Embed Size (px)
Citation preview

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Laboratório 5
Carlos Amaral
UTFPR - Universidade Tecnológica Federal do ParanáDAELT - Departamento Acadêmico de Eletrotécnica
Curitiba, Abril de 2012.
Cristiano, Curitiba Sistema de Controle

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Resumo
1 Objetivos
2 Sistema de Primeira Ordem
3 Sistema de Segunda Ordem
Cristiano, Curitiba Sistema de Controle

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Atividade 1 - Resposta de Sistema de Primeira Ordem
FUNÇÃO DE TRANSFERÊNCIA
C(s)
sendo, K e τ o ganho e a constante de tempo da planta respectivamente.
(1)
RESPOSTA DO SISTEMA DE PRIMEIRA ORDEM PARA UMA ENTRADA DO TIPO
DEGRAU UNITÁRIO.
Cristiano, Curitiba Sistema de Controle

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Atividade 1 - Resposta de Sistema de Primeira Ordem
Exercício 1
C(s)
Dado a resposta abaixo, determinar a função de transferência G(s):
(1)
RESPOSTA DO SISTEMA DE PRIMEIRA ORDEM PARA UMA ENTRADA DO TIPO
DEGRAU UNITÁRIO.
Cristiano, Curitiba Sistema de Controle
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Am
plit
ude
T=1/a

Objetivos
Sistema de Primeira OrdemSistema de Segunda Ordem
Atividade 1 - Resposta de Sistema de Primeira Ordem
Exercício 1
C(s)
No MatLab, escreva a função de transferência encontrada e plote o gráfico usando
a função step():
(1)
Cristiano, Curitiba Sistema de Controle
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Am
plit
ude
>> s = tf('s');>> gs = …;>> step(gs);

Objetivos
Sistema de Primeira OrdemSistema de Segunda Ordem
Atividade 1 - Resposta de Sistema de Primeira Ordem
Exercício 1
C(s)
Pressionando o botão direito do mouse sobre a figura, determine o tempo de
subida e estabelecimento:
(1)
Cristiano, Curitiba Sistema de Controle
ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Atividade 1 - Resposta de Sistema de Primeira Ordem
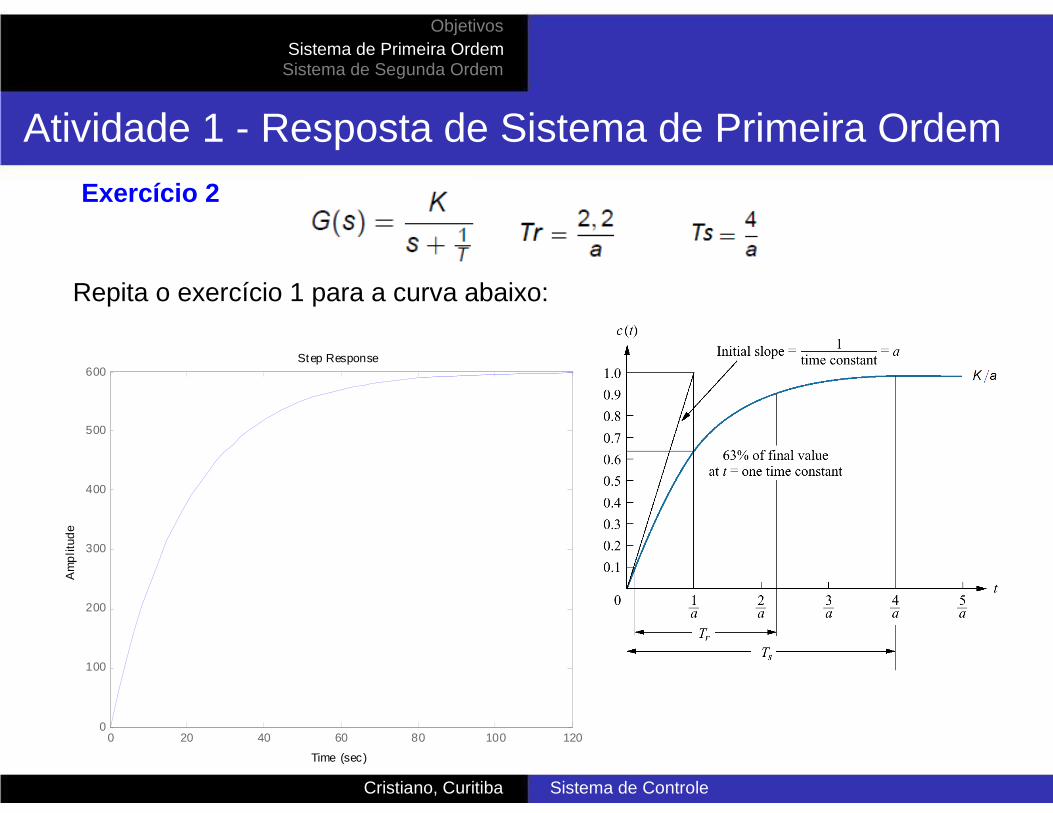
Exercício 2
C(s)
Repita o exercício 1 para a curva abaixo:
(1)
RESPOSTA DO SISTEMA DE PRIMEIRA ORDEM PARA UMA ENTRADA DO TIPO
DEGRAU UNITÁRIO.
Cristiano, Curitiba Sistema de Controle
0 20 40 60 80 100 1200
100
200
300
400
500
600Step Response
Time (sec)
Am
plit
ude

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Atividade 2 - Resposta de Sistema de Segunda Ordem
FUNÇÃO DE TRANSFERÊNCIA PARA UM SISTEMA DE SEGUNDA
ORDEM
sendo, 1 ωn: frequência natural de oscilação
2 ζ:coeficientedeamortecimento √
3 Pólos: s12 = −ζωn ± jωn 1−ζ2
(2)
Cristiano, Curitiba Sistema de Controle

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
CURVAS DE RESPOSTA DE UM SISTEMA DE SEGUNDA ORDEM
A UM DEGRAU UNITÁRIO
Cristiano, Curitiba Sistema de Controle
K

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Características da Resposta de Segunda Ordem Tempo de Pico (Tp): é o tempo onde a resposta atinge o máximo valor. O tempo de pico, Tp pode ser obtido por:
Tp = ωn
π√ , (3)
1−ζ2
Porcentagem de Overshoot (P.O.): a ultrapassagempercentual, P.0., é dada pela seguinte expressão,
ou,
P.O. = 100e−√ 1−ζ2 %, (4)
( )
P.O. = 100 ×
sendo
Mp − Fv Fv %, (5)
MP = valor máximo da resposta,
Fv = valor de regime permanente.
Cristiano, Curitiba Sistema de Controle
)100/..(ln
)10 0/..ln (22 OP
OP
+
−=
πζ

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
Te = 4
ζωn . (6)
Cristiano, Curitiba Sistema de Controle

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 3
Encontre a função de transferência G(s) e confirme a resposta com o MatLab:
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ude
K

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 3
Cálculo do Coeficiente de Amortecimento:
syms coef_amort %Define coef_amort como um símbolo
resp_coef_amort = solve('20=exp(-coef_amort*pi/sqrt(1-coef_amort^2))*100');
double(resp_coef_amort)
P.O.
)100/..(ln
)10 0/..ln (22 OP
OP
+
−=
πζ
ans =
-0.45590.4559

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 3
Cálculo do da frequência natural de oscilação:
syms wn %Define wn como um símbolo
resp_wn = solve('3.2=pi/(wn*sqrt(1-0.46^2))')
double(resp_wn)
Tp
ans =
1.1057

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 3
Cálculo de K:
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ude
1 = K

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 3
Verificar a resposta através da função rlocus():

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 4
Encontre a função de transferência G(s) e confirme a resposta com o MatLab:
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5
3
3.5
4
4.5Step Response
Time (sec)
Am
plit
ude
K

ObjetivosSistema de Primeira Ordem
Sistema de Segunda Ordem
Tempo de Estabelecimento (Te): neste experimento, é o tempo que a resposta leva para atingir ±2% do valor de regime.
4 (6)
Cristiano, Curitiba Sistema de Controle
Exercício 4
Cálculo de K:
3.2 = K
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5
3
3.5
4
4.5Step Response
Time (sec)
Am
plit
ude