Embed Size (px)
Citation preview

ANÁLISE DA SENSIBILIDADE DO MODELO DINÂMICO SIMPLIFICADO PARA UMATUBULAÇÃO-SEPARADOR SOB GOLFADAS
Airam Sausen1
1Universidade Regional do Noroeste do Estado do Rio Grande do Sul - Unijuí, Departamento do Física Estatística e Matemática - DeFEM,Rua São Francisco no 501, São Geraldo, 98700000, Ijuí, Brasil, [email protected]
Abstract: The main purpose of this paper is to present sen-sitivity analysis of a dynamic model for a pipeline-separatorsystem under slug flow with 5 (five) coupled nonlinear or-dinary differential equations and 6 (six) tuning parameters.Sensitivity analysis is an important tool in the process ofmodel building, because it shows how the system reacts toa change in their tuning parameters, which increases the un-certainty of the model. It also gives an opportunity to betterunderstand the dynamic behavior of the system.
Keywords: Golfadas, modelagem matemática, análise dasensibilidade.
1. INTRODUÇÃO
A golfada é considerada uma das mais preocupantes ins-tabilidades em indústrias de produção de petróleo. Este tipode escoamento caracteriza-se por fluxo severo e irregular,com ondas de líquido e gás através da seção transversal dalinha de fluxo (i.e., tubulações), ocasionando oscilações depressão e vazão na tubulação e nos equipamentos do pro-cesso tais como: separadores, compressores, bombas de ex-portação, entre outros. É um fenômeno cíclico formado porum bloco de líquido (água+óleo) transportado na golfada, in-tercalado com um volume de gás [1–3].
É importante destacar que a propagação da golfada geradiversos problemas indesejados na produção de petróleo,como por exemplo: alterações de períodos com nenhumaprodução de líquido, seguido de períodos com grande pro-dução de líquido dentro do separador, o que pode ocasionarredução na capacidade de produção, ineficiência da sepa-ração dos componentes da mistura, problemas nos trens decompressão, em alguns casos, quando muito severa, podegerar parada de emergência na plataforma em decorrênciado alto nível de líquido nos separadores, ou até inundações;também provoca desgaste, corrosão e danos nos equipamen-tos do processo [4–6].
Por estes motivos, são necessárias estratégias que evitema golfada na tubulação ou minimizem a mesma nas unidades
de separação, de modo que seus efeitos não se propaguempara os equipamentos do processo. Pesquisas recentes têmmostrado que uma solução promissora para solucionar oproblema da golfada tem sido utilizar estratégias de controlecom realimentação [1, 2, 6–8]. Salienta-se que este procedi-mento é eficiente e econômico, pois é utilizado um númeroreduzido de equipamentos na plataforma e na tubulação, háum menor desgaste dos equipamentos que compõem o pro-cesso, bem como menor custo com instalação e manutenção,e consequentemente é possível melhorar a regularidade e odesempenho do processo, aumentar a confiabilidade opera-cional da planta e, o mais importante, acelerar e aumentar aprodução de petróleo.
Uma alternativa à aplicação de estratégias de controlecom realimentação consiste em fazer uso de um modelomatemático que descreva adequadamente o processo emquestão. Em [3, 9] é apresentado um modelo matemáticopara um sistema tubulação-separador sob regime de fluxocom golfadas através do acoplamento de duas situações: omodelo de uma tubulação sob golfadas [1], e o modelo deum separador cilíndrico horizontal bifásico [10]. Neste ar-tigo este modelo será denominado modelo de Sausen sendoformado por um sistema de 5 (cinco) Equações DiferenciaisOrdinárias (EDOs), não-lineares, acopladas, com 5 (cinco)variáveis de estado, 6 (seis) parâmetros de sintonia (i.e., parâ-metros empíricos) e mais de 40 (quarenta) equações internas,geométricas e de transporte.
Para a realização das simulações e aplicação de estraté-gias de controle com realimentação no modelo de Sausen,primeiramente, é necessário efetuar a sintonia do mesmo,isto é, o cálculo dos seus parâmetros empíricos. Para esteprocedimento devem ser utilizados dados de um estudo decaso, que podem ser obtidos a partir de uma planta experi-mental, de um simulador comercial, ou de um processo real.Os dados do estudo de caso considerados neste trabalho sãoobtidos dos estudos realizados por Storkaas et al. [1, 2].
Após a realização da sintonia do modelo de Sausen [3, 9]destaca-se que é importante verificar o quanto as principais
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 689

variáveis do modelo, tais como, fluxos mássicos de líquido ede gás, pressões na tubulação e no separador, variam de com-portamento considerando uma variação nos seus parâmetrosde sintonia. Esta análise, denominada análise da sensibili-dade, é uma ferramenta importante na construção de mode-los matemáticos, além disso, proporciona uma melhor com-preensão do comportamento dinâmico do sistema para poste-riormente aplicação de estratégias de controle com realimen-tação.
Portanto, o principal objetivo deste artigo é realizar aanálise da sensibilidade no modelo de Sausen e verificar qualo parâmetro de sintonia que exerce maior influência nas prin-cipais variáveis do modelo. O presente artigo está organizadocomo segue. Na Seção 2 são descritas as equações do modelode Sausen. Na Seção 3 é realizada a análise da sensibilidadedo modelo de Sausen. Na Seção 4 são apresentados os resul-tados das simulações e sua análise. E por fim, na Seção 5 sãoapresentadas as conclusões.
2. O MODELO
Nesta seção são apresentadas as principais equações domodelo de Sausen que é formado por um sistema de 5 (cinco)EDOs, não-lineares, acopladas, baseadas nas equações deconservação de massa do sistema. A seguir as equações (1)-(3) descrevem a dinâmica da tubulação, e as equações (4)-(5)descrevem a dinâmica do separador
mL(t) = mL,in −mL,out(t) (1)
mG1(t) = mG,in −mGint(t) (2)
mG2(t) = mG1(t)−mG,out(t) (3)
N(t) =
√r2s−(rs−N(t))2
2CρLN(t)[3rs−2N(t)] [mL,out(t)−mLS,out(t)]
(4)
PG1(t) = {ρLΦ[mG,out(t)−mGS,out(t)]+PG1(t) [mL,out(t)−mLS,out(t)]}/
ρL[VS − VLS(t)](5)
onde: mL(t) é a massa de líquido no ponto-baixo da tubu-lação em kg; mG1(t) é a massa de gás na seção de alimen-tação do encanamento (i.e., volume VG1) em kg, mG2(t) é amassa de gás no topo da tubulação ascendente (i.e., volumeVG2(t)) em kg, N(t) é o nível de líquido dentro do separa-dor em m, e PG1(t) é a pressão do gás dentro do separadorem N/m2; mL(t), mG1(t), mG2(t), N(t), e PG1(t) são res-pectivamente suas derivadas em relação ao tempo; mL,in emG,in são os fluxos mássicos de líquido e gás que entram naseção de alimentação do encanamento em kg/s; mL,out(t) emG,out(t) são os fluxos mássicos de líquido e gás que saematravés da válvula Z no topo da tubulação ascendente e porconseguinte entram no separador em kg/s; mGint(t) é ofluxo mássico de gás interno na tubulação que flui do volumeVG1 para o volume VG2(t) em kg/s; mLS,out(t) é o fluxomássico de líquido que sai através da válvula de líquido doseparador em kg/s; mGS,out(t) é o fluxo mássico de gás quesai através da válvula de gás do separador em kg/s; rs é oraio do separador em m; C é o comprimento do separador emm; ρL é a densidade de líquido em kg/m3; VS é o volume do
separador em m3; VLS(t) é o volume de líquido no separadorem m3; Φ = RT
MGé uma constante; R é a constante universal
do gases ideais (8314 JK.kmol
); T é a temperatura no sistemaem K; MG é o peso molecular do gás em kg/kmol.
O fluxo mássico da mistura mmix,out(t) que sai da tubu-lação para o separador é determinado através da equação sim-plificada da válvula Z, dada por
mmix,out(t) = zK1
√ρT (t)(P2(t)− PG1(t)) (6)
onde: z é a abertura da válvula (0 − 100%); K1 é umparâmetro de sintonia do modelo; ρT (t) é a densidade naválvula em kg/m3; P2(t) é a pressão no topo da tubulaçãoascendente em N/m2.
Considerando o resultado apresentado na equação (6) épossível obter respectivamente o fluxo mássico de líquido
mL,out(t) = αmL (t)mmix,out(t)
e o fluxo mássico de gás
mG,out(t) = [1− αmL (t)]mmix,out(t)
que saem através da válvula Z no topo da tubulação ascen-dente, onde: αm
L (t) é fração de líquido na válvula.O fluxo mássico de líquido e de gás que saem do se-
parador são representados respectivamente pela equação daválvula de líquido dada por
mLS,out(t) = zLK4
√ρL[PG1(t) + gρLN(t)− POL2] (7)
onde: zL é a abertura da válvula (0 − 100%); K4 é umparâmetro de sintonia do modelo; POL2 é a pressão à jusanteda válvula de líquido em N/m2 e considerada constante. Epela equação da válvula de gás
mGS,out(t) = zGK5
√ρG(t)[PG1(t)− PG2] (8)
onde: zG é a abertura da válvula (0 − 100%); K5 é umparâmetro de sintonia do modelo; ρG(t) é a densidade dogás em kg/m3; PG2 é a pressão à jusante da válvula de gásem N/m2 e considerada constante.
Os fluxos mássicos de líquido e gás que entram na seçãode alimentação da tubulação (i.e., mL,in e mG,in) são con-siderados perturbações do processo e podem ser constantes,ou dependentes da pressão, neste trabalho são assumidosconstantes. A seguir são apresentadas as equações que des-crevem o deslocamento de gás e líquido dentro da tubulação.
2.1. Deslocamento de gás na tubulação
O deslocamento de gás ocorre através de uma relação en-tre o fluxo mássico de gás e a variação de pressão dentro datubulação. Os dois principais parâmetros que determinam odeslocamento e a velocidade do gás no sistema são a vari-ação de pressão ΔP (t) = P2(t) − P1(t) na tubulação, e aárea livre no ponto-baixo dada pelo nível de líquido relativof(h1(t)) = (H1 − h1(t))/H1. Logo, a equação que repre-senta o deslocamento de gás, quando h1(t) < H1, é dadapor
υG1(t) = K2f(h1(t))
√P1(t)− P2(t)− gρLαL(t)H2
ρG1(t), (9)
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 690

onde: K2 é um parâmetro de sintonia do modelo, P1(t) é apressão na seção de alimentação do encanamento, N/m2;h1(t) é o nível de líquido no ponto-baixo, m; H1 é odiâmetro no ponto-baixo da tubulação, m; H2 é a altura datubulação ascendente, m. Por outro lado, se h1(t) ≥ H1 avelocidade de gás no ponto-baixo é igual a zero.
2.2. Deslocamento de líquido na tubulação
A distribuição de líquido ocorre através de uma equaçãode carregamento, ou seja, considera-se que o gás carrega olíquido pela tubulação ascendente, então modela-se direta-mente a fração de volume de líquido αLT (t) que sai atravésda válvula Z no topo da tubulação ascendente. É assumidoque esta transição depende de um parâmetro q(t), logo o car-regamento de líquido é representado pela equação dada por
αLT (t) = α∗LT (t) +qn(t)
1 + qn(t)(αL(t)− α∗LT (t)) (10)
onde:
q(t) =K3ρG1(t)υ
2G1(t)
ρL − ρG1(t)
e K3 e n são parâmetros de sintonia do modelo. Os detalhesda modelagem matemática do modelo de Sausen podem serencontrados em [3, 9] e suas equações internas, de transportee geométricas podem ser encontradas em [1, 3].
3. ANÁLISE DA SENSIBILIDADE
Define-se a análise da sensibilidade de um sistema atravésda quantificação da variação do seu modelo dada uma mu-dança nos seus parâmetros de sintonia, ou seja, a sensibili-dade [11, 12] é definida como uma relação entre um vetor deparâmetros do modelo
α =[α1 α2 . . . αr
]Te um vetor de comportamento dinâmico do sistema
ζ =[ζ1 ζ2 . . . ζs
]T.
O vetor de parâmetros α pode ser decomposto como acombinação linear de outros dois vetores, isto é,
α = α0 +Δα
onde: α0 são os valores nominais dos parâmetros e Δα sãoas variações em torno de α0.
Do mesmo modo a decomposição pode ser realizada como vetor que representa o comportamento dinâmico do sistemaζ, isto é,
ζ = ζ0 +Δζ
onde: ζ0 são os valores nominais do comportamentodinâmico do sistema e Δζ são as variações em torno de ζ0.
Por conseguinte, é possível realizar a análise da sensibili-dade partindo-se de um ponto de operação nominal (α0, ζ0)e verificando-se quais alterações Δα nos parâmetros geramvariações Δζ no comportamento dinâmico do sistema.
O modelo de Sausen, descrito na Seção 2, possui 6 (seis)parâmetros de sintonia formando o seguinte vetor α
α =[ϕ K1 K2 K3 K4 K5
]T. (11)
Os valores nominais dos parâmetros de sintonias do vetorα são apresentados na Tabela 1 e o detalhamento do proce-dimento de sintonia para a determinação destes parâmetrospode ser encontrado em [3, 9].
Tabela 1 – Parâmetros de sintonia para o modelo dinâmico deum sistema tubulação-separador.
ϕ K1 K2 K3 K4 K5
2,55 0, 005 0, 8619 1, 2039 0, 002 0, 0003
O vetor ζ(t)T = Υ que caracteriza o comportamentodinâmico do sistema é dado por
Υ = [P1 P2 mL,out mG,out PG1 N mLS,out mGS,out] .(12)
A análise da sensibilidade é realizada considerando osvetores apresentados nas equações (11) e (12), aplicando aseguinte metodologia: inicialmente é escolhido um dos parâ-metros de sintonia do vetor α (e.g., K1), então altera-se su-cessivamente o valor do mesmo em cada uma das simulaçõesconsiderando-se todos os demais parâmetros (i.e., ϕ, K2,K3, K4 e K5) com seus valores nominais (i.e., de referência),e finalmente são analisados os resultados destas simulaçõesverificando quais alterações ocorrem nos parâmetros que re-presentam o comportamento dinâmico do sistema (i.e, vetorΥ). As simulações são realizadas na ferramenta matemáticaMATLAB [13], e para todos os casos simulados considera-seprimeiramente a abertura da válvula z = 12% (i.e., regime defluxo sem golfadas), e posteriormente z = 20% (i.e., regimede fluxo com golfadas) [9].
4. RESULTADOS E ANÁLISE DAS SIMULAÇÕES
Nesta seção são apresentados os resultados das simula-ções e sua análise considerando a realização da análise dasensibilidade do modelo de Sausen. Observa-se que o ve-tor Υ é composto por 8 (oito) variáveis do modelo, porémaqui serão apresentados os resultados das simulações encon-trados para as seguintes variáveis: P1(t) e P2(t) que são, res-pectivamente, as pressões na seção de alimentação e no topoda tubulação ascendente, sendo responsáveis pela formaçãoda golfada na mesma; e N(t) e PG1(t) que são, respecti-vamente, o nível de líquido e a pressão do gás no separador,sendo responsáveis pela dinâmica dos fluidos dentro do vaso.Os demais resultados para as outras variáveis que compõemo vetor Υ do podem ser encontrados em [3].
Para a análise da sensibilidade do modelo de Sausen ini-cialmente variou-se o parâmetro K1 na equação da válvulaZ no topo da tubulação ascendente, equação (6). Observa-se,conforme apresentado na Figura 1, para z = 12%, partindode alterações do valor nominal K1 = 0, 005, que as cur-vas apresentam características da curva principal com os-cilações amortecidas apenas quando o novo K1 está muitopróximo de 0, 005 (valor nominal), ou seja, em K1 = 0, 004e K1 = 0, 006. Para valores superiores, como por exemplo,K1 = 0, 007 e K1 = 0, 008, as curvas apresentam oscilaçõesperiódicas com características diferentes da curva principal.Segundo apresentado na Figura 2, para z = 20%, partindode alterações do valor nominal K1 = 0, 005, as curvasapresentam características da curva principal com oscilações
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 691
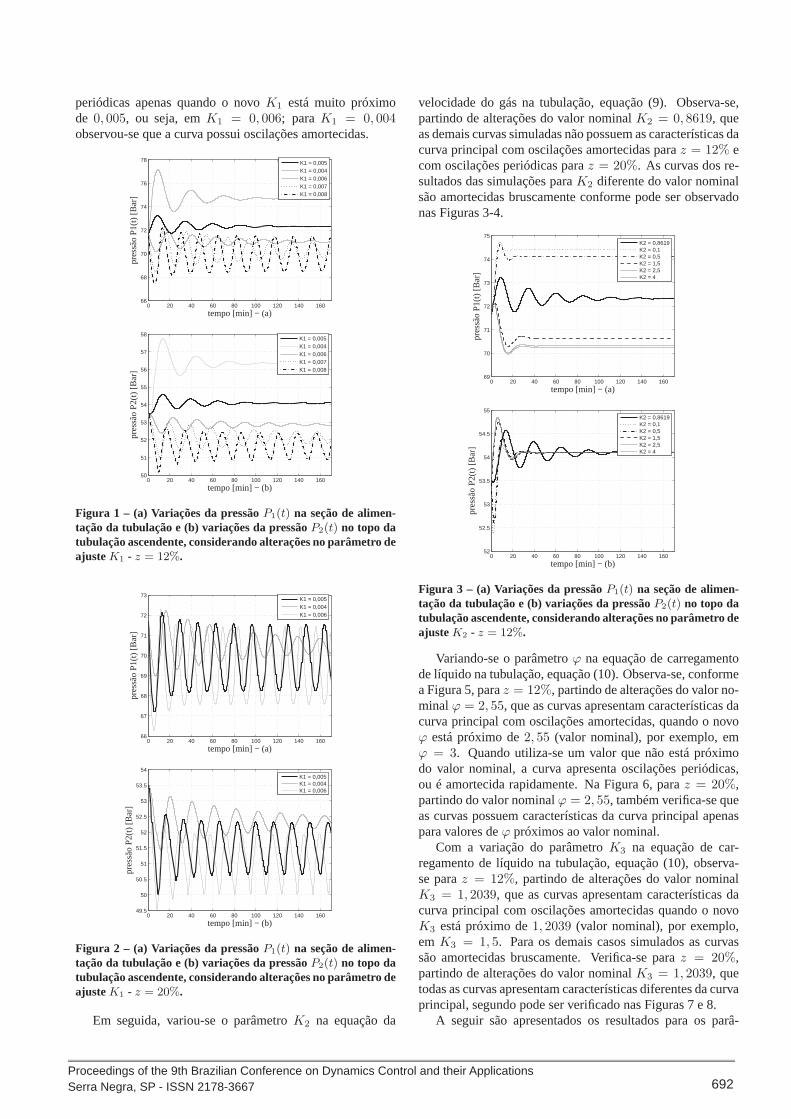
periódicas apenas quando o novo K1 está muito próximode 0, 005, ou seja, em K1 = 0, 006; para K1 = 0, 004observou-se que a curva possui oscilações amortecidas.
0 20 40 60 80 100 120 140 16066
68
70
72
74
76
78
pres
são
P1(t
) [B
ar]
tempo [min] − (a)
K1 = 0,005K1 = 0,004K1 = 0,006K1 = 0,007K1 = 0,008
0 20 40 60 80 100 120 140 16050
51
52
53
54
55
56
57
58
tempo [min] − (b)
pres
são
P2(t)
[Bar
]
K1 = 0,005K1 = 0,004K1 = 0,006K1 = 0,007K1 = 0,008
Figura 1 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K1 - z = 12%.
0 20 40 60 80 100 120 140 16066
67
68
69
70
71
72
73
pres
são
P1(t)
[Bar
]
tempo [min] − (a)
K1 = 0,005K1 = 0,004K1 = 0,006
0 20 40 60 80 100 120 140 16049.5
50
50.5
51
51.5
52
52.5
53
53.5
54
tempo [min] − (b)
pres
são
P2(t)
[Bar
]
K1 = 0,005K1 = 0,004K1 = 0,006
Figura 2 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K1 - z = 20%.
Em seguida, variou-se o parâmetro K2 na equação da
velocidade do gás na tubulação, equação (9). Observa-se,partindo de alterações do valor nominal K2 = 0, 8619, queas demais curvas simuladas não possuem as características dacurva principal com oscilações amortecidas para z = 12% ecom oscilações periódicas para z = 20%. As curvas dos re-sultados das simulações para K2 diferente do valor nominalsão amortecidas bruscamente conforme pode ser observadonas Figuras 3-4.
0 20 40 60 80 100 120 140 16069
70
71
72
73
74
75
pres
são
P1(t)
[Bar
]
tempo [min] − (a)
K2 = 0,8619K2 = 0,1K2 = 0,5K2 = 1,5K2 = 2,5K2 = 4
0 20 40 60 80 100 120 140 16052
52.5
53
53.5
54
54.5
55
tempo [min] − (b)
pres
são
P2(t)
[Bar
]
K2 = 0,8619K2 = 0,1K2 = 0,5K2 = 1,5K2 = 2,5K2 = 4
Figura 3 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K2 - z = 12%.
Variando-se o parâmetro ϕ na equação de carregamentode líquido na tubulação, equação (10). Observa-se, conformea Figura 5, para z = 12%, partindo de alterações do valor no-minal ϕ = 2, 55, que as curvas apresentam características dacurva principal com oscilações amortecidas, quando o novoϕ está próximo de 2, 55 (valor nominal), por exemplo, emϕ = 3. Quando utiliza-se um valor que não está próximodo valor nominal, a curva apresenta oscilações periódicas,ou é amortecida rapidamente. Na Figura 6, para z = 20%,partindo do valor nominal ϕ = 2, 55, também verifica-se queas curvas possuem características da curva principal apenaspara valores de ϕ próximos ao valor nominal.
Com a variação do parâmetro K3 na equação de car-regamento de líquido na tubulação, equação (10), observa-se para z = 12%, partindo de alterações do valor nominalK3 = 1, 2039, que as curvas apresentam características dacurva principal com oscilações amortecidas quando o novoK3 está próximo de 1, 2039 (valor nominal), por exemplo,em K3 = 1, 5. Para os demais casos simulados as curvassão amortecidas bruscamente. Verifica-se para z = 20%,partindo de alterações do valor nominal K3 = 1, 2039, quetodas as curvas apresentam características diferentes da curvaprincipal, segundo pode ser verificado nas Figuras 7 e 8.
A seguir são apresentados os resultados para os parâ-
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 692

0 20 40 60 80 100 120 140 16066
67
68
69
70
71
72
73
pres
são
P1(t
) [B
ar]
tempo [min] (a)
K2 = 0,8619K2 = 0,1K2 = 0,5K2 = 1,5K2 = 2,5K2 = 4
0 20 40 60 80 100 120 140 16050
50.5
51
51.5
52
52.5
53
53.5
tempo [min] (b)
pres
são
P2(t
) [B
ar]
K2 = 0,8619K2 = 0,1K2 = 0,5K2 = 1,5K2 = 2,5K2 = 4
Figura 4 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K2 - z = 20%.
0 20 40 60 80 100 120 140 16070.5
71
71.5
72
72.5
73
73.5
74
74.5
75
pres
são
P1(t
) [B
ar]
tempo [min] (a)
phi =2,55phi = 0,5phi = 1phi = 2phi = 3phi = 4phi = 8
0 20 40 60 80 100 120 140 16052.5
53
53.5
54
54.5
55
55.5
tempo [min] (b)
pres
são
P2(t
) [B
ar]
phi = 2,55phi = 0,1phi = 1phi = 2phi = 3phi = 4phi = 8
Figura 5 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste ϕ - z = 12%.
metros de sintonia do separador. Na sequência varia-se oparâmetro K4 na equação da válvula de líquido do separa-dor, equação (7). Veri ca-se para z = 12% e z = 20%,partindo de alterações do valor nominal de K4 = 0, 002 paraK4 = 0, 0015 e então para K4 = 0, 0025, que houveram
0 20 40 60 80 100 120 140 16066
67
68
69
70
71
72
73
pres
são
P1(t
) [B
ar]
tempo [min] (a)
phi = 2,55phi = 0,5phi = 1phi = 2phi = 3phi = 4
0 20 40 60 80 100 120 140 16049.5
50
50.5
51
51.5
52
52.5
53
53.5
54
tempo [min] (b)
pres
são
P2(t
) [B
ar]
phi = 2,55phi = 0,5phi = 1phi = 2phi = 3phi = 4
Figura 6 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste ϕ - z = 20%.
0 20 40 60 80 100 120 140 16070
70.5
71
71.5
72
72.5
73
73.5
74
74.5
75
pres
são
P1(t
) [B
ar]
tempo [min] (a)
K3 = 1,2039K3 = 0,001K3 = 0,1K3 = 1,5K3 = 2,5K4 = 4
0 20 40 60 80 100 120 140 16052
52.5
53
53.5
54
54.5
55
tempo [min] (b)
pres
são
P2(t
) [B
ar]
K3 = 1,2039K3 = 0,001K3 = 0,1K3 = 1,5 K3 = 2,5K3 = 4
Figura 7 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K3 - z = 12%.
alterações na condição de equilíbrio do tanque, ou seja, onível de líquido no tanque aumentou quando K4 foi reduzido,e diminuiu quando K4 foi aumentado, o mesmo ocorrendopara a pressão do gás, conforme pode ser observado nas Fi-guras 9 e 10.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 693

0 20 40 60 80 100 120 140 16066
67
68
69
70
71
72
73
pres
são
P1(t
) [B
ar]
tempo [min] (a)
K3 = 1,2039K3 = 0,001K3 = 0,1K3 = 1,5K3 = 2,5K3 = 4
0 20 40 60 80 100 120 140 16049.5
50
50.5
51
51.5
52
52.5
53
53.5
54
tempo [min] (b)
pres
são
P2(t
) [B
ar]
K3 = 1,2039K3 = 0,001K3 = 0,1K3 = 1,5K3 = 2,5K3 = 4
Figura 8 – (a) Variações da pressão P1(t) na seção de alimen-tação da tubulação e (b) variações da pressão P2(t) no topo datubulação ascendente, considerando alterações no parâmetro deajuste K3 - z = 20%.
0 5 10 15 20 25 30 35 40
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
tempo [min] (a)
níve
l N(t
) [m
]
K4 = 0,002K4 = 0,0015K4 = 0,0025
0 5 10 15 20 25 30 35 4049.7
49.8
49.9
50
50.1
50.2
50.3
50.4
50.5
tempo [min] (b)
pres
são
no s
epar
ador
PG
1(t)
[ba
r]
K4 = 0,002K4 = 0,0015K4 = 0,0025
Figura 9 – (a) Variações do nível de líquido N(t) e (b) vari-ações da pressão do gás PG1(t), considerando alterações noparâmetro de ajuste K4 - z = 12%.
E por m, variou-se o parâmetro K5 na equação daválvula de gás do separador, equação (8). Observa-se paraz = 12% e z = 20%, partindo de alterações do valor no-minal de K5 = 0, 0003 para K5 = 0, 0002 e então paraK5 = 0, 00035, que houveram alterações na condição deequilíbrio do tanque, ou seja, o nível de líquido no tanque
subiu quando K5 foi aumentado, e diminuiu quando K5 foireduzido, o mesmo acontecendo para a pressão do gás dentrodo vaso, como pode ser observado nas Figuras 11 e 12.
0 5 10 15 20 25 30 350.4
0.5
0.6
0.7
0.8
0.9
1
1.1
tempo [min] (a)
níve
l N(t
) [m
]
K4 = 0,002K4 = 0,0015K4 = 0,0025
0 5 10 15 20 25 30 3549.2
49.4
49.6
49.8
50
50.2
50.4
50.6
50.8
51
51.2
tempo [min] (b)
pres
são
no s
epar
ador
PG
1(t)
[ba
r]
K4 = 0,002K4 = 0,0015K4 = 0,0025
Figura 10 – (a) Variações do nível de líquidoN(t) e (b) variaçõesda pressão do gás PG1(t) dentro do separador, considerandoalterações no parâmetro de ajuste K4 - z = 20%.
0 5 10 15 20 25 30 350.4
0.5
0.6
0.7
0.8
0.9
1
1.1
tempo [min] (a)
níve
l N(t
) [m
]
K5 = 0,0003K5 = 0,0002K5 = 0,00035
0 5 10 15 20 25 30 3549.7
49.8
49.9
50
50.1
50.2
50.3
50.4
50.5
tempo [min] (b)
pres
são
no s
epar
ador
PG
1(t)
[ba
r]
K5 = 0,0003K5 = 0,0002K5 = 0,00035
Figura 11 – (a) Variações do nível de líquido N(t) e (b) vari-ações da pressão do gás PG1(t), considerando alterações noparâmetro de ajuste K5 - z = 12%.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 694

0 5 10 15 20 25 30 350.4
0.5
0.6
0.7
0.8
0.9
1
tempo [min] (a)
níve
l N(t
) [m
]
K5 = 0,0003K5 = 0,0002K5 = 0,00035
0 5 10 15 20 25 30 3549.2
49.4
49.6
49.8
50
50.2
50.4
50.6
50.8
51
tempo [min] (b)
pres
são
no s
epar
ador
PG
1(t)
[ba
r]
K5 = 0,0003K5 = 0,0002K5 = 0,00035
Figura 12 – (a) Variações do nível de líquidoN(t) e (b) variaçõesda pressão do gás PG1(t) dentro do separador, considerandoalterações no parâmetro de ajuste K5 - z = 20%.
5. CONCLUSÕES
A partir do resultado das simulações, observa-se que, dosparâmetros de sintonia simulados, o modelo foi mais sensívelas alterações nos parâmetros K2 na equação da velocidadedo gás e K3 na equação de carregamento de líquido na tubu-lação ascendente. Tais parâmetros in uenciam diretamentena formação da golfada no sistema, pois devido as variaçõesdas pressões entre a seção de alimentação e o topo da tubu-lação (i.e., P1(t) > P2(t)) há alterações na velocidade dogás que gera o uxo com golfadas na tubulação.
Conclui-se que as alterações destes parâmetros (i.e., K2 eK3) acarretam mudanças signi cativas nos resultados das si-mulações quando comparadas com as curvas principais comos seus respectivos valores nominais. Ou seja, as novas cur-vas com outros valores para estes parâmetros não possuemcaracterísticas da curva principal, pois não há oscilaçõesdecrescentes que caracterizam o regime de uxo sem gol-fadas ou oscilações periódicas que descrevem as golfadas,observam-se curvas que são amortecidas bruscamente. Demodo geral, veri ca-se que os parâmetros de sintonia do mo-delo dinâmico para uma tubulação-separador devem estar de-vidamente sintonizados para somente assim representaremcoerentemente o regime de uxo com golfadas, tanto natubulação quanto no separador.
Referências
[1] E. Storkaas, “Stabilizing control and controllability:Control solutions to avoid slug ow in pipeline-risersystems,” PhD Thesis, Norwegian University of Sci-ence and Technology, Norwegian, June 2005.
[2] E. Storkaas, S. Skogestad, and J. M. Godhan, “A low-
dimensional dynamic model of severe slugging for con-trol design and analysis,” in 11th International Confer-ence on Multiphase flow (Multiphase03), San Remo,Italy, June 2003, pp. 117–133.
[3] A. Sausen, “Modelagem matemática de um sistematubulação-separador sob regime de uxo com golfadase controle de nível considerando um algoritmo de erro-quadrático,” Tese de Doutorado, Universidade Federalde Campina Grande, Brasil, Julho 2009.
[4] M. C. M. Campos, P. Laureiro, and A. M. Borges, “No-vas estratégias de controle para a plataforma de petróleop-55,” in Rio Oil e Gas Expo and Conference 2006, Riode Janeiro, 2006, pp. 1–8.
[5] M. C. M. de Campos, L. A. Costa, A. E. Torres, andD. C. Schmidt, “Controle avançado dos níveis dos se-paradores de plataformas de produção,” in 1 CICAPCongresso de Instrumentação, Controle e Automaçãoda Petrobrás (I CICAP), Rio de Janeiro, 2008.
[6] M. J. Godhavn, F. P. Mehrdad, and P. Fuchs, “Newslug control strategies, tuning rules and experimentalresults,” Journal of Process Control, vol. 15, pp. 547–577, 2005.
[7] K. Havre, K. Stornes, and H. Stray, “Taming slug owin pipelines,” in ABB review, no. 4, April 2000, pp. 55–63.
[8] K. Havre and M. Dalsmo, “Active feedback control asa solution to severe slugging,” SPE Production and Fa-cilities, SPE 79252, pp. 138–148, 2002.
[9] A. Sausen and P. R. Barros, “Modelo dinâmico simpli-cado para um sistema encanamento-Riser-separador
considerando um regime de uxo com golfadas,”Tendências em Matemática Aplicada e Computacional,pp. 341–350, 2008.
[10] ——, “Modelagem matemática de um separador cilín-drico horizontal bifásico considerando um sistemaencanamento-riser de uxo com golfadas.” in Dincon08- 7th Brazilian Conference on Dynamics, Control andApplications, Presidente Prudente, Brasil, 2008, pp. 1–8.
[11] D. G. Cacuci, Sensitivity and Uncertainty Analysis The-ory. New York: Chapman e Hall/CRC, 2003.
[12] P. M. Frank, Introduction to System Sensitivity Theory.New York: Academic Press, 1978.
[13] S. J. Chapman, Programação em MATLAB para En-genheiros. Pioneira Thomson, 2003.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their ApplicationsSerra Negra, SP - ISSN 2178-3667 695