Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE JUIZ DE FORA
DEPARTAMENTO DE ENGENHARIA DE PRODUÇÃO E MECÂNICA
CURSO DE GRADUAÇÃO EM ENGENHARIA MECÂNICA
RAPHAEL OTE OLIVEIRA
MODELAGEM COMPUTACIONAL E ANÁLISE EXPERIMENTALDINÂMICA ESTRUTURAL DA ASA DE UM VEÍCULO AÉREO NÃO
TRIPULADO
Juiz de Fora
2018

RAPHAEL OTE OLIVEIRA
MODELAGEM COMPUTACIONAL E ANÁLISE EXPERIMENTALDINÂMICA ESTRUTURAL DA ASA DE UM VEÍCULO AÉREO NÃO
TRIPULADO
Trabalho de Conclusão de Curso apresentadoà Faculdade de Engenharia da UniversidadeFederal de Juiz de Fora, como requisito par-cial para a obtenção do título de Bacharel emEngenharia Mecânica.
Orientador: Vitor Mainenti Leal Lopes
Coorientador: Flávio de Souza Barbosa
Juiz de Fora
2018

RAPHAEL OTE OLIVEIRA
MODELAGEM COMPUTACIONAL E ANÁLISE EXPERIMENTALDINÂMICA ESTRUTURAL DA ASA DE UM VEÍCULO AÉREO NÃO
TRIPULADO
Trabalho de Conclusão de Curso apresentadoà Faculdade de Engenharia da UniversidadeFederal de Juiz de Fora, como requisito par-cial para a obtenção do título de Bacharel emEngenharia Mecânica.
Aprovada em 20 de Junho de 2018.
BANCA EXAMINADORA
Vitor Mainenti Leal Lopes - OrientadorUniversidade Federal de Juiz de Fora
Professor Dr. Flávio de Souza BarbosaUniversidade Federal de Juiz de Fora
Professor Dr. Marco Aurélio da Cunha AlvesUniversidade Federal de Juiz de Fora

AGRADECIMENTOS
Destino meus singelos agradecimentos:
Primeiramente, a minha tia Vani, expressando o meu muito obrigado por tudo. Pelocarinho nesses anos, muitas vezes me considerando como filho, e no apoio incondicionalem todos os momentos.
A minha mãe, pela alegria e o jeito leve de viver. Demonstrando que viemos paraser felizes, não importando os problemas da vida.
Ao meu primo Renato, pelos conselhos e pela história de superação. O exemploreal que a motivação, quando direcionada, nos impulsiona a ir além das dificuldades elimitações. Ao meu tio, Valdorimo, pelo seu caráter e senso de responsabilidade traduzindoem seu bom coração para ajudar as pessoas.
Ao professor Flavio,da Faculdade Federal de Juiz de Fora, pelos ensinamentostransmitidos, dedicação e ,principalmente, paciência como orientador.
Agradeço, de forma igual, ao professor Vitor, pela transmissão da sua experiênciaprática industrial e a orientação desde o tempo de participação no projeto Microraptor.
A equipe Microraptor UFJF, em especial aos amigos Antônio, Gabriel e Guilhermepelas piadas contadas, imitações e bons momentos vividos. Só tenho a agradecer porconhecer pessoas virtuosas como vocês.
Peço desculpas caso tenha esquecido de alguém, mas sintam-se agradecidos igual-mente pela ajuda na minha graduação.

RESUMO
A modelagem dinâmica de estruturas aeronáuticas possui grande relevância na indústriaaeroespacial, principalmente pela sua demanda por estruturas mais leves e, por consequên-cia, mais flexíveis. O conhecimento para determinar as condições em que a aeronave nãopasse por problemas dinâmicos estruturais como a ressonância é fundamental no projeto.Porém, a modelagem por si só não é capaz de prever todos os comportamentos dinâmi-cos, necessitando de métodos experimentais para a sua validação. O objetivo principaldeste estudo é a validação através de ensaios experimentais de um modelo dinâmico emelementos finitos para uma asa flexível de um veículo aéreo não tripulado. A sua validaçãoexperimental é feita por métodos bem estabelidos e já conhecidos como ground vibrationtest (GVT).A modelagem mostrou-se confiável e válida para a identificação das frequênciasnaturais e as formas modais de vibrações dos primeiros modos de flexão e torção comerros relativos aceitáveis menores que 10%. A contribuição futura do trabalho será desuma importância ao fornecer uma metologia para a detecção da resposta estrutural auma variedade de forças excitatórias.
Palavras-chave: Análise modal experimental, dinâmica aeronáutica, elementos finitos,modelagem computacional de uma asa de VANT.

ABSTRACT
The dynamic modeling of aeronautical structures has great relevance in the aerospaceindustry, mainly due to its demand for lightweight structures, and, consequently, moreflexible. The knowledge to determine the conditions in which the aircraft does not gothrough with dynamic structural problems is fundamental in the design of the aeronauticalstructure. However, the modeling alone is not able to predict all the dynamic behaviors,requiring experimental methods for its validation. The main purpose of this study was thevalidation through experimental tests of a finite element model for a flexible wing of anunmanned aerial vehicle. Its experimental validation is done by well-established methodsknown as ground vibration test (GVT). The modeling proved to be reliable and valid forthe identification of the natural frequencies and the modal vibrations of the first modes ofbending and twisting with errors relative to less than 10 %. The future contribution ofthe work will be of paramount importance in providing a methodology for the detection ofthe structural response to a variety of excitatory forces.
Key-words:Aeronautical dynamics, finite elements ,modal experimental analysis modelingof a UAV’s wing

LISTA DE ILUSTRAÇÕES
Figura 1 – Diagrama de interação dos fenômenos aeroelásticos . . . . . . . . . . . 14Figura 2 – Teste de Flutter para o protótipo do VANT . . . . . . . . . . . . . . . 15Figura 3 – Ensaio GVT em um drone X-56A da NASA . . . . . . . . . . . . . . . 16Figura 4 – Cargas Determínisticas e Não Determínistricas . . . . . . . . . . . . . . 19Figura 5 – Sistema dinâmico composto por massa, mola e amortecedor para um
grau de liberdade: (a) componentes atuantes no sistema, sendo k aconstante de rigidez da mola, c a constante de amortecimento viscoso;e m a massa total do sistema; x (t) o deslocamento dinâmico e p (t) aforça atuante no sistema; (b) forças atuantes no bloco . . . . . . . . . . 20
Figura 6 – Diversos tipos de amortecimentos . . . . . . . . . . . . . . . . . . . . . 21Figura 7 – Deformações da viga engastada-livre com carregamento pontual . . . . 22Figura 8 – Eixo submetido a um torque constante . . . . . . . . . . . . . . . . . . 23Figura 9 – Elemento tridimensional de massa dm. . . . . . . . . . . . . . . . . . . 24Figura 10 – Sistema de eixos adotados para o cálculo dos momentos de inércia. . . 25Figura 11 – Representação da modelagem em vigas com cargas distribuídas ao longo
da asa (Beam-like) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Figura 12 – Asa discretizada em elementos finitos por cascas e vigas (Box-Like) . . 27Figura 13 – Elemento de viga com dois nós . . . . . . . . . . . . . . . . . . . . . . 27Figura 14 – Elemento torcional de cilindros . . . . . . . . . . . . . . . . . . . . . . 28Figura 15 – Configuração típica para instrumentação de análise modal . . . . . . . 30Figura 16 – Condição livre-livre para um avião em escala . . . . . . . . . . . . . . . 31Figura 17 – Asa suportada na base com excitação senoidal . . . . . . . . . . . . . . 32Figura 18 – Resposta estrutural a um teste de impacto . . . . . . . . . . . . . . . . 32Figura 19 – Ensaios de estruturas civis com tensionamento de cabos . . . . . . . . 33Figura 20 – O sensor IEPE fornece sinais elétricos proporcionais a força aplicada . 34Figura 21 – Disposição correta dos cabos . . . . . . . . . . . . . . . . . . . . . . . . 35Figura 22 – Comparação com o shaft de frequência mediante a troca da fixação . . 35Figura 23 – Tipos de Fixação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Figura 24 – Representação do sinal em diferentes domínios . . . . . . . . . . . . . . 38Figura 25 – Limite da perda de informação por aliasing em função da frequência
normalizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Figura 26 – Sinal contendo N amostras temporais convertido pela DFT no domínio
da frequência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Figura 27 – Semiasa da aeronave AM219 . . . . . . . . . . . . . . . . . . . . . . . . 42Figura 28 – Longarina quadrada com fibras de carbono perpendiculares . . . . . . . 42Figura 29 – Módulo de Young de acordo com a densidade . . . . . . . . . . . . . . 43Figura 30 – Compensado de Caixeta . . . . . . . . . . . . . . . . . . . . . . . . . . 43Figura 31 – Peso dos componentes disponibilizado por balanças resistivas . . . . . . 44

Figura 32 – Condicionar de sinais ADIS 1800 . . . . . . . . . . . . . . . . . . . . . 45Figura 33 – Comparação geométrica entre uma moeda e o acelerômetro em estudo . 45Figura 34 – Características geométricas do perfil . . . . . . . . . . . . . . . . . . . 46Figura 35 – Ensaio esquemático para a determinação da rigidez . . . . . . . . . . . 47Figura 36 – Dispositivo mecânico para aplicação de Torque do teste de rigidez torcional 47Figura 37 – Sistema de eixos adotados para o cálculo dos momentos de inércia. . . 48Figura 38 – Propriedades de Inercia para a asa modelada no solidworks . . . . . . . 49Figura 39 – Entradas do algoritmo em Matlab R© . . . . . . . . . . . . . . . . . . . 50Figura 40 – Entradas do algoritmo para elementos de flexão . . . . . . . . . . . . . 50Figura 41 – Parâmetros operacionais do primeiro ensaio . . . . . . . . . . . . . . . 52Figura 42 – Parâmetros operacionais do segundo ensaio . . . . . . . . . . . . . . . . 53Figura 43 – Parâmetros operacionais do terceiro ensaio . . . . . . . . . . . . . . . . 53Figura 44 – Resposta temporal para o primeiro ensaio . . . . . . . . . . . . . . . . 54Figura 45 – Resposta temporal para o segundo ensaio . . . . . . . . . . . . . . . . 54Figura 46 – Resposta temporal para o terceiro ensaio . . . . . . . . . . . . . . . . . 54Figura 47 – Espectros de frequência com a média de todos os ensaios . . . . . . . . 55Figura 48 – Modo experimental para a primeira frequência . . . . . . . . . . . . . . 56Figura 49 – Modo experimental para a segunda frequência . . . . . . . . . . . . . . 56Figura 50 – Modo experimental para a terceira frequência . . . . . . . . . . . . . . 57Figura 51 – Primeiro modo de flexão interpolado . . . . . . . . . . . . . . . . . . . 57Figura 52 – Primeiro modo de flexão lateral interpolado . . . . . . . . . . . . . . . 58Figura 53 – Primeiro modo de torção interpolado . . . . . . . . . . . . . . . . . . . 58Figura 54 – Primeiro modo de flexão do algoritmo . . . . . . . . . . . . . . . . . . 59Figura 55 – Primeiro modo de flexão do algoritmo . . . . . . . . . . . . . . . . . . 59Figura 56 – Primeiro modo de flexão do algoritmo . . . . . . . . . . . . . . . . . . 61Figura 57 – Primeiro modo de torção do algoritmo . . . . . . . . . . . . . . . . . . 61
LISTA DE TABELAS
Tabela 1 – Dimensões Geométricas da Asa . . . . . . . . . . . . . . . . . . . . . . 44Tabela 2 – Dados Experimentais teste de flexão . . . . . . . . . . . . . . . . . . . 48Tabela 3 – Dados Experimentais teste de torção . . . . . . . . . . . . . . . . . . . 48Tabela 4 – Comparação da simulação numérica com valores teóricos . . . . . . . . 60Tabela 5 – Validação da simulação numérica . . . . . . . . . . . . . . . . . . . . . 60

LISTA DE ABREVIATURAS E SIGLAS
A/D Analógico-Digital
CAD Projeto assistido por computador (computer aided design)
EPS Poliestireno Expandido (Expanded PolyStyrene)
FFT Transformada rápida de fourier (Fast Fourier Transform)
GVT Teste de Vibração em solo (Ground Vibration Test)
IEPE Circuito integrado piezoelétrico (Integrated Circuit Piezoeletric )
MDF Placa de fibra de média densidade (Medium Density Fiberboard)
MEF Método dos Elementos Finitos
NVH Ruído, vibrações e aspereza (Noise, vibration and harshness)
VANT Veículo aéreo não-tripulado
LISTA DE SÍMBOLOS
A matriz simétrica
AI tensor de inércia
B constante de integração
c coeficiente de amortecimento
C matriz de coeficientes de amortecimento
cc amortecimento crítico
χ momento de inércia de massa por unidade de comprimento
E módulo de elasticidade do material
EI rigidez flexional
fI força inercial
fd força de amortecimento
fe força elástica
fs frequência de amostragem
I momento de inércia de área
Ixx momento de inércia de massa em relação ao eixo x
Ixy produto de inércia de massa em relação ao eixo x e y
Iyy momento de inércia de massa em relação ao eixo y
Iyz produto de inércia de massa em relação ao eixo y e z
Izz momento de inércia de massa em relação ao eixo z
Izx momento de inércia de massa em relação ao eixo x e z
G módulo de elasticidade transversal
G’ ponto espacial
GJ rigidez torcional
Γ matriz de acoplamento
k coeficiente de rigidez

k matriz de rigidez do elemento flexional
kt matriz de rigidez do elemento torcional
λ autovalores
K matriz de rigidez da estrutura
Ke matriz de rigidez global da estrutura
L comprimento da estrutura
Le comprimento do elemento
m massa da estrutura
m matriz de massa consistente do elemento flexional
ml matriz de massa concentrada do elemento flexional
mt matriz de inercia do elemento torcional
µ massa distribuida
M matriz de massa da estrutura
Me matriz de massa global da estrutura
p força atuante no sistema
P vetor de forças externas
P força transversal
φ vetor modal
T torque
ωn frequência natural
ωd frequência natural amortecida
ωf primeira frequência flexional teórica
ωt primeira frequência torcional teórica
% fator de amortecimento
ξ taxa de amortecimento
X matriz de autovetores

SUMÁRIO
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.2 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 REVISÃO BIBLIOGRÁFICA . . . . . . . . . . . . . . . . . . . 172.1 Análise computacional dinâmica estrutural e validaçao em estruturas
aeronáuticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . 193.1 Conceitos Básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Sistemas de um grau de liberdade . . . . . . . . . . . . . . . . . . . . . 193.3 Vibração Livre com amortecimento viscoso . . . . . . . . . . . . . . . . 203.4 Sistemas com múltiplos graus de liberdade . . . . . . . . . . . . . . . . 213.5 Determinação das frequências naturais e modos de vibração . . . . . . . 213.6 Deformação de uma viga mediante a carga transversal . . . . . . . . . . 223.7 Torção de barras uniformes . . . . . . . . . . . . . . . . . . . . . . . . 233.8 Momentos de inércia de massa . . . . . . . . . . . . . . . . . . . . . . . 233.9 Método dos elementos finitos . . . . . . . . . . . . . . . . . . . . . . . 263.10 Formulação dos elementos de viga . . . . . . . . . . . . . . . . . . . . . 273.11 Formulação dos elementos de torção . . . . . . . . . . . . . . . . . . . . 28
4 ANÁLISE EXPERIMENTAL . . . . . . . . . . . . . . . . . . . 304.1 Suporte Mecânico e Força de Excitação . . . . . . . . . . . . . . . . . . 314.2 Acelerômetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.1 Especificações dos Acelerômetros . . . . . . . . . . . . . . . . . . . . . . 364.2.1.1 Amplitude da vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.1.2 Frequência de Ressonância . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.1.3 Sensibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.1.4 Número de Eixos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2.1.5 Peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2.1.6 Ruído . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3 Processamento de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3.1 Amostragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3.2 Transformada Rápida de Fourier . . . . . . . . . . . . . . . . . . . . . 394.3.3 Condicionadores de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3.3.1 Conversores Analógico-digitais . . . . . . . . . . . . . . . . . . . . . . . 40

5 MATERIAIS E MÉTODOS . . . . . . . . . . . . . . . . . . . . 425.1 Materiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.1.1 Estrutura da meia asa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.1.2 Propriedades Geométricas . . . . . . . . . . . . . . . . . . . . . . . . . . 445.1.3 Sistema de Aquisição . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.1.4 Acelerômetros de Ensaio . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 Métodos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.2.1 Ensaio de rigidez da estrutura . . . . . . . . . . . . . . . . . . . . . . . 465.3 Definição do momento de inércia de massa da asa . . . . . . . . . . . . 485.3.1 Algoritmo de simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6 ANÁLISES E RESULTADOS . . . . . . . . . . . . . . . . . . . 526.1 Testes na Estrutura Real . . . . . . . . . . . . . . . . . . . . . . . . . . 526.1.1 Resultados do teste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.1.2 Comparação com o modelo numérico . . . . . . . . . . . . . . . . . . . . 596.2 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
ANEXO A – TERMO DE AUTENTICIDADE . . . . . . . . . 66

14
1 INTRODUÇÃO
Devido ao constante desenvolvimento tecnológico, pesquisas vêm sendo feitas nabusca por novos materiais e na sua utilização cada vez mais diversificada, ocasionandona criação de estruturas mais leves, seguras e confiáveis. Na indústria aeronáutica essasmelhorias são focadas no desempenho e eficiência de uma aeronave em uma dada missão,acarretando em estruturas otimizadas, porém com maior flexibilidade. Em consequênciadisso, essas estruturas estão mais suscetíveis a problemas dinâmicos, tais como: fenômenosaeroelásticos, vibrações e ruídos.
Bisplinghoff (2002) , Fung (2002) e Wright (2015) citam a aeroelasticidade comofenômenos que envolvem a interação entre forças inerciais, aerodinâmicas e elásticas.Devendo-se estudar e escolher o melhor modelo para representá-las então, uma vez quealguns desses fenômenos possam levar potencialmente a falhas estruturais, ou a problemasde instabilidade e respostas da estrutura.A figura 1 ilustra o diagrama de Collar (1974)que correlaciona essas interações.
Figura 1 – Diagrama de interação dos fenômenos aeroelásticos
Fonte: Collar (1974)
Frequentes problemas envolvendo a estabilidade dos sistemas aero elásticos sãoresponsáveis por erros em fase avançadas de projetos. No estudos das vibrações, Rao(2017) cita que haverá o aparecimento do fenômeno da ressonância quando a frequêncianatural da estrutura coincida com a frequência externa de excitação. Como consequência,os deslocamentos da estrutura serão amplificados, originando falhas catastróficas. Logo, apreocupação inicial do projetista é evitar que as frequências de trabalho estejam foram daressonância estrutural.
A dinâmica estrutural de aeronaves engloba as mais diversas partes da aeronavecomo asa, aileron, empenagem e trem de pouso. Porém, até pela função primordial de

15
sustentação que é feita pela asa, esse componente é mais estudado do ponto de vistaprático.A figura 2 mostra um teste prático de flutter feito pela equipe de AerodesignMicroraptor da Faculdade Federal de Juiz de Fora. Nota-se que o colapso da asa levariafatalmente o fim do voô da aeronave.
Figura 2 – Teste de Flutter para o protótipo do VANT
As equações diferenciais lineares tem enorme contribuição na modelagem dos even-tos, porém os elementos aeronáuticos evoluem diariamente em complexidade, traduzindoem modelos custosos do ponto de vista computacional e tecnológico. Os métodos doselementos finitos, MEF, é um procedimento numérico que determina as soluções dessasequações diferenciais no domínio do problema. Modelos nesse formato, permitem aoprojetista que uma estrutura complexa possa ser simulada e submetida a diversos testes esituações antes de sua fabricação.Portanto, construir um modelo computadorizado doseventos contribui significantemente na predição dessas catástrofes no projeto da aeronave.
Fu e He (2001) citam, porém, que apenas a modelagem computacional não é capazde determinar o comportamento dinâmico da estrutura, devido as propriedades comoamortecimento, não linearidade e condições de contorno possuírem na prática incertezasquando modeladas de maneira tradicional. Portanto, ensaios experimentais são necessáriospara o ajuste do modelo computacional proposto.
As análises de vibração no solo (em inglês Ground Vibration Test, ou GVT), comoilustrado na figura 3, é uma importante ferramenta experimental para a certificação evalidação de modelos analíticos de vibração e modelos de controle de voo. Através deacelerômetros colocados em pontos específicos da estrutura são obtidas as respostas daestrutura no tempo para uma excitação de entrada, comumente por meio de um martelode impacto ou shakers. Com isso, a identificação das frequências naturais e das formasdos modos de vibração é feita para a estrutura.

16
Figura 3 – Ensaio GVT em um drone X-56A da NASA
Fonte: Nasa (2014)
1.1 Objetivo Geral
Define-se o objetivo geral deste trabalho a validação através de ensaios experimentaisde um modelo baseado no MEF capaz de simular o comportamento dinâmico de uma asaflexível de veículos aéreos não tripulados (VANTs).
1.2 Objetivos Específicos
Os objetivos específicos que levaram ao desenvolvimento da modelagem em elemen-tos finitos da asa do veículo não tripulado proposto neste trabalho são:
• Elaboração de um modelo computacional rápido e facilmente implementado paracalibração modal conservando a realidade estrutural
• Propor uma metodologia confiável para testes modais
• Contribuir para um modelo estrutural inicial para futuros cálculos de interação fluidoestrutura (aerodinâmica em asas flexíveis, flutter, divergência)
• Análise e comparação do modelo com a estrutura real construída, correlacionandoos custos e benefícios do método.

17
2 REVISÃO BIBLIOGRÁFICA
A revisão bibliográfica,neste trabalho, apresenta as pesquisas científicas relevantessobre os estudos de modelagem dinâmica estrutural e testes experimentais em estruturasaeronáuticas para o melhor conhecimento das técnicas atuais empregadas no âmbitoacadêmico e profissional.
2.1 Análise computacional dinâmica estrutural e validaçao em estruturas aeronáuticas
A modelagem computacional de estruturas aeronáuticas, por serem estruturascomplexas, é acompanhada por validações experimentais de teste em solo. A abordagemcientífica contida na literatura mostra diferentes tipos de instrumentação e modelagempara esses componentes. Os testes mais comuns consistem na fixação da estrutura porsuportes rígidos pontuais ou sua suspensão por molas e hastes flexíveis como a análise deuma asa voadora flexível (Gupta, 2016), modelo real de uma aeronave (Fernandes, 2016),e a asa de um aeromodelo (Diaz, 2011).
Com o auxílio do laboratório de estruturas da EEUPM, Alberto (2011) investigouatravés de testes experimentais e modelagem a influência do acoplamento de motores nosmodos de vibração e nas frequências naturais de uma asa reta, destinada à competiçãoAerodesign. A modelagem foi auxiliada por um software comercial Ansys, que discretizoua asa para a análise numérica em elementos finitos. O teste prático consistiu na excitaçãoda estrutura com um motor desbalanceado posicionado na asa e na leitura das aceleraçõesdas respostas. A frequência foi definida pela rotação necessária para o voo de cruzeiroda aeronave. Os resultados teóricos e práticos convergiram para valores próximos. De-monstrando que para excitações com maiores amplitudes a leitura dos acelerômetros e amodelagem são satisfatórias.
Sahin (2010) aborda a modelagem por outra perspectiva. A combinação de ele-mentos de cascas para a modelagem dos perfis e entelagem em conjunto com elementosde vigas para as longarinas, traduz em melhores resultados para o modelo da asa emelementos finitos no ponto de vista da quantidade de modos identificados. Para as primei-ras frequências de torção e flexão, o máximo erro apresentado foi de 5% de acordo comos testes experimentais. Porém, a dificuldade apresentada é que o teste utiliza um altonúmero de acelerômetros e um shaker modal encarecendo financeiramente o teste.
O estudo dos fenômenos dinâmicos como flutter, cargas dinâmicas, e ressonâncianecessita de modelos simples que auxiliam ao engenheiro na tomada de decisões em fasepreliminar conceitual. Soares (2004) analisa o fenômeno do flutter em fase de projeto con-ceitual para uma aeronave completa. Elementos de viga com massas concentradas simulamos elementos estruturais e não estruturais (peso do piloto, combustível e propulsores) como acoplamento das forças aerodinâmicas simuladas pelo método dos painéis. Os principais

18
ajustes propostos nesse modelo são as identificações experimentais para valores inercias ede rigidez do sistema proporcionando a melhor discretização do problema.
O processamento de sinais contribui positivamente na identificação dos parâmetrosmodais. Testes experimentais contêm diversas frequências captadas pelos acelerômetros.A filtragem desses sinais separa as frequências de interesse das que nada contribuem parao modelo proposto, estudos como Sczibor (2002)e Salehi (2007) abordam essa temáticacom maior profundidade.

19
3 FUNDAMENTAÇÃO TEÓRICA
3.1 Conceitos Básicos
O termo dinâmica pode ser definido como variação no tempo, portanto cargasdinâmicas são distinguidas das estáticas por possuírem magnitude ou direção variante notempo.(Barbosa,2016)
As respostas estruturais a cargas dinâmicas são abordadas por duas vertentes nafigura 4: análise determinística e não determinística. Quando há o conhecimento dafunção que rege a magnitude da excitação (força ou deslocamento) em qualquer momento,denomina-se a carga como determinística. Porém, em certas situações não determinísticas,o valor da excitação não é predominantemente conhecido em um determinado instante.Nesses casos, as análises estatísticas exibem uma padronização dos registros de excita-ção inferindo nas estimativas de médias, valores quadráticos de excitação. Velocidadedo vento, rugosidade da estrada e o movimento do solo apresentam essas característi-cas.(Clough,2003;Rao,2017)
Figura 4 – Cargas Determínisticas e Não Determínistricas
Fonte: Rao (2017)
3.2 Sistemas de um grau de liberdade
Massa, propriedades elásticas, e o amortecimento compõem parte essencial de umsistema estrutural sujeito a uma fonte externa de uma carga dinâmica excitadora. Aequação do movimento de um sistema como mostrado na figura 5 é modelado de acordocom o princípio de d’Alembert que equipara a variação da quantidade de movimentoangular de uma massa m a força atuante nela,
fI (t) + fd (t) + fs (t) = p (t) (3.1)
onde as forças fI , fD e fe são, respectivamente, a força inercial, força de amortecimento ea força elástica.

20
Figura 5 – Sistema dinâmico composto por massa, mola e amortecedor para um grau de liberdade:(a) componentes atuantes no sistema, sendo k a constante de rigidez da mola, c aconstante de amortecimento viscoso; e m a massa total do sistema; x (t) o deslocamentodinâmico e p (t) a força atuante no sistema; (b) forças atuantes no bloco
Fonte: Clough (2003)
Com as substituições dos valores pelos seus respectivos produtos, a equação (3.2) égerada:
mdx2
dt(t) + c
dx
dt(t) + kx(t) = p(t) (3.2)
3.3 Vibração Livre com amortecimento viscoso
A vibração do sistema é livre, ou homogênea, se o termo p(t) da equação (3.3) éigual a zero para todo instante de tempo t.
mdx2
dt(t) + c
dx
dt(t) + kx(t) = 0 (3.3)
A solução da equação (3.4) toma a forma de uma exponencial, podendo ser escritacomo:
(ms2 + cs+ k)Best = 0 (3.4)
Como est 6= 0, a solução não trivial para o problema é satisfeita apenas quando ooutro fator é igual a zero:
(ms2 + cs+ k) = 0 (3.5)
Logo, as raízes da equação característica serão dadas por:
s1,2 = ξωn ±√
(ξωn)2 − (ωn)2 = %± jωd (3.6)

21
% = ξωn é o fator de amortecimento;
ωn =√
km
é a frequência natural;
ξ = ccc
é a taxa de amortecimento;
cc = 2mωn é o amortecimento crítico;
ωd = ωn
√1− ξ2 é a frequência natural amortecida.
O principal ponto de reflexão sobre as constantes originadas pela equação (3.6) é arelação entre razão de amortecimento e a frequência natural. Rao (2017) a classifica detrês formas: amortecimento subamortecido, crítico e supercrítico. Respectivamente, figura6, essas condições serão estabelecidas quando ξ < 1, ξ = 1 e ξ>1.
Figura 6 – Diversos tipos de amortecimentos
Fonte: Rao (2017)
3.4 Sistemas com múltiplos graus de liberdade
A forma geral das equações governantes do movimento linear de N graus deliberdade é descrita de acordo com os sistemas das coordenadas generalizadas x1, x2, .., xn
na forma:
Mx (t) + Cx (t) + Kx(t) = P(t) (3.7)
sendo M, C e K são as matrizes respectivas de massa e inércia, amortecimento e arigidez; P é o vetor de forças externas atuantes.
3.5 Determinação das frequências naturais e modos de vibração
Para os casos de sistemas não amortecidos (C=0) e vibração livre (P = 0), osistema então é enunciado
[K− ω2M][Xj] = 0 (3.8)

22
Com j = 1, 2, .., n. Rearranjando a equação (3.8) em função de uma matrizsimétrica A e os autovalores λ. Chega-se a seguinte equação:
[A][X] = λ[X] (3.9)
Para a solução da equação (3.9) ser não trivial, a condição em que o det [K−ω2M]= 0 deve ser respeitada. Com isso, as frequências naturais do sistema ωj, j = 1, 2, ..., n, tais como seus autovalores λj = ω2
j , serão obtidas. Quando o sistema vibra a umafrequência natural correspondente, haverá a associação dessas frequências com os vetoresXj, formando a matriz modal, assim esta é dada por:
[φ] = [X1, X2, ..., Xn] (3.10)
3.6 Deformação de uma viga mediante a carga transversal
Segundo Hibbeler (2009) a equação diferencial linear de segunda ordem que governaos deslocamentos transversais y é representada por:
∂2y
∂x2 = M(x)EI
(3.11)
onde M(x), E, I, representam, respectivamente, o momento fletor, o módulo deelasticidade de Young e o momento de inércia de área. O produto do módulo deelasticidade E pelo seu momento de inércia de área I é conhecido como rigidez à flexão.
A viga engastada-livre AB, figura 7, com área de seção constante tem as restrições:
• Em x=0, y=0.
• Em x=L, ∂y∂x
= 0
Figura 7 – Deformações da viga engastada-livre com carregamento pontual
Fonte: Hibbeler (2009)
O momento fletor resultante da força constante P na extremidade da viga é:
M = −Px (3.12)

23
Substituindo (3.12) em (3.11), restringindo às condições de contorno e integrando(3.11) nos limites de x para 0 a L, a flecha em A será:
y = PL3
3EI (3.13)
3.7 Torção de barras uniformes
Hibbeler (2009) descreve a equação (3.14) que correlaciona a proporcionalidadeentre o ângulo de torção φ e o momento T aplicado como ilustrado na figura 8.
Figura 8 – Eixo submetido a um torque constante
Fonte: Hibbeler (2009)
O ângulo será expressado em radianos como:
φ = TL
GJ(3.14)
onde, L é o comprimento do cilindro, J é o momento polar de inercial da seçãoconstante ao longo do eixo e G é o módulo de elasticidade transversal.O produto domódulo de elasticidade transversal G pelo seu momento polar de inércia J é conhecidocomo rigidez torcional.
3.8 Momentos de inércia de massa
A semelhança na formulação e em certos teoremas, confundem a definição entre osmomentos de inércia de área e massa. Conforme Hibeller (2005), o momento de inércia demassa mede a capacidade do corpo em rotação a resistir a uma mudança em sua velocidadede giro, ao contrário do momento de inércia de área que é uma propriedade de seção cujafunção é quantificar a resistência do corpo a deformação.
Considerando um corpo rígido, conforme ilustrado na figura 9, o momento deinércia de massa para um elemento de massa dm será definido como o produto da suamassa pelo quadrado da distância.

24
Figura 9 – Elemento tridimensional de massa dm.
Fonte: Hibbeler (2005)
O momento de inércia de massa não é uma quantidade única, ele varia em funçãodos eixos de rotação. Segundo Hibeller(2005), os momentos principais de inércia de massapara os eixos x, y e z serão sempre positivos de acordo com as equações (3.15), (3.16) e(3.17).
Ixx =∫ m
0(y2 + z2)dm (3.15)
Iyy =∫ m
0(x2 + z2)dm (3.16)
Izz =∫ m
0(x2 + y2)dm (3.17)
A anti-simetria da distribuição de massa de um corpo em relação a um par de eixose ao seu centroide é a representação física do produto de inércia.Os elementos Ixy, Ixz eIyz são chamados de produtos de massa de inércia representados, respectivamente, por:
Ixy = Iyx =∫ m
0(xy)dm (3.18)
Iyz = Izy =∫ m
0(yz)dm (3.19)
Ixz = Izx =∫ m
0(xz)dm (3.20)
Em geral, o momento de inércia é dado no ponto espacial do centro de gravidadedo corpo na unidade SI em kg ∗m2. Porém, nem todos os corpos são rotacionados nesseponto. A asa, por exemplo, possui a sua rotação em relação ao seu centro elástico.Paraesses casos, utiliza-se então o teorema dos eixos paralelos que, segundo Hibeller(2005),serve para movimentar o momento de inércia de um corpo em seu centro de massa para

25
um ponto de eixo arbitrário definido. Com G’ tendo coordenadas xg, yg e zg, figura (10),os momentos em relação a esse ponto será dado por:
Ixx = (Ix′x′)G′ +m(y2g + z2
g) (3.21)
Iyy = (Iy′y′)G′ +m(x2g + z2
g) (3.22)
Izz = (Iz′z′)G′ +m(x2g + y2
g) (3.23)
Figura 10 – Sistema de eixos adotados para o cálculo dos momentos de inércia.
Fonte: Hibbeler (2005)
Similarmente, para os produtos de inércia o teorema dos eixos paralelos tambémserá válido. Os momentos em relação ao ponto G’ serão dados por:
Ix′y′ = (Ix′y′)G′ +m(xgyg) (3.24)
Iy′z′ = (Iy′z′)G′ +m(ygzg) (3.25)
Iz′x′ = (Iz′x′)G′ +m(zgxg) (3.26)
Com isso, pode-se caracterizar as propriedades inerciais de um corpo para umadada origem e orientação dos eixos. Esse arranjo é feito através de um tensor de inércia,sendo esse descrito pela equação (3.27).
AI =
Ixx −Ixy −Ixz
−Iyx Iyy −Iyz
−Izx −Izy Izz
; (3.27)

26
3.9 Método dos elementos finitos
O método dos elementos finitos consiste na discretização do meio contínuo (estru-tura) em um número finito de divisões chamados de nós. O comportamento da estruturaé representado por matrizes de massa e rigidez de cada elemento com as quais é possívelse formar as matrizes globais.(Zeinkiwicz,2000; Bathe,1996). A sua flexibilidade, conformedescrito por Segerlind (1984), é explorada para objetos com geometrias irregulares contendoinúmeros materiais com propriedades e condições de contorno variadas. Os métodos doselementos finitos são amplamente utilizados em cálculos dinâmicos de estruturas aeronáu-ticas. As modelagens típicas em asa de aeronaves em muitos casos empregam elementosde vigas,figura 11, com conhecidas propriedades de flexão, torção, axial e cisalhamento ouo modelo completo da estrutura com elementos de casca e vigas. A variação da rigidezflexional e torcional de cada viga é estimado de acordo com o métodos experimentais deanálise estrutural. (Wright, 2015)
Figura 11 – Representação da modelagem em vigas com cargas distribuídas ao longo da asa(Beam-like)
Fonte: Wright(2015)
Megson (1999) transcreve a estrutura da asa composta por longarinas primárias esecundárias, perfis, nervuras e revestimento externo caracterizando a como semi-monocoqueou monocoque. Por propósitos de fabricação, materiais compósitos, termoplásticos elaminados compõem partes dessas estruturas. Portanto, o erro acarretado pela modelagemdessas estruturas apenas por elementos de vigas será proibitivo para asas com razãode proporção entre a sua corda e o seu comprimento. Para a modelagem em que ocomprimento da corda é similar ao da envergadura, associa-se a combinação de elementosde placas e vigas como mostrado na figura 12.

27
Figura 12 – Asa discretizada em elementos finitos por cascas e vigas (Box-Like)
Fonte: Wright (2015)
3.10 Formulação dos elementos de viga
O elemento de viga segundo a teoria de Euler-Bernoulli formula as equaçõescontendo deslocamentos e rotações como variáveis nodais principais.O elemento de vigapossui em sua formulação dois graus de liberdade em cada extremidade, um deslocamentoe uma rotação,conforme ilustrado na figura 13.O campo de deslocamentos é definido parapequenos deslocamentos verticais do eixo.
Figura 13 – Elemento de viga com dois nós
Fonte: Wright (2015)
Assumindo que a rigidez flexional e a massa distribuída são constantes para todosos elementos. As matrizes locais de rigidez e massa para esse elemento terá dimensões 4x4e serão representadas por:
m = µLe
420
156 22Le 54 −13Le
22Le 4L2e 13Le −3L2
e
54 13Le 156 −22Le
−13Le −3L2e −22Le 4L2
e
; (3.28)
k = EI
L3e
12 6Le −12 6Le
6Le 4L2e −6Le 2L2
e
−12 −6Le 12 −6Le
6Le 2L2e −6Le 4L2
e
; (3.29)

28
A matriz diagonal que considera a massa concentrada, desprezando os efeitosrotacionais de inercia, em cada nó do elemento é igual a:
ml = µLe
2
1 0 0 00 0 0 00 0 1 00 0 0 0
; (3.30)
As matrizes globais Me e Ke dadas em (3.31) e (3.32) são construídas através doassembling das matrizes locais de cada elemento definidas em (3.28) e (3.29).
Ke =j∑
i=1ΓT
j kjΓj (3.31)
Me =j∑
i=1ΓT
j mjΓj (3.32)
Pode-se observar que Γj é a matriz de acoplamento ,que relaciona a contribuição decada grau de liberdade elementar com a estrutura, onde j=1,2,..,n é o número do elemento.
3.11 Formulação dos elementos de torção
Um elemento torcional típico com dois pontos nodais, figura 14, com a torçãovariando linearmente ao longo do eixo. As funções de interpolação, e a formação dasmatrizes de massa e rigidez serão similares a metodologia empregada na seção (3.10).
Figura 14 – Elemento torcional de cilindros
Fonte: Wright (2015)
Logo, as matrizes de massa e rigidez locais serão:
mt = χLe
6
2 11 2
(3.33)
kt = GJ
Le
1 −1−1 1
(3.34)
Assim como a massa representa a inércia do sistema em relação ao movimentolinear, o momento de inércia de massa representará a mesma ideia para o movimento

29
angular. Nos elementos de torção aparecerá a constante χ que será o momento de inérciade massa distribuido com a unidade em SI de kg*m.

30
4 ANÁLISE EXPERIMENTAL
O teste de vibração em solo ou GVT, também denominado de teste modal, éutilizado em protótipos aeronáuticos para estimar as frequências naturais, as formasmodais e as taxas de amortecimento de estruturas locais (asas, fuselagens, profundores)ou completas (avião). Os dados experimentais obtidos servem para validar, ou ajustar, osmodos calculados por modelos teóricos (Ewins,2000).
A típica configuração de um ensaio GVT (figura 15) é formada por elementosbásicos da eletrônica possuindo assim uma fonte excitadora de entrada, um transdutoranalógico ou digital para converter os dados mecânicos em sinais elétricos, e um sistemapara processar e analisar os sinais digitalizados.
Figura 15 – Configuração típica para instrumentação de análise modal
Fonte: Ewins (2000)
A confiabilidade dos dados adquiridos em testes laboratoriais de vibração necessitade maior atenção para certos aspectos práticos, requerendo assim elementos de hardwarebásico e controle das condições de contorno. Segundo Ewins (2000), os elementos sãocategorizados nas seguintes vertentes:
• aspectos mecânicos do suporte que simulam as condições de contorno e a definiçãoda fonte excitação da estrutura;
• a quantidade e o tipo de transdutores necessários para medir a resposta de saída daestrutura;
• o processamento de sinais.

31
4.1 Suporte Mecânico e Força de Excitação
O primeiro ponto é o controle dos tipos de suportes mecânicos da estrutura e aforça de excitação de entrada. As condições usuais nos quais é feito o teste GVT são: acondição livre-livre e engaste fixado ao solo. A condição livre-livre, figura 16, suspendea estrutura espacialmente significando que nenhum nó será fixado. Porém, a práticademonstra que essa condição é teórica, pois a estrutura precisa ser alçada de algum modo.Segundo Bisplinghoff (2002) ensaios desse gênero suportam a estrutura aeronáutica pormolas e cabos de baixa rigidez estrutural (air bags,pneus), resultando na disposição dosmodos de vibração de corpo rígido em que há apenas a consideração dos movimentos detranslação e as matrizes de rigidez e massa. Em contrapartida, o engaste fixado ao solotrava os pontos nodais da estrutura em uma base ou fundação suficiente rígida.
Questões práticas permeiam a definição sobre o formato da condição de suporteideal para o teste laboratorial. O fator determinante é o equilíbrio entre o modelo propostoe a sua condição prática real. Mesmo que haja a dificuldade de obter uma fundaçãosuficientemente rígida, os modos de vibração para uma semi-asa se aproximam mais deestruturas engatadas com a extremidade livre, que apresentam sua raiz fixada somente emumas das extremidades, figura 17, do que uma estrutura livre sem engastes.
Figura 16 – Condição livre-livre para um avião em escala
Fonte: Wright (2015)

32
Figura 17 – Asa suportada na base com excitação senoidal
Fonte:Alberto (2014)
Os mecanismos mais usuais de excitação são shakers eletrodinâmicos e forças deentrada transientes como as dos martelos de impacto. Os shakers eletrodinâmicos sãoatuadores capazes de criar diversas forças excitadoras, reproduzindo com fidelidade sinaisrandômicos, senoidais e exponenciais. Portanto, a capacidade de interpretar diferentessinais criados pelos trandusturoes e a resposta usual da estrutura, compõe uma habilidadeprimordial para o engenheiro de vibrações consciente das necessidades do projeto.
Nesse sentido, os martelos de impacto configuram-se por serem dispositivos maissimples de excitação devido a força de entrada ser reproduzida por uma função impulso.A figura 18 demostra dois gráficos: o primeiro é a representação no domínio do tempode um impacto criado pelo contanto entre o martelo de impacto e a estrutura, que teráuma resposta habitual. Note que a força é exercida por um pequeno intervalo de tempocessando rapidamente. A respota estrutural, após o contato do martelo, será amortecidaaté que as amplitudes das vibrações sejam nulas ou irrisórias.
Figura 18 – Resposta estrutural a um teste de impacto
Fonte: Avitabile (2018)

33
A gestão eficiente dos instrumentos de um laboratório é determinante no gerencia-mento dos ensaios. Diretrizes como custos, simplicidade e eficência conduzem o engenheirona busca pelo seu objetivo prático. O investimento na instrumentação para ensaios nãopodem ser isolados, devem ser focalizados como intermediação para alcançar o objetivo.Então, em muitos casos, a aquisição de um martelo de impacto, que custa por volta deR$4.000,00, não é primordial para projetos isolados até pelo cenário atual de crise noBrasil em que cortes de custos afetam diretamente o ensino nas universidades federais.O desafio então é buscar métodos alternativos mais baratos compatíveis com modelostradicionalmente consolidados, porém que sejam viáveis do ponto de vista econômico.
Uma alternativa a testes de impacto instrumentados sugerida pelos autores (Ewinset al, 2000;Avitabile, 2018) é referida como impulso relaxado ou queda impulsiva. A cargaestática é aplicada sobre uma estrutura por cabos de aço tensionados ou elevação daestrutura com deslocamentos conhecidos e, similar a um impulso, removida rapidamentepara que a estrutura vibre naturalmente. O que é vantajoso, ou benéfico, por um lado,resultam em limitações por outro. A principal desvantagem, inicial, desse método é adiminuida exatidão do mensuramento da magnitude da força. Porém, esse limitante écontornado pela padronização das deflexões constantes e iguais para todos os ensaios. Afigura 19 ilustra um modelo de um prédio tensionado por cabos, que após a retirada datensão, apresenta um sinal de um amortecimento supercrítico para a sua deflexão emfunção do tempo conforme a segunda ilustração da mesma figura.
Figura 19 – Ensaios de estruturas civis com tensionamento de cabos
Fonte: Ewins (2000)

34
4.2 Acelerômetros
Transdutores de aceleração (acelerômetros) são dispositivos capazes de medir ainércia de um sistema, mais especificamente a taxa de variação da velocidade em relaçãoao tempo, denominada aceleração. Basicamente, estes dispositivos convertem a energiamecânica proveniente do sistema em voltagem elétrica de saída. No sistema internacional(SI) sua unidade é m
s2 .
O transdutor piezelétrico, figura 20, é constituído por um cristal piezelétrico,mola e massa interna. Nesses sensores, a ocorrência de uma excitação devido a umaaceleração externa impõe uma força no elemento de cristal que a converte em sinaiselétricos. (Levinzon, 2015). Aviação, automotivo, monitoramento estrutural, isolamentosísmico, medições de terremotos compõem apenas uma fração da ampla gama do empregodeste transdutor que, atualmente, é o mais utilizado nos ensaios de vibração. (Merhav,1996)
Figura 20 – O sensor IEPE fornece sinais elétricos proporcionais a força aplicada
Fonte: Levinzon (2015)
Acelerômetros Piezelétricos com eletrônica embarcada representam a classe avan-çada de sensores de vibrações dinâmicas que incorporam a integração de um transdutorpiezelétrico constituído por uma parte mecânica, e a eletrônica embarcada. O circuitointegrado compreende um amplificador de carga ou tensão incorporado que converte osinal de carga do transdutor para o sinal de saída de tensão. O amplificador transforma aalta impedância do dispositivo em baixa impedância permitindo a transmissão do sinal detensão em longos comprimentos de cabo. O sinal analógico então é conduzido por caboscoaxiais para um condicionador de sinais e, posteriormente, convertidos em sinais digitais.(Levinzon, 2015)
A seleção adequada do cabos e conectores dos acelerômetros piezelétricos é essencialna confiabilidade dos dados coletados. De modo geral, os cabos coaxiais duplos dividem

35
as funções individualmente : a condução do sinal e a alimentação, e o retorno do sinal.Sensores IEPE por terem uma qualidade na transmição dos sinais independente docomprimento do cabo, diminuem os aparatos técnicos necessários. Restando, apenas, ocuidado com as fixações dos cabos adequadamente evitando os efeitos triboelétricos. Afigura 21 ilustra a montagem incorreta do cabeamento, pois os cabos soltos podem torcerou colidir com o chão acarretando em erros nas frequências amostradas. A solução é fixaros cabos a estrutura com o auxílio de fitas.(Palmeira, 2007)
Figura 21 – Disposição correta dos cabos
Fonte: Palmeira (2007)
A montagem do acelerômetro é determinante na aquisição correta dos dados. Alémdisso, os erros induzidos nas medidas dispõem diretamente na criação de frequências falsasque não estão associadas à estrutura.A figura 22 compara a frequência de ressonância paracada tipo de montagem.
Figura 22 – Comparação com o shaft de frequência mediante a troca da fixação
Fonte: Girdhar (2004)

36
Existem quatro tipos de fixação dos acelerômetros na estrutura: permanente,adesivado ou colado, desmontagem rápida e magnético. O acelerômetro fixo permanenteé o que traduz a melhor performance em termos de frequência de resposta. Porém, ocusto envolvido ao fixar acelerômetro em posições necessárias para a aquisição, se tornaimpraticável para ensaios multipontos. O método de colocação por adesivos confere umasegurança sem a dispensação de grandes recursos técnicos, embora a frequência de aquisiçãoe acurácia sejam diminuídas.
Figura 23 – Tipos de Fixação
Fonte: Gindar (2004)
4.2.1 Especificações dos Acelerômetros
Cada acelerômetro é apropriado certos tipos de ensaios dependentes das suasconfigurações. Nesta seção será abordado os aspectos técnicos.
4.2.1.1 Amplitude da vibração
É a amplitude máxima e mínima que o acelerômetro medirá antes de distorcer ouatenuar o sinal. Seu alcance é geralmente expresso por g que na unidade SI representa9.81 m
s2 .
4.2.1.2 Frequência de Ressonância
A frequência de ressonância do acelerômetro determina o limite da linearidadeentre a medição de saída e a entrada, espera-se que a frequência do ensaio esteja nessascondições evitando a ressonância mecânica do transdutor para altas frequências. As baixasfrequências representam uma resposta não-linear devido aos circuitos eletrônicos.
4.2.1.3 Sensibilidade
A sensibilidade de um acelerômetro é a razão entre a tensão de saída pela forçamecânica de entrada. Os seus valores se enquadram em três categorias dependendo do seutipo: mv/g, pC/g ou LSB/g. Cabendo a amplitude determinar a sensibilidade adequada

37
em questão. Enquanto baixas amplitudes de respostas demanda um acelerômetro commaior sensibilidade, as medições de altas amplitudes se caracterizam inversamente.
4.2.1.4 Número de Eixos
Acelerômetros comerciais estão na forma uniaxial (apenas um eixo) e tri-axiais. Aprincipal diferença experimental é a diminuição da quantidade de ensaios por experimentos.Porém, do ponto de vista comercial, acelerômetros tri-axiais exigem um investimentofinanceiro maior.
4.2.1.5 Peso
Medidas de acelerações são altamente influenciadas pelo peso do dispositivo.Aconselha-se que o peso do mesmo não ultrapasse 5 a 10 por cento do peso da estrutura teste.
4.2.1.6 Ruído
Ruído são sinais aleatórios no sistema que induzem a medições errôneas seja nafrequência ou na amplitude de vibração. Segundo Levinzon (2015), os ruídos predominantessão gerados pelos acelerômetros em comparação aos amplificadores. As especificaçõestécnicas do fabricante relatam os dados em mV/sqrt(Hz) ou mV/sqrt(Hz).

38
4.3 Processamento de Sinais
A representação dos sinais de vibração de um sistema é feita em dois domínios:tempo e frequência. O domínio do tempo é a representação das amplitudes amostradas pelotempo. Por outro lado, o domínio da frequência sequencia o sinal na forma de somatóriosde senos e cossenos. A comparação é melhor visualizada na figura 24.
Figura 24 – Representação do sinal em diferentes domínios
Fonte:Smith (2002)
4.3.1 Amostragem
A reconstrução perfeita de sinais analógicos (contínuos) em sinais discretos digitaisé intrinsicamente ligada a taxa de amostragem. Estudos com resultados relevantes na áreaforam feitos na década de 40 por Harry Nyquist e Claude Shannon, traduzindo os esforçosno teorema de amostragem de Nyquist. De acordo com o teorema, o sinal é reconstruído,sem perda de informação, caso o valor da frequência de amostragem fs seja pelo menosduas vezes maior que a máxima frequência B em Hz de interesse(figura 25).
fs > 2B (4.1)
O fenômeno ocasionado por senoides e cossenoides com frequência e fases alteradas durantea amostragem é denominado aliasing.

39
Figura 25 – Limite da perda de informação por aliasing em função da frequência normalizada
Fonte:Smith (2002)
4.3.2 Transformada Rápida de Fourier
Há infinitos meios da reconstrução dos sinais amostrados. As funções seno e cossenodecompõem o sinal original de forma mais fidedigna e compatível. A relação linear entreo sinal de entrada e saída produzirá uma senóide com a variação da amplitude e faseapenas, mantendo a frequência e a forma de onda iguais. A transformada de Fourier foidescoberta por um matemático e físico Francês chamado Jean Baptiste Joseph Fourier. Elaé marcada na história por contribuir com grande destaque no campo prático da matemáticae engenharia. A divisão da análise de Fourier é feita em quatro categorias: transformadade Fourier, séries de Fourier, transformada discreta no tempo de Fourier e transformadadiscreta de Fourier. A contribuição científica dos métodos é imensurável, porém o tamanhodo sinal amostrado é determinante na predominância do uso da transformada discreta deFourier em processamento de sinais não teóricos.(Smith, 2002)
A transformada discreta de fourier real decodifica um sinal temporal contendoN amostras para o domínio da frequência contendo partes reais e imaginárias paraN/2+1 amostras. Porém, há também a transformada discreta de Fourier complexadesde transformar o sinal temporal em N/2 +1 amostras, transforma diretamente em Namostras. A sintetização do domínio da frequência no temporal é válida para as operações,conforme ilustrado na figura 26. O custo computacional da transformada discreta defourier complexa se torna proibitivo para problemas práticos. Cooley e Tukey (1965)trouxeram um algoritmo para o cálculo dessa transformada, a transformada rápida defourier. Smith (2002) descreve a FFT como a operação da decomposição de N pontos nodomínio do tempo em N pontos no domínio da frequência. O primeiro passo do algoritmo

40
Figura 26 – Sinal contendo N amostras temporais convertido pela DFT no domínio da frequência
Fonte:Smith (2002)
é decompor N pontos amostrados em N sinais de 1 ponto cada, calculando o espectro defrequência para cada sinal e; por fim, sintetizando os N espectros em uma única frequência.A principla comparação entre os métodos é a relação entre o tempo de execução em que aDFT é proporcional a N2, enquanto a proporcionalidade da FFT é um produto de N porlog(N) além de maior precisão.
4.3.3 Condicionadores de Sinais
Os dispositivos condicionadores são responsáveis por amplificar os sinais de baixaintensidade, isolando e filtrando-os para adequação de interesse. A amplificação aumentaa resolução do sinal e reduz o ruído. O isolamento garante a blindagem das leituras deaquisição eliminando o curto de terra. Os filtros removem os sinais indesejados do sistema.Além disso, os filtros anti-aliasing também estão instalados nos condicionadores, sejaem software ou hardware. Por fim, os condicionadores permitem a medição de diversostransdutores utilizando um único equipamento. Os conversores A/D amostram um canale comutam o próximo, sendo que a taxa amostrada cai a medida do aumento do númerode sensores.
4.3.3.1 Conversores Analógico-digitais
Os sinais coletados por acelerômetros são por essência analógicos. O processamentodesses sinais demanda a sua conversão para valores digitais feito por microprocessadoresanalógico-digitais (A/D), quantificada por números binários ou bits. Conforme o aumento

41
da potência binária, o sinal será discretizado em maiores intervalos afetando positivamentea resolução.
42
5 MATERIAIS E MÉTODOS
A abordagem desta seção será a discussão sobre os matérias e métodos destetrabalho.
5.1 Materiais
5.1.1 Estrutura da meia asa
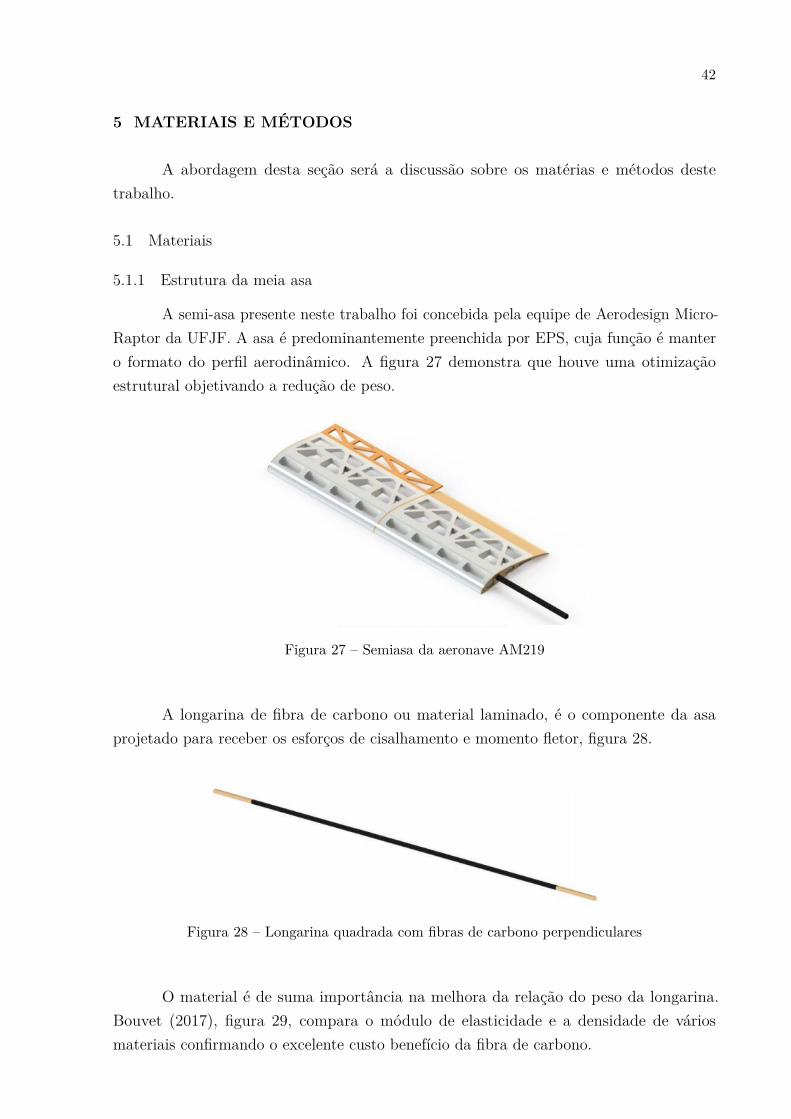
A semi-asa presente neste trabalho foi concebida pela equipe de Aerodesign Micro-Raptor da UFJF. A asa é predominantemente preenchida por EPS, cuja função é mantero formato do perfil aerodinâmico. A figura 27 demonstra que houve uma otimizaçãoestrutural objetivando a redução de peso.
Figura 27 – Semiasa da aeronave AM219
A longarina de fibra de carbono ou material laminado, é o componente da asaprojetado para receber os esforços de cisalhamento e momento fletor, figura 28.
Figura 28 – Longarina quadrada com fibras de carbono perpendiculares
O material é de suma importância na melhora da relação do peso da longarina.Bouvet (2017), figura 29, compara o módulo de elasticidade e a densidade de váriosmateriais confirmando o excelente custo benefício da fibra de carbono.

43
Figura 29 – Módulo de Young de acordo com a densidade
Fonte: Bouvet (2017)
A entelagem da asa da aeronave modela a geometria do perfil, ajudando naconservação do formato aerodinâmico da asa. Por ser um material termo retrátil, há anecessidade de um soprador para a troca de calor. Esse processo evita a formação de rugasna asa. A estrutura da asa é finalizada com a colocação nas suas extremidades das seçõesde EPS com compensado de caixeta de 2,5 mm, figura 30, para fixar melhor o encaixeentre as seções e aumentar a resistência torcional da estrutura de modo contínuo.
Figura 30 – Compensado de Caixeta

44
5.1.2 Propriedades Geométricas
A instrumentação da medição do peso se deu com um auxílio de uma balança,conforme demonstrado na figura 31.
Figura 31 – Peso dos componentes disponibilizado por balanças resistivas
As propriedades geométricas foram medidas com o auxílio de um paquímetro erégua. O peso da estrutura completa será a soma do peso da asa completa em conjuntocom a parcela da longarina que constitui no incremento da rigidez. Todos os dados estãodispostos na tabela 1.
Tabela 1 – Dimensões Geométricas da Asa
Elemento Grandeza Física Valor AbsolutoAsa Comprimento(m) 0.75
Corda(m) 0.24Peso(kg) 0.188
Longarina Comprimento(m) 0.75Peso(kg) 0.34
Estrutura Completa Peso Total (kg) 0.222
5.1.3 Sistema de Aquisição
O condicionador de sinais ADIS 1800, figura 32, é um modelo comercial pertencentea fabricante lynx. A arquitetura eletrônica é constituída por 10 canais com conversoresA/D individuais, 24 bits de resolução e frequência de amostragem de 24000 amostras/s.
A portabilidade e a versatilidade permitem conectar sensores em ponte, straingauges em 1
2 ,14 e ponte completa. A Alimentação AC para 90 a 240V é convertida por um
adaptador para uma tensão DC de 10 a 32V. Com isso, acelerômetros IEPE e ICP sãofacilmente integrados a esse hardware. Sendo, a comunicação com o microcomputadorestabelecida via ethernet (TCP/IP) com velocidade entre 10/100 Mbits/s ou via redeWi-Fi.

45
Figura 32 – Condicionar de sinais ADIS 1800
Fonte: LynxTech (2016)
5.1.4 Acelerômetros de Ensaio
O seu modelo é o DeltaTron Type 4507 B da fabricante Bruel-Kjaer. Esse tiporepresenta a classe dos acelerômetros Piezoelétricos com eletrônica embarcada (IEPE).O conjunto, representado pela figura 33, contém conector, pré-amplificador, o materialpiezelétrico e é soldado hermeticamente ao alojamento de titânio acarretando na blindagemdo instrumento.
Figura 33 – Comparação geométrica entre uma moeda e o acelerômetro em estudo
Fonte: Bruel & Kjaer (2016)
As suas medições são apenas em um eixo. A faixa de trabalho é limitada pelafrequência de 6000Hz do acelerômetro. Porém, abrange a frequência necessária para estesensaios. A alta sensibilidade (100mv/g), a leveza (4.8 gramas) e as dimensões físicasreduzidas o configura como um instrumento ideal para a análise modal em estruturas deengenharia civil, aeronáutica além de testes NVH.

46
5.2 Métodos
Nesta seção serão abordados os métodos utilizados no trabalho. Dentre esseconjunto, destaca-se o teste prático da estrutura aeronáutica que obtém os valores derigidez flexional e torcional da estrutura. Há também a elucidação do algoritmo.
5.2.1 Ensaio de rigidez da estrutura
Wright (2015) descreve o centro de cisalhamento como o ponto na seção do perfilem que ao aplicar uma força transversal a resposta da estrutura será apenas a suaflexão, resultando em uma taxa nula de torção. Em termos de projeto, a propriedade daasa (tridimensional) será de maior interesse em comparação a uma propriedade de área(bidimensional), portanto calcula-se o eixo elástico que será a união de todos os centrosde cisalhamento de cada seção da asa resultando numa função ao longo da envergadura.A importância dessa propriedade inercial é a permissão do desacoplamento entre asfrequências de torção e flexão.Embora, haja acoplamento entre a posição do centro demassa e o centro elástico.
Assumindo um caso simples de uma asa reta não enflexada com propriedadeshomogêneas ao longo da envergadura, o eixo elástico será encontrado com o auxílio dosoftware SolidWorks R© conforme demonstrado na figura 34.
Figura 34 – Características geométricas do perfil

47
De forma a determinar os dados de rigidez flexional para estrutura, foi realizadoum ensaio que consistia em colocar pesos de massa conhecida no ponto do eixo elástico naextremidade da asa e medir a sua deformação, conforme o esquema da figura 35.
Figura 35 – Ensaio esquemático para a determinação da rigidez
Para ensaio de rigidez torcional é necessário aplicar um momento torsor na pontada asa e medir a sua variação angular em função do eixo elástico, o teste prático é mostradona figura 36. A solução proposta foi a confecção de um protótipo em balsa MDF com asdimensões do perfil da asa em conjunto com uma haste de furos numerados e espaçamentosconhecidos. A colocação de anilhas com pesos conhecidos num furo determinado emrelação ao eixo elástico produz um momento torsor na ponta de asa, gerando assim umângulo de torção resultante.
Figura 36 – Dispositivo mecânico para aplicação de Torque do teste de rigidez torcional

48
Desses ensaios foram extraídos os dados conforme disposta na tabela 2.
Tabela 2 – Dados Experimentais teste de flexão
Força Peso(N) Deslocamento na Asa(m)5.80 0.0347.0 0.0419.0 0.053
Substituindo os valores da tabela 2 na equação (3.13) para um comprimento deasa de 0,75 m e com a média dos resultados, a rigidez flexional será 24 N/m.
Do ensaio de rigidez torcional foram extraídos os dados conforme disposta na tabela3.
Tabela 3 – Dados Experimentais teste de torção
Carga(Kg) Momento na Asa(N.m) Ângulo de torção (rad)0.100 0.0981 0.0040.300 0.1962 0.0080.430 0.2943 0.013
Substituindo os valores da tabela 3 na equação (3.14) para um comprimento deasa de 0,75 m e com a média dos resultados, a rigidez torcional será 17 Nm/rad.
5.3 Definição do momento de inércia de massa da asa
As propriedades para os momento de inércia da asa em CAD foram calculadoscom o auxílio do software SolidWorks R©. Após inserido o desenho completo de todos oscomponentes da asa , o primeiro passo é definir as coordenadas inerciais do sistema, paraisso será adotado o eixo que passa pelo centro elástico da estrutura de acordo com a figura37.
Figura 37 – Sistema de eixos adotados para o cálculo dos momentos de inércia.

49
O solidworks dispõe as propriedades de massa na forma de tensor Inercial, conformea figura 38. Sendo que os valores Ixx, Iyy e Izz são os momentos de inércia de massaem relação aos eixos x,y e z. O valor adotado para a simulação será o Izz devido a essaconstante representar a resistência inercial a rotação em relação ao eixo z.
Figura 38 – Propriedades de Inercia para a asa modelada no solidworks

50
5.3.1 Algoritmo de simulação
Inicialmente , as entradas do algoritmo desenvolvido na linguagem em Matlab R©,figura 39, serão originadas mediante os testes práticos de rigidez, pesagem da estrutura esimulação do momento de inércia conforme mostrado no capítulo 5 de materiais e métodos.
Figura 39 – Entradas do algoritmo em Matlab R©
Os elementos de vigas com torção e flexão como graus de liberdade serão escolhidospara a análise da asa. O desacoplamento entre as frequências de torção e flexão seráadotado para efeitos de simplificação.
O número de elementos é importante para a definição dos erros numéricos. Aconvergência do método aumenta a medida que mais elementos são adicionados; por outrolado, o custo computacional também, levando a modelos mais lentos. As entradas doalgoritmo além do número de elementos, também serão os números de nós, números denós por elemento e os graus liberdade por nó. A figura 40 relata as entradas no programa.
Figura 40 – Entradas do algoritmo para elementos de flexão
As condições de contorno possuem a informação espacial sobre as retrições daestrutura de acordo com o movimento da mesma. Para resolver as equações do problema,as condições de cada nó devem ser selecionadas. A convenção adotada neste trabalho será

51
0 para caso o grau de liberdade do nó esteja restrito e 1 caso esteja livre. Os graus deliberdade diferentes de zeros serão computados e somados para o cálculo da quantidadetotal da estrutura.
As matrizes globais de rigidez e massa terão dimensões quadradas de acordo com onúmero total de graus de liberdade.A montagem das matrizes locais de cada elemento eo assemble para toda a estrutura será feito de acordo com a metologia apresentada nasseções 3.9, 3.10 e 3.11.Um artíficio matemático utilizado para diminuir as dimensões dasmatrizes globais é o corte das linhas e colunas que contenham graus de liberdades restritosna estrutura.
Com as matrizes globais de rigidez e massa da estrutura calculadas, o próximopasso será a obtenção dos autovalores e autovetores originados pela resolução da equação(3.9). O Matlab R© disponibiliza uma função chamada eig() que faz o cálculo numéricodesses valores. A saída dos autovalores terão as suas unidades em rad
s, assim o valor será
convertido para Hz pela divisão por 2π.
Ao comparar os resultados experimentais e de simulação, espera-se que o modelomatemático proposto consiga representar o problema. Porém, existem numerosas possibili-dades da origem dos erros entre os valores medidos e simulados. Antes de relatar errosnas leituras das grandezas físicas erros que facilmente controlados, espera-se um via demaior segurança para identificá-los. Nesse contexto, a efeitos de comparação, um modeloteórico é proposto por Wright(2015) em que considera-se uma viga com engaste na base ea outra extremidade livre.
A primeira frequência de flexão teórica será calculadas por:
ωf = 3.52√EI
µL4 (5.1)
onde, EI é a rigidez flexional, µ é o peso distribuido e L o comprimento da viga.A frequência de torção por:
ωt = 1.51√GJ
χL2 (5.2)
onde, GJ é a rigidez torcional, χ é o momento de inércia de massa distribuido e Lo comprimento da viga.

52
6 ANÁLISES E RESULTADOS
6.1 Testes na Estrutura Real
Para o levantamento dos modos de vibrar e das frequências naturais foi realizadoum ensaio modal para a semi-asa da aeronave AM219 descrita na metodologia. A ideiaprincipal será a comparação dos dados reais com a simulação em elementos finitos.
As informações técnicas do condicionador de sinais e acelerômetros estão descritasna metodologia. Para este ensaio, a frequência de amostragem estabelecida será de 1000hz devido a limitação da frequência de gravação do ADIS1800.
Neste trabalho houve a divisão do teste GVT em três tipos de experimentos. Oprimeiro consiste num teste modal com o intuito de extrair as frequências naturais de flexãoda asa da aeronave AM-219 e comparar com os resultados obtidos através da simulação.Com esse objetivo, quatro acelerômetros foram colocados com uma fita dupla face sobre oeixo elástico da asa (figura 41) para extrair apenas as frequências de flexão desacopladasas de torção.
Figura 41 – Parâmetros operacionais do primeiro ensaio
O segundo experimento possui o objetivo de identificar as frequências laterais deflexão da asa. A posição dos acelerômetros será conservada, porém a direção da mediçãodos acelerômetros e força serão paralelas ao eixo da corda da asa. A figura 42 demonstrao ponto e o sentido da força de relaxamento.

53
Figura 42 – Parâmetros operacionais do segundo ensaio
O objetivo do último experimento, terceiro ensaio, apresentado na figura 43, édistinguir as frequências de flexão e torção da asa. Para isso, os quatros acelerômetrosforam colocados na porção da semi asa perto da extremidade livre com os sentidos deaceleração iguais ao do primeiro experimento.
Figura 43 – Parâmetros operacionais do terceiro ensaio
6.1.1 Resultados do teste
Os seguintes resultados foram obtidos para cada tipo de ensaio modal realizadopara a estrutura. Ao todo foram feitos 3 ensaios de cada tipo. As figuras 44,45 e 46relatam os sinais no domínio do tempo para cada um desses ensaios.

54
Figura 44 – Resposta temporal para o primeiro ensaio
Figura 45 – Resposta temporal para o segundo ensaio
Figura 46 – Resposta temporal para o terceiro ensaio
Depois de separar os sinais, eliminar os ruídos e filtrá-los com o auxílio do softwareMatlab R©, foram adicionados zeros ao final do vetor amplitude de cada ensaio. Issopossibilita que a FFT produza um espectro de frequência com maior número de amostras,

55
a consequência será a melhor resolução em frequência.
Devido ao sinal pouco padrozinado no domínio temporal, a análise será feita nodomínio da frequência. Na análise espectral, o objetivo é determinar as frequências e fasescontidas em um sinal. As transformadas rápidas de fourier converterão os sinais paraesse domínio. Com as FFT calculadas para o sinais processados, será tirada a média dosresultados para cada ensaio como ilustrado na figura 47.
Figura 47 – Espectros de frequência com a média de todos os ensaios
Claramente, percebe-se a presença de picos em frequência que variam de 8.8 a 23.3Hz. A diferenciação das frequências naturais de flexão e torção será feita pela plotagemdos modos de vibração da asa.O Sistema de eixos de coordenadas será o mesmo tomadoda seção 5.3.

56
Figura 48 – Modo experimental para a primeira frequência
Figura 49 – Modo experimental para a segunda frequência
Para a melhor visualização dos modos, os valores obtidos pelo teste experimental
57
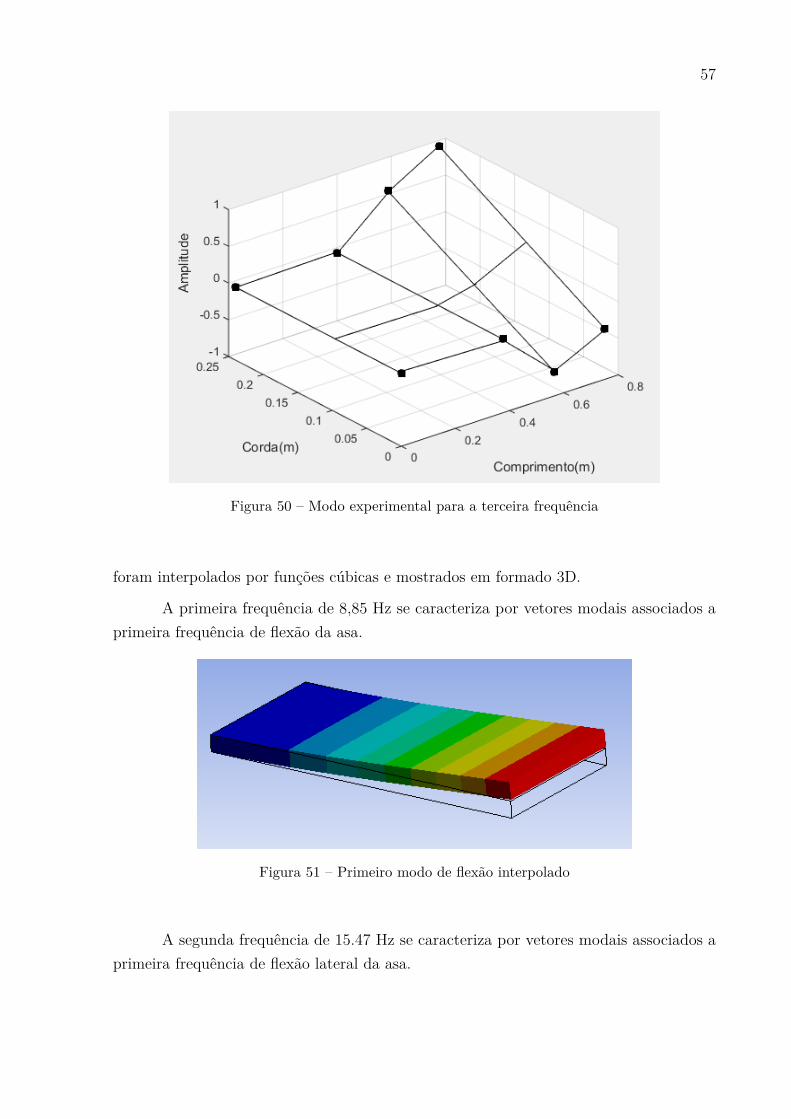
Figura 50 – Modo experimental para a terceira frequência
foram interpolados por funções cúbicas e mostrados em formado 3D.
A primeira frequência de 8,85 Hz se caracteriza por vetores modais associados aprimeira frequência de flexão da asa.
Figura 51 – Primeiro modo de flexão interpolado
A segunda frequência de 15.47 Hz se caracteriza por vetores modais associados aprimeira frequência de flexão lateral da asa.

58
Figura 52 – Primeiro modo de flexão lateral interpolado
A terceira frequência de 23.3 Hz se caracteriza por vetores modais associados aprimeira frequência de torção da asa.
Figura 53 – Primeiro modo de torção interpolado

59
6.1.2 Comparação com o modelo numérico
O passo inicial foi inserção das propriedades de massa (inércia e massa) e geométricas(rigidez flexional e torcional) no algoritmo.Além disso, os modelos teórico e simulado foramsimplificados ao adotar propriedades de seções, inércia e rigidez equivalentemente constantesao longo da envergadura da asa.
O primeiro teste feito no algoritmo consistiu na escolha do número de elementosem que erros numéricos entre o modelo simulado e o teórico, calculado de acordo comas equações 5.1 e 5.2, sejam minimizados.As figuras 54 e 55 mostram a comparação dosmétodos para as primeiras frequências de flexão e torção.
Figura 54 – Primeiro modo de flexão do algoritmo
Figura 55 – Primeiro modo de flexão do algoritmo

60
Percebe-se que a modelagem das matrizes de massa como consistentes convergirampara o valor teórico com menor quantidade quando comparado com o modelo de massasconcentradas para os elementos de flexão, obtendo erros irrisórios a partir de 30 elementos.Por outro lado, os elementos de torção convergem para um valor constante com poucoselementos mantendo um erro constante (4%) a medida que os elementos são acrescidos.
Definido os erros numéricos de convergência, o algoritmo foi iniciado com 30elementos de viga e torção, fixando os graus de liberdade dos primeiros nós do primeiroelemento, simulando assim a condição de engaste. Os resultados foram disponibilizadosnas tabelas 4 e 5.
Tabela 4 – Comparação da simulação numérica com valores teóricos
Modo Freq. Teórica (Hz) Freq. Simulada (Hz) Erro(%)1o Modo de Flexão 8.96 8.96 01o Modo de Torção 24.80 25.82 4
Tabela 5 – Validação da simulação numérica
Modo Freq. Experimental (Hz) Freq. Simulada (Hz) Erro(%)1o Modo de Flexão 8.85 8.96 1.21o Modo de Torção 23.3 25.82 9.8
Os máximos erros encontrados entre o experimental e o númerico estão na faixa de10%. A origem podem ser explicada pelos os erros da simulação dos elementos torcional,os efeitos gerados pela massa dos acelerômetros e dos fios, assim como erros numéricosrelativos ao cálculo do momento de inércia.
Com o modelo calibrado, os modos de vibração para as primeiras frequência detorção e flexão foram plotados conforme as figuras 56 e 57. As amplitudes são relativasaos deslocamentos modais. Isso é feito tornando os autovetores associados a primeirafrequência unitários em relação ao seu máximo valor.

61
Figura 56 – Primeiro modo de flexão do algoritmo
Figura 57 – Primeiro modo de torção do algoritmo
62
6.2 Conclusões
A gestão de projetos e demandas ainda é um desafio para os engenheiros detodas as áreas. As mudanças no projeto conceitual acontecem numa escala e velocidadeimpressionantes. O modelo computacional deve representar com certa fidelidade osfenômenos de importância, entrentando deve possuir as variáveis do problema controladascorretamente para o entendimento do processo real mais simplificado. De nada adiantater um modelo computacional exato, se o mesmo for mais complexo que o fenômeno emestudo, pouco adaptável e lento para a solução dos casos.
O modelo em MEF com as simplificações adotadas apresentado neste trabalhoreproduz com certa exatidão o comportamento dinâmico da asa em estudo. A comparaçãodos erros correlacionados entre as primeiras frequências naturais do modelo simulado eexperimental apresentaram erros aproximados de 10%, padrões baixos para uma asa quecontém diversões tipos de materiais, seções variantes em função da envergadura, e conexõesnão contínuas. Além disso, o tempo de execução do algoritmo em segundos, mesmo paraum computador de uso pessoal, foi excelente.
Tanto o modelo teórico como a simulação convergiram para valores próximos aosexperimentais. Surge então o questionamento: Porque não simplificar e usar apenaso método teórico baseado no equacionamento simples então? As razões podem serexplicitadas nos seguintes tópicos:
• As equações teóricas apresentadas são formuladas nas hipóteses de que o corpo tenhamateriais isotrópicos e contínuos, seções constantes e isoladas das interações externas.Entretando, parâmetros como massas não estruturais (acelerômetros, combustível,motores) alteram as frequências naturais e os modos de vibração da asa. A simulaçãocomputacional possibilita pelo método de massas concentradas que essas alteraçõessejam estudadas no projeto.
• A formulação dos elementos finitos permite que sejam selecionadas os parâmetrosde massa e rigidez para cada elemento, representando assim cada porção da asalocalizadamente. Projetos aeronaúticos são multidisciplinares contendo estudos emaerodinâmica, cargas, estruturas, entre outros. Com isso, artifícios aerodinâmicoscomo enflechamento, torção e afilamento, que alteram as características geométricasda asa ao longo da envergadura, influem diretamente nos cálculos da dinâmicaestrutural da aeronave necessitando assim serem simulados.
Por fim, cabe ressaltar, que para o modelo dinâmico estrutural ter sucesso dependediretamente da calibração dos parâmetros inerciais, condições de contorno e rigidez daestrutura. Independente do tipo de elemento adotado nas simulações, testes experimentaisem fase final de projeto são indispensáveis para a certificação e calibração desses parâmetros.

63
Para trabalhos futuros, as seguintes sugestões foram propostas:
• Verificação do erro do modelo para as frequências naturais de maior ordem.
• Incrementar na modelagem mais graus de liberdade, inserção de parâmetros dafuselagem, aileron. Efetuando a análise modal para a aeronave completa.
• Acoplar o algoritmo em elementos finitos com o método dos painéis para a modelagemde interação entre fluido e estrutura
64
REFERÊNCIAS
[1] ALBERTO, J. A.C.F. ; RAIA F. Estudo dos modos de vibração de uma asa deaeromodelo sob a influência de um sistema de propulsão acopladoJornada de IniciaçãoCientífica,2011
[2] AVITABILE,P. Modal Testing: A practitioner’s Guide .JohnWiley & Sons, Inc., 2018.
[3] BARBOSA, F.S. Análise Experimental em Dinâmica das Estruturas . Juiz de Fora,2016.
[4] BATHE,K.J. Finite Element Procedures New Jersey: Prentice-Hall, 1996.
[5] BISPLINGHOFF, R.L. ; ASHLEY,H. Principles of Aeroelasticity. Dover Publications,2002.
[6] BOUVET, C. Mechanics of Aeronautical Composite Materials . JohnWiley & Sons,Inc., 2017.
[7] Bruel & Kjaer, 2016.https:\\bksv.com\media\literature\Product_Data\bp1841.ashx
[8] COOLEY, J.W.; TUKEY J.W. An Algorithm for the Machine Calcution of ComplexFourier Series Math. Comp. 19 , p.5 , 1965.
[9] CLOUGH,R.Dynamics of Structures Mcgraw-Hill College , 2003.
[10] DIAZ, F.S.; CASTRO,M.S.; MEIER, R.B.;PINHEIRO,M.A. Modelagem Computacio-nal e análise Modal da asa de um veículo aéreo não tripulado com problema de flutterAssociação Brasileira de engenharia e ciências mecânicas (2011).
[11] EWINS, D.J.Modal Testing: Theory, Practice and Application Research Studies Press,2000.
[12] FERNANDEZ,A.O.J.Estudo das Características Modais de um Modelo de Aeronaveem Alumínio Guaratinguetá, 2016. 94 f.
[13] FU, Z.F.; HE, J.Modal Analysis Butterworth-Heinemann,2001.
[14] FUNG, Y. C. An Introduction to the Theory of Aeroelasticity Dover Publications,Inc., 2002.
[15] GIRDHAR, P.; SCHEFFER, C. Pratical Machinery Vibration Analysis & PredictiveMaintenance IDC Technologies, 2004.
[16] GUPTA,A.; SEILER,P.J.; DANOSWKY, B.P. Ground Vibration Tests on a FlexibleFlying Wing Aircraft AIAA Atmospheric Flight Mechanics Conference, AIAA SciTechForum, 2016.
[17] HIBBELER, R.C. Dinâmica - Mecânica para engenharia Pearson 10aed ,2005.
[18] HIBBELER, R.C. Resistência dos Materiais. Pearson,2009.
[19] LEVINZON, F. Piezoelectric Accelerometers with Integral Electronics. Springer Inter-national Publishing, 2015.

65
[20] Lynx Tecnologia, 2016b.http:\\www.lynxtec.com.br\prod_ads1800.html
[21] MEGSON, T. Aircraft structures for engineering students. São Paulo: PearsonPrentice Hall, 2009.
[22] MERHAV,S.Aerospace sensor systems and applications. New York: Springer, 1996.
[23] Nasa, 2014. https:\\www.nasa.gov\centers\armstrong\research\X_56\index.html
[24] PALMEIRA, A. Vibrações Mecânicas. E-Papers, 2007.
[25] RAO, S. S. Mechanical Vibrations in SI Units. Pearson, 2017.
[26] SAHIN, M.; SAKARAYA, E.; ÜNLUSOY, L.; INSUYU, E.T.; SEBER, G., ÖZGEN,S.; YAMAN, Y. Design, analysis and experimental modal testing of a mission adaptivewing of an unmanned aerial vehicle. In: UVW2010, International Unmanned VehicleWorkshop, Paper ID: 10, 10–12 Haziran, HHO, Istanbul, 2010.
[27] SALEHI; MEHDI; ZIAEI-RAD, S. Ground Vibration Test (GVT) and correlationanalysis of an aircraft structure model. Iranian Journal of Science and Technology,Transaction B: Engineering. 31.
[28] SCZIBOR, V. Identificação modal de uma estrutura aeronáutica via algoritmo derealização de sistemas. 2002.
[29] SEGERLIND, l. Applied Finite Element Analysis. JohnWiley & Sons, Inc.,1984.
[30] SOARES,C . Análise de Flutter em uma Aeronave em Fase de Projeto Conceitual.Ita,2003.
[31] SMITH, S. Digital Signal Processing - A Pratical Guide for Engineers and Scientists.Newnes,2003.
[32] WRIGHT, J. E.; COOPER, JAN,R. Introduction to Aircraft Aeroelasticity and Loads.England: Wiley, 2015.
[33] ZIENKIEWICZ, O.C.; TAYLOR, R.L. The finite element method. Volume 1 - Thebasis. McGraw-Hill , 2000.

66
ANEXO A – TERMO DE AUTENTICIDADE
Termo de Declaração de Autenticidade de Autoria
Declaro, sob as penas da lei e para os devidos fins, junto à Universidade Federal de Juiz deFora, que meu Trabalho de Conclusão de Curso do Curso de Graduação em EngenhariaMecânica é original, de minha única e exclusiva autoria. E não se trata de cópia integralou parcial de textos e trabalhos de autoria de outrem, seja em formato de papel, eletrônico,digital, áudio-visual ou qualquer outro meio.
Declaro ainda ter total conhecimento e compreensão do que é considerado plágio, nãoapenas a cópia integral do trabalho, mas também de parte dele, inclusive de artigos e/ouparágrafos, sem citação do autor ou de sua fonte.
Declaro, por fim, ter total conhecimento e compreensão das punições decorrentes da práticade plágio, através das sanções civis previstas na lei do direito autoral1 e criminais previstasno Código Penal2, além das cominações administrativas e acadêmicas que poderão resultarem reprovação no Trabalho de Conclusão de Curso.
Juiz de Fora, 20 de Junho de 2018.1 LEI N◦ 9.610, DE 19 DE FEVEREIRO DE 1998. Altera, atualiza e consolida a legislação sobre
direitos autorais e dá outras providências.2 Art. 184. Violar direitos de autor e os que lhe são conexos: Pena – detenção, de 3 (três) meses a 1
(um) ano, ou multa.

67
Raphael Ote Oliveira – DiscenteMatrícula: – CPF:





























