Embed Size (px)
Citation preview
A Bifurcacao Cuspide e sua Realizacao naMaquina de Zeeman
Otavio Marcal Leandro Gomide
1. Introducao
A teoria de Catastrofes, idealizada por Rene Thom, consiste no es-tudo da estrutura topologica de funcoes diferenciaveis e suas singulari-dades.
Durante seus trabalhos, Thom observou que a informacao qualitativade um fenomeno era um importante objeto de estudo, e ao inves deinvestigar apenas os dados quantitativos, ele comecou a se questionarquais as situacoes em que um mesmo comportamento ocorria.
Com isso, os fundamentos da teoria de Catastrofes e sua interacaocom outros campos da Matematica, Fısica e Biologia, foram publicadosno livro “Stabilite Structurelle et Morphogenese” escrito por Thom.
Com a disseminacao destas novas ideias, muitos outros matematicoscontribuıram para o desenvolvimento desta area, dentre eles, destaca-mos o topologo E.C. Zeeman, que forneceu diversas aplicacoes destateoria e interpretou varias partes do livro de Thom que nao estavamtotalmente claras na obra.
Nos modelos estudados por Thom, observou-se que o comportamentode varios fenomenos nao eram contınuos com respeito as suas condicoesiniciais, ou seja, pequenas mudancas nos parametros iniciais geravamcomportamentos totalmente distintos, e a esta mudanca repentina foidado o nome de catastrofe. Como por exemplo, podemos citar a mu-danca repentina do dioxido de carbono de gelo-seco para gas, a enverga-dura de pontes, o desenvolvimento de ondas de choque e a diferenciacaocelular, dentre varios outros.
Devido as varias aplicacoes, mostrou-se importante o estudo de mo-delos que apresentam tais descontinuidades, e assim originou-se o es-tudo das catastrofes.
Matematicamente, a teoria de Catastrofes tem como objetivo o es-tudo de famılias de funcoes diferenciaveis dependentes de parametros,tambem chamadas de famılias de funcoes potenciais. Algumas famıliasdestacam-se por serem instrumentos de classificacao de catastrofes,dentre elas, podemos citar a famılia que gera a bifurcacao cuspide,que sera explorada na secao 3.
1

2
Vale observar que a sistematizacao desta teoria envolve recursos po-derosos da Analise Diferencial (Preparacao de Malgrange), Topolo-gia Diferencial (Singularidades de aplicacoes diferenciaveis) e da te-oria qualitativa dos sistemas dinamicos (Estabilidade Estrutural e Bi-furcacoes).
O trabalho se desenvolvera da seguinte maneira:Na secao 2 enunciaremos definicoes e resultados necessarios pra se
entender um dos teoremas centrais da teoria das Catastrofes (Teoremade Classificacao de Thom) que nos revela a importancia do estudo dabifurcacao cuspide.
Na secao 3 faremos um estudo detalhado da cuspide, mostraremos ocalculo de sua codimensao e interpretaremos geometricamente o fenomenoque acontece nesta catastrofe.
Para finalizar, na secao 4 mostraremos a realizacao da bifurcacao dacuspide na maquina catastrofica de Zeeman, e investigaremos quais saoas consequencias fısicas geradas por essa catastrofe.
2. Preliminares
Neste trabalho, entenderemos “funcao diferenciavel” por “funcaoC∞”.
Definicao 1. Seja f : Rn → R uma funcao diferenciavel, diremos quep ∈ Rn e um ponto singular se:
df(p) =
(∂f
∂x1(p), · · · , ∂f
∂xn(p)
)= 0.
Definicao 2. f tem uma singularidade nao-degenerada (Morse)em p se a matriz Hessiana abaixo e nao singular:
d2f(p) =
(∂2f
∂xi∂xj(p)
).
Caso f possua apenas singularidades nao-degeneradas, dizemos que fe uma funcao de Morse.
Definicao 3. Duas funcoes f, g : Rn → R sao ditas equivalentes adireita se existe um difeomorfismo H : Rn → R e uma constante realK tais que f(x) = g(H(x)) +K para todo x ∈ Rn.
Definicao 4. Dada uma forma bilinear simetrica f : V ×V → R numespaco vetorial V . Definimos o ındice de f como o numero de au-tovalores negativos (contando multiplicidade) da matriz que representaf .

3
Enunciaremos agora tres teoremas que nos fornece um bom entendi-mento da funcao de Morse e em seguida comentaremos cada um deles:
Teorema 5 (Forma Normal). Seja f : Rn → R uma funcao dife-renciavel tal que 0 e uma singularidade nao-degenerada de f . Entao,existem coordenadas x1, x2, · · · , xn numa vizinhanca de 0 em Rn taisque:
f(x) = f(0)− (x21 + · · ·+ x2k) + (x2k+1 + · · ·+ x2n),
onde o numero k e o ındice da matiz Hessiana em 0 vista como umaforma bilinear simetrica. Em outras palavras, f e equivalente a direitaa g(x) = −(x21 + · · ·+ x2k) + (x2k+1 + · · ·+ x2n).
Teorema 6 (Estabilidade Local). Se f tem uma singularidade nao-degenerada em p com ındice k e g e uma pequena perturbacao de f (nosentido de que g, dg e d2g estao proximas de f, df e d2f , respectiva-mente, numa vizinhanca de p) entao g tambem possui uma singulari-dade nao-degenerada q com ındice k que esta proxima de p.
Mais ainda, as unicas singularidades que sao estaveis (no sentidodescrito acima) sao de Morse.
Teorema 7 (Genericidade). O subconjunto M de C∞(Rn) formadopelas funcoes de Morse e aberto e denso na topologia de Whitney deC∞(Rn).
O Teorema da Forma Normal para funcoes de Morse nos permitedeterminar como e a forma qualitativa da funcao ao redor da singulari-dade nao-degenerada (atraves de uma mudanca de coordenadas). Noteque, tal forma e completamente determinada pelo ındice k da matrizHessiana.
O Teorema da Estabilidade Local fornece um criterio simples paratestar a estabilidade de uma singularidade, basta calcular o determi-nante da matriz Hessiana e verificar se e nulo ou nao. Mais adiante,definiremos de maneira mais tecnica o que significa ser estavel.
De maneira ingenua, podemos interpretar o Teorema de Generici-dade da seguinte forma: Se uma funcao C∞ e escolhida ao acaso, entaoexistem grandes chances de f ser uma funcao de Morse, que e estavele com comportamento local bem determinado (ao redor da singula-
ridade). E importante notar que, o fato de M ser aberto segue doteorema de estabilidade local, a novidade deste teorema e a densidadena topologia de Whitney.
Portanto, pode-se entender que a “maioria”das funcoes C∞ sao estaveis,porem isso nao significa que existe um pequeno numero de funcoes nao-estaveis.
Formalizemos agora o conceito de estabilidade.

4
Definicao 8. Um germe de uma funcao Rn → R em 0 e uma classede equivalencia de C∞(R), onde duas funcoes diferenciaveis f, g saoequivalentes se coincidem numa vizinhanca da origem.
Notacao 1. Denotaremos o espaco dos germes em 0 por C∞0 (Rn).Note que C∞0 (Rn) e um anel com as operacoes soma e multiplicacaoinduzidas das operacoes usuais de funcoes.
Denotaremos um elemento de C∞0 (Rn) por f : (Rn, 0)→ R.
Definicao 9. Um desdobramento a k-parametros de um germef ∈ C∞0 (Rn) e um germe F em C∞0 (Rk × Rn) tal que F (0, x) = f(x)para todo x ∈ Rn.
Denotaremos F (t, x) por Ft(x) e assim podemos interpretar o desdo-bramento como uma famılia a k-parametros de germes Ft em C∞0 (Rn)com F0 = f .
Definicao 10. Sejam Ft, Gs : (Rn, 0) → R dois desdobramentos ak-parametros de f . Dizemos que esses desdobramentos sao equiva-lentes(a direita) se existem uma famılia a k-parametros de difeomor-fismos Hs : (Rn, 0) → Rn, uma mudanca de parametros invertıvel ediferenciavel t = t(s) e um germe K : (Rk, 0)→ R tais que:
(1) H0 = Id e t(0) = 0.(2) Gs(x) = Ft(s)(Hs(x)) +Ks, para todo x ∈ Rn.
Note que, dois desdobramentos F,G sao equivalentes se cada membrode F e equivalente a direita a um membro de G de uma maneira bijetivae suave.
Definicao 11. Um desdobramento a k-parametros Ft : (Rn, 0) → R elocalmente estavel em t = 0 se existem uma vizinhanca U1 × U2 de0 em Rk ×Rn e uma vizinhanca V de Ft na topologia C∞ das funcoesdiferenciaveis U1 × U2 → R tais que:
• Se Gs ∈ V entao Ft e Gs sao equivalentes, isto e, existemdifeomorfismos Hs : U2 → U2 (s ∈ U1), t : U1 → U1 bije-tiva e diferenciavel, e uma funcao suave K : U1 → R tais queGs(x) = Ft(s)(Hs(x)) +Ks.
Vamos agora definir a codimensao de um germe.
Definicao 12. Seja f ∈ C∞0 (Rn), defina o conjunto Of de todos osgermes equivalentes a direita a f , isto e:
Of = {g ∈ C∞0 (Rn); g = f ◦ h+K para uma constante K e umdifeomorfismo h}.
Assim Of e uma subvariedade de C∞0 (Rn), e portanto, podemosdefinir:

5
Definicao 13. Definimos a codimensao de um germe f ∈ C∞0 (Rn)por:
codimf = codimOf = dimRC∞0 (Rn)
TfOf,
onde TfOf e o espaco tangente de Of em f .
Para que a definicao acima possa ser utilizada de maneira pratica,devemos calcular o espaco TfOf :
Seja c uma curva em Of tal que c(0) = f , entao c′(0) ∈ TfOf . Pela
definicao de Of , temos que c e da forma c(t) = f ◦ ht +Kt e podemosassumir que h0 = Id.
Escreva ht(x) = (h1t (x), · · · , hnt (x)) em coordenadas x1, · · · , xn deRn no 0, usando a regra da cadeia, temos que:
dc
dt(0) =
n∑i=1
∂f
∂xi(x)
∂hi0∂t
(x) +K′
0,
E portanto, podemos escrever dcdt
(0) como:
a(x) = a1(x)∂f
∂x1(x) + · · ·+ an(x)
∂f
∂xn(x) +K
Alem disso, dada uma funcao na forma de a, podemos encontrar umacurva c em Of cuja derivada em 0 e a. Portanto:
TfOf ={a ∈ C∞0 (Rn); a = a1
∂f∂x1
+ · · ·+ an∂f∂xn
+K, ai ∈ C∞0 (Rn), K ∈ R}
Notacao 2. Denotamos o espaco TfOf por 〈∂f∂x〉, e o subespaco de
TfOf onde K = 0 e denotado por 〈∂f∂x〉.
Com isso, temos que:
codimf = dimRC∞0 (Rn)
〈∂f∂x〉
Observacao 14. Temos as seguintes propriedades:
(1) O subespaco 〈∂f∂x〉 e um ideal de C∞0 (Rn) pois se a ∈ 〈∂f
∂x〉 e
g ∈ C∞0 (Rn), entao ga ∈ 〈∂f∂x〉.
(2) Se g ∈ C∞0 (Rn) e g(0) 6= 0 entao 1g
tambem esta em C∞0 (Rn)
pois e uma funcao C∞ definida numa vizinhanca do 0.(3) Como 〈∂f
∂x〉 e um ideal, se f e nao singular entao g = ∂f
∂xi(0) 6= 0
para algum i e portanto 1 = g(
1g
)∈ 〈∂f
∂x〉 e assim 〈∂f
∂x〉 =
C∞0 (Rn).

6
(4) O ideal 〈∂f∂x〉 independe das coordenadas escolhidas. De fato,
sejam y1, · · · , yn outras coordenadas de Rn, e assim cada yi euma funcao C∞ de x, i.e., yi = yi(x), pela regra da cadeia,temos que:
∂f∂xi
(y) = ∂f∂yi
(y(x))∂y1∂xi
(x) + · · ·+ ∂f∂yn
(y(x))∂yn∂xi
(x)
= a1(y) ∂f∂yi
(y) + · · ·+ an(y) ∂f∂yn
(y)
Logo, 〈∂f∂x〉 ⊂ 〈∂f
∂y〉. A inclusao reversa pode ser obtida pela
regra da cadeia, porem considerando a mudanca de coordenadasinversa x = x(y).
Desenvolveremos agora algumas ferramentas que nos permite fazero calculo de codimensoes:
Teorema 15. Seja f : (Rn, 0) → R um germe, e seja jkf a expansaode Taylor de ordem k de f em 0. Seja {p1, · · · , pr} uma base parao espaco dos polinomios homogeneos de ordem k + 1. Entao, existemgermes a1, · · · , ar em C∞0 (Rn) tais que:
f(x) = jkf(x) + a1(x)p1(x) + · · ·+ ar(x)pr(x),
para x numa vizinhanca da origem.
Demonstracao. Mostraremos o resultado quando jkf(x) ≡ 0, caso issonao ocorra, aplique o teorema para h = f − jkf (jkh ≡ 0).
Suponha h(0) = 0, entao existem funcoes C∞, bi(x), tais que g(x) =x1b1(x) + · · · + xnbn(x). De fato, seja q(s) = g(sx1, · · · , sxn) e noteque:
g(x) = g(x)− g(0)
=∫ 1
0dqdt
(s)ds
=∫ 1
0x1
∂g∂x1
(sx) + · · ·+ xn∂g∂xn
(sx)ds
= x1b1(x) + · · ·+ xnbn(x)
Com isso, faremos a prova por inducao em k.Para k = 0, assuma que j0f(0) = f(0) = 0 e seja p1, · · · , pn uma
base dos polinomios homogeneos de grau 1. Como vimos anteriormente,podemos escrever f(x) = x1b1(x) + · · ·+ xnbn(x). Como cada xi e umpolinomio homogeneo de grau 1, podemos escreve-lo como combinacaolinear (coeficientes escalares) dos pi’s e portanto f(x) = p1(x)b1(x) +· · · pn(x)bn(x), onde cada ai e uma funcao suave.
Assuma valido para k − 1 e assuma que jkf = 0. Sejam p1, · · · , pruma base para o espaco dos polinomios homogeneos de ordem k + 1
7
e q1, · · · , qs uma base para o espaco dos polinomios homogeneos deordem k.
Como jk−1f = 0, pela hipotese indutiva, temos que f(x) = c1(x)q1(x)+· · ·+ cs(x)ps(x). Note que a serie de Taylor de f comeca nos termos deordem k + 1 e cada qi tem ordem k. Entao cada ci tem que ter termoscom ordem pelo menos 1, ou terıamos termos de ordem k na serie def .
Assim ci(0) = 0 para todo i, e pela observacao inicial, cada c1 podeser escrito como combinacao de xj’s. Como cada xjqi e um polinomiohomogeneo de grau k + 1, podemos reescreve-los como combinacao li-near dos pi’s e portanto f(x) = a1(x)p1(x)+· · ·+ar(x)pr(x), concluindoa prova. �
Observacao 16. Seja f : (Rn, 0) → R tal que 0 e uma singularidadenao-degenerada, entao pelo teorema da forma normal para funcoes deMorse, temos que f(x) = f(0) ± x21 ± · · · ± x2n, e portanto 〈∂f
∂x〉 =
〈x1, · · · , xn〉.Agora, se g ∈ C∞0 (Rn), entao considere h = g−g(0), assim h(0) = 0
e pelo inıcio da demonstracao acima, temos que h = x1b1 + · · ·+ xnbncom bi funcao C∞. Logo h ∈ 〈∂f
∂x〉 e portanto g ∈ 〈∂f
∂x〉.
Deste modo, 〈∂f∂x〉 = C∞0 (Rn) e portanto codimf = 0. Pelo Teorema
de Estabilidade Local, podemos concluir que se f e localmente estavelentao codimf = 0, porem a recıproca tambem e valida. Assim, po-demos interpretar a codimensao de uma funcao f como a medida dainstabilidade de f .
Definicao 17. Dizemos que f tem codimensao finita se codimf <∞, e codimensao infinita, caso contrario.
Veremos agora nocoes de estabilidade para desdobramentos:
Definicao 18. Sejam V um espaco vetorial, W uma variedade em Ve F : Rk → V uma funcao tal que F (0) = x ∈ W . Dizemos que F temuma interseccao transversal com W em 0 se V = TxW+(dF )0(Rk).Neste caso, denotamos F t W em 0.
Observacao 19. Se F t W em 0 entao codimW ≤ k. De fato, temosque:
dim(TxW + (dF )0(Rk)
)≤ dimW + k,
Mas, pela transversalidade, segue que dimV ≤ dim(TxW + (dF )0(Rk)
)e assim:
codimW = dimV − dimW ≤ k.

8
Teorema 20 (Estabilidade Local de Desdobramentos). Seja Ft umdesdobramento para um germe f = F0. Entao, Ft e um desdobramentolocalmente estavel se, e so se, F t Of em 0.
Note que um desdobramento Ft pode ser visto como uma funcaoF : Rk → C∞0 (Rn), definida por F (t) = Ft. Logo, faz sentido verificarquando F t Of em 0.
O teorema acima e um dos resultados mais importantes da teoriade Catastrofes e e consequencia do Teorema de Transversalidade deThom, que e um poderoso resultado da topologia diferencial. Vejamosagora algumas de suas consequencias:
Corolario 21. Existe um desdobramento estavel F de f se, e so se, ftem codimensao finita.
Demonstracao. Basta aplicar o teorema de estabilidade local de desdo-bramentos 20, juntamente com a observacao 19. �
Teorema 22 (Forma Normal para Desdobramentos). Seja f um germecom codimensao k. Sejam p1(x), · · · , pk(x) em C∞0 (Rn) germes, tais
que suas projecoes π(p1(x)), · · · , π(pk(x)) formam uma base deC∞
0 (Rn)
〈 ∂f∂x〉
,
entao:Ft(x) = f(x) + t1p1 + · · ·+ tkpk(x)
e um desdobramento estavel de f .
Demonstracao. Observe que p1(x), · · · , pk(x) projeta-se em uma base
deC∞
0 (Rn)
〈 ∂f∂x〉
se, e so se, o plano gerado por p1(x), · · · , pk(x) em C∞0 (Rn)
e transversal a 〈∂f∂x〉 = TfOf .
Portanto, todos os germes da forma t1p1 + · · ·+ tkpk(x) sao transver-sais a Of . Desta forma, pelo teorema 20, segue que Ft e estavel. �
Com essas ferramentas, somos capazes de calcular a codimensao deuma funcao f , e caso seja finita, podemos encontrar uma base do
espacoC∞
0 (Rn)
〈 ∂f∂x〉
e assim, determinar um desdobramento estavel de f .
Deste modo, conheceremos todas as funcoes que estao proximas de f .Note que o numero de parametros do desdobramento estavel coincidecom a codimensao de f .
Teorema 23. Seja Ft um desdobramento estavel de um germe f emC∞0 (Rn) com k parametros. Seja Gs outro desdobramento de f comm parametros. Entao existe uma troca suave de parametros t = t(s),uma famılia a m parametros de difeomorfismos Hs : (Rn, 0) → Rn eum conjunto a m-parametros de constantes Ks tais que:
Gs(x) = Ft(s)(Hs(x)) +Ks.
9
Note que H e K dependem suavemente do parametro s.
O teorema acima nos diz que, qualquer desdobramento pode terseu numero de parametros reduzido ao de um desdobramento estavel.Logo, sempre podemos reduzir o numero de parametros de um desdo-bramento para a codimensao da funcao.
Ate agora, obtemos metodos que nos mostram como encontrar umdesdobramento estavel de f . A seguir, estabeleceremos um criteriopara saber quando um desdobramento e estavel.
Na realidade, ja sabemos a resposta dessa pergunta, o teorema de es-tabilidade 20 nos diz que um desdobramento F e estavel se (dF )0(Rk)+TfOf = C∞0 (Rn), porem resta interpretar o que isso significa.
Seja ti(s) o k-vetor cuja i-esima coordenada e s e as outras sao nulas,
entao Fti(s) e uma curva em C∞0 (Rn) edFti(s)
ds|s=0 e um vetor tangente em
(dF )0(Rk). Usando a regra da cadeia, temos que esse vetor e ∂F∂ti
(x)|t=0.
E claro que esses k vetores geram (dF )0(Rk), assim, obtemos:
Teorema 24. Dado um desdobramento a k-parametros Ft de f = F0.Entao F e estavel se, e so se, ∂F
∂t1(0, x), · · · , ∂F
∂tk(0, x) se projeta num
conjunto gerador do espacoC∞
0 (Rn)
〈 ∂f∂x〉
.
Desta forma, temos que existem desdobramentos estaveis cujo numerode parametros e maior do que a codimensao da funcao, isso nos leva aseguinte definicao:
Definicao 25. Um desdobramento Ft de f = F0 e dito universal seFt e um desdobramento estavel com o menor numero de parametros,isto e, com codimf parametros.
Com toda a teoria desenvolvida ate aqui, estamos aptos a enunciaro teorema de classificacao de Thom:
Teorema 26 (As Sete Catastrofes Elementares de Thom). Existemexatamente sete desdobramentos estaveis universais com numero deparametros ≤ 4 e sao dados pela tabela abaixo. Assim, qualquer germef em 0 de codimensao ≤ 4 e equivalente a direita a um dos germes (amenos de sinal) da tabela.
Assim, a cuspide representa todos os germes de codimensao 2, eportanto e um interessante objeto de estudo. Na proxima secao, estu-daremos como e o seu comportamento topologico.

10
Germe Codim Desdobramento Nomex2 0 x2 Morsex3 1 x3 + t1x Dobrax4 2 x4 + t1x+ t2x Cuspidex5 3 x5 + t1x
3 + t2x2 + t3x Rabo de Andorinha
x6 4 x6 + t1x4 + t2x
4 + t3x2 + t4x Borboleta
x3 + y3 3 x3 + y3 + t1xy + t2x+ t3y Umbılico Hiperbolicox3 − 3xy2 3 x3 − 3xy2 + t1(x
2 + y2) + t2x+ t3y Umbılico Elıpticox2y + y4 4 x2y + y4 + t1x
2 + t2y2 + t3x+ t4y Umbılico Parabolico
Tabela 1. As Sete Catastrofes de Thom
3. A Bifurcacao Cuspide
3.1. Codimensao. Utilizando os metodos da secao 2, calcularemos acodimensao e encontraremos um desdobramento estavel universal dogerme f(x) = x4 que gera a bifurcacao cuspide.
Nesse caso, dfdx
= 4x3, logo 〈∂f∂x〉 = 〈x3〉.
Seja m um germe em C∞0 (R), entao pelo teorema 15 com k = 1,temos que existem constantes m0,m1 ∈ R e uma funcao suave a(x)tais que:
(1) m(x) = m0 +m1x+ a(x)x2,
pois p(x) = x2 e base para os polinomios homogeneos de grau 2 em R,e j1m = m0 +m1x.
Agora, aplicando novamente o teorema 15 para a com k = 0, temosque existe uma constante m2 ∈ R e uma funcao b(x) tais que:
(2) a(x) = m3 + b(x)x,
pois q(x) = x e base para os polinomios homogeneos de grau 1 em R,e j0m = m2.
Substituindo 2 em 1, temos que:
(3) m(x) = m0 +m1x+m1x2 + b(x)x3
Agora, b(x)x3 + m0 esta em 〈∂f∂x〉 e portanto, no espaco
C∞0 (R)
〈 ∂f∂x〉
, as
classes de equivalencia [m] e [m1x+m2x2] coincidem.
Como [m] = m1[x] + m2[x2], m1,m2 ∈ R, para cada m ∈ C∞0 (R),
temos que [x], [x2] geram o espaco vetorial realC∞
0 (R)
〈 ∂f∂x〉
, e portanto:
codimf = dimRC∞0 (R)
〈∂f∂x〉≤ 2.

11
Mostremos agora que [x], [x2] e uma base. De fato, sejam A,B ∈ Re suponha que A[x]+B[x2] = 0. Mas isso significa que [Ax+Bx2] = 0,e pela relacao de equivalencia, existem uma constante K e um germeg em C∞0 (R) tais que:
Ax+Bx2 = K + g(x)x3
Avaliando a expressao acima, e claro que K = 0. Como nao existemtermos de ordem ≤ 2 na serie de Taylor de g(x)x3 e no lado esquerdotemos apenas termos de ordem ≤ 2, comparando graus, temos queA = B = 0.
Portanto o conjunto {[x], [x2]} e linearmente independente e assim
constitui uma base deC∞
0 (R)
〈 ∂f∂x〉
.
Logo,
codimf = 2.
Note que os germes p1(x) = x e p2(x) = −x2 se projetam numa base
{[x], [−x2]} deC∞
0 (R)
〈 ∂f∂x〉
. Pelo teorema 22 segue que:
(4) Fα,β(x) = x4 − βx2 + αx,
e um desdobramento estavel universal para f .
3.2. Interpretacao Geometrica. Considere o desdobramento uni-versal Fα,β(x) = x4−βx2 +αx do germe f(x) = x4, vamos calcular suavariedade de singularidades M, tambem conhecida como variedadecatastrofe:
Mf =
{(α, β, x);
∂Fα,β(x)
∂x= 0
}Neste caso,
∂Fα,β(x)
∂x= 4x3 − 2βx+ α
Logo,
Mf ={
(α, β, x); 4x3 − 2βx+ α = 0}
Vamos esbocar essa superfıcie:
(1) Se β = 0, temos que α = −4x3. Assim temos o seguinte grafico:
12
x
α
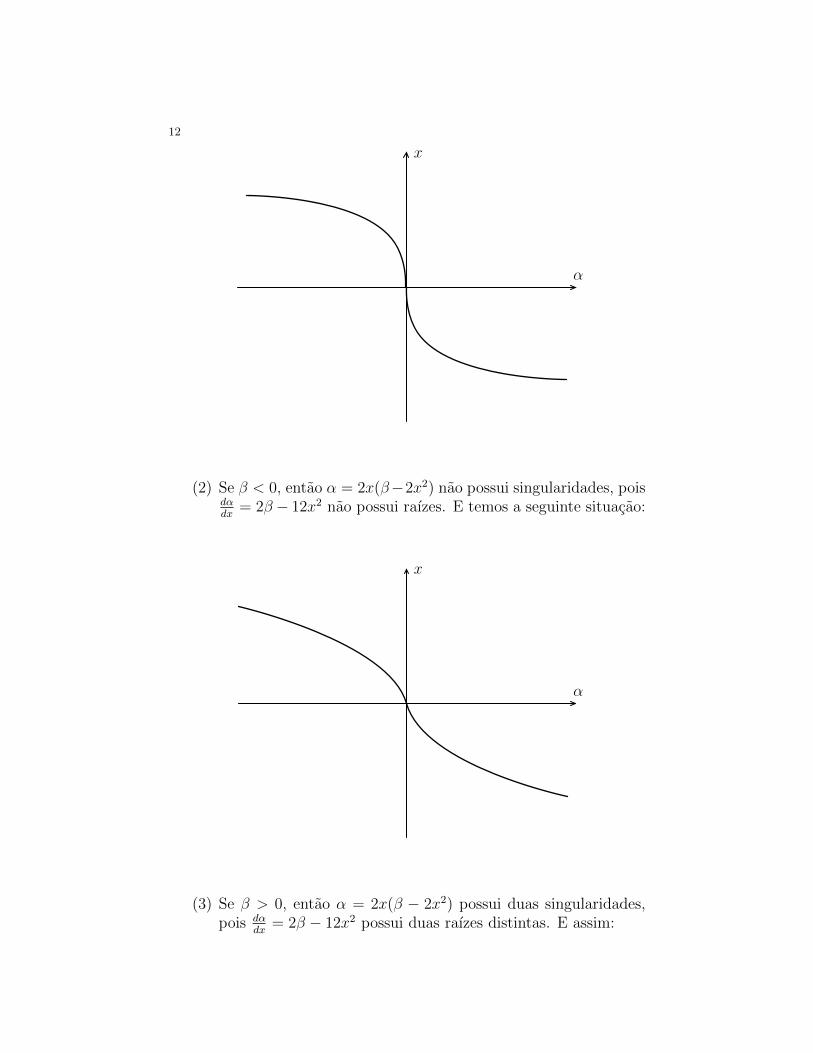
(2) Se β < 0, entao α = 2x(β−2x2) nao possui singularidades, poisdαdx
= 2β − 12x2 nao possui raızes. E temos a seguinte situacao:
x
α
(3) Se β > 0, entao α = 2x(β − 2x2) possui duas singularidades,pois dα
dx= 2β − 12x2 possui duas raızes distintas. E assim:
13
x
α
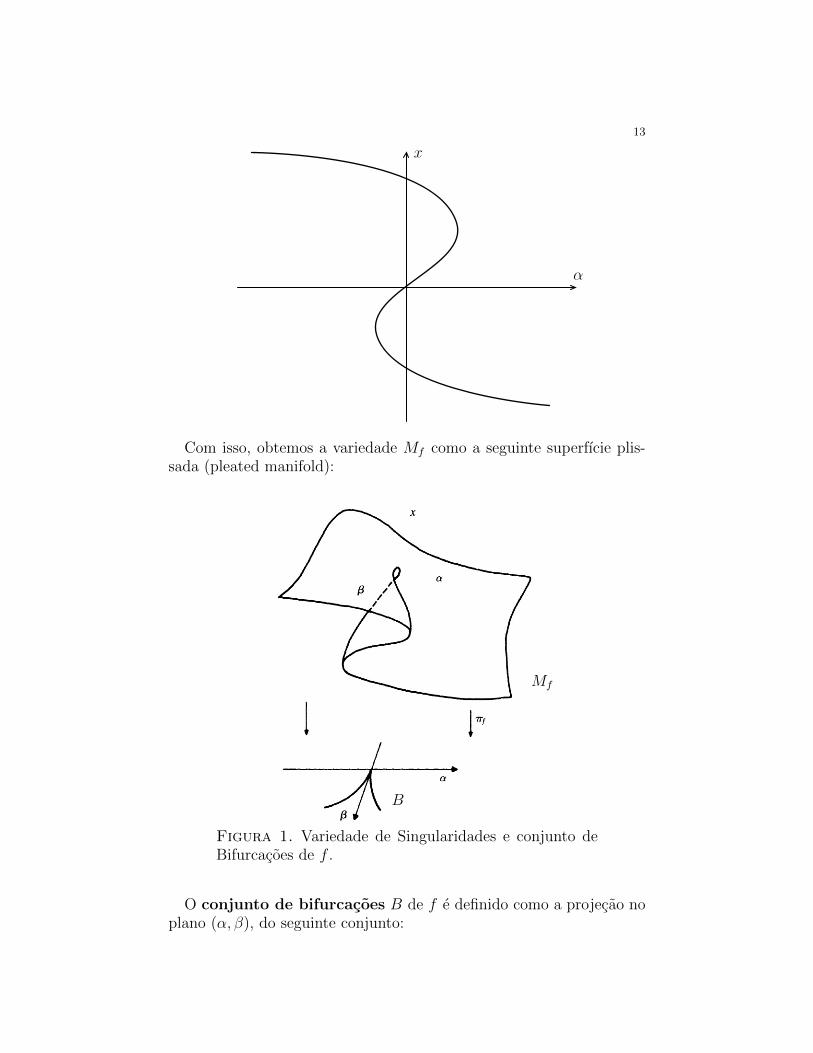
Com isso, obtemos a variedade Mf como a seguinte superfıcie plis-sada (pleated manifold):
Mf
B
Figura 1. Variedade de Singularidades e conjunto deBifurcacoes de f .
O conjunto de bifurcacoes B de f e definido como a projecao noplano (α, β), do seguinte conjunto:

14
Df =
{(α, β, x) ∈Mf ;
∂2Fα,β(x)
∂x2= 0
}.
Neste caso, o conjunto Df e uma curva do tipo dobra, pois:
∂2Fα,β(x)
∂x2= 12x2 − 2β
Assim,Df =
{(α, β, x) ∈Mf ; 12x2 − 2β = 0
}.
Vamos parametrizar o conjunto Df :
(1) 12x2 − 2β = 0 =⇒ β = 6x2.(2) α = 2βx− 4x3 =⇒ α = 12x3 − 4x3 = 8x3
Assim:
Df ={
(8ξ3, 6ξ2, ξ); ξ ∈ R}.
Para encontrar a projecao desta curva no plano (α, β), basta eliminar
ξ das expressoes de α e β:
(1) α = 8ξ3, β = 6ξ2 =⇒ ξ3 = α8, ξ2 = β
6.
(2) Desta forma:(α8
)2=(β6
)3.
(3) Portanto: 27α2 = 8β3.
Logo, temos a cuspide:
B = πf (Df ) ={
(α, β); 27α2 = 8β3}
Assim, obtemos o seguinte diagrama de bifurcacao:
β
α
Figura 2. Diagrama de Bifurcacao de f .
15
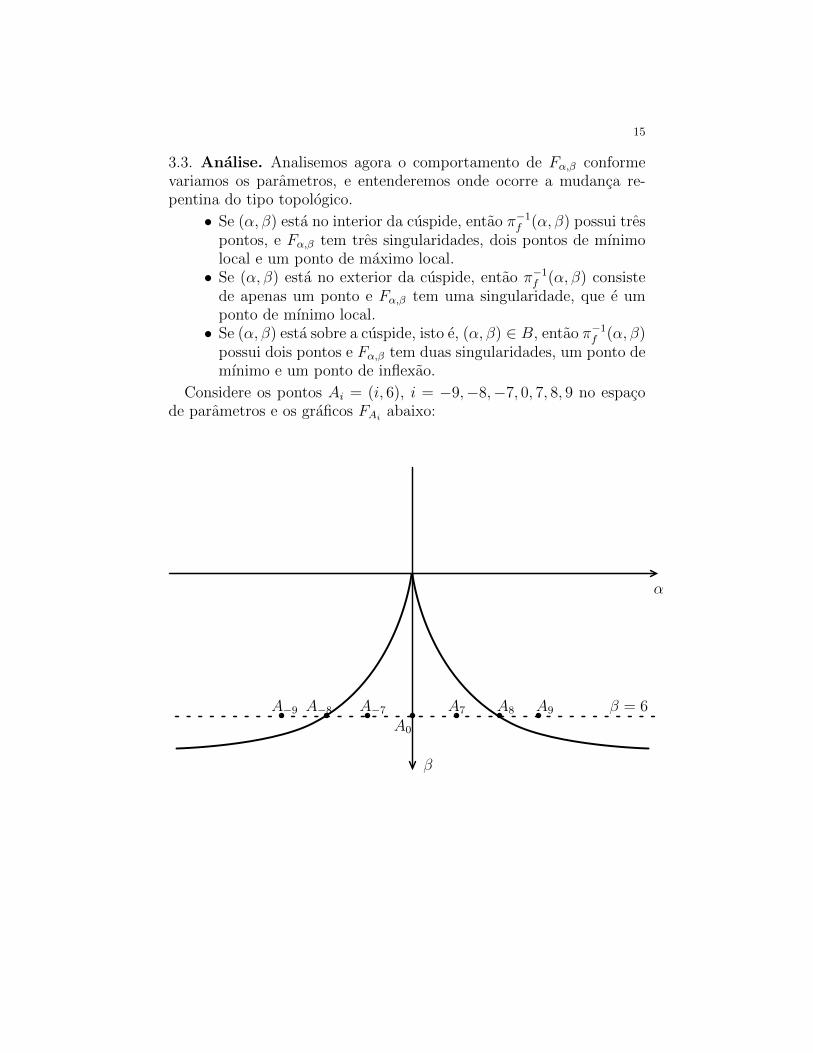
3.3. Analise. Analisemos agora o comportamento de Fα,β conformevariamos os parametros, e entenderemos onde ocorre a mudanca re-pentina do tipo topologico.
• Se (α, β) esta no interior da cuspide, entao π−1f (α, β) possui trespontos, e Fα,β tem tres singularidades, dois pontos de mınimolocal e um ponto de maximo local.• Se (α, β) esta no exterior da cuspide, entao π−1f (α, β) consiste
de apenas um ponto e Fα,β tem uma singularidade, que e umponto de mınimo local.• Se (α, β) esta sobre a cuspide, isto e, (α, β) ∈ B, entao π−1f (α, β)
possui dois pontos e Fα,β tem duas singularidades, um ponto demınimo e um ponto de inflexao.
Considere os pontos Ai = (i, 6), i = −9,−8,−7, 0, 7, 8, 9 no espacode parametros e os graficos FAi
abaixo:
β
α
A−9 A−8 A−7A0
A7 A8 A9 β = 6
16
A−9 A−8 A−7
A0
A7 A8 A9
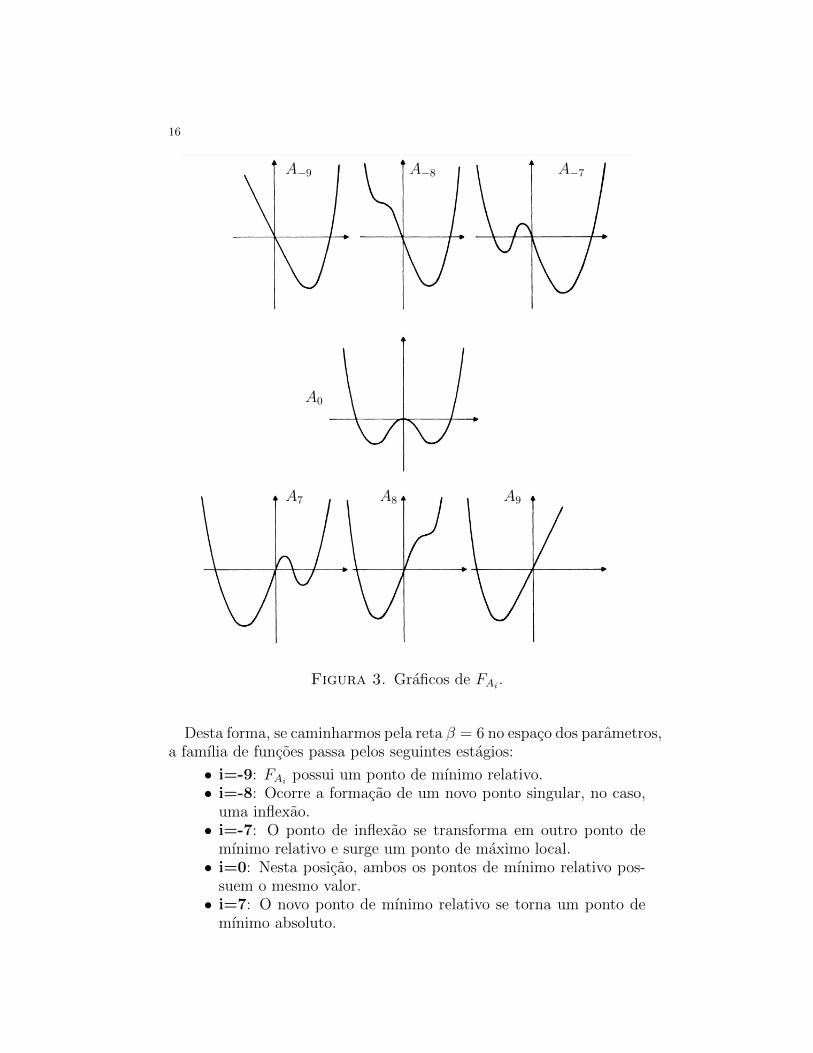
Figura 3. Graficos de FAi.
Desta forma, se caminharmos pela reta β = 6 no espaco dos parametros,a famılia de funcoes passa pelos seguintes estagios:
• i=-9: FAipossui um ponto de mınimo relativo.
• i=-8: Ocorre a formacao de um novo ponto singular, no caso,uma inflexao.• i=-7: O ponto de inflexao se transforma em outro ponto de
mınimo relativo e surge um ponto de maximo local.• i=0: Nesta posicao, ambos os pontos de mınimo relativo pos-
suem o mesmo valor.• i=7: O novo ponto de mınimo relativo se torna um ponto de
mınimo absoluto.
17
• i=8: O primeiro ponto de mınimo relativo choca-se com o pontode maximo e desaparece, transformando-se em uma inflexao.• i=9: Retornamos para apenas um ponto de mınimo relativo.
Note que, a mudanca instantanea ocorre quando um ponto de mınimoe um ponto de maximo se chocam, transformando se num ponto deinflexao, e quando um ponto de inflexao desaparece, originando ummaximo e um mınimo.
Portanto, temos entendido por completo todas as funcoes que estao“proximas”de f(x) = x4 e sao topologicamente diferentes desta.
Observacao 27. O desdobramento estavel universal de f(x) = −x4 eFα,β(x) = −x4− βx2 +αx, e e conhecido como a catastrofe cuspidedual.
O desenvolvimento dessa catastrofe se da do mesmo modo que acuspide, porem trocando todo ponto de mınimo por ponto de maximo evice versa.
Embora a sua analise possa ser deduzida da cuspide, observe que acuspide dual tem um comportamento qualitativo totalmente diferente dacuspide, por conta das trocas entre maximo e mınimo. Nesse sentido,tais catastrofes sao distintas.
4. Aplicacao: A Maquina Catastrofica de Zeeman
Nesta secao, temos o objetivo de descrever fisicamente a maquinacatastrofica de Zeeman e entender seu comportamento do ponto devista da Teoria de Catastrofes.
A maquina foi estudada por Zeeman em 1969, e consiste de umdispositivo mecanico que representa a catastrofe cuspide.
4.1. Construcao. Podemos construir a maquina da seguinte forma:Considere um disco de raio r livre para girar em torno da origem 0,
e dois pedacos de elastico BA e BX de comprimento p (nao esticados),que estao pivoteados num ponto B da fronteira da roda.
Fixe o ponto A em (−a, 0) e considere X = (x, y) um ponto variavelno plano. Ao esquema abaixo, e dado o nome de Maquina Ca-tastrofica de Zeeman:

18
A
B
X
0
rθ
Figura 4. Esquema de construcao da Maquina de Zeeman.
4.2. Equacionamento. Considere r = 12, p = 1, BA = 2, entao a
energia potencial do sistema e dada por:
V (u, v, θ) =
(√174− 2 cos(θ)− 1
)2
+
(√u2 + v2 + 1
4+ u cos(θ)− v sin(θ)− 1
)2
Mas, em uma vizinhanca da origem, existem difeomorfismos x, αe β e uma funcao suave w, tais que, numa vizinhanca da origem, opotencial tem a forma funcional:
V (u, v, θ) = F (x(θ, u, v), α(u, v), β(u, v)) + w(u, v)
Onde a funcao F e dada por:
F (x, α, β) = x4 − αx2 + βx
A expressao pode ser encontrada em [1] (faca a = 0).Mas F e o desdobramento estavel universal da cuspide, e portanto
o estudo dos potenciais em funcao do ponto variavel pode ser feitoatraves do estudo da secao anterior.
Desta forma, temos que a maquina de Zeeman representa a bi-furcacao cuspide.
Note que, as mudancas feitas acima valem para uma vizinhanca daorigem, e devido a simetria do problema, a regiao de bifurcacao e de-limitada por 4 cuspides conectadas, porem as cuspides, superior e in-ferior, sao duais (no sentido explicado anteriormente), e isso ocorredevido a troca de maximos por mınimos conforme a posicao do ponto.
19
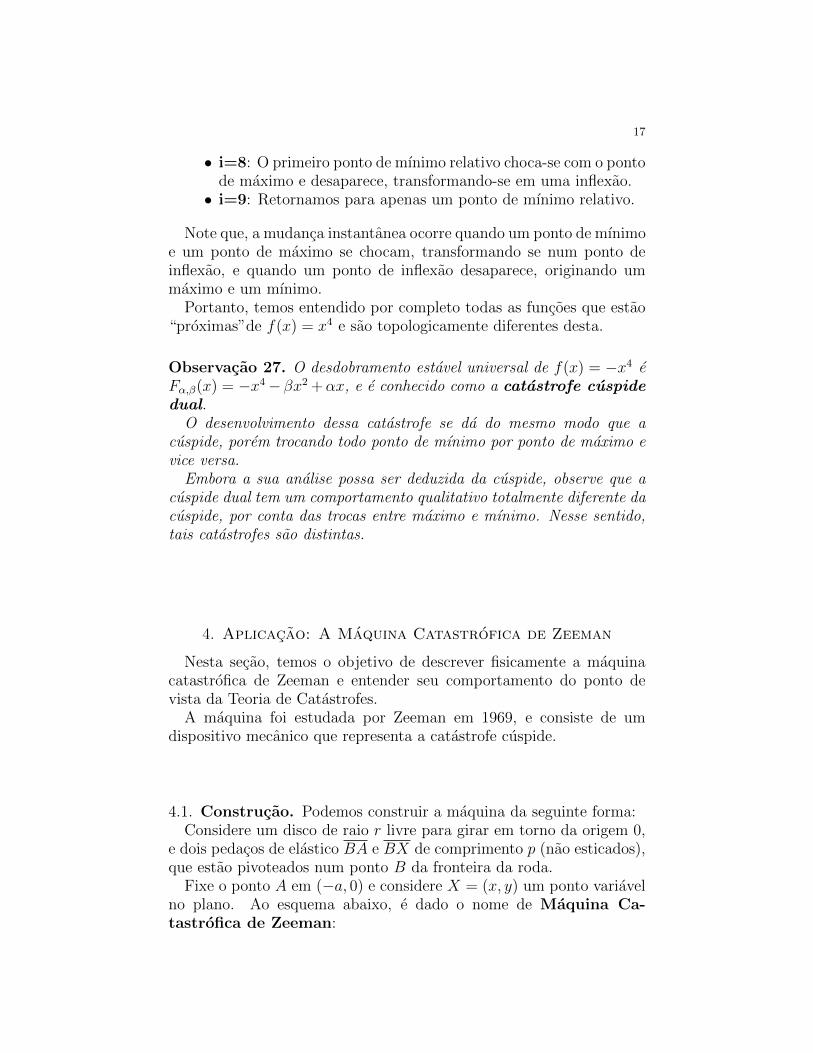
4.3. Interpretacao do fenomeno fısico atraves da Cuspide. Ve-remos agora, quais sao os fenomenos que ocorrem no sistema conformevariamos o ponto no plano e passamos pela regiao de bifurcacao.
Para exemplificar, utilizaremos os resultados do artigo [3] , no qual osautores realizaram experimentos praticos para uma determinada mon-tagem da maquina de Zeeman.
Observe abaixo o conjunto de bifurcacao:
Figura 5. Conjunto de Bifurcacao da Maquina de Zeeman.
Temos os seguintes fenomenos:
(1) Ocorrencia de saltos repentinosPara certas posicoes do ponto, um movimento infinitesimal pro-duzira uma mudanca repentina na posicao da roda.
20
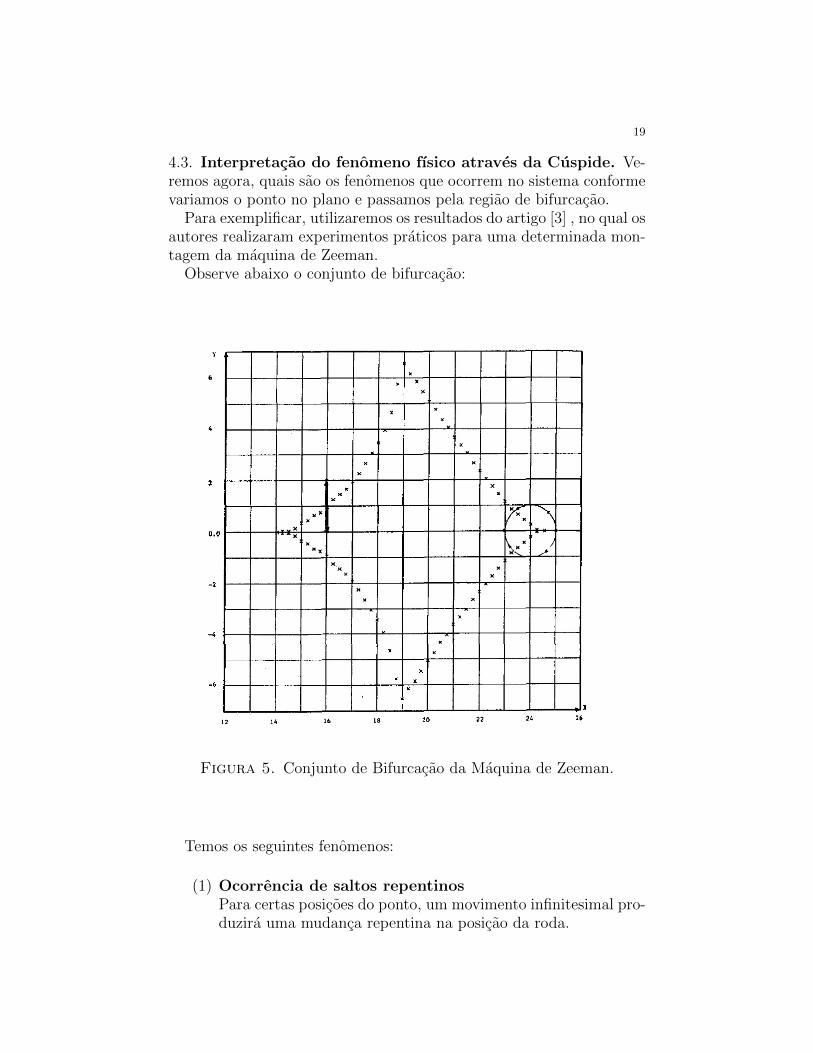
Figura 6. Ocorrencia de um salto.
O grafico na figura (6) mostra, que no inıcio θ = 3.882 equando o ponto final X e movido do ponto (16, 0) para (16, 2),observamos um salto na roda quando t e aproximadamente 64s.
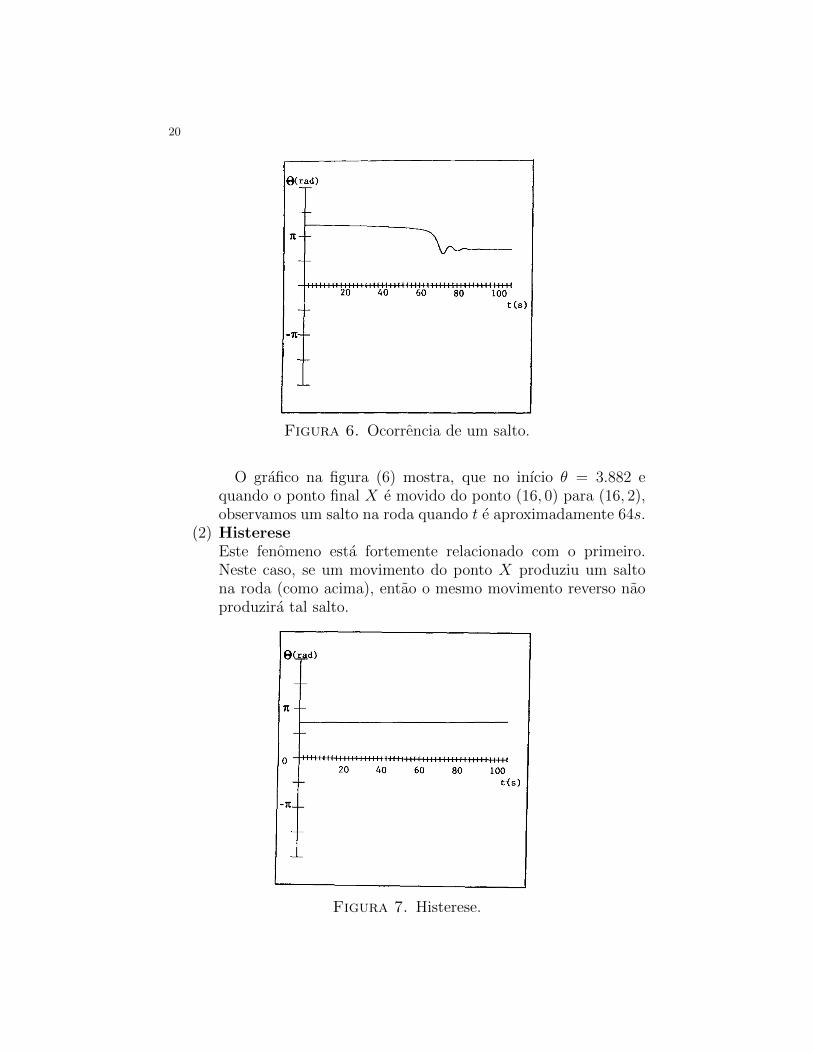
(2) HistereseEste fenomeno esta fortemente relacionado com o primeiro.Neste caso, se um movimento do ponto X produziu um saltona roda (como acima), entao o mesmo movimento reverso naoproduzira tal salto.
Figura 7. Histerese.
21
Observe na figura (7) que a roda quase nao muda de θ = 2.340quando movemos o ponto X de (16, 2) para (16, 0).
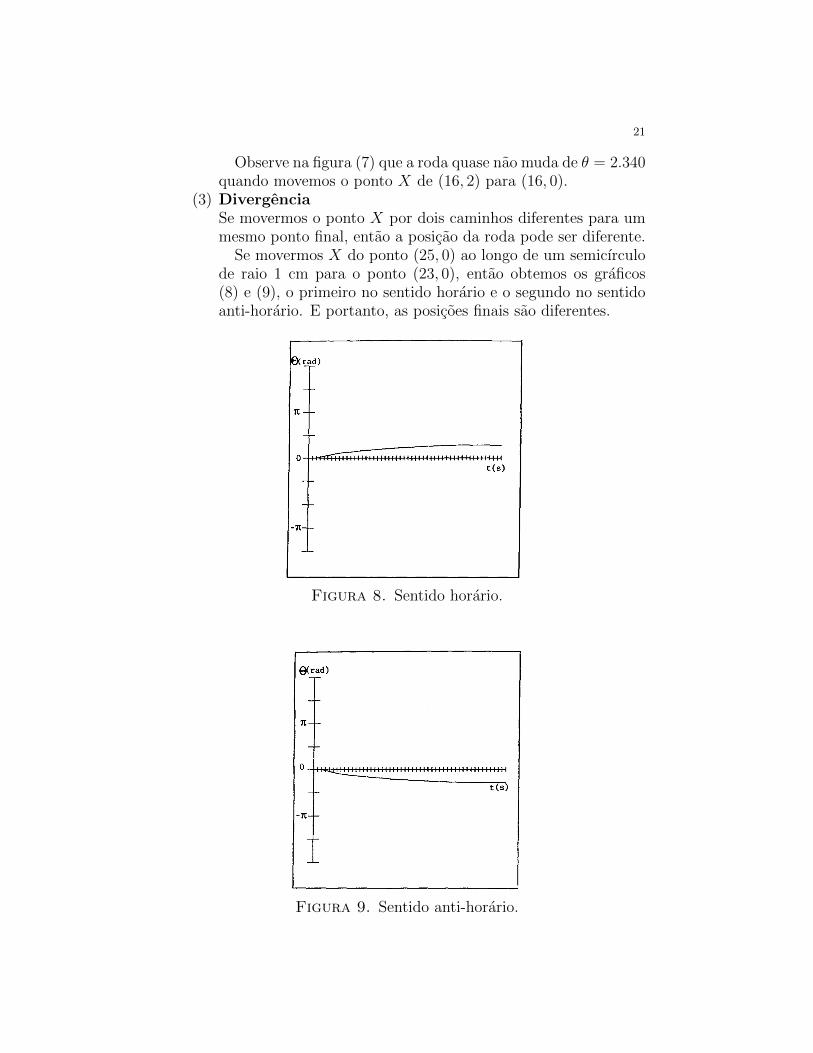
(3) DivergenciaSe movermos o ponto X por dois caminhos diferentes para ummesmo ponto final, entao a posicao da roda pode ser diferente.
Se movermos X do ponto (25, 0) ao longo de um semicırculode raio 1 cm para o ponto (23, 0), entao obtemos os graficos(8) e (9), o primeiro no sentido horario e o segundo no sentidoanti-horario. E portanto, as posicoes finais sao diferentes.
Figura 8. Sentido horario.
Figura 9. Sentido anti-horario.
22
(4) BimodalidadeEm todos os pontos de dentro da regiao formada pelas cuspides,temos que a funcao potencial tem dois pontos crıticos (de mınimoou maximo), e portanto existem dois possıveis estados estaveisque a roda pode assumir.
(5) Movimento quase-estaticoFora dos pontos da regiao cuspidal, movimentos infinitesimaisno ponto X geram mudancas ınfimas na posicao da roda.
Note que, a propriedade 1 ocorre pela mudanca de comportamentodo potencial quando o ponto passa pelo conjunto de bifurcacao.
A propriedade 2 ocorre pois, em um caminho temos a formacao dedois pontos crıticos porem, no reverso temos o desaparecimento dospontos crıticos num ponto de inflexao, ou vice versa.
A propriedade 3 acontece pois em um caso o caminho pode passarpela cuspide e no outro pela cuspide dual, originando posicoes distintasda roda.
A propriedade 4 e explicada pela presenca de dois pontos de estabili-dade do potencial, para pontos que estao no interior da regiao cuspidal.
Se o ponto X nao esta na regiao de bifurcacao, entao existe umavizinhanca dele tais que os potenciais sao praticamente iguais, e por-tanto movimentos pequenos quase nao geram mudancas no potencial, eportanto a posicao da roda quase nao muda. Isso explica a propriedade5.
Logo, a cuspide explica todos os fenomenos que ocorrem na maquinade Zeeman, o que a torna um otimo exemplo da presenca de catastrofesno mundo real.
Referencias
[1] Cross, J. D., Zeeman’s Catastrophe Machine. Disponıvel em:http://lagrange.physics.drexel.edu/flash/zcm/
[2] Golubitsky, M., An Introduction to Catastrophe Theory and its Applications,SIAM Review, Vol. 20, No.2, April 1978, 352-387.
[3] Litherland, T. J. and Siahmakoun, A. Chaotic Behavior of the Zeeman Catas-trophe Machine, Am. J. Phys. 63(5), May 1995, 426-431.
[4] Sotomayor, J., Singularidades de Aplicacoes Diferenciaveis, IMPA, 1976.[5] Stewart, I., Catastrophe Theory, Math. Chronicle, 5, 1977, 140-165.