Embed Size (px)
Citation preview

. . ANÃL I SE DO COMPORTAMENTO 'NÃO LINEAR GEOM[TR ICO E FlS ICO
• DE1~ÕRTICOS PLANOS DE CONCRETO ARMADO
Johê Ctaudio de Fa~ia Tetteh
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
PÕS-'GRAOUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO COMO 'PARTE DOS REQUISITOS NECESSÃRIOS PARA A OBTENÇÃO DO
~GRAU DE MESTRE EM CI[NCIA (M.Sc.)
~provada por:
' ·~·
. _,
Presidente
RIO DE JANEIRO ESTADO DO RIO DE 'JANEIRO - BRASIL
FEVEREIRO DE 1976

AGRADECIMENTOS
Ao Professor FERNANDO LUIZ LOBO B. CARNEIRO, _P.elo
incentivo e orientaçio prestada a este trabalho.
Ao Professor LUIZ FERNANDO TABORDA GARCIA, pela a
mizade e valiosas sugestões.
Aos colegas da COPPE-UFRJ, pela cooperaçao.
Ao CNPq, pelo apoio concedido.

SUMÃRIO
O presente trabalho representa um passo a mais den
tro de um estudo mais teórico e aprofundado sobre estruturas pl!
nas de concreto armado.
t apresentado um programa para anãlise de pórticos
planos de concreto armado em que dois tipos de não linearidades
são levados em conta:
1) Não linea4idade geomét4ica
ê tratada aqui, levando-se em consideração os efei
tos de segunda ordem decorrentes da interação axial
flexão;
2) Não linea4idade óZ6ica
consiste em considerar as caracteristicas f i si c as
dos materiais (concreto e aço), tendo em vista as re

comendações CEB-FIP.
O programa foi desenvolvido para barras de eixo reto
de seçao qualquer (simétricas em relação ao plano da estrutura)
e com qualquer distribuição de armadura.
Quanto as suas aplicações, podemos utilizá-lo para
uma análise de esforços e deslocamentos mediante um carregamento
definido, bem como, para uma pesquisa da capacidade de carga, na
qual seu comportamento não linear ê analisado para cada intensi
dade de carregamento, atê que seja atingida a carga
tida pela estrutura.
Estão incluidos, ao final do trabalho, alguns exem
plos e comparações com outros métodos do gênero, bem como alg~
mas observações a respeito da consideração dos efeitos da fluên
eia no concreto sob carga de longa duração.

iv
ABSTRACT
This work is a further step into a more theoretical
and profound study on reinforced concrete structures.
A program is presented for analysis of reinforced
concrete plane frames, where two different types of non line
arities are dealt with:
1) Geomet~ieal non linea~ity
considering the second-order effects, resulting
from axial-flexural interaction;
considering the physical characteristics of materials
(concrete and steel ), through the approach adopted
by the CEB-FIP recommendations.

V
This program was developed for straight members,
with any cross-section (symmetrical to the structure plane),
and with any reinforcement distributions.
As for its applicability, it may be employed for an
analysis of forces and displacements for a definite loading, as
well as for a research on load-bearing capacity, in which its
non linear performance is analysed for each loading intensity,
until the structure maximum load-bearing capacity is obtained.
At the end of this study, a few examples and com
parisons with other approaches of the sort are included, as
well as some remarks on the effects of creep in concrete under
sustained loads.

v).
!NDICE
Capitulos: Páginas:
. I
II
I NTRODUÇI\O • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • l
HIPÕTESES DE CIILCULO ••••••••••••••••••••••
1.1 Materiais .•..••••...............•.
l. l. l
l. l. 2
l. l. 3
l. l. 4
l. 2
l. 3
l. 3. l
l. 3. 2
l. 4
A ç. o .............................. .
e o nc.Jz..e:to ....................•.•.•.
H).pÕte-0e da-0 SeçÕe-0 Plana-0 •..•..••
Con-0).de~açÕe-0 de Rotu~a •..•••.•.••
Caracteristicas Mecânicas das Se-
ções de C.A ........•.•.•..•.......
Interação Axial Flexão •..•........
Mat~).z de R).g).dez .•.•••..••...••..
In-0tab).lldade •..........••••••....
Carregamento ..•..•......••••......
DESENVOLVIMENTO TEÕRICO •••••••••••••••••••
2.1 Matriz de Rigidez de Membro ......
4
4
4
8
lo
10
l l
l 5
l 6
l 9
20
22
23

Capítulos:
III
2 . 1 . l
2. 1 . 2
2.2
2. 2. 1
2.2.2
2.2.3
2. 2. 4
2.3
2. 3. 1
2. 3. 2
2. 3. 3
PROGRAMA
3 . 1
3. l . 1
3. 1 . 2
3.2
3. 2. 1
3.2.2
3.2.3
3.2.4
Mat4iz de Rigidez T4an-0cendente •.•
Mat4iz de Rigidez pelo M.E.F . .... .
Características Mecãnicas de Membro
Rigidez Secante de uma Seção de C.A.
Cãlculo do-0 E-0604ço-0 Re-0ultante-0 de
Páginas:
23
38
53
53
uma Seção de C.A. .. .. .. .. .. .. . • .. . 59
Rigidez Secante de Memb4o ...••...•
A-0pecto-0 Ge4ai-0 do Conceito de Rig{
61
dez Secante .. .. .. .. . .. • .. . .. .. .. .. 64
Mêtodo Iterativo ...............••.
Anâli-0e de um Ca44egamento Con-0tan
65
te . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 5
Pe-0qui-0a da Capacidade de Ca4ga .. .
C4ite4io de Conve4gência ......... .
AUTOMÃTICO ....................... Sistemas de Referência ............ Si-0tema de Re6e4ência Local ....... Si-0tema de Re6e4ência Global ...... Sub-rotinas Utilizadas ............ Sub-4otina RIGMB .................. Sub-4otina VERIF .................. Sub-4otina ESFOR .................. Sub-4otina SIACO ..................
67
70
71
71
72
80
81
81
82
82
82

Capítulos:
IV
V
BIBLIOGRAFIA
Apêndices:
A
B
SIMBOLOGIA
3.2.5
3.3
3.4
vi.Li
Su.b-lLat{na GAUSS ••••••••••••••••••
Fluxograma Resumido .•......•......
Observações Sobre Resultados Obti
Pãginas:
83
83
dos . . . . . . . • . . • • • . . . . • . • . . . . • • . . . . • 88
3.5 Erros Admissíveis Recomendados ....
EXEMPLOS ............................. . . . . . . 4. 1 Exemplo 1 ......................... 4.2 Exemplo 2 .. . . . . . . . . . . . . . . . . . . . . . . . 4.3 Exemplo 3 .... . . . . . . . . . . . . . . . . . . . . . 4.4 Exemplo 4 . . . . . . . . . . . . . . . . . . . . . . . . .
CONCLUSl'íES E SUGESTÕES ......•.•......••....
.........................................
MANUAL DE ENTRADA DE DADOS DO PROGRAMA .••.
LISTAGEM DO PROGRAMA
...........................................
89
90
90
93
95
98
109
119
Pãginas:
123
_ l 32
1 57

1
INTRODUÇÃO
Devido ao crescente impulso que vem sofrendo as têc
nicas numéricas de resolução de problemas muito complexos pelo
método da rigidez, torna-se possivel uma aproximação do comport!
mento real de estruturas de concreto armado, por meio da substi
tuição de hipóteses simplificadoras, por outras mais corretas.
Nesta perspectiva ê que se insere o presente trabalho, tendo em
vista a anãlise de pórticos planos de concreto armado.
Tanto a impossibilidade de admitir a lei de Hooke P!
ra o concreto (ainda mais quando armado para resistir ãs tensões
de traçio), quanto no caso de estruturas esbeltas, a necessidad•
de considerar a influência do esforço normal na flexão, tem nos
levado ã procura de bases de cãlculo mais realistas.
A relação linear entre tensão e deformaçio dos mate
riais,~ aqui substituida por outra, baseada na formulaçio reco

2
mendada pelo CEB-FIP, de modo a que seja considerada a influên
eia do esforço normal e do momento fletor na definição das carac
teristicas mecânicas das seções de C.A .. Paralelamente, a ma
triz de rigidez linear geometricamente, ê substituída por outra
que leva em consideração os efeitos de segunda ordem decorrentes
da interação axial flexão.
Em consequência das hipóteses acima citadas, torna
-se impossível utilizar o método da rigidez de maneira imediata,
pois como sabemos, o principio da superposição não e mais válido
na análise não linear.
O artificio utilizado para contornar o problema, con
siste na substituição do cálculo não linear por uma sucessão de
cálculos lineares, em que no decorrer de cada passo, as caracte
risticas não lineares de que depende o problema, são mantidas
constantes para posteriormente, com base nos resultados obtidos,
serem modificadas e utilizadas no passo seguinte.
Desta forma, a cada passo, e válido o principio da
superposição.
Devemos salientar que já existem, embora em numero re - . - 1,2,3,'+ duzido, trabalhos que dizem respeito a analises do genero .
O trabalho aqui proposto, embora adote o mesmo conceito de rigl

3
dez secante que o programa "Frame Analysis"
mo em pontos bãsicos, tais como:
matriz de rigidez
correçao da rigidez secante
pesquisa da capacidade de carga
l , 2 , 3 , difere domes
Finalmente, cabe acrescentar que o programa aqui apr!
sentado, limita-se ao estudo de pórticos planos e constituídos
por barras de eixos retos, que podem ser subdivididas em membros
cuja seçãoOtransversal de C.A. pode ter geometria qualquer (nat~
ralmente simêtrica em relação ao plano da estrutura), porêm man ,-,
tida constante ao longo de cada mgmbro.

4
CAPITULO I
HIPÕTESES DE CÃLCULO
1.1 MATERIAIS
A seguir, serao mostrados os diagramas tensão defor
maçao adotados para os materiais de acordo com as recomendações
do CEB-FIP, para posteriormente apresentar quais as considera
çoes mecânicas adotadas para representar o comportamento das se
çoes de C.A ..
l . l . 1 AÇO
Está prevista a utilização de dois tipos de aço:

5
a) Tipo A:
Caracterlza-se pela existência de patamar de escoa
mento definido. Figura 1.
onde:
f yk
f f
yk = yd :--:i :r s
ys
f yd
e: = sy E s
,,. f .,.
-10%0 - tsy
' f ___________ , --
DIA-GRAMA CARACTERÍSTICO_
- ..... - 7- - - - - - - - - - -, / 1
I /orAGRAMA DE CÁLCULO 1: ,1
1 1 1 1
Are tg Es 1 1
tsy
f ,.
- f ,.
10%, E.s
FIG. 1
valor caracteristico da tensão de escoamento
valor de cãlculo da tensão de escoamento
coeficiente de min~ração da resistência do aço

.... 6
< .... ,
b) T .ipo B:
Devido ao encruamento a frio, este tipo de aço nao
apresenta patamar de escoamento definido. Como pode ser obser
vado na Figura 2, define-se uma tensão de escoamento c on ve n'ê:'ro ~-nal mediante uma reta que passe ,ê_§lo ponto e:
5 = 2%o com inclina
çao igual ao mÕdulo de elasticidade tangente na origem.
Cabe notar que o diagrama de cãlculo e obtido do ca
racteristico mediante uma .a-t"Tnid~cl~~r,ãrfle_tl~a-estã~retã êle razão "---~ -- - ,....... . ...-------,- - .. - - -- ,.. -----1 /y ..
0s
.-.:10%0
f , •
f ;. 0,7 f ,. 0,7 f yd
-2 %o .
1 / 1 1 / ,; 1 / 1 / .,~-
+------/-;".,, -,.-_L - -
1_ - - - - - -·- - - - -
FIG. ·2
G •. DIAG. CARACTERi'STICO
--'S;__.----~-~ -, / _I --
- - - 1 - ; / f /:DIAG. DE CÃ~CULO
/ ,; I
Are tg ES / 1
10%. é.s
- 0,7 f :,d
- O ,7 f Jk - f yd
- f ,.

7
O referido diagrama pode ser representado pelas se
guintes expressoes:
l'j O 7 ._gs ~ ' f yd
,......,,.-- ....,,,_ ·--............. } --... _,,__r
e: = s
e: = s
·"2\ V. s
E s
··~ \_~- s
-E s
§ 5
+ 0,823 (-s- - 0,7) f
yd
Como simplificação, foi adotada a substituição do
trecho curvo por três retas, conforme Figura 3.
... .'IOo/oo
f ,. 0,9 f ,.
0,7 ·t yd
_ Es1a _ Esn .Esy, 1 1 1 1 1 1 1
FIG, 3
1 1
. 1
_ 0,7 f yd
- ,01s f yd - fyd
1 1
. 1
10 %o (.s

8
onde:
0,7 f yd e = syl E .s
n f 0~9 yd e = + 0,263%0 sy2 E s
f yd e = + 2%o sy3 E
s
1 . 1 . 2 CONCRETO
Estão previstas no programa apenas as relações entre
- - * tensões e deformaçoes para cargas de curta duraçao , sendo que,
não se considera qualquer resistência a tração no concreto. Fi
gura 4.
O diagrama de cãlculo pode ser rêpresentado matemati ~
camente pelas seguintes expressões:
* Algumas consideraç;es ~eol6gicas podem ser encontradas no Ca pÍtulo V, sob o aspect; de aprimoramento futuro ao trabalho.-

9
d C ( COMPRESSÃO J - ' blAG. CARACTERISTICO
0,86 f ck - ----- - ~-----1 ..... - ,1 .
0 1 85 f cd. - - - -,.. <é_ -· ---<t--------J !I
7 \ DIAGRAMA OE CÁLCULO 1 PARÁBOLA DO
21 GRAU ,L-r/ 1
2%o
,fl 8. 4
-·~--- -
o ,:/; e: e ,:/; 2%o e· ét .,e
2%o~ e: ,:/; e
3,5%0 ~\ '--'e
= 0,85
= 0,85
1 1
3 1!5 o/oo
f cd
f cd
é.. Ô (COMPRESSÃO)
e: e: (2 _f) e -
2%o 2%o
onde:
fck valor característico da resistência a compressao
concreto;
f fck
valor de cálculo da resistência do = a compressa o cd yc
c reto;
do
con

lo
yc coeficiente de minoração da resistência do concreto.
Note-se que o coeficiente 0,85 ê justificãvel pelo
"efeito RÜsch" ou, se for o caso, pelas condições de concretagem.
l. l. 3 HIPÓTESE DAS SEÇÕES PLANAS
r admitido aqui, que as seçoes transversais dos mem
bros permanecem planas e normais ao eixo da peça, com perfeita~
derência entre aço e concreto.
Convêm observar que os efeitos devidos ao esforço
cortante não são considerados, jã que, de momento carecem de teo
ria que possa tratã-los de maneira aceitãvel.
l .L4 CONSIDERAÇÕES DE ROTURA
O esgotamento da capacidade resistente de uma seçao
de C.A. ê considerado segundo as recomendações do CEB-FIP, conse
quentemente as deformações limites são definidas de acordo com
as três principais zonas demarcadas na Figura 5.

11
->-... -- ~~.
1 O o/oo ,O -2%o . ....1,5%0
FIG. 5
1. 2 CARACTERfSTICAS MECÃNICAS DAS SEÇÕES DE C.A.
Uma vez que nao existem relações lineares entre ten
sao e deformação, somos conduzidos a efetuar um cálculo de na tu
reza nao linear física, cuja solução exata e extremamente difí
cil de se obter.
Numericamente, procede-se por sobreposição de câlcu
los lineares, corrigindo a cada passo, as características meca
nicas de cada membro com base nos resultados obtidos na etapa de~
câl cul_o)em questão.

l 2
No caso da nao linearidade física, estas caracteris
ticas ~ão:
Em geral, nos programas de cálculo nao linear, as cor
reçoes sao efetuadas tomando como base uma coleção de diagramas
esforços deformações previamente conhecidos.
Estes diagramas sao:
a) Momento-eu4vatu4a (Figura 6):
M ( MOMENTO FLETOR J
/ /
/ /
/ ~ Are tg EI
··-----
NORMAL c1J
CV (CURVATURA)
FJG.6
b)(''E.16 .. no4mal-de6o4mação na 6-lb4a mêd.la (Figura 7): . . -.

1 3
-~ - - --N· ( ESFORÇO NORMAL)
MOMENTO ,ct.!
---/
1
1
/ 1 /
1 /
Are lg ÊA
( g ( DEFORMA~ÃO AO NÍVEL D O C.G.
OA SEC,AO OE CONCRETO).
'FIG. 7
O conjunto destes diagramas ê sempre grande, jã que,
uma estrutura pode ter vãrios tipos de seções que diferem entre
si, tanto na forma geomêtrica, quanto na percentagem de armadura.
Alêm do mais, para cada valor do esforço normal, um diagrama mo
menta-curvatura deve ser conhecido, bem como, para cada valor do
momento fletor, um diagrama é~for__ç_q_ nqrm__a]'-_d_eformaç_ão:::n.é!... f i ~ r a;
mêdia·deve _ser apresentado.
Objetiva·.n_do, contornar este problema, ~oi adotado um
procedimento numêrico baseado no fato de que tanto o esforço nor
mal, como o momento fletor em seções de C.A., são funções não li
neares cujas variáveis sao cv e E • g
Encarando-se desta maneira, ao invês de colecionar
mos os diagramas, basta que encontremos a solução de um sistema

14
de duas equaçoes nao lineares:
onde:
M (CV, E ) = M r g s
N (CV, E ) = N r g s
M(cv,E) r g
N(cv,e) r g
Momento interno, resultante das tensões in
ternas no concreto e no aço em relação ao
C.G. da seção de concreto.
Normal interno, resultante das tensões in
ternas no concreto e no aço.
M Momento que atua na seção em relação ao ei s
EI =
xo do elemento, resultante da ação da es
trutura na referida seção na etapa de cãl
culo em questão.
N Normal que atua na seçao, resultante da a s
ção da estrutura na referida seçao, na eta
pa de cilcul~ em questão.
Uma vez determinados cv e E ' g
podemos então definir:
M s
M(cv,e) r g
= CV CV

EA =
N 8
E g
= N {cv, E.)
r g
E g
15
Como se observa, em C.A. nao tem sentido considerar
a rigidez secante ã flexão e a rigidez secante ã deformação axi
al, como sendo representadas por produtos Ex I e Ex A, respe~
tivamente, o que sõ e vâlido no caso de linearidade física.
Devemos notar que tudo o que foi dito ate aqui e re
ferente a características mecânicas de uma seção, posteriormente
estenderemos o conceito para características mecânicas de Membro.
l. 3 INTERAÇÃO AXIAL FLEXÃO
No que se refere a nao linearidade geométrica, tam
bem nao seria imediata sua aplicação sem um tratamento numérico,
em que o principio da superposição pudesse tornar-se vâlido.
A seguir, rapidamente abordaremos o assunto, para

l 6
posterior desenvolvimento no capitulo sequente.
l . 3 . l MATRIZ DE RIGIDEZ
Em programas no genero, a matriz de rigidez de mem
bro utilizada e normalmente desenvolvida de maneira aproximada,
através do metodo dos elementos finitos, das diferenças finitas,
etc.
No programa em questão, devido ao conceito de rig!
dez secante de membro, foi possivel adotar uma matriz de rigidez
cuja dedução e feita de maneira "exata" (a nao ser no que d i z
respeito ã rigidez adotada para representar o membro), através
da equação diferencial que representa o fenômeno.
Suponhamos o elemento visto na Figura 8(a), em equ!
librio sob a ação dos esforços A , A , A , A e P. 2 3 5 6
Suponhamos
tambem que ao deformar-se, tenha sofrido os deslocamentos verti
cais (representados no seu interior por v(x)), d e d em suas 2 5
extremidades, bem como as rotações d e d conforme Figura 8(b). 3 6
Se aplicarmos a equaçao diferencial da deformada, en
contra remos:

2 d V(x)
dx 2
onde:
M(x) = -
1 7
--· - -----~
e a J
M(x) =
EI
A + A 3 2
=
X -
X ---F 1 6. ·8
,....., e U.l')V atura
P(V(g1) -
V (X)
e b >
d 2 )
d•
X -
Substituindo-se:
d2
V(x) p + - V(x)
dx 2 EI = (A x + P d
2 2 - A ) x
3
1
EI
r atravês da resolução desta equaçao que a matriz de
rigidez de membro foi deduzida.
Observamos que a ~ndição necessãria para que o pri__l!

18
cipio da superposição seja aplicãvel e que o valor da força P se
ja mantido constante.
Iterativamente, procede-se por sobreposição de cãlc~
los, em que o valor (Jà --foria_àxié!l__)'-' 1obtido em uma etapa para
cada membro, ê então assumido como valor da força P na etapa se
guinte.
,_ .. Assim 0 ·p_ro_c_e·dendo,·,corrigimos_ ao mesmo tempo as cara.s:
teristicas mecãnicas dos membros e os respectivos valores.~a for
·ç a· a x i a l --P •
Devemos observar que implicitamente estamos tr aba
lhando com a teoria de pequenas deformações, caso contrãrio, de 1' ..., ·'"i veriamas a~o:tar:
2 d V(x)
dx2
M(x) Curvatura = =
[, . dV(,) T'' EI ( )
dx
* , For:ç;i> .axia·h em relação a geometria indeformada do- elemento-.

1 9
1 . 3. 2 INSTABILIDADE
Devido is hip5teses fofmuladas, o valor miximo de um
carregamento localizado pode ser limitado por dois motivos:
H = cli ----
a) E-0gotamento da capacidade ~e-0i-0tente de uma -0e~ao
ocorre no caso de estruturas pouco esbeltas, c u j o
comportamento pode ser observado pela curva e ar g a-
flesha exemplificada na Figura 9. (Ver item 1. 1.4).
iF
•-r- - -
1
I 1
1
F
ESGOTAMENTO DA CAPACIDADE RESISTENTE
OEU~
a
1fl 8. 9

1. 4
b}
H=cl.A ---- o
20
InJtabilidade do equilZb4io acontece em estrutu
ras esbeltas, cujo comportamento pode ser observado
na Figura 10, sendo caracterizada quando a derivada
da curva2carga-flecha apresenta um ponto nulo.·
F
INSTABILIDADE .oo EQu1dsR10 ( ~: : ,O)
-- --r--
I I
1
I
CARREGAMENTO
' ' . " 1RAMO INSTAVEL
' ' \ \
'a ESGOTAMENTO DA CAPACIDADE
RESISTENTE OE UMA OU ·MAIS
SEGÕES.
o
FIG. 10
O programa foi elaborado de maneira a que som ente
cargas nodais possam ser introduzidas.

21
Distinguem-se dois tipos de anãlises:
a) Anãlise de esforços e deslocamentos para um carreg!
mento definido.
b) Pesquisa da capacidade de carga da estrutura para um
carregamento inicial, em que podem existir cargas
mantidas constantes e cargas que serao majoradas ate
o estado limite último da estrutura.
Neste tipo de anãlise, podemos analisar o
mento nao linear (esforços e deslocamentos) da estrutura para ca
da incremento de carga ate seu valor mãximo admissivel.
Convém acrescentar que o programa trabalha com con
trole de carga, consequentemente nos casos de instabilidade do
equilibrio, não podemos obter o ramo descendente da curva carga
-flecha (Ver Figura 10). Entretanto, uma versão modificada do
mesmo chegou a ser elaborada para trabalhar com controle de de~
locamentos, conseguindo desta forma obter os dois ramos da curva.
A referida versão do programa não consta dos anais aqui redigi
dos, pois devido ã natureza do processo iterativo, a converge~
eia tornou-se mais lenta.

22
CAPITULO II
DESENVOLVIMENTO TEÕRICO
O capítulo tem em vista, com base nas hipóteses jã
formuladas, apresentar o desenvolvimento dos tópicos de natureza
não linear para imediata aplicação a um programa automiti,co uti
lizando o mêtodo da rigidez.
Considera-se no trabalho em questão, que o referido
mêtodo, devido a seu grande desenvolvimento atual com o uso de
computadores digitais, esteja implicitamente conhecido, juntame~
te com suas aplicações a cãlculos automãticos de estruturas tipo
pórtico plano de comportamento linear.

23)
2.1 MATRIZ DE RIGIDEZ DE MEMBRO
,, -
Em segui da, mos traremos <> processo ill:! li zado na , dedu
çao da matriz de rigidez de membro, através da equação diferencl
al da deformada, para posteriormente fazermos uma comparação com
a matriz de rigidez desenvolvida pelo método dos elementos fini
tos, normalmente empregada em programas desta natureza
2.1.l. MATRIZ DE RIGIDEZ TRANSCENDENTE
Suponhamos o elemento inicialmente reto de comprime~
to L, desenhado na Figura 11 deformado e em equilíbrio sob as a
ções dos esforços A, A , A, A e P. 2 3 5 6
FIG. li
'. p )-
·f A& Ao
X

24
Chamemos de V(x) a função de deslocamentos y, cujas
condições de contorno são os deslocamentos d 2
e
te com as rotações d 3
e d , 6
conforme Figura 12.
ou,
1y
daj,,
d2 V ( x J
F l G. 12
Podemos então escrever:
2 d V(x)
2 dx
p
= (-A + A x - P(V(x) - d )) 3 2 2
1 V"+ V= (A x + P d - A)
EI 2 2 a EI
cuja solução homogênea e:
v .• (x) = e h' ~
COS ~ {P X + C V Ei 2 sen.;-;; x
EI
:1. d6
d5
1
EI
d , 5
X
juntame_!!

25
onde C e C sao constantes que dependem das condições de l 2
contorno.
-, Encontramos pa~a soluçio particular:
V (x)' = (A x + P d p - 2 2 - A ) l
3 p
Desta maneira, obtemos a soluçio geral:
V(x) = C COS- ~ X + 1 Vü e sen- ~ x +
1
2 -VEI p (A X+ p d
2 2 - A )
3
Chamando-se de e(x) a funçio que nos dâ as rotações ~
ao longo do elemento, podemos escrever:
e(x) = --dV(x)
=~ EI -~ (C cos -
2 E I X - C
l sen~ x) + A
2
EI P dx
Ao introduzirmos as condições de contorno para x = O,
obtemos:
V(o) = d 2
. . - . ~) A A
e :+' d 3 ,--··+ 3 - = d e =
1 v 2 v p 2 l p

26
El (O) = d 3
A d A 2 3 2
k.C + - = d + e = 2 p 3 2 k Pk
onde:
k =/!; Finalmente encontramos:
A d p - A l 3 3 2 ) V(x) = coskx + ( senkx + (A X+ p d - A ) p Pk p 2 2 3
( l )
d p - A A A 3 2
e(x) k ( ( 3 2 ) coskx - senkx) + ( 2) = Pk p p
Da mesma maneira, podemos obter a expressao do momen
to ao longo do membro:
2
d V(x) M(x) = ---
2 dx
d3 p - Az EI = - (A coskx + ( ) senkx\)
3 k w~
( 3)

27
Podemos observar que as expressoes acima sao válidas
para P positivo (compressão) e diferente de zero. Nos casos em
que Pê negativo (tração), devemos modificã-las tendo .em dVista
que:._ ,··· . . . ~ . _.,,
sen(ix) = i senh(x) (i = r-,,
cos(ix) = cosh(x)
Substituindo-se, ficamos com:
A d p - A 3 3 2 l
V(x) = coshkx + ( )senhkx + - (A X+ P d - A 3 ) p Pk p 2 2
(4)
d p - A A'J A 3 2 - ' ·03 2 e(x) = k ( ( ) cosh~"°i<) + - senhkx) + (5)
Pk ·- ·P p
d p - A 3 2
M(x) = - (A coshkx + ( )senhkx) ( 6) 3 k
onde:
k =-ff!-EI

28
Os casos em que P = O, deixaremos para mostrar po~
teriormente, entretanto, podemos adiantar que ao aplicarmos o
Joncei tó de 1 imi t~-• enco_n._trar_emos:
Lim V(x) = parábola do 3Q grau rp-+o (:,,
Lim d~,-+0
e(x) = parábola do 2Q grau
Lim M(x) = ,fúnção~li near (P,..o ----· ·~ -- .
..;.,/
Conforme pode ser observado, o principio da superp~
sição pode ser empregado, desde que o valor da força P seja man
tido constante. Baseados neste fato, iremos agora introduzir
os deslocamentos generalizados unitários para a dedução da matriz
de rigidez de membro.
Façamos d = 1 e deixemos iguais a zero os demii~ 3
deslocamentos generalizados, de acordo com a Figura 13.
Ao aplicarmos as condições de contorno para X= L,
temos:
V(L) = O
Substituindo-se em ( 1):

(A coskl + 3
p - A 2
( ) k
29
FIG. 1 3
senkl + A 2
A = 2
P senkl - A3
k(coskl - 1)
senkl - kl
e(L) = O
De (2) temos que:
(/ P - A f,1' .. \.
~,,_'·.; ___ 2_U,,-, D coskl p k
- A senkl) 3
o . . .
1 L-A) =O
3 p
( 7)
A 2
+ - = o

A = 2
30
A3
k senkL - P coskL
1 - coskL
Ao igualarmos (7) e (8), obtemos:
A = 3
p senkL - kL coskL
k (--------)
2 - 2 coskL - kL senkL
Levando-se (9) em (8), encontramos:
1 - coskL A = P (---------)
2 2 - 2 coskL - kL senkL
(8)
( 9)
( 1 O)
Sabemos que neste caso, as expressoes encontradas p~
ra A e A, sao esforços por unidade de deslocamento, conse 3 2
quentemente são os coeficientes da matriz de rigidez de
SM(3,3) e SM(2,3), respectivamente.
membro
,.~
Para que possamos tratã-los de ~orma mais convenien
te, façamos o seguinte artificio:
4kL 4EI SM(3,3) = SM(6,6) = A
3 X -- =
4kL L s
3

31
onde:
kL(senkL - kL coskL) s =
~ = 2 - 2 coskL - kL senkL
SM(2,3) = SM(3,2) = - SM(5,6) = - SM(6,5) =
6(kL)2
6EI = A X = s
2 6(kL)
2 2 2 L
onde:
2 (kL) ( 1 - coskL)
s = 2
6~
Ao aplicarmos as considerações de equilibrio, obtemos
as seguintes :i:onâiç_ões: i ,
A = - A 5 2
( 11 )
A + A = A L 3 6 2
( 1 2)
De (11) encontramos:

32
6EI SM(5,3) = SM(3,5) = - - s
A = 6
2 2 L
Levando-se em (12) as expressoes (9) e (10):
P kL - senkL (---------)
k 2 - 2 coskL - kL senkL
Multiplicando o numerador e o denominador por 2 kL:
onde:
SM(6,3) = SM(3,6) =
s = ~
kL(kL - senkL)
2EI
L
s ~
Tomemos agora o deslocamento generalizado
façamos os demais iguais a zero, conforme a Figura 14.
d = 1 2
Levando-se em consideração que A = SM(3,2) 3
jã
e
e
conhecido, podemos ao aplicar as condições de contorno em X =L,
obter diretamente de (1):

onde:
33
- - _:-:::-:::::--.-):._ p_
f As .
FIG-. ·14
k senkl A = P-----------
2 2 - 2 coskl - kl senkl
3 Multiplicando o numerador e o denominador por 12(kl) :
12EI SM(2,2) = SM(5,5) =
3 L
s 1
s = 1
3 (kl) senkl
1 2 cp
Introduzindo as condições de equilíbrio:

34
A = - A 5 2
( l 3)
A + A = A L + l x P 3 6 2
( l 4)
De ( 13), podemos escrever:
12EI SM(5,2) = SM(2,5) = s
3 l L
,, Substttuindo em (14) a expressao conhecida:
SM(6,2) = SM(2,6) = 6EI
2 L
s 2
Pelo que foi visto, encontramos uma matriz de rigl
dez igual a utilizada em análise linear, sõ que aparecem os coe
ficientes S, /'"I .· c~e~}gnados como coeficientes de estabilidade
R; K. Li V e s l ey ' que caracterizam os efeitos de 2a. ordem
rentes da interação axial flexão.
por
decor
No que diz respeito aos termos SM(l,l), SM(l,4),
SM(4,4) e SM(4,l), podemos considerá-los iguais aos encontrados
na análise linear, pois a menos que estejamos considerando efei
tos de 3a. ordem, estes termos independem da não linearidade ge~
métrica aqui adotada.

35
Podemos então, escrever:
EA EA o o o o
L L
12 E I 6EI 12EI 6EI s s o s s
L3 1
L 2 2
L3 1
L2 2
4EI 6EI 2EI s o s s
L 3 2 2 L ~
L
[sMJ = EA
o o L
12EI CG'.EI SIM. s - -- s
3 1 2 2 L L
4EI s
L 3
Nos casos em que a força Pede tração,·devemos igual
mente ao; jã~-efituado,: expressar os coeficientes de estabilida • ...,..., . . . -~ - ~ - -e
de, por meio de funç~es hiperb6licas:

onde:
s = 1
s = 2
s = 3
s = 4
36
3 (kL) senhkl
124> 1
2 (kL) (coshkl - 1)
64> 1
kL{kL coshkl - senhkl)
44> 1
kL(senhkL - kl)
24> 1
<j>' = 2 ~ 2 coshkl + kl senhkl
k =-JfJ-EI
Para melhor compreensao da função dos referidos coe
ficientes, podemos expandi-los em serie, como se segue:

37
2 4 6
(kL) (kL) (kL) S = 1 -
1 1 O 8400 756000
2 ~ 6
(kL) (kL) (kL) s = 1 -
2 60 8400 756000
( 1 5) 2 4 6
(kL) ll(kL) 7(kL) s = 1 -
3 30 '-2.5200 756000
2 4 6
(kL) l3(kL) 11 ( kL) S = 1 + + +
4 60 25200 756000
Desta forma, observamos que quando à- ~fÕrça_ -ã-xia 1 '
P se an~la, os quatro coeficientes tomam valor unitirio, deixan
do de existir naturalmente o efeito de 2a. ordem. Entretanto,
devido ã forma como foram inicialmente representados, fun·ções tr.!_
g~rlom~tricas ou hiperbÕlicas, os referidos coeficientes podem a
presentar problemas de truncamento para valores do argumento kL
pequenos, pois como sabemos, em computadores digitais os valores
das funções trigonomêtricas e hiperbÕlicas são encontrados atr~~
ves dos seus desenvolvimentos em serie limitados~
mente ê impossivel fazer-se numericamente os limites:
LimSi=l ~+O
i = 1,2,3,4
Consequent~

38
Empiricamente, foi verificado que no computador Bur
roughs-6700 trabalhando com precisio simples, valores de kl meno - 1
res que 10 ji provocam resultados desordenados nos cálculos.
Para tais casos, desenvolveu-se de uma maneira apr~
ximaáa a matriz de rigidez de membro, atravês do mêtodo dos ele
mentos finitos.
2. 1. 2 MATRIZ DE RIGIDEZ PELO M.E.F.
Suponhamos o elementosdesenhado na Figura 15 e adote ~ -
mos ~S-f_~rÍ~õês - w(x). e'-_u_(x} _par_a~·r-ep.!..e~entãr_2~ deslocamentos
)_ ~-a·s dire-çoés y e x, "respe~c__t~vamenfe.
Y,w (x)
X., u (X)
L
FIG. 15

39
Igualmente ao que foi visto, adotemos para represe~
tar os esforços generalizados em suas extremidades o vetor {A},
de acordo com a Figura 16.
A l
A 2
A• ~c~-----,--r A2
A6 A )~ {A} = 3
A
iAs ..
A 5
A 6
·F l,G. 1 6
Para melhor caracterizar o efeito de 2a. ordem, pod~
mos assumir a existência ,._E_a--fo_rJ§-_ax_i,_a_DP, que embora seja i
gual i açao A, deve ser tratado de maneira diferente, conforme l
Figura 17.
p -- ..
1f I G. 1 7
p 4--

40
Podemos agora escolher como funções de· interpolação
de deslocamentos as seguintes expressões:
u(x) = a x + a 1 2
w(x) = a 3
X 3 + a
4 x 2
+ a 5
X + a 6
Aonde a, sao constantes a serem determinadas pelas \ 11 ~
condições de contorno de deslocamentos generalizados {D}, con
forme Figura 18.
d 1 d4 ,-,.; d6
d 2
d {D} = 3
d2 d5 d
4
d • 5
d 6
FIG. 18
Aplicando-se as condições de contorno referidas, en
contramos:
U (X) = ( d - d )
4 1 X + d
L 1

ou,
onde:
41
(d + d ) 2(d - d ) 6 3 2 5 3 w(x) = ( + ) X
L2 L 3
3(d - d ) f21d + d ) 5 2. -.J 3 6 '..:.::,.,: + ( ) X
2 L L
u(x) = d (l - !;) + d !;
w(x)
!; =
1 ~
2 3 3 2 + d (31; - 21;) + d L(!; - !; )
5 6
X
L
+
2 + d X + d
3 2
Com base no que foi visto, podemos escrever
mente a expressão da energia potencial total w:
direta
w = (energia de deformação) - (trabalho realizado pelas
forças externas)

42
L 2
L 2 1 I du) 1 I d2 w
lT = EA (- dx + EI (-) dx 2 dx 2 dx 2
o o
L 2 1 I dw T
p (-) dx - {d} {A} 2 dx
o
No tê-se que a parcela ·~ L 2
1 I dw
p (-) dx 2 dx
o
representa o trabalho realizado pela força P, em consequência da
deflexão do membro. t devido ao aparecimento deste termo que
os efeitos da interação axial flexão serão considerados.
S~ substituirmos as expressoes adotadas para u(x) e
w(x) em lT e, posterformente, minimizarmos o funcional assim en
centrado, obteremos a conhecida equação matricial do mêtodo de ri
gidez:
[sM] {D} = {A}
Aonde, [sMJ sera a procurada matriz de rigidez de
membro.

43
Desta maneira, façamos as derivadas parciais de nem
relação aos seis deslocamentos generalizados.
a)
b)
an
ad'.Y = o
l
EA EA +
an
ad
+
2
d L l
= o
12 EI (--
LI
d = A L ..
6 p - -)d 5 L 2 +
+
1
6EI p l 2E I 6 p (- - -)d - (-- - -)d L2 ] 0 3 Ll 5 L 5
6EI p (- - -) d = A
L2 lo 6 2
Devido a simetria da matriz de rigidez, passaremos
agora a abandonar os termos do triângulo interior da mesma (te~
mos em função de
c) an
ad = o
3
d l
e d ) 2
e assim por diante.

d)
44
6EI + SIM. +
4EI (- -
L
2
15 P L )d - (- -
L 3
2EI PL + (-+-)d = A
L 30 6 3
ª7[ = o
ad 4
EA ... SIM. + - d = A
L 4 4
ª7[ e) = O
ad 5
+ SIM. +
ª7[ f) = o
ad 6
l 2 E I 6 P ,. (- - - -)'d -
L3 5 L " 5
(· 4EI J2
6EI (- -
L2
SIM.+ (- - PL)d = A L l 5 6 6
p -)d ] 0 5
p -)d ] 0 6
= A 5

45
Pelo visto, podemos escrever a matriz de rigidez de
membro sob a forma de uma soma entre duas matrizes:
[sMJ =
EA
L o
12 E I
L3
SIM.
6 EI
4EI
L
EA
L
o
/rr "º'
EA
L
o
12 E I
L3
6 E I
L2
o
o
6EI
2EI
L
o
l 2EI 6EI
L2
4EI
L
+ ("\ u

o
+
ou,
SIM.
Ol'
6 p
5 L
p
10
2
l 5
46
o
o
PL o
o
!' .6'6 P p
10
~
5 L
p PL
10 !3-b
o o
6 p p
5 L l O
2 - - PL
l 5

onde:
47
ia matriz linear ou convencional, independe!
te Aa força axiãT-:- P. > ,. . .... .. -
e a matriz geomitrica, depende apenas·da f~rç~\
axial P. -~-, ~ - . -
A matriz de rigidez assim encontrada, foi utilizada
na maioria dos programas de anãlise não linear de estruturas ti
po pórtico plano de C.A .. Entretanto, embora nao se pareça com
a matriz de rigidez desenvolvi'~ª no item 2.1. l, iremos demonstrar
que a mesma nada mais i que uma aproximação com as mesmas consi ('\
derações que a matriz transcendente inicialmente deduzida. ·~
Procuremos agora apresentar de maneira similar ã ado
tada no item 2.1. l, a nova matriz de rigidez encontrada. Para
tanto, devemos representar os coeficientes de estabilidade, atra
vés de uma soma de parcelas como se segue:
Cã·l culo de S : 1
l 2EI
L3 s =
1
12 E I 6 p
5 L

S = 1 -
Cãlculo de S : 2
6EI s =
2 2 L
. . .
s = 1 -2
Cãlculo de S: 3
4EI
L s =
3
48
2 2 PL (kl)
= 1 -lOEI 10
6EI
2 L
2 PL
60EI
4EI
L
=
p
10
1 -
2 PL
1 5 . :,
(kl)2
60
PL 2
(kl)2
s = 1 - = 1 -3
Cãlculo de S: 4
30EI 30

2EI
L
s 4
2EI s -. -- +
PL
30 4 L
2 2 PL (kL)
= l + = l + ,----60EI 60
49
De acordo com o esperado, notamos que as expressoes
encontradas, correspondem aos dois primeiros termos do desenvol
vimento em série dos coeficientes de estabilidade obtidos em (15).
Devemos observar que a aproximação decorre de assu
mirmos uma parábola do 3Q grau para representar os deslocamentos
w(x), ao invés da expressão exata encontrada para v(x) no item
2.1.1. Porém, baseando-se no fato de que a parábola do 3Q grau
representa de maneira exata a função de deslocamentos y em uma
análise linear geométrica. Adotamos, para manter ~oerência com
a distribuição de momentos fletores ao longo do membro, esta
formulação nos casos em que o argumento kl assume valores meno
res que - 1
10 • ou seja:
2
M(x) = d (w(x)) EI 2
dx = função linear

50
Consequentemente, basta que tenhamos obtido os valo
res de A e 3
que definido.
M(x) =
A 6
para que de acordo com a Figura 19, M(x) fi
FIG. 1 9
(A + A ) 6 3
X - A
L 3
Finalmente, podemos tambem representar as expressoes
(3) e (6) encontradas em 2.1.1, em função do momento fletor atu
ante em cada extremidade.
A = -6
De ( 3) , temos :
(d P - A) 3 2
(A coskl + -----3
k senkl)

51
A (A + A coskL) 2 6 3 k
d = 3 p
M(x) =
senkL p
Substituindo em (3), vem:
(A + A coskL) 6 3
senkL senkx - A coskx
3
Da mesma forma, obtemos de (6):
(A + A coshkL) 6 3
M(x) = ------- senhkx - A coshkx 3 senhkL
Em resumo, mostramos o quadro a seguir, com a formu
lação adotada em cada caso.

p > o (compressão) p compressao
- 1 traçao _1
kl ~ 10 kl < lo
( k L) 3 senkl PL 2
s = s = l - --1 12<j> 1 l O EI
(kl) 2 (1 coskl) 2 - PL
s = s = l - --2 6<1> 2 60[1
kl(senkl klcoskl) 2 - PL
s = s = l - --3 4<1> 3 JOEi
kl(kl senkl) 2 - PL
s = s = l + --4 2<j> 4 60EI
(A +A coskl) G 3
(A +A) G 3
M(x)= senkx-A coskx M(x) = senkl 3 L
<I> = 2 - 2coskl - klsenkl
k = -J; EI
ou
x-A 3
p < o (tr~Íão) kl ~ 10
(kl) 3 senhkl s =
1 l 2 <1> '
2 (kl) (coshkl - l )
s = 2 6<1> •
kl(klcoshkl - senhkl) s =
3 4<1> 1
kl(senhkl - kl) •
s = 4 2<j> 1
(A +A coshkl) G 3
M(x)- senhkx-A)coshkx senhkl 3
<I>' = 2 - 2coshkl + klsenhkl
k = -fP. EI
"' N
.J

53
2. 2 CARACJ_ÉR!STICAS MECÃNICAS DE MEMBRO
,. ,No item sequente, apresentaremos o processo adotado ,.,
para considerar o efeito da nio linearidade física, juntamente
com as considerações de equilíbrio de cada seçio de um membro de
concreto armado.
Posteriormente, mostraremos o procedimento empregado
para encontrarmos a rigidez secante i flexio e a rigidez secante
i deformaçio axial representativas de um membro.
2. 2. 1 RIGIDEZ SECANTK DE UMA SEÇÃO DE C.A.
Partindo das considerações de equilíbrio, podemos e~
contrar a rigidez secante ãs duas principais solicitações
normal e momento fletor) de uma seçio de C.A •• Para tanto, ir!
mos procurar qual a curvatura (cv) e qual a deformaçio ao nível
do centro de gravidade da seçio de concreto (E), que irio fazer g
:""e
com que os esforços resultantes dos materiais constituintes, se V
fam iguais aos esforços solicitantes.
Suponhamos uma seçao de concreto armado submeti d a
aos esforços solicitantes N e M conforme Figura 20. s s

54
y
FIG. 2 O
Para que seja encontrado o equilíbrio, deveremos ter
os esforços internos
tantes, ou seja:
N:(cv, e:) e Mf,(cv, e:) iguais aos solici ,r, g r g
onde:
J A
e
E= E + CV X y g
N(cv,e:) r g = J A
e
J = M(cv,e:) r g
A e
ã (e:)dA + e e
y & (e:)dA e e
NFS
l &, (e:)A . = N ( 16) S 61 8
i=l
NFS
l / ·~,
+ y â· (e:)A . = M / S S 1 s
i=l
dA e
representa a integral de area ao longo da seçao
de concreto.
ó(e:) e
tensio no concreto sob a deformaçio e:.

55
tensão no aço sob a deformação E.
A • S1
area de aço no nível i.
NFS numero de níveis de armadura.
• . r / •
Pelo visto, nossa dificuldade resume-se em e_ncJ)_nt_rar
os valores de cv e E que satisfazem ã (16). g
Objetivando solucionar este problema, utilizou-se o
método numérico de Newton-Raphson para a resolução do
sistema de duas equaçoes não lineares.
referido
Desenvolvendo as funções N (CV' E ) e M (CV' E ) em r g r g
série de Taylor em torno a um ponto conhecido (cv, E~), encontra g -
mos ao desprezar os termos de ordem superior, as seguintes equ~
çoes:
N N ( cv, E:o l aNr(cv, Eg) ;;.) " aNr(cv, Eg)
= + ,SC\I; + !iE s r g g acv êv dE E
g g
( l 7)
M M (cv. E---i aMr(cv, Eg) aMr(cv, Eg) ., = + ,SCV + ,SE
s r g g acv CV dE E
g g

56
Se levarmos em consideração que o valor das quatro
derivadas parciais que aparecem no ponto (cv, Eg) podem ser obti
dos aproximadamente por:
variãveis
acv
a e: g
acv
ae: g
Onde .,, ... CV e
CV õCV
= e; ôe:
g g
= CV
e; g
ôCV e
6CV
6e: g
sao pequenos acrêscimos dados - -t> respectivamente, no ponto (cv, e;).
g
as
Observamos que o sistema linear obtido em (17), pode
ser agora resolvido para as incógnitas ôcv e oe:g.

57
Feito isto, devemos repetir a operaçao anterior, so
que o pp,nto em torno do qual se desenvolvem as funções
ser (cv, E ), onde: g
-CV = CV+ ÔCV
• e: = e: + ôe: g g g
d e v e rã
Repetimos o processo atê que o ponto assim determina
do, seja aquele que a menos de um erro admissível; satisfaça ao
s is tema ( 1 6 ) .
Foram adotados no programa, os seguintes valores p~
ra t.cv e t.e: : g
t.cv = CV X
sendo H a altura da seçao.
Devido ã rãpida convergência do mêtodo, foi verifica
do que em media três a quatro iterações são necessãrias para ob 5
termos um erro inferior a 10- , ou seja:

58
Uma vez encontrados os valores de cv e E que satis g
fazem as condições de equilíbrio, podemos então definir os valo
res das características mecânicas da seção:
M M (cv, ~ ) s r g
EI = = = ~
CV CV
" N (CV, N E ) s r g EA = =
= = E E g g
t conveniente observar que o método de Newton-Raphson,
por ser de convergência local, é muito sensível quanto â escolha
do ponto inicial (cv, E). g
Apõs o conceito de rigidez de membro, voltaremos ao
assunto demonstrando qual o critério adotado na escolha d este
ponto.

2.2.2
59
CÁLCULO DOS ESFORÇOS RESULTANTES DE UMA
SEÇÃO DE C.A.
Descreveremos a seguir o método numérico utilizado
para calcular os esforços resultantes de uma seção de C.A., sub
metida a uma curvatura cv e a uma deformação ao nivel do C.G. da
e: • g
O referido cálculo pode ser separado em duas etapas:
a) Cálc.ulo doJ.i e1.i60Ji.ço1.i Ji.e1.iul.tante1.i da 1.ieç,110 de c.onc.Ji.eto.
O artificio empregado consiste em dividirmos a seçao
de concreto em faixas cujas ãreas são calculadas e supormos que
existe deformação constante, igual ã deformação no seu nivel me
dio, atuando em toda sua altura. Para~melhor compreensão, ob
servemos a seçao apresenta~a na Figura 21, dividida em n faixas
e submetida a um par qualquer (cv, e:): g
A. areada faixai Cl.
e:. deformação média atuante na faixai l.
yi distância entre o nivel médio da faixai e o C.G.
da seção de concreto medida segundo o eixo y.

/~ - ,. ( ) 0).~ e: . ' e 1
.60
y
'""'""'""--+----_-_--!_ - - =rv i - - -
CG
Ac1
FIG. 21
Mediante esta aproximação, podemos calcular a tensão
suposta constante ao longo de cada faixa, para posterio!
mente encontrar as contribuições de esforços correspondentes a
cada uma delas.
Desta maneira, transformamos as integrais apresent!
das em (16), em somatõrios:
I A
e
I A
e
ifi (e: )dA " e e
n
l ,; ';
A • X (Jlf ( e: . ) C1 C 1
i=l
n
l y. x A. x a)(e:.) 1 C1 ·'C 1
i=l

61
Este cálculo e imediato, pois a area e a posição das
camadas de aço são conhecidas, faltando apenas encontrar a defor
mação ao nivel de cada posição, para mediante o diagrama de cál
culo encontrarmos suas tensões correspondentes.
2.2.3 RIGIDEZ SECANTE DE MEMBRO
De acordo com o que foi visto no item 2.2.1, podemos
notar que um membro de concreto armado, submetido a esforço nor
mal constante é a momento fletor variável ao longo de seu compri
mento, tem para cada seção valores diferentes de EA e EI
tes.
secan
Para que possamos encontrar valores representativos
das caracteristicas de membro, devemos consequentemente.adotar o
valor medio de cada rigidez secante.
Foi então desenvolvido o seguinte processo:
Suponhamos o membro desenhado na Figura 22, com EA(x)
e EI(x) variando a6 longo de seu comprimento. ,/.

L
X ----
62
FIG .22
fy 1 ÊI (x 1~
-+---L
X ---
A maneira mais correta de obter seus valores médios
(EAi e Eii) é mediante as seguintes expressões:
L
f EA(x)dx
EA. o =
1
L
L
f EI(x)dx
EI. o =
1
L
i indica o membro em questão.
Na prãtica, adotou-se calcular o valor das caracte
rísticas mecânicas em cinco seções e obter o valor das integrais
através da fÕrmula de Newton-Cotes para cinco pontos:

63
L
f f(x)dx = !L
90 (7f + 32f + 12f + 32f + 7f)
1 2 3 ~ 5
o
Cabe notar que esta fórmula equivale a passar pelos
5 pontos determinados, uma parãbola do 4Q grau e integrar.
Finalmente, devemos observar que no item 2.2.l, ao
ut1lizarmos o mêtodo de Newton-Raphson, precisãvamos, para ini
ciar as iterações, de um ponto de partida (cv, E ) que, para g~ g
rantir a convergência não poderia ser muito distante da resposta.
Com o intuito de contornar este inconveniente, ado
tou-se o seguinte critêrio de escolha inicial:
CV =
e; g
=
j-1 EI.
1.
j N
s
j-1 EA
i
j indica a etapa de cãlculo
i indica o membro

onde:
j-1 EA.
1
j j M e N
s s
2.2.4
64
rigidez secante ã flexão do membro em que a se
ção está localizada, obtida na etapa de cálculo
anterior.
rigidez secante. ã deformação axial do membro em
que a seção está localizada, obtida na etapa de
cálculo anterior.
esforços solicitantes na etapa de cálculo em que~
tão.
ASPECTOS GERAIS DO CONCEITO DE RIGIDEZ
SECANTE
Sabemos que em programas de análise linear, ou mesmo
nos programas em que a nao linearidade física é levada em conta, "' po'r'ém com seçoes homogêneas, os valores das características meca
nicas sao sempre positivos. Entretanto, tal não acontece qua.!!
do trabalhamos com seções de concreto armado.
Este comportamento, embora raro, pode ocorrer no tr~
balho que apresentamos. Sendo que, sua Ünica consequência é a

65
de tornar a matriz de rigidez global nao mais definida positiva.
Porem, nenhum problema de convergência ê encontrado.
2.3 M[TODO ITERATIVO
Em seguida, apresentaremos o metodo iterativo jã des
crito anteriormente para a obtenção de um ponto da curva carga
flecha não linear de uma estrutura submetida a um carregamento
constante, para no item seguinte, utilizã-lo no processo iterati
vo incremental adotado na pesquisa da capacidade de carga.
2. 3. 1 ANÁLISE DE UM CARREGAMENTO CONSTANTE
O referido metodo iterativo, pode ser melhor visuali
zado pela Figura 23.

i Fo
~
1
1 1
1
1 a• T
1 1
\
onde:
\ -
i d
Fo
F
66
ÓI
FIG. 2 5
º'
~ DIAGRAMA CARGA
FL·E·CHA REAL
o n = a•
,K + função de EI, EA e P de cada membro.
. '
·'
Devemos salientar que a matriz de rigidez inicial do
processo, e montada com os seguintes valores para os parâmetros
não lineares:
p. = o 1

67
-10 N .(0,10 ) ri
EA. = 1
-10 -10 M .(10 /yb, 10 ) r1
E I • = 1 _ 1 O
1 O /yb
i = 1, numero de membros.
Sendo yb a distância do centro de gravidade da se
çao de concreto ã borda inferior da mesma.
2.3.2 PESQUISA DA CAPACIDADE DE CARGA
Nas anãlises em que a pesquisa da capacidade de car
ga e solicitada, o programa trabalha com o fator de carga À, que
vai alterando o valor das cargas variãveis atê que seja atingida
a capacidade de carga da estrutura, a menos de um erro
ve 1 •
admissí
Em tais;casos, ao iniciarem as iterações para carre e
gamentos posteriores ao primeiro ·valor/' de carga, a matriz de ri
gidez inicial, ê aquela obtida quando existe convergência no
vàlor/de carga anterior, conforme Figura 24.

À., H ----J N = etc
I I
º F 1
1
I I I
,Â_
J\. MAX. Às
.71. '
68
FIG. 2 4
K
1K = f ( EA,EI,P)
1
1
1
Para melhor compreensao do processo incremental, a
presentamos o fluxograma esquemãtico para a obtenção de
onde:
À max
des incremento do fator de carga (inicialmente igual a
0,25)
IFIN indice que indica que a capacidade de carga da es
trutura jã foi ultrapassada em algum ~alor de car
regamento.
dtol erro admissivel no valor de .X mãximo.

A = 1
DÊS = O, 25
1 F I N = O
A= À+ DES
69
s
IMPRIMIR MENSAGEM
IFIN :11F1N·+
OE S = DES / 2
]\ = ]\ - DES
]I. M ÁX = i\_ FIM

2. 3. 3 CRIT~RIO DE CONVERGÊNCIA
Admite-se que a convergência do processo
foi atingida, quando:
iterativo
'j j- l' j-1 ,;,
j EA. - EA. ~ EA. X tol
1 1 1 '.•
"' t.,) j-1 j-1 j
E I . - E I. ~ E I. X tol 1 1 1
onde:
i representa o membro (i = 1, numero de membros)
j representa a iteração em questão.
tol erro admissível na convergência.
força
Convém acrescentar que a convergéncia em relação a
a,x,ial I P. de cada membro, é sempre obtida com a verifica 1
ção anterior, pois seu valor atua na matriz de rigidez de membro,
consequentemente, também interfere nos esforços 0 obtidos nas ex
tremidades dos elementos e na distribuição de momentos fletores,
fazendo com que os valores de EA. e EI. se modifiquem. 1 1

71
CAP!TULO III
PROGRAMA AUTOMÃTICO
Com base na teoria exposta, foi elaborado um progr! . .
ma automático em linguagem FORTRAN, adaptado ao computador Bur
roughs-6700.
3.1 SISTEMAS DE REFERtNCIA
O programa utiliza dois sistemas de referência:
a) Sistema de Referência Local{;
b) Sistema de Referência Global.

72
3. l . l SISTEMA DE REFERÊNCIA LOCAL
Este sistema e fixo em relação a cada membro, confor
me Figura 25.
Devemos ressaltar que o sentido do eixo x, definido
pela incidência do membro (nÕ j para nõ k), deverã ser sempre com
o nGmero do nõ k maior que o nGmero de j.
O sentido do eixo y, ê definido ao fixarmos o eixo z
sempre voltado para o observador, pela regra do triedro direto.
r ~---------------~---· .. , --X
NÓ J NÓ 1(
Ff6. 2 5
Tanto as liberações introduzidas nos membros, quanto
as açoes generalizadas da estrutura nas extremidades de cada ele
mento, deverão seguir este sistema de referência, com a
ção da Figura 26.
numera

73
3 6
FI 8. 2 6
Devemos tambêm observar, que a definição da seção
transversal dos membros, ê feita segundo o eixo y, passando sem
pre a origem (eixo do membro), pelo centro de gravidade da seção
de concreto. Figura 27.
y y
X -- ------------ ............. .
K
,FIG. 2 7

74
Entretanto, para facilitar a entrada de dados, o usu
ãrio poderã, ao definir a seção transversal de cada membro, ado
tara origem em qualquer ponto (por exemplai borda inferior da
seção, conforme Figura 28), que o programa efetua automaticamen
te, a transferência das coordenadas para o C.G. da seção de con
c reto.
Y'
H
l FIG. 2 8
Tendo em mente esta facil i.gade, podemos apresentar o
procedimento para definir as seções transversais de concreto ar
mado de cada membro:
a) Se~ão de eone~e~o:
A definição ê feita por pontos, escolhidos no senti
do crescente do eixo y', sendo que, para definir cada ponto, de
vemos fornecer a largura Ütil de concreto ao nivel do ponto e o
respectivo valor da ordenada y'.

75
r importante observar que apenas os pontos em que o
correm descontinuidades de variação da largura útil d! seçao, de
vem ser considerados. Ou seja, para a seçao da Figura 28, ªP!
nas os pontos com y' = O e y' = H, bastam para a caracteriza
çao da seção de concreto.
No item 2.2.2, foi verificado que para efetuarmos as
integrações numêricas, objetivando encontrar os esforços resul
tantes da seção de concreto, deverfamos dividir a seçao em fai
xas.
O numero total destas faixas ê variãvel e fica a cri
têrio do usuãrio sua distribuição. Para tanto, foi adotada
sub-divisão em zonas, conforme Figura 29.
y y,
.----+---~------------- p!.116 ZONA 5
-------------- p!Jle
ZONA 4 p !JI 4
CG ZONA 3
- - - - - - - - - - - - - - - - ! ptl3 _____ ~O!_A !_ _______ 1PLP2
ZONA 1
~----'-------------
F 1 8. 2 9
a

76
ou seja:
Zona i está localizada obrigatoriamente entre os po~
tos i e i+l.
O numero de faixas em que se quer dividir cada zona,
deverá ser dado pelo usuário, posteriormente ao fornecimento dos
pontos que definem a seção de concreto.
A titulo informativo, foi verificado que com o nume
ro total de faixas em torno de 15, obtemos resultados satisfatõ
rios.
b) A~madu~a:
A definição e posicionamento das camadas de aço C.A.,
deve ser feita segundo o mesmo eixo y', sendo que, para cada ca
mada, devemos fornecer o valor da ãrea de aço e a respectiva or
denada. Figura 30.
Apresentamos a seguir um exemplo completo para~ me
lhor assimilação do que foi exposto:
Seja a seçao vazada da Figura 31.

70cm
•
•
•
t
77
', y
-. - -
• • •
CG •
FIG. 30
5 o cm------,,. ---'!.~----
y,
có • cá!! 4
e d.o. s
e li.a 2
e da
t-• cm
-t-15cm ;..•2.212an1'- 20 cm --t +
,1!5cm
+ -t--- 25 Cm --"!e-
FIG. 31
T 5cm -',e-
Ao 11 ·• o cm2
As II rscm2

78
Definição da seçao de concreto:
y Y'
r------+------, - - - - - - - - - - - - 5 ( b = 50 ; .,. '70)
24 .- 4 FAIXAS
~--4----,--------23- 1 FAIXA ___ 4 ('b=44,64,y':55)
3 ,(b=24,64;y'=5o)
Z2 .... 7FAIXAS
Zl-4FAIXAS
~----~-------------- 1 (b=2•; y' •o)
F ·I G . 3 2
Sendo b largura útil de concreto ao nivel y'.
r interessante observar que os pontos 3 e 4 têm o
mesmo y', pois a este valor de ordenada, existe descontinuidade
na largura Ütil da seçao.
3 com altura nula.
Consequentemente, foi gerada a zona
Em tais casos, devemos adotar como valor do numero
de faixas nesta zona, o menor possivel, porêm, niu· pode ser zero.

79
Definição das camadas de aço:
y y,
© ( A1 = 1 O y, = 6 5)
1 •
1
--10 ( A, = 15 Y' = 5)
f,1 G. 3 3
l -
Devemos finalmente acrescentar, que este mêtodo de
definição da seção transversal, ê exato para seções cujo contor
no ê constituído por retas. Nos casos de seçoes cujo contorno
ê curvo, devemos inicialmente aproximar as curvas por poligonais,
para posteriormente definirmos seus pontos.

80
3. 1 . 2 SISTEMA DE REFERÊNCIA GLOBAL
Este sistema, conforme Figura 34, e fixo com o senti
do do eixo z voltado para o observador, sendo que, as restrições
de apoio, as coordenadas e os carregamentos nodais deverão ser a
ele referenciados, bem como, no que diz respeito ã saida de re
sultados do programa, tambem os deslocamentos nod~Js e as reaçõ;es
de apoio aparecerão em relação a estes~(&;, cuja convenção de
sinais aparece na Figura 35.
y
X
z
FIG. 3 4

81
k ~ L CARR'EG. ~ ROT. Z E Mz
REAÇÕES DE APOIO RESTR. OE APOIO DESLOCAMENTOS
F I Q. ! 5
3.2 SUB-ROTINAS UTILIZADAS
Apresentaremos a seguir as sub-rotinas utilizadas, p~
ra posteriormente desenvolvermos o fluxograma resumido do progr~
ma.
3. 2. 1 SUB-ROTINA RIGMB
Esta sub-rotina gera a matriz de rigidez de membro,
utilizando os parâmetros não lineares EA, EI e P, de acordo com
o resumo apresentado em 2. 1.2, para posteriormente, quando for o
caso, introduzir as modificações necessârias ãs liberações nos
membros.

82
3.2.2 SUB-ROTINA VERIF
la sub-rotina que corrige os valores de EA e EI do
membro em questão, através do método de Newton-Raphson e da fÕr
mula de Newton-Cotes, verificando se houve rotura em alguma se
çao. Por intermédio do indice contador NMNC avisa ao programa
principal, se foi ou não obtida a convergência no referido mem
bro.
3. 2. 3 SUB-ROTINA ESFOR
Esta sub-rotina ê chamada pela sub-rotina VERIF, p~
ra por intermédio dos valores de cv e e , fornecer os valores de g
3.2.4 SUB-ROTINA SIACO
l chamada pela sub-rotina ESFOR, com o objetivo de
fornecer, através da deformação especifica em cada camada de aço,
o valor da respectiva tensão.

83
3. 2. 5 SUB-ROTINA GAUSS
t chamada pelo progr,ama pri nci pa l, para resolver o
sistema de equaçoes e assim obter os deslocamentos nodais.
Observe-se que o método empregado ê o de Gauss, adaR
tado para trabalhar com a matriz de rigidez armazenada de forma
retangular com os termos da semi-banda superior.
3.3 FLUXOGRAMA RESUMIDO
Apresentamos o fluxograma do programa automãtico, a
onde:
NLS numero de anãlises a serem efetuadas com a estrutura.
INT indice de iteração (numero mãximo = 25).
M numero de membros.
A fator de carga (ver item 2.3.2).
des incremento do fator de carga (ver item 2.3.2).
dtol erro admissivel no valor de Amax (ver item 2.3.2).

84
G
(c~rcnro o• ,c.aw1) •
c11rr 1:11eto1P
Illll.= l'Si?
81---------... ----'-----
o- ' 111 r 2
ClfllWCl.Ell\2l.lClf2 011 E2l.llíll.íllllf
rEll.OIH E lv.lbllEc!2l! O D1f2

85
9 ' CALCULO OÉ
MONTAGEM DE
[ s J
CALL GAUSS
(e Á L e u L o DE {d})
8-- J: = 1,,M

': 86
I CALCULO OE
CALL VERIF
GoRRIGJft {EA}E{E:i:}')
ROTURA J.
CORRIGIR
0
f
0
REOUZIIR O
VALOR DE
À
IMPRIMIR
MENSAGEM
,CALCULO DE
{AR}
'. @

IMPRIMIR
RESULTADOS
CONTINUE
87
1
8
AUMENTA'R O
VALOR OE
"-
s
\
FIM ]

88
3.4 OBSERVAÇÕES SOBRE RESULTADOS OBTIDOS
Cabe acrescentar, que nos programas em que a nao li
(nearida,de física nao e levada em conta, podemos facilmente desco ·~-- - ~.__,,, . ........,..
brir se estamos diante de um carregamento acima daquele conside
rado comb crTtico, atravis da inspeção dos sinais dos autovalo
res da matriz de rigidez durante o processo iterativo. Caso e
xista troca de sinal em algum deles, trata-se de um carregamento
acima do crTtico, caso isto não ocorra, estamos com o valor da
carga abaixo da crítica.
No trabalho apresentado, nao podemos saber com') esta
facilidade, pois devido ã não linearidade dos materiais e as con
siderações de deformações limites, podemos obter rotura localiza
da em algumas seções antes que ocorra a troca de sinal em algum
autovalor, quando diante de carregamentos pouco acima do crítico.
Consequentemente, só podemos saber se o que limita um
determinado carregamento localizado e variãve1 ia instabilidade
do equillbrio ou rotura localizada em alguma seção, se observar
mos a inclinação da curva carga deslocamento que provoca insta
bilidade. Se a tangente estiver próxima de zero, e um caso li
mitado por instabilidade, quando sua inclinação i pronunciada, e
o caso de rotura por ultrapassar as deformações limites.
Outra maneira mais segura, seria atravis dos diagr!

89
mas de iteração das seçoes mais soliciladas da estrutura. Caso
o carregamento mãximo fornecido pelo programa, provoque esforços
solicitantes próximos dos obtidos pelos diagramas de iteração,
sabemos que estamos diante de limitação por rotura localizada em
uma ou mais seçoes. Se is;o nao ocorrer, podemos afirmar que ê
limitação por instabilidade do equilíbrio.
Devemos também salientar, que nas anâlises em que a
carga mãxima ê limitada por instabilidade do equilíbrio, o nume
rode iterações necessãrio para a obtenção da convergência na
carga mãxima ê sempre grande, maior que 15 na maioria dos casos,
com erro admissível no valor de A < 0,01. max
3.5 ERROS ADMISSIVEIS RECOMENDADOS
Nos casos prâticos usuais, os seguintes valores sao
recomendados:
tol = 0,005 (ver item 2.3.3)
dtol = 0,01 (ver item 2.3.2).

90
CAPITULO IV
EXEMPLOS
4. l EXEMPLO l
O exemplo que apresentamos, tem em vista o estudo da
convergência em relação ã discretização. ~,ara tanto. foi adota
da a coluna engastada em uma extremidade, submetida ao
mento representado na Figura 36.
carreg~
t suposto que a carga vertical ê mantida constante e
a for~a horizontal H ê majorada atê a capacidade de carga da es
trutura.
Para o estudo em questão, foi adotada a discretiza
çao da coluna em 1, 2, 3, 5 e 10 elementos de comprimentos iguais.
Os diagramas carga flecha obtidos, estão desenhados na Figura 37,

91
1128 t A-A•
* 4cm
-t+
r a
7" t / 40cm
I t' I I 2
I • 40 Cin ,, 15, 1 cm 400 cm ' ' I
I f •• • ••• KGF / cm2
A ff
IKGF/ cm2
f 'd • 4200
A!;O TIPO A
FIG. 3 6
--- ------
juntamente com os valores da carga horizontal mãxima e seus res
pectivos valores de flecha mãxima.
Em relação ã capacidade de carga, podemos notar que
com 2 elementos, jã eij'contramos diferença menor que 1% no valor
Entretanto, no que se refere aos deslocamentos corres
pendentes, podemos observar que a partir de 3 elementos, jã obte
mos um bom grau de refinamento de resultados.
t interessante comentar que o exemplo aqui apresent~
do, tambem foi analisado por Luiz Ferrraffi:lo Taborda Garcia 5
e P~ 1
lo programa "Frame Analysis" , com os seguintes resultados:

H ( t j
1
6
5
4
2
V
H
/ '/
'/ /
max
6,89
6 ,80
/ /
2
/ •
fá) ·· ..... max
6,36
6,20
3 4
Luiz
F.A.
92
2 ELEM'ENTOS
H MAX. a MAX.
6 1 B 7 9 6. 10 10 ELE-M ENTOS
,6, 8 86 6, 07 5 ELEMENTOS
,s 1 9 06 6 1 00 3 ELEMENTOS
,s , s ! e 5 ,89 2 ELÉMÉ.Ntos
7 1 1 1 1 5 , 3 7 1 'ELEMENTO
R E F. 10 ELE M.
O, ·I O% -o, 49% • ELEMENTOS
o 1 39% - 1, 64% 3 ;ELEMENTOS
o 1 86% -3,44% '2 IELEM·ENTOS
3 1 37% - 11, 97 % 1 ELEMENTO
• ·6 1 a ( cm 1
f' 11 ·G • 37
.~. ___ ,,,,
QUADRO COMP.ARAJIVO ._.---~-
5 Fernando Taborda Garcia
l - K. AAS Ja.k·obsen

93
4.2 EXEMPLO 2
Neste exemplo, será efetuada uma comparaçao entre os
resultados teõricos obtidos pelo programa, com os resultados ex
perimentais encontrados pelo Laboratõrio de ZÜrich 3
A estrutura analisada encontra-se desenhada na Fig~
ra 38, sendo que, para a análise teõrica, apenas meia coluna foi
estudada, com as considerações de simetria.
A comparaçao pode ser visualizada, pelo diagrama ca!
ga flecha apresentado na mesma figura, aonde o carregamento P e
crescente atê a capacidade de carga da estrutura.
Apresentamos também, o diagrama carga flecha forneci 3
do pelo programa "Frame Analysis" , igualmente, através da ana
lise de meia coluna, por simetria.
t interessante notar, que o numero de elementos uti
lizado na discretização da estrutura, quando na análise pelo pr~
grama "Frame Analysis", ê superior ao adotado no programa apr~
sentado. Isto se deve, ao referido programa utilizar a matriz
de rigidez desenvolvida em 2.1.2, e supor a existência de apenas
uma seçao por membro, para efetuar a correção dos valores das ca
racteristicas mecânicas de cada elemento.

p ( t)
25
20
15
I 10
, 1
94
ANÁLISE EXPÉRIMENtAL - ( LAã. õE ZÜftlCH}
-----=~'J!'<. li.- "' ,.,_...,.,.,, T,./
/,,/, PROGRAMA FRAM'E ANALYSIS-.....:... 6 ELEM.ENTOS ,j/ ~~~~~~~~~~~~~~~~~~~~~ ., . ~,
·1,r "-.. PROGRAMA APRESENTADO 3 ELEMENTOS
I , 1/
I
2 3
p max
24,2t
24,16t
24,29t
1
1 I
la 433 em
1
\ \
A
4
â' -max
4,90cm
6,20cm
5,07cm
5
AÇO TIPO A
fcd
20
l A'
t-- 1 ••"'----.+- !, 14_-cm2 _
6 7 e 9 ,o a ( cm J
F 11 G. 3 8
QUADRO COMPARATIVO
Análise Experimental 3
Programa "Frame Analysis"
Programa Apresentado
3
= 302 KGF/ém2
_2 = 4610 KGF/Cffl
-----~--·-

95
Finalmente, devemos comentar que os resultados teõr!
cos obtidos, muito se aproximam dos experimenta"(s::. sendo que, P!
ra cargas próximas a carga máxima, ê verificada a tendência de
exagerar os deslocamentos.
Este fenômeno pode ser explicado, talvez por despr!
zarmos a resistência ã tração do concreto.
4.3 EXEMPLO 3
Apresenta-se neste exemplo, uma compª~~'ão entre os
resultados obtidos por K. AAS Jakobsen 1 , Luiz Fernando T. Gar
eia 5 e o programa apresentado, quando na análise do pórtico bi
-rotulado desenhado na Figura 39.
O carregamento vertical ê mantido constante, e o ho
rizontal e acrescido atê a carga máxima admitida pela estrutura.
Para a análise em questão, cada barra do pórtico foi
discretizada em 3 elementos iguais. Podemos adiantar que igual
procedimento foi adotado por Luiz F.T. Garcia, porem, nenhuma r!
ferência ê dada por K. AAS Jakobsen em relação ã discretização.

H
96
t 12a t --------~!.-12 e t --'l----------603 cm ~
A --- +-40cm-+
a ----! ' ~ -- - -- A•.l..,,.
~· 4cm
IH ----- r, 60 cm ,
2. ·1 1
116 17cm ,
J 1 1 J
t tt
!'' + 1 ar/. 303 cm
I
I
>--<--< (:l' I
I
40cm
---j.-40 cm-+ 15 1 cm2 t
FIG. 3 9
- -
f Cd 230 k.GF/1cm 2
f •• 4200 KGFLcffl2
AÇO TIPO A
Como pode ser observado na Figura 40, os resultados
encontrados se aproximam dos obtidos pelos dois outros programas,
saliente-se que o programa apresentado e o programa "Frame Ana
lysis", encontram a inclinação do diagrama carga flecha prÕxima
de zero quando na carga Última, ao passo que o programa de Luiz
F.T. Garcia, ainda obtém pequena rigidez para cargas prõximas a.
carga mãjJm_a, _ • . ,
Esta diferença entretanto, pouco representa, podendo
ser justificada pelas aproximações feitas na elaboração dos trés . . .
processos, jã_ que, a estrutura apresenta quase que simultaneamente
-t

10
2,5
H ( t)
/
/
/
/
/
Hmax ({ f)l
/ /
/
9,37lt
10,000t
9,478t
/ /
/ /
2
.._ ....
/
a·1 . ··max ·if};
/
5,25cm
5,46cm
5,00cm
" '/
3
97
--------·-------
K. ÃAS JAKOBSEN
LUIZ F. T. GARCIA
+ + + PROGRAMA APffEStNTADO
4 5 6 a ( cm)
FIG. 4 O
QUADRO COMPARATIVO
Programa "Frame Analysis" 1
Luiz Fernando T. 5
Garcia
Programa Apresentado

98
instabilidade do equilíbrio e rotura localizada na seçao mais so
licitada.
4.4 EXEMPLO 4
Para exemplo final, apresentamos o estudo de redis
tribuição de esforços, realizado com a viga continua represent~
da na Figura 41.
li.E...ÇAO PE CONCRETO ·oi ; cm T;-3F. · 00 cm ---+- 300 cm lf. F-
+1scm+ l' • fcd 200 KGF/crri2
f yd 5000 KGF/cm2
b AÇO TIPO B
a
-'ic---- 6 O O cm ------'!,.----- 600cm
FIG. 41
Mantendo-se estes comprimentos de vao e posicioname!
to de cargas, três vigas de mesmos materiais e mesma seção de
concreto, porêm armadas diferentemente, foram analisadas.

99
Partindo do esquema da Figura 41 e adotando-se F=6t,
obteve-se-o diagrama de momentos fletores elâstico, apresentado
na Figura 42.
1 Mb= 675 Cm,:t
Ma = ~f62,5 cm,:t
FIG. 4 2
•
Com base no referido diagrama, foram dimensionadas
as seçoes a e b da primeira viga (V-I). Posteriormente, adotou
-se de~ocar a linha de fechamento no ponto b de 15% e, assim, con
forme Figura 43, dimensionar a segunda viga (V-II).
675 X 0 1 8!5 = !573 1 8 Clllat
Ma= 562,'5 + 0, 15 • 67 5 "'613,1 cmxt 2
FIO. 45

100
Com a redução de 25% e procedimento anãlogo, dimen
sionou-se a terceira viga (V-III), segundo a Figura 44.
V - llI
~ IMbs 675 • 0,7!5 =!506,3 cmxt
Mo= 1562,5 -t-. o,_25_a_67!5 = 646 1 9 cmxt 2
,,.1 e. 44
O cãlculo das armaduras necessãrias para as três vi
gas, foi efetuado com recobrimento de 3cm ~·materiais de acordo
com a Figura 41 .
Apresentamos o quadro abaixo, com os valores das di
versas ãreas de aço obtidos.
V-I V-II V-III
seçao a seçao b seçao a seçao b seçao a seçao b
3,06cm 2 3,77cm 2 3,38cm 2 3,14cm 2 3,59cm 2 2,73cm 2
No que se refere ã distribuição do aço ao longo da
viga, o mesmo esquema da Figura 45, foi utilizado.

lo l
Asb ., 3 9 O cm 100 º"l,_ I'
a b j~ j >
1
1
1 Asa
Fl,G. 4 5
O estudo que apresentamos, tem em vista três tipos
de anãlises:
l) Viag4amaa ea4ga (F), momento 6leto4.
Na Figura 46 encontra-se desenhado o referido diagr!
ma para a viga V-I. Em linha cheia, aparecem os valores de MiÍ/ a
e M~ calculados de acordo com a teoria elãstica, permitindo a
comparação com os resultados obtidos pelo programa,
dos na figura em tracejado.
represent!
t interessante observar que o valor encontrado para
F mãximo e da ordem de 5% menor que o obtido pela teoria elãsti
ca, isto se deve ao fato de ser a seçao b mais fortemente armada
que a seçao a, acarretando um acrêscimo no momento fletor em sua
posição, em relação ao elãstico. ·

•r
too
6ÔO
500
400
300
200
100
o
102
M C cm , t )
Mb OE DIMENSIONAMENTO
//' /
_.,,Mc,a,___.o'-'•~--'º'--'''-"M"E'-'N"S"l-"O'-"N'-'A'-'M'-'E"N"-T!'O\L_ __ ~------.L /
• 1
Mb -
/. /,
/ /.
PAOG.
,'
/ /
/ •
2
/'
/ /
/ • /
/ /
/
/ •
/
3
• /
• /
/
/ /
• /
/
/
/
• /
/
/ /
,,'/
/·• ~---'M_a~~~·~R~O,_Gcc·~-
/
V - :r:
• ,s
FIG. 4 6
7 F ( t)

103
Diagramas do mesmo tipo sao apresentadós nas Figuras
47 e 48, correspondentes ãs ,ff~~s~ VII e V-III, respectivamente. --( 1 ) .:1 ,
---~
.L •. o l.:f
9 • •
:r:c - /1
1
~------~ /
/ /.
'EIOHd -o W
// /
/
h' /
• / /
/----------·ooaa-q1111
01.·N3NYN01SN3'410 30 qw
O.:LN3N\'N01SN3WIO 30 O~
001
ooa
oot
oov
ºº'
ºº' ( j X WO ) 11\1

M ( cm , t )
700
600
000
400
300
200
100 /
104
M Q DE DIMENSIONAMENTO
M b DE "DIMENSIONAMENTO
, ,;,o
_.t-_f_!lJ:b~~'!..Q_~--------:74~// -PROG. //
~ ~
<"/ '/
/ ,• ;,o~/
/ . / / . /
;, / '.í' ..,•
~/ / y /
y ,• M a - PR ô G.
y/
"'/ "'/
y/ r/ ,.
2 . 3
L-
4 5
F l G. 4 8
-----~- ...
• 7 F ( 1)
Como pode ser observado, o comportamento nao linear
das solicitações torna-se mais pronunciado ã medida que .o ·diagr~,
-~a de ~omentos fletoiés de dimensionamento se afaita do diagrama
elãstico.

105
2) V.lagll.ama c.all.ga ólec.ha:
Apresentamos a seguir, o diagrama carga deslocamen
tos no meio do vão (ponto de aplicação ~dJ, carga) para as tris
vigas:
Como pode ser visualizado na Figura 49, os grâficos
de V-I, V-II e V-III, praticamente se superpoem, fato este que
nos leva a crer que as modificações feitas pouco influem na rig!
dez áa estrutura.
Ressalte-se que os valores de F mãximo obtidos para
V-II e V-III são da ordem de 10% e 17%, respectivamente, menores
que o previsto (6t), no dimensionamento.
3) Fa:toll. de d.l~ :tll..lbc.úç.iio de momen:to~:
Para a comparaçao entre a distribuição de momentos
fletores nas s,eções a e b das tris vigas, foi def,il'nido o coefici "
ente C:
e =
M, ', .Íi_)
M a

l 06
F ( t )
•
•
4
•
+--+--+--+ V - IC
(!)-- -0- -0- -0 V - Jit
0,5 , .. 2 2,5 O (cm)
FIG. 4 9
Por intermêdio da Figura 50, ê permitido ob-servar
nas três vigas, o comportamento de Cem relação ã carga F apli
cada.

107
c=Mb/Mo
1,4
1,3
l',2 'DIMENSIONAMENTO ( V_ J: }
,., v_ m
,,o
_ ÓIMENSIONAMENTO ( V_I! )
0,9
0,8 DIMENSIONAMENTO ( V_l!I)
0,7
2 3 4 5 6 7 F(t)
FIG, 5 O

108
t interessante verificar que a partir de um certo v~
lorde F, a redistribuição de momentos começa a se fazer notar.
Ou seja, ã medida que as solicitações começam a fazer com que as
deformações nos materiais constituintes da seção mais solicitada
se aproximem das deformações limites, mais o coeficienteic se a V
proxima do valor de dimensionamento. Sendo que, nos três casos
as deformações limites são ultrapassadas antes que os valores de
C previstos no dimensionamento sejam atingidos.
COMENTÃRIOS
t importante observar, que o fenômeno da redistribui
çao de esforços em estruturas de concreto armado ê ainda um vas
to campo para pesquisa, tal seria verificado se analisássemos o~
tras vigas continuas com diferentes seções de concreto,
mentos de vão, tipos de aço, etc.
comprl
Consequentemente, muito pouco pode-se concluir em ca
ráter geral do exemplo apresentado.
Entretanto, podemos alertar que ao dimensionarmos vi
gas continuas pelo diagrama elástico, estamos (5% no exemplo a
presentado) ligeiramente contra a segurança.

109
CAPITULO V
CONCLUSÕES E SUGESTÕES
De acordo com os exemplos apresentados e com outros
testes efetuados, ê permitido concluir que o programa desenvolvi
do estã em condições de efetuar, com resultados satisfatórios,~
nâlises do comportamento de pórticos planos de concreto armado.
Devido ã utilização da matriz de rigidez transcende~
te, foi verificado que a convergência de resultados em relação ã
discretização da estrutura, ê melhor, nos casos analisados, do
que a obtida com programas que adotam a matriz de rigidez desen
volvida em 2.1.2.
Em relação ã nao linearidade física, podemos ressal
tara ef~ciência obtida ao trabalharmos com equilíbrio de esfor
ços (equilíbrio em cada seção), ao invês de compatibilidade de

110
deformações, necessitando em menor numero de iterações para ob
ter convergência de rigidez.
A titulo informativo, apresentaremos uma breve des
crição de dois processos diferentes para correção da rigidez, te~
tados no programa apresentado:
O processo consiste em ao final de cada anãlise li
near, com base nos esforços obtidos em cada membro, definir os
valores de e e cv em cada seção, a partir das seguintes expre~ g -soes:
onde:
E = g
CV =
N si
EA. i
M • S1
EI i
N . e M . si si
esforço normal e momento fletor em relação
ao C.G. da seção de concreto, resultantes da
ação da estrutura na referida seçao, na eta
pa de cálculo i.

111
EA. e E I . 1 1
rigidez secante ã deformação axial e rigidez
secante ã flexão do membro em que a seção estã
localizada, utilizadas. na etapa de cálculo i.
De posse
forço normal Nr(cv,
e cv, podemos encontrar o valor does
o valor do momento fletor Mr(cv, eg)'
resultantes dos materiais constituintes, para então definir os
novos valores de EA e EI:
EA = i+1
EI = i+l
€ g
CV
Este processo e apresentado por K. AAS-Jakobsen 1 1 2
• sendo que, em alguns casos testados, a convergencia não foi obti
da.
c.WLvatu.JLa:
1, 2 ,3 O processo, também apresentado por K.AAS-Jakobsen ,
e introduzido com o intuito de garantir convergencia •.

11 2
O processo caracteriza-se em obter E iterativamente . . g
visando o equilíbrio de esforço normal na seção, com a curvatura
mantida constante e definida por:
CV =
M si
EI i
Procedendo desta maneira, obtemos o valor de N (cv,E) r g
e M (cv,E) e encontramos os novos valores de EA e EI: r g
EA i+1
EI Í+l
=
=
N (cv, E ) r g
E g
M(cv,E) r g
CV
N s
= E
g
Devemos observar que este ê o processo empregado no 3 2 t 3
programa "Frame Analysis" Entretanto, Jakobsen nao ado
ta como parâmetro não 1 inear a rigidez ã deformação axial E A,
trabalhando sempre com seu valor mantido constante.
A estrutura apresentada no exemplo I, foi analisada~ P!
los três proéessos, permitindo uma comparação em termos de efici

11 3
ência computacional, para um carregamento constante, apresentado
na Figura 51.
i 128 1
FIG. 51
Para a anãlise em questão, a estrutura foi discreti
zada em 5 elementos de comprimentos iguais, com erro admissivel
na convergência (tol) igual a 0,001.
Com base nos resultados obtidos no computador Bur-
roughs-6700, do Niic) eo de Computação Eletrônica da UFRJ, foi cons
truido o quadro comparativo que se segue.
Devemos salientar, que os valores dos esforços e des

114
locamentos encontrados pelos três métodos, sao iguais, dentro da
precisão adotada (tol = 0,001 ).
NQ de Custo Iterações (tempo de processador + tempo
de E/S + integral de memõria)
Método a.
(compatibilidade 24 Cr$ 20,40 de deformações)
Método b ~,~-.....
(eqlii l ibri º· de l l Cr$ 17,87 esf. normal e compa ti bilida de de curvatura)
Método p.1topo.1>to
(equ i1 ib·rJ.o. de • _·_/·esforços)
6 Cr$ 17,33
No que diz respeito a aprimoramentos futuros ao tra
balho, podemos apresentar algumas sugestões:

115
a) Compo~tamento ~eolÕg{co do conc~eto ~ob ca~ga de
longa du~aç.ã.o.
Os efeitos de fluência no concreto, podem ser consi
derados, mediante a suposição de fluência linear com as deforma
çoes.
Apõs a convergência para o carregamento instantâneo,
devemos discretizar o tempo em intervalos ât e supor que as ten
sões reinantes em cada fibra de concreto de .cada seção, sao man
tidas constantes ao longo de cada intervalo de tempo.
Por intermêdio da deformação instantânea E encontra o
da em cada fibra, podemos obter o acréscimo de deformação no co~
ereto, devido â fluência (E ), através da seguinte expressão: CC
onde:
E = E ~(T, t - T) CC O
T
t
representa o coeficiente de flu~ncia
idade do concreto no instante da aplicação
do carregamento.
instante de tempo em que se estã analisando.

116
De posse de Ecc em cada fibra, podemos obter numeri
camente os valores de cv e Eg' capazes de fornecer, ao final do
intervalo ât, equilíbrio na seçao.
Devido ã deformação Ecc' devemos ao calcular as ten
soes resultantes de cada fibra de concreto, utilizar apenas a de
formação efetiva ("instantãnea") Ec' definida por:
E = E - E C CC
onde:
E deformação total atuante na fibra de concreto.
Desta maneira, ao final de cada intervalo ât, deve
mos proceder iterativamente atê que novamente a convergência de
EA e EI seja encontrada.
Ressalte-se que os valores de E devem ser calcula CC
dos e acumulados ao final de cada intervalo de tempo.
'E importante lembrar que por se tratar de análise
nao linear, os teoremas de correspondencia não sao mais válidos.
Alêm do mais, com a variação dos deslocamentos ao longo do tempo,
embora o carregamento seja mantido constante, os esforços solici

117
tantes irão variar segundo uma lei desconhecida, decorrente[§) das
efeitos de 2a. ordem.
Evidentemente, a sugestão apresentada, carece de es
tudos· mais aprofundados no assunto, devendo o processo apresent~
do ser levado em conta apenas como uma idéia, passível de ser me
lhorada ou mesmo corrigida.
b ) V .i.m e 11.ó .i. o 11am e 11 t:o •
. O programa desenvolvido, poderia ser adaptado para
efetuar dimensionamentos, mediante um processo de tentativas.
c) Co11e~et:o p~ot:end.i.do.
O método exposto no trabalho apresentado, pode ri a
ser também estendido a anãlises em estruturas de concreto prote~
dido, através das considerações dos diagramas tensão deformação
dos aços C.P. e do pré-alongamento fornecido como dado ao progr~
ma.
Um certo cuidado deve ser tomado ao introduzirmos os
efeitos do esforço normal de protensão, pois os mesmos nao sao
de mesma natureza que os carregamentos externos, ou seja, não re ~

118
presentam um campo conservativo de carregamento.
A titulo de informação, podemos acrescentar que re
sultados satisfatõrios foram obtidos em comparação com análise
experimental, nas vigas de concreto protendido bi-apoiadas, en
saiadas na tese de M.Sc. do Engenheiro Ladislau Netto Júnior.
Na ariilfie,,devido ã natureza da estrutura, os efei ~-- - . " -- -·- .-........_.
tos de 2a. ordem decorrentes da interação axial flexão, nao fo
ram levados em conta. Consequentemente, apenas a nao linearida
de fisica foi considerada.

1.
2.
3.
4.
BIBLIOGRAFIA
COMITt Europêen du Bêton Manuel de Ca 1 cul "Fl ambement
-Instabilitê", S.I., Juillet 1973 (Bulletin d'infor
ma ti o n , N. 9 3) .
AAS-JAKOBSEN, K. ~.:,-"", ~ .............. ~ ....
A Design Method for~il.~nd}i.r_y_Reinfor-
ced Concrete Frames, Institut für Baustatik, E T H
Zürich, November 1973.
AAS-JAKOBSEN, K.; .-,.und
lastischer Rahme~
GRENACHER, M. Berechnung Une-(~ ·•
Nach der Theorie,~. Ordnung,
Bericht Nr. 45, Institut für Baustati,k•, ETH Zürich, .._, '-,,.'!,_
Januarf 1973. ""'"", .. ,:
BLAAUWENDRAAD, J. Realistic Analysis of Reinforced
Concrete Framed Structures.
1 972.
HERON, V. 18, N.4,

5.
6.
7.
8.
9.
1 O.
120
GARCIA, L.F.T. Anãlise Não-Linear de PÕrticos Planos /\ de Concreto Armado. ,• Rio de Janeiro, COPPE-UFRJ, Te
se de M.Sc., Dezembro de 1974.
YAMAGATA, N. Colunas de Concreto Armado Solicitadas
por Cargas Axiais Excêntricas. Rio de Janeiro,
COPPE-UFRJ, Tese de M.Sc., Fevereiro de 1973.
AZEREDO, M.C. Cãlculo Não-Linear de Estruturas Reticu
ladas de Betão Armado. Universidade do Porto, Fa
culdade de Engenharia, Setembro 1973 (Boletim do Ga
binete de Estruturas, N. 17)
FARIA, A. Non-Linear Behaviour of Frarnes and Slabs.
Lisbon, LNEC, April 1973. (CEB-International Course
on Structural Concrete, C6-2)
GURFINKEL, G. and ROBINSON, A. Deterrni na ti on of
Strain Distribution and Curvature in a Reinforced
Concrete Section Subjected to Bending Mornent and
Longitudinal Load. ACI Journal, July 1967.
HARTZ, B.J.
Problerns.
Matrix Formulation of Structural Stability
Journal of the Structural Division, ASCE,
V. 91, ST 6, Decernber 1965.

11.
l 2.
l 3.
l 4.
15.
16.
17.
l 21
COATES, R.C.; COUTIE, M.G.; KONG, F.K. S truc tura l
Analysis. Great Britain, Nelson Jc 1972J.
GERE, J.M.; WEAVER Jr., IL Anãlisis de Estructuras
Reticulares. Mixiio - Espa~a. Compa~ia Editorial ,,
Continental Jl967J.
CHU, K.H. and RAMPETSREITER, R.H. Large Deflection
Buckling of Space Frames. Journal of the Structu-
ral Division, ASCE, V. 98, ST 12, December 1972.
MANTILLA, E.P. Um Método Iterativo Para Análise de Não
-Linearidade Geométrica em Estruturas Reticulares.
Rio de Janeiro, COPPE-UFRJ, Tese de M.Sc., 1974.
TIMOSHENKO, S.P.; GERE, J.M. Mechanics of Materials.
New York, Van Nostrand IC 19721.
MONTOYA, P.J.; MESEGUER, A.G.; CABRt, F.M. HormigÕn
Armado. 7 ed. Barcelona, Editorial Gustavo Gili
11 9 7 3 I , 2. V.
CARNEIRO, F.L.L.B. Efeitos Estruturais do Comportame~
to ReolÕgico do Concreto.
-UFRJ, 1975.
Rio de Janeiro, COPPE-

18.
122
COMITÊ Europeen du Beton Recommandations Internationa-
les pour le Calcul et L'Execution des Ouvrages en
Beton, Principes et Recommandations. (Seconde Êdi
tion, Redaction, Mai 1972).
19. TIMOSHENKO, S.P.; GERE, J.M. Theory of Elastic Stabi-
lity. New York, McGraw-Hill Jc l961J.

123
APÊNDICE A
MANUAL DE ENTRADA DE DADOS DO PROGRAMA
A.1 DADOS GERAIS SOBRE A ESTRUTURA
Um c.a.Jt.-tiio :
Variãveis:
NQ de membros, nQ de nos, nQ de restrições de apoio,
nQ de apoios, nQ de membros com liberações.
Formato:
5I5
A.2 T!TULOS RELATIVOS Ã ESTRUTURA
TIL ê1, c.a.Jt.,tÕ e!> :
Escrever os títulos da coluna 16 atê a 72 inclusive.

124
A.3 COORDENADAS DOS NÕS
NQ de cantÕeJ ~gual ao nQ de noJ:
Variáveis:
NQ do nõ, coordenada X, coordenada Y.
Formato:
I5,5X, 2Fl0'.0
A.4 INCIDtNCIAS E PROPRIEDADES DOS MEMBROS
NQ de gnupoJ de cantÕeJ ~gual ao nQ de memb4o6:
A. 4. l Características do membro
Um can,tão:
Variáveis:
NQ do membro, nõ J, no k, nQ de coorden~das da seçao
de concreto, nQ de camadas de aço.
Formato:
5I5
A.4.2 Coordenadas da seçao de concreto
NQ de cantÕeJ ~gual ao nQ de coondenadaJ da S.C.

125
Variáveis:
NQ do ponto, largura util de concreto ao nível do
ponto, ordenada Y do ponto.
Formato:
I5, 5X, 2Fl0.0
A.4.3 Definição do nQ de faixas por zona
Nq de ca4tÕe6 ~gaal ao nÇ ,de coo4denada6 S.C. me
no6 am:
Variáveis:
NQ da zona, nQ de faixas.
Formato:
2 I 5.
A.4.4 Definição das camadas de aço
NÇ de ca4tÕe6 ~gaal ao nÇ de camada6 de aço.
Variáveis:
NQ da camada~ área de aço, ordenada Y da camada.
Forma to:
I5, SX, 2FlD.O

A.5
Obs; :
A.6
l 26
LIBERAÇÕES NOS MEMBROS
NÇ de ea~tõe-0 igual ao nÇ de memb~o-0 eom libe~a
ç.o e-0 :
Variãveis:
NQ do membro, Lib. 1, Lib. 2, ... , Lib. 6.
Convenção:
Lib.n=l
Lib.n=O
Formato:
7 I 5 •
existe liberação
não existe liberação.
Caso nao existam membros com liberações, este item deve
ser eJiminado.
RESTRIÇÕES DE APOIO
Nq de ca~tõe-0 igual ao nÇ de apoio-0:
Variãveis:
NQ do nõ, r.l, r.2, r.3
Convenção:
r. n = l
r.n = O
existe restrição
não existe restrição.

Formato:
4I5.
127
A.7 CARACTERTSTICAS DOS MATERIAIS
A.8
Um c.a.ll.tão:
Variãveis:
fck' fyk' módulo de elasticidade do aço, tip.
Convenção:
ti,p = l aço tipo B
tip = O aço tipo A
Formato:
3Fl0.0, I5.
COEFICIENTES DE MINORAÇAO DE RESISTENCIA
Um c.a.ll.tão:
Variãveis:
Coeficiente de minoração do concreto, coeficienteG.
de minoração do aço.
Formato:
2Fl0.0

128
A.9 ANÃLISES DE CARREGAMENTO
Um c.aJt.tiio:
Variãveis:
NQ de anãlises a serem efetuadas, tol.
Formato:
IS, FlO.O
A. l O DEFINIÇÃO DAS ANÃLISES
A.10.1 Titulo da anãlise
Um c.aJt.tiio:
Escrever o titulo da coluna 16 atê a 72 inclusive.
A.10.2 Carregamentos nodais
Um c.aJt.tiio:
Variãveis:
NQ de nõs carregados, nQ de nos com carga variãvel,
d to 1 .

Ob s. :
Formato:
215, FlO.O
1 29
Caso a anãlise nao seja pesquisa da capacidade de carga,
deixar igual a zero o valor das duas ultimas variãveis.
A.10.3 Posicionamento do carregamento
Variãveis:
NQ do nõ, força X, força Y, momento Z.
Formato:
15, 5X, 3Fl0.0
A.10.4 Posicionamento das cargas variãveis
Variãveis:
NQ do nõ, ldv.l, ldv.2, ldv.3
Convenção:
ldv.n = l
ldv.n = O
indica que e variãvel
indica que e constante

o b s. :
Formato:
4I5
130
Caso a anãlise nao seja pesquisa da capacidade de carga,
,eliminar este item.
A. 11 FLAG
O programa nao restringe o nQ de estruturás a serem
estudadas. Para tanto, basta que voltemos ao item A. l, para d!
finir uma nova estrutura. Consequentemente, objetivando indi
car que a ultima estrutura jã foi analisada, devemos colocar um
cartão em branco, apõs o item A.10.4 da mesma.
Apresentamos a seguir, a entrada de dados para a es
trutura do exemplo l, aonde duas anãlises são solicitadas:
lQ) Anãlise para o carregamento constante, apresentado
na Figura 51.
2Q) Pesquisa da capacidade de carga, cuja curva carga
flechai apresentada ní Figura 37.

235. 1~
1 31
5 é 3 1 EXEMPLO P/ o !',ANUAL DE ENTRADA DE DADOS COLUNA ENGASTADA NA E XT,RE MI DAOE UNIDADES - CM X KGF
1 o. o. 2 o. 80. 3 o .• 160. 4 o. 240. 5 o. 320. é o. 400. l 1 2 2 2 l 40. o. 2 40. 4C. 1 1.5 l 15.1 4. 2 15.1 36. 2 2 3 2 2 1 40. o. 2 40. 40. l 15 1 15.l 4. 2 15.1 3é. 3 3 4 2 2 1 40. o. 2 40. 40. l 15 1 15.l 4. 2 15~1 36. 4 ~ " 2 2 -l 40. o. 2 40. 40. l 1: 1 15. l 4. 2 15.l 36. 5 5 6 2 2 1 40. o. 2 40. 40. l i"5 l 15.1 4. 2 1:.1 36. l 1 l l
4200. 2100000. 1.
2 0:.001 COMPARACAO DE CRITERIOS DE CORRECAO DE RIGIDEZ
1 6 6000. -128000.
CARGA MAXIMA COM 5 ELE~ENTOS l 1 0.01 é 3000. -128000. 6 1

132
AP[NDICE B
LISTAGEM DO PROGRAMA

F-ILE FILE FIL E FILE
l=CARTOES, UNIT=READER 2=-IMPRESS,l:NIT,;PRINTER ll=BIZE1,UN!T=DISKPACK,AREA=50,RECO~D=124 12=BIZE2,UNIT=DISKPACK,AREA=50,RECORD=42
e. ~ .. e ••••
TESE DE M. se - JOSE CLAUDIO DE FARIA TELLES -COPPE/UFRJ/1975 PROGRAMA P/ ANALISE NAO LINEAR DE PORTICOS PLANOS DE CONC. ARMADO
REAL IZN(9),IZ,MOMES(9),L(50) ,MOMEl,LAMBD INTEGER Z,W,UBWiRL(?Sl D IM EN S IO N _ X ( 2 5 l , Y ( 2 5) , J J ( 5 O) , J K ( 5 O ) ,C X 1 50 > , C Y ( 50 ) , X C ( 1 O l, Y C t 10 l , NZ
* I ( 9 l , Y S ( l O ) ,A S ( 1 O l , X M ( 5 O) , Y M t 50 ) , AR EA ( 50 l , AC ( 75 l , AR ( 7 5 l , D ( 75 l , E 1( 5 * O l , EA ( 5 O ) , P ( 5 O l , S ( 7 5 , 21 l , S M ( 6, 6 1 , SM R ( 6, 6 1 , S MO ( 6 , 6 l , JA ( 6 ) , R ( 9 l , AML ( *50,.6) ,EAA(50) ,E!A(50l,I0\Í(75) ,ACCl3l,PA15.01,LIBl50,61
Z=l W=2
e; ••• LEITURA DE DADOS GERAIS SOBRE A ESTRUTURA 101 READIZ,l)M,NJ,NR,NRJ,NML
1 FORMAT(5!5) IF(M)lCC0,1000,2
C.~ •• IMPRESSAO DE TllULOS GERAIS --··2-·wRITE-(W',3) ··----
3 FORMAT(1Hl,t///J,15X,'COPPE/UFRJ-TESE DE M. SC-JOSE CLAUOIO DE FAR *IA TELLES - l975- 1 ,/////,15X, 1 PROGRAMA P/ ANALISE NAO LINEAR DE ES *-TRUTURAS TIPO PORTICO PLANO DE CONCRETO ARMADO•,/)
C.~ •• IMPRESSAO DE TITULOS RELATIVOS A ESTRUTURA DO 4 !=1,3 READI Z,-5)
5 FORMA T ( 1
* '1 WRITE(W·,6)
6 FORMA T (/ /) 4 WRITEIW-,5)
ND=3*NJ N=NO-NR WRITE(W~7)M,NJ,NR,NRJ,NML,N
7 FORMATU////,30X, 1 DADOS GERAIS SOBRE A ESTRUTURA',///,15X,'NUMERO
w w

*DE MEMBROS =•;I5,//,15X.'NUMERO DE NOS =',l5 1 //,15X, 1 NUMERO DE LIG *ACDES DE APOIO =',l5 1 //,15X,'NU~ERO DE APOIOS = 1 ,I5,//,15X, 1 NUMERO • DE MEMBROS COM LIBERACOES =•,I5,//,15X,'GRAU DE INDETERMINACAO CI *NEMATICA =',I5,/////,30X, 1 COORDENADAS DOS NOS',///,14X,'N0',15X,'X * ' •· 1 5X ' 'y ' ' / / l
00 8 I=l,NJ 8 READ(Z,9)J,X(Jl,Y(J) 9 FORMAT(I5,5X,,2Fl0.0l
WR lT E ( W, 10 l ( J ·, X (. J ) , Y ( J ) , J = l , N J l 10 FORMAT(l1X,I5,8X,Fl-0.2,6X,Fl0.2,/l
C ~,,, INCIDENC IAS E PROPRI.EDADES DOS MEMBROS COND=O, WRITEtW,11)
11 FORMA1{////,30X,'!NCIDENCIAS E PROP~IEDADES DOS MEMBROS') DO 12 IKP=l,M READ{Z,13l!M,.JJ{IM) ,JK{IM) ,NSC,NFS
13 FORMAT( 515) IF(JK{IM)-JJ(IMt)14,14,15
14 WRJTE<W,S5)JM,JK(JMl,JJ(JI') 95 FORMAT{///,15X,'PARA QUE O PROGRAMA POSSA SER PROCESSAD0,',//,15X
*,.'D USUARIO DEVERA INVERTER O SENTIDO DO MEMBR0•,!5,//,15X,'FAZEND »o-o PASSAR DO NO (',13,') AO NO (',13,')')
CONO=CONO+l, -----·--·- 15 JJJ-=-J;J{ IM)
JKI=JK( IM) XCL=X(JK!l-X(JJI) YCL=Y(JKil-Y(JJll L(!Ml=SQRT(XCL**2+YCL**2l CX( IM)=XCL/L<IM) CY(JM)=YCL/L(IM)
ci ••• PROPRIEDADES DA SECAO TRANSVERSAL R EA D ( Z , 16) ( I e, XC ( l C l , YC ( I C ) , I = 1 , N se l
16 FORMAT(15,5X,2Fl0,0) NSCZ=NSC-1 R EA D ( Z, 1 7 l ( I e-, N Z I ( I C l , l = 1 , N se Z)
17 FORMAT(215) C.~ •• CALCULO DA COTA DO CG,
DO 18 I=l,NSC Z X M ( I ) = ( X C ( I ) + XC ( l + 1 ) ) / 2,

18 Y M ( I l = ( ( YC ( I -1:l l -YC ( I l l * ( XC ( I l +2 • * XC 11 + 1 l l l / ( 3. •!'( X C I I + 1 l +X C ( I l l l +Y C * 1 I l
AREC=O. MOMEI=O. I Z= C. 00 19 I=l,NSCZ AREAi I )=( YC ( I+l 1:-vc < I l l*XM ( 1 l MOMES(ll=AREA(Il•YM(I) I ZN I I l =; MO ME S ( I l * YM I I l + 1 1 XC ( 1 + ll **2 +4. •x C ( I + ll *X C ( I l +X C I I l ** 2 l * 1 Y C (
:t I + 1 l- YC ( I l l **'3 l / ( 3 6. * 1 XC II+ ll + X C I I l l. l AREC=AREC+AREA!Il MOMEI=MOt'EI+MOMES!Il
19 IZ=IZ+IZN!Il ' YCG=MOME I/AREC IZ=iZ-AREC*YCG:!<*2
e.; •• GERACAO AUTOM4TlCA DAS FÁIXAS MF =C NF=O 00 25 I=l,NSCZ MF=MF+N;>;I!Il YZ=YC(I+ll-YC!Il. OF=YZ/FLOAT(NZI ( I l l N I=NF +2
- N F =·N·F+ N Z I l I ) - - - - - - . YMINI-1 l=YC( I l+DF/2. TF(YZlZZ,21,22
22 XM( NI-1 )=(XC I I+ll-XC II l l* (YM!NI-11-YC ( I l l/YZ+XC( I l 21 AREA(NI-ll=Xt'(NI~ll*DF
IFINF-Nll25,24,24 24 DO 20 K=NI,NF
YM(K)=Yt'(K-ll+DF IF( YZ.123,20,23
- 23 XM(Kl=(XCII+lt-XC!lll*IYM(Kl-YC(Ill/YZ+XC(I) 20 AREAIKl=XMIKl*DF 25 CONTINUE
C; ••• IMPRE SSl\/0 DOS DADOS RELATI VOS A SEC AO DE CONCRETO E DO MEMBRO W R I TE I W, 2 6 l 1 M , J'J ( IM l , J K ( I M l , I Z, ARE C, L I I M l , C X ( IM l , CV (1 M l , N se, NF S, Y C
*G 26 FORMAT(///,15X,'MEMBRO NUt'ER0',I5,////,5X,'JJ',9X,'JK',llX,'1Z',11
w 01

*X,'AX',12X,'L',10X,'CX',9X,'CY',5X,'NUM.COORD.sc.•,4x,•NuM.CAMAD.A *C • 1 ', 7 X , º' YCG ' , 11 , 2 X , I 5 , 6 X, I 5 , 2 X , Fl 5. 4, 2 X, F 1 O. 3, 3X, F 1 O. 3, 6X , F 5, 2, 6X, *F5.2,5XiI5,12X,I5,8X,Fl0,3,lll,15X,'LARGURAS E ORDENADAS DA SECAO *DE CONCRETO',-ll,.14X,'PT0',14X,'B',15X,'Y',/)
WRITE(W,27)(1,XC(ll,YC(Il,1=1,NSCl 27 FORMAT(11X,15,10X,Fl0,4,6X,Fl0,4,ll
WRITE(W,Ze) 28 FORMATCI ,15X, 1 NUM8RO DE FAIXAS POR ZONA',/l,13X, 1 ZONA 1 ,11X,'FAIX
:l<AS',/l WRITE CW',ZS)(I ,NZI (I );,I=l,NSCZl
29 FORMAT(11X,15,11X,I5,/l C.~ •• LEITURA E IMPRESSAO DAS CAMADAS DE ACO (CAI
READ( Z, 16) ( IC,AS( IC l ,YS(lC) ,I=l ,NFSl WRITECW,30)
30 FORMATCI ,15X,'AREA E ORDENADAS DAS CAMADAS DE ACO (CAl 1 ,//,15X,' *N',13X,JAREA.',13X,'YS',/l
W R· I TE ( W , 2 7 l ( I , AS ( I l , Y S ( I l , I = 1 , NF S l c;;,. COORDENADAS EM RELACAO AD CG
YBl=YC ( 1 l-YCG YBZ=YC(NSCl-YCG DO 300 KH=l,MF
300 YM(KHl=YM(KHl-YCG DO 301 KH=l,.NFS
--3or YSTKH)=YS(KH)-YCG e.;., ARMAZENAMENTO DOS DADOS EM DISCO
1 l=-IM WRITE(ll'lllMF,NFS,YM,AREA,AS,YS,YBl,YB2
12 CONTINUE IFCCONDllCOC,31,1000
31 IF(NML )426,426,427 C;,,. LIBERACOES NOS MEMBROS
427 WRITE(W,4281 .428 FORMAT(l/ll,30X,'LIBERACOES NOS MEMBROS',lll,36X,'NO J',47X,'N0 K1
*, 11 , 3X ,., MEMBRO ' , 14 X, ' X' , 14 X , ' Y ' , 13 X , ' MZ ' , 20 X, 'X' , 14 X, ' Y 1 , l 3X, 'MZ' , *I /l
00 429 LP=l,NML R E AO ( Z, 4 3 C l 1 , ( L !B ( I , L B l , L 8 = l , 6 l
430 FORMAT(7I5l 429 WRITE(W,43llI,tLIB(I,LBl,LB=l,6l
w a,

431 FORMATl2X,15,12X,15,10X•l5,lOX,15,16X,I5,10X,I5,10X,I5,/l C,J,, RESTRICOES DE APOIO
426 DO 32 I=l,ND 32 RL!Il=O
WRITE(W,33) 33 FORMAT(////,3DX. 1 LISTA DE RESTRICOES DE APOI0 1 ,///,14X, 1 N0 1 ,15X,'X
* ' , l 5 X:, 1 Y ' , 1 4 X , ' M Z ' , / / J DO 34 !=1,NRJ READIZ,35)K,RL(3*K-2l,RL(3*K-ll,RL(J*Kl
35 FORMAT(4I5l 34 WRITE(W;36)K~RL(3*K-2l,RL(3*K-11,RL(3*Kl 36 FORMAT(4Cl1X,I5L,/)
e •••• CARACTERISTICAS DOS MATERIAIS READCZ,37lFCCK,FYSK.EMS,TIP
37 FORMAT(3Fl0,0,I51 READ( Z,3EIGC ,G·s
38 FORMAT(2Fl0,0L WRITE(W,391FCCK,FYSK,EMS
3<; FORMAT(////,30X, •CARACTERISTICÀS DOS MATERIAIS',///, l5X,'CONCRETO *',22X,'FCCK ca 1 ,Fl5,2,//,15X,'ACO (CAl',22X,'FYSK =',Fl5,2,//,15X,' •MODULO DE ELASTICIDADE DO ACO CCAI =',Fl5,2)
IF(TIP)40,40,41 40 WRITE!W,42)
--42 FORMATU,15.X,.'ACO-·(CAI TIPO (Al'I GOTO 43
41 WRITEC~J,441 44 FORMATl/,15X,'ACO (CAI lIPC (Bl'l 43 WRITE(W,45)GC;GS. 45 FORMAT(/////~30X, 1COEFICIENTES DE SEGURANCA 1 ,///,15X, 1 GAMA C =',F5
*. 2, / / , 15 X, 'GAMA S =' , F 5, 2 ) C.a •• DEF1NICAO DOS PARAMETROS NECESSARIOS AOS DIAGRAMAS DOS MATERIAIS
FCCD=FCCK/GC FYSD=FYSK/GS ESY4=0,0l IF( TIP 146,4é,47
46 E SY=F YSD /EM S GOTO 48
47 FY07=0,7*FYS0 FY09=C;'l*FYSD
w ......

ESY1=FYC7/EMS ESY2=FYC9/EMS+C.C002633 ESY3=FYSD/EMS+O.OC2 FY10=1, 15*FYSD
120 ESP=FYlO/FYSD-0,7 EST=FY1-0/EMS~0,823*ESP**5 IFIABSIESY4-ESTJ-ESY4*1,E-3)48,48,121
121 DFY=l./EMS+(4~115*ESP**4l/FYSD FYlG=FYlO+(ESY4-EST)/DFY GD TO 120
48 EC02=-0,002 EC35=-0,0035
e;;,, ANALISES DE CARREGAMENTO READI Z, é2 )NLs.·, TDL
62 FDRMATtl5,FlOiOt WRITE(W,6l)NLS,TDL
él FORMAT(/////,30X,'NUMERO DE ANALISES =',I5,///,30X,'ERRO ADMISSIVE *L NA CONVERGENCIA = 1 ,Fl0,5)
DO 63 IL=l ,NLS IPP=O LAMBD=l. WRITE IW, é4 l IL
64 FORMAT(///,15X,'ANALISE NUMER0',15,///) RFADIZ,51 ·--·-- ---------WRITEtw,51 READ(Z,122lNLJ,IPES~DTOL
122 FORMAT(215,Fl0.0l !Ft IPES1200,200,20l
201 WR1TE(W,202)DTOL 202 FDRMAT(///,13X,'* PESQUISA DA CAPACIDADE DE CARGA* ERRO AOMISS1VE
*L NA CARGA MAXIMA =•,Fl0,51 OESS=0,25 I F IN =O
200 WRI1E(W,65lNLJ 65 FORMATt///,15X,'NUMERO DE NOS CARREGADOS =',15)
DO é6 I=l,ND AR(ll=O~ AC(ll=O,
66 IDVl!l=O
w ex,

WRITE(W,67) 67 FORMAT(///,14X,'N0',.15X,'){',15X,'Y',.l4X,'MZ',//)
DO 68 I =1,NLJ READIZ,tSlK,AC (3:!<K-21 ,AC (3*K~ll ,AC (3'*Kl
69 FORMAT(15,5X,3F10.0) 68 WRITEIW',70JK,AC(3*K-2J ,AC !3*K-1) ,AC(3*Kl 7 O FOR MA T ( 11 X, I 5 ', 7 X , F 12. 3 , 4 X, F 12. 3 ,4 X , F 12. 3, / l
UBW=O IF1IPESJ203,203.204
204 WRlTE(W,206llPES 206 FORMAT(///,15X,'NUMERO DE NOS COM CARGA VARIAVEL =',I5,///,l4X,'N0
* ' ,. 15 X , 1 X ' , l 5 X, 'Y 1 , l 4X, 1 MZ ' , / /) DO 205 IV=l,IPES READ(Z;35)K,IDV(3*K-2) ,IDV(3*K-ll ,IDV!3*Kl
2C5 WRITEIW',36)K,,IOVl3*K-2) ,IDVl3*K-U ,I0V(3*Kl 212 IPP~IPP+l '
IF( IPP-1)203,203,504 5C4 LAKBD=LA~BD+DESS
c:; .. INICIO DA ITERACAO 203 DO 49 INT=l,25
IAUT=O DO 71 J=l,ND IF(RL(J) )73,73,502
502 DCJ l=O. GOTO 71
73 IF(1DV(J))306,306,213 213 D(J)=AC(Jl*LAMBD
GOTO 71 306 D(Jl=AC(J)
71 CONTINUE 1178 DO ~6 K=l,ND
DO 56 J=l,21 5 6 51( K, J ) =O.
IRIGN=O C~ ••• INICIO DO GRANDE DO
DO 50 I=l,M C •••• CALCULO DE El E EA TANGENTES NA ORIGEM
IF( INT-1)51,51,52 51 !F( IPP-11221,221,52
w
"'

e! .. . 221
LEITURA NO DISCO I l= I REAO(llJll)MF,MFS,YM,AREA,AS,YS1YBl,YB2 EG=l.E-10 C V=O. CALL ESFOR(A,B ,FCCD,FYSO,ESY,Fi07,FV09,ESY1,ESY2,ESY3,ESY4,EC02,
*EC35,TIP,RUT,EG,CV,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY101 EAHl=B/EG CV=-EG/YB1 CALL ESFOR(A,.B ,FCCD,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4,EC02,
*EC35,TIP,RUT,EG,CV,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY10l E I ( I ) =A/CV P(Il=O.
52 CALL Rl~~B(l,L,EA,EI,SM,P,NML,LIB,IAUTI IF(EA(I))350,350,353 ·
35C 353
!RIGN=IR!GN+l DO 53 K=l,2 00 53 J=l,6 SMRIJ,3*K-2l=SM(J,3*K-2l*CX(l)-SM(J,3*K-ll*CY(ll SMR.(J~3*K-ll=SMIJ,3*K-21*CY(Il+SM(J,3*K-ll*CXIIJ
53 SMR(J ,.3*K l =SM(lJ, 3*K 1 DO 54 IV=l,3 IT=3-IV JAl1Vl=3*JJ(I1-1T
54 JA( IV+3)=3:l<JK(ll:-IT !F( !AUT) 1183,.1183,1184
e;.· . . 1183
e.• .. 1184
ARMAZENA~ENTO NO DISCO (SMR=SM*RT E NUMERACAO DE DESLOCAB1Ll0ADESI 12= I WRITE(l2'I2lSMR,JA GERACAO DE SMD (RT'*SMR) DO 65 K=l ,2 DO 55 J=l,6 SMD(3:l<K-2,Jl=CXII)*SMRl3*K-2,JI-CY(ll*SMRl3*K-l,J) SMDl3*K-1,Jl=CY(l)*SMR(3*K-2,Jl+CX(Il*SMR(3*K-1,JI
55 SMDl3*K,Jl~SMR(3*K,Jl C! ••• MONTAGEM DA MATRIZ OE RIGIDEZ DA ESTRUTURA , ARMAZENANDO A SEMI
BANDA SUPERIOR COMO MATRIZ RETANGULAR e . • .. DO 419 IC=l,6 JAI=JA( IC)

IF(RL(JAl)l 419,419,417 417 DO 418 K=l,é
SMD( IC,K l=O. 418 SMDIK,,IC)=O. 419 CONTINUE
DO 403 IC=l,6 JAI=JA(IC) DO 405 J=l,é JAJ=JA(Jl-JAI+l if(JAJ)405,405,404
404 IF(JAJ-UBW)425,425,406 406 UBW=JAJ 425 S(JAI ,JAJ) =S(JAI,JAJ)+SMD (IC,Jl 4C5 CON1INUE 403 CONTINUE
IF(UBW-21)50L50,57 57 WRITE(W,58) 58 FORMAT(/////~15X,'FOI ULTRAPASSADA A LARGURA MAXIMA DA BANDA DA MA
*TRIZ DE RIGIDEZ') GOTO 1000
50 CONTINUE C •••• CONOICDES DE CONTORNO
DO 59 I ~1,ND IF( RL <ITl59,59,'60
éO S(I;ll=l. 59 CONTINUE
IF( IAUTlll8.l,,1181,1182 1182 CALL GAUSS(ND~UBW,S~ARl
GOTO 1185 C\ ••• RESOLUCAO 00 SISTEMA OE EQUACOES
1181 CALL GAUSS(NO,UBW,s~o, 1185 IPELE=O
DO 311 IOET=l,NO I F (S ( IDE T , l ). ) l O 7 7, l O 77 , 311
1077 IPELE=IPELE+l 311 CONllNUE
IF(IAUT)1179,ll79,1180 1179 IF(IPELE-IRIGN)S00,800,1177 1177 JAUT=l

1180 801
1 e e 1 2801
8C3
233
234
800
e~ ...
GOTO 1178 IFl·IPEL8)800,800,801 IFl·IPES)2801,2801,1801 WRITE(W,216)JPP,LAMB0 WRITE(W,81) INT WRITE(W,803) FORMAT(///,15X,'lNSTABILIOADE DO EQUILIBRIO'l lF( IPP-1163,63,233 LAMBO=LAMBD-DESS OESS=DESS/2. IFIN=IF-IN+l DO 234 I V=l ,M P(IV)=PAl!V) EA( IV )=EAA( IV) E I ( I V.l =EIA ( IV) GD TO 212 CALCULO DAS ACOES NOS EXTREMOS DOS MEMBROS NMNC=O DO 74 I=l,M LEITURA NO OI SCO 12=1 READ(l2Jl2)SMR,JA DO 75 J=l,6 .AML( r, J l =O. DO 75 JC=l,6 JB=JA(JCl
75 AML11,J)=AML(I,J)+SMR(J,JC)*D(JB1 e •••• VERIFICACAO DA CONVERGENCIA
103 1103 21C3
104
102 74
CALL VERIF(AML,I,EA,EI,FCCD,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4 *,EC02,E035,TIP,RUT,NMNC,TOL,L,P,FYLO)
IF(RUT-1.) 1C21102,103 IF(1P8Sl2103,2103,l103 WRITElW,216lIPP,LAMBD WRITE'{ W, El) INT WRITElW,104)! FORMAT(///,15X,'ROTURA NO MEMBR0',151 IF( IPP-1)63,63,233 P l I l =AML l 1 , l) CONTINUE

I f ( IN T-1l49, 4 S, 5 5.5 555 IF(NMNC l 78,.78,556 556 IF(!NT-25)49,802,802 802 IF( IPES.l.2802,2802,1802
1ec2 WRI1E(W;216)IPP,LAMBD 2802 WRITE(W,111.llINT 1111 FORMAT(///,15X,'NAO FOI OBTIDA CONVERGENCIA EM',15,' ITERACOES',//
•.1sx,•coNSIDERA-SE QUE FOI ULTRAPASSADA A CAPACIDADE DE CARGA DA E *STRUTURA'l
IF(,JPP-1)63,63,233 49 CONTINUE 78 IF(1PESl214,214,215
215 DO 9 7 7 IC = 1, Nú 977AR(ICl=O.
IF(DTOL~DESSl240,243,243 243 WRlTE(W,244) 244 FORMAT(/////,27~,'* CARGA MA XI MA *'l 240 WRITE(W,216l!PP,LAMBD 216 FORMAT(/////,15X,'CARREGAMENTO NUMERD',15,' - FATOR DE CARGA •',Fl
*3,10) WRITE(W,67) DO 217 K=l,NJ !F(AC(3*K-2ll219,218,219
218 IF(AC(3*K-llJ219,220,219 220 IF(AC(3*.Kll219,217,219 219 DO 900 1G=l~3
IT=3-IG IF(IDV(3*K-1TL)S01,901,902
902 ACC(IGl=ACl3*K-LTl*LAMBD GOTO 900
901 ACClIGl=AC(3*K-ITl SCO CONTINUE
WRITE( W, 70) K, (ACC ( IG), IG=l ,3) 21 7 CONTINUE 214 WRITE(W\8llINT
81 FORMAT(///,30X,'NUMERO OE ITERACDES =',15) C.~ •• RESULTADOS OBTIDOS NO FIM DAS I1ERACOES
WRITE(W,82) 82 FORMAT(////,30Xi'OESLOCAMENTOS DOS NOS 1 ,///,.14X,'N0',15X, 1 X',15X,'

* Y,' , l 3 X , 'RO T • ' , / /l WRITElW,84) (J,Dt·3*J-Zl ,Dt3*J-ll ~Dl3*Jl ,J=l ,NJl
E4 FORMAT(llX,I5,llX,Fl0.5,6X,Fl0.5,6X,Fl0.5,/) WRITElW,83)
83 FORMATl////,30X,'ACOES NAS EXTREMIDADES DOS MEMBROS 1 ,///,36X, 1 NO J * 1 , 4 7 X , • NO K' ,. / / , 3 X , ' ME ~-BR O' , l 4X , ' X• , 14 X, 'Y' , l 3X, ' MZ' , ZOX, 'X ' , l 4X, ' *Y', 13X, 1 MZ 1 ,//l
00 85 I=l,M WR I TE ( W, 86) I; ( AML ( I ,,J l, J=l, 6)
86 FORMAT(2X,15i8X,Fl2.3,3X,Fl2.3,3X,Fl2.3,9X,Fl2.3,Zt3X,Fl2.3),/) DO 87 K'=l, <;
8 7 RI( K l =0, R{ll=CX{'I) R(2l=CY(!) Rl4l=-R(2l R l 5 l =R { 1 l R(9)=1, DO 89 IV=l,3 IT=2-IV JA(1Vl=3*JJlll-lT
89 JA(IV+3)=3*JK(ll-IT DOSO KP=l,t JB=JA'(KPl
-- rr < R u !tJB , > s o, 9 o, 9 r - - -Sl IF(KP-3)92,92,93 92 ARlJB)=l\R(JBl+R'lKPl*AML(I ,l)+R(KP+3).>l<AML(I,2)+R(KP+6l*AML( 1 1 3)
GOTO 90 9 3 AR ( J.B l =AR ( J B l +R,( KP-3 l *AML l l , 4 l +R ( KP l * AML( 1 , 5) +R ( KP +3 l *AML ( 1, 6 l 90 CONTINUE es CONTINUE
WRITE(W,S4l 94 FORMAT(////,30X,'REACOES DE APOI0',///,14X, 1 N0 1 ,l5X,'X',15X, 1 V',14
*X,'MZ',//l DO <;6 K=l,ND !F(RL(Kl)96,96,105
105 ARlK)~ARlKl-AC(Kl 96 CONTINUE
DO 97 KE=3,ND',3 !F(ARlKE-2))96,99,98

99 !F(ARIKE-ll )98,100,98 100 IFIAR'IKEll98,97,98
9 8 K I =K E/ 3 WRITE 111",?0lKI ,ARIKE-21,AR(KE-lE,ARIKEl
97 CONTINUE IF( IPESl63,,t3,226
226 IF(DTOL-DESSll23,63•63 123 DO 260 1C=l,M
PA(ICl=Pl!Cl E A A ( I C ) = EA ( I C ),
2é0 EIA(ICl=EI(ICl IF1IFINl212,212,312
312 DESS:OESS/2, ' GO TO 212
63 CONTINUE GOTO lCl
1000 CAL L EX IT END

SUBROUTINE RIGMBII,L,E~,El,SM,P,NML,LlB,IAUT) REAL KL;L(50l D!MENSION SM(6,6l,P(50l,E!(50l,EAl50l,LIB150,6l,SMA(6,6l SENHIX)=(EXPIXl-EXPI-Xll/2. COSH(Yl~(EXP(Yl+EXP(-Yll/2. 00 l J = 1, 6 00 l K=l,6
l SM(J,K)=O. e:.,, CALCULO DAS FUNCOES DE ESTABILIDADE
ELF=I P(·I l*L ( I l**2l /EI !I l KL=SQRT(ABS(ELF)) !F(KL-0,1)3,7,7
7 I F ( EL F l 2, 3, 4 3 S 1=1.-ELF/lC.
S2=1.-ELF/60~ S3=1,-ELF/30; S4=1,+ELF/6C~ GOTO 25
4 F!=2.-2~•COS(KL)-KL*SIN(Kll Sl=!SINIKLl*KL**3l/(l2,*Fll S 2 = 1 ( 1, -C OS ! K Ll l * K L ** 2 l / ( 6. *F 1 l S 3 = ( K L * ( SI N.! K L l-K L *C OS ( K L l l l / ( 4, * F I l S4=(KL*(KL-SINIKLlll/(2.*FI) GO TO 2 5 . ·- - - - -
2 FI=2,-2,*C0SH(KLl+KL*SENH(KLl S1=(SENH!KLl*KL**3l/!l2.*FI) S2=( ICOSH(KL l-1. l*KL>~*2l/ (6.*FI l S3=1KL*!KL*COSHHKLl-SENH!KLl l l / (4,*FI l S4=!KL*ISENH(KLl-KLtl/!2,*Fll
C •••• MONTAGEM DA MATRIZ DE RIGIDEZ DO MEMBRO 25 IF(IAUTlS,5,.26 26 SM( 1, ll=ABS(EA(Il/L(Ill
GO TO 2 7 5 S M 1 1, ll = EA ! I l / L I I l
27 SM(2,2l=l12,*EI(!l/L(Il**3l*S1 S M ( 3 , 2 l = ( 6 •* E I ( ·! l / L ( I l ** 2 l * S 2 SM13,3l=(4,*EI(Il/L1Ill*S3 S M 1 4, 1 l =-SM ( 1, l l SMl4,4l=SMI 1,ll

SM(5,2)=-SM(2,2) SM(5,3)=-SM(3;2l SM(ó,5l=SM12,2l SM ( 6, 2 l = SM 1 3, 2 l S M ( é, 3 l = 1 2, *E I ( I l / L( I l l * S 4 SM(é,5l=-SM13,2l SM !E, é l = S M ( 3 , 3 l DO 6 J = l, 6 DO 6 K = 1, J
é SM(K,Jl=SM(~.Kl IF(NML)e,8,S
e; NL IB =O DO 10 LB=l,6
10 NLIB=NL1B+L1B(I,LB) IF(NL!BlE,e,.11
11 DO 12 LB=l,é IF(LIB( I,LB):)12,12,13
13 DO lt, J=l,é DO 14 K=l,6
14 SMA(J,K)=SM(J,Kl-(SM(J,LBl*SM(LB,Kll/SM(LB,LB) DO 15 J=l,6 DO 15 K=l,6
15 SM(J,Kl=SMA(J,KI 12 "CONTINUE
S RETURN END

SUBROUT1NE VER!F(AML,I,EA,EI,FCCO,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY *3,E!Y4,EC02,EC35,TIP,RUT,N~NC,TdL,L,P,FY10)
REAL N,M,ND,NS,NO,KX,L(50l ,MS,MO,NC,MC,KL D IM EN S ION A ML!!5 O, 6 l ,EA ( 50 l, E I ( 50 l , YM ( 50 l , AREA 1 50 l , AS 1 10 1, Y S 1 10 l ,P 1
*50l~EIE(5l,EAE(5l ANTG(Zl~Z2,Z3,Z4,Z5,H)=(2.•17.*Zl+32.•z2+12.•z3+32.•Z4+7.*Z5l*H)/4
$ENH(Xll=lEXPIXll-EXP(-Xl) l /2. COSH!X2l=!EXP(X2l+EXP(-X2l)/2.
Cl ••• LEITURA DOS DADOS DA SECAO EM DISCO I l =·1 READlll'll)MF,MFS,YM,AREA,AS,YS,YBl,YB2
Cl ••• CALCULO DOS EG E CV NOS PONTOS 00 MEMBRO EAA=O. E IA =O. H=YB2-YB1 KNAG=O KNEG=O KE=G NS=AML(l,ll CA=C. EO=i.E-10 CALL ESFOR!M,NO,FCCD,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3iESY4,EC02,
-------- --,-EC35;TIP;RUT,EO,.CA,MF,MFS,-YM,-AREA,AS,YS,YB1-,YB2,FY10l- ---------CA=l.E-8/H EO=G. CALL ESFORIMO,A,FCCO,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4,EC02,
OEC35,TIP,RUT,60,CA,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY10) X=O. DX=l( l l /4. EL F =P l I l /E I l I l TET=SQRTIABS!ELF)) KL=TET*Llll DO l K = 1, 5 IFIKL-0.1)60,61,61
60 MS=l(AML(l,é)+AML!I,3)1/l(Ill*X-AML!I,31 GO TO 62
61. KX=TET*X IFIELFl63,60,64

64 M S = ( (AML ( I, é l +A Mlt I ,.3) *CDS ( Kll l *SI N ( KX 1 1 /SI N ( KL )-AML( I, 31 >l<COS ( K X l GOTO 62
63 MS=((AML(l,6)+AMLII~3l*COSH(KLll*SENHIKX))/SENH(KLI-AML(I,3l*COSH( *KX)
62 CV=MS/E III l EG=NS/EA(Il
c •••• NEWTON RAPHSON NC =N S MC=;MS IFIABS(NS)-NOt300,301,301
3CC NC=NO EG=O. CV=O.
301 1FIABS1MSl-MOl302,303,303 302 MC=MO
EG=O. CV=O,
303 DO 2 KI=l,15 CALL ESFORIM,N ,FCCO,FYSD,ESY,F~07,~Y09,ESY1,ESY2,ESY3,ESY4,EC02,
*EC35,TIP,RUT,BG,CV,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY101 IFIRUT-lllS,15,4
15 IFIABSINS-Nl-ABSINC*O•OOOOlll5,5,200 5 IFIABSIMS-Ml-ABSIMC*0.00001))205,205,200
200 ·oEG=IABSIEG*0.001 l+O,OOOOOOll*SIGN(l. ,EG 1 OCV=IABS(CV*O,OOl)+(l.E-61/Hl*SIGNll.,CVl ED=EG+DEG CO=C VfDC V CALL ESFORIA,B ,FCCO,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4,EC02,
*EC35,TIP,RUTiED,CV,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY10) IFIRUT-1.)3,3,4
3 CALL ESFORIC,D ,FCCO,FYSD,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4,EC02, *EC35, TIP ,RUT, EG ,.CD ,MF ,MFS, YM, AREA ,AS, YS ,YB 1, YB2, FY 10)
IFIRUT-1.)203,203,4 203 DERNE=(B-Nl/OBG
D'ERNC = ( 0-N l /DC V OERME=IA-M)/DBG DERMC= IC-M l /OCV QUOC=IOERNC*OERME-DBRNE*DERMC) 1F(QUOC)204,206,204

206
2 205 213 215
210 212
216 214 217
218 219
- - - - -- 220 1
3C 5 404 405 3C4
306 307
331
332 ,--t
RUT=3. GOTO 4 DM=MS-M ON=NS-N OELTE=IDERNC*DM-DERMC*DNl/QUOC OELTC=(DERME*DN-DERNE*DMl/QUOC EG=EG+DELTE CV=CV+OELTC 1F(KE)213,213,214 IF!ABS(NS)-NDl215,215,210 KE=KE+l EAA=NO GOTO 214 I F ( AB S ( EG )- 1 ~ E- l O l 212, 212, 216 EAE!K)=EA!ll GOTO 214 EAE! K) =N /EG !F(ABS(MS)-M0)217,217,218 E I E ( K ) =MO GO TO 1 IF(ABS(CV)-l,E-8/H)219,219,220 EIE(Kl=El(l) GO TO l ElE(K )=M/CV X=X+DX DO 304 K=l,5 IF( EAE(K) )305,305,404 KNEG=KNEG+l !F(E!E(Kl)405~405,304 KNAG=KNAG+l CON.T I NUE IF(KNEGl331,331,306 IF(KNEG-5)307~331,331 EAA=EA< I) GO TO 32 E AA =AN TG ( E A E ( 1 ) , EA E (2) ,E AE ( 3) , E AE ( 4) , E AE ( 5 ) , DX) / L ( I ) IF(ABS(EAA)-N0)332,32,32 EAA =NO. !F(KNAG)l32,132,133
"' o

133 EIA=EICil GO TO 22 2
132 EIA=ANTG(EIECll,EIE(2l,ElE(3l,EIE(4l;EIE(5l,DX)/L(l) 222 IF(KNEG)27,27,7
27 1F(ABSCEACJl-EAAl-ABS(EA(ll*TOLl)7,7,8 7 lF(ABS(EI(Il-EIAl-ElCll*lOLl9,9,8 e NMNC =NMNC+ 1 9El(Il=E·IA
EA( I l =EAA 4 RETLRN
END
o,

SUBROUTINE ESFOR(M,N,FCCD,FYSO,ESY,FY07,FY09,ESY1,ESY2,ESY3,ESY4, •EC02,EC35,TIP,RUT,EG,CV,MF,MFS,YM,AREA,AS,YS,YB1,YB2,FY10l
REAL M,N.NCI,MCI,NSI,MSI OIMENSION YM(50l,AREA(50) ,AS(l0l,YS(10} EX(A,B,C)=-(A+B*C) RUT=l: M=O. N =O.
c:~ .. VERIFICACAO OE ROTURA POR ESMAGAMENTO 00 CONCRETO EBl=EX(EG,YBl,CV) EB2=EX(EG,YB2,CVI IF!EB1-EC35)1;2,2
2 IF(EB2-EC35ll,3,,3 3 IFIEB1~E~2)6,7,7 7 IF!EB118,9,9 8 ECOM=O. 75*( EC02-EB1 )+EC02
IF(ECOM-EB2)9,9,l 6 IF( EB2l ll,9,.9
11 EC0M•0.75*(EC02-EB2).+EC02 IF<ECOM-EB1l9,9,1
1 R:UT=2. RETURN
c.; •• ESFORCOS NO CONCRETO ---- - -·g··oo 4 K=l,MF
EC=EX<EG,YM(KL,CV} SIGMC=0.85*FCCO*(l2.-EC/EC02l*EC/EC02*FUNC(EC,EC02,0.l+FUNCIEC,EC3
*5,EC02) l NCl=SIGMC*AREA(K) MCI=NCI*YM!K) N=N+NCI
4 M=M+MCI C.J •• ESFORCOS NO ACO CA
DO 5 K=l ,MFS E S = EX ( E G , Y SH K ); , CV} I F ( E SY 4-E S l 12, 13 , 13
12 RUT=3. RETURN
13 CALL SIACO(SIGMS,FYSD,ES,ESY,FY07,FY09,ESY1,ESY2,ESY3,TIP,ESY4, FYl *Ol
o, N

NSl=-SlGMS*AS(Kt MSI=NSI~YSCKI N=N+N SI
5 M=M+MSI RETURN ENO
u, w

FUNCTIDN FUNC(EC,El.E2l IFIEC-Elt41,41,42
41 FUNC=O. RETl:RN
42 IF(EC-E2l43,43,41 43 FUNC=l.
RETURN ENO

SUBROUTINE S!l~CO (SlGMS,FYSD,ES ,ESY,FY07 ,FY09 ,ESY1,ESY2, ESY3,TIP, ES *Y4,FY10)
RET!A,B,C,D,El=B+IE-Al*!D-B)/!C-Al IF( TIP) 1, 1,2
1 IF(ESY-ABS!ESll3,3,4 3 SIGMS~FYSD*!IGN(l.,8Sl
RETURN 4 SIGMS=RET( O. ,O. ,ESY,.FYSD,ES).
R ETURN 2 E~S=ABSIESl
IF(ESY1-ESSl5;6,6 6 SIGMS=RET(O.;O.,ESY1,FY07,ES)
RE Tl:R N 5 IF(ESY2-ESS17,8,8 8 SIGMS=RET!ESY1,FY07,ESY2,FV09,ESSl*SIGN!l.,ESl
RETURN ' 7 IF(ESY3-ESS)10,9,9 9 SIGMS=RET(ESY2~FY09,ESV3,FYSD,ESSl*SIGN(l.,ES)
RETURN 10 SIGMS•RET(ESY3,FYSD,ESY4,FY10,ESSl*SIGNl1.,ESl
R ETlRN END
c.n c.n

SUBROUTINE GAUSS(NN,MM,A,Bl OIMENS10N Al75,2ll,Bl75l,C(2ll N=O
100 N'=N +l B(N):B(Nl/AIN,ll IF(N-NNllSC,300,150
150 00 200 K:2,MM C!K ):A(N,Kl
2cc A(N,Kl=A(N,Kl/A(N,ll 00 26C L=2,MM I=N+L-1 IF(NN-1)260,240.240
240 J=O 00 250 K~L ,t',M J =J + l
250 A( I ,J l=ll l I, J l-C(L l>l<A (N ,Kl B l l l =B M l-C ( Ll*B (N)
260 CONTINUE GOTO 100
300 N=N-1 !FlNl350,500,350
350 DO 400 ~=2,r,M L =N+K-1
.. 'TF(NN-L )400,370,370 370 BlNl=B(Nl-AlN,Kl*B(Ll 4CC CONl!NUE
GOTO 3CO 500 RETURN
END
DATA CARTOES
"' "'

[ 1:
. {1 }l
[SM]
157
SIMBOLOGIA
Matriz
Matriz coluna (vetor)
Matriz de rigidez de membro no sistema local de ei
xos.
{D} Vetor que contêm os deslocamentos ,_nodais gener!
lizados do elemento no sistema local de ei.xos.
{A} Vetor que contêm as açoes nas extremidades do ele
mento no sistema local de eixos.
Matriz de rigidez linear ou convencional de membro,
no sistema local de eixos.
Matriz de rigidez geométrica de membro, no sistema
local de eixos.

{Ac}
158
Vetor de cargas nodais da estrutura no sistema glo
bal de eixos.
Matriz de rigidez de membro no sistema global
eixos.
de
[RT] Matriz de rotação.
[s] Matriz de rigidez global.
{d} Vetor de deslocamentos nodais generalizados de to
da a estrutura no sistema global de eixos.
{EA}
Matriz de açoes generalizadas da estrutura nas ex
tremidades de cada membro no sistema local de ei
xos.
Vetor que contêm a rigidez ã deformação axial
cada elemento da estrutura.
de
{EI} Vetor que contêm a rigidez a flexão de cada elemen
to da estrutura.
{p} Vetor que contêm as forças axiais' de cada mem
bro da estrutura, em relação ã geometria indeforma
da.

.{AR}
f yk
1 59
Vetor que contêm as reaçoes de apoio no si s tem a
global de eixos.
Valor característico da tensão de escoamento
aço.
d o
fyd Valor de cãlculo da tensão de escoamento do.aço.
f ck
Valor característico da resistência a
do concreto.
compressao
Valor de cãlculo da resistência a compressao
concreto.
do
EA Rigidez a deformação axial.
EI Rigidez a flexão.
b Largura util de concreto.
E Deformação especifica ao nível do C.G. da seçao de g
CV
M(cv,E) r g
concreto.
Curvatura.
Momento resultante de uma seçao de concreto armado
em relação ao C.G. da seção de concreto quando sub
metida a cv e E. g

160
Esforço normal resultante de uma seçao de concreto
armado quando submetida a cv e E g
M Momento solicitante de uma seção de conc:r_E!_l;_o arma s
do em relação ao C.G. da seção de concreto.
N Esforço normal solicitante de uma seçao de concre s
to armado .
. Fator de carga.
tol Erro~admissfvel na converg~ncia.
dtol Erro admissfvel no valor máximo de~-
L Comprimento do elemento.
p
k
elemento
Força-axial em relação a geometria iQdeformada do elemento.
igual a v'p' EI
Mesmo que membro.











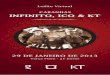




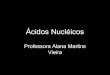








![(2)_Segunda_Lista_de_exercicios_[ Geom Analitica]](https://img.document.onl/doc/110x75/5572011f4979599169a0d786/2segundalistadeexercicios-geom-analitica-55b07ec16c34e.jpg)



