Embed Size (px)
Citation preview

VI Seminário da Pós-graduação em Engenharia Mecânica
EVOLUÇÃO DA MODELAGEM MATEMÁTICA DE UM SISTEMA PENDULAR, EXCITADO POR UMA FONTE DE ENERGIA DE POTÊNCIA
LIMITADA
Carlos Eduardo Marques Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru
Prof. Dr. José Manoel Balthazar
Orientador – Depto de Estatística, Matemática Aplicada e Computacional – Unesp – Rio Claro
RESUMO
A proposta deste trabalho é a busca de uma modelagem matemática de um navio perfurador de petróleo que seja de simples manuseio, mas que contemple a maior gama de aspectos dinâmicos possível. Os modelos analisados e que serão discutidos nesse trabalho foram concebidos na forma de um pêndulo invertido de massa m e haste pendular de massa desprezível, l, fixado a uma plataforma suspensa de massa M, chamada de PPS (Plataforma Pendular Suspensa). O pêndulo é estabilizado por uma mola torcional não-linear, k1. A PPS sofre excitação por uma fonte de energia de potência limitada, ora descrita na forma de uma força harmônica, ora descrita como um circuito simplificado do tipo RLC com uma fonte de tensão harmônica. A parte elétrica do MED (Motor Eletrodinâmico) consiste de um resistor R , um indutor L , um condensador C e uma fonte de tensão senoidal, conectados em série. O acoplamento entre o PPS e o MED é através de uma força eletromagnética, devido a um ímã permanente, criando uma força de Laplace na parte mecânica e a tensão eletromotriz de Lenz na parte elétrica. PALAVRAS-CHAVE: Pêndulo Invertido, Vibrações Mecânicas, Não-Linearidades, Modelagem Matemática. 1. INTRODUÇÃO
Após o Primeiro Choque do Petróleo em 1973, países motivados pelo embargo do
óleo, aplicado pela OPEP, foram obrigados a desenvolver técnicas e equipamentos visando à extração e a exploração de petróleo em mar aberto (offshore), LOPES (2004), fazendo com que a engenharia naval fosse compelida a desenvolver navios petroleiros e navios perfuradores de petróleo, modelo exemplificado pela Figura 1.

VI Seminário da Pós-graduação em Engenharia Mecânica
Ao analisar os equipamentos instalados no navio perfurador, constatou-se que a plataforma da perfuratriz que está acoplada ao deck, apresenta características vibratórias que causam grandes prejuízos às companhias de petróleo, na forma de quebras de brocas, eixos e danos estruturais à torre de perfuração provenientes da fadiga do material, KOLADE (2009).
Sendo assim, em busca de uma melhor compreensão sobre o comportamento dinâmico envolvido na extração de petróleo efetuada por navios perfuradores, pesquisou-se modelos matemáticos que se baseiam em sistemas pendulares, invertidos ou não, mas que possuíssem características dinâmicas relevantes ao tema desta pesquisa, motivados inicialmente pelo trabalho de XU ET AL (2007). A partir daí, ao analisar as modelagens matemáticas propostas por LEE (2007) e DE PAULA ET AL (2011), percebe-se que mesmo não possuindo a mesma motivação de pesquisa, os modelos se relacionam, dadas as características dinâmicas destacadas pelos autores em seus respectivos trabalhos. Por fim, ao analisar as modelagens matemáticas propostas por BALTHAZAR ET AL (2010) e BALTHAZAR ET AL (2011), evidencia-se uma abordagem mais abrangente no que se refere aos aspectos dinâmicos envolvidos no problema em questão, o que serviu de motivação principal para MARQUES ET AL (2012-a) e MARQUES ET AL (2012-b).
Os modelos matemáticos adotados e estudados neste trabalho foram apresentados inicialmente em MARQUES ET AL (2012-a) e MARQUES ET AL (2012-b), e se concebem na forma de um sistema mono-pendular invertido, estabilizado por mola torcional não-linear, fixado em uma plataforma suspensa por uma mola e um amortecedor, chamada a partir de agora de PPS (Plataforma Pendular Suspensa), excitada por uma fonte de energia de potência limitada, apresentada ora na forma de uma força harmônica, MARQUES ET AL (2012-a), ora na forma de um circuito elétrico simplificado do tipo RCL com uma fonte de tensão harmônica, MARQUES ET AL (2012-b). As equações governantes dos sistemas são obtidas
Figura 1 – Planta de um modelo de navio perfurador de petróleo, FARINHA (2006): 1-entrada, 2-salva-vidas, 3-azimute propulsor, 4-ponte de comando, 5-heliporto, 6-instalações dos tripulantes tais como jacuzzi, ginásio, sala de conferências, sala de convívio, cabines, sala de vídeo/cinema, sala de refeições etc., 7-torre de perfuração, 8-andar técnico de perfuração,
9-laboratório, 10-guindaste, 11- zona dos tubos de perfuração, 12-zona de circulação das lamas provenientes da perfuração, 13-sala das máquinas, 14-furo retangular, (12x22m) de baixo da torre de perfuração, para lançamento dos tubos, 15-equipamento de perfuração
VI Seminário da Pós-graduação em Engenharia Mecânica
por meio da formulação de Lagrange. A análise é feita por meio de simulações numéricas obtidas com o auxílio do software Matlab.
2. MODELAGEM MATEMÁTICA
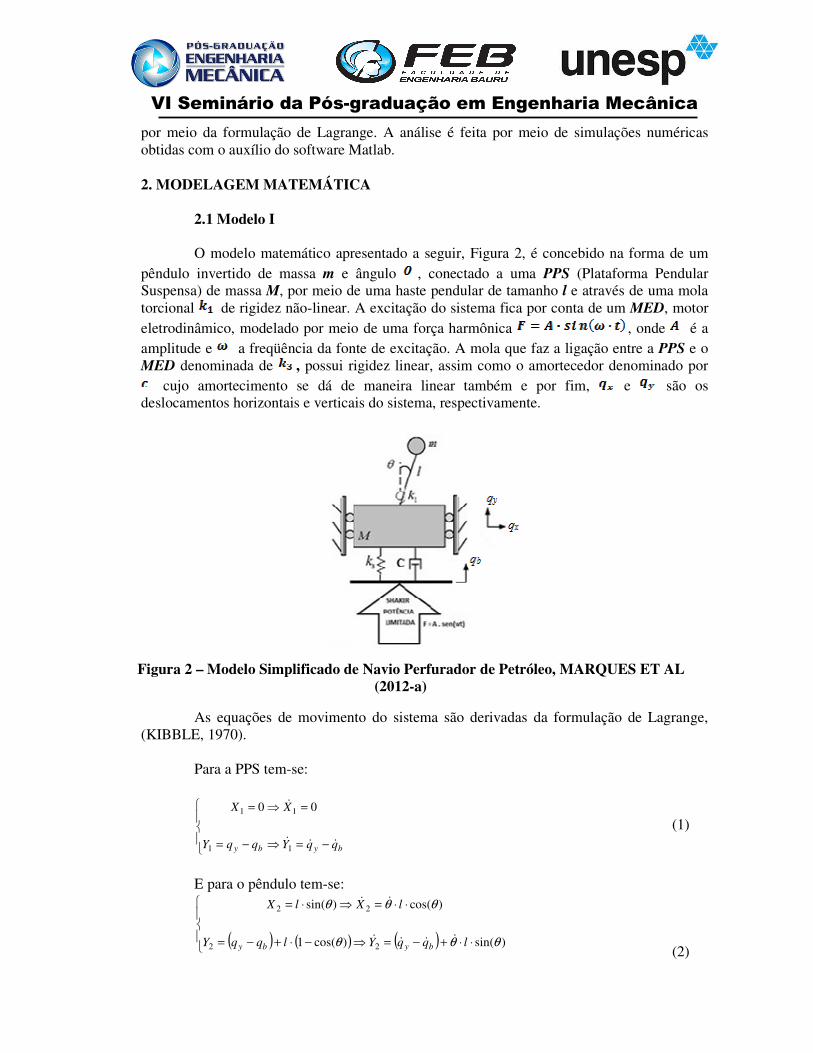
2.1 Modelo I O modelo matemático apresentado a seguir, Figura 2, é concebido na forma de um
pêndulo invertido de massa m e ângulo , conectado a uma PPS (Plataforma Pendular Suspensa) de massa M, por meio de uma haste pendular de tamanho l e através de uma mola torcional de rigidez não-linear. A excitação do sistema fica por conta de um MED, motor eletrodinâmico, modelado por meio de uma força harmônica , onde é a amplitude e a freqüência da fonte de excitação. A mola que faz a ligação entre a PPS e o MED denominada de , possui rigidez linear, assim como o amortecedor denominado por
cujo amortecimento se dá de maneira linear também e por fim, e são os deslocamentos horizontais e verticais do sistema, respectivamente.
As equações de movimento do sistema são derivadas da formulação de Lagrange, (KIBBLE, 1970).
Para a PPS tem-se:
−=⇒−=
=⇒=
byby qqYqqY
XX
&&&
&
11
11 00
(1)
E para o pêndulo tem-se:
( ) ( ) ( )
⋅⋅+−=⇒−⋅+−=
⋅⋅=⇒⋅=
)sin()cos(1
)cos()sin(
22
22
θθθ
θθθ
lqqYlqqY
lXlX
byby&&&&
&&
(2)
Figura 2 – Modelo Simplificado de Navio Perfurador de Petróleo, MARQUES ET AL (2012-a)

VI Seminário da Pós-graduação em Engenharia Mecânica
onde, )sin( tAqb ⋅⋅= ω e )cos( tAqb ⋅⋅⋅= ωω& (3) Determinados o referencial e as coordenadas generalizadas, busca-se calcular as
energias cinética (T) e potencial (V) do sistema, dessa forma, tem-se: Energia Cinética (T)
( ) ( )[ ]22
22
21
212
1YXmYXMT &&&& +⋅++⋅⋅=
(4)
( ) ( ) ( )+⋅⋅⋅⋅⋅+−⋅⋅⋅⋅+⋅+⋅+⋅= )cos()()(cos2
1)(
2
1 2222tAqmMtAmMqmMT yy ωωωω &&
( )( ) ( ))cos(sin
2
1 22tAqlmlm y ⋅⋅⋅−⋅⋅⋅⋅+⋅⋅⋅+ ωωθθθ &&&
(5) Energia Potencial (V)
212
12132
121 θ⋅⋅+⋅⋅+⋅⋅+⋅⋅= kYkYgmYgMV
(6)
( ) +⋅⋅⋅−⋅⋅+⋅⋅⋅⋅+⋅−⋅⋅+⋅=∴ )cos()sin()()( θω lgmlgmtAgmgMy
qgmgMV
( ) ( )( )tAy
qkktAky
qk ⋅⋅⋅⋅−⋅⋅+
⋅⋅⋅⋅+⋅⋅+ ωθω sin3
212
12sin232
1232
1
(7) A partir das energias do sistema, constrói-se a função Lagrangiana, L. As equações
governantes do movimento do sistema são derivadas da formulação de Lagrange.
( ) ( )+⋅⋅⋅⋅⋅+−
⋅⋅⋅⋅+⋅+⋅+⋅=−= )cos()()(2cos22
2
12)(2
1tA
yqmMtAmM
yqmMVTL ωωωω &&
( )( ) ( )+⋅⋅⋅⋅++⋅⋅+−
⋅⋅⋅−⋅⋅⋅⋅+⋅⋅⋅+ )sin()()()cos(sin22
2
1tAgmM
yqgmMtA
yqlmlm ωωωθθθ &&&
( ) ( )( )tAy
qkktAky
qklgmlgm ⋅⋅⋅⋅+⋅⋅−
⋅⋅⋅⋅−⋅⋅−⋅⋅⋅+⋅⋅− ωθωθ sin3
212
12sin232
1232
1)cos(
(8)
.,...,3,2,1,0)()(
ni
iq
D
iq
VT
iq
VT
dt
d==
∂
∂+
∂
−∂−
∂
−∂
&&
(9)
onde, ti
q
iq
∂
∂=&
, é a velocidade generalizada e D é a função de energia de dissipação de Rayleigh, tem-se:
( ) 22
122
1y
qclcD && ⋅⋅+⋅⋅⋅= θθ (10) Substituindo-se (8) e (10) em (9) e variando-se as coordenadas generalizadas do
sistema, obtêm-se as equações governantes do movimento do mesmo:

VI Seminário da Pós-graduação em Engenharia Mecânica
( )
( )
( ) ( )
⋅⋅−⋅⋅+
⋅⋅⋅−+⋅=
⋅−⋅+
⋅−⋅=
θ
θθ
θ
θ
2sin22
)sin(12
2sin)(
)sin(21
lmlmmM
lmfmMf
llmM
flf
yq
&&
&&
(11) onde,
( ) ( ) ( ) ( )y
qcy
qtAkgmMlmtAmMf && ⋅−
−⋅⋅⋅+⋅+−⋅⋅⋅−⋅⋅⋅⋅+−= ωθθωω sin3)cos(2sin2
1 e
( ) ( ) ( ) θθθθθωω &⋅⋅−⋅−⋅⋅⋅−⋅⋅⋅⋅⋅⋅−= 21sinsinsin2
2 lcklgmtAlmf.
2.1.1 Simulações Numéricas e Resultados do Modelo I Os parâmetros utilizados nas simulações estão identificados a seguir e estão de
acordo com BALTHAZAR ET AL (2010), BALTHAZAR ET AL (2011), PICCIRILLO ET AL (2009) e XU ET AL (2007), onde M = 1 kg (massa da PPS); m = 0,354 kg (massa do pêndulo); l = 0,3166 m (comprimento da haste pendular); k1 = 0,3156 N/rad (rigidez da mola torcional); k3 = 0,960999 N/m (rigidez da mola vertical); c = 0,313 N.s/m (amortecimento da PPS); ctheta = 0,0614 N.s/m (amortecimento do pêndulo); A = 1,5 N (amplitude da força de excitação); w = 5,3 Hz (frequência da força de excitação); g = 9,81 m/s2 (aceleração da gravidade).
2.1.1.1 Retratos de Fase Segundo KOÇAK e HALE (1991) e THOMPSON E STEWART (1991), plotando-se
um ponto a cada instante de tempo em um sistema de coordenadas ortogonais, onde cada coordenada dependente representa uma das variáveis que compõem o sistema, origina-se o retrato de fase do sistema, ou seja, o conjunto destes pontos origina uma órbita ou trajetória de fase.
Nas Figuras (3a) e (3b), temos o retrato de fase do deslocamento vertical da PPS, , em relação à velocidade vertical, . Ao observar o retrato, fica evidente que a trajetória da PPS é bastante irregular, dada a presença de não conformidades ao movimento, fazendo com que se apresente um déficit de desempenho no sistema, na forma de vibrações excessivas e indesejadas.
VI Seminário da Pós-graduação em Engenharia Mecânica
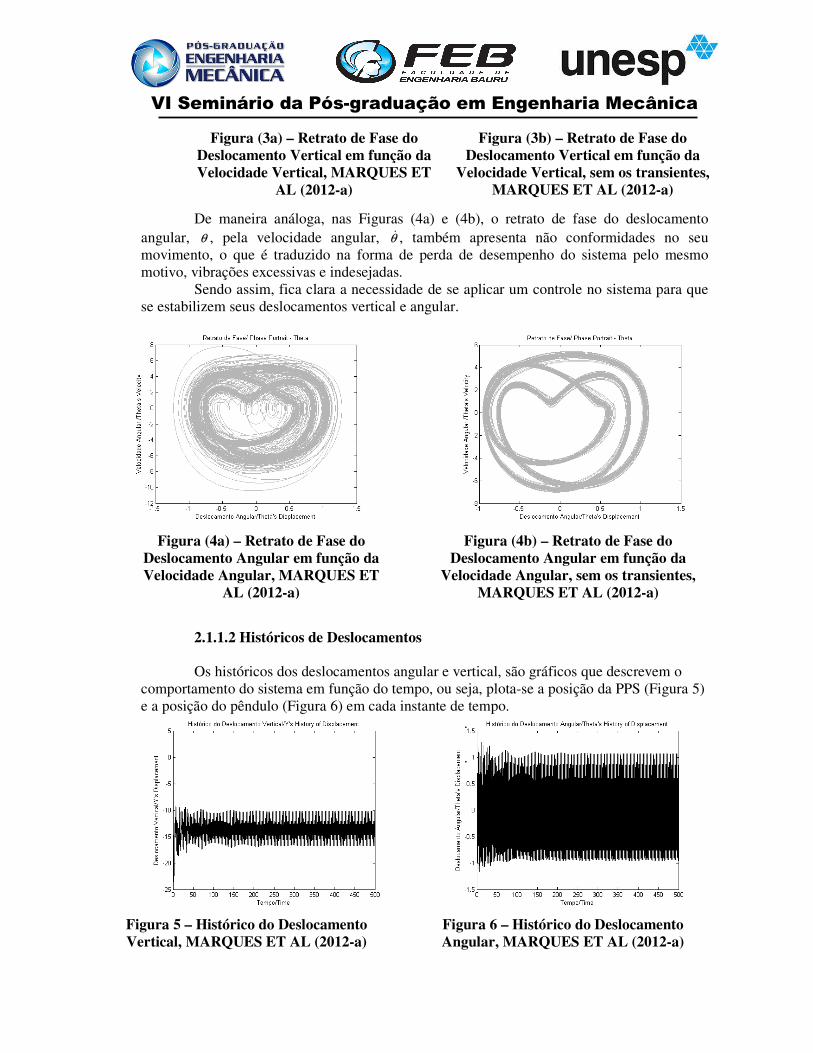
De maneira análoga, nas Figuras (4a) e (4b), o retrato de fase do deslocamento
angular, θ , pela velocidade angular, θ& , também apresenta não conformidades no seu movimento, o que é traduzido na forma de perda de desempenho do sistema pelo mesmo motivo, vibrações excessivas e indesejadas.
Sendo assim, fica clara a necessidade de se aplicar um controle no sistema para que se estabilizem seus deslocamentos vertical e angular.
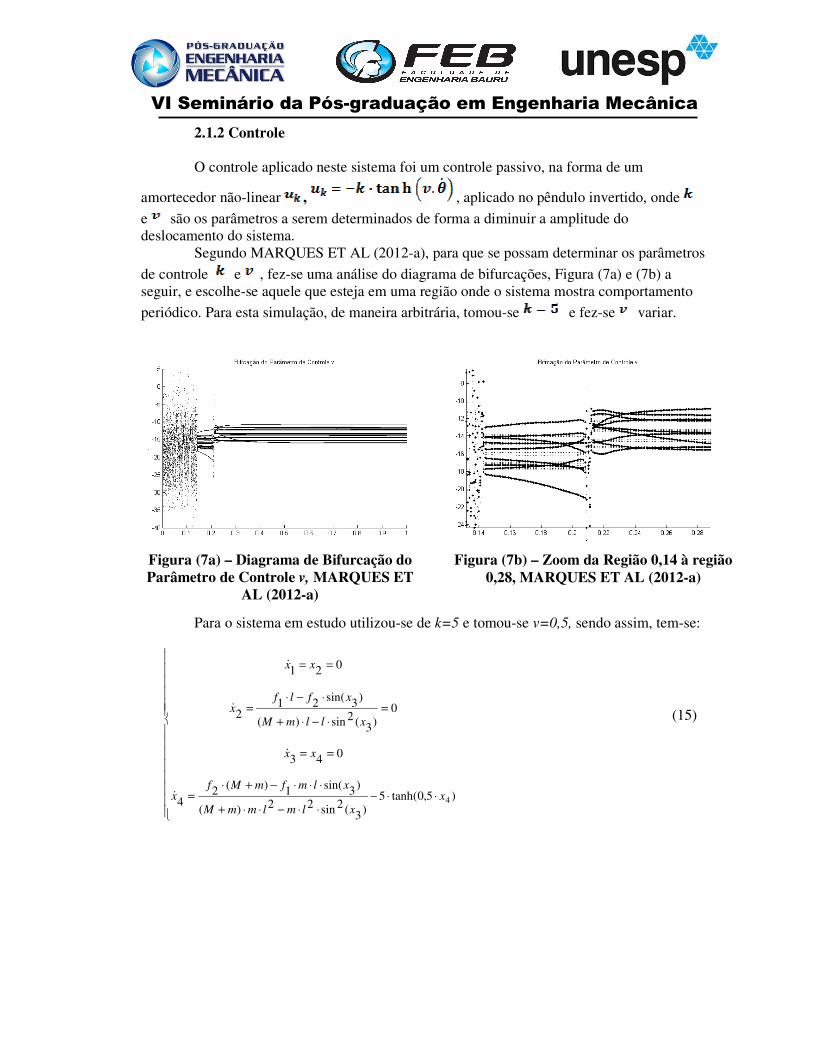
2.1.1.2 Históricos de Deslocamentos Os históricos dos deslocamentos angular e vertical, são gráficos que descrevem o
comportamento do sistema em função do tempo, ou seja, plota-se a posição da PPS (Figura 5) e a posição do pêndulo (Figura 6) em cada instante de tempo.
. .
Figura (3b) – Retrato de Fase do Deslocamento Vertical em função da
Velocidade Vertical, sem os transientes, MARQUES ET AL (2012-a)
Figura (4b) – Retrato de Fase do Deslocamento Angular em função da
Velocidade Angular, sem os transientes, MARQUES ET AL (2012-a)
Figura 5 – Histórico do Deslocamento Vertical, MARQUES ET AL (2012-a)
Figura (4a) – Retrato de Fase do Deslocamento Angular em função da Velocidade Angular, MARQUES ET
AL (2012-a)
Figura (3a) – Retrato de Fase do Deslocamento Vertical em função da Velocidade Vertical, MARQUES ET
AL (2012-a)
Figura 6 – Histórico do Deslocamento Angular, MARQUES ET AL (2012-a)
VI Seminário da Pós-graduação em Engenharia Mecânica
2.1.2 Controle O controle aplicado neste sistema foi um controle passivo, na forma de um
amortecedor não-linear , , aplicado no pêndulo invertido, onde
e são os parâmetros a serem determinados de forma a diminuir a amplitude do deslocamento do sistema.
Segundo MARQUES ET AL (2012-a), para que se possam determinar os parâmetros
de controle e , fez-se uma análise do diagrama de bifurcações, Figura (7a) e (7b) a seguir, e escolhe-se aquele que esteja em uma região onde o sistema mostra comportamento
periódico. Para esta simulação, de maneira arbitrária, tomou-se e fez-se variar.
Para o sistema em estudo utilizou-se de k=5 e tomou-se v=0,5, sendo assim, tem-se:
⋅⋅−⋅⋅−⋅⋅+
⋅⋅⋅−+⋅=
==
=⋅−⋅+
⋅−⋅=
==
)5,0tanh(5)3(2sin22)(
)3sin(1)(24
043
0)3(2sin)(
)3sin(212
021
4xxlmlmmM
xlmfmMfx
xx
xllmM
xflfx
xx
&
&
&
&
(15)
Figura (7a) – Diagrama de Bifurcação do Parâmetro de Controle v, MARQUES ET
AL (2012-a)
Figura (7b) – Zoom da Região 0,14 à região 0,28, MARQUES ET AL (2012-a)

VI Seminário da Pós-graduação em Engenharia Mecânica
2.1.2.1 Resultados Obtidos com o Controle
De acordo com as Figuras (8a) e (8b), acima, pode-se observar a boa aplicação do controle no que diz respeito ao deslocamento da PPS (Plataforma Pendular Suspensa), que inicialmente apresentava excessiva irregularidade em seu movimento (azul) e que após o controle, tornou-se muito mais próximo de um movimento harmônico (vermelho), melhorando o desempenho do sistema, ou seja, tornando-o mais seguro e com menor manutenção.
Quando se observa o comportamento do deslocamento pendular, Figuras (9a) e (9b)
acima, a comparação entre o sistema sem o controle de oscilações (verde) e com o controle de oscilações (vermelho), reforça ainda mais a eficácia do controle aplicado ao sistema, dado o comportamento muito mais regular apresentado em sua nova órbita, fazendo com que o sistema se torne mais seguro e de menor custo de manutenção.
Figura (8b) – Retrato de Fase do Deslocamento Vertical pela Velocidade Vertical Comparando o Sistema sem o
Controle (Azul) e o Sistema Controlado (Vermelho), sem transientes, MARQUES
ET AL (2012-a)
Figura (9a) – Retrato de Fase de por , Comparando o Sistema sem o Controle
(verde) e o Sistema Controlado (vermelho), MARQUES ET AL (2012-a)
Figura (8a) – Retrato de Fase do Deslocamento Vertical pela Velocidade Vertical Comparando o Sistema sem o
Controle (Azul) e o Sistema Controlado (Vermelho), MARQUES ET AL (2012-a)
Figura (9b) – Retrato de Fase de por , Comparando o Sistema sem o Controle (verde)
e o Sistema Controlado (vermelho), sem transientes, MARQUES ET AL (2012-a)

VI Seminário da Pós-graduação em Engenharia Mecânica
Ao analisar os históricos comparativos do deslocamento vertical e angular a menor amplitude de deslocamento referenciada pela cor vermelha nos gráficos (sistema após o controle) é mais um fator que evidencia a eficácia da aplicação do controle no sistema.
2.1.2.2 Conclusões Referentes aos Resultados Obtidos com o Controle Após a análise das equações governantes do movimento, mediante as Figuras (3a),
(3b), (4a), (4b), 5 e 6, pode-se afirmar que o sistema apresenta movimentos demasiadamente irregulares, fazendo com que o mesmo apresente perda de performance e uma necessidade de controle de suas oscilações. Através do diagrama de bifurcações, Figuras (7a) e (7b), estipulou-se os parâmetros de controle ótimos a serem utilizados e por meio das Figuras (8a), (8b), (9a), (9b), 10 e 11 pode-se concluir que o controle passivo proposto, na forma de uma amortecedor não-linear, foi bem aplicado, havendo levado o sistema à orbitas harmônicas e controlando o excesso de irregularidades apresentado inicialmente. Sendo assim, pode-se afirmar que o sistema de perfuração apresentado e representado pelo modelo da Figura (2) tornou-se mais barato e seguro, dado o controle de vibrações que foi aplicado. Para trabalhos futuros será inserida a parte elétrica da fonte de excitação, bem como uma análise mais aprofundada e a discussão de existência de caos no sistema.
2.2 Modelo II
O modelo matemático apresentado a seguir, Figura 12, é a evolução do modelo apresentado pela Figura 2 e é definido como um sistema “mono-pendular” invertido, fixado a uma plataforma suspensa de massa M. O pêndulo consiste de uma massa m, conectada por uma haste de comprimento l, que por sua vez é fixada à base da plataforma suspensa por meio
de uma mola torcional de rigidez não-linear, dada por , onde é o ângulo formado entre o pêndulo e a plataforma. As variáveis qx e qy são os deslocamentos da plataforma suspensa nas direções horizontal e vertical, respectivamente. A PPS, Plataforma
Pendular Suspensa, possui uma mola constante de rigidez linear, , bem como um
Figura 10 – Histórico do DescolcamentoVertical Comparativo entre o Sistema sem o Controle (Preto) e o Sistema
Controlado (Vermelho), MARQUES ET AL (2012-a)
Figura 11 – Histórico do Deslocamento Angular Comparativo entre o Sistema sem o Controle (Preto) e o Sistema Controlado (Vermelho), MARQUES ET AL (2012-a)

VI Seminário da Pós-graduação em Engenharia Mecânica
amortecedor c, ver Figura 1, no seu acoplamento com a fonte de excitação do sistema, um EDS, Electrodynamic Shaker.
O acoplamento entre a PPS e o EDS é realizado através da força eletromagnética,
devido ao imã permanente e a , onde em que e são o comprimento do condutor e o campo magnético, respectivamente. Tal acoplamento gera uma Força de Laplace na parte mecânica e a Voltagem Eletromotriz de Lenz na parte elétrica. A parte elétrica do sistema consiste de um resistor R, um indutor L, um condensador C e uma
fonte de tensão senoidal , em que e são a amplitude e a frequência, respectivamente e t o tempo, todos conectados em série. No presente modelo, a voltagem do condensador é uma função não-linear de carga elétrica instantânea q, definida como:
(16)
onde é o valor linear de C e é o coeficiente não-linear, dependendo do tipo de capacitor a ser usado.
As equações governantes do movimento do sistema são determinadas de forma análoga ao processo utilizado para o modelo I, sendo assim, determinando as coordenadas generalizadas, tem-se:
Para a PPS:
(17) Onde é definido como o deslocamento vertical e conseqüentemente a velocidade vertical.
E para o pêndulo tem-se:
(18)
Figura 12 – Modelo Simplificado de Navio Perfurador de Petróleo, MARQUES ET AL (2012-b)

VI Seminário da Pós-graduação em Engenharia Mecânica
Para o Circuito Elétrico, faz-se uma analogia força-voltagem, com base na Lei das
Malhas de Kirchhoff, Dorf e Bishop (2001), dado que os elementos do circuito se apresentam conectados em série, de forma que obtêm-se:
Tabela 1 – Elementos análogos de sistemas mecânicos e elétricos baseado na relação força-voltagem. Medidas no Sistema Internacional de Unidades (SI) Sistema Mecânico Sistema Elétrico
Força f ( N ) ou Torque T ( mN. ) Voltagem e (V )
Massa m ( Kg ) ou Inércia J ( 2.mKg ) Indutância L ( H )
Amortecimento Viscoso b ( msN /. ) ou B ( radsmN /.. )
Resistência R ( Ω )
Rigidez k ( mN / ) ou K ( radmN /. ) Inverso da Capacitância C/1 ( F/1 ) Deslocamento x ( m ) ou θ ( rad ) Carga Elétrica q (C )
Velocidade x& ( sm / ) ou θ& ( srad / ) Corrente Elétrica i ( A )
Aceleração x&& ( 2/ sm ) ou θ&& ( 2/ srad ) Variação dtdi / ( sA / ) Determinados o referencial, as coordenadas generalizadas e os termos análogos entre elétrica e mecânica, busca-se calcular as energias, cinética (T) e potencial (V), do sistema. Dessa forma tem-se: Energia Cinética (T)
(19)
Energia Potencial (V)
(20)
A partir daí constrói-se a função Lagrangiana, L:
(21) Para que se possa analisar as forças não conservativas do sistema, define-se a função de dissipação de energia de Rayleigh.
(22)
Substitui-se (21) e (22) em (09) e variando-se as coordenadas generalizadas do sistema, para que se possa encontrar as equações governantes do movimento do mesmo tem-se:
VI Seminário da Pós-graduação em Engenharia Mecânica
(26)
Onde
e . 2.2.1 Simulações Numéricas e Resultados do Modelo II Os parâmetros utilizados nas simulações foram readequados e estão identificados a
seguir, onde M = 125 kg (massa da PPS); m = 5,354 kg (massa do pêndulo); l = 0,3166 m (comprimento da haste pendular); k = 0,430999 e h = 5,9, (rigidez da mola torcional); k2 = 0,4535 N/m (rigidez da mola vertical); c = 0,7471295 N.s/m (amort. da PPS); ctheta = 0,195 N.s/m (amortecimento do pêndulo); e0 = 14,6 V (amplitude da fonte de tensão); C0 = 15,6578 F; K=126 N/A; L=0.002626 H; R = 0,3 ohms; alpha3 = 3,745; Omega = 5,5 Hz (freq. da força de excitação); g = 9,81 m/s2 (aceleração da gravidade).
2.2.1.1 Retratos de Fase
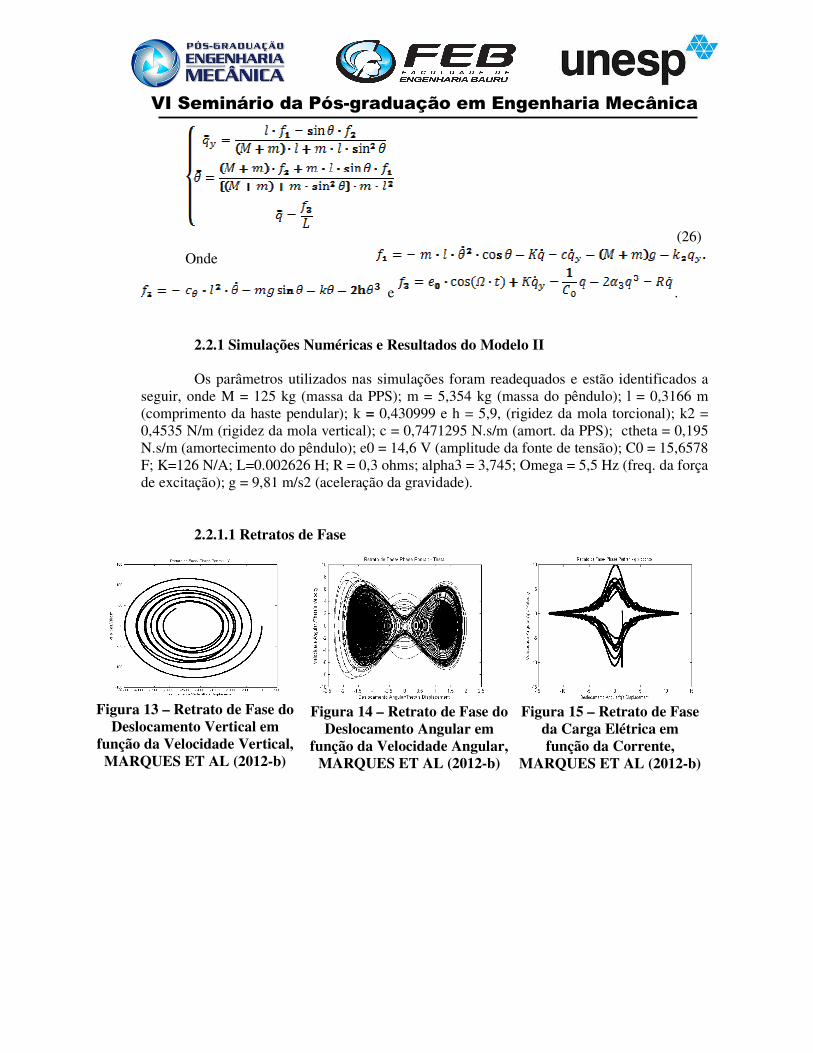
Figura 13 – Retrato de Fase do Deslocamento Vertical em
função da Velocidade Vertical, MARQUES ET AL (2012-b)
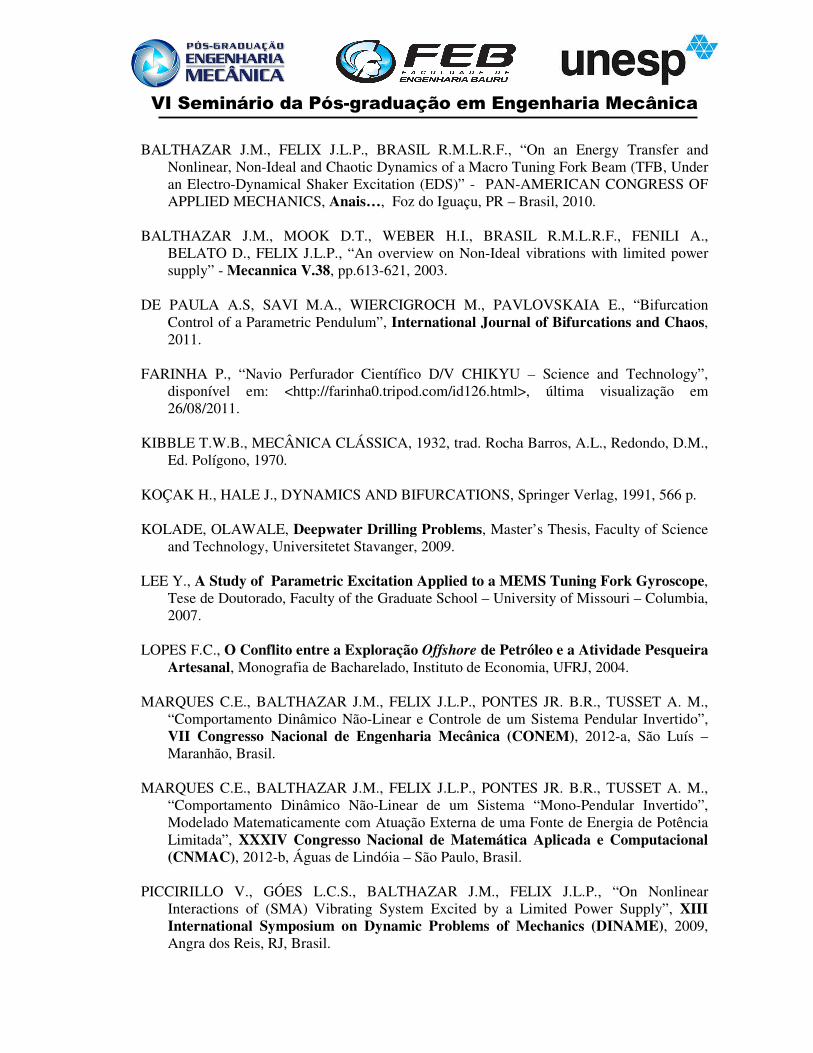
Figura 14 – Retrato de Fase do Deslocamento Angular em
função da Velocidade Angular, MARQUES ET AL (2012-b)
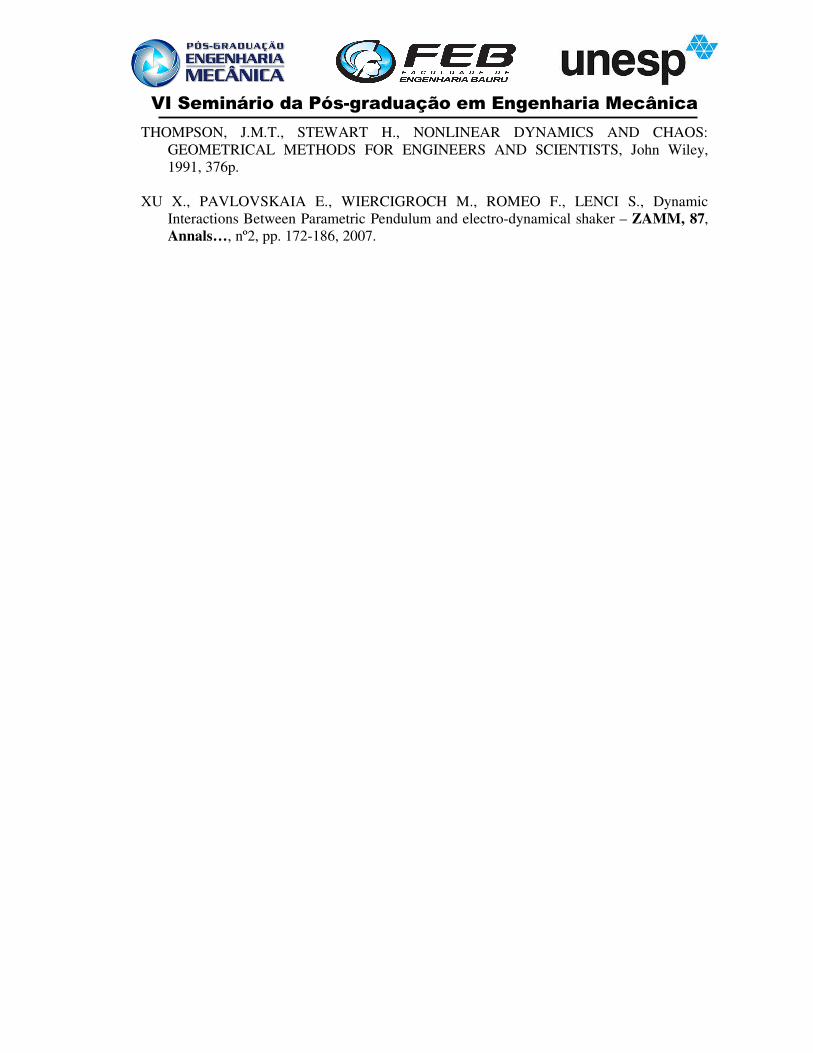
Figura 15 – Retrato de Fase da Carga Elétrica em função da Corrente,
MARQUES ET AL (2012-b)

VI Seminário da Pós-graduação em Engenharia Mecânica
2.2.1.2 Históricos do Deslocamento
2.2.1.3 Conclusões Parciais Referentes aos Resultados Obtidos com o Modelo II
Com base nas figuras 13, 14, 15, 16, 17 e 18, pode-se concluir que o comportamento
da PPS em relação às amplitudes do histórico de deslocamento e se mantêm bastante regular, o que é confirmado pelo comportamento harmônico apresentado por seu retrato de fase (figura 13), em contrapartida o pêndulo dá indícios de caos homoclínico, (ver figura 14), denotando uma acentuada irregularidade de órbitas, o que também é reforçado pelo seu histórico de deslocamento, (ver figura 17).
Evidencia-se também a necessidade de se estudar a troca de energia entre a parte mecânica e elétrica do sistema, bem como o refinamento dos valores de parâmetros do sistema, além é claro, de se considerar incertezas, que são os trabalhos futuros relacionados a este estudo.
3. CONCLUSÃO O aumento de complexidade dinâmica aplicado na passagem do modelo I para o modelo II, fez com que houvesse mais proximidade entre a modelagem matemática e o modelo físico real da fonte de excitação, dessa forma, apesar de extraídos resultados parciais, a qualidade dos resultados é muito melhor quando comparados aos resultados referentes ao modelo I.
O próximo passo seria o estudo da troca de energia entre a parte mecânica e elétrica do modelo II, além do desengaste da PPS da vertical, passando-se a considerar também o movimento na horizontal da PPS.
Para trabalhos futuros é necessário também considerar incertezas e a massa da base da PPS, aproximando ainda mais a modelagem matemática da realidade, promovendo resultados muito mais tangíveis.
REFERÊNCIAS BIBLIOGRÁFICAS
BALTHAZAR J.M., FELIX J.L.P., “Revisited Nonlinear Non-ideal Vibrations”. In: Vibration Problems ICOVP (Supplement), Technical University of Liberec, Prague, Czech Public, pp.84-89, 2011.
Figura 18 – Histórico do Deslocamento da
Carga q, MARQUES ET AL (2012-b)
Figura 17 – Histórico do Deslocamento
Angular , MARQUES ET AL
Figura 16 – Histórico do Deslocamento Vertical
, MARQUES ET AL (2012-b)
VI Seminário da Pós-graduação em Engenharia Mecânica
BALTHAZAR J.M., FELIX J.L.P., BRASIL R.M.L.R.F., “On an Energy Transfer and
Nonlinear, Non-Ideal and Chaotic Dynamics of a Macro Tuning Fork Beam (TFB, Under an Electro-Dynamical Shaker Excitation (EDS)” - PAN-AMERICAN CONGRESS OF APPLIED MECHANICS, Anais…, Foz do Iguaçu, PR – Brasil, 2010.
BALTHAZAR J.M., MOOK D.T., WEBER H.I., BRASIL R.M.L.R.F., FENILI A.,
BELATO D., FELIX J.L.P., “An overview on Non-Ideal vibrations with limited power supply” - Mecannica V.38, pp.613-621, 2003.
DE PAULA A.S, SAVI M.A., WIERCIGROCH M., PAVLOVSKAIA E., “Bifurcation
Control of a Parametric Pendulum”, International Journal of Bifurcations and Chaos, 2011.
FARINHA P., “Navio Perfurador Científico D/V CHIKYU – Science and Technology”,
disponível em: <http://farinha0.tripod.com/id126.html>, última visualização em 26/08/2011.
KIBBLE T.W.B., MECÂNICA CLÁSSICA, 1932, trad. Rocha Barros, A.L., Redondo, D.M.,
Ed. Polígono, 1970. KOÇAK H., HALE J., DYNAMICS AND BIFURCATIONS, Springer Verlag, 1991, 566 p. KOLADE, OLAWALE, Deepwater Drilling Problems, Master’s Thesis, Faculty of Science
and Technology, Universitetet Stavanger, 2009. LEE Y., A Study of Parametric Excitation Applied to a MEMS Tuning Fork Gyroscope,
Tese de Doutorado, Faculty of the Graduate School – University of Missouri – Columbia, 2007.
LOPES F.C., O Conflito entre a Exploração Offshore de Petróleo e a Atividade Pesqueira
Artesanal, Monografia de Bacharelado, Instituto de Economia, UFRJ, 2004. MARQUES C.E., BALTHAZAR J.M., FELIX J.L.P., PONTES JR. B.R., TUSSET A. M.,
“Comportamento Dinâmico Não-Linear e Controle de um Sistema Pendular Invertido”, VII Congresso Nacional de Engenharia Mecânica (CONEM), 2012-a, São Luís – Maranhão, Brasil.
MARQUES C.E., BALTHAZAR J.M., FELIX J.L.P., PONTES JR. B.R., TUSSET A. M.,
“Comportamento Dinâmico Não-Linear de um Sistema “Mono-Pendular Invertido”, Modelado Matematicamente com Atuação Externa de uma Fonte de Energia de Potência Limitada”, XXXIV Congresso Nacional de Matemática Aplicada e Computacional (CNMAC), 2012-b, Águas de Lindóia – São Paulo, Brasil.
PICCIRILLO V., GÓES L.C.S., BALTHAZAR J.M., FELIX J.L.P., “On Nonlinear
Interactions of (SMA) Vibrating System Excited by a Limited Power Supply”, XIII International Symposium on Dynamic Problems of Mechanics (DINAME), 2009, Angra dos Reis, RJ, Brasil.
VI Seminário da Pós-graduação em Engenharia Mecânica
THOMPSON, J.M.T., STEWART H., NONLINEAR DYNAMICS AND CHAOS: GEOMETRICAL METHODS FOR ENGINEERS AND SCIENTISTS, John Wiley, 1991, 376p.
XU X., PAVLOVSKAIA E., WIERCIGROCH M., ROMEO F., LENCI S., Dynamic
Interactions Between Parametric Pendulum and electro-dynamical shaker – ZAMM, 87, Annals…, nº2, pp. 172-186, 2007.