Coordenadas Curvilıneas
Guillermo A Silva
Departamento de Fısica, UNLP
X
Y
Z
O
x y
z
( x , y , z )
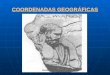
Figure 1: Coordenadas cartesianas
Existen distintos sistemas de coordenadas para expresar la posicion de un punto
P en R3. Usualmente fijamos un origen y foliamos el espacio con tres conjuntos
de planos paralelos y mutuamente ortogonales (x = cte, y = cte y z = cte).
Las coordenadas de un punto dado corresponden a los valores de los planos que
pasan por dicho punto.
1

Podemos pensar en superficies mas generales ξ(x, y, z) = cte., no necesaria-
mente planas. De esta manera obtenemos los sistemas de coordenadas polares,
esfericas, etc.
Figure 2: R3 foliado con superficies curvas
—
Ejemplo 1: las coordenadas esfericas (r, θ, ϕ) de un punto P de coordenadas
cartesianas (x, y, z) se corresponden con: r(x, y, z) =√x2 + y2 + z2 el ra-
dio de la esfera que pasa por P, ϕ(x, y, z) = arctan(y/x) el angulo respecto
del eje x del semiplano que pivotea sobre eje z y pasa por P, y θ(x, y, z) =
arcos(z/√x2 + y2 + z2) la apertura angular del cono de eje z que pasa por P.
Las relaciones inversas x(r, θ, ϕ), y(r, θ, ϕ) y z(r, θ, ϕ) se encuentran en (24) (ver
fig.3).
Figure 3: R3 foliado en coordenadas esfericas
—
2

Figure 4: Conjunto de superficies ξi que se cortan ortogonalmente.
. ξi sistema ortogonal de coordenadas curvilıneas: aquel para el cual las superfi-
cies de nivel
ξi(x, y, z) = cte (1)
son ortogonales. Esto significa que los vectores normales a las mismas son
ortogonales.
—
Ejemplo 2: las coordenadas cartesianas (x, y, z), cilındricas (ρ, φ, z) y esfericas
(r, θ, ϕ) son ejemplos de coordenadas curvilıneas ortogonales.
—
. ei (i = 1, 2, 3) vectores unitarios: son ortogonales a las superficies de nivel
ξi(x, y, z) = cte y estan dirigidos en el sentido creciente de la coordenada ξi.
Explıcitamente
ei(x) =∇ξi(x)
|∇ξi|(2)
Los sistemas de coordenadas ortogonales satisfacen
ei · ej = δij (3)
3

Figure 5: Conjunto de superficies ρ = cte., φ = cte. y z = cte. que determinan
las coordenadas cilındricas de un punto P.
—
Ejemplo 3: las coordenadas cilındricas de un punto P = (x, y, z) se corresponden
con las superficies dadas por: cilindros de eje z y radio ρ, semiplanos que pivotan
en el eje z de angulo φ respecto del eje x, planos z = cte.. En terminos de
coordenadas cartesianas las relaciones entre coordenadas son
ρ(x, y, z) =√x2 + y2 x(ρ, φ, z) = ρ cosφ
φ(x, y, z) = arctany
x↔ y(ρ, φ, z) = ρ sinφ
z(x, y, z) = z z(ρ, φ, z) = z (4)
Los versores eρ, eφ, ez, a partir de (2), para las superficies (4) resultan
eρ = ∇ρ(xi)|∇ρ(xi)| = (x,y,0)√
x2+y2
eφ = ∇φ(xi)|∇φ(xi)| = (−y,x,0)√
x2+y2
ez = ∇z|∇z| = (0, 0, 1)
(5)
Es inmediato verificar que este conjunto de vectores satisface1
eρ · eρ = 1, eφ · eφ = 1, ez · ez = 1 (6)
eρ · eφ = 0, eρ · ez = 0, eφ · ez = 0 ∀ xi
donde denotamos xi = (x, y, z). Asimismo
eρ × eφ = ez
1Es importante senalar que los versores ei dependen de la posicion en la cual me encuentro
en el espacio. De cualquier manera, son una trıada ortonormal en todo punto P.
4

y rotaciones cıclicas: eφ × ez = eρ, etc. En la figura 9 derecha se aprecia la
ortogonalidad de los vectores ei respecto de las superficies que los definen.
—
hi funciones de escala: se definen a partir de la variacion de r frente a incremen-
tos de las coordenadas ξi. Invirtiendo las relaciones (1), esto es ξi(x, y, z) →x(ξ1, ξ2, ξ3), y(ξ1, ξ2, ξ3), z(ξ1, ξ2, ξ3) el vector posicion de un punto P en coor-
denadas cartesianas toma la forma
rP
= x(ξi) x + y(ξi) y + z(ξi) z
A partir del cual podemos evaluar
∂r
∂ξi= hiei (sin suma en i) ⇒ δr = h1 e1 δξ
1︸ ︷︷ ︸δ1r
+h2 e2 δξ2︸ ︷︷ ︸
δ2r
+h3 e3 δξ3︸ ︷︷ ︸
δ3r
(7)
Para un sistema ortogonal, en virtud de (3), los factores hi se pueden obtener
a partir del elemento de lınea (que sera diagonal)
ds2 ≡ dr2 = dr · dr
= gij(ξ) dξidξj
= (h1)2(dξ1)2 + (h2)2(dξ2)2 + (h3)2(dξ3)2 (8)
La metrica gij(ξ) para sistemas de coordenadas ortogonales resulta diagonal
gij(ξ) =
(h1(ξ))2 0 0
0 (h2(ξ))2 0
0 0 (h3(ξ))2
esta expresion solo vale para sistemas curvilıneos ortogonales. Los factores de
escala hi se obtienen de las componentes diagonales de la metrica hi =√gii (sin
suma).
—
Ejemplo 4: de las relaciones (4) resulta
dx = cosφ dρ− ρ sinφ dφ
dy = sinφ dρ+ ρ cosφ dφ
dz = dz (9)
5

que insertadas en el elemento de lınea
ds2 = dx2 + dy2 + dz2
= dρ2 + ρ2dφ2 + dz2 ⇒ hρ = hz = 1, hφ = ρ (10)
Figure 6: Conjunto de superficies ξi para coordenadas cilındricas en R3.
Podemos escribir las relaciones (5) comoeρ
eφ
ez
=
x/ρ y/ρ 0
−y/ρ x/ρ 0
0 0 1
x
y
z
;
eρ = cosφ x + sinφ y
eφ = − sinφ x + cosφ y
ez = z
(11)
lo cual nos permite invertirlas rapidamente2x
y
z
=
x/ρ −y/ρ 0
y/ρ x/ρ 0
0 0 1
eρ
eφ
ez
(12)
=
cosφ − sinφ 0
sinφ cosφ 0
0 0 1
eρ
eφ
ez
;
x = cosφ eρ − sinφ eφ
y = sinφ eρ + cosφ eφ
z = ez
Reemplazando las expresiones de los versores cartesianos en terminos de los
2La matriz R que conecta los versores ei y los versores cartesianos xi en ortogonal. Su
inversa es entonces RT , cf. (11) y (12).
6

versores cilındricos en el vector posicion obtenemos
r = x x + y y + z z
= ρ eρ + z ez (13)
De (11) podemos obtenemos el cambio en los versores frente a pequenas varia-
ciones de las coordenadas δξi
δeρ = − sinφ x δφ+ cosφ y δφ
= eφ δφ (14)
δeφ = − cosφ x δφ− sinφ y δφ
= eρ δφ (15)
Podemos entonces ahora evaluar la variacion del vector posicion (13). La misma
obtiene contribuciones tanto de la variacion de las coordenadas como de los
versores ei
δr = δρ eρ + ρ δeρ + δz ez + z δez
= eρ δρ+ ρ eφ δφ+ ez δz (16)
donde usamos (14) para pasar a la segunda lınea. Confrontando con (7) verifi-
camos la validez de la relacion.
—
dV elemento de volumen: se define como proporcional al paralelepıpedo con-
struido a partir de las tres variaciones independientes (7)
dV = dxdydz
= |δ1r · δ2r× δ3r| = |(h1e1δξ1) · (h2e2δξ
2)× (h3e3δξ3)|
= h1h2h3 dξ1dξ2dξ3
=√g dξ1dξ2dξ3 (17)
donde usamos que por ser una trıada ortonormal |e1 · e2 × e3| = 1. Las figuras
8 y 9 derecha muestran el paralelepıpedo para el caso de coordendas esfericas y
cilındricas
—
7

Ejemplo 5: de las relaciones (24) tenemos
dx = sin θ cosϕ dr + r cos θ cosϕ dθ − r sin θ sinϕ dϕ
dy = sin θ sinϕ dr + r cos θ sinϕ dθ + r sin θ cosϕ dϕ
dz = cos θ dr − r sin θ dθ (18)
Insertando en la metrica euclıdea resulta
ds2 = dx2 + dy2 + dz2
= dr2 + r2(dθ2 + sin2 θ dϕ2)
de donde obtenemos los factores de escala y elemento de volumen
hr = 1, hθ = r, hϕ = r sin θ ⇒ dV = r2 sin θ︸ ︷︷ ︸Jacobiano(∂(x,y,z)/∂(r,θ,ϕ))
drdθdϕ
—Para sistemas de coordenadas ortogonales podemos encontrar relaciones entre las derivadas
de los versores ei. La ortogonalidad del sistema {ei} implica
∂r
∂ξi·∂r
∂ξj= 0 (i 6= j)
Derivando esta identidad resultan
0 =∂
∂ξ3
(∂r
∂ξ1·∂r
∂ξ2
)=
∂2r
∂ξ3∂ξ1·∂r
∂ξ2+
∂r
∂ξ1·∂2r
∂ξ3∂ξ2
0 =∂
∂ξ1
(∂r
∂ξ3·∂r
∂ξ2
)=
∂2r
∂ξ1∂ξ3·∂r
∂ξ2+
∂r
∂ξ3·∂2r
∂ξ1∂ξ2
0 =∂
∂ξ2
(∂r
∂ξ3·∂r
∂ξ1
)=
∂2r
∂ξ2∂ξ3·∂r
∂ξ1+
∂r
∂ξ3·∂2r
∂ξ1∂ξ2
Sumando las dos primeras y restando la tercera lınea obtenemos que
0 =∂r
∂ξ2·∂2r
∂ξ1∂ξ3
Luego, las derivadas cruzadas son ortogonales a la direccion restante
∂2r
∂ξ1∂ξ3=∂(h3e3)
∂ξ1=∂(h1e1)
∂ξ3⊥ e2 (19)
Derivando ei · ei = 1 tenemos∂ei
∂ξj⊥ ei
De los ultimos dos terminos de (19) tenemos
∂h1
∂ξ3e1 + h1
∂e1
∂ξ3= ae1 + be3 ⇒ a =
∂h1
∂ξ3y
∂e1
∂ξ3=
b
h1e3
∂h3
∂ξ1e3 + h3
∂e3
∂ξ1= ae1 + be3 ⇒ b =
∂h3
∂ξ1y
∂e3
∂ξ1=
a
h3e3
Luego,∂e1
∂ξ3=
1
h1
∂h3
∂ξ1e3,
∂e3
∂ξ1=
1
h3
∂h1
∂ξ3e1 (20)
8

y cuatro relaciones analogas, intercambiando ındices. Finalmente, para obtener la derivada
del versor ei respecto de ξi observamos que
∂e1
∂ξ1=∂(e2 × e3)
∂ξ1= −
1
h2
∂h1
∂ξ2e2 −
1
h3
∂h1
∂ξ3e3 (21)
y dos relaciones similares.
—
Ejemplo 6: de las expresiones (11) tenemos
∂ρeρ = 0, ∂φeφ = −eρ ∂zez = 0
que verifican (21) teniendo en cuenta hρ = hz = 1, hφ = ρ halladas en (10).
Mientras que las derivadas no diagonales resultan
∂φeρ = eφ, ∂zeρ = 0, ∂ρeφ = 0, ∂zeφ = 0, ∂ρez = 0, ∂φez = 0
verificando (20). Naturalmente este resultado coincide con (14)-(15).
9

—
Operador Nabla ∇ = (∂x, ∂y, ∂z)
En coordenadas curvilıneas ortogonales toma la forma
∇ = e1
h1
∂∂ξ1 +
e2
h2
∂∂ξ2 +
e3
h3
∂∂ξ3
—
Figure 7: Representacion de una funcion de dos variables f(x, y) en R3. Izq: en
rojo tenemos las curvas de nivel y en azul la direccion en la que apunta −∇f .
La direccion de grad f es ortogonal a las lıneas de nivel y apunta en la direccion
de crecimiento de la funcion. Derecha: misma idea, ahora sobre el plano (x, y)
representamos con flechas la direccion de grad f . Notemos que los vectores se
alejan del mınimo de la funcion, apuntan en la direccion de maximo crecimiento
de la funcion.
—
. Gradiente: se define en terminos de operador ∇ como: grad f = ∇f
grad f.=∂f
∂xx +
∂f
∂yy +
∂f
∂zz
En coordenadas ortogonales arbitrarias toma la forma
grad f =e1
h1
∂f
∂ξ1+
e2
h2
∂f
∂ξ2+
e3
h3
∂f
∂ξ3
10

—
. Rotor: su definicion es rotV = ∇×V. Llamando xi = (x, y, z) escribimos en
coordenadas cartesianas V = Vi xi
rotV.= det
∣∣∣∣∣∣∣∣x y z
∂x ∂y ∂z
Vx Vy Vz
∣∣∣∣∣∣∣∣= εijk(∂jVk)xi donde ∂i = (∂x, ∂y, ∂z)
= (∂yVz − ∂zVy) x− (∂xVz − ∂zVx) y + (∂xVy − ∂yVx) z
En coordenadas ortogonales arbitrarias
rotV =e1
h1× ∂V
∂ξ1+
e2
h2× ∂V
∂ξ2+
e3
h3× ∂V
∂ξ3
Tengamos en cuenta, en esta ultima expresion, que al expresar un campo
vectorial V como
V = V 1e1 + V 2e2 + V 3e3
en coordenadas ortogonales arbitrarias, debemos tener en cuenta las
contribuciones de las derivadas de los versores ei dadas por (20) y (21).
Usandolas se obtiene
rotV =e1
h2h3
(∂(h3V
3)
∂ξ2− ∂(h2V
2)
∂ξ3
)+
e2
h3h1
(∂(h1V
1)
∂ξ3− ∂(h3V
3)
∂ξ1
)+
e3
h1h2
(∂(h2V
2)
∂ξ1− ∂(h1V
1)
∂ξ2
)que podemos reescribir como
rotV = det
∣∣∣∣∣∣∣∣e1
h2h3
e2
h1h3
e3
h1h2
∂/∂ξ1 ∂/∂ξ2 ∂/∂ξ3
h1V1 h2V
2 h3V3
∣∣∣∣∣∣∣∣—
. Divergencia: definida como divV = ∇ ·V
divV.= ∂xVx + ∂yVy + ∂zVz
En coordenadas ortogonales arbitrarias
divV =e1
h1· ∂V∂ξ1
+e2
h2· ∂V∂ξ2
+e3
h3· ∂V∂ξ3
(22)
11

En terminos de componentes
∇ ·V =1
h1h2h3
(∂(h2h3V
1)
∂ξ1+∂(h3h1V
2)
∂ξ2+∂(h1h2V
3)
∂ξ3
)—
. Laplaciano:
. Campo escalar:
∇2f = ∇ · ∇f
= ∂2xxf + ∂2
yyf + ∂2zzf
Explıcitamente en coordenandas ortogonales arbitrarias
∇2f =1
h1h2h3
(∂
∂ξ1
(h2h3
h1
∂f
∂ξ1
)+
∂
∂ξ2
(h3h1
h2
∂f
∂ξ2
)+
∂
∂ξ3
(h1h2
h3
∂f
∂ξ3
))(23)
. Campo vectorial: Las componentes de ∇2V pueden ser calculadas
reemplazando f → V = V 1e1 + V 2e2 + V 3e3 en (23) , y usando las
expresiones (20)-(21) para las derivadas de los versores unitarios ei, pero el
resultado es muy complicado para ser util. Para encontrar las componentes
de ∇2V resulta mas conveniente usar la identidad
∇2V = ∇(∇ ·V)−∇× (∇×V)
—
12

—
• Coordenadas esfericas - (r, θ, ϕ)
Este sistema de coordenadas se define a partir de ξ1 = r, ξ2 = θ, ξ3 = ϕ donde
r(x, y, z) =√x2 + y2 + z2 x(r, θ, ϕ) = r sin θ cosϕ
θ(x, y, z) = arccos
(z√
x2 + y2 + z2
)↔ y(r, θ, ϕ) = r sin θ sinϕ
ϕ(x, y, z) = arctan(yx
)z(r, θ, ϕ) = r cos θ (24)
que resulta un conjunto de superficies que se corta ortogonalmente en todo
punto.
Figure 8: Coordenadas esfericas. En la figura de la izquierda se aprecia que los
versores unitarios er, eφ, eθ son ortogonales a las superficies (esferas, plano y
cono) que definen las coordenadas ρ, φ, θ. En la figura de la derecha observamos
el paralelepıpiedo que define el elemento de volumen (17).
Los versores unitarios resultan
er =∇r
|∇r|=
(x, y, z)√x2 + y2 + z2
= (sin θ cosϕ, sin θ sinϕ, cos θ)
eθ =∇θ
|∇θ|=
(xz, yz,−(x2 + y2))√x2 + y2 + z2
√x2 + y2
= (cos θ cosϕ, cos θ sinϕ,− sin θ)
eϕ =∇ϕ
|∇ϕ|=
1√x2 + y2
(−y, x, 0) = (− sin θ sinϕ, sin θ cosϕ, 0)
13

En analogıa con (11) tenemoser
eθ
eϕ
=
x/r y/r z/r
xz/(r2 sin θ) yz/(r2 sin θ) −(x2 + y2)/(r2 sin θ)
−y/(r sin θ) x/(r sin θ) 0
x
y
z
= R ·
x
y
z
Podemos verificar que R es ortogonal, luego R−1 = RT de manera que
x
y
z
= RT ·
er
eθ
eϕ
Procediendo como en (13) llegamos a
r = r er
Asimismo
∂er∂r
= 0,∂er∂θ
= eθ,∂er∂ϕ
= sin θ eϕ
∂eθ∂r
= 0,∂eθ∂θ
= −er,∂eθ∂ϕ
= cos θ eϕ
∂eϕ∂r
= 0,∂eϕ∂θ
= 0,∂eϕ∂ϕ
= − sin θ er − cos θ eθ
La terna ordenada satisface
er × eθ = eϕ, y rotaciones ciclicas
—
• Coordenadas cilındricas - (ρ, ϕ, z)
Definidas en (4)
ρ(x, y, z) =√x2 + y2 x(ρ, φ, z) = ρ cosφ
φ(x, y, z) = arctany
x↔ y(ρ, φ, z) = ρ sinφ
z(x, y, z) = z z(ρ, φ, z) = z
Los factores de escala se calcularon en (10) resultando
ds2 = dρ2 + ρ2dϕ2 + dz2 ⇒ hρ = 1, hϕ = ρ, hz = 1
El vector posicion se reescribe como (13)
r = ρ eρ + z ez
14

Figure 9: Coordenadas cilındricas. Es evidente de la figura de la izquierda
que la orientacion de los versores eρ, eφ depende del punto. En otras palabras,
las componentes cartesianas de los mismos dependen del punto P donde nos
ubiquemos.
Las derivadas de versores no nulas resultan
∂eρ∂ϕ
= eϕ,∂eϕ∂ϕ
= −eρ
La terna satisface
eρ × eφ = ez y rotaciones cıclicas
—
Formulæ Vectorialis Utilis
—
Gradiente - ∇f :
. Cartesianas-(x, y, z): ∇f = ∂xf ex + ∂yf ey + ∂zf ez
. Esfericas-(r, θ, ϕ): ∇f = ∂rf er + 1r∂θf eθ + 1
r sin θ∂ϕf eϕ
. Polares-(ρ, ϕ, z): ∇f = ∂ρf eρ + 1ρ∂ϕf eϕ + ∂zf ez
15

—
Rotor - ∇×A:
. Cartesianas-(x, y, z):
∇×A = (∂yAz − ∂zAy) ex + (∂zAx − ∂xAz) ey + (∂xAy − ∂yAx) ez
. Esfericas (r, θ, ϕ) :
∇×A =1
r sin θ
(∂θ(Aϕ sin θ)− ∂ϕAθ
)er +
1
r
(1
sin θ∂ϕAr − ∂r(rAϕ)
)eθ
+1
r
(∂r(rAθ)− ∂θAr
)eϕ
. Polares (ρ, ϕ, z) :
∇×A =
(1
ρ∂ϕAz − ∂zAϕ
)eρ +
(∂zAρ− ∂ρAz
)eϕ +
1
ρ
(∂ρ(ρAϕ)− ∂ϕAρ
)ez
—
Laplaciano
Campo escalar: ∇2V = ∇ · ∇V
. Cartesianas-(x, y, z): ∇2V = ∂2xxV + ∂2
yyV + ∂2zzV
. Esfericas-(r, θ, ϕ): ∇2V = 1r2 ∂r(r
2∂rV )+ 1r2 sin θ∂θ(sin θ ∂θV )+ 1
r2 sin2 θ∂2ϕϕV
. Polares-(ρ, ϕ, z): ∇2V = 1ρ∂ρ(ρ ∂ρV ) + 1
ρ2 ∂2ϕϕV + ∂2
zzV
Campo vectorial: ∇2A = ∇ · ∇A
. Cartesianas -(x, y, z) : ∇2A =(∇2Ax
)ex +
(∇2Ay
)ey +
(∇2Az
)ez
. Esfericas -(r, θ, ϕ) : ∇2A =
(∇2Ar −
2Arr2− 2
r2 sin θ∂θ(Aθ sin θ)− 2
r2 sin θ∂ϕAϕ
)er
+
(∇2Aθ +
2
r2∂θAr −
Aθ
r2 sin2 θ− 2 cos θ
r2 sin2 θ∂ϕAϕ
)eθ
+
(∇2Aϕ +
2
r2 sin θ∂ϕAr +
2 cos θ
r2 sin2 θ∂ϕAϕ −
Aϕ
r2 sin2 θ
)eϕ
. Polares -(ρ, ϕ, z) : ∇2A =
(∇2Aρ −
Aρρ2− 2
ρ2∂ϕAϕ
)eρ +
(∇2Aϕ +
2
ρ2∂ϕAρ −
Aϕρ2
)eϕ
+
(∇2Az
)ez
16
Recommended