,
além do fato de elevarem o custo de construção destes motores.
Para determinar-se corretamente a largura da lâmina, pode-se utilizar fatores
de correção de sua resistividade como uma importante ferramenta de projeto, além
da observação das características particulares de cada aplicação.
O estudo do ETB para a determinação do valor ideal da relação (c/c’),
mostra que este efeito é diferente em origem e natureza do Efeito Longitudinal de
Extremidade, pois, não é originário do movimento relativo entre indutor e linor e não
envolve fenômenos transitórios de qualquer natureza.
A determinação da resistividade da lâmina do linor pode incluir em seu
cálculo, um fator de correção que envolva o ETB através da observação do
comportamento não uniforme da distribuição das correntes circulantes no linor. Este
fator afeta fortemente os modelos matemáticos para simulação dos MILs.
Diversos autores analisaram o ETB e estabeleceram fatores que,
modificando a resistividade da lâmina linórica, introduzem este efeito no
comportamento dos modelos dos MILs. A escolha do modelo matemático a ser
utilizado para a caracterização do ETB deve ser feita considerando-se,
principalmente, a precisão do modelo adotado.
Os trabalhos desenvolvidos por [Russell e Norsworthy, 1958] são os mais
utilizados para o estudo deste fenômeno. Desse modo, o fator de correção para a
resistividade superficial do linor (ks) proposto por Russell deverá ser adotado, em
face de sua simplicidade de cálculo, sempre que atenda a precisão desejada.
O fator proposto por Russell (ks), é dado pela expressão:
- 51 -
( )( ) ( )( )YXX
XS
tghtgh1.
tghk
ε+ε+ε
ε= (3.48)
onde:
τ
π=ε
.2
c.X (3.49)
( )τ
−′π=ε
.2
cc.Y (3.50)
O fator mostrado na expressão (3.48) é função apenas de parâmetros
mecânicos do MIL e sua variação se observa com a modificação do comprimento
das abas do motor (c’-c). [Yamamura, 1972] e [Simone, 1992], analisaram a
variação de (ks) com o comprimento das abas do linor e mostraram que a partir de
certo valor destas, o fator (ks) é praticamente constante, sendo, portanto, inútil
qualquer aumento. Assim pode-se demonstrar que um valor ótimo para o
comprimento da aba, ligado ao passo polar (τ), é obtido quando 1Y =ε . Portanto:
( )
τ
π
.2
cc.1
−′= (3.51)
( )π
τ=
−′
2
cc (3.52)
A expressão (3.52) mostra que o comprimento ideal da aba é cerca de um
terço do comprimento do passo polar ( para 1Y =ε ).
A resistividade superficial do linor, considerando-se a presença do ETB, é
alterada para um novo valor, dado por:
S
rc
k
ρρ = (3.53)
O fator (kS), por ter valor menor que 1, aumenta a resistividade da lâmina,
provocando uma redução no fator de qualidade (Q) e, como pode ser observado em
simulações, aproxima o comportamento do modelo matemático do modelo real.

- 52 -
O fator de qualidade, agora considerando o ETB é denominado de fator de
qualidade realístico (Qe), e calculado a partir de:
g..
..Qe
c
2
2
0
ρπ
ωτµ= (3.54)
De forma semelhante ao procedimento executado para incluir o ETB, outros
fenômenos poderiam ser introduzidos no estudo do fator de qualidade, tornando o
estudo ainda mais próximo do sistema real. Se forem considerados outros efeitos,
como o Efeito Pelicular, que em baixas freqüências pode ser desprezado, o efeito
do Fator de Carter, entre outros, pode-se introduzir novos fatores que modificam o
fator de qualidade (Q), encontrando um novo fator de qualidade realístico (Qe), que
caracteriza melhor a máquina real.
3.17 Efeito Longitudinal de Extremidade
A característica mais importante no estudo dos MILs é, sem dúvida, o fato
destes apresentarem um estator com extremidades, favorecendo o aparecimento de
perturbações no fluxo das regiões de entrada (Efeito Longitudinal de Extremidade
de Entrada) e de saída (Efeito Longitudinal de Extremidade de saída) do motor.
Para observar estes fenômenos, admite-se que o sistema de referência está
colocado no estator, que é imóvel, como mostrado na Figura 3.16 e, admite-se que
o linor se move com velocidade (Vrx), no sentido positivo do eixo x, de forma
semelhante ao campo magnético de translação, que viaja com velocidade (Vsx). O
ponto (x=0) caracteriza a região de entrada da lâmina no campo magnético e,
portanto, a extremidade de entrada e o ponto (x = p. τ), caracteriza a região de
saída da lâmina do campo, ou seja, a extremidade de saída.
O Efeito Longitudinal de Extremidade (ELE), observado nos MILs, está
relacionado com o movimento do linor em relação aos estatores e atua de forma
diferente em MILs de mesmas características mecânicas e diferentes velocidades.

- 53 -
Figura 3.16 - Vista Longitudinal do MIL
O comportamento do motor de arco da Figura 3.16 é semelhante ao do MIL
de estator curto, mostrado na Figura 3.18, onde pode-se visualizar o Efeito
Longitudinal de Extremidade.
Figura 3.17 - Motor setorial em arco de 180º
Figura 3.18 - Laços Fictícios praticados no Linor em movimento
Traçando-se sobre a lâmina secundária do motor, quatro laços fictícios, faz-
se a observação para um instante particular (t1). Os laços (L1) e (L4) estão muitos
distantes das extremidades do estator de forma a permitir afirmar que os mesmos
Vrx y
x z
ESTATOR
ESTATOR
x = 0 x = p.τ
ROTOR
ESTATOR
Vrx
ESTATOR FIXO
L1 L2 L3 L4
LINOR MÓVEL

- 54 -
não concatenam fluxo magnético no instante (t1). Não concatenando fluxo, não
estão sujeitos a variações deste, portanto, não estão sujeitos a forças eletromotrizes
induzidas e, tampouco, a correntes elétricas circulantes.
Os laços (L2) e (L3), por sua vez, concatenam fluxo magnético variante no
tempo e no espaço e estão sujeitos a forças eletromotrizes induzidas, por
apresentarem velocidade em relação ao campo magnético de translação. Como o
estator está estático em relação ao referencial externo e como o campo magnético
viaja no sentido positivo de (x), ou seja, o mesmo sentido do linor são observados
diversos fenômenos nestes laços.
Como é a lâmina que se movimenta, a extremidade da esquerda do indutor
Figura 3.18, é a de entrada e a da direita a extremidade de saída. Os pontos
situados na metade esquerda do laço (L2) estão fora da região ativa, enquanto que
os pontos da metade direita estão imersos no fluxo magnético gerado pelo indutor.
No laço (L3), apresenta-se a situação inversa.
A situação imposta pelas correntes induzidas no linor, na região (L2), está
estabelecida de forma a opor-se ao crescimento do fluxo concatenado pelo mesmo.
No laço (L3), a reação imposta pelas correntes atua no sentido de se opor ao
decrescimento do fluxo concatenado pelo referido laço, o que já evidencia
comportamento distinto para as duas extremidades.
O fato de haver circulação de correntes no laço (L3), após sua saída da
região ativa, é motivo do aumento das perdas por correntes parasitas, além da
interação do fluxo magnético criado por estas correntes com o fluxo magnético de
espraiamento do estator dar origem a uma componente de força frenante, fato que
é tão mais pronunciado quanto maior for a velocidade relativa entre lâmina que
forma o linor e o indutor.
Como existe corrente induzida no laço (L2), ocorre o aparecimento de um
forte fluxo magnético que interage com o fluxo magnético de translação, alterando o
comportamento da força de propulsão, no sentido de reduzí-la. Desta forma, as
extremidades do estator dão origem a duas componentes de forças frenantes que
caracterizam o Efeito de Extremidade Longitudinal (de entrada e de saída).
Como visto no item 3.14, os efeitos observados nas extremidades do estator
propagam-se através do entreferro, distorcendo o campo magnético de translação
em regiões distantes das extremidades. A penetração da perturbação de fluxo,
devido aos efeitos extremidades, está ligada, principalmente, à velocidade do MIL.

- 55 -
Nos conversores de alta velocidade, a influência da perturbação que ocorre
na extremidade de entrada é muito maior que a perturbação que ocorre na
extremidade de saída. Deve-se lembrar que o Efeito Transversal de Borda também
se faz presente juntamente com os Efeitos Longitudinais de Extremidades.
Para motores de baixas velocidades, o Efeito Longitudinal de Extremidade de
Entrada é atenuado mais rapidamente e sua influência no desempenho do motor é
menor quer nos motores de alta velocidade.
3.18 Número de Reynolds magnético
Observa-se do estudo dos efeitos de extremidade, que a velocidade do MIL
constitui um importante subsídio para sua análise.
Como o Efeito Longitudinal de Extremidade atua de forma diferente para
motores de alta e baixa velocidades, surge a necessidade de classificar-se os
motores, partindo-se de sua velocidade nominal de operação, em grupos que
apresentam mesmo comportamento. Segundo [Yamamura, 1972], pode-se
classificar os motores a partir do valor obtido pela expressão:
( )
g...4
V.N
c
2
rx0rm
ρω
µ= (3.55)
A expressão (3.55) representa o “Número de Reynolds Magnético”, e permite
classificar os motores quanto a sua velocidade. Um motor apresenta
comportamento de alta velocidade quando (Nrm) assume valores muito superiores à
unidade e, de baixa velocidade quando (Nrm) assume valores menores que a
unidade, ou seja:
Nrm >> 1 - Motores de comportamento de alta velocidade
Nrm < 1 - Motores de comportamento de baixa velocidade
Existe também, a situação em que (Nrm) assume valores pouco maiores que
a unidade. Neste caso, consideram-se os motores como de velocidade

- 56 -
intermediária, devendo-se proceder a uma análise mais detalhada dos efeitos
provocados pelas extremidades, principalmente a de entrada.
O “Número de Reynolds Magnético” (Nrm), pode também ser expresso em
função do fator de qualidade (Q), tomando-se como base duas equações
importantes no estudo dos MILs, as expressões f..2Vsx τ= e ( ) sxrx V.s1V −= ,
identificadas como (3.9) e (3.10), onde (Vsx) é a velocidade síncrona do campo
magnético de translação do motor, (s) o escorregamento e (f ) a freqüência da fonte
de alimentação.
O “Número de Reynolds Magnético” (Nrm), pode então ser expresso por:
( )
Q.4
s1N
2
rm
−= (3.56)
O escorregamento na expressão (3.56), pode então ser adotado, para
análises, como o referente à velocidade nominal de operação do MIL.
A influência do Efeito Longitudinal de Extremidade na força propulsora pode
diferir em muito, para diferentes classes de velocidade de operação. Assim, MILs
caracterizados como de baixa velocidade possuem força propulsora máxima
reduzida a apresentam como característica particular, o fato de desenvolverem
força em velocidade síncrona. Os MILs de média velocidade apresentam maior
redução de força propulsora máxima, se comparado com os MILs de baixa
velocidades, enquanto os MILs de elevadas velocidades apresentam uma redução
ainda maior na força máxima, que é praticamente a força gerada em sua partida e
apresentam força nula em velocidades pouco menores que a síncrona.
3.19 Inclusão do Efeito Longitudinal de Extremidade
A modelagem de um MIL através de circuitos elétricos equivalentes é
possível de ser realizada e pode ser uma excelente ferramenta para o estudo
destes motores, permitindo o cálculo da força propulsora, tensão (para um MIL
operando com corrente eficaz constante), fator de potência e rendimento, através
de um modelo que é muito semelhante ao utilizado nos motores de indução
rotativos.

- 57 -
Um modelo matemático utilizado para simular um MIL com linor longo,
operando com um ou dois estatores ativos com seus parâmetros calculados através
da teoria e projeto desenvolvidos por [Simone, 1992], onde cada parâmetro é
calculado a partir de informações construtivas do motor, como dimensões do
estator, número de ranhuras, tipo de enrolamento, entreferro, espessura do linor,
largura do linor, corrente nominal, pode ser representado na Figura 3.19.
Figura 3.19 - Circuito equivalente tradicional
Em termos de circuito elétrico a redução da tensão sobre o ramo de força é
conseguida com a introdução de uma impedância adicional, colocada em paralelo
com o ramo magnetizante, que é influenciada pelo fator de correção do efeito
longitudinal de extremidade (ke) [Gieras, 1987]. Esta impedância varia com a
velocidade e assume valores bastante reduzidos em elevados escorregamentos.
Faz-se assim uma drenagem de corrente do circuito e reduz-se a corrente sobre o
ramo de força, resultando forças atenuadas para elevadas velocidades.
Pode-se encontrar MILs com linores construídos empregando diversos
materiais, tais como, lâminas de cobre ou alumínio, ou uma combinação de cobre e
ferro ou alumínio e ferro. O linor composto por uma base de ferro e uma capa de
cobre ou alumínio são denominados também de pista de reação.
Dependendo da forma construtiva utilizada, como no caso dos MILs com dois
estatores ativos e linor em forma de lâmina, tem a dispersão de fluxo de secundário
muito pequena mesmo com a ausência de ferro no linor do MIL. Isto leva a uma
simplificação do modelo matemático, no que se refere ao circuito de secundário,
R 1 jX 1 jX' 2
R' 2/s X mag R mV 1
Ramo de Magnetização Ramo de Força
- 58 -
observado a partir do primário. Que pode ser representado unicamente por uma
resistência (R’2). Essa resistência de linor refletida no estator possui importância
muito grande na modelagem da máquina assíncrona linear, pois, permite que o
Efeito Transversal de Borda seja incluído no modelo matemático, a partir de fatores
de correção (fator ks), trazendo os resultados do modelo para valores muito mais
próximos dos valores reais obtidos em laboratório.
O modelo da Figura 3.19, com (R’2) calculada de forma a permitir a
introdução do ETB, fica mais próximo do modelo final a ser utilizado em simulações,
porém, o outro efeito que atua de forma importante nos MILs que é o Efeito
Longitudinal de Extremidade, a ser introduzido.
A forma de introdução do ELE no circuito elétrico equivalente é tal que a
tensão sobre o ramo de magnetização do modelo matemático resulta reduzida à
medida que a velocidade do motor aumenta. Assim, a corrente sobre o ramo de
força também diminui e a força propulsora é reduzida, em velocidades próximas à
velocidade de sincronismo.
Esta alteração na tensão pode ser entendida como uma alteração na
densidade de campo magnético do entreferro, que é modificada fortemente, em
altas velocidades. Tomando-se o modelo de campo composto por duas ondas: uma
onda fundamental de campo (bS) e outra onda de campo de extremidade de entrada
(b1) e não considerando a onda de extremidade de saída, quando a velocidade de
operação aumenta a onda (b1) começa a atuar com maior intensidade sobre a onda
(bS) e a resultante, bastante atenuada, leva a uma tensão induzida menor, fato este
que deve ser representado no modelo.
A Figura 3.20 mostra o circuito com correção para o ELE já implementada,
através da impedância adicional (Ze). Esta impedância é calculada a partir dos
parâmetros da máquina, principalmente reatância de magnetização e resistência de
linor refletida para o indutor e do valor (ke), na forma mostrada na expressão (3.57).
( )
e
e
e
e Zk
kk .
1−= (3.57)
onde (Ze) é a impedância equivalente referente aos parâmetros de linor refletidos e
magnetização.

- 59 -
Figura 3.20 - Circuito elétrico equivalente considerando a impedância (Ze ) para a consideração do ELE
Quando o circuito elétrico mostrado na Figura 3.20, é simulado com valores
de corrente de estator constantes, aparece um resultado semelhante ao mostrado
na Figura 3.21, onde aparecem duas curvas de força propulsora em função do
escorregamento (1-s). Nas curvas do gráfico pode-se observar o efeito da
impedância adicional (Ze) colocada no circuito, que dá origem a curva de força com
menor valor máximo. A outra curva mostrada é a do circuito elétrico sem a
impedância (Ze), ou seja, sem a influência do Efeito Longitudinal de Extremidade e
que não corresponde ao comportamento real do MIL para todos os valores de
escorregamento.
30
25
20
15
10
5
00 0.2 0.4 0.6 0.8 1.0
2
1
(1-s)
Força
(N)
1 - Sem Ze 2 - Com Ze
Figura 3.21 - Força Propulsora em função da velocidade obtida através do circuito
elétrico equivalente para o MIL tipo disco.
R 1 jX 1 jX' 2
R' 2 /s V 1 X mag R mZ e
- 60 -
Analisando o gráfico da Figura 3.21, verifica-se que as duas curvas de força,
com e sem correção do ELE, apresentam um mesmo valor de força no instante da
partida (s=1), demonstrando, que quando o MIL está bloqueado não existe
influência do ELE no motor, somente sendo importante o Efeito Transversal de
Borda. Este comportamento se verifica, também, quando o motor está operando
com grandes escorregamentos (0 < 1-s < 0,2), onde as duas curvas caminham
praticamente juntas. Quando o motor começa a adquirir velocidade, o ELE começa
a manifestar o seu efeito diminuindo o valor da força final, o que pode ser visto na
curva, apresentada na Figura 3.21, que apresenta valores menores que aqueles
verificados na curva do circuito sem correção.
3.20 Modelagem dinâmica para os MILs
A dificuldade de representar as máquinas de indução lineares por modelos
está na própria geometria da máquina, uma vez que sua forma construtiva, distinta
da máquina de indução rotativa que é um dispositivo baseado na simetria, faz surgir
fenômenos e efeitos que não são facilmente modelados, como no caso dos efeitos
longitudinais de extremidades e do efeito transversal de borda.
A determinação dos parâmetros de um MIL é dificultada pela existência dos
efeitos de extremidades que atuam de forma muito significativa, produzindo
perturbações de fluxo com redução da força propulsora, principalmente no ensaio
em vazio, onde o MIL opera com seu menor escorregamento o qual comparado
com o das máquinas rotativas é bastante elevado. Neste tipo de ensaio os dados
obtidos sofrem grande a influência do efeito longitudinal de extremidade. A
representação do MIL em regime permanente foi efetuada através de circuitos
elétricos equivalentes.
Os parâmetros necessários para a simulação em regime transitório dos MILs
são: resistência de estator, indutância de dispersão de estator, indutância de
magnetização, resistência e indutância de dispersão do linor refletidas para o
estator.

- 61 -
3.21 Resistência do enrolamento do estator
A resistência por fase do enrolamento de um estator ativo da máquina linear,
pode ser determinada através da expressão genérica seguinte, considerando a
operação com corrente eficaz constante:
1
111 .
SR lρ= (3.58)
Onde (ρ1) é a resistividade volumétrica dos condutores do indutor, (l1) o
comprimento dos condutores de uma fase e (S1) a área dos condutores.
No MIL, o comprimento médio de um condutor ativo que forma o enrolamento
do estator depende da largura do núcleo do estator (c) e do comprimento da
“cabeça de bobina” (lcb), como mostra a expressão:
cbm lcL += (3.59)
O comprimento (lcb) depende do tipo de enrolamento utilizado para o MIL e
do tipo de condutores empregados (circulares ou retangulares). A densidade
superficial de corrente especificada para estes estatores, é uma variável importante
de projeto, escolhida de acordo com o tipo de aplicação.
Como o indutor possui (Nf) condutores ativos por fase e a densidade linear de
corrente de indutor (Js) é expressa por:
τ.p
k.N.3J
wf
s = (3.60)
onde (p) é o número de pólos, (τ) o passo polar e (kw) o fator de enrolamento do
estator.
A resistência do enrolamento do indutor, para uma fase do MIL, é dada por
uma expressão que é função da corrente de operação e é dada por:
2
f
cbsf1
1I..3
)lc.(.p.J.d.R
+=
τρ (3.61)
Sendo (df ), a densidade superficial de corrente dos condutores.
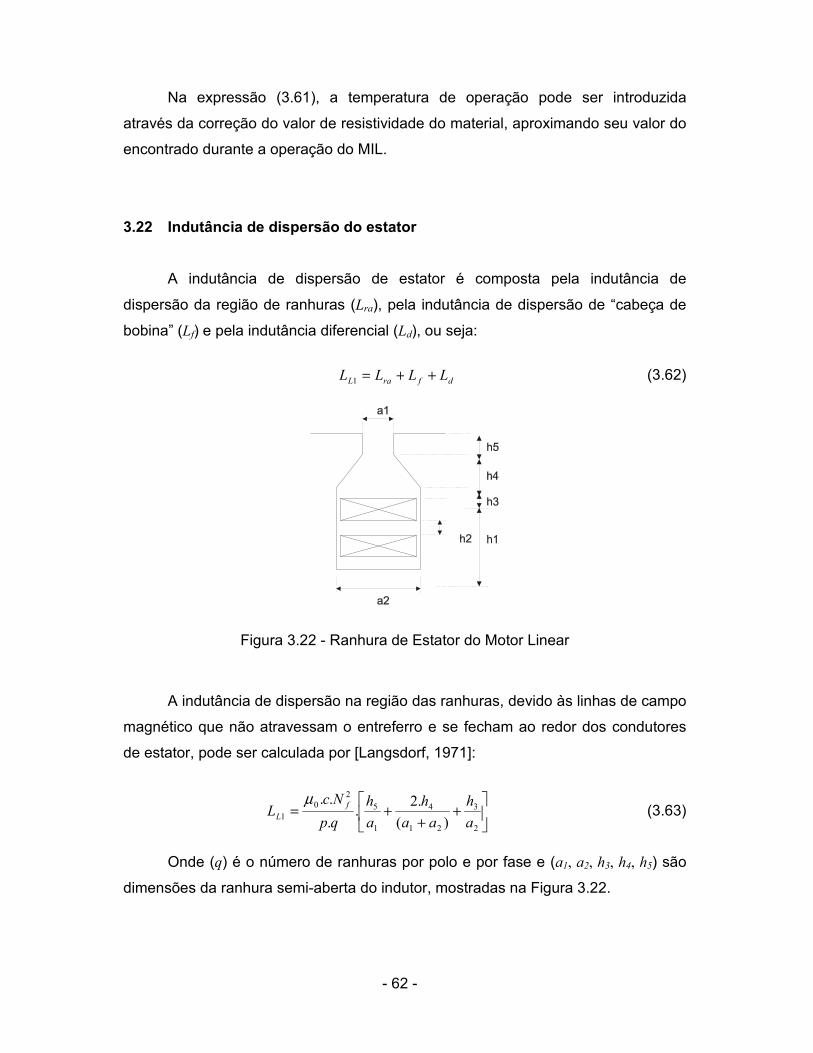
- 62 -
Na expressão (3.61), a temperatura de operação pode ser introduzida
através da correção do valor de resistividade do material, aproximando seu valor do
encontrado durante a operação do MIL.
3.22 Indutância de dispersão do estator
A indutância de dispersão de estator é composta pela indutância de
dispersão da região de ranhuras (Lra), pela indutância de dispersão de “cabeça de
bobina” (Lf) e pela indutância diferencial (Ld), ou seja:
dfraL LLLL ++=1 (3.62)
Figura 3.22 - Ranhura de Estator do Motor Linear
A indutância de dispersão na região das ranhuras, devido às linhas de campo
magnético que não atravessam o entreferro e se fecham ao redor dos condutores
de estator, pode ser calculada por [Langsdorf, 1971]:
+
++=
2
3
21
4
1
5
2
0
1)(
.2.
.
..
a
h
aa
h
a
h
qp
NcL
f
L
µ (3.63)
Onde (q) é o número de ranhuras por polo e por fase e (a1, a2, h3, h4, h5) são
dimensões da ranhura semi-aberta do indutor, mostradas na Figura 3.22.

- 63 -
A indutância de dispersão de “cabeça de bobina” é devida às linhas de
campo que envolvem os condutores situados fora do núcleo do indutor e pode ser
calculada através da expressão, [Creppe, 1997]:
−= 1
.3.3,0.
.. 2
0
τ
ττµbf
fp
NL (3.64)
Onde ( bτ ) é o passo da bobina do enrolamento do estator.
A indutância de dispersão diferencial está relacionada com as linhas de
campo magnético que circulam pela região do entreferro situada nas proximidades
da abertura da ranhura e pelos dentes do indutor e é expressa por:
+
=
1
1
2
0
.45
.5
..
..
a
g
a
g
qp
NcL
f
d
µ (3.65)
A indutância de dispersão diferencial é relativamente pequena, se comparada
com a indutância de “cabeça de bobina” e com a indutância de dispersão da região
das ranhuras.
3.23 Indutância de dispersão de linor refletida para o indutor
As máquinas de indução lineares que possuem linor em forma de lâmina,
construída com materiais não ferromagnéticos (cobre ou alumínio) apresentam,
uma indutância de dispersão de linor muito pequena, podendo ser desprezada para
a maioria das análises e cálculos efetuados. Nas máquinas com estator circular,
mas não totalmente fechado formando um arco setorial, entretanto, a indutância de
dispersão não pode ser desprezada. A filosofia de cálculo desta indutância, aplicada
às máquinas de indução rotativas, leva a expressões que permitem relacionar os
valores da indutância de estator com a de rotor refletida, [Langsdorf, 1971].
−=
R
RLL
C
CLL
1.' 12 (3.66)
- 64 -
A constante (CR) relaciona os valores das indutâncias de dispersão de estator
e linor refletida. Seu valor depende do tipo de máquina analisada e pode assumir
valores na faixa de:
0,13,0 ≤≤ RC (3.67 )
Nas máquinas de indução lineares onde o linor é construído com materiais
não ferromagnéticos, o valor da constante (CR) assume os maiores valores podendo
ser considerada como unitária.
3.24 Indutância de magnetização
A indutância de magnetização, calculada a partir da teoria das máquinas
rotativas, pode ser observada na expressão (3.68) e determina o comportamento da
corrente de magnetização, uma vez que as perdas que ocorrem no núcleo do
indutor são pequenas. A indutância de magnetização dos MILs pode ser calculada,
a partir das expressões desenvolvidas para as máquinas rotativas, ficando na
forma:
c
2
2
fw0
1Lk.g.p.
)N.k.(c...3L
π
τµ= (3.68)
Onde (g) é o entreferro e (kc) o fator de Carter, desenvolvido para levar em
conta o efeito do ranhuramento do núcleo do indutor.
3.25 Resistência de linor refletida para o estator
A resistência de linor, observada a partir do estator (refletida) é, juntamente
com a indutância de magnetização, um parâmetro crítico para a determinação do
comportamento dos MILs, podendo ser calculada [Simone, 1992] partindo-se da
hipótese de um rotor laminar, onde cada linha de corrente corresponde a uma barra
de uma gaiola fictícia. A resistência desta barra hipotética, calculada de forma
semelhante a uma resistência de estator, é expressa por:

- 65 -
τ
ρ
.p
)N.k.(.c.3R
2
fwr2
' = (3.69)
3.26 Inclusão do Efeito Transversal de Borda
Na máquina de indução linear o Efeito Transversal de Borda (ETB) provoca
uma perturbação na distribuição de campo magnético de entreferro, no sentido
transversal ao comprimento do linor. Essa perturbação de campo magnético está
associada à circulação de correntes por caminhos não uniformes no linor,
colaborando para uma redução na força propulsora, pois, implica em uma redução
das componentes de força atuando no sentido do movimento. A Figura 3.23 mostra,
esquematicamente, o comportamento das linhas de correntes estabelecidas em um
linor de quatro polos, produzido por um estator imóvel em relação ao linor.
Figura 3.23 - Linhas de corrente sobre a lâmina secundária (linor)
Nas máquinas rotativas, as correntes de rotor utilizam-se de caminhos bem
definidos para sua circulação, através das barras depositadas em ranhuras e seus
fechamentos ocorrem em anéis de curto-circuito de seção reta elevada. Assim, em
gaiolas bem projetadas, o ETB praticamente não introduz modificações no
comportamento da máquina.
A resistência (R’2) apresentada em (3.23) possui valor adequado para
máquina com caminhos bem definidos de corrente, como o caso das máquinas
rotativas. Nas máquinas lineares, o ETB pode ser definido no cálculo da resistência

- 66 -
através do fator de Russell (ks), que altera o valor da resistividade superficial (ρr)
para um novo valor (maior), dado por (ρc):
s
rc
k
ρρ = (3.70)
ficando:
τ
ρ
..p
)N.k.(.c.3R
2
fwc2
' = (3.71)
Onde (ρc) é mo valor da resistividade superficial corrigida pelo fator de
Russell (ks).
3.27 Equações para o motor de indução linear
O equacionamento proposto para as máquinas de indução rotativas, pode ser
adaptado e aplicado às máquinas de indução lineares, inicialmente, sem considerar
a presença do ELE de Entrada, através de modificações adequadas.
Nas máquinas lineares, o deslocamento angular das máquinas rotativas,
dado pelo ângulo posicionador (θ), é substituído pelo deslocamento linear, dado
pelo posicionador linear (x). A velocidade angular das máquinas rotativas (ω) é
dada, nas máquinas lineares, pela velocidade linear (Vrx). Os conjugados
desenvolvidos (eletromagnético) e frenantes das máquinas rotativas são
equivalentes às forças propulsoras e forças frenantes nas máquinas lineares. O
momento de inércia das máquinas rotativas dá lugar, na máquina linear, a massa do
elemento móvel [Ivanov-Smolenski, 1980]. Estas comparações são apresentadas
na Tabela 3.1.
Máquina Rotativa Máquina Linear conjugado desenvolvido (Te) força propulsora (frx) conjugado de carga (TL) força de carga (fL) velocidade angular (ω) velocidade linear (vrx) posição angular (θ) posição linear (x)
momento de inércia (J) massa (ma) aceleração angular (dω/dt) aceleração linear (dvrx/dt)
Tabela 3.1 - Variáveis características das máquinas elétricas

- 67 -
Como as configurações do estator e do linor podem ser admitidas como
sendo do tipo não saliente (liso), as indutância dependente da posição do linor são
as indutâncias mútuas entre as fases do estator e linor, e todas as indutâncias
restantes podendo ser tomadas como invariáveis com o deslocamento do linor.
Definindo-se (Ll2) como sendo a matriz das indutâncias mútuas entre indutor
e linor e (x) como sendo a distância entre o eixo da bobina de referência de indutor
e o eixo da bobina de referência de linor, tem-se:
−+
+−
−+
=
).cos()3
.2.cos()
3
.2.cos(
)3
.2.cos().cos()
3
.2.cos(
)3
.2.cos()
3
.2.cos().cos(
.2
eee
eee
eee
ml
kkk
kkk
kkk
LL
τ
ππ
τ
ππ
τ
π
π
τ
π
τ
ππ
τ
π
π
τ
ππ
τ
π
τ
π
(3.72)
Onde (τ) é o passo polar do motor, e (ke) o fator de inclusão do efeito
longitudinal de extremidade.
A expressão da força propulsora é obtida da expressão que relaciona as
correntes do indutor, as correntes de linor refletidas e a variação da indutância
mútua estator-linor com a posição:
'
112
1 ...2
1Ι
∂
∂Ι= Τ
x
xL
Lf (3.73)
A força propulsora (fx) desenvolvida é oposta à força de carga (fL) e seu valor
em (N), é obtido através da equação diferencial seguinte:
dt
dVmff rx
aLx .=− (3.74)
com:
rxVdt
dx= (3.75)
Onde (ma) é a massa e (Vrx) é a velocidade do linor.

- 68 -
3.28 Força propulsora considerando o ELE
A força propulsora do MIL, na direção do deslocamento, para composição de
campos apresentada, pode ser determinada a partir da expressão de Lorentz para a
força, aplicada aos MILs, e apresenta a forma [Yamamura, 1972]:
[ ]dxtxbjc
f xr .*),(.Re.2
10∫=τ
(3.76)
Nas máquinas analisadas, a corrente de indutor é admitida como sendo
formada por uma capa de corrente, da forma:
−= xt.cos.Jj m11
τ
πω , já mencionada anteriormente pela expressão (3.12).
Onde b(x,t)* é o complexo conjugado de b(x,t), (c) a largura do estator e o
produto (p.τ) o comprimento do estator.
A força propulsora (fxr), obtida tendo em vista as expressões (3.73) e (3.76), é
composta de duas parcelas de valor médio não nulo: uma referente a onda
fundamental (fx) e outra devida a onda de extremidade de entrada (fxe). A força
propulsora é então composta por:
xexxr fff += (3.77)
A componente de força propulsora fundamental da máquina, sem levar em
consideração o Efeito Longitudinal de Extremidade é obtida da expressão (3.45)
considerando-se apenas a primeira parcela do segundo membro da equação:
)scos(2
J.B..p.cf m1s
x δτ
= (3.78)
onde (Bs) é a amplitude densidade de campo magnético.
A segunda parcela de força, originada pelo ELE de Entrada, é obtida de
forma análoga e apresenta a seguinte expressão [Hirasa, 1980]:
2/12
1
1
e
2
21sm1
xe
.11.
.A.2
A.A.B.J.cf
++
=
πα
τ
τ
π
(3.79)
onde:

- 69 -
)sen(2
)cos(...1 s
sgA r δ
δρπ+= (3.80)
−−
−−=
−
)a1(sena1.p.
sen.eA1
.p
21 δδδδ
τ
τπα
τ
(3.81)
)1cos(..v.
g..)1(sen.
.v.
g.1A
erx0
r
1rx0
r3 δ
τµ
ρπδ
αµ
ρ−
+−
+= (3.82)
2
r
rx
2
0
4
V
.
g.A
+
=
ρτµ
π (3.83)
−= )scos(
V..
)s(sen.g..A
rx0
r5 δ
τµ
δρπ (3.84)
e1
111
τττ−= (3.85)
πα
τδ
.)a(tg
1
1−= (3.86)
( ) ( ) ( ) ( )( )( ) ( ) ( )e41rxr45
e45rxr41
/)s(tg..A/A/)s(tg.1.V/A/A
/)s(tg..A/AV//)s(tg.1.A/A)1(tg
τδττδπρ
τδτρτδπδ
−+−
+++= (3.87)
A expressão: rx
r
vs
gstg
...
..)(
0 τµ
ρπδ = foi obtida da expressão (3.34), e (1/α1) é o
comprimento (m) de penetração da onda de extremidade longitudinal de entrada na
região do entreferro.
O comportamento da força resultante (fxr) dos MILs é, portanto, obtido
através da soma das duas componentes de força mostradas, podendo assumir
diferentes características, de acordo com particularidades de cada motor analisado.
De uma forma geral, a componente de força (fxe) atua como uma força frenante em
relação à componente (fx), reduzindo o valor final da força propulsora. Para alguns
MILs, ou para determinadas freqüências de alimentação, a componente de força
(fxr) pode assumir valores positivos, colaborando com a força final desenvolvida.
A composição de forças que ocorre nas máquinas lineares, assume
características interessantes em motores classificados como de “baixa velocidade”,
pois, nestes motores a força propulsora existe, mesmo em velocidade síncrona e,

- 70 -
muitas vezes, em velocidades bem acima da síncrona. Por outro lado, nos motores
classificados como motores de “alta velocidade” a força propulsora é nula para
velocidades inferiores à síncrona. Os motores de “média velocidade” apresentam
comportamento semelhante aos dos motores de indução rotativos, com forças nulas
para velocidade síncrona. Para efeito de visualização do exposto anteriormente, são
apresentadas na Figura 3.24 três curvas de força propulsora em função do
escorregamento (velocidade), para motores hipotéticos operando nas três
condições citadas.
Figura 3.24 - Comportamento da Força Propulsora em função do escorregamento
para MILs de (a) baixa velocidade (b) média velocidade e (c) alta velocidade
3.29 Força propulsora considerando a inclusão do ELE de entrada
Tomando a expressão de força mostrada na expressão (3.77), pode-se obter
a relação entre a força propulsora real e a força propulsora sem o efeito de
extremidade, através da seguinte expressão:
x
xe
x
x
x
xr
f
f
f
f
f
f+= (3.88)
A relação apresentada no primeiro membro da expressão (3.88), é o que vai
se denominar Fator de Extremidade, (ke), e apresenta-se como:
x
xe
ef
fk += 1 (3.89)
- 71 -
Das expressões (3.78) e (3.79) na expressão (3.89), encontra-se, a
expressão para o fator de extremidade (ke).
22
1
1
1
3
0.
.1.
...
..
...2
1 A
pA
V
g
krx
s
e
+
−=
πα
τ
τ
πτ
τµ
ρπ
(3.90)
Onde A2 e A3 são expressões apresentadas em (3.81) e (3.82). O fator (ke)
proposto assume um comportamento diferente para cada motor analisado e, para a
maioria dos motores lineares apresenta valores próximos à unidade, para grandes
escorregamentos e valores muito pequenos, eventualmente negativos, para baixos
escorregamentos. Este comportamento pode mudar, de acordo com o tipo de
máquina analisada, permitindo classificar o seu comportamento como sendo de alta
ou baixa velocidade.
3.30 Relação entre os fatores de correção para os ELE
O fator (kr) [Simone, 1996] indica a relação entre a corrente (I’’2), que é a
corrente de linor refletida para o indutor, considerando o Efeito Longitudinal de
Extremidade e (I’2), que é a corrente de secundário refletida para o primário sem
considerar a presença do ELE.
2
2r
I
Ik
′
′′= (3.91)
A potência desenvolvida pela máquina de indutor infinito, onde não se faz
presente o ELE, é dada por:
( )2
2
rxsx
rx2T I.
VV
VR.3P ′
−′= (3.92)
onde (Vsx)é a velocidade síncrona da máquina e (Vrx) a velocidade de operação.
Para a máquina linear, onde estão presentes os efeitos de extremidades, a
potência em (W) desenvolvida é:

- 72 -
( )2
2
rxsx
rx2R I.
VV
VR.3P ′′
−′= (3.93)
Relacionando as potências mostradas em (3.92) e (3.93) com a definição de
(kr), obtém-se:
( )2
rTR kPP = (3.94) A potência desenvolvida pelas máquinas elétricas pode ser avaliada através
do produto da força pela velocidade:
rxxT V.fP = (3.95)
rxxrR V.fP = (3.96)
Da definição de fator de relação mostrada em (3.91), e das expressões
anteriores, obtém-se:
( )2
rxXR kff = (3.97)
Comparando as expressões mostradas em (3.97) e (3.91) encontra-se a
relação entre os fatores (kr) e (ke).
( )2re kk = (3.98)
A expressão (3.98) permite relacionar o fator (kr) com o fator (ke) [Gieras
1987], que estabelece que a tensão induzida, E, nos condutores da máquina de
indução linear é a tensão referente à onda de fluxo fundamental afetada pelo fator
de extremidade (ke), como segue:
( )es k1EE −= (3.99)
A tensão devido à onda fundamental, para um estator infinito é:
( )22
2 I.VV
V.RE
rxsx
sx
s′
−
′= (3.100)
Na presença do efeito de extremidade a tensão assume novo valor, dado por:

- 73 -
( ) ( )2"
2
22'
2
2 ..
)1(..
IVV
VRkI
VV
VRE
rxsx
sx
e
rxsx
sx
−
′=−
−
′= (3.101)
A relação entre as correntes, com e sem o ELE de Entrada, e as respectivas
tensões é:
2
2
I
I
E
E
s′
′′= (3.102)
A relação entre o fator (kr) [Simone 1996] e o fator (ke) [Gieras 1994] é:
er kk −= 1 (3.103)
A análise detalhada dos fatores de correção permite concluir que durante a
fase de projeto, algumas decisões devam ser tomadas para atenuar a influência do
ELE de Entrada no desempenho do MIL, tal como aumentar o número de polos do
MIL. Outras alternativas, como o aumento da resistividade de secundário, podem
reduzir o ELE de Entrada mas provocar uma redução do desempenho geral do MIL
e devem ser cuidadosamente observadas antes de sua efetiva implementação.
Assim, a escolha dos parâmetros do MIL fica presa a uma combinação adequada
de variáveis, para que o sucesso do projeto seja alcançado.
A forma de determinar o fator (ke), a partir de uma relação de forças,
possibilita sua inclusão no modelo matemático de forma relativamente simples,
possibilitando o cálculo da força propulsora real através da expressão:
212
1. IL
IkfX
T
ex∂
∂= obtida através da expressão (3.73)
Onde ( TI1 ) é a matriz transposta das correntes de indutor, ( 2I ) a matriz das
correntes de linor e ( 12L ) a matriz das indutâncias entre indutor e linor, função da
posição de translação.
3.31 O motor de indução linear utilizado no projeto
Foi utilizado um MIL trifásico (220 V), de quatro pólos, duplo estator curto, e
linor longo, cujo projeto baseou-se na referência [Thé Pontes, 2003]. Os pacotes do
estator possuem núcleos ferromagnéticos em chapas de aço silício. O linor em

- 74 -
forma de barra retangular não é ferromagnético sendo confeccionado em alumínio.
O MIL foi montado em estrutura especialmente projetada para ter flexibilidade de
ensaio e controle de variação do entreferro. O corte das chapas, montagem dos
pacotes, enrolamento e estrutura mecânica de sustentação foram executados em
oficina especializada, sendo os ensaios realizados no Laboratório de Máquinas
Elétricas da UFU.
A Figura 3.25 mostra uma vista geral construtiva do MIL, utilizado.
Figura 3.25 – Vista geral construtiva do MIL utilizado.
O enrolamento de cada pacote apresenta uma configuração trifásica de
quatro pólos, tendo uma distribuição em dupla camada nas nove ranhuras centrais
do estator e em monocamada nas seis ranhuras de extremidade, sendo três na
extremidade de entrada e as outras na extremidade de saída. Como pode ser visto
nas Figuras 3.26 e 3.27. Estas configurações juntamente com o alongamento dos
dentes externos (neste caso desnecessário, devido ao fato do MIL utilizado ser de
baixa velocidade) procuram suavizar os efeitos de extremidade.
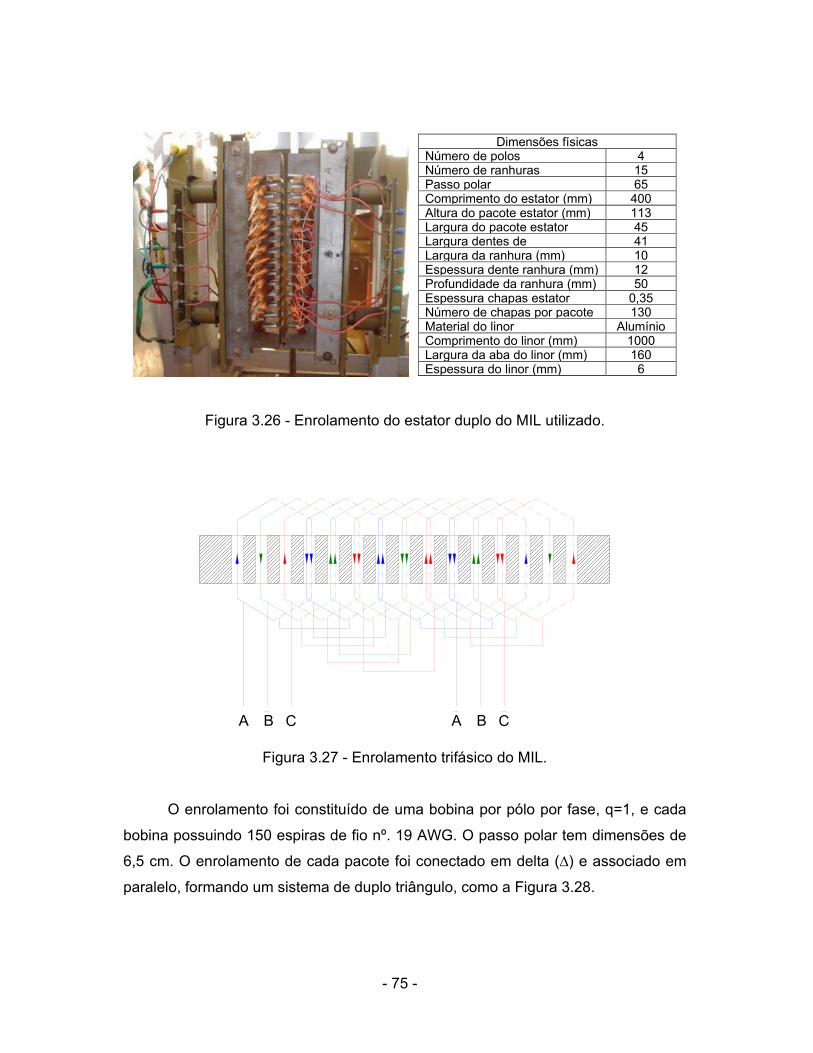
- 75 -
Figura 3.26 - Enrolamento do estator duplo do MIL utilizado.
Figura 3.27 - Enrolamento trifásico do MIL.
O enrolamento foi constituído de uma bobina por pólo por fase, q=1, e cada
bobina possuindo 150 espiras de fio nº. 19 AWG. O passo polar tem dimensões de
6,5 cm. O enrolamento de cada pacote foi conectado em delta (∆) e associado em
paralelo, formando um sistema de duplo triângulo, como a Figura 3.28.
A B C A B C
Dimensões físicas Número de polos 4 Número de ranhuras 15 Passo polar 65 Comprimento do estator (mm) 400 Altura do pacote estator (mm) 113 Largura do pacote estator 45 Largura dentes de 41 Largura da ranhura (mm) 10 Espessura dente ranhura (mm) 12 Profundidade da ranhura (mm) 50 Espessura chapas estator 0,35 Número de chapas por pacote 130 Material do linor Alumínio Comprimento do linor (mm) 1000 Largura da aba do linor (mm) 160 Espessura do linor (mm) 6

- 76 -
Figura 3.28 - Duplo delta dos pacotes primário.
3.32 Parâmetros elétricos do MIL utilizado no projeto
As resistências das fases do enrolamento primário foram extraídas de [Thé
Pontes, 2003], com os valores apresentados nas Tabelas 3.2 e 3.3, por pacote e
por fase, com a conexão dos enrolamentos em estrela paralelo.
PACOTE A
Fase Resistência em Ω A 6,2801±0,0001 B 6,3519±0,0001 C 6,3355±0,0001
Tabela 3.2 - Resistência do enrolamento primário do pacote A por fase a 35ºC
PACOTE B Fase Resistência em Ω A 6,2626±0,0001 B 6,2811±0,0001 C 6,2780±0,0001
Tabela 3.3 - Resistência do enrolamento primário do pacote B por fase a 35ºC
Na Tabela 3.4 estão apresentados os dados extraídos de [Thé Pontes, 2003],
considerando a associação em paralelo de cada pacote os valores, das resistências
( R& ) por fase , as reatâncias (Xd) de dispersão por fase, as reatâncias próprias (Xii)
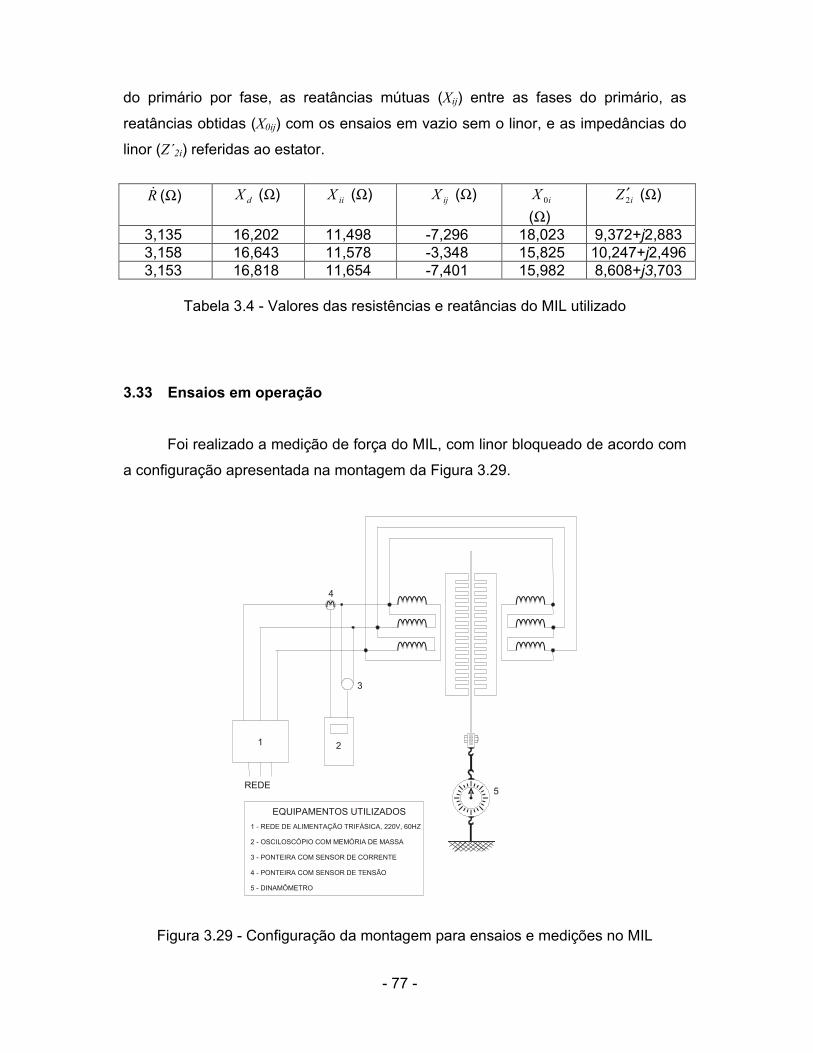
- 77 -
do primário por fase, as reatâncias mútuas (Xij) entre as fases do primário, as
reatâncias obtidas (X0ij) com os ensaios em vazio sem o linor, e as impedâncias do
linor (Z´2i) referidas ao estator.
R& (Ω) dX (Ω) iiX (Ω) ijX (Ω) iX 0
(Ω) iZ 2
′ (Ω)
3,135 16,202 11,498 -7,296 18,023 9,372+j2,883 3,158 16,643 11,578 -3,348 15,825 10,247+j2,496 3,153 16,818 11,654 -7,401 15,982 8,608+j3,703
Tabela 3.4 - Valores das resistências e reatâncias do MIL utilizado
3.33 Ensaios em operação
Foi realizado a medição de força do MIL, com linor bloqueado de acordo com
a configuração apresentada na montagem da Figura 3.29.
Figura 3.29 - Configuração da montagem para ensaios e medições no MIL
1 2
5REDE
3
4
EQUIPAMENTOS UTILIZADOS
1 - REDE DE ALIMENTAÇÃO TRIFÁSICA, 220V, 60HZ
2 - OSCILOSCÓPIO COM MEMÓRIA DE MASSA
3 - PONTEIRA COM SENSOR DE CORRENTE 4 - PONTEIRA COM SENSOR DE TENSÃO 5 - DINAMÔMETRO

- 78 -
Realizaram-se medições sob condições de operação a vazio, uma vez que a
operação do MIL no simulador, apresentou resultados de medições semelhantes
para funcionamento com carga e sem carga.
Carga
Vab (V)
Ia (A)
Vbc (V)
Ib (A)
Vcc (V)
Ic (A)
vazio 211,3 8,8 211,6 8,5 212,5 8,9
Tabela 3.5 - Módulo das tensões e correntes de fase, em condições de carga
3.34 Força medida no MIL
Os valores medidos para a força desenvolvida pelo MIL, foram poucos,
devido as características laboratoriais de ensaio. Uma parte do trabalho foi a
determinação da força desenvolvida pelo MIL, com linor travado, ou seja, a força de
partida. Os cálculos foram executados conforme o esquema da Figura 3.30.
F
P
Figura 3.30 - Ensaio para determinação da força de partida
Com a aplicação da tensão nominal nos terminais do MIL e à partir de um
peso (P) conhecido que o equilibra, pode-se escrever a expressão (3.104).

- 79 -
dx fPf += (3.104)
onde:
fx - Força desenvolvida pelo MIL no equilíbrio, representada por (F), Figura 3.30.
P - Peso do linor.
fd - Força lida no dinamômetro
Para o caso do MIL utilizado o valor medido para as grandezas (fd) e (P)
envolvidas foram:
N 147Kgf 15f d ≅=
N 58Kgf 9,5P ≅=
Assim substituindo os valores de (fd) e (P) na expressão (3.108), tem-se o
valor da força de partida do MIL.
N 205Kgf 9,20f x ≅=
O valor obtido de 205 N é aproximadamente três vezes superior a força
obtida nos ensaios obtidos de [Thé Pontes, 2003].
Tal resultado se deve ao fato de que os enrolamentos do MIL foram ligados à
rede alternada na tensão de 220 V, 60 Hz, na conexão delta paralelo, embora o MIL
fosse projetado para operação na tensão de 220 V, 60 Hz, na conexão estrela
paralelo.
A ligação do MIL em conexão delta possibilitou a geração de correntes
maiores e consequentemente aumentando os valores do campo magnético de
translação, possibilitando a geração de uma força propulsora de maior valor.
Tal artifício foi possível de ser executado sem prejuízo de danos à isolação
dos enrolamentos devido ao fato do MIL operar em pulsos de curta duração
(intervalos de tempo << 0,5 segundos).
- 80 -
CAPÍTULO IV
O SIMULADOR DA ECLUSA DE DESCARGA DE SECADOR DE
CEREAIS
4.1 Apresentação do protótipo
Objetivando a validação teórica experimental do projeto em estudo,
construiu-se um protótipo de um Simulador da eclusa de descarga de um secador
de cereais utilizando-se um MIL como acionamento, para que se pudesse obter
alguns dados para o equipamento em operação. Os parâmetros elétricos do MIL
foram obtidos de [Thé Pontes, 2003], conforme citado no capítulo anterior, e
também foi verificado o comportamento do MIL sob condição de operação à vazio,
devido ao fato de que o equipamento trabalhando com carga apresentou condições
de funcionamento semelhantes. Foi analisado o comportamento elétrico do MIL na
aquisição das formas de onda de tensão e corrente, nos regimes de ciclo completo,
nas fases inicial, intermediária e final, de operação no Simulador, para que fosse
possível determinar a potência do MIL durante o regime de operação, assim como a
energia consumida durante este ciclo. Foi feito também, medições da força
propulsora do MIL com a tomada de medição na estrutura da eclusa do Simulador,
para que se pudesse ter um parâmetro do valor de força desenvolvida pelo MIL, e
estabelecer comparações com a força produzida pelo acionador do Sistema
Convencional.
4.2 Introdução
Foi desenvolvido e construído um equipamento com escala reduzida em
capacidade de fluxo, para que se pudesse fazer a simulação de descarga de um
secador de cereais, dentro da área de oficina mecânica da BAGEL. Neste
equipamento denominado de Simulador da eclusa de descarga de secador de
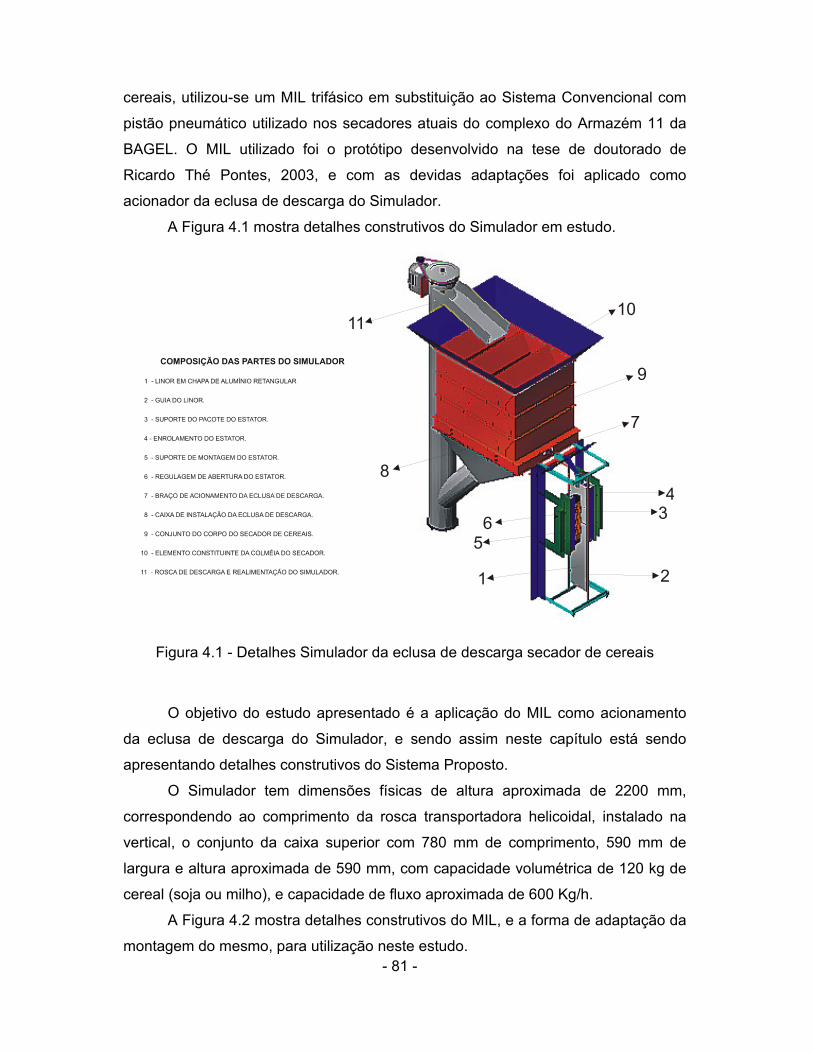
- 81 -
cereais, utilizou-se um MIL trifásico em substituição ao Sistema Convencional com
pistão pneumático utilizado nos secadores atuais do complexo do Armazém 11 da
BAGEL. O MIL utilizado foi o protótipo desenvolvido na tese de doutorado de
Ricardo Thé Pontes, 2003, e com as devidas adaptações foi aplicado como
acionador da eclusa de descarga do Simulador.
A Figura 4.1 mostra detalhes construtivos do Simulador em estudo.
Figura 4.1 - Detalhes Simulador da eclusa de descarga secador de cereais
O objetivo do estudo apresentado é a aplicação do MIL como acionamento
da eclusa de descarga do Simulador, e sendo assim neste capítulo está sendo
apresentando detalhes construtivos do Sistema Proposto.
O Simulador tem dimensões físicas de altura aproximada de 2200 mm,
correspondendo ao comprimento da rosca transportadora helicoidal, instalado na
vertical, o conjunto da caixa superior com 780 mm de comprimento, 590 mm de
largura e altura aproximada de 590 mm, com capacidade volumétrica de 120 kg de
cereal (soja ou milho), e capacidade de fluxo aproximada de 600 Kg/h.
A Figura 4.2 mostra detalhes construtivos do MIL, e a forma de adaptação da
montagem do mesmo, para utilização neste estudo.
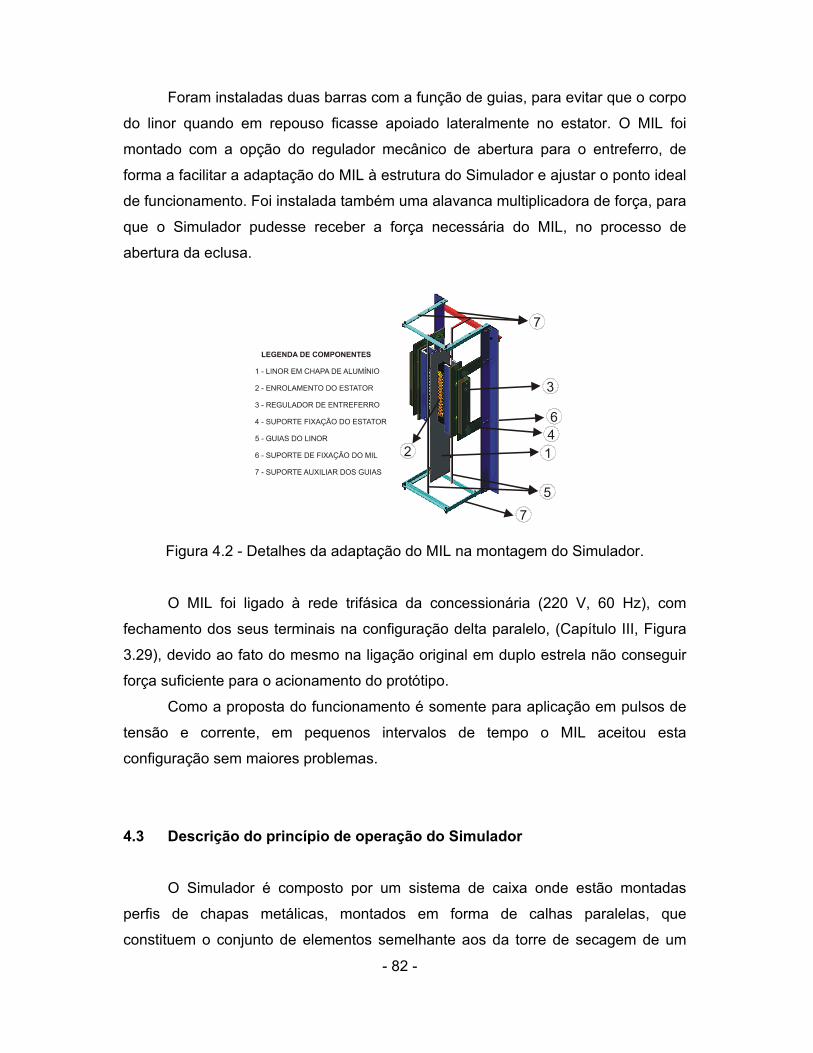
- 82 -
Foram instaladas duas barras com a função de guias, para evitar que o corpo
do linor quando em repouso ficasse apoiado lateralmente no estator. O MIL foi
montado com a opção do regulador mecânico de abertura para o entreferro, de
forma a facilitar a adaptação do MIL à estrutura do Simulador e ajustar o ponto ideal
de funcionamento. Foi instalada também uma alavanca multiplicadora de força, para
que o Simulador pudesse receber a força necessária do MIL, no processo de
abertura da eclusa.
Figura 4.2 - Detalhes da adaptação do MIL na montagem do Simulador.
O MIL foi ligado à rede trifásica da concessionária (220 V, 60 Hz), com
fechamento dos seus terminais na configuração delta paralelo, (Capítulo III, Figura
3.29), devido ao fato do mesmo na ligação original em duplo estrela não conseguir
força suficiente para o acionamento do protótipo.
Como a proposta do funcionamento é somente para aplicação em pulsos de
tensão e corrente, em pequenos intervalos de tempo o MIL aceitou esta
configuração sem maiores problemas.
4.3 Descrição do princípio de operação do Simulador
O Simulador é composto por um sistema de caixa onde estão montadas
perfis de chapas metálicas, montados em forma de calhas paralelas, que
constituem o conjunto de elementos semelhante aos da torre de secagem de um
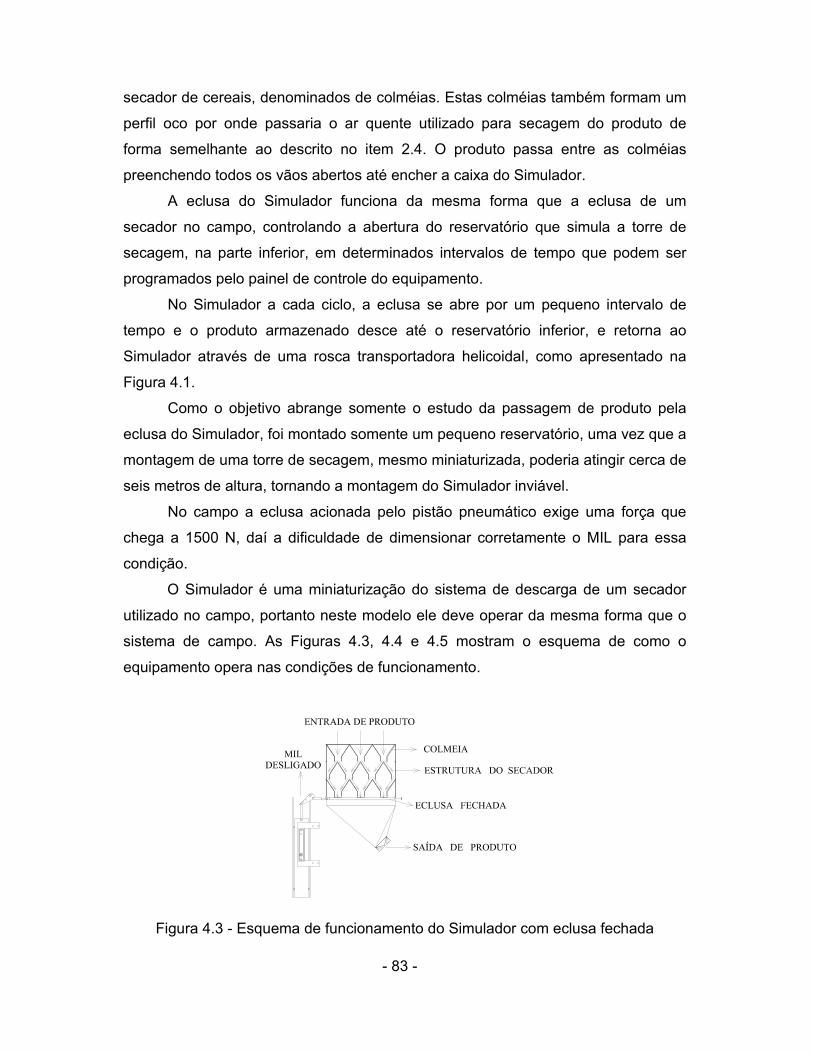
- 83 -
secador de cereais, denominados de colméias. Estas colméias também formam um
perfil oco por onde passaria o ar quente utilizado para secagem do produto de
forma semelhante ao descrito no item 2.4. O produto passa entre as colméias
preenchendo todos os vãos abertos até encher a caixa do Simulador.
A eclusa do Simulador funciona da mesma forma que a eclusa de um
secador no campo, controlando a abertura do reservatório que simula a torre de
secagem, na parte inferior, em determinados intervalos de tempo que podem ser
programados pelo painel de controle do equipamento.
No Simulador a cada ciclo, a eclusa se abre por um pequeno intervalo de
tempo e o produto armazenado desce até o reservatório inferior, e retorna ao
Simulador através de uma rosca transportadora helicoidal, como apresentado na
Figura 4.1.
Como o objetivo abrange somente o estudo da passagem de produto pela
eclusa do Simulador, foi montado somente um pequeno reservatório, uma vez que a
montagem de uma torre de secagem, mesmo miniaturizada, poderia atingir cerca de
seis metros de altura, tornando a montagem do Simulador inviável.
No campo a eclusa acionada pelo pistão pneumático exige uma força que
chega a 1500 N, daí a dificuldade de dimensionar corretamente o MIL para essa
condição.
O Simulador é uma miniaturização do sistema de descarga de um secador
utilizado no campo, portanto neste modelo ele deve operar da mesma forma que o
sistema de campo. As Figuras 4.3, 4.4 e 4.5 mostram o esquema de como o
equipamento opera nas condições de funcionamento.
Figura 4.3 - Esquema de funcionamento do Simulador com eclusa fechada

- 84 -
A Figura 4.4 mostra detalhe de ligação do acoplamento mecânico do linor à
eclusa do Simulador.
Figura 4.4 – Detalhe do acoplamento mecânico entre o linor e a eclusa.
Figura 4.5 - Esquema de funcionamento do Simulador com eclusa aberta.
4.4 Parâmetros obtidos do MIL no simulador em operação
A determinação dos parâmetros do MIL, está baseada nos ensaios de acordo
com a montagem experimental apresentada na Figura 4.6, bem como os
necessários equipamentos de medição.
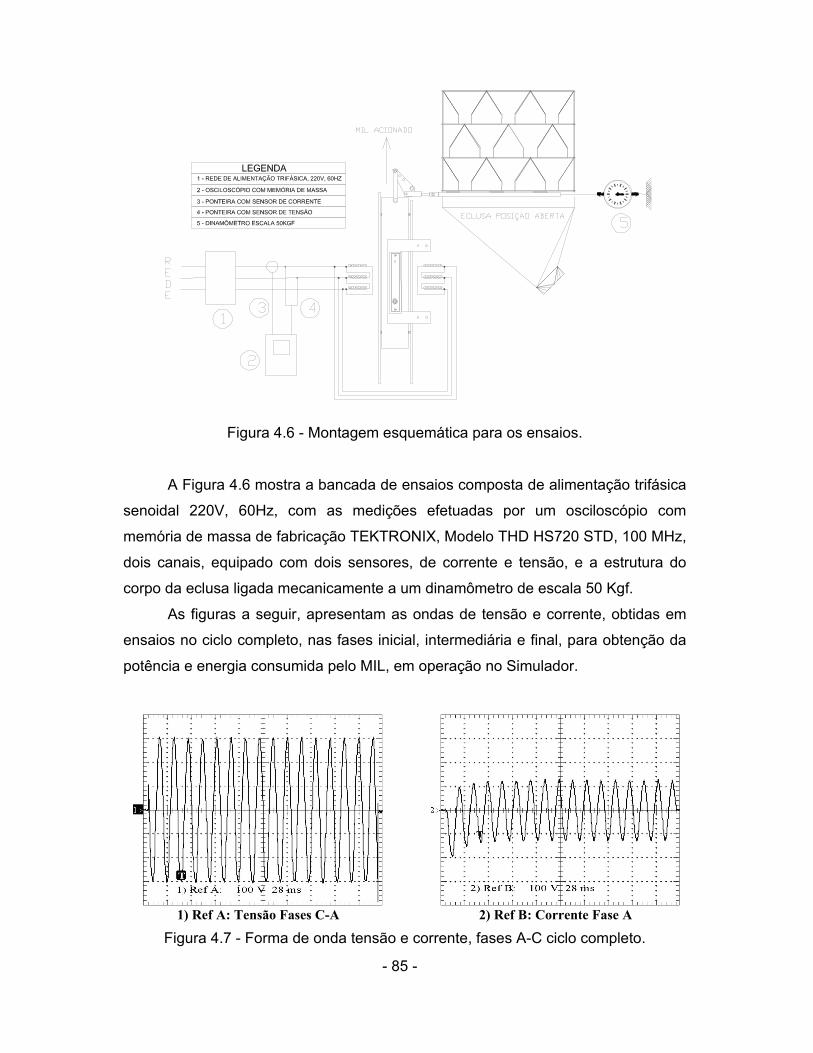
- 85 -
Figura 4.6 - Montagem esquemática para os ensaios.
A Figura 4.6 mostra a bancada de ensaios composta de alimentação trifásica
senoidal 220V, 60Hz, com as medições efetuadas por um osciloscópio com
memória de massa de fabricação TEKTRONIX, Modelo THD HS720 STD, 100 MHz,
dois canais, equipado com dois sensores, de corrente e tensão, e a estrutura do
corpo da eclusa ligada mecanicamente a um dinamômetro de escala 50 Kgf.
As figuras a seguir, apresentam as ondas de tensão e corrente, obtidas em
ensaios no ciclo completo, nas fases inicial, intermediária e final, para obtenção da
potência e energia consumida pelo MIL, em operação no Simulador.
Figura 4.7 - Forma de onda tensão e corrente, fases A-C ciclo completo.
1) Ref A: Tensão Fases C-A
2) Ref B: Corrente Fase A
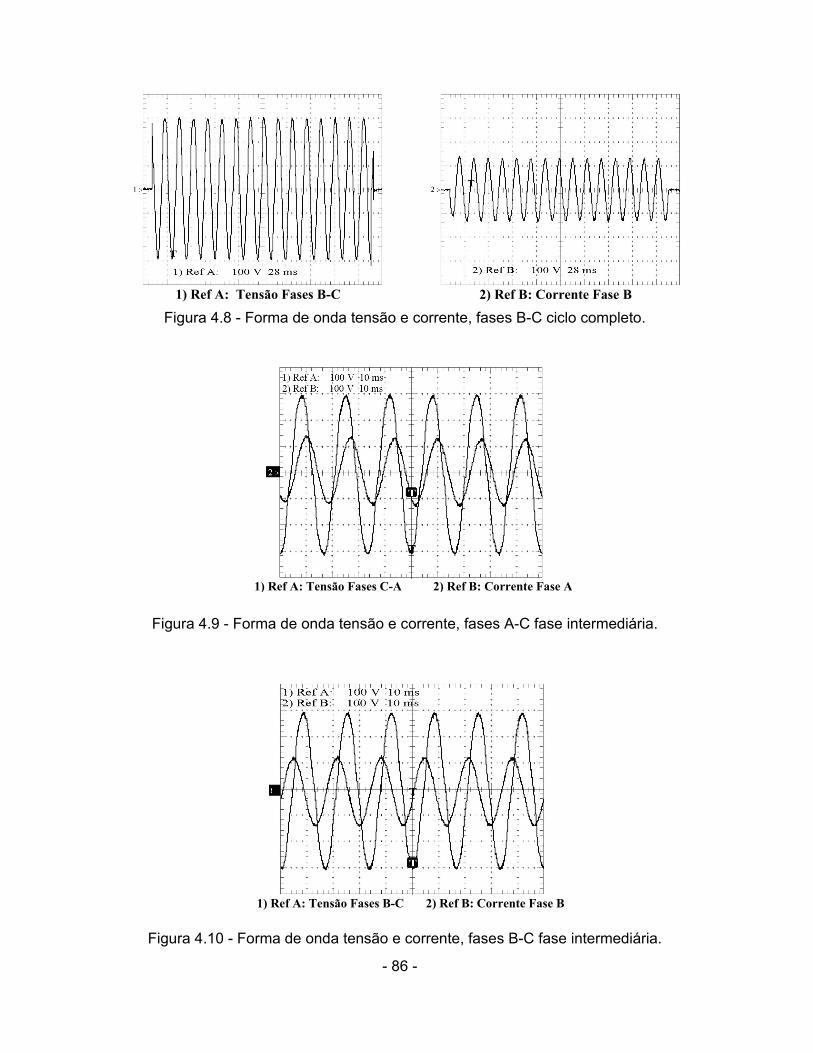
- 86 -
Figura 4.8 - Forma de onda tensão e corrente, fases B-C ciclo completo.
Figura 4.9 - Forma de onda tensão e corrente, fases A-C fase intermediária.
Figura 4.10 - Forma de onda tensão e corrente, fases B-C fase intermediária.
1) Ref A: Tensão Fases C-A 2) Ref B: Corrente Fase A
1) Ref A: Tensão Fases B-C
2) Ref B: Corrente Fase B
1) Ref A: Tensão Fases B-C 2) Ref B: Corrente Fase B

- 87 -
Figura 4.11 - Forma de onda de tensão e corrente, fases C-A fase inicial.
Figura 4.12 - Forma de onda de tensão e corrente, fases B-C fase inicial.
Figura 4.13 - Forma de onda de tensão e corrente, fases C-A fase final.
1) Ref A: Tensão Fases C-A
2) Ref B: Corrente Fase A
1) Ref A: Tensão Fases B-C
2) Ref B: Corrente Fase B
2) Ref B: Corrente Fase A
1) Ref A: Tensão Fases C-A

- 88 -
Figura 4.14 - Forma de onda de tensão e corrente, fases B-C fase final.
As formas de onda apresentadas nas Figuras 4.7 a 4.14, se referem às fases
C-A e B-C para as ondas das tensões, e às fases A e B para as ondas de correntes.
O método adotado para obtenção dos dados dos ensaios foi o método dos 02
Wattímetros, utilizando-se a fase C como referência.
Foram efetuadas também, medições da força propulsora desenvolvida pelo
MIL, com tomadas de medição no linor e na estrutura da eclusa do Simulador.
4.5 Resultados obtidos do Simulador com o MIL em operação
Das Figuras 4.7 a 4.14, e dos dados obtidos no ensaio do MIL acionando a
eclusa de descarga do Simulador, chegou-se aos resultados apresentados nas
Tabelas 4.1 e 4.2. Os dados foram importados para um micromputador e revelados
pelo software WaveStar Version 1.2.2.
Os dados obtidos foram processados por um programa de integração
numérica, desenvolvido em linguagem C, pelo Laboratório de Máquinas Elétricas da
Universidade Federal de Uberlândia - MG.
As Tabelas 4.1 e 4.2 apresentam os resultados finais dos dados processados
pelo programa de integração numérica, extraídos das medições dos ensaios, para o
MIL acionando a eclusa do Simulador.
1) Ref A: Tensão Fases B-C
2) Ref B: Corrente Fase B

- 89 -
RESULTADOS OBTIDOS PELO MÉTODO DOS 02 WATÍMETROS
GRANDEZAS VALORES
Tensão eficaz fases C-A 215,090897 V
Tensão eficaz fases B-C 211,094604 V
Corrente eficaz fase A 8,890188 A
Corrente eficaz fase B 9,210502 A
Potência Ativa fases C-A 1428,480957 W
Potência Ativa fases B-C 320,0769650 W
Potência Reativa fases C-A 1271,198486 VAR
Potência Reativa fases B-C 1917,760010 VAR
Fator de potência fases C-A 0,747036
Fator de potência fases B-C 0,164624
Força medida na eclusa 23 KGF
Tabela 4.1 - Resultados obtidos para o MIL com o Simulador em operação.
RESULTADOS OBTIDOS FINAL
GRANDEZAS GRANDEZAS
Potência Ativa Total 1748,557922 W
Potência Reativa Total 3188,958496 VAR
Fator de potência 0,480784885
Tensão nominal aplicada 220 V
Força máxima aplicada na eclusa 23 KGF
Tempo máximo de operação 0,2 segundos
Energia consumida por pulso 0,097142106 Wh
Temperatura de operação 30 ºC
Tabela 4.2 - Resultados obtidos para o MIL das medições no Simulador.
Dos gráficos apresentados nas Figuras 4.7 a 4.14, podemos verificar que:
• Não houve queda de tensão acentuada durante o processo de partida
e parada do MIL.
• Da mesma forma, a rampa da corrente de partida causa poucas
perturbações no sistema.
• Não foi verificada influência expressiva devido a presença de
transitórios de corrente ou tensão durante a partida do MIL.

- 90 -
• No regime permanente do MIL as tensões e corrente permanecem
estáveis.
• No final do ciclo de funcionamento da eclusa o MIL não apresenta
transitórios de corrente.
• O fator de potência muito baixo do MIL, é devido às características
construtivas do MIL.
• A força obtida na eclusa do Simulador (23 Kgf) é um valor bem menor
em relação ao esperado.
• A energia consumida pelo MIL em cada ciclo de descarga foi um valor
baixo, devido ao fato da operação do mesmo se proceder em
pequenos intervalos de tempo.
A Figura 4.15 apresenta uma foto do Simulador no local de sua construção
dentro da oficina da BAGEL.
Figura 4.15 – Fotografia do Simulador dentro da oficina mecânica da BAGEL.

- 91 -
CAPÍTULO V
ESTUDO COMPARATIVO ENTRE O SISTEMA CONVENCIONAL E O
SISTEMA PROPOSTO
5.1 Descrição funcional do Sistema Convencional
A Figura 5.1, apresenta o diagrama funcional de comando e acionamento
para o Sistema Convencional descrito no Capítulo II, no item 2.4.
Figura 5.1 - Diagrama elétrico funcional da eclusa no Sistema Convencional.
Na descrição de funcionamento, tem-se um sistema de controle e
acionamento para o conjunto do compressor, habilitado por um pressostato, o qual
é calibrado para atuar o motor do compressor sempre que a pressão do reservatório
estiver abaixo de 100 Psi, e desligá-lo quando a pressão exceder 125 Psi. Um fim
de curso atua como sistema de segurança para que o curso da eclusa não
ultrapasse os seus limites mecânicos de atuação. Dois relés auxiliares atuam na
válvula solenóide de cinco vias que controla o pistão pneumático na abertura e
fechamento da eclusa. Estes relés são habilitados por três relés temporizados, que
controlam o tempo e o retardo de abertura e o outro o tempo em que a eclusa

- 92 -
permanece fechada. A calibração dos tempos de abertura, retardo e fechamento da
eclusa, devem ser feitos com o equipamento em operação, e realizados por pessoal
especialmente treinados e profundos conhecedores do processo de descarga dos
secadores para que a operação do sistema funcione de forma eficiente.
5.2 Descrição do sistema utilizando motor de indução linear
No Sistema Proposto foi instalado um MIL substituindo o pistão pneumático e
todos os itens descritos na Figura 2.3, Capítulo II, foram retirados para a montagem
do novo sistema. A adaptação mecânica do MIL foi efetuada de forma simples. O
painel de comando e acionamento utilizado no Sistema Convencional foi
simplificado, com reaproveitamento dos componentes na elaboração e montagem
do painel do Sistema Proposto, uma vez que o diagrama funcional se tornou mais
simples.
O sistema utilizando motor linear está esquematizado na Figura 5.2 e o
diagrama funcional de comando e acionamento está apresentado na Figura 5.3.
Figura 5.2 - Esquema de funcionamento da eclusa utilizado o MIL
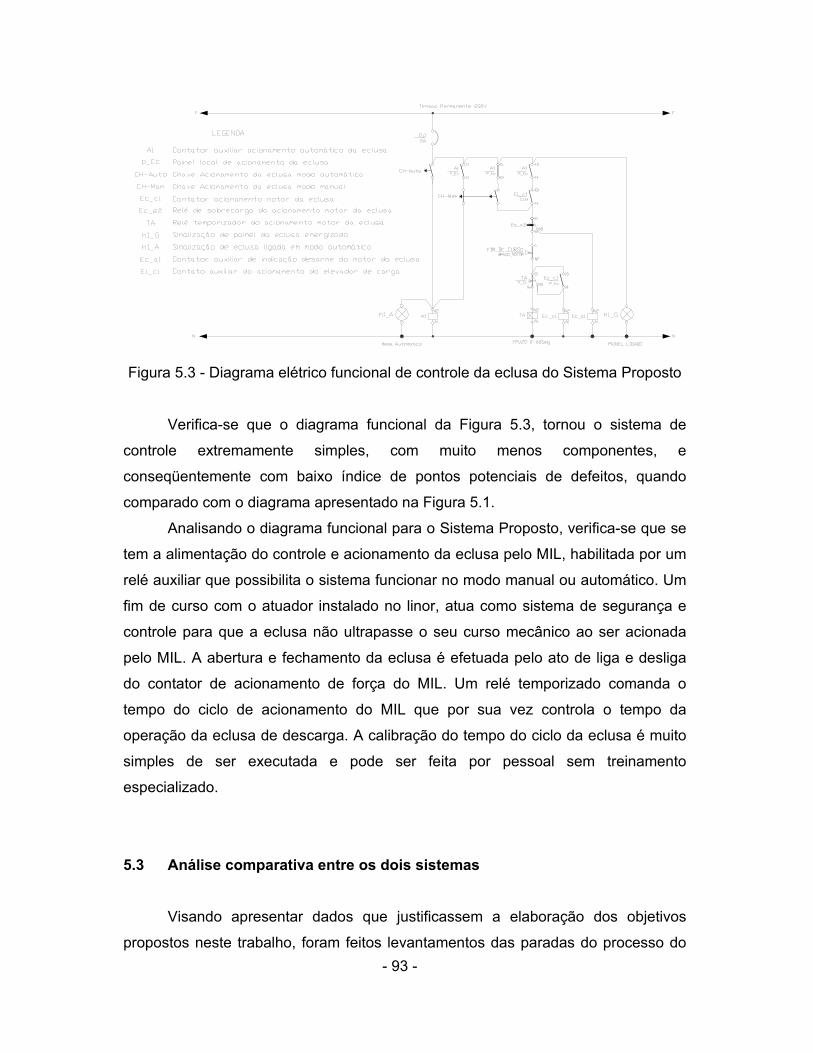
- 93 -
Figura 5.3 - Diagrama elétrico funcional de controle da eclusa do Sistema Proposto
Verifica-se que o diagrama funcional da Figura 5.3, tornou o sistema de
controle extremamente simples, com muito menos componentes, e
conseqüentemente com baixo índice de pontos potenciais de defeitos, quando
comparado com o diagrama apresentado na Figura 5.1.
Analisando o diagrama funcional para o Sistema Proposto, verifica-se que se
tem a alimentação do controle e acionamento da eclusa pelo MIL, habilitada por um
relé auxiliar que possibilita o sistema funcionar no modo manual ou automático. Um
fim de curso com o atuador instalado no linor, atua como sistema de segurança e
controle para que a eclusa não ultrapasse o seu curso mecânico ao ser acionada
pelo MIL. A abertura e fechamento da eclusa é efetuada pelo ato de liga e desliga
do contator de acionamento de força do MIL. Um relé temporizado comanda o
tempo do ciclo de acionamento do MIL que por sua vez controla o tempo da
operação da eclusa de descarga. A calibração do tempo do ciclo da eclusa é muito
simples de ser executada e pode ser feita por pessoal sem treinamento
especializado.
5.3 Análise comparativa entre os dois sistemas
Visando apresentar dados que justificassem a elaboração dos objetivos
propostos neste trabalho, foram feitos levantamentos das paradas do processo do
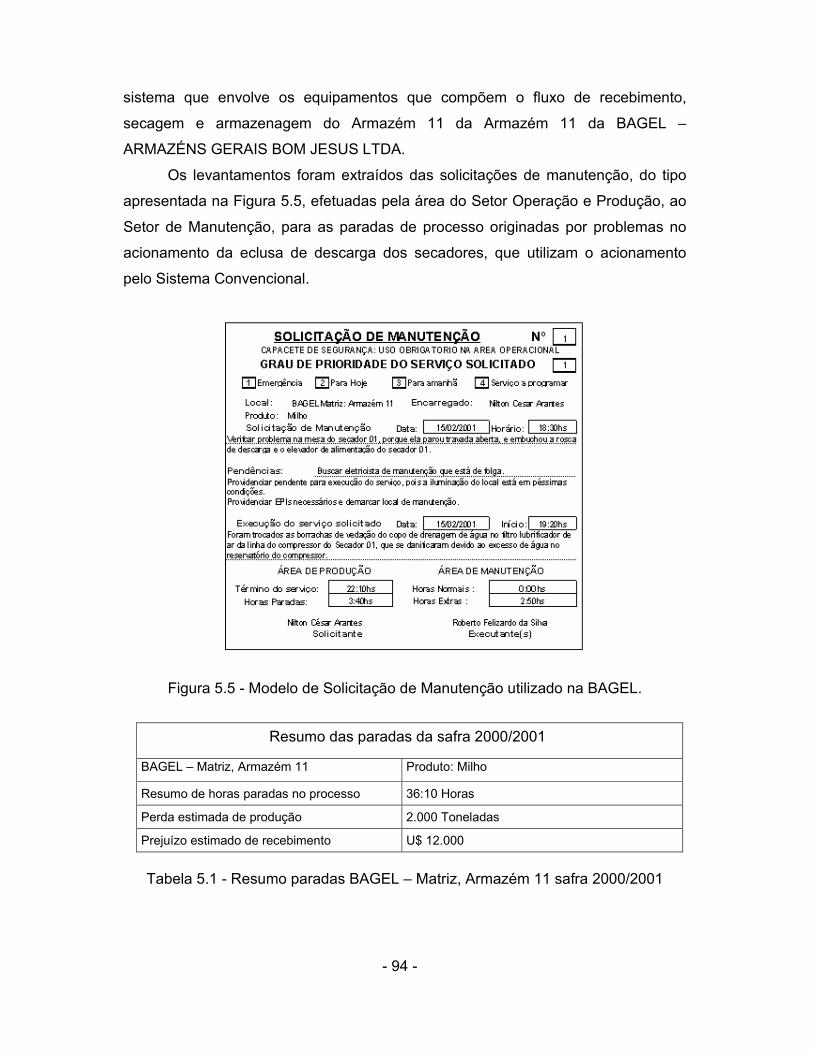
- 94 -
sistema que envolve os equipamentos que compõem o fluxo de recebimento,
secagem e armazenagem do Armazém 11 da Armazém 11 da BAGEL –
ARMAZÉNS GERAIS BOM JESUS LTDA.
Os levantamentos foram extraídos das solicitações de manutenção, do tipo
apresentada na Figura 5.5, efetuadas pela área do Setor Operação e Produção, ao
Setor de Manutenção, para as paradas de processo originadas por problemas no
acionamento da eclusa de descarga dos secadores, que utilizam o acionamento
pelo Sistema Convencional.
Figura 5.5 - Modelo de Solicitação de Manutenção utilizado na BAGEL.
Resumo das paradas da safra 2000/2001
BAGEL – Matriz, Armazém 11 Produto: Milho
Resumo de horas paradas no processo 36:10 Horas
Perda estimada de produção 2.000 Toneladas
Prejuízo estimado de recebimento U$ 12.000
Tabela 5.1 - Resumo paradas BAGEL – Matriz, Armazém 11 safra 2000/2001

- 95 -
Resumo das paradas da safra 2001/2002
BAGEL – Matriz, Armazém 11 Produto: Soja
Resumo de horas paradas no processo 28:00 Horas
Perda estimada de produção 1.500 Toneladas
Prejuízo estimado de recebimento U$ 10.000
Tabela 5.2 - Resumo paradas BAGEL – Matriz, Armazém 11 safra 2001/2002
Resumo das paradas da safra 2002/2003
BAGEL – Matriz, Armazém 11 Produto: Soja
Resumo de horas paradas no processo 23:00 Horas
Perda estimada de produção 1.200 Toneladas
Prejuízo estimado de recebimento U$ 8.000
Tabela 5.3 - Resumo das paradas BAGEL – Matriz, Armazém 11 safra 2002/2003
As Tabelas 5.1, 5.2 e 5.3, apresentam relatórios resumidos das principais
paradas de processo, referentes a problemas ou defeitos decorrentes no sistema de
acionamento da eclusa dos secadores que compõem o sistema de armazenagem
de cereais, do Armazém 11 da BAGEL nos anos 2001, 2002, 2003
respectivamente.
O Simulador foi projetado para operação com fluxo de produção de
aproximadamente 6 toneladas de produto por hora, o que corresponde a uma
capacidade dez vezes menor do que a do equipamento de campo.
Um secador de cereais com capacidade de 60 toneladas de produto por
hora, com acionamento da eclusa de descarga pelo Sistema Convencional, utiliza
um conjunto constituído por um compressor de 10 pés cúbicos por hora, motor
elétrico trifásico de 4 CV, 4 polos, uma válvula solenóide de 04 ou 05 vias e um
pistão pneumático de curso aproximadamente 14 cm, com êmbolo de 7 cm de
diâmetro.
No Simulador utilizando um MIL de pequena potência o sistema do conjunto
compressor foi substituído por um conjunto menor, capaz de acionar a eclusa do
Simulador, utilizando um motor trifásico de potência 0,5 CV.

- 96 -
As Tabelas 5.4 e 5.5 e 5.6 apresentam análises comparativas para os dois
sistemas.
Parâmetros utilizados Sistema Convencional Sistema Proposto Motor (CV) 0,5 2,4 Fator de utilização 0,85 1 Nº operações por minuto 6 6 Nº operações por hora 360 360 Tempo de operação por dia (horas) 24 1,2 Período analisado em dias 30 30 Tarifa de energia (kWh ponta tarifa verde CELG) 0,88266 0,88266 Tarifa de energia (kWh fps tarifa verde CELG) 0,10808 0,10808 Tarifa de energia (kW tarifa verde CELG) 10,34 10,34 Consumo por acionamento em Wh 0,028 0,245 Consumo mensal em kWh 2,106 0,245 Custo mensal em R$ 29,54 3,44
Tabela 5.4 - Análise comparativa I, Sistema Convencional x Sistema Proposto.
Comparação de resultados obtidos considerando o Simulador em operação com Sistema Convencional e com o Sistema Proposto no período de 1 mês
Parâmetros utilizados Sistema Convencional Sistema Proposto Comparação
Potência do motor (CV) 0,5 2,4 -480%
Consumo (kWh) 228,42 63,50 360%
Custo da energia (U$) 21,87 6,07 360%
Tabela 5.5 - Análise comparativa II, Sistema Convencional x Sistema Proposto.
Simulação de resultados esperados com a substituição do Sistema Convencional pelo
Sistema Proposto nos 03 períodos anuais analisados
Parâmetros utilizados Sistema Convencional Sistema Proposto Comparação
Horas paradas (h) 87 10,75 809%
Perda Produtiva (Ton) 3700 700 528%
Valor das perdas (U$) 30.000 5.000 600%
Tabela 5.6 - Análise comparativa III, Sistema Convencional x Sistema Proposto.
Os valores de custos e consumo de energia obtidos da operação do
Simulador podem ser considerados reais, porque se aproximam muito dos
resultados esperados e obtidos do sistema de campo, considerando-se as devidas
escalas construtivas.

- 97 -
O valor de 10,75 horas de parada creditados ao Sistema Proposto na Tabela
V.6, foram obtidos da utilização do sistema alternativo, desenvolvido pela equipe
técnica do Departamento de Manutenção da BAGEL, apresentado no Capítulo II,
Figura 2.4. A justificativa vem do fato de que o Sistema Proposto apresenta menos
pontos de defeito, portanto pode-se admitir que os seus tempos de parada sejam
iguais ou menores que os apresentados pelo sistema alternativo apresentado.
A composição das tabelas para os custos da energia foi feito tomando-se os
valores de custos de fornecimento de energia da CELG (Companhia Energética de
Goiás), referente ao mês de Abril de 2005, para consumidor, Horosazonal Subgrupo
A4, modalidade Verde, incluído no benefício da Sazonalidade para utilização de
energia.
A composição dos custos estimados para perdas de produção foi baseada
nos contratos anuais entre a BAGEL e as empresas contratantes dos serviços para
secagem e armazenagem, no valor de U$ 7,5 por tonelada de produto.
Os cálculos foram efetuados tomando-se como referência a cotação do dólar
em Abril de 2005, na proporção (U$ 1 = R$ 2,50).
Da Tabela 5.5 pode-se verificar comparativamente, que embora o protótipo
utilize um MIL com potência 480% maior, em relação ao motor utilizado no Sistema
Convencional, ele tem um consumo e um custo de energia elétrica
aproximadamente 360% menor. A contribuição da demanda no custo final é muito
pequena e por isso não foi computada nos cálculos, mas a mesma deverá ser
levada em conta no caso do Sistema Convencional normal.
Dos dados obtidos das Tabelas 5.1, 5.2 e 5.3 verifica-se que o Sistema
Convencional tem um potencial na proporção de oito para um possibilidades de
defeitos em relação ao Sistema Proposto, o que traria em um valor em torno de
10:45 horas (Obtidos da utilização do sistema alternativo e creditados para o
sistema Proposto, desenvolvido pela equipe técnica do Departamento de
Manutenção da BAGEL), de parada em relação às 87:10 horas contabilizadas nos
três períodos analisados. Consequentemente estas alterações acarretariam uma
perda produtiva de 700 toneladas de produto (U$ 5.000) no Sistema Proposto,
contra as 3700 toneladas (U$ 30.000), contabilizadas para o Sistema Convencional.

- 98 -
CAPÍTULO VI
CONCLUSÕES
6.1 Considerações sobre o projeto do Simulador
O Simulador foi projetado para simular o funcionamento da eclusa de um
secador de cereais. Não foi considerada a pressão que a massa de grãos exerce
sobre as bandejas do conjunto da eclusa. Mesmo assim não houve nenhum
prejuízo na obtenção dos dados necessários ao seu funcionamento, que pudessem
comprometer os resultados dos objetivos deste trabalho, uma vez que a proposta foi
obter uma solução que apresentasse baixo índice de defeitos, constituição simples
e robusta, baixa manutenção, inovação tecnológica, eficiência produtiva e
energética.
Assim sendo as fontes geradoras de problemas que poderiam ocasionar
paradas, estão concentradas nos seguintes locais:
• Sistema elétrico de alimentação.
• Acionamento e controle da eclusa de descarga.
• Acoplamento mecânico entre o MIL e a eclusa.
• Sistema mecânico estrutural da eclusa de descarga.
• Ajuste e operação do sistema de descarga.
• Subdimensionamento do motor linear para a força necessária.
Um dos itens descritos acima pode ser verificado na observação final do
Capítulo IV, onde a força obtida na eclusa do Simulador (23 Kgf) é um valor bem
menor em relação ao esperado (acima de 40 Kgf).
A adaptação do MIL à eclusa foi efetuada através de uma alavanca
multiplicadora de força de relação (1:2,8). O valor da força obtido na barra do linor
(15 Kgf) teve uma multiplicação muito pequena, devido ao fato de que na execução
do projeto não houve preocupação com a minimização das perdas por atrito na
articulação do acoplamento mecânico.

- 99 -
Outro fato verificado no Sistema Proposto foi que os motivos de parada foram
reduzidos a somente seis possibilidades contra mais de quarenta, quando
comparados ao Sistema Convencional.
Entretanto o MIL possui características particulares que devem ser
obedecidas na adaptação para acionamento da eclusa de descarga dos Secadores
de Cereais, e as principais podem ser identificadas como:
• Definição da velocidade de operação e força propulsora do MIL, uma
vez que o tempo de abertura e fechamento da eclusa deve obedecer a
critérios de tempo definidos (1,5 segundos).
• Definição da força propulsora de operação do MIL, considerando que
a força aplicada pelo pistão pneumático no Sistema Convencional é
considerada muito grande, acima de 1500 Newtons.
• O pistão pneumático é um equipamento de alto rendimento, sendo por
isso, muito utilizado neste tipo de aplicações, visto que ocupa pequeno
espaço físico, e é capaz de produzir forças elevadas com pequenas
pressões de ar. Sendo assim o espaço do local da aplicação pode se
tornar um problema para instalação, uma vez que o MIL com força
equivalente ao pistão pneumático utilizado poderá ocupar um espaço
físico bem maior que o existente atual.
• Para que se possa produzir a força de um pistão pneumático,
utilizando um motor linear de forças pequenas, devido a problemas de
espaço, devem-se utilizar braços mecânicos multiplicadores de força,
o que pode ser um inconveniente, devido ao fato de ter que observar a
influência do atrito, alinhamento e engrenamento nas articulações
mecânicas.
6.2 Conclusões gerais
O acionamento da mesa por motores de indução linear passa a ser visto
como uma ótima aplicação, com minimização de pontos de manutenção, visto que a
maior parcela da potência utilizada na transmissão do movimento é realizada de
forma a utilizar os rolamentos e mancais como sistema de guia e apoio para as
- 100 -
partes móveis, de forma que não exige esforços radiais e axiais como acontece no
motor de indução rotativo, diminuindo assim os desgastes das partes mecânicas.
Sobre o MIL, podemos concluir que em relação à proposta inicial para
elaboração deste trabalho, se observado as suas características pode vir a ser uma
ótima solução para obtenção de melhoria de resultados na área da descarga de
secadores de cereais.
O fato do MIL operar em pulsos com intervalos de curta duração, possibilitou
o mesmo ser ligado em uma tensão superior (delta paralelo), em relação ao seu
projeto inicial (estrela paralelo), possibilitando assim a geração de forças
propulsoras maiores.
A possibilidade da operação do MIL em pulsos de tensão e corrente em
pequenos intervalos de tempo, fez com que o Sistema Proposto pudesse
apresentar menor consumo de energia, comparado ao Sistema Convencional.
As diferenças apresentadas na diminuição dos tempos de parada,
apresentam aumento de ganho operacional e produtivo, com valores que viabilizam
o investimento para realização de modificações do Sistema Convencional para o
Sistema Proposto.
Sobre o projeto do Simulador utilizando o MIL como acionamento da eclusa
de descarga, podemos concluir que o mesmo atendeu perfeitamente os objetivos da
proposta deste trabalho, para os critérios apresentados de:
• Diminuir o índice de defeitos
• Constituição simples e robusta
• Baixa manutenção.
• Inovação tecnológica para o setor.
• Melhoria produtiva e
• Diminuição do consumo de energia.
6.3 Proposta para trabalhos futuros
Durante a realização deste trabalho, vários pontos foram levantados com
alguns questionamentos que poderão servir de base para trabalhos futuros que
poderiam abranger:
- 101 -
• Análise da interferência do MIL no sistema elétrico da automação de
processos na rede de comunicação de dados, nos critérios da
Qualidade de Energia.
• A operação do MIL em regime de funcionamento por pulsos de tensão
e corrente de curta duração, trouxe a possibilidade do mesmo ser
ligado em uma tensão acima da tensão de projeto e assim produzir
forças bem superiores às verificadas nos trabalhos anteriores.
Entretanto não foi possível estabelecer os limites deste tipo de
aplicação.
• A utilização do MIL como solução para economia de energia.
• Como o MIL dispensa o uso de acessórios mecânicos, a sua utilização
em substituição aos atuadores lineares pneumáticos poderia trazer
grandes resultados na diminuição dos tempos de manutenção.
• Existem várias empresas que utilizam atuadores a motores lineares,
entretanto há pouca tecnologia dos mesmos aplicados a
posicionadores.
• Projeto de um sistema de secagem de cereais completo com
atuadores lineares, comando e controle por CLP, com estimativa de
custos de implantação e manutenção.
• Operação continuada do sistema de secagem de cereais para estudar
as características de manutenção.
• Instalar um “encoder” linear para analisar melhor o desempenho.

- 102 -
REFERÊNCIA BIBLIOGRÁFICA
[1] Thé Pontes, Ricardo S. Modelagem do motor de indução linear
baseando-se na equivalência com o motor rotativo. Universidade Federal de
Uberlândia - UFU, 2003. Tese de doutorado.
[2] CREPPE, R. C. Uma Contribuição a Modelagem de Máquinas de
Indução Lineares. Campinas – SP. Universidade Estadual de Campinas (UNICAMP)
1997. Tese de doutorado.
[3] CREPPE, R. C. Circuito Elétrico Equivalente para Conversores
Assíncronos Lineares. Campinas – SP. Universidade Estadual de Campinas
(UNICAMP) 1992. Dissertação de Mestrado.
[4] SIMONE, G.A. Uma contribuição ao Estudo dos Conversores
Assíncronos Lineares. Uberlândia - MG. Universidade Federal de Uberlândia, 1989.
Dissertação de Mestrado.
[5] SIMONE, G. A. Máquinas de Indução Trifásicas: Teoria e Exercícios.
São Paulo: Editora Érica, 2000.
[6] SIMONE, G. A. Conversores Assíncronos Lineares de Dupla Face –
Teoria e Projeto. Campinas – SP. Universidade Estadual de Campinas (UNICAMP)
1992. Tese de Doutorado.
[7] LAITHWAITE, E. R. Linear Electric Machines – A personal view
Proceedings of the IEEE, v. 63, n. 2, p. 250-290, 02-1975.
[8] YAMAMURA, S. Theory of Linear Induction Motors. 2ª ed. Tokyo:
University of Tokyo Press, 1972.
[9] GUERRINI, D. P. Contribuição ao Estudo de Motores Lineares de
Indução. São Carlos – SP. Escola de Engenharia de São Carlos - USP, 1972. Tese
de Doutorado.
[10] KATANO, O. J. Motores de Indução Lineares Aplicados à Tração
Elétrica: Bancada de Ensaios e Análise de Protótipo Acionado por um Inversor de
Freqüência Variável. São Carlos – SP. Escola de Engenharia de São Carlos – USP,
1996. Dissertação de Mestrado.
[11] SANTOS, E. B. – Análise do motor de indução linear baseada na
equivalência com o m motor assimétrico rotativo. Uberlândia – MG. Universidade
Federal de Uberlândia, 2000. Tese de Doutorado.
- 103 -
[12] GIERAS, J. F. Linear Induction Drives, Clarendon Press – Oxford, 1ª
Ed. USA, 1994.
[13] LANGSDORF, A. S. - Teoria de Las Máquinas de Corrente Alterna –
Libros McGraw-Hill, 2ª Ed., 320 p., Cidade do México,1971.
[14] BOLTON, H. - Transverse Edge Effect in Sheet-rotor Induction Motors
- Proceedings IEE, vol. 115, nº 5, p. 725-731, Maio, 1969.
[15] RUSSEL, E. L. NORSWORRTHY, K. H. - Eddy Currents and Wall
Losses in Screened-Rotor Induction Motors - Proceedings IEE, Vol. 105A, p. 163-
175, 1958.
[16] IVANOV-SMOLENSKI, A. V. - Máquinas Eléctricas - Editorial Mir
Moscú, 3 vol., Moscou, 1988.
[17] HIRASA, T. - et. Ali. Equivalent Circuit of UM with End Effect Taken
Into Account. Electrical Engineering in Japan, vol. 100, nº 2, p. 65-71, 1980.
[18] HOANG, Viet Nam. Design of a Single-Sided Linear Induction Motor.
Brisbane - Australia: University of Queensland, Australia, 2003. Bachelor Electrical
Engineering Thesis.
[19] Duarte Oliveira, R. A. Desenho e construção de um motor linear de
indução de baixa velocidade. Monte de Caparica – Portugal. Universidade Nova de
Lisboa, Portugal, 2000. Projeto de Final de Curso.
[20] WEBER, ÉRICO A. Armazenagem Agrícola, Kepler Weber Industrial
S.A., Porto Alegre, 1995, Brasil.
[21] WEBER, ÉRICO A. Excelência em Beneficiamento e Armazenagem de
Grãos, Kepler Weber Industrial S.A., Porto Alegre, 2005, Brasil.
[22] PUZZI, Domingos. Abastecimento e armazenagem de grãos.
Campinas: Instituto Campineiro de Ensino Agrícola, 1973.
[23] Kepler Weber Indústria S/A –- Fabricante de secadores de cereais -
Panambi – RS – http://www.kepler.com.br - Brasil.
[24] Comil - Fabricante de secadores de cereais - Curitiba – PR -
http://www.comil.com.br - Brasil.
[25] Carlos Becker - Fabricante de secadores de cereais - Gravataí – RS -
http://www.carlosbecker.com.br - Brasil.
[26] Industrial Pagé - Fabricante de secadores de cereais - Araranguá – SC
- http://www.indpage.com.br - Brasil.

- 104 -
[27] Joscil - Fabricante de secadores de cereais - Condor – RS -
http://www.joscil.com.br - Brasil.
[28] Aeroter Equipamentos Agro Industriais Ltda - Fabricante de secadores
de cereais - Londrina – PR - http://www.aeroter.com.br - Brasil.
[29] Solução Construtora - Fabricante de secadores de cereais – São
Carlos – SP - http://www.solucaoconstrutora.com.br - Brasil.
[30] Esplanada Equipamentos Ltda - Fabricante de secadores de cereais -
Cascavel – PR - http://www.espl.ind.br - Brasil.
[31] Caliver do Brasil - Fabricante de secadores de cereais - Rolândia – PR
- http://www.caliver.com.br - Brasil.
[32] CASP S/A Indústria e Comércio - Fabricante de secadores de cereais -
Amparo – SP - http://www.casp.com.br - Brasil.
[33] Entringer Máquinas - Fabricante de secadores de cereais - Assis – SP
- http://www.entringer.com.br - Brasil.
[34] Consilos Indústria de silos e secadores Ltda - Fabricante de secadores
de cereais - Cascavel – PR - http://www.consilos.com.br - Brasil.
[35] Thor Máquinas e Montagens Ltda - Fabricante de secadores de
cereais – Coronel Vivida – PR - http://www.thor.com.br - Brasil.
[36] Grain Handler USA – Dryers grain – Minnesota – USA -
http://www.grainhandler.com - USA.
[37] Literatura e artigos ligados à área de máquinas agrícolas e
armazenagem.
[38] NASA National Aeronautics and Space Administration – USA -
http://www. msfc.nasa.gov/news/news/photos/1999/photos99-260.htm.
[39] Maglev Monorails of the World - Shanghai, China -
http://www.monorails.org/tMspages/MagShang.html
[40] TANIMOTO, S. C., BISPO, D., MARTINS NETO, L. Aumento da
confiabilidade em secagem de cereais com uso de motores de indução lineares.
Trabalho técnico apresentado no XXI Congresso Brasileiro de Manutenção, 2006,
Aracaju - SE.
.
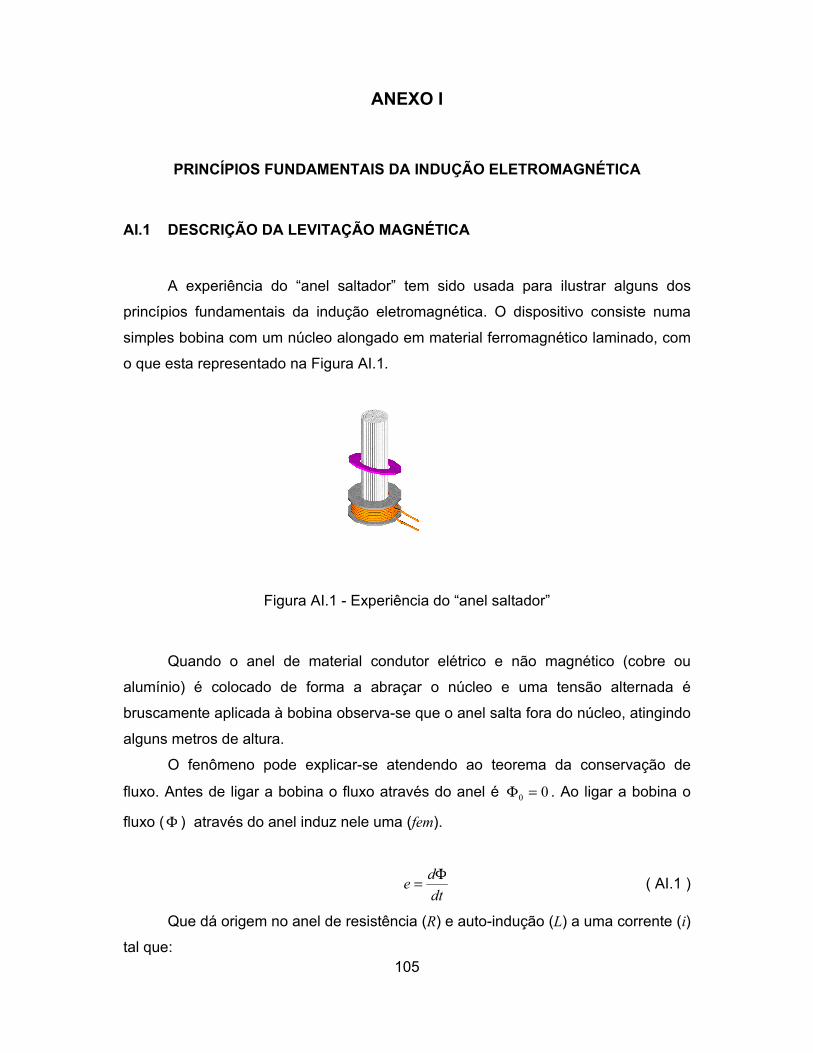
105
ANEXO I
PRINCÍPIOS FUNDAMENTAIS DA INDUÇÃO ELETROMAGNÉTICA
AI.1 DESCRIÇÃO DA LEVITAÇÃO MAGNÉTICA
A experiência do “anel saltador” tem sido usada para ilustrar alguns dos
princípios fundamentais da indução eletromagnética. O dispositivo consiste numa
simples bobina com um núcleo alongado em material ferromagnético laminado, com
o que esta representado na Figura AI.1.
Figura AI.1 - Experiência do “anel saltador”
Quando o anel de material condutor elétrico e não magnético (cobre ou
alumínio) é colocado de forma a abraçar o núcleo e uma tensão alternada é
bruscamente aplicada à bobina observa-se que o anel salta fora do núcleo, atingindo
alguns metros de altura.
O fenômeno pode explicar-se atendendo ao teorema da conservação de
fluxo. Antes de ligar a bobina o fluxo através do anel é 00 =Φ . Ao ligar a bobina o
fluxo (Φ ) através do anel induz nele uma (fem).
dt
de
Φ= ( AI.1 )
Que dá origem no anel de resistência (R) e auto-indução (L) a uma corrente (i)
tal que:

106
dt
diLRi
dt
d+=
Φ (AI2.2 )
Admitindo que 0R = e 0L = vem 0=Φ
dt
d e, portanto Constante =Φ
O fluxo inicial é elevado devido ao regime transitório, e como o anel “exige”
constantemente um fluxo nulo, o anel reage afastando-se violentamente da fonte
que gera o fluxo de forma a ser atravessado por um fluxo nulo. Porém, ao atingir-se
o regime forçado na bobina, se o anel voltar a ser colocado no núcleo ele fica a
levitar. Isto porque efetivamente o anel tem uma certa resistência e auto-indução (ou
constante de tempo L/R) induzindo-se então nele uma certa corrente necessária
para cobrir as suas perdas de Joule e criar um fluxo contrário ao fluxo produzido
pela bobina primária. A força de repulsão entre os dois fluxos é tal que equilibra o
peso do anel e conclui-se que as correntes na bobina e no anel estão em oposição.
O anel não fica, porém centrado com o eixo do dispositivo, isto é, não é
possível sustentá-lo sem o contacto físico com o núcleo, apresentando, portanto
instabilidade. O mesmo sucede com a repulsão entre dois magnetos permanentes. A
razão desta instabilidade pode compreender-se facilmente a partir do dispositivo
indicado em (a) da Figura AI.2, que é em tudo idêntico ao do anel saltador,
simplesmente o núcleo central foi reduzido.
Figura AI.2 - Nova configuração do “anel saltador”
O anel pode ainda ser substituído por um disco condutor e colocado sobre a
superfície do ferro continuando a existir força de sustentação como indica em (b) da
figura anterior.
Porém, nesta configuração é relativamente fácil demonstrar que o sistema é
instável.
ANEL DISCO
(a) (b)

107
A figura seguinte mostra que se o disco não estiver perfeitamente centrado
com eixo magnético da bobina, as forças exercidas radialmente não são simétricas e
o disco será projetado lateralmente. O sistema é, portanto instável.
Figura AI.3 - Demonstração da instabilidade do disco
A estabilidade do disco pode, no entanto ser conseguida á custa de outra
bobina colocada concentricamente com a primeira e atravessada por uma corrente
(I2) defasada da corrente (I1) de modo a criarem campos transladantes que se
propagam radialmente. A Figura AI.4 representa o sistema na qual a estrutura de
ferro é laminada radialmente e é construída com lâminas semelhantes às usadas em
pequenos transformadores.
1
11
αjeII =
2
22
αjeII =
21 αα ≠
Figura AI.4 - Levitador com estabilidade
ENROLAMENTO
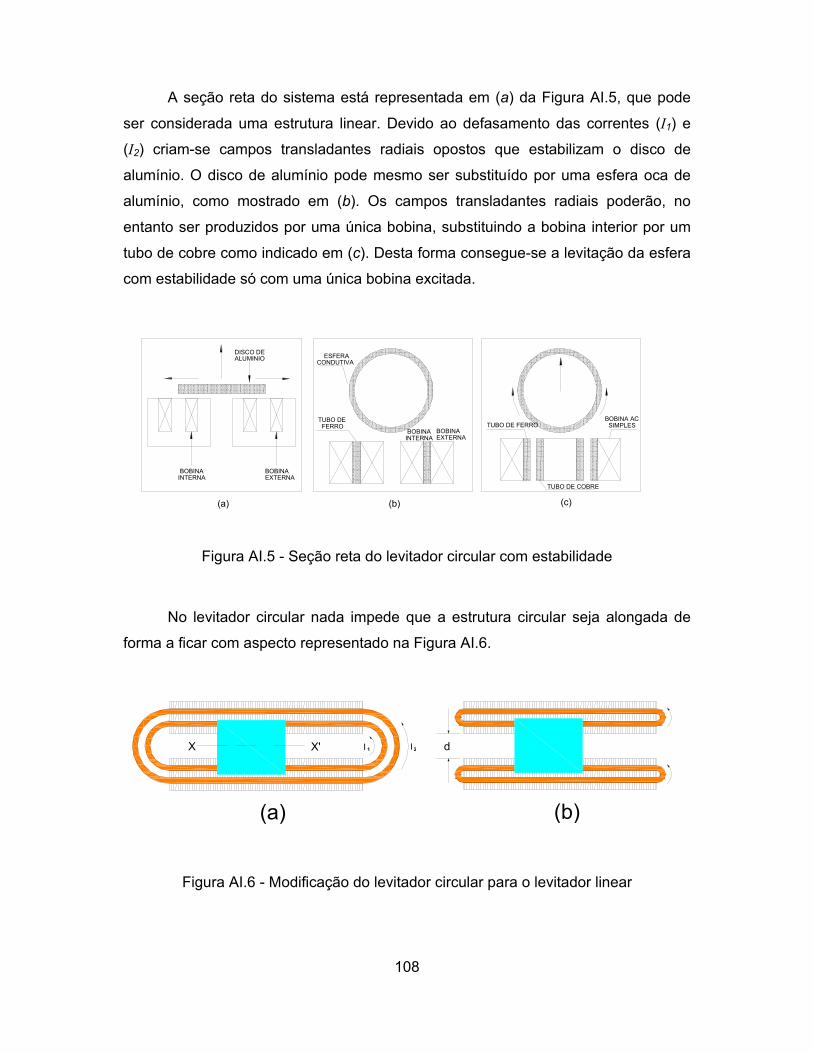
108
A seção reta do sistema está representada em (a) da Figura AI.5, que pode
ser considerada uma estrutura linear. Devido ao defasamento das correntes (I1) e
(I2) criam-se campos transladantes radiais opostos que estabilizam o disco de
alumínio. O disco de alumínio pode mesmo ser substituído por uma esfera oca de
alumínio, como mostrado em (b). Os campos transladantes radiais poderão, no
entanto ser produzidos por uma única bobina, substituindo a bobina interior por um
tubo de cobre como indicado em (c). Desta forma consegue-se a levitação da esfera
com estabilidade só com uma única bobina excitada.
Figura AI.5 - Seção reta do levitador circular com estabilidade
No levitador circular nada impede que a estrutura circular seja alongada de
forma a ficar com aspecto representado na Figura AI.6.
Figura AI.6 - Modificação do levitador circular para o levitador linear
ESFERA CONDUTIVA
DISCO DE ALUMINIO
(a) (b) (c)
BOBINA EXTERNA BOBINA
INTERNA
TUBO DE FERRO
BOBINA INTERNA BOBINA
EXTERNA TUBO DE FERRO
TUBO DE COBRE
BOBINA AC SIMPLES
X' X d I 1 I 2
(a) (b)
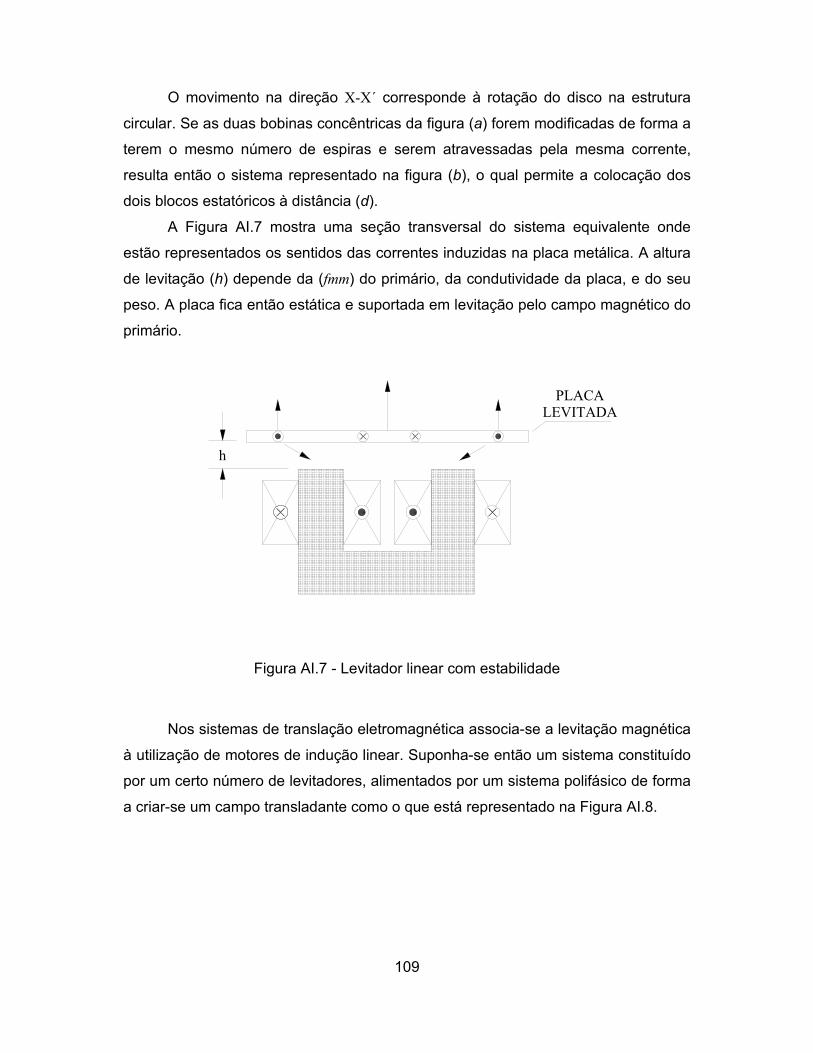
109
O movimento na direção X-X´ corresponde à rotação do disco na estrutura
circular. Se as duas bobinas concêntricas da figura (a) forem modificadas de forma a
terem o mesmo número de espiras e serem atravessadas pela mesma corrente,
resulta então o sistema representado na figura (b), o qual permite a colocação dos
dois blocos estatóricos à distância (d).
A Figura AI.7 mostra uma seção transversal do sistema equivalente onde
estão representados os sentidos das correntes induzidas na placa metálica. A altura
de levitação (h) depende da (fmm) do primário, da condutividade da placa, e do seu
peso. A placa fica então estática e suportada em levitação pelo campo magnético do
primário.
PLACA LEVITADA
h
Figura AI.7 - Levitador linear com estabilidade
Nos sistemas de translação eletromagnética associa-se a levitação magnética
à utilização de motores de indução linear. Suponha-se então um sistema constituído
por um certo número de levitadores, alimentados por um sistema polifásico de forma
a criar-se um campo transladante como o que está representado na Figura AI.8.
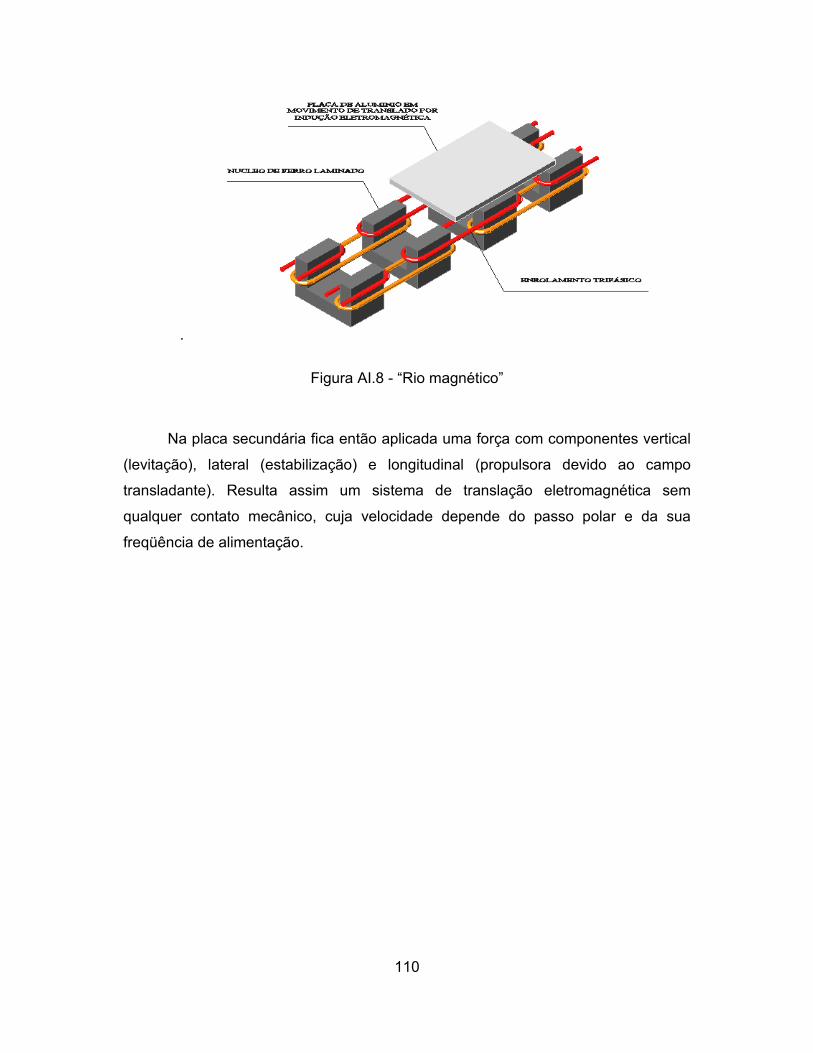
110
.
Figura AI.8 - “Rio magnético”
Na placa secundária fica então aplicada uma força com componentes vertical
(levitação), lateral (estabilização) e longitudinal (propulsora devido ao campo
transladante). Resulta assim um sistema de translação eletromagnética sem
qualquer contato mecânico, cuja velocidade depende do passo polar e da sua
freqüência de alimentação.
111
ANEXO II
PERDAS NOS MOTORES DE INDUÇÃO LINEARES
AII.1 PERDAS POR EFEITO JOULE
A corrente elétrica é um movimento de cargas elétricas. Este movimento
através da estrutura atômica em um material condutor origina choques que
produzem elevação da temperatura do condutor.
Considerando um condutor elétrico de comprimento (l), secção (S) e
resistividade (ρ ), sua resistência elétrica é dada por:
S
l.R ρ= (AII.1)
Por definição, as perdas de Joule são dadas pelo produto da resistência do
condutor pelo quadrado da corrente, isto é:
2
JOULE I.RP = (AII.2)
Onde I é acorrente elétrica que atravessa o condutor. Por outro lado, define-
se como densidade de corrente elétrica (J ), o quociente entre a corrente elétrica (I )
e a secção (S) do condutor, ou seja:
S
IJ = (AII.3)
Então, as perdas Joule podem ser expressas em função da densidade de corrente elétrica:
2
JOULE )S.J.(S
I.P ρ= (AII.4)
Portanto:
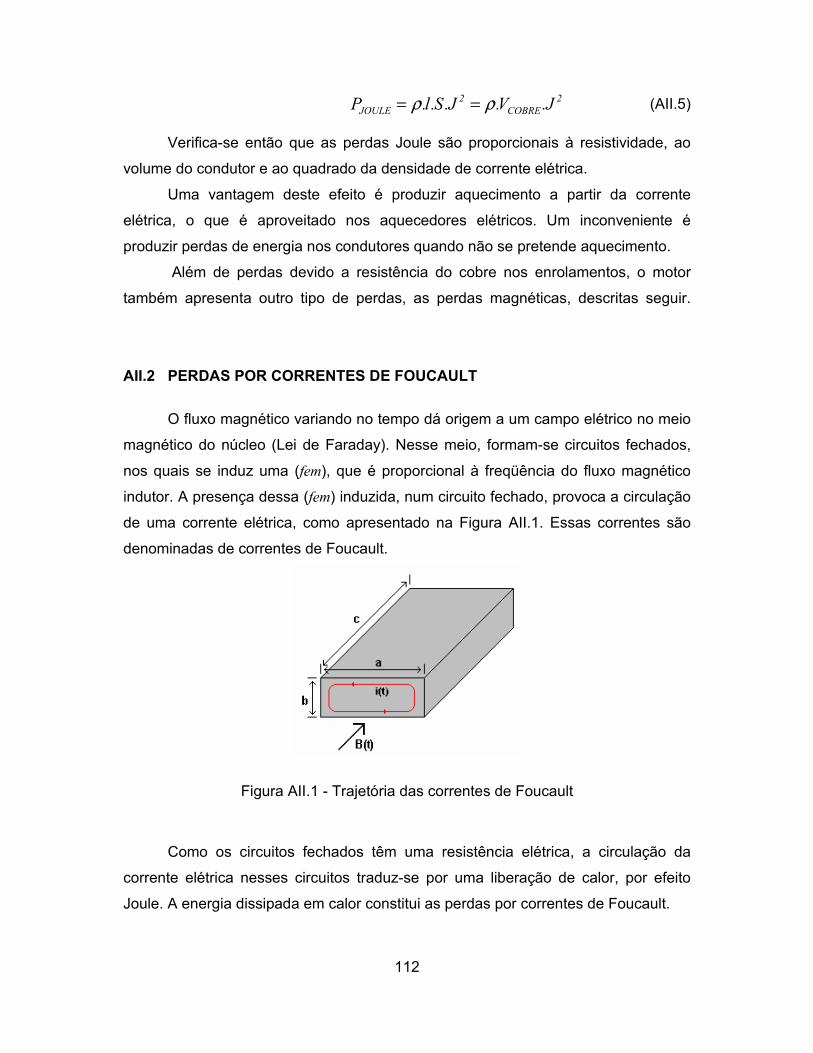
112
2
COBRE
2
JOULE J.V.J.S.l.P ρρ == (AII.5)
Verifica-se então que as perdas Joule são proporcionais à resistividade, ao
volume do condutor e ao quadrado da densidade de corrente elétrica.
Uma vantagem deste efeito é produzir aquecimento a partir da corrente
elétrica, o que é aproveitado nos aquecedores elétricos. Um inconveniente é
produzir perdas de energia nos condutores quando não se pretende aquecimento.
Além de perdas devido a resistência do cobre nos enrolamentos, o motor
também apresenta outro tipo de perdas, as perdas magnéticas, descritas seguir.
AII.2 PERDAS POR CORRENTES DE FOUCAULT
O fluxo magnético variando no tempo dá origem a um campo elétrico no meio
magnético do núcleo (Lei de Faraday). Nesse meio, formam-se circuitos fechados,
nos quais se induz uma (fem), que é proporcional à freqüência do fluxo magnético
indutor. A presença dessa (fem) induzida, num circuito fechado, provoca a circulação
de uma corrente elétrica, como apresentado na Figura AII.1. Essas correntes são
denominadas de correntes de Foucault.
Figura AII.1 - Trajetória das correntes de Foucault
Como os circuitos fechados têm uma resistência elétrica, a circulação da
corrente elétrica nesses circuitos traduz-se por uma liberação de calor, por efeito
Joule. A energia dissipada em calor constitui as perdas por correntes de Foucault.

113
Uma forma de diminuir essas perdas de energia consiste na diminuição do
valor da corrente elétrica através da diminuição do comprimento dos circuitos
fechados onde é induzida a força eletromotriz, com a divisão da área transversa em
pequenas áreas, utilizando material laminado, como apresentado na Figura AII.1. O
valor da corrente elétrica é diminuído, através do aumento do valor da resistência do
circuito fechado, por um aumento da resistividade do material (ρ), o que se consegue
com a adição de silício ao ferro em fusão.
Figura AII.2 - Bloco de material ferromagnético laminado
Como conseqüência do efeito magnético das correntes de Foucault, surge o
Efeito Pelicular, que provoca a alteração da distribuição da indução magnética,
perto do centro da lâmina de material ferromagnético, por ação do campo magnético
de reação criado por aquelas correntes parasitas. Este efeito é pronunciado quando
o campo magnético indutor tem uma freqüência elevada, acima de 950Hz, (19º
harmônico).
Quando se reduzem as perdas por correntes de Foucault, por utilização de
um núcleo formado por pacotes de lâminas de material ferromagnético, surge um
outro problema que tem influência no valor da corrente elétrica de magnetização.
Devido à forma como é realizado o empacotamento, essencialmente, devido à
impossibilidade de se obter um ajuste perfeito entre a chapa das colunas e
travessas, surgem pequenos entreferros nos percursos do fluxo magnético. São
zonas de permeabilidade magnética constante, mas muito baixas,

114
( H/M 10.4 7
0
−= πµ ), necessitando assim uma maior corrente elétrica de
magnetização, para que nestes locais o fluxo magnético permaneça com o mesmo
valor constante do interior do material ferromagnético. Existem ainda, outros
fenômenos com efeitos cumulativos, como o desenvolvimento de correntes de
Foucault entre lâminas, que ocorrem devido à forma de execução do
empacotamento do núcleo.
Considera-se um bloco de material ferromagnético de resistividade (ρ), de
secção transversal (a.b) constante ao longo do seu comprimento (c), e sendo
atravessado por um campo magnético variável B(t), [Figura AII.2]. As perdas por
corrente de Foucault resultam na seguinte expressão:
222
max
222
max ...3
...3
..bfB
VolbfB
cbaPF
ρρ== (AII.6)
A expressão (AII.6), mostra que as correntes induzidas de Foucault provocam
perdas proporcionais ao volume do bloco e ao quadrado da densidade máxima de
fluxo, da freqüência e espessura (b) do bloco e inversamente proporcional á sua
resistividade.
Fazendo um bloco com chapas de espessura b/N, as perdas por correntes de
Foucault passam a ser:
F2
222
max2
3
22
maxF P.N
1b.f.B
.3
c.b.a.
N
1
N
b.f.B
.3
c.a.NP ==
=
ρρ (AII.7)
Ou seja, as perdas por correntes de Foucault reduzem-se de ( 2/1 N ), com a
utilização de ferro laminado.
Uma aplicação doméstica destas correntes é nos fogões de cozinha por
indução, em que é possível cozinhar alimentos sem aquecimento direto do
recipiente, como acontece nos fogões tradicionais. Desta forma, não é o fogão que
aquece diretamente o recipiente, mas sim o contrário.
O mesmo princípio é utilizado na indústria nos fornos de indução, na fusão de
metais. Este princípio também é utilizado nos aquecedores indutivos para montagem
e extração de rolamentos à quente em eixos, evitando assim deformações e danos
mecânicos nos mesmos, por choques mecânicos.
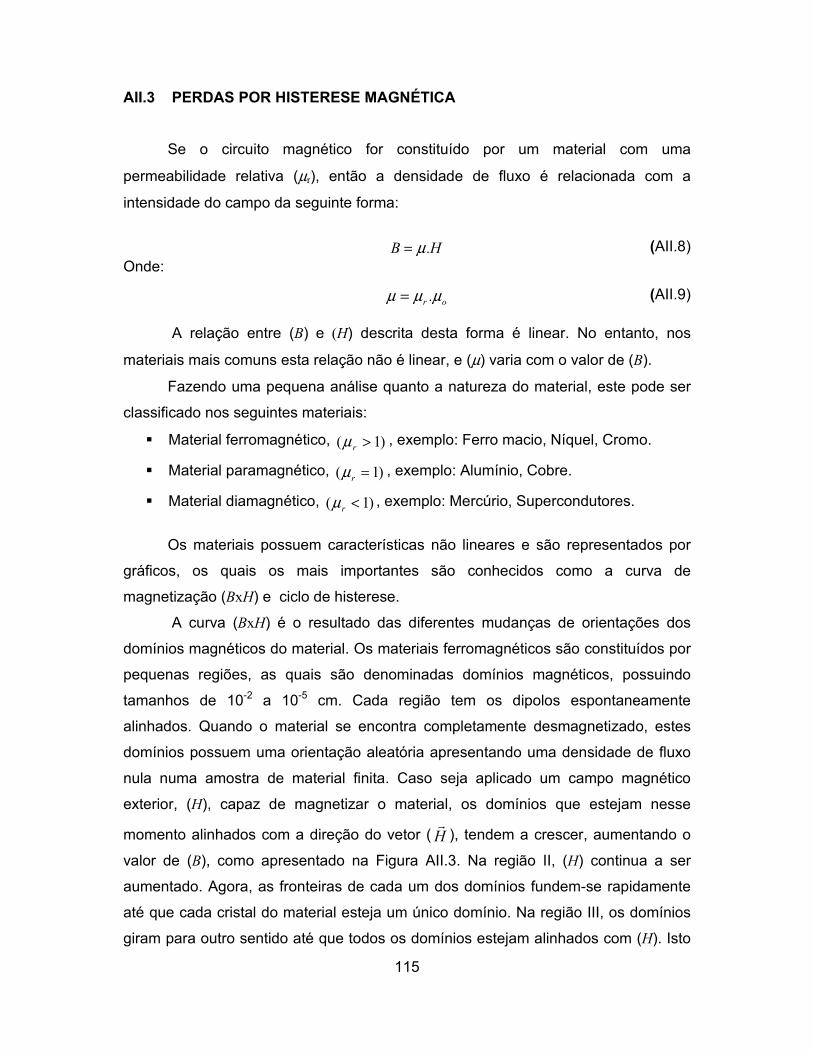
115
AII.3 PERDAS POR HISTERESE MAGNÉTICA
Se o circuito magnético for constituído por um material com uma
permeabilidade relativa (µr), então a densidade de fluxo é relacionada com a
intensidade do campo da seguinte forma:
H.B µ= (AII.8)
Onde:
or .µµµ = (AII.9)
A relação entre (B) e (H) descrita desta forma é linear. No entanto, nos
materiais mais comuns esta relação não é linear, e (µ) varia com o valor de (B).
Fazendo uma pequena análise quanto a natureza do material, este pode ser
classificado nos seguintes materiais:
Material ferromagnético, )1( >rµ , exemplo: Ferro macio, Níquel, Cromo.
Material paramagnético, )1( =rµ , exemplo: Alumínio, Cobre.
Material diamagnético, )1( <rµ , exemplo: Mercúrio, Supercondutores.
Os materiais possuem características não lineares e são representados por
gráficos, os quais os mais importantes são conhecidos como a curva de
magnetização (BxH) e ciclo de histerese.
A curva (BxH) é o resultado das diferentes mudanças de orientações dos
domínios magnéticos do material. Os materiais ferromagnéticos são constituídos por
pequenas regiões, as quais são denominadas domínios magnéticos, possuindo
tamanhos de 10-2 a 10-5 cm. Cada região tem os dipolos espontaneamente
alinhados. Quando o material se encontra completamente desmagnetizado, estes
domínios possuem uma orientação aleatória apresentando uma densidade de fluxo
nula numa amostra de material finita. Caso seja aplicado um campo magnético
exterior, (H), capaz de magnetizar o material, os domínios que estejam nesse
momento alinhados com a direção do vetor (Hr), tendem a crescer, aumentando o
valor de (B), como apresentado na Figura AII.3. Na região II, (H) continua a ser
aumentado. Agora, as fronteiras de cada um dos domínios fundem-se rapidamente
até que cada cristal do material esteja um único domínio. Na região III, os domínios
giram para outro sentido até que todos os domínios estejam alinhados com (H). Isto
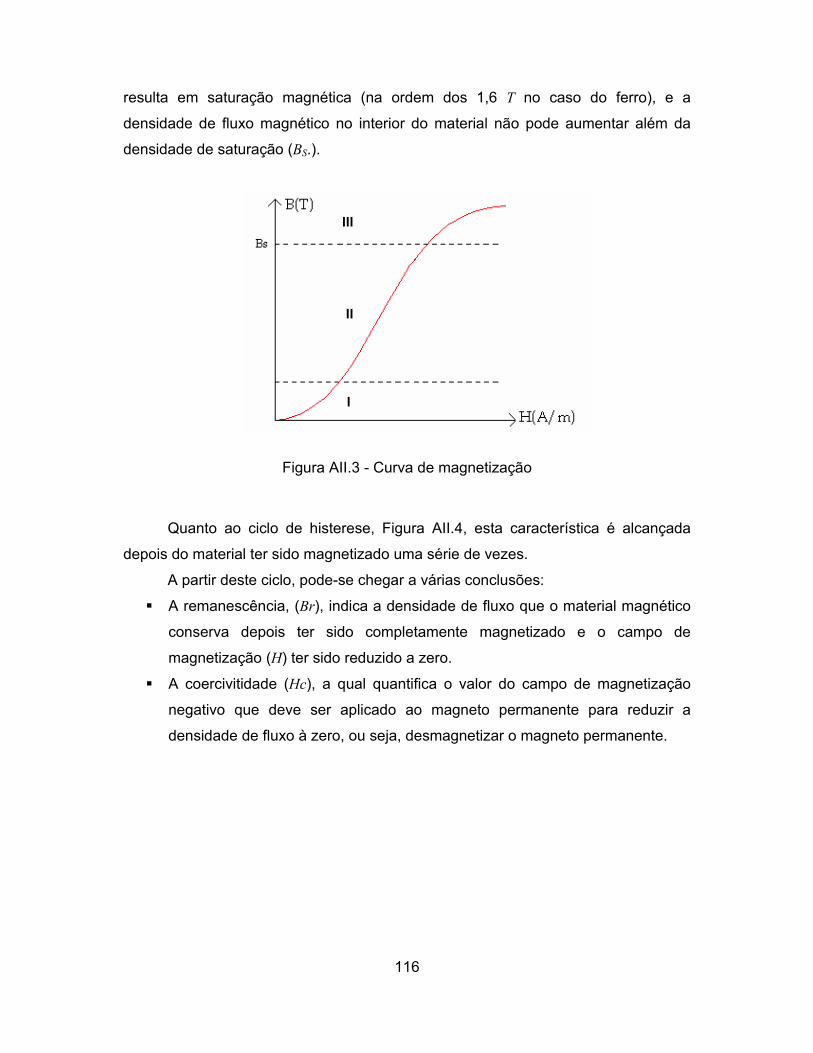
116
resulta em saturação magnética (na ordem dos 1,6 T no caso do ferro), e a
densidade de fluxo magnético no interior do material não pode aumentar além da
densidade de saturação (BS.).
Figura AII.3 - Curva de magnetização
Quanto ao ciclo de histerese, Figura AII.4, esta característica é alcançada
depois do material ter sido magnetizado uma série de vezes.
A partir deste ciclo, pode-se chegar a várias conclusões:
A remanescência, (Br), indica a densidade de fluxo que o material magnético
conserva depois ter sido completamente magnetizado e o campo de
magnetização (H) ter sido reduzido a zero.
A coercivitidade (Hc), a qual quantifica o valor do campo de magnetização
negativo que deve ser aplicado ao magneto permanente para reduzir a
densidade de fluxo à zero, ou seja, desmagnetizar o magneto permanente.
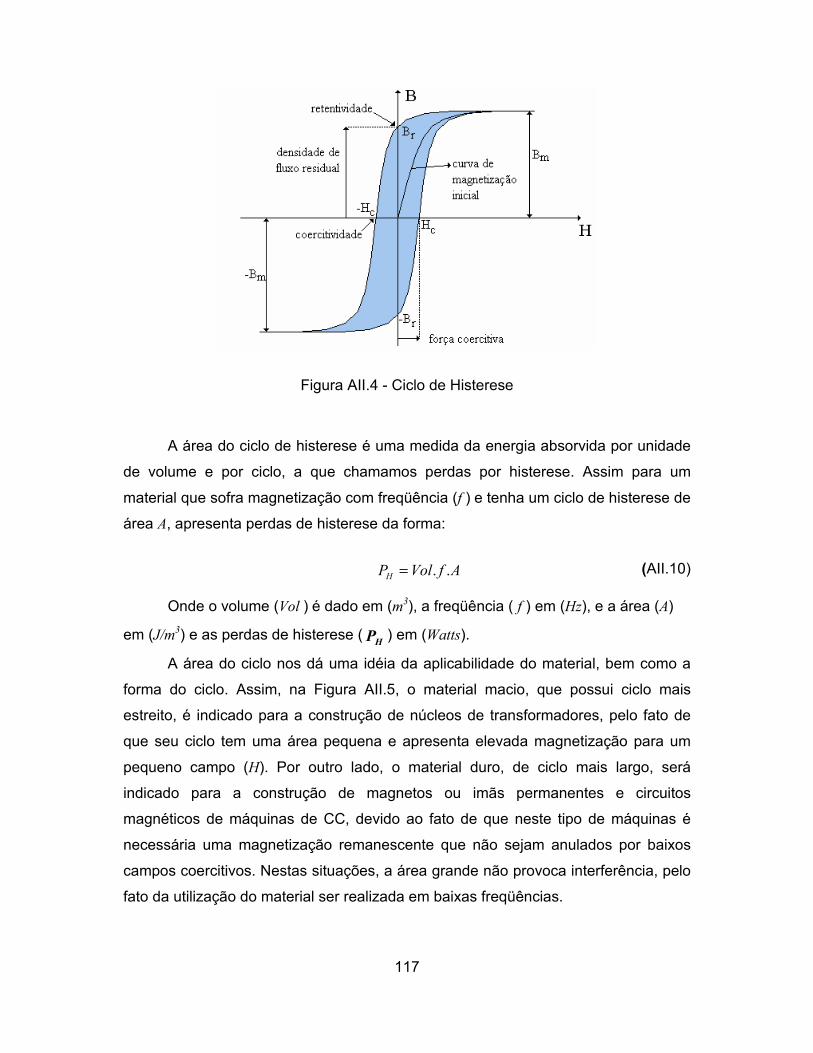
117
Figura AII.4 - Ciclo de Histerese
A área do ciclo de histerese é uma medida da energia absorvida por unidade
de volume e por ciclo, a que chamamos perdas por histerese. Assim para um
material que sofra magnetização com freqüência (f ) e tenha um ciclo de histerese de
área A, apresenta perdas de histerese da forma:
AfVolPH ..= (AII.10)
Onde o volume (Vol ) é dado em (m3), a freqüência ( f ) em (Hz), e a área (A)
em (J/m3) e as perdas de histerese (HP ) em (Watts).
A área do ciclo nos dá uma idéia da aplicabilidade do material, bem como a
forma do ciclo. Assim, na Figura AII.5, o material macio, que possui ciclo mais
estreito, é indicado para a construção de núcleos de transformadores, pelo fato de
que seu ciclo tem uma área pequena e apresenta elevada magnetização para um
pequeno campo (H). Por outro lado, o material duro, de ciclo mais largo, será
indicado para a construção de magnetos ou imãs permanentes e circuitos
magnéticos de máquinas de CC, devido ao fato de que neste tipo de máquinas é
necessária uma magnetização remanescente que não sejam anulados por baixos
campos coercitivos. Nestas situações, a área grande não provoca interferência, pelo
fato da utilização do material ser realizada em baixas freqüências.
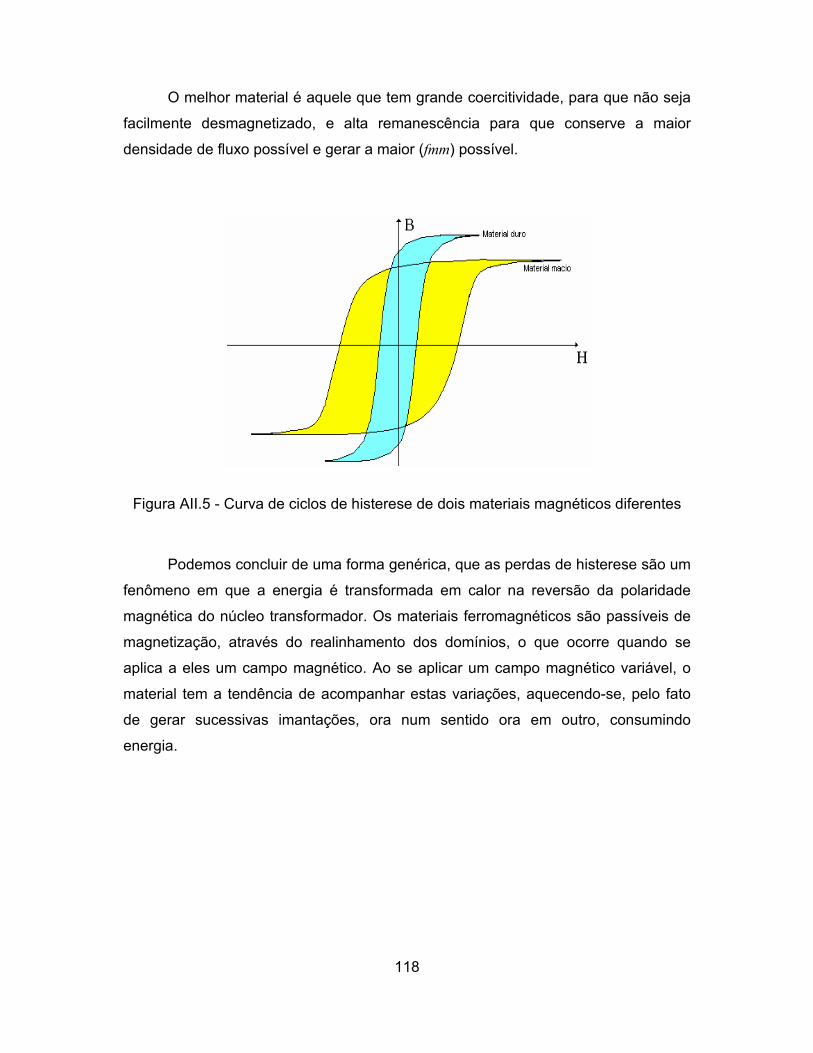
118
O melhor material é aquele que tem grande coercitividade, para que não seja
facilmente desmagnetizado, e alta remanescência para que conserve a maior
densidade de fluxo possível e gerar a maior (fmm) possível.
Figura AII.5 - Curva de ciclos de histerese de dois materiais magnéticos diferentes
Podemos concluir de uma forma genérica, que as perdas de histerese são um
fenômeno em que a energia é transformada em calor na reversão da polaridade
magnética do núcleo transformador. Os materiais ferromagnéticos são passíveis de
magnetização, através do realinhamento dos domínios, o que ocorre quando se
aplica a eles um campo magnético. Ao se aplicar um campo magnético variável, o
material tem a tendência de acompanhar estas variações, aquecendo-se, pelo fato
de gerar sucessivas imantações, ora num sentido ora em outro, consumindo
energia.
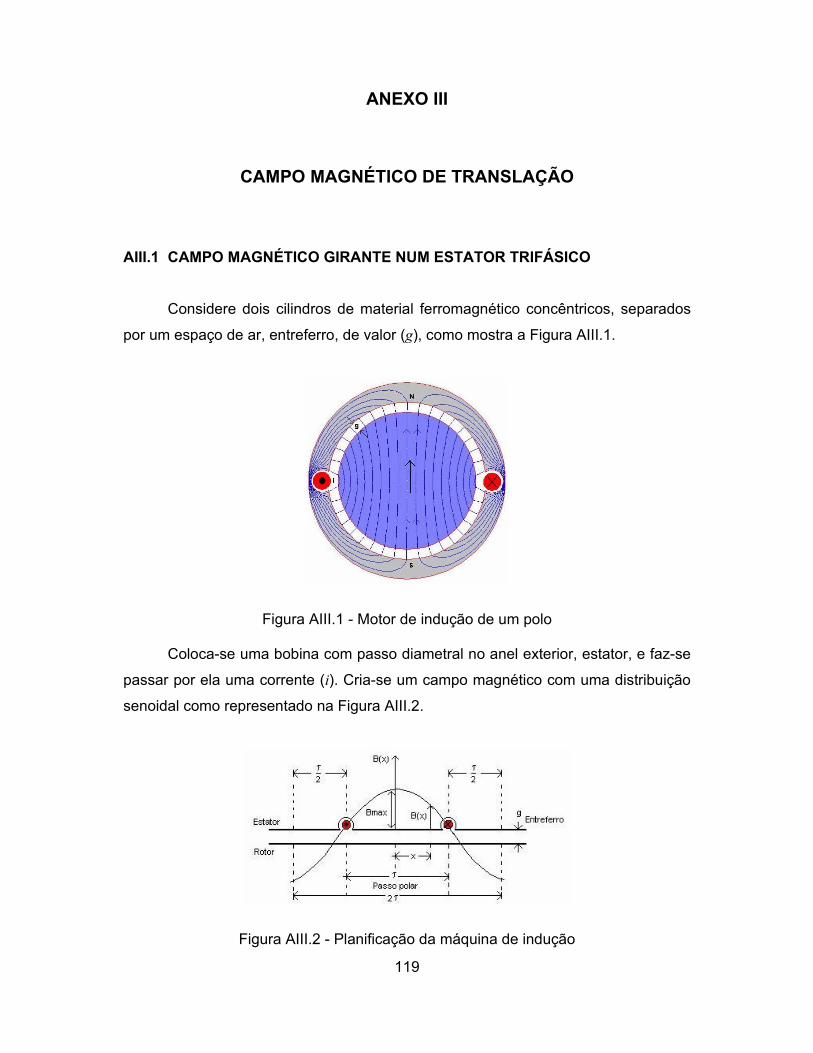
119
ANEXO III
CAMPO MAGNÉTICO DE TRANSLAÇÃO
AIII.1 CAMPO MAGNÉTICO GIRANTE NUM ESTATOR TRIFÁSICO
Considere dois cilindros de material ferromagnético concêntricos, separados
por um espaço de ar, entreferro, de valor (g), como mostra a Figura AIII.1.
Figura AIII.1 - Motor de indução de um polo
Coloca-se uma bobina com passo diametral no anel exterior, estator, e faz-se
passar por ela uma corrente (i). Cria-se um campo magnético com uma distribuição
senoidal como representado na Figura AIII.2.
Figura AIII.2 - Planificação da máquina de indução

120
Se a corrente (I) for constante no tempo, a distribuição é constante no tempo
mas variável no espaço, ao longo do entreferro, da seguinte forma:
xBxB .cos.)( maxτ
π= (AIII.1)
onde (ττττ) é o passo polar (igual ao passo da bobina), (x) é a distância de
deslocamento do campo magnético. Se (i) for corrente alternada senoidal
tsenII m .. ω= com f..2πω = , então a onda é variável no espaço e no tempo e é
escrita da forma:
xtsenBtxB m .cos)..(.),(τ
πω= (AIII.3)
Onde
mm IKB .= é a intensidade máxima do campo de indução magnética.
Se em vez de uma bobina houver três bobinas iguais e defasadas no espaço
de 120º, atravessadas cada uma por um sistema trifásico de correntes, tais que:
)º120.(.
)º120.(.
..
3
2
1
+=
−=
=
tsenII
tsenII
tsenII
m
m
m
ω
ω
ω
(AIII.4)
São criados três campos pulsantes variáveis no espaço e no tempo dados
por:
)º120.cos().º120.(.),(
)º120.cos().º120.(.),(
.cos)..(.),(
3
2
1
++=
−−=
=
xtsenBtxB
xtsenBtxB
xtsenBtxB
m
m
m
τ
πω
τ
πω
τ
πω
(AIII.5)
Atendendo à seguinte relação trigonométrica:
[ ])()(2
1cos. βαβαβα −++= sensensen (AIII.6)
As relações anteriores podem ser escritas na forma:

121
)..(.2
)º240..(.2
),(
)..(.2
)º240..(.2
),(
)..(.2
)..(.2
),(
3
2
1
xtsenB
xtsenB
txB
xtsenB
xtsenB
txB
xtsenB
xtsenB
txB
mm
mm
mm
τ
πω
τ
πω
τ
πω
τ
πω
τ
πω
τ
πω
−+++=
−+−+=
−++=
(AIII.7)
Num determinado ponto do entreferro a onda resultante corresponde à soma
destas três ondas pulsantes, ou seja:
)..(.2
3),(),(),(),( 321 xtsenBtxBtxBtxBtxB m
τ
πω −=++= (AIII.8)
Então a onda resultante é uma onda girante com uma amplitude constante de
valor mB
2
3 e uma velocidade dada por 0.... =−=
− dx
xdtxtd
πω
τ
πω .
Como: mSX B
dt
dxV = , obtém-se: ⇒=== f...f..
.VSX τ
π
τπ
π
τω22 onde temos: :
f..VSX τ2= (AIII.9)
AIII.1.2 CAMPO DE TRANSLAÇÃO NO ESTATOR LINEAR TRIFÁSICO
No MIL trifásico, os enrolamentos do estator também criam um campo
pulsante que evolui ao longo do tempo. Este campo é semelhante ao produzido pelo
estator de um motor convencional. Neste caso, como o movimento do motor é linear
e não circular, o campo é designado de transladante em vez de girante.
As figuras a seguir mostram a evolução do campo transladante de oito polos
durante doze instantes de tempo, correspondendo a um período completo. Mostra
também a disposição e sentidos das correntes do sistema trifásico que dão origem
ao campo transladante no estator trifásico do MIL.

122
Figura AIII.3 - Onda transladante de um MIL trifásico no instante de tempo 1t ,onde:
01 =I , II .2
32 −= e II .
2
33 +=
Figura AIII.4 - Onda transladante de um MIL trifásico no instante de tempo 2t , onde:
II .2
11 −= , II .
2
12 −= e II =3
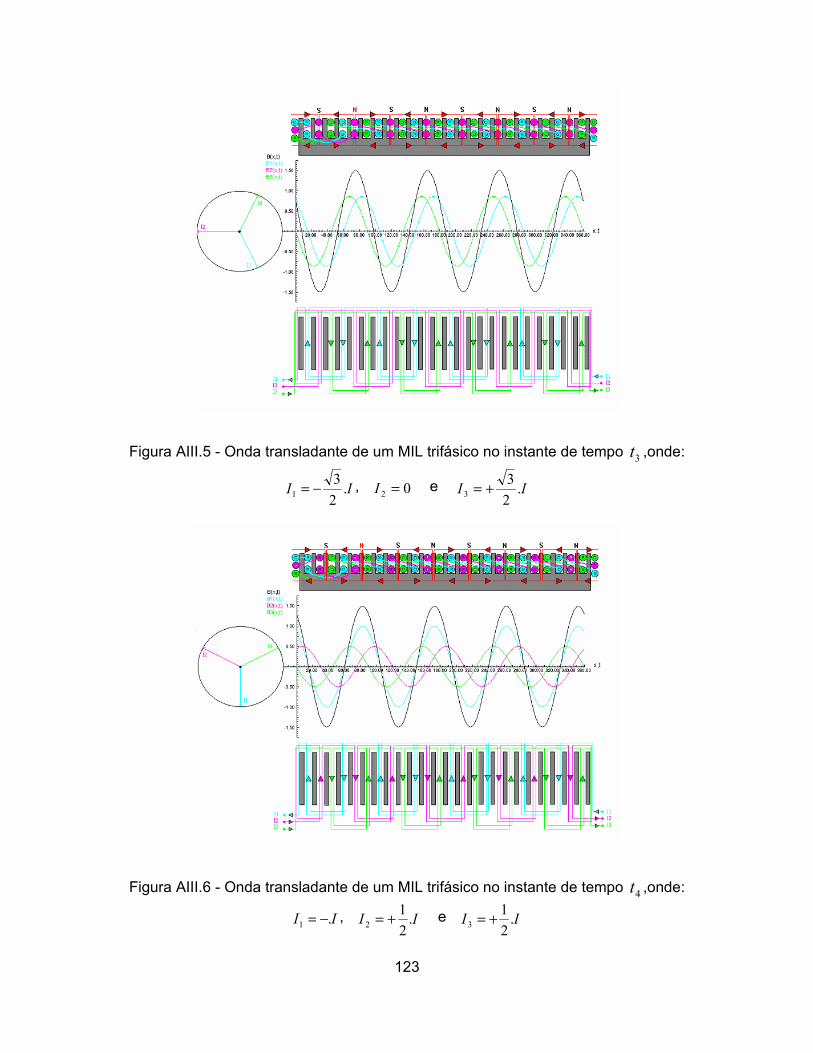
123
Figura AIII.5 - Onda transladante de um MIL trifásico no instante de tempo 3t ,onde:
II .2
31 −= , 02 =I e II .
2
33 +=
Figura AIII.6 - Onda transladante de um MIL trifásico no instante de tempo 4t ,onde:
II .1 −= , II .2
12 += e II .
2
13 +=
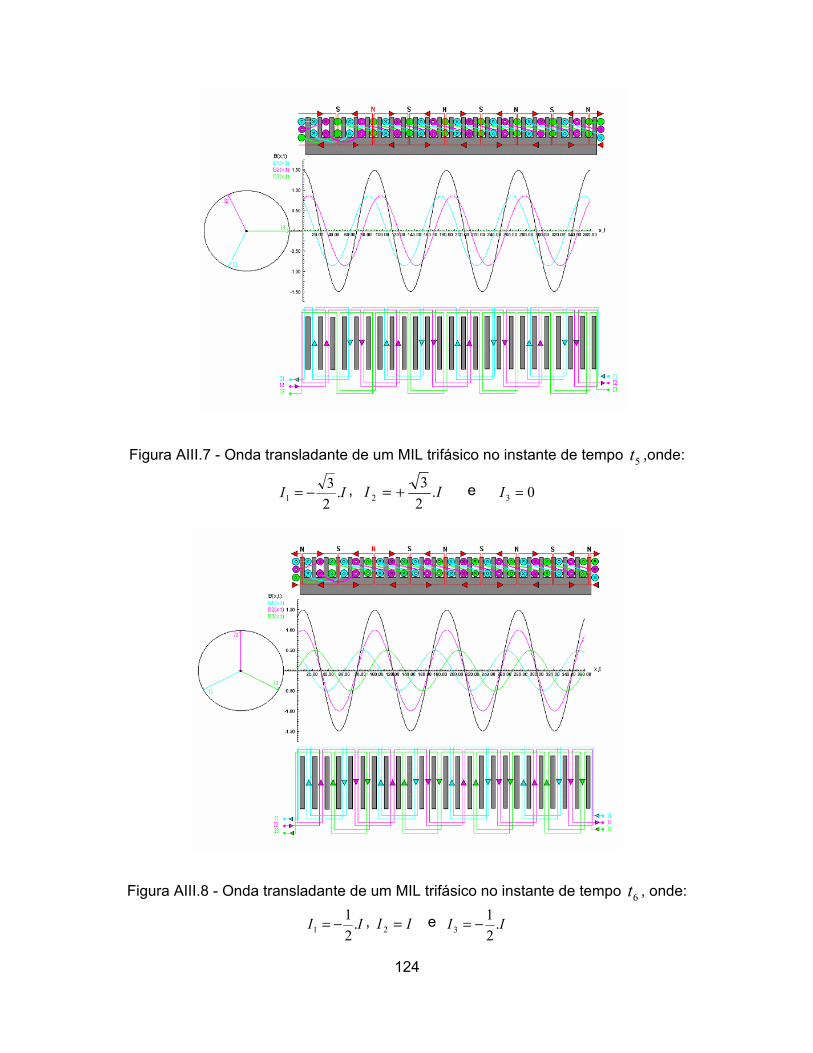
124
Figura AIII.7 - Onda transladante de um MIL trifásico no instante de tempo 5t ,onde:
II .2
31 −= , II .
2
32 += e 03 =I
Figura AIII.8 - Onda transladante de um MIL trifásico no instante de tempo 6t , onde:
II .2
11 −= , II =2
e II .2
13 −=
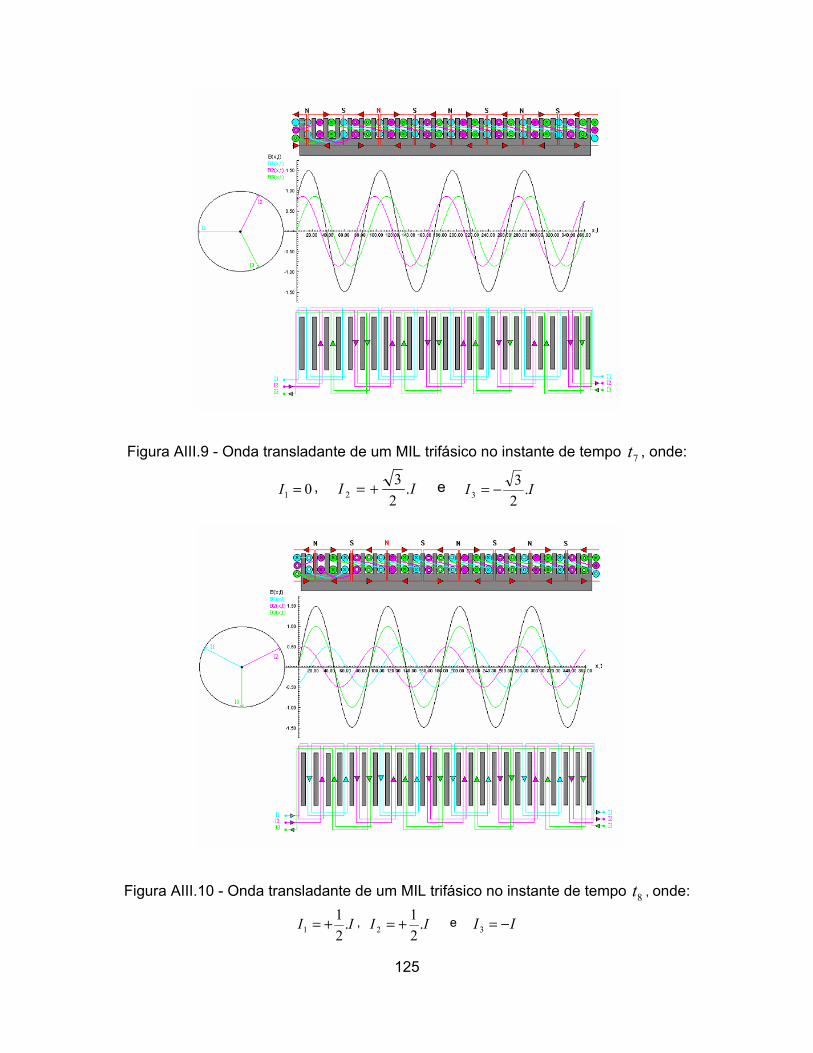
125
Figura AIII.9 - Onda transladante de um MIL trifásico no instante de tempo 7t , onde:
01 =I , II .2
32 += e II .
2
33 −=
Figura AIII.10 - Onda transladante de um MIL trifásico no instante de tempo 8t , onde:
II .2
11 += , II .
2
12 += e II −=3
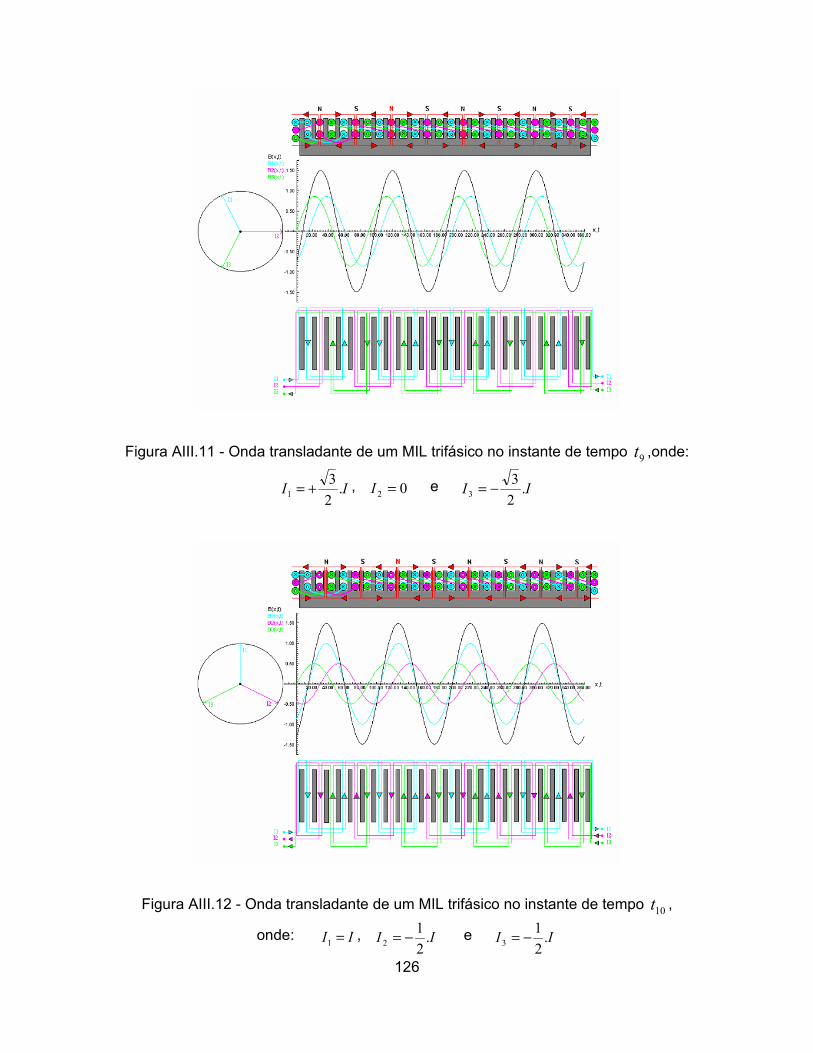
126
Figura AIII.11 - Onda transladante de um MIL trifásico no instante de tempo 9t ,onde:
II .2
31 += , 02 =I e II .
2
33 −=
Figura AIII.12 - Onda transladante de um MIL trifásico no instante de tempo 10t ,
onde: II =1, II .
2
12 −= e II .
2
13 −=
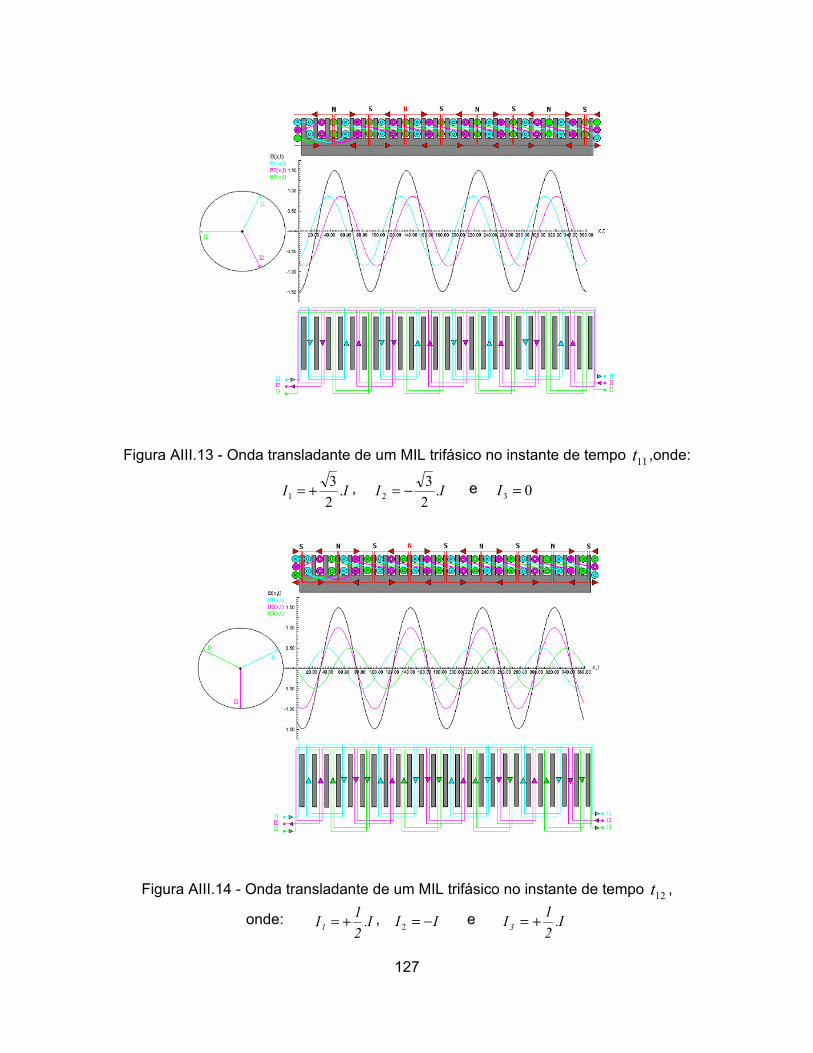
127
Figura AIII.13 - Onda transladante de um MIL trifásico no instante de tempo 11t ,onde:
II .2
31 += , II .
2
32 −= e 03 =I
Figura AIII.14 - Onda transladante de um MIL trifásico no instante de tempo 12t ,
onde: I.2
1I1 += , II −=2
e I.2
1I 3 +=

128
Observando as Figuras AIII.3 a AIII.14, observa-se que o campo transladante
se desloca com uma velocidade (Vsx) da esquerda para a direita, de onde vem a
designação de campo transladante, do estator do MIL. O fasor apresentado dá uma
idéia da corrente máxima que percorre cada um dos três enrolamentos do MIL. As
ondas correspondentes a cada uma das bobinas estão defasadas no espaço,
porque os enrolamentos encontram-se em regiões diferentes. Assumindo que a
contribuição de cada fase no campo magnético tem a forma senoidal, e analisando a
onda resultante da soma das três ondas respectivas aos três enrolamentos,
podemos observar que o resultado é uma onda aproximadamente senoidal, cuja
amplitude é uma vez e meia superior a amplitude máxima da densidade de fluxo de
cada fase.
Como dito anteriormente, o campo transladante desloca-se com uma
velocidade (Vsx) através do estator. Se este campo fosse aplicado numa máquina
rotativa, então a sua velocidade angular seria:
f..2πω = (AIII.10)
Como:
r.Vsx ω= (AIII.11)
Encontrando um raio de um motor rotativo cujo perímetro é igual à distância
( τ.2 ), determina-se a velocidade linear do campo:
⇒=⇒= .2r..2 .2P τπτ de onde temos:
π
τ=r (AIII.12)
assim, substituindo (AIII.12) em (AIII.11), obtemos:
f..Vsx τ2= (AIII.13)
Conclui-se então que a velocidade do campo girante é proporcional ao passo
polar do estator trifásico e à freqüência de alimentação. Esta é a velocidade do

129
campo transladante no estator do MIL, e é denominada de velocidade síncrona. Na
realidade, o linor não se move a esta velocidade, mas a uma velocidade inferior que
é dada por:
)s.(f..Vrx −= 12τ (AIII.14)
Onde (s), é o escorregamento ou deslizamento do linor e é definido por:
sx
rxsx
V
VVs
−= (AIII.15)
Concluindo, podemos dizer que a velocidade do linor pode ser controlada
através da freqüência de alimentação, ou pelo comprimento do passo polar.
O sentido de translação do campo, que determina o sentido de translação do
linor através do estator, depende da seqüência das tensões e das ligações das três
fases, que na prática poderá ser invertido, invertendo as ligações de duas fases
quaisquer do estator com a linha de alimentação.

130
ANEXO IV
FORMAS DE ONDA DE CAMPO CARACTERÍSTICAS DO MIL
AIV.1 CAMPO LONGITUDINAL EM VAZIO NO ENTREFERRO
Neste anexo, referindo-se ao Capítulo III, seção 3.5, pretende-se
e f e t u a r o estudo d a distribuição do campo ao longo do entreferro,
impondo no estator do MIL uma determinada distribuição densidade
de corrente, para analisar o comportamento de campo. Este estudo é
realizado com a máquina em vazio, ou seja, com ausência da chapa
linórica, ou com a sua presença deslocando-se à velocidade síncrona.
Considerando que a chapa rotórica se desloca à velocidade síncrona, tal
como é representado na F igura A IV.1, aplica-se a lei de Ampère ao
contorno ABCDA.
Figura AIV.1 – Vista longitudinal do MIL utilizado.
Considerando que o linor não é atravessado por corrente, a aplicação
da lei de Ampère resulta:
dxjdxx
b.
g1
0
=∂
∂
µ (AIV.1)

131
Como dxx
bdb
∂
∂= , pode-se afirmar que:
dxj.g
db 1
0µ= (AIV.2)
Considerando a densidade de corrente uma função senoidal da forma:
−= xtsen.Jj
τ
πω11 (AIV.3)
Substituindo (AIV.3) em (AIV.2) tem-se:
dxxtsen.J.g
db
−=
τ
πω
µ1
0 (AIV.4)
Integrando (AIV.4) tem-se:
Kxtcos.J.g
b +
−=
τ
πω
µ
π
τ1
0 (AIV.5)
A constante K resultante da integração deve ser calculada, para que fique
definida a densidade de fluxo b, por unidade de largura do estator. A constante k
depende das condições impostas ao circuito magnético. Como o ferro se limita
unicamente à zona ativa de corrente, o fluxo ao longo de todo o comprimento do
entreferro lT é nulo, ou seja:
00
=∫fl
bdx (AIV.6)
Como o comprimento do MIL, lT é dado por τplT 2= , o campo b por
unidade de largura do estator é dado por:
−
−=
τ
πω
τ
π
π
τ
µ
22
212
0 TT
T
l.tcos
l.senJ.
l.g
K (AIV.7)
Substituindo (AIV.5) em (AIV.6) obtém-se a constante K que é dada por:
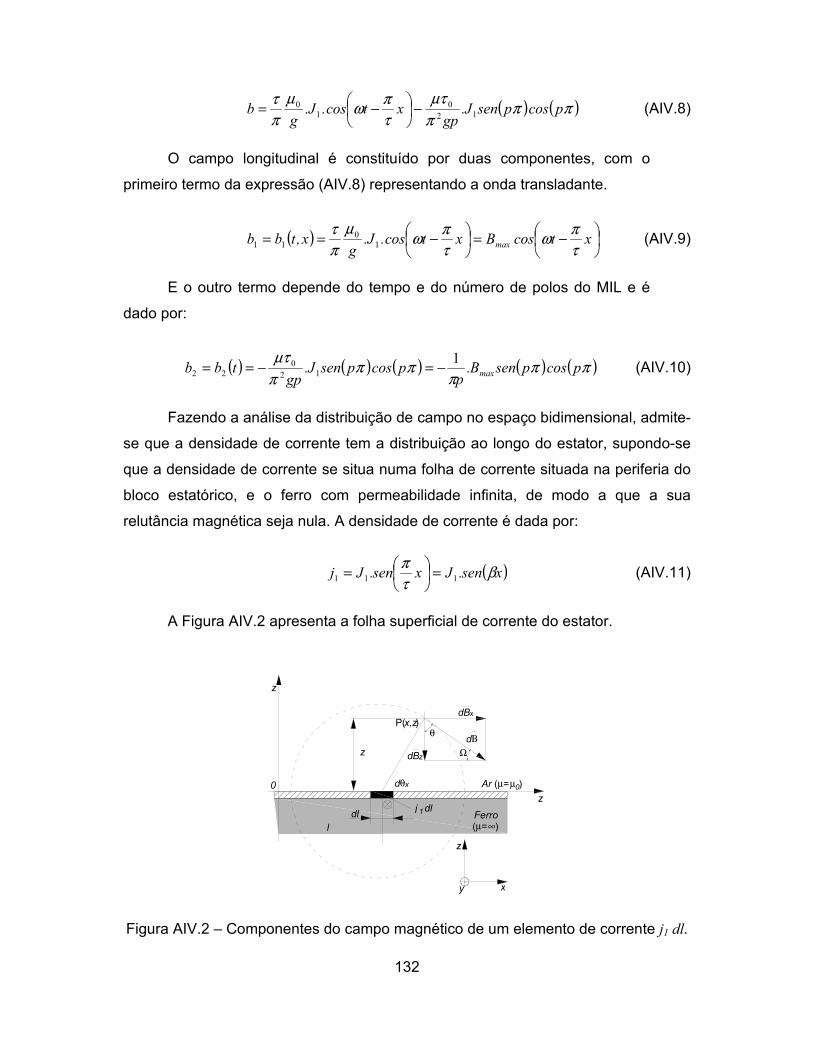
132
( ) ( )πππ
µτ
τ
πω
µ
π
τpcospsenJ.
gpxtcos.J.
gb 12
0
1
0 −
−= (AIV.8)
O campo longitudinal é constituído por duas componentes, com o
primeiro termo da expressão (AIV.8) representando a onda transladante.
( )
−=
−== xtcosBxtcos.J.
gx,tbb max
τ
πω
τ
πω
µ
π
τ1
0
11 (AIV.9)
E o outro termo depende do tempo e do número de polos do MIL e é
dado por:
( ) ( ) ( ) ( ) ( )πππ
πππ
µτpcospsenB.
ppcospsenJ.
gptbb max
112
0
22 −=−== (AIV.10)
Fazendo a análise da distribuição de campo no espaço bidimensional, admite-
se que a densidade de corrente tem a distribuição ao longo do estator, supondo-se
que a densidade de corrente se situa numa folha de corrente situada na periferia do
bloco estatórico, e o ferro com permeabilidade infinita, de modo a que a sua
relutância magnética seja nula. A densidade de corrente é dada por:
( )xsen.Jxsen.Jj βτ
π111 =
= (AIV.11)
A Figura AIV.2 apresenta a folha superficial de corrente do estator.
Figura AIV.2 – Componentes do campo magnético de um elemento de corrente j1 dl.
d B z
d
Β
z
θ Ω
P( x,z
)
Ar
( µ =
µ 0 )
d
θ x
z
0
dl
j 1
dl
Ferro
( µ =
∞ )
l
z
x
z
y
d B x

133
Aplicando a lei de Ampère às componentes em z e em x do campo magnético
obtém-se:
( )
( )[ ]dlzlx
lsen.zJdBx 22
10
+−=
π
βµ (AIV.12)
( ) ( )
( )[ ] dlzlx
lsen.lxJdBz 22
10
+−
−=
π
βµ (AIV.13)
Assumindo que a folha de corrente do estator tem um comprimento infinito,
integrando as componentes dos campos têm-se:
( )
( )[ ] ( ) ZexsenJdl.zlx
lsenzJB 1022
10
x
ββµβ
π
µ −∞
∞−
=+−
= ∫ (AIV.14)
( ) ( )( )[ ] ( ) ZexcosJdl.
zlx
lsenlxzJB 1022
10
z
ββµβ
π
µ −∞
∞−
=+−
−= ∫ (AIV.15)
Figura AIV.3 - Linhas de força de campo
Para um ponto genérico P(x,z) duma linha de força do campo, tem-se:
ϑθ gcottgdx
dz
P
==
(AIV.16)
Combinando as expressões (AIV.14) e (AIV.16) resulta:

134
( )xgcotdx
dzβ= (AIV.17)
A integração da expressão (AIV.17) resulta na equação que representa
cada uma das linha de força do campo e é dada por:
( ) ( ) Cxsenln1
dxxgcotz +== ∫ ββ
β (AIV.18)
Onde a constante C toma valores diferentes para cada linha de força. O
próximo objetivo é determinar uma função que represente analiticamente qualquer
linha de força, sendo indicada sobre essa linha a percentagem de fluxo que ela limita
na globalidade do fluxo que sai do estator.
Seja Φ o fluxo total através de um plano vertical situado no eixo x = τ/2.
Sendo as linhas de força do campo, normais ao referido plano, o campo B apresenta
componente apenas segundo x.
Ze2.senJB 10z
βτ
τ
πµ −
= (AIV.19)
Assumindo que o plano em estudo se situa entre z = 0 e z = ∞, temos:
0
0
0
0
x B1
dzeBdz.B Z
βΦ β === ∫∫
∞−
∞
(AIV.20)
Considerando agora o fluxo entre os pontos de ordenadas 0 e z, tem-se:
( )Ze1B1
dz.B 0
z
0
xz
β
βΦ −−== ∫ (AIV.21)
mas, este fluxo é só uma percentagem ε% do fluxo total, e assim:
Φε
Φ100
z = (AIV.22)
Onde:
100
1e Zεβ −=− (AIV.23)

135
O valor z corresponde à abcissa x = τ/2, ou seja, aplicando a função logaritmo
na expressão (AIV.23), temos:
−=100
1ln1
zε
β (AIV.24)
Substituindo na expressão (AIV.18) o valor de x por x = τ/2, tem-se:
−=100
1ln1
Cε
β (AIV.25)
Com as operações matemáticas na expressão (AIV.24) obtem-se:
−
=
1001
xsen
lnzε
τ
π
π
τ (AIV.26)
Da expressão (AIV.26) pode-se obter as seguintes conclusões:
1. As linhas de força do campo são simétricas ao eixo de abcissa x= t/2, e
tendem assimtoticamente para os eixos x=0 e x= τ.
2. O passo polar τ não influência a configuração das linhas de força. Na
realidade, o passo polar é um fator de escala.
3. O valor máximo de z é atingido no ponto de abcissa, x = τ/2, ou seja:
−=100
1lnzε
π
τ (AIV.27)
É apresentada a seguir a análise das seguintes condições:
i. Para: τ=maxz
−=100
1lnε
π
ττ %7,95=ε
Conclui-se que somente cerca e 4,3% do fluxo total atinge uma altura
superior ao passo polar τ.
ii. Para uma altura de aproximadamente (1/3) τ acima do bloco
136
estatórico, não há fluxo, independentemente do va)lor da corrente
estatórica.
Da expressão (AIV.8) para t = 0 e desprezando-se a constante K,
obtem-se:
= xcosJ
g.B 1
0
zτ
πµ
π
τ (AIV.28)
Da expressão (AIV.15) obtem-se para z = 0 na periferia do estator:
= xcosJB 10z
π
τµ (AIV.29)
Fazendo-se a igualdade das expressões (AIV.28) e (AIV.29), obtem-se:
π
τ=g (AIV.30)
AIV.2 CAMPO LONGITUDINAL EM CARGA NO ENTREFERRO
No MIL, procura-se sempre ter a máxima corrente atravessando cada uma
das bobinas do estator. Sendo assim, para motores de pequeno comprimento,
normalmente faz-se a opção da ligação das bobinas do estator em série. Para
motores de grande comprimento, os quais possuem muitas bobinas, as mesmas são
ligadas em paralelo.
Considerando uma folha de corrente sobre o estator, a densidade de corrente
dessa folha pode ser dada por:
−= 11111 xtvsen.Jj
τ
π
τ
π (AIV.31)
Onde v1 é a velocidade linear do campo transladante, e x1 representa a
distância do ponto em que está a origem do referencial do estator do motor.
Caso seja escolhido outro referencial, x2 posicionado no linor, então
pode-se escrever:
tvxx 221 += (AIV.32)

137
A densidade de corrente do rotor, face à densidade de corrente do estator,
relativamente ao eixo localizado no estator é dada por:
−== 1111121 xtvsen.Jjj
τ
π
τ
π (AIV.32)
Pelas expressões (AIV.31) e (AIV.32), pode-se demonstrar que a corrente no
linor referida ao referencial do próprio linor é dada por:
( ) ( )
−−=
+−= 2211221122 xtvvsen.Jtvxtvsen.Jj
τ
π
τ
π
τ
π
τ
π (AIV.33)
Na seção AIV.1 foi efetuado o estudo do comportamento do campo magnético
em vazio no entreferro do MIL. Colocando a chapa linórica, o MIL passa a operar em
carga, desde que haja movimento do linor. A Figura AIV.4 esquematiza o MIL
operando em carga e será sobre ela que serão feitas as próximas deduções.
Estator
Linor
y
ez
x2F
j1
∆x
A D
B C
Figura AIV.4 - MIL operando em carga.
Considerando o elemento de área formado pelo comprimento em segundo o
eixo x, ∆x, e segundo o eixo z, l.
Como se sabe, a f.e.m. induzida no ciclo fechado representado a tracejado,
está relacionada com a impedância dessa área da chapa linórica.
Pela lei de Faraday, a tensão induzida na chapa na área em estudo é dada
por:

138
( )
+−−=
∂∂
∂−
∂
∂−=
∂
∂= φ
τ
π
τ
π
τ
πρ 2121
2
22
2
22
2
22s
2 vvcosZJtx
jL
x
j
t
be (AIV.34)
Onde: ( )222
2
s2 LSZ ωρ += e 1vτ
πω =
ρs é a resistividade superficial do linor (ρv/t) e L22 o coeficiente de auto-
indução do linor por unidade de comprimento segundo as direções dos eixos x
e z, para a espessura t do linor na direção y. O ângulo φ é dado por:
s
22LSarctan
ρ
ωφ = (AIV.35)
Integrando-se a expressão (AIV.34) em relação a t, obtem-se:
( ) Cxtvvsenvv
ZJb 221
21
212 +
+−−
−= φ
τ
π
τ
π (AIV.36)
Onde C é a constante de integração, e é função da variável x2. Esta constante
pode ser determinada numa situação limite.
Assumindo que a densidade de fluxo magnético na transição do estator
(vértice do estator) é zero, a condição fronteira para a distribuição de fluxo é a
seguinte:
b2 = 0 em x1 = 0 ou x2 = -v2t Aplicando esta condição na expressão (AIV.36) obtem-se a expressão:
( ) ( ) ( ) ( )21
21
212221
21
21 xCtvsenvv
ZJxCtvtvvsen
vv
ZJ0 +
+
−=+
+−−−
−= φ
τ
πφ
τ
π
τ
π
Como a condição fronteira refere que x2 = -v2t pode-se afirmar que:
+−=
+ φ
τ
πφ
τ
π2
2
11 x
v
vsentvsen e do desenvolvimento anterior obtem-se:
( )
−
−= φ
τ
π2
2
1
21
212 v
v
vsen
vv
ZJxC (AIV.37)
Substituindo a expressão (AIV.37) em (AIV.36) obtem-se:

139
−−
+−
−= φ
τ
πφ
τ
π
τ
πtx
v
vsenxtvsen
vv
ZJb 2
2
111
21
212 (AIV.38)
Escrevendo a expressão (AIV.37) em relação ao referencial x1, obtem-se a
expressão que representa o fluxo longitudinal no entreferro, dada por:
−−
+−
−= φ
τ
πφ
τ
π
τ
πtx
v
vsenxtvsen
vv
ZJb 2
2
111
21
21 (AIV.39)
Analisando a expressão (AIV.39), constata-se que o campo magnético
longitudinal do entreferro é constituído por duas ondas. A primeira corresponde ao
campo girante das máquinas rotativas A sua velocidade é a velocidade síncrona, e
possui o comprimento de dois passos polares.
A segunda onda é denominada de “onda de efeito final”. O nome deriva do
efeito final, que é um fenômeno que surge no motor linear uma vez que a superfície
estatórica não é fechada, como no motor rotativo. Sendo assim, é refletida uma onda
que tem comprimento:
τλ1
22
v
v= .
Este fenômeno é idêntico ao que ocorre numa linha de transmissão onde a
onda incidente é refletida.
Verifica-se na Figura AIV.5 que a onda resultante não tem a forma senoidal, e
a freqüência da onda de efeito final depende do escorregamento. Sendo assim,
quanto maior for o escorregamento, maior a freqüência da onda de efeito final,
produzindo alterações na onda resultante.

140
Onda resultante
Onda transladante
Onda de efeito final
S=0.3
0
0
Onda resultante
Onda de efeito final
Onda transladante
S=0.5
0
0
Onda resultante
Onda de efeito final
Onda transladante
S=0.7
0
0
Figura AIV.5 – Representação das ondas de fluxo magnético no mesmo instante de
tempo no entreferro quando o escorregamento (s) toma os valores: 0.3, 0.5, e 0.7.
Um aspecto importante a ressaltar é o fato da onda refletida (onda de efeito
final) modular a onda incidente (onda transladante).
A Figura AIV.6 apresenta o fluxo no entreferro, dando uma idéia da sua
variação ao longo do tempo, para o valor constante para o escorregamento (s = 0.5).
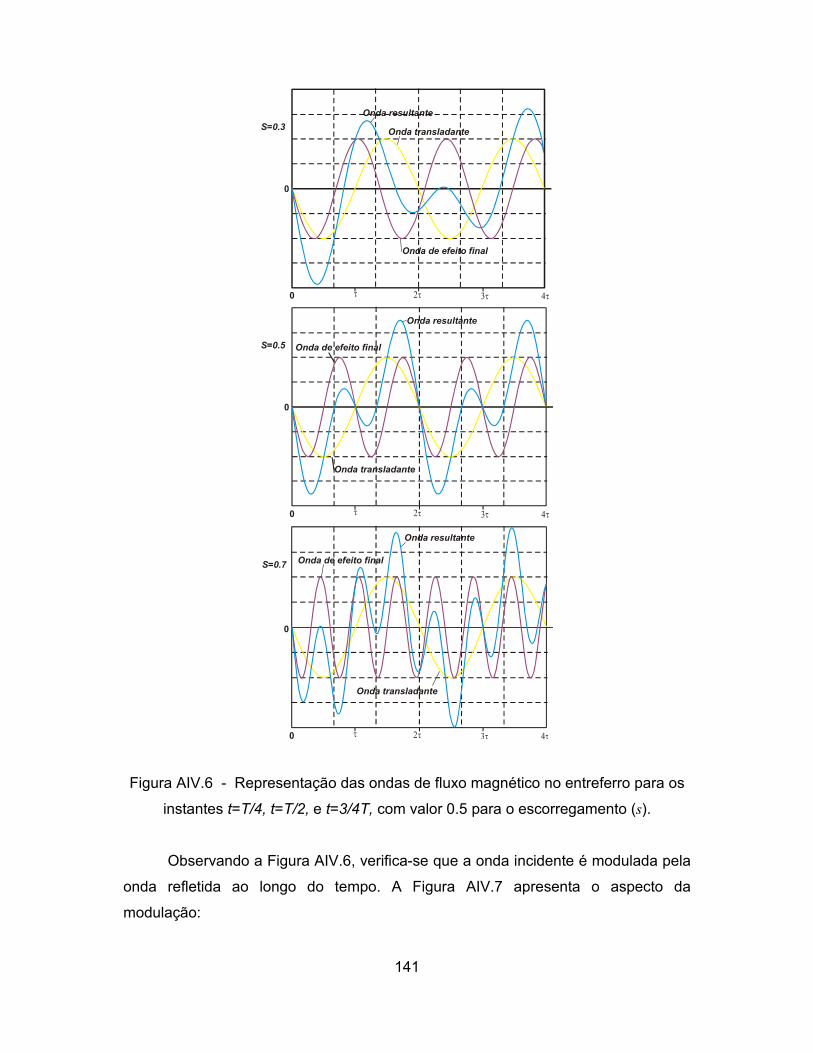
141
Onda resultante
Onda transladante
Onda de efeito final
S=0.3
0
0
Onda resultante
Onda de efeito final
Onda transladante
S=0.5
0
0
Onda resultante
Onda de efeito final
Onda transladante
S=0.7
0
0
Figura AIV.6 - Representação das ondas de fluxo magnético no entreferro para os
instantes t=T/4, t=T/2, e t=3/4T, com valor 0.5 para o escorregamento (s).
Observando a Figura AIV.6, verifica-se que a onda incidente é modulada pela
onda refletida ao longo do tempo. A Figura AIV.7 apresenta o aspecto da
modulação:
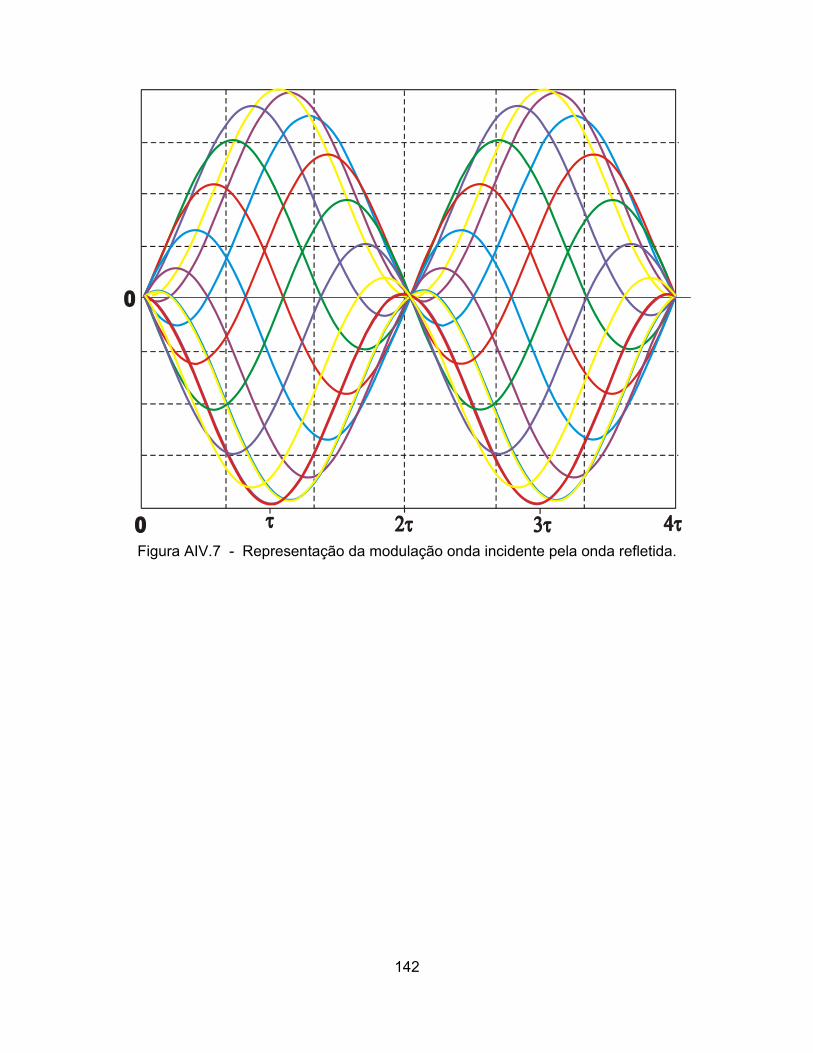
142
Figura AIV.7 - Representação da modulação onda incidente pela onda refletida.

143
ANEXO V
FATORES DE ENROLAMENTO PARA MOTORES
AV.1 FATOR DE ENROLAMENTO PARA O MIL
Os enrolamentos são executados em bobinas dispostas em ranhuras
praticadas nos pacotes dos indutores correspondentes. O número de ranhuras de
um estator trifásico é determinado pela equação:
q.p.3NRE = (AV.1)
Observa-se que estão presentes na equação o número de polos do pacote do
indutor e o número de ranhuras por pólo e por fase (q).
O passo polar (τ) pode ser determinado pela expressão:
=
p
D.πτ (AV.2)
Como as ranhuras estão distribuídas ao longo de um comprimento interno do
estator ou externo do rotor, pode-se estabelecer relação entre comprimento de
circunferência e número de ranhuras:
( ) REND. =π (AV.3)
=
p
NRERANHURASτ (AV.4)
Assim quando uma bobina tem um passo de bobina dado em ranhuras que é
igual ao passo polar, diz-se que o enrolamento é de Passo Pleno. Quando o

144
enrolamento tem um passo de bobina dado em ranhuras que é menor que o passo
polar, diz-se que o enrolamento é de Passo Encurtado ou fracionário.
Portanto, quando o enrolamento deixa de ocupar uma ranhura por pólo e por
fase, neste caso com o nome de enrolamento concentrado, e passa a ocupar duas
ou mais ranhuras por pólo e por fase, passa a ser denominado de enrolamento
distribuído, e seu tratamento é feito pela expressão:
pF .Z.f.22,2E φ= (AV.5)
passando a adotar equações em que estão presentes os fatores ligados ao
enrolamento, seja para o estator, seja para o rotor, isto é, na expressão (AV.5) o
valor da (fem) induzida em uma fase do enrolamento, deve receber fatores que
levem em conta a forma como o enrolamento está disposto nas respectivas
ranhuras.
AV.2 FATOR DE DISTRIBUIÇÃO PARA ENROLAMENTOS
A maioria das máquinas de indução trifásicas operam com enrolamentos
distribuídos em ranhuras e, portanto, a expressão (AV.5) não reflete com precisão o
valor da (fem) induzida em uma fase, para esses enrolamentos.
A expressão (AV.4) determina o passo de uma bobina para um
enrolamento.de passo pleno. Com a distribuição das bobinas em ranhuras, na região
de um polo, as (fems) induzidas nos condutores variam de ranhura para ranhura.
Como os condutores estão ligados em série e cada condutor está sob uma posição
do polo, a (fem) total induzida tem valor menor do que aquela que seria encontrada
se os condutores estivessem todos em uma ranhura por polo e por fase.
O valor do número de ranhuras por polo e por fase em que o enrolamento
está distribuído influi diretamente no valor da (fem) induzida, porque quanto maior for
o número de ranhuras por polo, mais espaçados estarão os condutores de uma fase
e consequentemente menor será o valor da (fem) induzida na fase.
Para que seja efetuado a correção do valor da (fem) final, aplica-se sobre a
expressão (AV.5) um fator corretor, denominado Fator de Distribuição,
representado por (kd).

145
Assim a expressão (AV.5) se torna:
dpF k..Z.f.22,2E φ= (AV.6)
onde:
=
q.3.2sen.q
3.2sen
kdπ
π
(AV.7)
(kd) é o Fator de Distribuição de um enrolamento distribuído.
AV.3 FATOR DE ENCURTAMENTO DE PASSO PARA ENROLAMENTOS
Um enrolamento em uma máquina de indução trifásica pode ter concentrado
ou distribuído e ter suas bobinas com passo pleno ou passo encurtado.
Assim, se o enrolamento além de distribuído, tiver bobinas de passo
encurtado, uma nova redução de tensão na expressão (AV.6) deverá ser
introduzida, pois as bobinas têm seus lados em ranhuras diferentes daquelas
apresentadas na Figura AV.1.
EA
1 2 3 4 5 6 7 8 9 10 11 12 13 14
SA
Figura AV.1 - Distribuição das bobinas no estator para uma fase do enrolamento

146
As razões para utilização do encurtamento do passo em enrolamentos são
devidas a:
a) Com o encurtamento do passo das bobinas, a testa do enrolamento torna-
se menor e as bobinas têm maior rigidez mecânica. A reatância de
dispersão que tem na testa de bobina um de seus principais componentes
tem seu valor reduzido quando se introduz o encurtamento de passo,
modificando os parâmetros do circuito elétrico equivalente da máquina, o
que modifica sua corrente em vazio, sua corrente de partida e seu
conjugado.
b) Com o encurtamento do passo da bobina, consegue-se diminuir a
influência de alguns harmônicos espaciais do fluxo. Isto é extremamente
benéfico para o comportamento do conjugado do motor no seu estágio de
aceleração e para a forma final do sinal de força eletromotriz induzida nas
fases do enrolamento.
Assim, o arco geométrico formado por dois lados de bobina em ranhuras é
encurtado em relação ao arco de um enrolamento de passo pleno. O comprimento
deste referido arco, tomado formado quando a bobina faz espiras em ranhuras, vem
caracterizar o Passo da Bobina. Quando uma bobina, nascendo exatamente na
frente de um polo, atinge uma ranhura que se localiza exatamente à frente de um
polo adjacente e de nome contrário, a bobina é denominada de Passo Pleno e o
enrolamento em questão é de passo pleno ou de passo polar. Quando isto é
obedecido, as (fems) induzidas em cada condutor ativo nas ranhuras distanciadas de
um passo polar são iguais porque estão sob fluxos polares de mesma intensidade,
porém, de valor contrário.
Entretanto de o passo da bobina for reduzido ou encurtado, os lados de uma
mesma bobina ocupam ranhuras que não estão distanciadas de 180 ºE e as (fems)
nos condutores de uma mesma ranhura são iguais em amplitude e em fase. Como já
ressaltado anteriormente, existem vantagens no encurtamento de passo e redução
da testa de bobina. A bobina torna-se mais leve, resultando a princípio, numa
aparente economia de cobre.
Com a adoção do passo encurtado, as (fems) induzidas nos condutores ativos
que estão colocados nas ranhuras escolhidas para a bobina não estão em fase, de

147
forma que a (fem) final da bobina de passo encurtado tem valor menor do que aquela
obtida com enrolamento de passo pleno.
A relação entre a (fem) final gerada em uma bobina de passo encurtado, e a
(fem) induzida em uma bobina de passo pleno, tendo as bobinas os mesmos
números de espiras, gera o Fator de Encurtamento de Passo ou Fator de Passo
de um enrolamento (kp), e é definido por:
pp
pe
PE
Ek = (AV.8)
onde, (Epe) é a (fem) induzida para enrolamento de passo encurtado e (Epp) é a (fem)
induzida para enrolamento de passo pleno.
Para o desenvolvimento matemático do Fator de Encurtamento de Passo
deve-se procurar um método que possa ser aplicável em todos os casos, o qual
consiste em determinar o ângulo de encurtamento de passo a partir das ranhuras
que foram “puladas”. Determinando o ângulo que cada ranhura do pacote do estator
representa para a máquina e tendo o número de ranhuras que foram “puladas”,
determina-se o ângulo de encurtamento do enrolamento, com isso é definido o valor
de (kp) como fator de encurtamento de passo do enrolamento em função do ângulo
de encurtamento do enrolamento (β), que representa o Passo da Bobina em forma
angular, e é definido por:
=
2senkP
β (AV.9)
O Fator de Enrolamento (kw) para o enrolamento das máquinas de indução
pode então ser definido como:
pdw k.kk = (AV.10)

148
ANEXO VI
CÁLCULO DA FORÇA PROPULSORA
AVI.1 CÁLCULO DA FORÇA PROPULSORA DESENVOLVIDA PELO MIL
Para o cálculo da força propulsora foram utilizados o equacionamento
apresentado no Capítulo III, e os dados da Tabela AVI.1, abaixo.
DADOS DO MIL VALOR
Velocidade linear síncrona 7,8 m/s
Tensão de operação 220 V
Freqüência nominal de alimentação 60 Hz
Temperatura operacional do enrolamento do estator 120 ºC
Temperatura operacional do linor 70 ºC
Escorregamento Nominal 20 %
Espessura do linor 6 mm
Material do linor Alumínio
Entreferro nominal 9 mm
Fator de enrolamento 1
Número de indutores ativos 2
Número de polos 4
Passo polar do estator 6,5 cm
Largura real do estator 5 cm
Largura do linor 16 cm
Número de condutores ativos por indutor e por fase 150
Comprimento total do estator 40 cm
Altura do pacote do estator 5 cm
Número de ranhuras do estator 15
Corrente máxima obtida nos ensaios 15 A
Densidade linear de corrente A determinar
Densidade de campo magnético A determinar
Força propulsora A determinar
Tabela AVI.1 – Dados do MIL utilizado

149
A velocidade do campo girante (Vsx) é obtida da expressão (3.9):
s/m8,760.065,0.2f..2Vsx === τ
O valor da densidade linear de corrente (JS) é obtido da expressão (3.14):
m/A7,129807065,0.4
1.15.750.3
.p
k.I.N.3J
wfmf
s ===τ
O valor da densidade linear de corrente (JM) no seu valor máximo é obtida de:
m/A8,1835752.7,1298072.JJ sM ===
O valor da densidade de campo magnético (BS) é dado peça expressão (3.33):
Wb275,0
10.42,273
8,7.2,0
10..4.065,0
10.9.
8,183575
V.s
.
g.
JB
2
8
2
7
32
r
sx
2
0
1s =
+
=
+
=
−−
−
π
π
ρµτ
π
O valor de (δs) é dado pela expressão (3.34):
( ) 54533,06067,08,7.2,0.065,0.10..4
10.9.10.42,273.
V.s..
g..tg s7
38
sx0
rs =⇒===
−
−−
δπ
π
τµ
ρπδ
O valor da força propulsora é dada pela expressão (3.78):
N55,280)54533,0cos(2
8,183575.275,0.065,0.4.05,0)scos(
2
J.B..p.cf Ms
x === δτ

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas
Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo





























