Embed Size (px)
Citation preview
Centro Universitário Salesiano de São Paulo
Larissa Cristina
Larissa Renier
Larissa D’Avila
Rafael Araujo
Tatiane Portugal Mendes
Vetores
Lorena
2015
Trabalho apresentado como exigência parcial para obtenção de nota em Álgebra Linear e Geometria no curso de Engenharia Elétrica/Eletrônica no Centro Universitário Salesiano. Orientador: Prof. Benedito Manuel Almeida.
Sumário
Introdução....................................................................................................................5
1- Definições.............................................................................................................6
1.3 – Cálculo com Vetores – Subtração de Vetores..................................................10
1.4 – Cálculo com Vetores – Produto de um número por Vetores.............................10
1.5 – Vetor Oposto.....................................................................................................11
1.6- Decomposição de Vetores..................................................................................12
1.7- Adição de mais de dois vetores (método do polígono).......................................12
1.8 – Vetor soma de mais de dois vetores.................................................................14
2 – Aplicações...........................................................................................................15
2.1- Campo Elétrico...................................................................................................15
2.1.1- Principio da superposição................................................................................16
2.2 – Flechas Linhas de transmissão........................................................................17
2.3 – Campo Magnético.............................................................................................21
2.4 – Mecânica dos Sólidos.......................................................................................22
2.4 – Química............................................................................................................23
CONCLUSÃO............................................................................................................28
BIBIOGRAFIA............................................................................................................29
Introdução
Nos dias de hoje, o mercado de trabalho exige cada vez mais dos
engenheiros, fazendo com que os estudantes se empenhem mais a suprir essa
necessidade. Uma dúvida frequentemente dos estudantes de engenharia é a prática
do aprendem teoricamente, se tudo o que aprendem terá utilidade pratica na sua
futura profissão e se tiver, qual a sua finalidade? E os vetores estão dentre essas
dúvidas, aprendemos em sala de aula a sua parte teórica, porém, qual a sua
importância pratica?
Este trabalho busca justificar mostrando ao leitor a importância dos conceitos
e aplicações dos vetores no curso de engenharia elétrica e eletrônica, para poder
aplica-lo em sua prática com base nos estudos feitos durante o curso.
Nossos objetivos específicos são trabalhar os conceitos de vetores e aplica-
los na engenharia elétrica.
Temos como referencial teórico o autor Paulo Winterle, o qual apresenta um
livro cujo realce está em suas qualidades didáticas englobando assuntos como:
vetores, produto escalar, vetorial.
Cronograma:
12/03/2015 – Entrega do projeto;
15/04/2015 – Entrega dos relatórios;
13/05/2015 – Primeira entrega do relatório final;
20/05/2015 – Apresentação e entrega final do relatório.
1- Definições
O que é Vetor? Vetor é um substantivo masculino que significa condutor ou
portador.
A palavra vetor pode ter diferentes acepções, dependendo da área do
conhecimento em que é empregada. Abaixo algumas áreas e o seu devido
significado.
Na Física, vetor é toda grandeza que só fica inteiramente determinada quando é
dado um número real que a mede numa dada unidade, uma direção e um sentido.
Em Geometria, vetor é um raio que vai do foco ou de um dos focos de uma curva
a qualquer ponto da mesma curva.
Na matemática, na área de Cálculo Vetorial, vetor é o segmento de reta
orientado. É o conjunto de n quantidades que dependem de um sistema de
coordenadas n-dimensionais e que se transformam segundo leis bem determinadas
quando se muda o sistema.
Em Astronomia, vetor é um raio que indica a distancia variável do centro do Sol
ao centro de um planeta.
Na área militar, vetor faz referência a um veículo que transporta carga explosiva
mais especificamente nuclear.
Porém nosso objetivo principal é a utilização dos vetores no curso de Engenharia
Elétrica.
Vetor, como já dissemos, é um instrumentos usado, principalmente pela física,
que reúne "dentro de si" três informações sobre um corpo ou um móvel.
MÓDULO (intensidade, número real não-numérico)
SENTIDO
DIREÇÃO
Os vetores são representados por qualquer letra e por uma seta desenhada por
sida da letra, como . O módulo deste vetor é representado pela letra que
representa o vetor, porém sem a seta em cima, v, ou então pelo símbolo do vetor
entre os sinais matemáticos que representam módulo, | |.
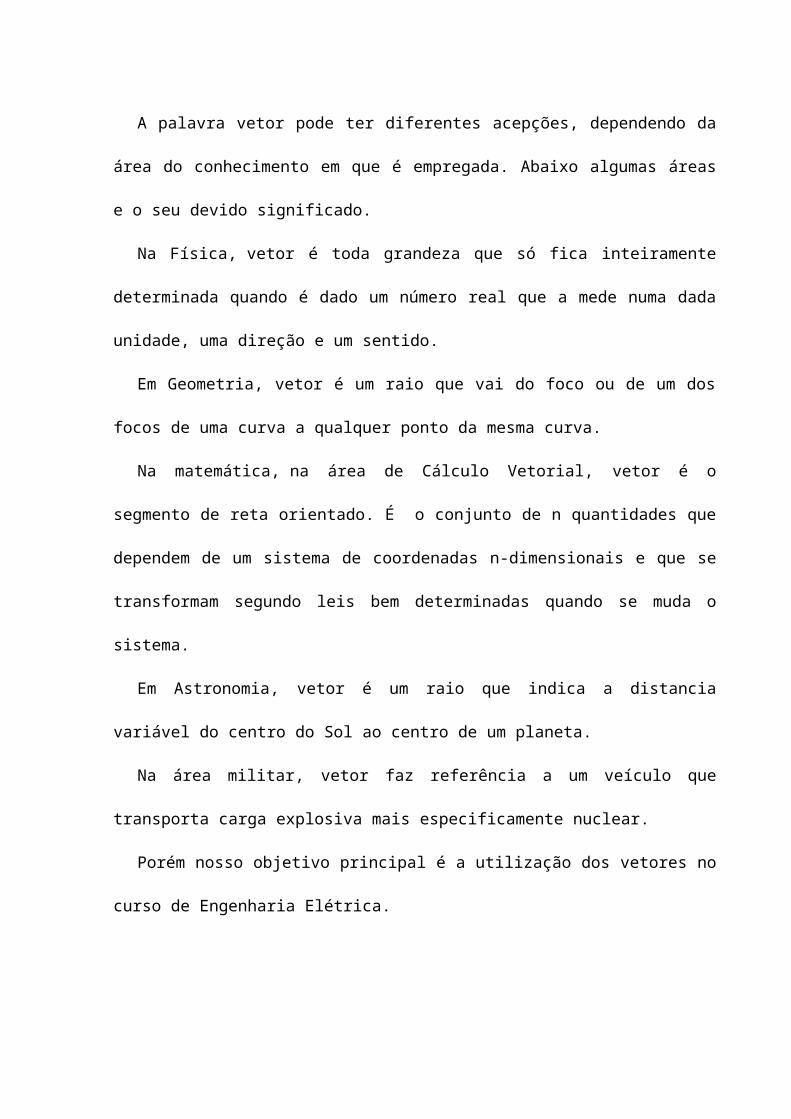
Para facilitar a nossa compreensão vamos pegar um exemplo simples
Neste exemplo tempos um vetor que possui todas as informações
necessárias. veja:
Direção: como vemos, o vetor acima possui a mesma direção da reta r,
horizontal;
Sentido: Fica notável que o vetor segue de P para O, da esquerda para
direita, neste caso;
Módulo: O módulo é a intensidade do vetor, como já sabemos. O módulo é,
graficamente representado, pelo tamanho do vetor desenhado, que em
nossa caso é de três unidades de medidas u, ou seja 3u.
OBS.: Devemos sempre notar que se a unidade de medida fosse centímetros,
o módulo do vetor seria 3 cm, e se a unidade de medida fosse metros, o
módulo do vetor possuiria 3 metros, etc.
Agora, possuímos todo o conhecimento necessário para retornar àquela história
e dela tirar todas as informações do vetor que representa o carro visto. Então
entendemos como:
As informações do vetor são:
Sentido: Sentido centro de São Paulo.
Direção: A mesma direção da Av. Rebouças.
Módulo: Aproximadamente 190 km/h.
1.1 – Vetores iguais e Vetores diferentes
Este é outro item muito importante para entendermos, definitivamente, um
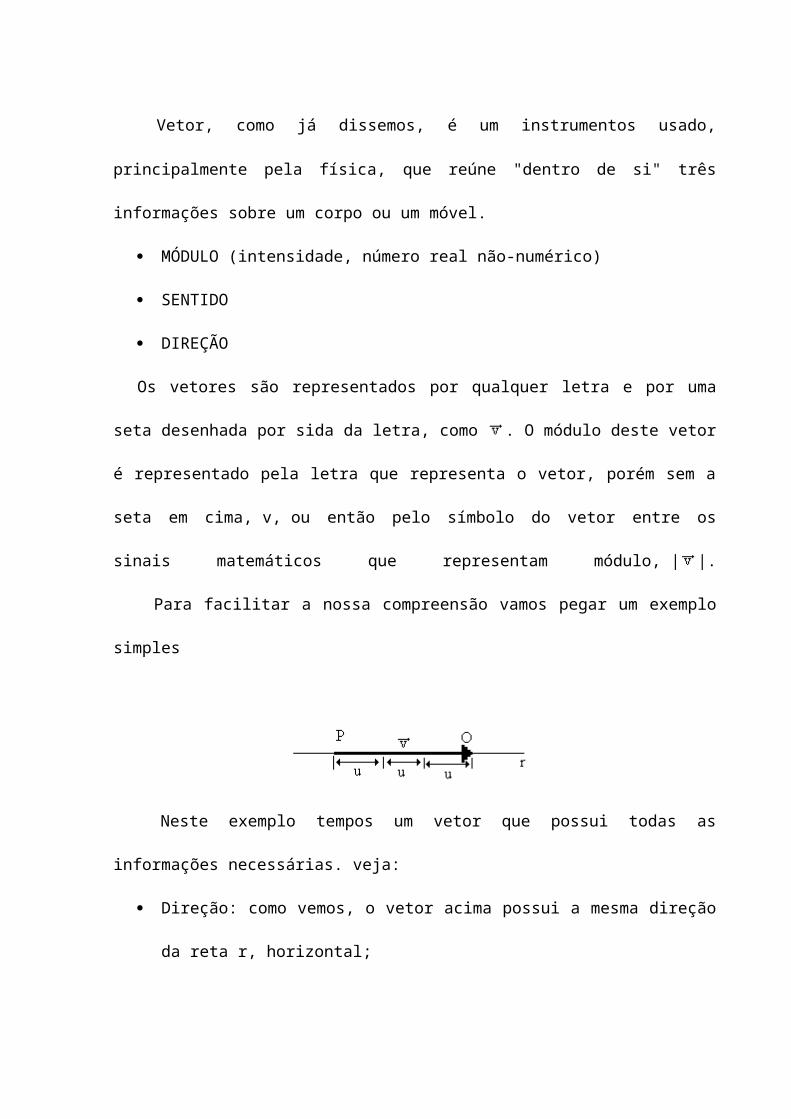
vetor. Para que dois vetores sejam iguais eles, necessariamente, precisam possuir
módulos, sentidos e direção iguais. Por exemplo:
Os vetores acima são iguais, pois possuem as três informações, que constitui
um vetor, iguais.
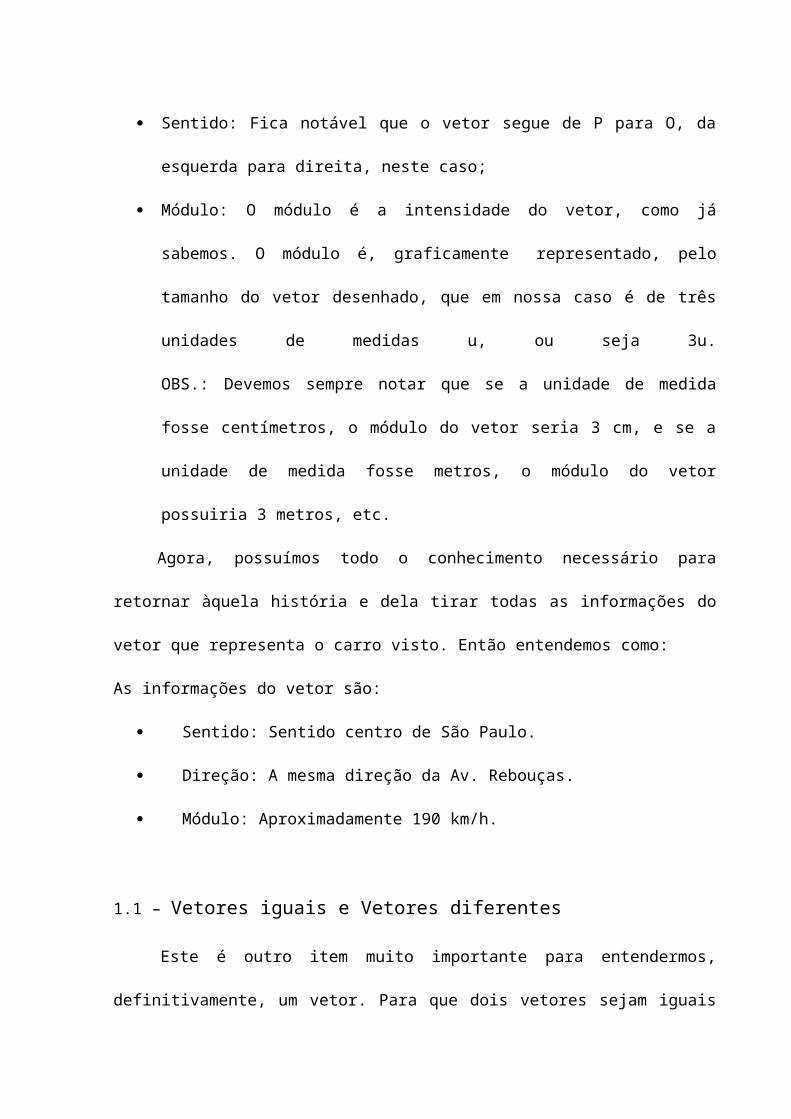
Se tivermos dois vetores que possuem módulos e direções iguais, porém
sentidos diferentes, dizemos que estes vetores são diferentes e opostos. Por
exemplo:
Estes dois vetores são diferentes, pois possuem a mesma direção
(horizontal), o mesmo módulo, porém o sentido contrário e opostos.
1.2 – Cálculo com Vetores – Adição de Vetores
Quando executamos uma operação com vetores, chamados o seu resultado
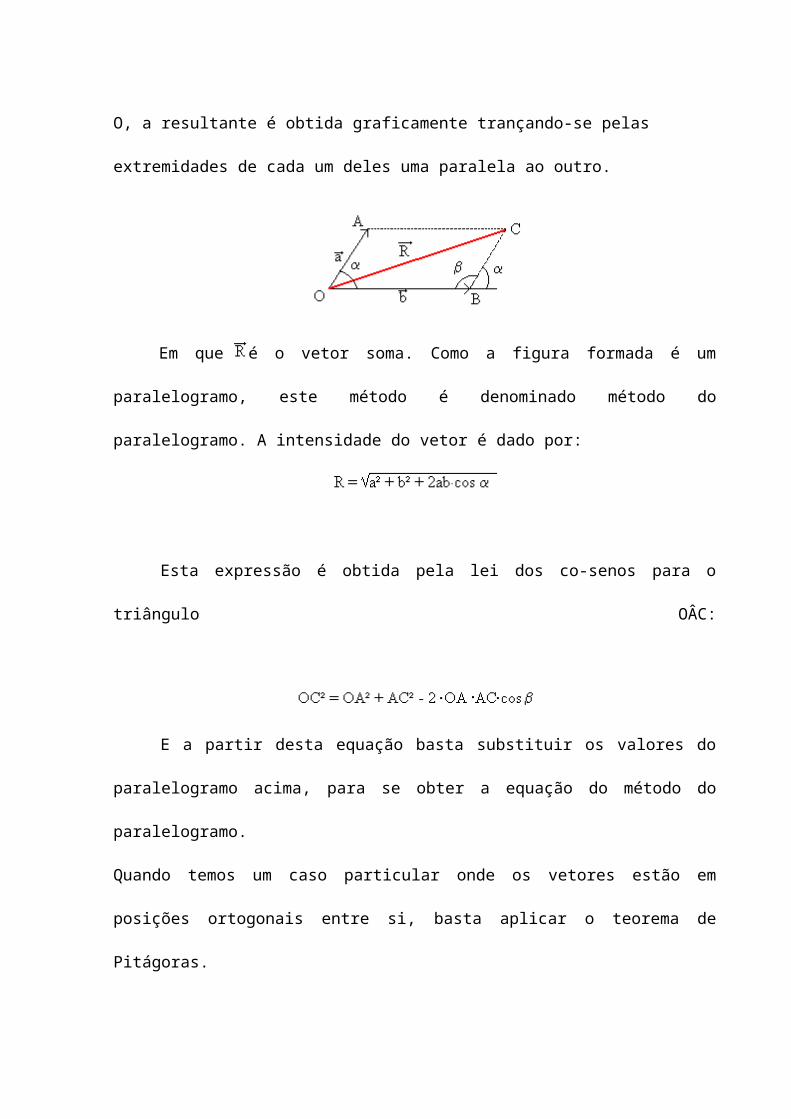
de resultante . Dado dois vetores = A - O e = B - O, a resultante é obtida
graficamente trançando-se pelas extremidades de cada um deles uma paralela ao
outro.
Em que é o vetor soma. Como a figura formada é um paralelogramo, este
método é denominado método do paralelogramo. A intensidade do vetor é dado por:
Esta expressão é obtida pela lei dos co-senos para o triângulo OÂC:
E a partir desta equação basta substituir os valores do paralelogramo acima,
para se obter a equação do método do paralelogramo.
Quando temos um caso particular onde os vetores estão em posições ortogonais
entre si, basta aplicar o teorema de Pitágoras.
1.3 – Cálculo com Vetores – Subtração de Vetores
Dados dois vetores = A - O e = B - O, o vetor resultante é dado por =
- = (A - O) - (B - O) = A - O - B + O; = A - B, onde A é a extremidade e B é a
origem.
Analiticamente o vetor é dado por:
Módulo:
Direção: da reta AB
Sentido: de B para A
Se tivéssemos efetuado = A - B, o sentido seria de A para B e o módulo seria o
mesmo.
1.4 – Cálculo com Vetores – Produto de um número por Vetores
O produto de um número a por um vetor , resultará em um outro vetor
dado por:
Módulo: | | = a ·
Direção: A mesma de ;
Sentido: 1) se a > 0 - o mesmo sentido de
2) se a < 0 - contrário de .
1.5 – Vetor Oposto
Antes de entrarmos em outra parte importante do estudo de vetor, precisamos
entender o que é um vetor oposto. Denomina-se vetor oposto de um vetor , o
vetor com as seguintes características:
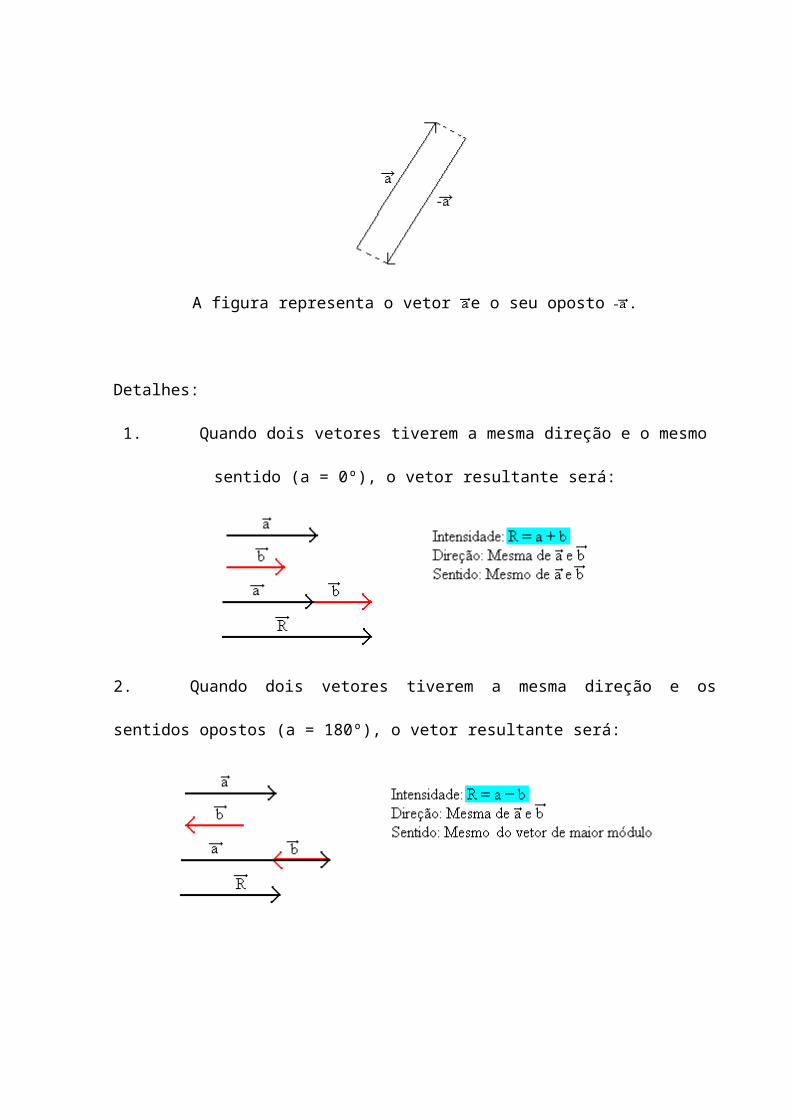
A figura representa o vetor e o seu oposto .
Detalhes:
1. Quando dois vetores tiverem a mesma direção e o mesmo sentido (a = 0º), o
vetor resultante será:
2. Quando dois vetores tiverem a mesma direção e os sentidos opostos (a =
180º), o vetor resultante será:

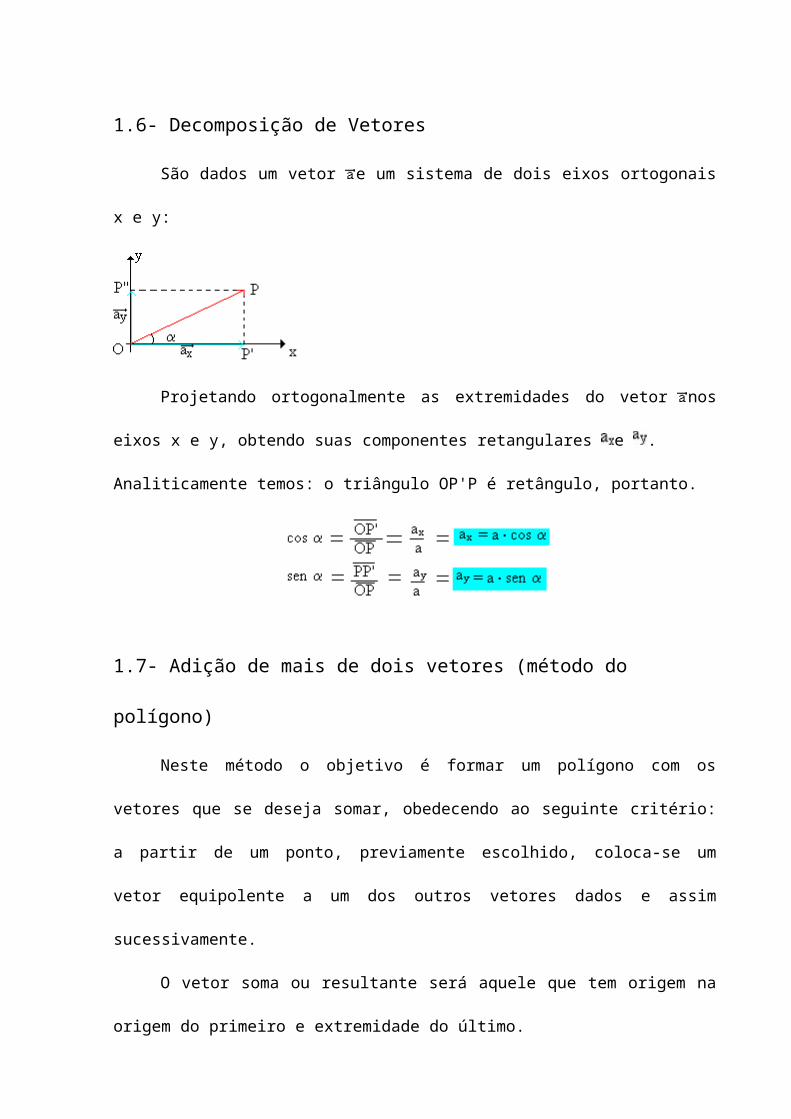
1.6- Decomposição de Vetores
São dados um vetor e um sistema de dois eixos ortogonais x e y:
Projetando ortogonalmente as extremidades do vetor nos eixos x e y,
obtendo suas componentes retangulares e .
Analiticamente temos: o triângulo OP'P é retângulo, portanto.
1.7- Adição de mais de dois vetores (método do polígono)
Neste método o objetivo é formar um polígono com os vetores que se deseja
somar, obedecendo ao seguinte critério: a partir de um ponto, previamente
escolhido, coloca-se um vetor equipolente a um dos outros vetores dados e assim
sucessivamente.
O vetor soma ou resultante será aquele que tem origem na origem do primeiro
e extremidade do último.
Vetor equipolente é um vetor que tem o mesmo módulo, a mesma direção e o
mesmo sentido que o vetor considerado. Exemplo: Determinar o vetor soma dos
vetores abaixo.
Resolução: Fixando o ponto O arbitrariamente
Notamos:
· Quando a extremidade do último vetor coincidir com a origem do primeiro,
isto é, quando o polígono for fechado, o vetor resultante será nulo. (R = 0)
· Em qualquer ordem de colocação dos vetores, o vetor Resultante terá o
mesmo módulo.
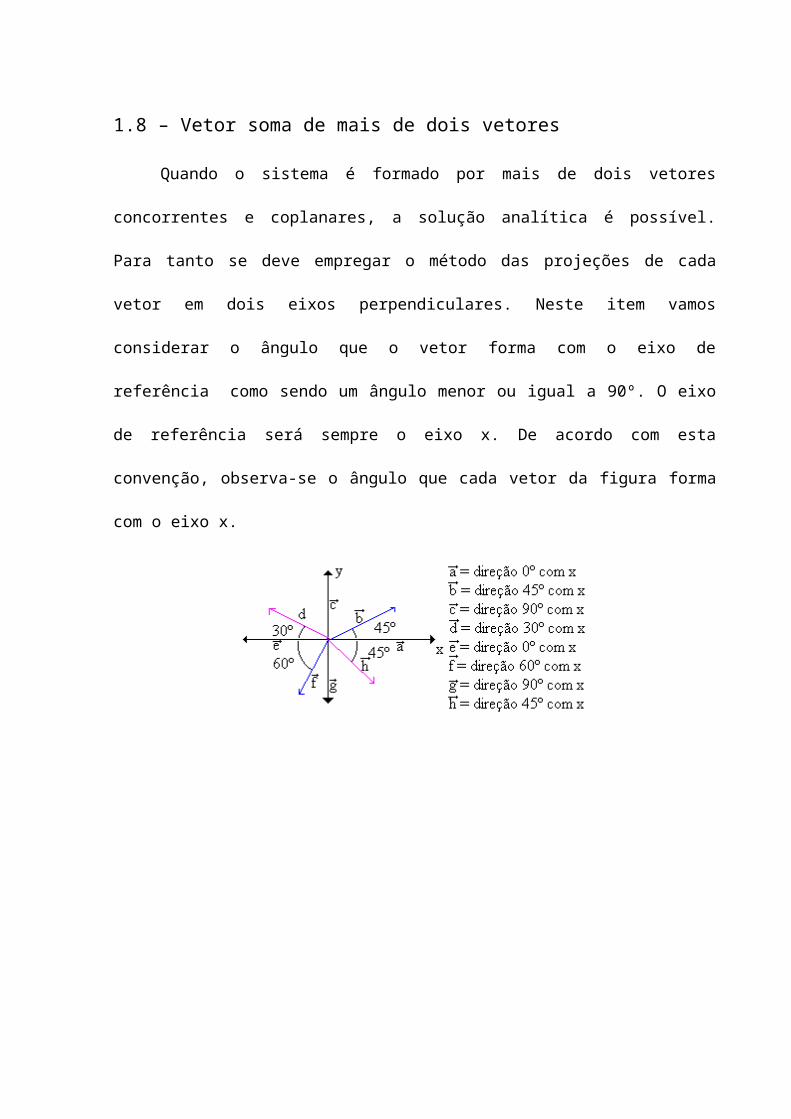
1.8 – Vetor soma de mais de dois vetores
Quando o sistema é formado por mais de dois vetores concorrentes e
coplanares, a solução analítica é possível. Para tanto se deve empregar o método
das projeções de cada vetor em dois eixos perpendiculares. Neste item vamos
considerar o ângulo que o vetor forma com o eixo de referência como sendo um
ângulo menor ou igual a 90º. O eixo de referência será sempre o eixo x. De acordo
com esta convenção, observa-se o ângulo que cada vetor da figura forma com o
eixo x.
2 – Aplicações
Agora, após definirmos o que são vetores e seus cálculos veremos qual a sua
utilidade em algumas matérias do Curso de Engenharia Elétrica.
2.1- Campo Elétrico
Um campo elétrico é o campo de força provocado pela ação de cargas
elétricas, (elétrons, prótons ou íons) ou por sistemas delas, em outras palavras,
Campo elétrico é a região ao redor de uma carga (positiva ou negativa), na qual, ao
se colocar um corpo eletrizado, este fica sujeito a uma força elétrica. As cargas
elétricas colocadas num campo elétrico estão sujeitas à ação de forças elétricas, de
atração e repulsão.
O campo elétrico em um ponto é uma grandeza vetorial, portanto é
representado por um vetor.
Campo elétrico gerado pela carga Q
Quando o campo elétrico é criado em uma carga positiva ele, por convenção,
terá um sentido de afastamento.
Quando o campo elétrico é criado em uma carga negativa ele, por convenção,
terá um sentido de aproximação.

Que fique claro que o sentido do campo elétrico depende exclusivamente do
sinal da carga elétrica.
A equação usada para se calcular a intensidade do vetor campo elétrico (E) é
dada pela relação entre a força elétrica (F) e a carga de prova (q):
Unidade no Sistema Internacional de Unidades:
Onde N é a unidade de força (Newton) e C a unidade de carga (Coulomb).
2.1.1- Principio da superposição
A força com a qual duas cargas interagem não é modificada pela presença de
uma terceira. Em outras palavras, se uma carga está em presença de outras cargas
elétricas, a força resultante sobre ela é a soma vetorial das forças exercidas por
cada uma das cargas em separado.
2.2 – Flechas Linhas de transmissão
Uma informação extremamente útil para uso em projetos de linhas de
transmissão é a flecha. Flecha é a distância vertical entre uma reta que liga os dois
pontos de fixação, ou seja, a corda e linha reta tangente à curva. Como mencionado
anteriormente, a flecha depende do comprimento do vão, da temperatura do cabo e
da tração aplicada ao cabo quando este é instalado.
A flecha pode ser calculada admitindo uma parábola (Primeira figura ) como a
função que define o eixo do cabo ou tomando-se a forma de uma catenária
( Segunda figura), que seria a melhor aproximação. Na prática, a utilização da
parábola ou invés da catenária conduz a pequenos erros quando o vão também é
pequeno. Por exemplo, menor que 450 metros.
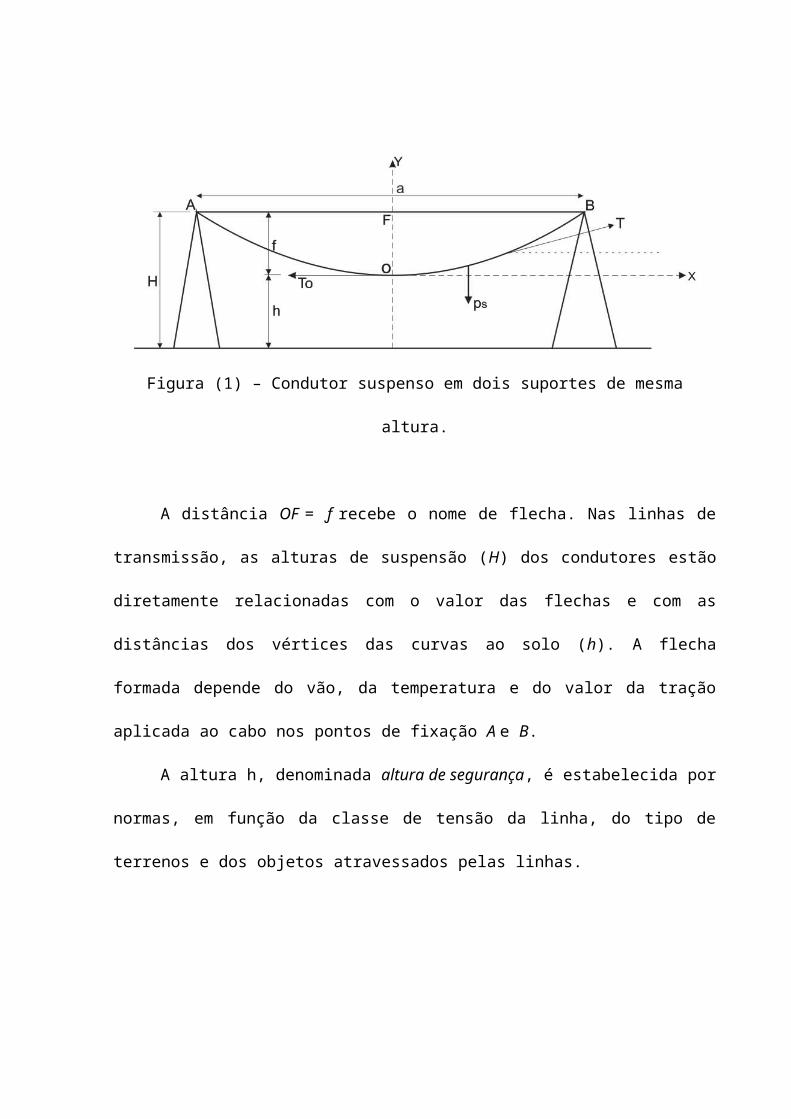
Considere a Figura (1), que representa um condutor suspenso em dois
suportes rígidos, A e B, separados entre si por uma distância a. Essa distância
comumente recebe o nome de vão. Como os pontos A e B estão a uma mesma
altura, a curva descrita pelo condutor será simétrica, e seu ponto mais baixo, o
vértice O, encontra-se sobre um eixo a meia-distância entre A e B.
Figura (1) – Condutor suspenso em dois suportes de mesma altura.
A distância OF = ƒ recebe o nome de flecha. Nas linhas de transmissão, as
alturas de suspensão (H) dos condutores estão diretamente relacionadas com o
valor das flechas e com as distâncias dos vértices das curvas ao solo (h). A flecha
formada depende do vão, da temperatura e do valor da tração aplicada ao cabo nos
pontos de fixação A e B.
A altura h, denominada altura de segurança, é estabelecida por normas, em
função da classe de tensão da linha, do tipo de terrenos e dos objetos atravessados
pelas linhas.

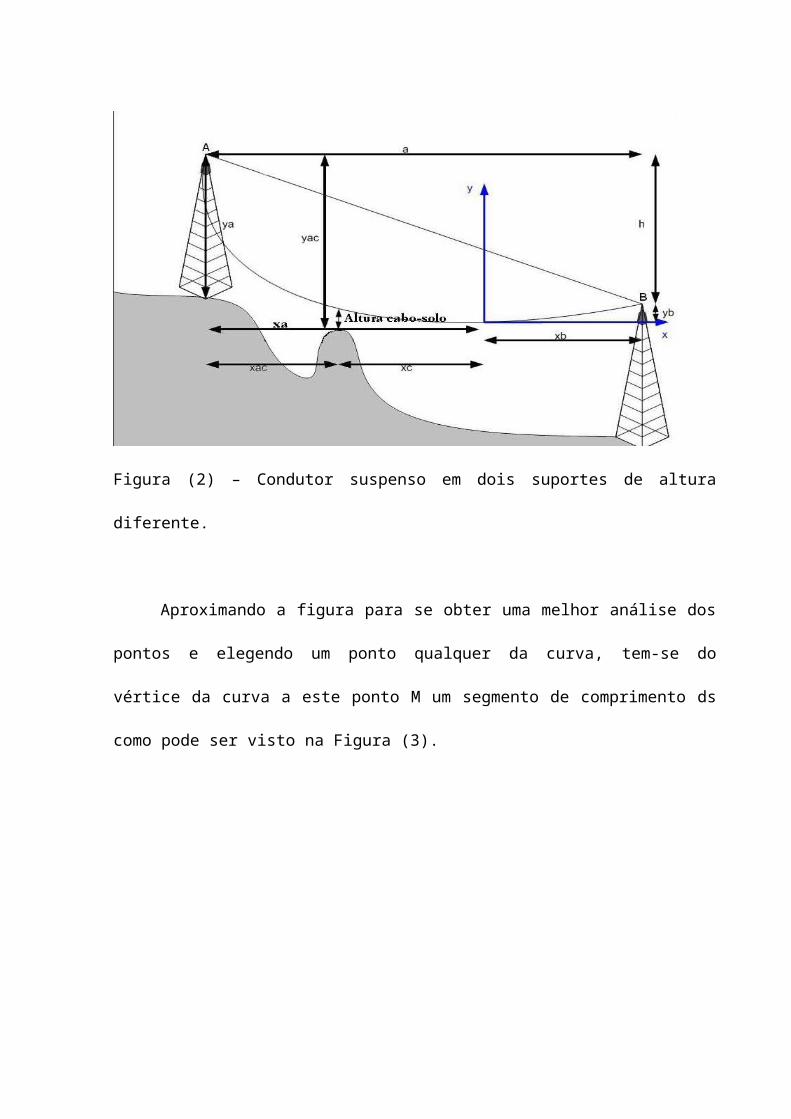
Figura (2) – Condutor suspenso em dois suportes de altura diferente.
Aproximando a figura para se obter uma melhor análise dos pontos e
elegendo um ponto qualquer da curva, tem-se do vértice da curva a este ponto M um
segmento de comprimento ds como pode ser visto na Figura (3).
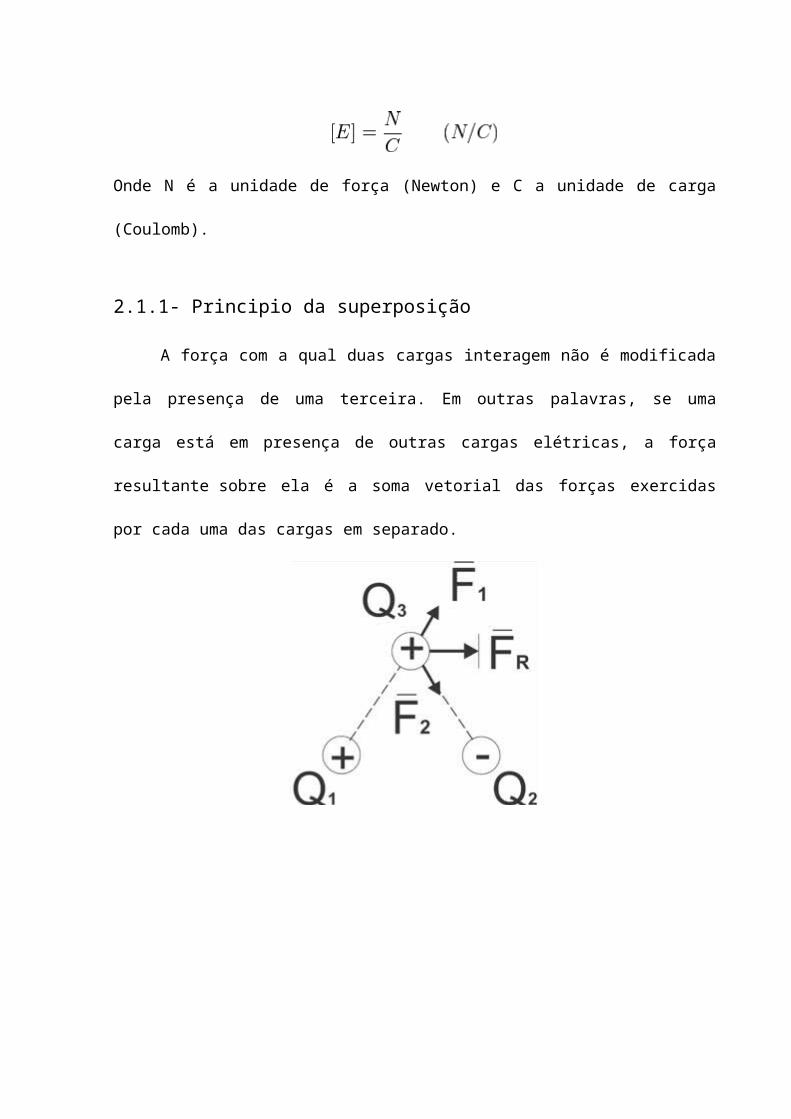
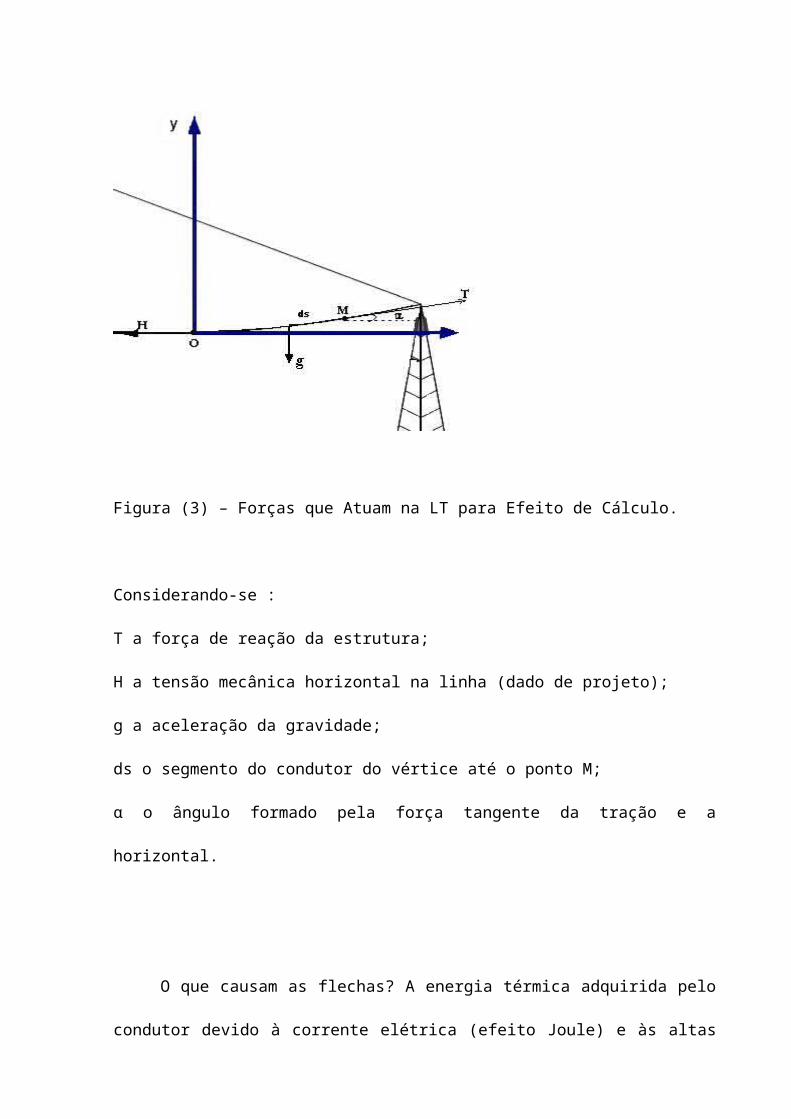
Figura (3) – Forças que Atuam na LT para Efeito de Cálculo.
Considerando-se :
T a força de reação da estrutura;
H a tensão mecânica horizontal na linha (dado de projeto);
g a aceleração da gravidade;
ds o segmento do condutor do vértice até o ponto M;
α o ângulo formado pela força tangente da tração e a horizontal.
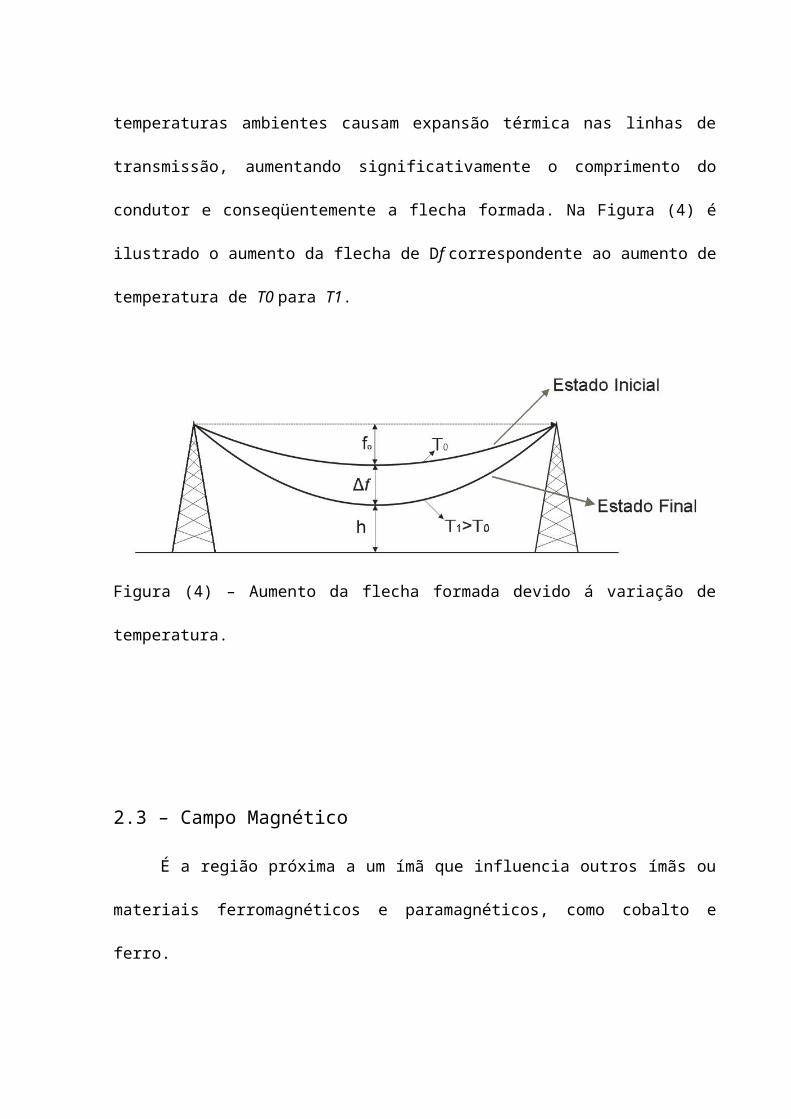
O que causam as flechas? A energia térmica adquirida pelo condutor devido à
corrente elétrica (efeito Joule) e às altas temperaturas ambientes causam expansão
térmica nas linhas de transmissão, aumentando significativamente o comprimento do
condutor e conseqüentemente a flecha formada. Na Figura (4) é ilustrado o aumento
da flecha de Df correspondente ao aumento de temperatura de T0 para T1.
Figura (4) – Aumento da flecha formada devido á variação de temperatura.
2.3 – Campo Magnético
É a região próxima a um ímã que influencia outros ímãs ou materiais
ferromagnéticos e paramagnéticos, como cobalto e ferro.
Compare campo magnético com campo gravitacional ou campo elétrico e
verá que todos estes têm as características equivalentes.
Também é possível definir um vetor que descreva este campo, chamado vetor
indução magnética e simbolizado por . Se pudermos colocar uma pequena bússola
em um ponto sob ação do campo o vetor terá direção da reta em que a agulha se
alinha e sentido para onde aponta o polo norte magnético da agulha.
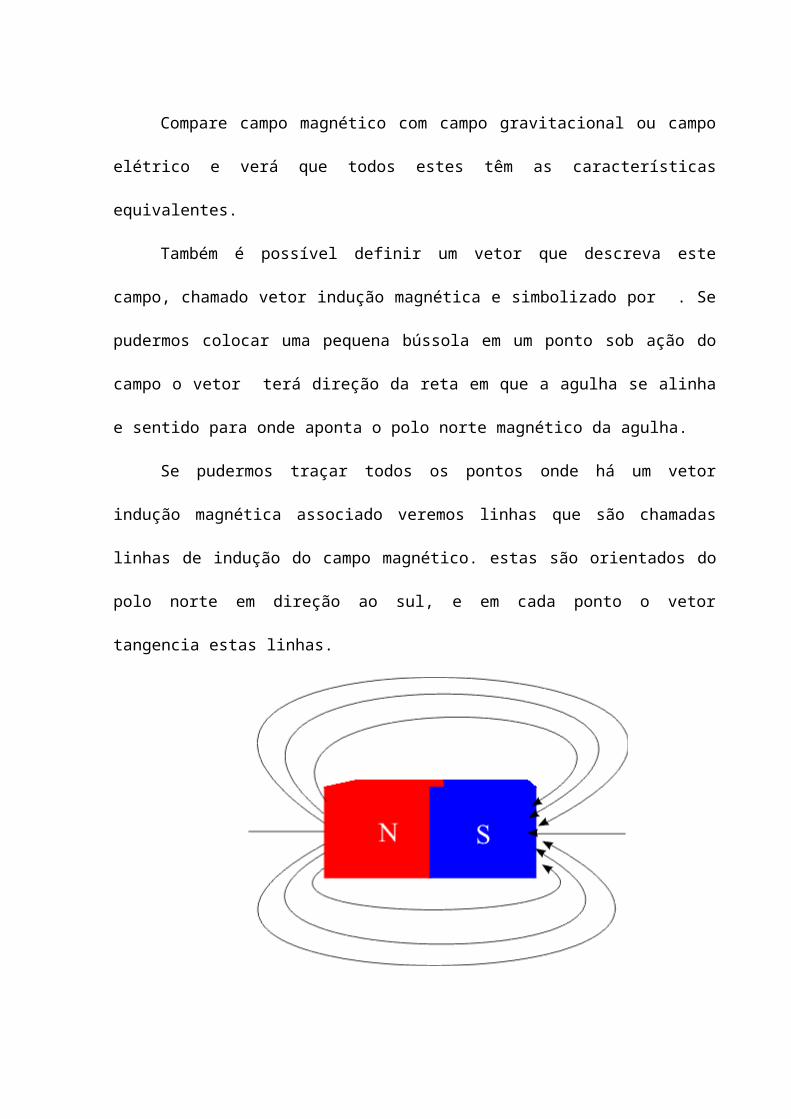
Se pudermos traçar todos os pontos onde há um vetor indução magnética
associado veremos linhas que são chamadas linhas de indução do campo
magnético. estas são orientados do polo norte em direção ao sul, e em cada ponto o
vetor tangencia estas linhas.
As linhas de indução existem também no interior do ímã, portanto são linhas
fechadas e sua orientação interna é do polo sul ao polo norte. Assim como as linhas
de força, as linhas de indução não podem se cruzar e são mais densas onde o
campo é mais intenso.
2.4 – Mecânica dos Sólidos
O produto vetorial de dois vetores P e Q é definido como sendo o vetor V que
satisfaça as condições:
A linha de ação V é perpendicular ao plano que contem P e Q
A intensidade de V e o produto das intensidades de P e Q e do sen do
ângulo formado por P e Q e que seja: V= PQ.sen
O sentido de V é determinado pela regra da mão direita.
Determinaremos ps produtos vetoriais de quaisquer dois vetores i, j e k.
Considerando primeiramente o produto i x j veremos que esse produto deve ser k já
que os vetores i, j e k são mutuamente ortogonais e formam um triedro positivo. Por
outro lado, o produto j x i será igual a –k pois a rotação de 90 graus que traz j a i é
observada como anti horária. Deve ser observado que o produto vetorial de um vetor
unitário, tal como i x i e zero, pois os vetores tem a mesma direção.
Os produtos dos pares possíveis de vetores são:
I x i = 0
I x j = k
I x k = -j
J x i= -k
J x j = 0
J x k= i
K x i= -k
K x j= -i
K x k= 0
O produto vetorial dos vetores P= x1i + y1j + z1k e Q= x2i + y2j + z2k e igual a: P x
Q= (y1z2 – z1y2) i + (z1x2 – z2x1) j + (x1y2 – y1x2) k
2.4 – Química
Dada uma ligação covalente (A─B) podemos ter dois casos:
a) A e B apresentam a mesma eletronegatividade. A ligação é chamada covalente
apolar
Exemplo:
F─F; O═O; Cl─Cl
b) A e B tem eletronegatividades diferentes.
Exemplo:
H─F; H─O─; H─Cl
Considere as moléculas H2 e HF:
H – H e δ+H – Fδ-
Na molécula H2, o par de elétrons é compartilhado igualmente pelos dois
átomos. Na molécula HF é compartilhado desigualmente, aparecendo no lado
do flúor uma pequena carga formal negativa, enquanto no lado
do hidrogênio aparece uma carga formal positiva. A molécula de HF é dipolo,
definindo-se momento dipolar a grandeza μ= δ . d, sendo d a distância entre os dois
centros de cargas formais.
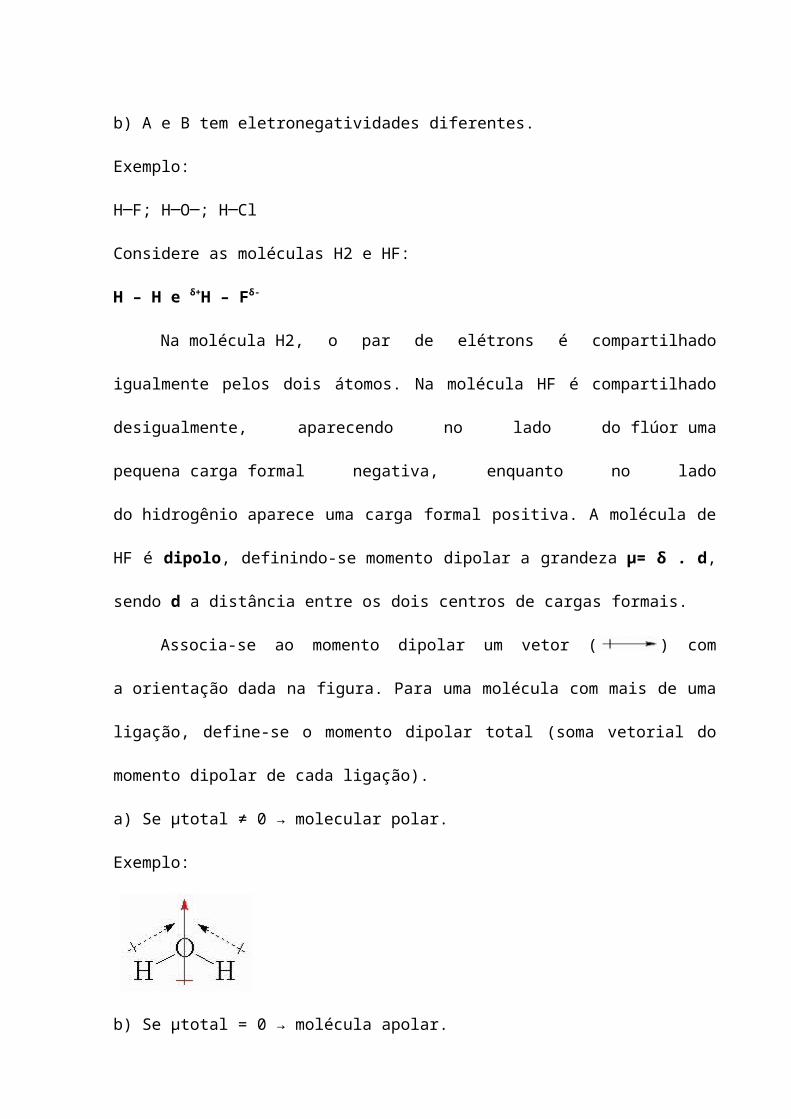
Associa-se ao momento dipolar um vetor ( ) com a orientação dada na
figura. Para uma molécula com mais de uma ligação, define-se o momento dipolar
total (soma vetorial do momento dipolar de cada ligação).
a) Se μtotal ≠ 0 → molecular polar.
Exemplo:
b) Se μtotal = 0 → molécula apolar.
Exemplo:
Considere que o vetor momento de dipolo ( ) represente a polaridade de
uma ligação química. É importante chamar a atenção de que a polaridade de uma
ligação ou molécula não pode ser medida; apenas o momento de dipolo é
mensurável. Como uma entidade vetorial, é caracterizado pelo seu módulo,
direção e sentido.
Moléculas diatômicas heteronucleares são moléculas polares e possuem
não nulo. Já as moléculas diatômicas homonucleares são apolares, pois exibem =
0.
A polaridade de moléculas tri e poliatômicas depende da soma vetorial dos
vetores individuais. Essa soma vetorial só pode ser feita após a determinação
da geometria molecular.
As moléculas CO2 (geometria linear), BF3 (geometria triangular ou trigonal
plana) e CCl4 (geometria tetraédrica) são apolares. Na figura 2 essas moléculas, os
momentos de dipolo individuais são cancelados mutuamente em virtude das
geometrias moleculares, fazendo com que o vetor momento de dipolo resultante,
, tenha módulo igual a zero. Uma molécula apolar é caracterizada por .
Por causa das geometrias moleculares, muitos ânions poliatômicos
(moléculas com carga negativa) são apolares, apesar de formarem compostos
iônicos com cátions, como: NO3-, SO4
2-, PO43-...
Nas moléculas de H2O, NF3 e CHCl3 (clorofórmio), os momentos de dipolo das
ligações não se anulam e as moléculas são ditas polares, já que (momento
que o dipolo resultante é diferente de zero) (Figura 3).
Considere três tipos de grandeza como funções contínuas do espaço
tridimensional R 3 (elas também podem ser função do tempo, mas a dependencia
temporal é irrelevante para as considerações desta seção com coordenadas
cartesianas r = (x, y, z) cujos vetores unitários canonicos são (ex, ey, ez): φ = φ(x, y,
z), v = v(x, y, z), T = T(x, y, z). (1.3)
φ é um escalar, ou seja, é definido por uma componente apenas, é um vetor
no espaço R 3 , e T é uma matriz 3 × 3 (também chamada de tensor de ordem 2 no
espaço R 3) com nove componentes.
O produto vetorial entre dois vetores u e v tem como resultado um vetor w
cujas componentes são dadas em coordenadas cartesianas em termos das
componentes de u e v por: w = u × v = (uyvz − uzvy, uzvx − uxvz, uxvy − uyvx)
O módulo de w é igual a area do paralelogramo cujos lados são os vetores u
e v. A direção de w é perpendicular ao plano definido por u e v, e o sentido é dado
pela regra da mão direita. Por definição, u × v = −v × u. Note também que a
expressão pode ser calculada como o determinante:
w = u × v = ex ey ez ux uy uz vx vy vz
Suponha que um corpo no instante t = t0 ocupa uma certa região do espaço.
A posição espacial de uma partícula pode ser descrita pelo vetor X, medido a partir
de um ponto fixo. Seja x o vetor posição da partícula no instante t. Então, temos x =
x(X,t) com x(X,t0) = X (1.1) e essas equações descrevem o caminho de qualquer
partícula que em t = t0 está na posição X (diferentes X's para diferentes partículas).
A terna (X1,X2,X3) serve para identificar as diferentes partículas do corpo e é
conhecida como coordenada material.

CONCLUSÃO
Concluímos que a pergunta realizada anteriormente fora obtida com êxito,
visto que abrangemos de forma incisiva e teórica não só na teoria, mas também as
suas aplicações práticas.
BIBIOGRAFIA
http://bdm.unb.br/bitstream/10483/4172/1/2012_NeilMartinsdaSilva.pdf
http://www.ufjf.br/ppee/files/2008/12/211049.pdf
http://pt.wikipedia.org/wiki/Campo_el%C3%A9trico
http://www.infoescola.com/fisica/campo-eletrico/
http://www.brasilescola.com/fisica/campo-eletrico.htm
http://educacao.globo.com/fisica/assunto/eletromagnetismo/forca-eletrica-e-campo-
eletrico.html
http://www.cefetsp.br/edu/okamura/vetores_resumo_teorico.htm





























