Embed Size (px)
Citation preview

9/Abr/2018 – Aula 10
10 Momento de forças. Equilíbrio e estabilidade de sistemas 10.1 Momento de uma força 10.1 Momento da força gtravítica 10.2 Condições de equilíbrio 10.3 Centro de gravidade
1

2
3.2 Primeira Lei de Newton (Lei da Inércia)
Primeira Lei de Newton: se a resultante das forças que atuam numa partícula for nula, então essa partícula livre ou se move sempre em linha reta com velocidade constante (sem aceleração), ou está em repouso.

Para fazer rodar um objeto livre, normalmente aplica-se duas forças, como no exemplo da figura:
3
10.1 Momento de uma força
Essa rotação depende dos sentidos das forças e dos seus pontos de aplicação:

Se o objeto tiver um ponto fixo, bastará uma força para o fazer rodar. As três forças representadas na figura têm a mesma amplitude (mesmo módulo). Qual delas é mais “eficiente” para desapertar o parafuso?
4
10.1 Momento de uma força

A linha de ação da força é a linha definida pelo vetor força.
5
O braço da força é a distância perpendicular entre o ponto de rotação (O) e a linha de ação da força.
O momento da força, relativamente ao ponto de rotação, é o produto da força pelo seu braço:
!τ =!r ×!F
10.1 Momento de uma força
Momento de uma força (1) simulação

6
a bc d
= ad −bc
Produto externo de vetores
a1 a2 a3b1 b2 b3c1 c2 c3
= a1b2 b3c2 c3
− a2b1 b3c1 c3
+ a3b1 b2c1 c2
= a1 b2c3 −b3c2( )− a2 b1c3 −b3c1( )+ a3 b1c2 −b2c1( )

7
Produto externo de vetores !a = a1
!ex + a2
!ey + a3
!ez
!b = b1
!ex +b2
!ey +b3
!ez
!a ×!b =
!ex!ey
!ez
a1 a2 a3b1 b2 b3
=!ex
a2 a3b2 b3
−!ey
a1 a3b1 b3
+!ez
a1 a2b1 b2
!a ×!b =!ex a2b3 − a3b2( )− !ey a1b3 − a3b1( )+ !ez a1b2 − a2b1( )

8
Produto externo de vetores
!a = a1
!ex + a2
!ey + a3
!ez
!b = b1
!ex +b2
!ey +b3
!ez
!a ×!b = !a
!b senθ
Área = !a ×!b = !a
!b senθ

9
!τ =!r ×!FO sentido do momento da força pode ser
determinado pela regra da mão direita:
Diagrama de forças:
10.1 Momento de uma força

Se o momento provocar uma aceleração angular com o sentido anti-horário, é positivo. No caso contrário, é negativo.
10
10.1 Momento de uma força
Sentido anti - horário : τ > 0Sentido horário : τ < 0
!τ =!r ×!F

A capacidade de uma força para provocar uma rotação (ou torção) depende de três parâmetros:
11
Estes três parâmetros definem o momento da força:
1. a amplitude (módulo) da força; 2. a distância entre o ponto de
aplicação da força e o eixo de rotação;
3. o ângulo φ de aplicação da força.
τ = r F senφ
!τ =!r ×!F
τ⎡⎣ ⎤⎦= Nm
10.1 Momento de uma força
Momento de uma força (2) simulação

Pode-se interpretar o momento da força de duas maneiras:
12
O momento da força é o produto da distância r (desde o ponto de oscilação ao ponto de aplicação da força) pela componente tangencial da força (Ft = F sen φ):
τ = r F senφ( ) = r Ft
O momento da força é a força F que atua na distância perpendicular d = r sen φ (o braço da força), entre o ponto de oscilação e a linha de ação de F:
τ = F rsenφ( ) = F d
d
10.1 Momento de uma força

Um objeto fixado num ponto pode rodar por ação da força gravítica. O momento da força gravítica que atua na partícula i é igual a :
13
10.2 Momento da força gravítica
τ i = −xi mig( )O sinal negativo nesta expressão deve-se ao seguinte: partículas para a direita da origem (x>0) causam momentos com o sentido horário (negativos, por convenção).
τgrav = τ ii∑ = −ximig( )
i∑ = −g ximi
i∑
ximii∑ =M xCMComo τgrav = −M g xCM

Exemplo A barra de aço da figura tem massa M = 500 kg e comprimento L = 4 m. A barra está apoiada num ponto situado a 1,2 m da extremidade do lado direito e pode rodar em torno desse ponto. Qual é o momento da força gravítica?
14
τgrav = −(500 kg)(9,80 m/s2)(−0,80m)
= 3920 Nm
τgrav = −M g xCM
Se o ponto de rotação estiver na linha de ação da força gravítica, ou seja, se passar pelo centro de massa, o momento será igual a zero: τgrav=0.

Para que um objeto esteja em equilíbrio, é necessário que se verifiquem duas condições, simultaneamente:
15
10.3 Condições de equilíbrio
11.2 Center of Gravity 345
11.1 Conditions for EquilibriumWe learned in Sections 4.2 and 5.1 that a particle is in equilibrium—that is, theparticle does not accelerate—in an inertial frame of reference if the vector sum ofall the forces acting on the particle is zero, For an extended body, theequivalent statement is that the center of mass of the body has zero acceleration ifthe vector sum of all external forces acting on the body is zero, as discussed inSection 8.5. This is often called the first condition for equilibrium. In vectorand component forms,
(first condition for equilibrium)
(11.1)
A second condition for an extended body to be in equilibrium is that the bodymust have no tendency to rotate. This condition is based on the dynamics of rota-tional motion in exactly the same way that the first condition is based on New-ton’s first law. A rigid body that, in an inertial frame, is not rotating about acertain point has zero angular momentum about that point. If it is not to startrotating about that point, the rate of change of angular momentum must also bezero. From the discussion in Section 10.5, particularly Eq. (10.29), this meansthat the sum of torques due to all the external forces acting on the body must bezero. A rigid body in equilibrium can’t have any tendency to start rotating aboutany point, so the sum of external torques must be zero about any point. This is thesecond condition for equilibrium:
(11.2)
The sum of the torques due to all external forces acting on the body, with respectto any specified point, must be zero.
In this chapter we will apply the first and second conditions for equilibrium tosituations in which a rigid body is at rest (no translation or rotation). Such a bodyis said to be in static equilibrium (Fig. 11.1). But the same conditions apply to arigid body in uniform translational motion (without rotation), such as an airplanein flight with constant speed, direction, and altitude. Such a body is in equilib-rium but is not static.
aTS ! 0 about any point (second condition for equilibrium)
aFx = 0 aFy = 0 aFz = 0
aFS
! 0
gFS
! 0.
Test Your Understanding of Section 11.1 Which situation satisfiesboth the first and second conditions for equilibrium? (i) a seagull gliding at aconstant angle below the horizontal and at a constant speed; (ii) an automobilecrankshaft turning at an increasing angular speed in the engine of a parked car; (iii) a thrown baseball that does not rotate as it sails through the air. ❙
11.2 Center of GravityIn most equilibrium problems, one of the forces acting on the body is its weight.We need to be able to calculate the torque of this force. The weight doesn’t act at asingle point; it is distributed over the entire body. But we can always calculate thetorque due to the body’s weight by assuming that the entire force of gravity(weight) is concentrated at a point called the center of gravity (abbreviated “cg”).The acceleration due to gravity decreases with altitude; but if we can ignore thisvariation over the vertical dimension of the body, then the body’s center of gravityis identical to its center of mass (abbreviated “cm”), which we defined in Sec-tion 8.5. We stated this result without proof in Section 10.2, and now we’ll prove it.
Equilibrium conditions:
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition NOTsatisfied: There is a netupward force, so body at restwill start moving upward.
Axis of rotation (perpendicular to figure)
F
F
F
2F
l l
2F
l
F
F
l l
l
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
Second condition NOTsatisfied: There is a netclockwise torque about theaxis, so body at rest will startrotating clockwise.
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
12
(a) This body is in static equilibrium.
(b) This body has no tendency to accelerate asa whole, but it has a tendency to start rotating.
(c) This body has a tendency to accelerate as awhole but no tendency to start rotating.
11.1 To be in static equilibrium, a bodyat rest must satisfy both conditions forequilibrium: It can have no tendency toaccelerate as a whole or to start rotating.
!F∑ =!0
!τ∑ =!0
1. A soma de todas as forças aplicadas tem de ser igual a zero
2. A soma de todos os momentos das forças, relativamente a qualquer ponto, tem de ser igual a zero

Para que um objeto esteja em equilíbrio, é necessário que se verifiquem duas condições, simultaneamente:
16
!F∑ =!0
!τ∑ =!0
11.2 Center of Gravity 345
11.1 Conditions for EquilibriumWe learned in Sections 4.2 and 5.1 that a particle is in equilibrium—that is, theparticle does not accelerate—in an inertial frame of reference if the vector sum ofall the forces acting on the particle is zero, For an extended body, theequivalent statement is that the center of mass of the body has zero acceleration ifthe vector sum of all external forces acting on the body is zero, as discussed inSection 8.5. This is often called the first condition for equilibrium. In vectorand component forms,
(first condition for equilibrium)
(11.1)
A second condition for an extended body to be in equilibrium is that the bodymust have no tendency to rotate. This condition is based on the dynamics of rota-tional motion in exactly the same way that the first condition is based on New-ton’s first law. A rigid body that, in an inertial frame, is not rotating about acertain point has zero angular momentum about that point. If it is not to startrotating about that point, the rate of change of angular momentum must also bezero. From the discussion in Section 10.5, particularly Eq. (10.29), this meansthat the sum of torques due to all the external forces acting on the body must bezero. A rigid body in equilibrium can’t have any tendency to start rotating aboutany point, so the sum of external torques must be zero about any point. This is thesecond condition for equilibrium:
(11.2)
The sum of the torques due to all external forces acting on the body, with respectto any specified point, must be zero.
In this chapter we will apply the first and second conditions for equilibrium tosituations in which a rigid body is at rest (no translation or rotation). Such a bodyis said to be in static equilibrium (Fig. 11.1). But the same conditions apply to arigid body in uniform translational motion (without rotation), such as an airplanein flight with constant speed, direction, and altitude. Such a body is in equilib-rium but is not static.
aTS ! 0 about any point (second condition for equilibrium)
aFx = 0 aFy = 0 aFz = 0
aFS
! 0
gFS
! 0.
Test Your Understanding of Section 11.1 Which situation satisfiesboth the first and second conditions for equilibrium? (i) a seagull gliding at aconstant angle below the horizontal and at a constant speed; (ii) an automobilecrankshaft turning at an increasing angular speed in the engine of a parked car; (iii) a thrown baseball that does not rotate as it sails through the air. ❙
11.2 Center of GravityIn most equilibrium problems, one of the forces acting on the body is its weight.We need to be able to calculate the torque of this force. The weight doesn’t act at asingle point; it is distributed over the entire body. But we can always calculate thetorque due to the body’s weight by assuming that the entire force of gravity(weight) is concentrated at a point called the center of gravity (abbreviated “cg”).The acceleration due to gravity decreases with altitude; but if we can ignore thisvariation over the vertical dimension of the body, then the body’s center of gravityis identical to its center of mass (abbreviated “cm”), which we defined in Sec-tion 8.5. We stated this result without proof in Section 10.2, and now we’ll prove it.
Equilibrium conditions:
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition NOTsatisfied: There is a netupward force, so body at restwill start moving upward.
Axis of rotation (perpendicular to figure)
F
F
F
2F
l l
2F
l
F
F
l l
l
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
Second condition NOTsatisfied: There is a netclockwise torque about theaxis, so body at rest will startrotating clockwise.
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
12
(a) This body is in static equilibrium.
(b) This body has no tendency to accelerate asa whole, but it has a tendency to start rotating.
(c) This body has a tendency to accelerate as awhole but no tendency to start rotating.
11.1 To be in static equilibrium, a bodyat rest must satisfy both conditions forequilibrium: It can have no tendency toaccelerate as a whole or to start rotating.
11.2 Center of Gravity 345
11.1 Conditions for EquilibriumWe learned in Sections 4.2 and 5.1 that a particle is in equilibrium—that is, theparticle does not accelerate—in an inertial frame of reference if the vector sum ofall the forces acting on the particle is zero, For an extended body, theequivalent statement is that the center of mass of the body has zero acceleration ifthe vector sum of all external forces acting on the body is zero, as discussed inSection 8.5. This is often called the first condition for equilibrium. In vectorand component forms,
(first condition for equilibrium)
(11.1)
A second condition for an extended body to be in equilibrium is that the bodymust have no tendency to rotate. This condition is based on the dynamics of rota-tional motion in exactly the same way that the first condition is based on New-ton’s first law. A rigid body that, in an inertial frame, is not rotating about acertain point has zero angular momentum about that point. If it is not to startrotating about that point, the rate of change of angular momentum must also bezero. From the discussion in Section 10.5, particularly Eq. (10.29), this meansthat the sum of torques due to all the external forces acting on the body must bezero. A rigid body in equilibrium can’t have any tendency to start rotating aboutany point, so the sum of external torques must be zero about any point. This is thesecond condition for equilibrium:
(11.2)
The sum of the torques due to all external forces acting on the body, with respectto any specified point, must be zero.
In this chapter we will apply the first and second conditions for equilibrium tosituations in which a rigid body is at rest (no translation or rotation). Such a bodyis said to be in static equilibrium (Fig. 11.1). But the same conditions apply to arigid body in uniform translational motion (without rotation), such as an airplanein flight with constant speed, direction, and altitude. Such a body is in equilib-rium but is not static.
aTS ! 0 about any point (second condition for equilibrium)
aFx = 0 aFy = 0 aFz = 0
aFS
! 0
gFS
! 0.
Test Your Understanding of Section 11.1 Which situation satisfiesboth the first and second conditions for equilibrium? (i) a seagull gliding at aconstant angle below the horizontal and at a constant speed; (ii) an automobilecrankshaft turning at an increasing angular speed in the engine of a parked car; (iii) a thrown baseball that does not rotate as it sails through the air. ❙
11.2 Center of GravityIn most equilibrium problems, one of the forces acting on the body is its weight.We need to be able to calculate the torque of this force. The weight doesn’t act at asingle point; it is distributed over the entire body. But we can always calculate thetorque due to the body’s weight by assuming that the entire force of gravity(weight) is concentrated at a point called the center of gravity (abbreviated “cg”).The acceleration due to gravity decreases with altitude; but if we can ignore thisvariation over the vertical dimension of the body, then the body’s center of gravityis identical to its center of mass (abbreviated “cm”), which we defined in Sec-tion 8.5. We stated this result without proof in Section 10.2, and now we’ll prove it.
Equilibrium conditions:
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition satisfied:Net force = 0, so body at resthas no tendency to startmoving as a whole.
First condition NOTsatisfied: There is a netupward force, so body at restwill start moving upward.
Axis of rotation (perpendicular to figure)
F
F
F
2F
l l
2F
l
F
F
l l
l
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
Second condition NOTsatisfied: There is a netclockwise torque about theaxis, so body at rest will startrotating clockwise.
Second condition satisfied:Net torque about the axis = 0,so body at rest has notendency to start rotating.
12
(a) This body is in static equilibrium.
(b) This body has no tendency to accelerate asa whole, but it has a tendency to start rotating.
(c) This body has a tendency to accelerate as awhole but no tendency to start rotating.
11.1 To be in static equilibrium, a bodyat rest must satisfy both conditions forequilibrium: It can have no tendency toaccelerate as a whole or to start rotating.
10.3 Condições de equilíbrio

A condição não significa que o objeto não tenha movimento de translação.
17
vCM = 0
Portanto, um objeto em equilíbrio estático não pode ter velocidade linear nem angular:
ω = 0
Diz-se que um objeto está em equilíbrio estático se estiver em repouso. Está em equilíbrio dinâmico se o seu centro de massa se mover com velocidade constante.
!F∑ =!0
Se o objeto se mover com velocidade constante, cumpre a condição anterior e não está parado.
10.3 Condições de equilíbrio

O equilíbrio rotacional pode ser classificado em três categorias: 1. estável (o momento, devido a uma pequena deslocação angular, tende a rodar
o objeto de volta à posição de equilíbrio) - (a) 2. instável (o objeto tende a afastar-se da posição de equilíbrio) - (b) 3. neutro (o objeto roda, mas nem regressa à posição de equilíbrio, nem tende a
afastar-se dela) - (c)
18
Stability of Rotational Equilibrium S E C T I O N 1 2 - 5 | 407
SOLVE
1. Draw a free-body diagram of the block (Figure 12-19). L
fsffFn
h
h/2
acm
x
y
F I G U R E 1 2 - 1 9
2. Apply to the block, and then solve forthe normal force:
©Fy ! macmy so Fn ! mgFn " mg ! 0
3. Apply to the block:©Fx ! macmx fs ! ma
4. Apply ©tcm ! 0: where d # 12Lfs
h2
" Fnd ! 0,
5. If then the acceleration is maximum.Substitute for for and for andsolve for amax:
Fn,mgfs,mamaxd,12L
d ! 12L, so L
hgamax !mamax
h2
" mgL2
! 0
CG
CG
CGArc
(a) (b)(c)
F I G U R E 1 2 - 2 0 If slight rotation raises the center of gravity, as in (a), the equilibrium isstable. If a slight rotation lowers the center of gravity, as in (b), the equilibrium is unstable. If aslight rotation neither raises nor lowers the center of gravity, as in (c), the equilibrium is neutral.
CHECK One would expect to be larger for a short wide block (small and large ) thanfor a tall narrow block (large and small ). Our step-5 result meets this expectation.
12-5 STABILITY OF ROTATIONAL EQUILIBRIUM
There are three categories of rotational equilibrium for an object: stable, unstable,or neutral. Stable rotational equilibrium occurs when the torques that arise froma small angular displacement of the object from equilibrium tend to rotate the ob-ject back toward its equilibrium orientation. Stable equilibrium is illustrated inFigure 12-20a. When the cone is tipped slightly as shown, the resulting gravita-tional torque about the pivot point tends to restore the cone to its original orienta-tion. Note that this slight tipping lifts the center of gravity, increasing the gravita-tional potential energy.
Unstable rotational equilibrium, illustrated in Figure 12-20b, occurs when thetorques that arise from a small angular displacement of the object tends to rotatethe object even farther away from its equilibrium orientation. A slight tipping ofthe cone causes it to fall over because the torque due to the gravitational forcetends to rotate it away from its original orientation. Here the rotation lowers thecenter of gravity and decreases the gravitational potential energy.
The cone resting on a horizontal surface in Figure 12-20c illustrates neutralrotational equilibrium. If the cone is rolled slightly, there is no torque that tends
LhLhamax
10.3 Condições de equilíbrio

Pode-se considerar que todo o peso de um objeto está concentrado num único ponto, chamado centro de gravidade (CG):
19
10.4 Centro de gravidade
Se se puder desprezar a variação da gravidade com a altitude, por exemplo, o centro de gravidade confunde-se com o centro de massa.
346 CHAPTER 11 Equilibrium and Elasticity
First let’s review the definition of the center of mass. For a collection of parti-cles with masses and coordinates thecoordinates and of the center of mass are given by
(center of mass) (11.3)
Also, and are the components of the position vector of the cen-ter of mass, so Eqs. (11.3) are equivalent to the vector equation
(11.4)
Now consider the gravitational torque on a body of arbitrary shape (Fig. 11.2).We assume that the acceleration due to gravity is the same at every point in thebody. Every particle in the body experiences a gravitational force, and the totalweight of the body is the vector sum of a large number of parallel forces. A typi-cal particle has mass and weight If is the position vector of thisparticle with respect to an arbitrary origin O, then the torque vector of theweight with respect to O is, from Eq. (10.3),
The total torque due to the gravitational forces on all the particles is
When we multiply and divide this by the total mass of the body,
we get
The fraction in this equation is just the position vector of the center of mass,with components and as given by Eq. (11.4), and is equal tothe total weight of the body. Thus
(11.5)TS ! rScm : MgS ! rScm : wS
wSMgSzcm,ycm,xcm,
rScm
TS !
m1 rS1 " m2 rS2 " Ám1 + m2 + Á : MgS !
ai
mi rS
i
ai
mi
: MgS
M = m1 + m2 + Á = ai
mi
! ¢ai
mi rS
i≤ : gS
! 1m1 rS1 " m2 rS2 " Á 2 : gS
TS ! a
iTiS ! rS1 : m1gS " rS2 : m2gS " Á
TS
i ! rSi : wSi ! rSi : mi gSwSi
TS
i
rSiwSi ! mi gS.mi
gS
rScm !m1 rS1 " m2 rS2 " m3 rS3 " Á
m1 + m2 + m3 + Á !a
imi r
Si
ai
mi
rScmz cmycm,xcm,
z cm =m1z1 + m2z2 + m3z3 + Á
m1 + m2 + m3 + Á =a
imiz i
ai
mi
ycm =m1y1 + m2y2 + m3y3 + Á
m1 + m2 + m3 + Á =a
imiyi
ai
mi
xcm =m1x1 + m2x2 + m3x3 + Á
m1 + m2 + m3 + Á =a
imix i
ai
mi
zcmycm,xcm,z22, Á ,y2,1x2,z12,y1,1x1,m2, Ám1,
ri
y
x
z
O
w 5 Mg
cg 5 cm
wi 5 mi g
mi
rcm
S
The net gravitational torque about O on theentire body can be found by assuming that allthe weight acts at the cg: t 5 rcm 3 w.S S S
The gravitational torque about Oon a particle of mass mi withinthe body is: ti 5 ri 3 wi.
S S S
If g has the same value at allpoints on the body, the cg isidentical to the cm.
S
S
S S
S S
11.2 The center of gravity (cg) and cen-ter of mass (cm) of an extended body.
!rCM = mi!ri
i∑ mi
i∑
!rCG =migi!ri
i∑
migii∑

Momento da força gravítica sobre um objeto:
20
346 CHAPTER 11 Equilibrium and Elasticity
First let’s review the definition of the center of mass. For a collection of parti-cles with masses and coordinates thecoordinates and of the center of mass are given by
(center of mass) (11.3)
Also, and are the components of the position vector of the cen-ter of mass, so Eqs. (11.3) are equivalent to the vector equation
(11.4)
Now consider the gravitational torque on a body of arbitrary shape (Fig. 11.2).We assume that the acceleration due to gravity is the same at every point in thebody. Every particle in the body experiences a gravitational force, and the totalweight of the body is the vector sum of a large number of parallel forces. A typi-cal particle has mass and weight If is the position vector of thisparticle with respect to an arbitrary origin O, then the torque vector of theweight with respect to O is, from Eq. (10.3),
The total torque due to the gravitational forces on all the particles is
When we multiply and divide this by the total mass of the body,
we get
The fraction in this equation is just the position vector of the center of mass,with components and as given by Eq. (11.4), and is equal tothe total weight of the body. Thus
(11.5)TS ! rScm : MgS ! rScm : wS
wSMgSzcm,ycm,xcm,
rScm
TS !
m1 rS1 " m2 rS2 " Ám1 + m2 + Á : MgS !
ai
mi rS
i
ai
mi
: MgS
M = m1 + m2 + Á = ai
mi
! ¢ai
mi rS
i≤ : gS
! 1m1 rS1 " m2 rS2 " Á 2 : gS
TS ! a
iTiS ! rS1 : m1gS " rS2 : m2gS " Á
TS
i ! rSi : wSi ! rSi : mi gSwSi
TS
i
rSiwSi ! mi gS.mi
gS
rScm !m1 rS1 " m2 rS2 " m3 rS3 " Á
m1 + m2 + m3 + Á !a
imi r
Si
ai
mi
rScmz cmycm,xcm,
z cm =m1z1 + m2z2 + m3z3 + Á
m1 + m2 + m3 + Á =a
imiz i
ai
mi
ycm =m1y1 + m2y2 + m3y3 + Á
m1 + m2 + m3 + Á =a
imiyi
ai
mi
xcm =m1x1 + m2x2 + m3x3 + Á
m1 + m2 + m3 + Á =a
imix i
ai
mi
zcmycm,xcm,z22, Á ,y2,1x2,z12,y1,1x1,m2, Ám1,
ri
y
x
z
O
w 5 Mg
cg 5 cm
wi 5 mi g
mi
rcm
S
The net gravitational torque about O on theentire body can be found by assuming that allthe weight acts at the cg: t 5 rcm 3 w.S S S
The gravitational torque about Oon a particle of mass mi withinthe body is: ti 5 ri 3 wi.
S S S
If g has the same value at allpoints on the body, the cg isidentical to the cm.
S
S
S S
S S
11.2 The center of gravity (cg) and cen-ter of mass (cm) of an extended body.
!τg =
!ri ×mi!g( )
i∑ = mi
!rii∑⎛
⎝⎜⎜
⎞
⎠⎟⎟×!g
1= MM
= mii∑ mi
i∑Multiplicando por
!τg =
mi!ri
i∑
mii∑
×M!g
!τg =
!rCM ×M!g
10.4 Centro de gravidade

Método simples para se determinar experimentalmente a posição do centro de gravidade:
21
11.2 Center of Gravity 347
The total gravitational torque, given by Eq. (11.5), is the same as though thetotal weight were acting on the position of the center of mass, which wealso call the center of gravity. If has the same value at all points on a body,its center of gravity is identical to its center of mass. Note, however, that thecenter of mass is defined independently of any gravitational effect.
While the value of does vary somewhat with elevation, the variation isextremely slight (Fig. 11.3). Hence we will assume throughout this chapter thatthe center of gravity and center of mass are identical unless explicitly statedotherwise.
Finding and Using the Center of GravityWe can often use symmetry considerations to locate the center of gravity of abody, just as we did for the center of mass. The center of gravity of a homoge-neous sphere, cube, circular sheet, or rectangular plate is at its geometric cen-ter. The center of gravity of a right circular cylinder or cone is on its axis ofsymmetry.
For a body with a more complex shape, we can sometimes locate the center ofgravity by thinking of the body as being made of symmetrical pieces. For exam-ple, we could approximate the human body as a collection of solid cylinders,with a sphere for the head. Then we can locate the center of gravity of the combi-nation with Eqs. (11.3), letting be the masses of the individual piecesand be the coordinates of their centers of gravity.
When a body acted on by gravity is supported or suspended at a single point,the center of gravity is always at or directly above or below the point of suspen-sion. If it were anywhere else, the weight would have a torque with respect to thepoint of suspension, and the body could not be in rotational equilibrium. Figure11.4 shows how to use this fact to determine experimentally the location of thecenter of gravity of an irregular body.
Using the same reasoning, we can see that a body supported at several pointsmust have its center of gravity somewhere within the area bounded by the sup-ports. This explains why a car can drive on a straight but slanted road if the slantangle is relatively small (Fig. 11.5a) but will tip over if the angle is too steep (Fig.11.5b). The truck in Fig. 11.5c has a higher center of gravity than the car and willtip over on a shallower incline. When a truck overturns on a highway and blockstraffic for hours, it’s the high center of gravity that’s to blame.
The lower the center of gravity and the larger the area of support, the moredifficult it is to overturn a body. Four-legged animals such as deer and horseshave a large area of support bounded by their legs; hence they are naturally stableand need only small feet or hooves. Animals that walk erect on two legs, such ashumans and birds, need relatively large feet to give them a reasonable area of
z22, Áy2,1x2,z12,y1,1x1,m2, Ám1,
gS
gSrScmwS
Center of gravity is overthe area of support: caris in equilibrium.
Center of gravity is outside the area of support: vehicle tips over.
The higher the centerof gravity, the smallerthe incline needed totip the vehicle over.
(a)
wS
(b)
wSArea of support
(c)
wS
cg cg
cg
11.5 In (a) the center of gravity is within the area bounded by the supports, and the caris in equilibrium. The car in (b) and the truck in (c) will tip over because their centers ofgravity lie outside the area of support.
11.3 The acceleration due to gravity atthe bottom of the 452-m-tall PetronasTowers in Malaysia is only 0.014% greaterthan at the top. The center of gravity of thetowers is only about 2 cm below the centerof mass.
Suspend the mugfrom any point. Avertical line extendingdown from the point ofsuspension passesthrough the center ofgravity.
Center of gravity
What is the center of gravity of this mug?
1
2 Now suspend themug from a differentpoint. A vertical lineextending down from thispoint intersects the firstline at the center ofgravity (which is insidethe mug).
11.4 Finding the center of gravity of anirregularly shaped body—in this case, acoffee mug.
10.4 Centro de gravidade

Consequências da posição do centro de gravidade:
22
10.4 Centro de gravidade

Consequências da posição do centro de gravidade:
23
11.2 Center of Gravity 347
The total gravitational torque, given by Eq. (11.5), is the same as though thetotal weight were acting on the position of the center of mass, which wealso call the center of gravity. If has the same value at all points on a body,its center of gravity is identical to its center of mass. Note, however, that thecenter of mass is defined independently of any gravitational effect.
While the value of does vary somewhat with elevation, the variation isextremely slight (Fig. 11.3). Hence we will assume throughout this chapter thatthe center of gravity and center of mass are identical unless explicitly statedotherwise.
Finding and Using the Center of GravityWe can often use symmetry considerations to locate the center of gravity of abody, just as we did for the center of mass. The center of gravity of a homoge-neous sphere, cube, circular sheet, or rectangular plate is at its geometric cen-ter. The center of gravity of a right circular cylinder or cone is on its axis ofsymmetry.
For a body with a more complex shape, we can sometimes locate the center ofgravity by thinking of the body as being made of symmetrical pieces. For exam-ple, we could approximate the human body as a collection of solid cylinders,with a sphere for the head. Then we can locate the center of gravity of the combi-nation with Eqs. (11.3), letting be the masses of the individual piecesand be the coordinates of their centers of gravity.
When a body acted on by gravity is supported or suspended at a single point,the center of gravity is always at or directly above or below the point of suspen-sion. If it were anywhere else, the weight would have a torque with respect to thepoint of suspension, and the body could not be in rotational equilibrium. Figure11.4 shows how to use this fact to determine experimentally the location of thecenter of gravity of an irregular body.
Using the same reasoning, we can see that a body supported at several pointsmust have its center of gravity somewhere within the area bounded by the sup-ports. This explains why a car can drive on a straight but slanted road if the slantangle is relatively small (Fig. 11.5a) but will tip over if the angle is too steep (Fig.11.5b). The truck in Fig. 11.5c has a higher center of gravity than the car and willtip over on a shallower incline. When a truck overturns on a highway and blockstraffic for hours, it’s the high center of gravity that’s to blame.
The lower the center of gravity and the larger the area of support, the moredifficult it is to overturn a body. Four-legged animals such as deer and horseshave a large area of support bounded by their legs; hence they are naturally stableand need only small feet or hooves. Animals that walk erect on two legs, such ashumans and birds, need relatively large feet to give them a reasonable area of
z22, Áy2,1x2,z12,y1,1x1,m2, Ám1,
gS
gSrScmwS
Center of gravity is overthe area of support: caris in equilibrium.
Center of gravity is outside the area of support: vehicle tips over.
The higher the centerof gravity, the smallerthe incline needed totip the vehicle over.
(a)
wS
(b)
wSArea of support
(c)
wS
cg cg
cg
11.5 In (a) the center of gravity is within the area bounded by the supports, and the caris in equilibrium. The car in (b) and the truck in (c) will tip over because their centers ofgravity lie outside the area of support.
11.3 The acceleration due to gravity atthe bottom of the 452-m-tall PetronasTowers in Malaysia is only 0.014% greaterthan at the top. The center of gravity of thetowers is only about 2 cm below the centerof mass.
Suspend the mugfrom any point. Avertical line extendingdown from the point ofsuspension passesthrough the center ofgravity.
Center of gravity
What is the center of gravity of this mug?
1
2 Now suspend themug from a differentpoint. A vertical lineextending down from thispoint intersects the firstline at the center ofgravity (which is insidethe mug).
11.4 Finding the center of gravity of anirregularly shaped body—in this case, acoffee mug.
10.4 Centro de gravidade

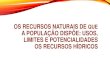
Exemplo A prancha de madeira da figura tem comprimento L = 3 m, massa M = 35 kg e está apoiada em duas balanças, que distam d = 0,5 m das extremidades da prancha. Admitindo que a prancha fica em equilíbrio quando uma pessoa, com massa m =45 kg, sobe para uma das extremidades, quais são os valores que as balanças indicam?
24
Prancha
m

25
Fy∑ = 0!F∑ =!0
Fesq + Fdir −Mg −mg = 0
!Fesq
!Fdir
!Fesq e
!Fdir são as forças
exercidas pela balança da esquerda e da direita, respetivamente.
τ∑ = (0)× Fesq + L− 2d( )× Fdir −L− 2d2
⎛
⎝⎜
⎞
⎠⎟×Mg + d ×mg = 0
Admitindo que a prancha não roda, mas que, se o fizesse, seria em torno do ponto de aplicação de :
!Fesq
!τ∑ =!0
⊗ (−)(+)⋅
Exemplo A prancha de madeira da figura tem comprimento L = 3 m, massa M = 35 kg e está apoiada em duas balanças, que distam d = 0,5 m das extremidades da prancha. Admitindo que a prancha fica em equilíbrio quando uma pessoa, com massa m =45 kg, sobe para uma das extremidades, quais são os valores que as balanças indicam?
(+)⋅

26
!Fesq
!Fdir
!Fesq e
!Fdir são as forças
exercidas pela balança da esquerda e da direita, respetivamente.
Exemplo A prancha de madeira da figura tem comprimento L = 3 m, massa M = 35 kg e está apoiada em duas balanças, que distam d = 0,5 m das extremidades da prancha. Admitindo que a prancha fica em equilíbrio quando uma pessoa, com massa m =45 kg, sobe para uma das extremidades, quais são os valores que as balanças indicam?
Fdir =M2−d mL− 2d
⎛
⎝⎜
⎞
⎠⎟g
= 61N
Fesq =Mg +mg − Fdir= 723N

350 CHAPTER 11 Equilibrium and Elasticity
Example 11.3 Will the ladder slip?
Sir Lancelot, who weighs 800 N, is assaulting a castle by climbinga uniform ladder that is 5.0 m long and weighs 180 N (Fig. 11.9a).The bottom of the ladder rests on a ledge and leans across the moatin equilibrium against a frictionless, vertical castle wall. The laddermakes an angle of with the horizontal. Lancelot pauses one-third of the way up the ladder. (a) Find the normal and friction forceson the base of the ladder. (b) Find the minimum coefficient of staticfriction needed to prevent slipping at the base. (c) Find the magni-tude and direction of the contact force on the base of the ladder.
SOLUTION
IDENTIFY and SET UP: The ladder–Lancelot system is stationary,so we can use the two conditions for equilibrium to solve part (a).In part (b), we need the relationship among the static friction force,the coefficient of static friction, and the normal force (see Section5.3). In part (c), the contact force is the vector sum of the normaland friction forces acting at the base of the ladder, found in part (a).Figure 11.9b shows the free-body diagram, with x- and y-directionsas shown and with counterclockwise torques taken to be positive.The ladder’s center of gravity is at its geometric center. Lancelot’s800-N weight acts at a point one-third of the way up the ladder.
The wall exerts only a normal force on the top of the ladder.The forces on the base are an upward normal force and a staticfriction force which must point to the right to prevent slipping.The magnitudes and are the target variables in part (a). FromEq. (5.6), these magnitudes are related by the coeffi-cient of static friction is the target variable in part (b).
EXECUTE: (a) From Eqs. (11.6), the first condition for equilibriumgives
These are two equations for the three unknowns and The second equation gives . To obtain a third equa-tion, we use the second condition for equilibrium. We take torquesabout point B, about which and have no torque. The 53.1°angle creates a 3-4-5 right triangle, so from Fig. 11.9b the leverarm for the ladder’s weight is 1.5 m, the lever arm for Lancelot’sweight is 1.0 m, and the lever arm for is 4.0 m. The torqueequation for point B is then
n1
ƒsn2
n2 = 980 Nƒs.n2,n1,
aFy = n2 + 1-800 N2 + 1-180 N2 = 0aFx = ƒs + 1-n12 = 0
ms
ƒs … msn2;ƒsn2
ƒs,n2
n1
53.1°Solving for we get We substitute this into the
equation and get (b) The static friction force cannot exceed so the
minimum coefficient of static friction to prevent slipping is
(c) The components of the contact force at the base are thestatic friction force and the normal force so
The magnitude and direction of (Fig. 11.9c) are
EVALUATE: As Fig. 11.9c shows, the contact force is notdirected along the length of the ladder. Can you show that if were directed along the ladder, there would be a net counterclock-wise torque with respect to the top of the ladder, and equilibriumwould be impossible?
As Lancelot climbs higher on the ladder, the lever arm andtorque of his weight about B increase. This increases the values of
and the required friction coefficient , so the ladder ismore and more likely to slip as he climbs (see Problem 11.10). Asimple way to make slipping less likely is to use a larger ladderangle (say, 75° rather than 53.1°). This decreases the lever armswith respect to B of the weights of the ladder and Lancelot andincreases the lever arm of all of which decrease the requiredfriction force.
If we had assumed friction on the wall as well as on the floor,the problem would be impossible to solve by using the equilibriumconditions alone. (Try it!) The difficulty is that it’s no longer ade-quate to treat the body as being perfectly rigid. Another problem ofthis kind is a four-legged table; there’s no way to use the equilib-rium conditions alone to find the force on each separate leg.
n1,
1ms2minƒs,n1,
FS
B
FS
B
u = arctan980 N268 N
= 75°
FB = 21268 N22 + 1980 N22 = 1020 N
FS
B
FS
B ! ƒsın " n2 ≥n ! 1268 N2ın " 1980 N2 ≥nn2,ƒs
FS
B
1ms2min =ƒs
n2= 268 N
980 N= 0.27
msn2,ƒs
ƒs = 268 N.gFx = 0n1 = 268 N.n1,
- 1800 N211.0 m2 + n2102 + ƒs102 = 0
a tB = n114.0 m2 - 1180 N211.5 m2
53.1°
Frictionlesswall
(a) (b)
53.1°
w 5 180 N
w 5 800 N
B
y
x
1.5 m
1.0 m
4.0 m
n1
n2
fs
(c)
u 5 75°
800 N
180 N
B
268 Ny
x
FB 5 1020 N
+ +
11.9 (a) Sir Lancelot pauses a third of the way up the ladder, fearing it will slip. (b) Free-body diagram for the system of Sir Lancelotand the ladder. (c) The contact force at B is the superposition of the normal force and the static friction force.
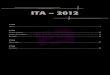
Exemplo O peso da escada da figura é 180 N e o comprimento é 5 m. Está apoiada no chão, onde existe atrito, e numa parede, sem atrito. Uma pessoa, com o peso de 800 N, percorre 1/3 do comprimento da escada. Determine: a) as forças normal e de atrito, na base da escada; b) o menor valor do coeficiente de atrito estático que impede a escada de deslizar; c) o valor e o sentido da força de contacto na base da escada.
350 CHAPTER 11 Equilibrium and Elasticity
Example 11.3 Will the ladder slip?
Sir Lancelot, who weighs 800 N, is assaulting a castle by climbinga uniform ladder that is 5.0 m long and weighs 180 N (Fig. 11.9a).The bottom of the ladder rests on a ledge and leans across the moatin equilibrium against a frictionless, vertical castle wall. The laddermakes an angle of with the horizontal. Lancelot pauses one-third of the way up the ladder. (a) Find the normal and friction forceson the base of the ladder. (b) Find the minimum coefficient of staticfriction needed to prevent slipping at the base. (c) Find the magni-tude and direction of the contact force on the base of the ladder.
SOLUTION
IDENTIFY and SET UP: The ladder–Lancelot system is stationary,so we can use the two conditions for equilibrium to solve part (a).In part (b), we need the relationship among the static friction force,the coefficient of static friction, and the normal force (see Section5.3). In part (c), the contact force is the vector sum of the normaland friction forces acting at the base of the ladder, found in part (a).Figure 11.9b shows the free-body diagram, with x- and y-directionsas shown and with counterclockwise torques taken to be positive.The ladder’s center of gravity is at its geometric center. Lancelot’s800-N weight acts at a point one-third of the way up the ladder.
The wall exerts only a normal force on the top of the ladder.The forces on the base are an upward normal force and a staticfriction force which must point to the right to prevent slipping.The magnitudes and are the target variables in part (a). FromEq. (5.6), these magnitudes are related by the coeffi-cient of static friction is the target variable in part (b).
EXECUTE: (a) From Eqs. (11.6), the first condition for equilibriumgives
These are two equations for the three unknowns and The second equation gives . To obtain a third equa-tion, we use the second condition for equilibrium. We take torquesabout point B, about which and have no torque. The 53.1°angle creates a 3-4-5 right triangle, so from Fig. 11.9b the leverarm for the ladder’s weight is 1.5 m, the lever arm for Lancelot’sweight is 1.0 m, and the lever arm for is 4.0 m. The torqueequation for point B is then
n1
ƒsn2
n2 = 980 Nƒs.n2,n1,
aFy = n2 + 1-800 N2 + 1-180 N2 = 0aFx = ƒs + 1-n12 = 0
ms
ƒs … msn2;ƒsn2
ƒs,n2
n1
53.1°Solving for we get We substitute this into the
equation and get (b) The static friction force cannot exceed so the
minimum coefficient of static friction to prevent slipping is
(c) The components of the contact force at the base are thestatic friction force and the normal force so
The magnitude and direction of (Fig. 11.9c) are
EVALUATE: As Fig. 11.9c shows, the contact force is notdirected along the length of the ladder. Can you show that if were directed along the ladder, there would be a net counterclock-wise torque with respect to the top of the ladder, and equilibriumwould be impossible?
As Lancelot climbs higher on the ladder, the lever arm andtorque of his weight about B increase. This increases the values of
and the required friction coefficient , so the ladder ismore and more likely to slip as he climbs (see Problem 11.10). Asimple way to make slipping less likely is to use a larger ladderangle (say, 75° rather than 53.1°). This decreases the lever armswith respect to B of the weights of the ladder and Lancelot andincreases the lever arm of all of which decrease the requiredfriction force.
If we had assumed friction on the wall as well as on the floor,the problem would be impossible to solve by using the equilibriumconditions alone. (Try it!) The difficulty is that it’s no longer ade-quate to treat the body as being perfectly rigid. Another problem ofthis kind is a four-legged table; there’s no way to use the equilib-rium conditions alone to find the force on each separate leg.
n1,
1ms2minƒs,n1,
FS
B
FS
B
u = arctan980 N268 N
= 75°
FB = 21268 N22 + 1980 N22 = 1020 N
FS
B
FS
B ! ƒsın " n2 ≥n ! 1268 N2ın " 1980 N2 ≥nn2,ƒs
FS
B
1ms2min =ƒs
n2= 268 N
980 N= 0.27
msn2,ƒs
ƒs = 268 N.gFx = 0n1 = 268 N.n1,
- 1800 N211.0 m2 + n2102 + ƒs102 = 0
a tB = n114.0 m2 - 1180 N211.5 m2
53.1°
Frictionlesswall
(a) (b)
53.1°
w 5 180 N
w 5 800 N
B
y
x
1.5 m
1.0 m
4.0 m
n1
n2
fs
(c)
u 5 75°
800 N
180 N
B
268 Ny
x
FB 5 1020 N
+ +
11.9 (a) Sir Lancelot pauses a third of the way up the ladder, fearing it will slip. (b) Free-body diagram for the system of Sir Lancelotand the ladder. (c) The contact force at B is the superposition of the normal force and the static friction force.
a) !F∑ =!0 Fx∑ = fs − n1 = 0
Fy∑ = n2 − (800N)− (180N) = 0 ⇒ n2 = 980N
!τ∑ =!0 τB∑ = (4m)×n1− (1,5m)× (180N)
−(1m)× (800N)+ (0)×n2 + (0)× fs
n1 = 268N
fs = 268N

Exemplo O peso da escada da figura é 180 N e o comprimento é 5 m. Está apoiada no chão, onde existe atrito, e numa parede, sem atrito. Uma pessoa, com o peso de 800 N, percorre 1/3 do comprimento da escada. Determine: a) as forças normal e de atrito, na base da escada; b) o menor valor do coeficiente de atrito estático que impede a escada de deslizar; c) o valor e o sentido da força de contacto na base da escada.
350 CHAPTER 11 Equilibrium and Elasticity
Example 11.3 Will the ladder slip?
Sir Lancelot, who weighs 800 N, is assaulting a castle by climbinga uniform ladder that is 5.0 m long and weighs 180 N (Fig. 11.9a).The bottom of the ladder rests on a ledge and leans across the moatin equilibrium against a frictionless, vertical castle wall. The laddermakes an angle of with the horizontal. Lancelot pauses one-third of the way up the ladder. (a) Find the normal and friction forceson the base of the ladder. (b) Find the minimum coefficient of staticfriction needed to prevent slipping at the base. (c) Find the magni-tude and direction of the contact force on the base of the ladder.
SOLUTION
IDENTIFY and SET UP: The ladder–Lancelot system is stationary,so we can use the two conditions for equilibrium to solve part (a).In part (b), we need the relationship among the static friction force,the coefficient of static friction, and the normal force (see Section5.3). In part (c), the contact force is the vector sum of the normaland friction forces acting at the base of the ladder, found in part (a).Figure 11.9b shows the free-body diagram, with x- and y-directionsas shown and with counterclockwise torques taken to be positive.The ladder’s center of gravity is at its geometric center. Lancelot’s800-N weight acts at a point one-third of the way up the ladder.
The wall exerts only a normal force on the top of the ladder.The forces on the base are an upward normal force and a staticfriction force which must point to the right to prevent slipping.The magnitudes and are the target variables in part (a). FromEq. (5.6), these magnitudes are related by the coeffi-cient of static friction is the target variable in part (b).
EXECUTE: (a) From Eqs. (11.6), the first condition for equilibriumgives
These are two equations for the three unknowns and The second equation gives . To obtain a third equa-tion, we use the second condition for equilibrium. We take torquesabout point B, about which and have no torque. The 53.1°angle creates a 3-4-5 right triangle, so from Fig. 11.9b the leverarm for the ladder’s weight is 1.5 m, the lever arm for Lancelot’sweight is 1.0 m, and the lever arm for is 4.0 m. The torqueequation for point B is then
n1
ƒsn2
n2 = 980 Nƒs.n2,n1,
aFy = n2 + 1-800 N2 + 1-180 N2 = 0aFx = ƒs + 1-n12 = 0
ms
ƒs … msn2;ƒsn2
ƒs,n2
n1
53.1°Solving for we get We substitute this into the
equation and get (b) The static friction force cannot exceed so the
minimum coefficient of static friction to prevent slipping is
(c) The components of the contact force at the base are thestatic friction force and the normal force so
The magnitude and direction of (Fig. 11.9c) are
EVALUATE: As Fig. 11.9c shows, the contact force is notdirected along the length of the ladder. Can you show that if were directed along the ladder, there would be a net counterclock-wise torque with respect to the top of the ladder, and equilibriumwould be impossible?
As Lancelot climbs higher on the ladder, the lever arm andtorque of his weight about B increase. This increases the values of
and the required friction coefficient , so the ladder ismore and more likely to slip as he climbs (see Problem 11.10). Asimple way to make slipping less likely is to use a larger ladderangle (say, 75° rather than 53.1°). This decreases the lever armswith respect to B of the weights of the ladder and Lancelot andincreases the lever arm of all of which decrease the requiredfriction force.
If we had assumed friction on the wall as well as on the floor,the problem would be impossible to solve by using the equilibriumconditions alone. (Try it!) The difficulty is that it’s no longer ade-quate to treat the body as being perfectly rigid. Another problem ofthis kind is a four-legged table; there’s no way to use the equilib-rium conditions alone to find the force on each separate leg.
n1,
1ms2minƒs,n1,
FS
B
FS
B
u = arctan980 N268 N
= 75°
FB = 21268 N22 + 1980 N22 = 1020 N
FS
B
FS
B ! ƒsın " n2 ≥n ! 1268 N2ın " 1980 N2 ≥nn2,ƒs
FS
B
1ms2min =ƒs
n2= 268 N
980 N= 0.27
msn2,ƒs
ƒs = 268 N.gFx = 0n1 = 268 N.n1,
- 1800 N211.0 m2 + n2102 + ƒs102 = 0
a tB = n114.0 m2 - 1180 N211.5 m2
53.1°
Frictionlesswall
(a) (b)
53.1°
w 5 180 N
w 5 800 N
B
y
x
1.5 m
1.0 m
4.0 m
n1
n2
fs
(c)
u 5 75°
800 N
180 N
B
268 Ny
x
FB 5 1020 N
+ +
11.9 (a) Sir Lancelot pauses a third of the way up the ladder, fearing it will slip. (b) Free-body diagram for the system of Sir Lancelotand the ladder. (c) The contact force at B is the superposition of the normal force and the static friction force.
b) fs ≤ µsn2 ⇒ µs,min =fsn2
= 0,27!FB = fs
!ex + n2
!ey = (268N)
!ex + (980N)
!ey
350 CHAPTER 11 Equilibrium and Elasticity
Example 11.3 Will the ladder slip?
Sir Lancelot, who weighs 800 N, is assaulting a castle by climbinga uniform ladder that is 5.0 m long and weighs 180 N (Fig. 11.9a).The bottom of the ladder rests on a ledge and leans across the moatin equilibrium against a frictionless, vertical castle wall. The laddermakes an angle of with the horizontal. Lancelot pauses one-third of the way up the ladder. (a) Find the normal and friction forceson the base of the ladder. (b) Find the minimum coefficient of staticfriction needed to prevent slipping at the base. (c) Find the magni-tude and direction of the contact force on the base of the ladder.
SOLUTION
IDENTIFY and SET UP: The ladder–Lancelot system is stationary,so we can use the two conditions for equilibrium to solve part (a).In part (b), we need the relationship among the static friction force,the coefficient of static friction, and the normal force (see Section5.3). In part (c), the contact force is the vector sum of the normaland friction forces acting at the base of the ladder, found in part (a).Figure 11.9b shows the free-body diagram, with x- and y-directionsas shown and with counterclockwise torques taken to be positive.The ladder’s center of gravity is at its geometric center. Lancelot’s800-N weight acts at a point one-third of the way up the ladder.
The wall exerts only a normal force on the top of the ladder.The forces on the base are an upward normal force and a staticfriction force which must point to the right to prevent slipping.The magnitudes and are the target variables in part (a). FromEq. (5.6), these magnitudes are related by the coeffi-cient of static friction is the target variable in part (b).
EXECUTE: (a) From Eqs. (11.6), the first condition for equilibriumgives
These are two equations for the three unknowns and The second equation gives . To obtain a third equa-tion, we use the second condition for equilibrium. We take torquesabout point B, about which and have no torque. The 53.1°angle creates a 3-4-5 right triangle, so from Fig. 11.9b the leverarm for the ladder’s weight is 1.5 m, the lever arm for Lancelot’sweight is 1.0 m, and the lever arm for is 4.0 m. The torqueequation for point B is then
n1
ƒsn2
n2 = 980 Nƒs.n2,n1,
aFy = n2 + 1-800 N2 + 1-180 N2 = 0aFx = ƒs + 1-n12 = 0
ms
ƒs … msn2;ƒsn2
ƒs,n2
n1
53.1°Solving for we get We substitute this into the
equation and get (b) The static friction force cannot exceed so the
minimum coefficient of static friction to prevent slipping is
(c) The components of the contact force at the base are thestatic friction force and the normal force so
The magnitude and direction of (Fig. 11.9c) are
EVALUATE: As Fig. 11.9c shows, the contact force is notdirected along the length of the ladder. Can you show that if were directed along the ladder, there would be a net counterclock-wise torque with respect to the top of the ladder, and equilibriumwould be impossible?
As Lancelot climbs higher on the ladder, the lever arm andtorque of his weight about B increase. This increases the values of
and the required friction coefficient , so the ladder ismore and more likely to slip as he climbs (see Problem 11.10). Asimple way to make slipping less likely is to use a larger ladderangle (say, 75° rather than 53.1°). This decreases the lever armswith respect to B of the weights of the ladder and Lancelot andincreases the lever arm of all of which decrease the requiredfriction force.
If we had assumed friction on the wall as well as on the floor,the problem would be impossible to solve by using the equilibriumconditions alone. (Try it!) The difficulty is that it’s no longer ade-quate to treat the body as being perfectly rigid. Another problem ofthis kind is a four-legged table; there’s no way to use the equilib-rium conditions alone to find the force on each separate leg.
n1,
1ms2minƒs,n1,
FS
B
FS
B
u = arctan980 N268 N
= 75°
FB = 21268 N22 + 1980 N22 = 1020 N
FS
B
FS
B ! ƒsın " n2 ≥n ! 1268 N2ın " 1980 N2 ≥nn2,ƒs
FS
B
1ms2min =ƒs
n2= 268 N
980 N= 0.27
msn2,ƒs
ƒs = 268 N.gFx = 0n1 = 268 N.n1,
- 1800 N211.0 m2 + n2102 + ƒs102 = 0
a tB = n114.0 m2 - 1180 N211.5 m2
53.1°
Frictionlesswall
(a) (b)
53.1°
w 5 180 N
w 5 800 N
B
y
x
1.5 m
1.0 m
4.0 m
n1
n2
fs
(c)
u 5 75°
800 N
180 N
B
268 Ny
x
FB 5 1020 N
+ +
11.9 (a) Sir Lancelot pauses a third of the way up the ladder, fearing it will slip. (b) Free-body diagram for the system of Sir Lancelotand the ladder. (c) The contact force at B is the superposition of the normal force and the static friction force.c)
FB = (268N)2 + (980N)2 =1020N
θ = arctg 980N268N
= 75º