Embed Size (px)
Citation preview

RBRH — Revista Brasileira de Recursos Hídricos Volume 14 n.3 Jul/Set 2009, 37-50
37
Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
Juan Martín Bravo, Walter Collischonn & Carlos Eduardo Morelli Tucci
Instituto de Pesquisas Hidráulicas, UFRGS [email protected], [email protected], [email protected]
Recebido: 03/09/08 - revisado: 24/10/08 - aceito: 13/07/09
RESUMO
Os complexos processos do ciclo hidrológico podem ser representados por meio da modelagem hidrológica, sendo os modelos que simulam o processo de transformação da chuva em vazão os mais utilizados. Esses modelos são baseados em equações matemáticas que descrevem, de forma simplificada, o comportamento hidrológico da bacia e possuem parâmetros que devem ser definidos através de um processo de calibração. A calibração manual, por tentativa e erro pode ser uma tarefa tediosa, sobretudo quando o usuário do modelo é inexperiente. A calibração automática, por sua vez, utiliza técnicas numé-ricas de otimização baseadas no uso intensivo de computadores. Esse trabalho apresenta um algoritmo evolucionário multi-objetivo de otimização desenvolvido por Vrugt et al. (2003) e aplicado na calibração automática do modelo hidrológico IPH II. Os resultados obtidos são promissores, o algoritmo conseguiu uma aproximação uniforme do frente de Pareto nos diferen-tes testes realizados, mantendo os extremos da mesma bem representados. Ainda mostrou algumas vantagens sobre outro algoritmo evolucionário multi-objetivo atualmente utilizado na calibração automática do modelo hidrológico IPH II. Palavras-chave: calibração automática, modelo hidrológico, algoritmo evolucionário multi-objetivo, MOSCEM-UA, IPH II.
INTRODUÇÃO
Os modelos hidrológicos que simulam a transformação da chuva em vazão são ferramentas que representam, de forma simplificada, os diversos processos do ciclo hidrológico que interagem numa bacia hidrográfica. Esses modelos são baseados em equações matemáticas que possuem parâmetros que caracterizam o comportamento hidrológico de bacia (Tucci, 1998). Alguns desses parâmetros represen-tam abstrações da realidade e, em conseqüência, não podem ser medidos. Nessas circunstâncias, o ajuste dos valores dos parâmetros é realizado através do processo de calibração, com base nas informa-ções hidrológicas existentes.
O objetivo da calibração é encontrar os va-lores dos parâmetros do modelo que permitam uma boa representação do comportamento hidrológico da bacia. A vazão no exutório da bacia engloba os diversos processos hidrológicos e por isso é geral-mente utilizada na avaliação do processo de calibra-ção. Dessa forma, espera-se que uma boa represen-tação do comportamento hidrológico da bacia seja encontrada quando as vazões calculadas pelo mode-lo reproduzam, com boa precisão, às vazões obser-vadas.
Uma das técnicas pioneiras de calibração é a cali-bração manual por tentativa e erro. Essa técnica é um processo iterativo, onde o usuário do modelo altera os valores dos parâmetros em cada simulação. Esse processo continua até que o usuário decida que o resultado encontrado é satisfatório na comparação entre as vazões calculadas e observadas. Uma das grandes vantagens desse procedimento é permitir que o usuário agregue ao processo sua experiência e conhecimento sobre o modelo. Porém, a calibração manual pode ser um processo muito lento, repetiti-vo e tedioso, especialmente quando o modelo utili-zado tem um grande número de parâmetros e o usuário é inexperiente (Collischonn e Tucci, 2003). Isto acontece porque muitas vezes é difícil deduzir a lógica pela qual os parâmetros deveriam ser ajusta-dos para melhorar a representação (Sorooshian e Gupta, 1995).
Com o objetivo de tornar mais rápido e efi-ciente o processo de calibração, foram desenvolvidas técnicas de otimização que se baseiam na utilização intensiva de computadores para a calibração automá-tica de modelos hidrológicos. Para avaliar os resulta-dos do processo de calibração foram propostas dife-rentes medidas de desempenho baseadas, geralmen-te, nos erros entre as vazões calculadas e observadas. Em uma primeira abordagem, cada uma das medi-

Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
38
das de desempenho era utilizada de forma isolada durante a calibração, dando origem à calibração au-tomática mono-objetivo. Como resultado deste proces-so, um único conjunto de parâmetros era obtido ao se maximizar uma única medida de desempenho.
Porém, na modelagem hidrológica não exis-te um único conjunto de parâmetros capaz de re-presentar todos os processos hidrológicos, devido às incertezas: nos dados, nas simplificações do modelo e na representatividade dos valores dos parâmetros. O conceito de eqüifinalidade, introduzido por Be-ven e Binley (1992), estabelece a possibilidade de existência de vários conjuntos de parâmetros que de forma apropriada resultarão na resposta desejada. Isto fica mais evidente quando com um determina-do conjunto de parâmetros é obtido um bom ajuste dos picos dos hidrogramas e com outro obtém-se também bom ajuste dos períodos de estiagens.
A calibração automática multi-objetivo procura a maximização de várias medidas de desempenho em forma simultânea, gerando vários conjuntos de parâmetros como resultado do processo. Diferentes algoritmos numéricos de otimização foram desen-volvidos na calibração automática multi-objetivo de modelos hidrológicos, sendo os algoritmos evolu-cionários os que têm recebido maior atenção nas últimas décadas.
Neste artigo é descrito um algoritmo de ca-libração automática multi-objetivo de modelos hi-drológicos baseado em um algoritmo evolucionário. O algoritmo original foi desenvolvido por Vrugt et al. (2003) e aplicado no modelo SAC-SMA, ou Sa-cramento, e outros (por exemplo, Schoups et al., 2005; Johnsen et al., 2005; Pande et al., 2005; Bos e Vreng, 2006). Esse trabalho apresenta a descrição do algoritmo bem como uma aplicação usando o mode-lo hidrológico IPH II (Tucci, 1998). CALIBRAÇÃO MULTI-OBJETIVO DE MO-DELOS HIDROLÓGICOS
A vazão estimada pelo modelo hidrológico, em cada intervalo de tempo, depende do valor da precipitação (Pt) e do valor dos parâmetros ( θ ). Isto é:
=θ)(Q̂ t F [ Pt , θ ] (1)
onde F[.] é o modelo hidrológico e )(Q̂ t θ é vazão estimada no intervalo de tempo t.
Existindo dados observados das variáveis de saída (Q), pode ser calculada a diferença entre os valores simulados e observados que representa o erro come-tido na estimativa do modelo:
)(Q̂Q)(E ttt θ−=θ , t= 1,2,.....,NT (2) onde NT é o número de intervalos de tempo da simulação.
As medidas de desempenho dos modelos hidrológicos estabelecem diferentes formas de avali-ar )(E θ e são chamadas de funções-objetivo )E(G )(θ .
Algumas funções-objetivo dão maior peso a erros de pico e outras nas vazões de estiagem. As equações 3 a 6 apresentam exemplos de funções-objetivo, sendo F1 o desvio padrão, F2 o desvio padrão do inverso das vazões, F3 o desvio absoluto médio e F4 o coeficiente de Nash e Sutcliffe:
NT
))(Q̂Q(F
NT
1t
2tt
1
∑=
θ−= (3)
NT
))(Q̂
1Q1
(
F
NT
1t
2
tt2
∑= θ
−
= (4)
NT
)(Q̂QF
NT
1ttt
3
∑=
θ−= (5)
∑
∑
=
=
−
θ−−=
NT
1t
2t
NT
1t
2tt
4
)QQ(
))(Q̂Q(1F (6)
onde Qt é a vazão observada no intervalo de tempo
t, )(Q̂ t θ é a vazão calculada no intervalo de tempo
t, Q é a média das vazões observadas e NT é o nú-mero de intervalos de tempo da simulação.
A calibração multi-objetivo consiste na mi-nimização (ou maximização) de duas ou mais fun-ções-objetivo no processo de ajuste dos valores dos parâmetros do modelo.
Na calibração multi-objetivo se apresentam dois tipos de soluções: (1) soluções dominadas, com as quais são obtidos valores piores, em todas as fun-ções-objetivo, se comparadas às outras soluções; (2) soluções não-dominadas ou ótimas de Pareto, com as quais são obtidos valores das funções-objetivo que,

comparadlhores emoutra ou
Ovo da cauma supconhecidto definedefinido subjetiva funções-o
Ade calibrque possua minimObserva-sjunto de no espaçono espaçrâmetros parâmetrço das fuparâmetr(ponto a)
Aextremosidentificaexemplo,definidasA e a B, e
Figura
dos a todas am uma ou ma
outras. O grupo de salibração muperfície (no da como frene o trade-off
sem estabelpara minimi
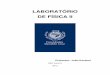
objetivo a cusA Figura 1 aração multi-oui dois parâm
mização de se nessa figu
parâmetros o dos parâmo das funçõ
identificadoros) define ounções-objetivros A, diferen). A curva (espas são os ponta todas as , c e d). Ass por conjune são identific
1 - Calibração fu
RB
as restantes sais funções-o
soluções nãoulti-objetivo.
espaço dasnte de Pareto
entre as fulecer uma pizar (ou maxista de outras.apresenta umobjetivo de umetros ( 1,θθduas funçõe
ura que um (representa
etros) tem ases-objetivo. Oo pelo pon
o ótimo de FI
vo). Por sua nte de B, def
aço das funçtos a e b é o soluções nãs soluções ntos de parâmcados pela re
multi-objetivounções-objetiv
RBRH — Revis
soluções, serãbjetivo e pio
o-dominadas Esse grupo
s funções-objo. O frente denções-objetiv
preferência rimizar) algum.
m exemplo sum modelo t
2θ ), considees-objetivo (determinad
ado por um ssociado um O conjunto to B (espaçI (ponto b novez, o conjufine o ótimo
ções-objetivo)frente de Pa
ão-dominadasnão-dominadmetros difereeta que liga o
o de um modevo. (a) Espaço
sta Brasileira
39
ão me-res em
é o al-forma
bjetivo) e Pare-vo e é relativa ma das
simples teórico erando (FI,FII). o con-ponto ponto de pa-
ço dos o espa-nto de
o de FII
) cujos areto e s (por
das são entes a os pon-
tdpc
pudcumme
AM
namctvvwC
elo teórico comdos parâmetro
a de Recurso
tos A e B no da na Figurapara o b, a contrabalanç
O frepontos. Dadautilizadas na drológicos sãcesso (Tucci,uma aproximmação do frmaior númerexista uma bo
ALGORITMMULTI-OBJ
Os anuméricas danalogias commente, o procomportametécnicas basevivos seguemvivência do mwin (GoldbeCoelho, 2003
m dois parâmeos, (b) Espaço
os Hídricos V
espaço dos pa 1(b) que melhora em
çada pela detente de Pareas as caracter
calibração aão utilizadas , 1998). As t
mação do frerente de Parro de soluçõeoa representa
MOS EVOLUJETIVOS
algoritmos ede otimizaçãm a naturezocesso de evnto social de
eadas no prom o principio mais apto, inerg, 1989; L3) e são o foc
tros considerao das funções-o
Volume 14 n.3 Ju
parâmetros. partindo de
m uma funçãterioração nato é integradrísticas das fuautomática dtécnicas numécnicas num
ente de Paretreto trata des não-dominação do mesm
UCIONÁRI
evolucionárioão e busca za, as quais ivolução de se animais e inocesso de evo
de seleção ntroduzido po
Lacerda e Cco desse traba
ando a minimiobjetivo.
ul/Set 2009, 37
Observa-se asde o ponto
ão-objetivo sea outra. do por infiniunções-objetde modelos méricas no p
méricas defineto. Essa aproe identificarnadas para qmo.
IOS
os são técnicinspirados eincluem, gerseres vivos ensetos. Aqueolução de senatural e sobor Charles D
Carvalho, 199alho.
zação de duas
7-50
ain-o a erá
tos ivo hi-
pro-em oxi-r o que
cas em ral-e o elas res
bre-Dar-
99;
s

Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
40
Um algoritmo evolucionário multi-objetivo parte de uma população inicial de soluções candida-tas, aleatoriamente distribuídas no espaço factível, que evolui em direção a uma aproximação do frente de Pareto através de sucessivas iterações e avaliações das funções-objetivo. A chance de um indivíduo da população ser selecionado para participar no pro-cesso de evolução depende do valor de aptidão do indivíduo. Quanto melhor o valor de aptidão de um indivíduo, maior é a probabilidade de ser escolhido para participar do processo de evolução. A aptidão é, geralmente, definida com base na proximidade de uma solução candidata à aproximação do frente de Pareto. Soluções não-dominadas têm melhores aptidões, as soluções dominadas, entretanto, apre-sentam piores aptidões. As formas de calcular a ap-tidão e a técnica utilizada no processo de evolução são onde se apresentam as maiores diferencias entre os algoritmos evolucionários multi-objetivos.
Dentro das aplicações com sucesso de algo-ritmos evolucionários multi-objetivos nas áreas de recursos hídricos existem diferentes aplicações de algoritmos genéticos. Algoritmos genéticos multi-objetivos têm sido utilizados, por exemplo, no dese-nho de um sistema de reservatórios de detenção (Yeh e Labadie, 1997), na determinação da taxa de remoção de cargas poluidoras (Burn e Yulianti, 2001), na configuração ótima de plantas de potabili-zação da água (Vink e Schot, 2002) e em problemas de monitoramento de águas subterrâneas (Cieni-awski et al., 1995).
Mais recentemente têm sido desenvolvidos novos algoritmos genéticos multi-objetivos, como a família de modelos NSGA, NSGAII (Non-Dominated Sorted Genetic Algorithm, Deb et al., 2002) e ε-NSGAII (Epsilon Dominance NSGAII, Kollat e Reed, 2006). Este último tem-se apresentando como um dos algo-ritmos evolucionários de melhor desempenho na calibração automática multi-objetivo do modelo hidrológico SAC-SMA (Sacramento Soil Moisture Ac-counting model, Burnash, 1995), conforme os testes efetuados por Tang et al (2006). Ainda nesses testes, o algoritmo evolucionário SPEA2 (Strength Pareto Evolutionary Algorithm, Ziztler e Thiele, 1999) apre-sentou resultados equivalentes aos obtidos com o ε-NSGAII.
Yapo et al. (1998) desenvolveram o MO-COM-UA (Multiobjetive Complex Evolution Method — Universidade de Arizona) sendo aplicado na calibração de diferentes modelos hidrológicos como, por e-xemplo, apresentado em Sorooshian at al. (1998), Gupta et al. (1998) e Collischonn e Tucci (2003).
Vrugt et al. (2003) apresentaram o MOS-CEM-UA (Multiobjetive Shuffled Complex Evolution Metrópolis — Universidade de Arizona). O MOSCEM-UA foi desenvolvido com o objetivo de melhorar algu-mas deficiências detectadas no MOCOM-UA quan-do utilizado para calibrar modelos com muitos pa-râmetros (Vrugt et al., 2003). O MOSCEM-UA combina uma estratégia probabilística de busca e evolução conhecida como covariance-annealing, a mistura de complexos (os complexos são subconjun-tos de soluções candidatas) e uma regra de atribui-ção de aptidão baseada nos conceitos de dominân-cia e não-dominância de Pareto. O MOSCEM-UA foi também aplicado na calibração de modelos hidroló-gicos, como apresentado no texto original de Vrugt et al (2003) e em, por exemplo, Schoups et al. (2005), Johnsen et al. (2005), Pande et al. (2005), Bos e Vreng (2006), Barros (2007).
O algoritmo MOSCEM-UA é utilizado nesse trabalho para a calibração automática multi-objetivo do modelo IPH II, e descrito separadamente, no texto. ALGORITMO MOSCEM-UA
O algoritmo MOSCEM-UA (Vrugt et al., 2003) inicia com a definição dos limites mínimos e máximos dos valores que os n parâmetros a serem calibrados podem tomar, definindo uma região ou hipercubo.
A seguir, são gerados, a partir de uma distri-buição de probabilidades definida (geralmente uni-forme), ns conjuntos de parâmetros ou pontos na região válida que definem uma população de solu-ções candidatas. Cada ponto é dado pelos valores dos n parâmetros e para cada um dos pontos as nf funções-objetivo são avaliadas.
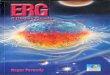
Uma vez obtidos os valores das funções-objetivo, os conjuntos de parâmetros são avaliados e hierarquizados pelos critérios de dominância e não-dominância descritos anteriormente. A hierarquiza-ção é baseada na aptidão das soluções e realizada em duas etapas. Na primeira etapa, cada ponto re-cebe o valor de um índice com base no conceito de classificação de soluções em problemas multi-objetivos dado por Goldberg (1989), seguindo os passos a seguir (Figura 2(a)):
a) Identifica-se, dos ns pontos, aqueles que são dominados e os que são não-dominados.
b) Aos pontos que são não-dominados atribua um índice igual a um.

RBRH — Revista Brasileira de Recursos Hídricos Volume 14 n.3 Jul/Set 2009, 37-50
41
c) Os pontos com o índice igual a um são reti-rados temporariamente da população e os pontos restantes são novamente analisados.
d) Aos pontos que são não-dominados nesta segunda análise, atribua um índice igual a dois.
e) Os pontos com o índice igual a dois tam-bém são retirados e os pontos restantes são analisados.
f) Os passos se repetem até que se encontre um grupo de pontos em que não podem ser definidos dominados e não-dominados, sendo atribuído a esses pontos o maior valor do índice.
Na segunda etapa é calculado o ranking dos
diferentes pontos da população (Figura 2(b)), con-forme apresentado por Vrugt et al. (2003). O ran-king dos pontos com índice igual a um (soluções não-dominadas) é dado pela equação 7:
ns
ndoma
jnãodomj = (7)
onde aj
nãodom é o ranking do ponto não-dominado j, ndomj é o número de pontos dominados pelo ponto j e ns é o número de pontos da população. Observa-se na equação 7, que o ranking das soluções não-dominadas é sempre menor ou igual a um. O ranking de cada ponto dominado é calcu-lado pela somatória do ranking de todas as soluções não-dominadas que dominam esse ponto, incremen-tada do valor de seu índice restado menos um, isto é:
1indiceaa i
nnãodom
1jj
domi
inãodom −+= ∑
= (8)
onde ai
dom é o ranking do ponto dominado i, nnão-domj é o número de pontos não-dominados que dominam ao ponto i. O ranking dos pontos domi-nados é sempre superior a um.
Ao final da etapa de hierarquização, cada um dos pontos tem um ranking, que indica, apro-ximadamente, a qualidade relativa das funções-objetivo associadas. Quanto menor o valor do ran-king de uma solução, melhor é sua aptidão. Quanto melhor a aptidão, mais próximo o ponto está da aproximação do frente de Pareto. A Figura 2 apre-senta um exemplo com nove pontos hierarquizados, conforme o valor de duas funções-objetivo, que devem ser minimizadas.
Posteriormente os pontos da população são ordenados por valor crescente do ranking, isto é, o primeiro ponto possui o menor ranking (melhor aptidão), o segundo ponto possui o segundo menor ranking (segunda melhor aptidão) e assim por dian-te, o último ponto é o que apresenta a pior aptidão (maior valor do ranking), gerando uma matriz de resultados ordenados D(ns,nf).
A população de pontos é dividida em q con-juntos, chamados de complexos (Ci, i=1,...,q), cada um contendo m (m=ns/q) pontos, tais que o pri-meiro complexo contém todos os q(j—1)+1 pontos ordenados de D, o segundo complexo contém todos os q(j—1)+2 pontos ordenados de D, e assim por diante, onde j = 1, 2, ..., m. Dessa forma, cada com-plexo possui soluções boas (baixo valor do ranking) e ruins (maiores valores do ranking).
Posteriormente são iniciadas q seqüências paralelas (Si, i=1,...,q), cada uma delas começando no ponto que exibe melhor aptidão de cada com-plexo. Cada uma dessas seqüências evolui com base num processo de reprodução, explicado mais adiante. Os complexos são reunidos em determinados nú-meros de iterações, de forma periódica, e a popula-ção misturada de forma a permitir a troca de infor-mação entre os diversos complexos. A população é ordenada, novos complexos são formados e o pro-cesso de evolução continua até obter uma aproxi-mação do verdadeiro frente de Pareto.
O algoritmo de evolução de cada seqüência do MOSCEM-UA, chamado covariance-annealing, foi descrito por Vrugt et al. (2003) como segue:
a) Inicio: são selecionados os valores do núme-ro de passos de evolução em cada complexo antes do misturado (L) e o fator de escala (γ) que influi na probabilidade de aceitação dos pontos candidatos gerados.
b) Geração dos pontos candidatos: é calculada a matriz de covariância Covi dos parâmetros de Ci e gerado o ponto candidato com base numa distribuição normal multivariada cen-trada na marca atual (último valor da se-qüência i, espaço dos parâmetros) através da seguinte equação:
( ) ( )( )it
i1t
i Cov,N θ=θ + (9) onde θ(t) é a marca atual de Si, N(.) é o operador de distribuição normal e θ(t+1) é o ponto candidato ge-rado na seqüência i.

Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
42
a) Regra de aceitação tipo algoritmo Metrópo-lis (Metrópolis et al. (1953) apud Vrugt et al., 2003):
1. Seleção do patamar de aceitação: de forma aleatória é escolhido um patamar (Z) com base em uma distribuição de probabilidades uniforme no intervalo [0,1].
2. Cálculo do ranking do ponto candidato (ai
t+1) usando os pontos em Ci e a marca a-tual de Si.
3. Cálculo do quociente α com base na seguin-te equação:
1t
ia
1ti
ti
a
a+⋅γ
+
=α (10)
onde γ é o fator de escala e ai
t é o ranking da marca atual de Si.
1. Se α ≥ Z o ponto candidato é aceito e passa a ser o valor da marca da seqüência na pró-xima iteração. Caso contrário é rejeitado e na próxima iteração a seqüência permanece na posição atual, sendo θi
(t+1)=θi(t).
2. Substituir o pior ponto de Ci com θi(t+1).
O algoritmo MOSCEM-UA tem quatro pa-
râmetros que devem ser definidos pelo usuário: o tamanho da população de pontos (ns), o número de seqüências e complexos (q), que em conjunto de-terminam o número de pontos em cada complexo m (ns/q), o número de passos de evolução em cada complexo antes do misturado (L) e o fator de escala (γ).
O parâmetro L representa o número de pas-sos de evolução de cada complexo, ou seja, o núme-ro de vezes que são criadas novas soluções candida-tas em cada complexo, antes do misturado de todos os complexos na população. Por sua vez, o parâme-tro γ governa a probabilidade de aceitação de solu-ções candidatas que possuem um ranking menor que o correspondente à marca atual da seqüência na qual se encontra o complexo. Quanto maior o valor do fator de escala γ, menor a probabilidade de aceitação dessas soluções candidatas.
Nos testes efetuados foi adotado um valor de L igual ao número de parâmetros do modelo hidrológico e γ=0,50 (ambos os valores recomenda-dos pelos autores do algoritmo). Dessa forma os únicos parâmetros do algoritmo que devem ser de-finidos pelo usuário são o tamanho da população ns e o número de complexos q.
O código computacional do algoritmo MOSCEM-UA utilizado nesse trabalho foi desenvol-vido em Fortran e em duas versões. A primeira ver-são é um programa seqüencial preparado para exe-cução em computadores com um único processa-dor. Por sua vez, na segunda versão, foram incorpo-radas linhas de sentenças de OpenMP para a execu-ção em paralelo em um computador previsto de múltiplos processadores com memória compartilha-da.
O OpenMP surgiu como uma alternativa aos métodos tradicionais de programação em paralelo com o objetivo de permitir o desenvolvimento de códigos computacionais capazes de utilizar o hard-ware já existente nos computadores. Não é uma nova linguagem de programação, trata-se de um conjunto de diretivas de compilação, bibliotecas e variáveis que podem ser utilizadas para programação em paralelo (Hermanns, 2002; Chapman et al., 2008).
O OpenMp permite: (1) criar equipes de t-hreads para execução em paralelo; (2) especificar como compartilhar as tarefas entre os membros da equipe; (3) declarar as variáveis privadas e comparti-lhadas; (4) sincronizar e estabelecer tarefas exclusi-vas entre as threads. Uma thread é uma entidade que pode executar, de forma independente, um conjun-to de instruções. ESTUDOS DE CASO
Na avaliação da eficiência e eficácia do algo-ritmo MOSCEM-UA foram efetuados três testes con-siderando problemas de otimização multi-objetivo com complexidade crescente.
No primeiro exercício foi resolvido um pro-blema teórico de otimização considerando três fun-ções-objetivo, proposto em Vrugt et al. (2003) e cuja solução teórica é conhecida de trabalhos anteriores.
No segundo e terceiro exercício, o algorit-mo MOSCEM-UA é utilizado na calibração automá-tica do modelo IPH II. O modelo IPH II está descri-to em Tucci (1998), e trata-se de um modelo hidro-lógico concentrado com sete parâmetros que po-dem ser calibrados. Nesses exercícios, os resultados obtidos foram comparados aos correspondentes ao algoritmo MOCOM-UA (Yapo et al., 1998), com base na versão desenvolvida e testada por Collis-chonn e Tucci (2003). O algoritmo MOCOM-UA é atualmente utilizado na calibração automática desse modelo hidrológico.

Figura 2 -
Ubração auum mode(Collischda execuem valorpluviomésérie gerada como mento de
Dna calibrarando umsintética as incertesentação calibraçãoverificar oem enconum únicoque gera mesmo (o
Oautomáticsiderando Problema
Odesenvolvum prob(2003). Ntrês funçdois parâ
- Processo de h
Um teste imputomática delo utilizandonn e Tucci
utando o mores escolhidoétricos e outrada pelo mosérie de vaz
e calibração. Dessa forma, ação automáma serie sintna calibraçãoezas nos daddo modelo fo dos parâmo desempenhntrar um freo ponto, já q
os valores óo escolhido p
O terceiro exca do modelo duas funçõ
a multi-objeti
O desempenhvido foi aval
blema teóricoNesse probleções-objetivo âmetros:
RB
hierarquização
portante queeve superar o uma série , 2003). A sé
odelo, com oos, e com umra de dados dodelo é, postezões observad
o segundo ática do modtética. Ao cono multi-objetdos e na capficando some
metros. Esse ho do algori
ente de Paretque o conjunótimos das fupara a gerar axercício conslo IPH II em ões-objetivo.
ivo teórico
ho do algoriliado, em po apresentadema devem s
seguintes q
RBRH — Revis
o de uma popu
e o método dé a calibraçsintética de
érie sintética os parâmetroma série de de evaporaçãeriormente, das para o pr
exercício coelo IPH II considerar umtivo são elimpacidade de ente a incertexercício p
itmo MOSCEto que consinto de parâm
unções-objetia serie sintétisistiu na calibum caso rea
itmo MOSCErimeiro luga
do em Vrugtser minimizaque depende
sta Brasileira
43
ulação de solu
de cali-ção de vazões é obti-
os fixos dados
ão. Esta utiliza-rocedi-
onsistiu onside-a série
minadas repre-
teza na permite EM-UA ste em metros ivo é o ica). bração al, con-
EM-UA ar, em t et al. adas as em de
M
M
M
s
dttm
d5c1
T
a de Recurso
uções. (a) Atrib
Min: FA = θ12
Min: FB = (θ12
Min: FC = θ12
sujeito a -2 ≤
O code Pareto dtriangular, ntremos (0,0)mente.
Na rderadas popu50, 100 e 24complexos (q1 apresentam
Tabela 1 - Númdo número d
Complexos
1 3 5 10 20
os Hídricos V
buição do índi
+ θ22 ,
2 - 1) + θ22
+ (θ22 - 1)
≤ θ1 ≤ 2 e -2
onjunto de padesse problemno espaço do, (0,1) e (1,
resolução deulações de d
40 indivíduosq= 1, 3, 5, 10
m os resultado
mero de soluçõde complexos
após 500
Tamanho30 51043 13017 -3987 4---- >---- -
Volume 14 n.3 Ju
ice, (b) Atribui
e
,
≤ θ2 ≤ 2
arâmetros quma consiste os parâmetro0) para θ1 e
sse problemdiferentes tams) e diferent0, 20). A Figuos obtidos.
ões não domine do tamanho0 iterações.
o da populaçã50 1001122 986---- ---- 4523 >50>5000 >50----- >50
ul/Set 2009, 37
ição do rankin
(1
(1
(1
(1
ue gera o frenem uma ár
os, com os e θ2, respecti
ma foram conmanhos (ns=3tes números ura 3 e a Tab
nadas em funço da população
ão 0 240 6 1002
>5000000 >5000000 >5000000 >5000
7-50
ng.
1)
2)
3)
4)
nte rea ex-iva-
nsi-30, de ela
ção o
0 0 0 0

VeCa
F
F
ria
o roçõdopoconú
tadoçãtemde
erificação da Efialibração Autom
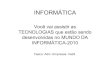
Figura 3 - Conju
Figura 4 - Resua dos conjunto
inv
Observalgoritmo M
o de soluçõesões não domo número deopulação. Deomplexos e oúmero de sol
É impcionais tambo numero deão. Entretants processos iinutos (versã
e um minuto
iciência e Eficácmática do Modelo
untos de parâmnho da p
ultados do testeos de parâmetrversa das vazõe
va-se em todMOSCEM-UA
s não dominminadas encoe complexos essa forma, quo tamanho dluções não doortante lemb
bém se incree complexos to, para esse iniciados conão seqüencia
o (versão em
cia de um Algorio Hidrológico I
metros que gepopulação ns =
e baseado na sros, o MOSCEes; (b) funçõe
dos os casos consegue um
nadas. O númontradas pare
e, ainda, douanto maiorda populaçãominadas enbrar que os cementam come do tamanhprimeiro tesnsumiram mal do algoritmparalelo util
(a)
itmo EvolucionPH II
eraram as soluç= 50 e um núm
série sintética,EM-UA e o MOs-objetivo desv
avaliados qum bom númemero de soluece dependeo tamanho dr o número dão, maior é ncontradas. custos compum o aumentho da populate, os diferen
menos de domo) e menolizando 4 thr
ário Multi-objet
44
ções não dommero de compl
no espaço daOCOM-UA. (a)vio absoluto m
ue e-u-er da de o
u-to a-n-is
os re-
ads) eCPU,
boa ucontraem neprocuuniforsoluçõcom u(c)). Result
funçõ
(a)
tivo na
inadas após 50lexos igual a 1
s funções-obje) funções-obje
médio e coefici
em um proc(4 CPUs), 2.
Observa-seuniformidadeadas, não exenhum setor
urada. Aindarmidade é mões encontraum maior nú
tados com o
Em cada ues-objetivo
(b)
000 iterações, (a), 2 (b) e 5
etivo e consideetivo desvio paiente de Nash
cessador Inte4 GHz. e ainda na Fie das soluçõexistindo concr particular da com um úmantida, embadas (Figura mero de com
modelo IPH
um dos testesforam con
considerando(c).
erando a geraçadrão e desvio
e Sutcliffe.
el® Core(TM
igura 3 que ees não domicentrações dedessa região único compbora a dens3(a)) seja m
mplexos (Figu
H II
s efetuados, nsideradas,
o um tama-
ção aleató- padrão da
M)2 Quad
existe uma inadas en-e soluções triangular
plexo essa idade das
menor que ura 3(b) e
diferentes conforme
(c)
(b)

apresentaescolha dprocesso funções-otre si, gerresultado Série sinté
Omodelo festabelecção, conffoi geradprecipitaçreal. O inconsiderasete parâIb=2,95; α=12,66.
Acomo a automáticmos MOcasos forae no MOS
Tabela 2 râmetros
Parâmet
Io Ib H Ks Ksub Rmáx
α
Fem cada so de calilise foramconjuntobuição mmínimo Os resultainda apr
ado a seguirdas funções-o
de calibraçãobjetivo que ralmente são
os (Tassi et al
ética Os parâmetrforam todosidos limites
forme a Tabeda a partir dção e evaporntervalo de tado abrange âmetros paraH=0,13; Ks=
A série sintétisérie de vazca do model
OSCEM-UA eam utilizadoSCEM-UA, 1
- Limites máxdo modelo IP
tro Unidad
mm.∆t-1
mm.∆t-1
--- ∆t ∆t mm ---
Foram realizaum deles, duibração (Figu
m ainda geras de parâme
multivariada e máximo dtados em teresentados na
RB
r. É importanobjetivo influão automátic
possuem bao as que fornl., 2006).
ros escolhido os possíveismínimos e
ela 2. A série de um conjuração, dispontempo foi o dois anos. O
a gerar a séri=5,72; Ksub=
ica foi utilizazões observalo IPH II ut
e MOCOM-Uos 100 indivíd0 complexos
ximo e mínimoPH II para a ca
de Valor nimo
1 10 1 0,10
0,00010,01 10 0 0,01
ados dois teuas funções-oura 4). Para ados de formetros conside
uniforme dde cada parâermos de fua Figura 4.
RBRH — Revis
nte ressaltar i nos resultad
ca. Dessa foraixa correlaçnecem os me
os para calibs, aos quais máximos desintética de
unto de dadníveis em umdiário e o p
Os valores dadie foram: Io=
=40,25; Rmáx
ada posterioradas na calibtilizando os aUA. Em ambduos na pops.
o dos valores dalibração autom
mí- Valoximo30010
1 0,99910 5009 20
stes, consideobjetivo no pcomparação
ma aleatória,erando uma dentro dos âmetro (Tabeunções-objetiv
sta Brasileira
45
que a dos do
rma, as ção en-elhores
brar o foram
e varia-vazões
dos de ma série
eríodo dos aos =18,20; x=0,44;
rmente bração algorit-bos os
pulação
dos pa-mática.
r má-o
99
erando proces-e aná-50.000 distri-
limites ela 2). vo são
sefvp
s(Nnpmp
dgregCgcIoro
S
rg
a de Recurso
No psideradas as e desvio padrfunções-objetvalor zero deparâmetros q
No ssideradas as f(eq. 5) e o cNesse caso, animizada (vaparâmetros qmaximizada, pode alcança
Obsedas as soluçõgundo teste)râmetros queem ambos osgoritmo MOCOM-UA. Aigerado em fconjunto de Isto fica claroobtidos consiriamente se objetivo.
Figura 5 - R
Série real Com
rio Tesouras,guaia. Esta ba
os Hídricos V
primeiro testefunções-objerão do inverstivo devem
e ambas encoque gerou a segundo testefunções-objecoeficiente da primeira fualor igual a que gerou a
sendo o valoar igual a umerva-se na Figões (0,0) (p o que signi
e gerou a sérs casos. Isso SCEM-UA coinda, nenhumforma aleatóparâmetros
o na Figura 4iderando os encontra no
Resultados da cobjetivo do m
mo base de da, que é um dacia está loca
Volume 14 n.3 Ju
e (Figura 4(aetivo: desvio so das vazões ser minimiz
ontrado parasérie sintéticae (Figura 4(btivo: desvio a
de Nash e Suunção-objetiv
zero para oserie sintéticor máximo q. gura 4 que foprimeiro testifica que o crie sintética aconteceu t
omo com o m conjunto
ória conseguique gerou a
4 já que nenhparâmetros
o ótimo de a
calibração automodelo IPH II
ados foi utilizdos formadoalizada no est
ul/Set 2009, 37
a)), foram copadrão (eq. (eq. 4). Amb
zadas, sendoa o conjunto a. b)), foram coabsoluto médutcliffe (eq. vo deve ser mo conjunto
ca) e a segunque esta últim
oram encontte) e (0,1) (onjunto de pfoi encontra
tanto com oalgoritmo Mde parâmetr
iu ser igual a serie sintétihum dos pongerados aleaambas funçõ
omática multi-I.
zada a bacia ores do rio Atado de Goiá
7-50
on-3)
bas o o
de
on-dio 6). mi-de
nda ma
tra-(se-pa-
ado al-
MO-ros ao
ica. tos
ato-ões-
-
do Ara-ás,

VeCa
M
Fiu
erificação da Efialibração Autom
Figura 6 - GrMOSCEM-UA.
igura 7 - Computilizando os va
culado utili
Tabela 3 - Val
Parâmetro
Io Ib H Ks Ksub Rmáx
α
(a)
(a)
iciência e Eficácmática do Modelo
ráficos dos valo Cada linha de
paração entre alores dos parizando os valo
lores mínimos
Unidade
mm.∆t-1 mm.∆t-1 --- ∆t ∆t Mm ---
cia de um Algorio Hidrológico I
ores normalizaesses gráficos
os hidrogramarâmetros que gores dos parâm
s e máximos doobjetivo
Faixa de v
Valor mínimo
10 0,10
0,0001 0,01 10 0
0,01
itmo EvolucionPH II
ados dos parârepresenta um
as observados geraram o mel
metros que ger
os parâmetrosutilizando o M
variação viáve
Valormáximo
300 10
0,999910
500 9 20
ário Multi-objet
46
âmetros do mom conjunto de
e calculados nlhor valor do caram o melho
s do modelo IPMOCOM-UA e
el Faix
M
o Valo
mínim24,630,41
9 0,8676,68
10,035,680,01
tivo na
odelo IPH II utparâmetros qu
no período decoeficiente de r valor do des
PH II encontrae o MOSCEM-U
xa de variaçãMOCOM-UA
r mo
Valmáxi
3 38,11 0,67 0,938 7,63 12,78 6,81 2,27
(b)
(b)
tilizando (a) oue gerou uma
calibração. (aNash e Sutclif
svio padrão do
ados na calibraUA.
o F
or imo
Vamín
18 3162 0,434 0,66 3,75 1685 077 0
o MOCOM-UAsolução não d
a) Hidrogramaffe; (b) Hidrog
o inverso das v
ação automáti
Faixa de variaMOSCEM-U
alor nimo
Vm
1,01 3442 9671 0708 6,81 3,54 ,01 1
A e (b) o dominada.
a calculado grama cal-
vazões.
ca multi-
ação UA Valor áximo 38,48 9,446 0,932 7,09
30,50 8,83
18,32

RBRH — Revista Brasileira de Recursos Hídricos Volume 14 n.3 Jul/Set 2009, 37-50
47
em uma região com relevo relativamente ondulado. Essa região pertence à Depressão do Araguaia, sen-do as coberturas vegetais predominantes o cerrado e a pastagem (RADAMBRASIL, 1981). O clima é tropical com duas estações bem definidas: chuvosa, de outubro a março, e seca, de abril a setembro. A precipitação média anual é aproximadamente 1700 mm e a evapotranspiração real estimada, aproxima-damente, 1600 mm.ano-1, tendo o coeficiente de escoamento de longo prazo um valor em torno de 0,35.
Os dados de vazão foram obtidos do posto fluviométrico Ponte rio Tesouras (código 25500000), cuja área é de 1817 km2.
É importante destacar que a quantidade de dados necessários na calibração automática parece depender da complexidade do modelo (em termos do número de parâmetros a ser estimados) e da qualidade e características dos dados (Wagener et al., 2004). Nesse caso, o período de dados conside-rado foi de 5 anos e o intervalo de tempo conside-rado foi de 1 dia.
No processo de calibração foi considerada a maximização do coeficiente de Nash e Sutcliffe (eq. 4) e a minimização do desvio padrão do inverso das vazões (eq. 2). Os algoritmos MOSCEM-UA e MO-COM-UA foram utilizados no processo consideran-do 500 indivíduos na população e, no caso do MOSCEM-UA, 25 complexos.
A Figura 5 apresenta a aproximação do frente de Pareto obtida com o MOCOM-UA e com o MOSCEM-UA para 100.000 iterações. Observa-se nessa figura que existem pontos comuns na parte superior das aproximações do frente de Pareto en-contradas. Entretanto, o extremo inferior do frente de Pareto não é bem representado pelo MOCOM-UA. O MOSCEM-UA consegue encontrar uma me-lhor aproximação do frente de Pareto a qual apre-senta uma descontinuidade na parte central.
Quanto à eficiência de ambas as técnicas, o algoritmo MOCOM-UA levou, em média, 10 minu-tos para efetuar um processo de calibração. O algo-ritmo MOSCEM-UA na sua versão seqüencial con-sumiu, em média, 26 minutos. Por sua vez, o algo-ritmo MOSCEM-UA na sua versão em paralelo le-vou, em média, 21 minutos utilizando 2 threads e 15 minutos utilizando 4 threads ao executar um proces-so de calibração.
Os resultados apresentados na Figura 6 e na Tabela 3 ainda mostram que ambos os algoritmos encontraram soluções comuns. Entretanto, o algo-ritmo MOCOM-UA não conseguiu encontrar o con-junto de parâmetros que combina maiores valores do Ib e do α e valores mais baixos de H e Ks que
geraram as soluções não dominadas na parte inferi-or da aproximação de Pareto obtida pelo algoritmo MOSCEM-UA. Isto pode ser considerado um bene-fício do algoritmo MOSCEM-UA, que consegue manter os extremos do frente de Pareto bem repre-sentados no processo de calibração automática do modelo IPH II.
Na análise dos valores dos parâmetros obti-dos por calibração automática pode-se observar ainda que o parâmetro Rmáx se mostrou como o menos sensível no caso analisado.
A modo de exemplo, o ajuste obtido entre as vazões observadas e calculadas, em 650 dias do período de calibração, é apresentado na Figura 7. Os hidrogramas calculados foram obtidos utilizando os valores dos parâmetros que geraram o melhor valor do coeficiente de Nash e Sutcliffe (correspon-dente à solução localizada no extremo superior do frente de Pareto) na Figura 7(a) e os valores dos parâmetros que geraram o melhor valor do desvio padrão do inverso das vazões (correspondente à solução localizada no extremo inferior do frente de Pareto).
Observa-se na Figura 7 que o hidrograma calculado em (a) apresenta um bom ajuste nos mai-ores valores de vazão. Entretanto, as recessões do hidrograma apresentam, geralmente, valores meno-res que os observados e as vazões mínimas são su-perestimadas, embora o ajuste continue sendo bom. A Figura 7(b) mostra que o hidrograma calculado apresenta um bom ajuste das recessões e estiagens, sendo os picos de vazão, geralmente subestimados. Entre essas duas soluções extremas poderia ser esco-lhido outro conjunto de parâmetros, dentre aqueles que definiram soluções na aproximação do frente de Pareto, gerando um hidrograma calculado que apresentaria um certo compromisso entre ambas as soluções.
Figura 8 - Hidrogramas de vazão observada (linha preta) e calculadas (banda cinza) no período analisado.

Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
48
As incertezas na calibração dos parâmetros avaliadas através da calibração multi-objetivo podem-se estender aos resultados do modelo hidrológico. Nesse caso, todos os conjuntos de parâmetros que geraram soluções não dominadas são utilizados para gerar hidrogramas calculados, como apresentado na Figura 8.
O conjunto de hidrogramas calculados de-fine, em cada intervalo de tempo, um intervalo de vazões que pode ser entendido como uma banda de incerteza associado à calibração dos parâmetros. Obviamente existem outras fontes de incerteza e, por isso, nem sempre a banda de incerteza contém o hidrograma observado. Entretanto, a incerteza asso-ciada à calibração dos parâmetros é razoavelmente bem estimada sendo que alguns hidrogramas ajus-tam melhor os picos e outros as estiagens e reces-sões. CONCLUSÕES
A calibração automática multi-objetivo per-mite a avaliação das incertezas na calibração dos parâmetros dos modelos hidrológicos. Dessa forma, o conhecimento do desempenho de diferentes téc-nicas disponíveis para esses fins é sumamente impor-tante.
Esse trabalho apresentou um algoritmo evo-lucionário multi-objetivo de otimização desenvolvido por Vrugt et al. (2003) e denominado MOSCEM-UA. O algoritmo MOSCEM-UA foi aplicado na cali-bração automática do modelo hidrológico IPH II.
Dois testes foram realizados na calibração automática do modelo IPH II e o algoritmo MO-COM-UA foi utilizado na comparação dos resulta-dos. O primeiro teste foi baseado numa série sintéti-ca e ambos os algoritmos conseguiram encontrar as soluções do problema.
No segundo teste, uma serie real foi utiliza-da sendo obtidos bons ajustes entre as vazões obser-vadas e calculadas pelo modelo IPH II com base nos conjuntos de parâmetros que geraram soluções na aproximação do frente de Pareto.
A aproximação do frente de Pareto obtida pelo algoritmo MOSCEM-UA apresentou uma maior uniformidade, sobretudo nos extremos, que a obti-da com o MOCOM-UA, a técnica atualmente utili-zada na calibração automática do modelo IPH II. Isto pode ser considerado um benefício do algorit-mo MOSCEM-UA, que consegue manter os extre-mos do frente de Pareto bem representados no pro-cesso de calibração automática do modelo IPH II.
Dessa forma, os resultados obtidos são pro-missores. A utilização do MOSCEM-UA é simples, tendo em vista que somente dois parâmetros desse algoritmo devem ser definidos pelo usuário: o ta-manho da população e o número de complexos. A calibração tende a ser melhor com o aumento de ambos os valores desses parâmetros. Entretanto, o aumento dos valores desses parâmetros produz uma diminuição da eficiência do MOSCEM-UA pelo aumento do tempo de processamento, porém para uma população de 500 indivíduos e considerando 25 complexos os resultados são plenamente satisfa-tórios quando são otimizadas duas funções-objetivo. AGRADECIMENTOS
O primeiro autor agradece à Universidade Nacional do Nordeste (UNNE, Argentina) pelo financiamento de seus estudos de mestrado no qual foi iniciada essa pesquisa e ao CNPQ pela bolsa de doutorado concedida. REFERÊNCIAS BARROS, F.V.F. Uso de algoritmos evolucionários na calibra-
ção de modelos hidrológicos e na operação de sis-temas de reservatórios. Dissertação de mestrado, Universidade Federal do Ceará, 177 p., 2007.
BEVEN, K.; BINLEY, A. The future of distributed models: mod-el calibration and uncertainty prediction. Hydrological Processes, v 6, p. 279-298, 1992.
BOS, A.; VRENG, A. Parameter optimization of the HYMOD model using SCEM-UA and MOSCEM-UA. Modelling Geo-Ecological Systems Computational Bio- and Physical Geography. University of Amsterdam, 43p., 2006.
BURN, D.H., YULIANTI, J.S. Waste-load allocation using genetic algorithms. Journal of Water Resources Planning and Management, v 127, n 2, p. 121-129, 2001.
BURNASH, R.J.C. The NWS river forecast system catchment modelling. In: Singh, V. J. (editor) Computer models of watershed hydrology. Water Resources Publica-tions, Highlands Ranch. 1130 p., 1995.
CHAPMAN, B.; JOST, G.; PAS, R. Using OpenMP: portable shared memory parallel programming. MIT Press, Massachusetts, 353 p., 2008.
CIENIAWSKI, S.E., EHEART, J.W., RANJITHAN, S. Using genetic algorithms to solve a multiobjective ground-

RBRH — Revista Brasileira de Recursos Hídricos Volume 14 n.3 Jul/Set 2009, 37-50
49
water monitoring problem. Water Resources Resear-ch, v 31, n 2, p. 399-409, 1995.
COELHO, L. S. F. Notas em matemática aplicada 2. Funda-mentos, potencialidade e aplicações dos algoritmos evolucionários. SBMAC, 99 p., 2003.
COLLISCHONN, W.; TUCCI, C.E.M. Ajuste multi-objetivo dos parâmetros de um modelo hidrológico. Revista Brasi-leira de Recursos Hídricos, v 8, n 3, p. 27-39, 2003.
DEB, K.; PRATAP, A.; AGARWAL, S.; MEYARIVAN, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. on Evol. Comput., v 6, n 2, p. 182-197, 2002.
GOLDBERG, D.E. Genetic algorithms in search, optimization and machine learning. Addison Wesley Longman, Boston, 412 p., 1989.
GUPTA, H.V.; SOROOSHIAN, S.; YAPO, P.O. Toward im-proved calibration of hydrologic models: Multiple and noncommensurable measures of information. Water Resources Res., v 34, n 4 p. 751-763, 1998.
HERMANNS, M. Parallel programming in Fortran 95 using OpenMP, Universidad Politécnica de Madri, 71 p., 2002.
JOHNSEN, K.P.; MENGELKAMP, H.T.; HUNEKE, S. Multi-objective calibration of the land surface scheme TERRA/LM using LITFASS-2003 data, Hydrology and Earth System sciences, v 9, n 6, p. 586-595, 2005.
KOLLAT, J.B.; REED, P.M. Comparing state-of-the-art evolu-tionary multi-objective algorithms for long-term groundwater monitoring design. Advances in Water Resources, v 29, p. 792–807, 2006.
LACERDA, E.G.M.; CARVALHO, A.C.P.L.F. Introdução aos algoritmos genéticos. In: GALVÃO, C.O.; VALENÇA, M.J. S. Sistemas inteligentes: aplicações a recursos hídricos e sistemas ambientais. UFRGS/ABRH. Por-to Alegre, 1999.
METRÓPOLIS, N.A; ROSENBLUTH, A.W.; ROSENBLUTH, M.N.; TELLER, A.H.; TELLER, E. Equations of state calculations by fast computing machines. Journal of Chemical Physics, v 21, n 6, p. 1087-1092, 1953.
PANDE, S.; BASTIDAS, L.A.; ROSERO, E.; MCKEE, M.; SHUTTLEWORTH, W.J.; ROCHA, H.R.; MILLER, S. Effect of Data Uncertainty on Parameter Uncertainty within a Multi-Objective Parameter Estimation Framework, 2005 AGU Fall Meeting, 5-9 dec. San Francisco-USA.
RADAMBRASIL. Levantamento de recursos naturais, v 25. Folha SD 22. Goiás, 1981.
SCHOUPS, G.; HOPMANS, J.W.; YOUNG, C.A.; VRUGT, J.A.; WALLENDER, W.W. Multi-criteria optimization of a regional spatially-distributed subsurface water flow model, Journal of Hydrology, v 311, p. 20-48, 2005.
SOROOSHIAN, S.; GUPTA, V.K. Model calibration In: Singh, V. J. (editor) Computer models of watershed hydrol-ogy. Water Resourc. Pub., Highlands Ranch. 1130 p., 1995.
SOROOSHIAN, S.; GUPTA, H.V.; BASTIDAS, L.A. Calibration of hydrologic models using multi-objectives and visu-alization techniques. Final Report EAR 9418147. Dep. Hydrol. and Water Resource, UA, 78p, 1998.
TANG, Y.; REED, P.; WAGENER, T. How effective and effi-cient are multiobjective evolutionary algorithms at hydrologic model calibration? Hydrology and Earth System Sciences, v 10, p. 289-307. 2006.
TASSI, R.; BRAVO, J.M.; MELLER, A.; COLLISCHONN, W. Avaliação do impacto de diferentes funções-objetivo na calibração automática multi-objetivo do modelo IPH II. XXII Congreso Latinoamericano de Hidráulica, Guayana, Venezuela, out. 2006, 1 CD.
TUCCI, C.E.M. Modelos hidrológicos. ABRH Editora da U-FRGS. Porto Alegre. 669 p., 1998.
VINK, K., SCHOT, P. Multiple-objective optimization of drinking water production strategies using a genetic algo-rithm. Water Resources Research, v 38, n 9, 20, 2002.
VRUGT, J.A.; GUPTA, H.V.; BOUTEN, W.; SOROOSHIAN, S. A Shuffled Complex Evolution Metropolis algorithm for optimization and uncertainty assessment of hy-drologic model parameters. Water Resourc. Res, v 39, n 8. 2003.
WAGENER, T.; WHEATER, H.; GUPTA, H.V. Rainfall-Runoff modeling in gauged and ungauged catchments. Im-perial College Press. 306 p., 2004.
YAPO, P.O.; GUPTA, H.V.; SOROOSHIAN, S. Multiobjective global optimization for hydrologic models. Journal of Hydrology, v 204, p. 83-97, 1998.
YEH, C.H., LABADIE, J.W. Multiobjective watershed-level planning of storm water detention systems. Journal of Water Resources Planning and Management, v 123, n 6, p. 336-343, 1997.
ZITZLER, E.; THIELE, L. Multiobjective Evolutionary Algo-rithms: A Comparative Case Study and the Strength Pareto Approach. IEEE Trans. on Evol. Comput., v 3, n 4, p. 257-271, 1999.
Verification of the Efficiency and Efficacy of a Multi-Objective Evolutionary Algorithm in the Automatic Calibration of the IPH II Hydrological Model ABSTRACT
The complex processes of the hydrological cycle can be represented through hydrological modeling, being the models that simulate the rainfall-runoff process the most

Verificação da Eficiência e Eficácia de um Algoritmo Evolucionário Multi-objetivo na Calibração Automática do Modelo Hidrológico IPH II
50
used of them. These models are based in mathematical equations that describe, in a simplified way, the hydrologi-cal behavior of the basin and possess parameters that must be defined through a process of calibration. The manual calibration, by trial and error, can be a tedious task, espe-cially when the model's user is inexperienced. The automat-ic calibration, however, utilizes numerical optimization techniques based in the intensive use of computers. This study presents a multi-objective evolutionary algorithm of optimization developed by Vrugt et al. (2003) and applied in the automatic calibration of the IPH II hydrological model. The obtained results are encouraging: the algorithm produced a uniform approach of the Pareto Front in all the different tests carried out, keeping well represented its ex-tremities. Additionally this method displayed some advan-tages over another multi-objective evolutionary algorithm currently used for the automatic calibration of the IPH II hydrological model. Keywords: automatic calibration, evolutionary algorithm, hydrological modeling, MOSCEM-UA, IPH II