Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTECENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
PROJETO DE UM SENSOR DE ESTACIONAMENTO
Disciplina: Instrumentação EletrônicaProfessor: Luciano Fontes CavalcanteAlunos: Marcos José dos Santos
João Kleber

1 - Sensor de estacionamento
O sensor de estacionamento é um módulo eletrônico baseado em tecnologia ultra-som, cuja finalidade é o auxílio ao condutor durante o estacionamento, alertando-o em relação a proximidade de obstáculos.
A abrangência do trabalho é teórica e prática, relativa às teorias conhecidas de ultra-som. O desenvolvimento dar-se-á através da criação de esquemático elétrico, do lay-out da placa, e programação.
Figura 1 Figura 2
2 - Sensor ultrassônico
Sensores ultra-sônico são elementos piezo cerâmicos que se propagam ou recebem ultra-som no ar numa faixa de freqüência acima de 20kHz, que não são perceptíveis pelo ouvido humano.
Figura 3
Os sensores ultra-sônicos são apropriados para o uso das escalas da detecção ao máximo de 5m.Faremos uso de um sistema Pulse Burst (Sonar) que é baseado no princípio depth sounding do
eco, ou conhecido também como Pulso eco, onde os sensores são excitados periodicamente, em seqüência , e transmitem então os sinais de ultra-som. Os sensores são ativados pelo sinal recebido da reflexão do obstáculo e para o cálculo da posição do objeto em relação ao veículo, é medido o tempo da emissão do sinal até o mesmo ser refletido no objeto e retornar ao sensor.

3 - Diagrama Elétrico
Figura 4
O diagrama de blocos da Figura 4 define a interligação do sistema operando em uma cápsula, ou seja, um sensor só. Quanto ao diagrama de bloco da Figura 5, com 2 sensores, define-se melhor o circuito de amplificadores discriminando cada um deles.
Figura 5
O circuito de recepção utiliza quatro estágios de amplificadores a transistor, sendo que os três primeiros estão sintonizados em 40kHz e o último amplifica o sinal de áudio, a sua envoltória.

LEGENDA:A1, A2 e A3: Amplificadores de 40 kHz e ganho ~35;A4: Amplificador de áudio e ganho ~35;US: Ultra-som;BZ: Aviso sonoro;LD: Conjunto de LEDs
4 - Circuito de transmissão:O circuito transmissor é excitado através do sinal NA_TX que vem do processador, gerando 10
pulsos de 40kHz (Ton = 12us e Toff = 13us) num intervalo aproximado de 50ms. Este sinal é ligado na base dos transistores TR6 e TR5. A cápsula está montada em uma ponte H entre os sinais S1_GND e S1_TR, assim, quando há uma subida no sinal (Ton), TR6 e TR7 conduzem corrente através da cápsula dando um pulso positivo na cápsula, e quando o pulso de NA_TX está em baixa (Toff) o TR5 e TR8 conduzem corrente através da cápsula e gera o pulso negativo na cápsula apresentando então um pulso de 24V pico a pico nas extremidades da cápsula.
Figura 6O capacitor na base do transistor permite a passagem do sinal transitório evitando acionamento
com valores contínuos, apenas TR6 não tem capacitor devido à recepção do sinal, descritos no circuito de recepção.
5 - Circuito de RecepçãoA mesma cápsula de transmissão é usada na recepção do sinal, ou seja, após um tempo em torno
de 2ms (depende do modelo da cápsula) o sinal NA_TX é colocado em nível alto para que o TR6 entre em condução e conecte um dos pinos da cápsula ao terra. Nesta configuração o circuito fica em posição de recepção. O sinal refletido em algum objeto é injetado através da cápsula no S1_TR que é amplificado na freqüência de 40kHz nos três primeiros estágios, sendo que o estágio subseqüente é a amplificação do detector de envoltório. A configuração dos amplificadores é a transistor emissor comum.
Figura 7

6 – IHM (Interface Homem Máquina)
A interface sonora funciona por um sinal BUZZ vindo do processador, que emite trem de pulsos conforme a faixa de distância detectada, de uma faixa espaçada, intermediária e por fim um sinal contínuo. Transistor TR37 funciona como um chave, ligando e desligando os 12V sobre o buzzer.
Figura 8
A interface visual funciona com um sinal de comando do processador em nível lógico 1 acionando a base dos transistores BC817 e estes acionam os leds, que por sua vez, tem as cores definidas com base nas distâncias.
Distância longa aciona led verde (~90cm a ~60cm);Distância intermédiária aciona led amarelo (~60cm a ~30cm);Distância curta aciona led vermelho (~<30cm).
Microcontrolador
O microcontrolador utilizado será o Microchip, da família PIC16F, que atende as necessidades do sensor de estacionamento; é um microcontrolador de 8bits, de alta performance RISC. Tem um comparador interno, um oscilador externo a cristal ou ressonador interno utilizando um RC externo com memória flash de 1024 word, 64 bytes de SRAM e 128 Bytes de EEprom.
A configuração dos pinos do micro para projeto é a seguinte: OSC1 e OSC2 – Conexão do ressonador externo de 4MHz; RA0 – Sinal do NA_S1, recebe infromações do sensor referente à posição e distância do objeto; RA1 – Sinal do NA_S2, espera para projeto de 4 sensores ou outro se necessário; RC0 e RC2 – Sinal da distância visual; RC3 – Buzz, sinal da distância sonora; RC4 e RC5 - Rx e Tx para serial, usado futuramente se necessário para depuração do sistema. RA3 – Não utilizado

Figura 9
O processador tem a tarefa de emitir os pulsos e aguardar resposta dos periféricos e processar essa informação dando a posição ou à distância do veículo ao objeto.
Fluxogramas do software
Figura 10
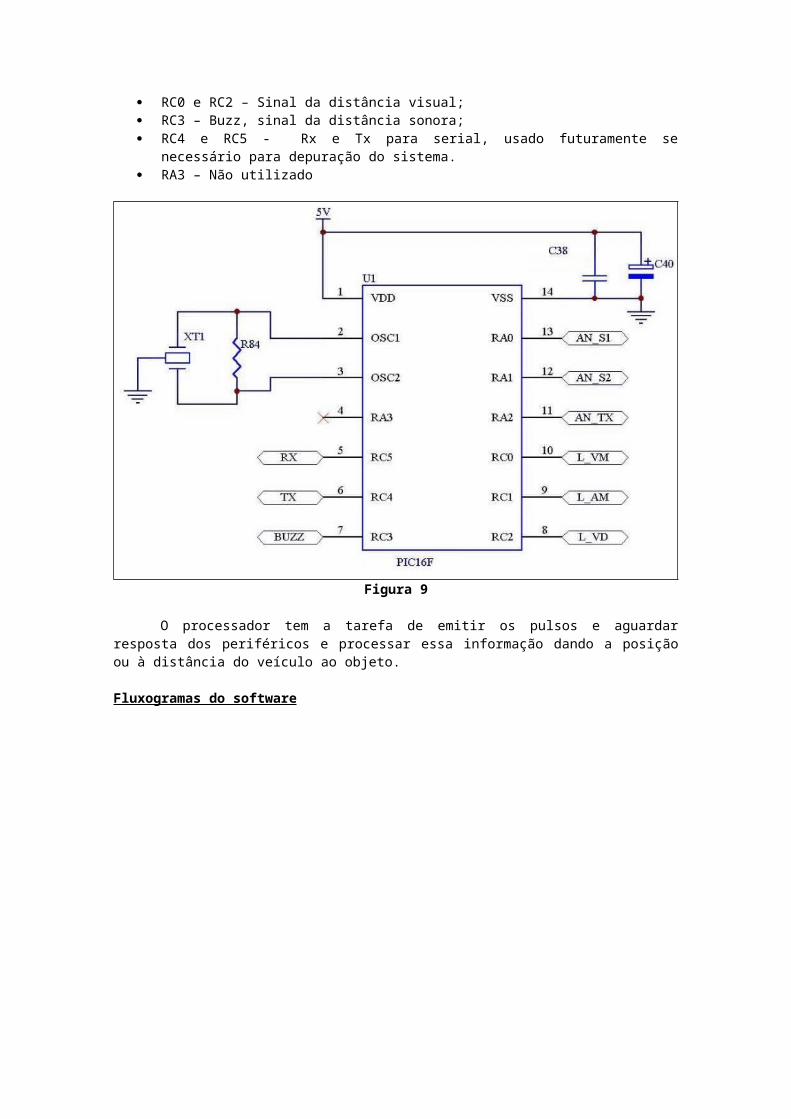
Figura 11

Figura 12






![1000%20 perguntas%20e%20respostas%20sobre%20teoria%20geral%20do%20estado%20de%20jose%20cretella%20jr.%20&%20jose%20cretella%20neto[1]](https://img.document.onl/doc/110x75/54ca53534a79592b528b45cd/100020-perguntas20e20respostas20sobre20teoria20geral20do20estado20de20jose20cretella20jr2020jose20cretella20neto1.jpg)















![Projeto%20de%20 educação%20para%20a%20sexualidade%20e%20afetos%20apresentação[1]](https://img.document.onl/doc/110x75/54a064c9ac7959454c8b4b4c/projeto20de20-educacao20para20a20sexualidade20e20afetos20apresentacao1.jpg)



![Oceanos%20e%20Mares%20Ameaçados[1].pptx 3](https://img.document.onl/doc/110x75/5572004b49795991699f2b87/oceanos20e20mares20ameacados1pptx-3.jpg)


